
KARNATAK LAW SOCIETY’S
GOGTE INSTITUTE OF TECHNOLOGY
UDYAMBAG, BELAGAVI-590008
(An Autonomous Institution under Visvesvaraya Technological University, Belagavi)
(APPROVED BY AICTE, NEW DELHI)
Department of Mechanical Engineering
Scheme and Syllabus (2016 Scheme)
2nd
Semester M.Tech. Machine Design
INSTITUTION VISION
Gogte Institute of Technology shall stand out as an institution of excellence in technical education and
in training individuals for outstanding caliber, character coupled with creativity and entrepreneurial
skills.
MISSION
To train the students to become Quality Engineers with High Standards of Professionalism and Ethics
who have Positive Attitude, a Perfect blend of Techno-Managerial Skills and Problem solving ability
with an analytical and innovative mindset.
QUALITY POLICY
Imparting value added technical education with state-of-the-art technology in a congenial,
disciplined and a research oriented environment.
Fostering cultural, ethical, moral and social values in the human resources of the institution.
Reinforcing our bonds with the Parents, Industry, Alumni, and to seek their suggestions for
innovating and excelling in every sphere of quality education.
DEPARTMENT VISION
To emerge as a center of excellence in technical education and research by moulding students with
techno managerial skills coupled with ethics and to cater to the needs of the industry and society in
general.
MISSION
To impart value based education and to promote research and training in frontier areas to face the
challenges in the changing global scenario; to provide impetus to industry institute relation, to imbibe
social, ethical, managerial and entrepreneurial values in students.
PROGRAM EDUCATIONAL OBJECTIVES (PEOs)
1. The graduates will acquire core competence in basic science and mechanical engineering
fundamentals necessary to formulate, analyze and solve engineering problems and to pursue
advanced study or research.
2. The graduates will engage in the activities that demonstrate desire for ongoing personal and
professional growth and self-confidence to adapt to rapid and major changes.
3. The graduates will maintain high professionalism and ethical standards, effective oral and
written communication skills, work as part of teams on multi-disciplinary projects under diverse
professional environments and relate engineering issues to the society, global economy and to
emerging technologies.

PROGRAM OUTCOMES (POs)
1. Scholarship of Knowledge:
Graduates shall acquire in-depth knowledge in machine design and update the same, integrating
existing and updated knowledge in global perspective.
2. Critical Thinking:
Graduates shall possess ability for independent judgement based on critical analysis and also for
synthesis of information for extensive research in the area of specialization.
3. Problem Solving:
Graduates shall conceptualize through lateral thinking and obtain feasible and optimal solutions
for engineering problems considering societal and environmental requirements.
4. Research Skill:
Graduates shall review relevant literature, apply appropriate research methodologies, working
individually or as a team contributing to the advancement of domain knowledge
5. Usage of modern tools:
Graduates shall be able to adopt modern techniques, analytical tools and softwares for complex
engineering solutions.
6. Collaborative and Multidisciplinary work:
Graduates shall be able to engage in collaborative multidisciplinary scientific research for
decision making through rational analysis.
7. Project Management and Finance:
Graduates shall be able to apply engineering and management principles for efficient project
management considering economical and financial factors.
8. Communication:
Graduates shall possess communication skills to comprehend, document and present effectively
to the engineering community and society at large.
9. Life-long Learning:
Graduates shall engage in lifelong learning with motivation and commitment for professional
advancement.
10. Ethical Practices and Social Responsibility:
Graduates shall imbibe the professional ethics and integrity for sustainable development of
society.
11. Independent and Reflective Learning:
Graduate shall be able to introspect and apply corrections.
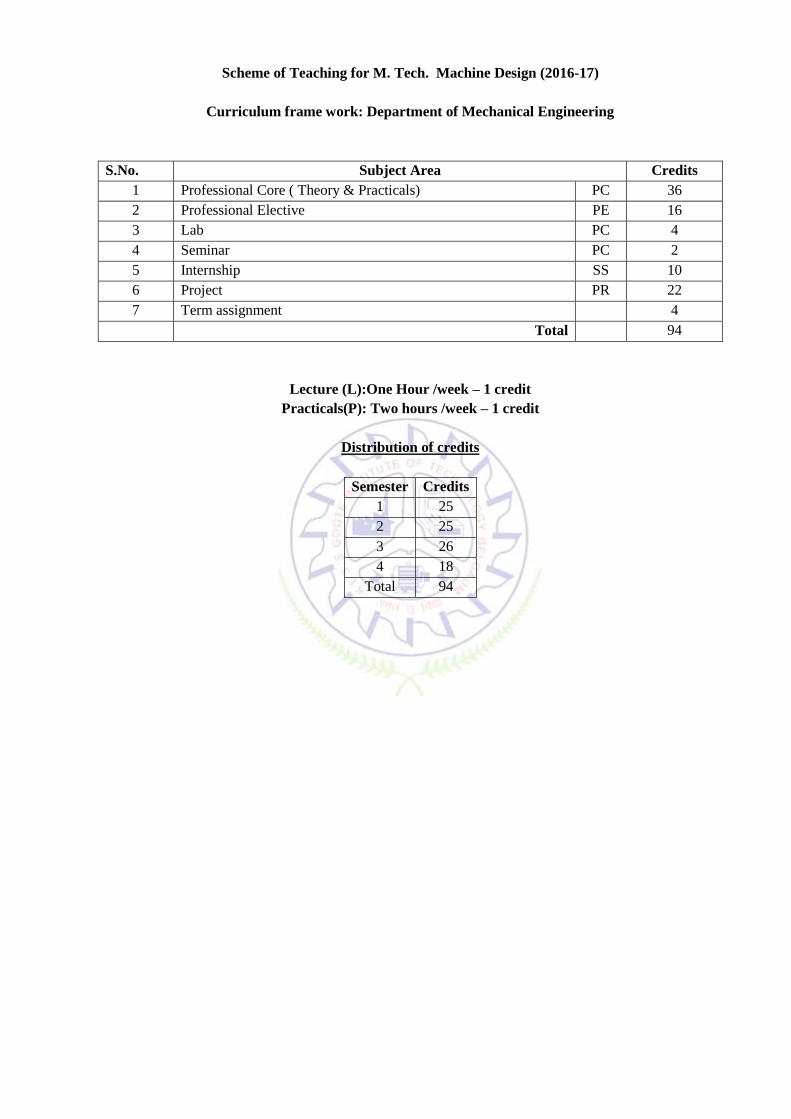
Scheme of Teaching for M. Tech. Machine Design (2016-17)
Curriculum frame work: Department of Mechanical Engineering
S.No. Subject Area Credits
1 Professional Core ( Theory & Practicals) PC 36
2 Professional Elective PE 16
3 Lab PC 4
4 Seminar PC 2
5 Internship SS 10
6 Project PR 22
7 Term assignment 4
Total 94
Lecture (L):One Hour /week – 1 credit
Practicals(P): Two hours /week – 1 credit
Distribution of credits
Semester Credits
1 25
2 25
3 26
4 18
Total 94
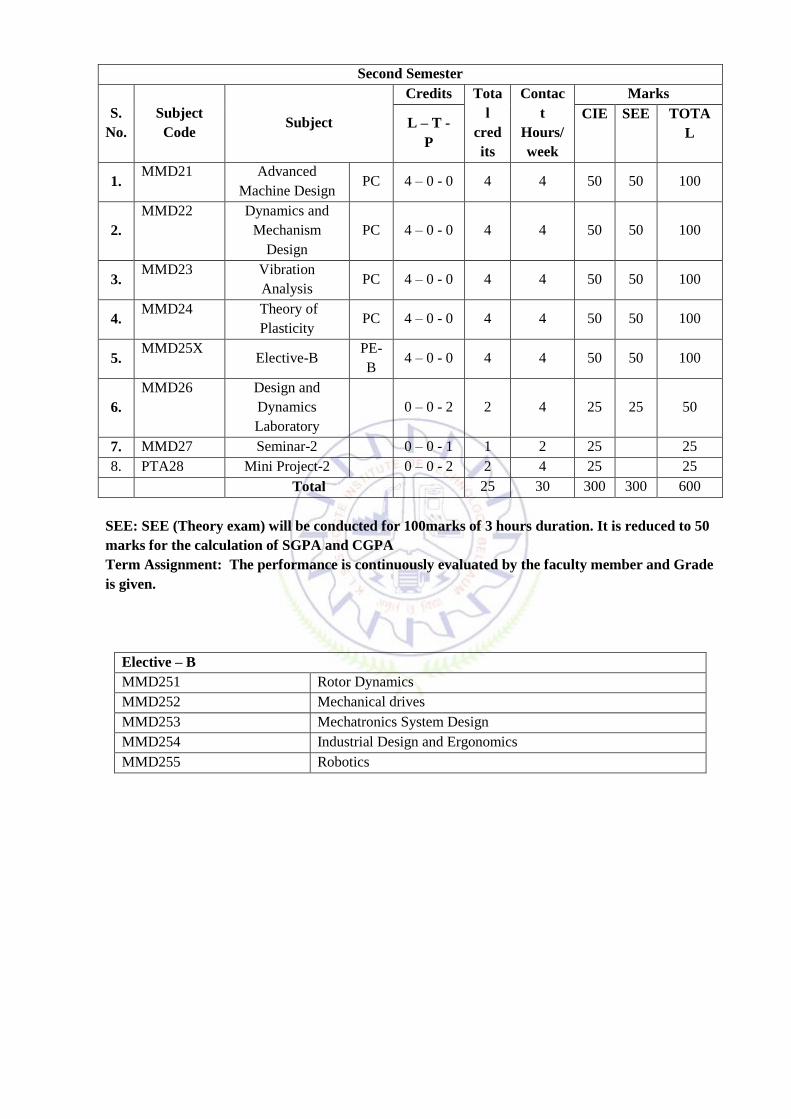
Second Semester
S.
No.
Subject
Code Subject
Credits Tota
l
cred
its
Contac
t
Hours/
week
Marks
L – T -
P
CIE SEE TOTA
L
1. MMD21 Advanced
Machine Design PC 4 – 0 - 0 4 4 50 50 100
2.
MMD22 Dynamics and
Mechanism
Design
PC 4 – 0 - 0 4 4 50 50 100
3. MMD23 Vibration
Analysis PC 4 – 0 - 0 4 4 50 50 100
4. MMD24 Theory of
Plasticity PC 4 – 0 - 0 4 4 50 50 100
5. MMD25X
Elective-B PE-
B 4 – 0 - 0 4 4 50 50 100
6.
MMD26 Design and
Dynamics
Laboratory
0 – 0 - 2 2 4 25 25 50
7. MMD27 Seminar-2 0 – 0 - 1 1 2 25 25
8. PTA28 Mini Project-2 0 – 0 - 2 2 4 25 25
Total 25 30 300 300 600
SEE: SEE (Theory exam) will be conducted for 100marks of 3 hours duration. It is reduced to 50
marks for the calculation of SGPA and CGPA
Term Assignment: The performance is continuously evaluated by the faculty member and Grade
is given.
Elective – B
MMD251 Rotor Dynamics
MMD252 Mechanical drives
MMD253 Mechatronics System Design
MMD254 Industrial Design and Ergonomics
MMD255 Robotics

