Embed Size (px)
DESCRIPTION
Múltiples sistemas inteligentes
Citation preview

Sistemas Jerárquicos

Sistema jerárquico general
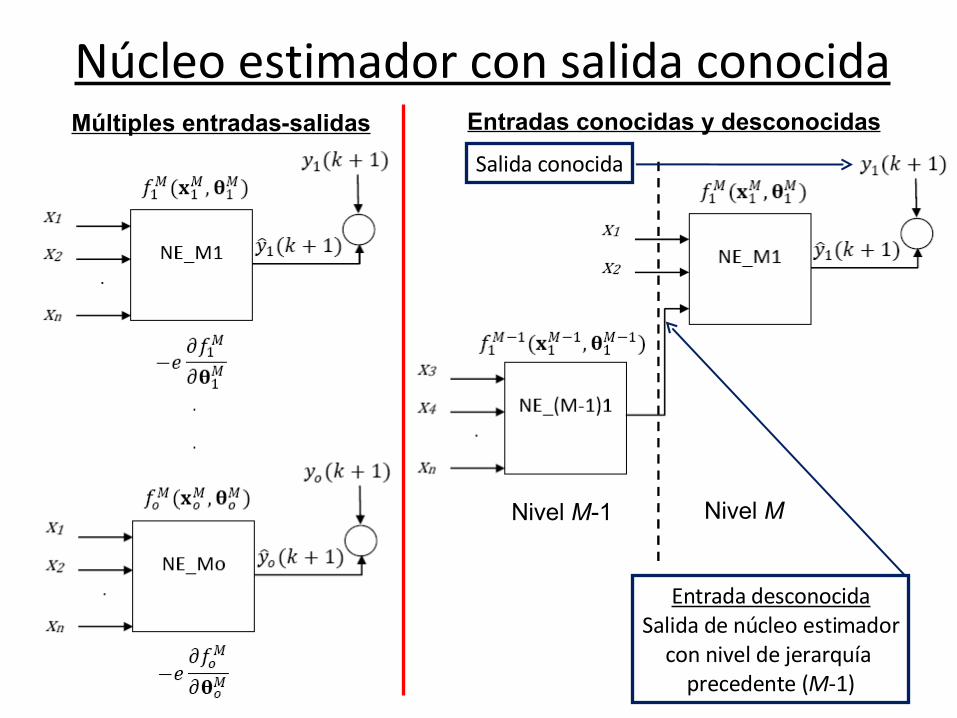
Núcleo estimador con salida conocida
Múltiples entradas-salidas Entradas conocidas y desconocidas
Entrada desconocidaSalida de núcleo estimador
con nivel de jerarquía precedente (M-1)
Nivel M-1 Nivel M
Salida conocida

