Embed Size (px)
Citation preview

Из предыдущих лекций
• Особые точки
• Аффинное преобразование
• Поиск лиц Viola-Jones
• Линейные преобразования
2

План лекции
• Решаемые задачи
• Модель камеры
• Фундаментальная матрица
• Поиск объекта с заданными параметрами на изображении
• Kinect как работает
• Определение позы человека с помощью Microsoft Kinect
3
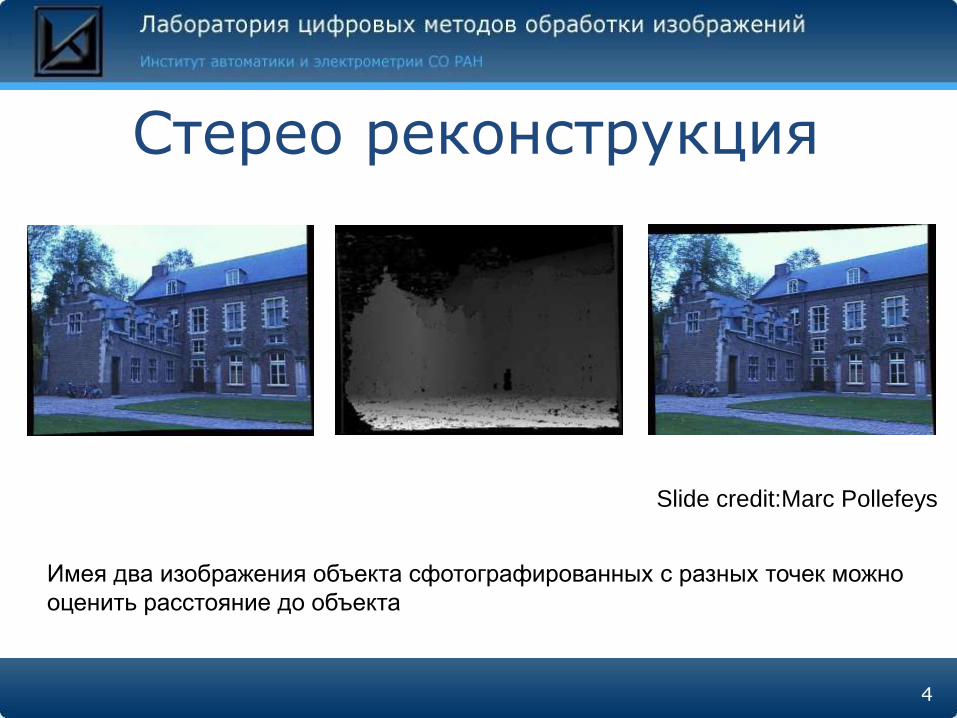
Стерео реконструкция
4
Slide credit:Marc Pollefeys
Имея два изображения объекта сфотографированных с разных точек можно
оценить расстояние до объекта