ADVANCED MACHINE DESIGN
Course Code MMD21 Credits 4
Course type PC CIE Marks 50 marks
Hours/week: L-T-P 4-0-0 SEE Marks 50 marks
Total Hours: 50 SEE Duration 3 Hours for
100 marks
Course learning objectives
1. Understand different modes of failures, application of theories of failures.
2. Life estimation, stress calculation of component subjected to finite and infinite life.
3. Introduction to fracture mechanics and stress intensity factor.
4. Understand different damage tolerant theories used to estimate life for variable amplitude
fatigue loading.
5. Types of surface failures, stresses for different type of contacts.
Pre-requisites : Mechanics of Materials, Design of Machine Elements
Unit – I 10 Hours
Introduction and fatigue of materials: Role of failure prevention analysis in mechanical design,
Modes of mechanical failure, Review of failure theories for ductile and brittle materials including
Mohr’s theory and modified Mohr’s theory, Numerical examples. Introductory concepts, High cycle
and low cycle fatigue, Fatigue design models, Fatigue design methods, Fatigue design criteria, Fatigue
testing, Test methods and standard test specimens, Fatigue fracture surfaces and macroscopic features,
Fatigue mechanisms and microscopic features.
Self learning topics: Fatigue mechanism and microscopic features.
Unit – II 10 Hours
Stress-life (S-N) approach and strain-life (ε-N) approach: S-N curves, Statistical nature of fatigue
test data, General S-N behavior, Mean stress effects, Different factors influencing S-N behavior, S-N
curve representation and approximations, Constant life diagrams, Fatigue life estimation using S-N
approach. Monotonic stress-strain behavior, Strain controlled test methods, Cyclic stress-strain
behavior, Strain based approach to life estimation, Determination of strain life fatigue properties, mean
stress effects, Effect of surface finish, Life estimation by S-N approach.
Self learning topics: Effect of surface finish on S-N life.
Unit - III 10 Hours
LEFM approach: LEFM concepts, Crack tip plastic zone, Fracture toughness, Fatigue crack growth,
Mean stress effects, Crack growth life estimation. Definitions of types of fracture and failure,
Introduction to stress intensity factor and strain energy release rate, stress intensity approach, Notch
strain analysis and the strain – life approach, Neuber’s rule, Glinka’s rule, Paris law.
Residual Stress: Introduction, production of residual stresses & fatigue resistance, relaxation of
residual stresses, measurement of residual stresses, stress intensity factors for residual stresses,
applications.
Self learning topics: Basic study of residual stresses and applications.

