Embed Size (px)
Citation preview

Current Matching Control System for Multi-Terminal DC
Transmission to Integrate Offshore Wind Farms
J. Zhu, C. Booth, G.P. Adam Department of Electrical and Electronic Engineering,
University of Strathclyde, Glasgow G1 1XW, UK.
Email: [email protected]
Keywords: HVDC, voltage source converter, multi-terminal
DC, control.
Abstract
The inherent features of Voltage Source Converters (VSCs)
are attractive for practical implementation of Multi-Terminal
HVDC transmission systems (MTDC). MTDC can be used
for large-scale integration of offshore wind power with
onshore grids. However, many of the control strategies for
MTDC that have been proposed previously for offshore wind
farm integration depend on local control of the wind turbine
generators.
This paper proposes a new control strategy, termed Current
Matching Control (CMC), which can be used with any
number of converter terminals, and is independent of the
types of wind turbines used within each wind farm. The
proposed CMC matches the current reference of the grid side
converter to that of the wind farm side converters. In order to
achieve such current matching, a telecommunication system
will be required to facilitate calculations of the grid side
current references to be carried out in real time. To validate
the performance of the proposed control strategy, a generic
four-terminal MTDC network, which integrates two offshore
wind farms with two mainland grids, is simulated and results
relating to several steady state and transient scenarios are
presented.
1 Introduction
There has been a tremendous pace of development of large-
scale offshore wind farms in recent years. It is anticipated that
there will be an approximate increase of 26.6 GW in
aggregate generation capacity over the period from 2009/10
to 2016/17 in the UK, 11.7 GW of which will be contributed
by wind power [1]. More broadly, the European Wind Energy
Association has, in its “high wind” scenario, a target of 180
GW from wind energy sources in by 2020, of which 35 GW
will be sourced from offshore wind installations. This
capacity target for offshore wind increases to 120 GW by
2030 [2].
These targets, if they are achieved, will have great impact on
power transmission design, planning, construction and
operation. Many offshore wind farms will require long-
distance power transmission systems. AC may not be suitable
due to high power losses over longer distances. Classical line-
current-commutated (LCC) HVDC transmission has been
used for many HVDC installations [3], but is not well suited
to MTDC, in comparison to VSC. A summary of the
advantages of VSC over LCC is listed below:
VSC has a smaller footprint which facilitates offshore
installations of reduced platform size [3];
LCC requires large filtering components;
VSC provides additional reactive power support and AC
voltage regulation for wind farms connected to weak AC
systems, and possesses black-start capability;
VSC improves wind farm AC fault ride-through
capability and facilitates Grid Code compliance at
reduced costs [4];
Power reversal can be achieved in VSC without changing
the DC voltage polarity, facilitating the realisation of a
flexible MTDC transmission system.
MTDC transmission systems have attracted much attention
for wind farm integration [5][6][7]. Firstly, MTDC reduces
converter numbers when compared to numerous point-to-
point HVDC solutions. Secondly, it is conceivable that, due to
limited correlations of weather systems in geographically
dispersed wind farm locations, the overall variability of wind
power may be reduced by interconnecting many
geographically-dispersed wind farm systems via a large-area
MTDC system, thus increasing the overall availability of
energy. In future, energy storage devices may be integrated
with MTDC system [1], which further supports energy
availability and quality of supply. MTDC is also being
proposed as the means of interconnecting independent large-
scale AC power systems, (e.g. European super-grid proposal
[5] to promote the interconnection of Norwegian hydro,
French nuclear, Sahara solar and North sea wind power into a
common MTDC) to resolve local power shortages or
congestion, to enable international power sharing, and to
provide an excellent level of overall power system reliability.
As discussed in [5], there are many challenging obstacles to
the introduction of MTDC. The control system for an MTDC
must be robust, coordinated and reliable, as problems with
one terminal have the potential to affect the entire MTDC
network. A number of control strategies are proposed [6]
[8][9] which will be introduced later. These strategies remain
at the modelling and testing stages of development. Critical
concerns about these strategies are the controllability and
reliability of MTDC systems, as most of the proposed
strategies manage an MTDC system without use of
communications between terminals. The proposed current
matching control strategy employs minimal (in terms of
required traffic and bandwidth) telecommunications between
terminals in an MTDC network. While there may be concerns

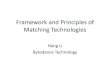
Fig.1 The test MTDC system configuration
over use of communications, modern telecommunication
technologies are increasingly highly developed, reliable and
redundant [10]. Furthermore, risk can be mitigated by
employing redundancy, through continuous monitoring of
telecommunications channels, and ensuring operation can
continue, albeit in a less efficient fashion, if
telecommunications is lost. Operation of the scheme is based
on measurement (discretely, with a step of 1-2ms in this
example) of the total DC current provided by wind farm side
rectifiers (i.e. WFR1 and WFR2 in Fig.1) and allocation
(matching) of this current across the inverters, according to a
pre-determined sharing factor. This is described in more
detail in Section 4. The scheme also provides further
protection for the entire MTDC system by monitoring the DC
voltage. Finally, the system can operate if the
telecommunication system fails, but accurate sharing of the
inverter currents may not be possible.