5
Структура из движения
I1 I2 I10
Slide credit:Marc Pollefeys
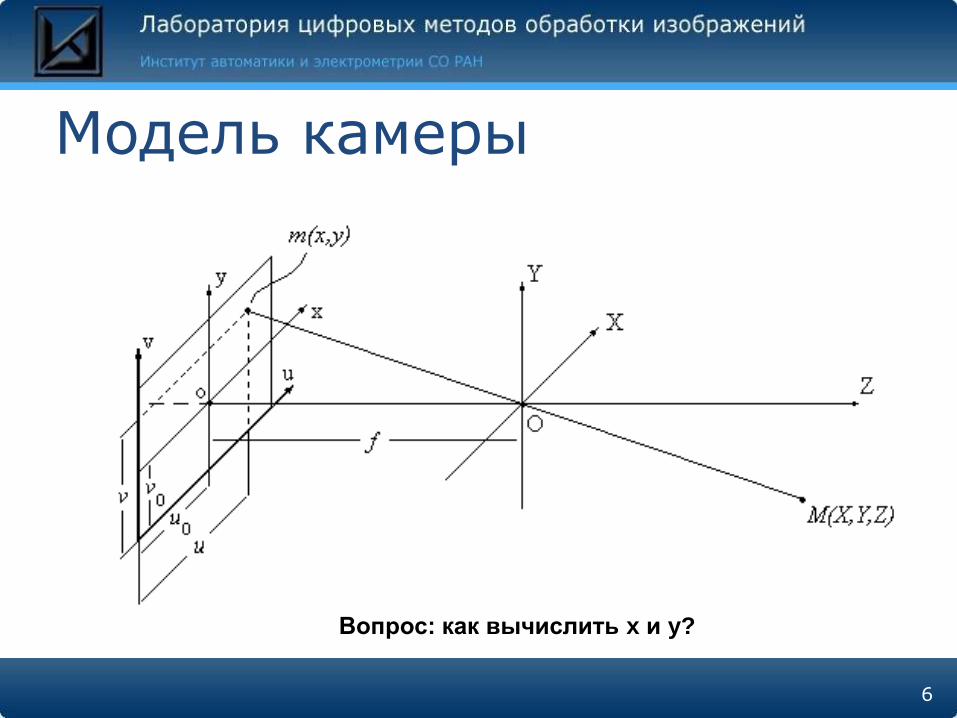
Модель камеры
6
Вопрос: как вычислить x и y?

Ответ
7
ZfXx /
ZfYy /
,
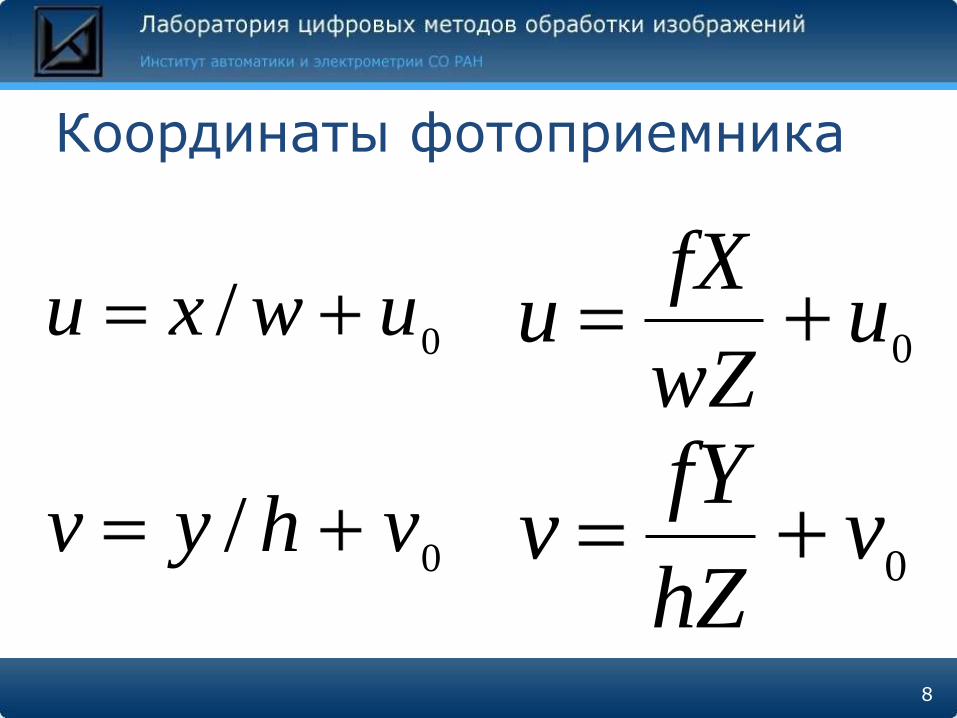
Координаты фотоприемника
8
0/ uwxu
0/ vhyv
0u
wZ
fXu
0v
hZ
fYv