Unit - IV 10 Hours
Fatigue from variable amplitude loading: Spectrum loads and cumulative damage, Damage
quantification and the concepts of Damage fraction and accumulation, Cumulative damage theories,
Load interaction and sequence effects, Cycle counting methods, Life estimation using stress life
approach.
Unit - V 10 Hours
Surface failure: Introduction, Surface geometry, Mating surface, Friction, Adhesive wear, Abrasive
wear, Corrosion wear, Surface fatigue spherical contact, Cylindrical contact, General contact, Dynamic
contact stresses, Surface fatigue strength.
Self learning topics: Basic study of residual stresses and applications.
Books
1. R. I. Stephens, A. Fatemi, R. R. Stephens, H. Fuchs, Metal Fatigue in Engineering, John Wiley
Newyork, 2nd
edition, 2001.
2. J. A. Collins, J Wiley, Failure of Materials in Mechanical Design, Newyork, 1992.
3. R. L. Norton, Machine Design, Pearson Education India, 2000.
4. S. Suresh, Fatigue of Material, Cambridge University Press, 1998.
5. J. A. Benantine, Fundamentals of Metal Fatigue Analysis, Prentice Hall, 1990.
6. Fatigue and Fracture, ASM Hand Book, Vol 19, 2002.
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Classify and explain the state of the art design methodology namely design by
analysis and damage tolerant design [L2]
2. Discuss an overview of mechanical behavior includes tensile, fatigue and creep
behavior of materials [L2]
3. Illustrate the micro mechanisms of brittle and ductile fracture [L3]
4. Examine the fatigue and fracture behavior of materials [L4]
5. Use the knowledge for failure analysis and case studies [L3]
Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall possess ability for independent judgment based on critical analysis
and also for synthesis of information for extensive research in the area of
specialization. [PO2]
3.
Graduates shall review relevant literature, apply appropriate research methodologies,
working individually or as a team contributing to the advancement of domain
knowledge.
[PO4]
4. Graduates shall engage in lifelong learning with motivation and commitment for
professional advancement. [PO9]
Course delivery methods Assessment methods
1. Black Board Teaching 1. Internal Assessment
2. Power Point Presentation 2. Assignment
3. Working Models 3. Seminar
4. Videos 4. Mini-project
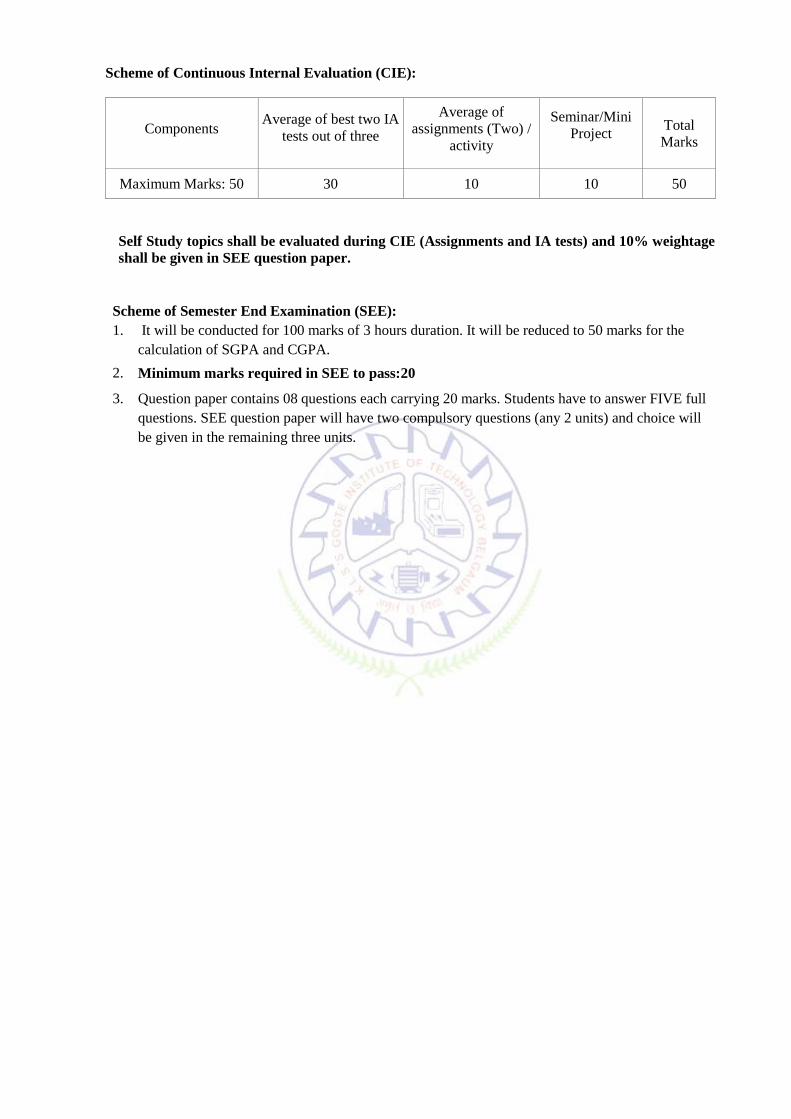
Scheme of Continuous Internal Evaluation (CIE):
Components Average of best two IA
tests out of three
Average of
assignments (Two) /
activity
Seminar/Mini
Project
Total
Marks
Maximum Marks: 50 30 10 10 50
Self Study topics shall be evaluated during CIE (Assignments and IA tests) and 10% weightage
shall be given in SEE question paper.
Scheme of Semester End Examination (SEE):
1. It will be conducted for 100 marks of 3 hours duration. It will be reduced to 50 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass:20
3. Question paper contains 08 questions each carrying 20 marks. Students have to answer FIVE full
questions. SEE question paper will have two compulsory questions (any 2 units) and choice will
be given in the remaining three units.

DYNAMICS AND MECHANISM DESIGN
Course Code MMD22 Credits 4
Course type PC CIE Marks 50 marks
Hours/week: L-T-P 4-0-0 SEE Marks 50 marks
Total Hours: 50 SEE Duration 3 Hours for
100 marks
Course learning objectives
1. Understand different methods of velocity analysis of a mechanism.
2. To include dynamics considerations in the design of mechanisms for engineering applications.
3. Understand various methods for synthesizing a mechanism.
4. Formulation of Equations of motion for various systems.
5. Understand basic concept of synthesizing a cam.
Pre-requisites : Kinematics and Dynamics of Machine
Unit – I 10 Hours
Geometry of Motion: Introduction, analysis and synthesis, Mechanism terminology, planar, Spherical
and spatial mechanisms, mobility, Grashoff`s law, Equivalent mechanisms, Unique mechanisms,
Kinematic analysis of plane mechanisms: Auxiliary point method using rotated velocity vector, Hall -
Ault auxiliary point method, Goodman's indirect method.
Self learning topics: Equivalent mechanisms, unique mechanisms.
Unit – II 10 Hours
Generalized Principles of Dynamics: Fundamental laws of motion, Generalized coordinates,
Configuration space, Constraints, Virtual work, principle of virtual work, Energy and momentum,
Work and kinetic energy, Equilibrium and stability, Kinetic energy of a system, Angular momentum,
generalized momentum. Lagrange's Equation: Lagrange's equation from D'Alembert's principles,
Examples Hamilton’s equations, Hamilton's principle, Lagrange's, equation from Hamilton’s principle,
Derivation of Hamilton’s equations, Examples.
Unit – III 10 Hours
Synthesis of Linkages: Type, number, and dimensional synthesis, Function generation, Path
generation and Body guidance, Precision positions, Structural error, Chebychev spacing, Two position
synthesis of slider crank mechanisms, Crank-rocker mechanisms with optimum transmission angle
Motion Generation: Poles and relative poles, Location of poles and relative poles, polode, Curvature,
Inflection circle.
Self learning topics: Location of poles and relative poles, polode, Curvature, Inflection circle.
Unit – IV 10 Hours
Graphical Methods of Dimensional Synthesis: Two position synthesis of crank and rocker
mechanisms, Three position synthesis, Four position synthesis (point precision reduction) Overlay
method, Coupler curve synthesis, Cognate linkages.
Analytical Methods of Dimensional Synthesis: Freudenstein's equation for four bar mechanism and
slider crank mechanism, Examples, Bloch's method of synthesis, Analytical synthesis using complex
algebra.
Unit – V 10 Hours
Analysis of Cams: Basic curves, pressure, angle-Cam size determination, Cam profile determination-
Analytical and graphical. Advanced curves-combination of curves, Polydyne cams. Cam dynamics:
Cam force analysis- Dynamics of high speed cam system, source of vibration, Follower response-
Phase plane method, Johnson’s Numerical Analysis, Position error-Jump and cross-over shock, Spring
surge and wind up.
Spatial Mechanisms: Introduction, Position analysis problem, Velocity and acceleration analysis,
Eulerian angles.
Self learning topics: Position error-Jump and cross-over shock, spring surge and wind up of cams.
Books
1. K. J. Waldron & G. L. Kinzel , Kinematics, Dynamics and Design of Machinery, Wiley India,
2007
2. D. T. Greenwood, “Classical Dynamics”, Prentice Hall of India, 1988.
3. J. E. Shigley, Theory of Machines and Mechanism, McGraw-Hill, 1995.
4. A. G. Ambekar, Mechanism and Machine Theory, PHI, 2007.
5. Ghosh and Mallick, Theory of Mechanism and Mechanism, East West press, 2007.
6. D. H. Myszka, Machines and Mechanisms, Pearson Education, 2005.
7. A. R. Holowenko, Dynamics of Machinery, Wiley, 2007.
8. A. S. Hall, Kinematics and Linkage Design, Prentice Hall, 2007.
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Examine the velocities of different mechanism in engineering field [L4]
2. Design different mechanism based on the given variables [L6]
3. Compare various position of mechanism for a given variables [L4]
4. Design a cam profile for the given data [L6]
5. Examine the various parameters of a spatial mechanism [L4]
Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall possess ability for independent judgment based on critical analysis
and also for synthesis of information for extensive research in the area of
specialization. [PO2]
3.
Graduates shall review relevant literature, apply appropriate research methodologies,
working individually or as a team contributing to the advancement of domain
knowledge.
[PO4]
4. Graduates shall possess communication skills to comprehend, document and present
effectively to the engineering community and society at large [PO8]
Course delivery methods Assessment methods
1. Black Board Teaching 1. Internal Assessment
2. Power Point Presentation 2. Assignment
3. Working Models 3. Seminar
4. Videos 4. Mini-project
Scheme of Continuous Internal Evaluation (CIE):
Components Average of best two
IA tests out of three
Average of
assignments (Two) /
activity
Seminar/Mini
Project
Total
Marks
Maximum Marks: 50 30 10 10 50
Self Study topics shall be evaluated during CIE (Assignments and IA tests) and 10% weightage
shall be given in SEE question paper.
Scheme of Semester End Examination (SEE):
1. It will be conducted for 100 marks of 3 hours duration. It will be reduced to 50 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass:20
3. Question paper contains 08 questions each carrying 20 marks. Students have to answer FIVE full
questions. SEE question paper will have two compulsory questions (any 2 units) and choice will
be given in the remaining three units.

