Embed Size (px)
Citation preview

Universidad Catolica
“Nuestra Senora de la Asuncion”
Sede Regional Asuncion
Facultad de Ciencias y Tecnologıa
Departamento de Ingenierıa
Electronica e Informatica
Carrera de Ingenierıa Electronica
Electronica IIIng. Enrique Vargas PhD.
Bogado, Hugo <[email protected]>Ramırez, Pedro <[email protected]>
TRABAJO FINALCONTROLADOR DE TEMPERATURA CON PID
10 de diciembre de 2014

INDICE 2
Indice
1. Objetivo General
Disenar un control de temperatura del tipo Proporcional, Integral yDerivativo (PID). El operador podra, mediante un sistema mecanico,ingresar el Set Point(Temperatura de trabajo) . Un usuario avanzadopodra actuar directamente sobre las constantes del controlador(Ajustesdel PID).
1.1. Objetivos Especıficos
Implantar tal sistema para el control de una incubadora para crıa avıcolade todo tipo.
Caracterizar los parametros para el ajuste del controlador.
2. Planteamiento del Problema
El problema consiste basicamente en caracterizar bien la variable a querermedir, en este caso las consideraciones serıan la temperatura a la cual estaran loshuevos, la ventilacion de los mismos, humedad, etc. Una vez hecho esto se debedefinir el habitaculo para el mismo(incubadora) y las condiciones externas a lascuales estara expuesta, el sistema termico que se utilizara para acondicionar latemperatura interior del mismo, entre otros, y como consecuencia de ello elegirel sensor adecuado para la variable a medir. Una vez hecho todo esto, el primerpaso esta resuelto.
En el siguiente paso se debera disenar el sistema de potencia que manejara alcalentador del habitaculo y luego sistema de control de tal sistema de potencia,que es el PID en sı mismo, esto es claro utilizando los resultados del primeritem.
Una vez llegado a tal punto solo resta calibrar y hacer los ajustes del mismo.

3 Proceso de Incubacion 3
3. Proceso de Incubacion
Podemos definir al regimen de incubacion como el conjunto de factores fısicospresentes en el medio ambiente que rodea al huevo [?]. Los factores que lo inte-gran son: temperatura, humedad, ventilacion y volteo de los huevos. Detodos ellos la temperatura es el factor de mayor importancia, ya que, pequenasvariaciones en sus valores pueden resultar letales para muchos embriones.
El proceso de incubacion de huevos es el primer paso a dar para cualquiertipo de produccion avıcola. Generalmente, es llevado a cabo en explotacionesespecializadas en este tipo de actividad que, posteriormente, suministran lospollitos a las explotaciones dedicadas al cebo de animales, produccion de huevos,etc.
3.1. Desarrollo Embionario
Las primeras etapas se inician antes de ser puesto el huevo. En el huevorecien puesto ya es visible el blastodermo, que se aprecia como un pequeno discoentre la yema y la membrana vitelina. A los tres dıas, ya se aprecian pequenosbrotes a lo largo del cuerpo del embrion que daran lugar a las extremidades.El corazon comienza a funcionar, aunque se localiza en la parte externa delembrion. El aparato digestivo se cierra al quinto dıa, mientras que los pulmonesson apreciables el sexto dıa. A partir del octavo dıa, se aprecian zonas de densasplumas. La calcificacion del esqueleto se inicia a los 10 dıas, y se completa a los15. Los picos y unas ya se encuentran formados el dıa 16.
El tiempo de incubacion de los huevos es caracterıstico para cada una de lasespecies de aves domesticas (Tabla ??). Para el correcto desarrollo de los embri-ones, se precisa mantener unas condiciones ambientales(temperatura, humedad,nivel de oxıgeno, anhıdrido carbonico, etc).
Especie Dıas
Gallinas 21Pavos 28
Patos comunes 28Patos Muscovy 30
Gansos 30Gallinas de Guinea 25
Codornices 16Perdiz 23Paloma 14Cisne 30-37
Cuadro 1: Tiempos de incubacion de huevos.

3.2 Temperatura de incubacion 4
3.2. Temperatura de incubacion
La temperatura del aire constituye un factor fundamental de la incubacion,ya que el calentamiento de los huevos se produce debido al intercambio de calorentre el aire y los huevos.
Durante la incubacion, el nivel de temperatura optimo de la incubadora seenmarca entre 37C y 38,5C. Aunque al llegar a los ultimos dıas (2 o 3) deincubacion es necesario reducir la temperatura.
La incubadora a disenar estara equipada con un termometro y dispondra deun regulador automatico de temperatura(controlador PID), manejable medianteun sencillo sistema mecanico(potenciometro) para poder regular correctamentela temperatura interior. Una vez ajustada, el regulador automatico se encar-gara de calentar la incubadora.
3.3. Ventilacion de la incubadora
Para asegurar la pureza del aire, es necesario que la incubadora se man-tenga fresca y el aire del interior vaya renovandose regularmente. Durante suincubacion, los huevos absorben oxıgeno y liberan anhıdrido carbonico, por loque es imprescindible una circulacion de aire eficiente que garantice que el calory la humedad necesaria lleguen a los huevos.
Con ese fin, la incubadora disenada, tendra un ventilador que hace circular elaire que se concentra en la incubadora, absorbiendolo para despues distribuirloy homogeneizar la temperatura del aire del interior.
Referencias
[1] Guıa de Manejo de la Incubadora, cobb-vantress.com.

4 Diseno del habitaculo de la incubadora 5
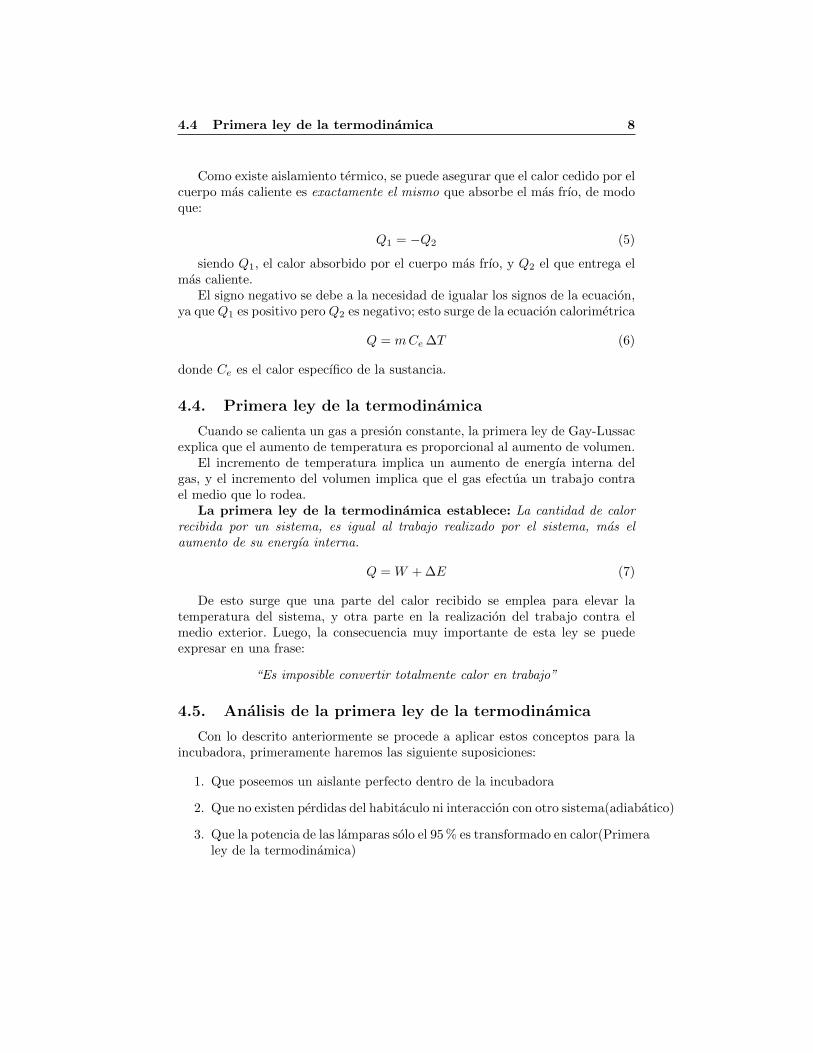
4. Diseno del habitaculo de la incubadora
En esta seccion se disenara la incubadora que se utilizara en el proyecto encuestion, ademas se analizara los efectos tantos internos como externos al cualesta expuesto, el modelo inicial es de un paralelepıpedo recto de base cuadran-gular, el cual se puede observar en la figura ??.
Caja de Madera
Fuente de calor(Lámpara)
Figura 1: Diagrama del habitaculo de la incubadora
Primeramente se analizara el efecto externo al cual estara expuesta la in-cubadora, la ley que describe este fenomeno es la de enfrıamiento de Newton,luego se vera la parte interna de ella, es decir la relacion de energıa que conlleva,necesaria para llevar a cabo una temperatura deseada.
4.1. Ley de enfriamiento de Newton
Supongamos que queremos conocer la evolucion, a lo largo del tiempo de latemperatura de una nuestra caja que ha sido calentada hasta una cierta temper-atura y depositada en un habitaculo cerrado que se mantiene a una temperaturaconstante Ta(temperatura ambiente). Podemos pensar que la temperatura de lacaja depende de la diferencia de la temperatura del propio objeto y la temper-atura ambiente(la del entorno al habitaculo). Si la caja esta muy caliente y elsalon muy frıo la perdida de calor de la caja sera muy rapida; si por el contrariolas temperaturas de la caja y del salon son casi iguales, la caja perdera calormuy lentamente.
Esto es lo que se deduce precisamente la ley de enfriamiento de Newton:Cuando la diferencia de temperaturas entre un cuerpo y su medio ambiente no esdemasiado grande, la variacion en el tiempo del calor transferido hacia el cuerpoo desde el cuerpo por conduccion, conveccion y/o radiacion es aproximadamente

