Embed Size (px)
Citation preview

Programação dinâmica em tempo real
para Processos de Decisão Markovianos
com Probabilidades Imprecisas
28 de novembro de 2014 - IME/USP
Daniel Baptista Dias
Orientadora: Karina Valdivia Delgado
1

Agenda
Introdução
Introdução
Motivação / Objetivos
Stochastic Shortest Path MDP (SSP MDP)
Definições formais
Soluções para SSP MDP
Stochastic Shortest Path MDP-IP (SSP MDP-IP)
Definições formais
Soluções síncronas para SSP MDP-IP
Algoritmos assíncronos para SSP MDP-IPs
Experimentos e Resultados
Conclusões
2

Introdução
Os Processos de Decisão Markovianos (MDPs) tem sido
usados como um arcabouço padrão para problemas de
planejamento probabilístico.
Eles modelam a interação de um agente em um ambiente,
que executam ações com efeitos probabilísticos que
podem levar o agente a diferentes estados.
3

Introdução
Exemplo: Navegação de robôs
𝟎, 𝟗
𝟎, 𝟏
4

Introdução
Entretanto, pode ser difícil obter as medidas precisas das
probabilidades de transição
𝒑𝟏
𝒑𝟐 Em que: 𝟎, 𝟕 ≤ 𝒑𝟏 ≤ 𝟎, 𝟗
𝟎, 𝟏 ≤ 𝒑𝟐 ≤ 𝟎, 𝟑 5

Introdução
Processos de Decisão Markovianos com Probabilidades Imprecisas (MDP-IPs) As probabilidades imprecisas são dadas através de parâmetros nas
transições de estados restritas por um conjunto de inequações
Geralmente modelados de duas maneiras: MDP-IP enumerativo: estados com informações autocontidas
MDP-IP fatorado: estados representados por variáveis de estado
Solução para MDP-IPs fatorados: SPUDD-IP Algoritmo de programação dinâmica síncrona fatorada
Supera o algoritmo clássico enumerativo Iteração de Valor em duas ordens de magnitude
6

Introdução
Stochastic Shortest Path MDPs (SSP MDPs)
Apresentados por Bertsekas e Tsitsiklis (1991)
Considera um estado inicial e um conjunto de estados meta
Soluções comuns para SSP MDPs
Algoritmos de programação dinâmica assíncrona
Exploram a informação de um estado inicial do problema
Obtêm uma política ótima parcial
Algoritmos conhecidos: RTDP e SSiPP
Short Sighted SSP MDPs (Trevizan, 2013)
São problemas menores criados a partir de SSP MDP
7

Introdução
estados
iniciais
estados
meta
Estados estados alcançáveis
Exemplo de atualizações assíncronas no espaço de estados
8

Motivação
Nunca foram propostos algoritmos de programação dinâmica
assíncrona para SSP MDP-IPs com restrições gerais
Deve-se adaptar algumas características do (L)RTDP e (L)SSiPP
para se criar estes algoritmos para SSP MDP-IPs
As principais são:
Como garantir a convergência de soluções de programação dinâmica
assíncrona para SSP MDP-IPs?
Como amostrar o próximo estado no trial dadas as probabilidades
imprecisas?
Como criar os Short-Sighted SSP MDP-IPs a partir de SSP MDP-IPs?
9

Objetivos
O objetivo deste trabalho de mestrado é:
Propor novos algoritmos assíncronos para resolver SSP MDP-IPs
enumerativos e fatorados, estendendo os algoritmos (L)RTDP e
(L)SSiPP para lidar com um conjunto de probabilidades no lugar
de probabilidades precisas.
10

Agenda
Introdução
Introdução
Motivação / Objetivos
Stochastic Shortest Path MDP (SSP MDP)
Definições formais
Soluções para SSP MDP
Stochastic Shortest Path MDP-IP (SSP MDP-IP)
Definições formais
Soluções síncronas para SSP MDP-IP
Algoritmos assíncronos para SSP MDP-IPs
Experimentos e Resultados
Conclusões
11

