7/18/05 Princeton Elasticity Lectures
Nonlinear Elasticity
7/18/05 Princeton Elasticity Lectures
Outline
• Some basics of nonlinear elasticity• Nonlinear elasticity of biopolymer
networks• Nematic elastomers
7/18/05 Princeton Elasticity Lectures
What is Elasticity
• Description of distortions of rigid bodies and the energy, forces, and fluctuations arising from these distortions.
• Describes mechanics of extended bodies from the macroscopic to the microscopic, from bridges to the cytoskeleton.
7/18/05 Princeton Elasticity Lectures
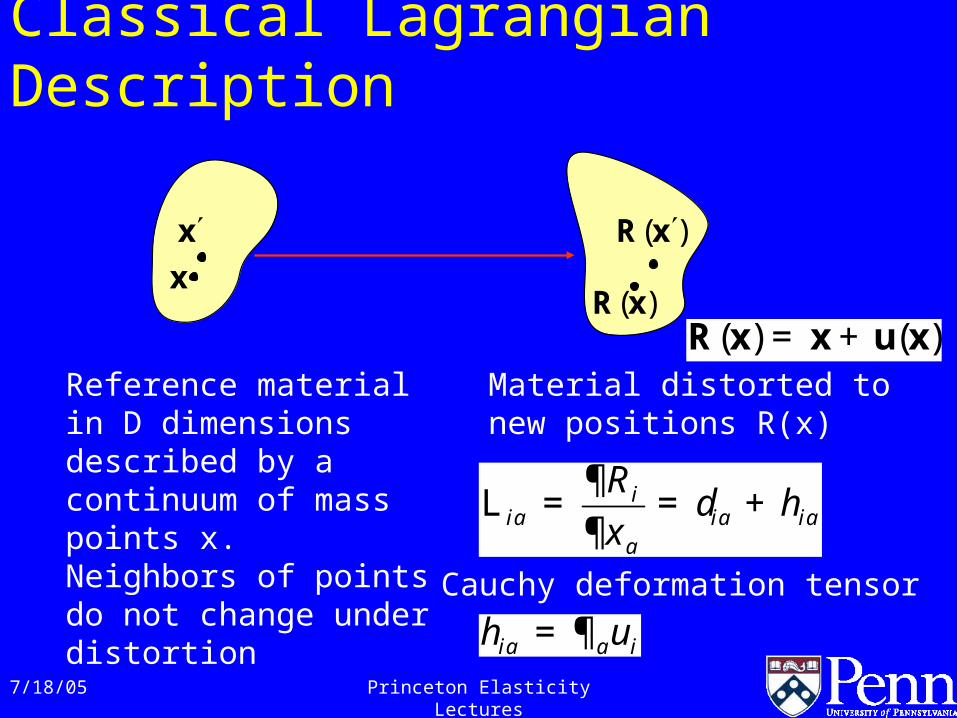
Classical Lagrangian Description
Reference material in D dimensions described by a continuum of mass points x. Neighbors of points do not change under distortion
Material distorted to new positions R(x)
( ) ( )= +R x x ux
ii i i
Rxa a a
a
d h¶
L = = +¶
i iua ah = ¶Cauchy deformation tensor
x
x
( )R x
( )R x
7/18/05 Princeton Elasticity Lectures
Linear and Nonlinear ElasticityLinear: Small deformations – near 1
Nonlinear: Large deformations – >>1
Why nonlinear?• Systems can undergo large deformations – rubbers, polymer networks , …• Non-linear theory needed to understand properties of statically strained materials• Non-linearities can renormalize nature of elasticity• Elegant an complex theory of interest in its own right
Why now:• New interest in biological materials under large strain• Liquid crystal elastomers – exotic nonlinear behavior• Old subject but difficult to penetrate – worth a fresh look
7/18/05 Princeton Elasticity Lectures
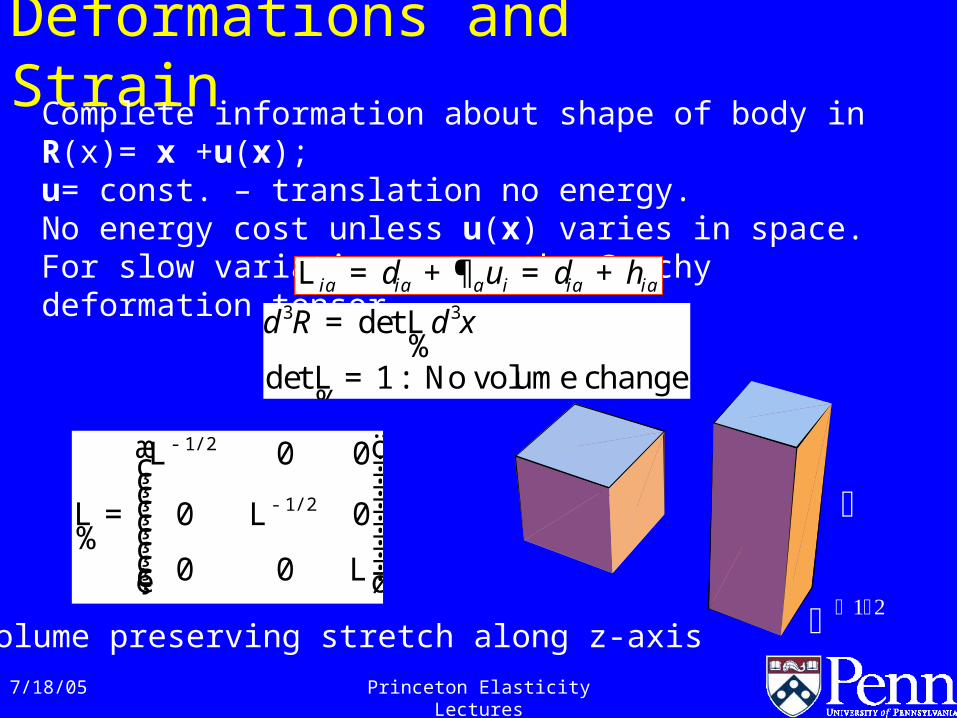
Deformations and StrainComplete information about shape of body in R(x)= x +u(x);u= const. – translation no energy. No energy cost unless u(x) varies in space. For slow variations, use the Cauchy deformation tensor
i i i i iua a a a ad d hL = +¶ = +3 3det
det 1:
d R d x= L
L =%
%No volume change
1/ 2
1/ 2
0 0
0 0
0 0
-
-
æ öL ÷ç ÷ç ÷ç ÷ç ÷L = Lç ÷ç ÷ç ÷÷ç L÷÷ççè ø%
Volume preserving stretch along z-axis
7/18/05 Princeton Elasticity Lectures
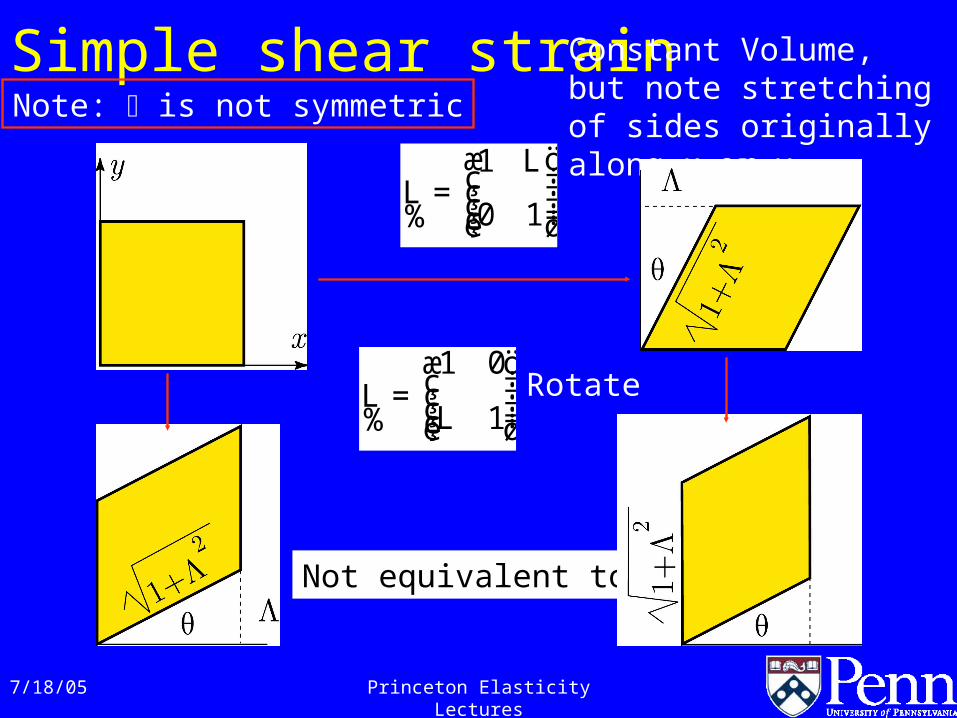
Simple shear strain
1
0 1
æ öL÷ç ÷çL = ÷ç ÷÷çè ø%
1 0
1
æ ö÷ç ÷çL = ÷ç ÷L ÷çè ø%
Constant Volume, but note stretching of sides originally along x or y.
Rotate
Not equivalent to
Note: is not symmetric
7/18/05 Princeton Elasticity Lectures
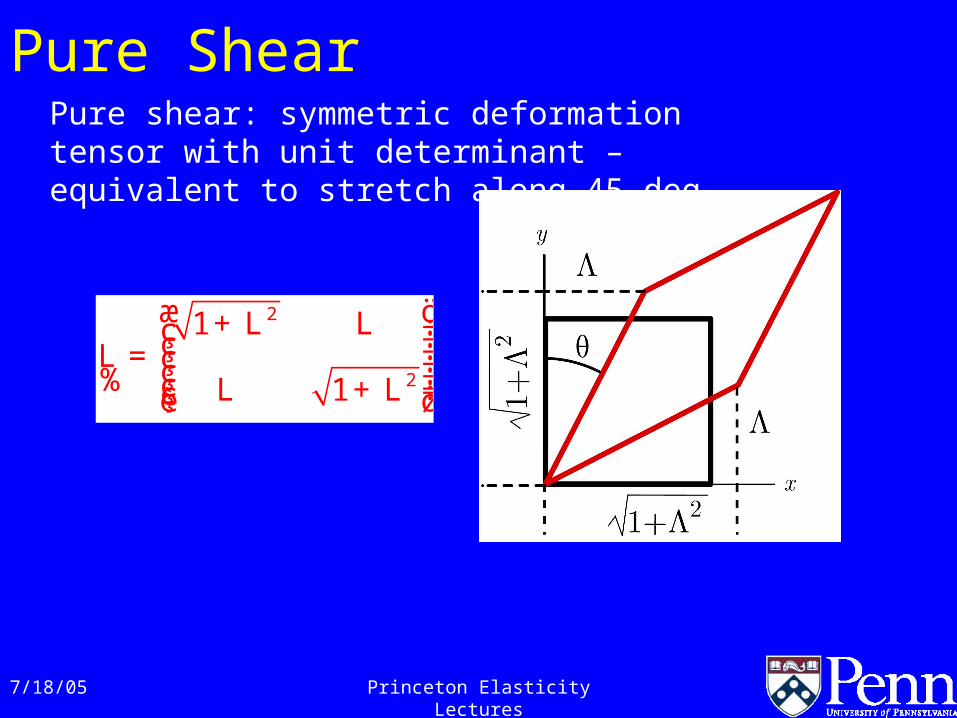
Pure Shear
2
2
1
1
æ ö+L L ÷ç ÷ç ÷L =ç ÷ç ÷ç ÷L +L ÷çè ø%
Pure shear: symmetric deformation tensor with unit determinant – equivalent to stretch along 45 deg.
