Embed Size (px)
Citation preview
Agenda
1) Programación Paralela
2) Optimización
3) Algoritmos
Arquitecturas paralelas
● Procesadores multi-núcleo
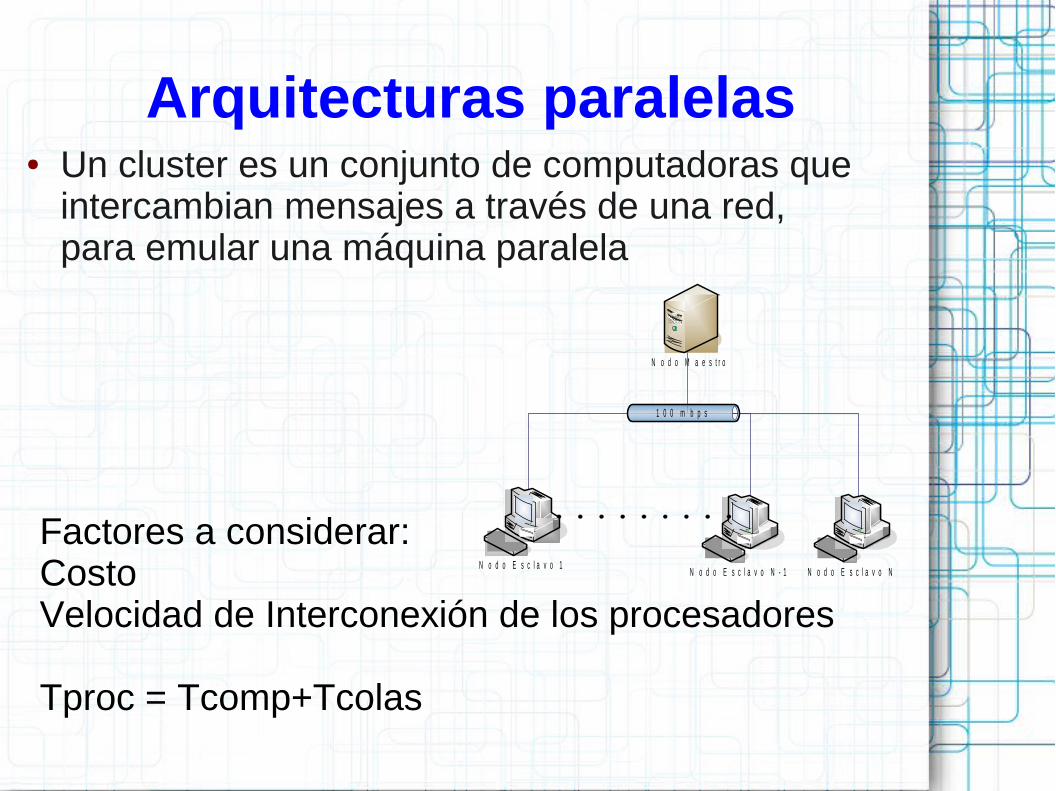
Arquitecturas paralelas● Un cluster es un conjunto de computadoras que
intercambian mensajes a través de una red, para emular una máquina paralela
Factores a considerar:CostoVelocidad de Interconexión de los procesadores
Tproc = Tcomp+Tcolas
