SLOVENSKÁ TECHNICKÁ UNIVERZITA V BRATISLAVE
STAVEBNÁ FAKULTA
Doc. Ing. Juraj Veselský, PhD.
Doc. RNDr. Jozefa Lukovičová, PhD.
FYZIKA
Mechanika, pružnosť a pevnosť, hydromechanika
2007

© Doc. Ing. Juraj Veselský, PhD., Doc. RNDr. Jozefa Lukovičová, PhD.
Lektori: Prof. RNDr. Jozef Zámečník, PhD.
Doc. Ing. Peter Dieška, CSc.
PREDHOVOR
Skriptá sú určené ako učebná pomôcka najmä pre študentov bakalárskeho stupňa štúdia
všetkých študijných programov vyučovaných na Stavebnej fakulte STU, ale iste budú osožné
aj pre iných záujemcov, ktorí sa chcú oboznámiť s problematikou v nich predkladanou.
Súčasná doba je charakterizovaná nástupom mnohých nových techník a technológií, ktoré
zasahujú prakticky do každého technického odvetvia. Domnievame sa, že každý absolvent
vysokoškolského technického štúdia by mal byť nielen ich užívateľom, ale mal by aspoň
v základe chápať ich podstatu. Tomuto cieľu je podriadená aj výučba fyziky na technických
univerzitách. Nie je jej úlohou, napr. z budúcich stavbárov bakalárov či inžinierov, vychovať
erudovaných fyzikov, ale jej úlohou je naučiť ich fyzikálne rozmýšľať. Nie je možné
predstaviť si úspešného technika bez toho, že by mu absentovalo fyzikálne myslenie. Aj tieto
predkladané skriptá majú pomôcť rozvíjať fyzikálne myslenie. Ich obsahom sú kapitoly
z mechaniky hmotného bodu, mechaniky sústavy hmotných bodov a telesa, pružnosti a
pevnosti a hydromechaniky.
Skriptá nadväzujú svojim obsahom na poznatky získané zo štúdia fyziky na gymnáziách.
Sú však prístupné i pre absolventov priemysloviek či odborných učilíšť s maturitou.
V podstate sa začína s výučbou od úplne základných fyzikálnych pojmov a poznatkov. Je však
nutné poznať základy diferenciálneho a integrálneho počtu. Jednotlivé kapitoly sú
koncipované tak, aby vytvárali jednotný, logicky previazaný celok. Teoretické poznatky v
jednotlivých kapitolách dopĺňajú riešené príklady, ktoré majú za úlohu ukázať aplikáciu teórie
na riešenie konkrétneho problému. Na záver každej kapitoly je zaradený súhrn
najdôležitejších poznatkov a vzťahov z príslušnej kapitoly. Dá sa povedať, že je to kapitola v
„skratke“. Sú to minimálne poznatky, ktoré by mal študent ovládať, aby úspešne vykonal
skúšku. Niektoré podkapitoly zasahujú aj hlbšie do preberanej problematiky, čo môže
uspokojiť vnímavejšieho študenta. Literatúra uvedená v závere skrípt predstavuje nielen
literatúru, z ktorej bolo čerpané pri zostavovaní skrípt, ale aj literatúru odporúčanú na hlbšie
štúdium.
Záverom nám dovoľte vysloviť presvedčenie, že tieto skriptá splnia svoj účel a nielenže
uľahčia prípravu na skúšku z predmetu Fyzika, ale vedomosti z nich získané pomôžu lepšie
chápať problematiku preberanú v odborných technických predmetoch.
Bratislava, október 2006 Juraj Veselský
Jozefa Lukovičová
OBSAH
PREDHOVOR 3
1 ÚVOD 5
1.1 Čo je fyzika? Čím sa zaoberá? 5
1.2 Stručne o fyzikálnom obraze sveta 6
1.3 Vzťah fyziky k iným vedám 8
1.4 Základy vektorovej algebry 10 1.4.1 Súčet a rozdiel vektorov 10 1.4.2 Rozklad vektora na zložky. Veľkosť vektora 11 1.4.3 Násobenie vektora skalárom 12 1.4.4 Skalárny súčin dvoch vektorov 13 1.4.5 Vektorový súčin dvoch vektorov 15 1.4.6 Zmiešaný súčin 16
1.4.7 Dvojnásobný vektorový súčin 17
Súhrn 55
2 POHYB HMOTNÉHO BODU 18
2.1 Úvod 18
2.2 Základné veličiny charakterizujúce pohyb 19
2.3 Klasifikácia pohybov 21
2.4 Priamočiary pohyb 23 2.4.1 Rovnomerný priamočiary pohyb 23 2.4.2 Nerovnomerný priamočiary pohyb 24
2.5 Príklad krivočiareho pohybu – pohyb po kružnici 28
2.5.1 Základné charakteristiky 28 2.5.2 Rýchlosť a zrýchlenie pri pohybe hmotného bodu po kružnici 30
2.6 Zložený pohyb 33
2.7 Newtonove pohybové zákony 37
2.8 Pohyb hmotného bodu v neinerciálnej súradnicovej sústave 40
2.9 Hybnosť, impulz sily, zákon zachovania hybnosti 41
2.10 Energia, práca, výkon, účinnosť 43
2.11 Kinetická a potenciálna energia 45
2.12 Gravitačné pole 46
2.12.1 Úvod 46 2.12.2 Newtonov gravitačný zákon 47 2.12.3 Intenzita gravitačného poľa 51
2.12.4 Gravitačná potenciálna energia. Gravitačný potenciál 53
2.12.5 Gravitačné pole Zeme 56
2.13 Zákon zachovania mechanickej energie 58
Súhrn 61
3 POHYB SÚSTAVY HMOTNÝCH BODOV
A DOKONA-LE TUHÉHO TELESA 68 3.1 Úvod 68
3.2 Kinematika sústavy hmotných bodov a telesa 68
3.3 Hmotný stred sústavy hmotných bodov (ťažisko) 70
3.4 I. pohybová rovnica sústavy hmotných bodov.
Veta o pohybe hmotného stredu 73
3.5 Moment sily. Moment hybnosti 75
3.6 II. pohybová rovnica sústavy hmotných bodov 77
3.7 Dokonale tuhé teleso. Skladanie síl v tuhom telese 79
3.8 Hmotný stred telesa. Pohybové rovnice tuhého telesa 81
3.9 Zákon zachovania hybnosti a zákon zachovania
momentu hybnosti telesa 83
3.10 Podmienky rovnováhy tuhého telesa 85
3.11 Pohyb tuhého telesa okolo pevnej osi 89
3.12 Moment zotrvačnosti. Steinerova veta 90
3.13 Kinetická energia rotujúceho telesa. Zotrvačník 97
3.14 Kyvadlový pohyb 103 3.14.1 Matematické kyvadlo 103 3.14.2 Fyzikálne kyvadlo 104 3.14.3 Torzné kyvadlo 108
Súhrn 109
4 PRUŽNOSŤ A PEVNOSŤ 118
4.1 Úvod 118
4.2 Charakteristika tuhých látok 118
4.2.1 Rozdelenie tuhých látok 118
4.2.2 Väzbové sily, väzbová energia 123
4.2.3 Hustota kryštálu a medziatómové vzdialenosti 126
4.2.4 Poruchy kryštálovej štruktúry 129
4.3 Mechanické vlastnosti inžinierskych materiálov 131
4.4 Deformácia v ťahu a tlaku. Hookov zákon 132
4.5 Homogénna deformácia stlačením 136
4.6 Deformácia v šmyku. Hookov zákon pre šmyk 139
4.7 Súvis medzi modulom pružnosti v ťahu E a modulom
pružnosti v šmyku G 141
4.8 Ohyb laty 144
4.9 Krútenie a jeho súvis so šmykom 147
4.10 Zovšeobecnený Hookov zákon 149
4.11 Potenciálna energia pružnej deformácie 151
Súhrn 152
5 MECHANIKA IDEÁLNYCH TEKUTÍN 158 5.1 Úvod 158
5.2 Hydrostatika 159
5.3 Hydrodynamika 168
5.4 Dynamické účinky prúdiacej kvapaliny 175
5.5 Reálna kvapalina – základné poznatky 176
5.6 Povrchové javy 180
Súhrn 185
LITERATÚRA 189
1 ÚVOD
1.1 Čo je fyzika? Čím sa zaoberá?
Pôvodne bola fyzika jedinou vedou o prírode (grécke slovo fysis značí príroda). Dnes je
vied o prírode mnoho, napr. chémia, biológia, geológia, astronómia atď. Čo teda skúma
fyzika? Na túto otázku odpovedať je veľmi ťažké. Ako uvidíme neskôr, odpovede na naj-
jednoduchšie otázky bývajú mnoho raz ťažké: Napr. Čo je to čas? Čo je to elektrický náboj?
...
Pokúsime sa však predsa odpovedať na túto otázku. V literatúre (H. Lindner) som našiel
túto definíciu: „Základná úloha fyziky spočíva v tom, aby hľadala a objavovala spojitosti
medzi procesmi a javmi v prírode a aby zjednotila všetky zákonitosti prírody do úplného
a vnútorne uzavretého systému.“
Rozviňme poslednú definíciu ďalej. Sú namieste prirodzené otázky: Ako, akým
spôsobom opisuje fyzika javy a ich súvislosti? Ako ich overuje? Aké prostriedky pritom
používa?
Fyzika využíva ako pracovný materiál len fakty potvrdené systematickým pozorovaním
a pokusmi. Najvyššou a jedinou inštanciou, kritériom „vedeckej pravdy“, ktorá vynáša výroky
o pravdivosti alebo chybnosti fyzikálnej teórie (skôr hypotézy) je experiment. Popri všetkej
dokonalosti a hĺbke fyzikálnych teórií je fyzika v svojej podstate experimentálnou vedou.
Teda, ako sme už uviedli, fyzikálne javy sa skúmajú dvoma spôsobmi: teoreticky
a experimentálne. V prvom prípade (teoretická fyzika) sa odvodzujú nové vzťahy a poskytujú
predpovede využívaním matematiky a používaním už známych fyzikálnych zákonov. V tomto
prípade sú hlavné pracovné prostriedky pero, papier a počítač. V druhom prípade
(experimentálna fyzika) sa získavajú nové poznatky a súvislosti medzi fyzikálnymi veličinami
a javmi pomocou fyzikálnych meraní. V tomto prípade sú pracovné prostriedky rôzne, od
najjednoduchších prístrojov až po veľmi zložité, veľmi drahé, stojace miliardy korún,
zariadenia a projekty. Obe tieto oblasti fyziky však nemožno chápať ako izolované –
vzájomne sa podmieňujú a ovplyvňujú. I keď vo fyzike sú rozhodujúce myšlienky –
predstavivosť z pozorovaných javov vytvárať zovšeobecnenia, obraz o tom ako daný jav
prebieha, čo ho spôsobuje, ako súvisí s iným javom, teda kvalitatívne predstavy – je nutné,
kvôli porovnaniu týchto predstáv s výsledkami experimentov, vyjadriť ich aj v kvantitatívnej
forme, vo forme matematických vzťahov. Kvantitatívny súhlas predpovedí teórie
s experimentom je najkrajšie overenie teórie. Je zrejmé, že kvantitatívne opísanie fyzikálneho
sveta nie je možné uskutočniť bez matematiky (preto sa možno fyzika zdá byť ťažká).
Matematika nielenže poskytuje spôsoby riešenia fyzikálnych rovníc, no vytvára aj metódy
opísania odpovedajúce charakteru fyzikálneho problému.
Ak niektorá oblasť fyziky dosiahne taký stupeň rozvoja, že všetky jej výsledky bude
možné odvodiť z niekoľkých presne experimentálne stanovených poznatkov, vtedy táto oblasť
prestane byť časťou rozvíjajúcej sa fyziky a prejde do oblasti aplikovanej matematiky alebo
techniky. To sa stalo napríklad s klasickou i relativistickou mechanikou (preto samostatný
predmet „Mechanika“), ale i s klasickým elektromagnetizmom (Fakulta elektrotechniky
a informatiky).
6
Je tu ešte jedna otázka: Ako vyučovať fyziku? Už sme spomínali, že na opis fyzikálnych
javov nepostačí iba kvalitatívny opis, je nutný aj kvantitatívny opis. V základe každej práce vo
fyzike (aj technike) stojí predovšetkým presné určenie veličín, ktorých charakter bol určený už
skôr. Základná vlastnosť ľubovoľnej fyzikálnej veličiny spočíva v tom, že ju možno vyjadriť
pomocou čísla (jej hodnoty) a jednotky a vykonávať s ňou určené matematické operácie. Nie
je teda možné vyučovať fyziku bez príslušných matematických znalostí. Na univerzite sa
predpokladá znalosť vyššej matematiky, aspoň na úrovni znalostí základov diferenciálneho
a integrálneho počtu. Okrem tejto požiadavky je tu didaktický problém: Čomu máme dať
prednosť? Máme začať výučbu so správnejšími, ale veľmi obtiažnymi (z hľadiska chápania
i matematiky) zákonmi ako je napr. teória relativity so svojim štvorrozmerným
priestoročasom, či zákony kvantovej mechaniky a pod. a z nich potom odvodzovať jednotlivé
jednoduchšie zákony a javy alebo máme najskôr vysvetľovať jednoduchšie, i keď približné
zákony, ktoré si nevyžadujú náročné predstavy? Druhý spôsob je ľahší – postupujeme od
známeho k neznámemu, od jednoduchšieho k zložitejšiemu. Podľa našej mienky je tento
spôsob vhodnejší a pri výučbe fyziky ako základu chápania technických disciplín vo väčšine
prípadov dostačujúci. Vždy však je vhodné zaujímať sa do akej miery je presné to, čo teraz
poznáme, ako to súvisí s ostatným a aký to môže mať dopad, keď bude naše poznanie
pokročilejšie. Pritom, všetkom si treba uvedomovať, že naše predstavy na svet nie sú uzavreté
a môžu sa v dôsledku nových poznatkov neustále vyvíjať.
1.2 Stručne o fyzikálnom obraze sveta
Známy americký fyzik R. Feynman, nositeľ Nobelovej ceny, vyslovil v svojom i u nás
známom kurze fyziky toto tvrdenie: „Ak by sa v nejakej kataklyzme zničili všetky vedecké
poznatky a ďalším generáciám by mala zostať jediná veta obsahujúca najbohatšiu informáciu
zostavenú z najmenšieho počtu slov, som presvedčený, že je to atómová hypotéza (alebo
atómový fakt), totiž, že všetky veci sa skladajú z atómov – malých častíc, ktoré sa neprestajne
pohybujú, ktoré sa vzájomne priťahujú, keď sú od seba neveľmi vzdialené, ale ktoré sa
odpudzujú, keď sú tesne pri sebe.“
Myslíme si, že v dnešnej dobe už väčšinu ľudí netreba presviedčať, že látka sa skladá
z častíc, medzi ktorými pôsobia sily (sila – vzájomné pôsobenie, interakcia objektov), ktoré
majú isté vlastnosti. Poznáme štyri základné (fundamentálne) interakcie pôsobiace v našom
svete. Sú to:
1) Gravitačná sila – pôsobiaca bez výnimky medzi všetkými časticami a majúca
charakter priťahovania.
2) Elektromagnetická sila. Elektrická sila pôsobí medzi elektricky nabitými časticami
a môže byť príťažlivá alebo odpudivá v závislosti od znamienok elektrických nábojov častíc.
S elektrickou silou je nerozlučne spätá magnetická sila, ktorá vzniká pri pohybe elektricky
nabitej častice. Obe tieto sily sú zjednotené pod spoločným názvom elektromagnetická sila.
3) Silná alebo jadrová sila – pôsobiaca medzi jadrovými časticami (protónmi
a neutrónmi). Nezávisí od elektrických nábojov častíc.
4) Slabá sila – uplatňujúca sa medzi časticami pri radioaktívnom rozpade. Tiež nezávisí
od elektrického náboja častíc.
Tieto štyri sily sa rozlišujú tiež podľa charakteru závislosti ich intenzity od vzdialenosti
medzi interagujúcimi časticami: Gravitačná a elektrická sila klesá so vzdialenosťou pomerne
pomaly – s druhou mocninou vzdialenosti. Naproti tomu silná sila klesá podstatne rýchlejšie,
jej polomer pôsobenia je len okolo m 10 15 (pri väčších vzdialenostiach táto interakcia sa
7
stáva veľmi rýchle zanedbateľnou). Slabá sila sa javí v tomto zmysle tiež krátkodosahová.
Predpokladá sa, že jej polomer pôsobenia je značne menší než pri silnej sile.
Opísané rozdiely v polomere pôsobenia a intenzity síl možno ilustrovať, ak budeme
sledovať závislosť silového pôsobenia medzi dvoma atómami vodíka od ich vzájomnej
vzdialenosti. Použijeme zjednodušenú predstavu, že atóm vodíka sa skladá z protónu, okolo
ktorého obieha vo vzdialenosti rádu m 10 10 elektrón. Za vzdialenosť medzi atómami
zoberieme vzdialenosť medzi stredmi protónov: Pri vzdialenostiach rádovo m 10 15 , t. j.
vzdialenostiach približne rovných maximálnemu polomeru pôsobenia jadrovej sily, jadrová
sila viac ako 100-násobne prevyšuje elektromagnetickú silu. Pri tejto vzdialenosti je
gravitačná a slabá sila zanedbateľná. Silná sila je rovná elektromagnetickej vo vzdialenosti
m, 10.6,5 15 pričom pri tomto výpočte bol zanedbaný vplyv elektrónov – uvažovalo sa len
pôsobenie protónov. Pri vzdialenostiach medzi protónmi rádovo m, 10 10 charakteristických
pre rozmery atómov a ich vzdialenosti v rámci molekúl, elektromagnetická sila sa stáva
dominujúcou.
Gravitačné sily hrajú rozhodujúcu úlohu pri veľkých rozmeroch (samozrejme pri
predpoklade elektrickej neutrálnosti objektov). Gravitácia drží pokope základné štruktúry
vesmíru galaxie, hviezdy a planéty. My sami sme nerozlučne spojení s našou planétou
gravitačnou silou, pretože i my i Zem sme elektricky neutrálni.
Zdá sa, že medzi vymenovanými štyrmi druhmi síl nachádzame ohromné rozdiely. Predsa
však fyzici hľadajú cesty ako zjednotiť všetky tieto sily na spoločnom základe. Takej teórii,
ktorá by zjednotila všetky základné interakcie sa hovorí finálna teória alebo teória všetkého.
Je snom fyzikov. Zdá sa, že ak takáto jednota interakcií existuje, potom sa uplatnila v prvých
okamihoch vzniku vesmíru.
Zaujímavá odpoveď je na otázku, prečo existujú práve tieto štyri druhy síl? Z pozície
antropocentrizmu je jasné, že je nám „potrebná“ gravitačná sila vytvárajúca galaxie, udržujúca
planéty na obežných dráhach okolo Slnka a nás na povrchu Zeme. Z hľadiska našej existencie
je taktiež potrebná elektrická sila. Táto udržuje elektróny v atómoch a spája atómy
v molekulách, z ktorých sa skladáme zas my. Silnú (jadrovú) silu potrebujeme tiež, pretože
viaže protóny a neutróny a tak vytvára rôzne atómové jadrá a teda rôzne chemické prvky.
Slabá sila je tiež veľmi potrebná, lebo podmieňuje proces „horenia“ hviezd, pri ktorom
vznikajú rôzne chemické prvky, ktoré, ako sme už spomínali, vytvárajú molekuly, tie zas
bunky a tie zas živé organizmy. Ak sa dva protóny nachádzajúce sa v hviezde zrazia, niekedy
sa jeden z protónov, vďaka slabej sile, zmení na neutrón, emitujúc pritom kladný pozitrón
(antičastica elektrónu) a neutríno. Neutrón a druhý protón sa zlúčia a vytvoria tak deuterón –
jadro ťažkého vodíka. Hneď za tým, jadrové reakcie (podmienené silnými
a elektromagnetickými interakciami) vytvoria -časticu – jadro hélia. Pritom sa uvoľňuje
obrovské množstvo energie – energia Slnka je v podstate určená týmto procesom. Teda
z hľadiska našej existencie je potrebné, aby vyššie vymenované štyri sily existovali. Bez nich
by sme tu neboli a nemohli by sme o nich vôbec hovoriť.
V predchádzajúcom sme hovorili o základných silách, ktoré udržujú hmotné častice, resp.
telesá v jestvujúcich štruktúrach. V nasledujúcom obrátime pozornosť na opis týchto štruktúr.
Začneme zo stručného opisu mikrosveta, kde sú dĺžkové rozmery značne menšie ako naše
vlastné. Tam sa stretávame so stavebnými časticami materiálnych objektov, s molekulami
a atómami. Vieme, že molekuly sa skladajú z atómov a vieme tiež, že atóm sa skladá z ešte
menších častíc. Na opis jeho zostavy použijeme nie veľmi presnú, ale zato názornú predstavu:
Atóm sa podobá drobučkej Slnečnej sústave s priemerom máličko viacej ako m 10 10 . Okolo
jadra, ktoré sa nachádza v strede „obiehajú“ elektróny. Elektrón je elementárna častica, nie je
8
zložená z iných častíc. Jadro sa skladá z protónov a neutrónov, ktoré, ako sme už spomínali,
držia pokope jadrové (silné) sily. Počet protónov v jadre určuje o aký chemický prvok ide.
V jadre je sústredená prakticky celá hmotnosť atómu (protón má približne 1800-krát väčšiu
hmotnosť ako elektrón; neutrón je ešte o máličko hmotnejší ako protón). Vyjadrenie
„elektróny obiehajú okolo jadra“ nie je správny z pohľadu kvantovej mechaniky, ktorá jediná
dokáže správne opísať mikroobjekty. Podľa kvantovej mechaniky elektrón neobieha okolo
jadra, ale jednoducho existuje v atóme. S prísne stanovenou pravdepodobnosťou ho môžeme
nájsť v niektorom bode atómu. V mnohých príkladoch sa však správanie elektrónov
vysvetľuje na základe planetárneho modelu.
Z experimentov vyplýva, že aj nukleóny majú svoju vnútornú štruktúru. Teda sú to
zložené častice. Elementárne častice, z ktorých nukleóny pozostávajú sa nazývajú kvarky.
Predpokladá sa, že kvark nemôže existovať samostatne.
Prenesme sa teraz z mikrosveta do makrosveta – do obrovských priestorov a vzdialeností
vesmíru. Pokúsime sa aspoň trochu priblížiť naše súčasné poznatky o vesmíre. Usporiadanie
hmoty vo vesmíre je dané, na rozdiel od mikrosveta, pôsobením gravitácie. Iné druhy
interakcií sú pri týchto obrovských hmotnostiach a vzdialenostiach zanedbateľné. Vesmírne
telesá sú prakticky elektricky neutrálne. Naše súčasné predstavy o vzniku a evolúcii vesmíru
sú založené na modeli veľkého výbuchu (Big Bangu). V súhlase s týmto modelom vznikol
vesmír pred 7 až 12 miliardami rokov (tento údaj sa na základe nových pozorovaní neustále
upresňuje). V okamihu Big Bangu bolo všetko skomprimované do veľmi malého priestoru,
kde bola extrémne vysoká hustota a teplota. Od tohto okamihu je vesmír v stave neustáleho
rozpínania sa. Jeho priemerná hustota a teplota neustále klesá. A v akom stave sa nachádza
vesmír dnes? Dnešný vesmír pozostáva z hviezd, ktoré sú zlúčené do galaxií. Galaxie
vytvárajú kopy galaxií. Hviezdy v galaxiách môžu mať planéty, podobne ako naše Slnko. Vo
vesmíre existujú kvasary, objekty vyžarujúce ohromné množstvo energie, existujú v ňom
čierne diery, množstvo plynu, prachu a pod. Mnoho vecí nám ešte nie je známych a mnohé sú
ešte nejasné. Vieme však, že vesmír sa rozpína. Bude toto rozširovanie prebiehať večne?
zastaví sa? alebo sa vesmír začne zmršťovať? Možné sú všetky tri scenáre. To, ktorý z nich
nastane závisí od celkovej hmotnosti vesmíru. Ak táto hmotnosť prevyšuje istú, tzv. kritickú
hmotnosť, potom gravitácia „zvíťazí“ nad rozpínaním a vesmír sa začne zmršťovať,
skolabuje, nastane veľké stlačenie (anglicky Big Crunch) – hovoríme o uzavretom modeli
vesmíru. Keď je hmotnosti málo, vesmír sa bude rozpínať večne (otvorený model vesmíru).
Keď je hmotnosť kritická rozpínanie bude najpomalšie a hovoríme o plochom modeli.
Existuje aj hypotéza oscilujúceho vesmíru, v ktorom by sa striedal Big Bang s Big Crunchom.
1.3 Vzťah fyziky k iným vedám
Až do začiatku 19. storočia sa používal pre náuku o prírode názov „prírodná filozofia“.
Prvé poznatky o prírode získavali ľudia prostredníctvom svojich zmyslov. Je známe, že
prostredníctvom zraku získavame najviac informácií o našom svete. S procesom videnia je
bezprostredne spojený pojem svetla a veda, ktorá sa začala rozvíjať na základe tohto procesu
sa nazýva optika. Zvuk je spojený s ďalším našim zmyslom, sluchom. Veda, ktorá sa zaoberá
skúmaním zvuku sa nazýva akustika. Teplo a teplota sú spojené s ďalšími našimi pocitmi,
s pocitmi chladu, resp. tepla. Časť fyziky, ktorá sa zaoberá skúmaním problémov spojených
s uvedenými veličinami sa nazýva termika. S bezprostredným ľudským pozorovaním sú tiež
tesne späté problémy pohybu telies. Štúdiu pohybu telies, ale aj ich správaním sa za pôsobenia
síl venuje mechanika. Voľný pád telies a pohyby planét sú spôsobené gravitačnými

9
interakciami a gravitácia sa tradične zahŕňa do mechaniky. Z hľadiska stavebníctva je veľmi
dôležitou súčasťou mechaniky statika – časť mechaniky zaoberajúca sa podmienkami
rovnováhy telies. Elektromagnetizmus, ktorý už zdanlivo nesúvisí priamo s našim zmyslovým
vnímaním sa začal rozvíjať ako súčasť fyziky až v 19. storočí. Od dávno známych javov,
akými boli vznik elektriny trením a vzájomné pôsobenie prírodných magnetov, sa prešlo
k systematickému skúmaniu týchto javov a ich vzájomných súvislostí. Možno bez
zveličovania povedať, že práve pochopenie elektrických a magnetických javov podmienilo
ďalší prudký rozvoj fyziky a techniky. Vymenované časti fyziky zvykneme nazývať klasickou
fyzikou. Táto je základom pre značnú časť technických vied. Na prelome 19. a 20. storočia
bola zavedená kvantová hypotéza, na ktorej základe sa vybudovali kvantové teórie rôznych
fyzikálnych javov. Začiatkom 20. storočia bola Einsteinom vytvorená teória relativity. Fyzika
rozvíjajúca sa na základe uvedených teórií sa zvykne nazývať moderná fyzika.
Ako sme už spomenuli, fyzika je veda, ktorej náplňou je študovať zložky látky a ich
vzájomné interakcie. Na tomto základe sa potom snaží vysvetliť objemové vlastnosti telies,
ale aj iné prírodné zákonitosti, ktoré pozorujeme. Z uvedeného pohľadu sa fyzika javí ako
najzákladnejšia prírodná veda, lebo napr. chémia, ktorá sa zaoberá vytváraním a štruktúrou
molekúl, ich premenou na iné sa pri tom nezaobíde bez aplikovania fundamentálnejších
fyzikálnych zákonov. Podobne biológia, ktorá študuje zložité živé systémy sa nezaobíde bez
poznania a aplikácie fyzikálnych a chemických princípov. Aplikácia fyzikálnych
a chemických princípov na riešenie praktických problémov nášho života dala podnet na vznik
a rozvoj rôznych inžinierskych odvetví. Modernú inžiniersku prax a výskum na slušnej úrovni
nie je možné uskutočňovať bez porozumenia základných ideí fyziky.
Ale fyzika nie je dôležitá len z hľadiska toho, že je teoretickým základom pre ostatné
prírodné a inžinierske vedy, ale fyzika poskytuje aj metódy a techniky, ktoré sa používajú vo
väčšine oblastí základného i aplikovaného výskumu. Fyzika ako prvá pocítila, keďže je
v svojej podstate experimentálnou vedou, potrebu presne definovať a merať veličiny, ktoré
skúma. Na tomto základe bola zavedená v našich krajinách sústava jednotiek SI (Système
Internationale d´Unités). Fyzika taktiež poskytuje základné princípy a postupy pre meranie
rôznych veličín. Realizáciou jednotiek veličín vyskytujúcich sa vo fyzike a technike sa
zaoberajú metrologické ústavy. Mnohé z meracích techník pôvodne vyvinutých na poli fyziky
sa dnes bežne používajú v technickej praxi. Napr. geodeti a geológovia používajú
gravimetrické, akustické, nukleárne, optické, rádiotechnické a mechanické metódy. To isté
možno povedať aj o iných vedných odvetviach. Na záver tohto krátkeho a neúplného prehľadu
súvisu fyziky a iných vied treba spomenúť jeden veľmi dôležitý fyzikálny objav, bez ktorého
by sme si súčasnú techniku, ale aj bežný každodenný život, už ani nevedeli predstaviť. Je to
objav polovodičovej diódy a tranzistora. Dnes sa s týmito a podobnými polovodičovým
súčiastkami stretávame doslova na každom kroku a častokrát bez toho, že by sme si to
uvedomovali. Dnešný elektrotechnický, či elektronický priemysel je temer výhradne založený
na týchto súčiastkach. Moderné informačné technológie by bez nich neboli možné.
Technológie vyvinuté na pôde aplikovanej fyziky podmieňujú rozvoj výpočtovej techniky, čo
spätne umožňuje a podnecuje vznik nových objavov. Mnohé prístroje používané nielen
v technike, ale aj iných oblastiach ľudskej činnosti sú práve založené na použití klasických
meracích techník umocnených použitím výpočtovej techniky. Napr. nemocnice sú vybavené
najsofistikovanejšími fyzikálnymi technikami: röntgenmi, CT-čkami – počítačovými
tomografmi, MRI – zobrazovaním pomocou magnetickej rezonancie, ultrazvukovými
prístrojmi (sonografmi), lasermi, rádioizotopovými zariadeniami atď. Zväčša sa týmito
prístrojmi hrdia lekári a akosi sa zabúda na ich tvorcov – fyzikov a technikov. V tomto duchu
10
by sme mohli načrieť do každého technického, či iného odvetvia ľudskej činnosti a v každom
by sme sa zaručene stretli s príspevkom fyziky.
1.4 Základy vektorovej algebry
Niektoré fyzikálne veličiny sú úplne určené ich hodnotou (veľkosťou) v príslušných
jednotkách. Tieto veličiny nazývame skalármi. Takéto veličiny sú napr. čas, hmotnosť,
elektrický náboj, energia. Iné veličiny potrebujú na úplné určenie dva údaje – veľkosť a smer.
Takéto veličiny nazývame vektormi. Príkladom sú napr. rýchlosť, zrýchlenie, sila. Vektory
znázorňujeme pomocou orientovaných úsečiek, ktoré majú smer vektora a ktorých dĺžka
zodpovedá hodnote príslušnej vektorovej veličiny. Značky vektorových veličín v tlačenom
texte píšeme tučným písmom v kurzíve (a) a tenkým písmom v kurzíve (a) označujeme
veľkosť vektora. V písanom texte píšeme nad značku príslušnej vektorovej veličiny šipku ( a
).
Bez šipky nad značkou (a) znova ide len o veľkosť príslušnej vektorovej veličiny.
Dva vektory sú rovnaké, keď majú rovnaké veľkosti aj smery, obr. 1.1. Jednotkový vektor
je vektor, ktorého veľkosť je jedna. Vektor a, ktorý má smer jednotkového vektora 0a
(jednotkové vektory zvykneme označovať príslušnou značkou vektora s horným indexom 0
alebo veľmi často používame malé grécke písmená) možno vyjadriť v tvare
0aa a (1.1)
Opačný vektor k vektoru a je vektor, ktorý má rovnakú veľkosť ako a ale opačný smer
( a ), obr. 1.2.
Vo fyzike (ale nielen v nej) sa stretneme so skalárnymi aj vektorovými veličinami, ktoré
vystupujú v rôznych matematických vzťahoch. Ako sa narába so skalármi sme sa naučili
v bežnej algebre. Aby sme nemali problémy s narábaním s vektormi, uvedieme základné
pravidlá počítania s vektormi – uvedieme základné pravidlá vektorovej algebry.
1.4.1 Súčet a rozdiel vektorov
Kvôli ľahšiemu pochopeniu pravidla pre sčítanie vektorov uvažujme posunutie nejakej
častice z bodu A do bodu B (obr. 1.3) a nasledovne z bodu B do bodu C. Časticu však možno
posunúť z bodu A do bodu C aj priamo. Tieto posunutia môžu byť reprezentované aj vektormi
a, b a c. Teda platí
cba (1.2)
Teda graficky robíme súčet vektorov tak, že ku koncovému bodu prvého vektora
priložíme začiatočný bod druhého vektora a výsledný vektor má začiatok v začiatočnom bode
Obr. 1.1. Dva vektory sú
rovnaké, keď majú rovnaké
veľkosti aj smery.
Obr. 1.2. Vektor a je opačný vektor k vektoru a.
a
-a
a a

11
prvého vektora a koncový bod v koncovom bode druhého vektora. Tento postup možno
použiť aj pri sčítavaní viacerých vektorov – pozri obr. 1.4. Iný postup grafického sčítavania
dvoch vektorov je takýto: Posunieme obidva vektory do spoločného začiatku (obr. 1.5) a
koncovým bodom prvého vektora (a) vedieme rovnobežku s druhým vektorom (b)
a koncovým bodom druhého vektora rovnobežku s prvým vektorom. Výsledný vektor (c) má
začiatok v spoločnom začiatku obidvoch sčítavaných vektorov a koniec v protiľahlom vrchole
rovnobežníka tvoreného sčítavanými vektormi a rovnobežkami.
Pre súčet vektorov platí zákon komutatívny, t.j. abba , obr. 1.6.
Rozdiel dvoch vektorov dba možno napísať aj takto: dba . Týmto máme
daný návod na urobenie rozdielu dvoch vektorov: urobíme súčet prvého vektora (a) a vektora
opačného k druhému vektoru, teda vektora –b, pozri obr. 1.7.
Veľkosť výsledných vektorov pri súčte a rozdiele vypočítame podľa pravidiel
používaných pri riešení trojuholníkov – použitím Pytagorovej, kosínusovej alebo sínusovej
vety.
1.4.2 Rozklad vektora na zložky. Veľkosť vektora
Ľubovoľný vektor a možno považovať za súčet dvoch vektorov. Tieto vektory nazývame
zložkami vektora a. Inými slovami, ľubovoľný vektor možno rozložiť na zložky. Na obr. 1.8 je
naznačený postup – vektor a možno rozložiť na dve zložky aaa 21 ; ďalej zložku 1a
Obr. 1.5. Iný postup pri gra-
fickom sčítavaní vektorov. Vý-
sledný vektor je uhlopriečka
rovnobežníka určeného sčítava-
nými vektormi. Všetky tri vek-
tory majú spoločný začiatok.
Obr. 1.3. Časticu možno posu-
núť z bodu A do bodu C tak, že
ju posunieme z bodu A do bodu
B a potom z bodu B do bodu C.
Časticu však možno posunúť
z bodu A do bodu C aj priamo.
Obr. 1.4. Postup pri sčítavaní
viacerých vektorov. Sčítavané
vektory sa „naháňajú“. Výsled-
ný vektor má začiatok v začiat-
ku prvého vektora a koniec
v koncovom bode posledného.
Obr. 1.7. Rozdiel dvoch vek-
torov dba urobíme tak, že
k prvému vektoru a pripočítame
opačný druhý vektor .b
Obr. 1.8. Vektor a možno
rozložiť na ľubovoľný
počet zložiek. Napríklad:
21211 aaaa .
Obr. 1.6. Pre súčet vektorov platí
zákon komutatívny abba .
a
b
c
d
a
b
c
a
b
-b
d
aaa
a
a
112
12
1
a
b
c
A
B
C
a
a
b
b
cc
a) b)

12
možno rozložiť na zložky 11211 aaa . Teda vektor 21211 aaaa . V rozklade by sme
mohli pokračovať do nekonečna.
Najčastejšie rozkladáme vektory na pravouhlé zložky, do
smerov súradnicových osí x, y, z. Najprv rozložíme vektor len do
smerov osí x a y, obr. 1.9. Vektor a, ktorý zviera s kladným
smerom osi x uhol možno vyjadriť ako yx aaa . Veľkosti
zložiek sú
cos aax
sin aay (1.3)
V kladnom smere osí x a y zavádzame vo fyzike jednotkové
vektory i a j. Potom ia xx a , ja yy a a vektor
jia yx aa (1.4)
Zložky jednotkového vektora 0a , ktorý určuje smer vektora a sú cos i a sin j , teda
sin cos 0 jia
a a
(1.5)
Veľkosť a vektora a, ako vyplýva zo vzťahu (1.3), je
22
yx aaa (1.6)
Veľkosť vektora vyjadreného v pravouhlých zložkách
vypočítame teda pomocou Pytagorovej vety. Keď máme
tri zložky, pribudne ešte jeden člen
222
zyx aaaa (1.7)
Ako uvidíme v 2. kapitole, polohu hmotného bodu
udávame pomocou polohového vektora r. V zložkách ho
možno vyjadriť takto
kjir zyx (1.8)
kde x, y a z sú súradnice hmotného bodu. Postup pri
rozklade polohového vektora na pravouhlé zložky je znázornený na obr. 1.10.
1.4.3 Násobenie vektora skalárom
Keď vynásobíme vektor a skalárom s dostaneme vektor
ab s (1.9)
Obr. 1.9. Rozklad vektora na
pravouhlé zložky.
Obr. 1.10. Rozklad polohového
vektora na pravouhlé zložky.
0
x
y
a
a
i
j0
r
x
xy
y
z
z
0i
j
k
r
r
r
x
y
z

13
ktorý má súhlasný alebo nesúhlasný smer so smerom vektora a, podľa toho, či s je kladné
alebo záporné a s-krát väčšiu absolútnu hodnotu, obr. 1.11.
1.4.4 Skalárny súčin dvoch vektorov
Skalárny súčin dvoch vektorov a a b je definovaný vzťahom
cos abba (1.10)
kde a, b sú veľkosti vektorov a a b a je uhol medzi nimi ( 180 ), obr. 1.12.
Poznámka: Nezabudnite písať bodku medzi vektormi ako znak skalárneho súčinu!
Ako vidno z definície, výsledkom skalárneho súčinu dvoch vektorov je skalár, čo sa
odzrkadľuje aj v názve tohto súčinu.
Skalárny súčin je komutatívny
abba (1.11)
Pre skalárny súčin platí zákon distributívny
cabacba (1.12)
a zákon asociatívny
bababa sss (1.13)
Skalárny súčin ,2aaa lebo uhol medzi vektormi je rovný nule. Ak sú vektory kolmé
( 2π ), skalárny súčin je rovný nule. Podmienkou kolmosti dvoch vektorov je teda, aby ich
skalárny súčin bol rovný nule, .0ba
Skalárny súčin dvoch vektorov a a b vyjadrených pomocou pravouhlých zložiek je
kjikjiba zyxzyx bbbaaa
kijiii zxyxxx bababa
kjjjij zyyyxy bababa
kkjkik zzyzxz bababa (1.14)
Obr. 1.12. Hodnota skalárneho
súčinu je rovná súčinu veľkosti
priemetu jedného vektora do
smeru druhého a veľkosti dru-
hého vektora.
Obr. 1.11. Násobenie vektora
skalárom: a) skalár s je kladný
a väčší ako jedna, b) skalár s je
záporný a jeho absolútna hod-
nota je menšia ako jedna.
asa
sa
a) b)
b
a

14
Skalárne súčiny jednotkových vektorov sú
10 cos 11 .kkjjii
02
π cos 1.1 jkikkjijkiji (1.15)
Potom, keď použijeme vzťahy (1.15) skalárny súčin je
zzyyxx bababa ba (1.16)
Urobme skalárny súčin aa
2222zyx aaaa aa
Z tohto vzťahu veľkosť a vektora a je
222
zyx aaaa
čo je vzťah totožný so vzťahom (1.7).
Geometrický význam skalárneho súčinu. Ako vyplýva
z definície skalárneho súčinu (1.10) a pozri tiež obr. 1.12,
hodnota skalárneho súčinu je rovná súčinu veľkosti
priemetu jedného vektora do smeru druhého a veľkosti
druhého vektora. Pomocou skalárneho súčinu vektora a
jednotkového vektora v zadanom smere vypočítame
veľkosť zložky vektora spadajúcu do zadaného smeru –
napr.: xaa cos a.i je veľkosť zložky vektora a
v smere osi x.
Veľmi často určujeme smer vektora pomocou
smerových kosínusov. Označme uhly, ktoré zviera vektor a
s vektormi i, j, k ako , , (obr. 1.13). Kosínusy týchto
uhlov ( cos , cos , cos ) nazývame smerové kosínusy.
Sú zviazané nasledujúcim vzťahom
1coscoscos 222 (1.17)
Tento vzťah možno odvodiť takto: Vydelíme najprv vektor a, vyjadrený v zložkovom
tvare, jeho veľkosťou a
cos cos cos 0kjikjia
a
a
a
a
a
a
a
a
zyx
Potom vynásobíme skalárne jednotkový vektor 0a sebou samým
Obr. 1.13. Smer vektora udávame
často pomocou smerových kosínu-
sov: cos , cos , cos .
a
x
y
z
0i
j
k

15
cos cos cos cos cos cos 00kjikjiaa
a teda platí
222 coscoscos1
1.4.5 Vektorový súčin dvoch vektorov
Vektorový súčin dvoch vektorov a a b je definovaný
vzťahom
ρba sin ab (1.18)
kde a a b sú veľkosti vektorov a uhol je uhol medzi
vektormi ( 180 ). Výsledkom vektorového súčinu, ako
napovedá aj jeho názov, je vektor, ktorého veľkosť je určená
vzťahom v zátvorke a ktorý je kolmý na rovinu v ktorej ležia
vektory a a b. Smer výsledného vektora je určený
jednotkovým vektorom ρ , ktorý určíme pomocou pravidla
pravej ruky: Prsty pravej ruky stotožníme s prvým vektorom v
súčine a potom ich stotožňujeme po kratšej „dráhe“ (v smere
menšieho uhla) s druhým vektorom, Palec ukazuje smer
vektora ρ , obr. 1.14.
Z definície vektorového súčinu vyplýva, že
abba , čo značí, že pre vektorový súčin neplatí
komutatívny zákon. Keď je vektorový súčin vektorov rovný nule, 0ba , značí to, že
vektory sú paralelné.
Pre vektorový súčin platí distributívny zákon
bcacbac (1.19)
a asociatívny zákon
bababa sss (1.20)
Vektorový súčin v zložkovom tvare. Majme dva vektory vyjadrené v zložkovom tvare:
kjia zyx aaa a kjib zyx bbb . Potom
kjikjiba zyxzyx bbbaaa
kijiii zxyxxx bababa
kjjjij zyyyxy bababa
kkjkik bababa zyzxz (1.21)
Vektorové súčiny jednotkových vektorov sú
Obr. 1.14. Smer vektora ba
je určený jednotkovým vekto-
rom ρ , ktorý určíme pomocou
pravidla pravej ruky.
a
b
a bx
b ax

16
0 , ,
0, ,
, ,0
kkikjjki
ijkjj kji
jikkijii
-
-
Po dosadení vektorových súčinov jednotkových vektorov do vzťahu (1.21) dostaneme
kjiba xyyxzxxzyzzy babababababa (1.22)
Vektorový súčin možno pohodlne vypočítať ako determinant matice, v ktorej v 1. riadku
sú jednotkové vektory, v 2. riadku súradnice prvého vektora a v 3. riadku súradnice druhého
vektora
kji
kji
ba yx
yx
xz
xz
zy
zy
zyx
zyx bb
aa
bb
aa
bb
aa
bbb
aaa
kji xyyxzxxzyzzy babababababa
Geometrický význam vektorového súčinu. Uvažujme rovnobežník určený vektormi a a b
(obr. 1.15). Jeho plocha je
sin ba v ab.aS (1.23)
Teda, absolútna hodnota vektorového súčinu dvoch vektorov je rovná ploche S
rovnobežníka určeného týmito dvoma vektormi. Vektorovým súčinom je ploche S
rovnobežníka priradený aj vektor S, ktorý je, ako vidno z obr. 1.15, kolmý na plochu.
1.4.6 Zmiešaný súčin
Pod zmiešaným súčinom vektorov rozumieme skalárny súčin vektora, napr. c,
s vektorovým súčinom vektorov a a b
Obr. 1.15. Geometrickým význa-
mom vektorového súčinu dvoch
vektorov je plocha rovnobežníka
určeného týmito dvoma vektormi.
Obr. 1.16. Absolútna hodnota
zmiešaného súčinu je rovná
objemu kvádra určeného vek-
tormi a, b a c.
b
S = a bx
a
vb
a
v
S = a bx
c
17
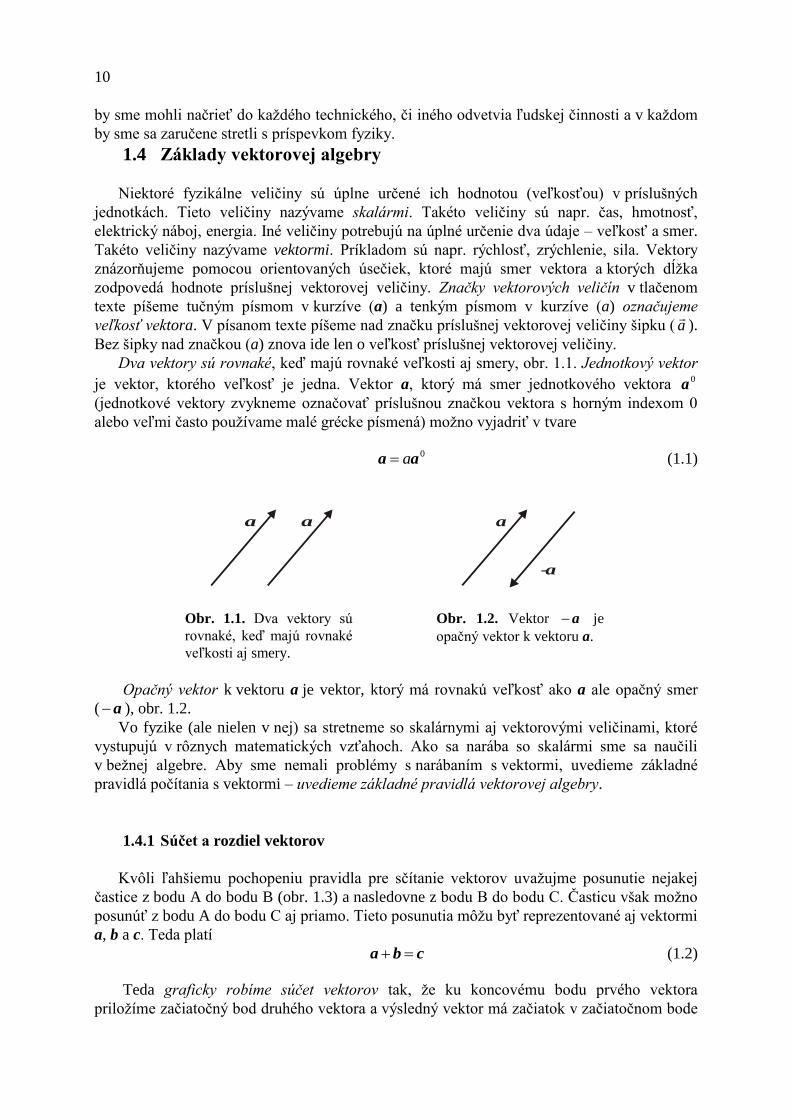
V bac (1.24)
Výsledkom, ako je zrejmé, je skalár. Absolútna hodnota zmiešaného súčinu je rovná
objemu rovnobežnostena (kvádra) určeného vektormi a, b a c (obr. 1.16). Objem šikmého
hranola totiž počítame takto
cos sin cba.SV v
kde S je plocha základne hranola a v jeho výška.
Rovnaký vzťah dostaneme, keď použijeme zmiešaný súčin
cos sin abcV
Uvedieme tu ešte pravidlo cyklického posúvania vektorov v súčine, ktoré sa často
používa pri úprave vektorových vzťahov
cbaacbbac (1.25)
1.4.7 Dvojnásobný vektorový súčin
Stretneme sa aj s tzv. dvojnásobným vektorovým súčinom. Uvedieme vzťah pre jeho
výpočet
baccabcba (1.26)
Dvojnásobný vektorový súčin troch vektorov je teda rovný rozdielu prostredného vektora
násobeného skalárnym súčinom obidvoch zvyšných vektorov a druhého vektora zo zátvorky
násobeného skalárnym súčinom obidvoch zvyšných vektorov.
Zátvorka vyjadruje, ktoré násobenie vektorov treba vykonať najprv. Výsledkom tohto
súčinu je vektor, ktorý leží v rovine vektorov b a c.
2 POHYB HMOTNÉHO BODU
2.1 Úvod
Vo fyzike budeme rozlišovať dve fyzikálne formy existencie hmoty: látku a pole. Látkou
budeme nazývať hmotu, ktorá prejavuje tzv. korpuskulárne (čiastočkové) vlastnosti. Poľom
označujeme priestor silových pôsobení medzi látkami. V tomto zmysle potom hovoríme
o materiálnych látkových objektoch (atómy, molekuly, telesá, planéty, ...) a o materiálnych
poľných objektoch (gravitačné pole, elektromagnetické pole, ...). Ukazuje sa však, že látka
vykazuje vlastnosti typické pre pole – napríklad difrakcia elektrónov na štrbine a pole má
vlastnosti korpuskúl – fotóny, gravitóny. Teda toto delenie je viac-menej formálne.
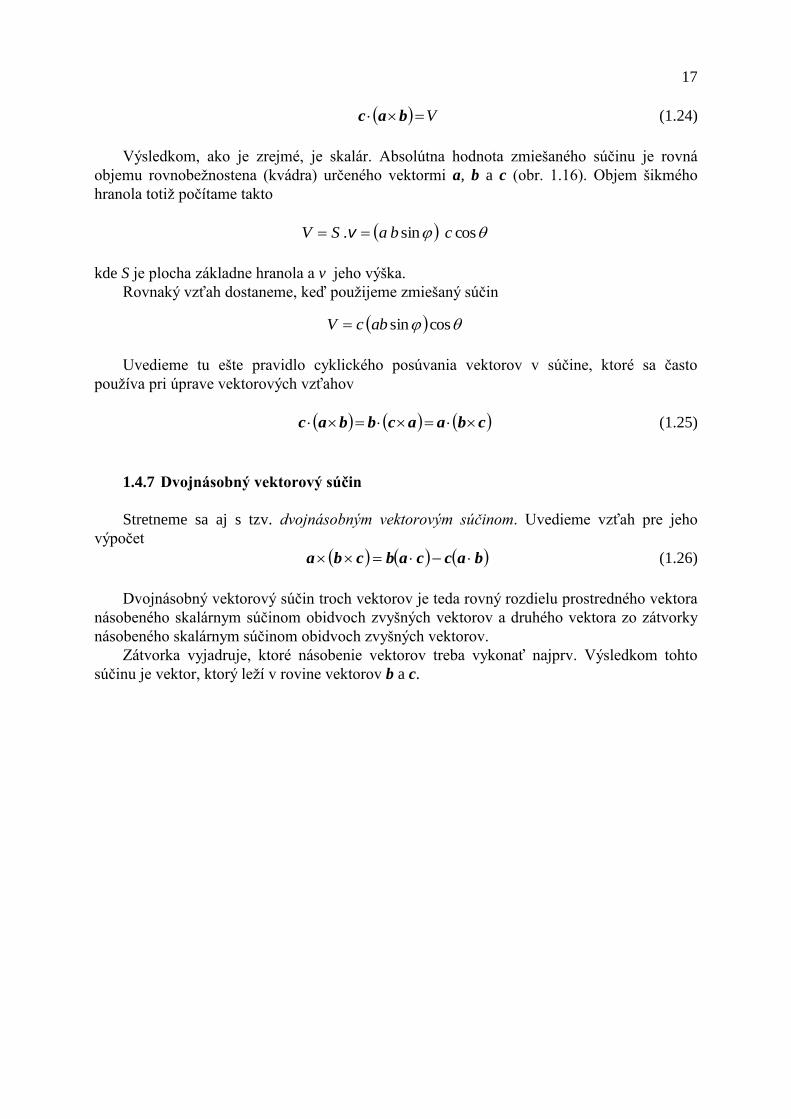
V úvodnej časti nášho kurzu sa budeme zaoberať pohybom látkových objektov – telies.
Pod pohybom budeme rozumieť zmenu vzájomnej konfigurácie telies. Teda pohyb jedného
telesa môžeme opísať polohou a zmenou tejto polohy
(ako funkcií času) vzhľadom na druhé teleso. Na tento
účel si zavádzame súradnicovú sústavu viazanú na
niektoré teleso. Najčastejšie používame pravouhlú
(kartézsku) pravotočivú súradnicovú sústavu, v ktorej
je poloha bodu určená súradnicami x, y, z (obr. 2.1).1
Opísať pohyb telesa znamená nájsť také
vyjadrenie tohto pohybu, ktoré umožňuje odvodiť
podľa potreby pohyb ktoréhokoľvek bodu telesa. Túto
úlohu, obecne veľmi obtiažnu u skutočného
deformovateľného telesa, je možné si uľahčiť
predpokladom mysleného tuhého telesa, ktoré má
nemenný tvar. Jeho všetky body majú stále vzájomné
polohy, a preto i vzájomne viazané pohyby.
Pohyb tuhého telesa je možno rozložiť na dva
základné druhy pohybov: posuvný (translačný) a
otáčavý (rotačný).
Posuvný pohyb sa vyznačuje tým, že každá priamka a rovina v tuhom telese zostáva pri
tomto pohybe rovnobežná so svojou začiatočnou polohou. Všetky body tuhého telesa sa
pohybujú pri posuvnom pohybe po rovnakých trajektóriách a majú súčasne rovnaké rýchlosti
a zrýchlenia, obr. 2.2a.
Otáčavý pohyb je charakterizovaný tým, že pri ňom všetky body tuhého telesa konajú
pohyb po kružniciach okolo spoločnej osi rotácie. Teda sprievodiče všetkých bodov telesa
opíšu za určitý čas rovnaké stredové uhly a všetky body telesa majú súčasne rovnaké uhlové
rýchlosti a uhlové zrýchlenia. Otáčavý pohyb tuhého telesa môžeme teda určiť pohybom
ktoréhokoľvek jeho bodu po kružnici a polohou osi rotácie vo zvolenej sústave súradníc,
obr. 2.2b.
1Tu sa treba zmieniť o vzájomnom súvise pokoja a pohybu. O tom, či dané teleso je v pokoji alebo
v pohybe rozhoduje aj to, vzhľadom na ktorú súradnicovú sústavu pohybový stav telesa určujeme. Vzhľadom na
jednu sústavu teleso môže byť v pohybe, ale vzhľadom na druhú môže byť v pokoji. Čiže všeobecne má zmysel
hovoriť len o relatívnom pohybe.
Obr. 2.1. Pravouhlá pravotočivá súrad-
nicová sústava viazaná na teleso.
0
x
y
z

19
Obecný pohyb tuhého telesa je pohyb zložený z pohybu posuvného a otáčavého a každú
z týchto zložiek môžeme určiť pohybom niektorého bodu daného telesa.
Z týchto dôvodov sa teda naučíme najprv opísať pohyb hmotného bodu, ktorý zavedieme
touto definíciou: Hmotný bod je teleso, ktorého geometrické rozmery môžeme vzhľadom na
ostatné vzdialenosti vystupujúce pri pohybe zanedbať.
2.2 Základné veličiny charakterizujúce pohyb
Polohový vektor. Z hľadiska kinematiky môžeme tvrdiť, že skúmaný pohyb hmotného
bodu poznáme, keď vieme vyjadriť funkčnú závislosť medzi jeho súradnicami a časom. Ak sú
jeho súradnice v čase nepremenné (konštantné), hmotný bod je v pokoji. Pohyb hmotného
bodu je teda opísaný rovnicami
tzztyytxx ; ; (2.1)
Polohu hmotného bodu možno udať aj jeho polohovým vektorom r. Je to vektor, ktorý
má začiatočný bod v začiatku súradnicovej sústavy a koncový bod v mieste, kde sa hmotný
bod práve nachádza (obr. 2.3). Možno ho vyjadriť pomocou súradníc x, y, z takto
kjir zyx (2.2)
V tomto vzťahu i, j, k sú jednotkové vektory v smere
kladných polosí x, y, z. Ak r nezávisí od času, hmotný
bod je v pokoji a ak je funkciou času, hmotný bod sa
pohybuje a
kjirr tztytxt (2.3)
Ak poznáme časovú závislosť polohového vekto-
ra, môžeme zistiť po akej krivke – trajektórii sa
hmotný bod pohybuje.
Rýchlosť. V praxi nás často zaujíma nielen to, po akej trajektórii sa hmotný bod
pohybuje, ale aj to, ako „rýchlo“ sa pohybuje. Rýchlosťou budeme nazývať dráhu, ktorú
Obr. 2.2. Pohyb telesa: a) posuvný – každá priamka a rovina zostáva rovnobežná so
svojou začiatočnou polohou, všetky body majú súčasne rovnaké rýchlosti a zrýchlenia,
b) otáčavý – všetky body telesa konajú pohyb po kružniciach okolo spoločnej osi
rotácie, všetky body telesa majú súčasne rovnaké uhlové rýchlosti a zrýchlenia.
Obr. 2.3. Polohu hmotného bodu udá-
va polohový vektor.
0
x
y
z
r
m
ij
k
1 2
3 1
2
a b

20
prejde hmotný bod za jednotku času. Takouto definíciou je však definovaná len veľkosť
rýchlosti. Úplná definícia rýchlosti musí obsahovať aj smerové vlastnosti pohybu. Vektor
okamžitej rýchlosti v je definovaný vzťahom
ttt d
d
Δ
Δ lim
0Δ
rr
v (2.4)
Význam veličín a obsah vzťahu (2.4) je znázornený na obr. 2.4.
Ak polohový vektor r vyjadríme v zložkovom tvare, dostaneme vektor rýchlosti
v zložkovom tvare
kjikjikjir
zyxt
z
t
y
t
xzyx
ttvvv
d
d
d
d
d
d
d
d
d
dv (2.5)
z čoho vyplýva, že veľkosti zložiek rýchlosti v smere súradnicových osí sú
t
z;
t
y;
t
xzyx
d
d
d
d
d
d vvv (2.6)
Veľkosť rýchlosti vypočítame zo vzťahu
t
s
d
dv (2.7)
kde tss je dráha hmotného bodu, alebo, ak poznáme zložky vektora rýchlosti, zo vzťahu
222
zyx vvvv (2.8)
Častokrát sa používa aj priemerná rýchlosť, ktorá je definovaná ako rýchlosť, ktorou by
sa musel trvale pohybovať hmotný bod, aby za časový interval t (za dobu t) prešiel dráhu s
(dráhu s)
t
s
Δ
Δp v (2.9)
Jednotkou rýchlosti je .-1s . m 1
Obr. 2.4. K vysvetleniu vektora okamžitej rýchlosti. Ak sa časový interval t blíži k nule, vektor rýchlosti
nadobúda veľkosť a smer vektora okamžitej rýchlosti v. Vektor v má smer dotyčnice ku trajektórii.
0 0 0
x x x
y y y
z z z
r
r
r
r
rr r
t t t
t
t
0 0
0 0
_
_
_
_
_
_

21
Zrýchlenie je ďalšia dôležitá veličina charakterizujúca pohyb. Súvisí so zmenou
rýchlosti a je definované nasledujúco
2
2
0Δ d
d
d
d
Δ
Δ lim
tttt
ra
vv (2.10)
Vlastnosti vektora zrýchlenia ozrejmuje obr. 2.5.
Vektor zrýchlenia vyjadrený v zložkovom tvare je
kjikjikjikjia zyxzyx
zyx aaat
z
t
y
t
x
ttttt
2
2
2
2
2
2
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d
d vvvvvv
v
(2.11)
z čoho vyplýva, že veľkosti zložiek zrýchlenia sú
2
2
2
2
22
2
d
d
d
d
d
d
d
d
d
d
d
d
t
z
ta;
t
y
ta;
t
x
ta z
z
y
yx
x vvv
(2.12)
Veľkosť vektora zrýchlenia vypočítame zo vzťahu
222
zyx aaaa (2.13)
Treba si uvedomiť, že rýchlosť a zrýchlenie, tak ako sme ich definovali, sú všeobecnejšie
ako pojmy dané len skúsenosťou. Napríklad zrýchlenie môže byť nenulové aj vtedy, keď sa
nemení veľkosť rýchlosti, ale len jej smer, pozri obr. 2.5.
2.3 Klasifikácia pohybov
Najjednoduchšiu klasifikáciu mechanických pohybov hmotného bodu môžeme urobiť
pomocou analýzy vektora rýchlosti. Vektor rýchlosti v môžeme vyjadriť pomocou jeho
veľkosti v a jednotkového vektora v smere v : τvv (obr. 2.6). Potom
1) Ak ,konštτ hmotný bod sa pohybuje po priamke a takýto pohyb nazývame
priamočiary. Tento môže byť rovnomerný (ak konštv ) alebo nerovnomerný (ak
konštv ).
Obr. 2.5. K vysvetleniu vektora zrýchlenia. Ak sa časový interval t blíži k nule, vektor zrýchlenia
nadobúda veľkosť a smer vektora okamžitého zrýchlenia a.
0 0 0
x x xy y y
zz z
t t t
t
t
0 0
0 0
0 0
a a
a
_ _
22
2) Ak ,konštτ hmotný bod sa môže pohybovať po ľubovoľnej krivke a takýto pohyb
nazývame pohyb krivočiary. Tento môže byť znova rovnomerný (ak konštv ) alebo
nerovnomerný (ak konštv ).
Z definície rýchlosti (2.4) vyplýva, že td d vr .
Integráciou dostaneme vzťah pre polohový vektor
t
t
0
0 d vrr (2.14)
kde r0 je polohový vektor v čase t = 0.
V nasledujúcich podkapitolách budeme skúmať
pohyby, opierajúc sa o vyššie uvedenú klasifikáciu.
Príklad 2.1. Pohyb hmotného bodu je určený rovnicami ,BA 2 tx ,DC 2 ty
kde ,, -2s . m 20A ,, m 050B ,, -2s . m 150C m. 030D , Treba nájsť veľkosť aj smer
rýchlosti a zrýchlenia v čase s 2t a klasifikovať pohyb.
Riešenie: Polohový vektor pohybujúceho sa hmotného bodu je
jijirr DC BA 22 tttytxt
Deriváciou podľa času dostaneme okamžitú rýchlosť hmotného bodu
jiji
r C2 A2 DC BA
d
d
d
d 22 tttttt
ttv
a deriváciou rýchlosti dostaneme jeho zrýchlenie
jijia C2 A2 C2 A2
d
d
d
d tt
tt
tv
Ako vidno, zrýchlenie nezávisí od času – je konštantné.
Vektory rýchlosti a zrýchlenia v čase s 2t sú
jiji s . m 60 s . m 80 s 2 .s . m 0,15 . 2 2s s . m 20 . 2 -1-1-2-22 ,,., v
jijia s . m 30 s . m 40 s . m 0,15 . 2 s . m 0,2 . 22 -2-2-2-2 ,,
a ich veľkosti sú
1-21-21- s . m 1s . m 60s . m 802 ,,v
2-22-22- s . m 50s . m 30s . m 402 ,,,a
Obr. 2.6. Ku klasifikácii pohybov.
0
r
v =

23
Smery vektorov rýchlosti a zrýchlenia v čase s 2t určíme pomocou smerových
kosínusov ( v a a sú uhly, ktoré zvierajú vektory v a a s kladným smerom osi x)
80s . m 1
s . m 801-
-1
,,
cos v
vxv
80s . m 0,5
s . m 402-
-2
,,
cos a
axa
Z toho, že smerové kosínusy vektora rýchlosti i zrýchlenia sú rovnaké a vektor zrýchlenia
nezávisí od času možno usúdiť, že hmotný bod sa pohybuje rovnomerne zrýchleným
priamočiarym pohybom. Toto tvrdenie možno dokázať aj tak, že zo vzťahov pre x-ovú a
y-ovú súradnicu pohybujúceho sa hmotného bodu
BA 2 tx
DC 2 ty
vylúčime čas. Z prvej rovnice vyjadríme 2t
A
B2
xt
a dosadíme do druhej rovnice, čím získame vzťah
A
CBD
A
Cxy
čo je rovnica priamky.
2.4 Priamočiary pohyb
Priamočiary pohyb, ako sme uviedli v predchádzajúcej podkapitole je charakterizovaný
tým, že jednotkový vektor τ v smere vektora rýchlosti je časovo nepremenný .konštτ
2.4.1 Rovnomerný priamočiary pohyb
Ak okrem vyššie spomínanej podmienky platí, že konštv ide o rovnomerný
priamočiary pohyb (obr. 2.7a). Polohový vektor v tomto prípade možno vyjadriť takto
tt
t
0
0
0 d vv rrr (2.15)
Keď stotožníme pohyb po priamke s pohybom, napr. v smere osi x, (obr. 2.7b), môžeme
písať iir sx ; iir 000 sx ; i vv . Potom vzťah (2.15) možno napísať ako
iii tss 0 v (2.16)
24
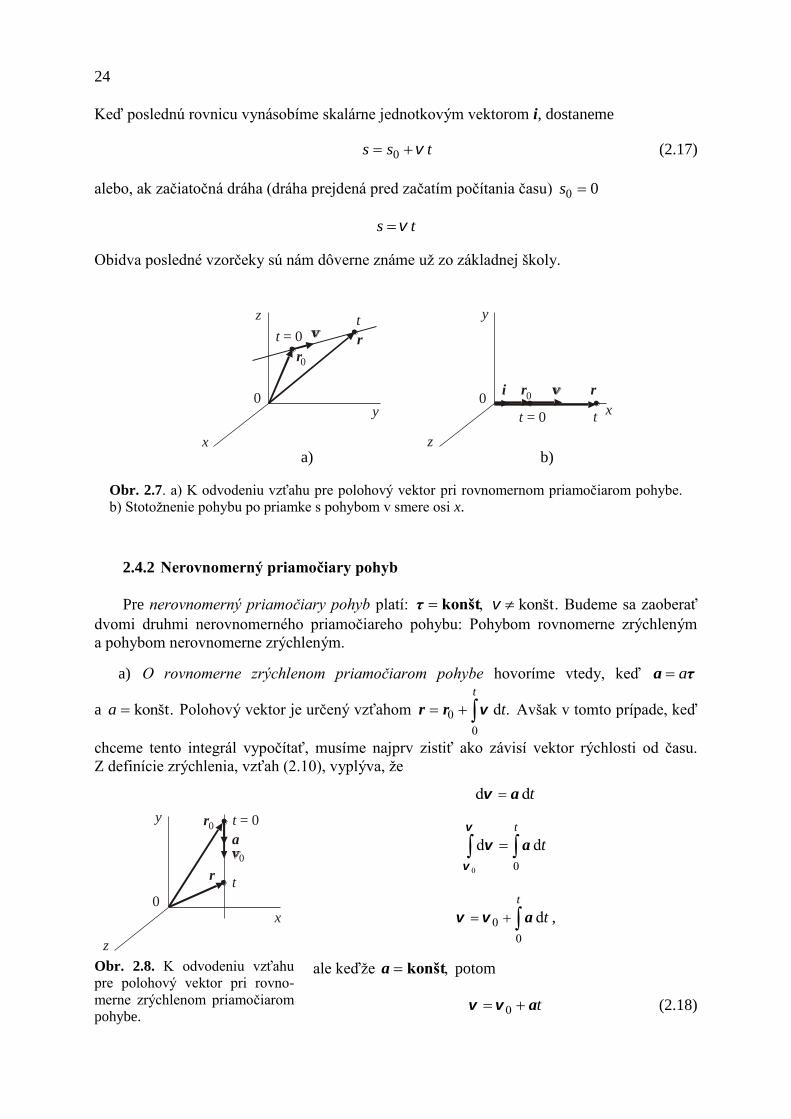
Keď poslednú rovnicu vynásobíme skalárne jednotkovým vektorom i, dostaneme
tss 0 v (2.17)
alebo, ak začiatočná dráha (dráha prejdená pred začatím počítania času) 00 s
ts v
Obidva posledné vzorčeky sú nám dôverne známe už zo základnej školy.
2.4.2 Nerovnomerný priamočiary pohyb
Pre nerovnomerný priamočiary pohyb platí: ,konštτ konšt.v Budeme sa zaoberať
dvomi druhmi nerovnomerného priamočiareho pohybu: Pohybom rovnomerne zrýchleným
a pohybom nerovnomerne zrýchleným.
a) O rovnomerne zrýchlenom priamočiarom pohybe hovoríme vtedy, keď τa a
a konšt.a Polohový vektor je určený vzťahom
t
t
0
0 .d vrr Avšak v tomto prípade, keď
chceme tento integrál vypočítať, musíme najprv zistiť ako závisí vektor rýchlosti od času.
Z definície zrýchlenia, vzťah (2.10), vyplýva, že
td d av
t
t
0
d d
0
a
v
v
v
t
t
0
0 d avv ,
ale keďže ,konšta potom
ta 0vv (2.18)
a) b)
Obr. 2.7. a) K odvodeniu vzťahu pre polohový vektor pri rovnomernom priamočiarom pohybe.
b) Stotožnenie pohybu po priamke s pohybom v smere osi x.
Obr. 2.8. K odvodeniu vzťahu
pre polohový vektor pri rovno-
merne zrýchlenom priamočiarom
pohybe.
0x
y
z
r
r
t
0
0
a
t = 0
0 0
x
xy
yz
z
r
r
r
r
t
t
0
0i
t = 0
t = 0

25
a polohový vektor (obr. 2.8) je
tt
t
d
0
00 arr v
a po integrácii 2
21
00 tt arr v (2.19)
Keď stotožníme smer pohybu so smerom niektorej osi, podobne ako pri rovnomernom
priamočiarom pohybe, dostaneme vzťah pre prejdenú dráhu
2
21
00 attss v (2.20)
kde s0 je začiatočná dráha a v0 začiatočná rýchlosť – rýchlosť v čase .0t Znamienko plus
pred členom 2
21 at je vtedy, keď vektor zrýchlenia a má smer vektora rýchlosti v
a znamienko mínus, ak vektor zrýchlenia má opačný smer ako vektor rýchlosti. V prvom
prípade hovoríme o rovnomerne zrýchlenom pohybe a v druhom prípade o rovnomerne
spomalenom pohybe.
b) O nerovnomerne zrýchlenom priamočiarom pohybe hovoríme vtedy, keď τa a
a konšt.a Polohový vektor je znova určený vzťahom
t
t
0
0 d vrr . V tomto prípade, keď
chceme dostať konkrétny vzťah pre polohový vektor, musíme vedieť ako závisí zrýchlenie od
času. Naznačíme preto len symbolický postup. Rýchlosť, ako funkciu času zistíme
integrovaním
t
t
0
0 d avv
Potom ju dosadíme do vzťahu pre polohový vektor. Dostaneme
t tt t
ttttt
0 0
00
0 0
00 d d d d ararr vv (2.21)
Príklad 2.2. Automobil sa rozbieha z pokoja po priamej ceste so zrýchlením, ktoré
rovnomerne rastie a to tak, že po uplynutí doby s 10 malo hodnotu .2s . m 5,5 Vypočítajte
rýchlosť, ktorú automobil za tú dobu nadobudol ako aj dráhu, ktorú za tú dobu prešiel.
Riešenie: Zo zadania úlohy vyplýva, že pohyb automobilu je priamočiary, nerovnomerne
zrýchlený. Zrýchlenie podľa zadania možno vyjadriť lineárnou funkciou času
kta .
Konštantu k určíme zo zadaných hodnôt: Vieme, že za dobu s 101 t zrýchlenie automobilu
nadobudlo hodnotu 21 s . m 5,5 a , teda

26
32
1
1 s . m 550s 10
s . m 5,5
,t
ak
Zrýchlenie automobilu potom v ľubovoľnom čase vyjadruje vzťah
t,a s . m 550 3
a jeho rýchlosť je
23
0
2
0
s . m 55,02
1
2
1d d tktttktta
tt
v (P1)
Dráhu, ktorú automobil prešiel za dobu t vypočítame takto
3332
00
s . m 55,06
1
6
1d
2
1d tktttktts
tt v (P2)
Rýchlosť a dráhu, ktorú automobil prešiel za s 10 vypočítame po dosadení tejto hodnoty
do vzťahov (P1) a (P2)
1223 s . m 27,5s 10 . s . m 0,552
1 .v
m 91,7s 10 . s . m ,5506
1 333 .s
Poznámka: Rozklad pohybov. S vektorovými rovnicami počítame zvyčajne tak, že ich
rozkladáme na zložky. Ako príklad použijeme rovnicu (2.19)
2
21
00 tt arr v
Rozpísaná v zložkovom tvare
2
21
000000 taaatzyxzyx zyxzyx kjikjikjikji vvv
Odtiaľto ľahko zistíme, že
2
21
00 tatxx xx v
2
21
00 tatyy yy v
2
21
00 tatzz zz v
Rozklad pohybov na osové zložky
uľahčuje vyšetrovanie krivočiarych
pohybov a zjednodušuje ich
numerické riešenie. Ako príklad môže
slúžiť pohyb hmotného bodu v gravitačnom poli Zeme. Takýto pohyb je pohyb rovinný,
a preto pri jeho opise vystačíme s dvoma súradnicami, napr. x a y. Napríklad pri šikmom vrhu
Obr. 2.9. Šikmý vrh v gravitačnom poli Zeme.
0
0
0
x
y
y
( )x, y
0y
0x

27
postupujeme tak, že riešime nezávisle pohyb v smere osi x a potom v smere osi y. Pre pohyb
v smere osi x dostaneme rovnice (pozri obr. 2.9):
cos 00 vvv xx
cos 0tx v
Pre pohyb v smere osi y: ga
gtgtyy sin 00 vvv
200
2
1sin gttyy v
Príklad 2.3. Z budovy vysokej 12 m hodíme kameň rýchlosťou 1s . m 15 pod elevačným
uhlom 50°. Treba nájsť: a) vzťah pre trajektóriu, po ktorej sa pohybuje kameň, b) dobu, za ktorú
dosiahne maximálnu výšku, c) maximálnu výšku, do ktorej kameň vystúpi, d) dobu, za ktorú
dopadne a e) vodorovnú vzdialenosť miesta dopadu od miesta vrhu.
Riešenie: a) Trajektóriu pohybu kameňa dostaneme vylúčením času z rovníc
cos 0tx v
200
2
1sin gttyy v
Z prvej rovnice vyjadríme t
cos 0v
xt
a dosadíme do druhej
20
2
0cos 2
1 tg
v
xgxyy
Tento vzťah je rovnica paraboly. Dosadením číselných hodnôt zo zadania dostaneme
2122
21
2
m 10285191m 1250 cos s . m 15
s . m 819
2
1 50 tgm 12 x.,x,x
.
,.xy
b) V najvyššom bode trajektórie je zložka rýchlosti yv rovná nule. Teda platí rovnica
m0 0 gty sinvv
z ktorej určíme dobu, za ktorú kameň dosiahne maximálnu výšku
s 171s . m 9,81
50sin s . m 15sin 2
1
0m ,
.
gt
v