7/18/05 Princeton Elasticity Lectures
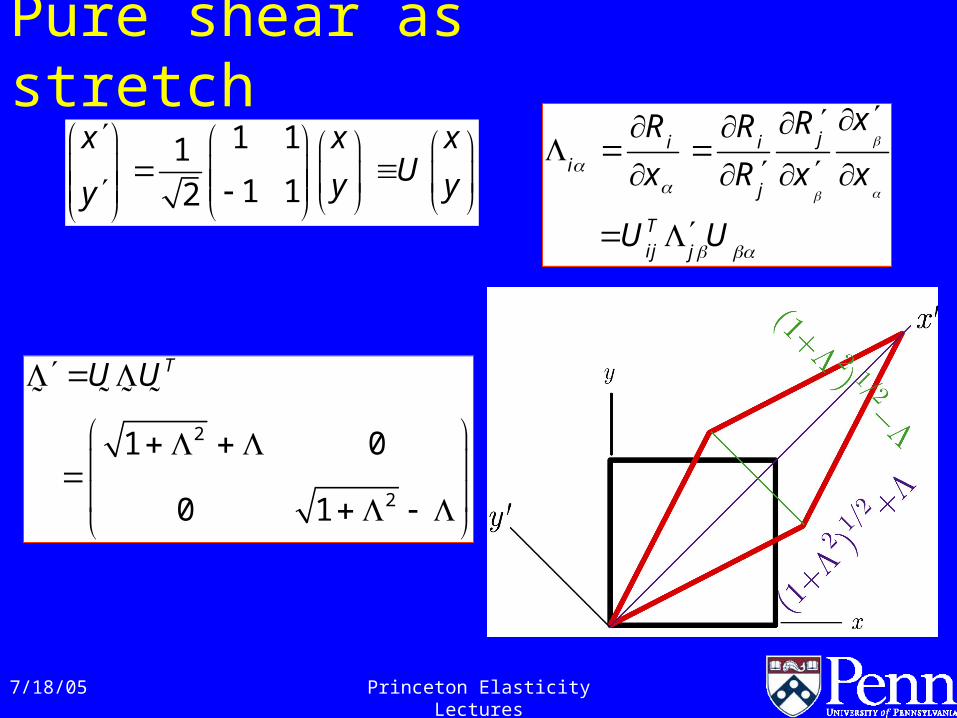
Pure shear as stretch1 111 12
x x xUy yy
ji ii
j
Tij j
xRR R
x R x x
U U
2
2
1 0
0 1
TU U
7/18/05 Princeton Elasticity Lectures
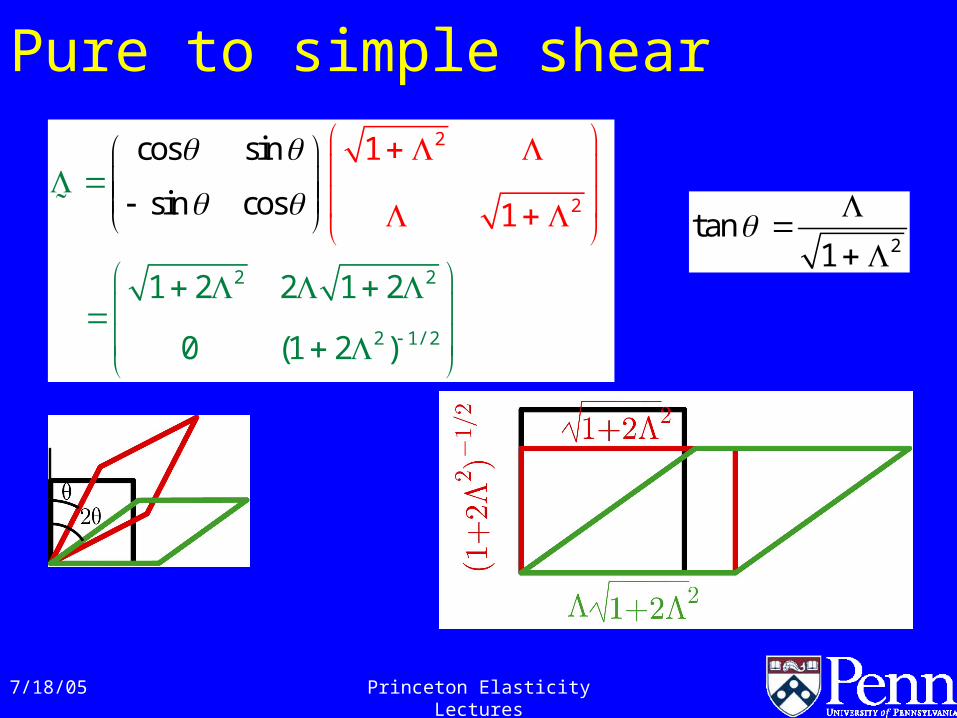
Pure to simple shear
2tan
1
2 2
2 1
2
/
2
2
1 2 2 1 2
0 (1
1cos sin
sin
2
1
)
cos
7/18/05 Princeton Elasticity Lectures
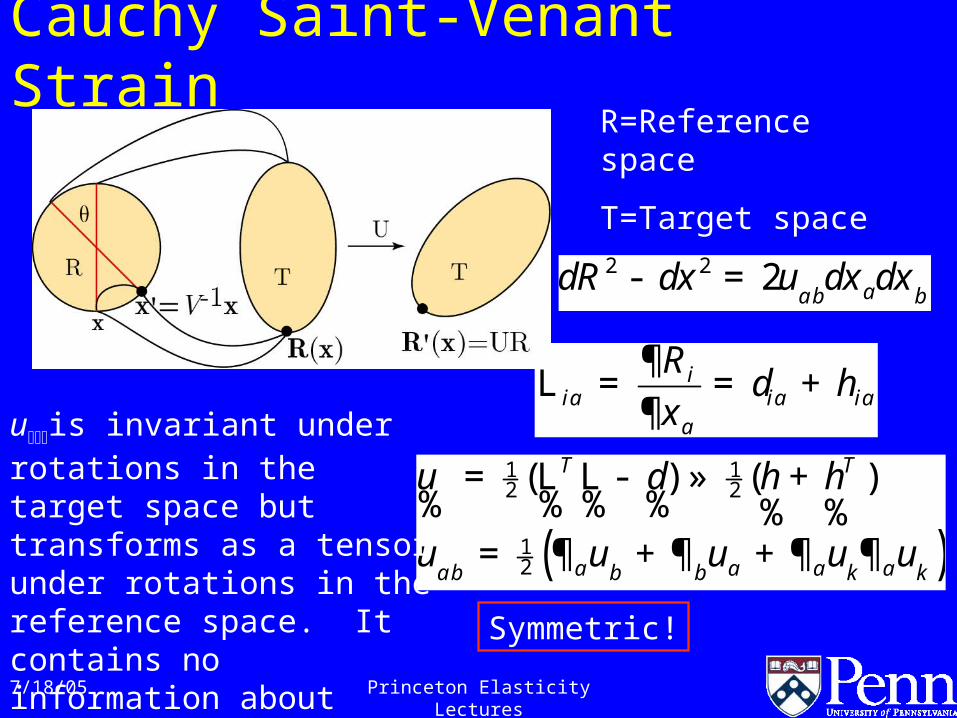
Cauchy Saint-Venant Strain
( )
1 12 2
12
( ) ( )T T
k k
u
u u u u ua a a aab b b
d h h= L L - » +
= ¶ +¶ +¶ ¶% % % % % %
2 2 2dR dx u dx dxaab b- =
ii i i
Rxa a a
a
d h¶
L = = +¶uis invariant under rotations
in the target space but transforms as a tensor under rotations in the reference space. It contains no information about orientation of object.
R=Reference space
T=Target space
Symmetric!
7/18/05 Princeton Elasticity Lectures
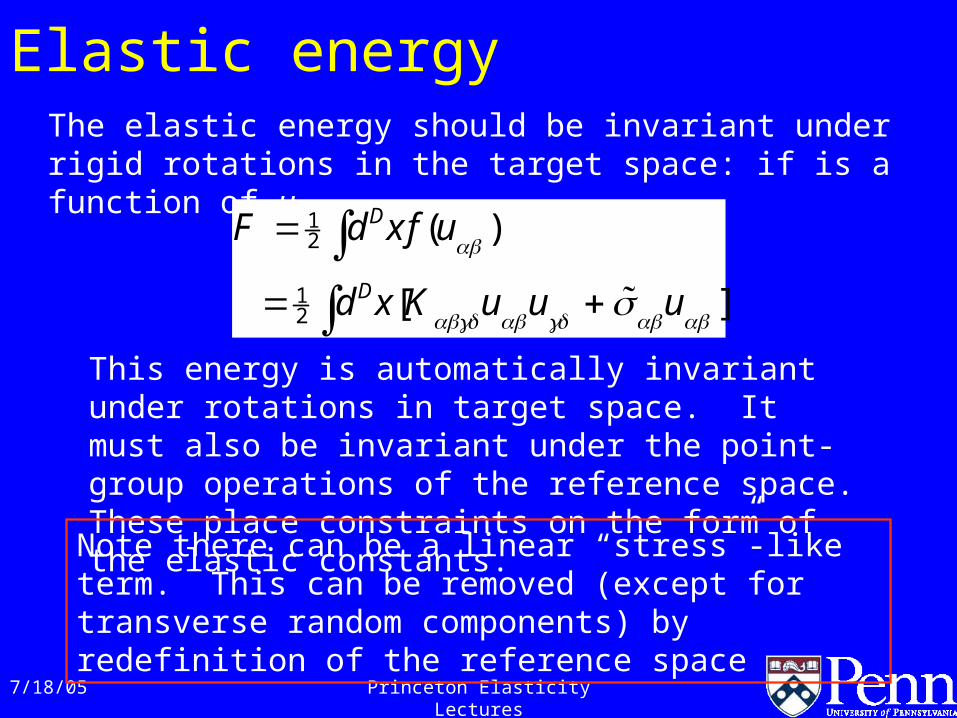
Elastic energyThe elastic energy should be invariant under rigid rotations in the target space: if is a function of u
12
12
( )
[ ]
D
D
F d xf u
d x K u u u
This energy is automatically invariant under rotations in target space. It must also be invariant under the point-group operations of the reference space. These place constraints on the form of the elastic constants.
Note there can be a linear “stress”-like term. This can be removed (except for transverse random components) by redefinition of the reference space
7/18/05 Princeton Elasticity Lectures
Elastic modulus tensorKis the elastic constant or elastic modulus tensor. It has inherent symmetry and symmetries of the reference space.
K K K K
( )K Isotropic system
1 2
123 4
14 5
( )
( )
( )
T T
T T T T T T
T T T T
K C n n n n C n n n n
C C
C n n n n n n n n
Uniaxial (n = unit vector along uniaxial direction)
7/18/05 Princeton Elasticity Lectures
Isotropic and Uniaxial Solid
( )
1
1
2 212
23 2
( ) ( )
( ) ( )
Tr Tr Tr
ff f U V
ff u f V uV
C u DBu u uaa m
-
-
= L = L
= =
= ++ - % %%
Invariant under
( ) U (V )®R x R x
Isotropic: free energy density f has two harmonic elastic constants
Uniaxial: five harmonic elastic constants Invariant under
uni( ) U (V )®R x R x2 21 1
2 21 2 3
2 24 5 ;
( , )
zz zz
z
z
f C u C u u C u
C u C u
x
nn nn
nt n
a n
= + +
+ +
=x x
= shear modulus;B = bulk modulus
7/18/05 Princeton Elasticity Lectures
Force and stress Iext D D
i i i iF d x fu d x u
external force density – vector in target space. The stress tensor i is mixed. This is the engineering or 1st Piola-Kirchhoff stress tensor = force per area of reference space. It is not necessarily symmetric!
i if
( )
( ) ( ) ( )D
i ii i
uF fd x f
u u u
x
x x xab
a aab
dds
d d
¢¶¢- = = = - ¶¢¶ò
12
( )( ) ( )
( ) i ii
u
u
xx x
xab
aa b b
dd
d
¢¢ ¢ ¢= L ¶ +L ¶ -
I Ii i i
fua b b ba
ba
s s¶
= L º L¶
II is the second Piola-Kirchhoff stress tensor - symmetric
Note: In a linearized theory, i = iII
7/18/05 Princeton Elasticity Lectures
Cauchy stressThe Cauchy stress is the familiar force per unit area in the target space. It is a symmetric tensor in the target space.
d I d Ci i ij j i
d x u d R uaas s¶ = Ñò ò i
iR¶
Ñ º¶
detd dd R d x= L% i
i ii
R
x x Ra aa a
¶¶ ¶¶ = = = L Ñ
¶ ¶ ¶
1 1det det
C I T II Tij i j i ja a a aab
s s s= L = L LL L% %
1det
C II Ts s= L LL% %% %%
Symmetric as required
7/18/05 Princeton Elasticity Lectures
Coupling to other fieldsWe are often interested in the coupling of target-space vectors like an electric field or the nematic director to elastic strain. How is this done? The strain tensor u is a scalar in the target space, and it can only couple to target-space scalars, not vectors.