2 MTDC system configuration
MTDC topology design may vary depending on specific
situations (e.g. the locations of grid connection points and
offshore wind farms, available undersea cable routes). Fig.1
presents a four terminal MTDC system for wind farm
integration, which utilises bi-polar cables R5 with nominal DC
voltage of 200 kV (± 100 kV). On the offshore side, two wind
farms are connected via two voltage source neutral-point
clamped rectifiers (WFR1, WFR2). On the onshore side, two
grid-connected inverters (GCI3, GCI4) feed power to two
independent 2000 MVA equivalent AC power systems. All
VSCs are rated at 200 MVA. Targets of converter control
differ for WFR1 and WFR2, implementing frequency and AC
voltage control at the point of common connection (PCC)
with wind farms, while GCI3 and GCI4 are equipped with a
current controller and DC voltage regulator respectively, in
addition to AC voltage/or reactive power control.
2.1 AC/DC interaction for a VSC
Instead of presenting an in-depth study of the VSC control
system formulae, such as those presented [9] and [7], this
paper focuses on the dynamics of AC and DC interaction,
which is dictated by the converter control. As the control
system for VSC employs vector control in the synchronous
rotating reference frame dq, the current references id_ref and
iq_ref which are derived by the commanded active power Pcomm
and reactive power Qcomm, are given in equation (1). In the
rotating reference frame, the d-axis voltage Vd, aligned with
one of three phases, is equal to the magnitude of AC voltage,
and the q-axis voltage Vq is zero.
,ref ref
comm commd q
d d
P Qi i
V V (1)
Once the current references id_ref and iq_ref are generated, the
inner current control loops adjust the actual id and iq values to
be in accordance with the computed reference values. This
process takes a short period to complete and is determined by
the natural frequency of the converter control dynamic in
Laplace equation (2), which contains the proportional gain
(kp) and the integral gain (ki) of the proportional-and-integral
(PI) controller, reactor inductance (L) and resistance (R):
2
p i
p iref
k kdq L L
R k kdq
L L
i
i s s
(2)
From the DC side perspective of the VSC in Fig.2, the DC
voltage udc across the converter or the output capacitors, the
DC current idc injected by the converter, and the current ic
conducted by the DC cables, are related as shown in equation
(3). The capacitors are charged (or discharged) to possess a
certain DC voltage. The current idc injected to the MTDC
network by the converter is calculated from AC side PCC
currents id and iq, pulse-width-modulation index M and
converter terminal voltage angle with respect to the PCC
voltage, using equation (4):
dcdc c
duC i i
dt (3)
cos sindc d qi Mi Mi (4)

2.2 Equivalent MTDC circuit
As demonstrated in Section 2.1, the DC property of individual
VSCs in the MTDC can be represented as a “controlled”
current source, shown in the equivalent circuit in Fig.(2). The
extremely small inductance and capacitance of the DC
network with respect to direct current are neglected.
As the focus of this section is on the analysis of DC network
behaviour, it is essential to analyse the effect of the variation
in DC current idc from one converter station, on either its DC
voltage and/or the DC voltage at other stations. Taking WFR1
as an example, a control action to increase WFR1 current idc1
will quickly charge its DC capacitors and boost its DC
voltage udc1 to a higher value, based on equation (3). The
higher udc1 with respect to other DC node voltages acts to
supply the conducted current ic1 into the MTDC network. The
increased current ic1 charges capacitors at other nodes, until
the voltage levels at all the nodes reach a new higher
equilibrium value. The rectifier DC voltage is slightly higher
than the inverter voltage so that current flows from rectifier
node(s) to inverter node(s). The magnitude of individual
converter DC voltage depends on two elements: (a) the
conducted current though the node; (b) the resistances
between the nodes.