28
c) Maximálnu výšku, do ktorej kameň vystúpi dostaneme, keď do vzťahu pre y-ovú
súradnicu dosadíme čas mt
m 718s 1,17 s . m 8192
150sin . s 1,17 s . m 15m 12
2
1 22212
mm00m ,.,..gtsintyy v
d) Pri dopade kameňa 0y a z tejto podmienky vypočítame čas dopadu kameňa
2dd00
2
1sin 0 gttyy v
Je to kvadratická rovnica, ktorej riešením je
g
gyt
02
00d1,2
2 sinsin vv
s 3,13 s; 7830
s . m 819
m 12 . s . m 9,81 . 250sin s . m 1550sin s . m 152
2211
,,
..
Nášmu problému vyhovuje riešenie s. 133d ,t
e) Vodorovnú vzdialenosť od miesta vrhu vypočítame, keď do vzťahu pre x-ovú
súradnicu dosadíme dt
m 30,250 cos . s 3,13 s . m 15cos 1
d0d .tx v
2.5 Príklad krivočiareho pohybu – pohyb po kružnici
2.5.1 Základné charakteristiky
Pohyb po kružnici je krivočiary pohyb, ktorý má akési „výsadné” postavenie. Po
kružnici, v prvom priblížení, obiehajú planéty okolo Slnka. Ďalej pri otáčaní tuhého telesa
okolo pevnej osi sa jednotlivé body telesa pohybujú po kružniciach a nakoniec priamočiarym
pohybom a pohybom po kružniciach môžeme nahradiť ľubovoľný krivočiary pohyb
hmotného bodu, keď si zavedieme pojmy oskulačnej roviny a oskulačnej kružnice. Každú
krivku možno totiž v bezprostrednom okolí niektorého jej bodu nahradiť oblúkom kružnice
určitého polomeru r, ktorý sa nazýva polomer krivosti krivky v danom mieste, alebo tiež
polomer oskulačnej kružnice. Pod oskulačnou kružnicou rozumieme kružnicu určenú tromi
nekonečne blízkymi bodmi v danom mieste krivky. Tromi bodmi je totiž určená jediná
kružnica. Týka sa to aj troch nekonečne blízkych bodov.
Pre charakteristiku kruhových pohybov zavádzame analogické veličiny veličinám s, r, v,
a, ktoré sme zaviedli pri lineárnych pohyboch, a to: uhlovú dráhu , vektor uhla , uhlovú
rýchlosť ω a uhlové zrýchlenie .
Uhlová dráha je uhol vytvorený sprievodičom pohybujúceho sa hmotného bodu
a sprievodičom zvoleným za základ. Vektor uhla je vektor kolmý na ramená uhla
29
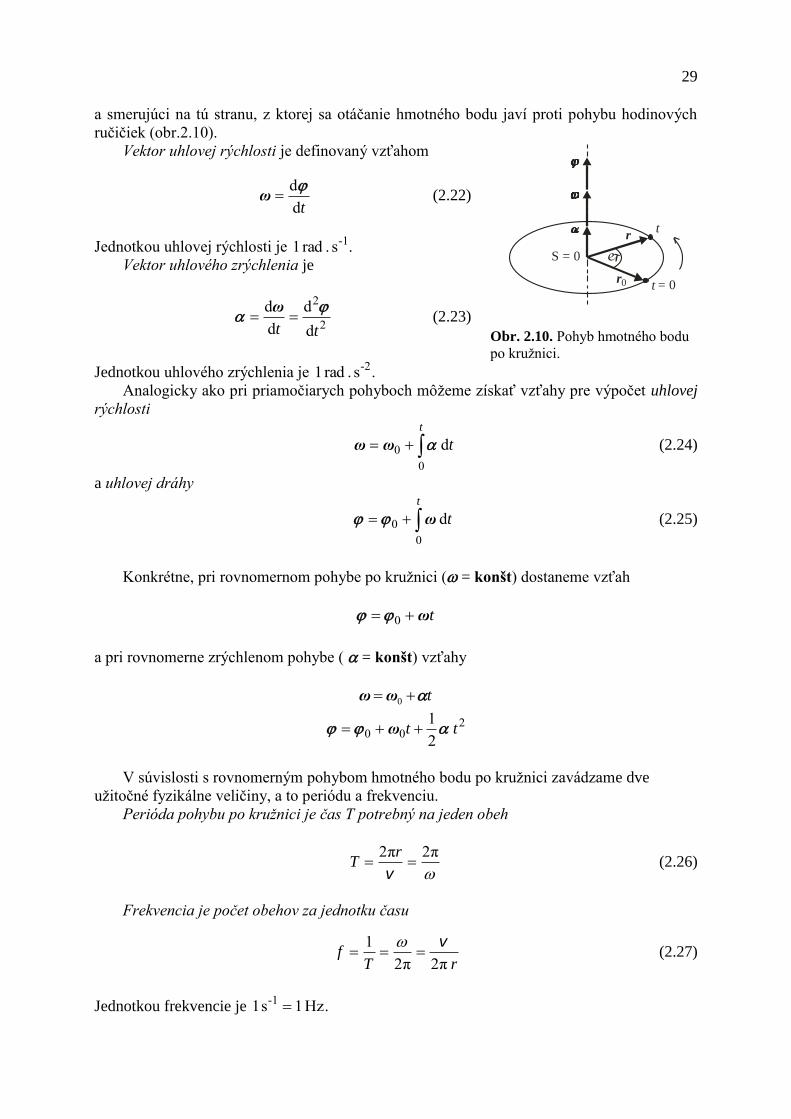
a smerujúci na tú stranu, z ktorej sa otáčanie hmotného bodu javí proti pohybu hodinových
ručičiek (obr.2.10).
Vektor uhlovej rýchlosti je definovaný vzťahom
td
dω (2.22)
Jednotkou uhlovej rýchlosti je .s . rad 1 -1
Vektor uhlového zrýchlenia je
2
2
d
d
d
d
tt
ω (2.23)
Jednotkou uhlového zrýchlenia je .s . rad 1 -2
Analogicky ako pri priamočiarych pohyboch môžeme získať vzťahy pre výpočet uhlovej
rýchlosti
t
t
0
0 d ωω (2.24)
a uhlovej dráhy
t
t
0
0 d ω (2.25)
Konkrétne, pri rovnomernom pohybe po kružnici ( = konšt) dostaneme vzťah
tω 0
a pri rovnomerne zrýchlenom pohybe ( = konšt) vzťahy
t 0ωω
200
2
1tt ω
V súvislosti s rovnomerným pohybom hmotného bodu po kružnici zavádzame dve
užitočné fyzikálne veličiny, a to periódu a frekvenciu.
Perióda pohybu po kružnici je čas T potrebný na jeden obeh
π2π2
v
rT (2.26)
Frekvencia je počet obehov za jednotku času
rTf
π2π2
1 v
(2.27)
Jednotkou frekvencie je Hz.1s 1 -1
Obr. 2.10. Pohyb hmotného bodu
po kružnici.
r
r
0
t
S = 0
t = 0

30
2.5.2 Rýchlosť a zrýchlenie pri pohybe hmotného bodu po kružnici
Uvažujme pohyb hmotného bodu po kružnici podľa obr. 2.11. So stredom kružnice
stotožníme začiatok súradnicovej sústavy s kladnými smermi osí podľa obrázku. Pretože
pohyb po kružnici je rovinný pohyb, môžeme polohový vektor hmotného bodu vyjadriť takto
njijir rrrr sin + cos sin cos (2.28)
kde r je polomer kružnice, – uhol, ktorý zviera sprievodič hmotného bodu s kladným
smerom osi x, i, j, k – jednotkové vektory v smere osí x, y a z, n – jednotkový vektor v smere
polohového vektora. Rýchlosť pohybujúceho sa hmotného bodu je potom
ττjijir
v
cos sin cos
d
d sin
d
d
d
d
rr
ttr
tv (2.29)
kde tdd je veľkosť uhlovej rýchlosti,
τ – jednotkový vektor v smere vektora rých-
losti v a rv – veľkosť obvodovej
rýchlosti. Jednotkový vektor τ môžeme
vyjadriť pomocou vektorového súčinu
jednotkových vektorov k a n
nkτ
a potom dosadením za τ do vzťahu (2.29)
dostaneme súvis medzi vektorom obvodovej
rýchlosti v a vektorom uhlovej rýchlosti ω
rωnknkr
rrt
d
dv (2.30)
Poznámka: Všimnime si podrobnejšie vzťah rωr tdd . Tento vzťah tvrdí, že časová derivácia
vektora, ktorý má konštantnú veľkosť (veľkosť vektora r sa nemení – pozri obr. 2.11) je rovná vektorovému
súčinu vektora uhlovej rýchlosti stáčania sa vektora a tohto vektora. Tento poznatok môžeme zovšeobecniť pre
časovú deriváciu ľubovoľného jednotkového vektora, napr. iωi tdd .
Zrýchlenie hmotného bodu pri pohybe po kružnici je
ntd
d
d
d
d
d
d
daarωωr
rωr
ωrωa
tttt
v (2.31)
kde at je tangenciálne zrýchlenie – zrýchlenie súvisiace so zmenou veľkosti rýchlosti
τnkra t rr (2.32)
a an je normálové (dostredivé) zrýchlenie súvisiace so zmenou smeru pohybu
nrωωrrωωrωωa 22
n r (2.33)
pretože 0 rω .
Obr. 2.11. Rýchlosť a zrýchlenie pri pohybe
hmotného bodu po kružnici.
r
y
x
z
0i
jk
n
r cos
r sin
aa
a tn

31
Celkové zrýchlenie môžeme vyjadriť aj takto
tttt d
d
d
d
d
d
d
d ττ
τa v
vv
v (2.34)
Veľkosti tangenciálneho, normálového a celkového zrýchlenia pri pohybe hmotného
bodu po kružnici sú teda
2n
2t
22
nt ; d
daaa
rrar
ta v
vv (2.35)
Príklad 2.4. Koleso s polomerom 10 cm sa krúti tak, že jeho uhlová dráha závisí od času
podľa vzťahu 3CBA ttt , kde 31 s . rad 1C s . rad 2 Brad, 3A , . Treba určiť
uhlovú dráhu, uhlovú rýchlosť, uhlové zrýchlenie, obvodovú rýchlosť, tangenciálne, normálové
a celkové zrýchlenie bodov na obvode kolesa v čase s. 2t
Riešenie: Uhlová dráha prejdená bodmi kolesa za dobu 2 s je
rad 15s 2 s . rad 1s 2 s . rad 2rad 3CBA2 33313 ..tt
Uhlová rýchlosť v závislosti od času je
23 C3BCBAd
d
d
dttt
ttt
a v čase s 2t
12231 s . rad 14s 2 ..s rad 1 . 3s . rad 22
Uhlové zrýchlenie kolesa ako funkcia času
tttt
t C6C3Bd
d
d
d 2
a v čase s 2t
23 s . rad 12s 2 s . rad 1 . 62 .
Obvodová rýchlosť bodov na obvode kolesa sa vypočíta zo vzťahu
Rv
a teda v čase s 2t je
11 s . m 1,4 m 0,1 s 1422 .Rv
Tangenciálne zrýchlenie v čase s 2t je
22t s . m 1,2m 0,1 s 1222 .Ra
normálové zrýchlenie
2222n s . m 619m 0,1 s 142 ,.Ra

32
a celkové zrýchlenie
222222
n
2
t s . m 619s . m 619s . m 21222 ,,,aaa
Príklad 2.5. Pohyb hmotného bodu je určený polohovým vektorom jir tt C BA 2 ,
kde m, 5A ,s . m 52B 2-, 1s . m 5C - . Treba určiť:
a) Vektor rýchlosti a zrýchlenia,
b) veľkosť rýchlosti, celkového zrýchlenia, tangenciálneho a normálového zrýchlenia v čase
s, 2t
c) klasifikujte pohyb.
Riešenie: a) Vektor rýchlosti dostaneme deriváciou polohového vektora podľa času
jiji
rCB2C BA
d
d
d
d 2 ttttt
ttv
a po dosadení číselných hodnôt nadobudne tvar
ji s . m 5 s . m 5 12 ttv
Vektor zrýchlenia je
ijia B2CB2d
d
d
d t
ttt
tv
a po dosadení číselných hodnôt
iaa s . m 5 2t
b) Najskôr si napíšeme vektory rýchlosti a zrýchlenia v čase s 2t
ji ji s . m 5s . m 10 s . m 5 s 2 . s . m 5 11122
v
ia s . m 52 2
keďže zrýchlenie nie je funkciou času.
Veľkosť rýchlosti a zrýchlenia v čase s 2t je potom
1212122 s . m 2,11s . m 5s . m 102 yx vvv
a
2s . m 52 a
Veľkosť tangenciálneho zrýchlenia vypočítame deriváciou veľkosti rýchlosti (ako
funkcie času)
33
2222222 CB4CB2 ttyx vvtv
teda
tv
tv t
t
tt
ttta
2
222
2222
t
B4
CB4
B4CB4
d
d
d
d
Veľkosť tangenciálneho zrýchlenia v čase s 2t je
2
1
222
t s . m 46,4s . m ,211
s 2 s . m 5,2 . 4
2
B42
.t
av
Veľkosť normálového zrýchlenia v čase s 2t vypočítame zo vzťahu
2-22222
t
2
n s . m ,262s . m ,464s . m 5222 aaa
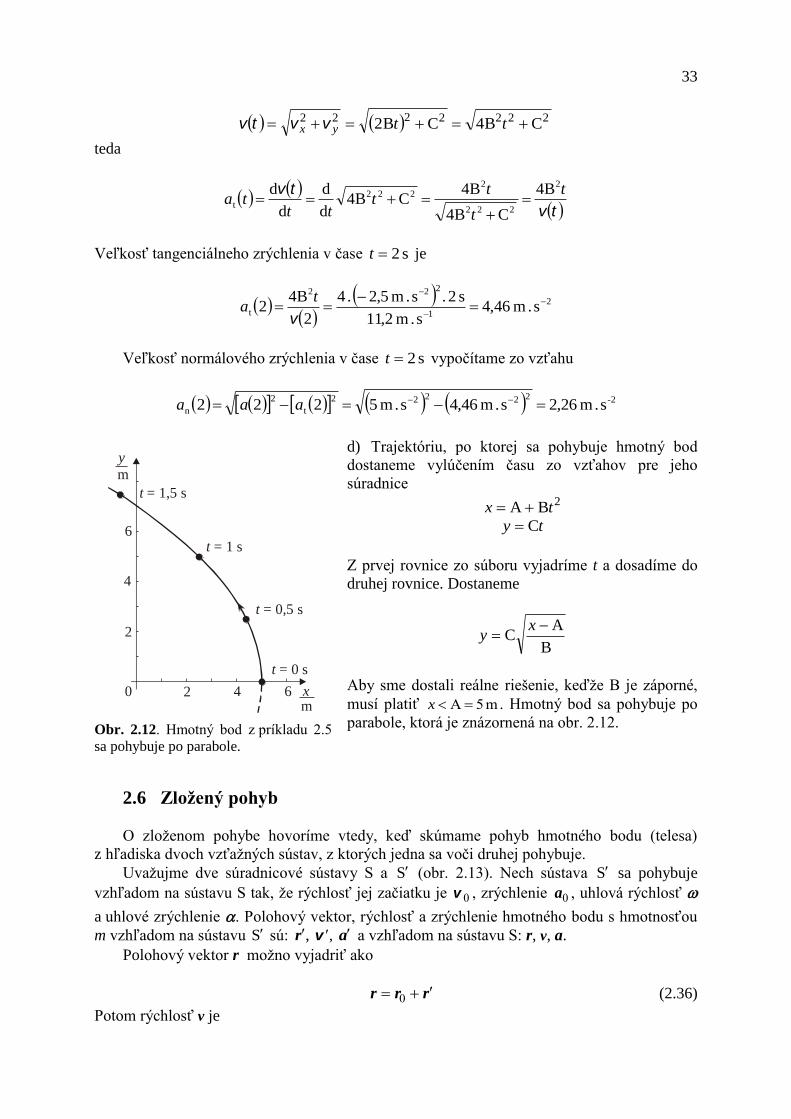
d) Trajektóriu, po ktorej sa pohybuje hmotný bod
dostaneme vylúčením času zo vzťahov pre jeho
súradnice 2BA tx
ty C
Z prvej rovnice zo súboru vyjadríme t a dosadíme do
druhej rovnice. Dostaneme
B
AC
xy
Aby sme dostali reálne riešenie, keďže B je záporné,
musí platiť m 5A x . Hmotný bod sa pohybuje po
parabole, ktorá je znázornená na obr. 2.12.
2.6 Zložený pohyb
O zloženom pohybe hovoríme vtedy, keď skúmame pohyb hmotného bodu (telesa)
z hľadiska dvoch vzťažných sústav, z ktorých jedna sa voči druhej pohybuje.
Uvažujme dve súradnicové sústavy S a S (obr. 2.13). Nech sústava S sa pohybuje
vzhľadom na sústavu S tak, že rýchlosť jej začiatku je 0v , zrýchlenie 0a , uhlová rýchlosť
a uhlové zrýchlenie . Polohový vektor, rýchlosť a zrýchlenie hmotného bodu s hmotnosťou
m vzhľadom na sústavu S sú: ar ,, v a vzhľadom na sústavu S: r, v, a.
Polohový vektor r možno vyjadriť ako
rrr 0 (2.36)
Potom rýchlosť v je
Obr. 2.12. Hmotný bod z príkladu 2.5
sa pohybuje po parabole.
t = 0 s
t = 0,5 s
t = 1 s
t = 1,5 s
x
y
2
2
4
4
6
6
m
m
0

34
tttt d
d
d
d
d
d
d0
0 rrrr
vv
d
V tomto vzťahu upravíme druhý člen (pozri poznámku v časti 2.5.2)
rkjikji
kk
jj
iikji
r
vzyx
tz
t
z
ty
t
y
tx
t
xzyx
tt
zyx vvv
d
dd
d
d
d
d
d
d
d
d
d
d
d
d
d
a vzťah pre rýchlosť v možno upraviť takto
rω vvv 0 (2.37)
Zrýchlenie a vzhľadom na sústavu S do-
staneme deriváciou rýchlosti v
rrωωωaa
rω
rωa
v
vv
vvv
2
d
d
d
d
d
d
d
d
d
d
0
0
0
ttt
tt
(2.38)
Pri odvodzovaní vzťahu (2.38) sme použili
nasledujúce úpravy
v
v
ωakωjωiωkji
kk
jj
iikji
zyxzyx
zz
yy
xx
zyx
aaa
tttttttt
vvv
vv
vv
vv
vvvd
d
d
d
d
dd
d
d
d
d
d
d
d
d
d
a
rωωωrrωωrr
ωrω
rω
vv ttt d
d
d
d
d
d
Rýchlosť a zrýchlenie vzhľadom na čiarkovanú sústavu S možno teda vyjadriť vzťahmi
rω 0vvv (2.39)
aaaaarrωωωaaa odC00 2 v (2.40)
kde v ωa 2C je Coriolisovo zrýchlenie, rωωa od – odstredivé zrýchlenie
a zrýchlenie ra súvisí s uhlovým zrýchlením čiarkovanej súradnicovej sústavy.
Obr. 2.13. Zložený pohyb. Sústava S´ sa pohy-
buje vzhľadom na sústavu S.
0
0
0
x
x
y
yy
z
z
´
´
´
´
´
´
´
´
´
rr
r
i
i
j
jk
kS
Sm

35
Príklad 2.6. Automobil sa pohybuje rovnomerným priamočiarym pohybom rýchlosťou
.-1s . m 10 Pri jazde sa do pneumatiky zachytil kamienok. Určte jeho polohu vzhľadom na bod,
kde pôvodne kamienok ležal a jeho okamžitú rýchlosť po uplynutí doby s 10 od zachytenia
kamienka. Polomer kolesa je m. 0,5
Riešenie: Pohyb kamienka môžeme riešiť ako zložený pohyb. Za „nehybnú“ súradnicovú
sústavu S zvolíme súradnicovú sústavu so začiatkom 0 stotožneným s bodom, kde kamienok
ležal a s osami x a y orientovanými tak, ako je znázornené na obr. 2.14. S otáčajúcim sa
kolesom je spojená súradnicová sústava .S Jej začiatok 0 je v strede kolesa a vzhľadom na
sústavu S sa pohybuje rýchlosťou 0v (rýchlosťou auta) a rotuje okolo svojho začiatku
uhlovou rýchlosťou ω .
Polohový vektor r kamienka, v čase t, vzhľadom na sústavu S možno vyjadriť vzťahom
(pozri vzťah (2.36))
rrr 0 (P1)
a rýchlosť kamienka vzťahom (pozri aj (2.37)
rω vvv 0
Rýchlosť v je rýchlosť kamienka vzhľadom na rotujúcu sústavu S a keďže kamienok rotuje
spolu so sústavou S a nachádza sa v nemennej vzdialenosti od osi rotácie, 0v . Potom
rω 0vv (P2)
Ďalej, vektor 0r vo vzťahu (P1) možno vyjadriť v zložkovom tvare ako
jijir RtRx 000 v (P3)
kde 0x je posunutie stredu kolesa za dobu t a R – polomer kolesa.
Vektor r možno v sústave S vyjadriť v zložkovom tvare ako
jijir sin cos RRrr yx
Obr. 2.14. V mieste zachytenia kamienka je začiatok inerciálnej súradnicovej sústavy S.
Sústava S je viazaná na koleso a vzhľadom na sústavu S sa pohybuje rýchlosťou 0v
(rýchlosťou auta) a rotuje spolu s kolesom uhlovou rýchlosťou .
x
´
´
´´
´
´y
y
0
0
z
r
r
r t
i
i
j
j
k
t = 0 tSS
0
0

36
a keďže ,π23 t a teda ,sinsin . πsincos . πcosπ coscos
23
23
23 tttt
a ďalej ,cosπ sinsin23 tt možno r vyjadriť takto
jir cos sin tRtR (P4)
Po dosadení vzťahov (P3) a (P4) do vzťahu (P1) dostaneme pre polohový vektor r
kamienka v čase t vyjadrenie
jijijir cos1 sin cos sin 00 tRtRttRtRRt vv (P5)
Vektor uhlovej rýchlosti rotácie súradnicovej sústavy S (aj kolesa) možno vyjadriť ako
kω (pozri obr. 2.14). Potom vzťah (P2) pre okamžitú rýchlosť kamienka možno
upraviť takto
ji
iji
jiki
sin cos1
cos sin
cos sin
00
0
0
tt
tRtR
tRtR
vv
v
v
v
(P6)
Pri úprave vzťahu (P6) sme použili súvis medzi veľkosťou uhlovej a obvodovej rýchlosti
kamienka, .R0v Uvedomme si, že obvodová rýchlosť kamienka (bodu na povrchu kolesa)
je rovná rýchlosti, ktorou sa pohybuje automobil.
Napokon určíme súradnice kamienka v čase t (zo vzťahu (P5))
tR
Rttxx 00 sin
vv
t
RRtyy 0cos1
v (P7)
kde sme znovu použili úpravu R0v .
Pre veľkosť rýchlosti v kamienka v čase t podľa vzťahu (P6) platí
t
Rtt 0
0
22
0
22
0 cos12sin cos1v
vvvv (P8)
Po dosadení číselných hodnôt do vzťahov (P7) a (P8) dostaneme
m ,437100s 10 . m 0,5
s . m 10sin . m ,50s 10 . s . m 1010
11
x
m 0,256s 10 . m 0,5
s . m 10 cos1 . m 0,510
1
y
11
1 s . m 10,127s 10 . m 0,5
s . m 10 cos1 . 2 s . m 1010
v
37
2.7 Newtonove pohybové zákony
Newtonove zákony sú základnými zákonmi dynamiky. Dynamika rieši problémy príčiny
a následku v mechanike. Hľadá teda odpoveď na otázky: Čo zapríčiňuje pohyb? Aký druh
pohybu vzniká, keď je známa príčina? Treba si však uvedomiť, že pri týchto úvahách ide len
o relatívny pohyb a jeho zmeny. Z hľadiska fyziky nemá zmysel pýtať sa čo je príčinou
pohybu vôbec, pretože pohyb je spätý so samotnou existenciou hmoty.
V Newtonových zákonoch vystupujú veličiny sila a hmotnosť. Je užitočné, skôr než si
budeme formulovať Newtonove zákony, pomocou ktorých sú vlastne tieto veličiny
definované exaktne, urobiť si o týchto veličinách istú predstavu na základe každodenných
skúseností.
Hmotnosť. Hmotnosť je mierou zotrvačných (i gravitačných) vlastností telesa. Je mierou
odporu telesa proti zmene jeho pohybového stavu. Teleso s väčšou hmotnosťou ťažšie
zastavíme (pohneme), než teleso s menšou hmotnosťou. Samozrejme, pri ináč rovnakých
podmienkach. Jednotkou hmotnosti je 1 kg (kilogram).
Sila. Zmeny v povahe pohybu telies vznikajú ako následok interakcie (vzájomného
pôsobenia) telies, čo je poznatok získaný skúsenosťou. Kvôli jednoduchšej charakteristike
týchto javov človek si vytvoril užitočný pojem – silu. Sila je teda miera vzájomného
pôsobenia telies. Nemôže existovať sama o sebe – telesá pôsobia na seba prostredníctvom
polí (gravitačného, elektromagnetického, ...).
Predstavte si, že tlačíte rukou na nejaké teleso (napr. na stôl). Hovoríme, že pôsobíte na
teleso silou. Takúto silu, ktorá je výsledkom priameho kontaktu telies, nazývame kontaktnou
silou. Inou známou silou je tiaž telesa. Je to sila, ktorou pôsobí Zem na teleso. Ak problém
zjednodušíme, môžeme ju považovať za gravitačnú silu. Ďalšími druhmi síl sú elektrické
a magnetické sily, ktoré môžeme zahrnúť pod spoločný názov elektromagnetické interakcie.
A napokon, pri štúdiu jadra atómu sa stretneme s tzv. silnými a slabými interakciami.
Kurzívou písané sily sú štyri základné druhy síl, ktoré pozorujeme vo svete.
Zo skúseností vyplýva, že sila je: 1. vektorová veličina, 2. vyskytuje sa v pároch (rukou
tlačíte na stôl – stôl tlačí na Vašu ruku), 3. môže byť príčinou toho, že teleso sa pohybuje so
zrýchlením (voľný pád), 4. môže deformovať teleso.
Všetky vyššie opísané skutočnosti zhrnul Newton do troch zákonov:
1. Newtonov zákon – zákon zotrvačnosti: Existuje súradnicová sústava, v ktorej hmotný
bod (teleso) zotrváva v pokoji alebo v rovnomernom priamočiarom pohybe, kým nie je nútené
pôsobením iných hmotných bodov (telies) svoj pohybový stav zmeniť.
2. Newtonov zákon – zákon sily: Sila pôsobiaca na hmotný bod (teleso) je rovná súčinu
jeho hmotnosti m a zrýchlenia a, ktoré mu udeľuje
aF m (2.41)
sila F je výslednica síl pôsobiacich na hmotný bod (teleso)
iFF
Jednotkou sily je 1 N (newton).
3. Newtonov zákon – akcie a reakcie: Ak teleso 1 pôsobí na teleso 2 silou 12F , potom
teleso 2 pôsobí na teleso 1 silou 21F , ktorá má rovnakú veľkosť ako sila 12F a ktorá leží ma
tej istej vektorovej priamke ako sila 12F , avšak má opačný smer
2112 FF (2.42)

38
Najväčší význam z uvedených zákonov má zákon sily, pretože ten dáva do súvisu príčinu
zmeny pohybového stavu – silu s následkom, t. j. vyvolaným zrýchlením. Praktické riešenie
dynamických problémov spočíva v tom, že na základe známej sily F sa vypočíta zrýchlenie a
(alebo aj iná veličina charakterizujúca pohyb) a potom sa už postupuje podľa vzťahov
známych z kinematiky. Rovnica (2.41) sa nazýva aj pohybová rovnica voľného hmotného
bodu.
Príklad 2.7. Teleso tvaru kvádra s hmotnosťou 4 kg sa nachádza na stole. Pomocou
laniek vedených cez kladky je spojené s voľne visiacimi závažiami s hmotnosťami 2 kg a 1 kg
(pozri obr. 2.15). Treba určiť zrýchlenie kvádra a sily namáhajúce lanká. Trenie a hmotnosti
kladiek zanedbajte.
Riešenie: Pri riešení vychádzame z Newtonovho zákona sily aF mi
i . Podľa neho
zostavené pohybové rovnice jednotlivých telies sú
11T11 aFF mg
aFF m 2T1T (P1)
2222T aFF mg
V týchto rovniciach 21 a gg FF sú tiaže závaží,
T2T1T21T a , FFFF , sú sily pôsobiace v lankách
(„ťahy“ v lankách), 21 a , mmm sú hmotnosti
telesa a závaží a 21 a , aaa sú zrýchlenia
príslušných telies (pozri tiež obr. 2.15).
Pri prepisovaní rovníc (P1) do skalárneho
tvaru si treba uvedomiť, že všetky telesá sa
budú pohybovať s rovnako veľkým zrýchlením: a aaa 21 a platí, že 1TT11T F FF a
T2T2T2 F FF . Ďalej, pri prepisovaní rovníc (P1) do skalárneho tvaru budeme sily
pôsobiace v smere pohybu písať s kladným znamienkom, proti pohybu so záporným
znamienkom (pozri obr. 2.15). Pohybové rovnice jednotlivých telies potom sú
amFFg 1T11
maFF 2T1T (P2)
amFF g 222T
Sčítaním rovníc ľahko dostaneme vzťah pre zrýchlenie telies
22
21
21
21
21s . m 40,1
kg 1kg 4kg 2
s . m 9,81 . kg 1kg 2
mmm
gmm
mmm
FFa
gg
„Ťahy“ v lankách vypočítame z prvej a tretej rovnice súboru (P2)
N 8,16s . m 40,19,81 . kg 2 21111T agmamFF g
N 11,2s . m 40,19,81 . kg 1 22222T agmamFF g
Obr. 2.15. Všetky tri telesá sa pohybujú so
zrýchlením, ktoré má rovnakú veľkosť.
m
m
m
1
1
1
1
2
2
2
2
T
T
T
T
g
g
F
F
F
F
F
F´ ´

39
Príklad 2.8. Pohyb spôsobený silou závisiacou od polohy. Modelovým príkladom je
závažie na pružine (obr. 2.16). Sila, ktorá ho vracia do rovnovážnej polohy je priamo úmerná
výchylke, má však opačný smer: yF k .
Riešenie: Potom pohybová rovnica závažia má tvar
yaF km
Po dosadení 22 dd tya a prepísaní do skalárneho tvaru
dostaneme
0d
d2
2
kyt
ym
Riešením tejto rovnice je funkcia
tyy sin 0
kde y0 je amplitúda (absolútna hodnota maximálnej výchylky
z rovnovážnej polohy), mk – uhlová frekvencia kmitavého
pohybu a – fázová konštanta. Rýchlosť a zrýchlenie pri tomto
pohybe zistíme derivovaním podľa času
tytytt
y cos sin
d
d
d
d00v
a
ytytytt
a 20
20 sin cos
d
d
d
d
v
Vidíme, že výchylka y, rýchlosť v i zrýchlenie a sú harmonickými funkciami času.
Príklad 2.9. Pohyb spôsobený silou závisiacou od rýchlosti – brzdnou silou. Sila je
nasmerovaná proti smeru pohybu: vbkF .
Riešenie: Pohybová rovnica má v tomto prípade tvar
vbkm a
Keď dosadíme za tddva a prepíšeme rovnicu do skalárneho tvaru, dostaneme
vv
bd
dk
tm
Po separácii premenných
tm
kd
d bv
v
a integrovaní dostaneme vzťah pre rýchlosť
e
0
b tmkvv
kde v0 je rýchlosť v čase .0t
Obr. 2.16. Sila pôsobiaca
na závažie na pružine má
opačný smer ako výchylka
závažia z rovnovážnej po-
lohy.
k
y
y
0
0
0m
-y
F
y
j

40
Vzťah pre prejdenú dráhu a vzťah pre zrýchlenie dostaneme integráciou (
t
txs
0
d v ),
resp. derivovaním ( ta ddv )
tmk
k
mx
b
0 be1
v
, resp. tmk
m
ka
0
b be
v
Prvé dva Newtonove zákony platia len v takých súradnicových sústavách, ktoré stoja
alebo sa pohybujú bez zrýchlenia. Také súradnicové sústavy sa nazývajú inerciálne. Za
inerciálnu sa považuje súradnicová sústava viazaná na nepohyblivé hviezdy – stálice.
Ak vyberieme neinerciálnu súradnicovú sústavu, t. j. takú, ktorá sa pohybuje so
zrýchlením (jej začiatok sa pohybuje so zrýchlením alebo súradnicová sústava rotuje) zákon
zotrvačnosti v nej neplatí a objavia sa sily, ktoré zvykneme nazývať „fiktívne” (alebo
pseudosily). Tieto nie sú podmienené prítomnosťou iných hmotných bodov (telies) v blízkosti
daného hmotného bodu (telesa). Napríklad, uvažujme súradnicovú sústavu viazanú na
železničný vagón, na ktorého podlahe sa nachádza guľa. Ak vlak začne brzdiť (spomalený
pohyb), guľa sa začne pohybovať smerom k lokomotíve pri zrýchľovaní smerom dozadu. Ak
vlak zatáča vľavo, guľa pôjde vpravo, ak vlak pôjde vpravo, guľa sa bude pohybovať doľava.
Newtonov zákon sily v tvare (2.41) určuje „reálnu” silu pôsobiacu na hmotný bod (teleso),
spôsobenú iným hmotným bodom (telesom).
Z predchádzajúcich úvah vyplýva, že všetky inerciálne súradnicové sústavy sú
ekvivalentné. Táto skutočnosť je vyjadrená v Galileovom princípe relativity: Základné zákony
fyziky sa rovnako formulujú pre všetky súradnicové sústavy, ktoré sa pohybujú navzájom
konštantnými rýchlosťami. Inými slovami: Nijakými fyzikálnymi pokusmi sa nemožno
presvedčiť, či je súradnicová sústava v pokoji alebo v rovnomernom priamočiarom pohybe.
2.8 Pohyb hmotného bodu v neinerciálnej súradnicovej sústave
Zákon sily môžeme chápať aj tak, že každému zrýchleniu a odpovedá sila aF m , takže
zrýchleniu a, ktoré nameria pozorovateľ v neinerciálnej súradnicovej sústave zodpovedá sila
rαrωωωaaaF mmmmmm v20 (2.43)
alebo
FFFFFF odC0 (2.44)
kde a je zrýchlenie vzhľadom na inerciálnu sústavu,
a0 – zrýchlenie začiatku neinerciálnej sústavy,
– uhlová rýchlosť, s ktorou rotuje neinerciálna sústava,
– uhlové zrýchlenie neinerciálnej sústavy,
F – sila pôsobiaca na hmotný bod v neinerciálnej sústave,
aF m – reálna sila,
00 aF m – sila súvisiaca so zrýchlením začiatku neinerciálnej sústavy,
v ωF m2C – Coriolisova sila,
rωωF mod – odstredivá sila,
rαF m – sila súvisiaca so zmenou uhlovej rýchlosti otáčania neinerciálnej sústavy.

41
Príklad 2.10. Vo výťahu sa vezie človek hmotnosti 70 kg. Aká je jeho zdanlivá tiaž,
keď sa výťah rozbieha: a) smerom nahor so zrýchlením 2s . m ,50 , b) smerom dole so
zrýchlením ?s . m ,60 2
Riešenie: Súradnicová sústava spojená s výťahom je neinerciálna súradnicová sústava
pohybujúca sa vzhľadom na inerciálnu (spojenú s budovou) so zrýchlením .0a Na človeka
pôsobí preto sila (pozri vzťah (2.44))
00 agFFF mm
čo je zdanlivá tiaž človeka.
a) Pri pohybe nahor vektory g a 0a majú opačné smery, preto zdanlivá tiaž je
N 722s . m 5,09,81 . kg 70 200hzh agmmamgFF
b) Pri pohybe nadol g a 0a majú rovnaké smery, preto
N 645s . m 6,081,9 . kg 70 200dzd agmmamgFF
2.9 Hybnosť, impulz sily, zákon zachovania hybnosti
Pomocou Newtonových zákonov dynamiky by sme mohli principiálne vyriešiť každý
konkrétny problém týkajúci sa pohybu. Niekedy však riešenie problémov pomocou nich je
komplikované, a preto budeme v ďalšom formulovať niekoľko zákonov, pomocou ktorých sa
dajú mnohé problémy dynamiky riešiť elegantnejšie a rýchlejšie. Na tento účel si budeme
definovať dve veličiny – hybnosť a impulz sily.
Hybnosť hmotného bodu je definovaná súčinom jeho hmotnosti m a rýchlosti v
vmp (2.45)
Impulz sily (časový účinok sily) je definovaný vzťahom
t
t
d
0
FI (2.46)
Odvodíme súvis medzi impulzom sily pôsobiacej na hmotný bod a medzi hybnosťou
hmotného bodu
00
000 0
d d d
dd d ppaFI
v
v
vvvv
mmmtt
mtmt
ttt
(2.47)
Teda, impulz sily pôsobiacej na voľný hmotný bod sa rovná zmene hybnosti hmotného bodu.
Uvažujme zrážku dvoch hmotných bodov (obr. 2.17). V okamihu zrážky, ktorá trvá dobu
,dt pôsobia na seba hmotné body podľa zákona akcie a reakcie silami
2112 FF

42
Sily F12 a F21 môžeme vyjadriť aj pomocou hybnosti, lebo
tt
m
tmm
d
d
d
d
d
d paF
vv (2.48)
Teda
tt d
da
d
d 121
212
pF
pF
Potom zákon akcie a reakcie môžeme napísať v tvare
0d
d
d
d 21 tt
pp
z ktorého vyplýva, že
.21 konšt pp (2.49)
čo môžeme slovne interpretovať takto: V izolovanej sústave hmotných bodov ich celková
hybnosť zostáva konštantná. Izolovaná sústava hmotných bodov (telies) je taká sústava
hmotných bodov, na ktoré nepôsobia žiadne vonkajšie sily (t. j. žiadne objekty mimo sústavy)
alebo výslednica vonkajších síl je nulová.
Príklad 2.10. Hmotný bod s hmotnosťou 10 g sa pohybuje po kružnici s polomerom
cm, 10 s periódou 2 s. Treba zistiť zmenu jeho hybnosti (veľkosť zmeny aj smer) po uplynutí
štvrtiny periódy.
Riešenie: Treba si uvedomiť, že hybnosť je vektorová veličina (obr. 2.18a). Zmena
hybnosti je
00Δ vv mm ppp
čo je znázornené na obr. 2.18b. Veľkosť zmeny hybnosti, keď si uvedomíme, že ,0vv je
rovná
T
mr
T
rmmmmmp 8π
π2 2 22Δ 0
20
20
2 vvvv
Číselne
13
2
s . m . kg 10444
s 2
m 0,1 . kg 10. 8Δ
.,
p
Vektor zmeny hybnosti
smeruje do stredu kružnice, lebo
pri rovnomernom pohybe hmot-
ného bodu po kružnici pôsobí na
hmotný bod len sila smerujúca
do stredu kružnice – dostredivá
sila (pozri vzťah (2.47)).
Obr. 2.17. Celková hybnosť izolovanej
sústavy hmotných bodov sa zachováva.
Obr. 2.18. Zmena hybnosti hmotného bodu pri jeho rovnomer-
nom pohybe po kružnici.
m
mp
p1
1
1
2
22
S
r
0
0
p
p
p
mp=
m 00p =
a) b)

43
Príklad 2.11. Molekula argónu, letiaca rýchlosťou
,s . m 500 1 pružne narazí na stenu nádoby. Smer rýchlosti
molekuly zviera s normálou k stene uhol 45°. Treba vypočítať
impulz sily, ktorý udelí stena molekule (obr. 2.19). Hmotnosť
molekuly argónu je kg. 6,63.10 26
Riešenie: Impulz sily, ktorý udelí stena molekule je rovný
zmene jej hybnosti
0vv mm I
Smer impulzu sily je zrejmý z obr. 2.19 a keďže ide o pružný
náraz, platí 00 vmmm vv . Veľkosť impulzu sily potom
možno vypočítať takto
s . N ,69.10445 cos s . m 500 . kg 6,63.10 . 2cos2 23126 vmI
Keby molekula dopadla na stenu kolmo, uhol 0 a impulz sily, ktorý udelí stena
molekule by bol rovný 02 vmI .
2.10 Energia, práca, výkon, účinnosť
Častokrát budeme v našom kurze spomínať slovo energia. Mali by sme presne vymedziť
čo to je energia. Bohužiaľ presná odpoveď neexistuje, súčasná fyzika vlastne nevie čo je to
energia. Pokúsme sa aspoň objasniť jej zmysel. Energia je veličina, ktorá zachováva svoju
hodnotu pri akýchkoľvek dejoch, čo sa vyjadruje zákonom zachovania energie. Tento zákon
vyjadruje skutočnosť, že po skončení pozorovania
„izolovanej” časti prírody prechádzajúcej rôznymi
premenami, dostaneme výpočtom to isté číslo ako pred
premenami. Izolovaný systém značí, že energia do
systému nemôže len „prichádzať” alebo len
„odchádzať”. Ak nejaká energia do systému príde,
musíme dať pozor, aby rovnaké množstvo odišlo. Teda
energia uzavretého systému je v čase konštantná.
Energia vyjadrená vzťahmi má mnoho foriem:
gravitačná, kinetická, potenciálna, tepelná, energia
pružnosti, elektrická, chemická, radiačná, jadrová, atď.
Častokrát energiu definujeme ako schopnosť telesa konať prácu. Pojem práca vznikol
skúsenosťou a v bežnej reči sa spája s dvomi inými veličinami, s dráhou a silou.
Mechanická práca W (dráhový účinok sily) je definovaná vzťahom
2
1
d
r
r
rFW (2.50)
kde F je sila, r – polohový vektor pôsobiska sily.
Obr. 2.19. Stena udelí mo-
lekule impulz sily rovný
zmene jej hybnosti.
Obr. 2.20. K práci konštantnej sily.
mm
m-m
I
00
0
.
m
F
r
0
rr1
2

44
Ak napr. .,konštF práca je
cos Δd 12
2
1
FsW rFrrFrF
r
r
(2.51)
kde s je posunutie pôsobiska sily a – uhol medzi vektorom F a vektorom r, (obr. 2.20).
Jednotka práce: J 1 s . m . kg 1m 1 . N 1 2 (joule – číta sa džaul).
Výkon je práca vykonaná za jednotku času
t
WP
d
d (2.52)
Výkon je teda mierou intenzity konania práce. Vzťahom (2.52) je definovaný okamžitý výkon.
Priemerný výkon je definovaný vzťahom
t
WP
Δ
Δ (2.53)
kde W je práca vykonaná za dobu t.
Ak do vzťahu (2.52) dosadíme diferenciál práce rF dd W , dostaneme ďalší užitočný
vzťah pre určenie výkonu
v
FrF
tt
WP
d
d
d
d (2.54)
Jednotka výkonu: 1 1 J 1 s W (watt) .
Účinnosť stroja alebo zariadenia je definovaná vzťahom
pP
P (2.55)
kde P je výkon stroja a Pp príkon (výkon dodávaný do stroja). Účinnosť sa udáva buď ako
desatinné číslo (je vždy menšia ako jeden), alebo v percentách (ak vynásobíme desatinné číslo
stoma).
Príklad 2.12. Plne naložený výťah sa pohybuje smerom nahor s konštantnou
rýchlosťou ., 1s . m 60 Aká sila napína lano, na ktorom je zavesený výťah, keď výkon
elektromotora navíjajúceho lano je 24 kW?
Riešenie: Sila tF pôsobiaca na lano výťahu je paralelná so smerom rýchlosti v. Potom
platí, že
vvt
tt FFP cosvF
Z tohto vzťahu potom hľadaná sila je
kN 04N 1040s . m 0,6
W10 . 24 3
1
3
t
.P
Fv
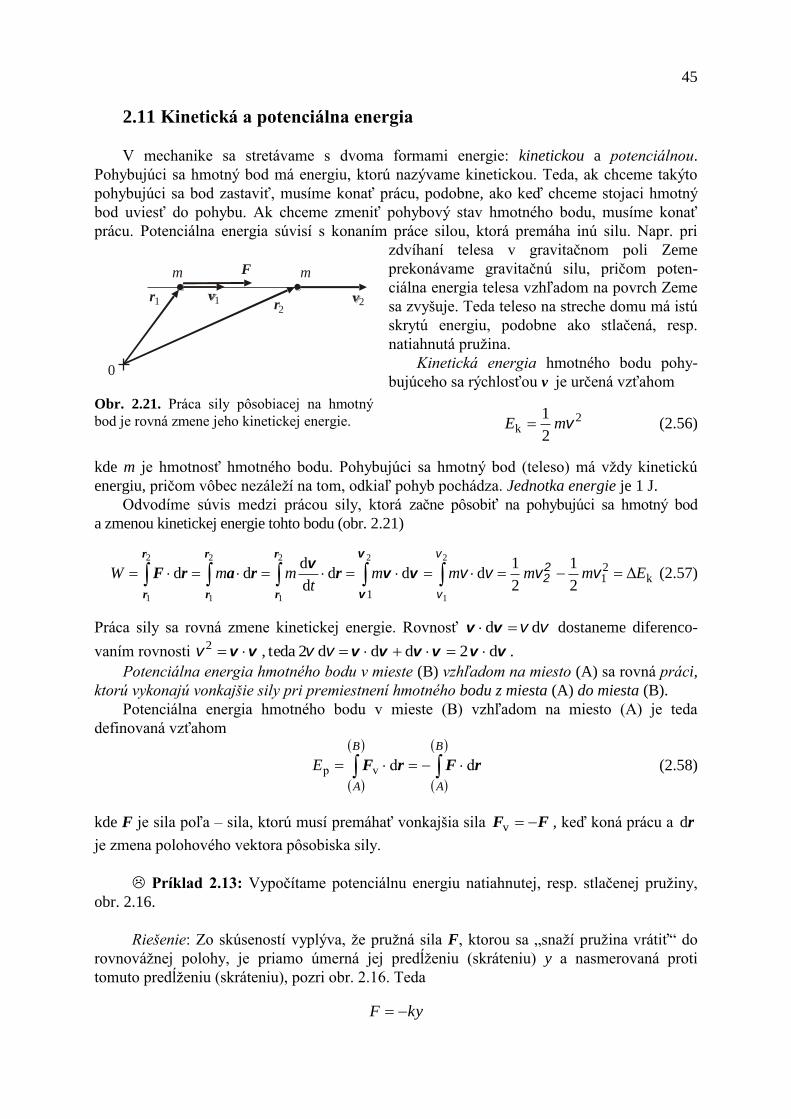
45
2.11 Kinetická a potenciálna energia
V mechanike sa stretávame s dvoma formami energie: kinetickou a potenciálnou.
Pohybujúci sa hmotný bod má energiu, ktorú nazývame kinetickou. Teda, ak chceme takýto
pohybujúci sa bod zastaviť, musíme konať prácu, podobne, ako keď chceme stojaci hmotný
bod uviesť do pohybu. Ak chceme zmeniť pohybový stav hmotného bodu, musíme konať
prácu. Potenciálna energia súvisí s konaním práce silou, ktorá premáha inú silu. Napr. pri
zdvíhaní telesa v gravitačnom poli Zeme
prekonávame gravitačnú silu, pričom poten-
ciálna energia telesa vzhľadom na povrch Zeme
sa zvyšuje. Teda teleso na streche domu má istú
skrytú energiu, podobne ako stlačená, resp.
natiahnutá pružina.
Kinetická energia hmotného bodu pohy-
bujúceho sa rýchlosťou v je určená vzťahom
2k
2
1vmE (2.56)
kde m je hmotnosť hmotného bodu. Pohybujúci sa hmotný bod (teleso) má vždy kinetickú
energiu, pričom vôbec nezáleží na tom, odkiaľ pohyb pochádza. Jednotka energie je 1 J.
Odvodíme súvis medzi prácou sily, ktorá začne pôsobiť na pohybujúci sa hmotný bod
a zmenou kinetickej energie tohto bodu (obr. 2.21)
k21
1
Δ 2
1
2
1ddd
d
ddd
2
1
22
1
2
1
2
1
Emmmmt
mmW vvvv 22
v
v
v
v
vvv
rrarF
r
r
r
r
r
r
(2.57)
Práca sily sa rovná zmene kinetickej energie. Rovnosť vv d d vv dostaneme diferenco-
vaním rovnosti vvvvvvvv d 2ddd2teda , 2 v vv .
Potenciálna energia hmotného bodu v mieste (B) vzhľadom na miesto (A) sa rovná práci,
ktorú vykonajú vonkajšie sily pri premiestnení hmotného bodu z miesta (A) do miesta (B).
Potenciálna energia hmotného bodu v mieste (B) vzhľadom na miesto (A) je teda
definovaná vzťahom
B
A
B
A
E rFrF ddvp (2.58)
kde F je sila poľa – sila, ktorú musí premáhať vonkajšia sila FF v , keď koná prácu a rd
je zmena polohového vektora pôsobiska sily.
Príklad 2.13: Vypočítame potenciálnu energiu natiahnutej, resp. stlačenej pružiny,
obr. 2.16.
Riešenie: Zo skúseností vyplýva, že pružná sila F, ktorou sa „snaží pružina vrátiť“ do
rovnovážnej polohy, je priamo úmerná jej predĺženiu (skráteniu) y a nasmerovaná proti
tomuto predĺženiu (skráteniu), pozri obr. 2.16. Teda
kyF
Obr. 2.21. Práca sily pôsobiacej na hmotný
bod je rovná zmene jeho kinetickej energie.
m mF
0
rr1 12
2

46
Potenciálnu energiu natiahnutej pružiny vypočítame podľa vzťahu (2.58)
2
000
p2
1d d d kyyykyykyFE
yyy
Keď integrál vo vzťahu (2.57) závisí len od začiatočnej polohy (A) a konečnej polohy
(B), hovoríme o poli konzervatívnych síl alebo o potenciálovom poli. V takomto prípade platí
tiež, že integrál po uzavretej krivke sa rovná nule:
0d s
rF Potenciálové pole je teda také,
v ktorom je jednoznačne definovaná potenciálna energia vzťahom (2.58).
V takomto prípade možno zo vzťahu (2.57) odvodiť vzťah pre silu v ľubovoľnom bode
poľa
pdd E rF
čo možno napísať tiež ako
rkjikjirF dddddddd ppppppp
Ezyx
z
E
y
E
x
Ez
z
Ey
y
Ex
x
E
Z posledného vzťahu vyplýva, že
pEF (2.59)
čo možno v zložkovom tvare vyjadriť ako
z
EF
y
EF
x
EF zyx
ppp ; ;
2.12 Gravitačné pole
2.12.1 Úvod
Pohyb nebeských telies pútal pozornosť ľudskej mysle už od dôb najstarších civilizácií.
Veľmi zaujímavým a dôležitým z hľadiska porozumenia nášho sveta (vesmíru) je proces
vývoja poznania planetárneho pohybu.
Starí Gréci považovali Zem za centrum vesmíru. Domnievali sa, že Zem je jeho
geometrickým stredom a že všetky „nebeské telesá“ sa pohybujú okolo Zeme. Telesá známe
v tom čase boli umiestnené vzhľadom na Zem podľa ich vzdialeností od nej. Prvým bol
Mesiac, potom nasledovali Merkúr, Venuša, zaujímavé – potom Slnko, ďalej Mars, Jupiter a
Saturn. Ostatné nebeské telesá boli rozmiestnené za vonkajšou sférou.
Táto prvá hypotéza o pohybe nebeských telies predpokladala, že sa pohybujú po
koncentrických kružniciach, v ktorých strede sa nachádza Zem (tzv. geocentrický model).
Tento predpoklad však nebol v súlade s pozorovaným pohybom planét. Preto v druhom
storočí nášho letopočtu, aby odstránil tento nesúlad, navrhol Ptolemaios geocentrický model,
podľa ktorého sa planéty pohybujú po malých kružniciach – epicykloch a stredy epicyklov sa
zasa pohybujú po väčších kružniciach koncentrických so Zemou, nazývanými deferenty.
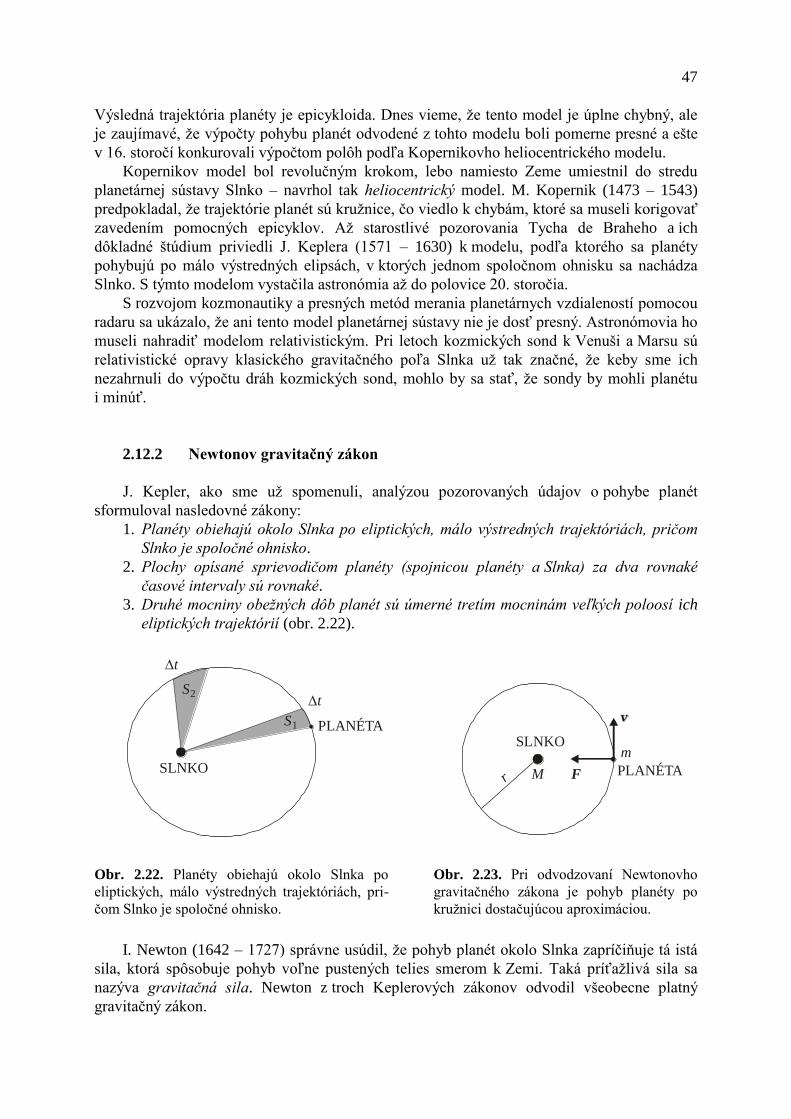
47
Výsledná trajektória planéty je epicykloida. Dnes vieme, že tento model je úplne chybný, ale
je zaujímavé, že výpočty pohybu planét odvodené z tohto modelu boli pomerne presné a ešte
v 16. storočí konkurovali výpočtom polôh podľa Kopernikovho heliocentrického modelu.
Kopernikov model bol revolučným krokom, lebo namiesto Zeme umiestnil do stredu
planetárnej sústavy Slnko – navrhol tak heliocentrický model. M. Kopernik (1473 – 1543)
predpokladal, že trajektórie planét sú kružnice, čo viedlo k chybám, ktoré sa museli korigovať
zavedením pomocných epicyklov. Až starostlivé pozorovania Tycha de Braheho a ich
dôkladné štúdium priviedli J. Keplera (1571 – 1630) k modelu, podľa ktorého sa planéty
pohybujú po málo výstredných elipsách, v ktorých jednom spoločnom ohnisku sa nachádza
Slnko. S týmto modelom vystačila astronómia až do polovice 20. storočia.
S rozvojom kozmonautiky a presných metód merania planetárnych vzdialeností pomocou
radaru sa ukázalo, že ani tento model planetárnej sústavy nie je dosť presný. Astronómovia ho
museli nahradiť modelom relativistickým. Pri letoch kozmických sond k Venuši a Marsu sú
relativistické opravy klasického gravitačného poľa Slnka už tak značné, že keby sme ich
nezahrnuli do výpočtu dráh kozmických sond, mohlo by sa stať, že sondy by mohli planétu
i minúť.
2.12.2 Newtonov gravitačný zákon
J. Kepler, ako sme už spomenuli, analýzou pozorovaných údajov o pohybe planét
sformuloval nasledovné zákony:
1. Planéty obiehajú okolo Slnka po eliptických, málo výstredných trajektóriách, pričom
Slnko je spoločné ohnisko.
2. Plochy opísané sprievodičom planéty (spojnicou planéty a Slnka) za dva rovnaké
časové intervaly sú rovnaké.
3. Druhé mocniny obežných dôb planét sú úmerné tretím mocninám veľkých poloosí ich
eliptických trajektórií (obr. 2.22).
I. Newton (1642 – 1727) správne usúdil, že pohyb planét okolo Slnka zapríčiňuje tá istá
sila, ktorá spôsobuje pohyb voľne pustených telies smerom k Zemi. Taká príťažlivá sila sa
nazýva gravitačná sila. Newton z troch Keplerových zákonov odvodil všeobecne platný
gravitačný zákon.
Obr. 2.22. Planéty obiehajú okolo Slnka po
eliptických, málo výstredných trajektóriách, pri-
čom Slnko je spoločné ohnisko.
Obr. 2.23. Pri odvodzovaní Newtonovho
gravitačného zákona je pohyb planéty po
kružnici dostačujúcou aproximáciou.
SLNKO
PLANÉTAS
S
1
2t
t
SLNKO
PLANÉTAr FM
m

48
Videli sme, že z pohybových rovníc môžeme určiť trajektóriu, keď poznáme pôsobiacu
silu (napr. šikmý vrh). Ale zo známej trajektórie možno odvodiť aj silu, ktorá skúmaný pohyb
zapríčiňuje. Newton použil práve túto druhú možnosť.
Keplerov 1. zákon tvrdí, že orbitála planéty je elipsa. Špeciálnym prípadom elipsy je
kružnica, pri ktorej obidve ohniská splývajú so stredom. Toto priblíženie pre trajektóriu planét
je možné použiť, lebo výstrednosť elíps, po ktorých sa planéty pohybujú je malá. Keď sa teda
planéta pohybuje rovnomerným pohybom po kružnici, jediným zrýchlením je dostredivé
zrýchlenie spôsobené príťažlivou silou smerujúcou do stredu kružnice, v ktorom sa nachádza
Slnko (obr. 2.23). Veľkosť tejto sily sa dá vyjadriť podľa 2. Newtonovho zákona – zákona sily
nasledujúco
rmmaF
2
d
v
V tomto vzťahu m je hmotnosť planéty, v – obežná rýchlosť planéty okolo Slnka a r – vzdia-
lenosť planéty od Slnka.
Pre dostredivé zrýchlenie použitím 3. Keplerovho zákona ( 32 krT ) dostaneme vyjadre-
nie
22
2
3
2222
d
11π41π41π2
rC
rkrkr
r
rT
r
ra
v
a pre dostredivú (gravitačnú) silu, ktorou Slnko pôsobí na planétu
2r
mCF (2.60)
Konštanta C vystupujúca vo vzťahu (2.60) závisí len od vlastností Slnka.
Podľa princípu akcie a reakcie však musí pôsobiť aj planéta na Slnko silou rovnako
veľkou, teda
2r
MCF (2.61)
kde M je hmotnosť Slnka a konštanta C v tomto prípade závisí len od vlastností planéty.
Porovnaním vzťahov (2.60) a (2.61) dostaneme, že
MCCm
resp.
Gm
C
M
C
Potom GMC a mGC . Keď dosadíme vzťah GMC do vzťahu (2.60) alebo vzťah
mGC do vzťahu (2.61) dostaneme pre veľkosť príťažlivej sily vzťah
2r
MmGF (2.62)
Tento vzťah zovšeobecnil Newton pre akékoľvek telesá (ktoré možno považovať za
hmotné body) s hmotnosťami m a m : Sila, ktorou sa priťahujú dve telesá s hmotnosťami m a

49
m je priamo úmerná súčinu obidvoch hmotností a nepriamo úmerná druhej mocnine ich
vzdialenosti r
2r
mmGF
(2.63)
Konštanta G sa nazýva gravitačná konštanta. Jej hodnota
je (údaj z r. 2002)
-2-1311 s kg m 100010067426 .,,G
Rovnica (2.63) platí, ako sme už spomenuli, presne len
pre hmotné body, t. zn. pre telesá, ktorých vzájomná
vzdialenosť je podstatne väčšia ako sú ich rozmery a pre
homogénne gule, pri ktorých za r dosadzujeme vzdialenosť
ich stredov.
Keďže sila je vektorová veličina, upravíme vzťah (2.63) do vektorového tvaru. Teda sila,
ktorou hmotný bod s hmotnosťou m priťahuje hmotný bod s hmotnosťou m sa dá vyjadriť
nasledujúco
rF3r
mmG
(2.64)
V tomto vzťahu r je polohový vektor hmotného
bodu s hmotnosťou m vzhľadom na hmotný bod
s hmotnosťou m, r je jeho absolútna hodnota
(vzdialenosť hmotných bodov), pozri obr. 2.24.
Gravitačnú konštantu nemožno vypočítať
z výsledkov astronomických pozorovaní. Z nich sa
dajú určiť len kinematické veličiny. Gravitačná
konštanta sa preto musí určiť vhodným laboratórnym
meraním. Ako prvý ju zmeral r. 1798 H. Cavendish
(1731 – 1810) pomocou torzných váh (obr. 2.25): Na
dlhom, jemnom a pružnom vlákne je upevnená
ľahká tyčinka, na ktorej koncoch sú umiestnené dve
rovnaké malé olovené guľôčky A a B s hmotnosťou
m. Ďalšie dve gule C a D, znova s rovnakou, ale
podstatne väčšou hmotnosťou mM , boli
umiestnené v blízkosti gúľ A a B tak, ako je
znázornené na obr. 2.25. Gravitačná sila pôsobiaca
medzi guľami, skrúti vlákno. Keďže sily pôsobiace
medzi guľami sú malé, použije sa na zistenie
pootočenia vlákna optické zariadenie. Potom sa gule C a D umiestnia do polôh, ktoré sú
vyznačené čiarkovanými krúžkami a znova sa určí uhol pootočenia vlákna. Z nameraných
údajov sa dá zistiť sila pôsobiaca medzi guľami a pomocou vzťahu MmFrG 2 sa vypočíta
gravitačná konštanta.
Cavendish opísal svoj experiment ako „váženie Zeme“. Skutočne, ak poznáme gravitačnú
konštantu, hmotnosť Zeme vieme vypočítať, pozri vzťah (2.62). Takýmto spôsobom možno
nájsť aj hmotnosť iných planét a tiež aj Slnka.
Obr. 2.24. Gravitačná sila je prí-
ťažlivá sila.
Obr. 2.25. Schematické znázornenie
Cavendishovho experimentu na určenie
gravitačnej konštanty.
m
m
x
y
z
r
F
A
B
Zrkadlo
Stupnica
Zdroj svetla
C
D
m
m
M
M
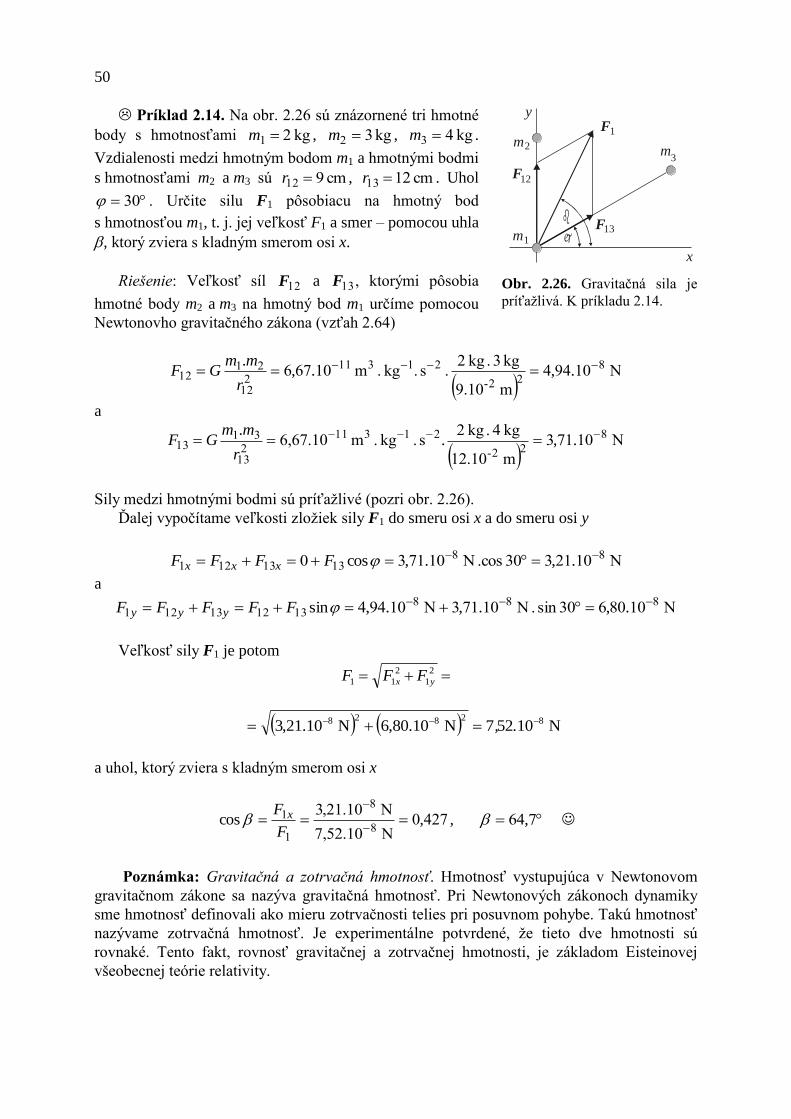
50
Príklad 2.14. Na obr. 2.26 sú znázornené tri hmotné
body s hmotnosťami kg 21 m , kg 32 m , kg 43 m .
Vzdialenosti medzi hmotným bodom m1 a hmotnými bodmi
s hmotnosťami m2 a m3 sú cm 912 r , cm 1213 r . Uhol
30 . Určite silu F1 pôsobiacu na hmotný bod
s hmotnosťou m1, t. j. jej veľkosť F1 a smer – pomocou uhla
, ktorý zviera s kladným smerom osi x.
Riešenie: Veľkosť síl 12F a 13F , ktorými pôsobia
hmotné body m2 a m3 na hmotný bod m1 určíme pomocou
Newtonovho gravitačného zákona (vzťah 2.64)
N 10944
m 9.10
kg 3 . kg 2. s .kg . m 10676 8
22-
21311
212
2112
.,.,.
r
mmGF
a
N 10713
m 12.10
kg 4 . kg 2s . kg . m 6,67.10 8
22-
21311
213
3113
.,..
r
mmGF
Sily medzi hmotnými bodmi sú príťažlivé (pozri obr. 2.26).
Ďalej vypočítame veľkosti zložiek sily F1 do smeru osi x a do smeru osi y
N 1021330 .cosN 107130 881313121
.,.,cosFFFF xxx
a
N 1080630 sin .N 10713N 10944 888131213121
.,.,.,sinFFFFF yyy
Veľkosť sily F1 je potom
2
1
2
11 yx FFF
N 10527N ,80.106N ,21.103 82828 .,
a uhol, ktorý zviera s kladným smerom osi x
4270N 7,52.10
N ,21.1038
8
1
1 ,cos
F
F x , 764,
Poznámka: Gravitačná a zotrvačná hmotnosť. Hmotnosť vystupujúca v Newtonovom
gravitačnom zákone sa nazýva gravitačná hmotnosť. Pri Newtonových zákonoch dynamiky
sme hmotnosť definovali ako mieru zotrvačnosti telies pri posuvnom pohybe. Takú hmotnosť
nazývame zotrvačná hmotnosť. Je experimentálne potvrdené, že tieto dve hmotnosti sú
rovnaké. Tento fakt, rovnosť gravitačnej a zotrvačnej hmotnosti, je základom Eisteinovej
všeobecnej teórie relativity.
Obr. 2.26. Gravitačná sila je
príťažlivá. K príkladu 2.14.
m
m
m
x
y
F
F
F
12
13
1
1
23
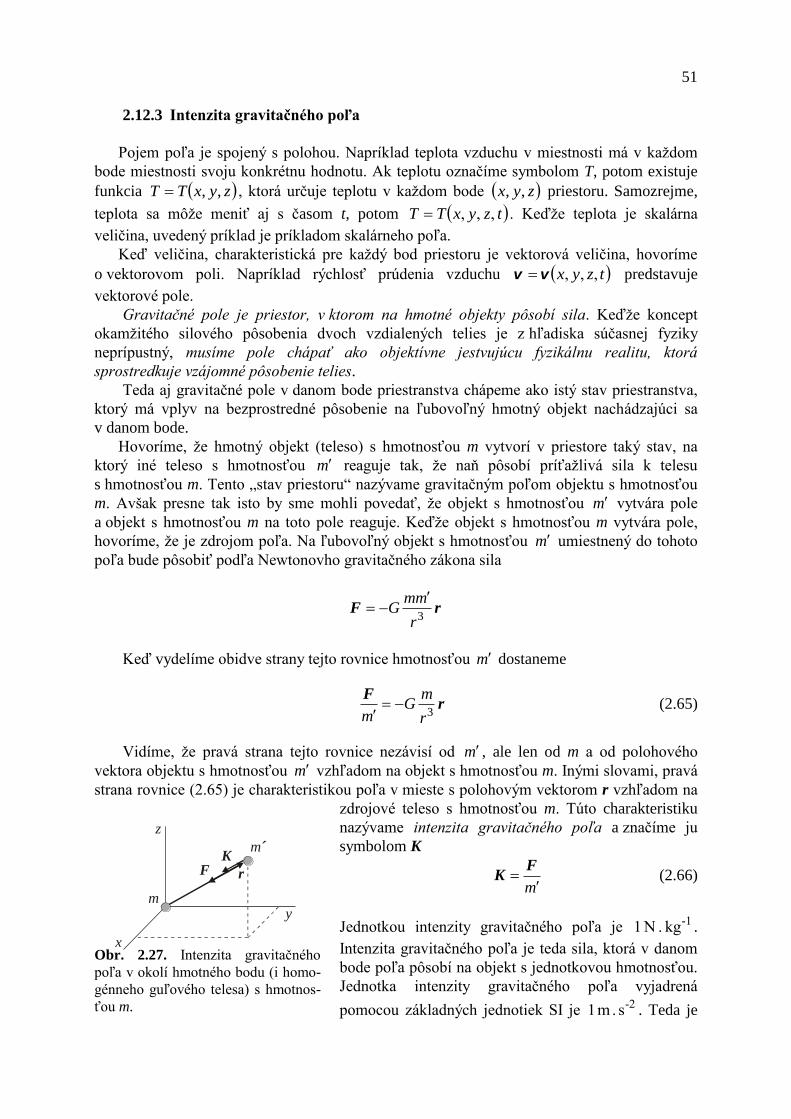
51
2.12.3 Intenzita gravitačného poľa
Pojem poľa je spojený s polohou. Napríklad teplota vzduchu v miestnosti má v každom
bode miestnosti svoju konkrétnu hodnotu. Ak teplotu označíme symbolom T, potom existuje
funkcia zyxTT ,, , ktorá určuje teplotu v každom bode zyx ,, priestoru. Samozrejme,
teplota sa môže meniť aj s časom t, potom tzyxTT , ,, . Keďže teplota je skalárna
veličina, uvedený príklad je príkladom skalárneho poľa.
Keď veličina, charakteristická pre každý bod priestoru je vektorová veličina, hovoríme
o vektorovom poli. Napríklad rýchlosť prúdenia vzduchu tzyx ,,,vv predstavuje
vektorové pole.
Gravitačné pole je priestor, v ktorom na hmotné objekty pôsobí sila. Keďže koncept
okamžitého silového pôsobenia dvoch vzdialených telies je z hľadiska súčasnej fyziky
neprípustný, musíme pole chápať ako objektívne jestvujúcu fyzikálnu realitu, ktorá
sprostredkuje vzájomné pôsobenie telies.
Teda aj gravitačné pole v danom bode priestranstva chápeme ako istý stav priestranstva,
ktorý má vplyv na bezprostredné pôsobenie na ľubovoľný hmotný objekt nachádzajúci sa
v danom bode.
Hovoríme, že hmotný objekt (teleso) s hmotnosťou m vytvorí v priestore taký stav, na
ktorý iné teleso s hmotnosťou m reaguje tak, že naň pôsobí príťažlivá sila k telesu
s hmotnosťou m. Tento „stav priestoru“ nazývame gravitačným poľom objektu s hmotnosťou
m. Avšak presne tak isto by sme mohli povedať, že objekt s hmotnosťou m vytvára pole
a objekt s hmotnosťou m na toto pole reaguje. Keďže objekt s hmotnosťou m vytvára pole,
hovoríme, že je zdrojom poľa. Na ľubovoľný objekt s hmotnosťou m umiestnený do tohoto
poľa bude pôsobiť podľa Newtonovho gravitačného zákona sila
rF3r
mmG
Keď vydelíme obidve strany tejto rovnice hmotnosťou m dostaneme
rF
3r
mG
m
(2.65)
Vidíme, že pravá strana tejto rovnice nezávisí od m , ale len od m a od polohového
vektora objektu s hmotnosťou m vzhľadom na objekt s hmotnosťou m. Inými slovami, pravá
strana rovnice (2.65) je charakteristikou poľa v mieste s polohovým vektorom r vzhľadom na
zdrojové teleso s hmotnosťou m. Túto charakteristiku
nazývame intenzita gravitačného poľa a značíme ju
symbolom K
m
FK (2.66)
Jednotkou intenzity gravitačného poľa je -1kg .N 1 .
Intenzita gravitačného poľa je teda sila, ktorá v danom
bode poľa pôsobí na objekt s jednotkovou hmotnosťou.
Jednotka intenzity gravitačného poľa vyjadrená
pomocou základných jednotiek SI je -2s . m 1 . Teda je
Obr. 2.27. Intenzita gravitačného
poľa v okolí hmotného bodu (i homo-
génneho guľového telesa) s hmotnos-
ťou m.
m
m´
x
y
z
rFK

52
totožná s jednotkou zrýchlenia. Intenzita gravitačného poľa K v danom mieste je číselne aj
rozmerovo totožná s gravitačným zrýchlením ga v tom istom mieste. Platí: gaKF mm .
Vzťahom (2.66) je vlastne určená intenzita gravitačného poľa v okolí hmotného bodu
(i homogénneho guľového telesa) s hmotnosťou m (obr. 2.27)
rK3r
mG (2.67)
Intenzita gravitačného poľa v okolí viacerých hmotných bodov s hmotnosťami m1, m2, …,
mi, …, mn je daná princípom superpozície (vektorovým súčtom jednotlivých intenzít,
obr. 2.28a)
i
n
i i
in
i
ir
mG rKK
1
31
(2.68)
Intenzita v okolí telesa s objemovou hustotou Vm dd sa určí podľa vzťahu
rrKK
Vmr
VG
r
m33
d
d Gd
(2.69)
kde dV je objemový element telesa (obr. 2.28b).
Znázorňovanie gravitačného poľa. Siločiarou v gravitačnom poli nazývame orientovanú
čiaru, ktorá v každom svojom bode je súhlasne rovnobežná so smerom intenzity gravitačného
Obr. 2.28. K výpočtu intenzity gravitačného poľa: a) v okolí viacerých
hmotných bodov, b) v okolí telesa s objemovou hustotou .
Obr. 2.29. Siločiary gravitačného poľa: a) hmotného bodu, b) dvoch rovnakých
hmotných bodov, c) homogénneho.
r
K
dV
a) b)
m
m
m
m
m
r
1 1
2
2
i
i
i
n
n
j
j
K
K
K
KK
K
KK
K
a) b)
mm m
c)

53
poľa v tomto bode. Pomocou siločiar možno „zviditeľniť“ gravitačné pole. Príklady
znázornenia gravitačného poľa sú na obr. 2.29. Rozloženie siločiar reprezentuje veľkosť poľa.
V oblasti, kde sú siločiary bližšie pri sebe (hustejšie), je intenzita gravitačného poľa väčšia
ako tam, kde sú siločiary ďalej od seba (redšie). Homogénne pole je znázorňované
siločiarami, ktoré sú rovnako vzdialené, priame a paralelné.
2.12.4 Gravitačná potenciálna energia. Gravitačný potenciál
Ako sme už skôr uviedli, potenciálna energia súvisí s konaním práce silou, ktorá premáha
inú silu. Teda, keď dvíhame teleso v gravitačnom poli Zeme prekonávame gravitačnú silu,
pričom potenciálna energia telesa vzhľadom na povrch Zeme sa zvyšuje.
Počítajme teda prácu W, ktorú vykoná vonkajšia sila Fv (sila premáhajúca gravitačnú
silu), keď prenesie v gravitačnom poli vytvorenom hmotným bodom s hmotnosťou m, hmotný
bod s hmotnosťou m z miesta s polohovým vektorom r1 do miesta s polohovým vektorom r2
(obr. 2.30). Táto práca je rovná prírastku potenciálnej energie Ep hmotného bodu
s hmotnosťou m . Teda
1223vp1p2
11d
1ddd
2
1
2
1
2
1
2
1
rrmGmr
rmGm
r
mmGEEW
r
r
rrrFrF
r
r
r
r
r
r
(2.70)
Je zvykom zaviesť pojem absolútnej potenciálnej energie Ep. Táto je definovaná ako
práca vonkajších síl, ktorú vykonajú pri premiestnení hmotného bodu s hmotnosťou m
z referenčného miesta nachádzajúceho sa v nekonečne (vo vzťahu (2.70) 1r ) do miesta vo
vzdialenosti r od zdroja gravitačného poľa (hmotného bodu s hmotnosťou m)
r
mmGE
p (2.71)
Tento vzťah je vyjadrením vzájomnej potenciálnej energie
dvoch hmotných bodov, ktoré sú vo vzájomnej vzdialenosti r.
Podobne, ako sme zaviedli podiel gravitačnej sily a hmot-
nosti, je výhodné zaviesť aj podiel potenciálnej energie a hmot-
nosti telesa, ktorému táto energia prislúcha. Tento podiel sa
nazýva potenciál gravitačného poľa
m
E
pg (2.72)
Slovne možno potenciál gravitačného poľa v danom bode priestoru definovať ako prácu
vonkajších síl potrebnú na prenesenie hmotného objektu s jednotkovou hmotnosťou
z referenčného bodu do daného bodu.
Jednotkou potenciálu v sústave SI je -1kg .J 1 . Potenciál -1kg .J 1 má teda daný bod
v gravitačnom poli vtedy, keď na prenesenie jednotkovej hmotnosti (1 kg) z referenčného
bodu do daného bodu vykonajú vonkajšie sily prácu 1 J.
Obr. 2.30. K výpočtu práce
v gravitačnom poli.
r
r1
2
m
m´
(2)
(1)
54
Ak je gravitačné pole vytvorené sústavou hmotných bodov s hmotnosťami m1, m2, …, mn,
absolútny potenciál je daný vzťahom
n
i i
in
i
ir
mG
11
gg (2.73)
kde ri je vzdialenosť bodu, v ktorom potenciál určujeme, od hmotného bodu s hmotnosťou mi.
Ak je zdrojom gravitačného poľa teleso s objemovou hustotou , absolútny potenciál
určíme podľa vzťahu
Vr
VG
d d
gg
(2.74)
Odvodíme si ešte súvis medzi intenzitou a potenciálom gravitačného poľa. Podľa
definície možno potenciál vyjadriť ako
rKrF
ddp
gmm
E
teda
rK dg (2.75)
Malý prírastok potenciálu možno vyjadriť ako
rK dd
a ďalej
kjikji zyxKKKzz
yy
xx
zyx ddddddggg
Z posledného vzťahu vyplýva, že
zK;
yK;
xK zyx
ggg
a tiež
gg grad K (2.76)
intenzita gravitačného poľa sa rovná zápornému gradientu potenciálu.
Keďže potenciál zyx ,,gg je skalárna funkcia, pri určovaní charakteristík poľa
spravidla začíname práve s jeho výpočtom. Na výpočet intenzity gravitačného poľa
zyx ,,KK , ktorá je vektorovou funkciou, potom použijeme vzťah (2.76). Tento postup je
prezentovaný v nasledujúcom príklade 2.15.
Príklad 2.15. Vypočítajte absolútny potenciál a intenzitu, ktorú vybudí drôt
s hmotnosťou m a polomerom R ohnutý do tvaru kružnice v bode P ležiacom na osi kružnice
kolmej na jej rovinu (obr. 2.31).
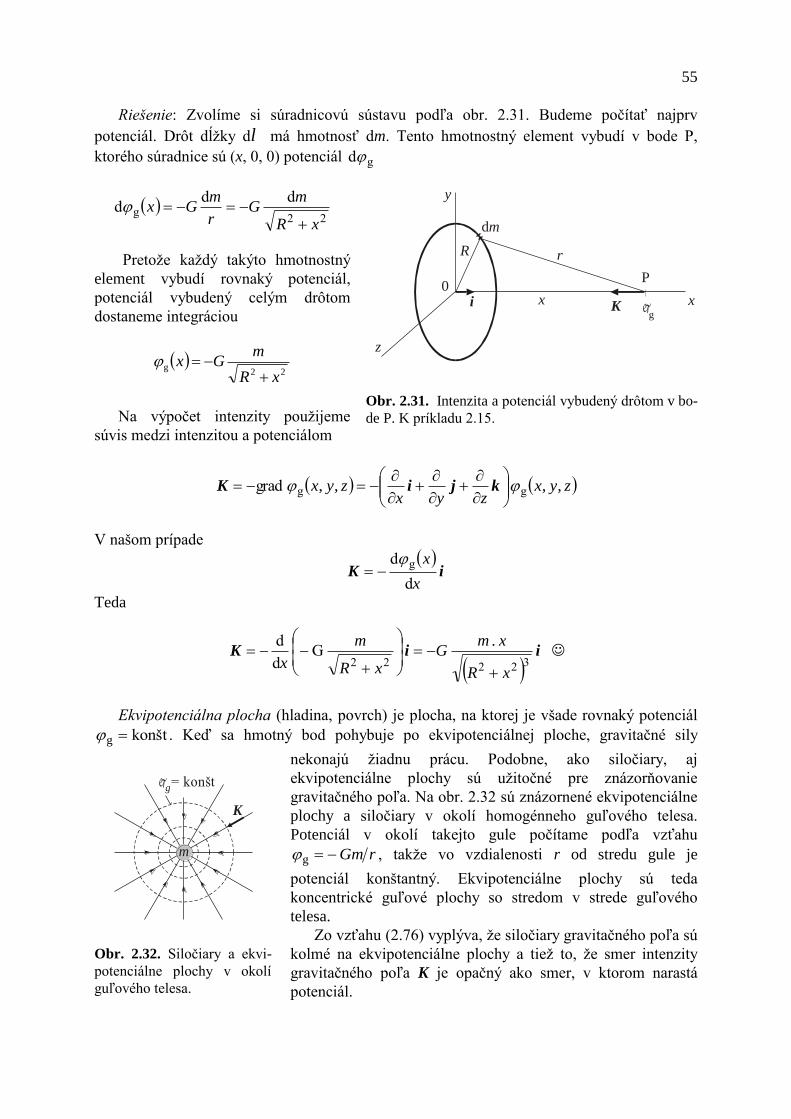
55
Riešenie: Zvolíme si súradnicovú sústavu podľa obr. 2.31. Budeme počítať najprv
potenciál. Drôt dĺžky dl má hmotnosť dm. Tento hmotnostný element vybudí v bode P,
ktorého súradnice sú (x, 0, 0) potenciál gd
22
g
d
dd
xR
mG
r
mGx
Pretože každý takýto hmotnostný
element vybudí rovnaký potenciál,
potenciál vybudený celým drôtom
dostaneme integráciou
22
g
xR
mGx
Na výpočet intenzity použijeme
súvis medzi intenzitou a potenciálom
zyxzyx
zyx ,,,, gg grad
kjiK
V našom prípade
iK
x
x
d
d g
Teda
iiK
32222
G
d
d
xR
xmG
xR
m
x
.
Ekvipotenciálna plocha (hladina, povrch) je plocha, na ktorej je všade rovnaký potenciál
konštg . Keď sa hmotný bod pohybuje po ekvipotenciálnej ploche, gravitačné sily
nekonajú žiadnu prácu. Podobne, ako siločiary, aj
ekvipotenciálne plochy sú užitočné pre znázorňovanie
gravitačného poľa. Na obr. 2.32 sú znázornené ekvipotenciálne
plochy a siločiary v okolí homogénneho guľového telesa.
Potenciál v okolí takejto gule počítame podľa vzťahu
rGmg , takže vo vzdialenosti r od stredu gule je
potenciál konštantný. Ekvipotenciálne plochy sú teda
koncentrické guľové plochy so stredom v strede guľového
telesa.
Zo vzťahu (2.76) vyplýva, že siločiary gravitačného poľa sú
kolmé na ekvipotenciálne plochy a tiež to, že smer intenzity
gravitačného poľa K je opačný ako smer, v ktorom narastá
potenciál.
Obr. 2.31. Intenzita a potenciál vybudený drôtom v bo-
de P. K príkladu 2.15.
Obr. 2.32. Siločiary a ekvi-
potenciálne plochy v okolí
guľového telesa.
K
= konšt
m
g
R
xx
y
z
r
P
dm
0i K
g

56
2.12.5 Gravitačné pole Zeme
Začneme z jednoduchej predstavy, že naša Zem je dokonalá guľa, že jej hustota sa mení
len radiálne od stredu a že nerotuje. V tomto prípade sa dá ukázať, že veľkosť sily pôsobiacej
na teleso s hmotnosťou m nachádzajúce sa mimo vnútra Zeme vo vzdialenosti r od jej stredu
sa dá vypočítať podľa vzťahu
2r
MmGF
kde M je hmotnosť Zeme.
Podľa 2. Newtonovho zákona však túto silu možno vyjadriť tiež ako
gmaF
kde ga je gravitačné zrýchlenie. Kombináciou dvoch predchádzajúcich vzťahov dostaneme
2gr
MGa (2.77)
V tabuľke 2.1 sú uvedené hodnoty ga pre rôzne výšky h nad zemským povrchom
vypočítané podľa vzťahu (2.77), kde ,hRr pričom R je polomer Zeme. Vo výške pri-
bližne 10 km lietajú dopravné lietadlá, vo výške 400 km raketoplány, vo výške 35700 km sú
umiestnené komunikačné (stacionárne) družice a 380000 km je vzdialenosť Mesiaca od Zeme.
Tabuľka 2.1. Zmena ga v závislosti od výšky
km
h
2
g
s . m
a
0 9,83
10 9,80
50 9,68
100 9,53
400i
8,70
35700j
0,225
380000k
0,0027
i Vzdialenosť v ktorej lietajú raketoplány
j Výška komunikačných satelitov
k Vzdialenosť Mesiaca
Samozrejme „reálna“ Zem sa od nášho ideálneho modelu odlišuje:
1. Zemská kôra nie je homogénna. Jej hustota sa mení od miesta k miestu, čo má vplyv
na hodnotu zrýchlenia voľne padajúcich telies. Precízne merania zrýchlenia voľného pádu
poskytujú cenné informácie pre geológov skúmajúcich zloženie zemskej kôry a tiež pri
vyhľadávaní nerastných a ropných ložísk. Odchýlky od dohodnutej referenčnej hodnoty sa
merajú v jednotkách miligaloch ( 25 s . m 10mgal 1 ).