Answer lies in the polar decomposition theorem
1/ 2 1/ 2 1/ 2( ) ( )T T M-L = L L L L L º Q% %% % % % %% 1/ 2( 2 );TM u Md -= L L = + Q = L
% % % % % % %%1/ 2 1/ 2 1/ 2 1/ 2 1( ) ( )T T T T TOO M M M M d- - - - -= L L = L L = L L L L =
%% %% %% %% % % %% % % %M u
O% %
%
is symmetric and depends on only.
is an orthogonal, unimodular rotation matrix
7/18/05 Princeton Elasticity Lectures
Target-reference conversion
i
O
E Ea
%%
The rotation matrix converts target-space
vectors to reference-space vectors and vice-versa
; Ti i i i
E O E E O Ea aa a= =% %
.i ia a
dL O =%
If is symmetric, 12( )i i i i
i i k k
O u ua a a a
a a
d
d e
» + ¶ - ¶
» - W
To linear order in u, Oi has a term proportional to the antisymmetric part of the strain matrix.
7/18/05 Princeton Elasticity Lectures
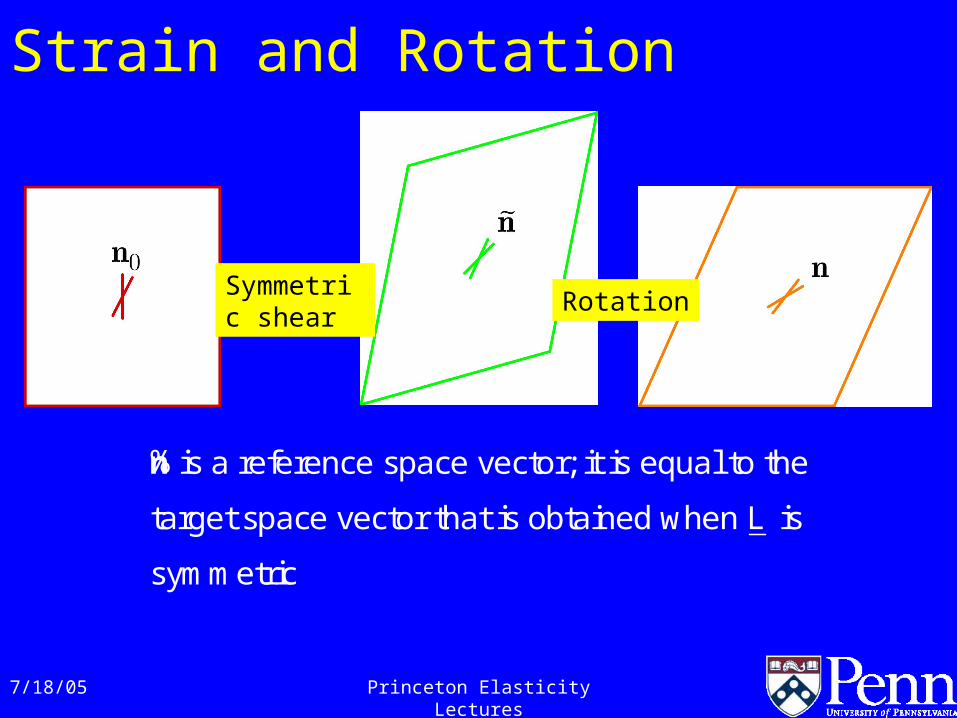
Strain and Rotation
Simple ShearSymmetric shear
Rotation
n
L
% is a reference space vector; it is equal to the
target space vector that is obtained when is
symmetric
7/18/05 Princeton Elasticity Lectures
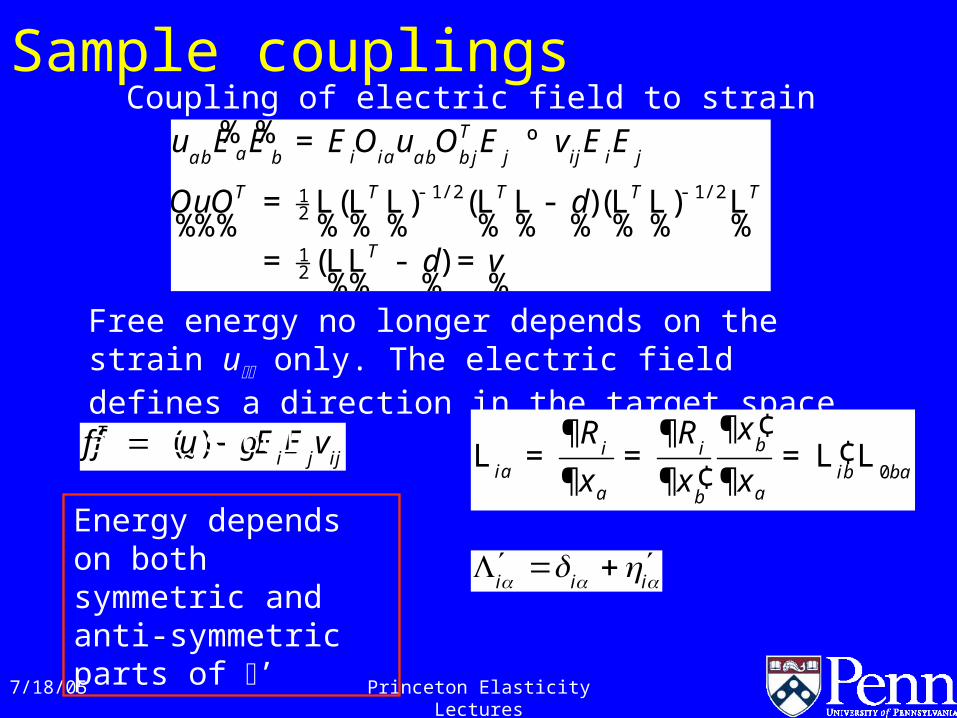
Sample couplings
1/ 2 1/ 212
12
( ) ( )( )
( )
Ti i j ij i jj
T T T T T
T
u E E E O u O E v E E
OuO
v
a aab b ab b
d
d
- -
= º
= L L L L L - L L L
= LL - =
% %
%%% %% % % % % % % %
%% % %
Coupling of electric field to strain
( )Ti j ij
ff u gE E v
Free energy no longer depends on the strain u only. The electric field defines a direction in the target space as it should
0i i
i i
xR R
x x xb
a b baa ab
¢¶¶ ¶¢L = = = L L
¢¶ ¶ ¶
i i i Energy depends on both symmetric and anti-symmetric parts of ’
7/18/05 Princeton Elasticity Lectures
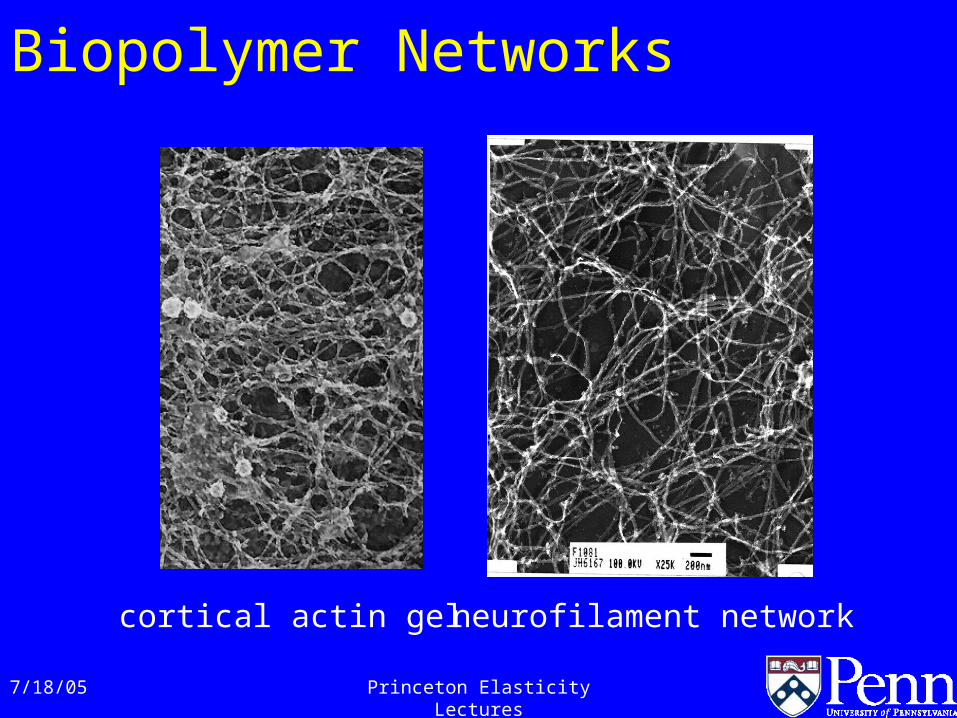
Biopolymer Networks
cortical actin gel neurofilament network
7/18/05 Princeton Elasticity Lectures
Characteristics of Networks
• Off Lattice• Complex links, semi-flexible rather
than random-walk polymers• Locally randomly inhomogeneous
and anisotropic but globally homogeneous and isotropic
• Complex frequency-dependent rheology
• Striking non-linear elasticity