VIBRATION ANALYSIS
Course Code MMD23 Credits 4
Course type PC CIE Marks 50 marks
Hours/week: L-T-P 4-0-0 SEE Marks 50 marks
Total Hours: 50 SEE Duration 3 Hours for
100 marks
Course learning objectives
1. To present a working knowledge of vibrations and enabling the students to analyze vibrating
systems ranging from single degree of freedom system to multi degrees of freedom systems
such as spring mass system to vibrations in advanced systems such as internal combustion
engines and continuous systems.
2. To teach students how to use the theoretical principles of vibration and vibration analysis
techniques for the practical solution of vibration problems.
3. To enable the student to fully understand the importance of vibrations in mechanical design of
machine parts that operate in vibratory conditions.
4. To present students with theoretical background and engineering applications of vibration
problems.
5. To teach students the importance of nonlinear, random and transient vibrations in the design of
vibration problems.
Pre-requisites : Introduction to Vibration
Unit - I 10 Hours
System with single degree of freedom: Review of free and forced vibration with or without damping,
transmissibility.
System with more than one degree of freedom: Systems with two degree of freedom, undamped
vibration absorbers, generalized co-ordinates and coordinates coupling, orthogonally of natural modes.
Self learning topics: Knowledge of principles of undamped, damped and forced vibrations
Unit - II 10 Hours
Vibration Control: Vibration isolation and motion isolation for harmonic excitation, practical aspects
of vibration analysis, shock isolation, Dynamic vibration absorbers, Vibration dampers.
Vibration Measurement and Applications: Introduction, Transducers, Vibration pickups, Frequency
measuring instruments, Vibration exciters, Signal analysis.
Unit - III 10 Hours
Continuous Systems: Transverse vibration of string, longitudinal and torsional vibrations of rods,
Euler equations for beams.
Modal analysis and Condition Monitoring: Dynamic Testing of machines and Structures,
Experimental Modal analysis, Machine Condition monitoring and diagnosis.
Self learning topics: Knowledge of different types of continuous systems
Unit - IV 10 Hours
Transient Vibration of single Degree-of freedom systems: Impulse excitation, arbitrary excitation,
Laplace transforms formulation, Pulse excitation and rise time, Shock response spectrum, Shock
isolation.
Introduction to Random vibration: Mathematical descriptions of stochastic Process, stationary and
ergodicity, Gaussian random process, correlation function and power spectral density, Introduction to
diagnostic maintenance and signature analysis.

Unit - V 10 Hours
Non-Linear Vibrations: Non Linear Vibrations: Introduction, Sources of nonlinearity, Qualitative
analysis of nonlinear systems. Phase plane, Conservative systems, Stability of equilibrium, Method of
isoclines, Perturbation method, Method of iteration, Self-excited oscillations.
Books
1. S. Graham Kelly, Fundamentals of Mechanical Vibration, Tata McGraw-Hill, 2000.
2. S. S. Rao, Mechanical Vibrations, Pearson Education, 4th Edition.
3. D. Hartog, Mechanical Vibration, Tata McGraw Hill.
4. Meirovitch, Elements of Vibration Analysis, Tata McGraw Hill.
5. S. Graham Kelly, Mechanical Vibrations, Schaum’s Outlines, Tata McGraw Hill, 2007.
6. C. Sujatha, Vibrations and Acoustics – Measurements and signal analysis, Tata McGraw Hill,
2010.
7. P. Srinivasn, Mechanical vibration Analysis, Tata McGraw Hill.
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Explain different types of vibration, forcing functions and applications of
vibrations such as isolation and control. [L2]
2. Demonstrate the vibration problems. [L3]
3. Design major and realistic vibration problems in mechanical engineering design. [L6]
4. Demonstrate the importance of vibration in a particular application and solution to
the same. [L3]
5. Explain the nonlinear, random and transient nature of vibrations. [L2]
Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall possess ability for independent judgment based on critical analysis
and also for synthesis of information for extensive research in the area of
specialization. [PO2]
3.
Graduates shall conceptualise through lateral thinking and obtain feasible and
optimal solutions for engineering problems considering societal and environmental
requirements. [PO3]
3. Graduates shall be able to adopt modern techniques, analytical tools and softwares
for complex engineering solutions [PO5]
4. Graduates shall engage in lifelong learning with motivation and commitment for
professional advancement. [PO9]
Course delivery methods Assessment methods
1. Black Board Teaching 1. Internal Assessment
2. Power Point Presentation 2. Assignment
3. Working Models 3. Seminar
4. Videos 4. Mini-project

Scheme of Continuous Internal Evaluation (CIE):
Components Average of best two IA
tests out of three
Average of
assignments (Two) /
activity
Seminar/Mini
Project
Total
Marks
Maximum Marks: 50 30 10 10 50
Self Study topics shall be evaluated during CIE (Assignments and IA tests) and 10% weightage
shall be given in SEE question paper.
Scheme of Semester End Examination (SEE):
1. It will be conducted for 100 marks of 3 hours duration. It will be reduced to 50 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass:20
3. Question paper contains 08 questions each carrying 20 marks. Students have to answer FIVE full
questions. SEE question paper will have two compulsory questions (any 2 units) and choice will
be given in the remaining three units.
THEORY OF PLASTICITY
Course Code MMD24 Credits 4
Course type PC CIE Marks 50 marks
Hours/week: L-T-P 4-0-0 SEE Marks 50 marks
Total Hours: 50 SEE Duration 3 Hours for
100 marks
Course learning objectives
1. To determine the elastic behavior of solid bodies subjected to various types of loading.
2. To teach students stress strain graph of ductile and brittle materials by experiment.
3. To explain various stress strain relationships characterizing elastic plastic behavior.
4. To develop mathematical expressions for various yield criterion and stress strain relation.
5. To relate macroscopic behavior of plasticity and yielding to microscopic slip line theory.
Pre-requisites : Mechanics of Materials
Unit – I 10 Hours
Introduction: Definition and scope of the subject, Brief review of elasticity, Octahedral normal and
shear stresses, Spherical and deviatric stress, Invariance in terms of the deviator stresses, Idealized
stress-strain diagrams for different material models, Engineering and natural strains, Mathematical
relationships between true stress and true strains, Cubical dilation, finite strains co- efficient Octahedral
strain, Strain rate and the strain rate tensor.
Self Learning Topics: Brief review of elasticity, Octahedral normal and shear stresses, Spherical and
deviatric stress.
Unit – II 10 Hours
Material Models, Stress-strain relations, Yield criteria for ductile metal, Von Misses, Tresca, Yield
surface for an Isotropic Plastic materials, Stress space, Experimental verification of Yield criteria, Yield
criteria for an anisotropic material, flow rule normality.
Self Learning Topics: Material Models, Stress-strain relations, Yield criteria for ductile metal.
Unit – III 10 Hours
Plasticity analysis: Strain Relations, Plastic stress-strain relations, Prandtl Roeuss, Saint Venant, Levy
- Von Misses, Experimental verification of the Prandtl-Rouss equation, Yield locus, Symmetry
convexity, Normality rule. Upper and lower bound theorems and corollaries. Application to problems:
Uniaxial tension and compression, Stages of plastic yielding.
Unit – IV 10 Hours
Bending of beams: Torsion of rods and tubes, nonlinear bending and torsion equations, Simple forms
of indentation problems using upper bounds, Application of Metal forming: Extrusion, Drawing,
Rolling and Forging. Problems of metal forming, extrusion, drawing, rolling and forging.
Unit – V 10 Hours
Slip line theory: Introduction, basic equations for incompressible two dimensional flows, continuity
equations, Stresses in conditions of plain strain convention for slip lines, geometry of slip lines,
properties of slip lines.
Books
1. R. A. C. Slater, Engineering Plasticity - Theory and Application to Metal Forming Process,
McMillan Press ltd.
2. S. Singh, Theory of Plasticity and Metal forming Process, Khanna Publishers, Delhi.
3. Johnson and Mellor, Plasticity for Mechanical Engineers, Van Nostrand,1966.
4. Hoffman and Sachs, Theory of Plasticity, LLC, 2012.
5. Chakraborty, Theory of plasticity, Butterworth, McGraw Hill 2006.
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Define octahedral normal and shear stresses Spherical. [L1]
2. Experimentally investigate yield criteria’s for ductile metal. [L4]
3. Discuss the theory of metal working. [L2]
4. Describe different stages of plastic yielding. [L2]
5. Explain the concept of slip line field theory. [L2]
Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall possess ability for independent judgment based on critical analysis
and also for synthesis of information for extensive research in the area of
specialization. [PO2]
3. Graduates shall engage in lifelong learning with motivation and commitment for
professional advancement. [PO9]
Course delivery methods Assessment methods
1. Black Board Teaching 1. Internal Assessment
2. Power Point Presentation 2. Assignment
3. Working Models 3. Seminar
4. Videos 4. Mini-project
Scheme of Continuous Internal Evaluation (CIE):
Components Average of best two
IA tests out of three
Average of
assignments (Two) /
activity
Seminar/Mini
Project
Total
Marks
Maximum Marks: 50 30 10 10 50
Self Study topics shall be evaluated during CIE (Assignments and IA tests) and 10% weightage
shall be given in SEE question paper.
Scheme of Semester End Examination (SEE):
1. It will be conducted for 100 marks of 3 hours duration. It will be reduced to 50 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass:20