SSP MDPs – Definição formal
Um SSP MDP (Bertsekas e Tsitsiklis, 1991), é uma tupla S, 𝐴, 𝐶, 𝑃, 𝐺, 𝑠0 em que:
𝑆 é um conjunto finito de estados
𝐴 é um conjunto finito de ações
𝐶 ∶ 𝑆 × 𝐴 → ℛ+ é uma função de custo
𝑃(𝑠′|𝑠, 𝑎) define a probabilidade de transição de se alcançar um estado 𝑠′ ∈ 𝑆 a partir de um estado 𝑠 ∈ 𝑆, executando a ação 𝑎 ∈ 𝐴
𝐺 ⊆ 𝑆 é um conjunto de estados meta, definidos como estados de absorção. Para cada 𝑠 ∈ 𝐺, 𝑃(𝑠|𝑠, 𝑎) = 1 e 𝐶(𝑠, 𝑎) = 0 para todo 𝑎 ∈ 𝐴
𝑠0 ∈ 𝑆 é o estado inicial
12

SSP MDPs – Definição formal
Este modelo assume dois pressupostos (Bertsekas e
Tsitsiklis, 1991):
Política apropriada: Cada 𝑠 ∈ 𝑆 deve ter ao menos uma
política apropriada, i.e., uma política que garante que um estado
meta é alcançado com probabilidade 1.
Política imprópria: Cada política imprópria deve ter custo
∞ em todos os estados que não podem alcançar a meta com
probabilidade 1.
13

Short-Sighted SSP MDPs – Definição formal
Short-Sighted SSP MDP: um subproblema originado de um SSP
MDP com estados alcançados por 𝑡 ações aplicadas a partir de
𝑠.
Medida de distância entre os estados é:
𝛿 𝑠, 𝑠′ = 0 , 𝑠𝑒 𝑠 = 𝑠′
1 + min𝑎∈𝐴
min𝑠 :𝑃 𝑠 𝑠,𝑎 >0
𝛿 𝑠 , 𝑠′ , 𝑐𝑎𝑠𝑜 𝑐𝑜𝑛𝑡𝑟á𝑟𝑖𝑜
14

Short-Sighted SSP MDPs – Definição formal
Short-Sighted SSP MDP: um subproblema originado de um SSP
MDP com estados alcançados por 𝑡 ações aplicadas a partir de
𝑠.
Medida de distância entre os estados é:
𝛿 𝑠, 𝑠′ = 0 , 𝑠𝑒 𝑠 = 𝑠′
1 + min𝑎∈𝐴
min𝑠 :𝑃 𝑠 𝑠,𝑎 >0
𝛿 𝑠 , 𝑠′ , 𝑐𝑎𝑠𝑜 𝑐𝑜𝑛𝑡𝑟á𝑟𝑖𝑜
Exemplo de um Short-Sighted SSP MDP enraizado em 𝑠0 com 𝑡 = 2
15

Short-Sighted SSP MDPs – Definição formal
Um Short-Sighted SSP MDP enraizado em 𝑠 ∈ 𝑆 e com
profundidade 𝑡 ∈ 𝒩+é uma tupla 𝑆𝑠,𝑡 , 𝐴, 𝐶𝑠,𝑡 , 𝑃, 𝐺𝑠,𝑡 , 𝑠 , onde:
𝐴 e 𝑃 são definidos como em SSP MDPs;
𝑆𝑠,𝑡 = {𝑠′ ∈ 𝑆|𝛿 𝑠, 𝑠′ ≤ 𝑡}
𝐺𝑠,𝑡 = 𝑠′ ∈ 𝑆 𝛿 𝑠, 𝑠′ = 𝑡 ∪ 𝐺 ∩ 𝑆𝑠,𝑡
𝐶𝑠,𝑡 𝑠′, 𝑎, 𝑠′′ = 𝐶 𝑠′, 𝑎, 𝑠′′ +𝐻(𝑠′′)
𝐶 𝑠′, 𝑎, 𝑠′′𝑠𝑒 𝑠′′∈𝐺𝑠,𝑡\G
𝑐𝑎𝑠𝑜 𝑐𝑜𝑛𝑡𝑟á𝑟𝑖𝑜
Onde 𝐻(𝑠) é uma heurística definida para o estado 𝑠
Neste trabalho o custo será considerado dependente apenas
de 𝑠 e 𝑎, i.e., 𝐶(𝑠′, 𝑎) e 𝐻 𝑠′′ = 0
16