7/18/05 Princeton Elasticity Lectures
Goals
• Strain Hardening (more resistance to deformation with increasing strain) – physiological importance
• Formalisms for treating nonlinear elasticity of random lattices– Affine approximation– Non-affine
7/18/05 Princeton Elasticity Lectures
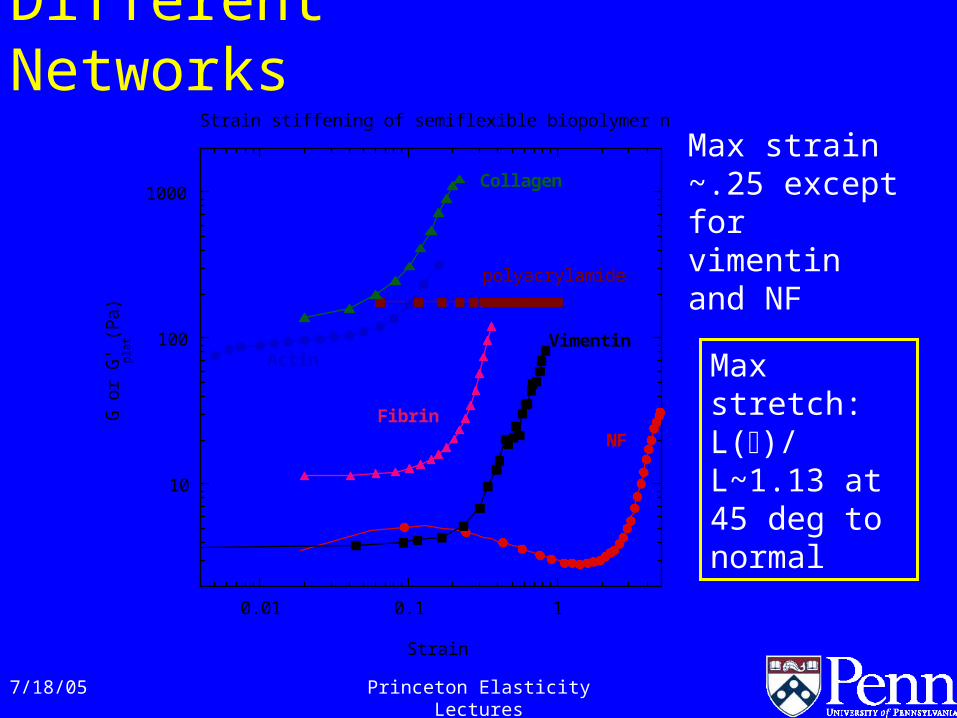
Different Networks
10
100
1000
0.01 0.1 1
Strain stiffening of semiflexible biopolymer networksG
or
G' p
lat(P
a)
Strain
NF
Vimentin
Collagen
Actin
Fibrin
polyacrylamide
Max strain ~.25 except for vimentin and NF
Max stretch:L()/L~1.13 at 45 deg to normal
7/18/05 Princeton Elasticity Lectures
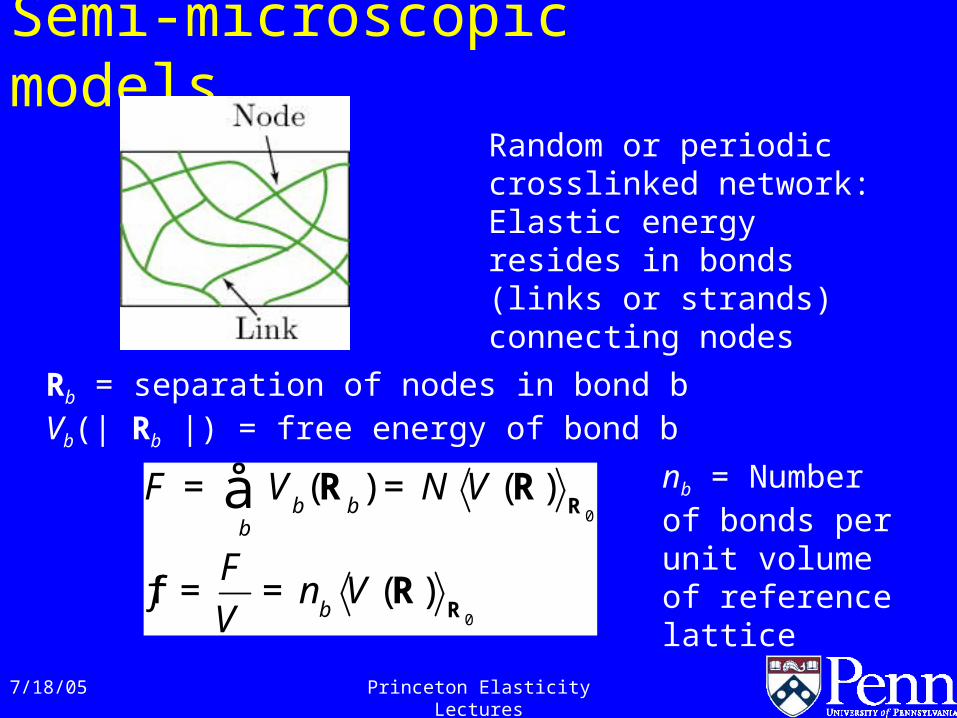
Semi-microscopic models
Random or periodic crosslinked network: Elastic energy resides in bonds (links or strands) connecting nodes
Rb = separation of nodes in bond bVb(| Rb |) = free energy of bond b
0
0
( ) ( )
( )
b bb
b
F V N V
Ff n V
V
R
R
R R
R=f
= =
=
å nb = Number of bonds per unit volume of reference lattice
7/18/05 Princeton Elasticity Lectures
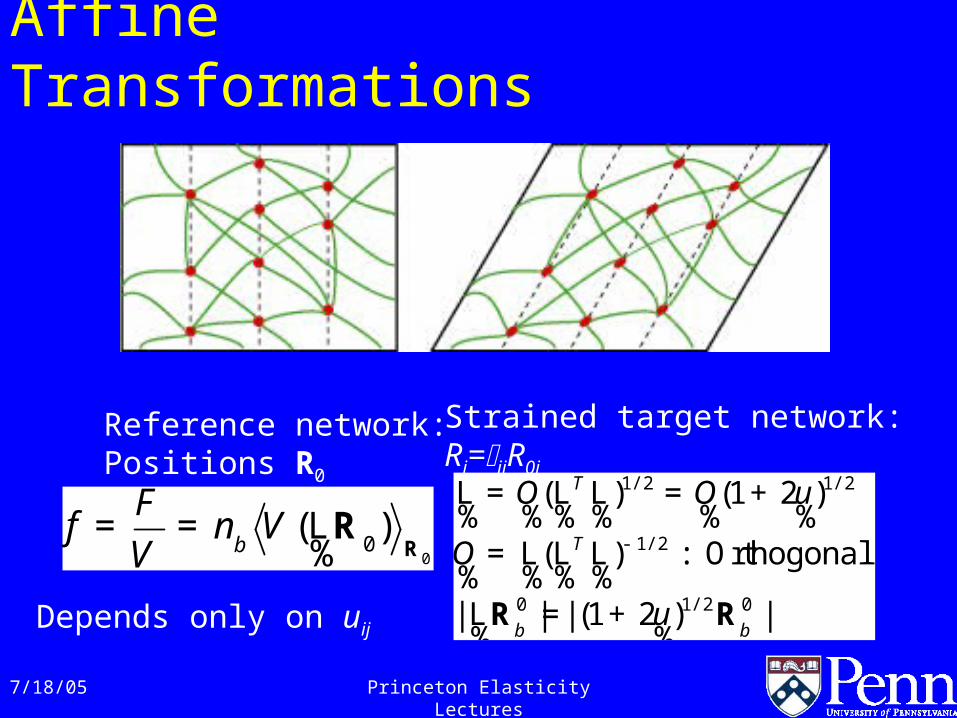
Affine Transformations
Reference network:Positions R0
Strained target network:Ri=ijR0j
00
( )b
Ff n V
V RR= = L
%
1/ 2 1/ 2
1/ 2
0 1/ 2 0
( ) (1 2 )
( ) :
| | |(1 2 ) |
T
T
b b
O O u
O
uR R
-
L = L L = +
= L L L
L = +
% %% % % %
% %% %
% %
Orthogonal
Depends only on uij
7/18/05 Princeton Elasticity Lectures
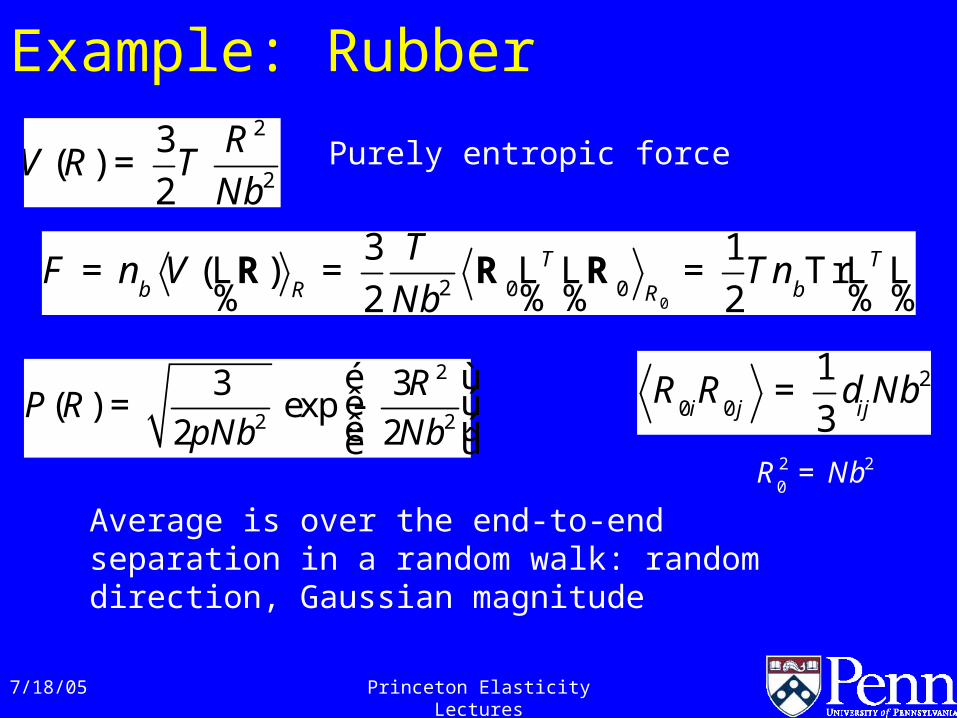
Example: Rubber
2 20
R Nb=
2
2
3( )
2R
V R TNb
=
02 0 0
3 1( ) Tr
2 2T T
b bR R
TF n V Tn
NbR R R= L = L L = L L
% % % % %
20 0
13i j ij
R R Nbd=
Purely entropic force
Average is over the end-to-end separation in a random walk: random direction, Gaussian magnitude
2
2 2
3 3( ) exp
2 2R
P RNb Nbp
é ùê ú= -ê úë û
7/18/05 Princeton Elasticity Lectures
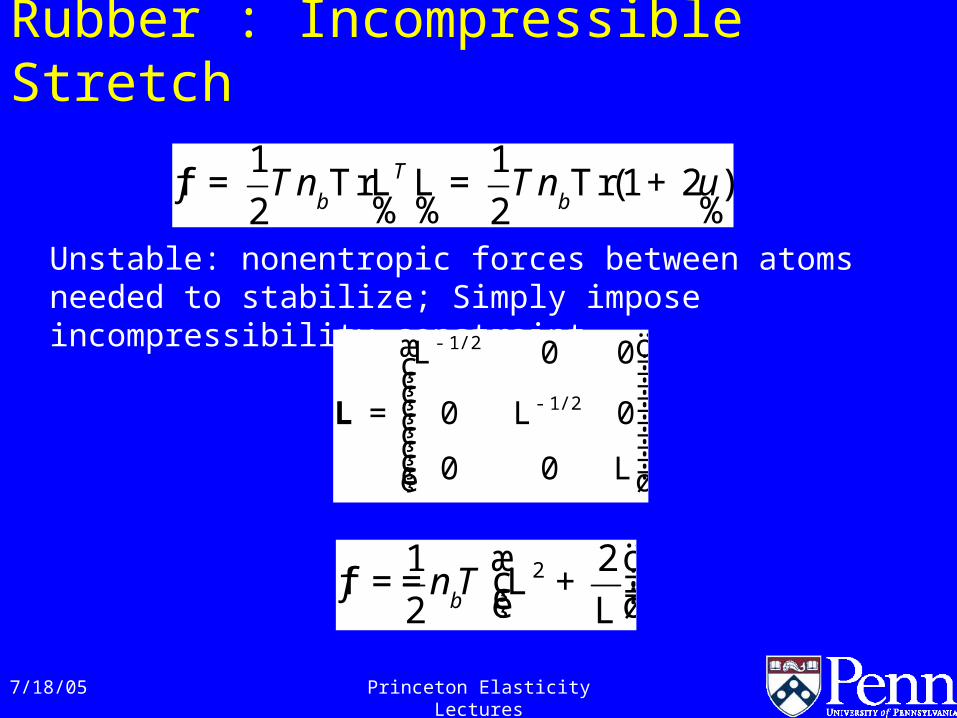
Rubber : Incompressible Stretch
1 1Tr Tr(1 2 )
2 2T
b bf Tn Tn uf = L L = +
% % %Unstable: nonentropic forces between atoms needed to stabilize; Simply impose incompressibility constraint.