Матрицы внутренних параметров камеры
9
AMvZ
100
/0
0/
0
0
vhf
uwf
A
Вопрос: Как вычислить матрицу внутренних параметров камеры?
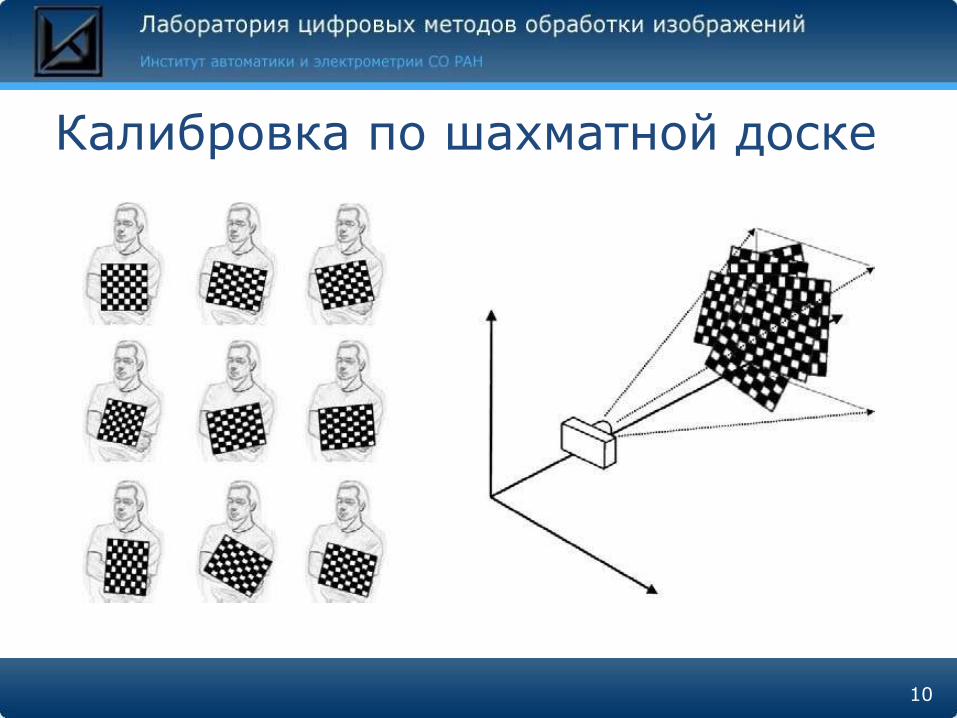
Калибровка по шахматной доске
10

Реализация калибровки в OpenCV
//Находим координаты углов
cv::findChessboardCorners(…);
//Уточняем положения углов
cv:: findCornerSubPix(…);
//Составляем список сопряженных точек
cv::calibrateCamera(model, detected_corners, imsize, cameraMatrix, distCoef, rvect, tvect, CV_CALIB_FIX_K3);
11
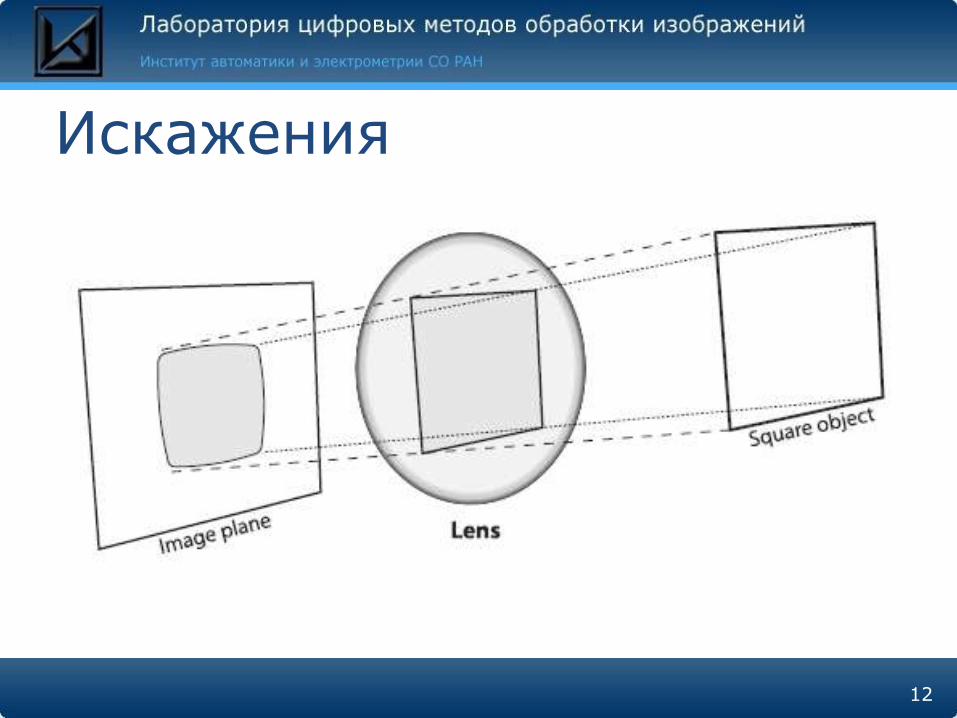
Искажения
12