SSP MDPs – IV
Para resolver um SSP MDP é usado equação de Bellman:
𝑉∗(𝑠) = 𝑚𝑖𝑛𝑎∈𝐴 𝐶 𝑠, 𝑎 + 𝑃 𝑠′ 𝑠, 𝑎 𝑉∗(𝑠′)
𝑠′∈𝑆
Iteração de Valor: algoritmo de programação dinâmica
síncrona
𝑉𝑡+1 𝑠 = 𝐵𝑉𝑡 𝑠 = min𝑎∈𝐴
𝑄𝑡+1(𝑠, 𝑎)
𝑄𝑡+1(𝑠, 𝑎) = 𝐶(𝑠, 𝑎) + 𝑃 𝑠′ 𝑠, 𝑎 𝑉𝑡(𝑠′)
𝑠′∈ 𝑆
17

SSP MDPs – RTDP
Programação dinâmica em tempo real, proposto por
Barto et al (1995)
Solução de programação dinâmica assíncrona:
Simula uma política gulosa a partir do estado inicial (trial)
A cada visita de estado, seu valor é atualizado usando a
equação de Bellman e uma simulação da execução da melhor
ação é feita a fim de visitar outro estado
18

SSP MDPs – RTDP
O trial é interrompido quando o algoritmo encontra um
determinado estado meta
A convergência do algoritmo pode demorar
Estados visitados com menos frequência sofrem poucas atualizações
19

SSP MDPs – LRTDP
Extensão do RTDP, proposta por Bonet e Geffner (2003)
Melhora a convergência através da rotulação dos estados que convergiram
Características:
Os trials são interrompidos quando um estado rotulado é encontrado
Ao final de um trial, os estados visitados são atualizados se necessário e a convergência dos mesmos é verificada (através do procedimento CheckSolved)
20

SSP MDPs – SSiPP
SSiPP (Short-Sighted Probabilistic Planner)
Realiza a atualizações assíncronas a partir do estado inicial de
um Short-Sighted SSP MDPs.
21

Agenda
Introdução
Introdução
Motivação / Objetivos
Stochastic Shortest Path MDP (SSP MDP)
Definições formais
Soluções para SSP MDP
Stochastic Shortest Path MDP-IP (SSP MDP-IP)
Definições formais
Soluções síncronas para SSP MDP-IP
Algoritmos assíncronos para SSP MDP-IPs
Experimentos e Resultados
Conclusões
22

SSP MDP-IPs – Definição formal
Definido por uma tupla 𝑆, 𝐴, 𝐶,𝒦, 𝐺, 𝑠0 onde:
𝑆, 𝐴, 𝐶, 𝐺 e 𝑠0 são definidos como qualquer SSP MDP; e
𝒦 é um conjunto de conjuntos credais de transição, onde um
conjunto credal de transição 𝐾 é definido para cada par de
estado-ação, i.e., 𝒦 ≤ 𝒦 𝑚𝑎𝑥= S × A .
São assumidos os pressupostos de políticas apropriadas e
impróprias.
23

SSP MDP-IPs – Definição formal
24

SSP MDP-IPs – Conjunto credal
25

SSP MDP-IPs – Critérios de escolha
Abordagem baseada em jogos
Utilizada para definir o valor de uma política
Assume-se que existe outro agente no sistema, a Natureza
Ela escolherá uma distribuição de probabilidades em um
conjunto credal assumindo algum critério
Critério minimax
O agente seleciona as ações que minimizam o custo futuro
A Natureza escolhe a probabilidade que maximiza o custo
esperado do agente (i.e., a Natureza é adversária)
26

SSP MDP-IPs – Critérios de escolha
Assim, a equação de Bellman para SSP MDP-IPs é:
𝑉∗ 𝑠 = min 𝑎∈ 𝐴
max𝑃∈ 𝐾
𝐶(𝑠, 𝑎) + 𝑃 𝑠′ 𝑠, 𝑎 𝑉∗(𝑠′)
𝑠′∈ 𝑆
Existe de valor de equilíbrio para um SSP game alternado
(Patek e Bertsekas, 1999)
Este valor pode ser calculado para SSP MDP-IPs com a
equação de Bellman
27

