Embed Size (px)
Citation preview
.
.
Centre of Gravity
&
Moment of Inertia
Course :- Diploma Engineering
Sub :- Engineering Mechanics
Unit :- IV
Concept of Gravity
• Gravity is a physical phenomenon, specifically the
mutual attraction between all objects in the universe.
• In a gaming setting, gravity determines the
relationship between the player and the "ground,"
preventing the player or game objects from flying off
into space, and hopefully acting in a
predictable/realistic manner.
• Gravity is the weakest of the four fundamental forces,
yet it is the dominant force in the universe for shaping
the large scale structure of galaxies, stars, etc.

• The gravitational force between two masses m1 and
m2 is given by the relationship:
• This is often called the "universal law of gravitation"
and G the universal gravitation constant.
• It is an example of an inverse square law force. The
force is always attractive and acts along the line
joining the centers of mass of the two masses. The
forces on the two masses are equal in size but
opposite in direction, obeying Newton's third law.
2211-
2
21 /106.67G re whe kgNmr
mGmFgravity

Gravitational Force
• Newton's law of universal gravitation states that
every point mass in the universe attracts every
other point mass with a force that is directly
proportional to the product of their masses and
inversely proportional to the square of the distance
between them.
• This is a general physical law derived from empirical
observations by what Newton called induction.
• It is a part of classical mechanics and was formulated
in Newton's work Philosophiæ Naturalis Principia
Mathematica ("the Principia"), first published on 5
July 1687.

• In modern language, the law states the following:
• Every point mass attracts every single other point
mass by a force pointing along the line intersecting
both points. The force is proportional to the product
of the two masses and inversely proportional to the
square of the distance between them:
where:
• F is the force between the masses,
• G is the gravitational constant,
• m1 is the first mass,
• m2 is the second mass, and
• r is the distance between the centers of the masses.
2
21
r
mmGF

Centroid and Center of Gravity
• In general when a rigid body lies in a field of force
acts on each particle of the body. We equivalently
represent the system of forces by single force acting
at a specific point.
• This point is known as centre of gravity.
• Various such parameters include centre of gravity,
moment of inertia, centroid , first and second moment
of inertias of a line or a rigid body. These parameters
simplify the analysis of structures such as beams.
Further we will also study the surface area or volume
of revolution of a line or area respectively.

Centre of Gravity
• Consider the following lamina. Let’s assume that it hasbeen exposed to gravitational field.
• Obviously every single element will experience agravitational force towards the centre of earth.
• Further let’s assume the body has practical dimensions,then we can easily conclude that all elementary forceswill be unidirectional and parallel.
• Consider G to be the centroid of the irregular lamina.As shown in first figure we can easily represent the netforce passing through the single point G.
• We can also divide the entire region into let’s say nsmall elements. Let’s say the coordinates to be (x1,y1),(x2,y2), (x3,y3)……….(xn,yn) as shown in figure.
• Let ΔW1, ΔW2, ΔW3,……., ΔWn be the elementary
forces acting on the elementary elements
• Clearly, W =ΔW1+ ΔW2+ΔW3 +…………..+ ΔWn
• When n tends to infinity ΔW becomes infinitesimally
small and can be replaced as dW. Centre of gravity :
Cenroids of Areas and Lines
• We have seen one method to find out the centre of
gravity, there are other ways too. Let’s consider
plate of uniform thickness and a homogenous
density.
• Now weight of small element is directly
proportional to its thickness, area and density as:
• ΔW = δt dA.
• Where δ is the density per unit volume, t is the
thickness , dA is the area of the small element.
Centroid for Regular Lamina And
Center of Gravity for Regular Solids
• Plumb line method
• The centroid of a uniform planar lamina, such as (a)below, may be determined, experimentally, by using aplumb line and a pin to find the center of mass of a thinbody of uniform density having the same shape.
• The body is held by the pin inserted at a point near thebody's perimeter, in such a way that it can freely rotatearound the pin; and the plumb line is dropped from thepin. (b).
• The position of the plumb line is traced on the body.The experiment is repeated with the pin inserted at adifferent point of the object. The intersection of the twolines is the centroid of the figure (c).

• This method can be extended (in theory) to concave
shapes where the centroid lies outside the shape, and
to solids (of uniform density), but the positions of the
plumb lines need to be recorded by means other than
drawing.
1