Причины искажения
13

Модель искажения
14
cv::undistort(src,dst,cameraMat,distCoef)

Коррекция дисторсии
15

Связь между различными системами координат
16
tRMM
Поворот + перенос
Вопрос: размер матрицы
поворота
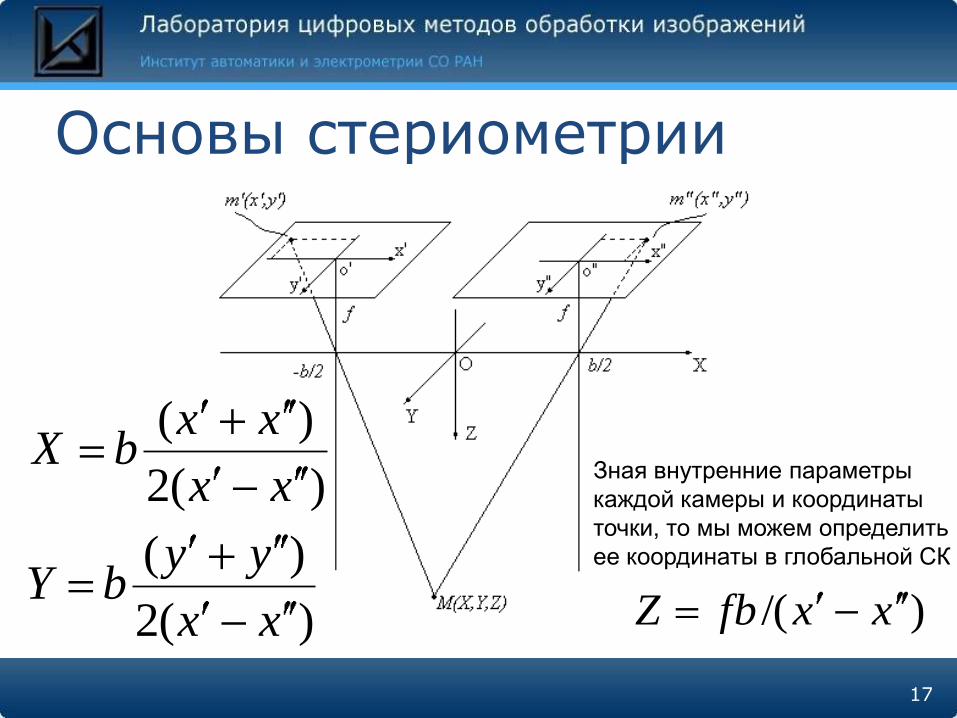
Основы стериометрии
17
)/( xxfbZ
)(2
)(
xx
xxbX