N o d o M a e s t r o
1 0 0 m b p s
`
N o d o E s c l a v o 1
`
N o d o E s c l a v o N - 1
`
N o d o E s c l a v o N
Arquitecturas paralelas
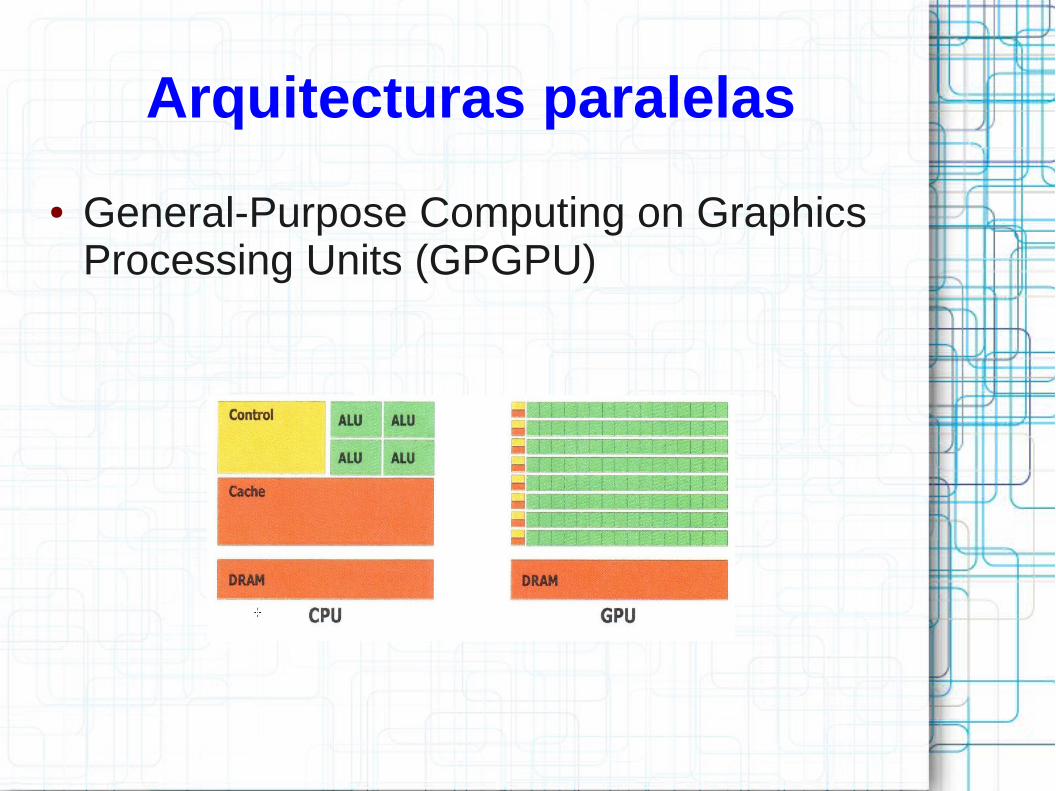
● General-Purpose Computing on Graphics Processing Units (GPGPU)
Programación paralela (conceptos)
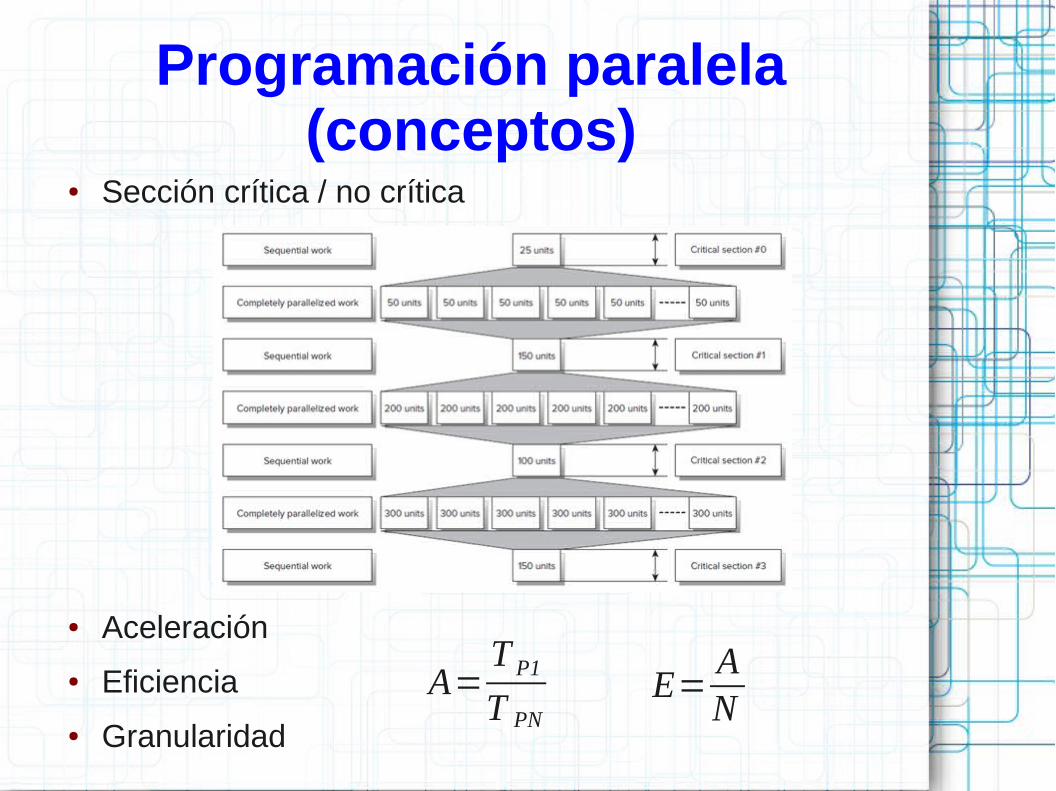
● Sección crítica / no crítica
● Aceleración
● Eficiencia
● Granularidad
A=T P1
T PNE=
AN
¿Qué es Linux?