1/ 2
1/ 2
0 0
0 0
0 0
-
-
æ öL ÷ç ÷ç ÷ç ÷ç ÷= Lç ÷ç ÷ç ÷÷ç L÷çè ø
L
21 22 b
f nT=fæ ö÷ç= L + ÷÷çè øL
7/18/05 Princeton Elasticity Lectures
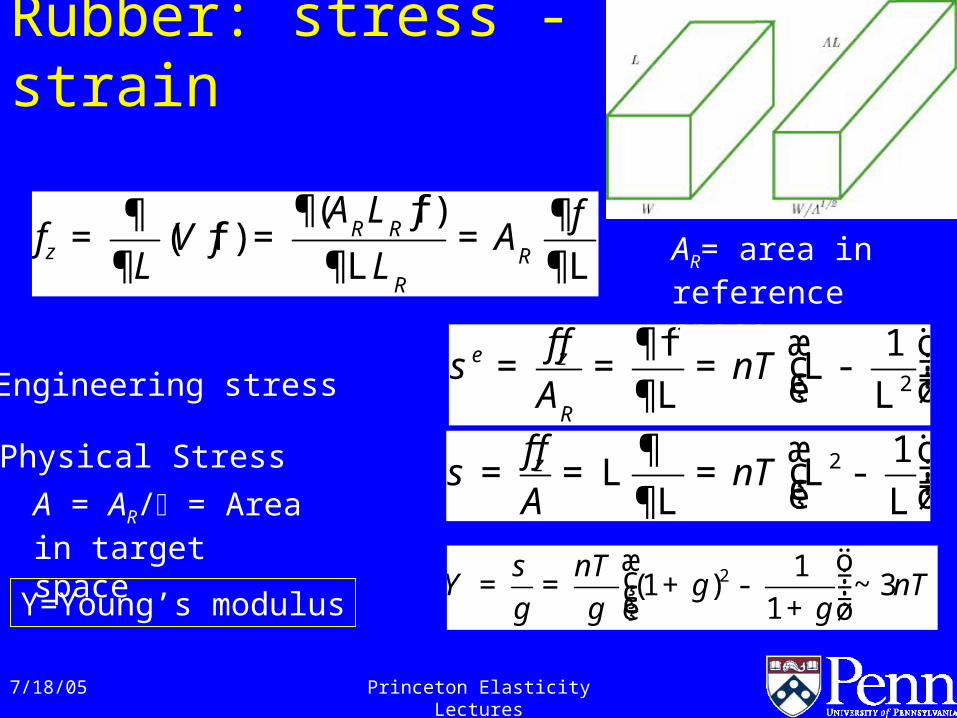
Rubber: stress -strain
( )( )
R Rz R
R
A L f ff V f A
L L
ff
¶¶ ¶= = =
¶ ¶L ¶L
2
1e z
R
ffnT
Af
sæ ö¶ ÷ç= = = L - ÷÷çè ø¶L L
2 1zff nTA
sæ ö¶ ÷ç= = L = L - ÷÷çè ø¶L L
Engineering stress
Physical Stress
AR= area in reference space
A = AR/ = Area in target space
2 1(1 ) ~3
1nT
Y nTs
gg g g
æ ö÷ç= = + - ÷ç ÷ç +è øY=Young’s modulus
7/18/05 Princeton Elasticity Lectures
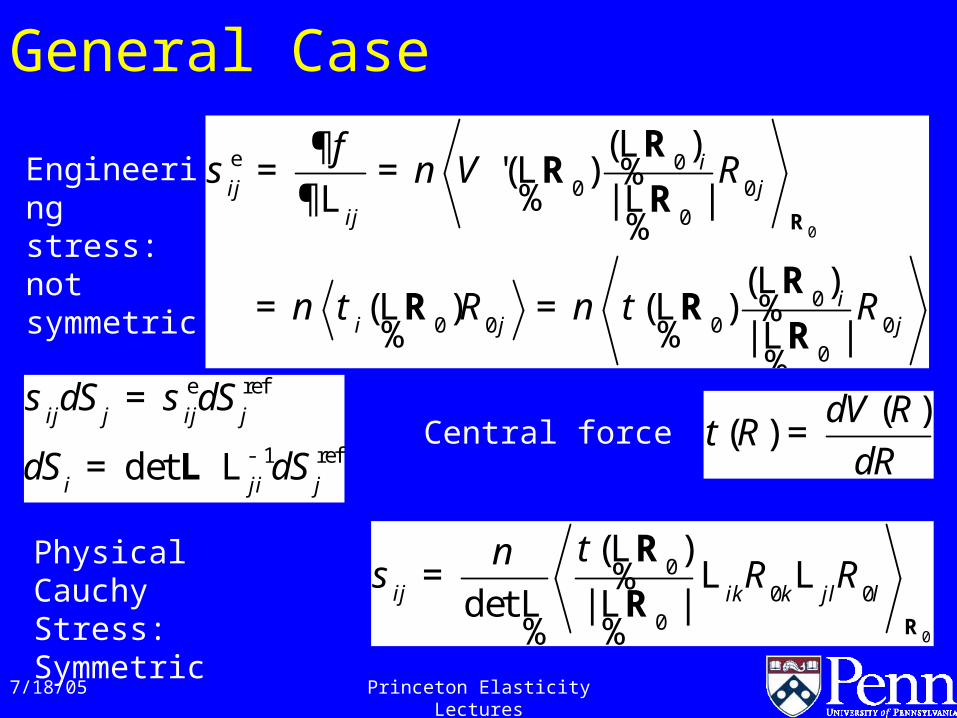
General Case
e ref
1 refdet
ij j ij j
i ji j
dS dS
dS dS
s s-
=
= LL
( )( )
dV RR
dRt =
Engineering stress: not symmetric
Physical Cauchy Stress: Symmetric
Central force
0
e 00 0
0
00 0 0 0
0
( )'( )
| |
( )( ) ( )
| |
iij j
ij
ii j j
fn V R
n R n R
R
RR
R
RR R
R
s
t t
L¶= = L
¶L L
L= L = L
L
%%
%
%% %
%
0
00 0
0
( )
det | |ij ik k jl l
nR R
R
R
R
ts
L= L L
L L%
% %
7/18/05 Princeton Elasticity Lectures
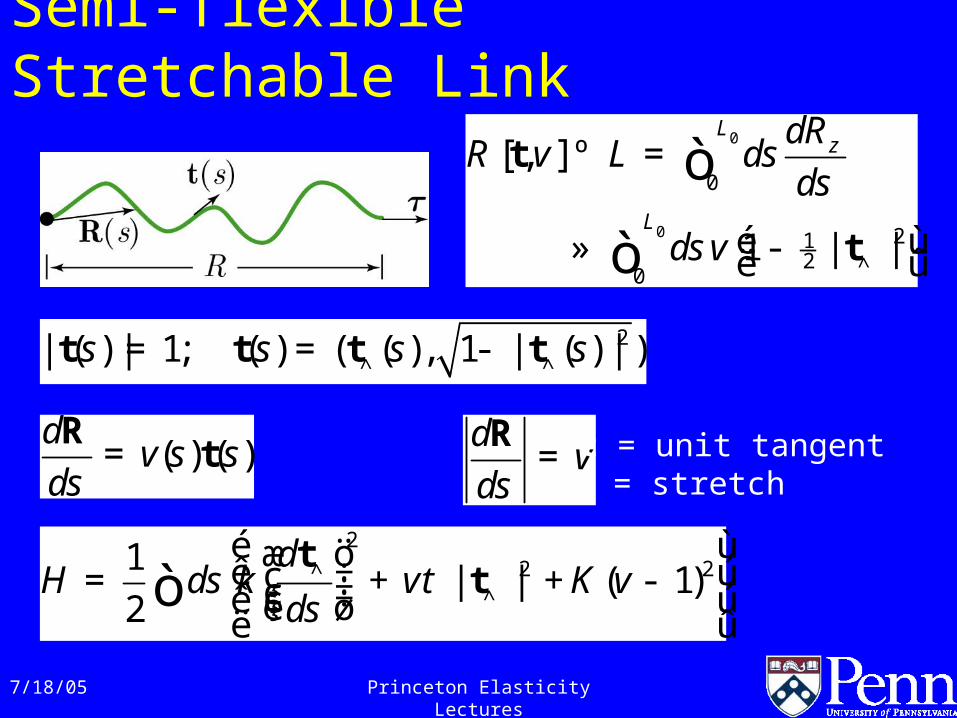
Semi-flexible Stretchable Link
22 21
| | ( 1)2
dH ds v K v
dsk t^
^
é ùæ öê ú÷ç= + + -÷ç ÷çê úè øë ûò
tt
( ) ( )d
v s sds
=R
t
2| ( ) | 1; ( ) ( ( ), 1 | ( ) | )s s s s^ ^
= = -t t t t
dv
ds=
R
[ ]0
0
0
212
0
,
1 | |
Lz
L
dRR v L ds
ds
dsv^
º =
é ù» -ë û
ò
ò
t
t
t = unit tangentv = stretch
7/18/05 Princeton Elasticity Lectures
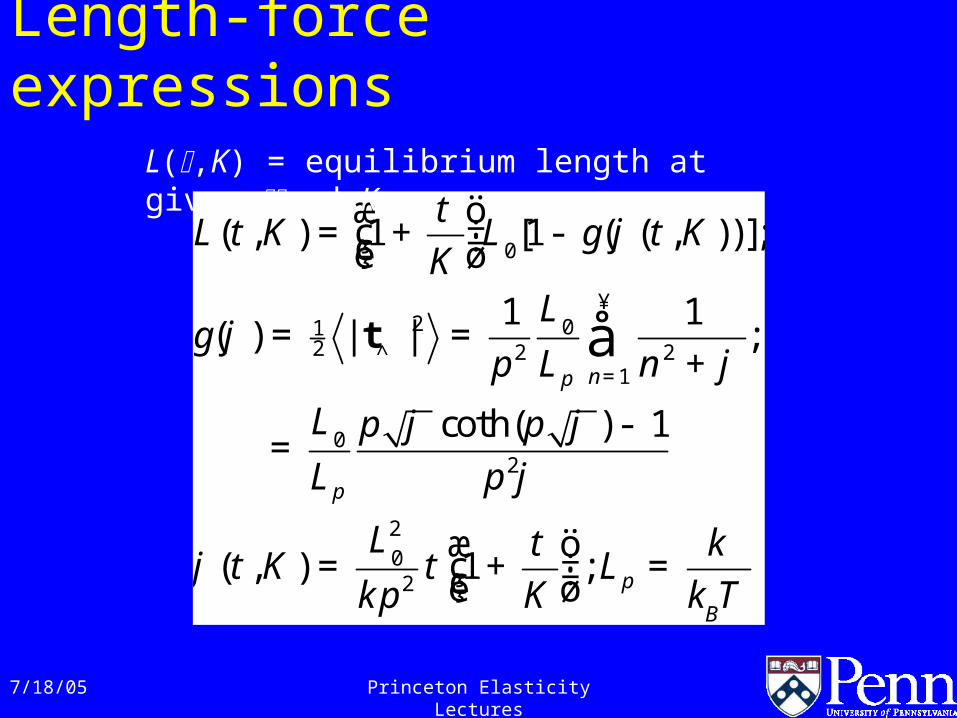
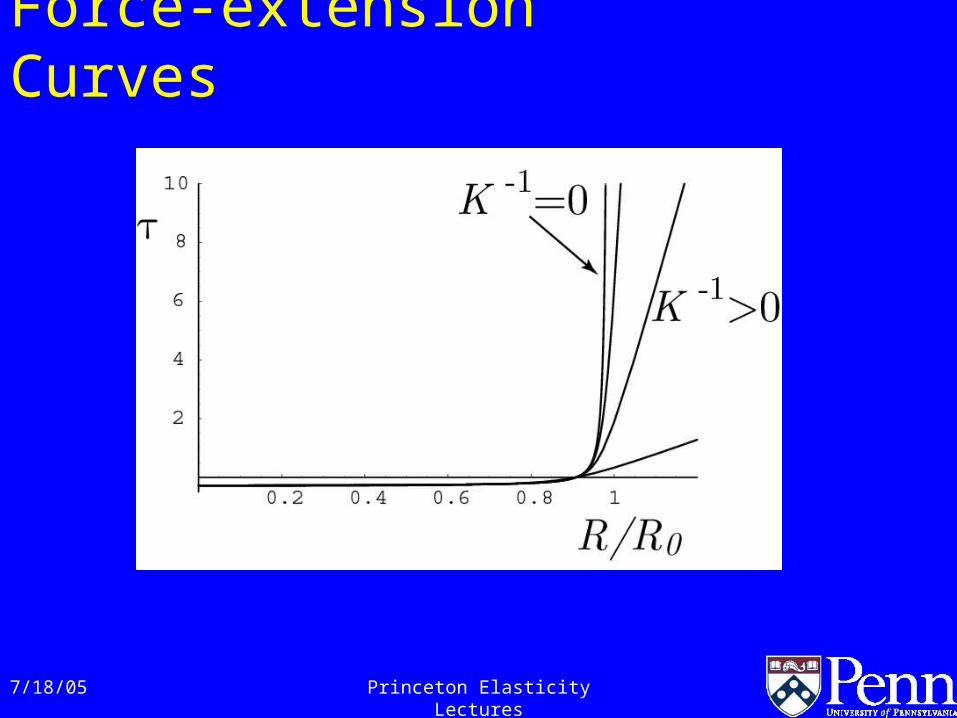
Length-force expressions
0
2 012 2 2
1
02
202
( , ) 1 [1 ( ( , ))];
1 1( ) | | ;
coth( ) 1
( , ) 1 ;
np
p
p
B
L K L g KK
Lg
L n
L
L
LK L
K k T
tt j t