4.2 Analisis de la ley de enfriamiento de Newton 6
proporcional a la diferencia de temperatura entre el cuerpo y el medio externo ya la superficie del cuerpo.
Si Q(t) representa la cantidad de calor del objeto en el instante t; la ley deenfriamiento de Newton se expresa, entonces, mediante la formula
dQ
dt= αA(T − Ta) (1)
donde α es el coeficiente de transmision (o intercambio) de calor y A el areadel cuerpo. Por otra parte, si se transfiere una pequena cantidad de calor, dQ,entre un sistema(en nuestro caso la caja incubadora) de masa m y su entornoy el sistema experimenta una pequena variacion de temperatura, dT , entoncesse define la capacidad calorıfica especıfica c, del sistema (tambien llamada calorespecıfico) como
c =1
m
dQ
dT
o, equivalentemente,dQ = m c dT
Ası pues
m cdT
dt= αA(T − Ta)
o mas simplificadamente:dT
dt= k(T (t)− Ta) (2)
siendo k = αAm c una constante asociada al material y superficie de que
esta hecha la caja. Vemos de esta forma que la variacion de la temperaturadel objeto es directamente proporcional a la diferencia de las temperaturas delobjeto y el medio ambiente.
4.2. Analisis de la ley de enfriamiento de Newton
Consideremos de nuevo la ecuacion diferencial que, aplicando la ley de en-friamiento de Newton, nos proporciona un modelo para estudiar la evolucion dela temperatura de la caja de incubacion que ha sido calentada hasta una ciertatemperatura, T0, que llamaremos temperatura inicial, y que a continuacion hasido introducida en un salon a temperatura constante T = Ta:
dT
dt= k(T (t)− Ta) (3)
En primer lugar debemos considerar la temperatura inicial: la temperaturade la caja no se solucionara igual si la temperatura inicial de la caja es 50Co si es 70C. Las condiciones iniciales para la ecuacion ?? , lo escribimos de lasiguiente forma:
T ′(t) = k(T (t)− Ta)T (0) = T0

4.3 Equilibrio termico 7
Por lo tanto, una solucion del problema de condicion inicial es
T (t) = Ta + (T0 − Ta)e−kt (4)
El cual describe como haciendo variar la temperatura ambiente, se obtendrıauna familia de curvas caracterısticas de tal ecuacion, como la figura siguiente,
0 10 20 30 40 50 60 70 80 90 1000
5
10
15
20
25
30
35
40
45
50
Tiempo(s)
Tem
pera
tura
(ºC
)
Ley de enfriamiento de Newton
T
a = 0ºC
Ta = 10ºC
Ta = 20ºC
Ta = 30ºC
Ta = 40ºC
En el cual se mantuvieron constantes T0 y k para cada grafica, esto com-prueba como es el comportamiento de la incubadora puesta a diferentes tem-peraturas ambientes, esto es claro que una vez llegado a una temperatura, seapaga el sistema que calienta la incubadora, una vez que ocurra esto entra aregir la ley de enfriamiento de newton, esto tambien se puede interpretar comoque el sistema que proporciona el calor a la incubadora, debera hacer mas “es-fuerzo”, pues una parte de la potencia entregada para ello se estarıa disipandoconstantemente al medio(por no tener una aislacion termica perfecta), esto es,deberıa compensar la disipacion y calentamiento del habitaculo en sı mismo.
4.3. Equilibrio termico
Se tiene el estado de equilibrio termico cuando dos cuerpos a diferentestemperatura, y aislados del exterior(consideramos una aislacion perfecta delhabitaculo), alcanzan luego de cierto tiempo la misma temperatura final, debidoa la tranferencia de calor del cuerpo mas caliente al mas frıo.
4.4 Primera ley de la termodinamica 8
Como existe aislamiento termico, se puede asegurar que el calor cedido por elcuerpo mas caliente es exactamente el mismo que absorbe el mas frıo, de modoque:
Q1 = −Q2 (5)
siendo Q1, el calor absorbido por el cuerpo mas frıo, y Q2 el que entrega elmas caliente.
El signo negativo se debe a la necesidad de igualar los signos de la ecuacion,ya que Q1 es positivo pero Q2 es negativo; esto surge de la ecuacion calorimetrica
Q = mCe ∆T (6)
donde Ce es el calor especıfico de la sustancia.
4.4. Primera ley de la termodinamica
Cuando se calienta un gas a presion constante, la primera ley de Gay-Lussacexplica que el aumento de temperatura es proporcional al aumento de volumen.
El incremento de temperatura implica un aumento de energıa interna delgas, y el incremento del volumen implica que el gas efectua un trabajo contrael medio que lo rodea.
La primera ley de la termodinamica establece: La cantidad de calorrecibida por un sistema, es igual al trabajo realizado por el sistema, mas elaumento de su energıa interna.
Q = W + ∆E (7)
De esto surge que una parte del calor recibido se emplea para elevar latemperatura del sistema, y otra parte en la realizacion del trabajo contra elmedio exterior. Luego, la consecuencia muy importante de esta ley se puedeexpresar en una frase:
“Es imposible convertir totalmente calor en trabajo”
4.5. Analisis de la primera ley de la termodinamica
Con lo descrito anteriormente se procede a aplicar estos conceptos para laincubadora, primeramente haremos las siguiente suposiciones:
1. Que poseemos un aislante perfecto dentro de la incubadora
2. Que no existen perdidas del habitaculo ni interaccion con otro sistema(adiabatico)
3. Que la potencia de las lamparas solo el 95 % es transformado en calor(Primeraley de la termodinamica)

4.6 Funcion de transferencia del sistema termico 9
Se ha elegido una caja de dimensiones l = 25cm, a = 25cm y h = 15cm,el cual posee un volumen de V = 9,375 ∗ 10−3m3, suponiendo que todo esteespacio es ocupado por el aire, se tiene que la masa del mismo es
d =mA
VmA = dV mA = 11,0625 ∗ 10−3kg (8)
De acuerdo a la ecuacion ?? la cantidad de calor que se desarrolla es
QA = 11,0625 ∗ 10−3 ∗ 0,238 ∗∆t (9)
El cual depende de la variacion de la temperatura deseada, el peor caso yde acuerdo a nuestro diseno se da cuando la temperatura inicial es de 0C y lafinal 50C, por lo tanto la cantidad de calor que se realiza para este caso es de
QA = 0,1316kcalequivalente→ QA = 0,55kJ
como la definicion de potencia es la cantidad de trabajo realizado por unidadde tiempo, se tiene que el trabajo necesario para realizar tal cantidad de calores
P =τ
tt =
τ
P(10)
por lo tanto el tiempo necesario para realizar una cantidad trabajodepende inversamente con la cantidad de potencia aplicada
Como se decidio utilizar 4 lamparas de 40W de potencia, el tiempo pararealizar este trabajo es
t =0,55kJ
160 ∗ 0,95= 3,26s (11)
Si bien este tiempo es muy pequeno, es ası por consider al sistema aislado,es decir sin tomar en cuenta las paredes del habitaculo que es de madera, si seaplicase esta potencia, este tiempo serıa el necesario para que el aire se calientehasta tal temperatura.
4.6. Funcion de transferencia del sistema termico
Segun [?] , nuestra incubadora puede representarse mediante un sistema deprimer orden, fısicamente este sistema representa un circuito RC, un sistematermico o similar, para hallar tal funcion se procedio de forma practica parallevarlo a cabo, basicamente se realizaron las siguientes experiencias:
Valor del coeficiente de decaimiento exponencial:
1. Se anota la temperatura inicial exterior(inicialmente igual a la inte-rior)
2. Se aplica una potencia x al sistema(tipo escalon) y se enciende uncronometro.