• Balancing method
• For convex two-dimensional shapes, the centroidcan be found by balancing the shape on a smallershape, such as the top of a narrow cylinder.
• The centroid occurs somewhere within the rangeof contact between the two shapes.
• In principle, progressively narrower cylinders canbe used to find the centroid to arbitrary accuracy.In practice air currents make this unfeasible.
• However, by marking the overlap range frommultiple balances, one can achieve a considerablelevel of accuracy.
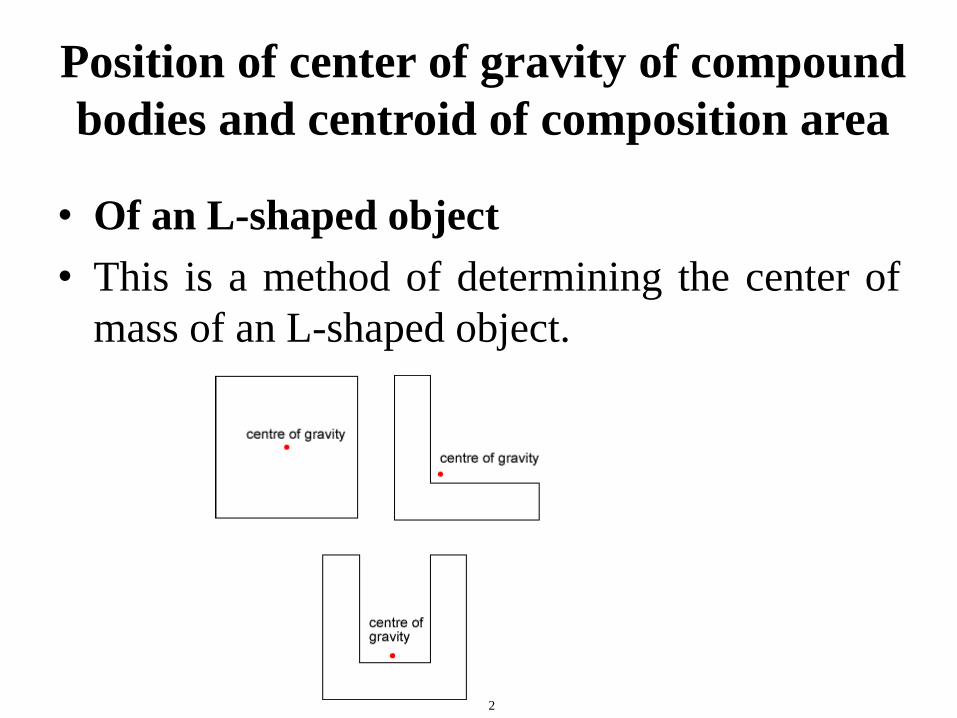
Position of center of gravity of compound
bodies and centroid of composition area
• Of an L-shaped object
• This is a method of determining the center of
mass of an L-shaped object.
2

• 1. Divide the shape into two rectangles. Find the
center of masses of these two rectangles by drawing
the diagonals. Draw a line joining the centers of mass.
The center of mass of the shape must lie on this line
AB.
• 2. Divide the shape into two other rectangles, as
shown in fig 3. Find the centers of mass of these two
rectangles by drawing the diagonals. Draw a line
joining the centers of mass. The center of mass of the
L-shape must lie on this line CD.
• 3. As the center of mass of the shape must lie along
AB and also along CD, it is obvious that it is at the
intersection of these two lines, at O. (The point O
may or may not lie inside the L-shaped object.)

• Of a composite shape
• This method is useful when one wishes to find the
location of the centroid or center of mass of an object
that is easily divided into elementary shapes, whose
centers of mass are easy to find (see List of centroid).
• Here the center of mass will only be found in the x
direction. The same procedure may be followed to
locate the center of mass in the y direction.
Centroids of Composite Areas
• We can end up in situations where the given plate can
be broken up into various segments. In such cases we
can replace the separate sections by their centre of
gravity.
• One centroid takes care of the entire weight of the
section. Further overall centre of gravity can be found
out using the same concept we studied before.
• Xc (W1 + W2 + W3+…..+Wn) = xc1W1 + xc2W2 +
xc3W3+…….……..+xcnWn
• Yc (W1 + W2 + W3+…..+Wn) = yc1W1 + yc2W2 +
yc3W3+…….……..+ycnWn
• Once again if the plate is homogenous and of uniformthickness, centre of gravity turns out to be equal to thecentroid of the area. In a similar way we can also definecentroid of this composite area by:
• Xc (A1 + A2 + A3+…..+An) = xc1A1 + xc2A2 +xc3A3+…….……..+xcnAn
• Yc (A1 + A2 + A3+…..+An) = yc1A1 + yc2A2 +yc3A3+…….……..+ycnAn
• We can also introduce the concept of negative area. Itsimply denotes the region where any area is left vacant.We will see its usage in the coming problems.
CG of Bodies with Portions Removed
• Rigid body is composed of very large numbers ofparticles. Mass of rigid body is distributed closely.
• Thus, the distribution of mass can be treated ascontinuous. The mathematical expression for rigidbody, therefore, is modified involving integration. Theintegral expressions of the components of position ofCOM in three mutually perpendicular directions are :
• Note that the term in the numerator of the expression isnothing but the product of the mass of particle likesmall volumetric element and its distance from theorigin along the axis. Evidently, this terms whenintegrated is equal to sum of all such products of masselements constituting the rigid body.
• Symmetry and COM of rigid body
• Evaluation of the integrals for determining COM is very
difficult for irregularly shaped bodies.
• On the other hand, symmetry plays important role in
determining COM of a regularly shaped rigid body. There
are certain simplifying facts about symmetry and COM :
1. If symmetry is about a point, then COM lies on that
point. For example, COM of a spherical ball of
uniform density is its center.
2. If symmetry is about a line, then COM lies on that
line. For example, COM of a cone of uniform density
lies on cone axis.
3. If symmetry is about a plane, then COM lies on that
plane. For example, COM of a cricket bat lies on the
central plane.