)(2
)(
xx
yybY
Зная внутренние параметры
каждой камеры и координаты
точки, то мы можем определить
ее координаты в глобальной СК
Стереокалибровка камер
• cv::stereoCalibrate(model,_left.getCorners(),_right.getCorners(),lcm, ldk,rcm,rdk,imsize,R,T,E,F…);
18
tRMM
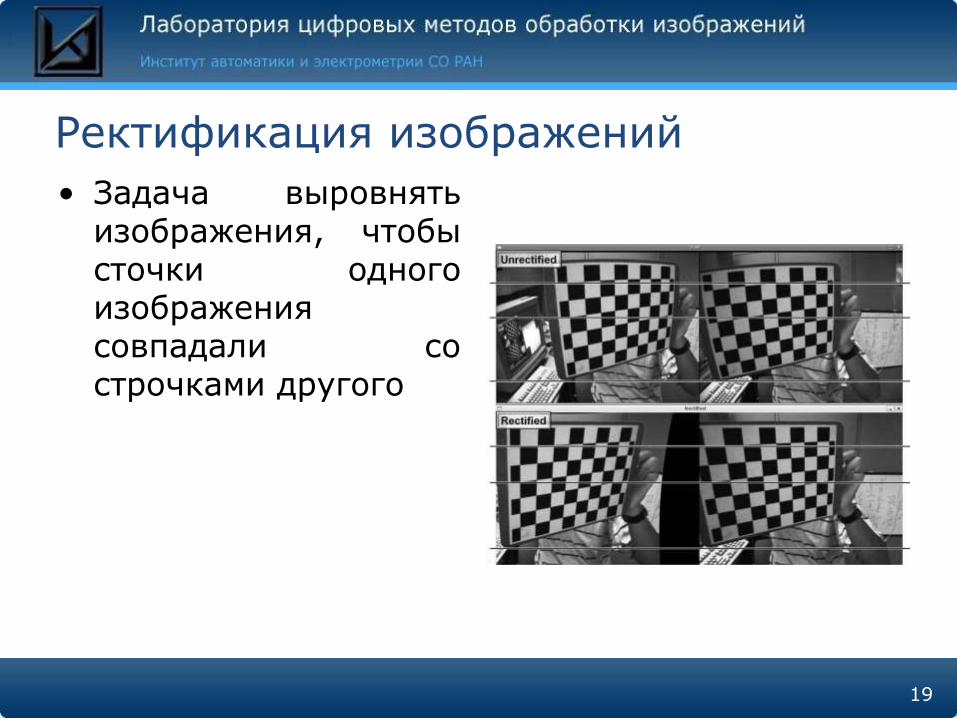