SSP MDP-IPs – Iteração de Valor
Iteração de Valor para SSP MDP-IPs:
𝑉𝑡+1(𝑠) = (𝑇𝑉𝑡)(𝑠) = 𝑚𝑖𝑛𝑎∈𝐴 𝑄𝑡+1(𝑠, 𝑎)
𝑄𝑡+1 𝑠, 𝑎 = 𝐶 𝑠, 𝑎 + max𝑃∈ 𝐾
𝑃(𝑠′|𝑠, 𝑎)
𝑠′∈ S
𝑉𝑡(𝑠′)
28

Short-Sighted SSP MDP-IPs
Um Short-Sighted SSP MDP-IP tem as mesmas definições
que os Short-Sighted SSP MDP, com uma tupla
𝑆𝑠,𝑡 , 𝐴, 𝐶𝑠,𝑡 , 𝑃, 𝐺𝑠,𝑡 , 𝑠 .
Porém 𝑆𝑠,𝑡 e 𝐺𝑠,𝑡 ao invés de ser definido por 𝛿 𝑠, 𝑠′ ,
será definido pela função 𝛿𝐼𝑃 𝑠, 𝑠′ :
𝛿𝐼𝑃 𝑠, 𝑠′ = 0 , 𝑠𝑒 𝑠 = 𝑠′
1 + min𝑎∈𝐴
min𝑠 :𝑃 𝑠 𝑠,𝑎 >0∀𝑃∈𝐾(⋅|𝑠,𝑎)
𝛿𝐼𝑃 𝑠 , 𝑠′ , 𝑐𝑎𝑠𝑜 𝑐𝑜𝑛𝑡𝑟á𝑟𝑖𝑜
29

SSP MDP-IPs fatorado – definição formal
Um SSP MDP-IP fatorado é um SSP MDP-IP em que:
Os estados 𝑥 são especificados como uma atribuição conjunta
para um vetor 𝑋 de 𝑛 variáveis de estado (𝑋1, … , 𝑋𝑛)
As redes credais dinâmicas (Cozman, 2000, 2005 , Delgado et al,
2011) são utilizadas para representar a função de transição
Os PADDs (Delgado et al, 2011) podem ser usados para
representar a função de transição
30

SSP MDP-IPs fatorado – SPUDD-IP
O SPUDD-IP (Delgado et al, 2011) atualiza os estados
com as seguintes equações:
𝑉𝐷𝐷𝑡+1 𝑋 = 𝑚𝑖𝑛𝑎∈𝐴 𝑄𝐷𝐷
𝑡+1(𝑋 , 𝑎)
𝑄𝐷𝐷𝑡+1 𝑋 , 𝑎 = 𝐶𝐷𝐷 𝑋 , 𝑎 ⊕
max𝑝 ∈𝐾𝑎
⊗𝑖=1𝑛 (𝑃𝐷𝐷(𝑋𝑖
′|𝑝𝑎𝑎 𝑋1′ , 𝑎) ⊗ 𝑉𝐷𝐷
𝑡 (𝑋 ′)
𝑥1′ ,⋅,𝑥𝑛
′
31

Conversão de SSP MDP-IP fatorados
Um SSP MDP-IP enumerativo pode ser criado através de
um fatorado pelo cálculo da probabilidades de transição
conjunta:
𝑃 𝑥 ′ 𝑥 , 𝑎 = 𝑃(𝑥𝑖′|𝑝𝑎𝑎 𝑋𝑖
′ , 𝑎)
𝑛
𝑖=1
As probabilidades de transição deste novo SSP MDP-IP
enumerativo não serão mais lineares, pois podem
envolver multiplicação de parâmetros
32

Agenda
Introdução
Introdução
Motivação / Objetivos
Stochastic Shortest Path MDP (SSP MDP)
Definições formais
Soluções para SSP MDP
Stochastic Shortest Path MDP-IP (SSP MDP-IP)
Definições formais
Soluções síncronas para SSP MDP-IP
Algoritmos assíncronos para SSP MDP-IPs
Experimentos e Resultados
Conclusões
33

Algoritmos assíncronos para SSP MDP-IPs
Neste trabalho foram desenvolvidos os seguintes
algoritmos para SSP MDP-IPs:
RTDP-IP
factRTDP-IP
SSiPP-IP
LRTDP-IP
factLRTDP-IP
LSSiPP-IP
34