jp j
p j p jp j
t kj t t
kp
¥
^=
æ ö÷ç= + -÷çè ø
= =+
-=
æ ö÷ç= + =÷çè ø
åt
L(,K) = equilibrium length at given and K
7/18/05 Princeton Elasticity Lectures
Force-extension Curves
7/18/05 Princeton Elasticity Lectures
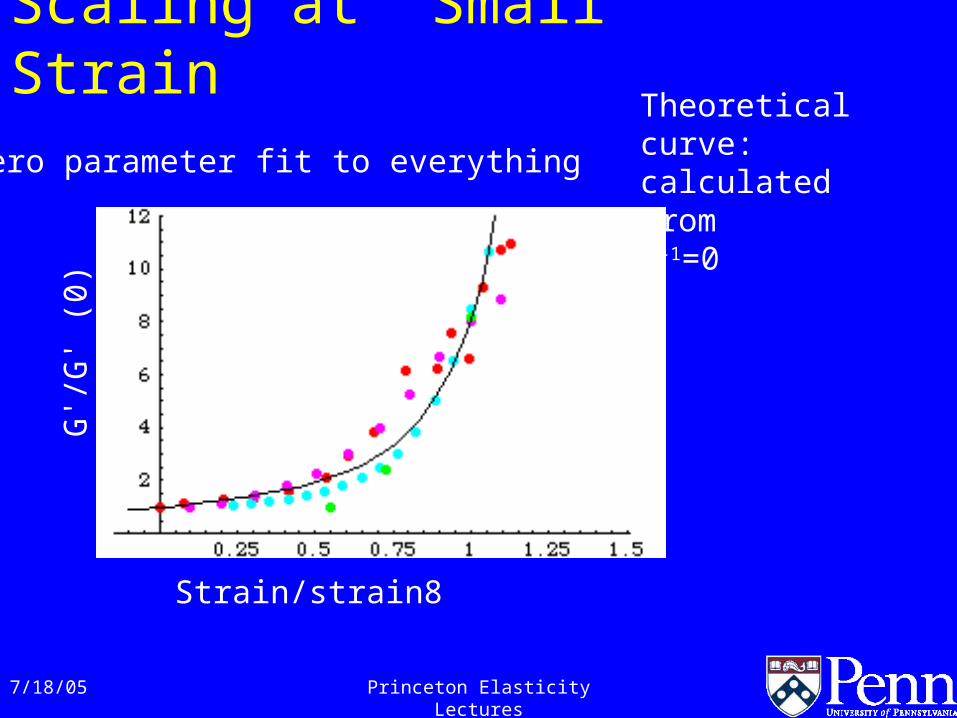
Scaling at “Small” StrainG
'/G
' (0
)
Strain/strain8
zero parameter fit to everything
Theoretical curve: calculated from K-1=0
7/18/05 Princeton Elasticity Lectures
What are Nematic Gels?
• Homogeneous Elastic media with broken rotational symmetry (uniaxial, biaxial)
• Most interesting - systems with broken symmetry that develops spontaneously from a homogeneous, isotropic elastic state
7/18/05 Princeton Elasticity Lectures
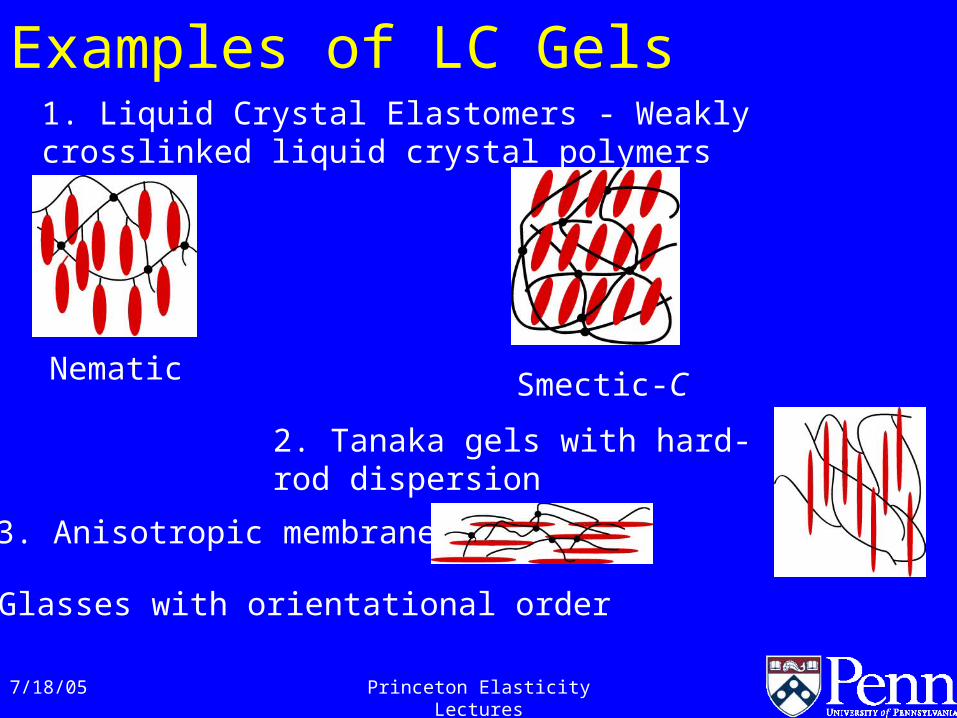
Examples of LC Gels1. Liquid Crystal Elastomers - Weakly crosslinked liquid crystal polymers
4. Glasses with orientational order
2. Tanaka gels with hard-rod dispersion
3. Anisotropic membranes
Nematic Smectic-C
7/18/05 Princeton Elasticity Lectures
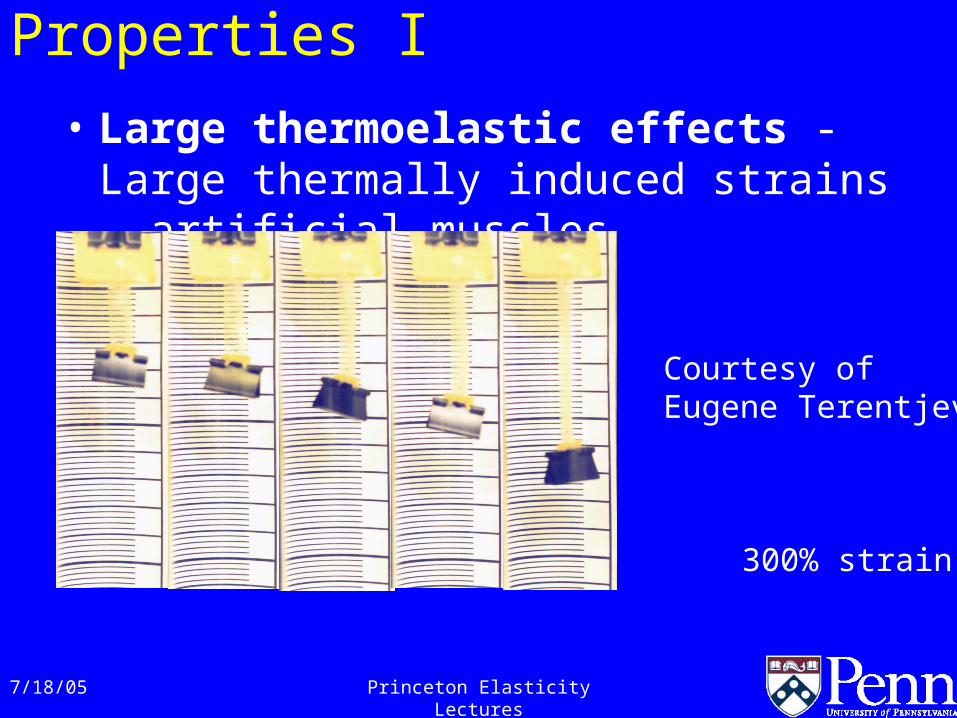
Properties I
• Large thermoelastic effects - Large thermally induced strains - artificial muscles
Courtesy of Eugene Terentjev
300% strain
7/18/05 Princeton Elasticity Lectures
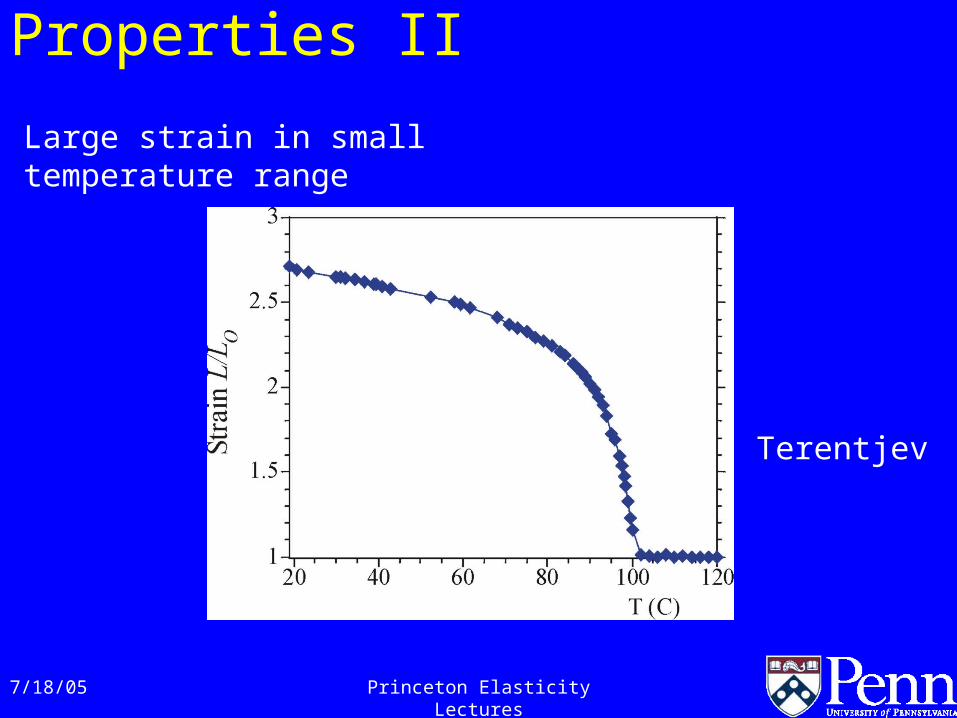
Properties II
Large strain in smalltemperature range
Terentjev
7/18/05 Princeton Elasticity Lectures
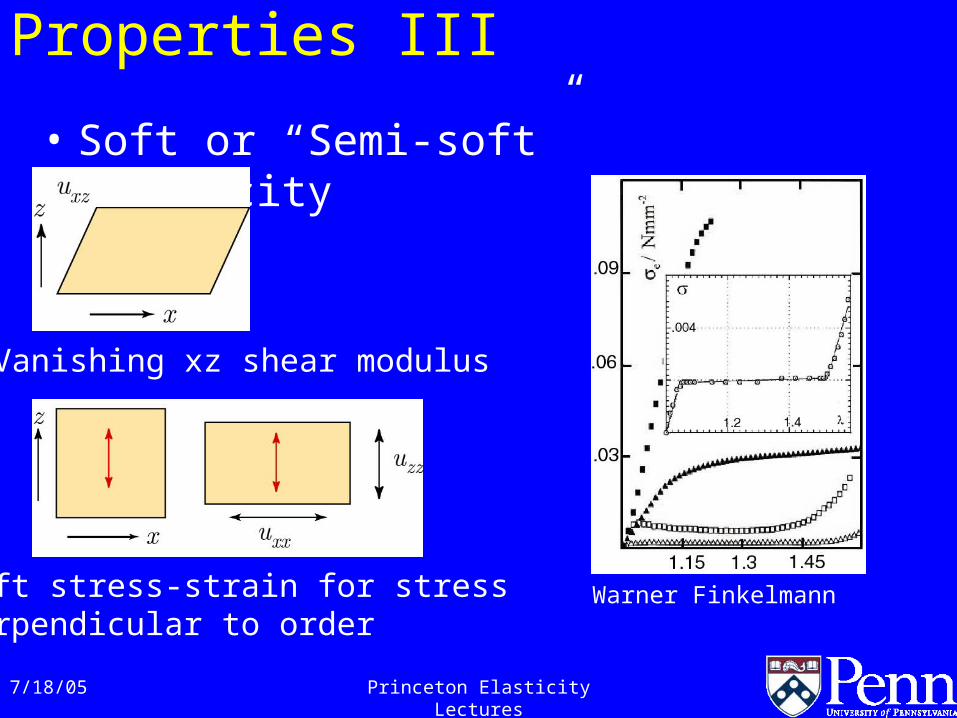
Properties III
• Soft or “Semi-soft” elasticity
Vanishing xz shear modulus
Soft stress-strain for stressperpendicular to order
Warner Finkelmann
7/18/05 Princeton Elasticity Lectures
Model for Isotropic-Nematic trans.