Ректификация изображений
• Задача выровнятьизображения, чтобысточки одногоизображениясовпадали сострочками другого
19
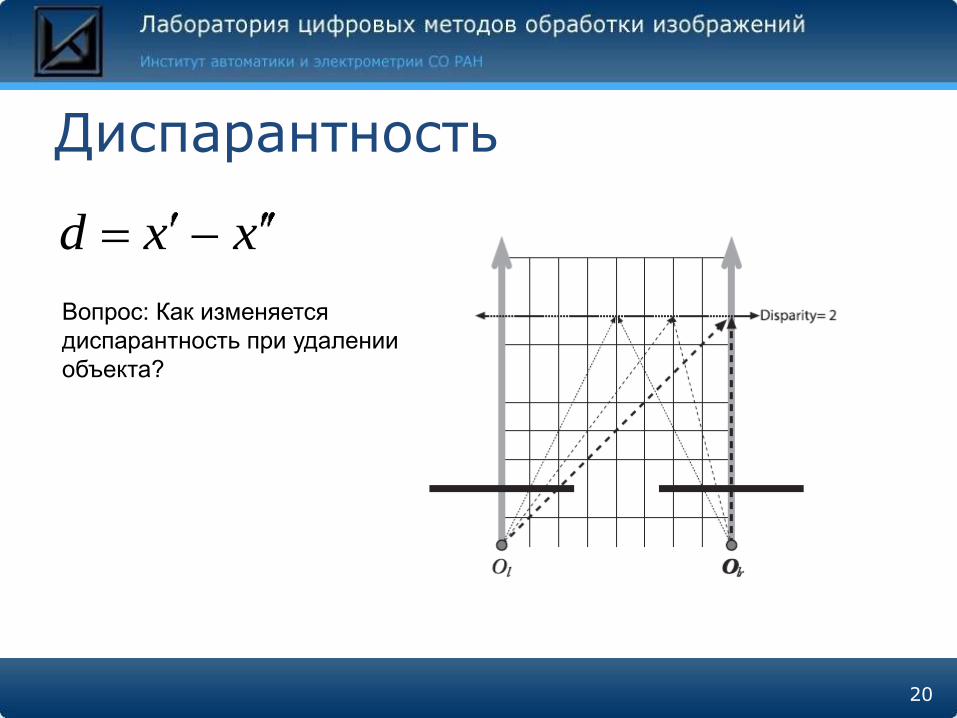
Диспарантность
20
xxd
Вопрос: Как изменяется
диспарантность при удалении
объекта?
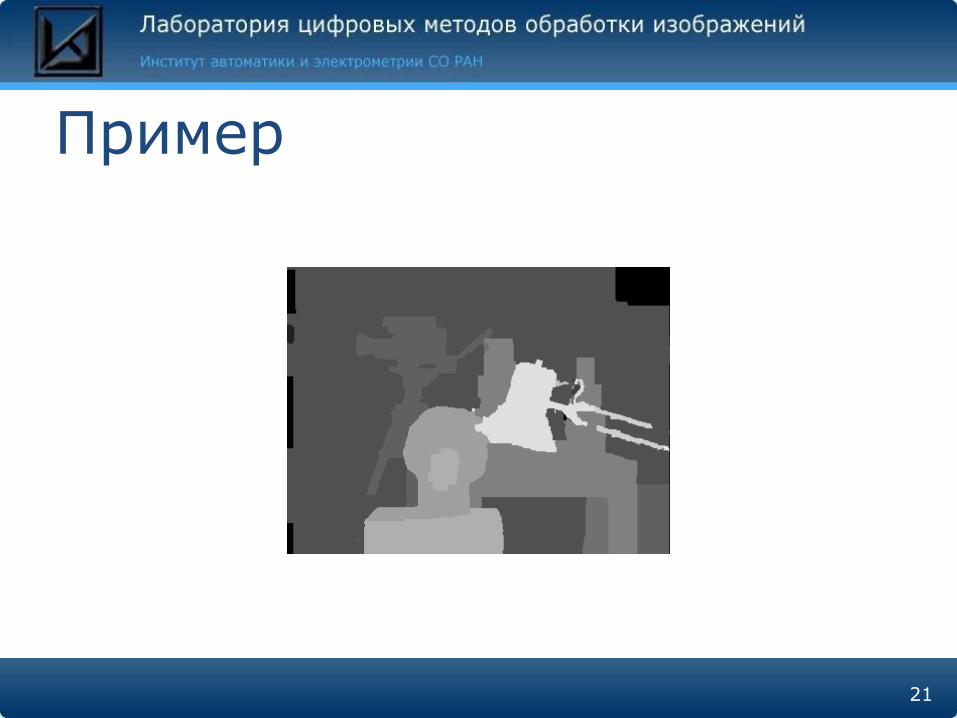
Пример
21