57
2. Zem nie je guľa. Má približne tvar elipsoidu. Jej priemer v rovine rovníka je približne
o 42 km väčší ako priemer v rovine poludníka. Teda bod na póle je bližšie k hustému
zemskému jadru ako bod na rovníku. V dôsledku toho narastá zrýchlenie voľne padajúcich
telies smerom od rovníka k pólom.
3. Zem rotuje. Na obr. 2.33 je znázornená rotujúca Zem.
Súradnicová sústava spojená so Zemou je neinerciálna, takže
na teleso nachádzajúce sa na Zemi pôsobia fiktívne sily,
z ktorých najväčšia je odstredivá sila. Ak ostatné fiktívne sily
zanedbáme, na telesá nachádzajúce sa na zemskom povrchu
pôsobí sila ,F ktorá je výslednicou gravitačnej a odstredivej
sily (pozri časť 2.8)
odgodgod aaaaFFF mmm
Teda zrýchlenie voľne opadajúcich telies možno vyjadriť
ako
odg aag (2.78)
Odstredivé zrýchlenie možno vyjadriť ako rωωa mod , kde význam vektorov
rω a je zrejmý z obr. 2.33. Keďže veľkosť vektorového súčinu rω sa zmenšuje od
rovníka smerom k pólom, aj odstredivé zrýchlenie klesá v tom istom smere. Na póloch je
nulové. To je ďalší dôvod prečo sa zrýchlenie voľne padajúcich telies na povrchu Zeme mení.
Najmenšiu hodnotu má g na rovníku ( 2s . m 9,78 g ) a najväčšiu na póloch
( 2s . m 9,83 g ). Ako normálové zrýchlenie sa používa hodnota
22 s . m 9,81s . m 9,80665 g
Príklad 2.16. Vypočítame potenciálnu energiu telesa s hmotnosťou m vo výške h nad
zemským povrchom, pričom Rh , kde R je polomer Zeme, pomocou Newtonovho
gravitačného zákona.
Riešenie: Zem budeme považovať za homogénnu guľu,
ktorá má hmotnosť M. Potom sila, ktorou je teleso vo výške
h nad povrchom priťahované k Zemi je daná vzťahom
rF3r
MmG
kde r je polohový vektor telesa vzhľadom na stred Zeme a
hRr r (obr. 2.34).
Podľa definície, potenciálna energia telesa vo výške h
nad zemským povrchom je rovná práci vonkajšej sily
,v FF ktorú táto sila vykoná pri prenesení telesa zo
zemského povrchu do výšky h. Teda
Obr. 2.33. Na telesá na zem-
skom povrchu pôsobí okrem
gravitačnej sily aj odstredivá.
Obr. 2.34. K výpočtu potenciál-
nej energie v blízkosti povrchu
Zeme.
R
h
r
m
M
S
S
m
M
a
agg
odr
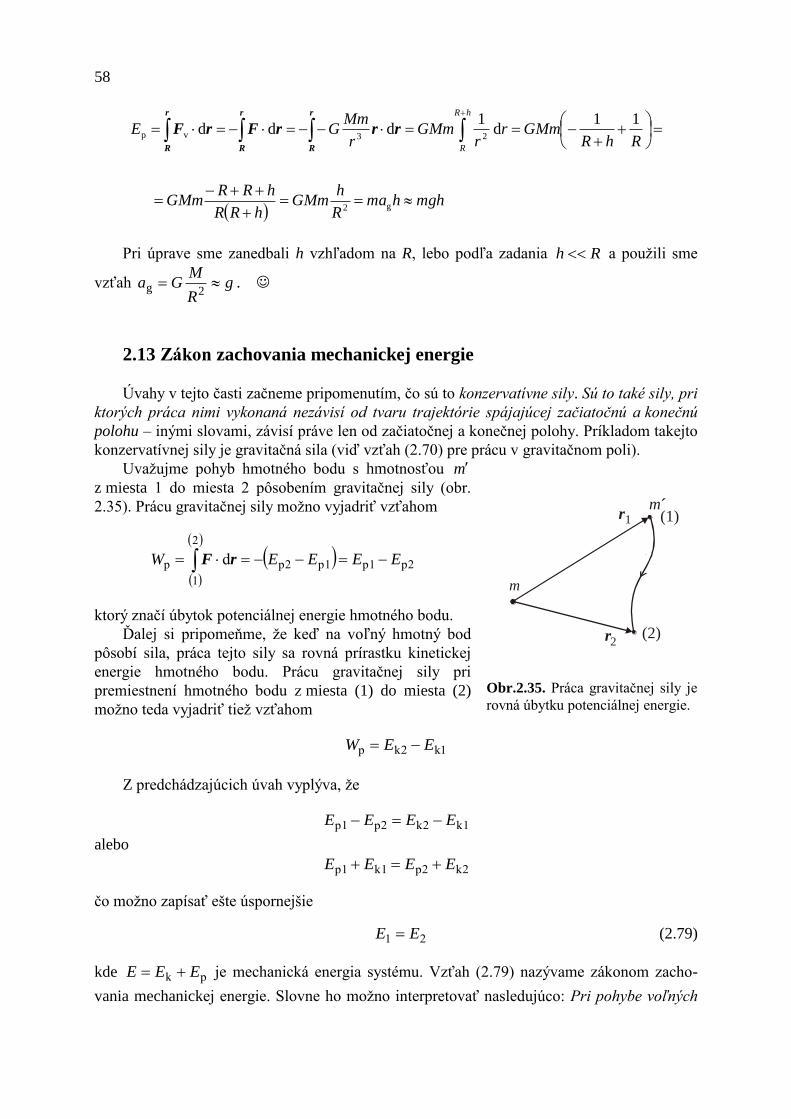
58
mghhma
R
hGMm
hRR
hRRGMm
RhRGMmr
rGMm
r
MmGE
hR
R
g2
23vp
11d
1ddd rrrFrF
r
R
r
R
r
R
Pri úprave sme zanedbali h vzhľadom na R, lebo podľa zadania Rh a použili sme
vzťah gR
MGa
2g .
2.13 Zákon zachovania mechanickej energie
Úvahy v tejto časti začneme pripomenutím, čo sú to konzervatívne sily. Sú to také sily, pri
ktorých práca nimi vykonaná nezávisí od tvaru trajektórie spájajúcej začiatočnú a konečnú
polohu – inými slovami, závisí práve len od začiatočnej a konečnej polohy. Príkladom takejto
konzervatívnej sily je gravitačná sila (viď vzťah (2.70) pre prácu v gravitačnom poli).
Uvažujme pohyb hmotného bodu s hmotnosťou m
z miesta 1 do miesta 2 pôsobením gravitačnej sily (obr.
2.35). Prácu gravitačnej sily možno vyjadriť vzťahom
p2p1p1p2
2
1
p d EEEEW rF
ktorý značí úbytok potenciálnej energie hmotného bodu.
Ďalej si pripomeňme, že keď na voľný hmotný bod
pôsobí sila, práca tejto sily sa rovná prírastku kinetickej
energie hmotného bodu. Prácu gravitačnej sily pri
premiestnení hmotného bodu z miesta (1) do miesta (2)
možno teda vyjadriť tiež vzťahom
1kk2p EEW
Z predchádzajúcich úvah vyplýva, že
k1k2p2p1 EEEE
alebo
k2p2k1p1 EEEE
čo možno zapísať ešte úspornejšie
21 EE (2.79)
kde pk EEE je mechanická energia systému. Vzťah (2.79) nazývame zákonom zacho-
vania mechanickej energie. Slovne ho možno interpretovať nasledujúco: Pri pohybe voľných
Obr.2.35. Práca gravitačnej sily je
rovná úbytku potenciálnej energie.
r
r1
2
m
m´
(2)
(1)

59
hmotných bodov spôsobenom len účinkom medzi nimi pôsobiacich gravitačných síl je súčet
ich vzájomnej potenciálnej a kinetickej energie konštantný.
Príklad 2.17. Malý kúsok ľadu hmotnosti m sa šmýka bez trenia dolu žľabom, ktorý
prechádza do zvislého kruhu s polomerom R. Začiatočná poloha je vo výške 5R nad najnižším
bodom trajektórie. Treba vypočítať: a) rýchlosť ľadu v najvyššom bode kruhu, b) normálovú
silu, ktorou pôsobí ľad na kruh v tom istom bode.
Riešenie: a) Na určenie rýchlosti ľadu použijeme zákon zachovania mechanickej energie
p2k2p1k1 EEEE
kde k1E , p1E , k2E , p2E sú kinetické a potenciálne energie ľadu v mieste 1 a v mieste 2,
pozri obr. 2.36. Po dosadení za kinetické a potenciálne energie dostaneme rovnicu
R.mgmR.mg 22
150 2
2 v
z ktorej určíme rýchlosť ľadu v najvyššom bode kruhu
gR62 v
b) Dostredivá sila dF pôsobiaca na ľad v najvyššom bode kruhu je rovná súčtu tiaže ľadu
gF a normálovej sily nF , ktorou pôsobí kruh na ľad
nd FFF g
Po prepísaní tejto rovnice do skalárneho tvaru a dosadení za RmF 22d v a mgFg
dostaneme
n
22 FmgR
m v
z čoho sila, ktorou pôsobí kruh na ľad je
mgmgR
gRmmg
RmF 5
62
2n
v
Zo zákona akcie a reakcie vyplýva, že
rovnako veľkou, avšak opačne orientovanou
silou pôsobí ľad na kruh.
Treba si však uvedomiť, že mechanická
energia sa zachováva len vtedy, keď sily
konajúce prácu sú konzervatívne a vykonaná
práca je daná úbytkom potenciálnej energie.
Obr. 2.36. K príkladu 2.17. Keď nepôsobia
disipatívne sily, celková mechanická energia
telesa sa zachováva.
F
F
-F
n
n
g2R
5R
m
m
1
2

60
Keď bude konať prácu aj nekonzervatívna sila (napr. odporová sila), potom sa celková
mechanická energia nezachováva – bude sa počas pohybu meniť. Aby sme zistili ako sa bude
meniť, budeme vychádzať zo vzťahu pre zmenu kinetickej energie 1kk2 EEW .
V uvažovanom prípade sa práca W bude skladať z dvoch členov – z práce konzervatívnych síl
p2p1K EEW a z práce nekonzervatívnych síl WN. Prácu nekonzervatívnych síl nemôžeme
obecne vyjadriť pretože jej hodnota závisí na detailoch pohybu objektu. Aby sme ju mohli
určiť, musíme poznať trajektóriu a ako sa pozdĺž nej mení sila.
Po týchto úvahách môžeme písať, že
k1k2Np2p1NK EEWEEWWW
a po úprave
Nk1p1k2p2 WEEEE
alebo
N12 WEE (2.80)
kde E1 a E2 sú celkové mechanické energie v miestach (1) a (2).
Zo vzťahu (2.80) vidno, že zmena mechanickej energie 12 EE je rovná práci
nekonzervatívnych síl vykonanej pozdĺž trajektórie z miesta (1) do miesta (2). Teda, keď
poznáme mechanickú energiu hmotného bodu (telesa) v mieste (1) a (2), môžeme pomocou
vzťahu (2.80) vypočítať prácu vykonanú nekonzervatívnymi silami (trením, deformačnú
prácu).
Príklad 2.18. Lyžiar sa spúšťa dole kopcom z miesta, ktoré je nad úpätím vo výške
m 20 . Jeho rýchlosť na úpätí je 1h . km 54 . Akú prácu vykonali disipatívne sily (trenie,
odpor vzduchu)?
Riešenie: Na riešenie úlohy použijeme túto úvahu: Práca gravitačnej sily, ktorá je rovná
poklesu potenciálnej energie lyžiara, teda p2p1 EE , plus práca disipatívnych síl NW sa
rovná prírastku kinetickej energie k1k2 EE lyžiara
(obr. 2.37), teda platí
k1k2Np2p1 EEWEE
Z tejto rovnice potom práca disipatívnych síl je
J 5860m 20 .s . m 9,81 . kg 70s .m 15 . kg 70 2
1
2
1
2222
2
2k1p1k2p2N
.
mghmEEEEW v
Záporné znamienko vo výsledku hovorí o tom, že práca
disipatívnych síl zmenšuje celkovú energiu lyžiara.
Obr. 2.37. Práca disipatívnych
síl zmenšuje celkovú energiu
lyžiara.
1
2
h

61
Súhrn
2.1 Úvod
Posuvný pohyb sa vyznačuje tým, že každá priamka a rovina v tuhom telese zostáva pri tomto
pohybe rovnobežná so svojou začiatočnou polohou. Všetky body tuhého telesa sa pohybujú
pri posuvnom pohybe po rovnakých trajektóriách a majú súčasne rovnaké rýchlosti
a zrýchlenia.
Otáčavý pohyb je charakterizovaný tým, že pri ňom všetky body tuhého telesa konajú pohyb
po kružniciach okolo spoločnej osi rotácie. Sprievodiče všetkých bodov telesa opíšu za určitý
čas rovnaké stredové uhly a všetky body telesa majú súčasne rovnaké uhlové rýchlosti a
uhlové zrýchlenia.
Obecný pohyb tuhého telesa je pohyb zložený z pohybu posuvného a otáčavého a každú
z týchto zložiek môžeme určiť pohybom niektorého bodu daného telesa.
2.2 Základné veličiny charakterizujúce pohyb
Polohový vektor. Pohyb hmotného bodu poznáme, ak vieme vyjadriť funkčnú závislosť medzi
jeho súradnicami a časom. Ak sú jeho súradnice v čase nepremenné (konštantné), hmotný bod
je v pokoji. Pohyb hmotného bodu je opísaný rovnicami
tzztyytxx ; ; (2.1)
Polohu hmotného bodu možno udať aj jeho polohovým vektorom r. Je to vektor, ktorý má
začiatočný bod v začiatku súradnicovej sústavy a koncový bod v mieste, kde sa hmotný bod
práve nachádza. Možno ho vyjadriť pomocou súradníc x, y, z takto
kjir zyx (2.2)
kde i, j, k sú jednotkové vektory v smere kladných polosí x, y, z.
Rýchlosť. Vektor okamžitej rýchlosti v je definovaný vzťahom
ttt d
d
Δ
Δ lim
0Δ
rr
v (2.4)
Častokrát sa používa aj priemerná rýchlosť, ktorá je definovaná ako rýchlosť, ktorou by sa
musel trvale pohybovať hmotný bod, aby za časový interval t prešiel dráhu s
t
s
Δ
Δp v (2.9)
Zrýchlenie súvisí so zmenou rýchlosti a je definované nasledujúco
2
2
0Δ d
d
d
d
Δ
Δ lim
tttt
ra
vv (2.10)
2.3 Klasifikácia pohybov
Najjednoduchšiu klasifikáciu mechanických pohybov hmotného bodu môžeme urobiť
pomocou analýzy vektora rýchlosti τvv . Ak konštv pohyb je rovnomerný; ak konštv

62
pohyb je nerovnomerný a ak konštτ pohyb je priamočiary a ak konštτ pohyb je
krivočiary.
2.4 Priamočiary pohyb
2.4.1 Rovnomerný priamočiary pohyb. Polohový vektor v tomto prípade možno vyjadriť
takto
t 0 v rr (2.15)
2.4.2 Nerovnomerný priamočiary pohyb.
a) Rovnomerne zrýchlený priamočiary pohyb. V tomto prípade rýchlosť je rovná
ta 0vv (2.18)
a polohový vektor 2
21
00 tt arr v (2.19)
b) Nerovnomerne zrýchlený priamočiary pohyb. V tomto prípade, keď chceme dostať
konkrétny vzťah pre polohový vektor, musíme vedieť ako závisí zrýchlenie od času. Rýchlosť,
ako funkciu času vypočítame podľa vzťahu
t
t
0
0 d avv
a polohový vektor následne podľa vzťahu
t tt t
ttttt0 0
00
0 0
00 d d d d ararr vv (2.21)
2.5 Príklad krivočiareho pohybu – pohyb po kružnici
2.5.1 Základné charakteristiky.
Uhlová dráha je uhol vytvorený sprievodičom pohybujúceho sa hmotného bodu a
sprievodičom zvoleným za základ. Vektor uhla je vektor kolmý na ramená uhla a smerujúci
na tú stranu, z ktorej sa otáčanie hmotného bodu javí proti pohybu hodinových ručičiek.
Vektor uhlovej rýchlosti je definovaný vzťahom
td
dω (2.22)
Vektor uhlového zrýchlenia je
2
2
d
d
d
d
tt
ω (2.23)
Analogicky ako pri priamočiarych pohyboch môžeme získať vzťahy pre výpočet uhlovej
rýchlosti
t
t
0
0 d ωω (2.24)
a uhlovej dráhy
t
t
0
0 d ω (2.25)

63
Perióda pohybu po kružnici je čas T potrebný na jeden obeh
π2π2
v
rT (2.26)
Frekvencia je počet obehov za jednotku času
rTf
π2π2
1 v
(2.27)
2.5.2 Rýchlosť a zrýchlenie pri pohybe hmotného bodu po kružnici
Pretože pohyb po kružnici je rovinný pohyb, môžeme polohový vektor hmotného bodu
vyjadriť takto
njijir rrrr sin + cos sin cos (2.28)
kde r je polomer kružnice, – uhol, ktorý zviera sprievodič hmotného bodu s kladným
smerom osi x, i, j, k – jednotkové vektory v smere osí x, y a z, n – jednotkový vektor v smere
polohového vektora. Rýchlosť pohybujúceho sa hmotného bodu je potom
ττjijir
v
cos sin cos
d
d sin
d
d
d
d
rr
ttr
tv (2.29)
Súvis medzi vektorom obvodovej rýchlosti v a vektorom uhlovej rýchlosti ω je daný
vzťahom
rωnknkr
rrt
d
dv (2.30)
Zrýchlenie hmotného bodu pri pohybe po kružnici je
ntd
d
d
d
d
d
d
daarωωr
rωr
ωrωa
tttt
v
(2.31)
kde at je tangenciálne zrýchlenie – zrýchlenie súvisiace so zmenou veľkosti rýchlosti
τrτa d
dt r
t
v (2.32)
a an je normálové (dostredivé) zrýchlenie súvisiace so zmenou smeru pohybu
nrrωωa 22n r (2.33)
2.6 Zložený pohyb
O zloženom pohybe hovoríme vtedy, keď skúmame pohyb hmotného bodu (telesa) z hľadiska
dvoch vzťažných sústav, z ktorých jedna sa voči druhej pohybuje. Nech sústava S sa
pohybuje vzhľadom na sústavu S tak, že rýchlosť jej začiatku je 0v , zrýchlenie 0a , uhlová

64
rýchlosť a uhlové zrýchlenie . Polohový vektor, rýchlosť a zrýchlenie hmotného bodu s
hmotnosťou m vzhľadom na sústavu S sú: ar ,, v a vzhľadom na sústavu S: r, v, a.
Polohový vektor r možno vyjadriť ako
rrr 0 (2.36)
Rýchlosť a zrýchlenie vzhľadom na čiarkovanú sústavu S možno teda vyjadriť vzťahmi
rω 0vvv (2.39)
aaaaarrωωωaaa odC00 2 v (2.40)
2.7 Newtonove pohybové zákony
Hmotnosť je mierou zotrvačných (i gravitačných) vlastností telesa. Je mierou odporu telesa
proti zmene jeho pohybového stavu.
Sila je mierou vzájomného pôsobenia telies. Nemôže existovať sama o sebe – telesá pôsobia
na seba prostredníctvom polí.
1. Newtonov zákon – zákon zotrvačnosti: Existuje súradnicová sústava, v ktorej hmotný bod
(teleso) zotrváva v pokoji alebo v rovnomernom priamočiarom pohybe, kým nie je nútené
pôsobením iných hmotných bodov (telies) svoj pohybový stav zmeniť.
2. Newtonov zákon – zákon sily: Sila pôsobiaca na hmotný bod (teleso) je rovná súčinu jeho
hmotnosti m a zrýchlenia a, ktoré mu udeľuje
aF m (2.41)
sila F je výslednica síl pôsobiacich na hmotný bod (teleso)
iFF
3. Newtonov zákon – akcie a reakcie: Ak teleso 1 pôsobí na teleso 2 silou 12F , potom teleso 2
pôsobí na teleso 1 silou 21F , ktorá má rovnakú veľkosť ako sila 12F , a ktorá leží ma tej istej
vektorovej priamke ako sila 12F , avšak má opačný smer
2112 FF (2.42)
Galileov princíp relativity: Základné zákony fyziky sa rovnako formulujú pre všetky
súradnicové sústavy, ktoré sa pohybujú navzájom konštantnými rýchlosťami. Inými slovami:
Nijakými fyzikálnymi pokusmi sa nemožno presvedčiť, či je súradnicová sústava v pokoji
alebo v rovnomernom priamočiarom pohybe.
2.8 Pohyb hmotného bodu v neinerciálnej súradnicovej sústave
Sila pôsobiaca na hmotný bod v neinerciálnej súradnicovej sústave je
rαrωωωaaaF mmmmmm v20 (2.43)
alebo
FFFFFF odC0 (2.44)

65
kde a je zrýchlenie vzhľadom na inerciálnu sústavu, a0 – zrýchlenie začiatku neinerciálnej
sústavy, – uhlová rýchlosť, s ktorou rotuje neinerciálna sústava, – uhlové zrýchlenie
neinerciálnej sústavy, F – sila pôsobiaca na hmotný bod v neinerciálnej sústave, aF m –
reálna sila, 00 aF m – sila súvisiaca so zrýchlením začiatku neinerciálnej sústavy,
v ωF m2C – Coriolisova sila, rωωF mod – odstredivá sila, rαF m –
sila súvisiaca so zmenou uhlovej rýchlosti otáčania neinerciálnej sústavy.
2.9 Hybnosť, impulz sily, zákon zachovania hybnosti
Hybnosť hmotného bodu je definovaná súčinom jeho hmotnosti m a rýchlosti v
vmp (2.45)
Impulz sily (časový účinok sily) je definovaný vzťahom
t
t
d 0
FI (2.46)
Zákon zachovania hybnosti
.21 konšt pp (2.49)
čo možno slovne interpretovať takto: V izolovanej sústave hmotných bodov ich celková
hybnosť zostáva konštantná. Izolovaná sústava hmotných bodov (telies) je taká sústava
hmotných bodov, na ktoré nepôsobia žiadne vonkajšie sily (t.j. žiadne objekty mimo sústavy)
alebo výslednica vonkajších síl je nulová.
2.10 Energia, práca, výkon, účinnosť
Mechanická práca W (dráhový účinok sily) je definovaná vzťahom
2
1
d
r
r
rFW (2.50)
kde F je sila, r – polohový vektor pôsobiska sily.
Výkon je práca vykonaná za jednotku času
t
WP
d
d (2.52)
Vzťahom (2.52) je definovaný okamžitý výkon.
Účinnosť stroja alebo zariadenia je definovaná vzťahom
pP
P (2.55)
kde P je výkon stroja a Pp príkon (výkon dodávaný do stroja).
2.11 Kinetická a potenciálna energia
Kinetická energia hmotného bodu pohybujúceho sa rýchlosťou v je určená vzťahom
2
k 2
1vmE (2.56)

66
kde m je hmotnosť hmotného bodu. Práca sily pôsobiacej na hmotný bod sa rovná zmene jeho
kinetickej energie kΔEW .
Potenciálna energia hmotného bodu v mieste (B) vzhľadom na miesto (A) sa rovná práci,
ktorú vykonajú vonkajšie sily pri premiestnení hmotného bodu z miesta (A) do miesta (B).
Potenciálna energia hmotného bodu v mieste (B) vzhľadom na miesto (A) je teda definovaná
vzťahom
B
A
B
A
E rFrF ddvp (2.58)
kde F je sila poľa – sila, ktorú musí premáhať vonkajšia sila, FF v , keď koná prácu a rd
je zmena polohového vektora pôsobiska sily.
2.12 Gravitačné pole
2.12.2 Newtonov gravitačný zákon: Sila, ktorou hmotný bod s hmotnosťou m priťahuje
hmotný bod s hmotnosťou m sa dá vyjadriť nasledujúco
rF3r
mmG
(2.64)
V tomto vzťahu r je polohový vektor hmotného bodu s hmotnosťou m vzhľadom na hmotný
bod s hmotnosťou m.
2.12.3 Intenzita gravitačného poľa
m
FK (2.66)
Intenzita gravitačného poľa je teda sila, ktorá v danom bode poľa pôsobí na objekt
s jednotkovou hmotnosťou.
2.12.4 Gravitačná potenciálna energia. Gravitačný potenciál. Absolútna potenciálna energia
Ep je definovaná ako práca vonkajších síl, ktorú vykonajú pri premiestnení hmotného bodu
s hmotnosťou m z referenčného miesta nachádzajúceho sa v nekonečne do miesta vo
vzdialenosti r od zdroja gravitačného poľa (hmotného bodu s hmotnosťou m)
r
mmGE
p (2.71)
Tento vzťah je vyjadrením vzájomnej potenciálnej energie dvoch hmotných bodov, ktoré sú
vo vzájomnej vzdialenosti r.
Potenciál gravitačného poľa
m
E
pg (2.72)
je prácu vonkajších síl potrebná na prenesenie hmotného objektu s jednotkovou hmotnosťou
z referenčného bodu do daného bodu.
Intenzita gravitačného poľa sa rovná zápornému gradientu potenciálu
gg grad K (2.76)

67
2.12.5 Gravitačné pole Zeme. Ak ostatné fiktívne sily zanedbáme na telesá nachádzajúce sa
na zemskom povrchu pôsobí sila ,F ktorá je výslednicou gravitačnej a odstredivej sily
odgodgod aaaaFFF mmm
Potom zrýchlenie voľne opadajúcich telies možno vyjadriť ako súčet gravitačného
a odstredivého zrýchlenia
odg aag (2.78)
Potenciálnu energiu telesa s hmotnosťou m vo výške h nad zemským povrchom, pričom
Rh , kde R je polomer Zeme, počítame podľa vzorca mghE p .
2.13 Zákon zachovania mechanickej energie
Pri pohybe voľných hmotných bodov spôsobenom účinkom medzi nimi pôsobiacich
gravitačných síl je súčet ich vzájomnej potenciálnej a kinetickej energie konštantný
k2p2k1p1 EEEE
čo možno zapísať úspornejšie ako
21 EE (2.79)
kde pk EEE je mechanická energia systému.

3 POHYB SÚSTAVY HMOTNÝCH BODOV A DOKONA-
LE TUHÉHO TELESA
3.1 Úvod
Doteraz sme sa zaoberali pohybom telesa, ktorého geometrické rozmery sme mohli
zanedbať. Také teleso sme nazvali hmotným bodom. Avšak náhrada pohybu skutočných
objektov pohybom jediného hmotného bodu nemusí byť vždy postačujúca. Reálne telesá
môžu konať, ako sme už spomenuli v 2. kapitole, okrem posuvného pohybu aj pohyb otáčavý.
Ako prvý krok k opisu pohybu telesa si vytvoríme model reálneho telesa, ktorý pozostáva
z veľkého počtu hmotných bodov – sústavu hmotných bodov (SHB). Na SHB budeme
aplikovať Newtonove dynamické zákony a neskôr, ak si predstavíme, že reálne teleso je
zložené z takého ohromného počtu hmotných bodov, že môžeme pokladať hmotnosť v telese
za spojito rozloženú, uvedieme aj základné poznatky o pohybe tuhého telesa. V našich
nasledujúcich úvahách budeme predpokladať, že vzájomná vzdialenosť hmotných bodov
v sústave sa nemení a že teleso je nedeformovateľné – je to dokonale tuhé teleso.
3.2 Kinematika sústavy hmotných bodov a telesa
Pohyb SHB (telesa) je jednoznačne určený, ak poznáme pohyb ľubovoľného bodu
sústavy, čo značí, že vieme v ľubovoľnom čase určiť súradnice ľubovoľného bodu. Na to
potrebujeme poznať, ak SHB pozostáva z n bodov, n rovníc
tttt nnii rrrrrrrr ........ ; .......... ; ; 2211
Zdá sa, že keď hmotných bodov je veľmi veľa (pri tuhom telese prakticky nekonečne
veľa) je tento problém neriešiteľný. Hmotné body sú však v sústave viazané (ich vzájomné
polohy sa nemenia) a potom už pohyb jednotlivých
bodov nie je nezávislý. Napríklad, keď je SHB (teleso)
upevnené tak, že jeden jej bod, napríklad A (obr. 3.1),
nemôže zmeniť svoju polohu vzhľadom na zvolenú
súradnicovú sústavu, môžu sa ostatné body SHB (telesa)
ešte pohybovať po povrchoch gulí s polomermi
rovnajúcimi sa ich vzdialenostiam od nehybného bodu
A. Keď sa nemôžu pohybovať dva body SHB (telesa),
napr. A a B, SHB (teleso) sa môže ešte otáčať okolo osi
prechádzajúcej bodmi A a B. Keď sa však nemôžu
pohybovať tri body SHB (telesa) neležiace na tej istej
priamke, napr. A, B a C, potom sa už SHB (teleso)
nemôže vôbec pohybovať. Teda poloha SHB (tuhého
telesa) vzhľadom na zvolenú súradnicovú sústavu je úplne určená polohami troch jej (jeho)
bodov, ktoré neležia na jednej priamke.
Obr. 3.1. K opisu pohybu SHB a telesa.
A
B
C
d
dd
BA
CBAC

69
Z uvedeného sa zdá, že na určenie polohy SHB (telesa) je potrebných deväť súradníc:
) , ,( , , CBAizyx iii . Nie je tomu však tak, lebo, ako sme už spomenuli, vzdialenosti bodov
v SHB (telese) sú v dôsledku definície SHB, resp. dôsledku tuhosti telesa nemenné. Napr.
vzdialenosti bodov ACCBBA , , ddd spĺňajú vzťahy
2AB2
AB2
AB2BA zzyyxxd
2BC2
BC2
BC2CB zzyyxxd
2CA2
CA2
CA2AC zzyyxxd
a preto na určenie polohy úplne voľnej SHB (telesa) postačuje šesť vhodne vybraných
súradníc troch bodov, ktoré neležia na jednej priamke. Hovoríme, že úplne voľná SHB (teleso)
má šesť stupňov voľnosti pohybu. Teda počet stupňov voľnosti je počet údajov potrebných na
určenie polohy objektu pri danom pohybe.
Napríklad hmotný bod pohybujúci sa po priamke má jeden stupeň voľnosti, ak je jeho
pohyb viazaný na rovinu, má dva stupne voľnosti, pri pohybe v priestore má tri stupne
voľnosti. Polohu telesa upevneného v jednom bode určujú tri vhodne zvolené súradnice jeho
ďalších dvoch bodov, ktoré s nehybným bodom telesa neležia na jednej priamke – v jednom
bode upevnené tuhé teleso má tri stupne voľnosti. Polohu tuhého telesa uloženého na osi
určuje jedna súradnica jediného bodu, ktorý neleží na osi otáčania – tuhé teleso uložené na osi
má jeden stupeň voľnosti.
Najjednoduchším druhom pohybu tuhého telesa je posuvný (translačný) pohyb. Pri
translačnom pohybe spojnica ľubovoľných bodov telesa zachováva svoj smer. Z toho vyplýva
tiež, že vektory rýchlosti a zrýchlenia všetkých jeho bodov v danom okamihu sú rovnaké a že
všetky body sa pohybujú po rovnakých trajektóriach. Teleso konajúce posuvný pohyb má tri
stupne voľnosti – jeho poloha je určená polohou jediného bodu.
Otáčanie sa tuhého telesa okolo pevnej osi. Keď sú pri pohybe telesa dva z jeho bodov
v pokoji, sú v pokoji všetky body na priamke prechádzajúcej oboma bodmi. Túto priamku
nazývame osou otáčania (rotácie), ktorá má v tomto prípade v priestore stály smer. Pri otáčaní
sa telesa okolo nehybnej osi sa pohybujú jednotlivé body telesa po kružniciach ležiacich
v rovinách kolmých na túto os. Stredy kružníc ležia na osi otáčania.
Pohyb úplne voľného telesa. V časti 2.1 sme už hovorili, že všeobecný pohyb telesa, ktorý
niekedy nazývame aj zložený pohyb pozostáva z pohybu posuvného (translačného)
a otáčavého (rotačného). Ľubovoľný pohyb tuhého telesa
možno rozložiť na nekonečne malé, po sebe nasledujúce,
priamočiare translácie a nekonečne malé po sebe
nasledujúce rotácie okolo okamžitej osi otáčania. Keď si
zvolíme v telese vhodný bod 0 , dosiahneme potrebné
elementárne pootočenia rotáciou okolo priamok idúcich
týmto bodom. Tieto priamky však menia v pozorovacej
sústave i v samotnom telese svoju orientáciu, a preto sa
nazývajú okamžité osi rotácie. Priestorovú orientáciu
takejto okamžitej osi otáčania je možné určiť vektorom
uhlovej rýchlosti . Nech 0r je polohový vektor vhodne
zvoleného bodu 0 tuhého telesa úplne voľného vzhľadom na začiatok 0 inerciálnej
súradnicovej sústavy S (obr. 3.2). Polohový vektor iného bodu A telesa vzhľadom na bod 0
nech je r a vzhľadom na bod 0 nech je r . Potom platí
rrr 0
Obr. 3.2. Všeobecný pohyb tele-
sa je zložený z translačného a ro-
tačného pohybu.
r
r
r
0
00
´
´
A
S
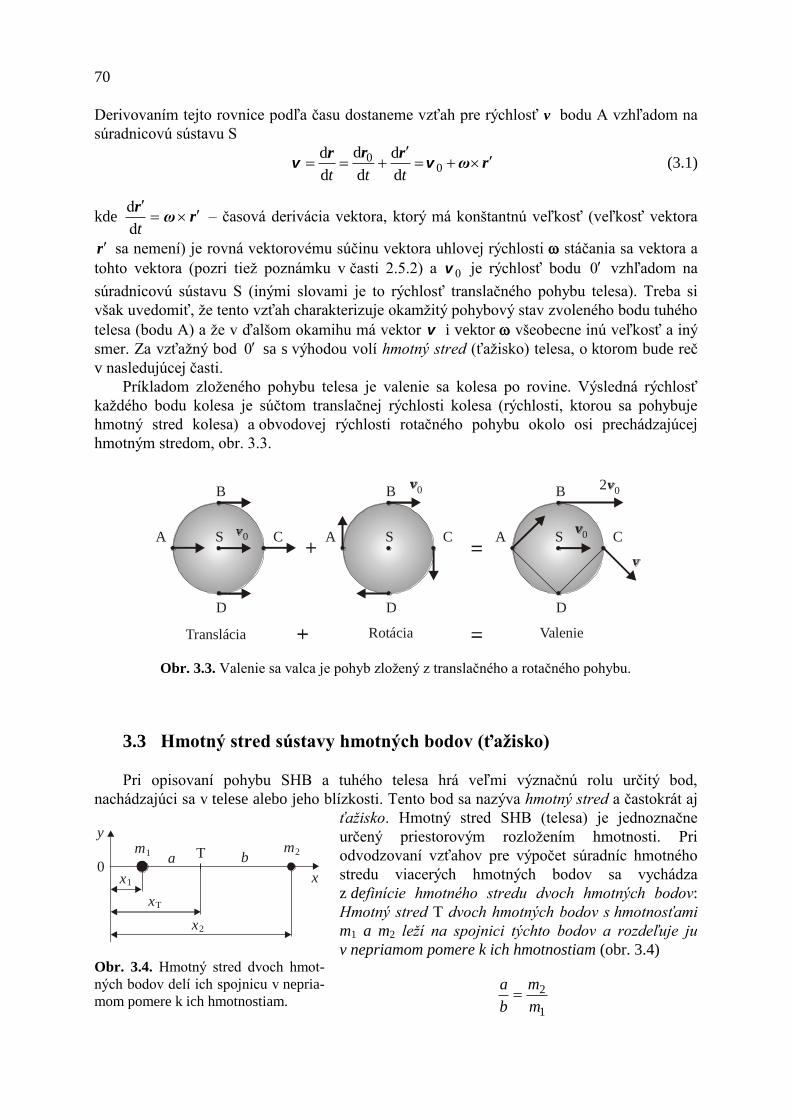
70
Derivovaním tejto rovnice podľa času dostaneme vzťah pre rýchlosť v bodu A vzhľadom na
súradnicovú sústavu S
rωrrr
00
d
d
d
d
d
dvv
ttt (3.1)
kde rωr
td
d – časová derivácia vektora, ktorý má konštantnú veľkosť (veľkosť vektora
r sa nemení) je rovná vektorovému súčinu vektora uhlovej rýchlosti stáčania sa vektora a
tohto vektora (pozri tiež poznámku v časti 2.5.2) a 0v je rýchlosť bodu 0 vzhľadom na
súradnicovú sústavu S (inými slovami je to rýchlosť translačného pohybu telesa). Treba si
však uvedomiť, že tento vzťah charakterizuje okamžitý pohybový stav zvoleného bodu tuhého
telesa (bodu A) a že v ďalšom okamihu má vektor v i vektor všeobecne inú veľkosť a iný
smer. Za vzťažný bod 0 sa s výhodou volí hmotný stred (ťažisko) telesa, o ktorom bude reč
v nasledujúcej časti.
Príkladom zloženého pohybu telesa je valenie sa kolesa po rovine. Výsledná rýchlosť
každého bodu kolesa je súčtom translačnej rýchlosti kolesa (rýchlosti, ktorou sa pohybuje
hmotný stred kolesa) a obvodovej rýchlosti rotačného pohybu okolo osi prechádzajúcej
hmotným stredom, obr. 3.3.
3.3 Hmotný stred sústavy hmotných bodov (ťažisko)
Pri opisovaní pohybu SHB a tuhého telesa hrá veľmi význačnú rolu určitý bod,
nachádzajúci sa v telese alebo jeho blízkosti. Tento bod sa nazýva hmotný stred a častokrát aj
ťažisko. Hmotný stred SHB (telesa) je jednoznačne
určený priestorovým rozložením hmotnosti. Pri
odvodzovaní vzťahov pre výpočet súradníc hmotného
stredu viacerých hmotných bodov sa vychádza
z definície hmotného stredu dvoch hmotných bodov:
Hmotný stred T dvoch hmotných bodov s hmotnosťami
m1 a m2 leží na spojnici týchto bodov a rozdeľuje ju
v nepriamom pomere k ich hmotnostiam (obr. 3.4)
1
2
m
m
b
a
Obr. 3.3. Valenie sa valca je pohyb zložený z translačného a rotačného pohybu.
Obr. 3.4. Hmotný stred dvoch hmot-
ných bodov delí ich spojnicu v nepria-
mom pomere k ich hmotnostiam.
S S SA A A
B B B
C C C
D D D
0 0
00 2
Translácia Rotácia Valenie
m m1 2a bT
x x
x
x
1
2
T
y
0

71
Z obr. 3.4 ďalej vyplýva, že 1T xxa a b x x 2 T . Keď dosadíme za a a b tieto
vyjadrenia, dostaneme
x x
x x
m
m
T
T
1
2
2
1
a jednoduchou úpravou získame vzťah pre výpočet x-ovej súradnice hmotného stredu dvoch
hmotných bodov
xm x m x
m mT
1 1 2 2
1 2
Ak tento poznatok rozšírime pre prípad n hmotných bodov rozmiestnených v priestore,
súradnice ich hmotného stredu môžeme určiť podľa vzťahov
; ; TTTm
zmz
m
ymy
m
xmx
iiiiii (3.2)
kde im je hmotnosť i-teho hmotného bodu, xi, yi, zi – súradnice i-teho bodu a imm –
hmotnosť celej sústavy hmotných bodov.
Polohový vektor hmotného stredu sústavy hmotných bodov možno teda vyjadriť vzťahom
kjir
r TTTT zyxm
m ii
(3.3)
Rovnorodé tuhé telesá, ktoré majú stred súmernosti (napr. guľa, kocka, kváder, valec, tyč
atď.) majú hmotný stred v tomto bode. Rovnorodé tuhé telesá, ktoré majú os súmernosti
(napr. rotačný kužeľ, ihlan, guľový vrchlík, ...) majú hmotný stred na tejto osi. Pri výpočte
súradníc hmotného stredu telesa, zloženého z telies, ktorých hmotné stredy vieme ľahko určiť,
postupujeme tak, že tieto telesá nahradíme hmotnými bodmi, ktoré sa nachádzajú v ich
hmotných stredoch, prisúdime im hmotnosť telies a na výpočet súradníc hmotného stredu
zloženého telesa použijeme vzťahy (3.2).
Príklad 3.1. Vo vrcholoch rovnostranného
trojuholníka s dĺžkou strany 12 cm (obr. 3.5) sa
nachádzajú hmotné body s hmotnosťami
g. 2a g 3 g, 5 321 mmm Kde sa nachádza
hmotný stred týchto bodov?
Riešenie: Súradnice hmotného stredu našej
sústavy hmotných bodov vypočítame podľa vzťahov
(3.2)
m
zmz
m
ymy
m
xmx
iiiiii TTT ; ;
Z obr. 3.5 – podľa našej voľby súradnicovej
sústavy – vyplýva, že súradnice hmotných bodov
Obr. 3.5. Hmotný stred SHB je jedno-
značne určený priestorovým rozložením
hmotnosti.
m
m
m
m
m1 2
3
aa
0 2
2
4
4
6
6
8
8
10
10
12 x
y
T
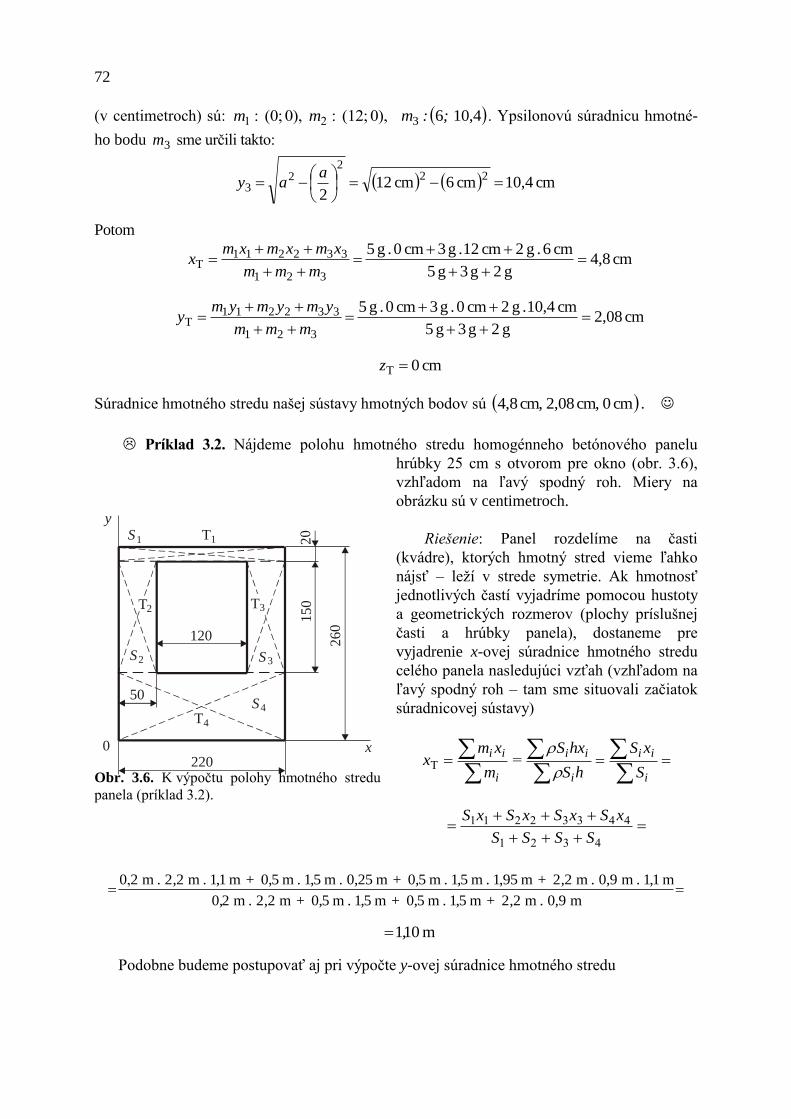
72
(v centimetroch) sú: 0), (12; : 0), (0; : 21 mm 10,4 63 ;:m . Ypsilonovú súradnicu hmotné-
ho bodu 3m sme určili takto:
cm 10,4cm 6cm 122
222
23
aay
Potom
cm 4,8g 2 g 3g 5
cm 6 . g 2cm 12 . g 3cm 0 . g 5
321
332211T
mmm
xmxmxmx
cm 2,08g 2 g 3g 5
cm 10,4 . g 2cm 0 . g 3cm 0 . g 5
321
332211T
mmm
ymymymy
cm 0T z
Súradnice hmotného stredu našej sústavy hmotných bodov sú cm 0 cm, 2,08 cm, 4,8 .
Príklad 3.2. Nájdeme polohu hmotného stredu homogénneho betónového panelu
hrúbky 25 cm s otvorom pre okno (obr. 3.6),
vzhľadom na ľavý spodný roh. Miery na
obrázku sú v centimetroch.
Riešenie: Panel rozdelíme na časti
(kvádre), ktorých hmotný stred vieme ľahko
nájsť – leží v strede symetrie. Ak hmotnosť
jednotlivých častí vyjadríme pomocou hustoty
a geometrických rozmerov (plochy príslušnej
časti a hrúbky panela), dostaneme pre
vyjadrenie x-ovej súradnice hmotného stredu
celého panela nasledujúci vzťah (vzhľadom na
ľavý spodný roh – tam sme situovali začiatok
súradnicovej sústavy)
i
ii
i
ii
i
ii
S
xS
hS
hxS
m
xmx
=T
4321
44332211
SSSS
xSxSxSxS
0 2 2 2 11 0 5 1 5 0 25 0 5 1 5 1 95 2 2 0 9 11
0 2 2 2 0 5 1 5 0 5 1 5 2 2 0 9
, m . , m . , m + , m . , m . , m + , m . , m . , m + , m . , m . , m
m . , m + , m . , m + , m . , m + , m . , m,
m 101 ,
Podobne budeme postupovať aj pri výpočte y-ovej súradnice hmotného stredu
Obr. 3.6. K výpočtu polohy hmotného stredu
panela (príklad 3.2).
120
20
260
150
220
50
y
x
S
S S
S
1 1
2
2
3
3
4
4
T
T
T
T
0

73
ym y
m
S y
ST
i i
i
i i
i
0 2 2 2 2 0 5 1 5 1 0 5 1 5 1 2 2 0 9 0
0 2 2 2 0 5 1 5 0 5 1 5 2 2 0 9
, m . , m . ,5 m + , m . , m . ,65 m + , m . , m . ,65 m + , m . , m . ,45 m
m . , m + , m . , m + , m . , m + , m . , m,
, m114
Poloha hmotného stredu panela vzhľadom na ľavý spodný roh: smerom doprava 1,1 m a
smerom hore 1,14 m.
3.4 I. pohybová rovnica sústavy hmotných bodov. Veta o pohybe
hmotného stredu
Uvažujme SHB s hmotnosťami jednotlivých hmotných bodov m1, m2, ….. mi, ….mn.
Vyberme si z tejto sústavy napr. i-ty hmotný bod a skúmajme aké sily naň pôsobia, (obr. 3.7).
Nech naň pôsobí výslednica vonkajších síl Fi a vnútorné sily jiF , ktorými naň pôsobia ostat-
né hmotné body sústavy. Tieto sily mu podľa Newtonovho zákona sily udeľujú zrýchlenie ai
ii
n
ijj
jii m aFF 1
Vnútorné sily však nepoznáme, ale podľa zákona akcie a reakcie, ak j-ty hmotný bod
pôsobí na i-ty silou jiF , potom i-ty pôsobí na j-ty silou
rovnako veľkou ale opačne orientovanou jiij FF .
Napíšme teraz pohybovú rovnicu pre celú sústavu
hmotných bodov. Na celú SHB pôsobí výslednica všetkých
vonkajších síl i
iFF a výslednica všetkých vnútorných
síl i j
jiF
i i j i
iijii m aFF (3.4)
ale 0i j
jiF . Potom rovnicu (3.4) môžeme prepísať do
tvaru
i
iim aF (3.5)
Rovnicu (3.5) upravíme nasledovne: Najprv použijeme na úpravu vzťah t
ii
d
dva . Dostaneme
i
i
i
i
i
ii
ttttm
d
d
d
d
d
d
d
d pp
pF
v (3.6)
Obr. 3.7. Na hmotný bod s hmot-
nosťou mi pôsobí výslednica von-
kajších síl Fi a sily Fji, ktorými
naň pôsobia ostatné hmotné body.
m
m
m
m
m
m1
2
3
i
j
n
F
F
F
FF
F
F
ji
1i
i1
i2 2ii
ij

74
kde i
pp i je celková hybnosť SHB. Rovnica (3.6) sa nazýva I. pohybová rovnica SHB a
opisuje translačný pohyb sústavy. Slovne ju možno formulovať takto: Súčet všetkých
vonkajších síl pôsobiacich na SHB sa rovná časovej derivácii celkovej hybnosti sústavy.
Rovnicu (3.6) možno upraviť aj takto
pF d d t
resp.
pF 2
1
Δd
t
t
t (3.7)
Z tohto vyjadrenia vyplýva názov I. impulzová veta, ktorá slovne znie: Impulz výslednice
vonkajších síl pôsobiacich na SHB sa rovná zmene celkovej hybnosti sústavy.
Teraz použijeme na úpravu rovnice (3.5) vzťah 2
2
d
d
t
ii
ra . Dostaneme
T T 2
2
2
2
2
2
d
d
d
d
d
darr
rF mm
tm
ttm i
i
i
i
ii (3.8)
lebo ako vyplýva zo vzťahu pre polohový vektor hmotného stredu SHB T rr mmi
ii . Vzťah
(3.8) sa nazýva veta o pohybe hmotného stredu (ťažiska). Slovne znie: Hmotný stred SHB sa
pohybuje tak, ako keby naň pôsobili všetky vonkajšie sily pôsobiace na sústavu a celá
hmotnosť sústavy bola sústredená v ňom.
Príklad 3.3. Máme sústavu troch hmotných bodov s nasledujúcimi hmotnosťami a
polohovými vektormi: kg, 21 m ;m 8m 21 jir kg, 22 m ;m 2m 52 jir
kg, 63 m .m 8m 83 jir V čase 0t začnú pôsobiť na jednotlivé hmotné body
sústavy nasledujúce sily: ,N 3N 21 jiF ,N 1N 32 jiF .jiF N 1N 43
Treba určiť: a) Polohový vektor hmotného stredu (ťažiska) sústavy hmotných bodov (SHB)
v čase 0t . b) Vektor zrýchlenia a veľkosť zrýchlenia ťažiska SHB. c) Vektor rýchlosti,
veľkosť rýchlosti a polohový vektor ťažiska SHB v čase s 2t , ak rýchlosť ťažiska v čase
0t bola rovná nule.
Riešenie: a) Na určenie polohového vektora hmotného stredu našej sústavy hmotných
bodov použijeme vzťah (3.3)

75
ji
jijiji
rrrr
r
m 6,8m 6,20
kg 6kg 2kg 2
m 8m 8 . kg 6m 2m 5 . kg 2m 8m 2 . kg 2
321
332211T0
mmm
mmm
m
m
i
i
i
ii
b) Na určenie zrýchlenia hmotného stredu SHB použijeme vetu o pohybe ťažiska SHB
(pozri (3.8)). Z nej vektor zrýchlenia hmotného stredu je
ji
jijijiFFFF
a
s . m 0,3 s . m 0,9
kg 6kg 2kg 2
N 1 N 4 N 1 N 3 N 3 N 2
22
321
321T
mmmmi
i
i
i
a jeho veľkosť
222222T
2TT s . m 0,949s . m ,30s . m 0,9 yx aaa
c) Keďže sily 321 a , FFF sú konštantné, nezávislé od času, hmotný stred SHB sa bude
pohybovať rovnomerne zrýchleným priamočiarym pohybom. Potom vektor rýchlosti
hmotného stredu, s uvážením, že v čase 0t je 0T0T vv , možno vyjadriť takto
tTT av
a teda vektor rýchlosti hmotného stredu a veľkosť rýchlosti hmotného stredu sú
jiji s . m 0,6 s . m 1,8s 2 . s . m 0,3 s . m 0,9 1122T2
v
a
12 12 1-2T2y
2T2xT2 s . m 1,90s . m 0,6s . m 1,8 vvv
Polohový vektor hmotného stredu SHB
2TT0T
2
1tarr
v čase s 2t je
jijirr m 6,20 m 8,00 s 2 . s . m 0,3 s . m 0,92
1 2222T0T2
3.5 Moment sily. Moment hybnosti
Pri otváraní dverí ste si iste všimli, že dvere sa tým ľahšie otvoria, čím ďalej od osi
závesov ich otvárame. Teda to, aké budú otáčavé účinky sily pôsobiacej na tuhé teleso, závisí
nielen od veľkosti a smeru pôsobiacej sily ale aj od polohy jej pôsobiska vzhľadom na os
otáčania. Otáčavé účinky sily budeme charakterizovať veličinou, ktorú nazývame moment sily.

76
Uvažujme tuhé teleso, ktoré sa môže otáčať okolo osi prechádzajúcej bodom 0 (obr. 3.8).
Kolmá vzdialenosť sin rd , kde je uhol medzi vektormi r a F, bodu 0 od vektorovej
priamky sily F sa nazýva rameno sily. Veľkosť momentu sily M vzhľadom na bod 0 je daná
súčinom ramena d a veľkosti sily F
M d F r F . ( sin ) (3.9)
Moment sily M je však vektorová veličina. Môžeme ho definovať vzťahom
FrM (3.10)
kde r je polohový vektor pôsobiska sily vzhľadom na bod 0 a F pôsobiaca sila.
Takáto definícia je úplná, lebo vyjadruje aj tú skutočnosť, že vo všeobecnom prípade
môže moment sily spôsobiť nielen zmenu pohybového stavu (uhlové zrýchlenie) telesa, ale aj
zmenu priestorovej orientácie osi otáčania.
Jednotka momentu sily je 1 N.m.
Ak na SHB (tuhé teleso) pôsobí viac síl, výsledný moment sily je daný vektorovým
súčtom jednotlivých momentov
i
in MMMMM ...21 (3.11)
Moment sily vzhľadom na os je dôležitý z hľadiska zmeny pohybového stavu otáčajúceho
sa telesa. Je to zložka momentu sily v smere osi rotácie (obr. 3.9)
0 MM
V tomto vzťahu M0 je moment sily vzhľadom na os, M –
moment sily vzhľadom na bod osi a
– jednotkový vektor v smere osi.
Ukážeme si, že moment sily vzhľadom na os nezávisí od
voľby vzťažného bodu na osi. Na tento účel si zvoľme na osi dva
body, bod A a bod B (obr. 3.10). Moment sily vzhľadom na bod
A je FrM AA a moment tej istej sily vzhľadom na bod B je
FrM BB . Ten môžeme ďalej upraviť
Obr. 3.8. Moment sily je prí-
činou rotácie telesa.
Obr. 3.9. K definícii momentu
sily vzhľadom na os.
Obr. 3.10. Moment sily vzhľadom na os
nezávisí od voľby vzťažného bodu na osi.
F
r
0
F
r
d.
M
r
r
r
F
AA
B
B
0
os
.M
M
0
0 r
F
os

77
AA0A0B MMFrFrFrrM
Veľkosť priemetu momentu sily MA do smeru osi je
A0A MM a veľkosť priemetu momentu sily MB je
AA0B MMMM , lebo moment sily
FrM 0 je kolmý na os, a teda jeho priemet do smeru
osi je nulový. Z uvedeného vyplýva, že 0B0A MM .
Z toho vidno, že moment sily vzhľadom na os naozaj
nezávisí od voľby vzťažného bodu na osi.
Zložky momentu sily vzhľadom na osi pravouhlej
súradnicovej sústavy, ako vyplýva z definície (3.10), sú
xyz
zxy
yzx
yFxFM
xFzFM
zFyFM
Grafická ilustrácia vzťahov je na obr. 3.11.
Položme si otázku: Prečo sa zastaví roztočené teleso,
napríklad bicyklové koleso? Na príčine sú momenty síl trenia
a odporu vzduchu. Zapamätajme si teda, že príčinou zmeny
pohybového stavu otáčajúceho sa telesa je moment sily.
Pri valení bicyklového kolesa (alebo starej pneuma-tiky)
– chlapci sa tak hrávajú – sa pred nami vynárajú ďalšie
otázky. Keď koleso vykonáva valivý pohyb, nespadne. Keď sa
zastaví, spadne. Prečo? A prečo roztočené koleso má
tendenciu zotrvať v otáčaní a prečo nespadneme z bicykla,
keď sa pohybujeme? Odpovede na tieto otázky súvisia s
veličinou, ktorá sa nazýva moment hybnosti. Táto veličina má
veľmi dôležité postavenie pri štúdiu dynamiky otáčania.
Moment hybnosti hmotného bodu definujeme vzťahom
prL (3.13)
kde r je vektor určujúci polohu hmotného bodu vzhľadom na bod 0 a p – hybnosť hmotného
bodu (obr. 3.12). Z definície vyplýva, že moment hybnosti je vektorová veličina. Veľkosť
momentu hybnosti hmotného bodu je
pdprL . )sin (
kde je uhol medzi vektormi r a p (alebo v) a sin rd je kolmá vzdialenosť vektorovej
priamky hybnosti od bodu 0.
Pri otáčaní sa telesa, zavádzame podobne ako moment sily vzhľadom na os, moment
hybnosti vzhľadom na os
0 LL (3.14)
Obr. 3.11. Aby sme mohli určiť
zložky momentu sily vzhľadom na
osi pravouhlej súradnicovej sústavy
musíme rozložiť silu F na zložky.
Obr. 3.12. K definícii momen-
tu hybnosti hmotného bodu.
r
x
xy
y
z
z
0
F
F
F
Fx y
z
..
.
m
r
d0
L p =m

78
V tomto vzťahu L je moment hybnosti vzhľadom na ľubovoľný bod osi a je jednotkový
vektor v smere osi.
3.6 II. pohybová rovnica sústavy hmotných bodov
K úplnému opisu pohybu sústavy hmotných bodov nestačí len I. pohybová rovnica. Aby
sme dokázali opísať aj rotačný pohyb, treba nájsť ďalšiu rovnicu. Tou bude rovnica, ktorú si
odvodíme v tejto časti a ktorá sa nazýva II. pohybová rovnica sústavy hmotných bodov alebo
v upravenej forme aj II. impulzová veta.
Príčinou rotačného pohybu je moment sily. Preto pri odvádzaní II. pohybovej rovnice
budeme vychádzať z momentu síl pôsobiacich na i-ty hmotný bod SHB a potom získané
poznatky rozšírime na celú sústavu hmotných bodov. Na i-ty
hmotný bod sústavy (obr. 3.13) pôsobí výsledný moment sily iM
vyjadrený vzťahom
j
jiiii FFrM (3.15)
kde ir je polohový vektor i-teho hmotného bodu, iF – výslednica
vonkajších síl pôsobiacich na i-ty hmotný bod, jiF – sila, ktorou
pôsobí j-ty hmotný bod na i-ty hmotný bod a j
jiF – suma
vnútorných síl pôsobiacich na i-ty hmotný bod. Avšak podľa
Newtonovho zákona sily .m ii
j
jii aFF S uvážením tohto
vzťahu a definície zrýchlenia tii ddva môžeme vzťah (3.15) upraviť takto
t
mtt
mm iiii
iiiiiii
d
d
d
d
d
d LrrarM v
v (3.16)
V tomto vzťahu iL je moment hybnosti i-teho hmotného bodu a ďalej sme pri jeho úprave
využili skutočnosť, že vektorový súčin dvoch rovnobežných vektorov sa rovná nule
t
mmt
mt
iiiii
iiii
d
d
d
d
d
d vvv r
rr
tm
tmm i
iii
iiiiid
d
d
d vvvv rr
teda, v našom prípade .m iii 0 vv
Na celú sústavu hmotných bodov pôsobí moment sily M, ktorý je výslednicou (súčtom)
momentov síl pôsobiacich na jednotlivé hmotné body
i
i
i i j
jiiii
i i j
jiiiit
LFrFrFFrMMd
d (3.17)
Obr. 3.13. K odvodeniu
II. pohybovej rovnice sú-
stavy hmotných bodov.
m
m
m
m
m
m
1
2
3
i
i
j
n
F
FFji
i
i
ij
0
r

79
Výslednica momentov vnútorných síl sa však rovná nule:
0
i j
jii Fr , čo zjednodušene ukážeme pre prípad dvoch
hmotných bodov. Majme dva hmotné body s hmotnosťami 1m a 2m ,
(obr. 3.14). Na hmotný bod 1 pôsobí hmotný bod 2 silou (vnútornou)
21F a na hmotný bod 2 podľa zákona akcie a reakcie pôsobí hmotný
bod 1 silou .2112 FF Momenty týchto síl vzhľadom na bod 0
možno vyjadriť takto: 211 Fr a 122 Fr . Potom ich suma
,02121212211122211
2
1
2
1
FrrFrFrFrFrFr
iij
j
jii lebo vektor
21 rr má smer vektora sily, a preto ich vektorový súčin sa rovná nule.
Rovnicu (3.17) možno potom prepísať do tvaru
td
dLM (3.18)
kde M je už len výslednica momentov vonkajších síl pôsobiacich na sústavu a i
iLL je
výsledný moment hybnosti SHB. Rovnica (3.18) sa nazýva druhá pohybová rovnica sústavy
hmotných bodov. Slovne ju možno interpretovať nasledujúco: Súčet momentov vonkajších síl
pôsobiacich na sústavu hmotných bodov sa rovná časovej derivácii celkového momentu
hybnosti sústavy.
Rovnicu (3.18) možno upraviť aj takto
LM d d t
resp.
LM 2
1
Δd
t
t
t (3.19)
Z tohto vyjadrenia II. pohybovej rovnice SHB vyplýva názov II. impulzová veta, ktorá slovne
znie: Impulz výslednice momentov vonkajších síl pôsobiacich na SHB sa rovná zmene
celkového momentu hybnosti sústavy.
3.7 Dokonale tuhé teleso. Skladanie síl v tuhom telese
V predchádzajúcich častiach sme aplikovali Newtonove dynamické zákony na diskrétne
rozloženú hmotnosť, na sústavu hmotných bodov. Keď týchto bodov je tak veľa a sú tak
blízko pri sebe, že z nášho pohľadu môžeme hmotnosť považovať za spojito rozloženú,
hovoríme o tuhom telese. Naozaj, reálne telesá sa skladajú z hmotných častíc – atómov, resp.
molekúl. V našich nasledujúcich úvahách budeme predpokladať, že vzájomná vzdialenosť
atómov v telese sa nemení, teda teleso je nedeformovateľné – je to dokonale tuhé teleso.
Obr. 3.14. Výslednica
momentov vnútorných
síl sa rovná nule.
mm1
1
2
2
F F1221
0
r r
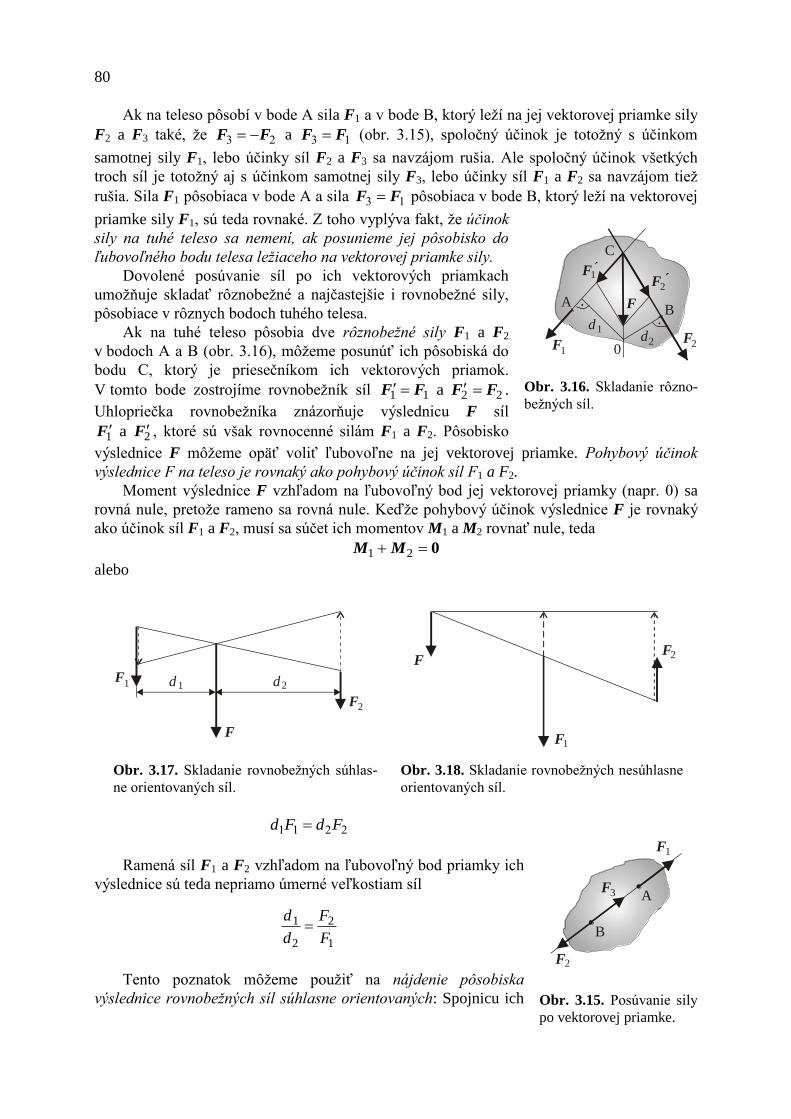
80
Ak na teleso pôsobí v bode A sila F1 a v bode B, ktorý leží na jej vektorovej priamke sily
F2 a F3 také, že 23 FF a 13 FF (obr. 3.15), spoločný účinok je totožný s účinkom
samotnej sily F1, lebo účinky síl F2 a F3 sa navzájom rušia. Ale spoločný účinok všetkých
troch síl je totožný aj s účinkom samotnej sily F3, lebo účinky síl F1 a F2 sa navzájom tiež
rušia. Sila F1 pôsobiaca v bode A a sila 13 FF pôsobiaca v bode B, ktorý leží na vektorovej
priamke sily F1, sú teda rovnaké. Z toho vyplýva fakt, že účinok
sily na tuhé teleso sa nemení, ak posunieme jej pôsobisko do
ľubovoľného bodu telesa ležiaceho na vektorovej priamke sily.
Dovolené posúvanie síl po ich vektorových priamkach
umožňuje skladať rôznobežné a najčastejšie i rovnobežné sily,
pôsobiace v rôznych bodoch tuhého telesa.
Ak na tuhé teleso pôsobia dve rôznobežné sily F1 a F2
v bodoch A a B (obr. 3.16), môžeme posunúť ich pôsobiská do
bodu C, ktorý je priesečníkom ich vektorových priamok.
V tomto bode zostrojíme rovnobežník síl 2211 a FFFF .
Uhlopriečka rovnobežníka znázorňuje výslednicu F síl
21 a FF , ktoré sú však rovnocenné silám F1 a F2. Pôsobisko
výslednice F môžeme opäť voliť ľubovoľne na jej vektorovej priamke. Pohybový účinok
výslednice F na teleso je rovnaký ako pohybový účinok síl F1 a F2.
Moment výslednice F vzhľadom na ľubovoľný bod jej vektorovej priamky (napr. 0) sa
rovná nule, pretože rameno sa rovná nule. Keďže pohybový účinok výslednice F je rovnaký
ako účinok síl F1 a F2, musí sa súčet ich momentov M1 a M2 rovnať nule, teda
0 21 MM
alebo
2211 FdFd
Ramená síl F1 a F2 vzhľadom na ľubovoľný bod priamky ich
výslednice sú teda nepriamo úmerné veľkostiam síl
1
2
2
1
F
F
d
d
Tento poznatok môžeme použiť na nájdenie pôsobiska
výslednice rovnobežných síl súhlasne orientovaných: Spojnicu ich
Obr. 3.15. Posúvanie sily
po vektorovej priamke.
Obr. 3.16. Skladanie rôzno-
bežných síl.
Obr. 3.17. Skladanie rovnobežných súhlas-
ne orientovaných síl.
Obr. 3.18. Skladanie rovnobežných nesúhlasne
orientovaných síl.
F
F
F
1
2
A
B
F
F
F
1
2
3
F
F
F
1
2
d d1 2
AB
C
0
F
F
FF
F
dd
1
1
1
2
22
´´
.
.

