Embed Size (px)
Citation preview

Blind Source Camera Identification
Introduction
In today’s digital age, the creation and manipulation of digital images is
made simple by digital processing tools that are easily and widely
available. As a consequence, we can no longer take the authenticity of
images, analog or digital, for granted. This is especially true when it comes
to legal photographic evidence
Introduction
Although digital watermarks have been proposed as a tool to provide
authenticity to images, it is a fact that the overwhelming majority of
images that are captured today do not contain a digital watermark.
And this situation is likely to continue for the foreseeable future.

Problem Statement
There are images from unknown source with no or untraceable
watermark, but it is known to originate from either one of limited given
standard cameras , say x, y, z. It is needed to classify the images into
the groups based on originality. So the problem simplifies to whether a
particular image came was originated from camera x, camera y or
camera z.
Related Works
A number of features of images have been identified that can
prove to be a crucial part in classification .
Classification of the images have been a matter of study for past
few years and it has been done with maximum achieved average
accuracy of 93.42 % for set of two cameras, namely Nikon and
Sony.
Classification of images among 5 different cameras has been
conducted with an average accuracy of 88.02 %.
It is found out that a full generality of classification i.e. classification
among a set of unknown number of devices , is difficult on a higher
level.
Goals and Objectives
Identifying features that can be used in classification.
Develop a classifier function that classifies images into two groups
based on originality.
Methodology
34 features have been identified till now that are and can be used
in classification.
The features are mentioned in the following slides :-
AVERAGE PIXEL VALUE
This measure is based on the gray world assumption, which states
that the average values in RGB channels of an image should
average to gray, assuming that the images has enough color
variations. Thus the features are the mean value of the 3 RGB
channels (3 features).
RGB PAIRS CORRELATION
This measure attempts to capture the fact that depending
on the camera structure, the correlation between different color
bands could vary. There are 3 correlation pairs, namely RG, RB (3
features).
NEIGHBOR DISTRIBUTION CENTER OF MASS
This measure is calculated for each color band separately
by first calculating the number of pixel neighbors for each pixel
value, where a pixels neighbor are defined as all pixels which
have a difference of value of 1 or -1, from the pixel value in
question.
RGB pairs energy ratio
It is important because it is used in the process of white point correction which
is an integral part of a camera pipeline. The calculated features (3 features) are:
E1 = |G|2 /|B|2
E2 = |G|2 /|R|2
E3 = |B|2 /|R|2
WAVELET DOMAIN STATISTICS
Decomposed each color band of the image using separable quadratic
mirror filters and then calculated the mean for each of the 3 resulting sub-bands
(9 features).
IMAGE QUALITY METRICS (IQM)
We can categorize the set of IQM used into 3 classes :-
• The pixel difference based measures (i.e. mean square error, mean absolute
error, modified infinity norm)
• The correlation based measures (i.e. normalized cross correlation, Czekonowski
correlation)
• The spectral distance based measures (i.e. spectral phase and magnitude errors)
This is a set of 13 features.
Classifier
• We are going to use Support Vector Machine(SVM) Classifier.
• It is primarily a classier method that performs classification tasks by
constructing hyper planes in a multidimensional space.
• To construct an optimal hyper plane, SVM employs an iterative
training algorithm, which is used to minimize an error function.
