Embed Size (px)
Citation preview

UnaUna tecnolog tecnología utilizada para ía utilizada para ver y analizarver y analizar datos desde datos desde una perspectiva geográficauna perspectiva geográfica. . Esta tecnología es una de las Esta tecnología es una de las piezas que componen el piezas que componen el marco para un Sistema de marco para un Sistema de Información Organizacional.Información Organizacional.
¿Qué es un Sistema de Información Geográfico?
¿Qué es un Sistema de Información Geográfico?

El origen de nuestra información es la adecuada?
1:100.0001:100.000
1:50.0001:50.000
1:25.0001:25.000
1:10.0001:10.0001:5.0001:5.000

Ejemplo Modelo Cartográfico

• PSAD56 (Datum con origen en La Canoa, Venezuela).
– a = 6378388– 1/f = 297
• SAD 69 (Datum con origen en el Chua, Brasil).– a = 6378160.0 – 1/f = 298.25
• WGS-84 (Datum con origen en el Centro de la Tierra).
– a = 6378137.0 – 1/f = 298.257223563
Problemática Nacional?

Qué Proyección utilizamos?
• Un número variado de proyecciones son utilizadas:
• Universal Transverse Mercator.
• Transverse Mercator.
• Lambert Conformal Conical.
• La Transversal de Mercator o Universal Transversal de Mercator son usadas para áreas extensas en dirección Norte-Sur.
• La proyección de Lambert es usada para áreas con dirección Este-Oeste.

Problemática Nacional
POSIBLES CONSECUENCIAS DE USARDIFERENTES SISTEMAS DE REFERENCIA

Parámetros de Transformación
SAD69
X= 1755453,33
Y= -5028713,59
Z= -3496988,62
WGS84
X= 1755381,82
Y= -5028696,63
Z= -3497007,11
- DX = 71,51
DY = -19,96
DZ = 18,49
=

SAD69 - WGS84Dx = -68.58910
Dy = 5.20320
Dz = -31.56550
Rx = -0.02694
Ry = 0.02460
Rz = 0.02547
FE = 0.03680
PARAMETROS DE TRANSFORMACION

PSAD56 - WGS84Dx = -340.6199
Dy = 374.0334
Dz = -305.7950
Rx = -0.02695
Ry = 0.02461
Rz = 0.02545
FE = 0.03690
PARAMETROS DE TRANSFORMACION

Compatibilizar los sistemas geodésicos utilizados por los países de América del Sur,promoviendo la definición y establecimiento de un referencial único con precisión compatible con la actual tecnología de posicionamiento.

Layer o Capas atributadasLayer o Capas atributadas

Almacenando Datos
Realidad(Una carretera)
X,Y
Filas
Columnas
X,Y
X,Y X,Y X,Y
- Formatos Vectoriales - Representación discreta de la realidad
- Formatos Raster - Uso de celdas para modelar la realidad

Imágenes Satelitales

Ejemplos IKONOS
Quick Bird

Qué precisión requiero para actualizar mi cartografía?

Captura de Datos
480585.5, 3769234.6483194.1, 3768432.3485285.8, 3768391.2484327.4, 3768565.9483874.7, 3769823.0
480585.5, 3769234.6483194.1, 3768432.3485285.8, 3768391.2484327.4, 3768565.9483874.7, 3769823.0
Mapas ImpresosMapas Impresos
GPSGPS
DatosSIGCoordenadasCoordenadas
Datos DigitalesDatos Digitales
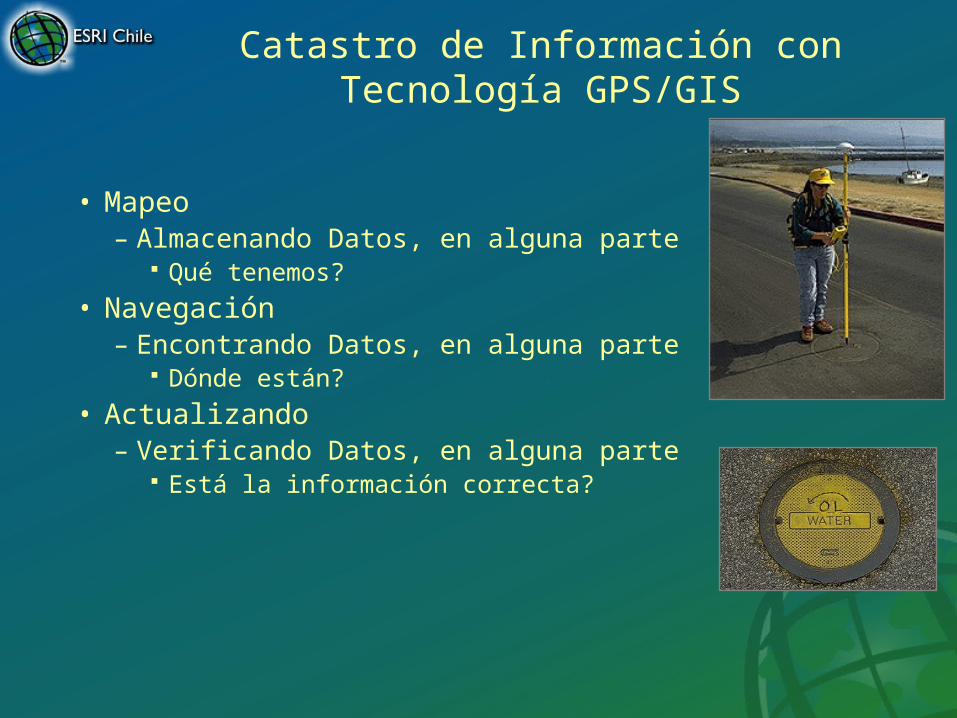
Catastro de Información con Tecnología GPS/GIS
• Mapeo– Almacenando Datos, en alguna parte
Qué tenemos?• Navegación
– Encontrando Datos, en alguna parte Dónde están?
• Actualizando– Verificando Datos, en alguna parte
Está la información correcta?

