Evolutionary RoboticsThe Genotype-to-Phenotype Map
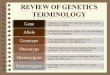
The genotype to phenotype map: the algorithm that transforms the genotype into the phenotype.
Direct mapping: Each element in the genotype code for one elementin the phenotype.
Indirect mapping: Each element in the genotype codes for, or influences, zero or more elements in the phenotype.
[0.8, 1.0, -0.9, … , -0.2]
0.8 -0.2

Evolutionary RoboticsThe Genotype-to-Phenotype Map
Indirect mapping: Each element in the genotype codes for, or influences, zero or more elements in the phenotype.
Q: How would youencode an indirect mappingfor this robot?
What are the differentsymmetries herethat may be important?
What if the robotis evaluated withdifferent numbers of segments?
…

Evolutionary RoboticsThe Genotype-to-Phenotype Map
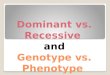
More biologically realistic.
Example: Genetic Regulatory Networks
Bongard, J. C. and R. Pfeifer (2001) Repeated Structure and Dissociation of Genotypic and Phenotypic Complexity in Artificial Ontogeny, in Proceedings of The Genetic and Evolutionary Computation Conference, GECCO-2001. pp. 829-836.

Bongard, J. C. and R. Pfeifer (2001) Repeated Structure and Dissociation of Genotypic and Phenotypic Complexity in Artificial Ontogeny, in Proceedings of The Genetic and Evolutionary Computation Conference, GECCO-2001. pp. 829-836.

The growing robot body and brain
The genome, a copy of which resides in each morphological unit
Transcription factors, produced by genescontained in the genome, diffuse through the robot's body, causing phenotypic change
Evolutionary Robotics

The genome, a copy of which resides in each morphological unit
Evolutionary Robotics
A B C
If gene A is on,It tries to turn gene C on: gene A “enhances” gene C.
If gene B is on,It tries to turn gene C off: gene A “represses” gene B.

Evolutionary Robotics

Evolved neural circuits

An evolved genetic regulatory network
Regulatory geneTargetted regulatory gene
Structural gene affecting morphogenesisStructural gene affecting neurogenesis

2
2
1
1
Evolutionary Robotics
Phenotypes(here, robots)can becomemore complexwithout thegenome growingtoo large:
developmentalencodings canbe more scalablethan directencodings.

Evolutionary Robotics
Genotype to phenotype encodings should be…
(they can encode phenotypes of increasing complexity)
(they can alter many aspects of the phenotypesuch as body plan, neural architectureand neural parameters)
(beneficial mutations are produced with a probability > 0 ),
but pleiotropy (one gene can affect several phenotypic characters)can negatively affect evolvability:

Evolutionary RoboticsGenotype to phenotype encodings should be…
evolvable (beneficial mutations are produced with a probability > 0 ),
but pleiotropy (one gene can affect several phenotypic characters)can negatively affect evolvability:
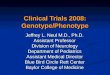
Modularmapping
Non-modularmapping
G1,G2,…G6 = genes 1 through 6P1,P2,P3,P4 = Phenotypic characters (eg. P1=CTRNN taus, P2=CTRNN weights)C1,C2 = Phenotypic complexes (C1=CTRNN for locomotion, C2=CTRNN for grasping)F1,F2 = functions (eg. F1=locomotion, F2=grasping)

Evolutionary Robotics
G1,G2,…G6 = genes 1 through 6P1,P2,P3,P4 = Phenotypic characters (eg. P1=CTRNN taus, P2=CTRNN weights)C1,C2 = Phenotypic complexes (C1=CTRNN for locomotion, C2=CTRNN for grasping)F1,F2 = functions (eg. F1=locomotion, F2=grasping)

Evolutionary Robotics
Research questions:
What kinds of evolutionary pressures will cause agenotype-to-phenotype mapping to become more (or less) modular?
How to create genotype-to-phenotype maps thatare compact, expressive and evolvable?
If an encoding is compact, expressive and evolvable for one fitness function,
will the same encoding be so for another fitness function?
Recommended