Embed Size (px)
Citation preview

CogRobot the
Team CogRobot: Filip Birčanin, Konstantin Leidermann, Jeanna Nikolov-Ramirez, Lennart Paar
29. 6. 2015, University Vienna
Lenni Intro2Science

OUTLINE • The Plan
• The Architecture
• The Process
• Hardware • Technical Specifications • Image Capture • Code
• PID Controller
• Trials and Debugging
• Lessons Learned
2

THE PLAN • Build a robot that detects and
item in a room and picks it up • Detecting an item
• Discriminating task (blue or red) • Exploration (Random walk) • Navigation • Lifting up device
(embodied, maybe even just a paper device on a physical level)
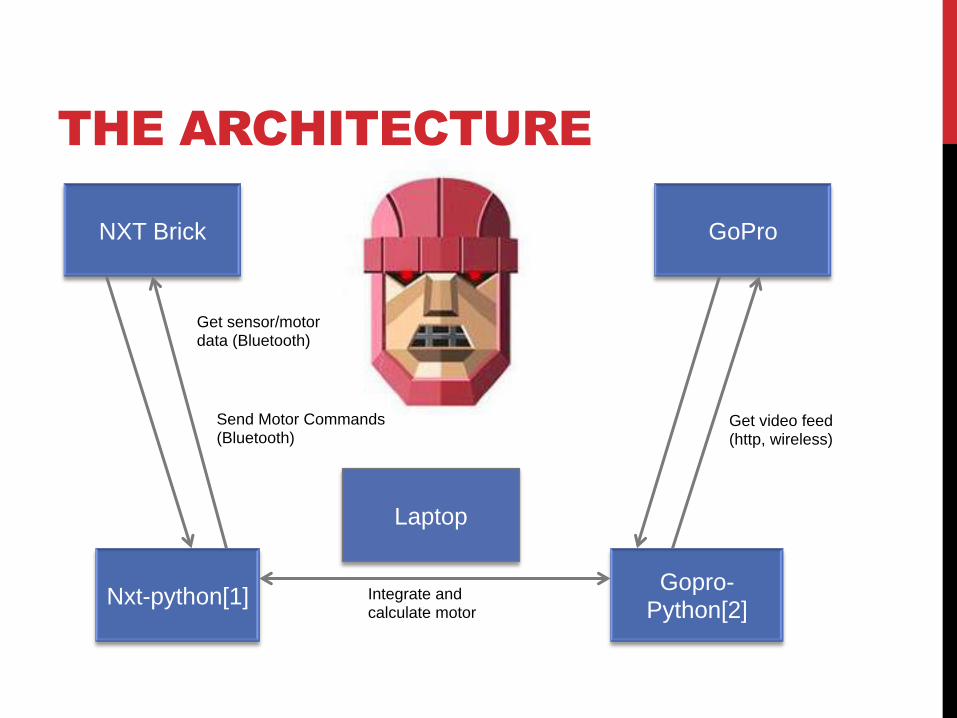
THE ARCHITECTURE
NXT Brick GoPro
Laptop
Nxt-python[1] Gopro-
Python[2]
Get sensor/motor data (Bluetooth)
Send Motor Commands (Bluetooth)
Get video feed (http, wireless)
Integrate and calculate motor

MARR’S LEVELS

THE PROCESS
• Camera Integration
• Algorithm for Object Detection
• Random Walk and Navigation
• Find out wheel speeds according to approaching of the goal
• Feedback Control (power values for different motors)
• Mechanical Lifting up Mechanism

BEGINNINGS Requirements:
• Camera should be centered in front of the wheels
• Ball lifting mechanism purely mechanical
• Ball should disappear behind camera
PEAS description
• P: Successfully picking up a ball
• E: deterministic, partially observable, size not fixed, one or two red/blue objects
• A: Wheels, Grabber
• S: Camera, (Bumpers?)

MEETINGS 5 Meetings

HARDWARE

SOFTWARE SPECIFICATIONS • Mac OS 10.8
• Python 2.7
• OpenCV
• Mindstorms NXT

IMAGE CAPTURE

CODE

CONNECT

PID CONTROLLER
A PID Controller is a common technique used to control a wide variety of machinery including vehicles, robots and even rockets.

CONTROL ALGORITHM

TRIALS & DEBUGGING

SH&%#*^#%T HAPPENS

LENNI LIKES BLUE

19
LESSONS LEARNED • Building robots is fun. • It’s way more difficult than expected. • Installing the framework is more complicated than
running it. These tasks are insanely platform dependent!
• It needs a lot of installing of libraries and packages to actually be able to start the work.
• Difficulty testing with 1 brick and 4 people. • NXT doesn’t like Yosemite. • Red fingernails are the same to a robot as a red ball.
Everything yellowish seems to be red, too. • Each task needs a motor. • Weight and volume matter big time in objects. • Pairing with Bluetooth sucks. • Batteries run out quickly. • If it isn’t tested, it doesn’t work. • Lots of trial and error.
http://tts.imtranslator.net/WW49

20
THANK YOU!
Questions?