4.6 Funcion de transferencia del sistema termico 10
3. Se observa la temperatura a la cual tiende a estabilizarse la incubado-ra(matematicamente en t =∞)
4. Una vez aproximado a tal temperatura se marca el tiempo y este serepresenta como 5τ , tiempo en el cual la respuesta ha alcanzado el99.326 % de su cambio total.
Valores de Potencia aplicada versus Temperatura obtenida:
1. Aquı lo que se realizo fue solo tomar muestras de las temperaturasdentro de la incubadora por cada valor de potencia aplicada al sis-tema de calentamiento, con ello logramos hallar la ganancia de talsistema, el cual se observa como la pendiente de la Figura ??.
0 20 40 60 80 100 120 140 16025
30
35
40
45
50
55
60
65
70
75
X: 3.446Y: 33.28
Potencia(W)
Tem
pera
tura
(ºC
)
X: 32.86Y: 50.01
Relación Temperatura = f(Potencia)
Temperatura
Figura 2: Relacion de Potencia aplicada a la incubadora y la temperatura obteni-da.
Y tomando los puntos mostrados se puede obtener la pendiente aproximadaa la curva, el cual representa la ganania del sistema, se obtuvo que:
k ≈ 0,568

REFERENCIAS 11
El cual de manera burda serıa interpretada como 0,5oC/W , es decir porcada dos Vatios de potencia aplicada se obtiene un aumento de un grado celsiusaproximadamente, esto es relativo pues al hacer tal experiencia la temperaturaambiente era de 27oC, el cual es un factor a considerar , pues tambien influyeen el sistema, pero como solo necesitamos un modelo aproximado y a la veznuestra incubadora por ser de madera es un buen aislante termico con respectoal exterior, se puede concluir que el valor obtenido es bastante bueno.
Por lo tanto nuestra funcion de transferencia estarıa representada de la sigu-iente manera:
H(s) =k
s+ 1τ
(12)
Vease que los desarrollos hechos fueron analizados en los valores de tem-peratura de nuestro interes(valores de la incubadora) detallado en la seccion deDiseno del puente de Wheatstone.
Referencias
[1] Fısica 6, 3o Ed., Ing. Luis M. Dominguez, Centro Editorial Paraguayo.
[2] Ingenierıa de Control Moderna, 4o Edicion, Katsuhiko Ogata, Prentice Hall.

5 Diseno y analisis del sistema 12
5. Diseno y analisis del sistema
5.1. Sistemas de lazo cerrado
La caracterıstica primordial de estos sistemas es el hecho que la variablede salida o controlada, regresa o retroalimenta la entrada, con lo que se logracomparar continuamente el error existente entre la referencia o consigna y estavariable controlada.
La ventaja de comparar continuamente la variable controlada y el punto deconsigna, es el hecho que se pueden tomar diferentes acciones correctivas segunsea el error o diferencia entre estas variables.
De esta forma se logra un sistema que responde rapidamente a cambios enlos procesos o demandas externas al sistema de control. Los componentes y lasvariables que intervienen en un sistema basico de lazo cerrado se ilustran en lasiguiente figura ??.
El controlador PID surge como consecuencia de la combinacion de tres ac-ciones basicas de control -accion proporcional, integral y derivativa-.
−+r(t)
C(s)e(t)
Proceso G(s)u(t) y(t)
Muestreo
µ
Figura 3: Esquema basico de un Sistema de Control.
Donde G(s) representa el proceso cuya variable de salida y(t) se desea contro-lar y C(s) el controlador. Asimismo r(t) es la senal de referencia, o “set-point”.Si la accion del controlador es puramente integral, es decir:
u(t) = K1
∫ t
0
e(t)dt con K1 cte. (13)
y si ademas se asegura la estabilidad del sistema realimentado, entonces lavariable de salida y(t) puede ser controlada en estado estacionario sin error.Efectivamente, en estado estacionario u(t) es constante, condicion que solo severifica para error nulo (ecuacion ??).
Como inconveniente fundamental la accion integral pura presenta un efectodesestabilizador importante debido al retraso de fase de 90 que posee su funcionde transferencia.
Este efecto desestabilizador puede ser reducido si a la accion integral delcontrolador se le adiciona una accion proporcional, es decir que la accion decontrol u(t) responde a la siguiente ecuacion:
u(t) = Kpe(t) +K1
∫ t
0
e(t)dt con K1, Kp cte. (14)

5.1 Sistemas de lazo cerrado 13
La figura ?? indica este caso. La accion proporcional tiende a reducir lainestabilidad producida por la accion integral, ya que presenta un camino directoen el lazo(sin retraso de fase propio) entre la senal de error y la accion de control.En otras palabras, la accion proporcional (P) adicionada a la integral (I), dalugar a un cero en la transferencia del controlador (PI) cuyo efecto es el deneutralizar la desestabilizacion que produce el polo en el origen introducido porla accion integral.
P
I
e(t) u(t)
Figura 4: Controlador PI.
Si ante una perturbacion o cambio del set-point, la dinamica con que elsistema alcanza el nuevo estado estacionario no es el adecuado, puede incluirseuna tercer accion correctora (accion derivativa D) que en cierta manera seanticipa al error futuro.
Concretamente la idea es incluir una accion que haga que la senal de controlse incremente con la pendiente del error mas que con su valor actual. Este efecto,de adelanto en el tiempo, de la accion correctora se traduce en un incrementode la estabilidad relativa del sistema. Adicionada la accion (D), la accion decontrol u(t) resulta:
u(t) = Kpe(t) +K1
∫ t
0
e(t)dt+K2de(t)
dtcon K1, Kp cte. (15)
Desde el punto de vista de la respuesta en frecuencia la accion D puracorresponde a un cero de transferencia a frecuencia cero. Posteriormente severa que cuando la accion D es combinada con acciones I, P o PI, este cero sedesplaza del origen. La presencia de este cero adicional en la transferencia delcontrolador explica(desde el punto de vista frecuencial) el efecto estabilizadoradicional de la accion D.

5.2 Sintonıa del Controlador PID 14
5.2. Sintonıa del Controlador PID
Control PID de plantas [?] La Figura muestra un control PID de unaplanta. Como se obtuvo un modelo matematico de la panta, es posible aplicardiversas tecnicas de diseno con el fin de determinar los parametros del contro-lador que cumpla las especificaciones del transitorio y del estado estacionariodel sistema de lazo cerrado.
−+ Kp
(1 + 1
Tis+ Tds
)Planta
1
Figura 5: Control PID de una planta.
El proceso de seleccionar los parametros del controlador que cumplan conlas especificaciones de comportamiento dadas se conoce como sintonıa del con-trolador. Ziegler y Nichols sugirieron reglas para sintonizar los controladoresPID(esto significa dar valores a Kp, Ti y Td) basandose en las respuestas deescalon experimentales o en el valor de Kp que produce estabilidad marginalcuando solo se usa la accion de control proporcional.
El metodo consiste en la respuesta de la planta ante un escalon unitario,se obtiene de manera experimental, si la ppanta no contiene integradores nipolos complejos conjugados, la curva de respuesta escalon unitario puede tenerla forma de S.
La curva en forma de S se caracteriza por dos parametros: el tiempo deretardo L y la constante de tiempo T . En este caso, la funcion de transferenciase aproxima mediante un sistema de primer orden con un retardo del modosiguiente:
C(s)
U(s)=Ke−Ls
Ts+ 1(16)
Tipo de controlador Kp Ti Td
P TL ∞ 0
PI 0,9TLL0,3 0
PID 1,2TL 2L 0.5L
Cuadro 2: Regla de sintonıa de Ziegler-Nichols basada en respuesta escalon dela planta.
Zieglers y Nichols sugirieron establecer los valores de Kp, Ti y Td de acuerdoa la formula que se muestra en la Tabla ??.