● Linux es un Kernel
● Con licencia GPL v2
● Monolítico
● Más de 13 millones de líneas de código
● Versión actual 3.7
● Altamente portable DEC Alpha, ARM, AVR32, Blackfin, ETRAX CRIS, FR-V, H8, IA64, M32R, m68k, MicroBlaze, MIPS, MN10300, PA-RISC, PowerPC, System/390, SuperH, SPARC, x86, x86 64 y Xtensa
● Escrito en lenguaje C, junto a unas pequeñas secciones de código escritas en lenguaje ensamblador.

¿Qué es una distribución?
● Es un conjunto de utilerías que permiten instalar fácilmente un kernel con una serie de paquetes.
● También se conocen como distros
● Algunas se basan enFreeBSD y muchas en Linux
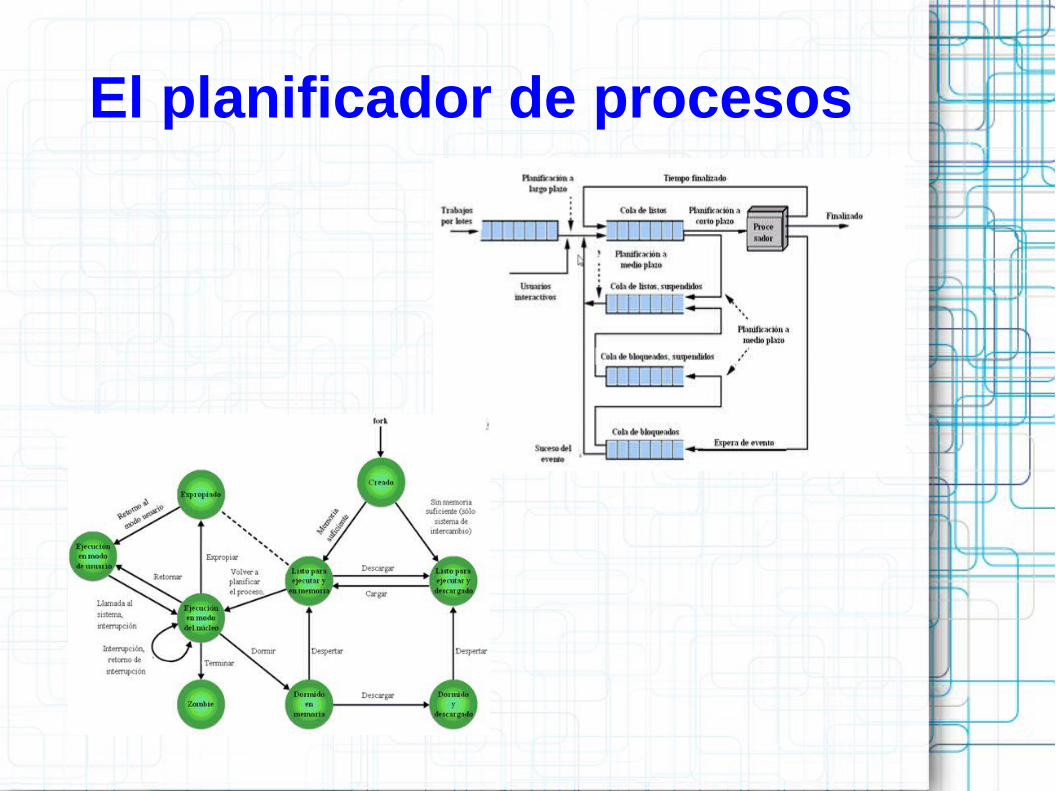
El planificador de procesos
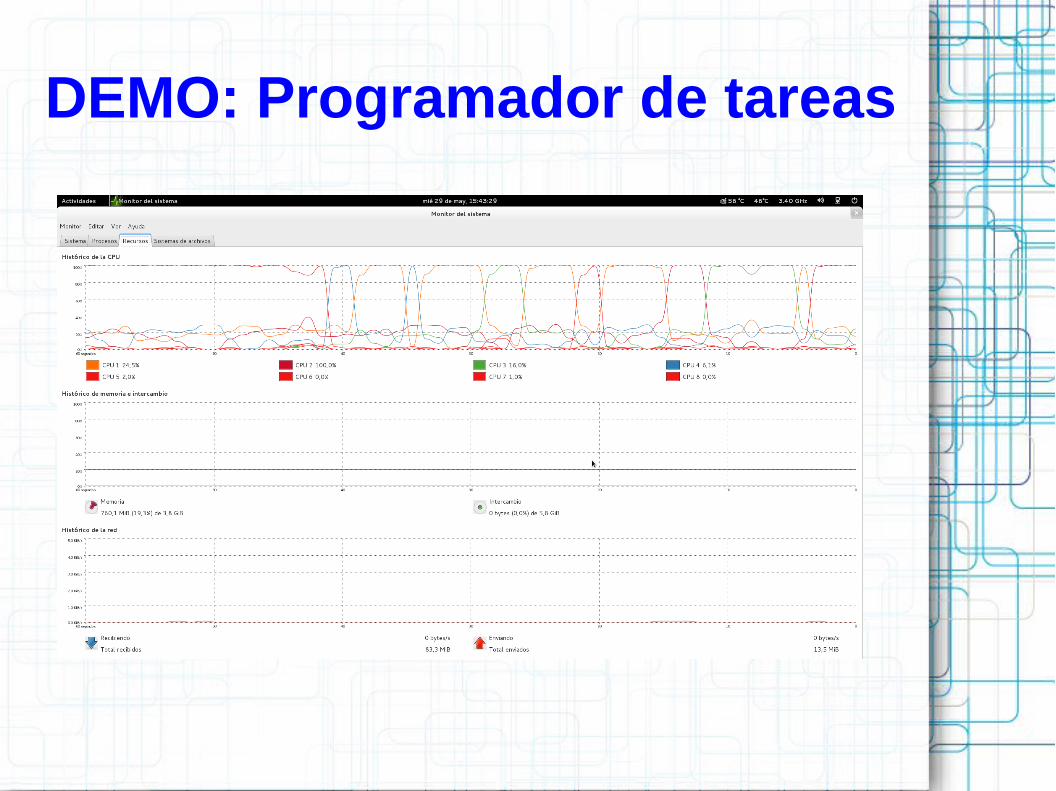
DEMO: Programador de tareas
Programación paralela (herramientas)
● Procesadores multinúcleo
– fork()
– OpenMP
– pthreads● Clusters
– PVM
– MPI● GPGPU
– OpenCL
– CUDA
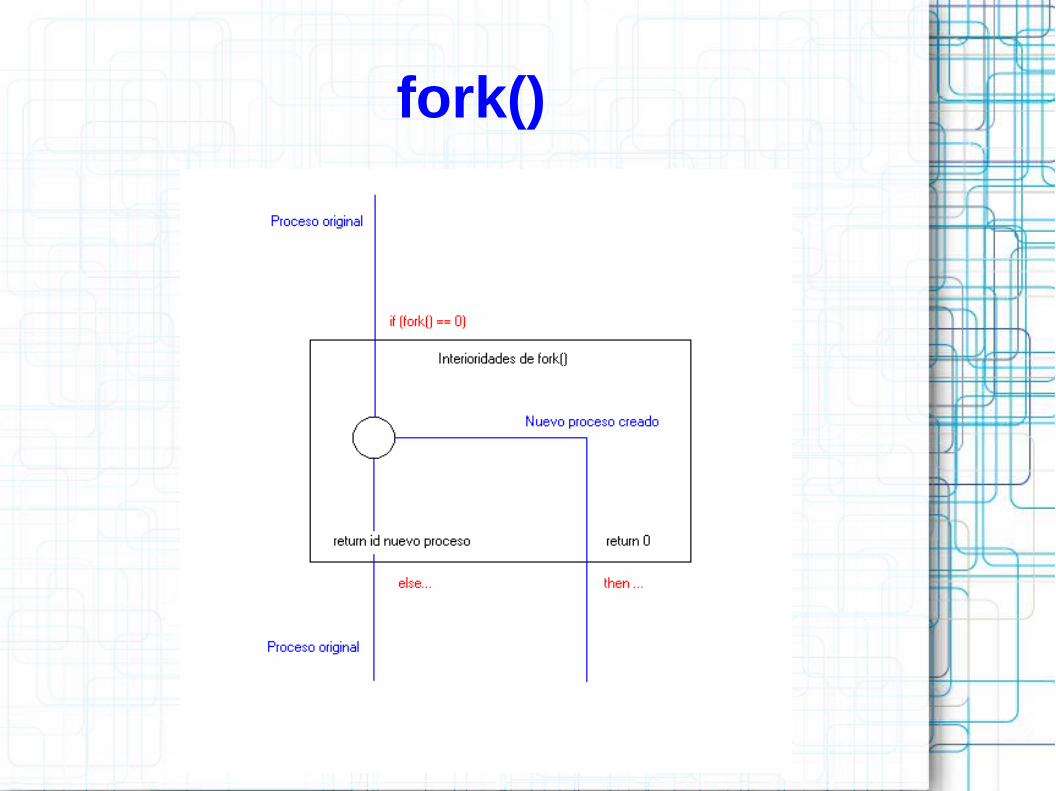
fork()

pthreads
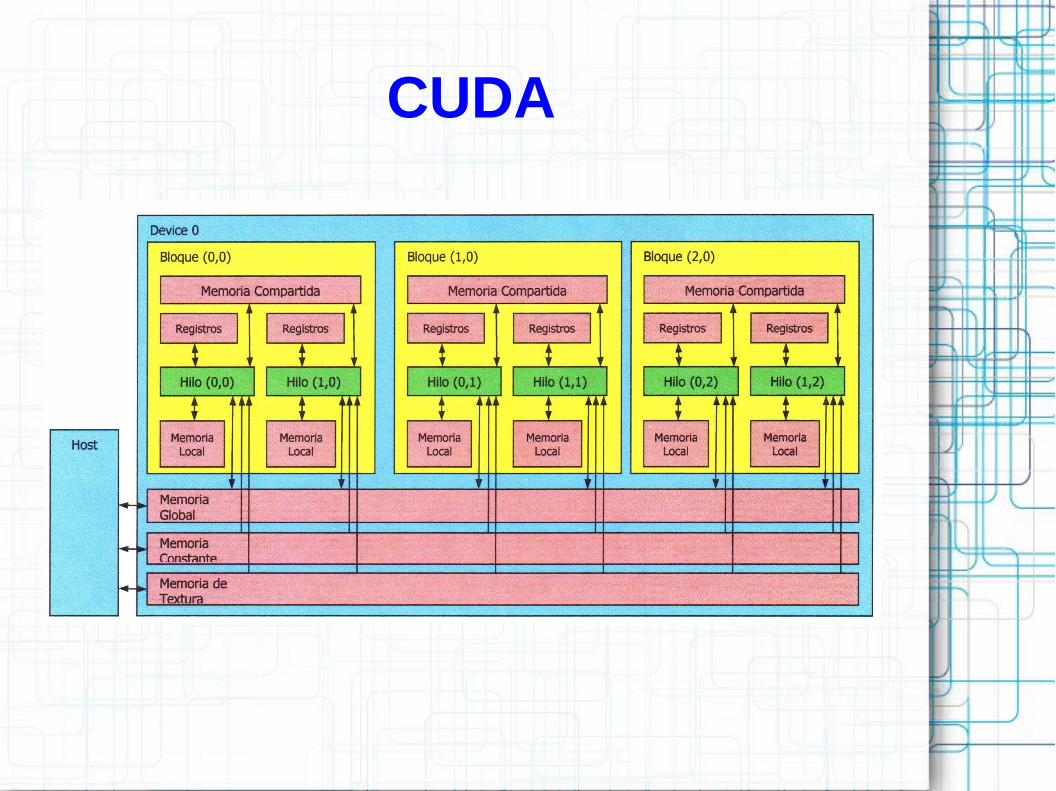
CUDA