Диспарантность
22

Процесс стерео отождествления
23
Левая камера Правая камера
Исходное изображения
Коррекция дисторсии
Ректификация
Обрезание

Реконструкция рельефа
24

Реконструкция рельефа
25
Дополнительные возможности
• Поиск ориентации объекта сизвестными параметрами,относительно камеры
• cv::solvePnP(objectPoints, imagePoints,cameraMatrix, distCoeffs, rvec, tvec);
26
Вопросы
27

Kinect
28

Типы дальностных камер
• Time of flight (камеры времени пролета)
• Структурированное освещение
29
Time of Flight
• Pulsed light source with digital time counters
–до 7 км разрешение до 128x128
• RF-modulated light sources with phase detectors
–10-60м 176x144
• Range gated image
–1.5-2.5 метров 320x240
30

Устройство
31

Шаблон проектора
32

Процесс анализа
33

ИК проектор
34

OpenNI
35
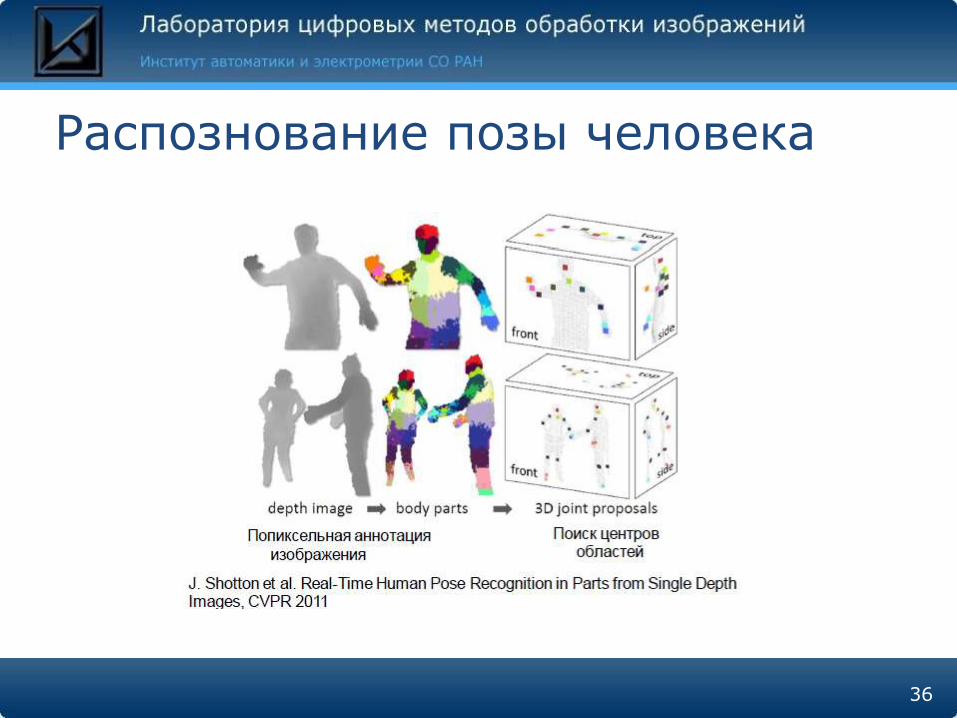
Распознование позы человека
36

Исходные данные
37

Классы
38

Признаки
39

Деревья решений
40

Пример дерева решений
41

Оценка качества разбиения
42

Эффект переобучения
43
Свойства• Плюсы
– Просто и наглядно
– Легко анализируемо
– Быстро работает
– Легко пременим к задачам с множеством классов
• Минусы
– Плохая аппроксимация сложных поверхностей
– Тебует алгоритмы контроля сложности
44