Thus, it can be concluded that a temporary current mismatch
between rectifier and inverter in the MTDC results in an
overall DC voltage variation. As the converter control
systems use DC voltage information to function, it is
desirable to quickly address any DC current surplus (by
increasing exported current) or DC current shortage (by
reducing exported current), so that a stable DC voltage
operating point for the MTDC system will be realised.
Communications between rectifier and inverter nodes in the
system is therefore critical to the operation of this scheme.
3 Previously reported MTDC control
strategies
Historically, there have been two distinct control strategies
used to facilitate power dispatch from DC to AC systems,
namely voltage margin control [9] and voltage droop control
[8] [6].
3.1 Voltage margin control (VMC)
In VMC control, one node’s DC voltage is controlled by a DC
voltage controller (DCVC). This effectively acts as a DC
voltage slack bus, with other VSCs operating in current
control mode as illustrated in equations (1) and (2).
VMC equips all converters with DCVCs, but the DCVC of
only one converter station must be activated. Considering the
V-I characteristic of Fig.3(a), GCI4 has its DC node voltage
controlled at udc4 ref by the activated DCVC, represented as the
solid line. This acts to balance the current flows from
rectifiers WFR1 and WFR2 to inverter GCI3, by automatically
“sliding” its current output along the constant DC voltage
udc4_ref. Inverter GCI4 has an inherent current limit. If this
limit is exceeded (e.g. strong wind pushing more current
though rectifiers into the MTDC), GCI4 will not be able to
maintain the DC voltage, and will operate at its maximum
current output. According to the analysis in Section 2.2, the
DC network voltage will continuously rise in line with current
“surplus” in the MTDC network. The voltage will ultimately
rise to a new level (udc3_ref) that activates the back-up DCVR
in the other inverter GCI3. In this case, GCI3 begins
maintaining the MTDC voltage at udc3_ref, the dashed line in
Fig.3(a). The term “voltage margin” refers to the difference
between udc4 _ref and udc3_ref in Fig.3(a).
3.2 Voltage droop control (VDC)
VDC basically has multiple activated DCVCs (in both of the
inverters in this example). The two DCVCs are controlled at
different levels for inverter current dispatch, as shown in
Fig.3(b). The V-I droop characteristic is obeyed by GCI3 to
share the total current with GCI4. To demonstrate the droop
operation, for example, in order to increase the current of
GCI3 and decrease GCI4 based on the droop characteristic, the
DCVC in GCI3 converter control must lower the voltage
reference udc3_ref and then its current output “slides” along the
droop to the right hand side, to output more current.
4 Proposed current matching control strategy
As discussed in Section 2.2, a stable DC network operating
point can be achieved by quickly acting to reduce any
mismatch between rectifier and inverter DC currents. As both
WFR1 and WFR2 inject all the power generated by wind farms
into MTDC network, they will operate in current control
Fig.2 DC equivalent circuit for the MTDC
Fig.3 MTDC control strategies: (a) voltage margin (b) voltage droop

mode. GCI3 and GCI4 will operate using the proposed CMC
in order to address the shortcomings of the VMC and VDC
control, regarding DC current mismatch that may arise during
changes in wind power generation. The detailed operation of
the scheme is now presented.
4.1 Converter operating states
To facilitate the development of the proposed control
strategy, it is important to understand VSC operating states
with their control references in the MTDC system. The
following equations (5) and (6) are given, referring to Fig.2:
1 1 1 2 2 2S dc c dc cu u R i u R i (5)
3 3 3 4 4 4S dc c dc cu u R i u R i (6)
uS is the sending end voltage and uR is the voltage at the
receiving end of the DC link. ic1 to ic4 are the rectifier and
inverter currents as shown in Fig.2. R5 is given by:
5 5S R cu u R i (7)
ic5 is the current through the DC link as shown in Fig.2.