Núcleo estimador con salida desconocida Entradas conocidas
y desconocidas

Descripción de términos Representación de núcleo estimador
j=1..M Niveles de jerarquía; k=1..P Núcleos en cada nivel
Vector de parámetros
Entradas conocidas y desconocidas
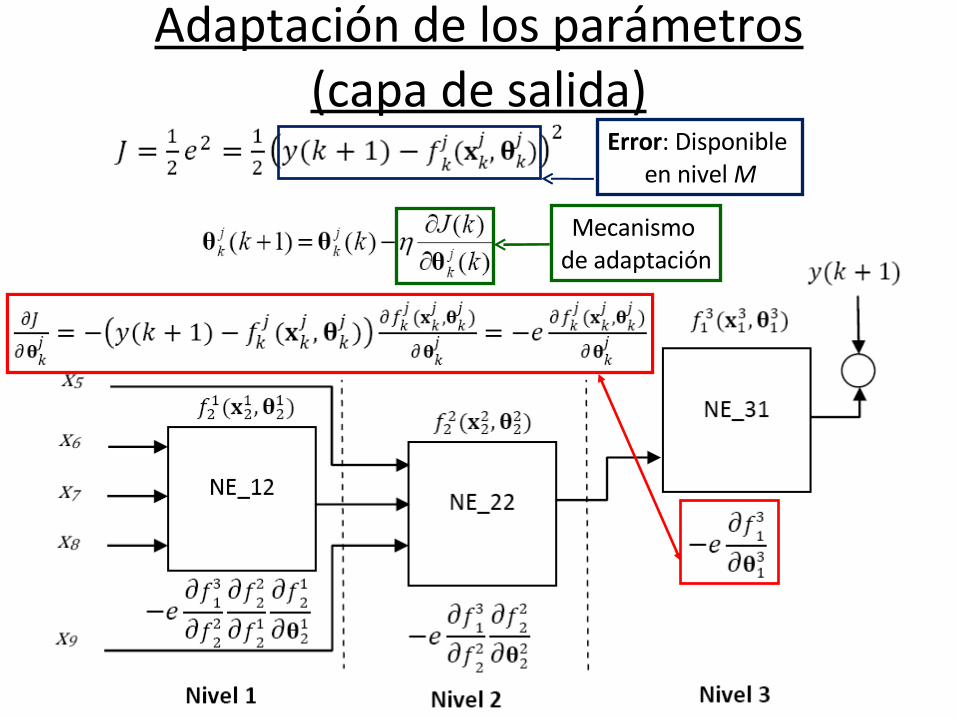
Adaptación de los parámetros(capa de salida)
Mecanismo de adaptación
Error: Disponible en nivel M

Adaptación de los parámetros(capas intermedias)
Mecanismo de adaptación
Retropropagación del error
Diferencial de salida con respecto a parámetros
Diferencial de salida (NE) con respecto a variable de entrada

Ejemplo: Núcleo estimador borroso Parámetros
Variables de entrada
Es necesario obtener el diferencial
con respecto a las variables de entrada
y los parámetros

Adaptación de los parámetros
Descripciónextendida
Centros
Anchos
Consecuentes
Aplicación del gradiente

Diferencial con respecto a las variables de entrada (I)
Descripciónextendida
Resolver el diferencial

Diferencial con respecto a las variables de entrada (II)
Ecuación resultante

Comprobación del diferencial con respecto a las variables de entrada
•Obtener datos de entrada-salida de una función no lineal.
•Determinar la derivada de la función que se pretende modelar.
•Obtener el modelo basado en los datos de entrada-salida.
•Determinar la derivada con respecto a la variable de entrada del núcleo estimador que representa al modelo.
•Comprobar ambas derivadas.

Ejemplo de derivada con respecto a las variables de entrada
Función a modelar Derivada con respecto a x1
)cos(4),(
11
21 xx
xxy

¿Redes Neuronales? Tangente sigmoidal hiperbólica
Función de coste
Diferencial con respecto a los parámetros
De forma similar se determina el diferencial con respecto a la variable de entrada

Pasos generales en el aprendizaje supervisado
[Paso 1] Definir la estructura del modelo y las condiciones iniciales
[Paso 2] Obtener los datos de entrada-salida ( x1, x2, . . .,xn; y )
[Paso 3] Aplicar el núcleo estimador
[Paso 4] Adaptar los parámetros [Paso 5] Determinar la condición de finalización en la obtención del modelo, si este no se cumple, repetir a partir del [Paso 2]
[Paso 6] Aplicar el criterio para validación del modelo. Si los resultados no son los deseados, repetir a partir del [Paso 1]
Sistemas jerárquicos:Condiciones iniciales
1.- Definir las variables de entrada-salida del sistema. Evaluar la conveniencia de normalizar y/o adecuar las variables.
2.- Agrupar las variables que representen determinado “conocimiento”, o brinden información complementaria
3.- Definir los núcleos estimadores, ubicarlos en niveles de jerarquía. a) Definir el método de adaptación paramétrica. b) Determinar el diferencial con respecto a las variables de entrada.
4.- Identificar las variables de entrada conocidas y desconocidas.
5.- Definir los universos de discurso a la salida de los núcleos estimadores.
6.- Definir las condiciones iniciales de los parámetros.
7.- Revisar los pasos para obtener un modelo.