5.3 Utilizacion de herramientas informaticas 15
Observese que el controlador PID sintonizado mediante el metodo de lasreglas de Ziegler-Nichols produce:
Hc(s) = 0,6T
(s+ 1
L
)2s
(17)
Por tanto, el controlador PID tiene un polo en el origen y un cero doble ens = −1/L.
5.3. Utilizacion de herramientas informaticas
Con la utilizacion del MATLAB se pudo ahorrar y aproximar el ajuste delcontrolador; una vez obtenido la funcion de transferencia del sistema termico,como del PID, se procedio a hacer las simulaciones para obtener una aproxi-macion a tal ajuste para despues llevarlo a la practica en el laboratorio, para elefecto se utilizo el simulink, y ajustando los valores de las ganancias para obtenerunos valores aproximados de Kp, Ti y Td, mediante el siguiente esquematico:
Amplificador de Instrumentación Set-Point
StepScope
PROPORCIONAL
1
PLANTA
0.568
s+1/75Kp
6
INTEGRAL
1
s+1INA126
5
DERIVATIVO
s
s+1
Figura 6: Esquematico del PID para simular con Simulink de MATLAB.
Si bien luego de esto se debio hacer un ajuste mas fino en la practica quedapatente la gran ayuda que aporta tal herramienta.

6 Etapa de la funcion de error 16
6. Etapa de la funcion de error
La primera etapa de la figura ?? es la llamada funcion de error, toma el valorde referencia o set-point r(t) y resta con la senal que nos muestrea el sensor µ,la diferencia es la senal de error al cual llamamos e(t) el cual es procesado porel siguiente modulo que es el controlador, el cual describiremos en la siguienteseccion; la primera nocion que debemos tener para hallar la diferencia es utilizarun amplificador de diferencias de la siguiente manera:
R7
R8
µ
−
+
R6
R5
r(t)
e(t)
Figura 7: Generador de error con un amplificador de diferencias
Con este circuito, y considerando por el momento al amplificador operacionalideal, como tambien que el puente esta balanceado y que ademas todas lasresistencias son iguales, la respuesta ideal del amplificador serıa:
e(t) = µ− r(t) (18)
La diferencia obtenida es la funcion de error ya mencionada, esta variable esla analizada por el controlador.
Se desarrollara una seccion completa de analisis sobre todos los efectos de loscomponentes no ideales mas adelante, en toda esta seccion se considera idealestodos los componentes ya sean amplificadores operacionales o resistencias devalores exactos.
6.1. Justificacion de la eleccion de componentes para lafuncion de error
Como se ha indicado en el ıtem anterior, se analizo la funcion de maneraideal, ahora se justificaran los parametros que se tuvieron en cuente para leellecion del componente adecuado para realizar tal funcion.
Primeramente, en lo estudiado en este curso se han visto las cracterısticasprincipales de una amplificador de diferencias, el cual forma la base de otroscircuitos importantes, tales como el de instrumentacion y puente, hay que recal-car que en la figura ?? las resistencias deben satisfacer la condicion de puente

6.1 Justificacion de la eleccion de componentes para la funcion deerror 17
balanceado como primera condicion para que su salida sea proporcional en for-ma lineal a la diferencia de sus entradas, ademas el amplificador de diferenciasdebe ser un circuito que responde solo al componente diferencial VDM , e igno-ra por completo al componente en modo comun VCM , en pocas palabras talamplificador debe tener un alto CMRR.
Realizando una investigacion al respecto, se obtuvieron varios modulos deAI(amplificadores de instrumentacion), los cuales aplican el principio de unamplificador de diferencias, uno de los cuales el cual hemos seleccionado es elINA126, que posee un CMRR tıpico de 80dB, si bien existen otros mejorescomo el INA118 el cual posee CMRR = 110dB, se opto por el primero porcumplir los requerimientos deseados, ademas posee un bajo offset de tension dela entrada, 250µV como maximo, el cual es despreciable comparada con la senal(rango en el cual deseamos amplificar), ademas una de sus caracterısticas dela hoja del fabricante establece como optimo para tal aplicacion(INDUSTRIALSENSOR AMPLIFIER: Bridge, RTD, Thermocouple).
Tambien se considero que como se trabajara en una configuracion inversoraen el PID, este debıa ser del tipo dual supply para usar tensiones negativas, paraque a traves de las etapas de todo el circuito se llegue a la salida con tensionpositiva sin tener que usar un amplificador para invertir en la ultima etapa.

7 Etapa del controlador PID 18
7. Etapa del controlador PID
En esta seccion se analizara la segunda etapa de la figura ??.En la figura ?? se puede observar el circuito equivalente del controlador PID
con cada una de sus etapas, proporcional, derivativa e integral, respectivamente.
−
+
R22
R21
−
+
R15
R16C5
−
+
R18
R17
C6
e(t)
VOP
VOD
VOI
Figura 8: Etapas integral, derivativa y proporcional controlador PID
Aquı las salidas estan negadas, ademas las senales de cada modulo del PIDdeben sumarse, esto se lleva a cabo con un sumador inversor, y por ultimo unaganancia total del controlador controlado por la resistencia R27.
El controlador utilizado es un controlador PID paralelo, el cual esta con-stituido por una etapa de accion de control proporcional, una etapa derivativay una etapa integral, de acuerdo con el diagrama de la figura ??.
El controlador tiene entonces una funcion de transferencia dada por
U(s) = Kp
(1 +
1
Tis+ Tds
)E(s) (19)
donde Kp es la constante de accion proporcional, Ti es la constante de tiempo

7 Etapa del controlador PID 19
VOP
R28
VOD
R25
VOI
R26
−
+
R29
R31
−
+
R27
u(t)
Figura 9: Etapa del sumador y ganancia total del controlador PID
de la accion integral, Td es la constante de tiempo de la accion derivativa, E(s)es la senal de error y U(s) es la senal de control.
En la figura ??, se muestra el diagrama esquematico del controlador PIDpropuesto. Si aproximamos el funcionamiento del integrador y del derivadorconsiderando que R16C5s << 1 y R18C6s >> 1 tenemos que la funcion detransferencia del controlador esta dada por
U(s) =R27R29
R28R31
(1 +
1R17R26R29C6
R28R29s
+R15R28R29
R25R29s
)E(s) (20)
donde
KP =R27R29
R28R31Ti =
R17R26C6
R28Td =
R15R28
R25
En este caso, las constantes Kp, Ti y Td se ajustan mediante la resistenciasR27, R26 y R25 respectivamente. La implementacion tiene la ventaja de separaclaramente cada una de las funciones del controlador, por lo cual es mas facilde entender su funcionamiento y mas facil de corregir cualquier desperfecto.
7.1 Justificacion de la eleccion de componentes para la etapa dePID 20
7.1. Justificacion de la eleccion de componentes para laetapa de PID
Primeramente se puede ver como el PID de topologıa paralela si cada am-plificador operacional generase un pequeno error esto se sumarıa por la etapasuguiente y este mismo podrıa agregar su error y todo ello se amplificarıa por lasiguiente etapa, es decir que los operacionales deben ser bastante buenos paraevitar que el error en cada uno sea despreciable respecto con la senal que seesta manejando, por ello primeramente en la etapa anterior a esta se utilizo unAI bastante bueno, haciendo una amplificacion y para esta etapa las senalesson grandes(del orden de los volts), seguido a esto los operacionales a utilizardeben ser del tipo dual supply por utilizar en todos una configuracion inversora,ademas como se manejaran senales pequenas para el caso de la correccion delintegrador y derivador deben tener un offset de tension pequeno en la entrada, lavelocidad de respuesta quiza no sea un problema pues como se manejara un sis-tema “lento” osea un sistema termico, como es sabido el operacional debe teneruna gran ganancia en lazo abierto para que gracias la realimentacion negativael analisis sea lo mas ideal posible.
Una vez analizado todo esto se utilizara el operacional opa227, un AO debastante precision y offset de entrada de ternsion muy pequeno.
7.2. Diseno del PCB del PID
Se analizo el calculo del ancho que debe tener una determinada pista de unaplaca de circuito impreso.
El calculo se basa en la aplicacion del estandar general para el diseno decircuitos impresos ANSI-IPC 2221 desarrollado por la IPC (Association con-necting electronics industries).
Para obtener mayor informacion del estandar se puede consultar su paginaweb en la direccion http://www.ipc.org.
Varias fueron las consideraciones que se llevaron a cabo para la realizaciondel PCB del PID, como el desacoplo de fuente y el operacional, la simetrıa delas alimentaciones, como el consumo de corriente de los operacionales es muypequeno, el ancho de las pistas serıan extremadamente finas, por lo tanto seeligıo tanto para el ruteado como para la comodidad a la hora de soldar loscomponentes que las pistas tengan 25mils de grosor, tambien se utilizaron lospuentes, couper pour o planos de tierra, entre otros. La Figura ?? indica elruteado de las pistas y los opracionales utilizados, en total son 5IC, el REF102que es una tension de referencia de 10V , los amplificadores de instrumentacionINA126, luego el operacional OPA4227 y por ultimo el OPA227.