ROTOR DYNAMICS
Course Code MMD251 Credits 4
Course type PE CIE Marks 50 marks
Hours/week: L-T-P 4-0-0 SEE Marks 50 marks
Total Hours: 50 SEE Duration 3 Hours for
100 marks
Course learning objectives
1. To teach the students theory of fluid film lubrication, boundary conditions, stiffness and
damping coefficients.
2. To present the concepts of different types of rotors in rotor bearing system, fluid film lubrication
and stability and instability of rotors.
3. To teach the students to use the theoretical principles of rotor dynamics such as matrix methods
and finite element methods for predicting the stability of the rotor.
4. To allow the students to model bearings, shafts and rotor stages to predict instability like
whirling including gyroscopic and corialis effect.
5. To introduce the importance of critical speed in rotor dynamics and different analytical methods
for determining the same.
Pre-requisites : Mechanical Vibrations
Unit - I 10 Hours
Fluid Film Lubrication: Basic theory of fluid film lubrication, derivation of generalized Reynolds
equations, boundary conditions, fluid film stiffness and Damping coefficients, stability and dynamic
response for hydrodynamic journal bearing.
Stability of Flexible Shafts: Introduction, equation of motion of a flexible shaft With rigid support,
radial elastic friction forces, rotary friction, friction Independent of velocity, friction dependent on
frequency, different shaft stiffness Constant, gyroscopic effects, non-linear problems of large
deformation Applied forces, instability of rotors in magnetic field
Unit - II 10 Hours
Critical Speed: Dunkerley's method, Rayleigh's method and Stodola's method.
Rotor Bearing System: Instability of rotors due to the effect of hydrodynamic oil layer in the bearings,
support flexibility, simple model with one concentrated mass at the center.
Self learning topics: Torsional vibrations
Unit - III 10 Hours
Turbo rotor System Stability by Transfer Matrix Formulation: The general turbo rotor system,
development of element transfer matrices, the matrix differential equation, effect of shear and rotary
inertia, the elastic rotors supported in bearings, numerical solutions.
Self learning topics: Matrix method of vibrational analysis
Unit - IV 10 Hours
Turbo rotor System Stability by Finite Element Formulation: The general turbo rotor system,
generalized forces and co-ordinates system assembly element matrices, consistent mass matrix
formulation, lumped mass model, lineared model for journal bearings.
Finite element formulation of different vibrating systems
Unit - V 10 Hours
Turbo rotor System Stability by Finite Element Formulation: System dynamic equations for
stability analysis, non-dimensional stability analysis, unbalance response and transient analysis.
Blade Vibration: Centrifugal effect, transfer matrix and finite element approaches.

Books
1. Peztel, Lockie, Matrix methods of Elastomechanics, McGraw Hill.
2. J. S. Rao, Rotor dynamics, New Age, New Delhi, 3rd
Edition, 1996.
3. M. J. Goodwin, U. Hyman, Dynamics of Rotor-Bearing Systems, Sydney, 1989.
4. Cameron , Principles of Lubrication, Longmans.
5. Bolotin, Nonconservative problems of the theory of elastic stability, Pergamon.
6. Y. Timosenko, Vibration Problems in Engineering, Von Nostrand.
7. Zienkiewicz, The Finite Element Method, McGraw Hill.
8. Childs and Dara, Turbomachinery Rotor Dynamics- Phenomena, Modeling and Analysis, John
Wiley and Sons, 1993.
9. C.W. Lee, Vibration Analysis of Rotors, Kluwer Academic Publishers, London, 1993.
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Demonstrate different types of rotors bearing systems and modeling of the same
using rotor dynamic principles. [L3]
2. Explain the rotor dynamic problems in actual practice. [L2]
3. Solve major and realistic rotor dynamic problems in Turbomachines. [L3]
4. Evaluate the issue of blade vibrations on the design of rotor in Turbomachines. [L5]
5. Use the transfer matrix and finite element formulations in the design of rotor
bearing systems. [L3]
Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall possess ability for independent judgment based on critical analysis
and also for synthesis of information for extensive research in the area of
specialization. [PO2]
3.
Graduates shall conceptualise through lateral thinking and obtain feasible and
optimal solutions for engineering problems considering societal and environmental
requirements.
[PO3]
4. Graduates shall be able to adopt modern techniques, analytical tools and softwares
for complex engineering solutions. [PO5]
5. Graduates shall engage in lifelong learning with motivation and commitment for
professional advancement. [PO9]
Course delivery methods Assessment methods
1. Black Board Teaching 1. Internal Assessment
2. Power Point Presentation 2. Assignment
3. Working Models 3. Seminar
4. Videos 4. Mini-project
Scheme of Continuous Internal Evaluation (CIE):
Components Average of best two IA
tests out of three
Average of
assignments (Two) /
activity
Seminar/Mini
Project
Total
Marks
Maximum Marks: 50 30 10 10 50
Self Study topics shall be evaluated during CIE (Assignments and IA tests) and 10% weightage
shall be given in SEE question paper.
Scheme of Semester End Examination (SEE):
1. It will be conducted for 100 marks of 3 hours duration. It will be reduced to 50 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass:20
3. Question paper contains 08 questions each carrying 20 marks. Students have to answer FIVE full
questions. SEE question paper will have two compulsory questions (any 2 units) and choice will
be given in the remaining three units.