Kirchhoff’s current law dictates that:
1 2 3 4 0dc dc dc dci i i i (8)
As demonstrated in VMC and VDC, GCI4 has its DCVC
activated to control DC voltage at udc4; the other converters
WFR1, WFR2 and GCI3 control their currents at idc1 idc2 and
idc3 respectively. Therefore, by combining equation (5), (6),
(7) and (8), the following converter operating state matrix,
which incorporates DC network resistance, can be derived:
1 11 4 5 4 5 4
2 24 5 4 5 4
3 34 4 3 4
4 4
1
1
( ) 1
1 1 1 0
dc dc
dc dc
dc dc
c dc
u iR R R R R R
u iR R R R R
u iR R R R
i u
(9)
4.2 Current matching control principle
Fig.4 shows the communicated variables of the proposed
CMC for an MTDC. The green blocks in Fig.1 and Fig.4 are
telecommunication feedback signals “idc1”and “idc2” from the
rectifiers WFR1 and WFR2, based on equation (4). Feedback
signal “udc4” from GCI4 is used for over- or under-voltage
protection. The current reference for GCI3 converter is
continuously updated by the proposed CMC and transmitted
to the GCI3 vector control, via the communicated control
signal “idc3_ref”.
Modern wireless communication system has been proposed in
HVDC application to secure power reliability [12] and it is
here used here to favour the CMC strategy for the MTDC
system. Fig.5 illustrates the CMC inner control logic, where
the total rectifier current from WFR1 and WFR2 is the sum of
feedback signals “idc1”and “idc2”. Rectified current is divided
between the inverters GCI3 and GCI4 by applying a sharing
factor KS. KS represents the portion of the expected power to
be exported from the MTDC network through GCI4, given by
equation (10). Accordingly, the reference current idc3 for GCI3
is given by equation (11):
4 1 2( )dc S dc dci K i i (10)
3 1 2(1 )( )dc S dc dci K i i (11)
DC current reference for idc3 is transmitted from the CMC to
the GCI3 converter control system, to produce a commanded
active power reference, given in equation (12):
3 3 3comm dc dcP i u (12)
In this way, GCI4 with activated DCVC maintains the current
balance in the MTDC network, but GCI3 also acts to
effectively preserve the current matching by adjusting its
output active power, using the data relating to the total
rectified current. By setting a proper sharing factor KS,
accurate current allocation between GCI3 and GCI4 is
achieved. For example, a setting of KS=0.4 will allocate 40%
of the total current to GCI4, with the remaining 60% allocated
to GCI3.
Additionally in Fig.5, there is an over-voltage and under-
voltage protection function placed within the main control
loop in Fig.5. It will detect MTDC over-voltage or under-
voltage by monitoring the feedback signal DC voltage “udc4”
at GCI4, and will trigger the back-up DCVR in GCI3 if udc4
exceeds an upper or lower constraint value (set to 180 kV and
220 kV in this simulation).
In the event of telecommunication failure, which could be
detected by the loss of data, or by use of a standard
communications health monitoring signal, GCI3 also adopts a
triggering voltage which is higher (230 kV) than the higher
DC voltage protection constraint of GCI4 (220 kV). If this
voltage is exceeded, the converter control system in GCI3 will
trigger its back-up DCVR in any case. With the CMC strategy,
the converter operating states can be ascertained with
reference to equation (13):
1 11 4 5 4 5 4
2 24 5 4 5 4
3 1 24 4 3 4
4 4
1
1
(1 )( )( ) 1
1 1 1 0
dc dc
dc dc
dc S dc dc
c dc
u iR R R R R R
u iR R R R R
u K i iR R R R
i u
(13)
Fig.4 The Central CMC with communicated variables
Fig.5 CMC and the additional protection loop

5 Performance Evaluation
For the performance evaluation of the proposed CMC
strategy, a generic four-terminal MTDC network with each
converter station rated at 200MVA is simulated in Matlab
SimPowerSystems [14], as shown in Fig.1. The central CMC
unit is placed in an independent block from the converter
current control systems of each of the four converters. DC
cable resistances are obtained from typical HVDC cable
parameters [15] and copper resistivity at 0 in [16]. This
results in modelled resistance values of 1.61 for R2 and R4,
0.32 for R1 and R3, and 1.94 for R5. The performance of
the MTDC using the proposed CMC is examined, under
steady state and fault conditions. Several events have been
simulated, and details are listed in Table 1.
Fig.6 shows the direct current injected into the DC network
from the wind farm rectifiers WFR1 and WFR2, while Fig.7
illustrates the direct current flow from the DC network into
the grid connected inverters GCI3 and GCI4 (the red dashed
line represents the reference current idc3ref for GCI3, calculated
by the CMC). Initially, GCI3 and GCI4 share the current flow
based on the specified sharing factor KS=0.6, that is 60% for
GCI4, and 40% for GCI3. At t=1s, when KS is changed from
0.6 to 0.4, a new current reference is assigned to GCI3 to
increase its DC current, and the current quickly tracks the
reference change. GCI4 is observed to decrease its current
from 60% to 40%.