REFERENCIAS 21
Figura 10: Diseno y ruteado del PCB para el PID.
En la siguiente placa se encuentran el PID en sı, y ademas el puente deWheatstone disenado, las cuales reciben los tres hilos del sensor, ademas poseeun conector triple para la salida, que es para conectar con la etapa de potencia,las senales enviadas al mismo, una alimentacion de +12V y la tierra de estaplaca(se uniran mediante una ferrita), esta placa(PID) posee una alimentacionde +12V,-12V y GND.
Referencias
[1] Diseno de controladores PID en tiempo discreto, y analisis de respuestautilizando herramientas computacionales, Steeve Erasmo Toledo Chojolan,2007
[2] Dseno de un controlador PID analogico para un circuito RC de segundo or-den mediante la sisotool de MATLAB, Edwin Gonzalez, Querubin Morgan,Garavito Vasquez, 2007.
[3] Controladores PID, Virginia Mazzone, http://iaci.unq.edu.ar/caut1, 2002.
[4] Controladores Basados en Estrategias PID, Eugenio Tacconi, RicardoMantz, Jorge Solsona, Pablo Puleston, Version electronica editada por :Tania Salazar y Ana Roquez.
[5] Controlador PID de temperatura de tipo didactico, M. Banuelos S., J.Castillo H., G. Rayo L. S. Quintana T., R. Damian Z., J. Perez S., Centrode Instrumentos, UNAM., [email protected]
[6] Analog Layout and Grounding Techniques, Lattice Semiconductor Corpo-ration.
[7] PCB Design Tutorial, David L. Jones, www.alternatezone.com

8 Etapa de Proceso 22
8. Etapa de Proceso
La etapa de proceso o etapa de potencia es donde de acuerdo a la senal recibi-da del controlador u(t), se responde en forma proporcional a ella(requerido por elprofesor), es decir que la incubadora se calienta o no a la medida que desee el con-trolador, una dificultad que obtuvimos es precisamente ello, si bien un pequenotiempo se deseo utilizar un PWM para el efecto, se pudo encontrar despues devarias busquedas y analisis un amplificador operacional bastante robusto, quemaneja una cantidad considerable de potencia, y se ajusta comodamente a talaplicacion, es el OPA549, fabricante TEXAS INSTRUMENTS.
Basicamente lo que se realiza en esta etapa es una configuracion no inversoradel AO, y con una sencilla relacion de resistencias se saca la proporcionalidad,ahora hablemos de la carga; se eligio como elemento calefactor lamparas deincandescencia de 40W de potencia a 12V de operacion el cual se pueden en-contrar facilmente en el mercado, con los calculos realizados en el diseno delhabitaculo de la incubadora, se pudo constatar que la velocidad de respuestatermica deseada es directamente proporcional a la potencia aplicada; es decir, sinecesito elevar la temperatura con gran rapidez necesito aplicar mas potencia,por este motivo se utilizaron 4 lamparas de tales caracterısticas que hacen untotal de 160W de potencia requerida.
La configuracion utilizada es el siguiente:
−
+
100KΩ10KΩ
u(t)y(t)
Figura 11: Etapa de potencia con OPA549
Como el valor de resistencia de las lamparas es muy pequena, se opto poruna configuracion serie(ya que una en paralelo la carga vista por la salida deloperacional es comparable con su impedancia de salida), ademas esto ayudo ano requerirle demasiada corriente al operacional conllevando que disipe menospotencia en forma de calor y por ende utilizar un disipador de calor mas pequeno,el unico inconveniente encontrado es que se debe elevar la tension, para que alrequerirle toda la potencia entrege 48V en las terminales de la carga en serie.
Ademas el OPA549 permite establecer la corriente maxima que puede en-tregar a la carga, esto es un criterio que se llevo a cabo tanto para no danar lacarga como al mismo operacional, entregando una corriente maxima de 3,5A,el cual solo se puede dar en estado de corto circuito en la salida, entre otrascaracterısticas importantes de este operacional es que posee apagado termico,indicador de estado, entre otros.

9 Diseno del puente de Wheatstone 23
9. Diseno del puente de Wheatstone
9.1. Consideraciones relevantes
Cualquiera sea el circuito de medida, hay dos consideraciones con validezgeneral para los sensores resistivos [?]. En primer lugar, todos ellos necesitan unaalimentacion electrica para poder obtener una senal de salida, pues la variacionde resistencia en sı no genera senal alguna. En segundo lugar, la magnitud de estaalimentacion, que influye directamente en la senal de salida, viene limitada porel posible autocalentamiento del sensor, ya que una variacion de su temperaturainfluye tambien en su resistencia.
Para la medida de resistencias se dispone de diversos metodos, clasificadosen metodos de deflexion y metodos de comparacion. En los primeros se mide lacaıda de tension en bornes de la resistencia a medir, o la corriente a su traves,o ambas cosas a la vez. Los segundos se basan en los puentes de medida.
9.2. Medicion por metodo de cero: puente de tres hilos.
Analizando el sensor PT100 que utilizaremos en el proyecto y bajo las indi-caciones del Ing. Ivan Fuster, se investigo y se ha llegado a la conclusion que esel mejor metodo de medicion para las caracterısticas del sensor(tres hilos); co-mo esta configuracion de hilos del sensor esta disenado ası por el motivo que enalgunas aplicaciones se encuentra lejos del dispositivo transductor, es inevitablela presencia de hilos de coneccion largos, que anaden resistencias en serie conel sensor. La solucion este problema se obtiene con el metodo de conceccionSiemens o de tres hilos. Los cables 1 y 3 deben ser iguales y experimentar lasmismas variaciones termicas, las caracterısticas del cable 2 son irrelevantes puesen el equilibrio no circula corriente alguna por la rama central del puente. Enel equilibrio tendremos:
R3 =R4(R2 +Rh)
R1−Rh (21)
El error relativo en la medida de R3 es
ε =R3 −R4R2/R1
R3=RhR3
(R4
R1− 1
)(22)
Como puede verse, el error decrece cuando R3 es grande respecto a Rh.
9.3. Autocalentamiento y corriente de excitacion
Cualquiera que sea el metodo de conexion, se debe hacer pasar una ciertacorriente I por el elemento sensor de modo de poder medir su resistencia.
Esta corriente I es llamada corriente de excitacion . Un problema que puedeocurrir es que la corriente de excitacion genere por efecto Joule (P = I2R) uncalentamiento del elemento sensor aumentando su temperatura y produciendoası un error en la lectura. Este problema es mas pronunciado mientras mas

9.4 Sensibilidad y linealidad 24
pequena sea la Pt100 (menor capacidad de disipacion del calor generado) y ala vez mientras se este midiendo en un medio menos conductor de calor. Porejemplo es mayor cuando se mide temperatura en el aire que cuando se la mideen el agua. Valores tıpicos del error producido en un Pt100 son del orden de0,5C/mW generado cuando la Pt100 esta en aire sın circular y 0,05C con lamisma Pt100 en agua. La potencia de autocalentamiento depende del cuadradode la corriente de excitacion, luego mientras menor sea esta corriente, muchomenor sera el efecto.
9.4. Sensibilidad y linealidad
La forma habitual de obtener una senal electrica como resultado de unamedida empleando un puente de Wheatstone [?], es mediante el metodo dedeflexion. En este, en lugar de valorar la accion necesaria para restablecer elequilibrio en el puente, se mide la diferencia de tension entre ambas ramas. Conla figura ??, si para x = 0 se desea que el puente este equilibrado, que es lohabitual, se puede definir un parametro.
+−V
R1
R4
R2
R3 → R0(1 + x)
VS
Figura 12: Puente de Wheatstone para el diseno
k =R1
R4=R2
R0(23)
Como lo que deseamos es medir la tension entre las tomas centrales, se tienepor medio de un divisor resistivo en ambas ramas
VS = V
(R3
R2 +R3− R4
R1 +R4
)= V
kx
(k + 1)(k + 1 + x)(24)
De lo que se puede deducir que la tension de salida solo es proporcional a lasvariaciones de resistencia cuando se cumpla x≪ k+ 1. Como esta medicion seva a interpretar como proporcional a las variaciones de R3, la sensibilidad sera
S =V k
R0
1
(k + 1)(k + 1 + x)(25)