MECHANICAL DRIVES
Course Code MMD22 Credits 4
Course type PC CIE Marks 50 marks
Hours/week: L-T-P 4-0-0 SEE Marks 50 marks
Total Hours: 50 SEE Duration 3 Hours for
100 marks
Course learning objectives
1. To teach students the different types of transmission devices and their requirements.
2. To present a working knowledge of different types of mechanical drives such as clutches,
brakes, coupling, gears, cams etc.
3. To enable the students to use the theoretical principles of mechanical drives for the practical
solution of transmission problems.
4. To familiarize students the design of mechanical drives such as clutches, brakes, coupling,
gears, cams etc.
5. To enable the students to understand the uniform and variable speed transmission systems.
Pre-requisites : Kinematics & Dynamics of Machines
Unit – I 10 Hours
Transmission and its requirements. Matching of load and prime mover. Design of transmission
elements. Clutches and brakes. Couplings of different types.
Self learning topics: Couplings of different types.
Unit – II 10 Hours
Uniform and variable speed transmission. Toothed gears: Kinematic requirements of tooth geometry,
cycloids and involutes.
Unit – III 10 Hours
Involutes trigonometry, Gear Correction, Synthesis of Gear teeth.
Unit – IV 10 Hours
Various gears; helical, herringbone, bevel, spiral bevel, skew helical and worm gearing.
Self Learning Topics: Skew helical and worm gearing.
Unit – V 10 Hours
Fundamentals of Cam Design, torque converter a working principle and design, Programmed motion
and intermittent motion, Mechanisms of various types.
Books
1. T. J. Prabhu, Design of Transmission Systems, Private Publication, 1999.
2. N. K. Mehtha, Machine Tool Design and Numerical Control, Tata McGraw-Hill Education, 2nd
Edition, 2002.
3. J. Shigley, Mechanical Engineering Design, Mc Graw Hill, 2001.
4. R. C. Juvinall and K.M., Marshek, Fundamentals of Machine component Design, John Wiley
and Sons, 3rd
Edition, 2002.
5. V.B. Bhandari, Design of Machine Elements, Tata McGraw-Hill Publishing Company
Ltd., 1994.
6. G.M. Maitra and L.V. Prasad, Hand book of Mechanical Design, Tata McGraw-Hill, 2nd
Edition, 1985.
7. J. E. Shigley and C. R. Mischke, Mechanical Engineering Design, McGraw-Hill International
Editions, 1989.
8. R. L. Norton, Design of Machinery, McGraw-Hill Book Co., 2004.

9. B. J. Hamrock, B. Jacobson and S. R. Schmid, Fundamentals of Machine Elements, McGraw-
Hill Book Co., 1999
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Demonstrate different types of mechanical drives such as clutches, brakes, gears,
cams etc. and their requirements . [L3]
2. Identify the drive required for a particular transmission system and design the same
according to the required specifications. [L2]
3. Demonstrate the importance of mechanical drive in a particular application and
other suitable alternative drives for that application. [L3]
4. Design different types of mechanical drives such as clutches, brakes, gears, cams
etc. [L6]
Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall possess ability for independent judgment based on critical analysis
and also for synthesis of information for extensive research in the area of
specialization. [PO2]
3. Graduates shall be able to engage in collaborative multidisciplinary scientific
research for decision making through rational analysis. [PO6]
4. Graduates shall engage in lifelong learning with motivation and commitment for
professional advancement. [PO9]
Course delivery methods Assessment methods
1. Black Board Teaching 1. Internal Assessment
2. Power Point Presentation 2. Assignment
3. Working Models 3. Seminar
4. Videos 4. Mini-project
Scheme of Continuous Internal Evaluation (CIE):
Components Average of best two
IA tests out of three
Average of
assignments (Two) /
activity
Seminar/Mini
Project
Total
Marks
Maximum Marks: 50 30 10 10 50
Self Study topics shall be evaluated during CIE (Assignments and IA tests) and 10% weightage
shall be given in SEE question paper.

Scheme of Semester End Examination (SEE):
1. It will be conducted for 100 marks of 3 hours duration. It will be reduced to 50 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass:20
3. Question paper contains 08 questions each carrying 20 marks. Students have to answer FIVE full
questions. SEE question paper will have two compulsory questions (any 2 units) and choice will
be given in the remaining three units.

MECHATRONICS SYSTEM DESIGN
Course Code MMD253 Credits 4
Course type PE CIE Marks 50 marks
Hours/week: L-T-P 4-0-0 SEE Marks 50 marks
Total Hours: 50 SEE Duration 3 Hours for
100 marks
Course learning objectives
1. To introduce Mechatronics systems and teach control systems, sensors, transducers, real time
interfacing and hardware components for Mechatronics.
2. To enable the students to understand electrical actuation systems such as electrical systems,
mechanical switches, solid-state switches, solenoids, DC and AC motors and stepper motors.
3. To introduce the students mechanical system building blocks, electrical system building blocks
and thermal system building blocks for developing mathematical models for different systems.
4. To present the students introduction, fabrication, design and packaging of MEMS and
Microsystems.
5. To teach students the advanced applications in Mechatronics.
Unit - I 10 Hours
Introduction: Definition and Introduction to Mechatronic Systems. Modeling and simulation of
physical systems overview of Mechatronic products and their functioning, measurement systems.
Control Systems, simple controllers. Study of Sensors and Transducers: Pneumatic and Hydraulic
Systems, Mechanical Actuation System, Electrical Actual Systems, Real time interfacing and Hardware
components for Mechatronics.
Self Learning Topics: Functions of different parts of Mechatronic system
Unit - II 10 Hours
Electrical Actuation Systems: Electrical systems, Mechanical switches, Solid-state switches,
solenoids, DC and AC motors, Stepper motors.
System Models: Mathematical models-mechanical system building blocks, electrical system building
blocks, thermal system building blocks, electromechanical systems, hydro-mechanical systems,
pneumatic systems.
Self learning topics: Introduction to different system building blocks
Unit - III 10 Hours
Signal Conditioning: Signal conditioning, the operational amplifier, Protection, Filtering,
Wheatstone Bridge, Digital signals, Multiplexers, Data Acquisition, Introduction to digital system
processing, pulse-modulation.
Unit - IV 10 Hours
MEMS and Microsystems: Introduction, Working Principle, Materials for MEMS and Microsystems,
Micro System fabrication process, Overview of Micro Manufacturing, Micro system Design, and Micro
system Packaging.
Unit - V 10 Hours
Data Presentation Systems: Basic System Models, System Models, Dynamic Responses of
System.
Advanced Applications in Mechatronics: Fault Finding, Design, Arrangements and Practical Case
Studies, Design for manufacturing, User-friendly design.

Books
1. W. Bolton, Mechatronics, Addison Wesley Longman Publication, 1999
2. HSU, MEMS and Microsystems design and manufacture, Tata McGraw-Hill Education, 2002
3. Kamm, Understanding Electro-Mechanical Engineering an Introduction to Mechatronics IEEE
Press, 1st Edition ,1996.
4. Shetty and Kolk, Mechatronics System Design, Cengage Learning, 2010.
5. Mahalik, Mechatronics, Tata McGraw-Hill Education, 2003.
6. HMT, Mechatronics, Tata McGraw-Hill Education, 1998.
7. B. Michel, Histand and David and Alciatore, Introduction to Mechatronics and Measurement
Systems, Mc Grew Hill, 2002.
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Explain Mechatronics systems, control systems, sensors, transducers, real time
interfacing and hardware components for Mechatronics. [L2]
2.
Use electrical actuation systems such as electrical systems, mechanical switches,
solid-state switches, solenoids, DC and AC motors and stepper motors in design of
Mechatronics systems. [L3]
3.
Use mechanical system building blocks, electrical system building blocks and
thermal system building blocks for developing mathematical models for different
systems. [L3]
4. Explain fabrication, design and packaging of MEMS and Microsystems. [L2, L6]
5. Identify advanced applications in Mechatronics. [L2]
Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall possess ability for independent judgment based on critical analysis
and also for synthesis of information for extensive research in the area of
specialization. [PO2]
3.
Graduates shall conceptualise through lateral thinking and obtain feasible and
optimal solutions for engineering problems considering societal and environmental
requirements.
[PO3]
4. Graduates shall be able to adopt modern techniques, analytical tools and softwares
for complex engineering solutions. [PO5]
5. Graduates shall engage in lifelong learning with motivation and commitment for
professional advancement. [PO9]
Course delivery methods Assessment methods
1. Black Board Teaching 1. Internal Assessment
2. Power Point Presentation 2. Assignment
3. Working Models 3. Seminar
4. Videos 4. Mini-project

Scheme of Continuous Internal Evaluation (CIE):
Components Average of best two IA
tests out of three
Average of
assignments (Two) /
activity
Seminar/Mini
Project
Total
Marks
Maximum Marks: 50 30 10 10 50
Self Study topics shall be evaluated during CIE (Assignments and IA tests) and 10% weightage
shall be given in SEE question paper.
Scheme of Semester End Examination (SEE):
1. It will be conducted for 100 marks of 3 hours duration. It will be reduced to 50 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass:20
3. Question paper contains 08 questions each carrying 20 marks. Students have to answer FIVE full
questions. SEE question paper will have two compulsory questions (any 2 units) and choice will
be given in the remaining three units.