81
pôsobísk rozdelíme v obrátenom pomere k ich veľkostiam. Na obr.
3.17 je znázornená grafická konštrukcia umožňujúca nájsť
pôsobisko výslednice: Na vektorovú priamku druhej sily nanesieme
v obrátenom smere úsečku rovnú veľkosti prvej sily a na vektorovú
priamku prvej sily v smere druhej sily úsečku rovnú veľkosti druhej
sily. Priesečník spojnice koncových bodov úsečiek so spojnicou
pôsobísk skladaných síl je pôsobisko výslednice. Vidíme, že
pôsobisko leží vnútri spojnice pôsobísk pôvodných síl. Veľkosť
výslednice je rovná súčtu veľkostí skladaných síl
Na obr. 3.18 je na základe rovnakej úvahy vykonaná
konštrukcia výslednice dvoch rovnobežných síl nesúhlasne orientovaných. Výslednica dvoch
rovnobežných nesúhlasne orientovaných síl je súhlasne orientovaná s väčšou silou a jej
veľkosť sa rovná rozdielu veľkostí zložiek. Jej pôsobisko leží na predĺženej spojnici pôsobísk
síl F1 a F2.
Dvojicu síl tvoria dve rovnako veľké nesúhlasne rovnobežné sily F F1 2 neležiace na
tej istej vektorovej priamke (obr. 3.19). Dvojica síl spôsobuje otáčanie tuhého telesa. Moment
dvojice síl DM je rovnaký vzhľadom na ľubovoľnú os kolmú na rovinu dvojice síl a jeho
veľkosť je daná súčinom ramena d dvojice síl a jednej sily
FdM .D (3.20)
Rovnobežné sily nemožno zložiť, keď tvoria dvojicu síl.
Podobne nemožno zložiť ani dve sily mimobežné.
Možno ukázať, že ľubovoľný počet síl účinkujúcich na tuhé
teleso môžeme nahradiť jedinou výslednicou F, pôsobiacou
v ľubovoľne zvolenom bode telesa a rovnajúcou sa ich
vektorovému súčtu a jedinou dvojicou s momentom DM , ktorý sa
rovná súčtu momentov všetkých účinkujúcich síl vzhľadom na
zvolené pôsobisko sily F
i
ii
i
i FrMFF D ; (3.21)
3.8 Hmotný stred telesa. Pohybové rovnice tuhého telesa
Ako sme už spomínali v predchádzajúcej časti, na tuhé teleso možno nazerať ako na
sústavu hmotných bodov s obrovskou hustotou bodov. So zreteľom na túto skutočnosť
prechádzame od diskrétnej predstavy ku kontinuálnej predstave tuhého telesa, čo sa prejaví
v tom, že pri výpočtoch používame integrálny počet: Namiesto hmotného bodu budeme
používať „kúštik“ telesa (hmotnostný element), ktorý má z makro-pohľadu maličkú hmotnosť
md , ktorej zodpovedá maličký objem ,dV ale so zreteľom na stavebné častice telesa (atómy,
molekuly) musí byť dostatočne veľký aby reprezentoval priemerné fyzikálne vlastnosti látky,
z ktorej teleso pozostáva. Taký objem nazývame fyzikálne malý (na rozdiel od matematiky,
kde veličiny typu md , Vd sú nekonečne malé). Teda naše tuhé teleso bude teraz pozostávať
z malých častí s objemom Vd a hmotnosťou md . Pri výpočte fyzikálnych veličín týkajúcich
sa telesa nebudeme teraz používať sumáciu, ale integráciu. Až na tento rozdiel, môžeme bezo
zbytku aplikovať na tuhé teleso vzťahy a rovnice odvodené pre sústavu hmotných bodov.
Polohový vektor, resp. súradnice hmotného stredu telesa počítame podľa vzťahov
Obr. 3.19. Dvojica síl.
Obr. 3.20. Pri výpočte
polohového vektora hmot-
ného stredu telesa považu-
jeme hmotnosť za spojito
rozloženú.
dV
dm
x y
z
0
r
.
F
F
1
2
d

82
V
m
mV
mm
m
d 1
d
d
T r
r
r (3.22)
resp.
d 1
; d 1
; d 1
m
T
m
T
m
T mzm
zmym
ymxm
x
kde m je hmotnosť telesa, r – polohový vektor hmotnostného elementu, md – hmotnosť
elementu, – hustota látky, z ktorej je teleso zhotovené, Vd – objem elementu, x, y, z –
súradnice elementu, obr. 3.20.
Ďalej, pohybové rovnice tuhého telesa majú taký istý tvar ako pohybové rovnice sústavy
hmotných bodov (pozri (3.6) a (3.18)). I. pohybová
rovnica má tvar
dt
pF
d
a II. pohybová rovnica tvar
td
dLM
V týchto rovniciach F je výslednica všetkých vonkajších
síl pôsobiacich na tuhé teleso,
M – výslednica momentov vonkajších síl pôsobiacich na
teleso, p – celková hybnosť telesa,
L – celkový moment hybnosti telesa a pd , Ld sú zmeny
hybnosti a momentu hybnosti telesa za dobu td .
Príklad 3.3. Vypočítame polohu hmotného stredu
drôtu ohnutého do tvaru trištvrtekruž-nice s polomerom R.
Riešenie: Pre x-ovú súradnicu hmotného stredu platí
m
mxm
x d 1
T (P1)
Hmotnostný element dm možno vyjadriť takto
d π3
2d
π3
2d
π24
3d d
mR
R
m
R.
mm
V tomto vzťahu sme dĺžku „oblúčika“ d , pozri obr. 3.21, vyjadrili pomocou polomeru R a
uhla d : d d R .
x-ovú súradnicu hmotnostného elementu dm možno vyjadriť ako cos Rx . Po dosadení do
vzťahu (P1) dostaneme, že
Obr. 3.21. K výpočtu hmotného
stredu drôtu ohnutého do tvaru
trištvrtekružnice.
dm
d
xxR
y
y
0
m~dl

83
π3
201
π3
2
π3
2d cos
π3
21 π0
π
0
T2
32
3
RRsin
RmR
mx
Podobne, pre y-ovú súradnicu, keď si uvedomíme, že
sin Ry , dostaneme
π3
210
π3
2
π3
2d sin
π3
2 π0
π
0
T2
32
3
RRcos
RRy
Súradnice ťažiska drôtu ohnutého do tvaru trištvrtekružnice
sú: .;π3
2
π3
2TT
Ry
Rx
Príklad 3.4. Vypočítame polohu ťažiska polgule, ktorá má hmotnosť m a polomer R.
Riešenie: Je zrejmé, že pri zvolenej súradnicovej sústave (obr. 3.22) platí .0TT zx
Ypsilonovú súradnicu ťažiska vypočítame podľa vzťahu
m
mym
y d 1
T (P1)
Hmotnostný element dm vyjadríme pomocou hustoty ,Vm kde V je objem polgule,
3
32 πRV , a pomocou objemu elementu yyRyrV d πd πd 222 . Teda
yyRR
myyR.
R
mVm d
2
3d π
πd d 22
3
22
3
32
Dosadíme vyjadrenie hmotnostného elementu do vzťahu (P1) a vypočítame Ty
4
22
3d d
2
3d
2
31
0
4
0
22
30 0 0
32
3
22
3T
RRR R Ryy
RR
yyyyRR
yyRyR
m
my
RRR
R 8
3
422
3 44
3
Súradnice ťažiska polgule sú: .; Ryzx8
3 0 TTT
Obr. 3.22. K výpočtu hmotného
stredu polgule.
0
R
r
dy
y
y
x
dm ~
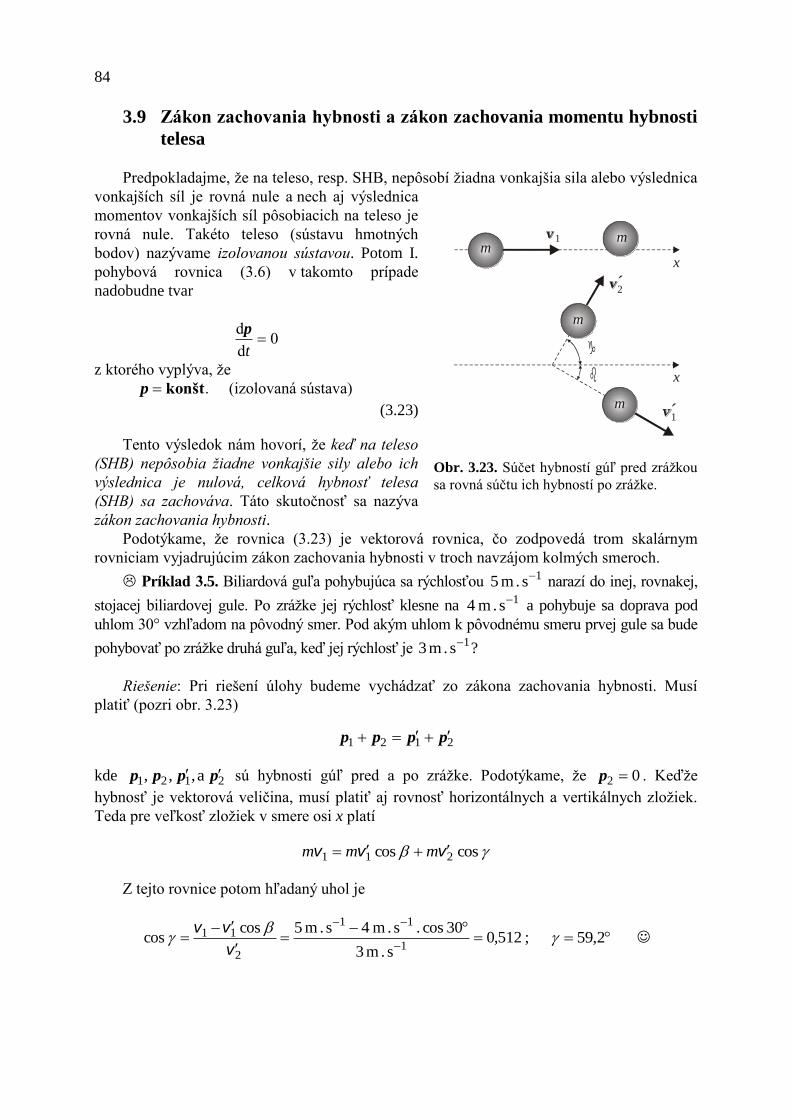
84
3.9 Zákon zachovania hybnosti a zákon zachovania momentu hybnosti
telesa
Predpokladajme, že na teleso, resp. SHB, nepôsobí žiadna vonkajšia sila alebo výslednica
vonkajších síl je rovná nule a nech aj výslednica
momentov vonkajších síl pôsobiacich na teleso je
rovná nule. Takéto teleso (sústavu hmotných
bodov) nazývame izolovanou sústavou. Potom I.
pohybová rovnica (3.6) v takomto prípade
nadobudne tvar
0d
d
t
p
z ktorého vyplýva, že
konštp . (izolovaná sústava)
(3.23)
Tento výsledok nám hovorí, že keď na teleso
(SHB) nepôsobia žiadne vonkajšie sily alebo ich
výslednica je nulová, celková hybnosť telesa
(SHB) sa zachováva. Táto skutočnosť sa nazýva
zákon zachovania hybnosti.
Podotýkame, že rovnica (3.23) je vektorová rovnica, čo zodpovedá trom skalárnym
rovniciam vyjadrujúcim zákon zachovania hybnosti v troch navzájom kolmých smeroch.
Príklad 3.5. Biliardová guľa pohybujúca sa rýchlosťou 1s . m 5 narazí do inej, rovnakej,
stojacej biliardovej gule. Po zrážke jej rýchlosť klesne na 1s . m 4 a pohybuje sa doprava pod
uhlom 30° vzhľadom na pôvodný smer. Pod akým uhlom k pôvodnému smeru prvej gule sa bude
pohybovať po zrážke druhá guľa, keď jej rýchlosť je 1s . m 3 ?
Riešenie: Pri riešení úlohy budeme vychádzať zo zákona zachovania hybnosti. Musí
platiť (pozri obr. 3.23)
2121 pppp
kde 2121 a , , , pppp sú hybnosti gúľ pred a po zrážke. Podotýkame, že 02 p . Keďže
hybnosť je vektorová veličina, musí platiť aj rovnosť horizontálnych a vertikálnych zložiek.
Teda pre veľkosť zložiek v smere osi x platí
cos cos 211 vvv mmm
Z tejto rovnice potom hľadaný uhol je
512,0s . m 3
30 cos . s . m 4s . m 5 cos cos
1
11
2
11
v
vv ; 2,59
Obr. 3.23. Súčet hybností gúľ pred zrážkou
sa rovná súčtu ich hybností po zrážke.
mm
m
m
2
´
x
x
1
1

85
Keď je teleso (SHB) izolované, II. pohybová rovnica (3.18) má tiež tvar s nulovou pravou
stranou
0d
d
t
L
z ktorého vyplýva, že
konštL . (izolovaná sústava) (3.24)
Tento výsledok hovorí, že keď výslednica momentov vonkajších síl pôsobiacich na teleso
(SHB) sa rovná nule, celkový moment hybnosti telesa
(SHB) sa zachováva. Tento fakt sa nazýva zákon
zachovania momentu hybnosti. Znova si treba
uvedomiť, že moment hybnosti je vektorová veličina,
a preto túto skutočnosť treba brať do úvahy pri
aplikácii tohto zákona.
Zákon zachovania momentu hybnosti hral
dôležitú úlohu pri vzniku vesmírnych objektov –
galaxií a slnečných sústav. Tieto vznikli z rozsiahleho
zhluku malinkých prachových čiastočiek. Zhluk sa
vplyvom gravitačných síl zmršťoval, tým sa
zväčšovala jeho hustota a teplota a postupne sa
zväčšovala jeho rýchlosť otáčania. Všetky tieto zmeny
stavu zhluku sú dôsledkom platnosti elementárnych
fyzikálnych zákonov. Ak rovnaká hmotnosť zaujíma
stále menší objem, vedie to nutne k narastaniu hustoty.
Súčasne sa však zvyšuje tlak vnútri zhluku, čo má za následok zvýšenie teploty. Ak sa
pôvodný zhluk otáčal v priestore pomerne pomaly, potom pri zmršťovaní sa muselo v
dôsledku zákona zachovania momentu hybnosti otáčanie zrýchľovať. Tým sa zväčšovala
odstredivá sila, takže pôvodne chaotický zhluk sa postupne zmenil na pomerne pravidelný
rotujúci disk, ktorý je uprostred najhrubší a smerom k okrajom sa stenčuje.
Príklad 3.6. Na meranie rýchlosti projektilu (náboja) sa používa balistické kyvadlo,
obr. 3.24. Projektil, ktorý narazí do dreveného bloku a uviazne v ňom má hmotnosť 12 g a blok
5 kg. Dĺžka závesu kyvadla je 350 mm. Po náraze sa záves vychýlil o uhol 28,5°. Aká bola
rýchlosť projektilu?
Riešenie: Pri riešení úlohy budeme vychádzať zo zákona zachovania hybnosti. Blok
a projektil budeme považovať za izolovanú sústavu. Potom platí
vvv bpbbpp mmmm (P1)
kde bp a mm sú hmotnosti projektilu a bloku, bp a vv – rýchlosti projektilu a bloku pred
zrážkou a v – rýchlosť bloku s uviaznutým projektilom tesne po zrážke. Avšak 0 b v .
Druhým zákonom, ktorý pri riešení použijeme je zákon zachovania mechanickej energie
bloku s uviaznutým projektilom
p2k2p1k1 EEEE (P2)
Obr. 3.24. Balistické kyvadlo slúži na
meranie rýchlosti projektilov.
mm
p
p b
b
h
l
l cos
1
2

86
V tomto vzťahu k1E je kinetická energia bloku, ktorú nadobudne v okamihu uviaznutia
projektilu (v polo-
he 1). Táto sa mení postupne na potenciálnu energiu, až pokým v polohe 2 má blok
s projektilom len potenciálnu energiu. Teda 0k2 E a položíme tiež 0p1 E , t.zn., že
potenciálnu energiu
v polohe 2 počítame vzhľadom na polohu 1. Keď do rovnice (P2) dosadíme za
2bp2
1k1 vmmE a za ,ghmmE bpp2 kde, ako vidno z obr. 3.23, cos h ,
dostaneme rovnice
vv bppp mmm
cos 1 2
1bp
2bp gmmmm v
ktorých riešením získame vzťah na určenie rýchlosti projektilu
kg 0,012
28,5 cos-1 m 0,35 s . m 9,81 . 2kg 5 kg 0,01212 2
p
bpp
.cos
m
gmm v
1s . m 381
3.10 Podmienky rovnováhy tuhého telesa
Keď hmotný bod zostáva v pokoji v inerciálnej súradnicovej sústave, jeho zrýchlenie je
nulové a z Newtonovho zákona sily vyplýva, že výsledná sila pôsobiaca naň sa rovná nule,
0i
iF . Toto je nutná (a postačujúca) podmienka pre statickú rovnováhu hmotného bodu.
V realite máme do činenia skôr s telesami než s časticami. Čo teda budeme rozumieť pod
statickou rovnováhou telesa? Teleso je v statickej rovnováhe, ak jeho každý bod je v pokoji.
Avšak, ak je teleso v statickej rovnováhe v jednej inerciálnej súradnicovej sústave, vzhľadom
na inú sa môže pohybovať konštantnou rýchlosťou. Preto my budeme v ďalšom predpokladať,
že teleso vzhľadom na našu súradnicovú sústavu je v pokoji.
Z I. pohybovej rovnice vyplýva, že keď výslednica vonkajších síl pôsobiacich na teleso sa
rovná nule, teda keď
i
i 0FF (3.25)
teleso si zachováva svoju hybnosť. My sme však predpokladali, že teleso je v pokoji, teda
jeho hybnosť je rovná nule. Podmienka (3.25) je podmienkou translačnej rovnováhy – aby sa
teleso neposúvalo.
Podmienka rovnováhy (3.25) prepísaná do skalárneho tvaru je
0 0 0 i
zi
i
yi
i
xi F,F,F (3.26)
Teleso by však mohlo ešte rotovať okolo osi prechádzajúcej hmotným stredom. Aby
k tomu neprišlo, je nutné splniť aj druhú podmienku, a to, aby výslednica momentov
vonkajších síl vzhľadom na ľubovoľný bod bola rovná nule

87
0i
iMM (3.27)
Ak sily pôsobia len v jednej rovine, napr. xy, podmienky rovnováhy sa zredukujú na
nasledujúce tri algebraické rovnice
0 0 0 i
zi
i
yi
i
xi M,F,F (3.28)
Príklad 3.7. Hrubá drevená doska s hustotou 3m . kg 600 a rozmermi 4 cm 30 cm
300 cm je uložená na dvoch podperách („kozách“) tak, že jedna podpera je na kraji dosky a
druhá je vo vzdialenosti 100 cm od druhého konca dosky. Teda vzdialenosť podpier je 200 cm.
Akú minimálnu hmotnosť musí mať závažie, ktoré položíme na neprečnievajúci kraj dosky,
aby sa na druhý, prečnievajúci koniec dosky mohol postaviť človek hmotnosti 80 kg? Aké sily
pôsobia na podpery?
Riešenie: Pri hľadaní minimálnej hmotnosti závažia budeme vychádzať z podmienky
rovnováhy: Súčet momentu tiaže závažia a momentu tiaže dosky vzhľadom na os
prechádzajúcu podperou bližšou k prečnievajúcemu koncu dosky (obr. 3.25) sa musí rovnať
momentu tiaže človeka vzhľadom na tú istú os. V tomto prípade sa podpera pri
neprečnievajúcom konci dosky neuplatňuje – nepôsobí na dosku žiadnou silou. Teda
02
1D2
gbmbgmgam
Z tejto rovnice vyjadríme hľadanú hmotnosť závažia m2
kg 634m 2
m 12
m 3 . kg 21,6m 1 . kg 80
2D1
2 ,
a
bmbm
m
kde hmotnosť dosky sme určili podľa vzťahu
kg 21,6m 3 . m 0,3 . m 0,04 .m . kg 600 3D hsVm
Minimálna hmotnosť závažia je 34,6 kg.
Na podperu na kraji dosky nepôsobí v tomto prípade žiadna sila. Teda
FR2 0 N
Sila pôsobiaca na druhú podperu
N 1363s . m 9,81 . kg 34,6+kg 21,6+kg 80=g 22D1R1 mmmF
Na podperu na kraji dosky nepôsobí
žiadna sila a na druhú podperu pôsobí sila
1363 N.
Obr. 3.25. Aby človek stojaci na prečnievajúcom
konci dosky nespadol, musíme druhý koniec zaťažiť.
mm
m g
gga b
l
T
FF
2
1
R1R2D
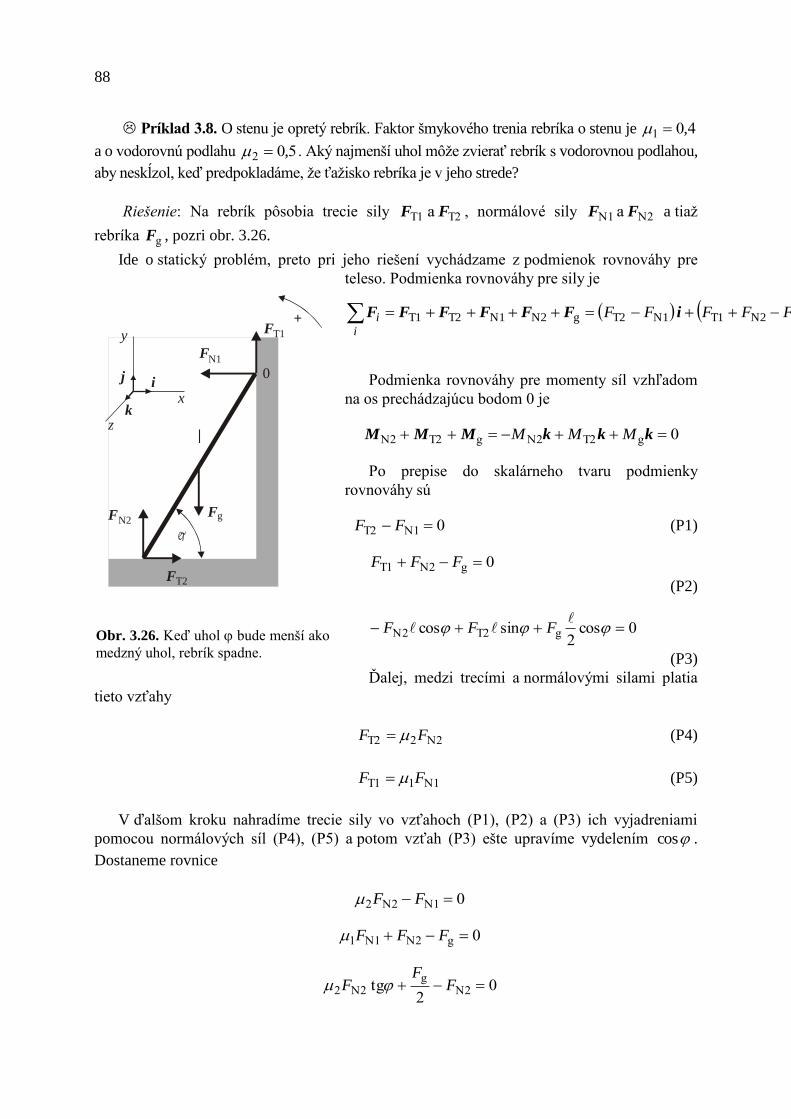
88
Príklad 3.8. O stenu je opretý rebrík. Faktor šmykového trenia rebríka o stenu je 401 ,
a o vodorovnú podlahu 502 , . Aký najmenší uhol môže zvierať rebrík s vodorovnou podlahou,
aby neskĺzol, keď predpokladáme, že ťažisko rebríka je v jeho strede?
Riešenie: Na rebrík pôsobia trecie sily T2T1 a FF , normálové sily N2N1 a FF a tiaž
rebríka gF , pozri obr. 3.26.
Ide o statický problém, preto pri jeho riešení vychádzame z podmienok rovnováhy pre
teleso. Podmienka rovnováhy pre sily je
0 gN2T1N1T2gN2N1T2T1 jiFFFFFF FFFFFi
i
Podmienka rovnováhy pre momenty síl vzhľadom
na os prechádzajúcu bodom 0 je
0gT2N2gT2N2 kkkMMM MMM
Po prepise do skalárneho tvaru podmienky
rovnováhy sú
0N1T2 FF (P1)
0gN2T1 FFF
(P2)
0cos 2
sin cos gT22N
FFF
(P3)
Ďalej, medzi trecími a normálovými silami platia
tieto vzťahy
N22T2 FF (P4)
N11T1 FF (P5)
V ďalšom kroku nahradíme trecie sily vo vzťahoch (P1), (P2) a (P3) ich vyjadreniami
pomocou normálových síl (P4), (P5) a potom vzťah (P3) ešte upravíme vydelením cos .
Dostaneme rovnice
0N1N22 FF
0gN2N11 FFF
02
tg N2g
N22 FF
F
Obr. 3.26. Keď uhol bude menší ako
medzný uhol, rebrík spadne.
F
F
F
F
F
N1
N2
T1
T2
g
l
x
y
0
+
z
ij
k
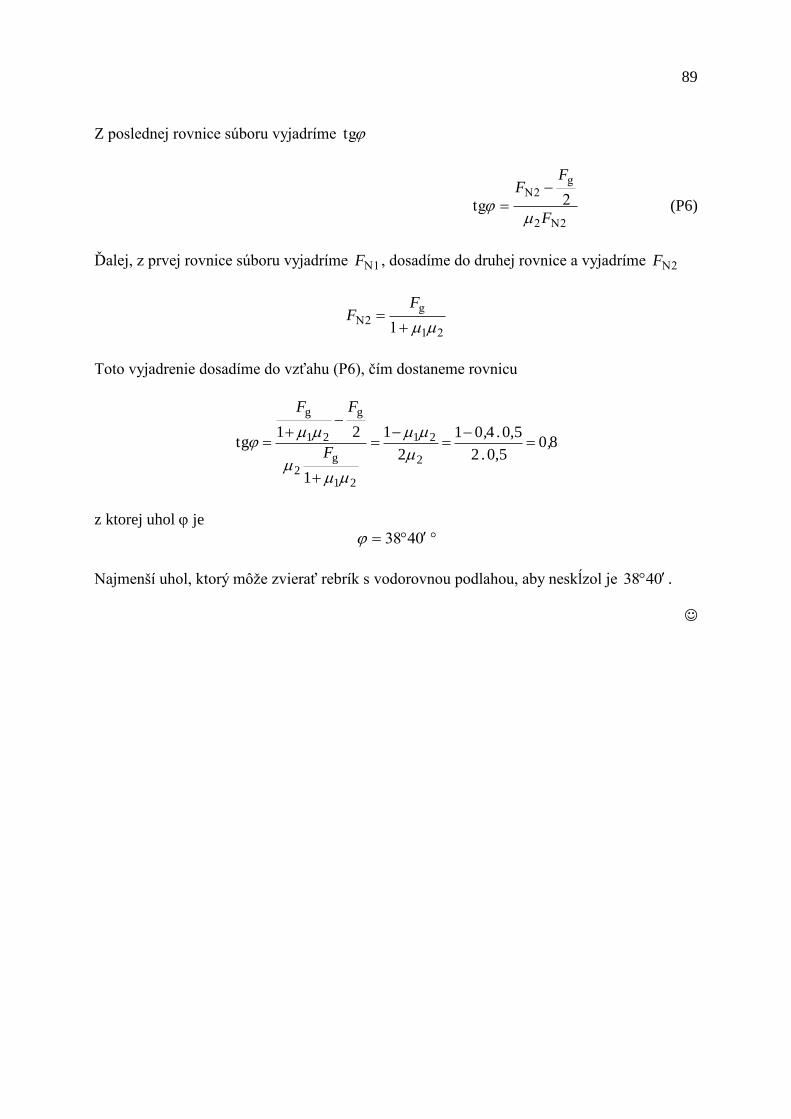
89
Z poslednej rovnice súboru vyjadríme tg
N22
gN2
2tgF
FF
(P6)
Ďalej, z prvej rovnice súboru vyjadríme N1F , dosadíme do druhej rovnice a vyjadríme N2F
21
gN2
1
FF
Toto vyjadrenie dosadíme do vzťahu (P6), čím dostaneme rovnicu
800,5 . 2
0,5 . 401
2
1
1
21tg
2
21
21
g2
g
21
g
,,
F
FF
z ktorej uhol je
0438 °
Najmenší uhol, ktorý môže zvierať rebrík s vodorovnou podlahou, aby neskĺzol je 0438 .

89
3.11 Pohyb tuhého telesa okolo pevnej osi
Rotácia tuhého telesa okolo pevnej osi má veľký praktický význam, veď väčšina
strojných súčastí vykonáva práve takýto pohyb. V ďalšom si odvodíme rovnice, ktoré tento
pohyb opisujú.
Uvažujme tuhé teleso, ktoré sa otáča okolo nehybnej osi (obr. 3.27) uhlovou rýchlosťou
proti smeru pohybu hodinových ručičiek. Použijeme predstavu, že teleso pozostáva
z množstva hmotných bodov – hmotnostných elementov s hmotnosťou dm. Pri otáčaní telesa
sa pohybujú všetky jeho hmotnostné elementy po kružniciach, ktoré majú svoje stredy na osi
otáčania. Moment hybnosti dL vybraného hmotnostného elementu vzhľadom na bod 0
nachádzajúci sa na osi je
mmmmm d d d d d vvvv rrrrrL
V tomto vzťahu mr je polohový vektor hmotnostného elementu dm, r – zložka polohového
vektora v smere osi a r – zložka polohového vektora kolmá na os.
Z hľadiska rotácie telesa okolo pevnej osi je dôležitá zložka momentu hybnosti
rovnobežná s osou rotácie. Označíme ju dL0 a možno ju vyjadriť ako
md dd 0 v rννLL (3.29)
lebo vektor md vr je kolmý na os a jeho zložka do smeru
osi je teda nulová. Vektor je jednotkový vektor v smere osi.
Vzťah (3.29) môžeme ďalej upraviť takto
mrmrmrm d d d d d 220 ωννrL vv
Moment hybnosti L0 celého telesa vzhľadom na os
dostaneme integráciou
mm
Imr ωωLL d d 200 (3.30)
kde
m
mrI d2 (3.31)
je moment zotrvačnosti telesa vzhľadom na os. Rovnica (3.30) je platná pre ľubovoľné tuhé
teleso, ale vzťahuje sa len na zložku momentu hybnosti spadajúcu do smeru osi.
Ak je však teleso symetrické vzhľadom na os rotácie, potom celkový moment hybnosti L
je rovný L0. Vysvetlíme si to pomocou obr. 3.28. Uvažujme dva hmotnostné elementy telesa
s hmotnosťami ji mm dd symetricky uložené vzhľadom na os. Radiálne zložky ich
momentov hybnosti rjri LL da d majú rovnakú veľkosť a opačný smer. Keďže v tuhom telese,
symetrickom vzhľadom na os, existuje vždy ku vybranému hmotnostnému elementu jeho
symetrický proťajšok, výsledná radiálna zložka momentu hybnosti telesa sa rovná nule a
moment hybnosti telesa L je rovnobežný s osou a platí
ωL I (3.32)
Obr. 3.27. Pri otáčaní telesa
sa pohybujú všetky jeho hmot-
nostné elementy po kružni-
ciach, ktoré majú svoje stredy
na osi otáčania.
r
r.
L
L0
rv
0
.
. dmm

90
Ak teleso nie je symetrické vzhľadom na os, moment hybnosti L nie je paralelný s osou a
smer L bude pri otáčaní sa telesa tiež „rotovať“. Napríklad, ak automobilové koleso nie je
„vyvážené“, pri jazde (teda pri otáčaní sa) bude kmitať a bude
namáhať ložiská, na ktorých je uložené.
Vzťah (3.30), resp. (3.32) môžeme upraviť použitím
vzťahu (3.18) takto
αω
ωL
M It
IItt
d
d
d
d
d
d
Rovnicu
αM I (3.33)
nazývame pohybovou rovnicou telesa uloženého na pevnej
osi. Podotýkame, že v tejto rovnici i
iMM je výslednica
momentov vonkajších síl vzhľadom na os a moment
zotrvačnosti telesa I musí byť tiež vztiahnutý na tú istú os.
Táto rovnica je rotačnou analógiou pohybovej rovnice
translačného pohybu aF m . Z tejto analógie môžeme tiež
ľahšie pochopiť fyzikálny význam momentu zotrvačnosti. Tak, ako je hmotnosť mierou
zotrvačnosti telesa pri translačnom pohybe, je moment zotrvačnosti mierou zotrvačnosti telesa
pri rotačnom pohybe – pri danom momente vonkajších síl bude mať teleso s väčším
momentom zotrvačnosti menšie uhlové zrýchlenie než teleso s menším momentom
zotrvačnosti.
3.12 Moment zotrvačnosti. Steinerova veta
Moment zotrvačnosti telesa sme zaviedli v predchádzajúcej časti, kde sme vysvetlili aj
jeho fyzikálny význam. V tejto časti sa zameriame viac na techniku výpočtu momentu
zotrvačnosti.
Moment zotrvačnosti tuhého telesa počítame podľa vzťahu
m V
VrmrI d d 22 (3.34)
kde r je kolmá vzdialenosť hmotnostného elementu dm telesa od osi, vzhľadom na ktorú
moment zotrvačnosti určujeme, – hustota a dV – objem hmotnostného elementu. Jednotkou
momentu zotrvačnosti je .2m . kg 1
Keď môžeme rozmery telesa zanedbať, stretneme sa s pojmom moment zotrvačnosti
hmotného bodu. Ten vypočítame podľa vzťahu
2mrI
alebo ak ide o sústavu hmotných bodov podľa vzťahu
i
iirmI 2
Obr. 3.28. Radiálne zložky
momentov hybnosti dLi a dLj
majú rovnakú veľkosť, ale
opačný smer.
dm
dmjj
ji
i idL
dL
rrmjmi
0
os
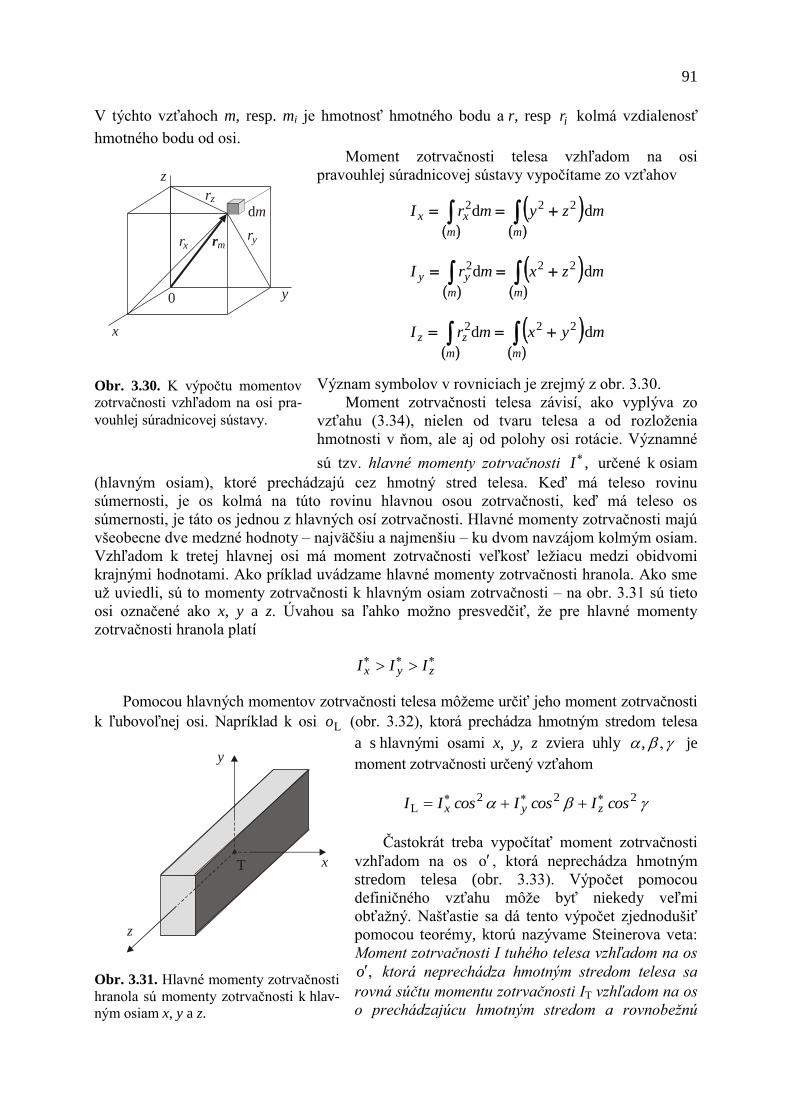
91
V týchto vzťahoch m, resp. mi je hmotnosť hmotného bodu a r, resp ir kolmá vzdialenosť
hmotného bodu od osi.
Moment zotrvačnosti telesa vzhľadom na osi
pravouhlej súradnicovej sústavy vypočítame zo vzťahov
mzymrI
mm
xx d d 222
mzxmrI
mm
yy d d 222
myxmrI
mm
zz d d 222
Význam symbolov v rovniciach je zrejmý z obr. 3.30.
Moment zotrvačnosti telesa závisí, ako vyplýva zo
vzťahu (3.34), nielen od tvaru telesa a od rozloženia
hmotnosti v ňom, ale aj od polohy osi rotácie. Významné
sú tzv. hlavné momenty zotrvačnosti ,I určené k osiam
(hlavným osiam), ktoré prechádzajú cez hmotný stred telesa. Keď má teleso rovinu
súmernosti, je os kolmá na túto rovinu hlavnou osou zotrvačnosti, keď má teleso os
súmernosti, je táto os jednou z hlavných osí zotrvačnosti. Hlavné momenty zotrvačnosti majú
všeobecne dve medzné hodnoty – najväčšiu a najmenšiu – ku dvom navzájom kolmým osiam.
Vzhľadom k tretej hlavnej osi má moment zotrvačnosti veľkosť ležiacu medzi obidvomi
krajnými hodnotami. Ako príklad uvádzame hlavné momenty zotrvačnosti hranola. Ako sme
už uviedli, sú to momenty zotrvačnosti k hlavným osiam zotrvačnosti – na obr. 3.31 sú tieto
osi označené ako x, y a z. Úvahou sa ľahko možno presvedčiť, že pre hlavné momenty
zotrvačnosti hranola platí
zyx III
Pomocou hlavných momentov zotrvačnosti telesa môžeme určiť jeho moment zotrvačnosti
k ľubovoľnej osi. Napríklad k osi Lo (obr. 3.32), ktorá prechádza hmotným stredom telesa
a s hlavnými osami x, y, z zviera uhly , , je
moment zotrvačnosti určený vzťahom
222L cosIcosIcosII zyx
Častokrát treba vypočítať moment zotrvačnosti
vzhľadom na os o , ktorá neprechádza hmotným
stredom telesa (obr. 3.33). Výpočet pomocou
definičného vzťahu môže byť niekedy veľmi
obťažný. Našťastie sa dá tento výpočet zjednodušiť
pomocou teorémy, ktorú nazývame Steinerova veta:
Moment zotrvačnosti I tuhého telesa vzhľadom na os
,o ktorá neprechádza hmotným stredom telesa sa
rovná súčtu momentu zotrvačnosti IT vzhľadom na os
o prechádzajúcu hmotným stredom a rovnobežnú
Obr. 3.30. K výpočtu momentov
zotrvačnosti vzhľadom na osi pra-
vouhlej súradnicovej sústavy.
Obr. 3.31. Hlavné momenty zotrvačnosti
hranola sú momenty zotrvačnosti k hlav-
ným osiam x, y a z.
rr r
r
m
dm
x
xy
y
z
z
0
T x
y
z

92
s osou o a súčinu hmotnosti telesa m a štvorca vzdialenosti obidvoch osí (a2)
2T maII (3.35)
Steinerovu vetu odvodíme nasledujúcim výpočtom. Moment zotrvačnosti telesa
vzhľadom na os o (obr. 3. 33) podľa definície možno vyjadriť
2T
22222 d 2ddd 2d maImmamrmramrI arar
Pri odvádzaní sme použili túto úpravu: 222 2 rar arrararr a ďalej
sme uvážili, že 0d 2d 2 mm raar , čo vyplýva zo vzťahu pre výpočet polohového
vektora hmotného stredu 0dd T mmrr . Polohový vektor hmotného stredu vzhľadom
na hmotný stred sa rovná nule a preto sa musí nule rovnať tiež md r .
Na obr. 3.34 sú uvedené momenty zotrvačnosti niektorých rovnorodých telies vzhľadom
na vyznačené osi.
Obr. 3.32. Pomocou hlavných
momentov zotrvačnosti možno
určiť moment zotrvačnosti k ľu-
bovoľnej osi prechádzajúcej hmot-
ným stredom telesa.
Obr. 3.33. Moment zotrvačnosti
telesa vzhľadom na os o´ môžeme
počítať pomocou Steinerovej vety.
Obr. 3.34. Momenty zotrvačnosti niektorých rovnorodých telies:
a) tenká obruč, b) kruhová doska (valec), c) tenká tyč, d) plná guľa.
x
y
z
T
oL
r
rr
0
00
l
a)
c)
b
d)
I mr = 00
22 I = 1_2
mr0
0
2
2I =
25_
mrI = 1
12 m l 2
)

93
Príklad 3.9. Aký je moment zotrvačnosti homogénnej tyče dĺžky a hmotnosti m
vzhľadom na os kolmú na tyč a prechádzajúcu a) stredom tyče, b) koncovým bodom tyče?
Riešenie: a) Moment zotrvačnosti
vzhľadom na os prechádzajúcu stredom
tyče, obr. 3.35a
xm
xmxI
m
d d
2
2
22T
2
2
3
3
xm
233
12
1
2424
m
m
b) Moment zotrvačnosti vzhľadom na
os prechádzajúcu koncovým bodom tyče,
obr. 3.35b
2
0
3
0
22
3
1
3d d
mxm
xm
xmxI
m
Tento moment zotrvačnosti možno vypočítať aj pomocou Steinerovej vety
22
22T
3
1
212
1
mmmmaII
Príklad 3.10. Vypočítame moment zotrvačnosti homogénnej kruhovej dosky
s hmotnosťou m a polomerom R a hrúbkou h vzhľadom na os kolmú na dosku a prechádzajúcu jej
stredom, obr. 3.36.
Riešenie: Pri výpočte vychádzame z definície momentu
zotrvačnosti
mrI
m
d2
Hmotnostný element dm (pozri obr. 3.36) určíme takto
rrR
mrrh
hR
mVm d
2d π2
πdd
22
Po jeho dosadení do vzťahu pre moment zotrvačnosti dostaneme
24
20
3
20
2
2
2
1
4
2d
2d
2 mR
R
R
mrr
R
mrr
R
mrI
RR
Obr. 3.35. K výpočtu momentu zotrvačnosti tyče:
a) vzhľadom na os prechádzajúcu stredom, b) vzhľa-
dom na os prechádzajúcu koncovým bodom.
Obr. 3.36. K výpočtu mo-
mentu zotrvačnosti kruho-
vej dosky vzhľadom na os
kolmú na dosku a prechá-
dzajúcu jej stredom.
0
0
x
x
x
x
l
l
dx
dx
os
os
- /2l l /2
dm
dm
a)
b)
R
rdrdm
hr. h

94
Príklad 3.11. Aký veľký je orbitálny moment hybnosti Zeme a koľkokrát je väčší ako
moment hybnosti Zeme vzhľadom na vlastnú os otáčania?
Pozn.: Budeme predpokladať, že Zem obieha okolo Slnka po kruhovej dráhe a budeme ju
považovať za hmotný bod. Vzdialenosť Zeme od Slnka je približne 150 miliónov kilometrov.
Pri výpočte momentu hybnosti Zeme vzhľadom na jej os otáčania, považujeme Zem za
homogénnu guľu. Hmotnosť Zeme je kg. 10.98,5 24
Riešenie: Orbitálny moment hybnosti Zeme je moment hybnosti, ktorý má Zem pri
obiehaní okolo Slnka vzhľadom na os kolmú na rovinu jej trajektórie (podľa zadania
kružnice) a prechádzajúcu Slnkom. V tomto prípade považujeme Zem i Slnko za hmotné
body. Teda veľkosť orbitálneho momentu hybnosti Zeme vypočítame zo vzťahu
orb
2Z
orbZZorb
π2π2
T
rmr
T
rmL mvr
1240
21124
s .m . kg 10682s 60 . 60 . 24 . 365
m 1,5.10 . kg 5,98.10 . π2 .,
V tomto vzťahu mZ je hmotnosť Zeme, rv – rýchlosť, s ktorou Zem obieha okolo Slnka,
r – polomer jej kruhovej trajektórie a orbT – perióda obiehania Zeme okolo Slnka (1 rok).
Moment hybnosti Zeme vzhľadom na vlastnú os otáčania určíme z rovnice
os
2ZZos
π2
5
2
TRmIL .
12332624 s .m . kg 10087s 60 . 60 . 24
π2m 6,378.10 . kg 5,98.10
5
2 .,..
Vo vyššie uvedenom vzťahu I je moment zotrvačnosti Zeme (gule) vzhľadom na jej os
otáčania, osπ2 T – uhlová rýchlosť otáčania Zeme, Zm – hmotnosť Zeme, ZR – polomer
Zeme, osT – perióda otáčavého pohybu Zeme okolo vlastnej osi (1 deň).
Napokon vydelíme orbitálny moment hybnosti Zeme jej momentom hybnosti vzhľadom na
vlastnú os otáčania a tak zistíme koľkokrát je väčší
L
L
sorb
os
40 2
33 2 -1
6 . 10 kg.m
. 10 kg.m .s . 10
2 68
7 083 78
1, .
,,
Orbitálny moment hybnosti Zeme je krát-10783 6., väčší ako jej moment hybnosti vzhľadom
na vlastnú os otáčania.
Príklad 3.12. Dva kotúče, voľne uložené na hriadeli, sa otáčajú tak, že prvý vykoná za
minútu 840 otáčok a druhý 1200 otáčok (obr. 3.29). Hmotnosť prvého kotúča je 3 kg, druhého
2 kg a polomer obidvoch 10 cm. Kotúče pritlačíme k sebe, takže sa začnú otáčať rovnako.
Aký je počet otáčok, ktorými sa budú spojené kotúče otáčať, a to keď:

95
a) pred pritlačením sa otáčali rovnakým smerom,
b) pred pritlačením sa otáčali proti sebe. Treba tiež rozhodnúť, či sa spojené kotúče
v tomto prípade budú otáčať v pôvodnom smere prvého alebo druhého kotúča.
Riešenie: Pri riešení vychádzame zo
zákona zachovania momentu hybnosti
k21 LLL
kde 21 LL , sú momenty hybnosti kotúčov
pred pritlačením a kL je moment hybnosti
kotúčov po pritlačení. Ďalej si musíme
uvedomiť, že moment hybnosti je
vektorová veličina, a preto v prípade
b) budú mať pôvodné momenty hybnosti opačné smery.
a) V tomto prípade zákon zachovania momentu hybnosti v skalárnej forme má tvar
k21 LLL
A po dosadení za L I tvar
212211 IIII
Ďalej s22112
222
11 2π= a π2 ,π2 a 2
1 ,
2
1nnnRmIRmI ss , kde m1, m2 sú hmot-
nosti kotúčov, R ich polomer, ,1 ,2 – uhlové rýchlosti, n1s, n2s – počty otáčok za
sekundu (frekvencia) kotúčov pred pritlačením, sn – počet otáčok za sekundu spojených
kotúčov (po pritlačení). Potom
s2
22
12s2
21s2
1 2π 2
1+
2
1=π2
2
1+π2
2
1n.RmRmn.Rmn.Rm
Z toho počet otáčok za 1 sekundu spojených kotúčov
1-1-1
21
2s21s1s s 416
kg 2+kg 3
s 20 kg 2s 14 . kg 3+
,.
mm
nmnmn
Počet otáčok za minútu bude 60-krát väčší
-1-1sm min 984min 16,4 60 . 60 .nn
Kotúče sa budú otáčať tak, že za 1 min vykonajú 984 otáčok.
b) V tomto prípade zákon zachovania momentu hybnosti má v skalárnej forme tvar
L L L1 2 k
a teda
Obr. 3.29. Dva voľne rotujúce kotúče pritlačíme
k sebe. Po pritlačení sa budú otáčať rovnako.
n nn1 2
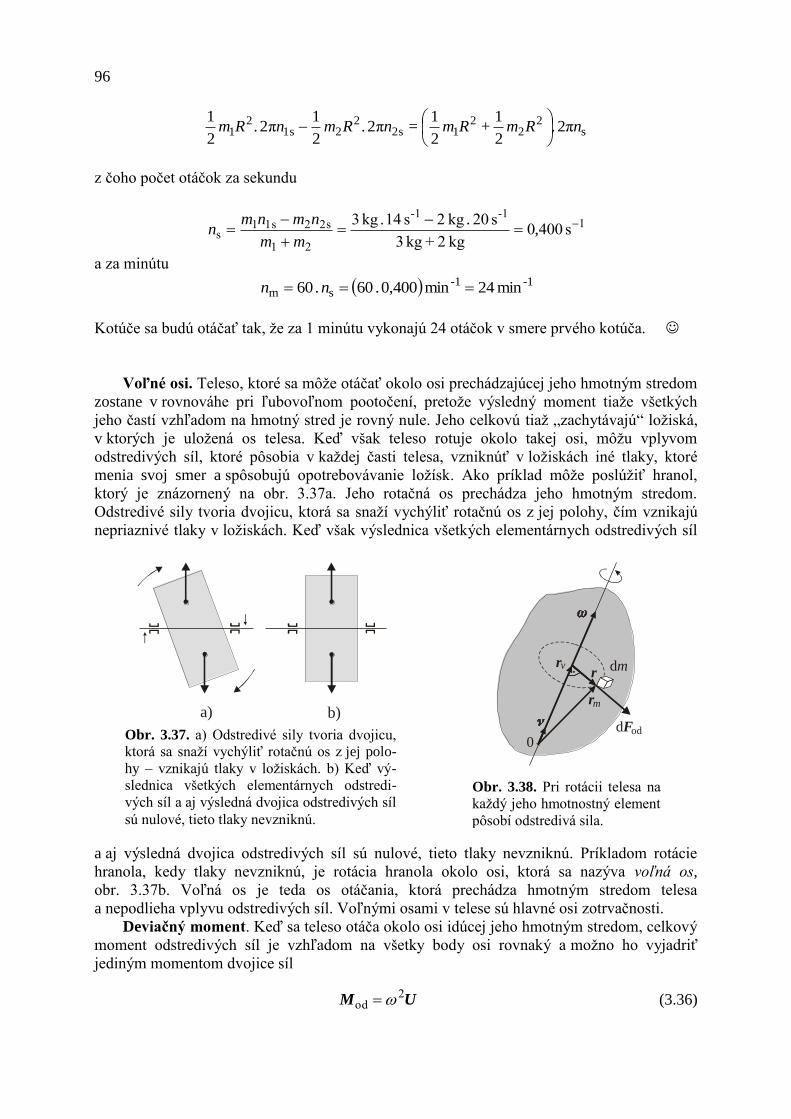
96
s2
22
12s2
21s2
1 2π 2
1+
2
1=π2
2
1π2
2
1n.RmRmn.Rmn.Rm
z čoho počet otáčok za sekundu
1-1-1
21
2s21s1s s 4000
kg 2+kg 3
s 20 kg 2s 14 . kg 3
,
.
mm
nmnmn
a za minútu
-1-1sm min 24min 0,400 60 . 60 .nn
Kotúče sa budú otáčať tak, že za 1 minútu vykonajú 24 otáčok v smere prvého kotúča.
Voľné osi. Teleso, ktoré sa môže otáčať okolo osi prechádzajúcej jeho hmotným stredom
zostane v rovnováhe pri ľubovoľnom pootočení, pretože výsledný moment tiaže všetkých
jeho častí vzhľadom na hmotný stred je rovný nule. Jeho celkovú tiaž „zachytávajú“ ložiská,
v ktorých je uložená os telesa. Keď však teleso rotuje okolo takej osi, môžu vplyvom
odstredivých síl, ktoré pôsobia v každej časti telesa, vzniknúť v ložiskách iné tlaky, ktoré
menia svoj smer a spôsobujú opotrebovávanie ložísk. Ako príklad môže poslúžiť hranol,
ktorý je znázornený na obr. 3.37a. Jeho rotačná os prechádza jeho hmotným stredom.
Odstredivé sily tvoria dvojicu, ktorá sa snaží vychýliť rotačnú os z jej polohy, čím vznikajú
nepriaznivé tlaky v ložiskách. Keď však výslednica všetkých elementárnych odstredivých síl
a aj výsledná dvojica odstredivých síl sú nulové, tieto tlaky nevzniknú. Príkladom rotácie
hranola, kedy tlaky nevzniknú, je rotácia hranola okolo osi, ktorá sa nazýva voľná os,
obr. 3.37b. Voľná os je teda os otáčania, ktorá prechádza hmotným stredom telesa
a nepodlieha vplyvu odstredivých síl. Voľnými osami v telese sú hlavné osi zotrvačnosti.
Deviačný moment. Keď sa teleso otáča okolo osi idúcej jeho hmotným stredom, celkový
moment odstredivých síl je vzhľadom na všetky body osi rovnaký a možno ho vyjadriť
jediným momentom dvojice síl
UM2
od (3.36)
Obr. 3.38. Pri rotácii telesa na
každý jeho hmotnostný element
pôsobí odstredivá sila.
Obr. 3.37. a) Odstredivé sily tvoria dvojicu,
ktorá sa snaží vychýliť rotačnú os z jej polo-
hy – vznikajú tlaky v ložiskách. b) Keď vý-
slednica všetkých elementárnych odstredi-
vých síl a aj výsledná dvojica odstredivých síl
sú nulové, tieto tlaky nevzniknú.
r
r.rv
0
. dm
m
dFod
a) b)
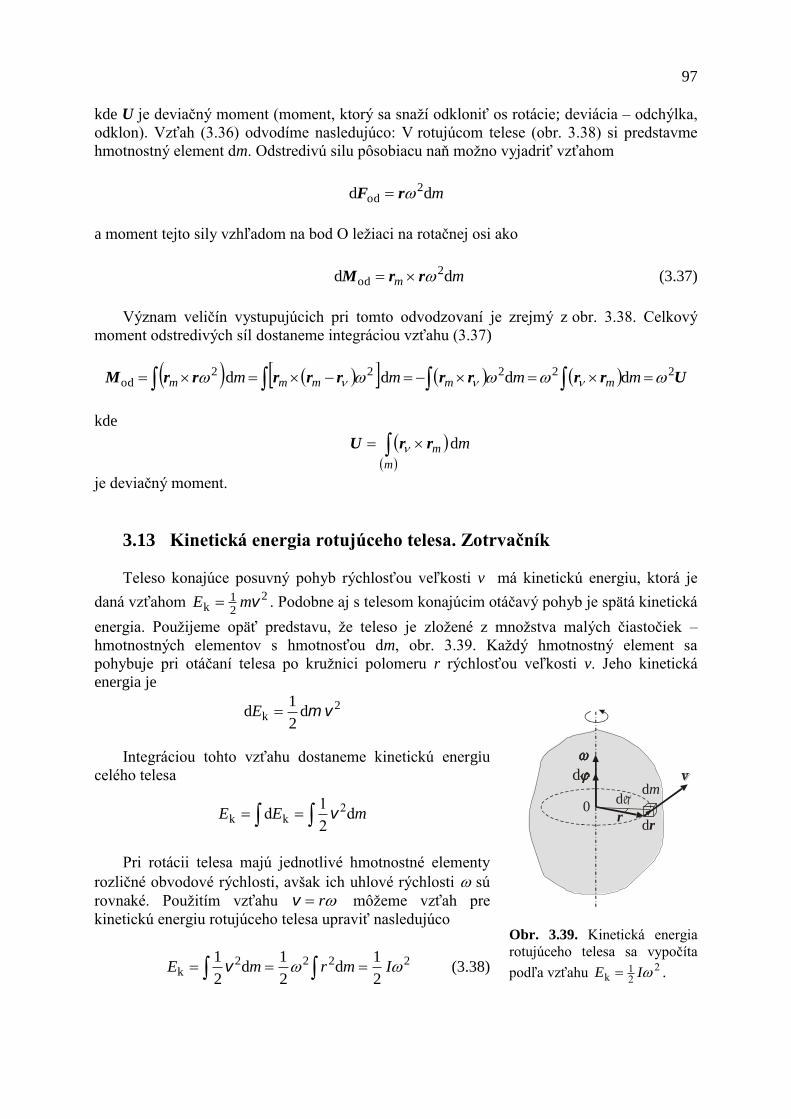
97
kde U je deviačný moment (moment, ktorý sa snaží odkloniť os rotácie; deviácia – odchýlka,
odklon). Vzťah (3.36) odvodíme nasledujúco: V rotujúcom telese (obr. 3.38) si predstavme
hmotnostný element dm. Odstredivú silu pôsobiacu naň možno vyjadriť vzťahom
mdd 2od rF
a moment tejto sily vzhľadom na bod O ležiaci na rotačnej osi ako
mm dd 2od rrM (3.37)
Význam veličín vystupujúcich pri tomto odvodzovaní je zrejmý z obr. 3.38. Celkový
moment odstredivých síl dostaneme integráciou vzťahu (3.37)
UrrrrrrrrrM22222
od ddd d mmmm mmmmm
kde
m
m
m d rrU
je deviačný moment.
3.13 Kinetická energia rotujúceho telesa. Zotrvačník
Teleso konajúce posuvný pohyb rýchlosťou veľkosti v má kinetickú energiu, ktorá je
daná vzťahom 2
21
k vmE . Podobne aj s telesom konajúcim otáčavý pohyb je spätá kinetická
energia. Použijeme opäť predstavu, že teleso je zložené z množstva malých čiastočiek –
hmotnostných elementov s hmotnosťou dm, obr. 3.39. Každý hmotnostný element sa
pohybuje pri otáčaní telesa po kružnici polomeru r rýchlosťou veľkosti v. Jeho kinetická
energia je
2k d
2
1d vmE
Integráciou tohto vzťahu dostaneme kinetickú energiu
celého telesa
mEE d 2
1d 2
kk v
Pri rotácii telesa majú jednotlivé hmotnostné elementy
rozličné obvodové rýchlosti, avšak ich uhlové rýchlosti sú
rovnaké. Použitím vzťahu rv môžeme vzťah pre
kinetickú energiu rotujúceho telesa upraviť nasledujúco
2222k
2
1d
2
1d
2
1 ImrmE v (3.38)
Obr. 3.39. Kinetická energia
rotujúceho telesa sa vypočíta
podľa vzťahu 2
21
k IE .
rdr
dmd
d0

98
kde, ako už vieme, Imr d2 je moment zotrvačnosti telesa vzhľadom na os okolo ktorej
rotuje.
Ďalej odvodíme vzťah pre prácu W sily, ktorá mení pohybový stav rotujúceho telesa
000 0
dddd MFrrFrF
r
r
W (3.39)
Teda, napríklad prácu konštantnej sily, ktorej moment M má smer vektora uhla
pootočenia môžeme vypočítať ako súčin veľkosti jej momentu a zmeny uhla pootočenia
Δ MW (3.40)
Avšak, keď na teleso konajúce rotačný pohyb pôsobí sila, ktorá mení jeho pohybový stav,
musí sa meniť tiež jeho kinetická energia. Odvodíme si v ďalšom vzťah medzi prácou tejto
sily a zmenou kinetickej energie rotujúceho telesa
k202
12
21 Δd dd
d
ddd
0 000
EIIIIt
IIW
M
Pri všeobecnom pohybe tuhého telesa s hmotnosťou m je jeho celková kinetická energia
súčtom kinetickej energie posuvného a rotačného pohybu
2
T212
T21
k ImE v (3.41)
kde vT je veľkosť rýchlosti hmotného stredu telesa, IT – moment zotrvačnosti telesa vzhľadom
na rotačnú os prechádzajúcu hmotným stredom a – uhlová rýchlosť rotácie telesa.
Na objasnenie problematiky preberanej v tejto časti si rozoberieme valenie sa valca po
vodorovnej rovine. Na valenie valca budeme najprv nazerať ako na čistú rotáciu okolo
okamžitej osi rotácie o, ktorá splýva s priamkou dotyku valca s rovinou. Kinetická energia
valca je 2
21
k IE
kde I je moment zotrvačnosti valca vzhľadom na os rotácie o a je veľkosť uhlovej rýchlosti
rotácie. Podľa Steinerovej vety platí 2
T mrII (3.42)
kde IT je moment zotrvačnosti valca vzhľadom na os prechádzajúcu hmotným stredom
a rovnobežnú s osou o, m je hmotnosť valca a r jeho polomer. Dosadením vzťahu (3.42) do
vzťahu pre kinetickú energiu valca a použitím vzťahu rv dostaneme
2T2
12T2
122
212
T21
k vmIrmIE
Tento vzťah je totožný so vzťahom (3.41) a teda kinetická energia valiaceho sa valca môže
byť vyjadrená ako súčet dvoch výrazov: Jeden odpovedá kinetickej energii rotácie okolo osi

99
prechádzajúcej hmotným stredom a druhý odpovedá posuvnému pohybu hmotného stredu
(pozri obr. 3.3).
Príklad 3.13. Kotúč s polomerom m 0,08R sa môže otáčať okolo horizontálnej osi
kolmej na kotúč a prechádzajúcej bodom O. Bod O sa nachádza vo vzdialenosti 32R od
stredu S kotúča. Bod A je k nemu symetrický vzhľadom na stred S. Kotúč vychýlime o uhol
3π2 a pustíme. Treba určiť uhlovú a obvodovú rýchlosť bodu A pri prechode cez
rovnovážnu polohu.
Riešenie: Pri výpočte budeme vychádzať zo zákona zachovania mechanickej energie: Vo
vychýlenej polohe má kotúč, vzhľadom na rovnovážnu polohu, potenciálnu energiu určenú
vzťahom ,p mghE kde význam h je zrejmý z obr. 3.40. Po uvoľnení kotúča vo vychýlenej
polohe kotúč vykonáva rotačný pohyb okolo
horizontálnej osi prechádzajúcej bodom O. Jeho
potenciálna energia sa postupne transformuje na
kinetickú. V rovnovážnej polohe má kotúč už len
kinetickú energiu ,2
21
k IE kde I je moment
zotrvačnosti kotúča vzhľadom na os rotácie a je
uhlová rýchlosť rotácie. Teda zákon zachovania
mechanickej energie kotúča má tvar
2
2
1Imgh (P1)
Moment zotrvačnosti I určíme pomocou
Steinerovej vety (vzťah (3.35))
2
T maII
V našom prípade 2
21
T mRI a Ra32 , teda
22
2
18
17
3
2
2
1mRRmmRI
(P2)
Ďalej, ako vyplýva z obr. 3.40
sin13
2sin
3
2
3
2
3
2 RRRxRh (P3)
Po dosadení vzťahov (P2) a (P3) do vzťahu (P1) dostaneme rovnicu
22
18
17
2
1sin1
3
2 mR.Rmg
z ktorej
Obr. 3.40. Kotúč vychýlime z rovnováž-
nej polohy a pustíme. Koná rotačný po-
hyb okolo bodu O.
O
S
S
A
A
R
´
´
h
x
23
R

100
12
s ,11630sin 1m 0,08
s . m ,819
17
24sin1
17
24
.R
g.
Obvodová rýchlosť bodu A pri prechode rovnovážnou polohou je
11A s . m 1,72m 0,08 .
3
4. s 16,1
3
4 Rv
Príklad 3.14. Na hornom konci naklonenej roviny dĺžky 2 m a výšky 0,2 m zadržíme
vedľa seba zarážkou valec a guľu s tými istými polomermi, obr. 3.41. Valec sa dotýka roviny
v povrchovej priamke, ktorá má vodorovný smer. Keď telesá uvoľníme, konajú valivý pohyb
bez kĺzania. Ktoré teleso sa dostane prvé na spodný koniec naklonenej roviny? Akú dráhu
prejde za túto dobu druhé teleso?
Riešenie: Pri riešení úlohy budeme vychádzať zo zákona zachovania mechanickej energie.
Pri valení telies dole naklonenou rovinou vykonávajú telesá obecný pohyb – hmotný stred
telesa sa posúva smerom nadol rýchlosťou Tv a teleso rotuje okolo osi prechádzajúcej
hmotným stredom uhlovou rýchlosťou . Celková kinetická
energia telies je teda súčtom kinetickej energie posuvného
pohybu 2T2
1kp vmE a rotačného pohybu 2
21
kr IE .
V hornej polohe naklonenej roviny majú telesá len
potenciálnu energiu ,pE ktorá sa počas valenia telies
smerom nadol mení postupne na kinetickú energiu.
V spodnej polohe naklonenej roviny majú telesá už len
kinetickú energiu (potenciálnu energiu telies na hornom
konci naklonenej roviny počítame vzhľadom na spodný
koniec). Budeme najprv riešiť pohyb valca a potom analogicky gule. Veličiny týkajúce sa
valca budeme označovať indexom „V“ a gule indexom „G“. Teda, zákon zachovania
mechanickej energie pre valec
2VV
2TVVV
2
1
2
1Imghm v (P1)
kde Vm je hmotnosť valca, h – výška naklonenej roviny, TVv – rýchlosť hmotného stredu
valca, VI – moment zotrvačnosti valca vzhľadom na os rotácie prechádzajúcu hmotným
stredom a V – uhlová rýchlosť rotácie valca okolo jeho geometrickej osi.
Moment zotrvačnosti valca vzhľadom na jeho geometrickú os je 2VV2
1V RmI . Po
dosadení do vzťahu (P1) dostaneme
2V
2VV
2TVVV
2
1
2
1
2
1Rm.mghm v
a ďalej, keďže TVVV vR
2TV
4
3vgh (P2)
Pohyb dole naklonenou rovinou je spôsobený konštantnou silou, preto platia tiež vzťahy
Obr. 3.41. Valenie sa valca
a gule dole naklonenou rovinou.
Príklad 3.14.
hs
T

101
VTVTV tav (P3)
2VTV
2
1tas (P4)
kde TVa je zrýchlenie valca, s – dĺžka naklonenej roviny a Vt – doba, za ktorú príde valec na
spodný okraj naklonenej roviny. Dosadením vzťahu (P3) do vzťahu (P2) dostaneme rovnicu
2V
2TV
4
3tagh
z ktorej možno získať vzťah, keď do nej dosadíme vyjadrenie 2V
TV
2
t
sa zo vzťahu (P4), pre
hľadanú dobu valenia sa valca dole naklonenou rovinou
s 2,47m 0,2 . s . m 9,81
3 . m 2
32V
ghst
Analogicky postupujeme aj pri výpočte doby valenia gule. Jediným rozdielom je, že
moment zotrvačnosti gule vzhľadom na os prechádzajúcu jej hmotným stredom, okolo ktorej
sa otáča pri valení je 2GGG
5
2RmI . Zákon zachovania mechanickej energie pre guľu je
2G
2GG
2TGGG
5
2.
2
1
2
1Rmmghm v
a ďalej, keďže TGGG vR
2TG
10
7vgh (P5)
Ďalej, keď postupujeme analogicky ako pri valci, dostaneme pre dobu valenia gule dole
naklonenou rovinou nasledujúci vzťah
s 2,39m 0,2 . s . m 9,81 . 5
14 . m 2
5
142G
ghst
Porovnaním výsledkov vidíme, že na spodný okraj naklonenej roviny príde skôr guľa.
Valec za tú dobu prejde vzdialenosť
m 1,87s 2,39 .
s 2,47
m 22s.
2
1
2
1 2
2
2G2
V
2VTV t
ttas
Zotrvačník. Zotrvačník je tuhé teleso, súmerné vzhľadom na svoju geometrickú os. Máva
najčastejšie tvar kotúča, otáčajúceho sa okolo svojej geometrickej osi. Táto os je potom voľná
os a kotúč má vzhľadom na ňu najväčší hlavný moment zotrvačnosti. Ak je zotrvačník
upevnený v hmotnom strede, nazýva sa voľným (bezsilovým). Keď roztočíme taký zotrvačník
okolo jeho osi symetrie, zachováva táto os stály smer v priestore pretože je voľnou osou

102
a teda na zotrvačník nepôsobí vonkajší moment sily. Roztočenému zotrvačníku môžeme
priradiť moment hybnosti ωL I , pričom I je moment zotrvačnosti vzhľadom na rotačnú os
a je vektor uhlovej rýchlosti majúci smer rotačnej osi. Podľa druhej pohybovej rovnice,
,dd tLM časová zmena momentu hybnosti je rovná výslednici momentov vonkajších síl.
Avšak pri voľnom zotrvačníku 0M a teda 0dd tL . Z toho vyplýva, že .konštL Pri
voľnom zotrvačníku je teda moment hybnosti konštantný vektor (zachováva teda smer
i veľkosť) a spolu s vektorom uhlovej rýchlosti má smer rotačnej osi. Obidva vektory
zachovávajú stály smer v priestore, obr. 3.42.
Keď moment vonkajších síl pôsobiaci na zotrvačník nie je rovný nule, potom, ako
vyplýva z rovnice tddLM , zmena momentu hybnosti Ld zotrvačníka má smer
pôsobiaceho momentu sily M. Vysvetlíme si to na pohybe zotrvačníka, ktorým bude
bicyklové koleso (kvôli ľahkej dostupnosti a praktickej demonštrácii). Roztočíme bicyklové
koleso tak, aby sa veľmi rýchlo otáčalo okolo svojej osi s uhlovou rýchlosťou veľkosti 0 .
Potom jeden koniec osky kolesa upevníme do voľnej slučky na konci motúza, obr. 3.43. Keby
sa koleso neotáčalo, zo slučky vypadne o čom sa možno ľahko presvedčiť. Avšak, keď sa
koleso rýchlo otáča nespadne, začne celé rotovať uhlovou rýchlosťou p okolo osi totožnej
s motúzom. Tento pohyb nazývame precesný pohyb.
V ďalšom odvodíme vzťah pre precesnú uhlovú rýchlosť. Budeme predpokladať, že os
roztočeného kolesa má vodorovný smer a má smer osi x (pozri obr. 3.43). Na sústavu koleso
plus oska (v ďalšom, kvôli jednoduchosti zahrnieme aj osku pod pojem koleso) pôsobia
vonkajšie sily, sila 0F , ktorou pôsobí motúz a tiaž kolesa gF . Potom moment vonkajších síl
pôsobiacich na sústavu je
jkiM mgDFD g
lebo moment sily 0F vzhľadom na bod 0 je rovný nule. Elementárna zmena momentu
hybnosti Ld kolesa za dobu td je
jML tmgDt ddd
Obr. 3.42. Os rotácie zotrvačníka, ak naňho
nepôsobí moment sily má stály smer
v priestore a preto vzhľadom na Zem rotuje.
Obr. 3.43. Keď na rotujúci zotrvačník pôsobí mo-
ment vonkajších síl, zotrvačník vykonáva precesný
pohyb.
Severný pól
L
L
p
p
z
x
y
F
F
g
0
0
0
0
0
0 0
0
0 M
dL
d
D
L L + d

103
Celkový moment hybnosti kolesa L vzhľadom na bod 0 je súčtom momentu hybnosti 0L
otáčajúceho sa kolesa okolo osky a momentu hybnosti pL precesného pohybu kolesa
p0 LLL
Moment hybnosti otáčajúceho sa kolesa je
iωL 00000 II
kde 0I je moment zotrvačnosti kolesa vzhľadom na jeho os rotácie. Moment hybnosti
precesného pohybu je
iωL ppppp II
kde pI je moment zotrvačnosti rotujúceho kolesa vzhľadom na os z. Potom
kiL pp00 II
Poznamenávame, že L je kolmé na Ld , takže sa nemôže meniť jeho veľkosť, ale len smer.
Predpokladajme, že p0 , potom celkový moment hybnosti je približne rovný momentu
hybnosti otáčania sa kolesa okolo svojej osi. Po tomto zjednodušení možno z trojuholníka na
obr. 3.43 napísať pre elementárnu zmenu precesného uhla Φd
00
ddd
I
tmgD
L
LΦ
a potom uhlová rýchlosť precesie je
00p
d
d
I
mgD
t
Φ
3.14 Kyvadlový pohyb
Kyvadlový pohyb je zvláštnym prípadom rotácie tuhého telesa okolo pevnej osi. Teleso
uvedieme do kyvadlového pohybu tak, že ho vychýlime z rovnovážnej polohy a pustíme.
Teleso začne vykonávať pohyb okolo svojej rovnovážnej polohy vplyvom tiažovej alebo
pružnej sily. V nasledujúcich častiach si rozoberieme najprv pohyb matematického kyvadla,
ktoré je akýmsi základným modelom kyvadla, potom kyvadlový pohyb reálneho telesa
(fyzikálneho kyvadla) a napokon pohyb torzného kyvadla, ktoré sa navracia do rovnovážnej
polohy pôsobením pružných síl na rozdiel od dvoch skôr spomínaných kyvadiel, ktoré sa
vracajú do rovnovážnej polohy pôsobením ich tiaže.
3.14.1 Matematické kyvadlo
Matematické kyvadlo je kyvadlo tvorené hmotným bodom na nehmotnom závese.
Modelom tohto kyvadla je malá guľôčka zavesená na tenkej niti, obr. 3.44. Keď guľôčku
vychýlime z jej rovnovážnej polohy a pustíme, začne konať kyvadlový pohyb. Ako sme už
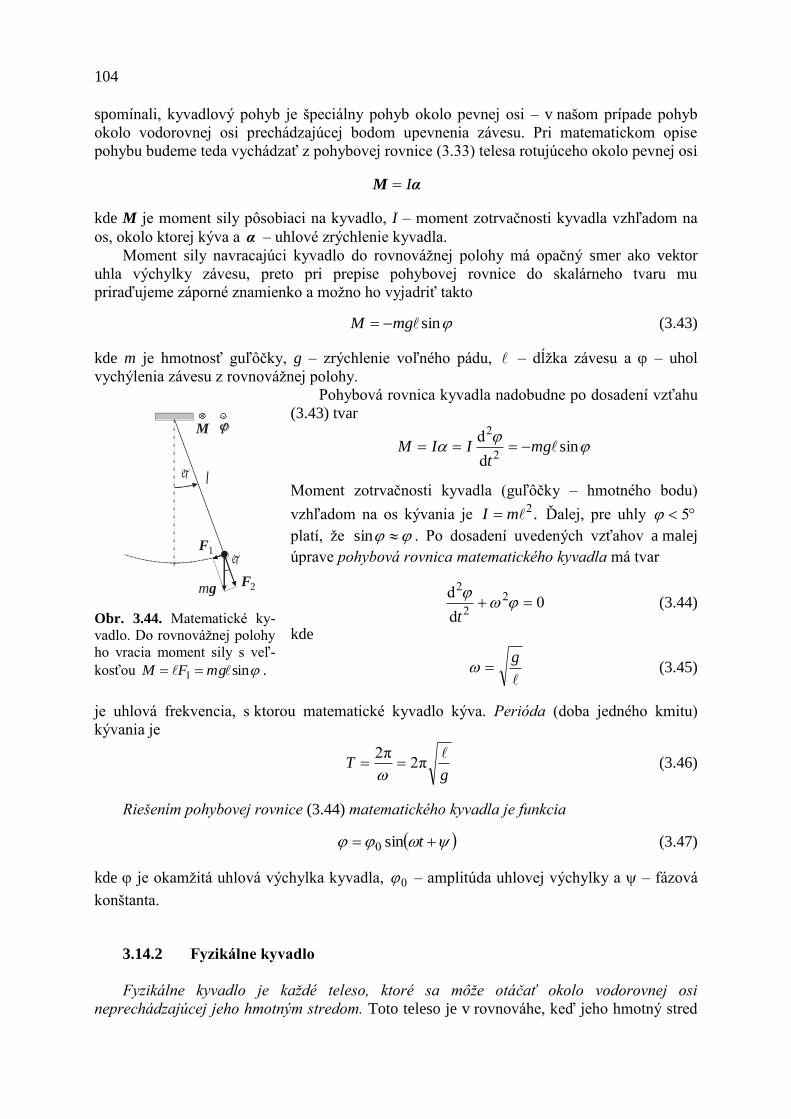
104
spomínali, kyvadlový pohyb je špeciálny pohyb okolo pevnej osi – v našom prípade pohyb
okolo vodorovnej osi prechádzajúcej bodom upevnenia závesu. Pri matematickom opise
pohybu budeme teda vychádzať z pohybovej rovnice (3.33) telesa rotujúceho okolo pevnej osi
αM I
kde M je moment sily pôsobiaci na kyvadlo, I – moment zotrvačnosti kyvadla vzhľadom na
os, okolo ktorej kýva a α – uhlové zrýchlenie kyvadla.
Moment sily navracajúci kyvadlo do rovnovážnej polohy má opačný smer ako vektor
uhla výchylky závesu, preto pri prepise pohybovej rovnice do skalárneho tvaru mu
priraďujeme záporné znamienko a možno ho vyjadriť takto
sinmgM (3.43)
kde m je hmotnosť guľôčky, g – zrýchlenie voľného pádu, – dĺžka závesu a – uhol
vychýlenia závesu z rovnovážnej polohy.
Pohybová rovnica kyvadla nadobudne po dosadení vzťahu
(3.43) tvar
sinmgt
IIM 2
2
d
d
Moment zotrvačnosti kyvadla (guľôčky – hmotného bodu)
vzhľadom na os kývania je .2mI Ďalej, pre uhly 5
platí, že sin . Po dosadení uvedených vzťahov a malej
úprave pohybová rovnica matematického kyvadla má tvar
0d
d 2
2
2
t (3.44)
kde
g (3.45)
je uhlová frekvencia, s ktorou matematické kyvadlo kýva. Perióda (doba jedného kmitu)
kývania je
gT
π2
π2
(3.46)
Riešením pohybovej rovnice (3.44) matematického kyvadla je funkcia
tsin0 (3.47)
kde je okamžitá uhlová výchylka kyvadla, 0 – amplitúda uhlovej výchylky a – fázová
konštanta.
3.14.2 Fyzikálne kyvadlo
Fyzikálne kyvadlo je každé teleso, ktoré sa môže otáčať okolo vodorovnej osi
neprechádzajúcej jeho hmotným stredom. Toto teleso je v rovnováhe, keď jeho hmotný stred
Obr. 3.44. Matematické ky-
vadlo. Do rovnovážnej polohy
ho vracia moment sily s veľ-
kosťou sin mgFM 1 .
mg
l
F
F
1
2
M
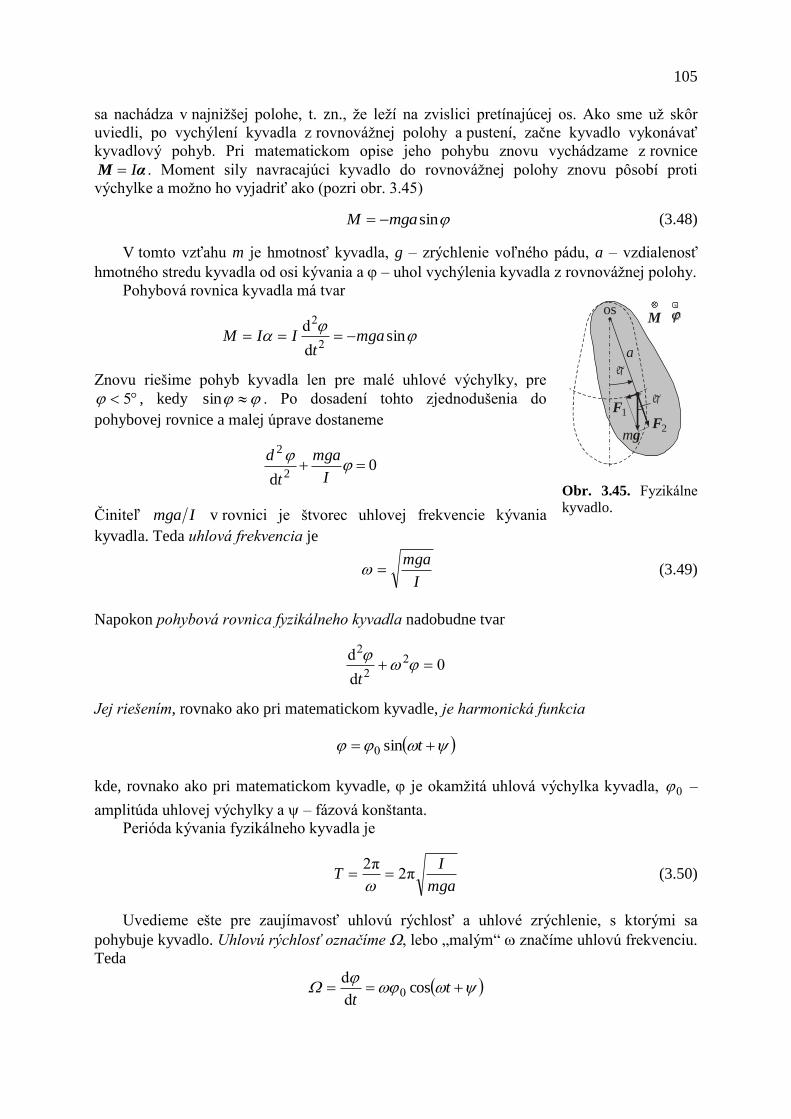
105
sa nachádza v najnižšej polohe, t. zn., že leží na zvislici pretínajúcej os. Ako sme už skôr
uviedli, po vychýlení kyvadla z rovnovážnej polohy a pustení, začne kyvadlo vykonávať
kyvadlový pohyb. Pri matematickom opise jeho pohybu znovu vychádzame z rovnice
αM I . Moment sily navracajúci kyvadlo do rovnovážnej polohy znovu pôsobí proti
výchylke a možno ho vyjadriť ako (pozri obr. 3.45)
sinmgaM (3.48)
V tomto vzťahu m je hmotnosť kyvadla, g – zrýchlenie voľného pádu, a – vzdialenosť
hmotného stredu kyvadla od osi kývania a – uhol vychýlenia kyvadla z rovnovážnej polohy.
Pohybová rovnica kyvadla má tvar
sinmgat
IIM 2
2
d
d
Znovu riešime pohyb kyvadla len pre malé uhlové výchylky, pre
5 , kedy sin . Po dosadení tohto zjednodušenia do
pohybovej rovnice a malej úprave dostaneme
0d 2
2
I
mga
t
d
Činiteľ Imga v rovnici je štvorec uhlovej frekvencie kývania
kyvadla. Teda uhlová frekvencia je
I
mga (3.49)
Napokon pohybová rovnica fyzikálneho kyvadla nadobudne tvar
0d
d 2
2
2
t
Jej riešením, rovnako ako pri matematickom kyvadle, je harmonická funkcia
tsin0
kde, rovnako ako pri matematickom kyvadle, je okamžitá uhlová výchylka kyvadla, 0 –
amplitúda uhlovej výchylky a – fázová konštanta.
Perióda kývania fyzikálneho kyvadla je
mga
IT π2
π2
(3.50)
Uvedieme ešte pre zaujímavosť uhlovú rýchlosť a uhlové zrýchlenie, s ktorými sa
pohybuje kyvadlo. Uhlovú rýchlosť označíme , lebo „malým“ značíme uhlovú frekvenciu.
Teda
tt
cos0d
d
Obr. 3.45. Fyzikálne
kyvadlo.
mg
FF
1
2
Mos
a