Optimización en espacios contínuos
f ( X ):ℜn→ℜ
Xo∈ℜ∣f ( Xo)≤f ( X )∀ X∈ℜ
● minimización:
f ( X ):ℜn→ℜ
Xo∈ℜ∣f ( Xo
)≥f ( X )∀ X∈ℜ
● maximización:
min( f ( X ))
max ( f ( X ))
● equivalencia:
min( f ( X ))=max (−f ( X ))
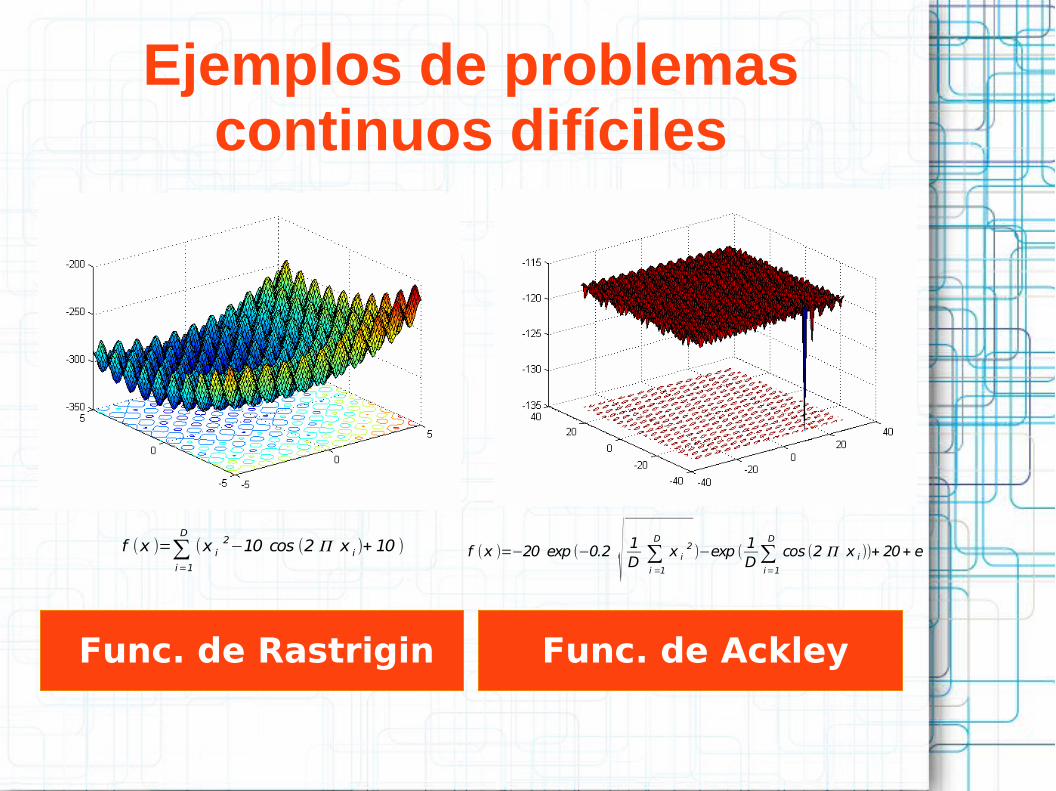
Ejemplos de problemas continuos difíciles
Func. de Rastrigin Func. de Ackley
f (x )=D
∑i=1
(x i2−10 cos (2 Π x i )+ 10 ) f (x )=−20 exp (−0.2 √ 1D
D
∑i =1
x i2)−exp (
1D
D
∑i=1
cos (2 Π x i ))+ 20+ e
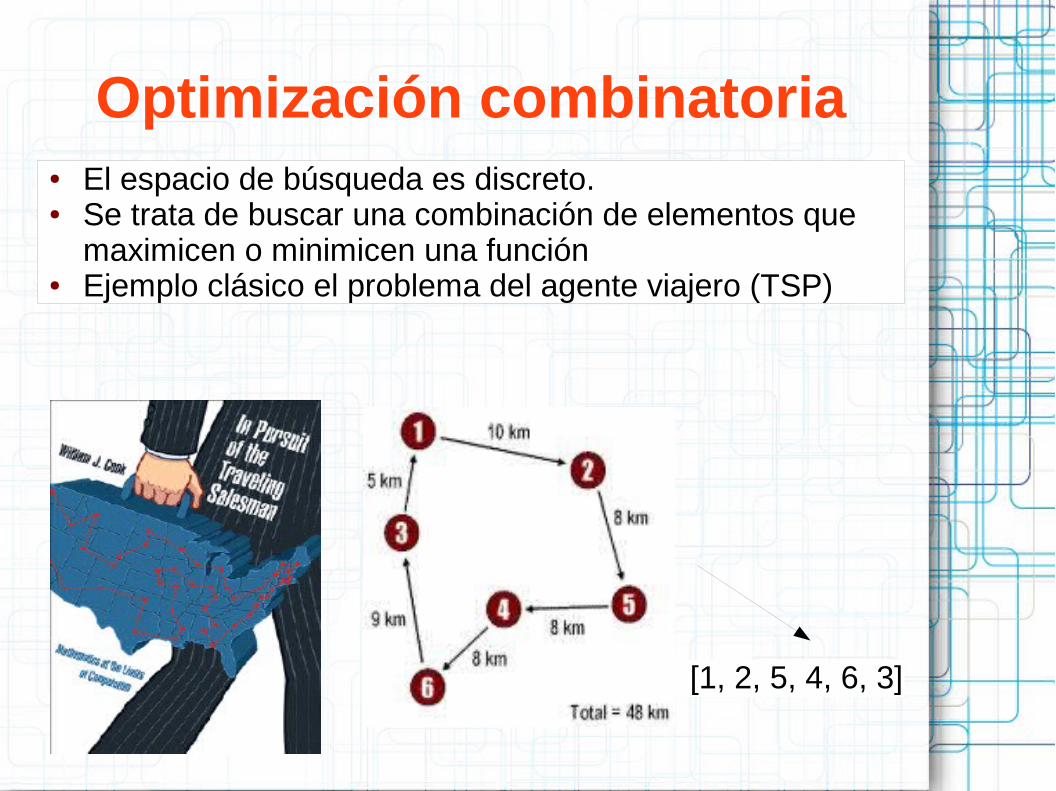
Optimización combinatoria● El espacio de búsqueda es discreto.● Se trata de buscar una combinación de elementos que
maximicen o minimicen una función● Ejemplo clásico el problema del agente viajero (TSP)
[1, 2, 5, 4, 6, 3]
Complejidad● Problemas P, NP, NP completo.
Complejidad:● Constante (la mejor y objetivo a buscar) O(1)● Logarítmica (muy buena) O(log n)● Lineal O(n)● Lineal*logarítmica O(n log n)● Cuadrática O(n2)● Polinomial (mala) O(na) con a>2● Exponencial (muy mala) O(an) con a>2● Factorial (la peor) O(n!)