At t=3s, due to the simulated increase in wind power
production (a gust simulated by a step change in wind speed),
the active power references for WFR1 and WFR2 change and,
as shown in Fig.7, their DC current input to the MTDC rises
to 0.7 and 0.5 pu respectively. This increased input current is
exported and shared correctly by GCI3 and GCI4, based on KS.
Fig.8 presents the DC voltage of WFR1, WFR2, GCI3 and
GCI4. At t=5s, there is a severe AC voltage dip due to a
100ms duration three-phase-to-earth fault at PCC4. In this
case, GCI4 contributes limited current to the fault to support
the grid voltage at PCC4 until the fault is cleared. It can be
noticed that a transient DC over-current occurs not only at
GCI4 but also at WFR1, WFR2 and GCI3. This is due to the
temporary reduction in the power transfer capability of GCI4
as the voltage magnitude at PCC4 collapses. That is because
of DC voltage interactions across all converters. The DC
over-current is effectively limited by the converter current
control system to no greater than 1.8 pu; this current is
exported by the CMC and returns to normal values as soon as
the fault is cleared.
At t=7s, inverter GCI4 is tripped, and the total rectifier current
mismatches the inverter GCI3 current output (sharing only
60% of total current based on KS=0.6) during a short period,
leading to significant over-voltage in the MTDC network as
shown in Fig.8. The protection control loop, depicted in the
lower part of Fig.5, detects the over-voltage when feedback
signal udc4 reaches the upper constraint level (220 kV) at
t=7.3s. Immediately, the CMC triggers the back-up DCVC in
GCI3’s converter controller via communicating the control
signal “Trigger_DCVC_3” (highlighted in orange in Fig.1
and Fig.5), and GCI3 begins controlling the DC voltage to a
higher target level using its DCVC (220 kV in this case). This
is to allow the DC capacitors to absorb the additional power
that cannot be temporarily transferred to the AC side through
GCI3. The CMC therefore can continue to operate the MTDC
after tripping of inverter GCI4.
It should be noted that inverter GCI3 is directly controlled by
the CMC, so plays an important role in continuously adjusting
Table.1: Simulation event description and timescales
Time (s) Events
1 Sharing factor KS changes from 0.6 to 0.4
3 PWFR1 changes from 0.3 to 0.5 pu
PWFR2 changes from 0.4 to 0.7 pu
5 3-ph-earth fault at GCI4 (100 ms)
7 Permanent trip of GCI4
Fig.6 Direct current idc1 and idc2 from WFR1 and WFR2
Fig.7 Direct current idc3 and idc4 from GCI3 and GCI4
Fig.8 DC voltage udc of WFR1,WFR2,GCI3 and GCI4

its DC current export to ensure the DC network current
balance, as shown by the red dashed line in Fig7. Inverter
GCI4, with its DCVC activated, acts as the DC side “slack
bus” to maintain voltage stability in the MTDC system, and it
also contributes to power dispatch in conjunction with
inverter GCI3. There is minimal DC voltage variation
throughout the entire simulation process, with amplitudes of ±
10 kV, until the activation of the DCVC at GCI3 at t=7.3s due
to the loss of GCI4. From this point forward, the DC current
through GCI3 is not controlled by the CMC, and it
automatically acts to balance the MTDC network current, as
shown by the GCI3 DC current reference (red dashed line)
and actual DC current in Fig.7.
From the AC side, the converters are controlled by their
individual vector control systems, as introduced in Section
2.1. Fig.9 shows that the AC-side currents associated with the
converter PCCs under the proposed CMC control are stables
and coordinated. The output AC current/power of inverter
GCI3, which is primarily dictated by the DC current reference
from the CMC in equation (12), is observed to be
continuously varied to achieve the DC current matching
function.
6 Conclusions
This paper has presented the theory and examples of
operation of a novel current matching control (CMC) scheme
for MTDC networks, where the total rectified (input) current
to the MTDC network is used as basis for actively controlling
the inverted (output) current from the network to supplied AC
grid systems. Power sharing and ability to protect against
voltage violations are also features of the scheme. The
scheme requires communications, but can still operate in the
event of loss of communications facilities. The CMC scheme
can be used with any number of converter terminals, and
independent of the types of the wind turbines used within
each wind farm.