RTDP-IP
Utiliza as mesmas estratégias do algoritmo RTDP, com as
seguintes alterações:
O Bellman backup para o estado atual visitado é
executado considerando o critério minimax
A escolha do próximo estado é feita considerando as
probabilidades imprecisas, isto é, dado uma ação gulosa,
primeiro os valores para cada 𝑝𝑖 são escolhidos, sujeitos ao
conjunto de restrições 𝜑, para depois realizar a escolha real
35

RTDP-IP – Bellman Backup
36

RTDP-IP
Utiliza as mesmas estratégias do algoritmo para SSP
MDPs, com as seguintes alterações:
O Bellman backup para o estado atual visitado é executado
considerando o critério minimax
A escolha do próximo estado é feita considerando as
probabilidades imprecisas, isto é, dado uma ação
gulosa, primeiro os valores para cada 𝒑𝒊 são escolhidos,
sujeitos ao conjunto de restrições 𝝋 , para depois
realizar a escolha real
37

RTDP-IP – Escolha do próximo estado
38

RTDP-IP – Escolha do próximo estado
A escolha do valor das probabilidades imprecisas pode
ser feita de três formas:
Utilizando o mesmo valor computado pelo Bellman update
(método minimax_parameter_choice)
Calculando um valor aleatório válido a cada visita de um
estado durante o trial (método rand_parameter_choice)
Calculando um valor válido pré determinado apenas uma vez
no início do algoritmo (método predefined_parameter_choice)
39
RTDP-IP – Escolha do próximo estado
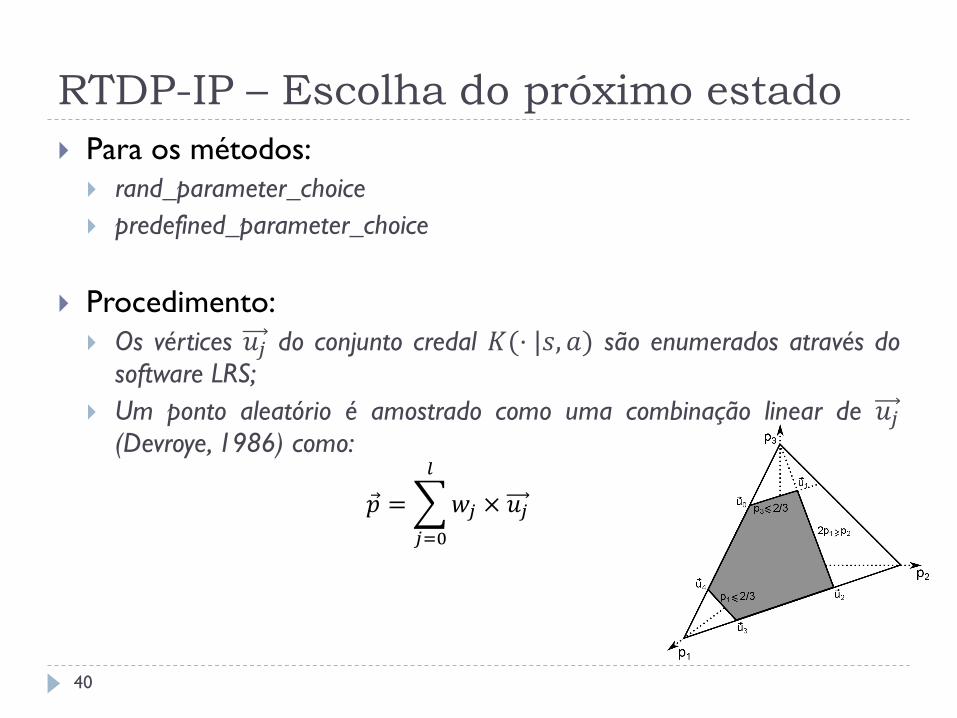
Para os métodos:
rand_parameter_choice
predefined_parameter_choice
Procedimento:
Os vértices 𝑢𝑗 do conjunto credal 𝐾(⋅ |𝑠, 𝑎) são enumerados através do
software LRS;
Um ponto aleatório é amostrado como uma combinação linear de 𝑢𝑗 (Devroye, 1986) como:
𝑝 = 𝑤𝑗 × 𝑢𝑗
𝑙
𝑗=0
40