Ejemplos en robótica
Sónares
Infrarrojos
Cámara
Motores
Considerar: Tiempo de adquisición y procesamiento, ubicación espacial, etc.

Sistemas jerárquicos:Obtención del conocimiento (I)
I.- Proyectar el sistema jerárquico hacia adelante: Obtener el valor de todas las variables del sistema
Variables conocidas
Variables desconocidas

Sistemas jerárquicos:Obtención del conocimiento (II)
II.- Calcular el error a la salida y los diferenciales con respecto a las variables de entrada
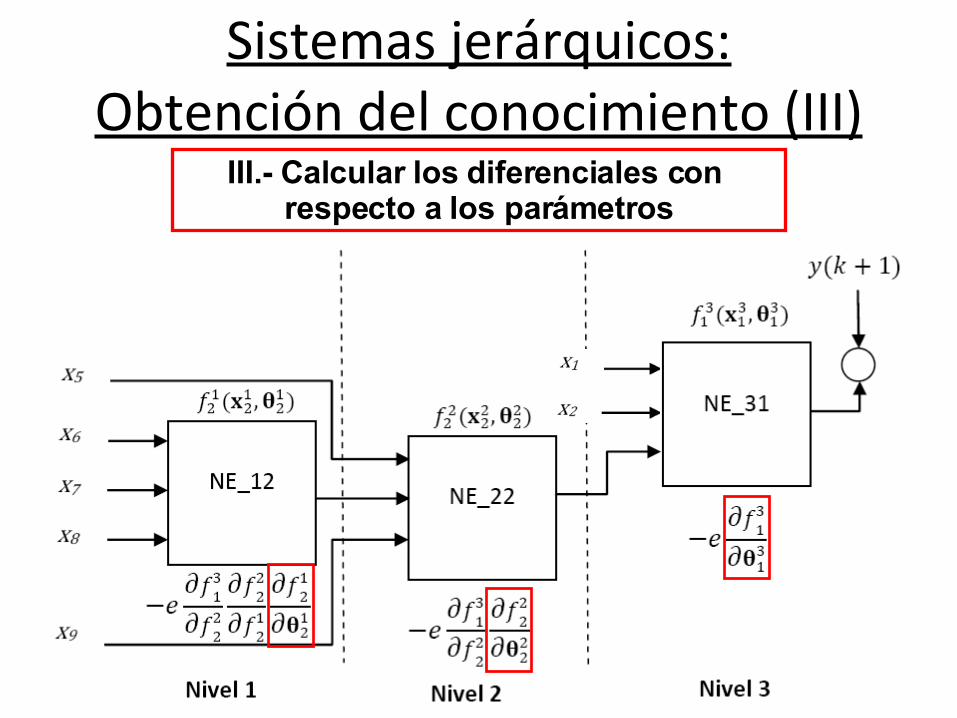
Sistemas jerárquicos:Obtención del conocimiento (III)
III.- Calcular los diferenciales con respecto a los parámetros

Sistemas jerárquicos:Obtención del conocimiento (IV)
IV.- Adaptar los parámetros de los núcleos estimadores

Sistemas jerárquicos:Obtención del conocimiento (V)
V.- Repetir el proceso hasta criterio de parada

Ejemplo: Sistema a modelar Planta III Planta IV
Estímulo Estímulo
Planta VI
Estímulo
Enlace

Combinación de plantas
Planta 3
Planta 4
Planta 6
+
+
31f
32f
4110 f
424 f
61f
1y
2y
6 entradas
5 entradas
4 entradas
Plantas independientes
41311 10 ffy
6142322 4 fffy

Estructura de entrada-salida
))2(),1(),2(),1(,,,(ˆ)( 112264322 kykykykyfky xxx
Sistema21 entradas
)(1 ky
)(2 ky
Se realimentan las nuevasvariables de salida
))2(),1(),2(),1(,,,(ˆ)( 112264311 kykykykyfky xxx