9.5 Consideraciones finales y desarrollo 25
por lo tanto, para hallar el maximo de esta sensibilidad, en funcion de k, seobtiene cuando se cumple que dS/dk = 0. Entonces se tiene:
k2 = 1 + x (26)
Y con la segunda derivada comprobamos efectivamente que este punto cor-responde a un maximo.
Como la linealidad no es una condicion necesaria para tener una optimaexactitud, sino que lo importante es la reproducibilidad, la interpretacion delresultado siempre es mas facil si la salida es proporcional a la magnitud medida,y de ahı nuestro interes de la linealidad en la ecuacion ??.
En nuestro caso como optamos utilizar un termometro resistivo(PT100),nuestra x es muy grande. Por lo tanto nos limitamos a las siguiente alternativas:
1. Limitamos un rango de medida pequeno en el que la no linealidad maximasea despreciable con la exactitud que deseamos en la medida.
2. Por el hecho anterior, estamos conscientes que perdemos cierta sensibili-dad, pero trantando de compensarla en parte con el aumento de la tensionde alimentacion. El lımite de esta viene dado por la maxima potencia quepuede disipar nuestro sensor(caso extremo pues trataremos de evitar enlo posible el error de medida por autocalentamiento del sensor).
9.5. Consideraciones finales y desarrollo
Las restricciones que pondremos al diseno del puente de wheatstone son:
1. Rango de medicion de 0C - 50C.
2. Error inferior al 0.5 % de la lectura.
3. Coeficiente de temperatura α = 0,00385, caracterıstico del RTD-PT100de platino.
4. Coeficiente de disipacion termica de 6mV/C, pues la medicion sera en elaire(temperatura ambiente).
5. Un error agregado menor de 0.2 % al fondo de escala, es decir a los 50C,porque el error es dependiente de la temperatura como se vera.
De la ecuacion ?? se desea como se dijo anteriormente que sea lo mas linealposible, por lo tanto, como se va interpretar esta salida como lineal, se esta pen-sando en una respuesta ideal del tipo:
V1 = VkαT
(k + 1)2(27)
Entonces se puede hallar el error relativo debido a la falta de linealidad dela forma:

9.5 Consideraciones finales y desarrollo 26
ε =V1 − VSVS
=αT
k + 1(28)
Como se menciono, aquı se puede ver el hecho que el error es directamenteproporcional a la temperatura. El error relativo maximo se tendra entonces paraT = 50C. Nuestra imposicion es de ε < 5 ∗ 10−3 y por tanto,
0,00385 ∗ 50
k + 1< 5 ∗ 10−3 (29)
De esto se deduce que:
k > 37,5
La eleccion de valores superiores a los hallados implicarıa una perdida de lasensibilidad, que ademas vendra determinada por tension de alimentacion delpuente. Es por ello que la eleccion de este viene limitada por la posibilidad deautocalentamiento del sensor, considerando este error constante, se debe cumplirlo siguiente
P =
(V
R2 +RT
)2
RT < 0,2 % ∗ 50 ∗ 6mW/C = 0,6mW (30)
Para hallar el punto donde la potencia disipada es maxima, hay que derivarla expresion correspondiente, igualarla a cero y verificar que la derivada segundaes negativa en dicho punto. Procediendo de esta forma, resulta que el maximoautocalentamiento corresponde a RT = R2. Dado que en el rango impuesto estono se cumple, se tendra que el peor caso es para T = 50C, ya que en ese puntoRT alcanza su valor maximo, que es de 119,25Ω, de la ecuacion ?? se tiene:
V <√
0,6∗10−3∗(R2+RT (50C))2
RT (50C)
Que es la tension al cual debe alimentarse el puente disenado.

9.6 Tabla de PT100 27
9.6. Tabla de PT100
Aquı se dan los valores de resistencia del PT100 de platino en el rango denuestro interes.
C 0 1 2 3 4 5 6 7 8 9
0 100.00 100.39 100.78 101.17 101.56 101.95 102.34 102.73 103.12 103.5110 103.90 104.29 104.68 105.07 105.46 105.85 106.24 106.63 107.02 107.4120 107.79 108.18 108.57 108.96 109.35 109.74 110.12 110.51 110.90 111.2930 111.67 112.06 112.45 112.84 113.22 113.61 114.00 114.38 114.77 115.1640 115.54 115.93 116.32 116.70 117.09 117.47 117.86 118.24 118.63 119.0150 119.40 119.78 120.17 120.55 120.94 121.32 121.71 122.09 122.48 122.86
Cuadro 3: Tabla de valores de resistencia(Ω) del PT100.
9.7. Toma de decisiones
Una vez hecho todos los calculos anteriores y despues de varias pruebas quetuvimos, es decir probamos varias configuraciones de puente, donde observamosque la mayor dificultad es que la sensibilidad era dependiente de la temperatu-ra, lo cual evitamos en lo posible para tenerla constante en todo el rango demedicion por buscar una buena reproducibilidad ya dicha, ademas y por so-bre todo la dificultad mayor fue encontrar las resistencias de precision, el cualpor ejemplo una leve variacion (1Ω) influıa en casi 3C de error, por lo quede utilizaron resistencias de 1 % de tolerancia, Otro tema de interes es la ten-sion de alimentacion que tendra el puente, fue una consideracion que hicimos yutilizaremos las fuentes de referencia(cortesıa TEXAS INSTRUMENTS), estoinfluye de gran manera en la sensibilidad por ello fue una tarea que realizamoscon detalle, sin mas que decir los valores optados son:
Resistencia R1 = R2 = 3,92kΩ (1 %)
Resistencia R4 = 105Ω (1 %)
Tension de referencia REF102(10V Precision Voltage Reference)
Con estas consideraciones llevadas a cabo se tiene la siguiente caracterısticaimportante del puente disenado
S = 1,0295mV/C
Es importante destacar que por la eleccion de la resistencia R4 = 105Ωnuestra referencia no estara a cero grados celsius, sino de acuerdo a la tabladada, el valor en donde el puente lanzara 0V sera a 13C aproximadamente.

9.8 Errores del diseno del puente 28
9.8. Errores del diseno del puente
De acuerdo a la ecuacion ??, se puede observar la grafica del error relativoen el rango de interes.
0 5 10 15 20 25 30 35 40 45 500
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
Temperatura(ºC)
Err
or r
elat
ivo(
%)
Error relativo del puente de Wheatstone
Error relativo
Figura 13: Error relativo del puente con las consideraciones hechas.
El cual se ajusta bastante bien a lo deseado como primera aproximacion.
Referencias
[1] Sensores y acondicionadores de senal 4ta Ed., Ramon Pallas Areny, EditoraMarcombo.

10 Etapa de muestreo 29
10. Etapa de muestreo
Esta es la etapa final del diagrama de la figura ??, aquı existe la retoalime-nacion de la salida de la etapa de proceso y(t) a la de funcion de error µ, nosdamos cuenta que la realimentacion tiene un efecto muy importante como lo esla reduccion del error entre la variable controlada y el punto de consigna, sinembargo no es el unico efecto que tiene sobre el sistema de control, ya que tam-bien tiene la caracterıstica de variar algunos parametros del sistema como lo sonla ganancia global, estabilidad, ancho de banda, margen de fase, perturbacionesy sensibilidad.
La realimentacion tambien actua sobre senales aleatorias que afectan al sis-tema, a las cuales se les denomina perturbaciones o ruido, estas senales existenen todos los sistemas y son inevitables, pero con el uso de la realimentacionse pueden reducir sus efectos, aunque tomando en cuenta que la cantidad decorreccion dependera del lugar en donde actuen estas senales en el sistema decontrol.
En la seccion anterior se realizo el desarrollo de acondicionamiento del sensora utilizar, aquı solo se debe tomar esa senal generada por el mismo y llevarloal circuito de funcion de error, esto de vuelta se lleva a cabo mediante unamplificador de diferencias, de la siguiente manera
R
R
Vs+
−
+
R
R
Vs−
µ
Figura 14: Etapa de muestreo con un amplificador de diferencias
10.1. Justificacion de la ellecion de componente para laetapa de muestreo
Para llevar a cabo esto tan solo basta utilizar un AI en las salidas del puenyede Wheatstone disenado, tal operacional ya se describio en detalle en la seccionde la funcion de error, se utilizo un modulo por la presicion que se desea tenerrya que como ers sabido para un amplificador de diferencias las resistencias debenestas lo mas macheadas posibles y ello se logra en el proceso de integrado, ademaspara esta etapa de amplificacion se utilizaron resistencias de precision para notener un error agravado en la lectura de la temperatura. La ganancia del INA