INDUSTRIAL DESIGN AND ERGONOMICS
Course Code MMD254 Credits 4
Course type PE CIE Marks 50 marks
Hours/week: L-T-P 4-0-0 SEE Marks 50 marks
Total Hours: 50 SEE Duration 3 Hours for
100 marks
Course learning objectives
1. To teach students an approach of industrial design in modern manufacturing systems.
2. To enable the students to understand the man-machine relationship and work station design in
industrial design and ergonomics.
3. To present the design of major controls in automobiles and machine tools.
4. To explain aesthetic concepts such as concept of unity, concept of order with variety, concept of
purpose style and environment.
5. To teach students aesthetic expressions such as style, components of style, house style,
observation style in capital goods.
Unit – I 10 Hours
Introduction: An approach to industrial design -elements of design structure for industrial design in
engineering application in modern manufacturing systems.
Ergonomics and Industrial Design: Introduction-general approach to the man-machine relationship-
workstation design-working position.
Self Learning Topics: Introduction to ergonomics
Unit – II 10 Hours
Control and Displays: Shapes and sizes of various controls and displays-multiple, displays and control
situations -design of major controls in automobiles, machine tools etc., Design of furniture -redesign of
instruments.
Ergonomics and Production: ergonomics and product design -ergonomics in automated systems-
expert systems for ergonomic design.
Unit – III 10 Hours
Anthropometric data and its applications in ergonomic, Design- limitations of anthropometric data- use
of computerized database. Case study.
Visual Effects of Line and Form: The mechanics of seeing- psychology of seeing general influences
of line and form. Colour: Colour and light-colour and objects-colour and the eye-colour consistency-
colour terms-reactions to colour and colour continuation-colour on engineering equipments.
Unit – IV 10 Hours
Aesthetic Concepts: Concept of unity- concept of order with variety -concept of purpose style and
environment-Aesthetic expressions. Style-components of style- house style, observation style in capital
goods, case study.
Self Learning Topics: Case study on aesthetic concepts.
Unit – V 10 Hours
Industrial Design in Practice: General design -specifying design equipments- rating the importance of
industrial design -industrial design in the design process.

Books
1. R. C. Bridger, Introduction to Ergonomics, McGraw Hill Publications.
2. Sanders and Mc Cormick, Human Factor Engineering, McGraw Hill Publications.
3. W. H. Mayall, Industrial Design for Engineers, London Hiffee books Ltd., 1988.
4. S. Brain, Applied Ergonomics Hand Book, Butterworth scientific, London, 1988.
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Explain the importance industrial design in modern manufacturing systems. [L2]
2. Demonstrate the man-machine relationship and work station design in industrial
design and ergonomics . [L3]
3. Design major controls in automobiles and machine tools. [L6]
4. Use aesthetic concepts such as concept of unity, concept of order with variety,
concept of purpose style and environment in industrial design. [L3]
5. Use the industrial design practices in the actual design process. [L3]
Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall conceptualise through lateral thinking and obtain feasible and
optimal solutions for engineering problems considering societal and environmental
requirements.
[PO3]
3. Graduates shall be able to adopt modern techniques, analytical tools and softwares
for complex engineering solutions. [PO5]
4. Graduates shall engage in lifelong learning with motivation and commitment for
professional advancement. [PO9]
Course delivery methods Assessment methods
1. Black Board Teaching 1. Internal Assessment
2. Power Point Presentation 2. Assignment
3. Working Models 3. Seminar
4. Videos 4. Mini-project
Scheme of Continuous Internal Evaluation (CIE):
Components Average of best two IA
tests out of three
Average of
assignments (Two) /
activity
Seminar/Mini
Project
Total
Marks
Maximum Marks: 50 30 10 10 50
Self Study topics shall be evaluated during CIE (Assignments and IA tests) and 10% weightage
shall be given in SEE question paper.

Scheme of Semester End Examination (SEE):
1. It will be conducted for 100 marks of 3 hours duration. It will be reduced to 50 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass:20
3. Question paper contains 08 questions each carrying 20 marks. Students have to answer FIVE full
questions. SEE question paper will have two compulsory questions (any 2 units) and choice will
be given in the remaining three units.
ROBOTICS
Course Code MMD255 Credits 4
Course type PE CIE Marks 50 marks
Hours/week: L-T-P 4-0-0 SEE Marks 50 marks
Total Hours: 50 SEE Duration 3 Hours for
100 marks
Course learning objectives
1. To introduce the basic concepts, parts of robots and types of robots.
2. To study different robot transformations and sensors.
3. To study the velocity and statics of different standard manipulators.
4. To make the student familiar with the various drive systems for robot, sensors and their
applications in robots.
5. To understand various control systems, actuators and their applications in robot.
Pre-requisites : Kinematics of Machines
Unit – I 10 Hours
Introduction: History of Robots, Types of Robots, Notation, Position and Orientation of a Rigid
Body, Properties of Rotation Matrices, Representation by X-Y-Z, Z-Y-Z Euler Angles,
Transformation between coordinate system, Homogeneous coordinates, Properties of , Types of
Joints: Rotary, Prismatic joint, Cylindrical joint, Spherical joint, Representation of links using Denvit-
Hartenberg parameters: Link parameters for intermediate, first and last links, Link transformation
matrices, Transformation matrices of 3R manipulator.
Unit – II 10 Hours
Kinematics and Dynamics of Manipulator: Degrees of freedom of a manipulator, Loop constraint
equations. Direct kinematics of 2R and 3R manipulator, PUMA560 manipulator, SCARA manipulator.
Direct kinematics of Stewart-Gough Platform. Inverse kinematics of 2R, Dynamics: Inertia of a link,
Recursive formulation of dynamics using Newton Euler equation, Equation of motion of 2R and 3R
manipulators using Lagrangian, Newton-Euler formulation.
Self Learning Topics:
1. Direct kinematics of Stewart-Gough Platform.
2. Singularities of serial and parallel manipulators- 3R mechanism.
Unit – III 10 Hours
Velocity of manipulator: Differential motions of a frame ( translation and rotation), Linear and
angular velocity of a rigid body, Linear and angular velocities of links in serial manipulators, 2R, 3R
manipulators, Jacobian of serial manipulator, Three DOF parallel manipulator Velocity ellipse of 2R
manipulator, Singularities of serial and parallel manipulators 2R, 3R, four bar mechanism, three DOF
parallel manipulator, Statics of serial manipulators, Static force and torque analysis of 3R manipulator.
Unit – IV 10 Hours
Trajectory Planning: Joint space schemes, cubic trajectory, Joint space schemes with via points,
Cubic trajectory with a via point, Third order polynomial trajectory planning, Linear segments with
parabolic blends, Cartesian space schemes, Cartesian straight line and circular motion planning,
Trajectory planning for orientation.
Actuators: Types, Characteristics of actuating system: weight, Power-to-weight ratio, Operating
pressure, Stiffness vs. compliance, Use of reduction gears, Comparison of hydraulic, Electric,
pneumatic, actuators, Hydraulic actuators, Proportional feedback control, Electric Motors: DC motors,