106
a uhlové zrýchlenie
tsint
02
d
d
Redukovanou dĺžkou r fyzikálneho kyvadla nazývame dĺžku matematického kyvadla,
ktoré kýva s rovnakou periódou ako dané fyzikálne kyvadlo. Teda musí platiť
fm TT
kde fm a TT sú perióda matematického a fyzikálneho kyvadla. Po dosadení za fm a TT
dostaneme rovnicu
mga
I
gπ2π2 r
z ktorej redukovaná dĺžka r fyzikálneho kyvadla je
ma
Ir (3.51)
Príklad 3.15. Kyvadlo pozostáva z tyče a gule privarenej na jeden koniec tyče. Tyč má
hmotnosť 1 kg a dĺžku 0,8 m; guľa má hmotnosť 2 kg a priemer 0,1 m. Os, okolo ktorej
kyvadlo kýva, prechádza druhým (voľným) koncom tyče, obr. 3.46. Aká je perióda
a frekvencia, s ktorou kyvadlo kýva? Aká je jeho redukovaná dĺžka?
Riešenie: Periódu kývania kyvadla určíme podľa vzťahu
mga
IT π2
Vzdialenosť a hmotného stredu kyvadla od osi, okolo ktorej
kyvadlo kýva určíme podľa vzťahu
m 7,0kg 2kg 1
m 0,85 . kg 2m 0,4 . kg 1
gt
TggTtt
mm
mma
V tomto vzťahu m 0,42m 8,02Tt je vzdialenosť
ťažiska tyče od osi kývania a m 0,85m 0,05 m 8,0Tg R je vzdialenosť ťažiska
gule od osi kývania.
Moment zotrvačnosti I kyvadla vzhľadom na os, okolo ktorej kýva je
5
2
3
1 2 g
2g
2tgt
RmRmmIII
22 2 2 m . kg 671m 0,05m 0,8 . kg 2m 0,1 . kg 2
5
2m 0,8 . kg 1
3
1,..
Obr. 3.46. Fyzikálne kyvadlo
pozostávajúce z tyče a gule.
a
T
R
os
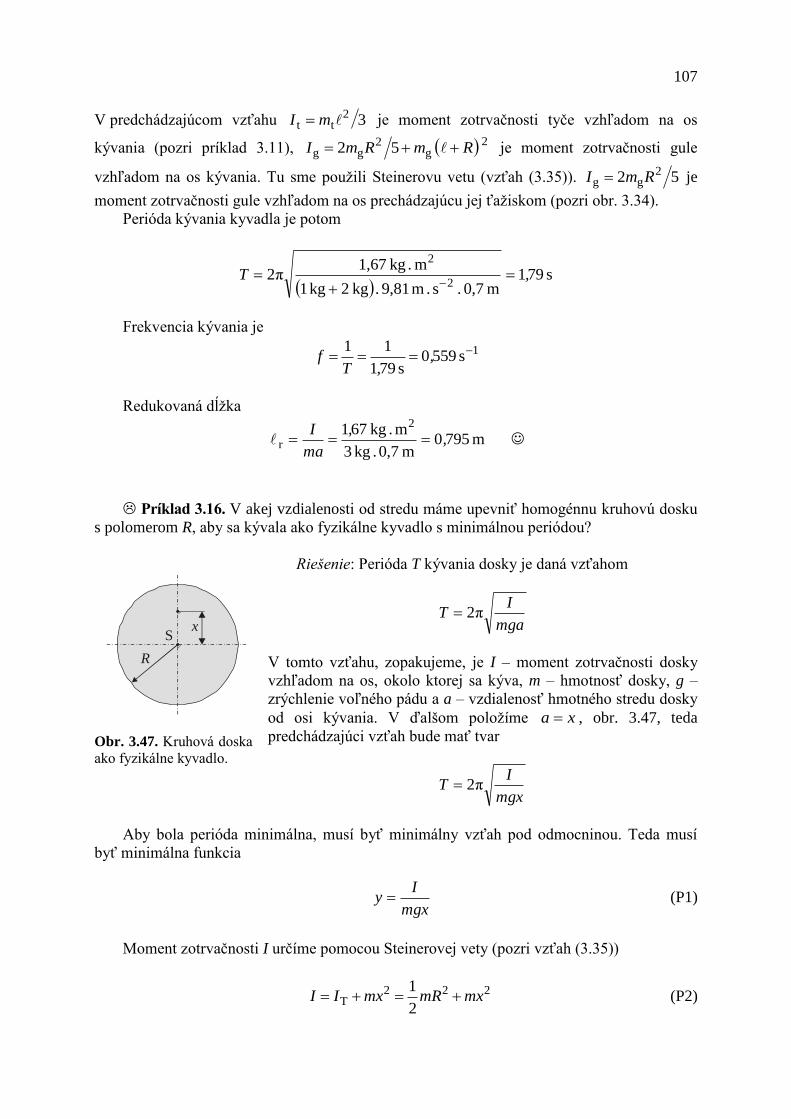
107
V predchádzajúcom vzťahu 32tt mI je moment zotrvačnosti tyče vzhľadom na os
kývania (pozri príklad 3.11), 2 g
2gg 52 RmRmI je moment zotrvačnosti gule
vzhľadom na os kývania. Tu sme použili Steinerovu vetu (vzťah (3.35)). 52 2gg RmI je
moment zotrvačnosti gule vzhľadom na os prechádzajúcu jej ťažiskom (pozri obr. 3.34).
Perióda kývania kyvadla je potom
s 791
m 0,7 . s . m 9,81 . kg 2kg 1
m . kg 1,67π2
2
2
,T
Frekvencia kývania je
1s 5590s 791
11 ,,T
f
Redukovaná dĺžka
m 7950m 0,7 . kg 3
m . kg 671 2
r ,,
ma
I
Príklad 3.16. V akej vzdialenosti od stredu máme upevniť homogénnu kruhovú dosku
s polomerom R, aby sa kývala ako fyzikálne kyvadlo s minimálnou periódou?
Riešenie: Perióda T kývania dosky je daná vzťahom
mga
IT π2
V tomto vzťahu, zopakujeme, je I – moment zotrvačnosti dosky
vzhľadom na os, okolo ktorej sa kýva, m – hmotnosť dosky, g –
zrýchlenie voľného pádu a a – vzdialenosť hmotného stredu dosky
od osi kývania. V ďalšom položíme xa , obr. 3.47, teda
predchádzajúci vzťah bude mať tvar
mgx
IT π2
Aby bola perióda minimálna, musí byť minimálny vzťah pod odmocninou. Teda musí
byť minimálna funkcia
mgx
Iy (P1)
Moment zotrvačnosti I určíme pomocou Steinerovej vety (pozri vzťah (3.35))
222T
2
1mxmRmxII (P2)
Obr. 3.47. Kruhová doska
ako fyzikálne kyvadlo.
R
xS
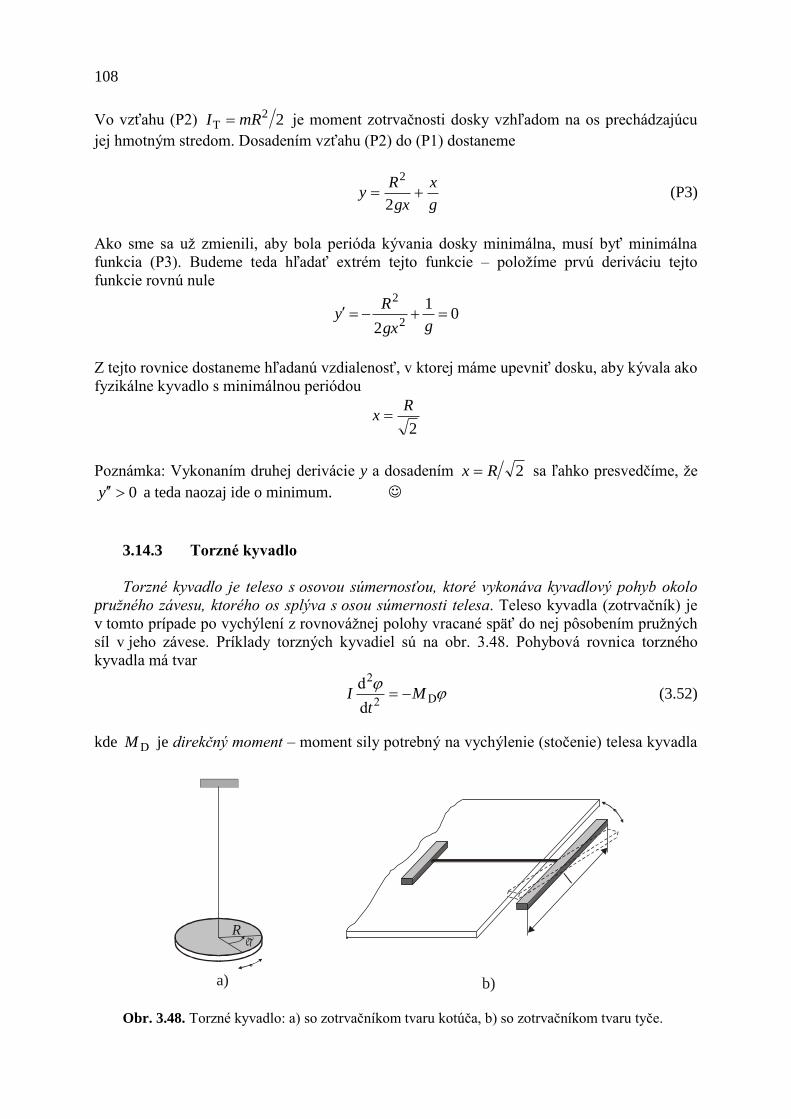
108
Vo vzťahu (P2) 22T mRI je moment zotrvačnosti dosky vzhľadom na os prechádzajúcu
jej hmotným stredom. Dosadením vzťahu (P2) do (P1) dostaneme
g
x
gx
Ry
2
2
(P3)
Ako sme sa už zmienili, aby bola perióda kývania dosky minimálna, musí byť minimálna
funkcia (P3). Budeme teda hľadať extrém tejto funkcie – položíme prvú deriváciu tejto
funkcie rovnú nule
01
2 2
2
ggx
Ry
Z tejto rovnice dostaneme hľadanú vzdialenosť, v ktorej máme upevniť dosku, aby kývala ako
fyzikálne kyvadlo s minimálnou periódou
2
Rx
Poznámka: Vykonaním druhej derivácie y a dosadením 2Rx sa ľahko presvedčíme, že
0y a teda naozaj ide o minimum.
3.14.3 Torzné kyvadlo
Torzné kyvadlo je teleso s osovou súmernosťou, ktoré vykonáva kyvadlový pohyb okolo
pružného závesu, ktorého os splýva s osou súmernosti telesa. Teleso kyvadla (zotrvačník) je
v tomto prípade po vychýlení z rovnovážnej polohy vracané späť do nej pôsobením pružných
síl v jeho závese. Príklady torzných kyvadiel sú na obr. 3.48. Pohybová rovnica torzného
kyvadla má tvar
D2
2
d
dM
tI (3.52)
kde DM je direkčný moment – moment sily potrebný na vychýlenie (stočenie) telesa kyvadla
Obr. 3.48. Torzné kyvadlo: a) so zotrvačníkom tvaru kotúča, b) so zotrvačníkom tvaru tyče.
R
l
a) b)

109
o jednotkový uhol (1 rad); platí totiž DMM a I je moment zotrvačnosti telesa
vzhľadom na os, okolo ktorej kýva. Po malej úprave rovnice (3.52) dostaneme nám už
dôverne známu rovnicu
0d
d 2
2
2
t
kde
I
M D
je uhlová frekvencia, s ktorou kyvadlo kýva. Perióda kývania torzného kyvadla je daná
vzťahom
D
π2M
IT (3.53)
Ako sme videli už pri predchádzajúcich kyvadlách, riešením pohybovej rovnice je znova
harmonická funkcia
tsin0
kde je okamžitá uhlová výchylka (stočenia) kyvadla, 0 – amplitúda uhlovej výchylky
a – fázová konštanta.
Súhrn
3.1 Úvod
Ako prvý krok k opisu pohybu telesa si vytvoríme model reálneho telesa, ktorý pozostáva
z veľkého počtu hmotných bodov – sústavu hmotných bodov (SHB). Na SHB budeme
aplikovať Newtonove dynamické zákony a neskôr, ak si predstavíme, že reálne teleso je
zložené z takého ohromného počtu hmotných bodov, že môžeme pokladať hmotnosť v telese
za spojito rozloženú, uvedieme aj základné poznatky o pohybe tuhého telesa. V našich
nasledujúcich úvahách budeme predpokladať, že vzájomná vzdialenosť hmotných bodov
v sústave sa nemení a že teleso je nedeformovateľné – je to dokonale tuhé teleso.
3.2 Kinematika sústavy hmotných bodov a telesa
Poloha SHB (tuhého telesa) vzhľadom na zvolenú súradnicovú sústavu je úplne určená
polohami troch jej (jeho) bodov, ktoré neležia na jednej priamke.
Z uvedeného sa zdá, že na určenie polohy SHB (telesa) je potrebných deväť súradníc:
) , ,( , , CBAizyx iii . Nie je tomu však tak, lebo, ako sme už spomenuli, vzdialenosti bodov
v SHB (telese) sú v dôsledku definície SHB, resp. dôsledku tuhosti telesa nemenné a preto na
určenie polohy úplne voľnej SHB (telesa) postačuje šesť vhodne vybraných súradníc troch
bodov, ktoré neležia na jednej priamke. Hovoríme, že úplne voľná SHB (teleso) má šesť
stupňov voľnosti pohybu. Teda počet stupňov voľnosti je počet údajov potrebných na určenie
polohy objektu pri danom pohybe.
Nech 0r je polohový vektor vhodne zvoleného bodu 0 tuhého telesa úplne voľného
vzhľadom na začiatok 0 inerciálnej súradnicovej sústavy S (obr. 3.2). Polohový vektor iného
bodu A telesa vzhľadom na bod 0 nech je r a vzhľadom na bod 0 nech je r . Potom platí

110
rrr 0
Derivovaním tejto rovnice podľa času dostaneme vzťah pre rýchlosť v bodu A vzhľadom na
súradnicovú sústavu S
rωrrr
00
d
d
d
d
d
dvv
ttt (3.1)
kde je vektor uhlovej rýchlosti, s ktorou teleso rotuje.
3.3 Hmotný stred sústavy hmotných bodov (ťažisko)
Polohový vektor hmotného stredu sústavy hmotných bodov možno vyjadriť vzťahom
kjir
r TTTT zyxm
m ii
(3.3)
kde im je hmotnosť i-teho hmotného bodu, ir – polohový vektor i-teho bodu a imm –
hmotnosť celej sústavy hmotných bodov.
3.4 I. pohybová rovnica sústavy hmotných bodov. Veta o pohybe hmotného stredu
Rovnica
i
i
i
i
i
ii
i
iitttt
mmd
d
d
d
d
d
d
d pp
paF
v (3.6)
sa nazýva I. pohybová rovnica SHB a opisuje translačný pohyb sústavy. V tejto rovnici F je
výslednica vonkajších síl pôsobiacich na SHB, im – hmotnosť i-teho bodu, ip – hybnosť i-
teho bodu a i
pp i – celková hybnosť SHB. Slovne možno rovnicu formulovať takto:
Súčet všetkých vonkajších síl pôsobiacich na SHB sa rovná časovej derivácii celkovej
hybnosti sústavy.
Rovnica (3.6) napísaná v tvare
pF 2
1
Δd
t
t
t (3.7)
sa nazýva I. impulzová veta a slovne znie: Impulz výslednice vonkajších síl pôsobiacich na
SHB sa rovná zmene celkovej hybnosti sústavy.
Rovnicu (3.6) možno upraviť, ak použijeme vzťah 2
2
d
d
t
ii
ra , aj takto
T T 2
2
2
2
2
2
d
d
d
d
d
darr
rF mm
tm
ttm i
i
i
i
ii (3.8)
lebo ako vyplýva zo vzťahu pre polohový vektor hmotného stredu SHB T rr mmi
ii .
Vzťah (3.8) sa nazýva veta o pohybe hmotného stredu (ťažiska). Slovne znie: Hmotný stred
SHB sa pohybuje tak, ako keby naň pôsobili všetky vonkajšie sily pôsobiace na sústavu a celá
hmotnosť sústavy bola sústredená v ňom.

111
3.5 Moment sily. Moment hybnosti
Moment sily M je vektorová veličina. Moment sily vzhľadom na bod 0 definujeme vzťahom
FrM (3.10)
kde r je polohový vektor pôsobiska sily vzhľadom na bod 0 a F pôsobiaca sila. Takáto
definícia vyjadruje aj tú skutočnosť, že vo všeobecnom prípade môže moment sily spôsobiť
nielen zmenu pohybového stavu (uhlové zrýchlenie) telesa, ale aj zmenu priestorovej
orientácie osi otáčania.
Moment sily vzhľadom na os je dôležitý z hľadiska zmeny pohybového stavu otáčajúceho sa
telesa. Je to zložka momentu sily v smere osi rotácie
0 MM
V tomto vzťahu M0 je moment sily vzhľadom na os, M – moment sily vzhľadom na bod osi a
– jednotkový vektor v smere osi. Moment sily vzhľadom na os nezávisí od voľby vzťažného
bodu na osi.
Moment hybnosti hmotného bodu vzhľadom na bod 0 definujeme vzťahom
prL (3.13)
kde r je vektor určujúci polohu hmotného bodu vzhľadom na bod 0 a p – hybnosť hmotného
bodu.
Pri otáčaní sa telesa, zavádzame podobne ako moment sily vzhľadom na os, moment hybnosti
vzhľadom na os
0 LL (3.14)
V tomto vzťahu L je moment hybnosti vzhľadom na ľubovoľný bod osi a je jednotkový
vektor v smere osi.
3.6 II. pohybová rovnica sústavy hmotných bodov
Rovnica, ktorá opisuje rotačný pohyb telesa nazýva sa II. pohybová rovnica sústavy hmotných
bodov
td
dLM (3.18)
Slovne ju možno interpretovať nasledujúco: Súčet momentov vonkajších síl pôsobiacich na
sústavu hmotných bodov sa rovná časovej derivácii celkového momentu hybnosti sústavy.
V upravenej forme ju nazývame aj II. impulzová veta
LM 2
1
Δd
t
t
t (3.19)
Impulz výslednice momentov vonkajších síl pôsobiacich na SHB sa rovná zmene celkového
momentu hybnosti sústavy.
3.7 Dokonale tuhé teleso. Skladanie síl v tuhom telese
Dokonale tuhé teleso je teleso nedeformovateľné.
Účinok sily na tuhé teleso sa nemení, ak posunieme jej pôsobisko do ľubovoľného bodu telesa
ležiaceho na vektorovej priamke sily.

112
Ak na tuhé teleso pôsobia dve rôznobežné sily F1 a F2 v bodoch A a B môžeme posunúť ich
pôsobiská do bodu C, ktorý je priesečníkom ich vektorových priamok. V tomto bode
zostrojíme rovnobežník síl 2211 a FFFF . Uhlopriečka rovnobežníka znázorňuje
výslednicu F síl 21 a FF , ktoré sú však rovnocenné silám F1 a F2. Pôsobisko výslednice F
môžeme opäť voliť ľubovoľne na jej vektorovej priamke. Pohybový účinok výslednice F na
teleso je rovnaký ako pohybový účinok síl F1 a F2.
Pôsobisko výslednice dvoch rovnobežných síl súhlasne orientovaných leží vnútri spojnice
pôsobísk pôvodných síl a delí ju v nepriamom pomere k ich veľkostiam. Veľkosť výslednice
je rovná súčtu veľkostí skladaných síl.
Výslednica dvoch rovnobežných nesúhlasne orientovaných síl je súhlasne orientovaná
s väčšou silou a jej veľkosť sa rovná rozdielu veľkostí zložiek. Jej pôsobisko leží na
predĺženej spojnici pôsobísk síl F1 a F2.
Dvojicu síl tvoria dve rovnako veľké nesúhlasne rovnobežné sily F F1 2 neležiace na tej
istej vektorovej priamke. Dvojica síl spôsobuje otáčanie tuhého telesa. Moment dvojice síl
DM je rovnaký vzhľadom na ľubovoľnú os kolmú na rovinu dvojice síl a jeho veľkosť je
daná súčinom ramena d dvojice síl a jednej sily
dFM D (3.20)
Rovnobežné sily nemožno zložiť, keď tvoria dvojicu síl. Podobne nemožno zložiť ani dve sily
mimobežné.
3.8 Hmotný stred telesa. Pohybové rovnice tuhého telesa
Polohový vektor, resp. súradnice hmotného stredu telesa počítame podľa vzťahov
V
m
mV
mm
m
d 1
d
d
T r
r
r (3.22)
resp.
d 1
; d 1
; d 1
m
T
m
T
m
T mzm
zmym
ymxm
x
kde m je hmotnosť telesa, r – polohový vektor hmotnostného elementu telesa, md – hmotnosť
elementu, – hustota látky, z ktorej je teleso zhotovené, Vd – objem elementu, x, y, z –
súradnice elementu.
Pohybové rovnice tuhého telesa majú taký istý tvar ako pohybové rovnice sústavy hmotných
bodov (pozri (3.6) a (3.18)). I. pohybová rovnica má tvar
dt
pF
d
a II. pohybová rovnica tvar
td
dLM
V týchto rovniciach F je výslednica všetkých vonkajších síl pôsobiacich na tuhé teleso,
M – výslednica momentov vonkajších síl pôsobiacich na teleso, p – celková hybnosť telesa,
L – celkový moment hybnosti telesa a pd , Ld sú zmeny hybnosti a momentu hybnosti telesa
za dobu td .

113
3.9 Zákon zachovania hybnosti a zákon zachovania momentu hybnosti telesa.
Keď na teleso (SHB) nepôsobia žiadne vonkajšie sily alebo ich výslednica je nulová, celková
hybnosť telesa (SHB) sa zachováva. Táto skutočnosť sa nazýva zákon zachovania hybnosti
konštp . (izolovaná sústava) (3.23)
Keď výslednica momentov vonkajších síl pôsobiacich na teleso (SHB) je rovná nule, celkový
moment hybnosti telesa (SHB) sa zachováva. Tento fakt sa nazýva zákon zachovania
momentu hybnosti
konštL . (izolovaná sústava) (3.24)
3.10 Podmienky rovnováhy tuhého telesa
Z I. pohybovej rovnice vyplýva, že keď výslednica vonkajších síl pôsobiacich na teleso je
rovná nule
i
i 0FF (3.25)
teleso si zachováva svoju hybnosť. Keď je teleso v pokoji, jeho hybnosť je rovná nule.
Podmienka (3.25) je podmienkou translačnej rovnováhy – aby sa teleso neposúvalo.
Prepísaná do skalárneho tvaru je
0 0 0 i
zi
i
yi
i
xi F,F,F (3.26)
Avšak teleso by mohlo ešte rotovať okolo osi prechádzajúcej hmotným stredom. Aby k tomu
neprišlo, je nutné splniť aj druhú podmienku, a to, aby výslednica momentov vonkajších síl
vzhľadom na ľubovoľný bod bola rovná nule
0i
iMM (3.27)
Ak sily pôsobia len v jednej rovine, napr. xy, podmienky rovnováhy sa zredukujú na
nasledujúce tri algebraické rovnice
0 0 0 i
zi
i
yi
i
xi M,F,F (3.28)
3.11 Pohyb tuhého telesa okolo pevnej osi
Moment hybnosti L0 telesa vzhľadom na os rotácie je
ωL I0 (3.30)
kde
m
mrI d2 (3.31)
je moment zotrvačnosti telesa vzhľadom na os. Rovnica (3.30) je platná pre ľubovoľné tuhé
teleso, ale vzťahuje sa len na zložku momentu hybnosti spadajúcu do smeru osi. Ak je však
teleso symetrické vzhľadom na os rotácie, potom celkový moment hybnosti L je rovný L0 a
možno písať
ωL I (3.32)

114
Vzťah (3.30), resp. (3.32) možno upraviť takto
αM I (3.33)
Túto rovnicu nazývame pohybovou rovnicou telesa uloženého na pevnej osi. Podotýkame, že
v tejto rovnici i
iMM je výslednica momentov vonkajších síl vzhľadom na os a moment
zotrvačnosti telesa I musí byť tiež vztiahnutý na tú istú os.
3.12 Moment zotrvačnosti. Steinerova veta
Moment zotrvačnosti je mierou zotrvačnosti telesa pri rotačnom pohybe – pri danom
momente vonkajších síl bude mať teleso s väčším momentom zotrvačnosti menšie uhlové
zrýchlenie než teleso s menším momentom zotrvačnosti. Počítame ho podľa vzťahu
m V
VrmrI d d 22 (3.34)
kde r je kolmá vzdialenosť hmotnostného elementu dm telesa od osi, vzhľadom na ktorú
moment zotrvačnosti určujeme, – hustota a dV – objem hmotnostného elementu. Jednotkou
momentu zotrvačnosti je .2m . kg 1
Keď môžeme rozmery telesa zanedbať, stretneme sa s pojmom moment zotrvačnosti
hmotného bodu. Ten vypočítame podľa vzťahu
2mrI
alebo ak ide o sústavu hmotných bodov podľa vzťahu
i
iirmI 2
V týchto vzťahoch m, resp. mi je hmotnosť hmotného bodu a r, resp ir kolmá vzdialenosť
hmotného bodu od osi.
Steinerova veta: Moment zotrvačnosti I tuhého telesa vzhľadom na os ,o ktorá neprechádza
hmotným stredom telesa sa rovná súčtu momentu zotrvačnosti IT vzhľadom na os o
prechádzajúcu hmotným stredom a rovnobežnú s osou o a súčinu hmotnosti telesa m a
štvorca vzdialenosti obidvoch osí (a2)
2T maII (3.35)
3.13 Kinetická energia rotujúceho telesa. Zotrvačník
Kinetická energia telesa rotujúceho s uhlovou rýchlosťou je určená vzťahom
2k
2
1IE (3.38)
kde I je moment zotrvačnosti telesa vzhľadom na os, okolo ktorej rotuje.
Práca W sily, ktorá mení pohybový stav rotujúceho telesa sa vypočíta podľa vzťahu
00
dd MrF
r
r
W (3.39)

115
Prácu konštantnej sily, ktorej moment M má smer vektora uhla pootočenia , môžeme
vypočítať ako súčin veľkosti jej momentu a zmeny uhla pootočenia
Δ MW (3.40)
Keď na teleso konajúce rotačný pohyb pôsobí sila, ktorá mení jeho pohybový stav, musí sa
meniť tiež jeho kinetická energia. Súvis medzi prácou tejto sily a zmenou kinetickej energie
rotujúceho telesa je nasledujúci
k202
12
21 ΔEIIW
Pri všeobecnom pohybe tuhého telesa s hmotnosťou m je jeho celková kinetická energia
súčtom kinetickej energie posuvného a rotačného pohybu
2T2
12T2
1k ImE v (3.41)
kde vT je veľkosť rýchlosti hmotného stredu telesa, IT – moment zotrvačnosti telesa vzhľadom
na rotačnú os prechádzajúcu hmotným stredom a – uhlová rýchlosť rotácie telesa.
Zotrvačník. Zotrvačník je tuhé teleso, súmerné vzhľadom na svoju geometrickú os. Máva
najčastejšie tvar kotúča, otáčajúceho sa okolo svojej geometrickej osi.
3.14 Kyvadlový pohyb
Kyvadlový pohyb je zvláštnym prípadom rotácie tuhého telesa okolo pevnej osi. Teleso
uvedieme do kyvadlového pohybu tak, že ho vychýlime z rovnovážnej polohy a pustíme.
Teleso začne vykonávať pohyb okolo svojej rovnovážnej polohy vplyvom tiažovej alebo
pružnej sily.
3.14.1 Matematické kyvadlo
Matematické kyvadlo je kyvadlo tvorené hmotným bodom na nehmotnom závese. Modelom
tohto kyvadla je malá guľôčka zavesená na tenkej niti.
Pohybová rovnica kyvadla pre uhly vychýlenia 5 má tvar
0d
d 2
2
2
t (3.44)
kde
g (3.45)
je uhlová frekvencia, s ktorou matematické kyvadlo kýva, pričom g je zrýchlenie voľného
pádu a – dĺžka závesu kyvadla. Perióda kývania je
gT
π2
π2
(3.46)
Riešením pohybovej rovnice (3.44) matematického kyvadla je funkcia
tsin0 (3.47)
kde je okamžitá uhlová výchylka kyvadla, 0 – amplitúda uhlovej výchylky a – fázová
konštanta.
116
3.14.2 Fyzikálne kyvadlo
Fyzikálne kyvadlo, je každé teleso, ktoré sa môže otáčať okolo vodorovnej osi
neprechádzajúcej jeho hmotným stredom.
Pohybová rovnica kyvadla pre uhly vychýlenia 5 má tvar
0d
d 2
2
2
t
kde
I
mga (3.49)
je uhlová frekvencia kývania kyvadla, m – hmotnosť kyvadla, a – vzdialenosť ťažiska
kyvadla od osi, okolo ktorej kýva a I – moment zotrvačnosti kyvadla vzhľadom na os
kývania.
Riešením pohybovej rovnice fyzikálneho kyvadla je harmonická funkcia
tsin0
kde je okamžitá uhlová výchylka kyvadla, 0 – amplitúda uhlovej výchylky a – fázová
konštanta.
Perióda kývania fyzikálneho kyvadla je
mga
IT π2
π2
(3.50)
Redukovanou dĺžkou r fyzikálneho kyvadla nazývame dĺžku matematického kyvadla, ktoré
kýva s rovnakou periódou ako dané fyzikálne kyvadlo. Vypočítame ju podľa vzťahu
ma
Ir (3.51)
3.14.3 Torzné kyvadlo
Torzné kyvadlo je teleso s osovou súmernosťou, ktoré vykonáva kyvadlový pohyb okolo
pružného závesu, ktorého os splýva s osou súmernosti telesa. Teleso kyvadla (zotrvačník) je
v tomto prípade po vychýlení z rovnovážnej polohy vracané späť do nej pôsobením pružných
síl v jeho závese. Pohybová rovnica torzného kyvadla je
0d
d 2
2
2
t
kde
I
M D
je uhlová frekvencia, s ktorou kyvadlo kýva, DM – direkčný moment – moment sily potrebný
na vychýlenie (stočenie) telesa kyvadla o jednotkový uhol (1 rad); platí totiž DMM a I
je moment zotrvačnosti telesa vzhľadom na os, okolo ktorej kýva. Perióda kývania torzného
kyvadla je daná vzťahom
117
D
π2M
IT (3.53)
Riešením pohybovej rovnice je znova harmonická funkcia
tsin0
kde je okamžitá uhlová výchylka (stočenia) kyvadla, 0 – amplitúda uhlovej výchylky
a – fázová konštanta.
51
4 PRUŽNOSŤ A PEVNOSŤ
4.1 Úvod
V predchádzajúcich kapitolách sme sa zaoberali správaním sa tuhých telies, ktoré sa
nedeformovali ani pôsobením najväčších síl. Také telesá sme nazvali dokonale tuhé. Skúmali
sme ich správanie sa z hľadiska zmeny ich pohybového stavu, keď na ne pôsobia vonkajšie
sily. Sem teda možno zaradiť aj problémy, ktoré rieši statika.
4.2 Charakteristika tuhých látok
4.2.1 Rozdelenie tuhých látok
4.2.2 Väzbové sily, väzbová energia
4.2.3 Hustota kryštálu a medziatómové vzdialenosti
4.2.4 Poruchy kryštálovej štruktúry
4.2.5 Fázové diagramy
4.3 Pevnosť tuhých látok
4.4 Deformácia v ťahu a tlaku. Hookov zákon pre ťah
4.5 Ohyb laty
4.6 Deformácia v šmyku. Hookov zákon pre šmyk
4.7 Krútenie a jeho súvis so šmykom
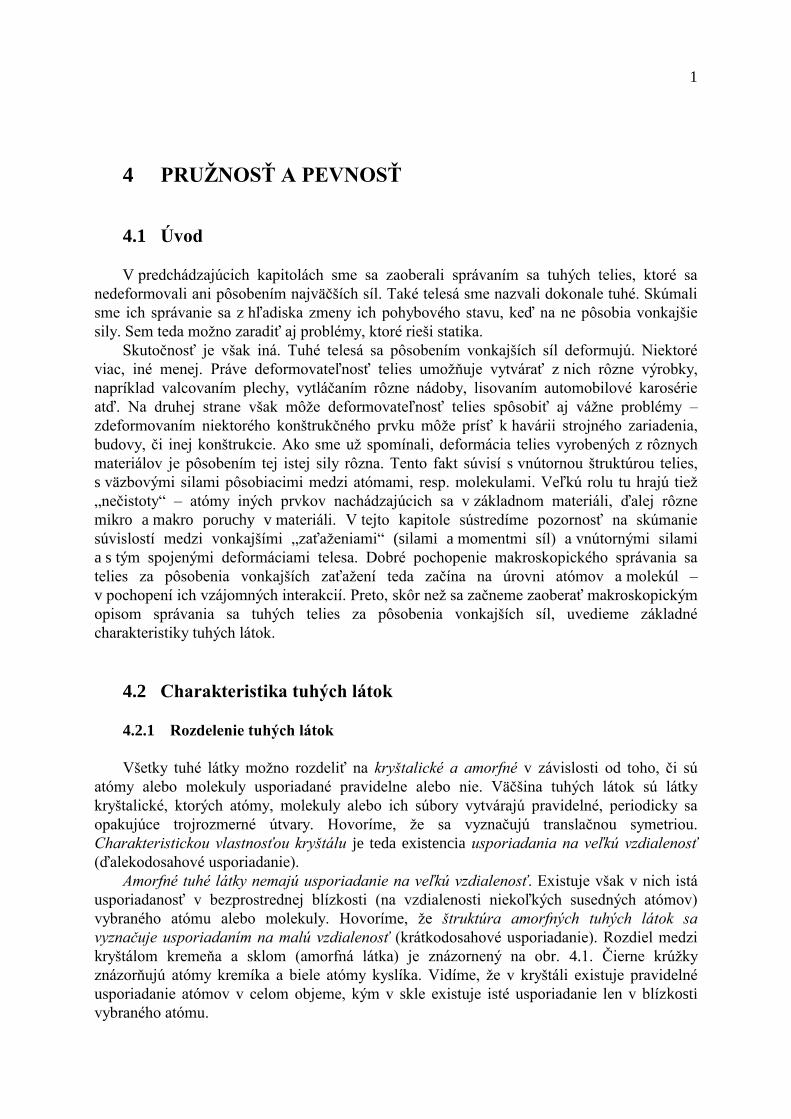
1
4 PRUŢNOSŤ A PEVNOSŤ
4.1 Úvod
V predchádzajúcich kapitolách sme sa zaoberali správaním sa tuhých telies, ktoré sa
nedeformovali ani pôsobením najväčších síl. Také telesá sme nazvali dokonale tuhé. Skúmali
sme ich správanie sa z hľadiska zmeny ich pohybového stavu, keď na ne pôsobia vonkajšie
sily. Sem teda moţno zaradiť aj problémy, ktoré rieši statika.
Skutočnosť je však iná. Tuhé telesá sa pôsobením vonkajších síl deformujú. Niektoré
viac, iné menej. Práve deformovateľnosť telies umoţňuje vytvárať z nich rôzne výrobky,
napríklad valcovaním plechy, vytláčaním rôzne nádoby, lisovaním automobilové karosérie
atď. Na druhej strane však môţe deformovateľnosť telies spôsobiť aj váţne problémy –
zdeformovaním niektorého konštrukčného prvku môţe prísť k havárii strojného zariadenia,
budovy, či inej konštrukcie. Ako sme uţ spomínali, deformácia telies vyrobených z rôznych
materiálov je pôsobením tej istej sily rôzna. Tento fakt súvisí s vnútornou štruktúrou telies,
s väzbovými silami pôsobiacimi medzi atómami, resp. molekulami. Veľkú rolu tu hrajú tieţ
„nečistoty“ – atómy iných prvkov nachádzajúcich sa v základnom materiáli, ďalej rôzne
mikro a makro poruchy v materiáli. V tejto kapitole sústredíme pozornosť na skúmanie
súvislostí medzi vonkajšími „zaťaţeniami“ (silami a momentmi síl) a vnútornými silami
a s tým spojenými deformáciami telesa. Dobré pochopenie makroskopického správania sa
telies za pôsobenia vonkajších zaťaţení teda začína na úrovni atómov a molekúl –
v pochopení ich vzájomných interakcií. Preto, skôr neţ sa začneme zaoberať makroskopickým
opisom správania sa tuhých telies za pôsobenia vonkajších síl, uvedieme základné
charakteristiky tuhých látok.
4.2 Charakteristika tuhých látok
4.2.1 Rozdelenie tuhých látok
Všetky tuhé látky moţno rozdeliť na kryštalické a amorfné v závislosti od toho, či sú
atómy alebo molekuly usporiadané pravidelne alebo nie. Väčšina tuhých látok sú látky
kryštalické, ktorých atómy, molekuly alebo ich súbory vytvárajú pravidelné, periodicky sa
opakujúce trojrozmerné útvary. Hovoríme, ţe sa vyznačujú translačnou symetriou.
Charakteristickou vlastnosťou kryštálu je teda existencia usporiadania na veľkú vzdialenosť
(ďalekodosahové usporiadanie).
Amorfné tuhé látky nemajú usporiadanie na veľkú vzdialenosť. Existuje však v nich istá
usporiadanosť v bezprostrednej blízkosti (na vzdialenosti niekoľkých susedných atómov)
vybraného atómu alebo molekuly. Hovoríme, ţe štruktúra amorfných tuhých látok sa
vyznačuje usporiadaním na malú vzdialenosť (krátkodosahové usporiadanie). Rozdiel medzi
kryštálom kremeňa a sklom (amorfná látka) je znázornený na obr. 4.1. Čierne krúţky
znázorňujú atómy kremíka a biele atómy kyslíka. Vidíme, ţe v kryštáli existuje pravidelné
usporiadanie atómov v celom objeme, kým v skle existuje isté usporiadanie len v blízkosti
vybraného atómu.

2
Existuje istá analógia medzi amorfnými tuhými látkami a kvapalinami. Kvapaliny sa
zvyčajne povaţujú za bliţšie plynom neţ tuhým látkam. Kvapaliny a plyny sa vyznačujú
vlastnosťou, ktorú nazývame tekutosť (odtiaľ spoločný názov tekutiny) a ako uvidíme neskôr,
pri teplotách nad kritickým bodom niet medzi nimi rozdielu. Kvapaliny majú však niečo
spoločné aj s tuhými látkami. Napríklad hustota
danej kvapaliny je zvyčajne bliţšie k hustote
príslušnej tuhej látky, neţ k hustote príslušnej
plynnej látky. Z toho vyplýva, ţe usporiadanie častíc
z hľadiska tesnosti v tuhej a kvapalnej fáze je
porovnateľné, čo potvrdzuje i temer rovnaká
stlačiteľnosť týchto látok. Dokonca merania ukazujú,
ţe mnohé kvapaliny majú v kaţdom okamihu určité
usporiadanie na malú vzdialenosť, podobne ako
amorfné tuhé látky avšak s tým rozdielom, ţe zhluky
molekúl kvapaliny sa neustále posúvajú. Ak je
rýchlosť tuhnutia kvapaliny taká veľká, ţe molekuly
sa nestačia premiestňovať, usporiadať do kryštálovej
mrieţky, potom výsledkom je tuhá látka s vnútornou
konfiguráciou kvapaliny. Zachovalo sa tak jedno
z prechodných usporiadaní molekúl kvapaliny.
Amorfné tuhé látky sú nestabilné a s časom menia
svoju štruktúru tak, ţe táto sa pribliţuje kryštalickej
štruktúre. Kryštalizácia je taká pomalá, ţe k nej
prakticky neprichádza. Avšak sú známe prípady
starých vzoriek skla (niekoľko sto rokov), ktoré
skryštalizovali. Proces kryštalizácie skla sa dá
urýchliť ohriatím na teplotu jeho mäknutia.
Kryštalické látky delíme z hľadiska toho, či
pozostávajú len z jedného obrovského kryštálu alebo
zo súboru maličkých kryštálikov – zŕn na mono-
kryštalické a polykryštalické. Pritom tá istá látka sa
môţe nachádzať v jednej aj druhej modifikácii.
Obr. 4.1. Usporiadanie atómov v kryštáli kremeňa a v skle. Čierne krúţky
znázorňujú atómy kremíka a biele atómy kyslíka. V kryštáli existuje
pravidelné usporiadanie v celom objeme. V skle existuje isté usporiadanie
len v blízkosti vybraného atómu.
Obr. 4.2. Kryštálová štruktúra vznikne
umiestnením bázy do kaţdého uzlového
bodu kryštalickej (priestorovej) mrieţky.
Kryštalická mrieţka
Báza pozostávajúca z dvochrôznych atómov
Kryštálová štruktúra
uzlový bod
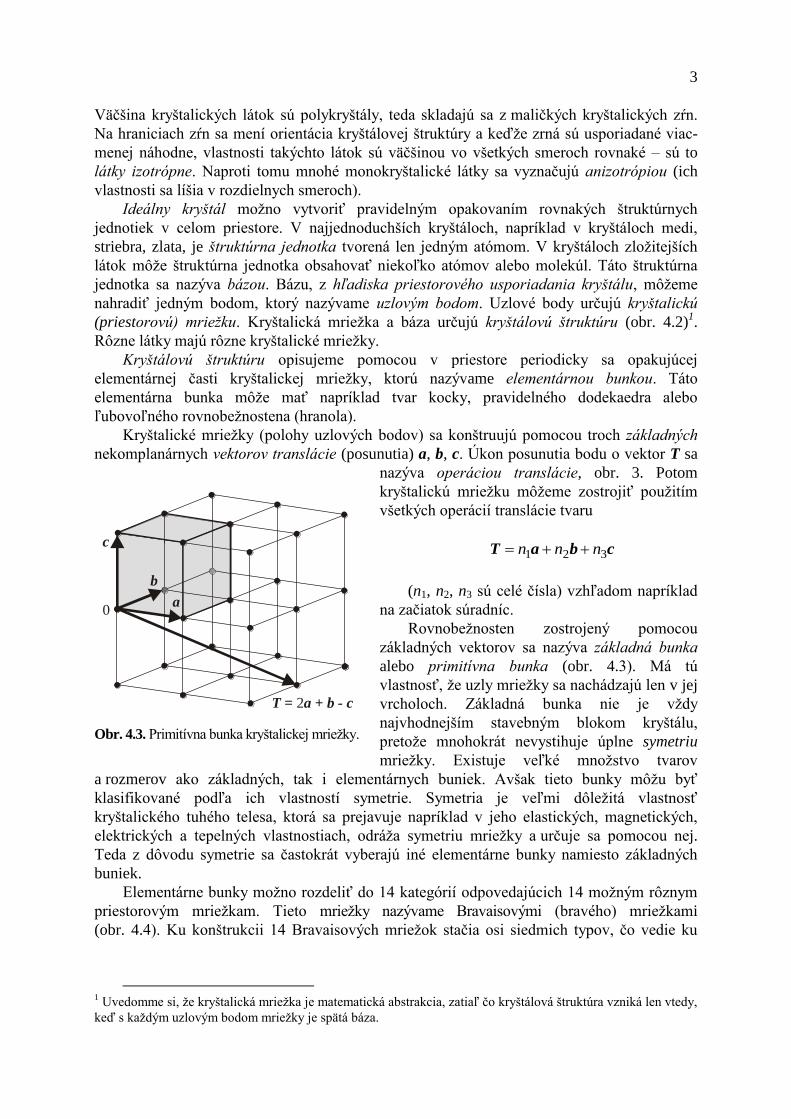
3
Väčšina kryštalických látok sú polykryštály, teda skladajú sa z maličkých kryštalických zŕn.
Na hraniciach zŕn sa mení orientácia kryštálovej štruktúry a keďţe zrná sú usporiadané viac-
menej náhodne, vlastnosti takýchto látok sú väčšinou vo všetkých smeroch rovnaké – sú to
látky izotrópne. Naproti tomu mnohé monokryštalické látky sa vyznačujú anizotrópiou (ich
vlastnosti sa líšia v rozdielnych smeroch).
Ideálny kryštál moţno vytvoriť pravidelným opakovaním rovnakých štruktúrnych
jednotiek v celom priestore. V najjednoduchších kryštáloch, napríklad v kryštáloch medi,
striebra, zlata, je štruktúrna jednotka tvorená len jedným atómom. V kryštáloch zloţitejších
látok môţe štruktúrna jednotka obsahovať niekoľko atómov alebo molekúl. Táto štruktúrna
jednotka sa nazýva bázou. Bázu, z hľadiska priestorového usporiadania kryštálu, môţeme
nahradiť jedným bodom, ktorý nazývame uzlovým bodom. Uzlové body určujú kryštalickú
(priestorovú) mriežku. Kryštalická mrieţka a báza určujú kryštálovú štruktúru (obr. 4.2)1.
Rôzne látky majú rôzne kryštalické mrieţky.
Kryštálovú štruktúru opisujeme pomocou v priestore periodicky sa opakujúcej
elementárnej časti kryštalickej mrieţky, ktorú nazývame elementárnou bunkou. Táto
elementárna bunka môţe mať napríklad tvar kocky, pravidelného dodekaedra alebo
ľubovoľného rovnobeţnostena (hranola).
Kryštalické mrieţky (polohy uzlových bodov) sa konštruujú pomocou troch základných
nekomplanárnych vektorov translácie (posunutia) a, b, c. Úkon posunutia bodu o vektor T sa
nazýva operáciou translácie, obr. 3. Potom
kryštalickú mrieţku môţeme zostrojiť pouţitím
všetkých operácií translácie tvaru
cbaT 321 nnn
(n1, n2, n3 sú celé čísla) vzhľadom napríklad
na začiatok súradníc.
Rovnobeţnosten zostrojený pomocou
základných vektorov sa nazýva základná bunka
alebo primitívna bunka (obr. 4.3). Má tú
vlastnosť, ţe uzly mrieţky sa nachádzajú len v jej
vrcholoch. Základná bunka nie je vţdy
najvhodnejším stavebným blokom kryštálu,
pretoţe mnohokrát nevystihuje úplne symetriu
mrieţky. Existuje veľké mnoţstvo tvarov
a rozmerov ako základných, tak i elementárnych buniek. Avšak tieto bunky môţu byť
klasifikované podľa ich vlastností symetrie. Symetria je veľmi dôleţitá vlastnosť
kryštalického tuhého telesa, ktorá sa prejavuje napríklad v jeho elastických, magnetických,
elektrických a tepelných vlastnostiach, odráţa symetriu mrieţky a určuje sa pomocou nej.
Teda z dôvodu symetrie sa častokrát vyberajú iné elementárne bunky namiesto základných
buniek.
Elementárne bunky moţno rozdeliť do 14 kategórií odpovedajúcich 14 moţným rôznym
priestorovým mrieţkam. Tieto mrieţky nazývame Bravaisovými (bravého) mrieţkami
(obr. 4.4). Ku konštrukcii 14 Bravaisových mrieţok stačia osi siedmich typov, čo vedie ku
1 Uvedomme si, ţe kryštalická mrieţka je matematická abstrakcia, zatiaľ čo kryštálová štruktúra vzniká len vtedy,
keď s kaţdým uzlovým bodom mrieţky je spätá báza.
Obr. 4.3. Primitívna bunka kryštalickej mrieţky.
T = a + b - c 2
a
b
c
0
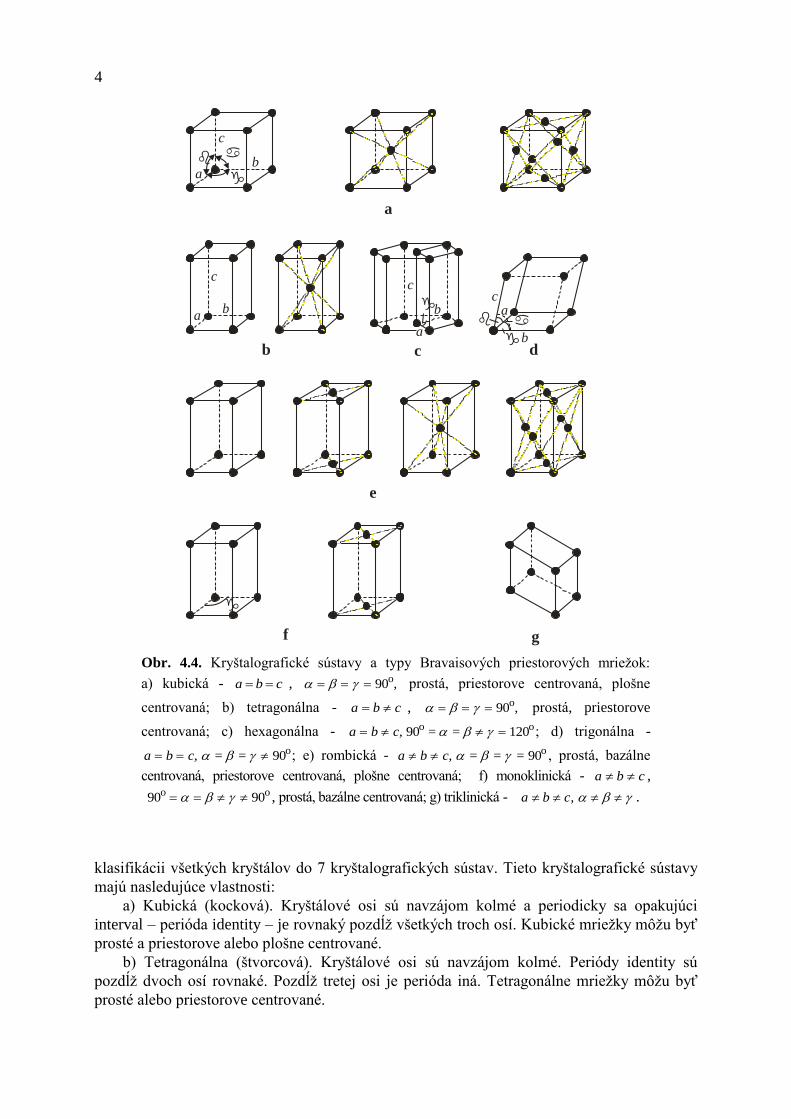
4
klasifikácii všetkých kryštálov do 7 kryštalografických sústav. Tieto kryštalografické sústavy
majú nasledujúce vlastnosti:
a) Kubická (kocková). Kryštálové osi sú navzájom kolmé a periodicky sa opakujúci
interval – perióda identity – je rovnaký pozdĺţ všetkých troch osí. Kubické mrieţky môţu byť
prosté a priestorove alebo plošne centrované.
b) Tetragonálna (štvorcová). Kryštálové osi sú navzájom kolmé. Periódy identity sú
pozdĺţ dvoch osí rovnaké. Pozdĺţ tretej osi je perióda iná. Tetragonálne mrieţky môţu byť
prosté alebo priestorove centrované.
Obr. 4.4. Kryštalografické sústavy a typy Bravaisových priestorových mrieţok:
a) kubická - a b c , 90o, prostá, priestorove centrovaná, plošne
centrovaná; b) tetragonálna - a b c , 90o, prostá, priestorove
centrovaná; c) hexagonálna - a b c , 90 = =o o 120 ; d) trigonálna -
a b c , = = 90 o; e) rombická - a b c , = = = 90 o , prostá, bazálne
centrovaná, priestorove centrovaná, plošne centrovaná; f) monoklinická - a b c ,
90o o 90 , prostá, bazálne centrovaná; g) triklinická - a b c , .
a
a
b
b
c
c
a
a
b
a
ab
b
cc
c d
e
f g
ab
b
g
g
g
g
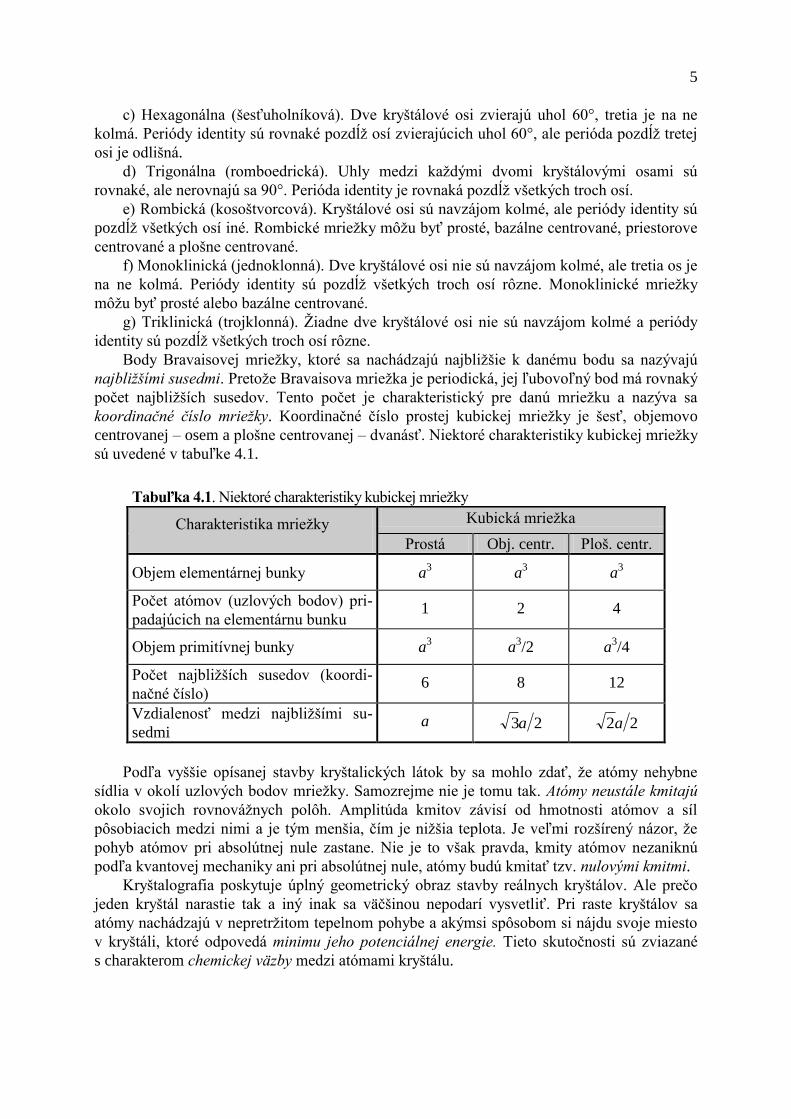
5
c) Hexagonálna (šesťuholníková). Dve kryštálové osi zvierajú uhol 60°, tretia je na ne
kolmá. Periódy identity sú rovnaké pozdĺţ osí zvierajúcich uhol 60°, ale perióda pozdĺţ tretej
osi je odlišná.
d) Trigonálna (romboedrická). Uhly medzi kaţdými dvomi kryštálovými osami sú
rovnaké, ale nerovnajú sa 90°. Perióda identity je rovnaká pozdĺţ všetkých troch osí.
e) Rombická (kosoštvorcová). Kryštálové osi sú navzájom kolmé, ale periódy identity sú
pozdĺţ všetkých osí iné. Rombické mrieţky môţu byť prosté, bazálne centrované, priestorove
centrované a plošne centrované.
f) Monoklinická (jednoklonná). Dve kryštálové osi nie sú navzájom kolmé, ale tretia os je
na ne kolmá. Periódy identity sú pozdĺţ všetkých troch osí rôzne. Monoklinické mrieţky
môţu byť prosté alebo bazálne centrované.
g) Triklinická (trojklonná). Ţiadne dve kryštálové osi nie sú navzájom kolmé a periódy
identity sú pozdĺţ všetkých troch osí rôzne.
Body Bravaisovej mrieţky, ktoré sa nachádzajú najbliţšie k danému bodu sa nazývajú
najbližšími susedmi. Pretoţe Bravaisova mrieţka je periodická, jej ľubovoľný bod má rovnaký
počet najbliţších susedov. Tento počet je charakteristický pre danú mrieţku a nazýva sa
koordinačné číslo mriežky. Koordinačné číslo prostej kubickej mrieţky je šesť, objemovo
centrovanej – osem a plošne centrovanej – dvanásť. Niektoré charakteristiky kubickej mrieţky
sú uvedené v tabuľke 4.1.
Podľa vyššie opísanej stavby kryštalických látok by sa mohlo zdať, ţe atómy nehybne
sídlia v okolí uzlových bodov mrieţky. Samozrejme nie je tomu tak. Atómy neustále kmitajú
okolo svojich rovnováţnych polôh. Amplitúda kmitov závisí od hmotnosti atómov a síl
pôsobiacich medzi nimi a je tým menšia, čím je niţšia teplota. Je veľmi rozšírený názor, ţe
pohyb atómov pri absolútnej nule zastane. Nie je to však pravda, kmity atómov nezaniknú
podľa kvantovej mechaniky ani pri absolútnej nule, atómy budú kmitať tzv. nulovými kmitmi.
Kryštalografia poskytuje úplný geometrický obraz stavby reálnych kryštálov. Ale prečo
jeden kryštál narastie tak a iný inak sa väčšinou nepodarí vysvetliť. Pri raste kryštálov sa
atómy nachádzajú v nepretrţitom tepelnom pohybe a akýmsi spôsobom si nájdu svoje miesto
v kryštáli, ktoré odpovedá minimu jeho potenciálnej energie. Tieto skutočnosti sú zviazané
s charakterom chemickej väzby medzi atómami kryštálu.
Tabuľka 4.1. Niektoré charakteristiky kubickej mrieţky
Charakteristika mrieţky
Kubická mrieţka
Prostá Obj. centr. Ploš. centr.
Objem elementárnej bunky a3 a
3 a
3
Počet atómov (uzlových bodov) pri-
padajúcich na elementárnu bunku 1 2 4
Objem primitívnej bunky a3 a
3/2 a
3/4
Počet najbliţších susedov (koordi-
načné číslo) 6 8 12
Vzdialenosť medzi najbliţšími su-
sedmi a
3 2a
2 2a
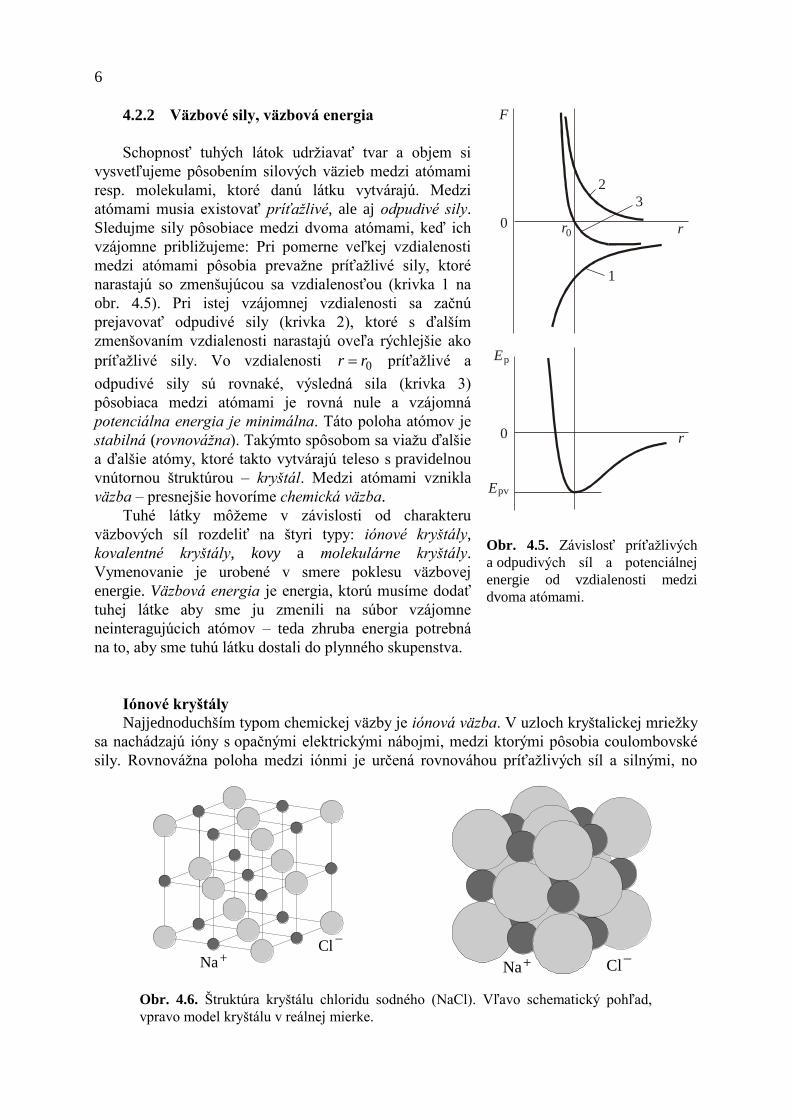
6
4.2.2 Väzbové sily, väzbová energia
Schopnosť tuhých látok udrţiavať tvar a objem si
vysvetľujeme pôsobením silových väzieb medzi atómami
resp. molekulami, ktoré danú látku vytvárajú. Medzi
atómami musia existovať príťažlivé, ale aj odpudivé sily.
Sledujme sily pôsobiace medzi dvoma atómami, keď ich
vzájomne pribliţujeme: Pri pomerne veľkej vzdialenosti
medzi atómami pôsobia prevaţne príťaţlivé sily, ktoré
narastajú so zmenšujúcou sa vzdialenosťou (krivka 1 na
obr. 4.5). Pri istej vzájomnej vzdialenosti sa začnú
prejavovať odpudivé sily (krivka 2), ktoré s ďalším
zmenšovaním vzdialenosti narastajú oveľa rýchlejšie ako
príťaţlivé sily. Vo vzdialenosti 0rr príťaţlivé a
odpudivé sily sú rovnaké, výsledná sila (krivka 3)
pôsobiaca medzi atómami je rovná nule a vzájomná
potenciálna energia je minimálna. Táto poloha atómov je
stabilná (rovnovážna). Takýmto spôsobom sa viaţu ďalšie
a ďalšie atómy, ktoré takto vytvárajú teleso s pravidelnou
vnútornou štruktúrou – kryštál. Medzi atómami vznikla
väzba – presnejšie hovoríme chemická väzba.
Tuhé látky môţeme v závislosti od charakteru
väzbových síl rozdeliť na štyri typy: iónové kryštály,
kovalentné kryštály, kovy a molekulárne kryštály.
Vymenovanie je urobené v smere poklesu väzbovej
energie. Väzbová energia je energia, ktorú musíme dodať
tuhej látke aby sme ju zmenili na súbor vzájomne
neinteragujúcich atómov – teda zhruba energia potrebná
na to, aby sme tuhú látku dostali do plynného skupenstva.
Iónové kryštály
Najjednoduchším typom chemickej väzby je iónová väzba. V uzloch kryštalickej mrieţky
sa nachádzajú ióny s opačnými elektrickými nábojmi, medzi ktorými pôsobia coulombovské
sily. Rovnováţna poloha medzi iónmi je určená rovnováhou príťaţlivých síl a silnými, no
Obr. 4.5. Závislosť príťaţlivých
a odpudivých síl a potenciálnej
energie od vzdialenosti medzi
dvoma atómami.
Obr. 4.6. Štruktúra kryštálu chloridu sodného (NaCl). Vľavo schematický pohľad,
vpravo model kryštálu v reálnej mierke.
r
r
2
1
3
0
0
F
r0
E
Ep
pv
+Cl
_
Na Na Cl+_
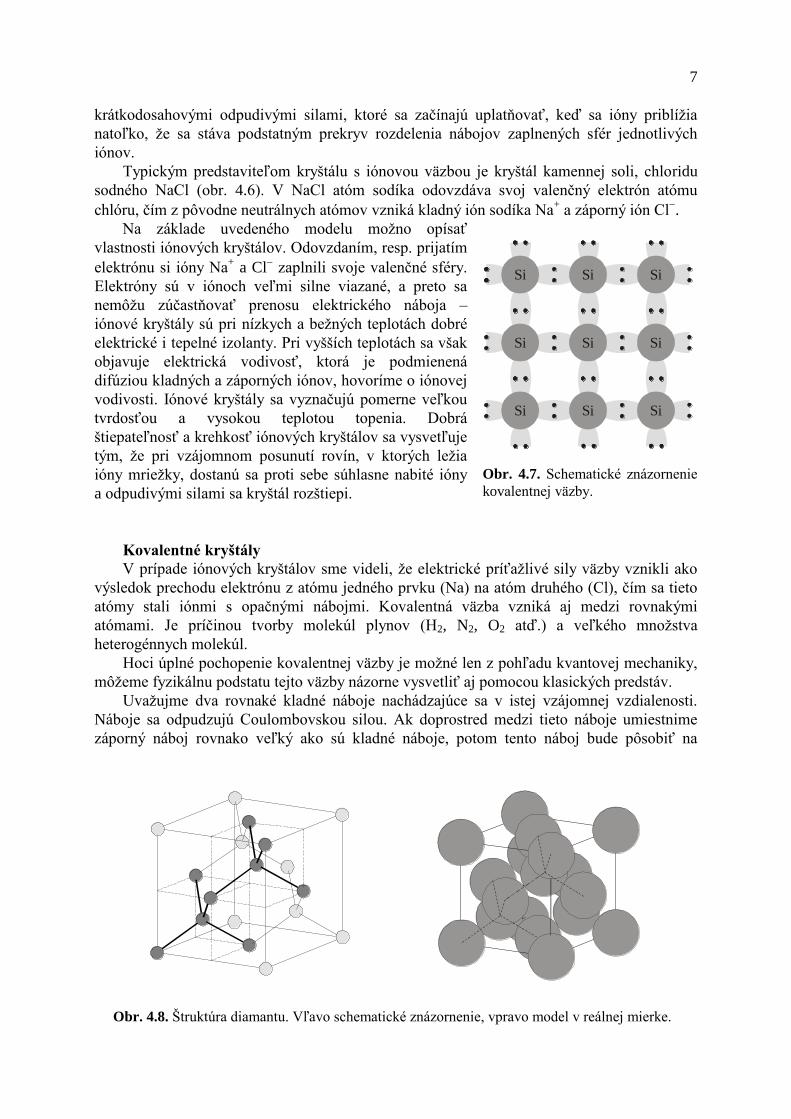
7
krátkodosahovými odpudivými silami, ktoré sa začínajú uplatňovať, keď sa ióny priblíţia
natoľko, ţe sa stáva podstatným prekryv rozdelenia nábojov zaplnených sfér jednotlivých
iónov.
Typickým predstaviteľom kryštálu s iónovou väzbou je kryštál kamennej soli, chloridu
sodného NaCl (obr. 4.6). V NaCl atóm sodíka odovzdáva svoj valenčný elektrón atómu
chlóru, čím z pôvodne neutrálnych atómov vzniká kladný ión sodíka Na+ a záporný ión Cl
.
Na základe uvedeného modelu moţno opísať
vlastnosti iónových kryštálov. Odovzdaním, resp. prijatím
elektrónu si ióny Na+ a Cl
zaplnili svoje valenčné sféry.
Elektróny sú v iónoch veľmi silne viazané, a preto sa
nemôţu zúčastňovať prenosu elektrického náboja –
iónové kryštály sú pri nízkych a beţných teplotách dobré
elektrické i tepelné izolanty. Pri vyšších teplotách sa však
objavuje elektrická vodivosť, ktorá je podmienená
difúziou kladných a záporných iónov, hovoríme o iónovej
vodivosti. Iónové kryštály sa vyznačujú pomerne veľkou
tvrdosťou a vysokou teplotou topenia. Dobrá
štiepateľnosť a krehkosť iónových kryštálov sa vysvetľuje
tým, ţe pri vzájomnom posunutí rovín, v ktorých leţia
ióny mrieţky, dostanú sa proti sebe súhlasne nabité ióny
a odpudivými silami sa kryštál rozštiepi.
Kovalentné kryštály
V prípade iónových kryštálov sme videli, ţe elektrické príťaţlivé sily väzby vznikli ako
výsledok prechodu elektrónu z atómu jedného prvku (Na) na atóm druhého (Cl), čím sa tieto
atómy stali iónmi s opačnými nábojmi. Kovalentná väzba vzniká aj medzi rovnakými
atómami. Je príčinou tvorby molekúl plynov (H2, N2, O2 atď.) a veľkého mnoţstva
heterogénnych molekúl.
Hoci úplné pochopenie kovalentnej väzby je moţné len z pohľadu kvantovej mechaniky,
môţeme fyzikálnu podstatu tejto väzby názorne vysvetliť aj pomocou klasických predstáv.
Uvaţujme dva rovnaké kladné náboje nachádzajúce sa v istej vzájomnej vzdialenosti.
Náboje sa odpudzujú Coulombovskou silou. Ak doprostred medzi tieto náboje umiestnime
záporný náboj rovnako veľký ako sú kladné náboje, potom tento náboj bude pôsobiť na
Obr. 4.7. Schematické znázornenie
kovalentnej väzby.
Obr. 4.8. Štruktúra diamantu. Vľavo schematické znázornenie, vpravo model v reálnej mierke.
Si
Si
Si Si Si
Si
Si
Si
Si
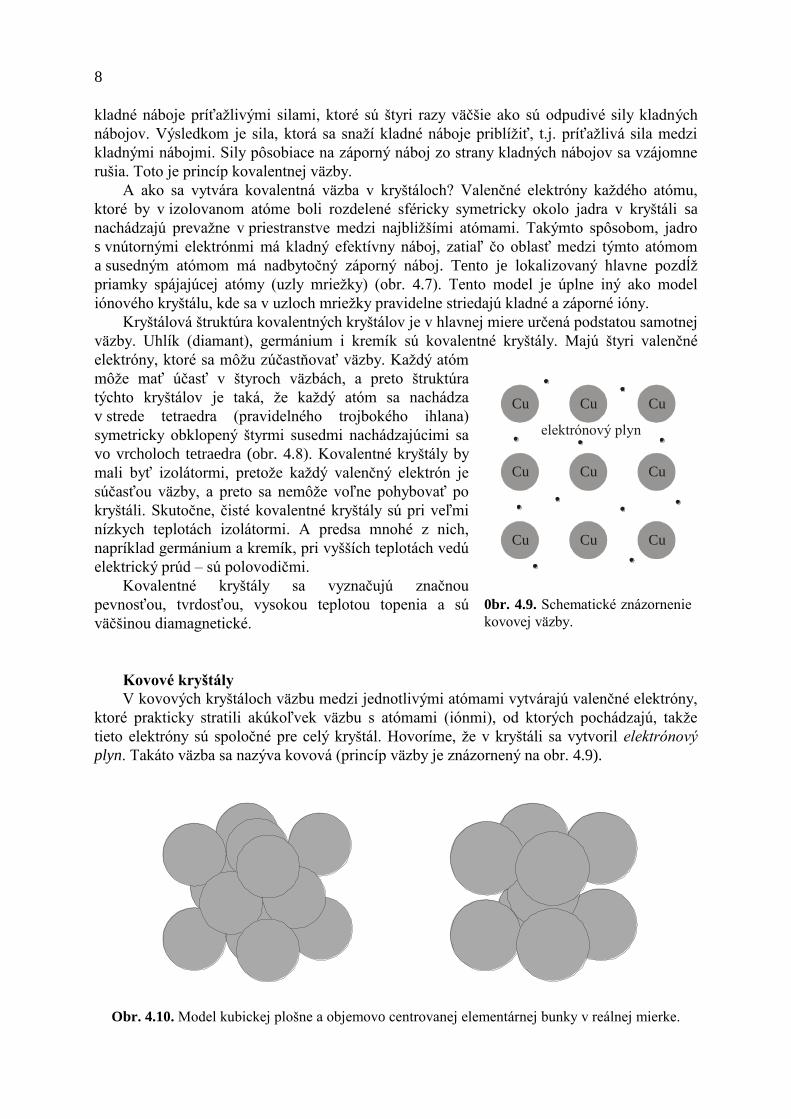
8
kladné náboje príťaţlivými silami, ktoré sú štyri razy väčšie ako sú odpudivé sily kladných
nábojov. Výsledkom je sila, ktorá sa snaţí kladné náboje priblíţiť, t.j. príťaţlivá sila medzi
kladnými nábojmi. Sily pôsobiace na záporný náboj zo strany kladných nábojov sa vzájomne
rušia. Toto je princíp kovalentnej väzby.
A ako sa vytvára kovalentná väzba v kryštáloch? Valenčné elektróny kaţdého atómu,
ktoré by v izolovanom atóme boli rozdelené sféricky symetricky okolo jadra v kryštáli sa
nachádzajú prevaţne v priestranstve medzi najbliţšími atómami. Takýmto spôsobom, jadro
s vnútornými elektrónmi má kladný efektívny náboj, zatiaľ čo oblasť medzi týmto atómom
a susedným atómom má nadbytočný záporný náboj. Tento je lokalizovaný hlavne pozdĺţ
priamky spájajúcej atómy (uzly mrieţky) (obr. 4.7). Tento model je úplne iný ako model
iónového kryštálu, kde sa v uzloch mrieţky pravidelne striedajú kladné a záporné ióny.
Kryštálová štruktúra kovalentných kryštálov je v hlavnej miere určená podstatou samotnej
väzby. Uhlík (diamant), germánium i kremík sú kovalentné kryštály. Majú štyri valenčné
elektróny, ktoré sa môţu zúčastňovať väzby. Kaţdý atóm
môţe mať účasť v štyroch väzbách, a preto štruktúra
týchto kryštálov je taká, ţe kaţdý atóm sa nachádza
v strede tetraedra (pravidelného trojbokého ihlana)
symetricky obklopený štyrmi susedmi nachádzajúcimi sa
vo vrcholoch tetraedra (obr. 4.8). Kovalentné kryštály by
mali byť izolátormi, pretoţe kaţdý valenčný elektrón je
súčasťou väzby, a preto sa nemôţe voľne pohybovať po
kryštáli. Skutočne, čisté kovalentné kryštály sú pri veľmi
nízkych teplotách izolátormi. A predsa mnohé z nich,
napríklad germánium a kremík, pri vyšších teplotách vedú
elektrický prúd – sú polovodičmi.
Kovalentné kryštály sa vyznačujú značnou
pevnosťou, tvrdosťou, vysokou teplotou topenia a sú
väčšinou diamagnetické.
Kovové kryštály
V kovových kryštáloch väzbu medzi jednotlivými atómami vytvárajú valenčné elektróny,
ktoré prakticky stratili akúkoľvek väzbu s atómami (iónmi), od ktorých pochádzajú, takţe
tieto elektróny sú spoločné pre celý kryštál. Hovoríme, ţe v kryštáli sa vytvoril elektrónový
plyn. Takáto väzba sa nazýva kovová (princíp väzby je znázornený na obr. 4.9).
0br. 4.9. Schematické znázornenie
kovovej väzby.
Obr. 4.10. Model kubickej plošne a objemovo centrovanej elementárnej bunky v reálnej mierke.
Cu Cu Cu
Cu Cu Cu
Cu Cu Cu
elektrónový plyn

9
Typickou elementárnou bunkou pre kovy je kocka s atómami v strede stien alebo
s atómom uprostred (plošne resp. objemovo centrovaná kubická mrieţka) (obr. 4.10). Kovy sa
vyznačujú veľkou elektrickou a tepelnou vodivosťou. Je to ľahko pochopiteľné, ak si
uvedomíme, ţe v kovoch sú elektróny prakticky voľné, môţu sa neobmedzene pohybovať cez
celý kryštál. Kovy sú nepriehľadné, vyznačujú sa charakteristickým kovovým leskom. Sú
menej pevné ako iónové a kovalentné kryštály, sú tvárne.
4.2.3 Hustota kryštálu a medziatómové vzdialenosti
Makroskopická hustota kryštálu závisí od hmotnosti atómov, od ich priemeru a okrem
toho, od kryštálovej štruktúry, ktorá určuje ako tesne sú usporiadané atómy. Ozrejmíme si to
na príklade prostej kubickej mrieţky. Elementárna bunka prostej kubickej mrieţky má tvar
kocky, vo vrcholoch ktorej sa nachádzajú atómy. Označme dĺţku hrany kocky ako a (táto
veličina sa nazýva mriežková konštanta). Potom
d a ,
kde d je priemer atómu, pretoţe dĺţka hrany kocky je rovná vzdialenosti medzi najbliţšími
atómami. Predpokladáme, ţe atómy sú tuhé gule, ktoré sa vzájomne dotýkajú.
Ak uváţime, ţe kaţdý atóm nachádzajúci sa vo vrchole kocky patrí ôsmim kockám (vo
vrchole sa stýka osem kociek), potom kaţdý atóm patrí vybranej kocke len jednou osminou.
Takýchto atómov je osem (osem vrcholov), preto na vybranú kocku pripadá celkove jeden
Tabuľka 4.2. Počty atómov v elementárnej bunke niektorých štruktúr
Štruktúra Počet atómov v elemen-
tárnej bunke
Kubická – prostá 1
Kubická – objemovo centrovaná 2
Kubická – plošne centrovaná 4
Diamantová (obr. 4.8) 8
atóm. Počet atómov pripadajúcich na elementárnu bunku niektorých kryštalických štruktúr je
uvedený v tabuľke 4.2. Teda na atóm v prostej kubickej mrieţke pripadá objem a3. Hmotnosť
atómu vypočítame zo vzťahu m M m AN , kde Mm je molová hmotnosť príslušnej látky a
NA – Avogadrova konštanta. Potom hustota v prípade prostej kubickej mrieţky je
M
a
m
AN 3.
V ďalšom si na niekoľkých príkladoch ukáţeme výpočet niektorých zaujímavých veličín
súvisiacich so štruktúrou látky.
Príklad 1. Zlato má hustotu 19,32 g/cm3, relatívnu atómovú hmotnosť 197 a plošne
centrovanú kubickú mrieţku. Vypočítajte:
a) počet atómov zlata v 1 cm3,
b) mrieţkovú konštantu,
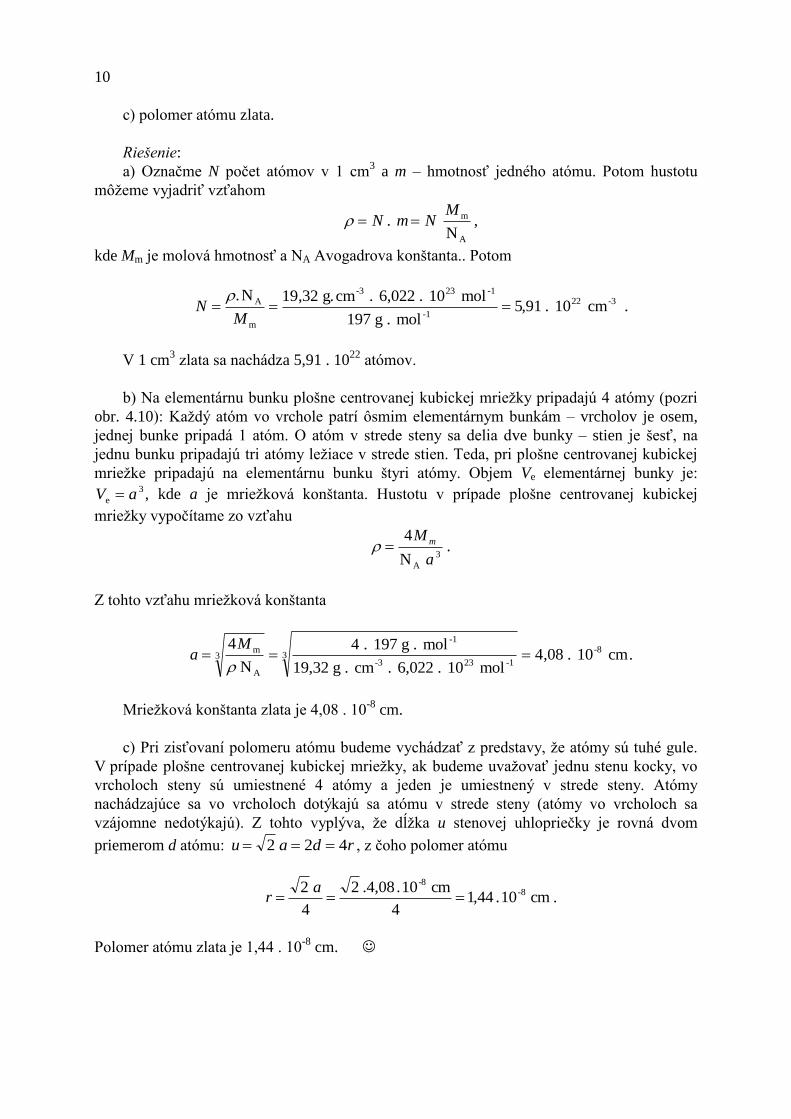
10
c) polomer atómu zlata.
Riešenie:
a) Označme N počet atómov v 1 cm3 a m – hmotnosť jedného atómu. Potom hustotu
môţeme vyjadriť vzťahom
N m NM
. N
m
A
,
kde Mm je molová hmotnosť a NA Avogadrova konštanta.. Potom
NM
. , . .
,N g cm 6,022 . 10 mol
197 g . mol . 10 cm A
m
-3 23 -1
-1
22 -319 325 91 .
V 1 cm3 zlata sa nachádza 5,91 . 10
22 atómov.
b) Na elementárnu bunku plošne centrovanej kubickej mrieţky pripadajú 4 atómy (pozri
obr. 4.10): Kaţdý atóm vo vrchole patrí ôsmim elementárnym bunkám – vrcholov je osem,
jednej bunke pripadá 1 atóm. O atóm v strede steny sa delia dve bunky – stien je šesť, na
jednu bunku pripadajú tri atómy leţiace v strede stien. Teda, pri plošne centrovanej kubickej
mrieţke pripadajú na elementárnu bunku štyri atómy. Objem Ve elementárnej bunky je:
V ae 3 , kde a je mrieţková konštanta. Hustotu v prípade plošne centrovanej kubickej
mrieţky vypočítame zo vzťahu
4
3
M
a
m
N A
.
Z tohto vzťahu mrieţková konštanta
aM
4 4
4 083 3m
A
-1
-3 23 -1
-8
N
. 197 g . mol
19,32 g . cm . 6,022 . 10 mol . 10 cm
, .
Mrieţková konštanta zlata je 4,08 . 10-8
cm.
c) Pri zisťovaní polomeru atómu budeme vychádzať z predstavy, ţe atómy sú tuhé gule.
V prípade plošne centrovanej kubickej mrieţky, ak budeme uvaţovať jednu stenu kocky, vo
vrcholoch steny sú umiestnené 4 atómy a jeden je umiestnený v strede steny. Atómy
nachádzajúce sa vo vrcholoch dotýkajú sa atómu v strede steny (atómy vo vrcholoch sa
vzájomne nedotýkajú). Z tohto vyplýva, ţe dĺţka u stenovej uhlopriečky je rovná dvom
priemerom d atómu: u a d r 2 2 4 , z čoho polomer atómu
cm 10 . 44,14
cm 10 . .4,08 2
4
2 8--8
a
r .
Polomer atómu zlata je 1,44 . 10-8
cm.