10.1 Justificacion de la ellecion de componente para la etapa demuestreo 30
126 es de 45, por lo tanto la salida esta tabulada en las siguiente tabla, como sedijo la referencia se ha movido a 13oC porque no se pudo conseguir resistenciasde precision de 100Ω para que la referencia este a 0oC.
13 0,0000 14 0,1050 15 0,2100 16 0,3149 17 0,419913,125 0,0131 14,125 0,1181 15,125 0,2231 16,125 0,3281 17,125 0,433013,25 0,0262 14,25 0,1312 15,25 0,2362 16,25 0,3412 17,25 0,4462
13,375 0,0394 14,375 0,1443 15,375 0,2493 16,375 0,3543 17,375 0,459313,5 0,0525 14,5 0,1575 15,5 0,2624 16,5 0,3674 17,5 0,4724
13,625 0,0656 14,625 0,1706 15,625 0,2756 16,625 0,3805 17,625 0,485513,75 0,0787 14,75 0,1837 15,75 0,2887 16,75 0,3937 17,75 0,4986
13,875 0,0919 14,875 0,1968 15,875 0,3018 16,875 0,4068 17,875 0,5118
18 0,5249 19 0,6299 20 0,7348 21 0,8398 22 0,944818,125 0,5380 19,125 0,6430 20,125 0,7480 21,125 0,8529 22,125 0,957918,25 0,5511 19,25 0,6561 20,25 0,7611 21,25 0,8661 22,25 0,9710
18,375 0,5643 19,375 0,6692 20,375 0,7742 21,375 0,8792 22,375 0,984218,5 0,5774 19,5 0,6824 20,5 0,7873 21,5 0,8923 22,5 0,9973
18,625 0,5905 19,625 0,6955 20,625 0,8005 21,625 0,9054 22,625 1,010418,75 0,6036 19,75 0,7086 20,75 0,8136 21,75 0,9186 22,75 1,0235
18,875 0,6167 19,875 0,7217 20,875 0,8267 21,875 0,9317 22,875 1,0367
23 1,0498 24 1,1548 25 1,2597 26 1,3647 27 1,469723,125 1,0629 24,125 1,1679 25,125 1,2729 26,125 1,3778 27,125 1,482823,25 1,0760 24,25 1,1810 25,25 1,2860 26,25 1,3910 27,25 1,4959
23,375 1,0891 24,375 1,1941 25,375 1,2991 26,375 1,4041 27,375 1,509123,5 1,1023 24,5 1,2072 25,5 1,3122 26,5 1,4172 27,5 1,5222
23,625 1,1154 24,625 1,2204 25,625 1,3253 26,625 1,4303 27,625 1,535323,75 1,1285 24,75 1,2335 25,75 1,3385 26,75 1,4434 27,75 1,5484
23,875 1,1416 24,875 1,2466 25,875 1,3516 26,875 1,4566 27,875 1,5615
28 1,5747 29 1,6796 30 1,7846 31 1,8896 32 1,994628,125 1,5878 29,125 1,6928 30,125 1,7977 31,125 1,9027 32,125 2,007728,25 1,6009 29,25 1,7059 30,25 1,8109 31,25 1,9158 32,25 2,020828,375 1,6140 29,375 1,7190 30,375 1,8240 31,375 1,9290 32,375 2,033928,5 1,6272 29,5 1,7321 30,5 1,8371 31,5 1,9421 32,5 2,0471
28,625 1,6403 29,625 1,7453 30,625 1,8502 31,625 1,9552 32,625 2,060228,75 1,6534 29,75 1,7584 30,75 1,8634 31,75 1,9683 32,75 2,0733
28,875 1,6665 29,875 1,7715 30,875 1,8765 31,875 1,9815 32,875 2,0864
33 2,0996 34 2,2045 35 2,3095 36 2,4145 37 2,519533,125 2,1127 34,125 2,2177 35,125 2,3226 36,125 2,4276 37,125 2,532633,25 2,1258 34,25 2,2308 35,25 2,3358 36,25 2,4407 37,25 2,5457
33,375 2,1389 34,375 2,2439 35,375 2,3489 36,375 2,4539 37,375 2,558833,5 2,1520 34,5 2,2570 35,5 2,3620 36,5 2,4670 37,5 2,5720
33,625 2,1652 34,625 2,2701 35,625 2,3751 36,625 2,4801 37,625 2,585133,75 2,1783 34,75 2,2833 35,75 2,3882 36,75 2,4932 37,75 2,5982
33,875 2,1914 34,875 2,2964 35,875 2,4014 36,875 2,5063 37,875 2,6113
Figura 15: Valores de salida del amplificador de diferencias.

10.1 Justificacion de la ellecion de componente para la etapa demuestreo 31
38 2,6244 39 2,7294 40 2,8344 41 2,9394 42 3,044438,125 2,6376 39,125 2,7425 40,125 2,8475 41,125 2,9525 42,125 3,057538,25 2,6507 39,25 2,7557 40,25 2,8606 41,25 2,9656 42,25 3,0706
38,375 2,6638 39,375 2,7688 40,375 2,8738 41,375 2,9787 42,375 3,083738,5 2,6769 39,5 2,7819 40,5 2,8869 41,5 2,9919 42,5 3,0968
38,625 2,6901 39,625 2,7950 40,625 2,9000 41,625 3,0050 42,625 3,110038,75 2,7032 39,75 2,8082 40,75 2,9131 41,75 3,0181 42,75 3,1231
38,875 2,7163 39,875 2,8213 40,875 2,9263 41,875 3,0312 42,875 3,1362
43 3,1493 44 3,2543 45 3,3593 46 3,4643 47 3,569243,125 3,1625 44,125 3,2674 45,125 3,3724 46,125 3,4774 47,125 3,582443,25 3,1756 44,25 3,2806 45,25 3,3855 46,25 3,4905 47,25 3,5955
43,375 3,1887 44,375 3,2937 45,375 3,3987 46,375 3,5036 47,375 3,608643,5 3,2018 44,5 3,3068 45,5 3,4118 46,5 3,5168 47,5 3,6217
43,625 3,2149 44,625 3,3199 45,625 3,4249 46,625 3,5299 47,625 3,634943,75 3,2281 44,75 3,3330 45,75 3,4380 46,75 3,5430 47,75 3,6480
43,875 3,2412 44,875 3,3462 45,875 3,4511 46,875 3,5561 47,875 3,6611
48 3,6742 49 3,7792 50 3,8842 51 3,9892 52 4,094148,125 3,6873 49,125 3,7923 50,125 3,8973 51,125 4,0023 52,125 4,107348,25 3,7005 49,25 3,8054 50,25 3,9104 51,25 4,0154 52,25 4,1204
48,375 3,7136 49,375 3,8186 50,375 3,9235 51,375 4,0285 52,375 4,133548,5 3,7267 49,5 3,8317 50,5 3,9367 51,5 4,0416 52,5 4,1466
48,625 3,7398 49,625 3,8448 50,625 3,9498 51,625 4,0548 52,625 4,159748,75 3,7530 49,75 3,8579 50,75 3,9629 51,75 4,0679 52,75 4,1729
48,875 3,7661 49,875 3,8711 50,875 3,9760 51,875 4,0810 52,875 4,1860
Figura 16: Valores de salida del amplificador de diferencias.

11 Fuente de alimentacion 32
11. Fuente de alimentacion
La funcion de una fuente de alimentacion es convertir la tension alterna enuna tension continua y lo mas estable posible, para ello se usan los siguientescomponentes: Transformador de entrada, Rectificador a diodos, Filtropara el rizado, Regulador (o estabilizador) lineal.
11.1. Rectificador de onda completa
En la Figura ?? esta indicado un circuito rectificador de onda completa. Estecircuito comprende dos circuitos de media onda conectados de tal forma que laconduccion la realiza uno durante la mitad de un ciclo de la alimentacion y elotro durante la segunda mitad.
Vm
vL(t)
Diodo A enconducción
Diodo B enconducción
(a) Diagrama del circuito
(b) Tensión de salidat
Vmsen(t)
Vmsen(t)
A
Ideal
vL(t)B
Ideal
+
−+
−RL
+
−
Figura 17: Circuito rectificador de onda completa.
La corriente en la carga que es la suma de dos corrientes, tiene la formaindicada en la Figura ?? . El valor continuo y eficaz de la corriente de carga yde la tension puede obtenerse facilmente con las siguientes expresiones:
Idc =2Imπ
Irms =Im√
2Vdc =
2ImRLπ
(31)
donde Vm es la tension de pico del secundario del transformador entre elpunto medio y un extremo, vemos que la tension continua de salida varıa con