Reversible AC motors, Brushless DC motors, Stepper motors-structure and principle of operation,
Stepper motor speed-torque characteristics.
Self Learning Topics: Comparison of hydraulic, Electric, pneumatic actuators.
Unit – V 10 Hours
Control: Feedback control of a single link manipulator first order, second order system, PID control,
PID control of multi link manipulator, Non-linear control of manipulators-computed torque method,
Force control of manipulator, Cartesian control of manipulators, Force control of manipulators-force
control of single mass, Partitioning a task for force and position control-lever, peg in hole Hybrid force
and position controller.
Sensors: Sensor characteristics, Position sensors-potentiometers, Encoders, LVDT, Resolvers,
Displacement sensor, Velocity sensor-encoders, tachometers, Acceleration sensors, Force and Pressure
sensors -piezoelectric, force sensing resistor, Torque sensors, Touch and tactile sensor, Proximity
sensors-magnetic, Optical, Ultrasonic, Inductive, Capacitive, Eddy-current proximity sensors
Self Learning Topics: Inductive, Capacitive, Eddy-current proximity sensors.
Books
1. A. Ghosal, Fundamental Concepts and Analysis, Robotics, Oxford, 2006.
2. S. B. Niku, Introduction to Robotics Analysis, Systems, Applications, Pearson Education, 2008.
3. J. J. Craig, Introduction to Robotics: Mechanical and Control, Addison-Welsey, 2nd
edition
1989.
4. R. J. Schilling, Fundamentals of Robotics, Analysis and Control, PHI, 2006.
5. K. S. Fu, R. C. Gonzalez, C. and S. G. Lee, Robotics Control, Sensing, Vision and Intelligence,
McGraw Hill, 1987.
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Discuss the history, concept development and key components of robotics
technologies. [L2]
2. Explain basic mathematic manipulations of spatial coordinate representation and
transformation. [L2]
3. Solve basic robot forward and inverse kinematics problems. [L3]
4. Solve basic robotic dynamics, path planning and control problems. [L3]
5. Demonstrate principles of various Sensors, Actuators and their applications in
robots. [L3]
Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall possess ability for independent judgement based on critical analysis
and also for synthesis of information for extensive research in the area of
specialization [PO2]
2.
Graduates shall conceptualise through lateral thinking and obtain feasible and
optimal solutions for engineering problems considering societal and environmental
requirements.
[PO3]
3. Graduates shall be able to engage in collaborative multidisciplinary scientific
research for decision making through rational analysis. [PO6]
4. Graduates shall engage in lifelong learning with motivation and commitment for
professional advancement. [PO9]

Course delivery methods Assessment methods
1. Black Board Teaching 1. Internal Assessment
2. Power Point Presentation 2. Assignment
3. Working Models 3. Seminar
4. Videos 4. Mini-project
Scheme of Continuous Internal Evaluation (CIE):
Components Average of best two IA
tests out of three
Average of
assignments (Two) /
activity
Seminar/Mini
Project
Total
Marks
Maximum Marks: 50 30 10 10 50
Self Study topics shall be evaluated during CIE (Assignments and IA tests) and 10% weightage
shall be given in SEE question paper.
Scheme of Semester End Examination (SEE):
1. It will be conducted for 100 marks of 3 hours duration. It will be reduced to 50 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass:20
3. Question paper contains 08 questions each carrying 20 marks. Students have to answer FIVE full
questions. SEE question paper will have two compulsory questions (any 2 units) and choice will
be given in the remaining three units.

DESIGN AND DYNAMICS LABORATORY
Course Code MMD26 Credits 2
Course type PC CIE Marks 25 marks
Hours/week: L-T-P 0-0-3 SEE Marks 25 marks
Total Hours: 30 SEE Duration 3 Hours for 50 marks
Course learning objectives
1. To introduce the design and dynamics laboratory experiments such as strain gauge, journal
bearing and dynamic balancing.
2. To teach the students to write solvers for natural frequencies and mode shapes for different
continuous systems using MATLAB.
3. To teach the students to simulate Dynamic Vibration Absorber using MATLAB.
Pre-requisites : FEA Tools and Mechanical Vibrations
List of experiments
1. Photo-elastic experiments. 1) Stress concentration in a plate with hole. 2) Contact stress
problems.
2. Strain Gauge experiments on actual machine members.
3. Study of Journal Bearing pressure profile.
4. Checking of unbalance in a rigid rotor in dynamic balancing machine.
5. Natural Frequencies and Mode Shapes of fixed beam using MATLAB and FEA package.
6. Natural Frequencies and Mode Shapes of cantilever beam MATLAB and FEA package.
7. Natural Frequencies and Mode Shapes of simply supported beam using MATLAB and FEA
package.
8. Analysis of rotor bearing system using ANSYS.
9. Introduction to Lab View software package and experiments on data acquisition.
Books
1. J. S. Rao, Rotor dynamics, New Age, New Delhi, 3rd
Edition, 1996.
2. S. S. Rao, Mechanical Vibrations, Pearson Education, 4th Edition.
3. R. Pratap, Getting started with MATLAB, Oxford University Press, 2002.
4. A. Gilat, Matlab: An Introduction with Applications, Wiley India.
5. S. Graham Kelly, Mechanical Vibrations, Schaum’s Outlines, Tata McGraw Hill, 2007.
6. C. Sujatha, Vibrations and Acoustics – Measurements and signal analysis, Tata McGraw Hill,
2010.
7. P. Srinivasn , Mechanical vibration Analysis, Tata McGraw Hill.
Course Outcome (COs)
At the end of the course, the student will be able to Bloom’s
Level
1. Solve the vibration problems in actual practice using MATLAB. [L3]
2.
Write MATLAB solvers of different continuous systems for natural frequencies
and mode shapes. [L6]
3.
Demonstrate the experiments on different machines such as photo elastic and
balancing.
[L3]

Program Outcome of this course (POs) PO No.
1. Graduates shall acquire in-depth knowledge in machine design and update the same,
integrating existing and updated knowledge in global perspective. [PO1]
2.
Graduates shall conceptualise through lateral thinking and obtain feasible and
optimal solutions for engineering problems considering societal and environmental
requirements. [PO3]
3. Graduates shall be able to adopt modern techniques, analytical tools and softwares
for complex engineering solutions. [PO5]
4. Graduates shall engage in lifelong learning with motivation and commitment for
professional advancement. [PO9]
Assessment methods
1. Lab Internal Assessment
2. VIVA
Scheme of Continuous Internal Evaluation (CIE):
Components Conduct of the lab Journal submission Lab test Total
Marks
Maximum Marks: 25 10 10 5 25
Submission and certification of lab journal is compulsory to qualify for SEE.
Scheme of Semester End Examination (SEE):
1. It will be conducted for 50 marks of 3 hours duration. It will be reduced to 25 marks for the
calculation of SGPA and CGPA.
2. Minimum marks required in SEE to pass: 13
3.
Initial write up 2*10 = 20 marks
50 marks Conduct of experiments 2*10 = 20 marks
Viva- voce 10 marks

Bloom’s Taxonomy of Learning Objectives
Bloom’s Taxonomy in its various forms represents the process of learning. It was developed
in 1956 by Benjamin Bloom and modified during the 1990’s by a new group of cognitive
psychologists, led by Lorin Anderson (a former student of Bloom’s) to make it relevant to the
21st century. The revised taxonomy given below emphasizes what a learner “Can Do”.
Lower order thinking skills (LOTS)
L1 Remembering Retrieve relevant knowledge from memory.
L2 Understanding Construct meaning from instructional material, including oral, written, and
graphic communication.
L3 Applying Carry out or use a procedure in a given situation – using learned
knowledge.
Higher order thinking skills (HOTS)
L4 Analyzing
Break down knowledge into its components and determine the relationships
of the components to one another and then how they relate to an overall
structure or task.
L5 Evaluating Make judgments based on criteria and standards, using previously learned
knowledge.
L6 Creating Combining or reorganizing elements to form a coherent or functional whole
or into a new pattern, structure or idea.
Recommended

