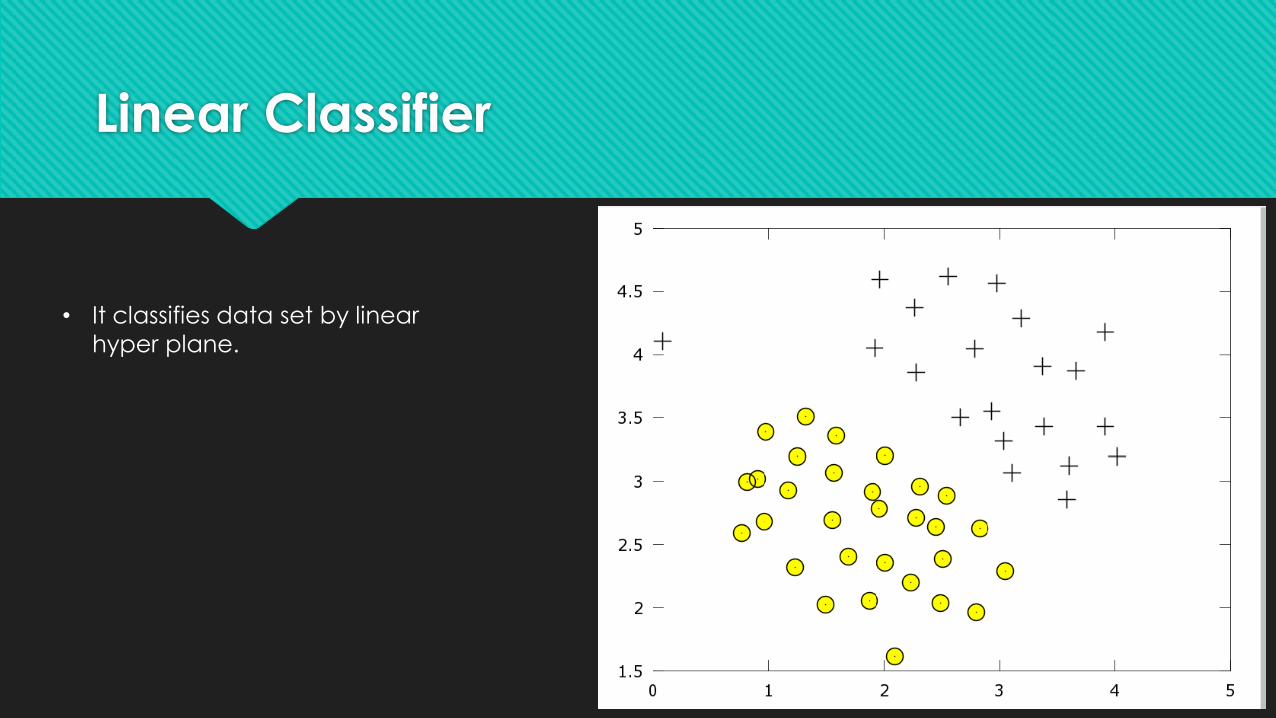
Linear Classifier
• It classifies data set by linear
hyper plane.
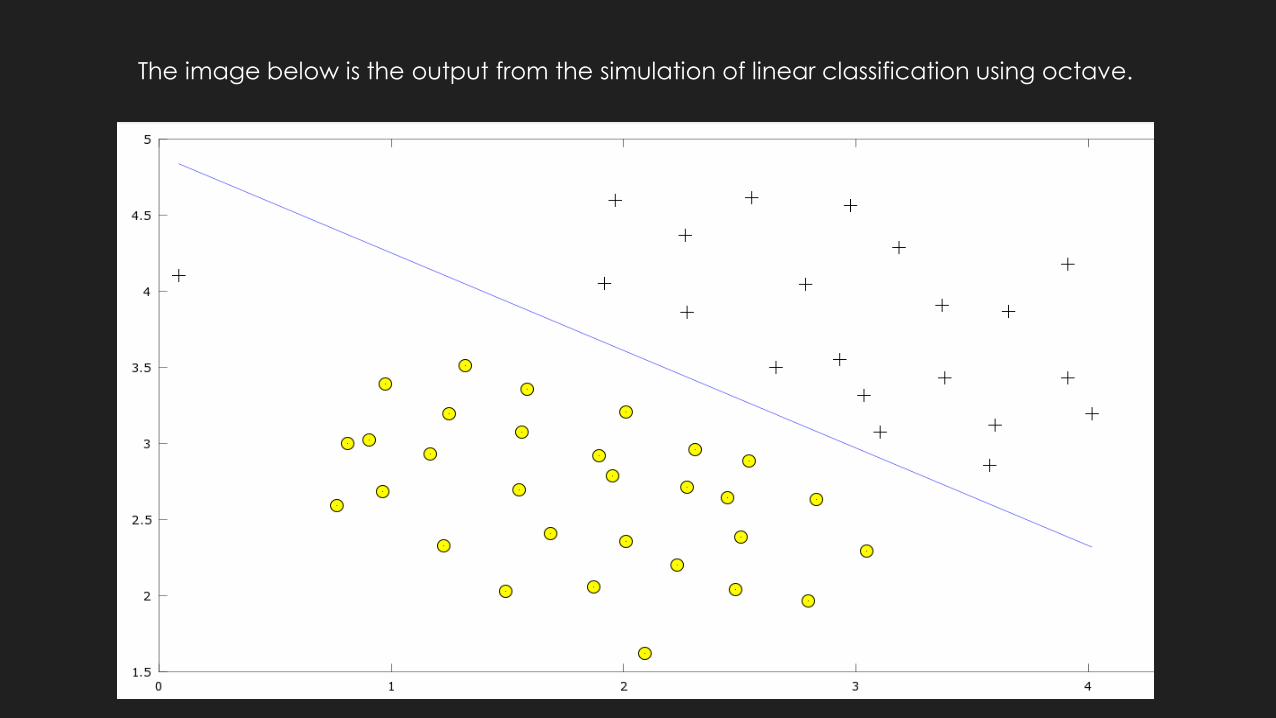
The image below is the output from the simulation of linear classification using octave.