( )2 2 23 212 Tr TrTrf Bu u C u D uaa m - += + %% %
13u u uab ab ab ggd= -%
approaches zero signals a transition to a nematic state with a nonvanishing
( )13u S n naab b abd= -%
7/18/05 Princeton Elasticity Lectures
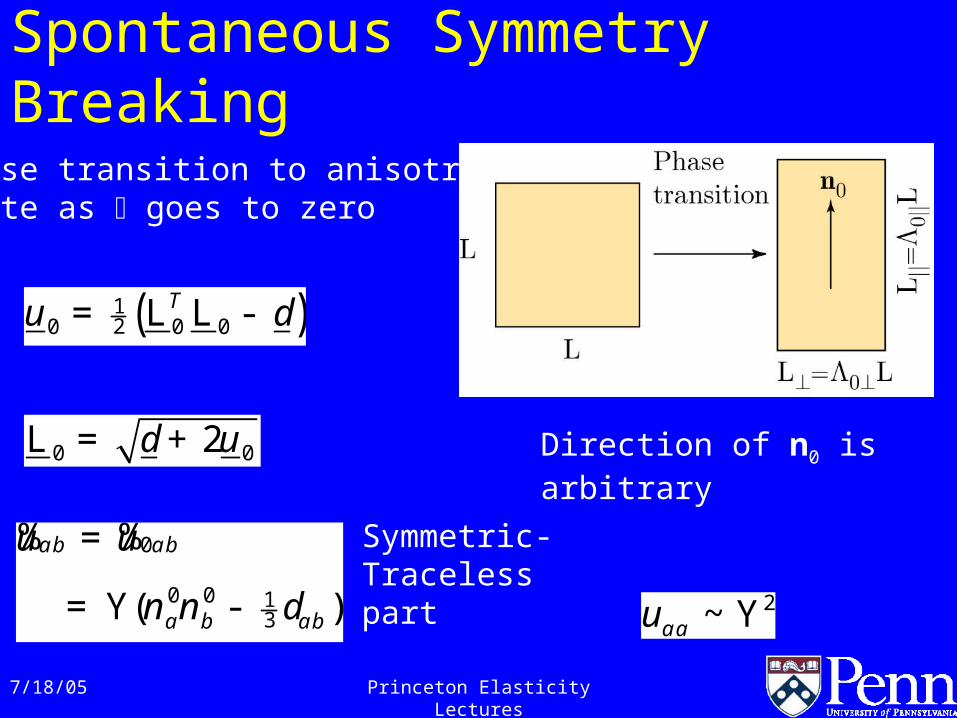
Spontaneous Symmetry Breaking
Phase transition to anisotropicstate as goes to zero
Direction of n0 isarbitrary
0
0 0 13( )
u u
n n
ab ab
a b abd
=
= Y -
% %
2~uaa Y
( )120 0 0
Tu d= L L -
0 02udL = +
Symmetric-Tracelesspart
7/18/05 Princeton Elasticity Lectures
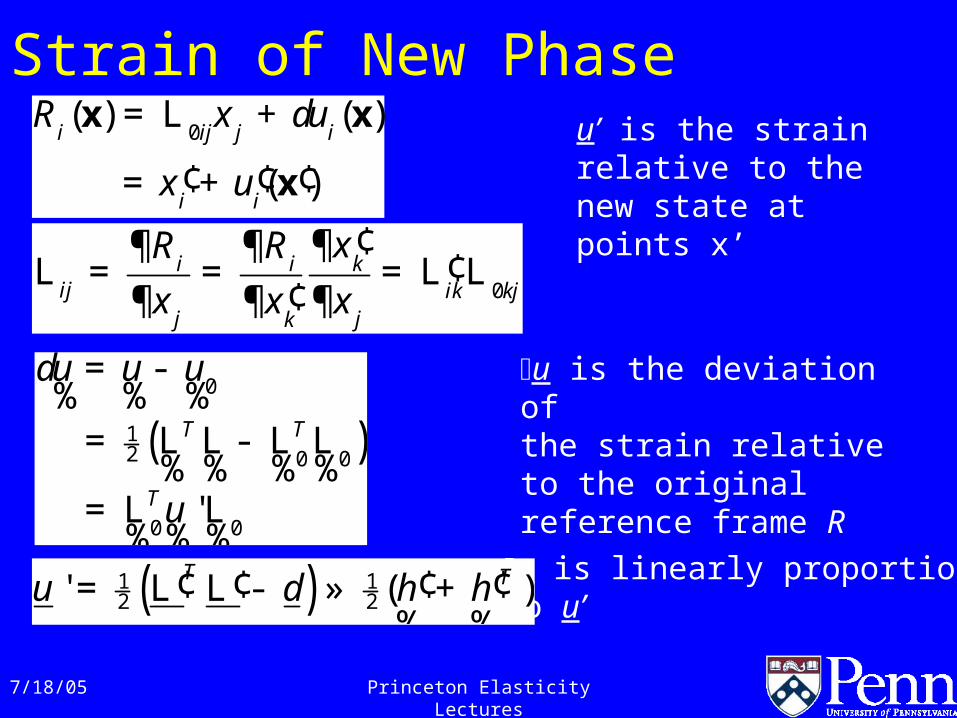
Strain of New Phase
u is the deviation ofthe strain relative to the original reference frame R from u0
u’ is the strain relative to the new state at points x’
u is linearly proportionalto u’( )1 1
2 2' ( )T Tu d h h¢ ¢ ¢ ¢= L L - » +
% %
0( ) ( )
( )
i ij j i
i i
R x u
x u
d= L +
¢ ¢ ¢= +
x x
x
( )0
12 0 0
0 0'
T T
T
u u u
u
d = -
= L L - L L
= L L
% % %
% % % %
%%%
0i i k
ij ik kjj jk
xR R
x x x
¢¶¶ ¶¢L = = = L L
¢¶ ¶ ¶
7/18/05 Princeton Elasticity Lectures
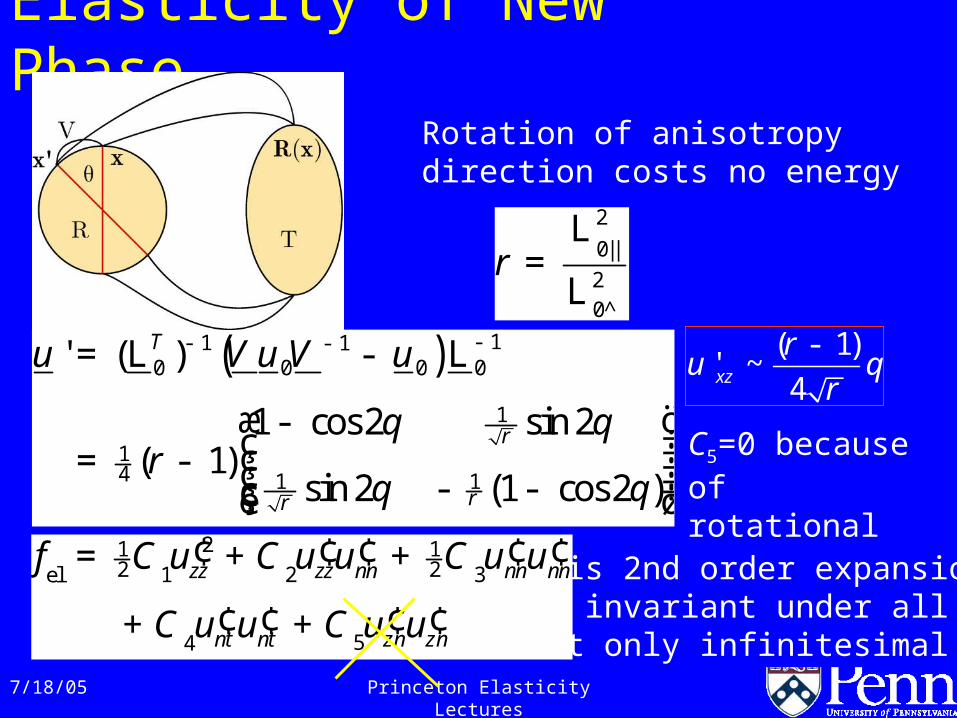
Elasticity of New Phase
Rotation of anisotropy direction costs no energy
C5=0 because ofrotational invariance
This 2nd order expansionis invariant under all U but only infinitesimal V
( )
( )
11 10 0 0 0
1
14 1 1
' ( )
1 cos2 sin2( 1)
sin2 1 cos2
T
r
rr
u V u V u
rq q
q q
-- -= L - L
æ ö- ÷ç ÷ç= - ÷ç ÷- -ç ÷çè ø
( 1)' ~
4xz
ru
rq
-
2
0||20
r^
L=
L
21 12 21 2 3el
54
zz zz
z z
f C u C u u C u u
C u u C u u
nn nn nn
nt nt n n
¢ ¢ ¢ ¢ ¢= + +
¢ ¢ ¢ ¢+ +
7/18/05 Princeton Elasticity Lectures
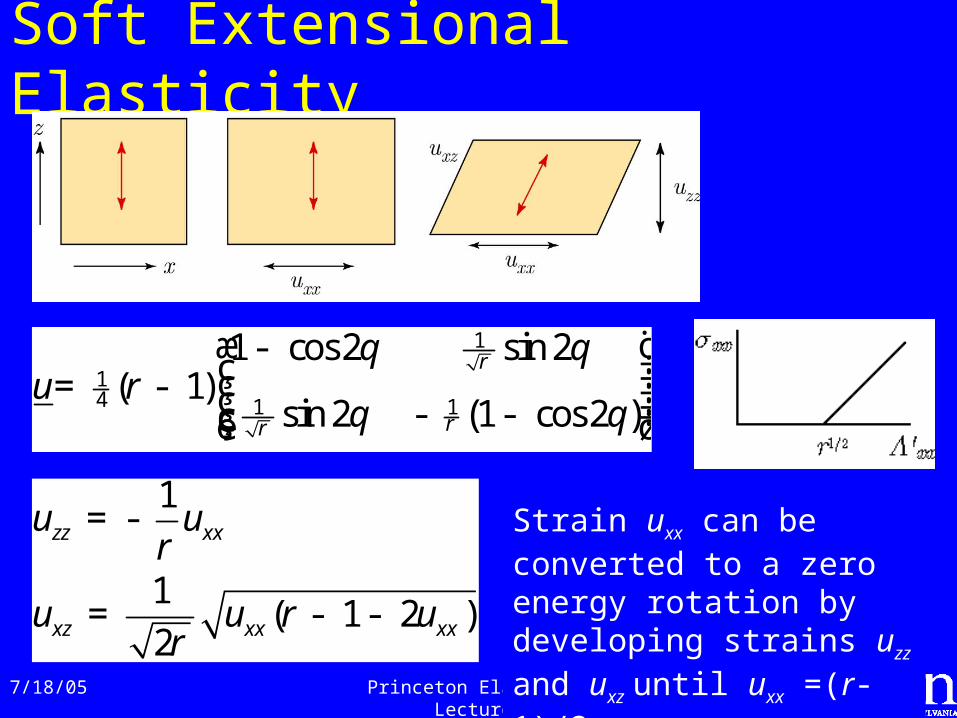
Soft Extensional Elasticity
Strain uxx can be converted to a zero energy rotation by developing strains uzz and uxz until uxx =(r-1)/2
( )
1
14 1 1
1 cos2 sin2( 1)
sin2 1 cos2
r
rr
u rq q
q q
æ ö- ÷ç ÷ç= - ÷ç ÷- -ç ÷çè ø
1
1( 1 2 )
2
zz xx
xz xx xx
u ur
u u r ur
= -
= - -
7/18/05 Princeton Elasticity Lectures
Frozen anisotropy: Semi-soft
( ) ( )hzzf u f u hu= -
( ) ( ) ( 2 )hzz xzf u f u h u uq¢ = - +
System is now uniaxial – why not simply use uniaxial elastic energy? This predicts linear stress-stain curve and misses lowering of energy by reorientation:
2 2 2 21 12 2 51 2 3 4zz zz zf C u C u u C u C u C unn nn nt n= + + + +
Model Uniaxial system:Produces harmonic uniaxial energy for small strain but has nonlinear terms – reduces to isotropic when h=0
f (u) : isotropic
2
2xz xx zz
xx zz xz
u u uu u u
u u uqæ ö- - ÷ç ÷¢® = + ç ÷ç ÷- ÷çè ø
Rotation
7/18/05 Princeton Elasticity Lectures
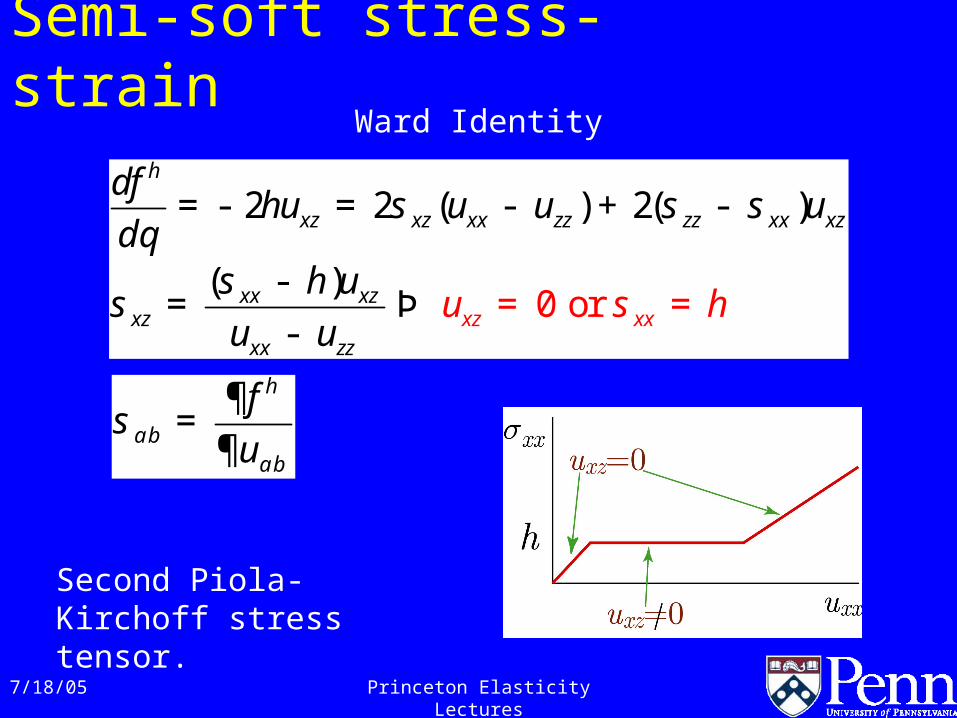
Semi-soft stress-strain
2 2 ( ) 2( )
( )0 or
h
xz xz xx zz zz xx xz
xx xzxz xz
xx zzxx
dfhu u u u
dh u
u uu h
s s
ss s
sq
=
= - = - -
-= Þ
-=
+
hfuab
ab
s¶
=¶
Ward Identity
Second Piola-Kirchoff stress tensor.
7/18/05 Princeton Elasticity Lectures
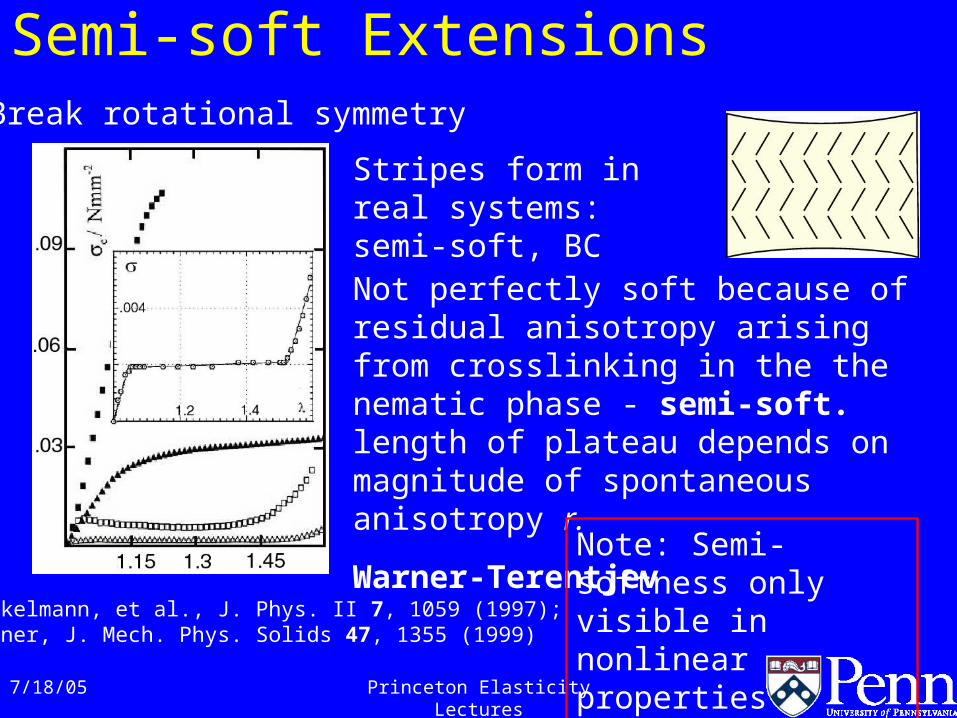
Semi-soft Extensions
Not perfectly soft because of residual anisotropy arising from crosslinking in the the nematic phase - semi-soft. length of plateau depends on magnitude of spontaneous anisotropy r.
Warner-Terentjev
Stripes form in real systems: semi-soft, BC
Break rotational symmetry
Finkelmann, et al., J. Phys. II 7, 1059 (1997);Warner, J. Mech. Phys. Solids 47, 1355 (1999)
Note: Semi-softness only visible in nonlinear properties
7/18/05 Princeton Elasticity Lectures
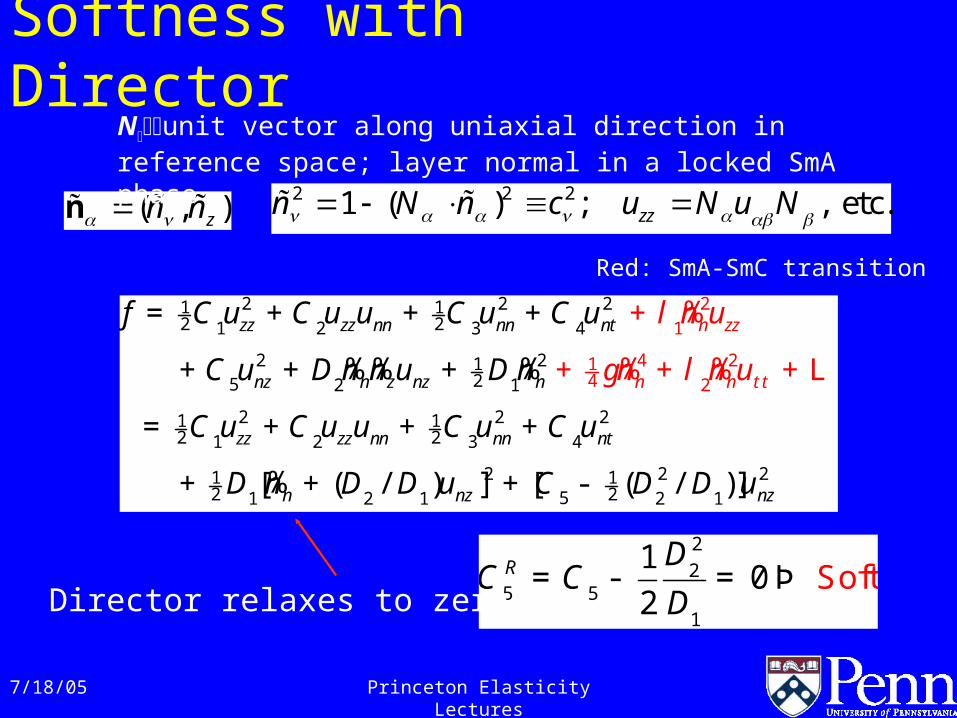
Softness with Director
2 2 21 12 21 2 3 4
2 2125 2 1
2 2 21 12 21 2 3 4
2
21
4 214 2
2 21 12 251 2 1 2 1
[ ( / ) ] [ ( / )]
zz zz
z z z
zz zz
zz
z z
n u
gn
f C u C u u C u C u
C u D n n u D n
C u C u u C u C u
D n D D u C D u
u
D
n
n
n n tt
nn nn nt
n n n n
nn nn nt
n n n
l
l
+
+ +
= + + +
+ + +
= + + +
+ + + -
+
%
% %
%
L%% %
22
5 51
10
2R D
C CD
Soft= - = ÞDirector relaxes to zero
( , )zn n n
Nunit vector along uniaxial direction in reference space; layer normal in a locked SmA phase
2 2 21 ( ) ; , etc.zzn N n c u N u N
Red: SmA-SmC transition
Recommended








![Discontinuous Galerkin Methods for Nonlinear Elasticity · In this paper we draw from the discontinuous Galerkin method presented in [22] for linear elasticity to formulate a class](https://img.dokumen.tips/doc/110x75/5e6b4b6e1c668e25df641ef5/discontinuous-galerkin-methods-for-nonlinear-elasticity-in-this-paper-we-draw-from.jpg)