TSP● Cantidad de permutaciones de tamaño n = n!● Por ejemplo con 13 ciudades: ● 13! = 6,227'020,800

DEMO TIME!

Algoritmos Genéticos
AG
John H. Holland “Adaptación en Sistemas Naturales y Artificiales” (1975) Universidad de Michigan
Inspirados en:Evolución natural de poblaciones.Darwin (supervivencia del más apto).Mendel, (transferencia de información genéti-ca).
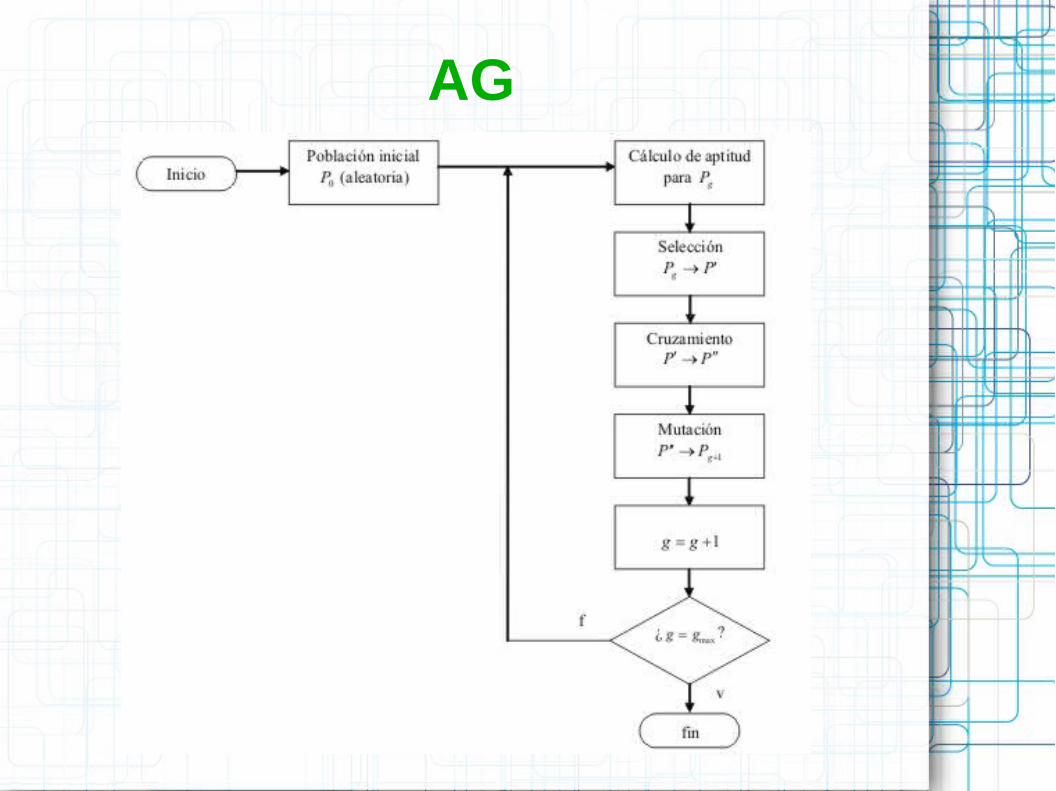
AG

DEMO TIME!
Particle Swarm Optimization.