The theoretical study and simulation results prove that, with
coordination between the CMC and local converter control
systems, the passiveness of previous control strategies –
voltage margin and voltage droop – is avoided. This enables a
stable and secure DC network operating environment, allows
flexibility of power allocation across inverters, and provides
an effective restriction of DC over-voltages. Future work is
being conducted to analyse the performance of this system
under other scenarios, with different control targets (e.g. to
provide voltage support to connected grid AC systems) and to
more extensively compare performance with other existing
and emerging MTDC control strategies.
Acknowledgement
The authors gratefully acknowledge the kind support of the
Engineering and Physical Sciences Research Council and
Rolls-Royce plc.
References
[1] GB National Grid, Seven Year Statement. Available: http://www.nationalgrid.com/NR/rdonlyres/A2095E9F-A0B8-4FCB-8E66-6F698D429DC5/41470/NETSSYS2010allChapters.pdf.
[2] European Wind Energy Association (EWEA), Wind Enery Scenarios up to 2030. Available: http://www.ewea.org/fileadmin/ewea_documents/documents/publications/reports/purepower.pdf.
[3] W. Long, S. Nilsson. "HVDC transmission: yesterday and today," IEEE Power and Energy Magazine, vol.5, no.2, pp.22-31.
[4] Y. Jiang-Häfner, R. Ottersten. "HVDC with Voltage Source Converters – A Desirable Solution for Connecting Renewable Energies," Large-scale integration of wind power into power systems, Germany.
[5] D. Van Hertem, M. Ghandhari. “Multi-terminal VSC HVDC for the European supergrid: obstacles,” Renewable & Sustainable Energy Reviews (Elsevier).
[6] L. Xu, L. Yao. "DC voltage control and power dispatch of a multi-terminal HVDC system for integrating large offshore wind farms," IET Renewable Power Generation , vol.5, no.3, pp.223-233.
[7] J. Zhu, C. Booth. "Future multi-terminal HVDC transmission systems using Voltage source converters," 2010 45th International Universities Power Engineering Conference (UPEC).
[8] G.P. Adam, O. Anaya-Lara, G. Burt. "Multi-terminal DC transmission system based on modular multilevel converter," Proceedings of the 44th International Universities Power Engineering Conference (UPEC).
[9] T. Nakajima, S. Irokawa. "A control system for HVDC transmission by voltage sourced converters," Power Engineering Society Summer Meeting, 1999. IEEE , vol.2, pp.1113-1119.
[10] M. Chen, M. Huang, Y. Ting, H. Chen, T. Li. "High-Frequency Wireless Communications System: 2.45-GHz Front-End Circuit and System Integration," IEEE Transactions on Education, vol.53, no.4, pp.631-637.
[11] A. Abu-Siada, S. Islam. "Application of SMES Unit in Improving the Performance of an AC/DC Power System,", IEEE Transactions on Sustainable Energy, vol.2, no.2, pp.109-121.
[12] Jiuping Pan; Nuqui, R.; Srivastava, K.; Jonsson, T.; Holmberg, P.; Hafner, Y.-J.; , "AC Grid with Embedded VSC-HVDC for Secure and Efficient Power Delivery," Energy 2030 Conf., 2008. ENERGY 2008. IEEE , vol., no., pp.1-6, 17-18 Nov. 2008.
[13] S. Cole, J. Beerten, R. Belmans. "Generalized Dynamic VSC MTDC Model for Power System Stability Studies," IEEE Transactions on Power Systems, vol.25, no.3, pp.1655-1662.
[14] MathWorks. "VSC-Based HVDC Link," Available: http://www.mathworks.com/help/toolbox/physmod/powersys/ug/f8-9059.html.
[15] ABB, HVDC Light Cables- Submarine and land power cables, Available: http://www05.abb.com/global/scot/scot245.nsf/veritydisplay/1591f139098f62e5c1257154002f9801/$file/hvdc%20light%20power%20cables.pdf.
[16] D. R. Lide. CRC Handbook of Chemistry and Physics 75th ed. Boca Raton, CRC Press.
Fig.9 AC current output at PCCs of WFR1,WFR2,GCI3 and GCI4



![CHEESE - Plaza Suites Silicon Valley · [cheese / creme] Pt. Reyes Cheese [cheese] Coke Farms [sunchoke / brussels] County Line Farms [greens] Frog Hollow Farms [pears] Riverdog Farms](https://img.dokumen.tips/doc/110x75/5e87edbab0cb171f7f4b9339/cheese-plaza-suites-silicon-valley-cheese-creme-pt-reyes-cheese-cheese.jpg)