11
Príklad 2. Ukáţte, ţe časť objemu zaplnená atómami (povaţujte ich za tuhé gule)
rozloţenými v uzloch nasledujúcich mrieţok je:
a) 6
π v prostej kubickej mrieţke,
b) 8
π3 v objemovo centrovanej kubickej mrieţke,
c) 6
π2 v plošne centrovanej kubickej mrieţke.
Riešenie:
a) Na elementárnu bunku prostej kubickej mrieţky pripadá jeden atóm. Jeho objem je
3
31
2
a π
3
4 π
3
4
rV ,
lebo r a 2 , kde a je mrieţková konštanta – dĺţka hrany elementárnej bunky. Objem
elementárnej bunky je 3e aV . Teda časť objemu elementárnej bunky zaplnená atómami
6
π2 π
3
4
3
3
e
1
a
a
V
V.
b) Na elementárnu bunku objemovo centrovanej kubickej mrieţky pripadajú dva atómy.
Ich objem je 3
312
4
3 π
3
8 π
3
4 . 2 2
arVV ,
lebo 4 3=4t aur , kde ut je telesná uhlopriečka elementárnej bunky (kocky). Teda časť
objemu zaplnená atómami
8
π34
3 π
3
8
3e
2
a
a
V
V.
c) Na elementárnu bunku plošne centrovanej kubickej mrieţky pripadajú 4 atómy. Ich
objem je 3
314
4
2 π
3
16 π
3
4 . 4 4
arVV ,
lebo r u a 4 2 4 , kde u je stenová uhlopriečka. Časť objemu elementárnej bunky
zaplnená atómami

12
6
24
2 π
3
16
3
3
e
4 a
a
a
V
V
.
Príklad 3. Určte mrieţkovú konštantu kryštálu NaCl. Hustota NaCl je 2,16 g/cm3.
Riešenie:
Štruktúra kryštálu NaCl (obr. 4.11), ak by sme zanedbali
rozdiel medzi druhmi iónov, by vyzerala ako prostá kubická
štruktúra. Keď uvaţujeme len jeden druh iónov je to plošne
centrovaná kubická štruktúra (viď ióny chlóru). Na túto štruktúru
moţno nazerať aj tak, ţe mrieţka bude plošne centrovaná
kubická, v ktorej uzlových bodoch sú umiestnené molekuly
NaCl.
Z obr. 4.11 je zrejmé, ţe súčet polomerov iónov Na+ a Cl
- je
rovný polovici dĺţky hrany kocky (polovici mrieţkovej
konštanty)
r r a1 2 2 ,
kde r1 a r2 sú polomery iónov. Elementárna bunka obsahuje štyri ióny Na+ a štyri ióny Cl
-.
Preto
4
3
N
m
A
M
a,
kde Mm = 58,44 g/mol je molová hmotnosť NaCl. Z tejto rovnice mrieţková konštanta
aM
4 45 643 3
8
N
. 58,44 g . mol
2,16 g . cm . 6,022 . 10 mol . 10 cmm
A
-1
-3 23 -1, .
Mrieţková konštanta NaCl je 5,64 . 10-8
cm.
4.2.4 Poruchy kryštálovej štruktúry
Obr. 4.11. Štruktúra kryš-
tálu NaCl.

13
Ako sme uţ skôr spomínali, v ideálnom kryštáli sa pravidelne opakujú rovnaké štruktúrne
jednotky (atómy, resp molekuly) v celom jeho objeme. V reálnych kryštáloch však vţdy
existuje odklon od ideálneho pravidla: jeden uzol – jeden atóm, resp. jedna molekula. Z názvu
tejto časti „poruchy“ by sa mohlo zdať, ţe je to vţdy len negatívny jav. Nie je však tomu tak.
Áno, niekedy sú poruchy (iným slovami defekty) neţiaduce, ale v mnohých prípadoch sa
vyvolávajú umelo s cieľom zlepšiť vlastnosti materiálov alebo dokonca dodať materiálom
nové poţadované vlastnosti. Bez porúch v mrieţke by neboli napr. moţné aj také javy ako je
difúzia v tuhých látkach a plastická deformácia materiálov. Od prítomnosti porúch závisia
i iné vlastnosti materiálov, napr. tepelná i elektrická vodivosť.
V závislosti od veľkosti porušenej oblasti delíme defekty v kryštáli na bodové, čiarové
a plošné. Medzi bodové defekty
kryštálovej mrieţky patrí vakancia
(chýbajúci atóm v uzle), atóm
nachádzajúci sa v intersticiálnej
polohe (medzi uzlami) a substitučný
atóm (atóm iného prvku nahradzujúci
v uzle mrieţky pôvodný atóm), pozri
obr. 4.12. Atóm nachádzajúci sa
v medziuzlí môţe byť atóm pôvodnej
alebo aj inej látky.
Čiarové poruchy nazývame aj
dislokácie. Základnými druhmi
dislokácií sú hranová dislokácia
a špirálová dislokácia. Začneme
s opisom hranovej dislokácie.
Predstavme si, ţe jedna z atómových
rovín (rovina R na obr. 4.13a) sa nerozprestiera cez celý kryštál ale je ukončená v jeho vnútri.
Kraj (hrana) tejto roviny vytvára lineárny defekt, ktorý nazývame hranová dislokácia. Na obr.
4.13b je zobrazené rozmiestnenie atómov v rovine kolmej na hranovú dislokáciu. Tam, kde sa
„neúplná“ atómová rovina končí (bod O) sa nachádza dislokácia – je kolmá na rovinu
nákresne. Atómový rad
1, ktorý prechádza cez
bod O má o jeden atóm
viac ako atómový rad 2
nachádzajúci sa niţšie. Preto v rade 1 je v okolí dislokácie vzdialenosť medzi atómami menšia
ako normálna a v rade 2 väčšia ako normálna v dôsledku čoho je kryštál v okolí dislokácie
deformovaný.
Obr. 4.12. Bodové defekty kryštálovej mrieţky: a) vakancia, b) substitučný atóm,
c) intersticiálna poloha.
Obr. 4.13. Hranová dislokácia je v mieste O kolmo na
rovinu nákresne.
Obr. 4.14. Pohyb hranovej dislokácie cez kryštál. a b c
a
R
O1
2
b
F F
-F -F
Rovina pohybu dislokácie
1 2 3
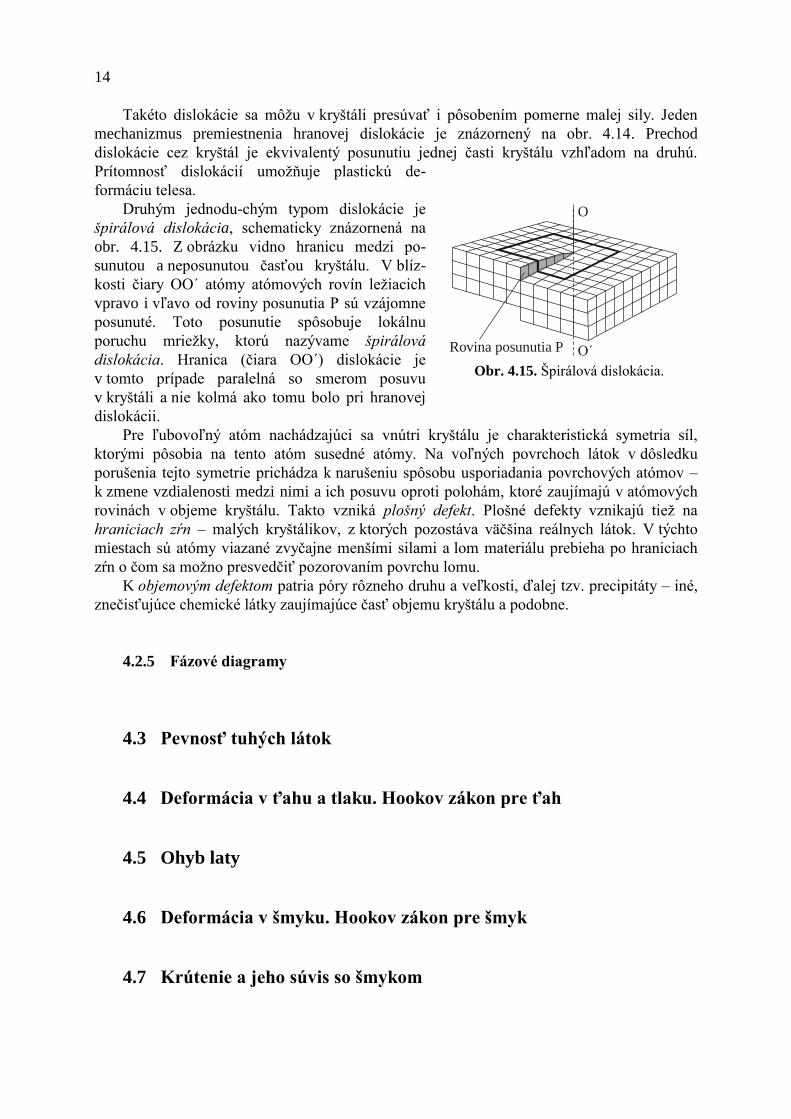
14
Takéto dislokácie sa môţu v kryštáli presúvať i pôsobením pomerne malej sily. Jeden
mechanizmus premiestnenia hranovej dislokácie je znázornený na obr. 4.14. Prechod
dislokácie cez kryštál je ekvivalentý posunutiu jednej časti kryštálu vzhľadom na druhú.
Prítomnosť dislokácií umoţňuje plastickú de-
formáciu telesa.
Druhým jednodu-chým typom dislokácie je
špirálová dislokácia, schematicky znázornená na
obr. 4.15. Z obrázku vidno hranicu medzi po-
sunutou a neposunutou časťou kryštálu. V blíz-
kosti čiary OO´ atómy atómových rovín leţiacich
vpravo i vľavo od roviny posunutia P sú vzájomne
posunuté. Toto posunutie spôsobuje lokálnu
poruchu mrieţky, ktorú nazývame špirálová
dislokácia. Hranica (čiara OO´) dislokácie je
v tomto prípade paralelná so smerom posuvu
v kryštáli a nie kolmá ako tomu bolo pri hranovej
dislokácii.
Pre ľubovoľný atóm nachádzajúci sa vnútri kryštálu je charakteristická symetria síl,
ktorými pôsobia na tento atóm susedné atómy. Na voľných povrchoch látok v dôsledku
porušenia tejto symetrie prichádza k narušeniu spôsobu usporiadania povrchových atómov –
k zmene vzdialenosti medzi nimi a ich posuvu oproti polohám, ktoré zaujímajú v atómových
rovinách v objeme kryštálu. Takto vzniká plošný defekt. Plošné defekty vznikajú tieţ na
hraniciach zŕn – malých kryštálikov, z ktorých pozostáva väčšina reálnych látok. V týchto
miestach sú atómy viazané zvyčajne menšími silami a lom materiálu prebieha po hraniciach
zŕn o čom sa moţno presvedčiť pozorovaním povrchu lomu.
K objemovým defektom patria póry rôzneho druhu a veľkosti, ďalej tzv. precipitáty – iné,
znečisťujúce chemické látky zaujímajúce časť objemu kryštálu a podobne.
4.2.5 Fázové diagramy
4.3 Pevnosť tuhých látok
4.4 Deformácia v ťahu a tlaku. Hookov zákon pre ťah
4.5 Ohyb laty
4.6 Deformácia v šmyku. Hookov zákon pre šmyk
4.7 Krútenie a jeho súvis so šmykom
Obr. 4.15. Špirálová dislokácia.
O
O´Rovina posunutia P

15
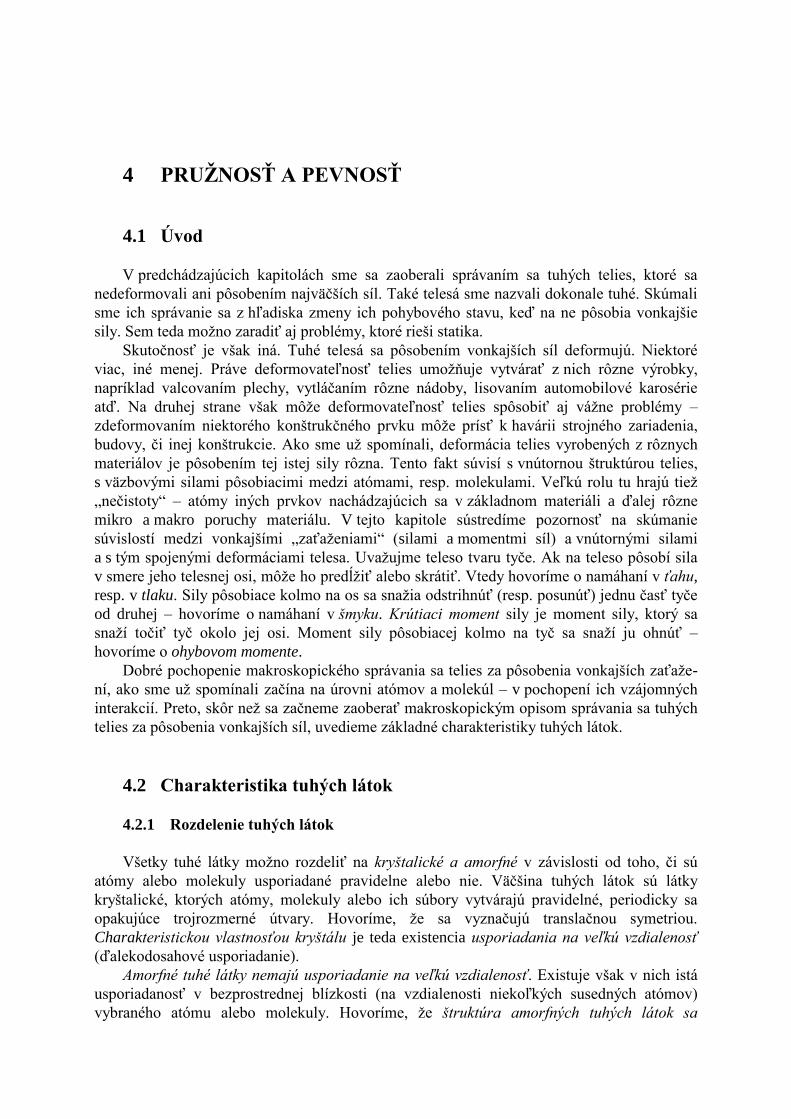
4 PRUŢNOSŤ A PEVNOSŤ
4.1 Úvod
V predchádzajúcich kapitolách sme sa zaoberali správaním sa tuhých telies, ktoré sa
nedeformovali ani pôsobením najväčších síl. Také telesá sme nazvali dokonale tuhé. Skúmali
sme ich správanie sa z hľadiska zmeny ich pohybového stavu, keď na ne pôsobia vonkajšie
sily. Sem teda moţno zaradiť aj problémy, ktoré rieši statika.
Skutočnosť je však iná. Tuhé telesá sa pôsobením vonkajších síl deformujú. Niektoré
viac, iné menej. Práve deformovateľnosť telies umoţňuje vytvárať z nich rôzne výrobky,
napríklad valcovaním plechy, vytláčaním rôzne nádoby, lisovaním automobilové karosérie
atď. Na druhej strane však môţe deformovateľnosť telies spôsobiť aj váţne problémy –
zdeformovaním niektorého konštrukčného prvku môţe prísť k havárii strojného zariadenia,
budovy, či inej konštrukcie. Ako sme uţ spomínali, deformácia telies vyrobených z rôznych
materiálov je pôsobením tej istej sily rôzna. Tento fakt súvisí s vnútornou štruktúrou telies,
s väzbovými silami pôsobiacimi medzi atómami, resp. molekulami. Veľkú rolu tu hrajú tieţ
„nečistoty“ – atómy iných prvkov nachádzajúcich sa v základnom materiáli a ďalej rôzne
mikro a makro poruchy materiálu. V tejto kapitole sústredíme pozornosť na skúmanie
súvislostí medzi vonkajšími „zaťaţeniami“ (silami a momentmi síl) a vnútornými silami
a s tým spojenými deformáciami telesa. Uvaţujme teleso tvaru tyče. Ak na teleso pôsobí sila
v smere jeho telesnej osi, môţe ho predĺţiť alebo skrátiť. Vtedy hovoríme o namáhaní v ťahu,
resp. v tlaku. Sily pôsobiace kolmo na os sa snaţia odstrihnúť (resp. posunúť) jednu časť tyče
od druhej – hovoríme o namáhaní v šmyku. Krútiaci moment sily je moment sily, ktorý sa
snaţí točiť tyč okolo jej osi. Moment sily pôsobiacej kolmo na tyč sa snaţí ju ohnúť –
hovoríme o ohybovom momente.
Dobré pochopenie makroskopického správania sa telies za pôsobenia vonkajších zaťaţe-
ní, ako sme uţ spomínali začína na úrovni atómov a molekúl – v pochopení ich vzájomných
interakcií. Preto, skôr neţ sa začneme zaoberať makroskopickým opisom správania sa tuhých
telies za pôsobenia vonkajších síl, uvedieme základné charakteristiky tuhých látok.
4.2 Charakteristika tuhých látok
4.2.1 Rozdelenie tuhých látok
Všetky tuhé látky moţno rozdeliť na kryštalické a amorfné v závislosti od toho, či sú
atómy alebo molekuly usporiadané pravidelne alebo nie. Väčšina tuhých látok sú látky
kryštalické, ktorých atómy, molekuly alebo ich súbory vytvárajú pravidelné, periodicky sa
opakujúce trojrozmerné útvary. Hovoríme, ţe sa vyznačujú translačnou symetriou.
Charakteristickou vlastnosťou kryštálu je teda existencia usporiadania na veľkú vzdialenosť
(ďalekodosahové usporiadanie).
Amorfné tuhé látky nemajú usporiadanie na veľkú vzdialenosť. Existuje však v nich istá
usporiadanosť v bezprostrednej blízkosti (na vzdialenosti niekoľkých susedných atómov)
vybraného atómu alebo molekuly. Hovoríme, ţe štruktúra amorfných tuhých látok sa
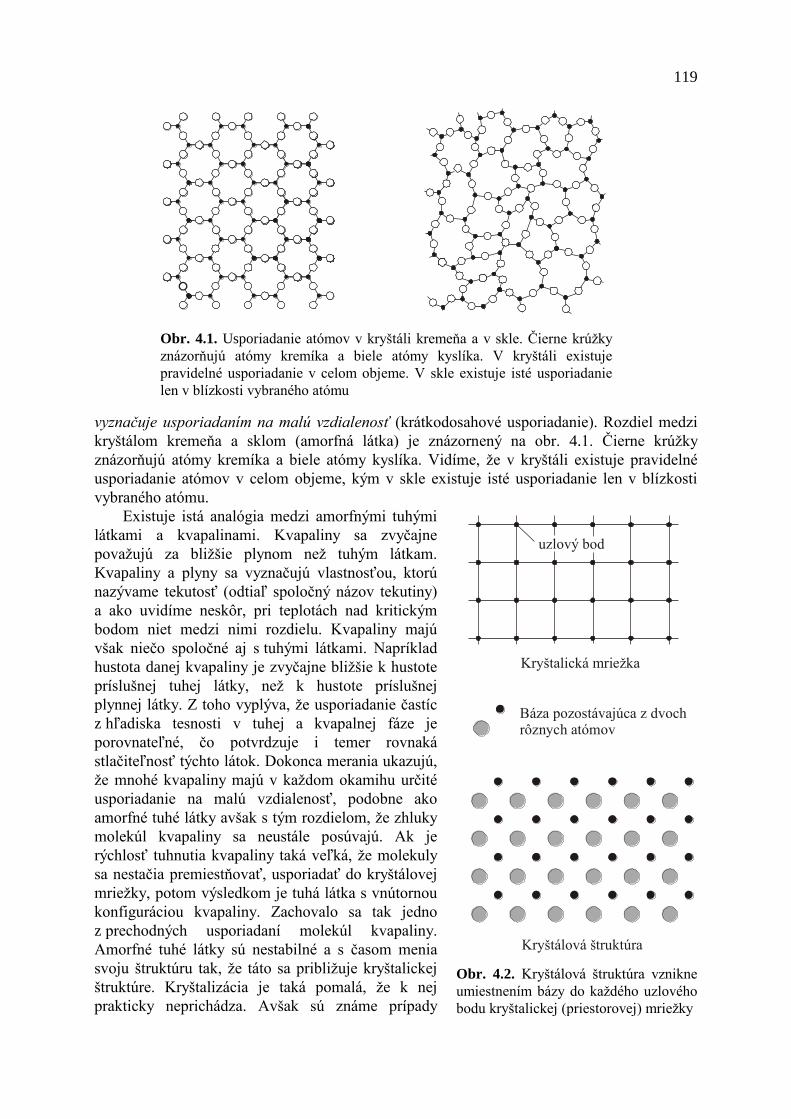
119
vyznačuje usporiadaním na malú vzdialenosť (krátkodosahové usporiadanie). Rozdiel medzi
kryštálom kremeňa a sklom (amorfná látka) je znázornený na obr. 4.1. Čierne krúţky
znázorňujú atómy kremíka a biele atómy kyslíka. Vidíme, ţe v kryštáli existuje pravidelné
usporiadanie atómov v celom objeme, kým v skle existuje isté usporiadanie len v blízkosti
vybraného atómu.
Existuje istá analógia medzi amorfnými tuhými
látkami a kvapalinami. Kvapaliny sa zvyčajne
povaţujú za bliţšie plynom neţ tuhým látkam.
Kvapaliny a plyny sa vyznačujú vlastnosťou, ktorú
nazývame tekutosť (odtiaľ spoločný názov tekutiny)
a ako uvidíme neskôr, pri teplotách nad kritickým
bodom niet medzi nimi rozdielu. Kvapaliny majú
však niečo spoločné aj s tuhými látkami. Napríklad
hustota danej kvapaliny je zvyčajne bliţšie k hustote
príslušnej tuhej látky, neţ k hustote príslušnej
plynnej látky. Z toho vyplýva, ţe usporiadanie častíc
z hľadiska tesnosti v tuhej a kvapalnej fáze je
porovnateľné, čo potvrdzuje i temer rovnaká
stlačiteľnosť týchto látok. Dokonca merania ukazujú,
ţe mnohé kvapaliny majú v kaţdom okamihu určité
usporiadanie na malú vzdialenosť, podobne ako
amorfné tuhé látky avšak s tým rozdielom, ţe zhluky
molekúl kvapaliny sa neustále posúvajú. Ak je
rýchlosť tuhnutia kvapaliny taká veľká, ţe molekuly
sa nestačia premiestňovať, usporiadať do kryštálovej
mrieţky, potom výsledkom je tuhá látka s vnútornou
konfiguráciou kvapaliny. Zachovalo sa tak jedno
z prechodných usporiadaní molekúl kvapaliny.
Amorfné tuhé látky sú nestabilné a s časom menia
svoju štruktúru tak, ţe táto sa pribliţuje kryštalickej
štruktúre. Kryštalizácia je taká pomalá, ţe k nej
prakticky neprichádza. Avšak sú známe prípady
Obr. 4.1. Usporiadanie atómov v kryštáli kremeňa a v skle. Čierne krúţky
znázorňujú atómy kremíka a biele atómy kyslíka. V kryštáli existuje
pravidelné usporiadanie v celom objeme. V skle existuje isté usporiadanie
len v blízkosti vybraného atómu
Obr. 4.2. Kryštálová štruktúra vznikne
umiestnením bázy do kaţdého uzlového
bodu kryštalickej (priestorovej) mrieţky
Kryštalická mrieţka
Báza pozostávajúca z dvochrôznych atómov
Kryštálová štruktúra
uzlový bod

120
starých vzoriek skla (niekoľko sto rokov), ktoré skryštalizovali. Proces kryštalizácie skla sa dá
urýchliť ohriatím na teplotu jeho mäknutia.
Kryštalické látky delíme z hľadiska toho, či pozostávajú len z jedného obrovského
kryštálu alebo zo súboru maličkých kryštálikov – zŕn na monokryštalické a polykryštalické.
Pritom tá istá látka sa môţe nachádzať v jednej aj druhej modifikácii. Väčšina kryštalických
látok sú polykryštály, teda skladajú sa z maličkých kryštalických zŕn. Na hraniciach zŕn sa
mení orientácia kryštálovej štruktúry a keďţe zrná sú usporiadané viac-menej náhodne,
vlastnosti takýchto látok sú väčšinou vo všetkých smeroch rovnaké – sú to látky izotrópne.
Naproti tomu mnohé monokryštalické látky sa vyznačujú anizotrópiou (ich vlastnosti sa líšia
v rozdielnych smeroch).
Ideálny kryštál moţno vytvoriť pravidelným opakovaním rovnakých štruktúrnych
jednotiek v celom priestore. V najjednoduchších kryštáloch, napríklad v kryštáloch medi,
striebra, zlata, je štruktúrna jednotka tvorená len jedným atómom. V kryštáloch zloţitejších
látok môţe štruktúrna jednotka obsahovať niekoľko atómov alebo molekúl. Táto štruktúrna
jednotka sa nazýva bázou. Bázu, z hľadiska priestorového usporiadania kryštálu, môţeme
nahradiť jedným bodom, ktorý nazývame uzlovým bodom. Uzlové body určujú kryštalickú
(priestorovú) mriežku. Kryštalická mrieţka a báza určujú kryštálovú štruktúru (obr. 4.2)1.
Rôzne látky majú rôzne kryštalické mrieţky.
Kryštálovú štruktúru opisujeme pomocou v priestore periodicky sa opakujúcej
elementárnej časti kryštalickej mrieţky, ktorú nazývame elementárnou bunkou. Táto
elementárna bunka môţe mať napríklad tvar kocky, pravidelného dodekaedra alebo
ľubovoľného rovnobeţnostena (hranola).
Kryštalické mrieţky (polohy uzlových bodov) sa konštruujú pomocou troch základných
nekomplanárnych vektorov translácie (posunutia) a, b, c. Úkon posunutia bodu o vektor T sa
nazýva operáciou translácie, obr. 4.3. Potom
kryštalickú mrieţku môţeme zostrojiť pouţitím
všetkých operácií translácie tvaru
cbaT 321 nnn (4.1)
(n1, n2, n3 sú celé čísla) vzhľadom napríklad na
začiatok súradníc.
Rovnobeţnosten zostrojený pomocou
základných vektorov sa nazýva základná bunka
alebo primitívna bunka (obr. 4.3). Má tú
vlastnosť, ţe uzly mrieţky sa nachádzajú len v jej
vrcholoch. Základná bunka nie je vţdy
najvhodnejším stavebným blokom kryštálu,
pretoţe mnohokrát nevystihuje úplne symetriu
mrieţky. Existuje veľké mnoţstvo tvarov
a rozmerov ako základných, tak i elementárnych buniek. Avšak tieto bunky môţu byť
klasifikované podľa ich vlastností symetrie. Symetria je veľmi dôleţitá vlastnosť
kryštalického tuhého telesa, ktorá sa prejavuje napríklad v jeho elastických, magnetických,
elektrických a tepelných vlastnostiach, odráţa symetriu mrieţky a určuje sa pomocou nej.
1 Uvedomme si, ţe kryštalická mrieţka je matematická abstrakcia, zatiaľ čo kryštálová štruktúra vzniká len vtedy,
keď s kaţdým uzlovým bodom mrieţky je spätá báza.
Obr. 4.3. Primitívna bunka kryštalickej mrieţky
T = a + b - c 2
a
b
c
0

121
Teda z dôvodu symetrie sa častokrát vyberajú iné elementárne bunky namiesto základných
buniek.
Elementárne bunky moţno rozdeliť do 14 kategórií odpovedajúcich 14 moţným rôznym
priestorovým mrieţkam. Tieto mrieţky nazývame Bravaisovými (bravého) mrieţkami
(obr. 4.4). Ku konštrukcii 14 Bravaisových mrieţok stačia osi siedmich typov, čo vedie ku
klasifikácii všetkých kryštálov do 7 kryštalografických sústav. Tieto kryštalografické sústavy
majú nasledujúce vlastnosti:
Obr. 4.4. Kryštalografické sústavy a typy Bravaisových priestorových mrieţok:
a) kubická – a b c , 90o, prostá, priestorove centrovaná, plošne
centrovaná; b) tetragonálna – a b c , 90o, prostá, priestorove
centrovaná; c) hexagonálna – a b c , 90 = =o o 120 ; d) trigonálna –
a b c , = = 90 o; e) rombická – 90=== ,cba , prostá, bazálne
centrovaná, priestorove centrovaná, plošne centrovaná; f) monoklinická – a b c , 9090 , prostá, bazálne centrovaná; g) triklinická – a b c ,
a
a
b
b
c
c
a
a
b
a
ab
b
cc
c d
e
f g
ab
b
g
g
g
g
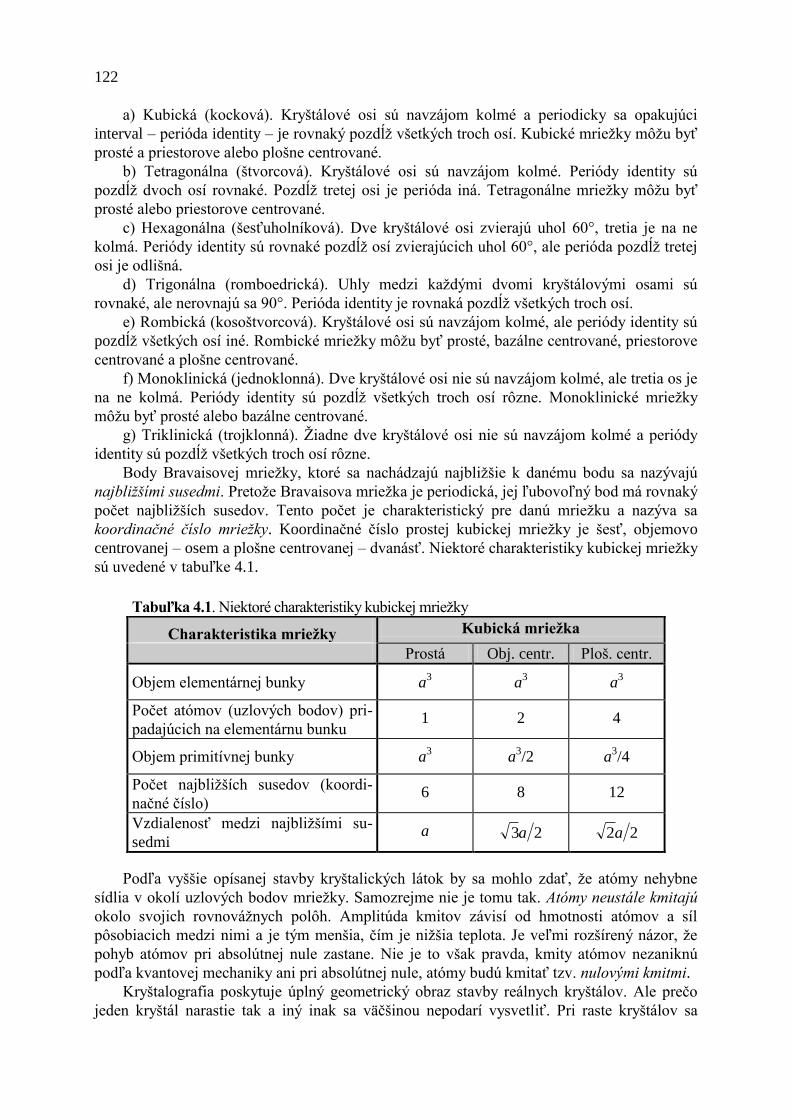
122
a) Kubická (kocková). Kryštálové osi sú navzájom kolmé a periodicky sa opakujúci
interval – perióda identity – je rovnaký pozdĺţ všetkých troch osí. Kubické mrieţky môţu byť
prosté a priestorove alebo plošne centrované.
b) Tetragonálna (štvorcová). Kryštálové osi sú navzájom kolmé. Periódy identity sú
pozdĺţ dvoch osí rovnaké. Pozdĺţ tretej osi je perióda iná. Tetragonálne mrieţky môţu byť
prosté alebo priestorove centrované.
c) Hexagonálna (šesťuholníková). Dve kryštálové osi zvierajú uhol 60°, tretia je na ne
kolmá. Periódy identity sú rovnaké pozdĺţ osí zvierajúcich uhol 60°, ale perióda pozdĺţ tretej
osi je odlišná.
d) Trigonálna (romboedrická). Uhly medzi kaţdými dvomi kryštálovými osami sú
rovnaké, ale nerovnajú sa 90°. Perióda identity je rovnaká pozdĺţ všetkých troch osí.
e) Rombická (kosoštvorcová). Kryštálové osi sú navzájom kolmé, ale periódy identity sú
pozdĺţ všetkých osí iné. Rombické mrieţky môţu byť prosté, bazálne centrované, priestorove
centrované a plošne centrované.
f) Monoklinická (jednoklonná). Dve kryštálové osi nie sú navzájom kolmé, ale tretia os je
na ne kolmá. Periódy identity sú pozdĺţ všetkých troch osí rôzne. Monoklinické mrieţky
môţu byť prosté alebo bazálne centrované.
g) Triklinická (trojklonná). Ţiadne dve kryštálové osi nie sú navzájom kolmé a periódy
identity sú pozdĺţ všetkých troch osí rôzne.
Body Bravaisovej mrieţky, ktoré sa nachádzajú najbliţšie k danému bodu sa nazývajú
najbližšími susedmi. Pretoţe Bravaisova mrieţka je periodická, jej ľubovoľný bod má rovnaký
počet najbliţších susedov. Tento počet je charakteristický pre danú mrieţku a nazýva sa
koordinačné číslo mriežky. Koordinačné číslo prostej kubickej mrieţky je šesť, objemovo
centrovanej – osem a plošne centrovanej – dvanásť. Niektoré charakteristiky kubickej mrieţky
sú uvedené v tabuľke 4.1.
Podľa vyššie opísanej stavby kryštalických látok by sa mohlo zdať, ţe atómy nehybne
sídlia v okolí uzlových bodov mrieţky. Samozrejme nie je tomu tak. Atómy neustále kmitajú
okolo svojich rovnováţnych polôh. Amplitúda kmitov závisí od hmotnosti atómov a síl
pôsobiacich medzi nimi a je tým menšia, čím je niţšia teplota. Je veľmi rozšírený názor, ţe
pohyb atómov pri absolútnej nule zastane. Nie je to však pravda, kmity atómov nezaniknú
podľa kvantovej mechaniky ani pri absolútnej nule, atómy budú kmitať tzv. nulovými kmitmi.
Kryštalografia poskytuje úplný geometrický obraz stavby reálnych kryštálov. Ale prečo
jeden kryštál narastie tak a iný inak sa väčšinou nepodarí vysvetliť. Pri raste kryštálov sa
Tabuľka 4.1. Niektoré charakteristiky kubickej mrieţky
Charakteristika mrieţky
Kubická mrieţka
Prostá Obj. centr. Ploš. centr.
Objem elementárnej bunky a3 a
3 a
3
Počet atómov (uzlových bodov) pri-
padajúcich na elementárnu bunku 1 2 4
Objem primitívnej bunky a3 a
3/2 a
3/4
Počet najbliţších susedov (koordi-
načné číslo) 6 8 12
Vzdialenosť medzi najbliţšími su-
sedmi a
3 2a
2 2a
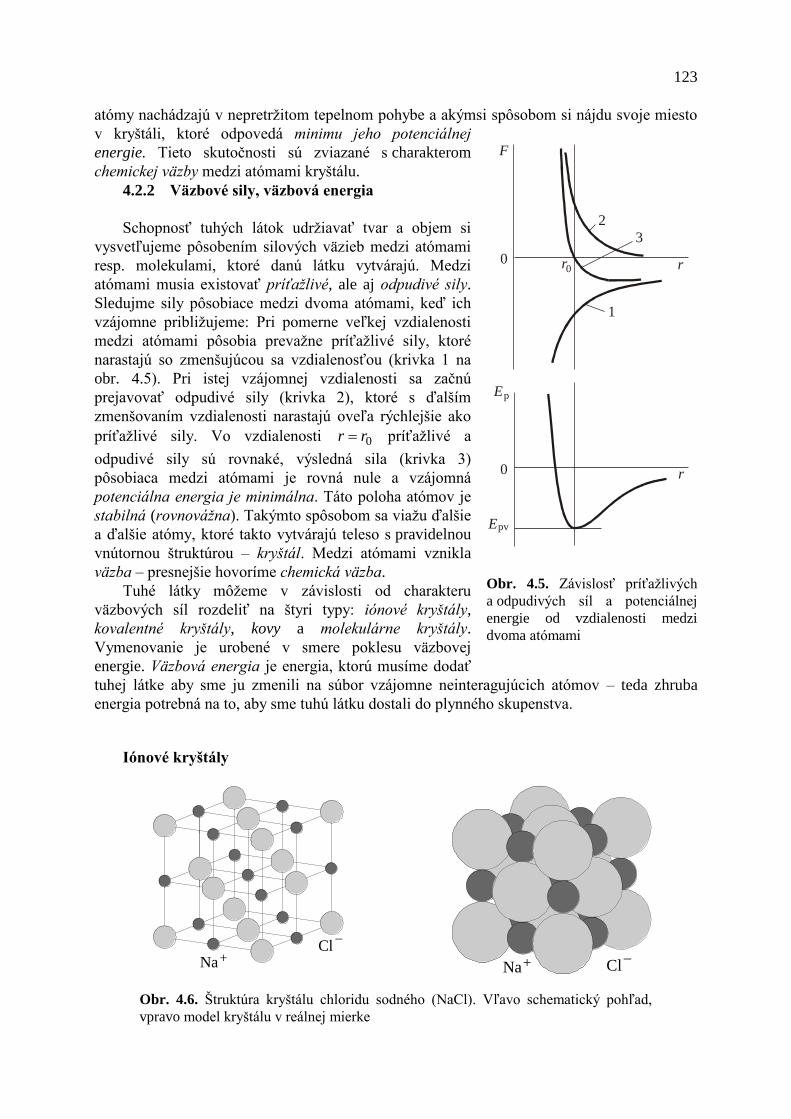
123
atómy nachádzajú v nepretrţitom tepelnom pohybe a akýmsi spôsobom si nájdu svoje miesto
v kryštáli, ktoré odpovedá minimu jeho potenciálnej
energie. Tieto skutočnosti sú zviazané s charakterom
chemickej väzby medzi atómami kryštálu.
4.2.2 Väzbové sily, väzbová energia
Schopnosť tuhých látok udrţiavať tvar a objem si
vysvetľujeme pôsobením silových väzieb medzi atómami
resp. molekulami, ktoré danú látku vytvárajú. Medzi
atómami musia existovať príťažlivé, ale aj odpudivé sily.
Sledujme sily pôsobiace medzi dvoma atómami, keď ich
vzájomne pribliţujeme: Pri pomerne veľkej vzdialenosti
medzi atómami pôsobia prevaţne príťaţlivé sily, ktoré
narastajú so zmenšujúcou sa vzdialenosťou (krivka 1 na
obr. 4.5). Pri istej vzájomnej vzdialenosti sa začnú
prejavovať odpudivé sily (krivka 2), ktoré s ďalším
zmenšovaním vzdialenosti narastajú oveľa rýchlejšie ako
príťaţlivé sily. Vo vzdialenosti 0rr príťaţlivé a
odpudivé sily sú rovnaké, výsledná sila (krivka 3)
pôsobiaca medzi atómami je rovná nule a vzájomná
potenciálna energia je minimálna. Táto poloha atómov je
stabilná (rovnovážna). Takýmto spôsobom sa viaţu ďalšie
a ďalšie atómy, ktoré takto vytvárajú teleso s pravidelnou
vnútornou štruktúrou – kryštál. Medzi atómami vznikla
väzba – presnejšie hovoríme chemická väzba.
Tuhé látky môţeme v závislosti od charakteru
väzbových síl rozdeliť na štyri typy: iónové kryštály,
kovalentné kryštály, kovy a molekulárne kryštály.
Vymenovanie je urobené v smere poklesu väzbovej
energie. Väzbová energia je energia, ktorú musíme dodať
tuhej látke aby sme ju zmenili na súbor vzájomne neinteragujúcich atómov – teda zhruba
energia potrebná na to, aby sme tuhú látku dostali do plynného skupenstva.
Iónové kryštály
Obr. 4.5. Závislosť príťaţlivých
a odpudivých síl a potenciálnej
energie od vzdialenosti medzi
dvoma atómami
Obr. 4.6. Štruktúra kryštálu chloridu sodného (NaCl). Vľavo schematický pohľad,
vpravo model kryštálu v reálnej mierke
r
r
2
1
3
0
0
F
r0
E
Ep
pv
+Cl
_
Na Na Cl+_
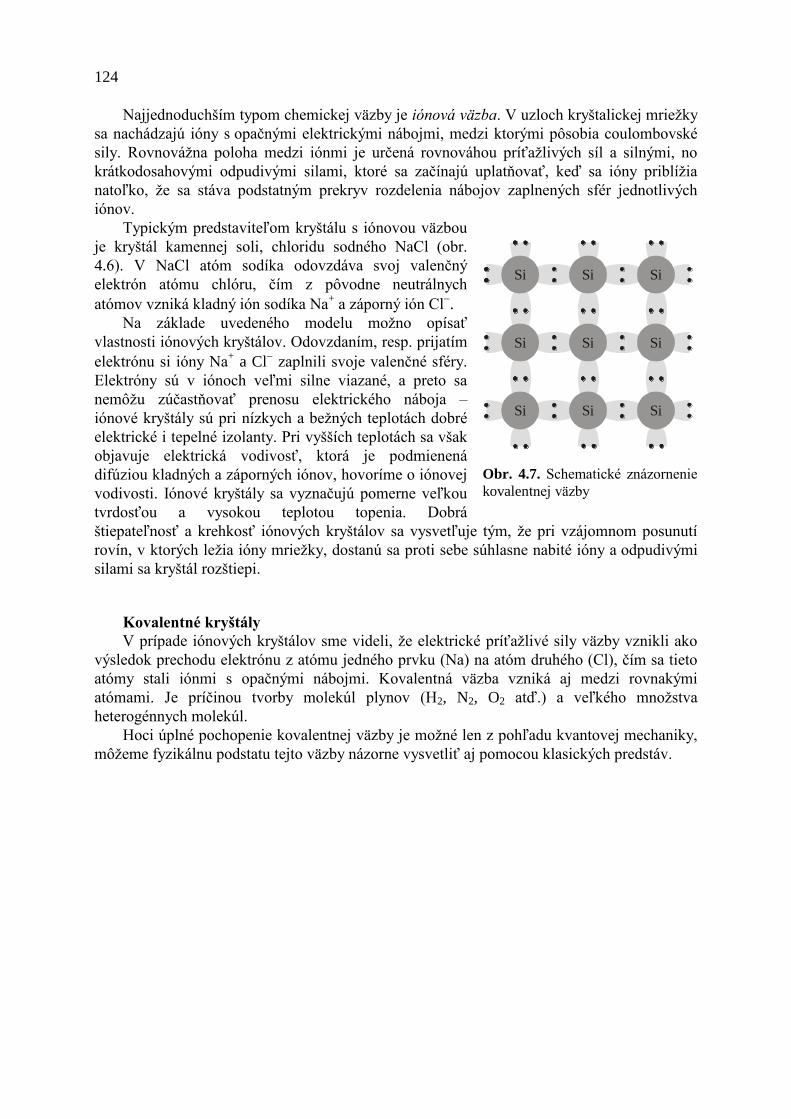
124
Najjednoduchším typom chemickej väzby je iónová väzba. V uzloch kryštalickej mrieţky
sa nachádzajú ióny s opačnými elektrickými nábojmi, medzi ktorými pôsobia coulombovské
sily. Rovnováţna poloha medzi iónmi je určená rovnováhou príťaţlivých síl a silnými, no
krátkodosahovými odpudivými silami, ktoré sa začínajú uplatňovať, keď sa ióny priblíţia
natoľko, ţe sa stáva podstatným prekryv rozdelenia nábojov zaplnených sfér jednotlivých
iónov.
Typickým predstaviteľom kryštálu s iónovou väzbou
je kryštál kamennej soli, chloridu sodného NaCl (obr.
4.6). V NaCl atóm sodíka odovzdáva svoj valenčný
elektrón atómu chlóru, čím z pôvodne neutrálnych
atómov vzniká kladný ión sodíka Na+ a záporný ión Cl
.
Na základe uvedeného modelu moţno opísať
vlastnosti iónových kryštálov. Odovzdaním, resp. prijatím
elektrónu si ióny Na+ a Cl
zaplnili svoje valenčné sféry.
Elektróny sú v iónoch veľmi silne viazané, a preto sa
nemôţu zúčastňovať prenosu elektrického náboja –
iónové kryštály sú pri nízkych a beţných teplotách dobré
elektrické i tepelné izolanty. Pri vyšších teplotách sa však
objavuje elektrická vodivosť, ktorá je podmienená
difúziou kladných a záporných iónov, hovoríme o iónovej
vodivosti. Iónové kryštály sa vyznačujú pomerne veľkou
tvrdosťou a vysokou teplotou topenia. Dobrá
štiepateľnosť a krehkosť iónových kryštálov sa vysvetľuje tým, ţe pri vzájomnom posunutí
rovín, v ktorých leţia ióny mrieţky, dostanú sa proti sebe súhlasne nabité ióny a odpudivými
silami sa kryštál rozštiepi.
Kovalentné kryštály
V prípade iónových kryštálov sme videli, ţe elektrické príťaţlivé sily väzby vznikli ako
výsledok prechodu elektrónu z atómu jedného prvku (Na) na atóm druhého (Cl), čím sa tieto
atómy stali iónmi s opačnými nábojmi. Kovalentná väzba vzniká aj medzi rovnakými
atómami. Je príčinou tvorby molekúl plynov (H2, N2, O2 atď.) a veľkého mnoţstva
heterogénnych molekúl.
Hoci úplné pochopenie kovalentnej väzby je moţné len z pohľadu kvantovej mechaniky,
môţeme fyzikálnu podstatu tejto väzby názorne vysvetliť aj pomocou klasických predstáv.
Obr. 4.7. Schematické znázornenie
kovalentnej väzby
Si
Si
Si Si Si
Si
Si
Si
Si
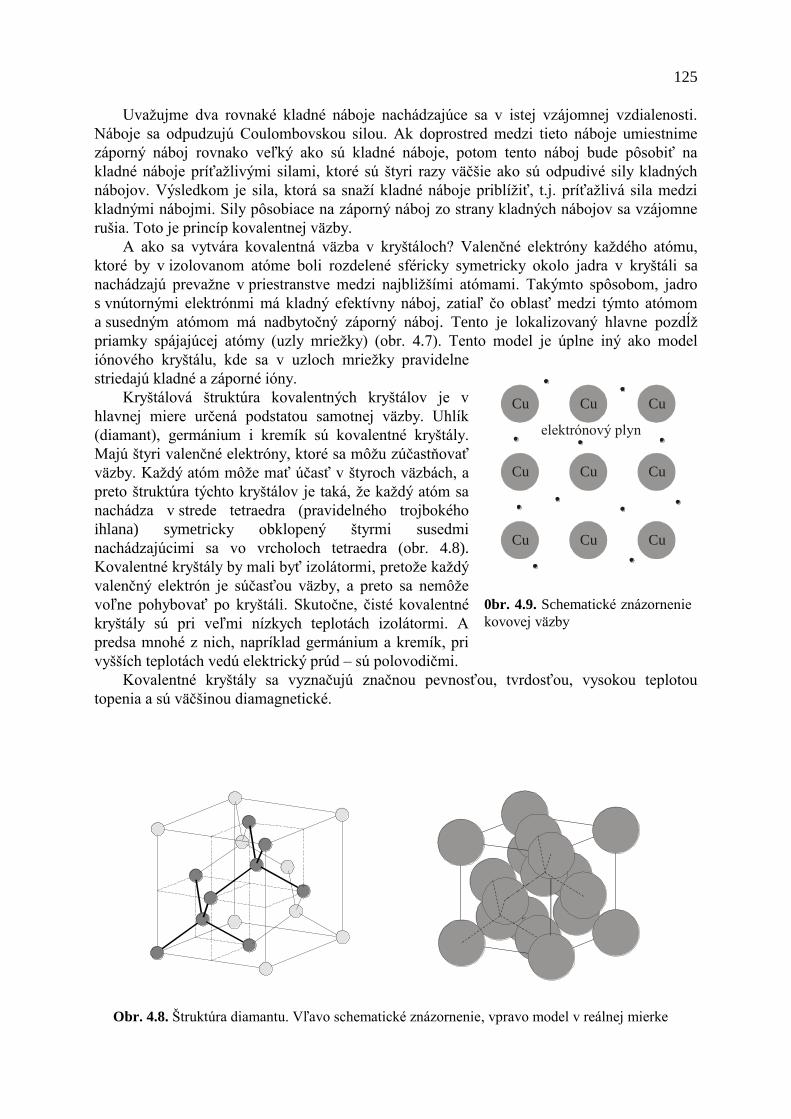
125
Uvaţujme dva rovnaké kladné náboje nachádzajúce sa v istej vzájomnej vzdialenosti.
Náboje sa odpudzujú Coulombovskou silou. Ak doprostred medzi tieto náboje umiestnime
záporný náboj rovnako veľký ako sú kladné náboje, potom tento náboj bude pôsobiť na
kladné náboje príťaţlivými silami, ktoré sú štyri razy väčšie ako sú odpudivé sily kladných
nábojov. Výsledkom je sila, ktorá sa snaţí kladné náboje priblíţiť, t.j. príťaţlivá sila medzi
kladnými nábojmi. Sily pôsobiace na záporný náboj zo strany kladných nábojov sa vzájomne
rušia. Toto je princíp kovalentnej väzby.
A ako sa vytvára kovalentná väzba v kryštáloch? Valenčné elektróny kaţdého atómu,
ktoré by v izolovanom atóme boli rozdelené sféricky symetricky okolo jadra v kryštáli sa
nachádzajú prevaţne v priestranstve medzi najbliţšími atómami. Takýmto spôsobom, jadro
s vnútornými elektrónmi má kladný efektívny náboj, zatiaľ čo oblasť medzi týmto atómom
a susedným atómom má nadbytočný záporný náboj. Tento je lokalizovaný hlavne pozdĺţ
priamky spájajúcej atómy (uzly mrieţky) (obr. 4.7). Tento model je úplne iný ako model
iónového kryštálu, kde sa v uzloch mrieţky pravidelne
striedajú kladné a záporné ióny.
Kryštálová štruktúra kovalentných kryštálov je v
hlavnej miere určená podstatou samotnej väzby. Uhlík
(diamant), germánium i kremík sú kovalentné kryštály.
Majú štyri valenčné elektróny, ktoré sa môţu zúčastňovať
väzby. Kaţdý atóm môţe mať účasť v štyroch väzbách, a
preto štruktúra týchto kryštálov je taká, ţe kaţdý atóm sa
nachádza v strede tetraedra (pravidelného trojbokého
ihlana) symetricky obklopený štyrmi susedmi
nachádzajúcimi sa vo vrcholoch tetraedra (obr. 4.8).
Kovalentné kryštály by mali byť izolátormi, pretoţe kaţdý
valenčný elektrón je súčasťou väzby, a preto sa nemôţe
voľne pohybovať po kryštáli. Skutočne, čisté kovalentné
kryštály sú pri veľmi nízkych teplotách izolátormi. A
predsa mnohé z nich, napríklad germánium a kremík, pri
vyšších teplotách vedú elektrický prúd – sú polovodičmi.
Kovalentné kryštály sa vyznačujú značnou pevnosťou, tvrdosťou, vysokou teplotou
topenia a sú väčšinou diamagnetické.
Obr. 4.8. Štruktúra diamantu. Vľavo schematické znázornenie, vpravo model v reálnej mierke
0br. 4.9. Schematické znázornenie
kovovej väzby
Cu Cu Cu
Cu Cu Cu
Cu Cu Cu
elektrónový plyn
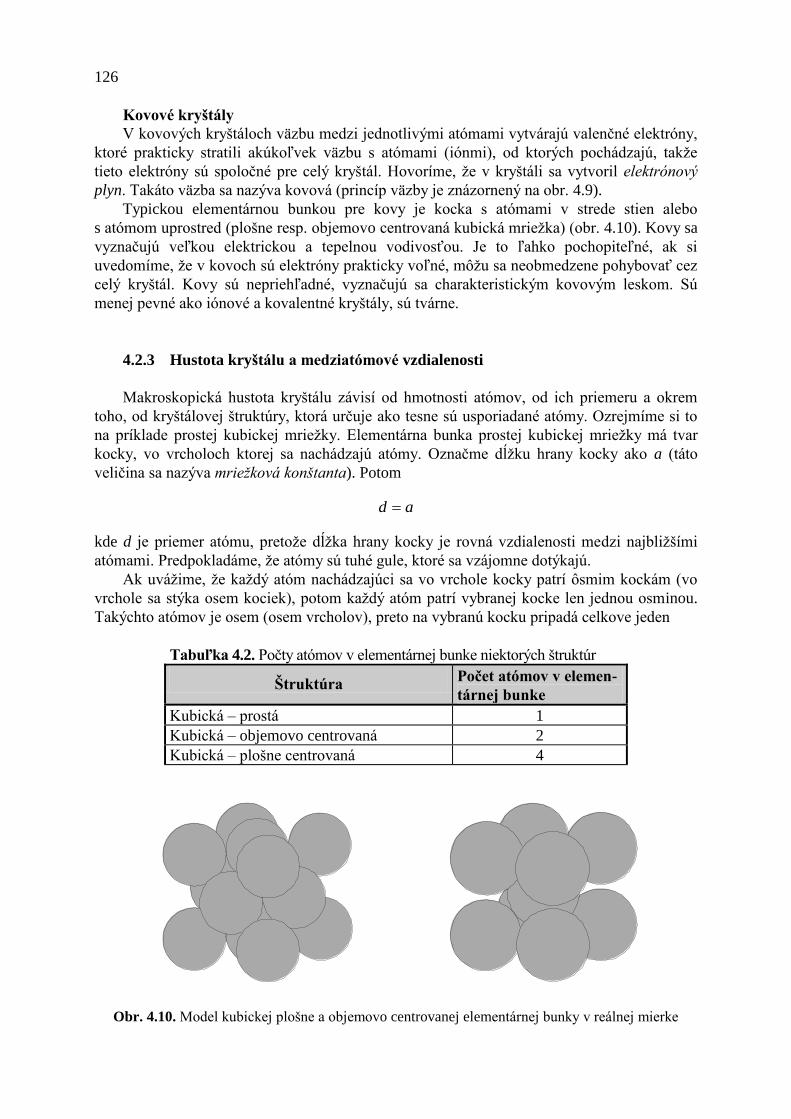
126
Kovové kryštály
V kovových kryštáloch väzbu medzi jednotlivými atómami vytvárajú valenčné elektróny,
ktoré prakticky stratili akúkoľvek väzbu s atómami (iónmi), od ktorých pochádzajú, takţe
tieto elektróny sú spoločné pre celý kryštál. Hovoríme, ţe v kryštáli sa vytvoril elektrónový
plyn. Takáto väzba sa nazýva kovová (princíp väzby je znázornený na obr. 4.9).
Typickou elementárnou bunkou pre kovy je kocka s atómami v strede stien alebo
s atómom uprostred (plošne resp. objemovo centrovaná kubická mrieţka) (obr. 4.10). Kovy sa
vyznačujú veľkou elektrickou a tepelnou vodivosťou. Je to ľahko pochopiteľné, ak si
uvedomíme, ţe v kovoch sú elektróny prakticky voľné, môţu sa neobmedzene pohybovať cez
celý kryštál. Kovy sú nepriehľadné, vyznačujú sa charakteristickým kovovým leskom. Sú
menej pevné ako iónové a kovalentné kryštály, sú tvárne.
4.2.3 Hustota kryštálu a medziatómové vzdialenosti
Makroskopická hustota kryštálu závisí od hmotnosti atómov, od ich priemeru a okrem
toho, od kryštálovej štruktúry, ktorá určuje ako tesne sú usporiadané atómy. Ozrejmíme si to
na príklade prostej kubickej mrieţky. Elementárna bunka prostej kubickej mrieţky má tvar
kocky, vo vrcholoch ktorej sa nachádzajú atómy. Označme dĺţku hrany kocky ako a (táto
veličina sa nazýva mriežková konštanta). Potom
ad
kde d je priemer atómu, pretoţe dĺţka hrany kocky je rovná vzdialenosti medzi najbliţšími
atómami. Predpokladáme, ţe atómy sú tuhé gule, ktoré sa vzájomne dotýkajú.
Ak uváţime, ţe kaţdý atóm nachádzajúci sa vo vrchole kocky patrí ôsmim kockám (vo
vrchole sa stýka osem kociek), potom kaţdý atóm patrí vybranej kocke len jednou osminou.
Takýchto atómov je osem (osem vrcholov), preto na vybranú kocku pripadá celkove jeden
Tabuľka 4.2. Počty atómov v elementárnej bunke niektorých štruktúr
Štruktúra Počet atómov v elemen-
tárnej bunke
Kubická – prostá 1
Kubická – objemovo centrovaná 2
Kubická – plošne centrovaná 4
Obr. 4.10. Model kubickej plošne a objemovo centrovanej elementárnej bunky v reálnej mierke

127
Diamantová (obr. 4.8) 8
atóm. Počet atómov pripadajúcich na elementárnu bunku niektorých kryštálových štruktúr je
uvedený v tabuľke 4.2. Teda na atóm v prostej kubickej mrieţke pripadá objem a3. Hmotnosť
atómu vypočítame zo vzťahu Am NMm , kde Mm je molárna hmotnosť príslušnej látky a
NA – Avogadrova konštanta. Potom hustota v prípade prostej kubickej mrieţky je
3A
m
aN
M (4.2)
V ďalšom si na niekoľkých príkladoch ukáţeme výpočet niektorých zaujímavých veličín
súvisiacich so štruktúrou látky.
Príklad 4.1. Zlato má hustotu 19,32 g/cm3, relatívnu atómovú hmotnosť 197 a plošne
centrovanú kubickú mrieţku. Vypočítajte:
a) počet atómov zlata v 1 cm3,
b) mrieţkovú konštantu,
c) polomer atómu zlata.
Riešenie:
a) Označme N počet atómov v 1 cm3 a m – hmotnosť jedného atómu. Potom hustotu
môţeme vyjadriť vzťahom
A
m . N
MNmN
kde mM je molárna hmotnosť a NA Avogadrova konštanta. Potom
cm 10 . 91,5mol . g 197
mol 10 . 6,022 cmg 32,19 3-22
1-
-1233-
m
A ..
M
NN
V 1 cm3 zlata sa nachádza 221091,5 . atómov.
b) Na elementárnu bunku plošne centrovanej kubickej mrieţky pripadajú 4 atómy (pozri
obr. 4.10): Kaţdý atóm vo vrchole patrí ôsmim elementárnym bunkám – vrcholov je osem,
jednej bunke pripadá 1 atóm. O atóm v strede steny sa delia dve bunky – stien je šesť, na
jednu bunku pripadajú tri atómy leţiace v strede stien. Teda, pri plošne centrovanej kubickej
mrieţke pripadajú na elementárnu bunku štyri atómy. Objem eV elementárnej bunky je:
3e aV , kde a je mrieţková konštanta. Hustotu v prípade plošne centrovanej kubickej
mrieţky vypočítame zo vzťahu
3A
4
aN
M m
Z tohto vzťahu mrieţková konštanta

128
cm 10 . 08,4mol 10 . 6,022 . cm . g 19,32
mol . g 197 . 4
4 8-3
1-233-
1-
3
A
m N
Ma
Mrieţková konštanta zlata je 4,08 . 10-8
cm.
c) Pri zisťovaní polomeru atómu budeme vychádzať z predstavy, ţe atómy sú tuhé gule.
V prípade plošne centrovanej kubickej mrieţky, ak budeme uvaţovať jednu stenu kocky, vo
vrcholoch steny sú umiestnené 4 atómy a jeden je umiestnený v strede steny. Atómy
nachádzajúce sa vo vrcholoch dotýkajú sa atómu v strede steny (atómy vo vrcholoch sa
vzájomne nedotýkajú). Z tohto vyplýva, ţe dĺţka u stenovej uhlopriečky je rovná dvom
priemerom d atómu: u a d r 2 2 4 , z čoho polomer atómu
cm 10 . 44,14
cm 10 . .4,08 2
4
2 8--8
a
r
Polomer atómu zlata je 1,44 . 10-8
cm.
Príklad 4.2. Ukáţte, ţe časť objemu zaplnená atómami (povaţujte ich za tuhé gule)
rozloţenými v uzloch nasledujúcich mrieţok je:
a) 6
π v prostej kubickej mrieţke,
b) 8
π3 v objemovo centrovanej kubickej mrieţke,
c) 6
π2 v plošne centrovanej kubickej mrieţke.
Riešenie:
a) Na elementárnu bunku prostej kubickej mrieţky pripadá jeden atóm. Jeho objem je
3
31
2 π
3
4 π
3
4
arV
lebo r a 2 , kde a je mrieţková konštanta – dĺţka hrany elementárnej bunky. Objem
elementárnej bunky je 3e aV . Teda časť objemu elementárnej bunky zaplnená atómami
6
π2 π
3
4
3
3
e
1
a
a
V
V
b) Na elementárnu bunku objemovo centrovanej kubickej mrieţky pripadajú dva atómy.
Ich objem je 3
312
4
3 π
3
8 π
3
4 . 2 2
arVV

129
lebo 4 3=4t aur , kde tu je telesná uhlopriečka elementárnej bunky (kocky). Teda
časť objemu zaplnená atómami
8
π34
3 π
3
8
3e
2
a
a
V
V
c) Na elementárnu bunku plošne centrovanej kubickej mrieţky pripadajú 4 atómy. Ich
objem je 3
314
4
2 π
3
16 π
3
4 . 4 4
arVV
lebo r u a 4 2 4 , kde u je stenová uhlopriečka. Časť objemu elementárnej bunky
zaplnená atómami
6
24
2 π
3
16
3
3
e
4 a
a
a
V
V
Príklad 4.3. Určte mrieţkovú konštantu kryštálu NaCl. Hustota NaCl je 2,16 g/cm3.
Riešenie:
Štruktúra kryštálu NaCl (obr. 4.11), ak by sme zanedbali
rozdiel medzi druhmi iónov, by vyzerala ako prostá kubická
štruktúra. Keď uvaţujeme len jeden druh iónov je to plošne
centrovaná kubická štruktúra (viď ióny chlóru). Na túto štruktúru
moţno nazerať aj tak, ţe mrieţka bude plošne centrovaná
kubická, v ktorej uzlových bodoch sú umiestnené molekuly
NaCl.
Z obr. 4.11 je zrejmé, ţe súčet polomerov iónov Na+ a Cl
- je
rovný polovici dĺţky hrany kocky (polovici mrieţkovej
konštanty)
r r a1 2 2
kde r1 a r2 sú polomery iónov. Elementárna bunka obsahuje štyri ióny Na+ a štyri ióny Cl
-.
Preto
3A
m 4
aN
M
kde g/mol 44,58m M je molárna hmotnosť NaCl. Z tejto rovnice mrieţková konštanta
cm 10 . 64,5mol 10 . 6,022 . cm . g 2,16
mol . g 58,44 . 4
4 83
1-233-
1-
3
A
m N
Ma
Obr. 4.11. Štruktúra kryš-
tálu NaCl
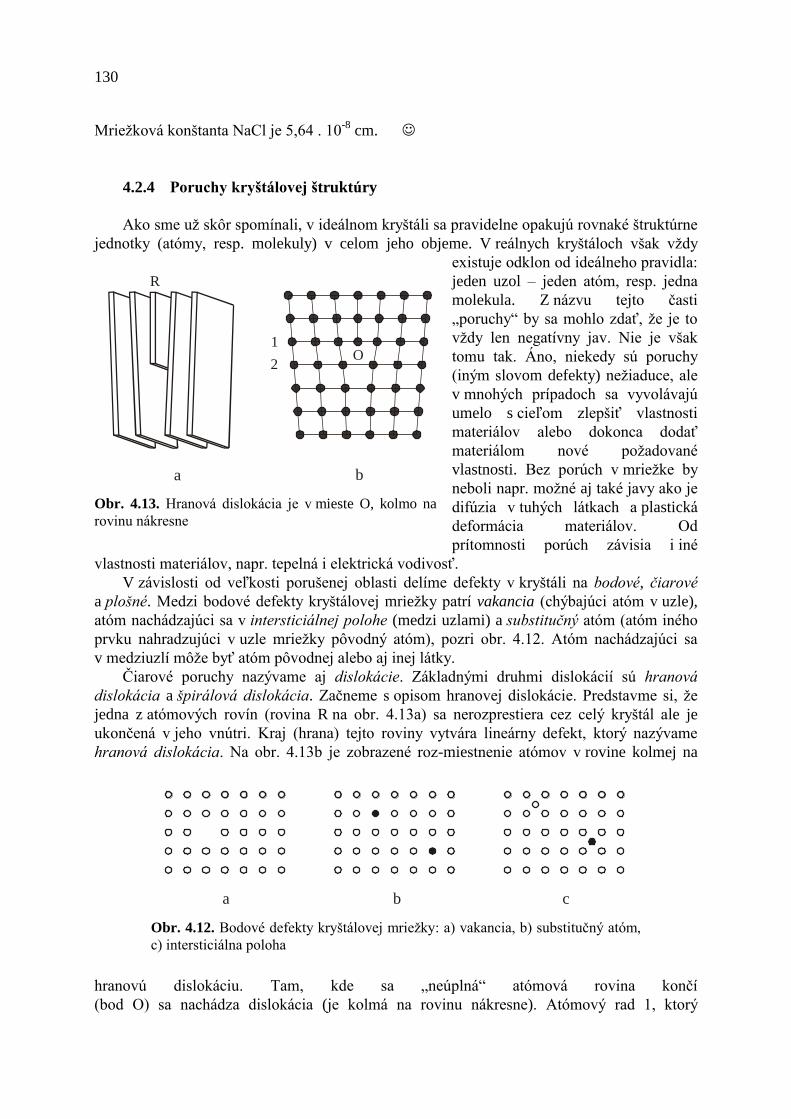
130
Mrieţková konštanta NaCl je 5,64 . 10-8
cm.
4.2.4 Poruchy kryštálovej štruktúry
Ako sme uţ skôr spomínali, v ideálnom kryštáli sa pravidelne opakujú rovnaké štruktúrne
jednotky (atómy, resp. molekuly) v celom jeho objeme. V reálnych kryštáloch však vţdy
existuje odklon od ideálneho pravidla:
jeden uzol – jeden atóm, resp. jedna
molekula. Z názvu tejto časti
„poruchy“ by sa mohlo zdať, ţe je to
vţdy len negatívny jav. Nie je však
tomu tak. Áno, niekedy sú poruchy
(iným slovom defekty) neţiaduce, ale
v mnohých prípadoch sa vyvolávajú
umelo s cieľom zlepšiť vlastnosti
materiálov alebo dokonca dodať
materiálom nové poţadované
vlastnosti. Bez porúch v mrieţke by
neboli napr. moţné aj také javy ako je
difúzia v tuhých látkach a plastická
deformácia materiálov. Od
prítomnosti porúch závisia i iné
vlastnosti materiálov, napr. tepelná i elektrická vodivosť.
V závislosti od veľkosti porušenej oblasti delíme defekty v kryštáli na bodové, čiarové
a plošné. Medzi bodové defekty kryštálovej mrieţky patrí vakancia (chýbajúci atóm v uzle),
atóm nachádzajúci sa v intersticiálnej polohe (medzi uzlami) a substitučný atóm (atóm iného
prvku nahradzujúci v uzle mrieţky pôvodný atóm), pozri obr. 4.12. Atóm nachádzajúci sa
v medziuzlí môţe byť atóm pôvodnej alebo aj inej látky.
Čiarové poruchy nazývame aj dislokácie. Základnými druhmi dislokácií sú hranová
dislokácia a špirálová dislokácia. Začneme s opisom hranovej dislokácie. Predstavme si, ţe
jedna z atómových rovín (rovina R na obr. 4.13a) sa nerozprestiera cez celý kryštál ale je
ukončená v jeho vnútri. Kraj (hrana) tejto roviny vytvára lineárny defekt, ktorý nazývame
hranová dislokácia. Na obr. 4.13b je zobrazené roz-miestnenie atómov v rovine kolmej na
hranovú dislokáciu. Tam, kde sa „neúplná“ atómová rovina končí
(bod O) sa nachádza dislokácia (je kolmá na rovinu nákresne). Atómový rad 1, ktorý
Obr. 4.12. Bodové defekty kryštálovej mrieţky: a) vakancia, b) substitučný atóm,
c) intersticiálna poloha
Obr. 4.13. Hranová dislokácia je v mieste O, kolmo na
rovinu nákresne
a b c
a
R
O1
2
b
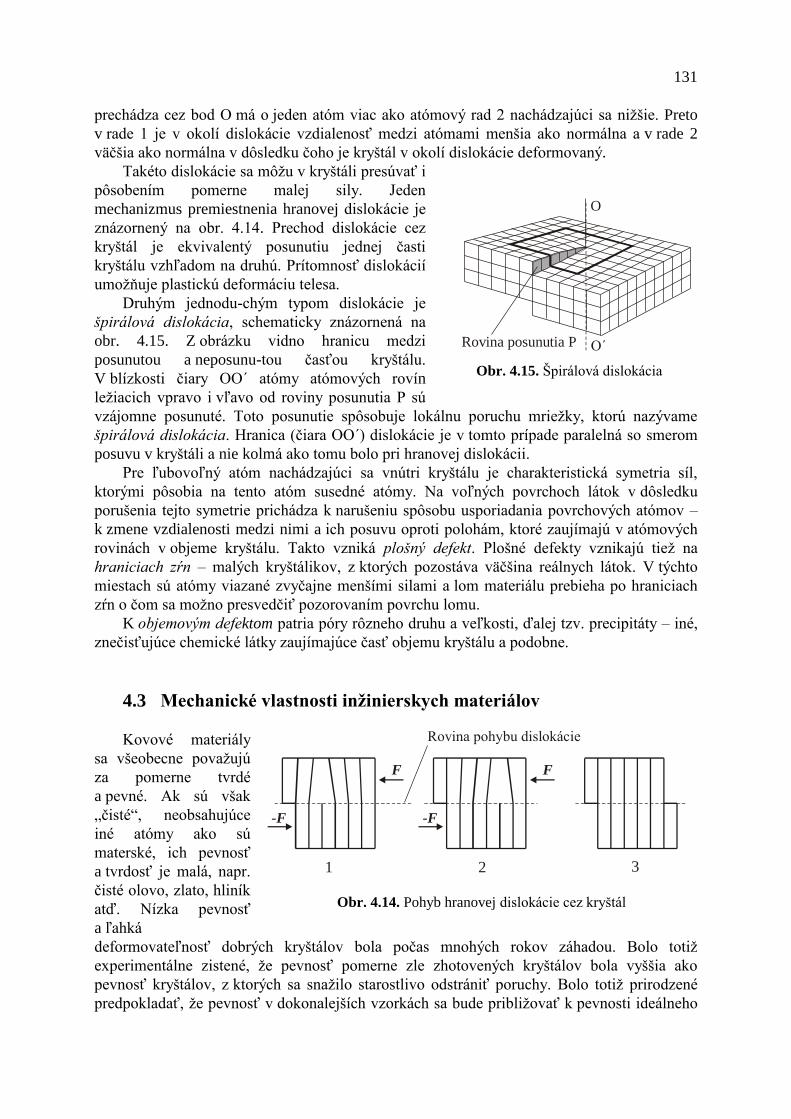
131
prechádza cez bod O má o jeden atóm viac ako atómový rad 2 nachádzajúci sa niţšie. Preto
v rade 1 je v okolí dislokácie vzdialenosť medzi atómami menšia ako normálna a v rade 2
väčšia ako normálna v dôsledku čoho je kryštál v okolí dislokácie deformovaný.
Takéto dislokácie sa môţu v kryštáli presúvať i
pôsobením pomerne malej sily. Jeden
mechanizmus premiestnenia hranovej dislokácie je
znázornený na obr. 4.14. Prechod dislokácie cez
kryštál je ekvivalentý posunutiu jednej časti
kryštálu vzhľadom na druhú. Prítomnosť dislokácií
umoţňuje plastickú deformáciu telesa.
Druhým jednodu-chým typom dislokácie je
špirálová dislokácia, schematicky znázornená na
obr. 4.15. Z obrázku vidno hranicu medzi
posunutou a neposunu-tou časťou kryštálu.
V blízkosti čiary OO´ atómy atómových rovín
leţiacich vpravo i vľavo od roviny posunutia P sú
vzájomne posunuté. Toto posunutie spôsobuje lokálnu poruchu mrieţky, ktorú nazývame
špirálová dislokácia. Hranica (čiara OO´) dislokácie je v tomto prípade paralelná so smerom
posuvu v kryštáli a nie kolmá ako tomu bolo pri hranovej dislokácii.
Pre ľubovoľný atóm nachádzajúci sa vnútri kryštálu je charakteristická symetria síl,
ktorými pôsobia na tento atóm susedné atómy. Na voľných povrchoch látok v dôsledku
porušenia tejto symetrie prichádza k narušeniu spôsobu usporiadania povrchových atómov –
k zmene vzdialenosti medzi nimi a ich posuvu oproti polohám, ktoré zaujímajú v atómových
rovinách v objeme kryštálu. Takto vzniká plošný defekt. Plošné defekty vznikajú tieţ na
hraniciach zŕn – malých kryštálikov, z ktorých pozostáva väčšina reálnych látok. V týchto
miestach sú atómy viazané zvyčajne menšími silami a lom materiálu prebieha po hraniciach
zŕn o čom sa moţno presvedčiť pozorovaním povrchu lomu.
K objemovým defektom patria póry rôzneho druhu a veľkosti, ďalej tzv. precipitáty – iné,
znečisťujúce chemické látky zaujímajúce časť objemu kryštálu a podobne.
4.3 Mechanické vlastnosti inţinierskych materiálov
Kovové materiály
sa všeobecne povaţujú
za pomerne tvrdé
a pevné. Ak sú však
„čisté“, neobsahujúce
iné atómy ako sú
materské, ich pevnosť
a tvrdosť je malá, napr.
čisté olovo, zlato, hliník
atď. Nízka pevnosť
a ľahká
deformovateľnosť dobrých kryštálov bola počas mnohých rokov záhadou. Bolo totiţ
experimentálne zistené, ţe pevnosť pomerne zle zhotovených kryštálov bola vyššia ako
pevnosť kryštálov, z ktorých sa snaţilo starostlivo odstrániť poruchy. Bolo totiţ prirodzené
predpokladať, ţe pevnosť v dokonalejších vzorkách sa bude pribliţovať k pevnosti ideálneho
Obr. 4.14. Pohyb hranovej dislokácie cez kryštál
Obr. 4.15. Špirálová dislokácia
F F
-F -F
Rovina pohybu dislokácie
1 2 3
O
O´Rovina posunutia P
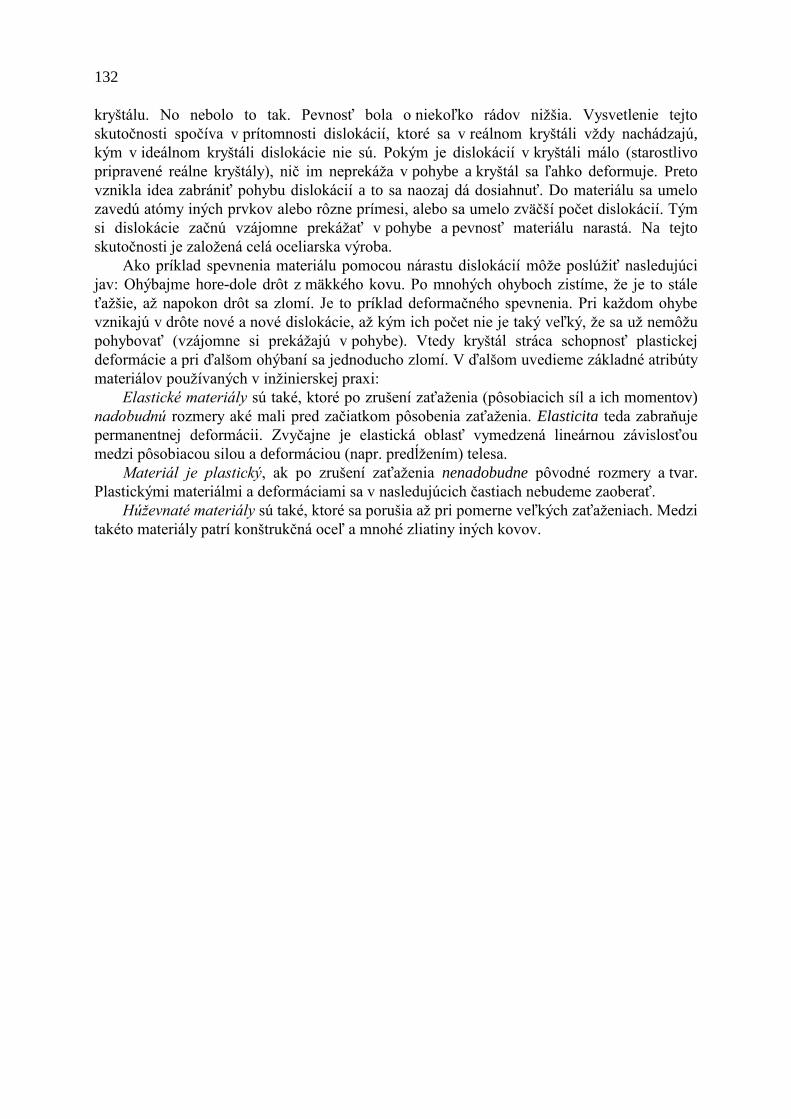
132
kryštálu. No nebolo to tak. Pevnosť bola o niekoľko rádov niţšia. Vysvetlenie tejto
skutočnosti spočíva v prítomnosti dislokácií, ktoré sa v reálnom kryštáli vţdy nachádzajú,
kým v ideálnom kryštáli dislokácie nie sú. Pokým je dislokácií v kryštáli málo (starostlivo
pripravené reálne kryštály), nič im neprekáţa v pohybe a kryštál sa ľahko deformuje. Preto
vznikla idea zabrániť pohybu dislokácií a to sa naozaj dá dosiahnuť. Do materiálu sa umelo
zavedú atómy iných prvkov alebo rôzne prímesi, alebo sa umelo zväčší počet dislokácií. Tým
si dislokácie začnú vzájomne prekáţať v pohybe a pevnosť materiálu narastá. Na tejto
skutočnosti je zaloţená celá oceliarska výroba.
Ako príklad spevnenia materiálu pomocou nárastu dislokácií môţe poslúţiť nasledujúci
jav: Ohýbajme hore-dole drôt z mäkkého kovu. Po mnohých ohyboch zistíme, ţe je to stále
ťaţšie, aţ napokon drôt sa zlomí. Je to príklad deformačného spevnenia. Pri kaţdom ohybe
vznikajú v drôte nové a nové dislokácie, aţ kým ich počet nie je taký veľký, ţe sa uţ nemôţu
pohybovať (vzájomne si prekáţajú v pohybe). Vtedy kryštál stráca schopnosť plastickej
deformácie a pri ďalšom ohýbaní sa jednoducho zlomí. V ďalšom uvedieme základné atribúty
materiálov pouţívaných v inţinierskej praxi:
Elastické materiály sú také, ktoré po zrušení zaťaţenia (pôsobiacich síl a ich momentov)
nadobudnú rozmery aké mali pred začiatkom pôsobenia zaťaţenia. Elasticita teda zabraňuje
permanentnej deformácii. Zvyčajne je elastická oblasť vymedzená lineárnou závislosťou
medzi pôsobiacou silou a deformáciou (napr. predĺţením) telesa.
Materiál je plastický, ak po zrušení zaťaţenia nenadobudne pôvodné rozmery a tvar.
Plastickými materiálmi a deformáciami sa v nasledujúcich častiach nebudeme zaoberať.
Húževnaté materiály sú také, ktoré sa porušia aţ pri pomerne veľkých zaťaţeniach. Medzi
takéto materiály patrí konštrukčná oceľ a mnohé zliatiny iných kovov.
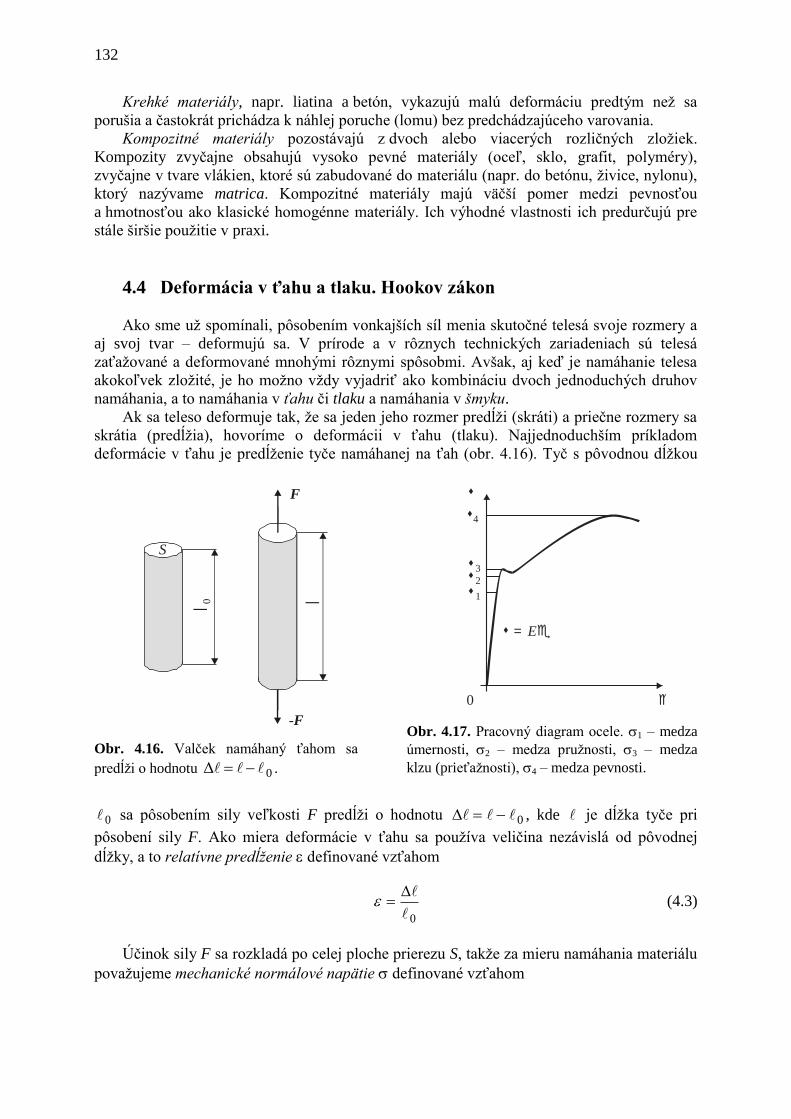
132
Krehké materiály, napr. liatina a betón, vykazujú malú deformáciu predtým než sa
porušia a častokrát prichádza k náhlej poruche (lomu) bez predchádzajúceho varovania.
Kompozitné materiály pozostávajú z dvoch alebo viacerých rozličných zložiek.
Kompozity zvyčajne obsahujú vysoko pevné materiály (oceľ, sklo, grafit, polyméry),
zvyčajne v tvare vlákien, ktoré sú zabudované do materiálu (napr. do betónu, živice, nylonu),
ktorý nazývame matrica. Kompozitné materiály majú väčší pomer medzi pevnosťou
a hmotnosťou ako klasické homogénne materiály. Ich výhodné vlastnosti ich predurčujú pre
stále širšie použitie v praxi.
4.4 Deformácia v ťahu a tlaku. Hookov zákon
Ako sme už spomínali, pôsobením vonkajších síl menia skutočné telesá svoje rozmery a
aj svoj tvar – deformujú sa. V prírode a v rôznych technických zariadeniach sú telesá
zaťažované a deformované mnohými rôznymi spôsobmi. Avšak, aj keď je namáhanie telesa
akokoľvek zložité, je ho možno vždy vyjadriť ako kombináciu dvoch jednoduchých druhov
namáhania, a to namáhania v ťahu či tlaku a namáhania v šmyku.
Ak sa teleso deformuje tak, že sa jeden jeho rozmer predĺži (skráti) a priečne rozmery sa
skrátia (predĺžia), hovoríme o deformácii v ťahu (tlaku). Najjednoduchším príkladom
deformácie v ťahu je predĺženie tyče namáhanej na ťah (obr. 4.16). Tyč s pôvodnou dĺžkou
0 sa pôsobením sily veľkosti F predĺži o hodnotu 0 , kde je dĺžka tyče pri
pôsobení sily F. Ako miera deformácie v ťahu sa používa veličina nezávislá od pôvodnej
dĺžky, a to relatívne predĺženie definované vzťahom
0
(4.3)
Účinok sily F sa rozkladá po celej ploche prierezu S, takže za mieru namáhania materiálu
považujeme mechanické normálové napätie definované vzťahom
Obr. 4.16. Valček namáhaný ťahom sa
predĺži o hodnotu 0Δ .
Obr. 4.17. Pracovný diagram ocele. 1 – medza
úmernosti, 2 – medza pružnosti, 3 – medza
klzu (prieťažnosti), 4 – medza pevnosti.
s
s
s
s
s
0 e
= Ees
1
2
3
4
S
l 0
F
-F
l
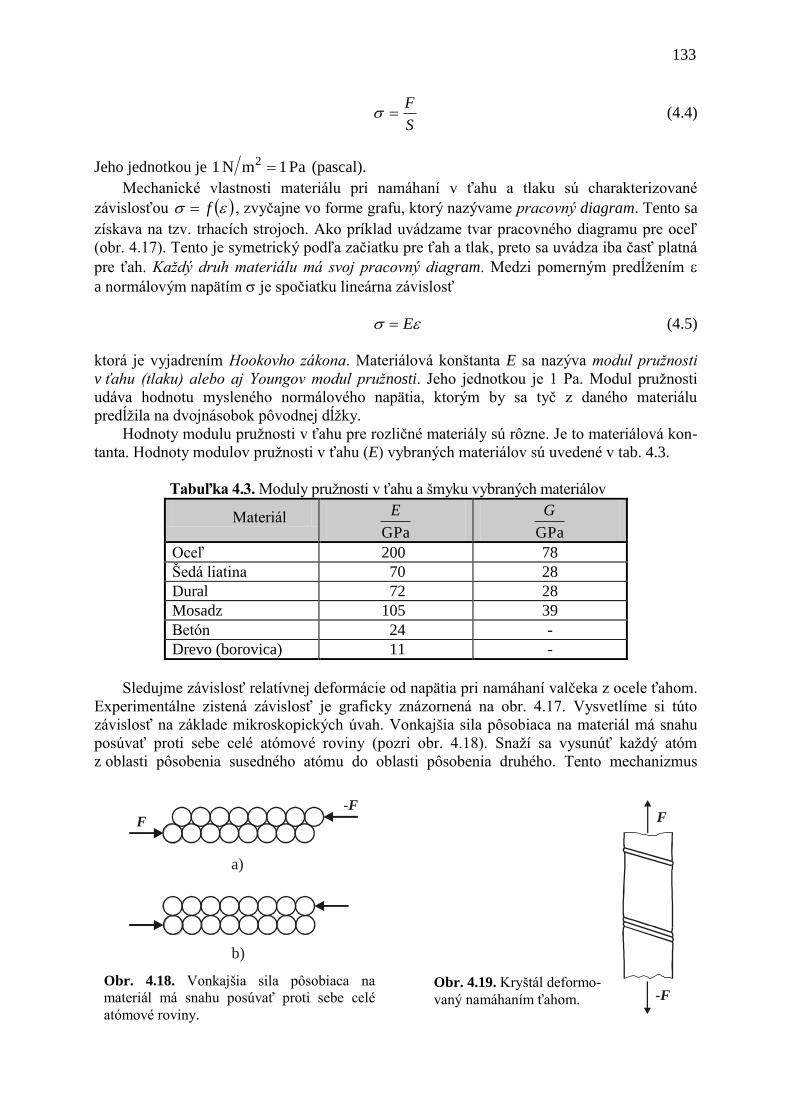
133
S
F (4.4)
Jeho jednotkou je Pa1mN 1 2 (pascal).
Mechanické vlastnosti materiálu pri namáhaní v ťahu a tlaku sú charakterizované
závislosťou f , zvyčajne vo forme grafu, ktorý nazývame pracovný diagram. Tento sa
získava na tzv. trhacích strojoch. Ako príklad uvádzame tvar pracovného diagramu pre oceľ
(obr. 4.17). Tento je symetrický podľa začiatku pre ťah a tlak, preto sa uvádza iba časť platná
pre ťah. Každý druh materiálu má svoj pracovný diagram. Medzi pomerným predĺžením
a normálovým napätím je spočiatku lineárna závislosť
E (4.5)
ktorá je vyjadrením Hookovho zákona. Materiálová konštanta E sa nazýva modul pružnosti
v ťahu (tlaku) alebo aj Youngov modul pružnosti. Jeho jednotkou je 1 Pa. Modul pružnosti
udáva hodnotu mysleného normálového napätia, ktorým by sa tyč z daného materiálu
predĺžila na dvojnásobok pôvodnej dĺžky.
Hodnoty modulu pružnosti v ťahu pre rozličné materiály sú rôzne. Je to materiálová kon-
tanta. Hodnoty modulov pružnosti v ťahu (E) vybraných materiálov sú uvedené v tab. 4.3.
Tabuľka 4.3. Moduly pružnosti v ťahu a šmyku vybraných materiálov
Materiál GPa
E
GPa
G
Oceľ 200 78
Šedá liatina 70 28
Dural 72 28
Mosadz 105 39
Betón 24 -
Drevo (borovica) 11 -
Sledujme závislosť relatívnej deformácie od napätia pri namáhaní valčeka z ocele ťahom.
Experimentálne zistená závislosť je graficky znázornená na obr. 4.17. Vysvetlíme si túto
závislosť na základe mikroskopických úvah. Vonkajšia sila pôsobiaca na materiál má snahu
posúvať proti sebe celé atómové roviny (pozri obr. 4.18). Snaží sa vysunúť každý atóm
z oblasti pôsobenia susedného atómu do oblasti pôsobenia druhého. Tento mechanizmus
Obr. 4.18. Vonkajšia sila pôsobiaca na
materiál má snahu posúvať proti sebe celé
atómové roviny.
Obr. 4.19. Kryštál deformo-
vaný namáhaním ťahom.
a)
b)
F
-FF
-F