RTDP-IP – Prova de convergência
Considera a prova de Buffet e Aberdeen (2005)
Que por sua vez estende a prova de Barto et al. (1999)
Os seguintes pontos são provados para garantir a convergência do RTDP-IP:
O operador 𝑇 (Bellman Backup) é uma contração (Patek e Bertsekas, 1999)
A admissibilidade da função valor é mantida durante a execução do algoritmo
Ao realizar repetidos trials nos estados relevantes utilizando qualquer método de amostragem do próximo estado, o RTDP-IP converge.
41

LRTDP-IP
Semelhante ao RTDP-IP, com as seguintes diferenças:
O critério de parada do algoritmo e parada do trial são
idênticos ao LRTDP
No fim de cada trial é verificado se o estado pode ser rotulado
como resolvido através do método CheckSolved-IP
Ao se buscar os estados sucessores no CheckSolved-IP,
considera-se todas as transições parametrizadas diferentes de
0 (zero)
42

factRTDP-IP e factLRTDP-IP
Baseado no algoritmo factRTDP (Holguin, 2013), que atualiza um estado por vez
Implementa o Bellman Update e a seleção do próximo estado de forma fatorada
𝑉𝐷𝐷𝑡+1 𝑥 = 𝑚𝑖𝑛𝑎∈𝐴 𝑄𝐷𝐷
𝑡+1(𝑥 , 𝑎)
𝑄𝐷𝐷𝑡+1 𝑥 , 𝑎 = 𝐸𝑣𝑎𝑙𝑃𝐴𝐷𝐷(𝐶𝐷𝐷 𝑋, 𝑎 , 𝑥 ) ⊕
max𝑝 ∈𝐾𝑎
⊗𝑖=1𝑛 (𝑝𝐸𝑣𝑎𝑙𝑃𝐴𝐷𝐷(𝑃𝐷𝐷(𝑋𝑖
′|𝑝𝑎𝑎 𝑋1′ , 𝑎), 𝑥 ) ⊗ 𝑉𝐷𝐷
𝑡 (𝑋′)
𝑥1′ ,⋅,𝑥𝑛
′
O factLRTDP-IP também realiza as operações de forma fatorada, porém com chamadas ao método factCheckSolved-IP
43
SSiPP-IP e LSSiPP-IP
Modifica o SSiPP nos seguintes pontos:
Ao segmentar um SSP MDP-IP ele gera um Short-Sighted SSP
MDP-IP e chama um solver para SSP MDP-IPs para resolvê-lo
Ao simular a política devolvida pelo solver, ele leva em
consideração os métodos de amostragem de próximo estado
apresentados no RTDP-IP
O LSSiPP-IP considera os mesmos pontos e também
utiliza o método CheckSolved-IP para rotular os estados
resolvidos, considerando as probabilidades imprecisas.
44

Agenda
Introdução
Introdução
Motivação / Objetivos
Stochastic Shortest Path MDP (SSP MDP)
Definições formais
Soluções para SSP MDP
Stochastic Shortest Path MDP-IP (SSP MDP-IP)
Definições formais
Soluções síncronas para SSP MDP-IP
Algoritmos assíncronos para SSP MDP-IPs
Experimentos e Resultados
Conclusões
45

Experimentos realizados
Dois experimentos foram realizados:
Um comparando os algoritmos assíncronos RTDP-IP, LRTDP-IP, factRTDP-IP e factLRTDP-IP com o algoritmo síncrono estado-da-arte SPUDD-IP
Outro comparando os algoritmos assíncronos LRTDP-IP e LSSiPP-IP
Todos os algoritmos foram comparados em relação a:
Tempo de Convergência
Taxa de Convergência
Chamadas ao Solver
46

Experimentos realizados
O primeiro experimento foi realizado considerando os domínios:
Navigation (IPPC-2011)
Relaxed Triangle Tireworld (IPPC-2005)
SysAdmin, topologia Uniring (Guestrin et al, 2003)
Todos os domínios foram adaptados para SSP MDP-IPs, a partir do RDDL e do PPDDL.
Em domínios com deadends, todos os algoritmos tem tratamento para detectá-los.
47

Experimento 1 – Tempo de convergência
48

Experimento 1 – Tempo de convergência
49

Experimento 1 – Tempo de convergência
50

Experimento 1 – Taxa de convergência
51

Experimento 1 – Taxa de convergência
52

Experimento 1 – Chamadas ao Solver
53

Experimentos realizados
O segundo experimento foi realizado considerando os
domínios:
Navigation (IPPC-2011)
Relaxed Triangle Tireworld (IPPC-2005)
NoRelaxed Triangle Tireworld (IPPC-2005)
A execução do LSSiPP-IP é feita com 𝑡 = 1, 3, 5 .
Os algoritmos utilizam o minimax_parameter_choice.
A detecção de deadends é realizada da mesma forma que
no experimento anterior.
54