Moment of Inertia
• What is a Moment of Inertia?
• It is a measure of an object’s resistance to changes
to its rotation.
• Also defined as the capacity of a cross-section to
resist bending.
• It must be specified with respect to a chosen axis
of rotation.
• It is usually quantified in m4 or kgm2.

• Perpendicular Axis Theorem
• The moment of inertia (MI) of a plane area
about an axis normal to the plane is equal to
the sum of the moments of inertia about any
two mutually perpendicular axes lying in the
plane and passing through the given axis.
• That means the Moment of Inertia
Iz = Ix+Iy.
• Parallel Axis Theorem
• The moment of area of an object about any axis parallel to the centroidal axis is the sum of MI about its centroidal axis and the prodcut of area with the square of distance of from the reference axis.
• Essentially,
• A is the cross-sectional area. d is the perpendicular distance between the centroidal axis and the parallel axis.
2
Gxx AdII

• Parallel Axis Theorem – Derivation
• Consider the moment of inertia Ix of an area A
with respect to an axis AA’. Denote by y, the
distance from an element of area dA toAA’.
AyI 2
x d
3
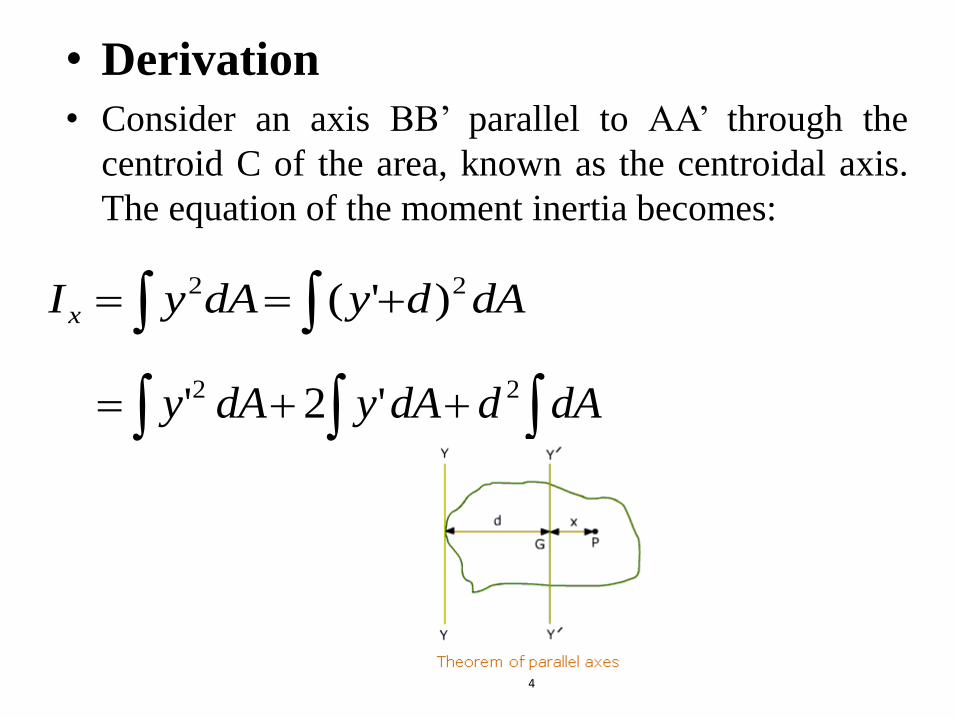
• Derivation
• Consider an axis BB’ parallel to AA’ through the
centroid C of the area, known as the centroidal axis.
The equation of the moment inertia becomes:
dAddAydAy 22 '2'
dAdydAyIx
22 )'(
4
Derivation
• Modify the equation obtained with the parallel
axis theorem:

Radius of Gyration of an Area
• The radius of gyration of an area A with respect to
the x axis is defined as the distance kx, where Ix
= kx A. With similar definitions for the radii of
gyration of A with respect to the y axis and with
respect to O, we have
5
IMAGE REFERENCES
Sr. No. Source/Links
1
2
4
3
5
http://www.wonderwhizkids.com/resources/content/images/3201.jpg
http://nrich.maths.org/content/id/2742/cog3.gif
http://images.tutorvista.com/content/rigid-body/parallel-axes-theorem.gif
http://images.tutorvista.com/content/rigid-body/parallel-axes-theorem.gif
http://www.transtutors.com/Uploadfile/CMS_Images/21994_Moment%20of%20inertia%20of%20a%20circular%20section.JPG
CONTENT REFERENCES
A TEXT BOOK OF ENGINEERING MECHANICS , R.S.KHURMI , S.CHAND & COMPANY PVT. LTD.A TEXT BOOK OF ENGINEERING MECHANICS , Dr. R.K.BANSAL , LAXMI PUBLICATION

Any
Question??

Thank
You





