134
deformácie je potvrdený skutočne pozorovaným vzhľadom povrchu deformovaného
kovového kryštálu. Na obr. 4.19, ktorý je prekreslenou fotografiou z knihy [Wert,
Thomson].je zreteľne vidno posuv atómových rovín.
Oblasť napätí od 0 po 1 (obr. 4.17) je charakterizovaná situáciou, v ktorej sa atómy
správajú ako harmonické oscilátory – ich výchylka z rovnovážnej polohy je priamo úmerná
pôsobiacej sile. Pri väčších napätiach (nad 2 ) lineárnosť medzi napätím a deformáciou
prestáva platiť, ale deformácia je vratná, t. zn., že materiál po zrušení zaťaženia nadobudne
pôvodné rozmery. Situácia pri napätí 3 je znázornená na obr. 4.18b. Pri nepatrnom
prekročení tohto napätia prebieha deformácia sama – kĺzaním jednotlivých rovín po sebe.
Oblasť medzi napätiami 3 a 4 možno nazvať oblasťou spevnenia. Reálne kryštály vždy,
ako sme už spomínali, obsahujú dislokácie. Namáhaním sa generujú ďalšie. Keď však ich
koncentrácia dosiahne určitú hodnotu, začínajú si v pohybe navzájom prekážať a nastáva
spevnenie materiálu. Pri napätí 4 proces deformácie sa už nedá zastaviť a prichádza
k pretrhnutiu materiálu.
Samozrejme, pracovné diagramy rôznych materiálov sú rôzne. Niektoré materiály
nevykazujú zreteľne medzu klzu, iné materiály nie sú symetrické z hľadiska namáhania
ťahom a tlakom.
Pri namáhaní tyče ťahom sa okrem zmeny dĺžky súčasne menia aj priečne rozmery. Keď
berieme do úvahy namáhanie tyče s kruhovým prierezom s pôvodným priemerom 0d ,
relatívnu zmenu priečneho rozmeru možno vyjadriť takto
0
0
0 d
dd
d
d
(4.6)
kde d je priemer tyče pri danom zaťažení. Pri kladnej pozdĺžnej deformácii, čiže pri namáhaní
ťahom 0dd a teda 0 . Pri namáhaní tlakom 0dd a 0 .
Podiel pomerného priečneho skrátenia a pomerného predĺženia
(4.7)
sa nazýva Poissonovo číslo. Jeho prevrátená hodnota 1m sa nazýva Poissonova
konštanta. Obidve veličiny sú bezrozmerné. Znamienko mínus vo vzťahu (4.7) značí, že
pozdĺžna deformácia má opačný charakter ako priečna deformácia. Keď sa tyč predĺži,
priečny rozmer sa skráti a naopak. Experimentálne je zistené, že je zvyčajne v rozsahu od
0,25 do 0,35. Extrémne prípady sú: 10, pre niektoré betóny a 50, pre gumu.
Dĺžku tyče pri zaťažení ťahovým napätím určíme úpravou vzťahu
0
0
E
teda
E
10 (4.8)
Priečny rozmer d pri zaťažení tyče ťahovým napätím určíme úpravou vzťahu

135
0
0
d
dd
keď do neho dosadíme E
Edd
10 (4.9)
Príklad 4.4. Oceľový kváder s rozmermi cm 5,2a , cm 2,1b a cm 100 je
namáhaný na ťah v smere rozmeru 0 . Meraním sme zistili, že kváder sa predĺžil
o cm 10.11,7 3 a jeho šírka (rozmer a) sa zmenšila o cm 10.33,5 4 , keď zaťažujúca sila mala
hodnotu 45 kN. Vypočítajte modul pružnosti v ťahu a Poissonovo číslo materiálu.
Riešenie: Z Hookovho zákona
Pa 10.11,2m 7,11.10
m 10.1.
m 1,2.10 . m 2,5.10
N 10.5,4 11
5-
1
2-2-
400
ab
F
S
FE
Poissonovo číslo
3,0m 2,5.10 . m 7,11.10
m 1.10 . m 10.33,5
.
. 2-5-
1-60
0
a
aa
a
Príklad 4.5. O koľko sa predĺži homogénny oceľový drôt dĺžky 100 m a prierezu 2mm 1 , ak ho voľne zavesíme za jeden jeho koniec? Modul pružnosti drôtu v ťahu je
Pa 102 11. a jeho hustota -33 kg.m 1087 ., .
Riešenie: Dĺžkový element drôtu xd sa napína tiažou drôtu, ktorý
je pod ním (obr. 4.20). Pre predĺženie elementu platí
xx
E
gx
S
gxS
Ex
S
F
Edd
1d
1d
Celkové predĺženie drôtu dostaneme súčtom predĺžení jednotlivých
elementov (t.j. integráciou), teda
E
gxx
E
gxx
E
g
22dd
2
0
2
00
Príklad 4.6. Oceľová valcová nádrž s polguľovými koncami obsahuje vzduch, ktorého
tlak je 1,4 MPa. Vypočítajte napätie pôsobiace v stene nádrže v axiálnom i radiálnom smere.
Polomer nádrže je 25 cm a hrúbka jej steny 8 mm (obr. 4.21a)
Obr. 4.20. K príkla-
du 4.5.
x
dx l
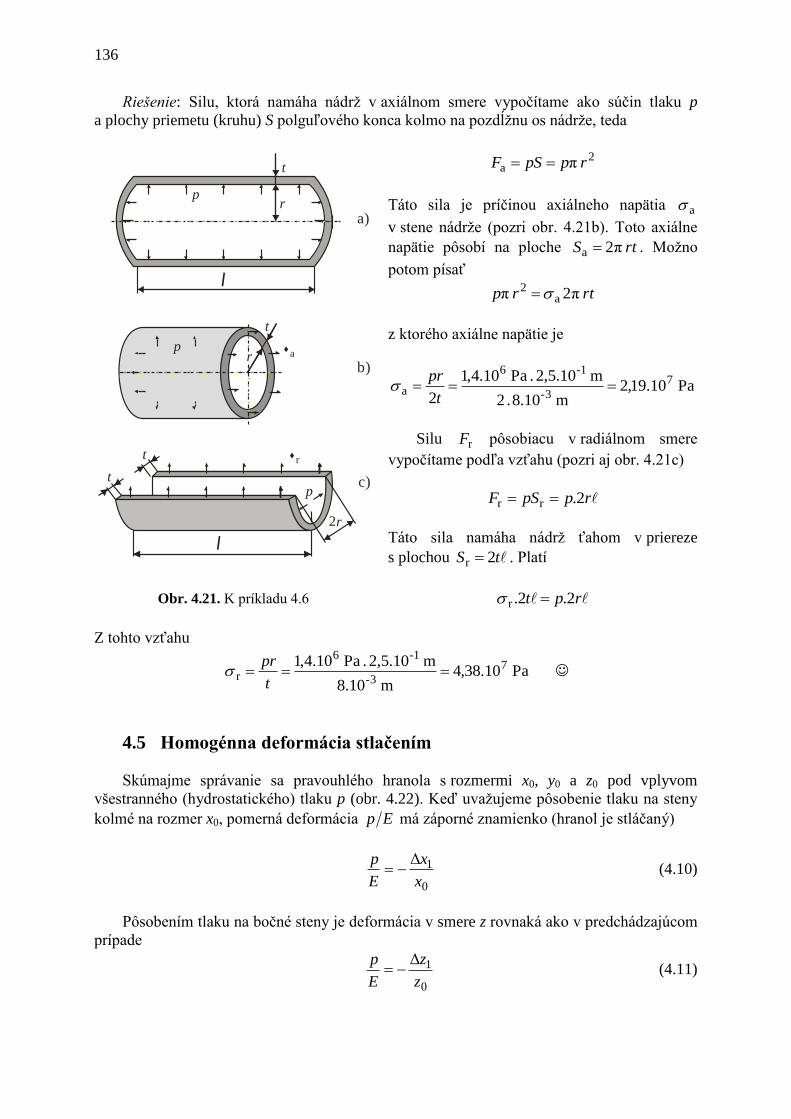
136
Riešenie: Silu, ktorá namáha nádrž v axiálnom smere vypočítame ako súčin tlaku p
a plochy priemetu (kruhu) S polguľového konca kolmo na pozdĺžnu os nádrže, teda
2
a π rppSF
Táto sila je príčinou axiálneho napätia a
v stene nádrže (pozri obr. 4.21b). Toto axiálne
napätie pôsobí na ploche rtS π2a . Možno
potom písať
rtrp π2 π a2
z ktorého axiálne napätie je
Pa 10.19,2m 8.10 . 2
m 2,5.10 . Pa 10.4,1
2
7
3-
-16
a t
pr
Silu rF pôsobiacu v radiálnom smere
vypočítame podľa vzťahu (pozri aj obr. 4.21c)
rppSF 2.rr
Táto sila namáha nádrž ťahom v priereze
s plochou tS 2r . Platí
rpt 2.2.r
Z tohto vzťahu
Pa 10.38,4m 8.10
m 2,5.10 . Pa 10.4,1 7
3-
-16
r t
pr
4.5 Homogénna deformácia stlačením
Skúmajme správanie sa pravouhlého hranola s rozmermi x0, y0 a z0 pod vplyvom
všestranného (hydrostatického) tlaku p (obr. 4.22). Keď uvažujeme pôsobenie tlaku na steny
kolmé na rozmer x0, pomerná deformácia Ep má záporné znamienko (hranol je stláčaný)
0
1Δ
x
x
E
p (4.10)
Pôsobením tlaku na bočné steny je deformácia v smere z rovnaká ako v predchádzajúcom
prípade
0
1Δ
z
z
E
p (4.11)
Obr. 4.21. K príkladu 4.6
p
p
r
2r
t
t
t
t
l
l
rp s
s
a
r
a)
b)
c)

137
Nás však zaujíma deformácia v smere x.
Pôsobením tlaku na steny kolmé na rozmer z,
deformácia (rozšírenie) v smere rozmeru x je
E
p
x
x
0
2 (4.12)
Podobne, ak budeme stláčať hranol zhora (v
smere y) deformácia v smere y je opäť
0
1Δ
y
y
E
p (4.13)
a priečna deformácia v smere x je
E
p
x
x
0
3 (4.14)
Zložením všetkých deformácií v smere x dostaneme
0
321
0 x
xxx
x
x
resp.
21E
p
E
p
E
p
E
px (4.15)
Problém je samozrejme symetrický vo všetkých troch smeroch. Preto platí
21000
E
p
z
z
y
y
x
x (4.16)
resp.
21E
pzyx (4.16´)
Vypočítame teraz relatívnu zmenu objemu kvádra. Objem kvádra V0 pred zaťažením je
0000 zyxV
a objem V pri pôsobení tlaku
zzyyxxV 000 (4.17)
Po vynásobení pravej strany vzťahu (4.17) a zanedbaní vzájomných súčinov zmien (typu
yx a zyx ) dostaneme pre objem V vzťah
zyxyzxxzyVV 0000000
Ďalej, vydelením vzťahu
zyxyzxxzyVVV 0000000
Obr. 4.22. Hranol namáhaný všestranným
tlakom.
x
z
y
0
0
0
p
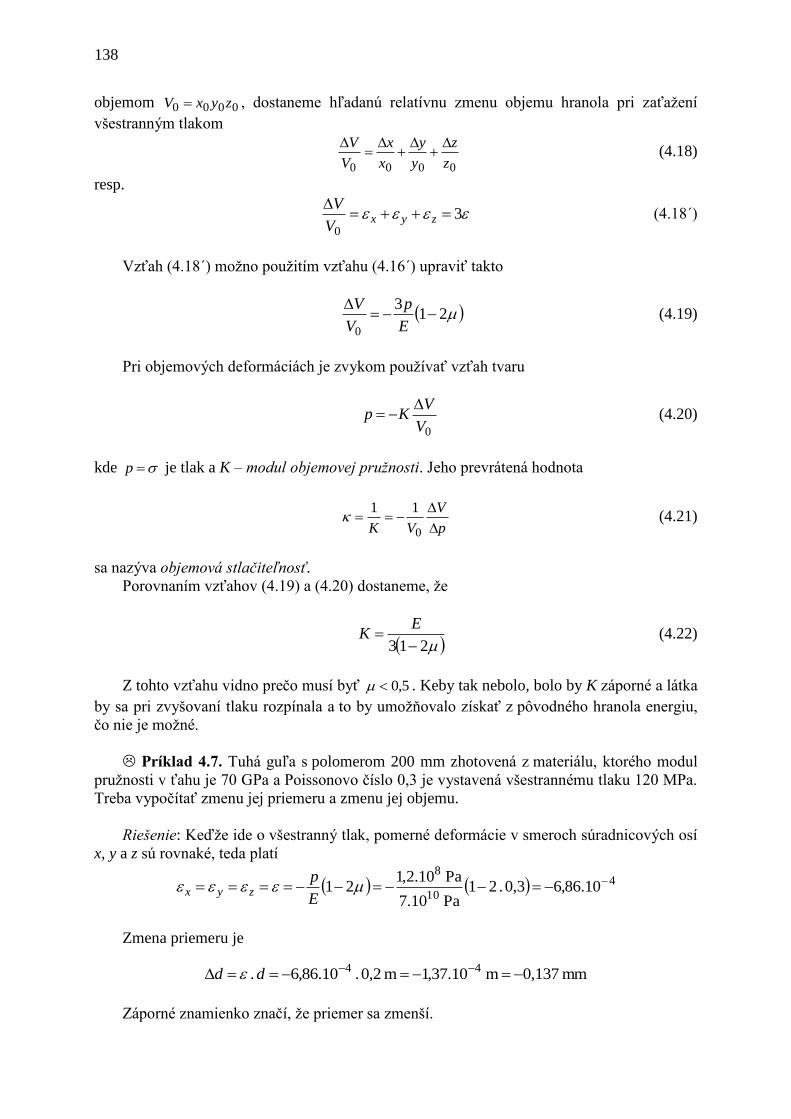
138
objemom 0000 zyxV , dostaneme hľadanú relatívnu zmenu objemu hranola pri zaťažení
všestranným tlakom
0000 z
z
y
y
x
x
V
V
(4.18)
resp.
30
zyxV
V (4.18´)
Vzťah (4.18´) možno použitím vzťahu (4.16´) upraviť takto
213
0
E
p
V
V (4.19)
Pri objemových deformáciách je zvykom používať vzťah tvaru
0V
VKp
(4.20)
kde p je tlak a K – modul objemovej pružnosti. Jeho prevrátená hodnota
p
V
VK
0
11 (4.21)
sa nazýva objemová stlačiteľnosť.
Porovnaním vzťahov (4.19) a (4.20) dostaneme, že
213
EK (4.22)
Z tohto vzťahu vidno prečo musí byť 5,0 . Keby tak nebolo, bolo by K záporné a látka
by sa pri zvyšovaní tlaku rozpínala a to by umožňovalo získať z pôvodného hranola energiu,
čo nie je možné.
Príklad 4.7. Tuhá guľa s polomerom 200 mm zhotovená z materiálu, ktorého modul
pružnosti v ťahu je 70 GPa a Poissonovo číslo 0,3 je vystavená všestrannému tlaku 120 MPa.
Treba vypočítať zmenu jej priemeru a zmenu jej objemu.
Riešenie: Keďže ide o všestranný tlak, pomerné deformácie v smeroch súradnicových osí
x, y a z sú rovnaké, teda platí
4
10
8
10.86,60,3 . 21Pa 7.10
Pa 10.2,121
E
pzyx
Zmena priemeru je
mm 0,137m 10.37,1m 0,2 . 10.86,6 . 44 dd
Záporné znamienko značí, že priemer sa zmenší.
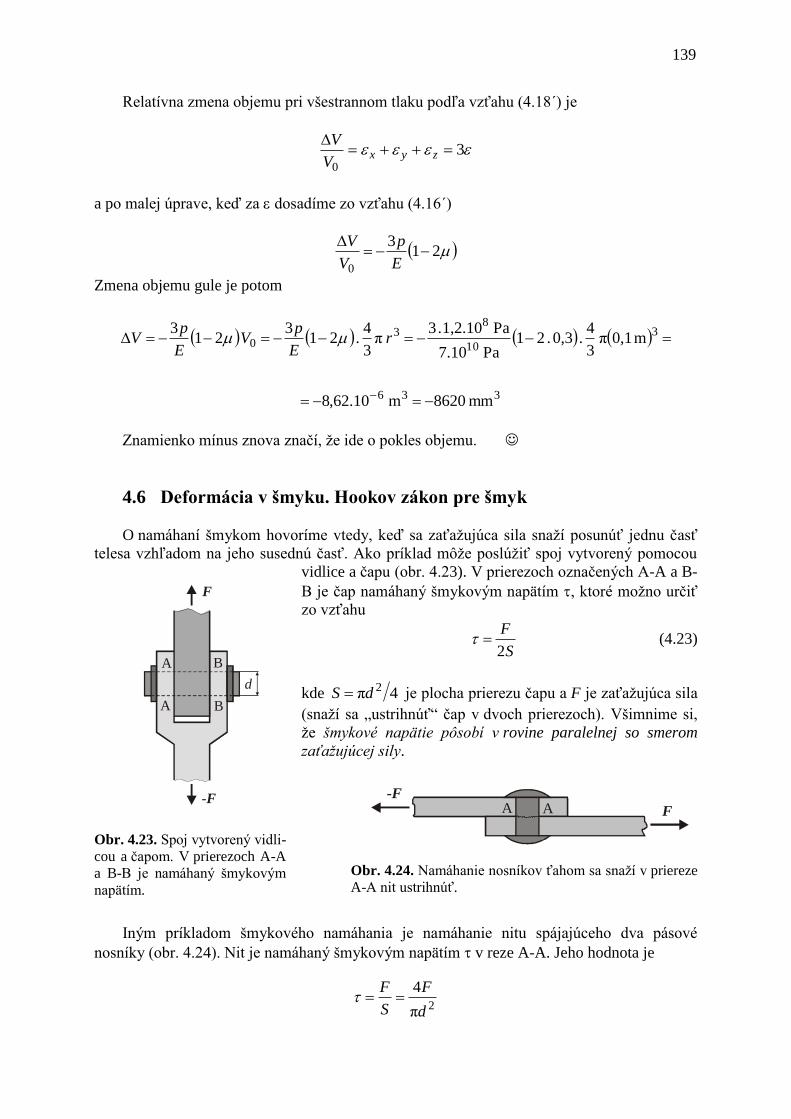
139
Relatívna zmena objemu pri všestrannom tlaku podľa vzťahu (4.18´) je
30
zyxV
V
a po malej úprave, keď za dosadíme zo vzťahu (4.16´)
213
0
E
p
V
V
Zmena objemu gule je potom
336
3
10
83
0
mm 8620m 10.62,8
m 0,1 π3
4 . 0,3 . 21
Pa 7.10
Pa 1,2.10 . 3 π
3
4 . 21
3 21
3
rE
pV
E
pV
Znamienko mínus znova značí, že ide o pokles objemu.
4.6 Deformácia v šmyku. Hookov zákon pre šmyk
O namáhaní šmykom hovoríme vtedy, keď sa zaťažujúca sila snaží posunúť jednu časť
telesa vzhľadom na jeho susednú časť. Ako príklad môže poslúžiť spoj vytvorený pomocou
vidlice a čapu (obr. 4.23). V prierezoch označených A-A a B-
B je čap namáhaný šmykovým napätím , ktoré možno určiť
zo vzťahu
S
F
2 (4.23)
kde 4π 2dS je plocha prierezu čapu a F je zaťažujúca sila
(snaží sa „ustrihnúť“ čap v dvoch prierezoch). Všimnime si,
že šmykové napätie pôsobí v rovine paralelnej so smerom
zaťažujúcej sily.
Iným príkladom šmykového namáhania je namáhanie nitu spájajúceho dva pásové
nosníky (obr. 4.24). Nit je namáhaný šmykovým napätím v reze A-A. Jeho hodnota je
2π
4
d
F
S
F
Obr. 4.23. Spoj vytvorený vidli-
cou a čapom. V prierezoch A-A
a B-B je namáhaný šmykovým
napätím.
Obr. 4.24. Namáhanie nosníkov ťahom sa snaží v priereze
A-A nit ustrihnúť.
A
A
B
B
d
F
-FA A F
-F
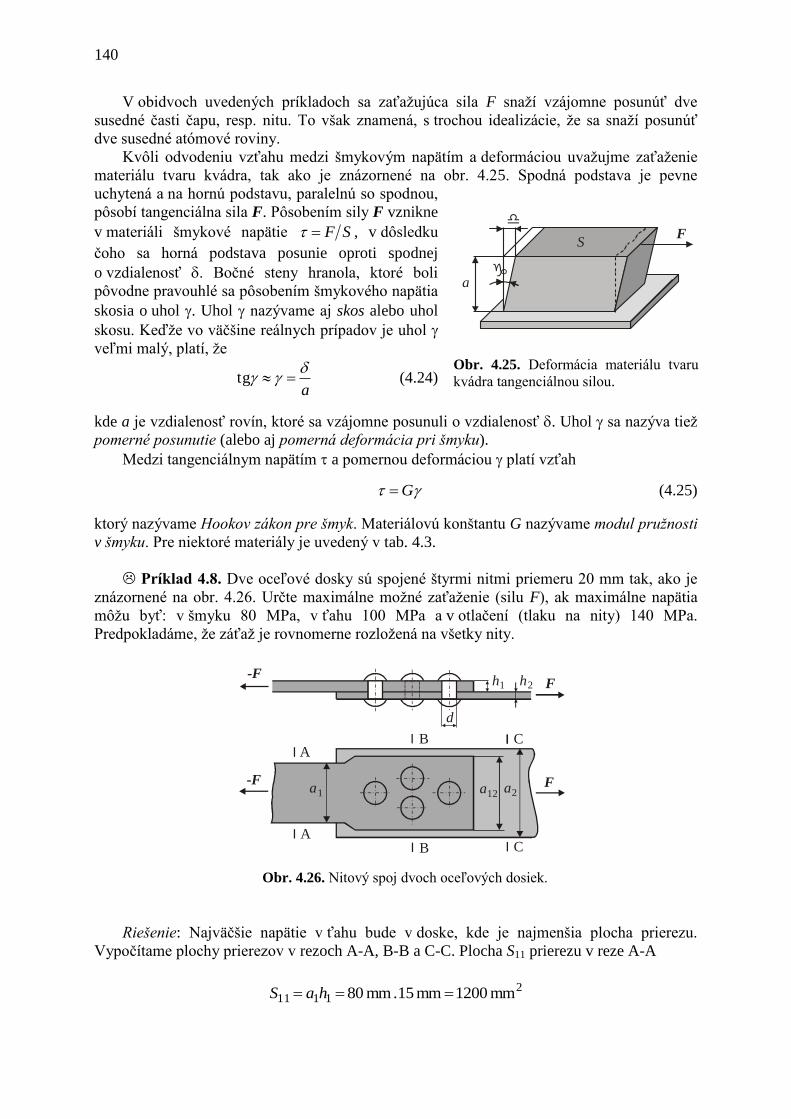
140
V obidvoch uvedených príkladoch sa zaťažujúca sila F snaží vzájomne posunúť dve
susedné časti čapu, resp. nitu. To však znamená, s trochou idealizácie, že sa snaží posunúť
dve susedné atómové roviny.
Kvôli odvodeniu vzťahu medzi šmykovým napätím a deformáciou uvažujme zaťaženie
materiálu tvaru kvádra, tak ako je znázornené na obr. 4.25. Spodná podstava je pevne
uchytená a na hornú podstavu, paralelnú so spodnou,
pôsobí tangenciálna sila F. Pôsobením sily F vznikne
v materiáli šmykové napätie SF , v dôsledku
čoho sa horná podstava posunie oproti spodnej
o vzdialenosť . Bočné steny hranola, ktoré boli
pôvodne pravouhlé sa pôsobením šmykového napätia
skosia o uhol . Uhol nazývame aj skos alebo uhol
skosu. Keďže vo väčšine reálnych prípadov je uhol
veľmi malý, platí, že
a
tg (4.24)
kde a je vzdialenosť rovín, ktoré sa vzájomne posunuli o vzdialenosť . Uhol sa nazýva tiež
pomerné posunutie (alebo aj pomerná deformácia pri šmyku).
Medzi tangenciálnym napätím a pomernou deformáciou platí vzťah
G (4.25)
ktorý nazývame Hookov zákon pre šmyk. Materiálovú konštantu G nazývame modul pružnosti
v šmyku. Pre niektoré materiály je uvedený v tab. 4.3.
Príklad 4.8. Dve oceľové dosky sú spojené štyrmi nitmi priemeru 20 mm tak, ako je
znázornené na obr. 4.26. Určte maximálne možné zaťaženie (silu F), ak maximálne napätia
môžu byť: v šmyku 80 MPa, v ťahu 100 MPa a v otlačení (tlaku na nity) 140 MPa.
Predpokladáme, že záťaž je rovnomerne rozložená na všetky nity.
Riešenie: Najväčšie napätie v ťahu bude v doske, kde je najmenšia plocha prierezu.
Vypočítame plochy prierezov v rezoch A-A, B-B a C-C. Plocha S11 prierezu v reze A-A
2
1111 mm 1200mm 15 . mm 80 haS
Obr. 4.25. Deformácia materiálu tvaru
kvádra tangenciálnou silou.
Obr. 4.26. Nitový spoj dvoch oceľových dosiek.
F
a
S
d
g
A
A
B
B
C
C
a a a1
1
12 2
2
d
h h F
F
-F
-F

141
Plocha S12 prierezu ľavej dosky v reze B-B
211212 mm 009mm 15 . mm 20 . 2-mm 1002 hdaS
Plocha S21 prierezu pravej dosky v reze B-B
22221 mm 008mm 10 . mm 20 . 2-mm 1202 hdaS
Plocha S22 prierezu pravej dosky v reze C-C
22222 mm 1200mm 10 . mm 120 haS
Najmenšia plocha prierezu kolmého na zaťažujúcu silu je 221 mm 800S . Teda
z hľadiska namáhania ťahom je povolená maximálna sila
kN 80N 108m 8.10 . Pa 10100 42-4621dovtťah ..S.F
Šmykom sú namáhané štyri priečne rezy nitov. Z hľadiska namáhania šmykom je
povolená maximálna sila
kN 101N 10011m 2.10 . π. Pa 1080π4
π44 522-62
dov
2
dovdovš .,.d.d
.S.F
Nity sú ďalej namáhanie tlakom. Vyššie tlakové napätie bude na časť nitov
nachádzajúcich sa v pravej doske (má menšiu hrúbku). Z hľadiska tlaku môže na spoj pôsobiť
maximálna sila
kN 112N 10121m 2.10 . m 1.10 . 4 . Pa 101404 5-2-262dovtlak .,.d.h.F
Z porovnania vyššie vypočítaných síl vidno, že najmenšia sila je 80 kN a to je teda sila,
ktorú nesmieme prekročiť, aby neprišlo k poruche spoja.
4.7 Súvis medzi modulom pružnosti v ťahu E a modulom pružnosti
v šmyku G
Skôr než začneme odvodzovať súvis medzi E a G uvažujme namáhanie materiálu tvaru
kocky s hranou dĺžky a ťahovou silou veľkosti F vo vodorovnom smere a tlakovou silou
rovnakej veľkosti F vo zvislom smere (obr. 4.27).
Relatívna zmena dĺžky vo vodorovnom smere je
S
F
ES
F
E
11v (4.26)
kde druhý člen je relatívne rozšírenie v dôsledku pôsobenia
tlakovej sily. Vzťah (4.26) možno ďalej upraviť takto
ES
F
E
11v (4.27)
Relatívna zmena dĺžky vo zvislom smere bude
rovnaká, má však opačné znamienko
Obr. 4.27. Namáhanie materiálu
tvaru kocky súčasným ťahom a tla-
kom. Sily F´a F majú rovnakú
veľkosť.
F
-F´
F´
-Fa
a

142
E
1z (4.28)
Nech na tú istú kocku pôsobia teraz šmykové sily veľkosti F tak, ako je znázornené na
obr. 4.28a. Uvedomme si, že všetky štyri sily musia byť rovnako veľké aby bola kocka
v rovnováhe – výsledný moment síl musí sa rovnať nule. V tomto prípade hovoríme, že kocka
sa nachádza v stave „čistého šmyku“. Tieto šmykové sily zdeformujú kocku tak, ako je
znázornené na obr. 4.28b. Rovnakú deformáciu kocky dostaneme aj pôsobením kombinácie
navzájom kolmých ťahových a tlakových, rovnako veľkých síl, ktoré zvierajú s pôvodnými
stenami kocky uhol 45°. Napätie a deformácie sú rovnaké, aké by boli vo väčšom bloku
daného materiálu, na ktorý pôsobia sily ako na obr. 4.28c. Takýto problém sme však už riešili
v úvode tejto časti. Podľa vzťahov (4.27) a (4.28) absolútne hodnoty relatívneho predĺženia
uhlopriečky v a relatívneho skrátenia uhlopriečky u sú rovnaké
Eu
u
1
v
v (4.29)
pričom je normálové napätie pôsobiace na plochu S , ktorú dostaneme, keď presekneme
kocku rovinou pozdĺž uhlopriečky u. Toto napätie možno vyjadriť vzťahom
S
F (4.30)
kde plocha 2aS .
Vzťah (4.30) možno odvodiť nasledujúco: Silu F možno rozložiť na ťahovú silu tF
kolmú na uhlopriečku u a tlakovú silu pF kolmú na uhlopriečku v (pozri obr. 4.28b). Možno
teda písať 2
t2
p2
t2 2FFFF
lebo sily tF a pF sú rovnako veľké. Potom sila FF2
1t . Na plochu S pôsobia však dve
takéto sily, preto výsledná ťahová sila pôsobiaca kolmo na plochu S je FFF 22 tt .
Obr. 4.28. Deformácia materiálu tvaru kocky šmykovými silami.
F F
F
F
F´
F´
F´F
F´
F
F
F
F
F
tt
t
t
t
t
t
t
a
a
S
S´S´
u u u
v v v
t
t
tp
p
p
a) b) c)

143
Plocha S je však SaauaS 2.2 . Výsledné napätie v ťahu pôsobiace v tejto ploche
je potom
S
F
S
F
S
F
2
2tt
Podobne, na plochu, v ktorej leží uhlopriečka
v pôsobí tlakové napätie rovnako veľké
S
F tp (4.31)
čím je vzťah (4.30) odvodený.
Ako sme už uviedli, vyjadrujeme deformáciu pri
šmyku pomocou uhla , obr. 4.29. Posunutia sú malé,
preto možno písať
u
u
u
u
atg
2
2
2 (4.32)
lebo 2222 2 uuu .
Ďalej, šmykové napätie pôsobiace v ploche S je SF a rovná sa napätiu vo
vzťahu (4.31), resp. (4.29).
Keď teraz skombinujeme vzťahy (4.29) a (4.32) dostaneme
E
12
a keď za dosadíme G dostaneme hľadaný súvis medzi modulom pružnosti v šmyku
(torzii) G a modulom pružnosti v ťahu E
12
EG (4.33)
Častokrát sa tento vzťah uvádza aj pomocou Poissonovej konštanty 1m . Potom
12
m
mEG (4.33´)
Príklad 4.9. Drôt pôvodnej dĺžky 5 m je na jednom konci upevnený a na druhom
konci napínaný v smere dĺžky silou 2500 N, čím sa predĺži o 0,2 cm. Nájdite pôvodný priemer
drôtu ako aj zmenu priemeru pri pôsobení napínacej sily. Modul pružnosti drôtu v ťahu je
Pa 102 11. a modul pružnosti v torzii je Pa. 1087 10.,
Riešenie: Pri riešení vychádzame z Hookovho zákona
0
E
S
F
Obr. 4.29. Deformácia kocky materiálu
tangenciálnou silou.
d
Du D
u
g
a
a
u
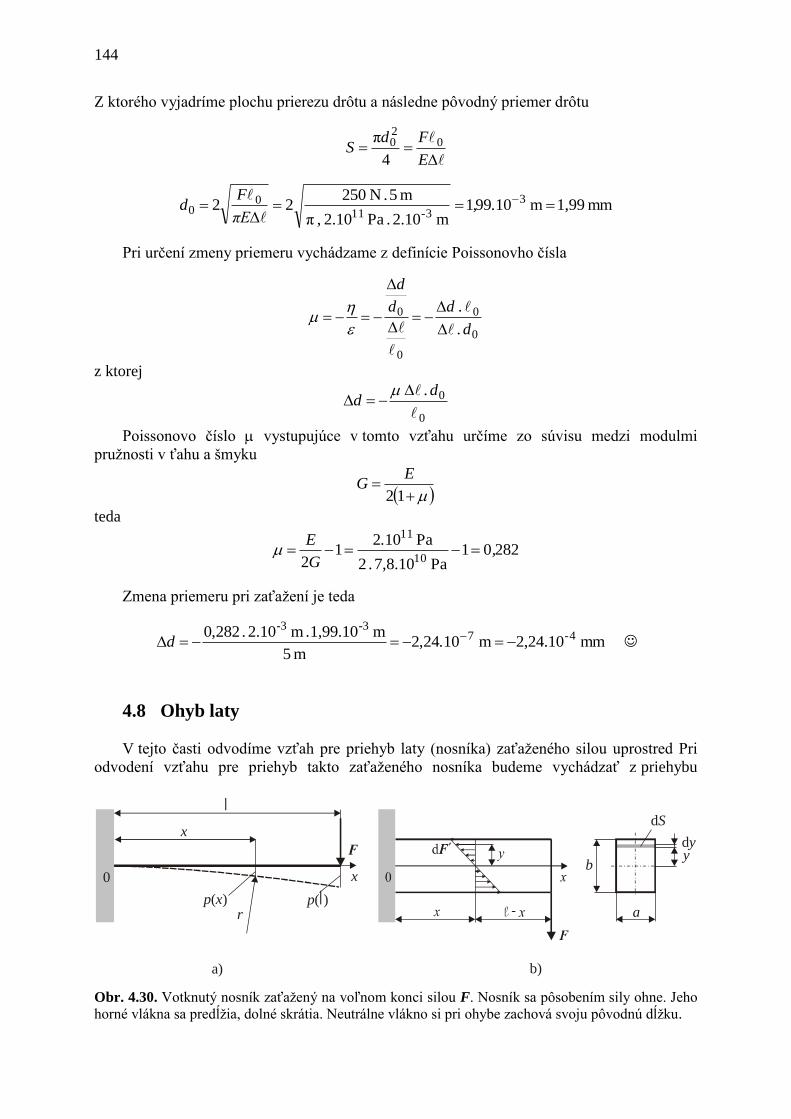
144
Z ktorého vyjadríme plochu prierezu drôtu a následne pôvodný priemer drôtu
E
FdS 0
20
4
π
mm 1,99m 10991m 2.10 . Pa 2.10 , π
m 5 . N 25022 3
3-11
00
.,
πE
Fd
Pri určení zmeny priemeru vychádzame z definície Poissonovho čísla
0
0
0
0
.
.
d
dd
d
z ktorej
0
0 .
dd
Poissonovo číslo vystupujúce v tomto vzťahu určíme zo súvisu medzi modulmi
pružnosti v ťahu a šmyku
12
EG
teda
28201Pa 7,8.10 . 2
Pa 1021
2 10
11
,.
G
E
Zmena priemeru pri zaťažení je teda
mm 2,24.10m 1024,2m 5
m 1,99.10 . m 2.10 . 282,0 4-7-3-3
.d
4.8 Ohyb laty
V tejto časti odvodíme vzťah pre priehyb laty (nosníka) zaťaženého silou uprostred Pri
odvodení vzťahu pre priehyb takto zaťaženého nosníka budeme vychádzať z priehybu
Obr. 4.30. Votknutý nosník zaťažený na voľnom konci silou F. Nosník sa pôsobením sily ohne. Jeho
horné vlákna sa predĺžia, dolné skrátia. Neutrálne vlákno si pri ohybe zachová svoju pôvodnú dĺžku.
p x( )
x
x
l
p( )l
0
r
ydy
a
b
dS
a) b)

145
votknutého nosníka zaťaženého na voľnom konci silou F (obr. 4.30a). Na obr. 4.30b je kvôli
názornosti nosník nakreslený v proporcionálnom nepomere priečnych rozmerov k dĺžke.
V našich úvahách vlastnú tiaž nosníka zanedbáme. Nosník sa pôsobením sily ohne. Jeho
horné vlákna sa predĺžia, dolné skrátia. Medzi nimi je tzv. neutrálne vlákno, ktoré si pri ohybe
zachová svoju pôvodnú dĺžku. Toto vlákno prechádza ťažiskom prierezu tyče.
Vo vzdialenosti x od votknutého konca nosníka nech má nosník priehyb xpp a
neutrálne vlákno má polomer krivosti r. V malom výseku nosníka v tomto mieste, ktorý
zodpovedá stredovému uhlu d , má neutrálne vlákno dĺžku d r . Vlákno, ktoré je
o hodnotu y nad ním má dĺžku d yr (obr. 4.31) a vlákno, ktoré je o y pod ním má dĺžku
d yr . Ich relatívna deformácia (predĺženie horného, skrátenie dolného) je rovnaká
r
y
r
yrr
r
ryr
d
d d
d
d d
Normálové napätia týchto vlákien sú rovnaké a rovnajú sa výrazu
r
yEE (4.34)
Nad neutrálnym vláknom je to ťahové napätie, pod neutrálnym
tlakové.
Ďalej vyjadríme podmienku rovnováhy pre časť nosníka od
rezu vo vzdialenosti x od votknutia až po jeho voľný koniec, kde
pôsobí vonkajšia sila F, obr. 4.30b. V rovnováhe musí platiť, že
veľkosť momentu M vonkajšej sily F je rovný veľkosti momentu
M vnútorných (pružných) síl F
MM (4.35)
kde
xFM . a FyMM d d (4.36)
Sila F d je sila, ktorou na uvažovanú koncovú časť nosníka
pôsobí napnuté elementárne vlákno. Vlákno je však v rôznych
vzdialenostiach od neutrálneho vlákna rôzne napnuté. Ak
predpokladáme, že elementárne vlákno má plochu priečneho rezu
Sd (obr. 4.30b) a keď za dosadíme zo vzťahu (4.34), F d je
Syr
EF d d (4.37)
Moment vnútorných síl potom je
r
EISy
r
EM d 2 (4.38)
Integrál SyI d 2 nazývame plošný moment zotrvačnosti.
Ako sme už spomínali, v rovnováhe musí platiť vzťah (4.35), ktorý možno teraz napísať
ako
r
EIxF . (4.39)
Obr. 4.31. Vlákna nad ne-
utrálnym vláknom sa pre-
dlžujú, pod ním sa skracujú.
r d( + ) dr y
d

146
Prevrátenú hodnotu polomeru krivosti možno vyjadriť ako (pozri pozn. na konci tejto
časti)
2
2
d
d1
x
xp
r
Dosadením tohto vyjadrenia do rovnice (4.39) dostaneme rovnicu
x
EI
F
x
xp
2
2
d
d
ktorej riešením je priehyb nosníka v mieste x
62
32 xx
EI
Fxp
(4.40)
Najväčší priehyb je na konci nosníka ( x ), teda
EI
Fp
3
3 (4.41)
V prípade, že prierez je obdĺžnik so šírkou a a výškou b, plošný moment zotrvačnosti
prierezu vzhľadom na vodorovnú os idúcu ťažiskom rezu je
32
2
22
12
1 d d abyaySyI
b
b
Potom vzťah (4.41) nadobudne tvar
3
34
Eab
Fp
(4.42)
Keď je nosník podoprený na obidvoch koncoch a zaťažený uprostred silou F (obr. 4.32),
účinok sily F je taký istý, aký by vyvolali sily opačného smeru a veľkosti 2F na koncoch
nosníka, keby bol nosník upevnený
v prostriedku. Potom priehyb uprostred je
3
3
3
3
4
2
2 4
Eab
F
Eab
F
p
(4.43)
Poznámka: Dĺžku krivky (obr. 4.33a) možno vypočítať ako
xyx
x
y
x
xyxs d1d
d
d
d
dddd
22
2
2
2
222
Z obr. 4.33b však tiež
Obr. 4.32. Nosník podopretý na obidvoch koncoch
a zaťažený uprostred silou F.
- /2F- /2F
F
l /2 l /2
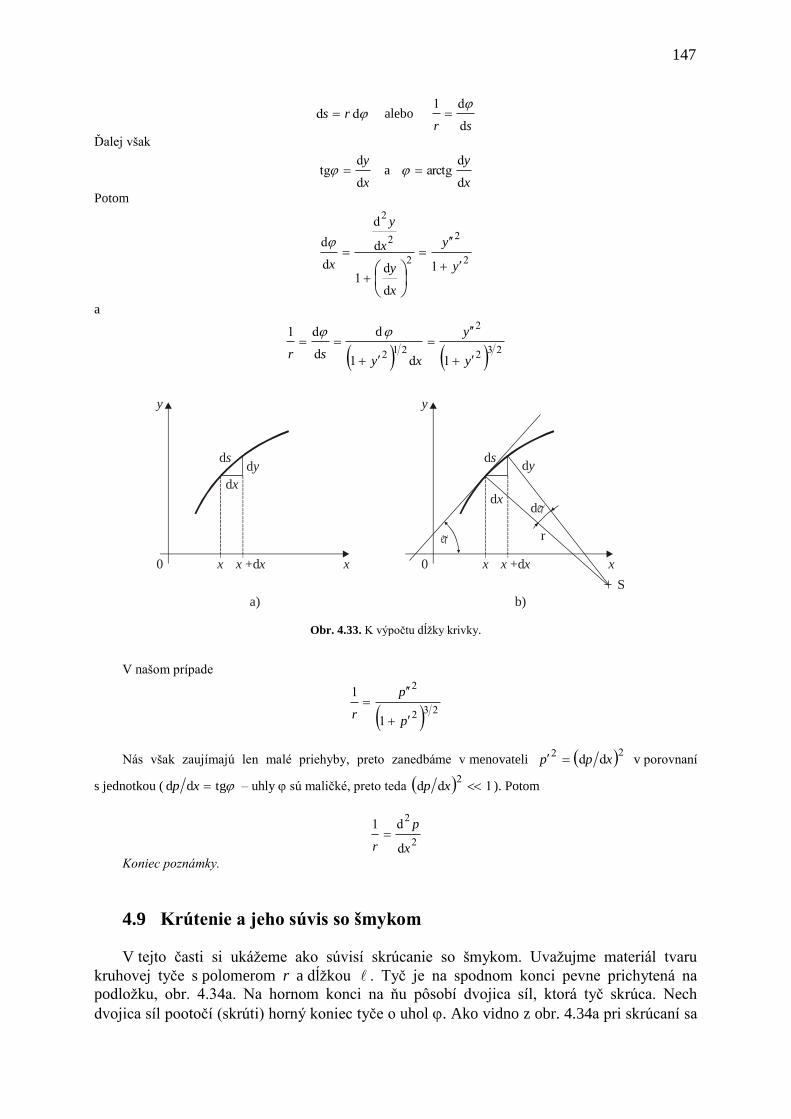
147
d d rs alebo sr d
d1
Ďalej však
x
y
d
dtg a
x
y
d
darctg
Potom
2
2
2
2
2
1
d
d1
d
d
d
d
y
y
x
y
x
y
x
a
232
2
2121d1
d
d1
y
y
xysr
d
V našom prípade
232
2
1
1
p
p
r
Nás však zaujímajú len malé priehyby, preto zanedbáme v menovateli 22dd xpp v porovnaní
s jednotkou ( tgdd xp – uhly sú maličké, preto teda 1dd2xp ). Potom
2
2
d
d1
x
p
r
Koniec poznámky.
4.9 Krútenie a jeho súvis so šmykom
V tejto časti si ukážeme ako súvisí skrúcanie so šmykom. Uvažujme materiál tvaru
kruhovej tyče s polomerom r a dĺžkou . Tyč je na spodnom konci pevne prichytená na
podložku, obr. 4.34a. Na hornom konci na ňu pôsobí dvojica síl, ktorá tyč skrúca. Nech
dvojica síl pootočí (skrúti) horný koniec tyče o uhol . Ako vidno z obr. 4.34a pri skrúcaní sa
Obr. 4.33. K výpočtu dĺžky krivky.
y y
ds dsdy dy
dxdx
x x+d x x+dx xx x0 0
r
d
S
a) b)
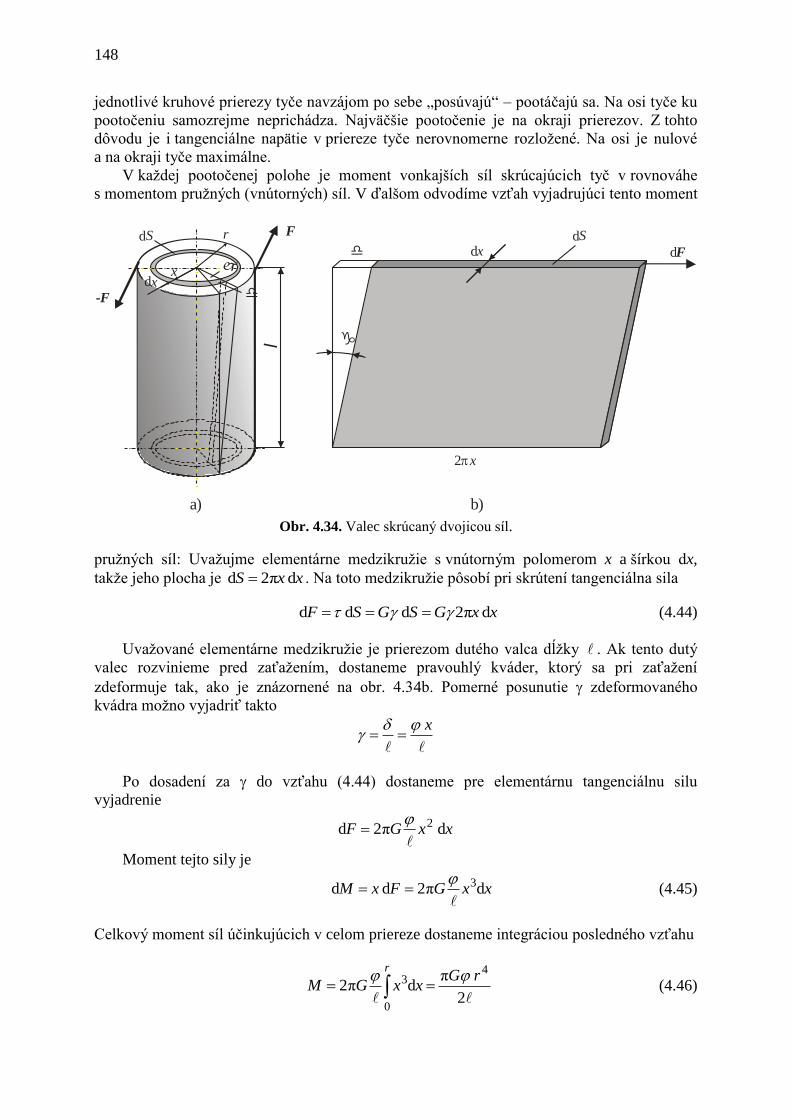
148
jednotlivé kruhové prierezy tyče navzájom po sebe „posúvajú“ – pootáčajú sa. Na osi tyče ku
pootočeniu samozrejme neprichádza. Najväčšie pootočenie je na okraji prierezov. Z tohto
dôvodu je i tangenciálne napätie v priereze tyče nerovnomerne rozložené. Na osi je nulové
a na okraji tyče maximálne.
V každej pootočenej polohe je moment vonkajších síl skrúcajúcich tyč v rovnováhe
s momentom pružných (vnútorných) síl. V ďalšom odvodíme vzťah vyjadrujúci tento moment
pružných síl: Uvažujme elementárne medzikružie s vnútorným polomerom x a šírkou dx,
takže jeho plocha je xxS d π2d . Na toto medzikružie pôsobí pri skrútení tangenciálna sila
xxGSGSF d π2d d d (4.44)
Uvažované elementárne medzikružie je prierezom dutého valca dĺžky . Ak tento dutý
valec rozvinieme pred zaťažením, dostaneme pravouhlý kváder, ktorý sa pri zaťažení
zdeformuje tak, ako je znázornené na obr. 4.34b. Pomerné posunutie zdeformovaného
kvádra možno vyjadriť takto
x
Po dosadení za do vzťahu (4.44) dostaneme pre elementárnu tangenciálnu silu
vyjadrenie
xxGF d π2d 2
Moment tejto sily je
xxGFxM dπ2d d 3
(4.45)
Celkový moment síl účinkujúcich v celom priereze dostaneme integráciou posledného vzťahu
2
πdπ2
4
0
3 rGxxGM
r
(4.46)
Obr. 4.34. Valec skrúcaný dvojicou síl.
xdx
dx
r
d
d
l
dS dS
dF
F
-F
g
2px
a) b)

149
Pretože pri skrúcaní tyče sa uplatňuje modul pružnosti v šmyku G, nazývame tento modul
aj modulom pružnosti v torzii.
Vzťah (4.46), ak poznáme veľkosť momentu vonkajších síl M, možno použiť na určenie
modulu pružnosti v torzii
4 π
2
r
MG
(4.47)
4.10 Zovšeobecnený Hookov zákon
Hookov zákon platný pre jednoosové namáhanie môže byť rozšírený na dvojosové
a trojosové namáhanie , s ktorým sa možno stretnúť v inžinierskej praxi. Pri nasledujúcich
úvahách sa budeme opierať o isté experimentálne fakty: Normálové napätie nezapríčiňuje
šmykovú deformáciu a šmykové napätie produkuje len šmykovú deformáciu. Keďže
uvažujeme len malé deformácie, možno použiť pri viacosovom namáhaní princíp
superpozície. Tieto predpoklady platia pre izotropné materiály namáhané v lineárnej elastickej
oblasti.
Uvažujme namáhanie izotropného materiálu tvaru kocky ťahovými normálovými
napätiami v smere osí x, y, z (obr. 4.35). Namáhanie v smere osi x spôsobí predĺženie kocky
v smere x a pre pomernú deformáciu platí vzťah
E
xxx
Priečne namáhania (v smere osí y a z) však spôsobia kontrakciu (skrátenie) v smere osi x
a pre túto kontrakciu platia vzťahy
E
yxy
E
zxz
Potom celková pomerná deformácia v smere osi x je
zyxxE
1
(4.48)
Obr. 4.35. Namáhanie izotropného mate-
riálu tvaru kocky ťahovými normálovými
napätiami v smere osí x, y, z.
Obr. 4.36. Namáhanie izotropného mate-
riálu tvaru kocky pôsobením čistých šmy-
kových napätí .
s
x
y
yz
sx
sy
s
s
z
z
sx
x
y
yz
z
tt
xyt
xzt
xyt
xzt
yzt

150
Analogický vzťah platí aj pre pomernú deformáciu y v smere osi y a pre pomernú
deformáciu z v smere osi z.
Okrem ťahových napätí uvažujme aj pôsobenie čistých šmykových napätí na kocku
(obr. 4.36). Keďže ide o čisté šmykové namáhania platia medzi a pomernými šmykovými
deformáciami vzťahy tvaru
G
Po zosumarizovaní našich úvah možno napísať nasledujúcu sústavu rovníc
zyxxE
1
zxyyE
1
(4.49)
yxzzE
1
G
xyxy
G
yzyz
G
xzxz
ktorú nazývame zovšeobecnený Hookov zákon. Poznamenávame, že kladné hodnoty pre
napätie (resp. deformáciu) odpovedajú namáhaniu ťahom (predĺženiu) a záporné pre
namáhanie tlakom (skráteniu) t. j., keď niektoré normálové napätie je tlakové, zmení sa
znamienko v odpovedajúcom člene rovníc (4.49).
Príklad 4.10. Na nízky liatinový valec pôsobí axiálne i radiálne tlakové napätie.
Axiálne má hodnotu 50 MPa a radiálne 20 MPa. Modul pružnosti v ťahu liatiny je 100 GPa
a Poissonovo číslo 0,25. Rozmery valca sú: výška 200 mm a priemer 120 mm. Vypočítajte
zmenu dĺžky, priemeru a objemu valca pri pôsobení uvedených napätí.
Riešenie: Uvedomme si, že valec je podrobený tlaku, preto
MPa 50x a MPa. 10 zy Dôležité sú aj znamienka
– pri namáhaní ťahom by boli kladné. Pomerné deformácie podľa
vzťahov (4.49) sú
zyxxE
1
466
9105,4 Pa .101010 . 250Pa 1050
Pa 10100
1 .,..
566
9105Pa 101050 . 25,0Pa 1010
Pa 10100
11 ....E
zxyy
566
9105Pa .101050 . 0,25Pa 1010
Pa 10100
11 ...E
yxzz
Obr. 4.37. K príkladu 4.10.
x
yzl
d

151
Zmena výšky je
mm 09,0 mm 200 . 105,4 40 ..x
Zmena priemeru ( zy )
mm 0,006 mm 120 . 105 50 .d.d
Zmena objemu
mm 200
4
mm 120 . π . 5.10 . 21054
4
π . 2
25-4
0
20
0 ..,.d
VV xzyx
3mm 792
Negatívne znamienka značia, že ide o pokles a kladné, že ide o nárast. Výška valca sa
teda zmenšila, rovnako aj objem, ale priemer narástol.
4.11 Potenciálna energia pružnej deformácie
Pri elastických deformáciách je práca vonkajších deformujúcich síl transformovaná na
potenciálnu energiu napätosti. Pri dokonale pružnom telese sa táto energia počas odľahčenia
(zrušenia zaťaženia) celá spotrebuje na návrat telesa do pôvodného tvaru.
Uvažujme deformáciu telesa tvaru tyče pôvodnej dĺžky 0 ťahom. Vonkajšia sila
veľkosti xF spôsobí predĺženie tyče o hodnotu x. Z Hookovho zákona platného pre jednoosé
namáhanie dostaneme pre silu xF takéto vyjadrenie
xSE
Fx0
kde S je plocha prierezu tyče. Elementárna práca tejto sily je rovná prírastku potenciálnej
energie napätosti
xxSE
xFEW d d dd0
p
(4.50)
Celkovú energiu naakumulovanú v telese pri predĺžení o dostaneme integráciou
vzťahu (4.50)
2
d 2
00 0p
SExx
SEE (4.51)
Hustota potenciálnej energie pw pružnej deformácie je energia akumulovaná v jednotke
objemu telesa, teda
2
2
00
ppp
2
1
2
1EE
S
E
V
Ew
(4.52)

152
čo možno vyjadriť aj vzťahom (keď použijeme E )
Ew
2
p2
1 (4.53)
resp. vzťahom
2
1p w (4.54)
Súhrn
4.1 Úvod
Tuhé telesá sa pôsobením vonkajších síl deformujú. Niektoré viac, iné menej. Deformácia
telies vyrobených z rôznych materiálov je pôsobením tej istej sily rôzna. Tento fakt súvisí
s vnútornou štruktúrou telies, s väzbovými silami pôsobiacimi medzi atómami, resp.
molekulami. Veľkú rolu tu hrajú tiež „nečistoty“ – atómy iných prvkov nachádzajúcich sa
v základnom materiáli, ďalej rôzne mikro a makro poruchy v materiáli. Ak na teleso pôsobí
sila v smere jeho telesnej osi, môže ho predĺžiť alebo skrátiť. Vtedy hovoríme o namáhaní
v ťahu, resp. v tlaku. Sily pôsobiace kolmo na os sa snažia odstrihnúť (resp. posunúť) jednu
časť tyče od druhej – hovoríme o namáhaní v šmyku. Krútiaci moment sily je moment sily,
ktorý sa snaží točiť tyč okolo jej osi. Moment sily pôsobiacej kolmo na tyč sa snaží ju ohnúť –
hovoríme o ohybovom momente.
4.2 Charakteristika tuhých látok
4.2.1 Rozdelenie tuhých látok. Všetky tuhé látky možno rozdeliť na kryštalické a amorfné v
závislosti od toho, či sú atómy alebo molekuly usporiadané pravidelne alebo nie. Väčšina
tuhých látok sú látky kryštalické, ktorých atómy, molekuly alebo ich súbory vytvárajú
pravidelné, periodicky sa opakujúce trojrozmerné útvary. Hovoríme, že sa vyznačujú
translačnou symetriou. Charakteristickou vlastnosťou kryštálu je teda existencia usporiadania
na veľkú vzdialenosť (ďalekodosahové usporiadanie).
Amorfné tuhé látky nemajú usporiadanie na veľkú vzdialenosť. Existuje však v nich istá
usporiadanosť v bezprostrednej blízkosti (na vzdialenosti niekoľkých susedných atómov)
vybraného atómu alebo molekuly. Hovoríme, že štruktúra amorfných tuhých látok sa
vyznačuje usporiadaním na malú vzdialenosť (krátkodosahové usporiadanie).
4.2.2 Väzbové sily, väzbová energia. Schopnosť tuhých látok udržiavať tvar a objem si
vysvetľujeme pôsobením silových väzieb medzi atómami resp. molekulami, ktoré danú látku
vytvárajú. Medzi atómami musia existovať príťažlivé, ale aj odpudivé sily. Tuhé látky
môžeme v závislosti od charakteru väzbových síl rozdeliť na štyri typy: iónové kryštály,
kovalentné kryštály, kovy a molekulárne kryštály. Vymenovanie je urobené v smere poklesu
väzbovej energie. Väzbová energia je energia, ktorú musíme dodať tuhej látke aby sme ju
zmenili na súbor vzájomne neinteragujúcich atómov – teda zhruba energia potrebná na to, aby
sme tuhú látku dostali do plynného skupenstva.
4.2.3 Hustota kryštálu a medziatómové vzdialenosti. Makroskopická hustota kryštálu závisí
od hmotnosti atómov, od ich priemeru a okrem toho, od kryštálovej štruktúry, ktorá určuje
ako tesne sú usporiadané atómy.
4.2.4 Poruchy kryštálovej štruktúry. V reálnych kryštáloch vždy existuje odklon od ideálneho
pravidla: jeden uzol – jeden atóm, resp. jedna molekula. Z názvu tejto časti „poruchy“ by sa
mohlo zdať, že je to vždy len negatívny jav. Áno, niekedy sú poruchy (iným slovom defekty)
nežiaduce, ale v mnohých prípadoch sa vyvolávajú umelo s cieľom zlepšiť vlastnosti

153
materiálov alebo dokonca dodať materiálom nové požadované vlastnosti. Bez porúch
v mriežke by neboli napr. možné aj také javy ako je difúzia v tuhých látkach a plastická
deformácia materiálov. Od prítomnosti porúch závisia i iné vlastnosti materiálov, napr.
tepelná i elektrická vodivosť.
V závislosti od veľkosti porušenej oblasti delíme defekty v kryštáli na bodové, čiarové
a plošné. Medzi bodové defekty kryštálovej mriežky patrí vakancia (chýbajúci atóm v uzle),
atóm nachádzajúci sa v intersticiálnej polohe (medzi uzlami) a substitučný atóm (atóm iného
prvku nahradzujúci v uzle mriežky pôvodný atóm), pozri obr. 4.12. Atóm nachádzajúci sa
v medziuzlí môže byť atóm pôvodnej alebo aj inej látky. Čiarové poruchy nazývame aj
dislokácie. Základnými druhmi dislokácií sú hranová dislokácia a špirálová dislokácia. Na
voľných povrchoch látok v dôsledku porušenia tejto symetrie prichádza k narušeniu spôsobu
usporiadania povrchových atómov – k zmene vzdialenosti medzi nimi a ich posuvu oproti
polohám, ktoré zaujímajú v atómových rovinách v objeme kryštálu. Takto vzniká plošný
defekt. Plošné defekty vznikajú tiež na hraniciach zŕn – malých kryštálikov, z ktorých
pozostáva väčšina reálnych látok. K objemovým defektom patria póry rôzneho druhu a
veľkosti, ďalej tzv. precipitáty – iné, znečisťujúce chemické látky zaujímajúce časť objemu
kryštálu a podobne.
4.3 Mechanické vlastnosti inžinierskych materiálov
Elastické materiály sú také, ktoré po zrušení zaťaženia (pôsobiacich síl a ich momentov)
nadobudnú rozmery aké mali pred začiatkom pôsobenia zaťaženia. Elasticita teda zabraňuje
permanentnej deformácii. Zvyčajne je elastická oblasť vymedzená lineárnou závislosťou
medzi pôsobiacou silou a deformáciou (napr. predĺžením) telesa.
Materiál je plastický, ak po zrušení zaťaženia nenadobudne pôvodné rozmery a tvar.
Plastickými materiálmi a deformáciami sa v nasledujúcich častiach nebudeme zaoberať.
Húževnaté materiály sú také, ktoré sa porušia až pri pomerne veľkých zaťaženiach. Medzi
takéto materiály patrí konštrukčná oceľ a mnohé zliatiny iných kovov.
Krehké materiály, napr. liatina a betón, vykazujú malú deformáciu predtým než sa porušia
a častokrát prichádza k náhlej poruche (lomu) bez predchádzajúceho varovania.
Kompozitné materiály pozostávajú z dvoch alebo viacerých rozličných zložiek. Kompozity
zvyčajne obsahujú vysoko pevné materiály (oceľ, sklo, grafit, polyméry), zvyčajne v tvare
vlákien, ktoré sú zabudované do materiálu (napr. do betónu, živice, nylonu), ktorý nazývame
matrica. Kompozitné materiály majú väčší pomer medzi pevnosťou a hmotnosťou ako
klasické homogénne materiály. Ich výhodné vlastnosti ich predurčujú pre stále širšie použitie
v praxi.
4.4 Deformácia v ťahu a tlaku. Hookov zákon
Ak sa teleso deformuje tak, že sa jeden jeho rozmer predĺži (skráti) a priečne rozmery sa
skrátia (predĺžia), hovoríme o deformácii v ťahu (tlaku). Najjednoduchším príkladom
deformácie v ťahu je predĺženie tyče namáhanej na ťah (obr. 4.16). Tyč s pôvodnou dĺžkou 0
sa pôsobením sily veľkosti F predĺži o hodnotu 0 , kde je dĺžka tyče pri pôsobení
sily F. Ako miera deformácie v ťahu sa používa veličina nezávislá od pôvodnej dĺžky, a to
relatívne predĺženie definované vzťahom
0
(4.3)
Účinok sily F sa rozkladá po celej ploche prierezu S, takže za mieru namáhania materiálu
považujeme mechanické normálové napätie definované vzťahom

154
S
F (4.4)
Jeho jednotkou je Pa1mN 1 2 (pascal).
Mechanické vlastnosti materiálu pri namáhaní v ťahu a tlaku sú charakterizované závislosťou
f , zvyčajne vo forme grafu, ktorý nazývame pracovný diagram. Každý druh
materiálu má svoj pracovný diagram. Medzi pomerným predĺžením a normálovým napätím
je spočiatku lineárna závislosť
E (4.5)
ktorá je vyjadrením Hookovho zákona. Materiálová konštanta E sa nazýva modul pružnosti
v ťahu (tlaku) alebo aj Youngov modul pružnosti.
Pri namáhaní tyče ťahom sa okrem zmeny dĺžky súčasne menia aj priečne rozmery. Keď
berieme do úvahy namáhanie tyče s kruhovým prierezom s pôvodným priemerom 0d ,
relatívnu zmenu priečneho rozmeru možno vyjadriť takto
0
0
0 d
dd
d
d
(4.6)
kde d je priemer tyče pri danom zaťažení. Pri kladnej pozdĺžnej deformácii, čiže pri namáhaní
ťahom 0dd a teda 0 . Pri namáhaní tlakom 0dd a 0 .
Podiel pomerného priečneho skrátenia a pomerného predĺženia
(4.7)
sa nazýva Poissonovo číslo. Jeho prevrátená hodnota 1m sa nazýva Poissonova
konštanta. Obidve veličiny sú bezrozmerné. Znamienko mínus vo vzťahu (4.7) značí, že
pozdĺžna deformácia má opačný charakter ako priečna deformácia. Keď sa tyč predĺži,
priečny rozmer sa skráti a naopak.
Dĺžku tyče pri zaťažení ťahovým napätím určíme úpravou vzťahu
0
0
E
teda
E
10 (4.8)
Priečny rozmer d pri zaťažení tyče ťahovým napätím určíme úpravou vzťahu
0
0
d
dd
keď do neho dosadíme E
Edd
10 (4.9)