Experimento 2 – Tempo de convergência
55

Experimento 2 – Convergência x Solver
56

Agenda
Introdução
Introdução
Motivação / Objetivos
Stochastic Shortest Path MDP (SSP MDP)
Definições formais
Soluções para SSP MDP
Stochastic Shortest Path MDP-IP (SSP MDP-IP)
Definições formais
Soluções síncronas para SSP MDP-IP
Algoritmos assíncronos para SSP MDP-IPs
Experimentos e Resultados
Conclusões
57

Contribuições
Algoritmos de programação dinâmica assíncrona
enumerativos e fatorados para SSP MDP-IPs
Criação de métodos de amostragem para o próximo
estado
Algoritmos de programação dinâmica assíncrona para
Short-Sighted SSP MDP-IP
58

Conclusões
O (L)RTDP-IP e o fact(L)RTDP-IP se mostraram melhor que o SPUDD-IP em até três ordens, resolvendo problemas com até 120 variáveis
Esta melhoria não se aplica em domínios densos
Os diferentes métodos de amostragem não interferem no tempo de execução dos algoritmos
O LSSiPP-IP não consegue ser melhor que o LRTDP-IP, não reproduzindo o comportamento observado em SSP MDPs
59

Trabalhos futuros
Adaptação dos algoritmos para considerar deadends genéricos (Kolobov et al, 2010)
Propor novas funções valor admissíveis para Short-Sighted SSP MDP-IPs
Adaptar outros algoritmos assíncronos de SSP MDPs para os SSP MDP-IPs
Investigar abordagens Bayesianas para SSP MDP-IPs
60

Bibliografia Barto et al.(1995) Andrew G. Barto, Steven J. Bradtke e Satinder P.
Singh. Learning to act using real-time dynamic programming. Artificial Intelligence, 72:81 - 138. ISSN 0004-3702.
Bertsekas e Tsitsiklis(1991) Dimitri P. Bertsekas e John N. Tsitsiklis. An analysis of stochastic shortest path problems. Math. Oper. Res., 16(3):580 - 595. ISSN 0364-765X.
Bonet e Geffner(2003) B. Bonet e H. Geffner. Labeled RTDP: Improving the convergence of real-time dynamic programming. Proceedings of 2003 International Conference on Automated Planning and Scheduling, páginas 12-21.
Buffet e Aberdeen(2005) Olivier Buffet e Douglas Aberdeen. Robust planning with LRTDP. Em Proceedings of 2005 International Joint Conference on Artificial Intelligence, páginas 1214-1219.
61

Bibliografia
Cozman(2000) F. G. Cozman. Credal networks. Artificial Intelligence, 120:199-233.
Cozman(2005) F. G. Cozman. Graphical models for imprecise probabilities. International Journal of Approximate Reasoning, 39(2-3):167-184.
Delgado et al.(2011) Karina Valdivia Delgado, Scott Sanner e Leliane Nunes de Barros. Efficient solutions to factored MDPs with imprecise transition probabilities. Artificial Intelligence, 175:1498 - 1527. ISSN 0004-3702
Devroye(1986) Luc Devroye. Non-Uniform Random Variate Generation. Springer-Verlag.
62

Bibliografia
Guestrin et al.(2003) Carlos Guestrin, Daphne Koller, Ronald Parr e Shobha Venkataraman. Efficient solution algorithms for factored MDPs. Journal of Artificial Intelligence Research, 19:399-468.
Holguin(2013) Mijail Gamarra Holguin. Planejamento probabilístico usando programação dinâmica assíncrona e fatorada. Dissertação de Mestrado, IME-USP.
Patek e Bertsekas(1999) Stephen D Patek e Dimitri P Bertsekas. Stochastic shortest path games. SIAM Journal on Control and Optimization, 37(3):804-824.
Trevizan(2013) Felipe W Trevizan. Short-sighted Probabilistic Planning. Tese de Doutorado, Carnegie Melon.
63

Obrigado !
64





