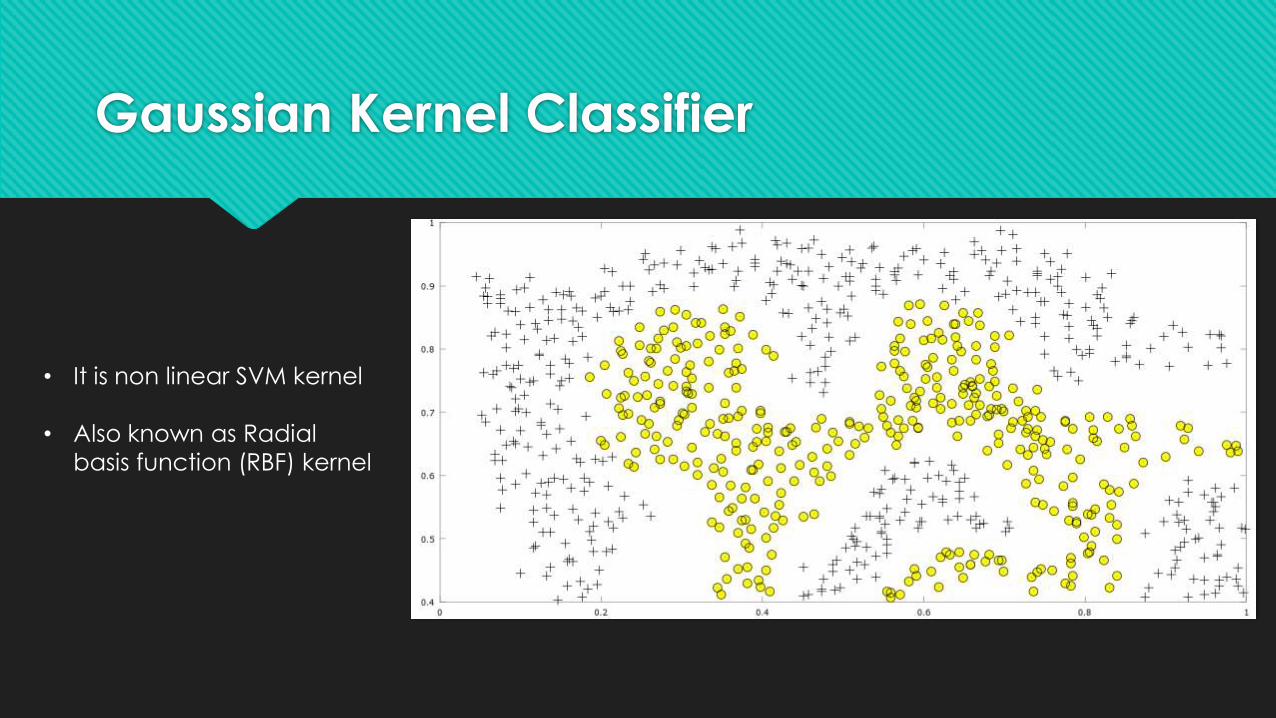
Gaussian Kernel Classifier
• It is non linear SVM kernel
• Also known as Radial
basis function (RBF) kernel

The image beside is the
output from the simulation
of Gaussian classification
using octave.