PSO
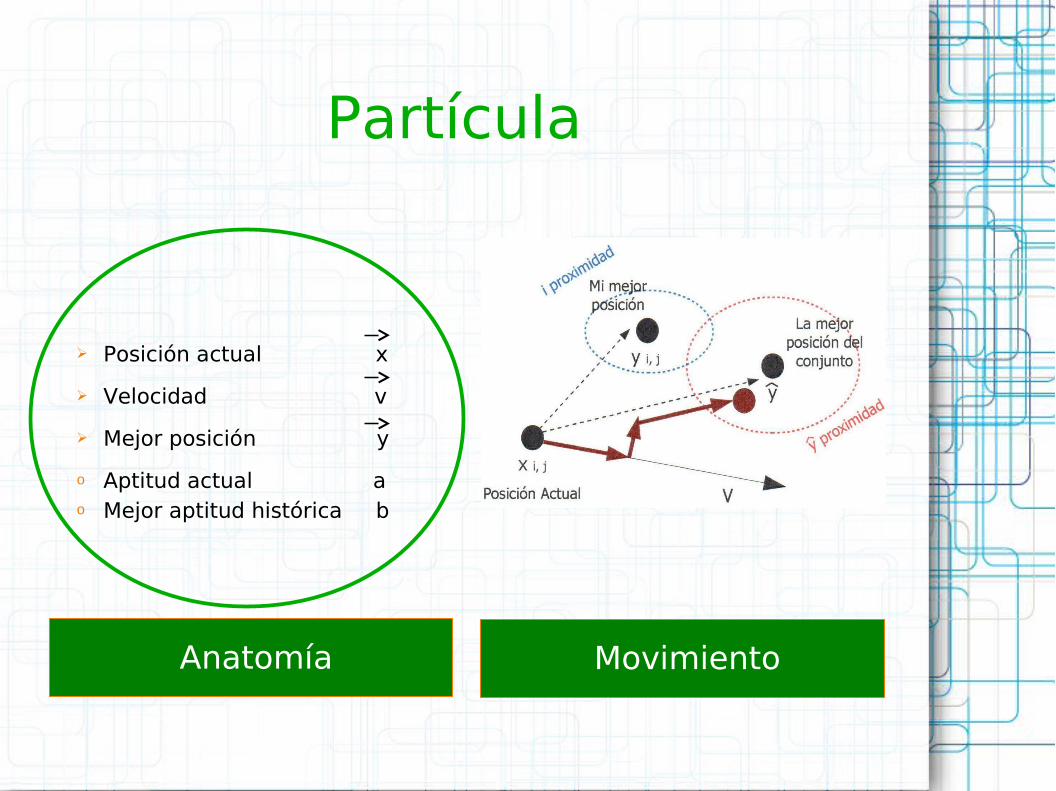
Anatomía Movimiento
Posición actual x
Velocidad v
Mejor posición y
o Aptitud actual ao Mejor aptitud histórica b
Partícula
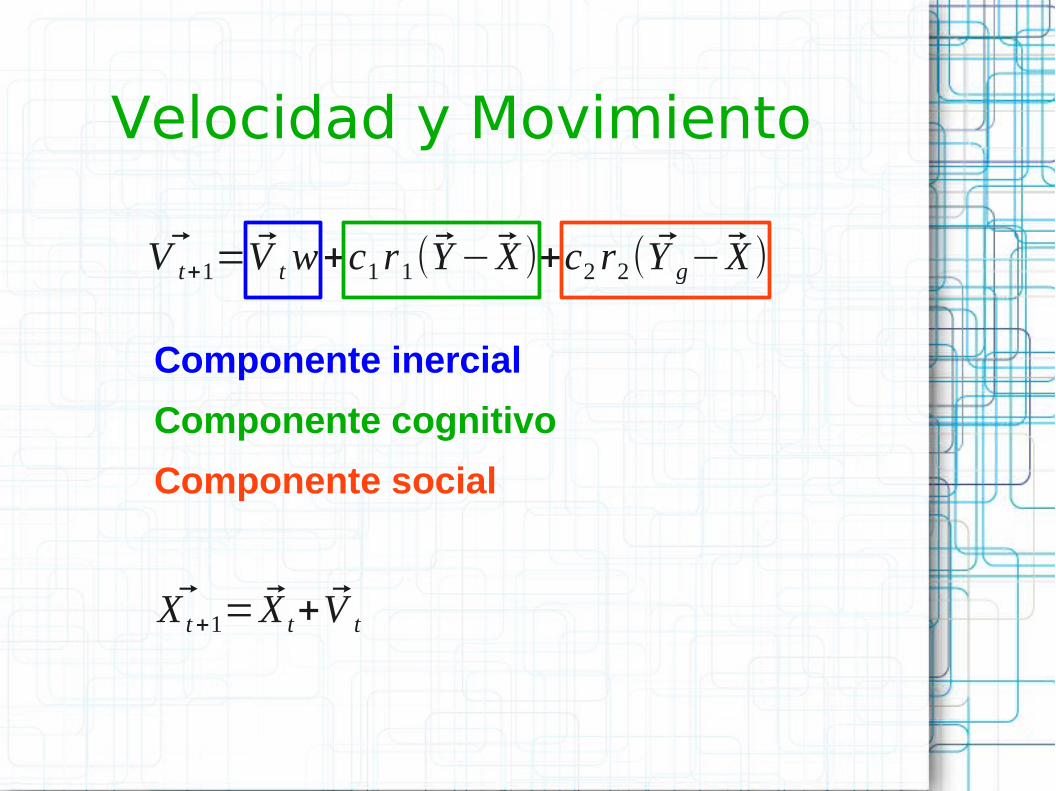
Velocidad y Movimiento
V t+1=V t w+c1r1(Y− X )+c2 r2(Y g− X )
X t+1= X t+V t
Componente inercial
Componente cognitivo
Componente social

ÚLTIMA DEMO