11.2 Filtros de condensador 33
la corriente de la siguiente forma:
Vdc =2Vmπ− IdcRf (32)
donde Rf es la resistencia en directa del diodo.
Tension inversa de pico Para cada circuito rectificador hay una tensionmaxima a la que puede estar sometido el diodo. Este potencial se denominatension inversa de pico, ya que ocurre durante la parte del ciclo en la queel diodo no conduce. En un circuito de onda completa, se obtiene el doble dela tension pico del secundario, es decir 2Vm. En el instante en que la tensiondel secundario respecto al punto medio tiene su valor de pico Vm, el diodoD1 esta conduciendo y el diodo D2 no. Si aplicamos las leyes de Kirchhoff albucle exterior y despreciamos la pequena caıda de potencial en D1, obtendremos2Vm como tension de pico inversa en D2. Observese que este resultado se lograsin hacer referencia a la naturaleza de la carga, que puede ser una resistenciapura RL o la combinacion de RL y algun elemento reactivo para “filtrar” elrizado. Llegamos a la conclusion de que, en un rectificador de onda completa,independientemente del filtro empleado, la tension inversa de pico en cada diodoes el doble de la maxima tension del transformador medida entre el punto medioy uno de los extremos.
11.2. Filtros de condensador
El filtrado suele realizase colocando un condensador en paralelo con la carga.El funcionamiento de este sistema se basa en el hecho de que el condensadoralmacena energıa durante el perıodo de conduccion y libera energıa sobre lacarga durante el perıodo de no conduccion o inverso. En estas circunstanciasel tiempo durante el que la correinte pasa a traves de la carga se prolonga yel rizado disminuye considerablemente. La tension de rizado se define como ladesviacion de la tension de la carga de su valor medio o contınuo.
Figura 18: Rectificador de media onda con condensador de filtro.

11.3 Diseno de la fuente 34
Circuito de onda completa Una analisis del filtro de onda completa sepuede ver en detalle en [?], en donde se obtiene que la salida en tension contınuapara valores dados de los parametros ω, RL, C, y Vm. Si la descarga total delcondensador(tension de rizado) se indica por Vr, el valor medio de la tension esaproximadamente:
Vdc = Vm −Idc
4fC(33)
En donde se conluye que el rizado varıa directamente con la corrientede carga Idc e inversamente con la capacidad. De ahı que, para tenerun rizado bajo y asegurar una buena regulacion, deban emplearse capacidadesbastante grandes(del orden de decenas de microfaradios).
Las ventajas mas sobresalientes de los rectificadores que empleen conden-sadores de filtro, son el pequeno rizado y elevadas tension con cargas ligeras.La tension en vacıo es ,teoricamante, igual a la maxima del transformador. Losinconvenientes de este sistema son la regulacion relativamante pobre, el rizadoelevado a grandes cargas, y los picos de corriente que deben pasar por los diodos.
11.3. Diseno de la fuente
Como el consumo de nuestro circuito es muy pequeno, solo utilizmos 5IC, loscuales son de MICROPOWER en el orden de los µA por lo tanto disenamosuna fuente que entregara como maximo 1A de corriente a ±12V .
Dentro de los reguladores de voltaje con salida fija, se encuentran los pertenecientesa la familia LM78xx, donde “xx” es el voltaje de la salida. Estos son 5, 6, 8, 9,10, 12, 15, 18 y 24V, entregando una corriente maxima de 1 Amper y sopor-ta consumos pico de hasta 2.2 Amperes. Poseen proteccion contra sobrecargastermicas y contra cortocircuitos, que desconectan el regulador en caso de quesu temperatura de juntura supere los 125C.
Los LM78xx son reguladores de salida positiva, mientras que la familiaLM79xx son para voltajes equivalentes pero con salida negativa. Ası, un LM7805es capaz de entregar 5 voltios positivos, y un LM7912 entregara 9 voltios nega-tivos.
Para alcanzar la corriente maxima de 1 Amper es necesario dotarlo de undisipador de calor adecuado, sin el solo obtendremos una fraccion de esta corri-ente antes de que el regulador alcance su temperatura maxima y se desconecte.
La tension de entrada es un factor muy importante, ya que debe ser supe-rior en unos 3 voltios a la tension de salida (es el mınimo recomendado por elfabricante), pero todo el exceso debe ser eliminado en forma de calor.
Para una fuente de tension positiva y negativa, partimos de un transfor-mador con toma central media, mediante un puente de diodos conformado porlos diodos 1 al 4 rectificamos la corriente entregada por el secundario del trans-formador, pero esta vez usamos el positivo para obtener 12 voltios respecto delpunto medio del transformador (que sera nuestro “0”) y el negativo para obten-er -12V mediante un regulador LM7915, que como vimos antes es un reguladorde voltaje negativo. Nuevamente, hay que filtrar el ripple a la salida del puente

REFERENCIAS 35
5
5
4
4
3
3
2
2
1
1
D D
C C
B B
A A
0
+12V
0
0
0
-12V
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
<Title>
A
1 1Monday, July 25, 2011
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
<Title>
A
1 1Monday, July 25, 2011
Title
Size Document Number Rev
Date: Sheet of
<Doc> <RevCode>
<Title>
A
1 1Monday, July 25, 2011
U1LM7812C
U1LM7812C
IN1 OUT 2
GN
D3
U2LM7912C
U2LM7912C
IN3 OUT 2GN
D1 C6
1uFC61uF
C4100nFC4100nF
C3100nFC3100nF
C1470uFC1470uF
C51uFC51uF
V1
FREQ = 50VAMPL = 311VOFF = 0
V1
FREQ = 50VAMPL = 311VOFF = 0
T1
Sec 18+18V 0.25A
T1
Sec 18+18V 0.25A
1 5
6
4 8
C2470uFC2470uF
- +
D1
KBP06G
- +
D1
KBP06G
2
1
3
4
Figura 19: Fuente disenada.
diodos, tarea que se lleva a cabo mediante los capacitores electrolıticos C1 yC2. A continuacion, los reguladores LM7815 y LM7915 se encargan de regularlas tensiones de salida. Esta fuente es ideal para alimentar el circuito a nuestrocriterio pues necesita una alimentacion positiva y negativa.
Referencias
[1] Electronica Integrada, circuitos y sistemas analogicos y digitales, JacobMillman y Christos C. Halkias, Editorial Hispano Europea, Barcelona Es-pana.

12 Conclusiones Finales 36
12. Conclusiones Finales
Se ha demostrado como la eficiencia de un sistema puede aumenta notable-mente con la implementacion en el mismo de un controlador como es el PID,las siguientes acotaciones son dignas de mencionar:
Aumento de la velocidad de respuesta.
Consumo menor de potencia comparado con los controladores del tipoon − off , los cuales aplican al maximo el consumo e potencia en ciertosintervalos por medio de una implementacion del tipo histeresis.
Reduccion al mınimo del error en estado estacionario.
Mayor estabilidad comparado con los sistemas on − off los cuales enalgunos casos las oscilaciones son muy pronunciadas.
Ademas el diseno de este sistema facilmente puede ser adaptado para lamedicion de otro tipo de variables que cumplen con las mismas condicionesbasicas del mismo, como por ejemplo:
Control de temperatura en incubadoras de recien nacidosEn este tipo de aplicaciones se requiere una precision de +/- 1oC. Porotro lado no se admiten sobreimpulsos de mas del 5 %. El tiempo de asen-tamiento no es un factor crıtico.
Control de temperatura para estudios del plasma de la sangreEn este caso, se deberıa recurrir a un sistema (sensor y control) de unaprecision mucho mayor que en los casos anteriores, aproximadamente deuna decima de grado. La temperatura debe permanecer constante a 37oCsin sufrir variacion alguna.
Es ası que las modificaciones del mismo son minusculas.
12.1. Mejoramiento del sistema
Aquı analizaremos las mejoras hechas al sistema a traves del controladorimplementado. En la Figura ??, se pueden observar la respuesta del mismo auna entrada del tipo escalon.
La salida del sistema se ve mejorado notablemente por la aplicacion del mis-mo, ademas el ajuste hecho se realizo de tal manera para que no exista unsobrepaso pronunciado y que el sistema no se vuelva oscilatorio, la mayor difi-cultad encontrada en la implementacion del trabajo fue calibrar el controlador,fue de gran ayuda [?], en donde explica dos metodos de sintonizacion de PID’s,ademas un factor que se debe llevar en cuenta es el retardo que existe al sensar lavariable(temperatura), pues el sensor podrıa tener un retardo como en nuestrocaso el cual llevarıa a una retroalimentacion positiva si es muy grande.

12.1 Mejoramiento del sistema 37
Los valores implementados para la sintonıa del controlador de acuerdo a laecuacion ?? fueron:
KP = 5 Ti = 30 Td = 1000

12.1 Mejoramiento del sistema 38
0 50 100 150-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1Señal de error
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Salida del sistema retroalimentado compensado
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Salida del sistema retroalimentado no compensado
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Señal de entrada
Time offset: 0
Figura 20: Mejoramiento de la respuesta del sistema mediante el controladorPID.





