Modelo I: Red Neuronal num_capas=[19 13 2];
net=newff(x,y, num_capas, funcact, 'trainlm', 'learngdm’);
funcact={'tansig' 'tansig' 'tansig'};
0 100 200 300 400 500 600-0.15
-0.1
-0.05
0
0.05
0.1
0.15
0.2
0.25
Muestra
Err
or m
edio
cua
drát
ico
(y1)
0 100 200 300 400 500 600-0.4
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
Muestra
Err
or
medio
cuadr
ático
(y2
)
E
rror
med
io (
y1)
E
rror
med
io (
y2)
Muestra Muestra
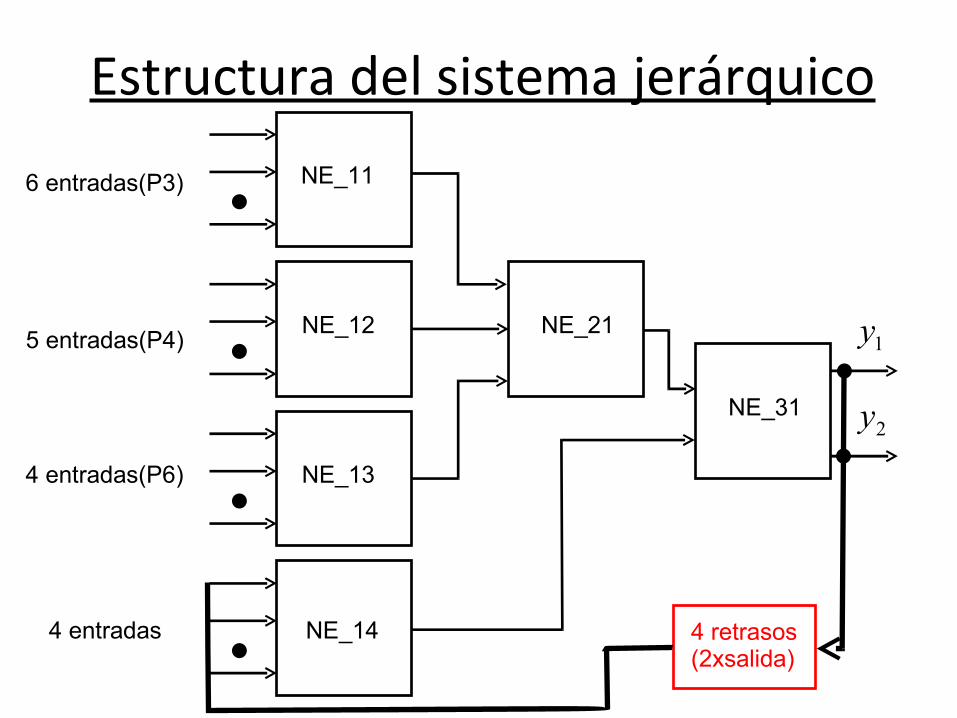
Estructura del sistema jerárquico
NE_11
NE_121y
2y
6 entradas(P3)
5 entradas(P4)
4 entradas(P6) NE_13
NE_14
NE_21
NE_31
4 retrasos(2xsalida)
4 entradas

Características de los sistemas borrosos
Número de reglas con que se modeló cada planta independiente
Planta 3: 13 reglasPlanta 4: 19 reglasPlanta 6: 19 reglas
Los núcleos estimadores borrosos se definen de la siguiente forma
NE_11: 11 reglasNE_12: 15 reglasNE_13: 15 reglasNE_14: 13 reglasNE_21: 17 reglasNE_31: 13 reglas
Diferenciales con respecto a las variables de entrada

Modelo II: Sistema jerárquico
0 100 200 300 400 500 600-0.08
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
E
rror
med
io (
y1)
Muestra
0 100 200 300 400 500 600-0.3
-0.25
-0.2
-0.15
-0.1
-0.05
0
0.05
0.1
0.15
E
rror
med
io (
y2)
Muestra





