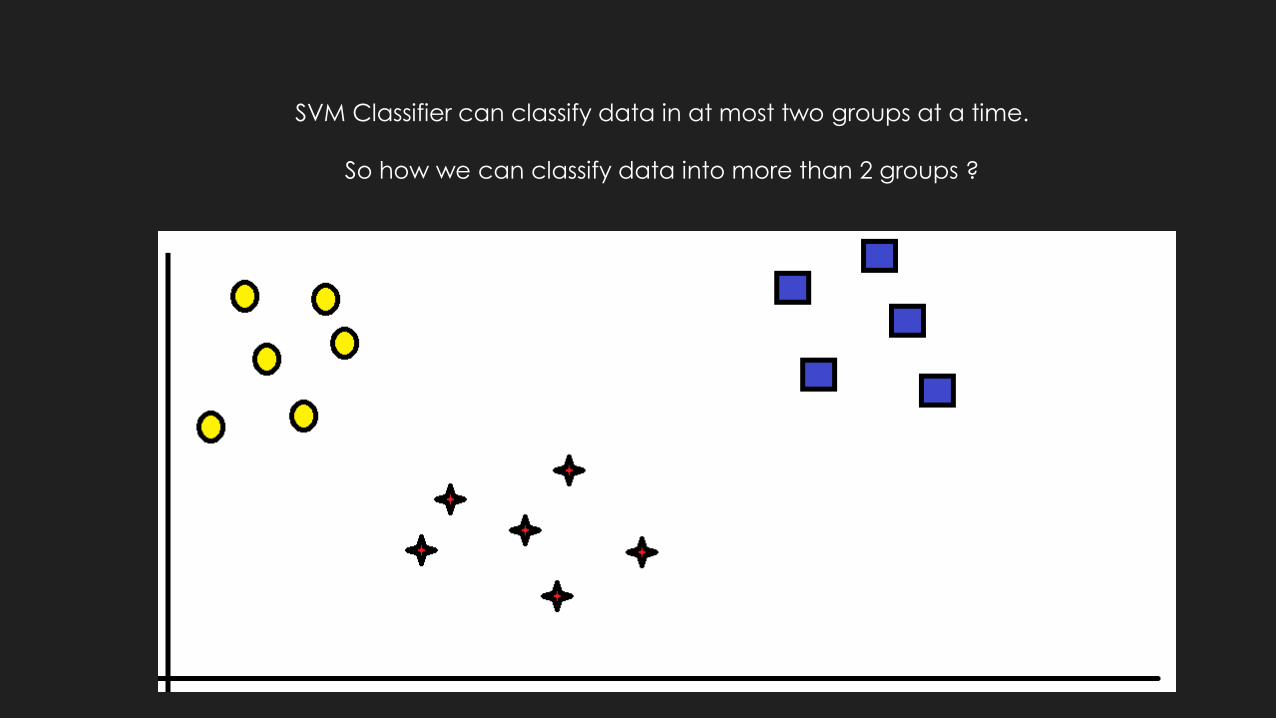
SVM Classifier can classify data in at most two groups at a time.
So how we can classify data into more than 2 groups ?

We can do that by training 3 classifiers , for each group vs all other groups
Group1 vs All
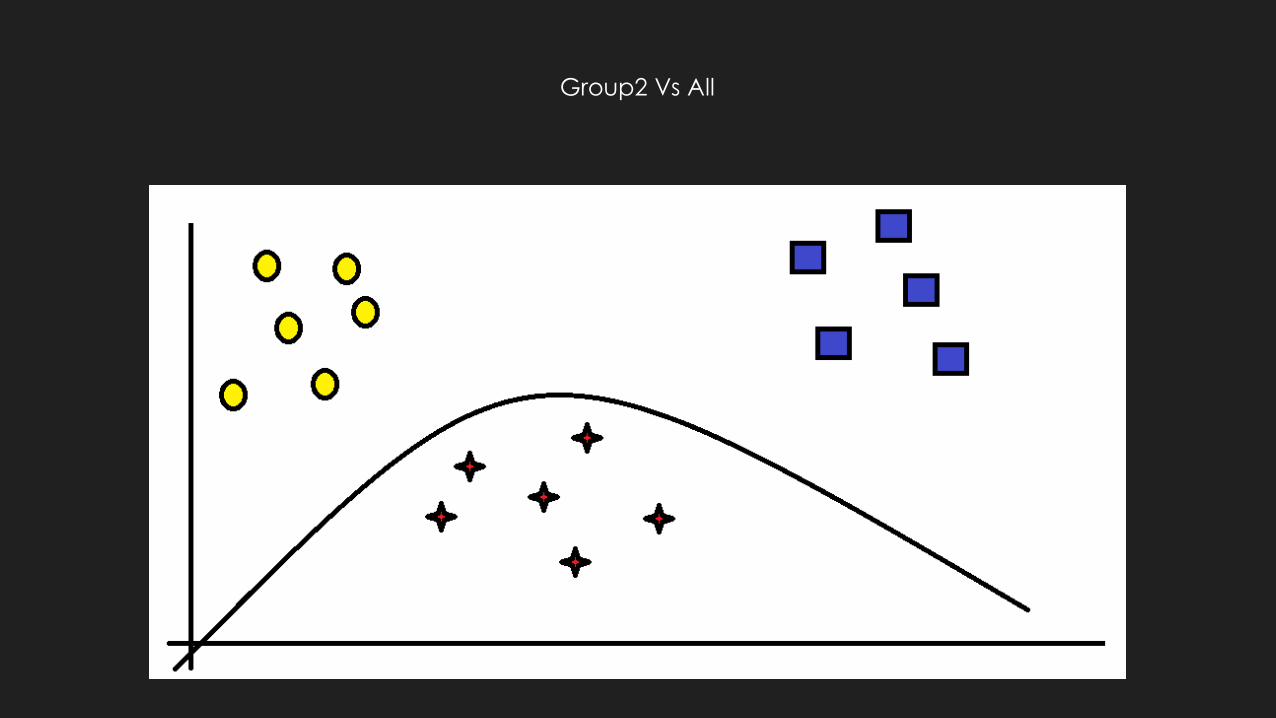
Group2 Vs All
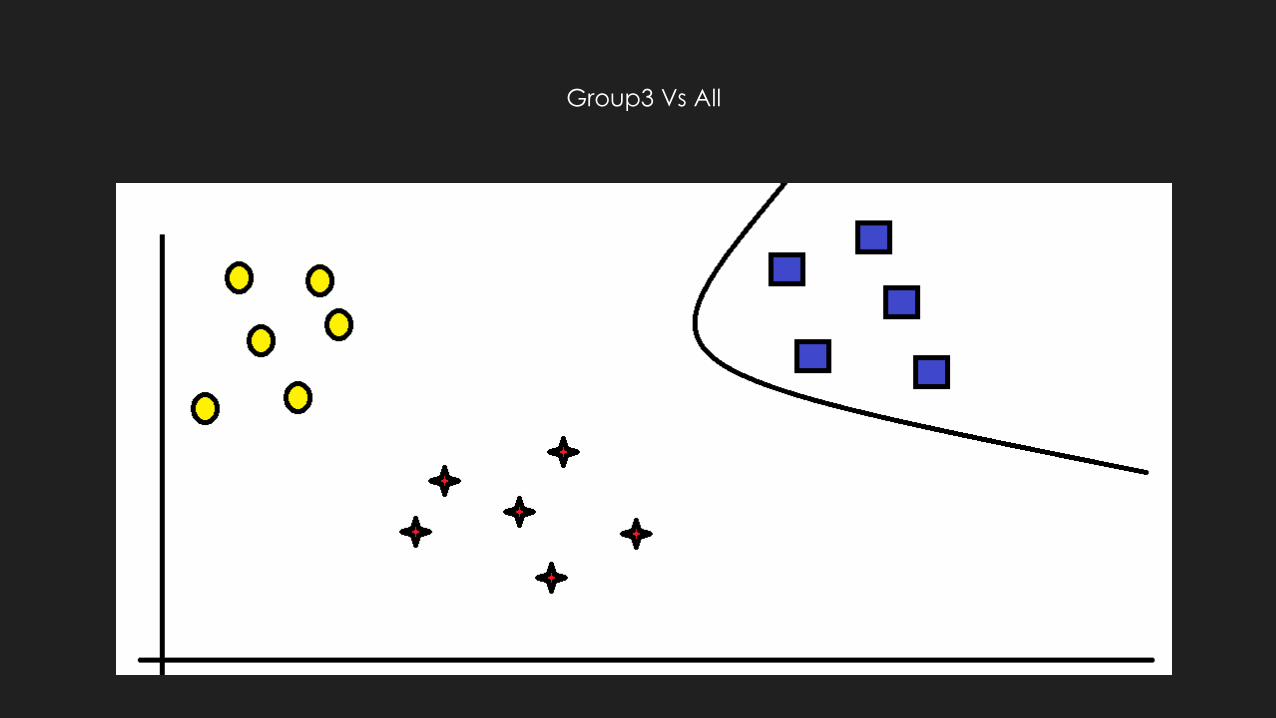
Group3 Vs All

Conclusion
The technique studied in the research project will
aide in improvement in performance and accuracy
of blind source camera identification.
Reference
[1] Mehdi Kharrazi , Husrev T. Sencar and Nasir Memon ,
”Blind Source Camera Identification”.
[2] C.-C. Chang and C.-J. Lin, LIBSVM: a library for support vector
machines, 2001, software available at
http://www.csie.ntu.edu.tw/˜cjlin/libsvm.
[3] Andrew Ng, ”Machine Learning CS-229 Standford”
http://cs229.standford.edu





