Global Positioning System
Su posición es:33o 23.323’ S69o 02.162’ W

Trimble Navigation Limited, Sunnyvale, Ca-USA
En Chile es…. ESRI CHILE S.A.En Chile es…. ESRI CHILE S.A.

Corrección Diferencial
Si colecta datos en una ubicación, estos no están libres de errores.
Cada uno de estos errores son asociados con el tiempo GPS
BASE
11:00.10
11:00:05
11:00.00
11:00.15

Corrección Diferencial
Al MISMO tiempo, los errores ocurren en cualquier ubicación dentro de la MISMA vecindad
ROVER
11:00.10
11:00.05
?
11:00.00
11:00.15

Corrección Diferencial
1 2 3 4 5 6
BASE
Satélites Vistos
Satélites Usados
1 2 3 4
1 3 5 6
ROVER
11:00.10
11:00.05
?
11:00.00
11:00.15
11:00.00
11:00.05
11:00.10
11:00.15

TRIMBLE PATHFINDER OFFICETRIMBLE PATHFINDER OFFICE

Tipos de GPS
• Navegadores
• Diferenciales (También tienen aplicaciones de Navegación).
• Fase del Código
• Fase de la Onda Portadora

Navegadores GPSNavegadores GPS
10 a 20 metros10 a 20 metros

Fumigación
Móviles
Central de Control
MONITOREO DE MOVILES

Equipos GPS DiferencialesEstaciones de Referencia.
• Sobre un Edificio
• Conexión y vaciado directo al PC.
• Antena Externa.
• Software que administra la Base con capacidad para enviar la información a un sitio FTP.
Móvil ProXT y/o ProXH
• Escala 1:1000
Móvil GeoExplorer
• GeoXM Escala 1:5000
• GeoXT Escala 1:1000
• GeoXH Escala 1:1000

Corrección Diferencial - Postproceso
Datos se procesanen la oficina
.
Estación de referencia enposición conocida
Usted en una posicióndesconocida

• Tiempo Real con Código y Fase – No se requiere posproceso– Los resultados son instantaneos– Pueden operar en dos modos
RTK RTCM
BAA
Tiempo Real

FLUJO DE DATOS
Toma de DatosPOSTPROCESO
SIG/CAD
Corrección Diferencial Sistemas SIG o CAD
Actualización Cartográfica

Actualización Cartográfica
Características generales Puntos, líneas y áreas captura simultánea de:
• información cartográfica (posiciones)• información no cartográfica (atributos)
Datos almacenados en formato compatibles con el SIG del usuario (formato estructurado)

20 m2m
1m12m
1/2cm
1cm
Dónde Ud. Necesita Estar?

Captura de Datos en Campo
• Catastro de Elementos
• Se levantan elementos lineales y areas.
• Se atributan los elementos
• Se actualiza la información comunal

GIS Mapping con imágenes satelitales
Productos para escalas menoreso iguales a 1:3000
+- 90 Ha en 5 días
QuickBird, sectorPudahuel Sur-Stgo

Imagen Quick Bird
• Actualmente ESRI CHILE S.A. Representa Digital Globe (Satélite QuickBird), imágenes con resolución a 0,50 metros.
• Producto Cartográfico a Escala 1:2000.
• Malla de puntos de control
• No se utiliza pares estereoscópicos.
•Imagen con Topografía

Con la cartografía vectorial en terreno
• Móvil GIS y Mapeo de Campo• GIS de campo basado en:
– Consultas– Captura de Datos
(con/sin GPS)– Edición y actualización
• Para equipos de mano & Sistemas móviles
• Forma parte de la Solución ArcGIS para Empresas.

Sin hacer Offset
Oohhh my god!

Offset para puntos

Sensores Láser que se integran fácilmente con el Software de campo ArcPad™ de ESRI y
las soluciones GPS TRIMBLE!

ConsultasConsultas
Daniel FloresDaniel FloresJefe unidad GPSJefe unidad GPSESRI CHILE S.A.ESRI CHILE S.A.Fono: 562-4819000Fono: [email protected]@esri-chile.com