Комитетные методы. Лес решений
45

Пример
46
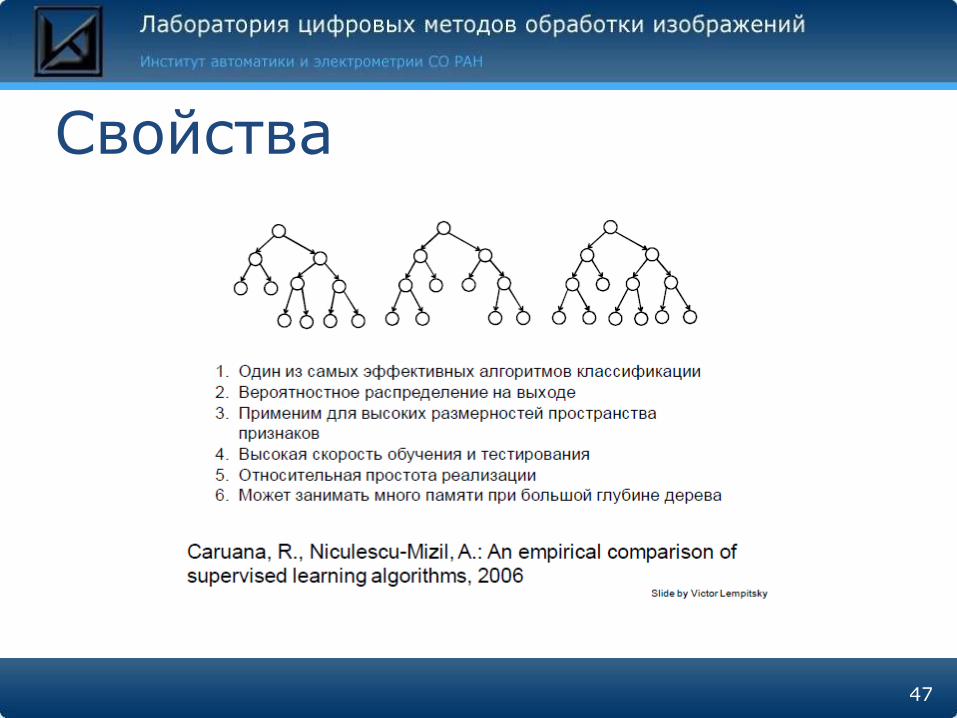
Свойства
47

Возвращаясь к классификации поз
48
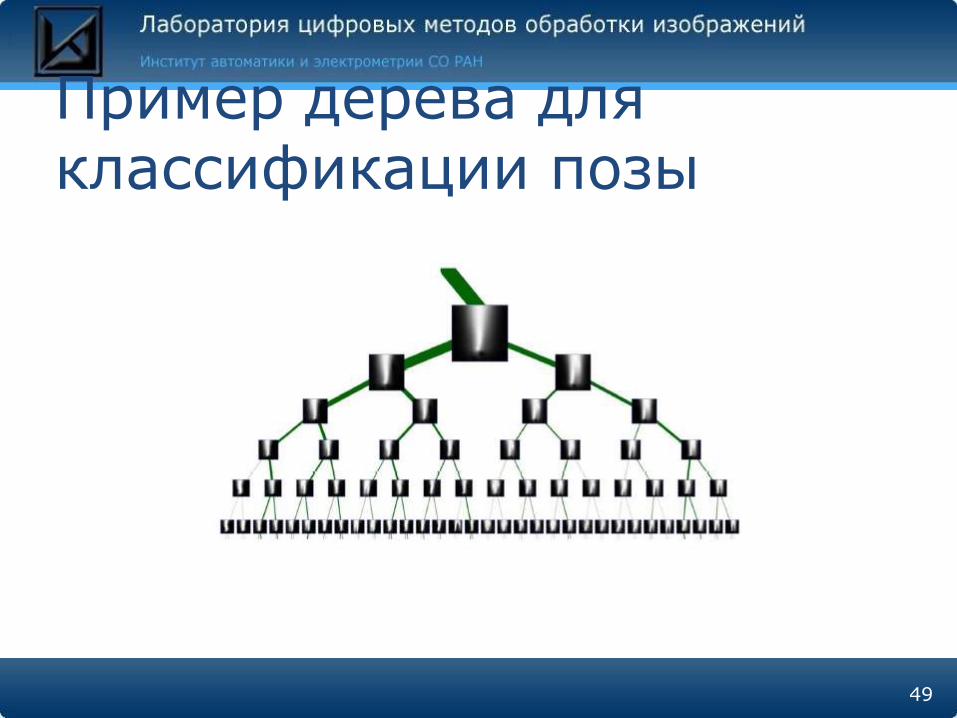
Пример дерева для классификации позы
49

Результаты
50

Другие применения MS Kinect
• Робототехника
• Психология
• Системы безопасности
51

Вопросы?
52






