155
4.5 Homogénna deformácia stlačením
Relatívnu zmenu objemu hranola pri zaťažení všestranným tlakom možno vyjadriť vzťahom
zyxV
V
0
(4.18´)
Vzťah (4.18´) možno ďalej upraviť takto
213
0
EV
V (4.19)
Pri objemových deformáciách je zvykom používať vzťah tvaru
0V
VKp
(4.20)
kde p je tlak a K – modul objemovej pružnosti. Jeho prevrátená hodnota
p
V
VK
0
11 (4.21)
sa nazýva objemová stlačiteľnosť.
Porovnaním vzťahov (4.19) a (4.20) dostaneme, že
213
EK (4.22)
Z tohto vzťahu vidno prečo musí byť 5,0 . Keby tak nebolo, bolo by K záporné a látka by
sa pri zvyšovaní tlaku rozpínala a to by umožňovalo získať z pôvodného hranola energiu, čo
nie je možné.
4.6 Deformácia v šmyku. Hookov zákon pre šmyk
O namáhaní šmykom hovoríme vtedy, keď sa zaťažujúca sila snaží posunúť jednu časť telesa
vzhľadom na jeho susednú časť. Šmykové napätie pôsobí v rovine paralelnej so smerom
zaťažujúcej sily. Kvôli odvodeniu vzťahu medzi šmykovým napätím a deformáciou uvažujme
zaťaženie materiálu tvaru kvádra. Spodná podstava je pevne uchytená a na hornú podstavu,
paralelnú so spodnou, pôsobí tangenciálna sila F. Pôsobením sily F vznikne v materiáli
šmykové napätie SF , v dôsledku čoho sa horná podstava posunie oproti spodnej
o vzdialenosť . Bočné steny hranola, ktoré boli pôvodne pravouhlé sa pôsobením šmykového
napätia skosia o uhol . Uhol nazývame aj skos alebo uhol skosu. Keďže vo väčšine
reálnych prípadov je uhol veľmi malý, platí, že
a
tg (4.24)
kde a je vzdialenosť rovín, ktoré sa vzájomne posunuli o vzdialenosť . Uhol sa nazýva tiež
pomerné posunutie (alebo aj pomerná deformácia pri šmyku).
Medzi tangenciálnym napätím a pomernou deformáciou platí vzťah
G (4.25)
ktorý nazývame Hookov zákon pre šmyk. Materiálovú konštantu G nazývame modul pružnosti
v šmyku.
156
4.7 Súvis medzi modulom pružnosti v ťahu E a modulom pružnosti v šmyku G
Súvis medzi modulom pružnosti v šmyku (torzii) G a modulom pružnosti v ťahu E je
vyjadrený vzťahom
12
EG (4.33)
kde je Poissonovo číslo. Častokrát sa tento vzťah uvádza aj pomocou Poissonovej konštanty
1m . Potom
12
m
mEG (4.33´)
4.8 Ohyb laty
Skúmame priehyb laty (nosníka) zaťaženej silou uprostred Nosník sa pôsobením sily ohne.
Jeho horné vlákna sa predĺžia, dolné skrátia. Medzi nimi je tzv. neutrálne vlákno, ktoré si pri
ohybe zachová svoju pôvodnú dĺžku. Toto vlákno prechádza ťažiskom prierezu tyče.
Pre priehyb votknutého nosníka v mieste x od votknutia je
62
32 xx
EI
Fxp
(4.40)
a najväčší priehyb je na konci nosníka ( x ), teda
EI
Fp
3
3 (4.41)
Priehyb nosníka zaťaženého uprostred silou F je možno vypočítať podľa vzťahu
3
3
4Eab
Fp
(4.43)
4.9 Krútenie a jeho súvis so šmykom
Uvažujme materiál tvaru kruhovej tyče s polomerom r a dĺžkou . Tyč je na spodnom konci
pevne prichytená na podložku. Na hornom konci na ňu pôsobí dvojica síl, ktorá tyč skrúca.
Nech dvojica síl pootočí (skrúti) horný koniec tyče o uhol . Pri skrúcaní sa jednotlivé
kruhové prierezy tyče navzájom po sebe „posúvajú“ – pootáčajú sa. Na osi tyče ku pootočeniu
samozrejme neprichádza. Najväčšie pootočenie je na okraji prierezov. Z tohto dôvodu je
i tangenciálne napätie v priereze tyče nerovnomerne rozložené. Na osi je nulové a na okraji
tyče maximálne. Celkový moment síl účinkujúcich v celom priereze tyče možno vyjadriť
vzťahom
2
π 4rGM
(4.46)
Pretože pri skrúcaní tyče sa uplatňuje modul pružnosti v šmyku G, nazývame tento modul aj
modulom pružnosti v torzii.
Vzťah (4.46), ak poznáme veľkosť momentu vonkajších síl M, možno použiť na určenie
modulu pružnosti v torzii
4 π
2
r
MG
(4.47)

157
4.10 Zovšeobecnený Hookov zákon
Sústavu rovníc
zyxxE
1
zxyyE
1
(4.49)
yxzzE
1
G
xyxy
G
yzyz
G
xzxz
nazývame zovšeobecnený Hookov zákon. zyx , , sú pomerné predĺženia (skrátenia)
v smere osí x, y a z; zyx , , sú normálové napätia v smere príslušných osí; je
Poissonovo číslo Poznamenávame, že kladné hodnoty pre napätie (resp. deformáciu)
odpovedajú namáhaniu ťahom (predĺženiu) a záporné pre namáhanie tlakom (skráteniu) t. j.,
keď niektoré normálové napätie je tlakové, zmení sa znamienko v odpovedajúcom člene
rovníc (4.49). xzyzxy , , sú tangenciálne napätia a xzyzxy , , sú k nim príslušné pomerné
deformácie.
4.11 Potenciálna energia pružnej deformácie
Pri elastických deformáciách je práca vonkajších deformujúcich síl transformovaná na
potenciálnu energiu napätosti. Pri dokonale pružnom telese sa táto energia počas odľahčenia
(zrušenia zaťaženia) celá spotrebuje na návrat telesa do pôvodného tvaru. Celkovú energiu
naakumulovanú v telese pri predĺžení o vyjadruje vzťah
2
2
0p
SEE (4.51)
Hustota potenciálnej energie pw pružnej deformácie je energia akumulovaná v jednotke
objemu telesa, teda
2
2
00
ppp
2
1
2
1EE
S
E
V
Ew
(4.52)
čo možno vyjadriť aj vzťahom (keď použijeme E )
Ew
2
p2
1 (4.53)
resp. vzťahom
2
1p w (4.54)
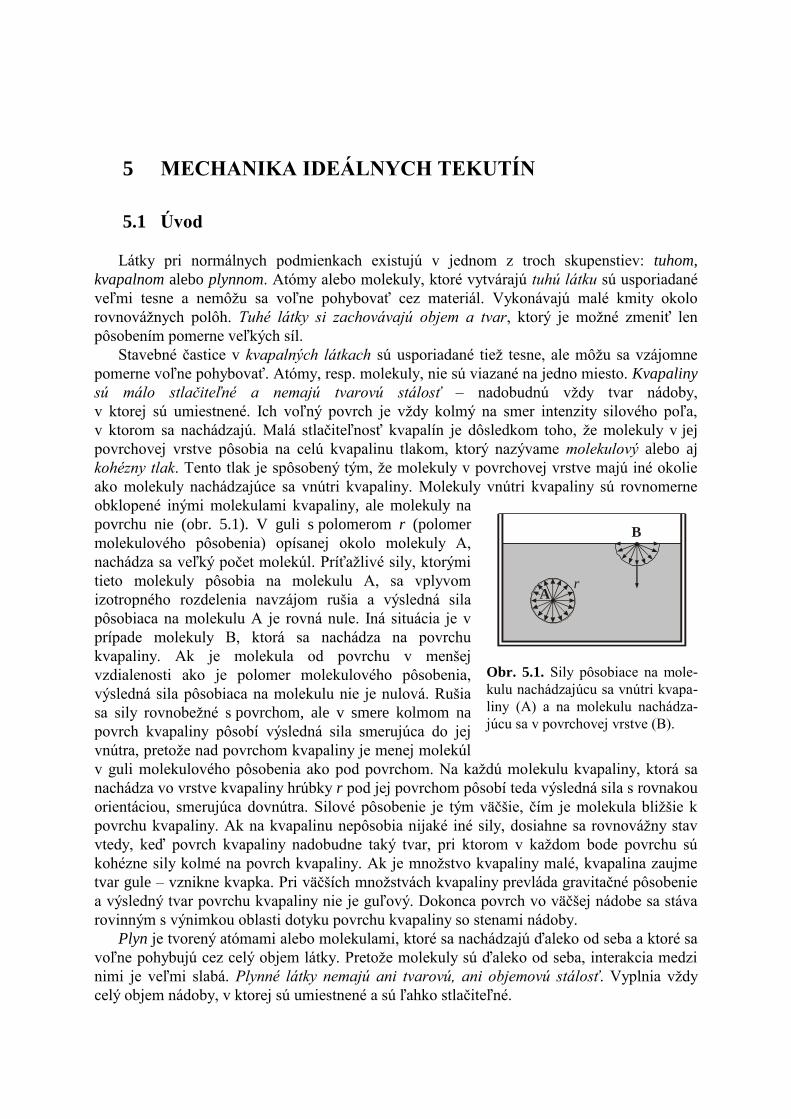
5 MECHANIKA IDEÁLNYCH TEKUTÍN
5.1 Úvod
Látky pri normálnych podmienkach existujú v jednom z troch skupenstiev: tuhom,
kvapalnom alebo plynnom. Atómy alebo molekuly, ktoré vytvárajú tuhú látku sú usporiadané
veľmi tesne a nemôžu sa voľne pohybovať cez materiál. Vykonávajú malé kmity okolo
rovnovážnych polôh. Tuhé látky si zachovávajú objem a tvar, ktorý je možné zmeniť len
pôsobením pomerne veľkých síl.
Stavebné častice v kvapalných látkach sú usporiadané tiež tesne, ale môžu sa vzájomne
pomerne voľne pohybovať. Atómy, resp. molekuly, nie sú viazané na jedno miesto. Kvapaliny
sú málo stlačiteľné a nemajú tvarovú stálosť – nadobudnú vždy tvar nádoby,
v ktorej sú umiestnené. Ich voľný povrch je vždy kolmý na smer intenzity silového poľa,
v ktorom sa nachádzajú. Malá stlačiteľnosť kvapalín je dôsledkom toho, že molekuly v jej
povrchovej vrstve pôsobia na celú kvapalinu tlakom, ktorý nazývame molekulový alebo aj
kohézny tlak. Tento tlak je spôsobený tým, že molekuly v povrchovej vrstve majú iné okolie
ako molekuly nachádzajúce sa vnútri kvapaliny. Molekuly vnútri kvapaliny sú rovnomerne
obklopené inými molekulami kvapaliny, ale molekuly na
povrchu nie (obr. 5.1). V guli s polomerom r (polomer
molekulového pôsobenia) opísanej okolo molekuly A,
nachádza sa veľký počet molekúl. Príťažlivé sily, ktorými
tieto molekuly pôsobia na molekulu A, sa vplyvom
izotropného rozdelenia navzájom rušia a výsledná sila
pôsobiaca na molekulu A je rovná nule. Iná situácia je v
prípade molekuly B, ktorá sa nachádza na povrchu
kvapaliny. Ak je molekula od povrchu v menšej
vzdialenosti ako je polomer molekulového pôsobenia,
výsledná sila pôsobiaca na molekulu nie je nulová. Rušia
sa sily rovnobežné s povrchom, ale v smere kolmom na
povrch kvapaliny pôsobí výsledná sila smerujúca do jej
vnútra, pretože nad povrchom kvapaliny je menej molekúl
v guli molekulového pôsobenia ako pod povrchom. Na každú molekulu kvapaliny, ktorá sa
nachádza vo vrstve kvapaliny hrúbky r pod jej povrchom pôsobí teda výsledná sila s rovnakou
orientáciou, smerujúca dovnútra. Silové pôsobenie je tým väčšie, čím je molekula bližšie k
povrchu kvapaliny. Ak na kvapalinu nepôsobia nijaké iné sily, dosiahne sa rovnovážny stav
vtedy, keď povrch kvapaliny nadobudne taký tvar, pri ktorom v každom bode povrchu sú
kohézne sily kolmé na povrch kvapaliny. Ak je množstvo kvapaliny malé, kvapalina zaujme
tvar gule – vznikne kvapka. Pri väčších množstvách kvapaliny prevláda gravitačné pôsobenie
a výsledný tvar povrchu kvapaliny nie je guľový. Dokonca povrch vo väčšej nádobe sa stáva
rovinným s výnimkou oblasti dotyku povrchu kvapaliny so stenami nádoby.
Plyn je tvorený atómami alebo molekulami, ktoré sa nachádzajú ďaleko od seba a ktoré sa
voľne pohybujú cez celý objem látky. Pretože molekuly sú ďaleko od seba, interakcia medzi
nimi je veľmi slabá. Plynné látky nemajú ani tvarovú, ani objemovú stálosť. Vyplnia vždy
celý objem nádoby, v ktorej sú umiestnené a sú ľahko stlačiteľné.
Obr. 5.1. Sily pôsobiace na mole-
kulu nachádzajúcu sa vnútri kvapa-
liny (A) a na molekulu nachádza-
júcu sa v povrchovej vrstve (B).
A
B
r

159
Kvapaliny a plyny sa vyznačujú vlastnosťou, ktorú nazývame tekutosť. Preto tieto látky
nazývame spoločným názvom – tekutiny. Sú to látky, ktoré hrajú v našom každodennom
živote veľmi dôležitú úlohu. Dýchame vzduch, pijeme vodu, v našich cievach koluje
životodarná kvapalina – krv. Máme tekutú atmosféru, tekutý oceán a v strede Zeme máme
tekuté jadro. Podobne, ako v prípade tuhej látky, aj pri tekutinách si zavedieme predstavu
ideálnej tekutiny. Takáto ideálna tekutina je dokonale tekutá, na zmenu svojho tvaru
nepotrebuje žiadnu energiu. V tekutine nepôsobí napätie v šmyku. Ak by sme predsa na ňu
pôsobili šmykovým napätím, ktoré je spôsobené silami meniacimi jej tvar, dá sa do pohybu,
ktorý trvá tak dlho, kým šmykové napätie nevymizne.
V tejto kapitole sa budeme zaoberať prevažne kvapalinami, pri ktorých je ďalšou
charakteristikou ideálnosti nestlačiteľnosť. Zvykom je deliť mechaniku kvapalín na
hydrostatiku – zaoberá sa kvapalinami v pokoji a hydrodynamiku, ktorá skúma kvapaliny
z hľadiska ich pohybu.
5.2 Hydrostatika
Ako vyplýva z názvu tejto časti, budeme v nej skúmať problémy týkajúce sa kvapalín
v pokoji. Patria sem však aj také pohyby kvapaliny, pri ktorých ich hmotný stred zostáva
v pokoji. Základným problémom hydrostatiky je formulovanie zákonov rovnováhy kvapaliny
v rôznych potenciálových poliach.
O namáhaní v ťahu v kvapalinách nemá zmysel hovoriť – kvapaliny nekladú prakticky
žiadny odpor proti vzájomnému oddeleniu jednotlivých častí. V kvapalinách má zmysel
hovoriť len o tlaku. Tlak p je definovaný ako podiel sily pôsobiacej kolmo na danú plochu
a veľkosti S tejto plochy
S
Fp (5.1)
Jednotkou tlaku je )( Pa,1m 1N 1 2 pascalp .
Pomocou nasledujúcich úvah odvodíme základnú rovnicu hydrostatiky. Uvažujme určité
množstve ideálnej kvapaliny s objemom V (obr. 5.2), ktoré je časťou kvapaliny nachádzajúcej
sa v silovom poli. My budeme uvažovať kvapalinu
nachádzajúcu sa v gravitačnom poli, charakterizovanom
intenzitou K a potenciálom g . Na každý element povrchu
Sd tejto kvapaliny pôsobí zo strany okolitej kvapaliny tlaková
sila
SF dd pp
kde Sd je vektor uvažovaného plošného elementu. Na celú
uvažovanú plochu, ohraničujúcu vybrané množstvo kvapaliny,
pôsobí teda tlaková sila
S
p p SF d (5.2)
Ďalej, keďže každý element sa nachádza v gravitačnom
poli, pôsobí naň objemová sila
Obr. 5.2. Na časť kvapaliny
uzavretú v ploche S pôsobí
tlaková sila pF (spôsobená tla-
kom okolitej kvapaliny) a obje-
mová sila VF (napr. tiaž).
dS
dmdF
dFp
V
V
160
VVm gV d gradd d d KKF
kde ggradK , pozri vzťah (2.76). Celková objemová sila pôsobiaca na skúmané
množstvo kvapaliny je teda
V
V
gV d grad F (5.3)
Podľa vety o pohybe hmotného stredu sa výsledná sila pôsobiaca na skúmané množstvo
kvapaliny s hmotnosťou
V
Vm d (5.4)
rovná súčinu tejto hmotnosti a zrýchlenia a hmotného stredu tohto množstva
aFF mVp (5.5)
a po dosadení vzťahov (5.2), (5.3) a (5.4) tiež
VV
g VVp d d gradd aS
S
Podľa Gaussovej vety,
V
Vff d gradd
S
S , ktorá hovorí, že integrál skalárnej funkcie cez
uzavretú plochu sa rovná integrálu gradientu tejto funkcie cez objem nachádzajúci sa vnútri
plochy, možno prvý člen rovnice upraviť takto
Vpp
V
d gradd
S
S
Potom platí
VV
g
V
VVVp d d gradd grad a
a taktiež
a gp grad grad (5.6)
Avšak v hydrostatike zrýchlenie 0a . Potom
0grad grad gp (5.7)
Táto rovnica nemá vo všeobecnosti riešenie. Keď sa hustota v kvapaline mení, sily sa nijako
nemôžu vyrovnať a kvapalina sa nemôže nachádzať v stabilnom stave. V kvapaline začnú
tiecť konvekčné prúdy. Vidieť to aj z rovnice (5.7), v ktorej prvý člen je úplným gradientom,
kým druhý nie je, keď hustota je premenlivá. Iba keď je konštantná, je aj druhý člen úplným
gradientom. Vtedy rovnicu (5.7) možno prepísať takto
0 gpgrad
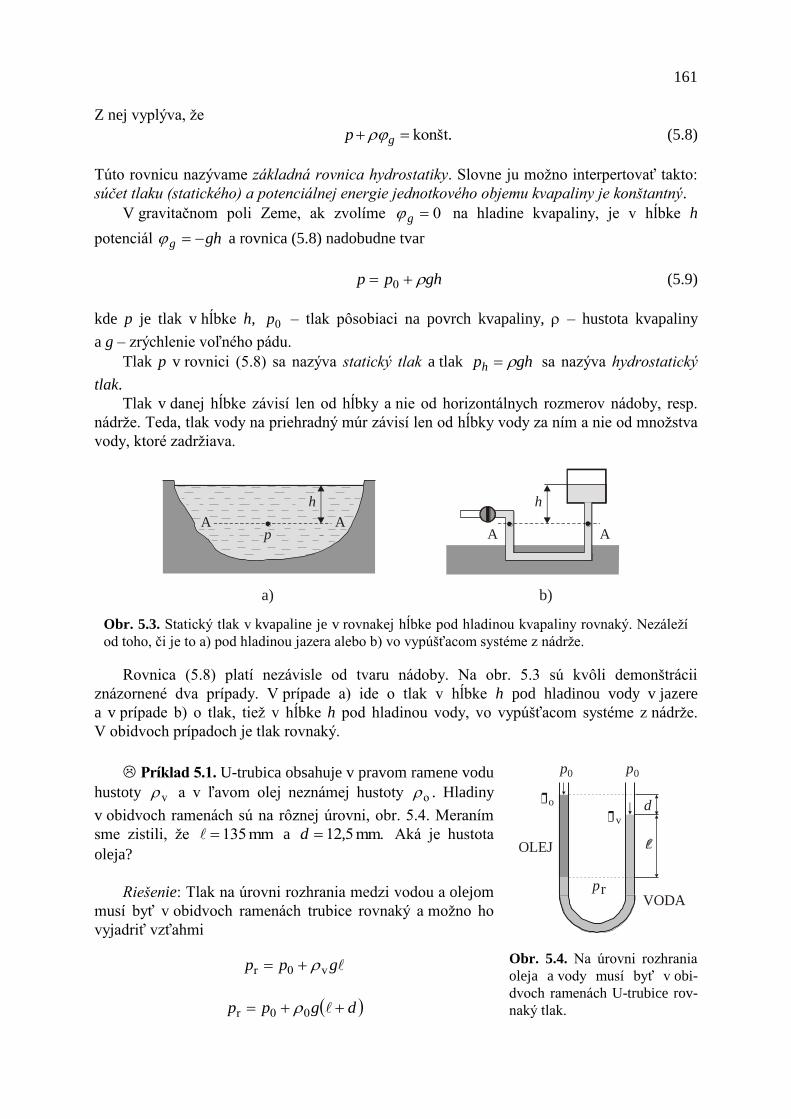
161
Z nej vyplýva, že
.p g konšt (5.8)
Túto rovnicu nazývame základná rovnica hydrostatiky. Slovne ju možno interpertovať takto:
súčet tlaku (statického) a potenciálnej energie jednotkového objemu kvapaliny je konštantný.
V gravitačnom poli Zeme, ak zvolíme 0g na hladine kvapaliny, je v hĺbke h
potenciál ghg a rovnica (5.8) nadobudne tvar
ghpp 0 (5.9)
kde p je tlak v hĺbke h, 0p – tlak pôsobiaci na povrch kvapaliny, – hustota kvapaliny
a g – zrýchlenie voľného pádu.
Tlak p v rovnici (5.8) sa nazýva statický tlak a tlak ghph sa nazýva hydrostatický
tlak.
Tlak v danej hĺbke závisí len od hĺbky a nie od horizontálnych rozmerov nádoby, resp.
nádrže. Teda, tlak vody na priehradný múr závisí len od hĺbky vody za ním a nie od množstva
vody, ktoré zadržiava.
Rovnica (5.8) platí nezávisle od tvaru nádoby. Na obr. 5.3 sú kvôli demonštrácii
znázornené dva prípady. V prípade a) ide o tlak v hĺbke h pod hladinou vody v jazere
a v prípade b) o tlak, tiež v hĺbke h pod hladinou vody, vo vypúšťacom systéme z nádrže.
V obidvoch prípadoch je tlak rovnaký.
Príklad 5.1. U-trubica obsahuje v pravom ramene vodu
hustoty v a v ľavom olej neznámej hustoty o . Hladiny
v obidvoch ramenách sú na rôznej úrovni, obr. 5.4. Meraním
sme zistili, že mm 135 a mm. 512,d Aká je hustota
oleja?
Riešenie: Tlak na úrovni rozhrania medzi vodou a olejom
musí byť v obidvoch ramenách trubice rovnaký a možno ho
vyjadriť vzťahmi
gpp v0r
dgpp 00r
Obr. 5.3. Statický tlak v kvapaline je v rovnakej hĺbke pod hladinou kvapaliny rovnaký. Nezáleží
od toho, či je to a) pod hladinou jazera alebo b) vo vypúšťacom systéme z nádrže.
Obr. 5.4. Na úrovni rozhrania
oleja a vody musí byť v obi-
dvoch ramenách U-trubice rov-
naký tlak.
AA
AA
h h
p
a) b)
p p
p
0 0
d
VODA
OLEJ
r
v
o
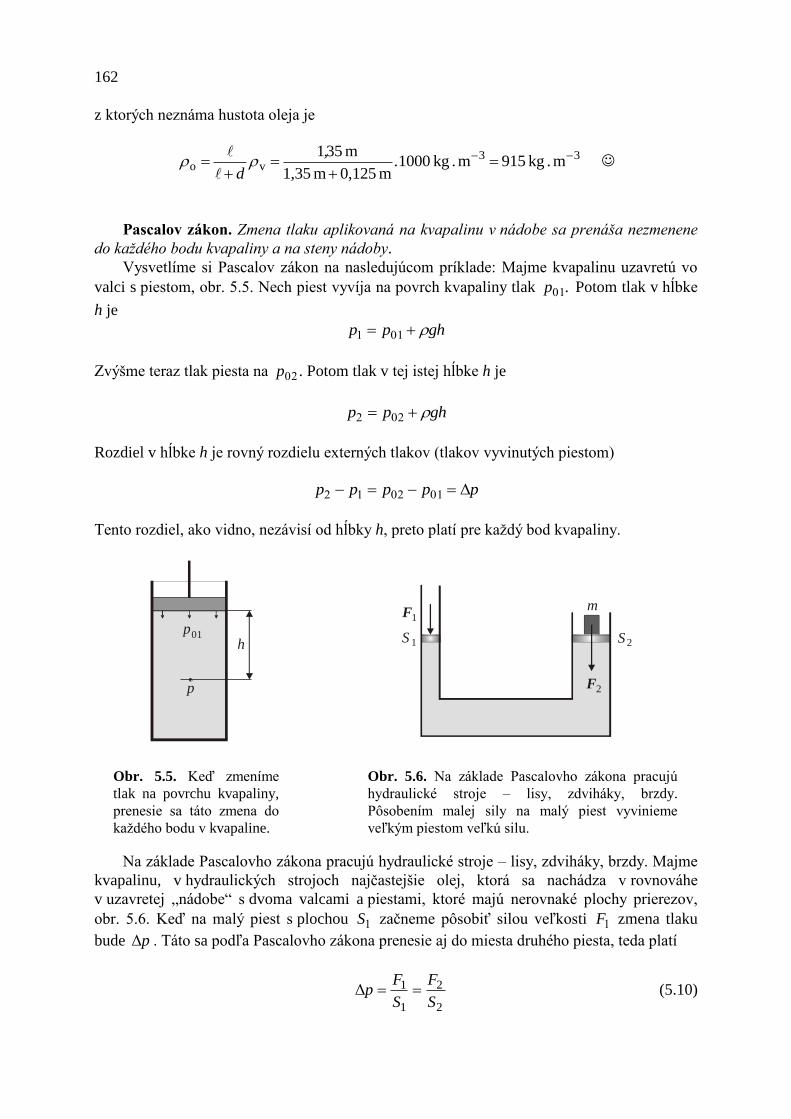
162
z ktorých neznáma hustota oleja je
33vo m . kg 915m . kg 1000
m 0,125m 1,35
m 351
.,
d
Pascalov zákon. Zmena tlaku aplikovaná na kvapalinu v nádobe sa prenáša nezmenene
do každého bodu kvapaliny a na steny nádoby.
Vysvetlíme si Pascalov zákon na nasledujúcom príklade: Majme kvapalinu uzavretú vo
valci s piestom, obr. 5.5. Nech piest vyvíja na povrch kvapaliny tlak .01p Potom tlak v hĺbke
h je
ghpp 011
Zvýšme teraz tlak piesta na 02p . Potom tlak v tej istej hĺbke h je
ghpp 022
Rozdiel v hĺbke h je rovný rozdielu externých tlakov (tlakov vyvinutých piestom)
ppppp Δ010212
Tento rozdiel, ako vidno, nezávisí od hĺbky h, preto platí pre každý bod kvapaliny.
Na základe Pascalovho zákona pracujú hydraulické stroje – lisy, zdviháky, brzdy. Majme
kvapalinu, v hydraulických strojoch najčastejšie olej, ktorá sa nachádza v rovnováhe
v uzavretej „nádobe“ s dvoma valcami a piestami, ktoré majú nerovnaké plochy prierezov,
obr. 5.6. Keď na malý piest s plochou 1S začneme pôsobiť silou veľkosti 1F zmena tlaku
bude pΔ . Táto sa podľa Pascalovho zákona prenesie aj do miesta druhého piesta, teda platí
2
2
1
1ΔS
F
S
Fp (5.10)
Obr. 5.5. Keď zmeníme
tlak na povrchu kvapaliny,
prenesie sa táto zmena do
každého bodu v kvapaline.
Obr. 5.6. Na základe Pascalovho zákona pracujú
hydraulické stroje – lisy, zdviháky, brzdy.
Pôsobením malej sily na malý piest vyvinieme
veľkým piestom veľkú silu.
p
p
01h S S1
1
2
2F
Fm

163
2S je plocha druhého piesta a 2F je veľkosť sily, ktorou musíme držať (alebo, ktorú vyvíja)
druhý piest – je schopný udržať bremeno s tiažou 2FmgFg .
Poznámka k Pascalovmu zákonu. Pascalov zákon sa často formuluje takto: Tlak
v kvapaline sa šíri všetkými smermi rovnako a jeho matematické vyjadrenie je
konšt0 pp . (5.11)
Skutočne, keď je kvapalina pod takým externým tlakom 0p , že možno hydrostatický tlak
ghph zanedbať, dostaneme zo základnej rovnice hydrostatiky vzťah (5.10).
Príklad 5.2. Plocha piesta spojeného s nožným pedálom hydraulickej brzdy je .2cm 5
Brzdový valec má plochu .2cm 75 Akou silou musíme tlačiť nohou, aby brzda vyvinula silu
N? 1500 O akú vzdialenosť sa posunie piest v brzdovom valci, ak piest spojený s pedálom sa
posunie o cm? 8
Riešenie: Na riešenie tejto úlohy použijeme Pascalov zákon. Tlak, ktorý vyvinie piest
brzdy je
1
11
S
Fp
Taký istý tlak pôsobí na piest v brzdovom valci. Platí teda vzťah
2
2
1
11
S
F
S
Fp
z ktorého dostaneme silu, ktorou musíme tlačiť nohou na brzdový pedál
N 100N 1500cm 75
cm 52
2
22
11 .F
S
SF
Posunutie 2s piesta v brzdovom valci vypočítame z rovnosti prác, ktoré vykonajú sily
21 a FF
2211 sFsF
Potom hľadané posunutie piesta v brzdovom valci je
mm 5,33m 5,33.10m 108N 1500
N 100 321
2
12 ..s
F
Fs
Archimedov zákon. Teleso ponorené do tekutiny (kvapaliny, plynu) je nadľahčované
silou, ktorá sa rovná tiaži ním vytlačenej tekutiny. Jeho matematická formulácia je
nasledujúca
gVF vz (5.12)

164
kde je hustota tekutiny, g – zrýchlenie voľného pádu a V – objem tekutiny vytlačenej
telesom (rovný objemu telesa ponoreného v tekutine). Silu vzF nazývame vztlakovou silou.
Ukážeme si, že tento zákon je tiež len dôsledkom
základnej rovnice hydrostatiky. Uvažujme teleso tvaru
hranola (kúska dosky) s plochou podstavy S a hrúbkou ,hΔ
ponorené v kvapaline tak, ako je znázornené na obr. 5.7.
Tlak v mieste hornej strany dosky označme ako 1p a tlak
v mieste dolnej strany ako 2p . Silu pôsobiacu na hornú
stranu dosky možno vyjadriť takto
SghpSpF 011
a silu pôsobiacu na dolnú stranu ako
ShhgpSpF Δ022
Výsledná sila pôsobiaca na dosku v zvislom smere nahor, keďže 12 FF , je
gVhSgSghpShhgpFFF ΔΔ 0012vz
kde hSV Δ je objem telesa (dosky). Výsledná sila pôsobiaca na dosku vo vodorovnom
smere je rovná nule, lebo každá elementárna plôška na jednej bočnej strane má na opačnej
strane proťajšok, na ktorý pôsobí rovnako veľká sila ako na túto plôšku ale opačne
orientovaná. Týmto sme dokázali tvrdenie Archimedovho zákona, vzťah (5.11).
Príklad 5.3. Hovorí sa, že len malá časť ľadovca plávajúceho v mori vyčnieva nad
hladinu. Koľko percent je to z celého ľadovca? Hustota ľadu je 3m . kg 917 a hustota
morskej vody 3m . kg 1024 .
Riešenie: Označíme objem ľadovca ako V
a objem jeho ponorenej časti ako vV , obr. 5.8. Pre
plávajúci ľadovec platí rovnosť tiaže ľadovca
a vztlakovej sily pôsobiacej naň
gVgV vv
Z tejto rovnice vyjadríme objem ponorenej časti
VVv
v
Objem časti ľadovca, ktorý vyčnieva nad vodu je daný rozdielom objemu celého ľadovca
a časti ponorenej pod vodu, vVV . Vyčnievajúca časť ľadovca v percentách je daná
podielom objemu vyčnievajúcej časti a objemu celého ľadovca vynásobenému 100 %
% 10,4% 100m . kg 1024
m . kg 9171% 1001% 1001% 100
3
3
v
vv
...V
V.
V
VV
Obr. 5.7. Na teleso ponorené do
kvapaliny pôsobí vztlaková sila.
Obr. 5.8. Iba malá časť ľadovca vyčnieva
nad hladinu.
p
p
p
1 1
22
0
h
h
SF
F
l
v
vV
F
F
vz
g

165
Plávanie. Nahraďme vybraný objem kvapaliny (budeme uvažovať vodu) telesom, ktoré
má takú istú hustotu ako voda, t . V tomto prípade je vztlaková sila rovná tiaži telesa –
hovoríme, že teleso sa vznáša vo vode, obr. 5.8a. Je v rovnovážnom stave s vodou v každom
mieste.
Ak tento objem nahradíme telesom s väčšou hustotou ako je hustota vody, t , napr.
kameňom, tiaž telesa je väčšia ako vztlaková sila a teleso padá ku dnu, obr. 5.8b.
Keď nahradíme vybraný objem vody telesom s menšou hustotou ako má voda, t ,
vztlaková sila je väčšia ako tiaž telesa a ponorené teleso stúpa vo vode smerom nahor, vynára
sa z vody, čím vztlaková sila klesá, až do okamihu, keď jej hodnota je rovná tiaži telesa –
teleso pláva na hladine, obr. 5.8c, d.
Rovnováha plávajúcich objektov. Iste ste už v televízii alebo nejakom filme videli, že
plávajúca loď alebo ľadovec sa môže prevrátiť. Čo musí byť splnené aby sa to nestalo? Na
plávajúci objekt na povrchu vody (kvapaliny) účinkujú v tej istej priamke (v osi plávania) dve
sily, ktoré majú rovnaké veľkosti ale opačné smery: tiaž objektu, ktorej pôsobiskom je hmotný
stred objektu a vztlaková sila, ktorej pôsobiskom je hmotný stred vody nahradenej objektom.
O stabilite plávania rozhoduje poloha bodu C, ktorý sa nazýva metacentrom. Je to priesečník
priamky, v ktorej pôsobí vztlaková sila a osi plávania po jej vychýlení zo zvislej polohy, teda
pri naklonení, napr. lode (obr. 5.9). Podmienkou stability plávania je to, aby sa metacentrum
nachádzalo nad hmotným stredom plávajúcej lode. Vtedy totiž momenty vztlakovej sily
Obr. 5.8. a) Teleso sa vznáša vo vode, keď t . b) Teleso padá ku dnu, keď t . c) Pono-
rené teleso stúpa ku hladine, keď t . d) Teleso pláva na vode, keď t a teleso nie je celé
ponorené. Vtedy mgF vz .
Obr. 5.9. Keď sa metacentrum (bod
C) nachádza nad hmotným stredom
plávajúcej lode, je loď stabilná.
Obr. 5.10. Hydrostatický
tlak stĺpca ortuti sa rovná
atmosférickému tlaku.
Fvz
mg
C
T Tvz
a) b) c) d)
F F F
F
vz vz vz
vz
mgmg
mg
mg
tt t
t
t t
t
t
h
pa
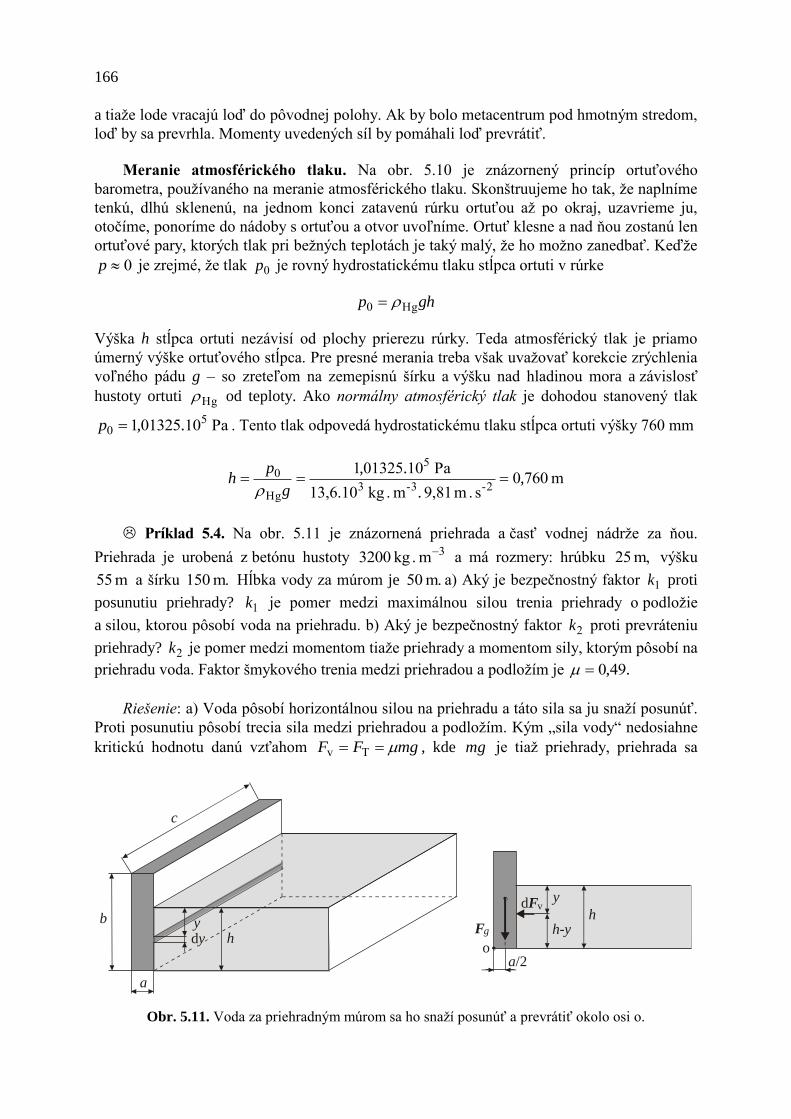
166
a tiaže lode vracajú loď do pôvodnej polohy. Ak by bolo metacentrum pod hmotným stredom,
loď by sa prevrhla. Momenty uvedených síl by pomáhali loď prevrátiť.
Meranie atmosférického tlaku. Na obr. 5.10 je znázornený princíp ortuťového
barometra, používaného na meranie atmosférického tlaku. Skonštruujeme ho tak, že naplníme
tenkú, dlhú sklenenú, na jednom konci zatavenú rúrku ortuťou až po okraj, uzavrieme ju,
otočíme, ponoríme do nádoby s ortuťou a otvor uvoľníme. Ortuť klesne a nad ňou zostanú len
ortuťové pary, ktorých tlak pri bežných teplotách je taký malý, že ho možno zanedbať. Keďže
0p je zrejmé, že tlak 0p je rovný hydrostatickému tlaku stĺpca ortuti v rúrke
ghp Hg0
Výška h stĺpca ortuti nezávisí od plochy prierezu rúrky. Teda atmosférický tlak je priamo
úmerný výške ortuťového stĺpca. Pre presné merania treba však uvažovať korekcie zrýchlenia
voľného pádu g – so zreteľom na zemepisnú šírku a výšku nad hladinou mora a závislosť
hustoty ortuti Hg od teploty. Ako normálny atmosférický tlak je dohodou stanovený tlak
Pa10013251 50 .,p . Tento tlak odpovedá hydrostatickému tlaku stĺpca ortuti výšky 760 mm
m 7600s . m 9,81 m . kg 13,6.10
Pa100132512-3-3
5
Hg
0 ,.
.,
g
ph
Príklad 5.4. Na obr. 5.11 je znázornená priehrada a časť vodnej nádrže za ňou.
Priehrada je urobená z betónu hustoty 3m . kg 3200 a má rozmery: hrúbku m, 25 výšku
m 55 a šírku m. 150 Hĺbka vody za múrom je m. 50 a) Aký je bezpečnostný faktor 1k proti
posunutiu priehrady? 1k je pomer medzi maximálnou silou trenia priehrady o podložie
a silou, ktorou pôsobí voda na priehradu. b) Aký je bezpečnostný faktor 2k proti prevráteniu
priehrady? 2k je pomer medzi momentom tiaže priehrady a momentom sily, ktorým pôsobí na
priehradu voda. Faktor šmykového trenia medzi priehradou a podložím je .,490
Riešenie: a) Voda pôsobí horizontálnou silou na priehradu a táto sila sa ju snaží posunúť.
Proti posunutiu pôsobí trecia sila medzi priehradou a podložím. Kým „sila vody“ nedosiahne
kritickú hodnotu danú vzťahom mgFF Tv , kde mg je tiaž priehrady, priehrada sa
Obr. 5.11. Voda za priehradným múrom sa ho snaží posunúť a prevrátiť okolo osi o.
a
a/2
b
c
h
hy
y
dyh-y
dF
F
v
g
o

167
nebude posúvať. Aby sme mohli vypočítať bezpečnostný faktor 1k , potrebujeme vypočítať
„silu vody“ a treciu silu.
Elementárna sila vdF , ktorou pôsobí voda na plôšku Sd priehradného múra je
ygycSpF d d d v
kde gyp je tlak vody v hĺbke y, kde sa nachádza plôška .ycS dd Potom výsledná sila
pôsobiaca na priehradný múr je
2
0
v2
1d gchygcyF
h
Trecia sila medzi priehradným múrom a podložím sa vypočíta podľa známeho vzťahu
abcgVgmgF bbT
Bezpečnostný faktor 1k proti posunutiu priehrady je potom
721m .50 m . kg 1000
m 55 . m .25 m . kg 3200 . 0,49 22223
3
2b
2
21
b
v
T1 ,
.
h
ab
gch
abcg
F
Fk
b) Voda sa snaží tiež otočiť múr okolo osi o. Moment tiaže priehrady pôsobí proti. Ak
chceme vypočítať bezpečnostný faktor proti prevrhnutiu, musíme teda najprv poznať moment
tiaže múra a moment sily, ktorým pôsobí voda na múr. Obidva momenty počítame vzhľadom
na os o. Moment tiaže je
bcgamga
M g2
b2
1
2
Pri určovaní „momentu sily vody“ najprv určíme elementárny moment sily, ktorým
pôsobí voda na múr. V mieste y pod hladinou pôsobí na múr elementárna sila vdF . Táto
pôsobí vzhľadom na os o momentom sily, ktorý možno vyjadriť takto
ygcyyhFyhM d d d vv
Výsledný moment sily, ktorým pôsobí voda na múr dostaneme integráciou
333
0 0
2
0
v6
1
3
1
2
1dd d gchgchgchygcyygchyygcyyhM
h hh
Bezpečnostný faktor 2k proti prevráteniu priehrady je
642m 50 . m . kg 1000
m 55 . m 25 . m . kg 3200 33333
223
3
2b
3
61
2b2
1
v2 ,
.
h
ba
gch
bcga
M
Mk
g
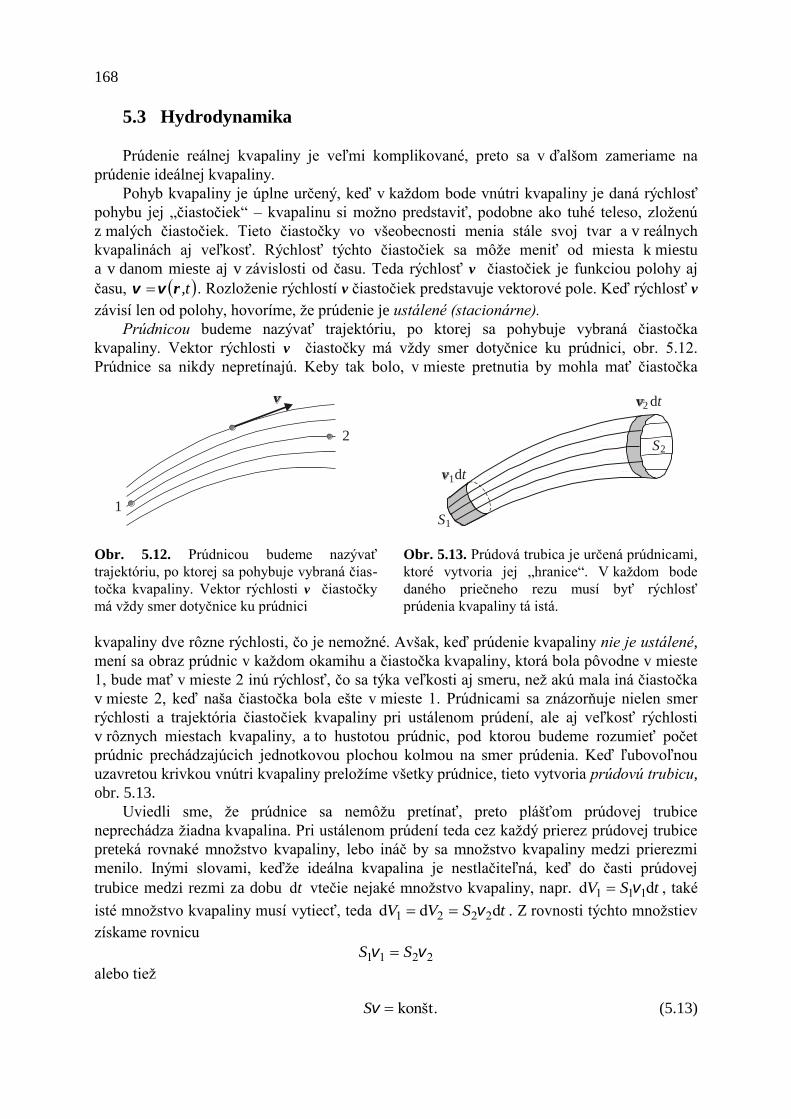
168
5.3 Hydrodynamika
Prúdenie reálnej kvapaliny je veľmi komplikované, preto sa v ďalšom zameriame na
prúdenie ideálnej kvapaliny.
Pohyb kvapaliny je úplne určený, keď v každom bode vnútri kvapaliny je daná rýchlosť
pohybu jej „čiastočiek“ – kvapalinu si možno predstaviť, podobne ako tuhé teleso, zloženú
z malých čiastočiek. Tieto čiastočky vo všeobecnosti menia stále svoj tvar a v reálnych
kvapalinách aj veľkosť. Rýchlosť týchto čiastočiek sa môže meniť od miesta k miestu
a v danom mieste aj v závislosti od času. Teda rýchlosť v čiastočiek je funkciou polohy aj
času, t,rvv . Rozloženie rýchlostí v čiastočiek predstavuje vektorové pole. Keď rýchlosť v
závisí len od polohy, hovoríme, že prúdenie je ustálené (stacionárne).
Prúdnicou budeme nazývať trajektóriu, po ktorej sa pohybuje vybraná čiastočka
kvapaliny. Vektor rýchlosti v čiastočky má vždy smer dotyčnice ku prúdnici, obr. 5.12.
Prúdnice sa nikdy nepretínajú. Keby tak bolo, v mieste pretnutia by mohla mať čiastočka
kvapaliny dve rôzne rýchlosti, čo je nemožné. Avšak, keď prúdenie kvapaliny nie je ustálené,
mení sa obraz prúdnic v každom okamihu a čiastočka kvapaliny, ktorá bola pôvodne v mieste
1, bude mať v mieste 2 inú rýchlosť, čo sa týka veľkosti aj smeru, než akú mala iná čiastočka
v mieste 2, keď naša čiastočka bola ešte v mieste 1. Prúdnicami sa znázorňuje nielen smer
rýchlosti a trajektória čiastočiek kvapaliny pri ustálenom prúdení, ale aj veľkosť rýchlosti
v rôznych miestach kvapaliny, a to hustotou prúdnic, pod ktorou budeme rozumieť počet
prúdnic prechádzajúcich jednotkovou plochou kolmou na smer prúdenia. Keď ľubovoľnou
uzavretou krivkou vnútri kvapaliny preložíme všetky prúdnice, tieto vytvoria prúdovú trubicu,
obr. 5.13.
Uviedli sme, že prúdnice sa nemôžu pretínať, preto plášťom prúdovej trubice
neprechádza žiadna kvapalina. Pri ustálenom prúdení teda cez každý prierez prúdovej trubice
preteká rovnaké množstvo kvapaliny, lebo ináč by sa množstvo kvapaliny medzi prierezmi
menilo. Inými slovami, keďže ideálna kvapalina je nestlačiteľná, keď do časti prúdovej
trubice medzi rezmi za dobu td vtečie nejaké množstvo kvapaliny, napr. tSV dd 111 v , také
isté množstvo kvapaliny musí vytiecť, teda tSVV ddd 2221 v . Z rovnosti týchto množstiev
získame rovnicu
2211 vv SS
alebo tiež
konšt.vS (5.13)
Obr. 5.12. Prúdnicou budeme nazývať
trajektóriu, po ktorej sa pohybuje vybraná čias-
točka kvapaliny. Vektor rýchlosti v čiastočky
má vždy smer dotyčnice ku prúdnici
Obr. 5.13. Prúdová trubica je určená prúdnicami,
ktoré vytvoria jej „hranice“. V každom bode
daného priečneho rezu musí byť rýchlosť
prúdenia kvapaliny tá istá.
1
2
2
dt
dt
S
1
1
2S

169
ktorú nazývame rovnica spojitosti (kontinuity). Ako sme videli, táto rovnica je dôsledkom
nestlačiteľnosti kvapaliny. Súčin vS má jednotku sm3 , čo značí objem kvapaliny, ktorý
pretečie plochou S za jednu sekundu. Túto veličinu nazývame objemový tok, alebo aj prietok
a značíme ju písmenom ,VQ teda vSQV .
Príklad 5.5. Priečnym prierezom potrubia s priemerom 2,5 cm pretečie za 30 minút 200 l vody. Aká je rýchlosť prúdenia vody v potrubí?
Riešenie: Množstvo vody V (objem), ktoré pretečie za dobu t cez prierez potrubia je dané
vzťahom
tStQV V v (P1)
kde vSQV je objemový tok. Zo vzťahu (P1), keď dosadíme 4π 2dS , kde d je
priemer potrubia, hľadaná rýchlosť prúdenia vody je
1
32 2
33
2s . m 2260
s 10 . 1,8 m 10 . 2,5 . π
m 200.10 . 4
π
4
,
.td
V
St
Vv
V ďalšom si odvodíme základné rovnice, ktoré opisujú taký pohyb ideálnej kvapaliny, pri
ktorom aj hmotný stred mení svoju polohu. Východiskom bude základná pohybová rovnica
(5.6) odvodená v časti 5.2, teda rovnica
a gp grad grad
Kvôli ďalšej úprave pohybovej rovnice potrebujeme nájsť vyjadrenie zrýchlenia a čiastočky
kvapaliny. Predstavme si, že zafarbíme malú čiastočku kvapaliny. Jej rýchlosť v mieste
zyx ,, v čase t je tzyx , , ,v , je teda funkciou polohy a času. Za malý časový interval td sa
táto čiastočka presunie do bodu zzyyxx d d d ,, a jej rýchlosť bude
ttzzyyxx d d d d ,,,v a možno ju vyjadriť takto
t
tz
zy
yx
xtzyxttzzyyxx dddd d d d d
vvvvvv ,,,,,,
tt
tz
ty
tx
t,z,y,x zyx dddd
vvvvv vvv
Zmena rýchlosti vd je teda
tt
tz
ty
tx
tzyxttzzyyxx zyx dddd d d d dd
vvvvvvv vvv,,,,,,
Zrýchlenie a je potom
tttzyxdtzyx
vvv
vvv
vvvvvgrad
dvvva

170
Po dosadení zrýchlenia a do pohybovej rovnice dostaneme
pt
g grad1
gradgrad
vv
v (5.14)
Táto rovnica sa nazýva Eulerova rovnica. Opisuje pohyb kvapaliny, pri ktorom môžu vznikať
vo všeobecnosti aj víry. V tomto prípade je problém veľmi zložitý.
Matematická poznámka: Ukážeme si ako sa počíta prírastok funkcie, napr. xfy , ktorej graf je na
obr. 5.14. Podľa definície derivácie (
x
y
x
xfxf
xx Δ
Δ lim
Δ
Δ lim
0 0
) je podiel
x
y
Δ
Δ dobrou aproximáciou
derivácie f x , keď x Δ je malé. Možno potom písať
malé"" je Δ Δ
Δxxf
x
y
Z tejto rovnice vyplýva
malé"" je Δ Δ Δ xxxfy
Výraz xxf Δ sa nazýva diferenciál funkcie xf a
označujeme ho yxf d alebo d
xxfxf Δ d
Diferenciál teda predstavuje zmenu funkcie xf „pozdĺž“
dotyčnice ku grafu funkcie (obr. 5.x). Podľa posledného vzťahu
napríklad diferenciály funkcií 4xxf a xxf sú
xxx
xxx
ΔΔ 1d
Δ 4d 34
Všimnime si, že xx Δd . Z tohto dôvodu môžeme
namiesto x Δ písať xd . Potom diferenciál (malý prírastok)
funkcie xf možno vyjadriť ako
xx
xfxfxxfxf d
d
dd alebo d d
V prípade vektorovej funkcie viac premenných, napr. tzyx ,,,f potom diferenciál (prírastok) tejto
funkcie je tt
zz
yy
xx
ddddd
fffff .
Z Eulerovej rovnice sa pre nevírové, ustálené prúdenie kvapaliny dá odvodiť
jednoduchšia rovnica, ktorá sa nazýva Bernoulliho rovnica. My zvolíme kvôli jednoduchšej
matematike iný postup: Uvažujme ustálené prúdenie kvapaliny a prúdovú trubicu podľa obr.
5.15 Ďalej budeme si všímať kvapalinu uzavretú v objeme medzi plochami 1S a .2S
Čiastočky kvapaliny, ktoré vchádzajú do tohto objemu cez plochu 1S , za časový interval td
dosiahnu plochu 1S vo vzdialenosti ts dd 11 v od plochy 1S . Za tú istú dobu čiastočky
kvapaliny, ktoré vytekajú z objemu cez plochu 2S dosiahnu plochu 2S vo vzdialenosti
ts dd 22 v . Pozornosť budeme venovať len tieňovaným objemom, lebo objem medzi 1S a
2S zostane nezmenený. Tieto dva objemy sú rovnaké, čo vyplýva z nestlačiteľnosti kvapaliny.
Obr. 5.14. K zavedeniu diferenciálu funkcie.
y
xx
x
x x+
f
df
DOTYČNICA
GRAF ( )f x
P

171
Označíme sily pôsobiace na plochy 1S a 2S ako 1F a 2F . Tieto sily sú tlakové sily, sú
výsledkom tlaku pôsobiaceho v kvapaline. Pri prúdení kvapaliny tieto sily konajú prácu. Sila
1F je sila, ktorou pôsobí kvapalina nachádzajúca sa vľavo od plochy 1S na nami uvažovanú
kvapalinu. Túto silu možno nazvať
hnacia sila. Táto vykoná prácu
11dsF . V priereze s plochou 2S
pôsobí však proti posunutiu nami
uvažovanej kvapaliny sila 2F a teda
„naša“ kvapalina vykoná prácu
22dsF – prácu potrebnú na
posunutie kvapaliny nachádzajúcej
sa vpravo od plochy 2S . Teda
výsledná práca vykonaná silami 1F
a 2F na kvapaline uzavretej medzi
1S a 2S je daná rozdielom ich prác
2211 ddd sFsFW
Nech 1p je tlak v kvapaline v priereze s plochou 1S a 2p tlak v priereze s plochou 2S .
Potom 111 SpF a 222 SpF a výsledná práca je
tSptSpsSpsSpW ddddd 222111222111 vv
Avšak, ako bolo už skôr konštatované, VtStS ddd 2211 vv , čo vyplýva z rovnice spojitosti
2211 vv SS . Potom
VppW d d 21 (5.15)
Práca síl 1F a 2F zmení celkovú energiu elementárneho objemu .Vd Celková energia
pozostáva z dvoch častí – kinetickej a potenciálnej. Kinetická energia sa zmení takto
1k2kk ddd EEE
a podobne aj potenciálna
1p2pp ddd EEE
Energie k2dE a p2dE sú kinetická a potenciálna energia elementárneho množstva kvapaliny
s hmotnosťou Vm dd v priereze s plochou 2S a k1dE a p1dE v priereze s plochou 1S .
Tieto energie možno vyjadriť známymi vzťahmi z mechaniky. Po uvedených vysvetleniach
možno písať
pk ddd EEW
po dosadení
1221
2221 ddd
2
1d
2
1d mghmghmmVpp vv
a po vydelení rovnice objemom Vd a krátkej úprave dostaneme
Obr. 5.15. Pre ustálené, nevírové prúdenie kvapaliny sa dá
odvodiť rovnica, ktorá sa nazýva Bernoulliho rovnica.
S
S S
S1
1 1
1
1
1
2
2
2
2 2
2
h
h
´
´d = ds tv
d = ds tv
p
p

172
222211
21
2
1
2
1pghpgh vv (5.16)
Táto rovnica hovorí o rovnosti dvoch veličín v dvoch rôznych bodoch pozdĺž prúdnice, čo
možno zovšeobecniť takto
.pgh konšt2
1 2v (5.17)
Rovnica (5.16) i (5.17) sa nazýva Bernoulliho rovnica a vyjadruje zákon zachovania energie
v kvapaline. Prvý člen v rovnici (5.17) predstavuje kinetickú energiu objemovej jednotky
kvapaliny, druhý člen je potenciálna energia objemovej jednotky a tretí, tlak, možno chápať aj
ako potenciálnu tlakovú energiu jednotkového objemu ( 332 mJ 1mN.m 1mN 1 Pa1 ).
V mieste, kde je kvapalina v pokoji, ako vyplýva z rovnice (5.17), je tlak
ghp konšt (5.18)
Tento tlak nazývame statický tlak. Tlak v rovnakej výške h (h je kladné, ak „ideme“ smerom
nahor od zvolenej nulovej úrovne a je záporné, keď ideme dole), keď tam kvapalina prúdi
rýchlosťou v je
2d
2
1konšt v ghp
Tento tlak nazývame dynamický. Vidíme, že pri rovnakom h, tam, kde kvapalina (alebo aj
plyn) prúdi väčšou rýchlosťou je tlak nižší.
Príklad 5.6. Vodorovné potrubie je zhotovené z rúr nerovnakého priemeru (5 cm
a 2,5 cm). a) Akou rýchlosťou prúdi voda v užšej rúre, keď rozdiel tlakov v širšej a užšej rúre
je 5 kPa? b) Za akú dobu naplníme týmto potrubím nádrž s objemom 1000 l ?
Riešenie: Na riešenie použijeme Bernoulliho rovnicu, ktorá pre vodorovné potrubie má
tvar
2221
21
2
1
2
1pp vv (P1)
a rovnicu spojitosti
2211 vv SS (P2)
V týchto rovniciach 111 , Sp ,v sú rýchlosť prúdenia vody, tlak a plocha priečneho rezu širšej
rúry a 222 , Sp ,v sú rovnaké veličiny platné pre užšiu rúru.
Keď z rovnice (P1) vyjadríme rozdiel tlakov
21
2221
2
1Δ vv ppp (P3)
a z rovnice (P2) rýchlosť 1v a dosadíme ju do rovnice (P3) dostaneme vzťah
21
22
212
22
1Δ
S
SSp
v

173
Z tohoto vzťahu po dosadení za 4π 211 dS a za 4π 2
22 dS dostaneme vzťah pre výpočet
rýchlosti prúdenia vody v užšej časti potrubia
1
4 24 233
34 2
42
41
41
2 s . m 273
m 1052m 5.10 m . kg 1.10
Pa 10 . 5 m 5.10 . 2
)
Δ2
,
.,.
.
dd(
pd
v
Množstvo vody (objem), ktoré musíme dodať do nádrže možno vyjadriť vzťahom
tSV 22v . Z neho doba, za ktorú naplníme nádrž je
min 10,4s 623
s . m 3,27 m 10 . 2,5 . π
m 1 . 4
π
4
12 2
3
22222
.d
V
S
Vt
vv
V nasledujúcom texte uvedieme niektoré aplikácie Bernoulliho rovnice.
Rýchlosť vytekania kvapaliny z nádrže cez malý otvor. Majme nádrž s kvapalinou
s malým otvorom v bočnej stene v hĺbke 21 hhh pod hladinou kvapaliny, obr. 5.16
Položme 0h a teda aj ,0g na dne nádrže. Bernoulliho rovnica napísaná pre miesto
A – hladinu kvapaliny a pre miesto B – výtokový otvor má tvar
022
0120
2
1
2
1pghpgh vv
Význam symbolov použitých v rovnici je zrejmý z obr. 5.16 Rovnicu upravíme takto
2120
2
2
1hhg vv (5.19)
Z rovnice spojitosti vv SS 00 však vyplýva, že 00 SSvv a potom
2
20
220 vv
S
S (5.20)
Po dosadení vzťahu (5.20) do rovnice (5.19) dostaneme
212
20
22
2
1hhg
S
S
vv
Predpokladali sme, že otvor je malý, plocha S jeho prierezu je
oveľa menšia ako plocha 0S povrchu kvapaliny v nádrži. Teda,
člen 220
22 vv SS a možno ho so zreteľom na 2v zanedbať. Napokon pre výtokovú
rýchlosť kvapaliny z otvoru dostaneme vzťah
ghhhg 22 21 v (5.21)
Obr. 5.16. Výtok kvapaliny
z nádrže cez malý otvor.
A
Bp
p ,
0
0 00S
S,h
h
1
2

174
Príklad 5.7. V dne valcovitej nádoby je kruhový otvor s priemerom 1 cm. Priemer nádoby
je 0,5 m. Aká je závislosť rýchlosti 0v , ktorou klesá hladina vody v nádobe od jej výšky h nad
dnom? Aká je táto rýchlosť pre cm? 20h Vodu považujte za ideálnu kvapalinu.
Riešenie: Na riešenie použijeme Bernoulliho rovnicu
220
2
1
2
1vv ghρ
kde je hustota vody, 0v – rýchlosť poklesu hladiny vody v nádobe, h – výška hladiny vody
nad dnom nádoby a v – výtoková rýchlosť vody cez otvor, a rovnicu spojitosti
vv SS 00
kde 0S je plocha prierezu nádoby (plocha hladiny vody) a S – plocha otvoru.
Riešením uvedených rovníc z hľadiska 0v a dosadením za 4π 20 DS a za 4π 2dS ,
kde D je priemer nádoby a d – priemer výtokového otvoru, dostaneme
44
2
0
2
dD
ghd
v
Keď si uvedomíme, že 44 dD , môžeme 4d vzhľadom na 4D zanedbať a vzťah pre
rýchlosť poklesu hladiny vody v nádobe sa zjednoduší
ghD
d2
2
0
v
Číselná hodnota pre cm 20h
1142
2
1
2
0 s . mm 7920s . m 10927m 0,2 s . m 8192 .m 5.10
m 101
,.,.,.
.v
Pitotova trubica. Slúži na meranie rýchlosti prúdenia kvapaliny v potrubí. Vložme do
vodorovného potrubia, ktorým prúdi kvapalina rýchlosťou v, v dostatočne veľkej vzájomnej
vzdialenosti dve rúrky majúce tvar ako je znázornené na obr. 5.17 Podľa Bernoulliho rovnice
je súčet tlaku a kinetickej energie objemovej jednotky
kvapaliny v bodoch 1 a 2 rovnako veľký. Teda platí
2221
21
2
1
2
1pp vv
Avšak rýchlosť 1v v priereze dopredu ohnutého konca
Pitotovej trubice sa rovná nule a rýchlosť 2v v bode 2
(v ústi druhej trubice) sa rovná rýchlosti prúdenia
kvapaliny v. Potom
Obr. 5.17. Pitotova trubica.
h
h
1
1
2
2

175
21212
2
1ghghpp v
Rýchlosť prúdenia kvapaliny v potrubí je
212 hhg v
Venturiho merač rýchlosti prúdenia. Princíp je znázornený na obr. 5.18 Do potrubia,
v ktorom chceme zmerať rýchlosť v prúdenia kvapaliny, vložíme diel, ktorého priemer sa
zužuje a potom rozširuje na pôvodnú hodnotu. Ako vyplýva z Bernoulliho rovnice, v mieste 1
s plochou priečneho rezu S, je rýchlosť prúdenia kvapaliny menšia ako v mieste 2 (plocha
priečneho rezu S ), teda vv a naopak tlak v mieste 1 je väčší ako v mieste 2, pp .
Z Bernoulliho rovnice
pp 2vv 2
1
2
1 2
a z rovnice spojitosti
vv SS
možno ľahko odvodiť pre rýchlosť v prúdenia
kvapaliny vzťah
22
22
SS
ppS
v
Rozdiel tlakov ghpp zistíme z rozdielu hladín v pripojenom manometri.
5.4 Dynamické účinky prúdiacej kvapaliny
Dynamické účinky kvapaliny (ale aj plynu, napr. vzduchu) vznikajú všade tam, kde tok
kvapaliny mení rýchlosť. Pri prúdení kvapaliny zahnutou rúrou podľa obr. 5.19 vzniká medzi
vstupným a výstupným prierezom zmena prietokovej rýchlosti 12Δ vvv . Hmotnostný
element md kvapaliny zmení pritom hybnosť. Táto zmena hybnosti je
12 dd vv mp
Na zmenu hybnosti hmotnostného elementu kvapaliny je potrebné, aby mu rúra udelila
impulz sily
12rr dddd vv mt pFI (5.22)
Kvapalina však tečie nepretržite a pri ustálenom toku rúra pôsobí na kvapalinu silou rF ,
ktorú možno vyjadriť z rovnice (5.22)
1212rd
dvvvv mQ
t
mF (5.23)
Obr. 5.18. Venturiho merač rýchlosti
prúdenia tekutiny.
h
12
´ ´
´
SS
SS
pp
pp
,,
,,
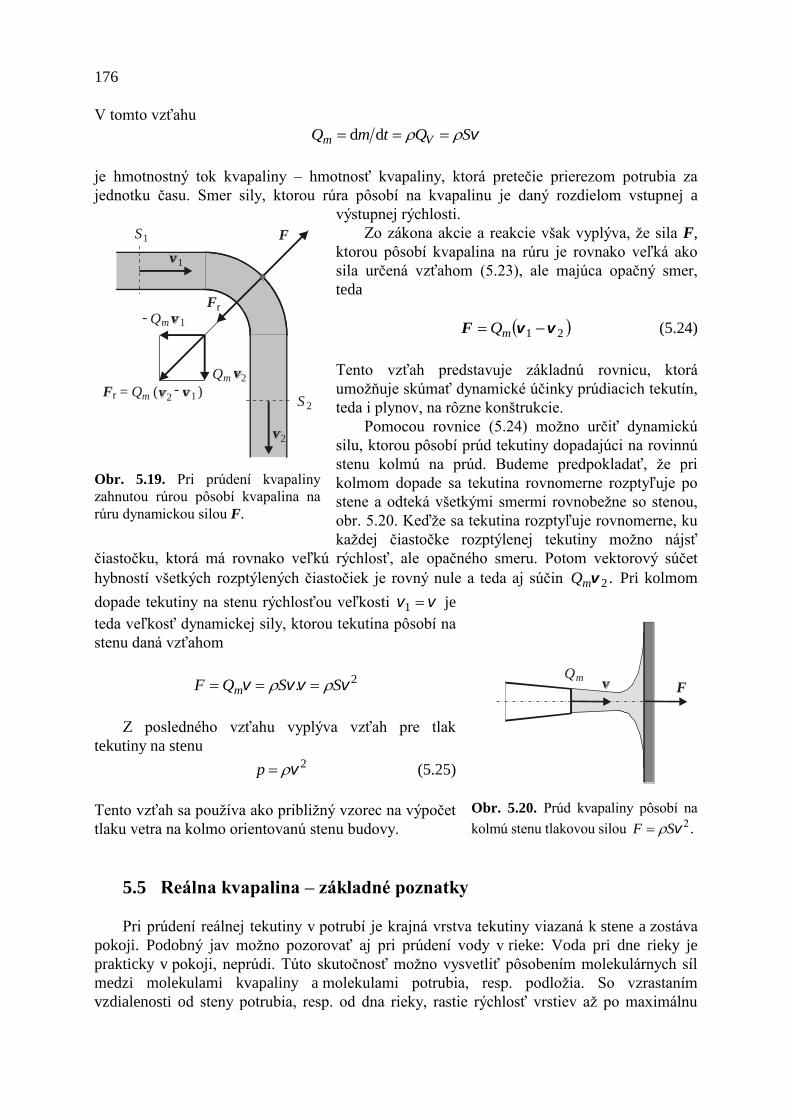
176
V tomto vzťahu
vSQtmQ Vm dd
je hmotnostný tok kvapaliny – hmotnosť kvapaliny, ktorá pretečie prierezom potrubia za
jednotku času. Smer sily, ktorou rúra pôsobí na kvapalinu je daný rozdielom vstupnej a
výstupnej rýchlosti.
Zo zákona akcie a reakcie však vyplýva, že sila F,
ktorou pôsobí kvapalina na rúru je rovnako veľká ako
sila určená vzťahom (5.23), ale majúca opačný smer,
teda
21 vv mQF (5.24)
Tento vzťah predstavuje základnú rovnicu, ktorá
umožňuje skúmať dynamické účinky prúdiacich tekutín,
teda i plynov, na rôzne konštrukcie.
Pomocou rovnice (5.24) možno určiť dynamickú
silu, ktorou pôsobí prúd tekutiny dopadajúci na rovinnú
stenu kolmú na prúd. Budeme predpokladať, že pri
kolmom dopade sa tekutina rovnomerne rozptyľuje po
stene a odteká všetkými smermi rovnobežne so stenou,
obr. 5.20. Keďže sa tekutina rozptyľuje rovnomerne, ku
každej čiastočke rozptýlenej tekutiny možno nájsť
čiastočku, ktorá má rovnako veľkú rýchlosť, ale opačného smeru. Potom vektorový súčet
hybností všetkých rozptýlených čiastočiek je rovný nule a teda aj súčin .Qm 2v Pri kolmom
dopade tekutiny na stenu rýchlosťou veľkosti vv 1 je
teda veľkosť dynamickej sily, ktorou tekutina pôsobí na
stenu daná vzťahom
2vvvv S.SQF m
Z posledného vzťahu vyplýva vzťah pre tlak
tekutiny na stenu 2vp (5.25)
Tento vzťah sa používa ako približný vzorec na výpočet
tlaku vetra na kolmo orientovanú stenu budovy.
5.5 Reálna kvapalina – základné poznatky
Pri prúdení reálnej tekutiny v potrubí je krajná vrstva tekutiny viazaná k stene a zostáva
pokoji. Podobný jav možno pozorovať aj pri prúdení vody v rieke: Voda pri dne rieky je
prakticky v pokoji, neprúdi. Túto skutočnosť možno vysvetliť pôsobením molekulárnych síl
medzi molekulami kvapaliny a molekulami potrubia, resp. podložia. So vzrastaním
vzdialenosti od steny potrubia, resp. od dna rieky, rastie rýchlosť vrstiev až po maximálnu
Obr. 5.19. Pri prúdení kvapaliny
zahnutou rúrou pôsobí kvapalina na
rúru dynamickou silou F.
Obr. 5.20. Prúd kvapaliny pôsobí na
kolmú stenu tlakovou silou .2vSF
S
S
1
1
1
2
2
2
Q
Q
m
m
F
F
r-
12mr-F = (Q )
QmF

177
rýchlosť v strede potrubia, resp. na hladine rieky, obr. 5.21. Medzi susednými vrstvami
kvapaliny existuje tangenciálne napätie, ktoré možno vyjadriť vzťahom
yd
dv (5.26)
Činiteľ sa nazýva dynamický koeficient viskozity
(vnútorného trenia). Hovoríme, že reálne kvapaliny sú
viskózne – existuje v nich vnútorné trenie. Koeficient
viskozity závisí pomerne výrazne od teploty. Kvôli ilustrácii
koeficienty dynamickej viskozity niektorých látok sú uvedené
v tabuľke 5.1. Poznámka: V bežnej reči sa hovorí, napr., že olej je hustejší ako
voda. To však nie je pravda. Správne by sme mali hovoriť – je
viskóznejší. Hustota, ako všetci dobre vieme, je hmotnosť objemovej jednotky a tú má olej menšiu ako voda –
olej pláva na vode. Preto si uvedomme túto skutočnosť: viskóznejšia kvapalina nemusí byť nutne hustejšia.
Tabuľka 5.1. Koeficienty dynamickej viskozity niektorých látok
Látka C
t
s .Pa
Vzduch 20 1,84.10-5
40 1,96.10-5
Olej 20 0,99
Glycerín 20 1,49
Ortuť 20 1,55.10-3
Voda 20 1.10-3
40 6,56.10-3
Ako príklad vypočítame prietok VQ viskóznej kvapaliny s koeficientom viskozity , cez
rúrku, ktorá má polomer r. Zvolíme si v kvapaline v rúrke súosový valec kvapaliny
(tieňovaný) s polomerom y a dĺžkou . Kvapalina sa pohybuje účinkom pretlaku (rozdielu
tlakov). Nech 21Δ ppp je tlakový rozdiel na koncoch zvoleného valca, obr. 5.22. Valec je
pri ustálenom prúdení v rovnováhe s ostatnou
prúdiacou kvapalinou, teda tlaková sila pF
pôsobiaca na základňu valca
2πyppSFp
musí byť v rovnováhe s trecou silou TF
yyyF
d
dπ2π2T
v
pôsobiacou medzi plášťom valca a ostatnou
kvapalinou. (Znamienko mínus vo vzťahu pre
je z toho dôvodu, že výraz yddv je
Obr. 5.21. Medzi vrstvami
reálnej kvapaliny pôsobí tangen-
ciálne napätie.
Obr. 5.22. V reálnej kvapaline tlaková sila pF
pôsobiaca na základňu valca musí byť v rovno-
váhe s trecou silou TF .
y
x
y
l
p p1 2
y
r
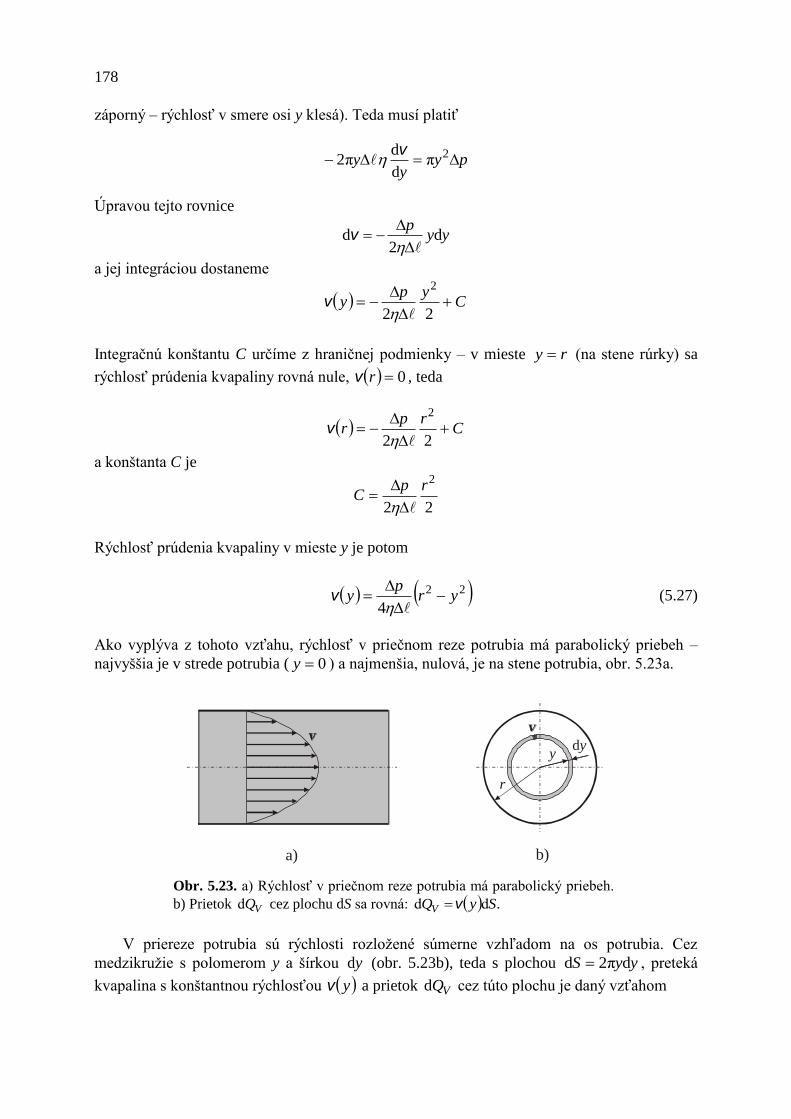
178
záporný – rýchlosť v smere osi y klesá). Teda musí platiť
pyy
y 2πd
dπ2
v
Úpravou tejto rovnice
yyp
d2
d
v
a jej integráciou dostaneme
Cyp
y
22
2
v
Integračnú konštantu C určíme z hraničnej podmienky – v mieste ry (na stene rúrky) sa
rýchlosť prúdenia kvapaliny rovná nule, 0rv , teda
Crp
r
22
2
v
a konštanta C je
22
2rpC
Rýchlosť prúdenia kvapaliny v mieste y je potom
22
4yr
py
v (5.27)
Ako vyplýva z tohoto vzťahu, rýchlosť v priečnom reze potrubia má parabolický priebeh –
najvyššia je v strede potrubia ( 0y ) a najmenšia, nulová, je na stene potrubia, obr. 5.23a.
V priereze potrubia sú rýchlosti rozložené súmerne vzhľadom na os potrubia. Cez
medzikružie s polomerom y a šírkou yd (obr. 5.23b), teda s plochou yyS dπ2d , preteká
kvapalina s konštantnou rýchlosťou yv a prietok VQd cez túto plochu je daný vzťahom
Obr. 5.23. a) Rýchlosť v priečnom reze potrubia má parabolický priebeh.
b) Prietok VQd cez plochu dS sa rovná: .SyQV dd v
r
ydy
a) b)

179
yyyrp
SyQV d 2
πdd 22
v
Integráciou tohto vzťahu v hraniciach od 0y po ry dostaneme prietok kvapaliny cez
potrubie
prQV
8
π 4
(5.28)
Tento vzťah sa nazýva Hagenov – Poisseuillov vzťah. Z neho možno určiť priemernú
prietokovú rýchlosť
8π
8
π2
2
4
pr
r
pr
S
QV v
Tlakový spád
v2
8
r
p
(5.29)
je príčinou prúdenia kvapaliny. Odporovú silu, pôsobiacu proti prietoku kvapaliny možno
pomocou vzťahu (5.29) vyjadriť takto
π8π8
2od vrv 2
rpSF
Ako vidno pri laminárnom prúdení je odporová sila úmerná prietokovej rýchlosti.
Podobne je to aj pri laminárnom obtekaní telies. Na guľu s polomerom r v neohraničenom
kvapalnom (i plynnom) prostredí pôsobí podľa vzťahu, ktorý odvodil Stokes odporová sila
veľkosti
vrF π6od (5.30)
úmerná rýchlosti, ktorou sa guľa pohybuje v kvapaline.
Príklad 5.8. Určíme dynamický koeficient viskozity
kvapaliny z pádu guľôčky v nej.
Riešenie: Kvapalinu, ktorej koeficient viskozity chceme
zmerať vlejeme do odmerného valca, pozri obr. 5.24. Do
kvapaliny vhodíme guľôčku s polomerom r, zhotovenú
z materiálu hustoty G . Na guľôčku pri pohybe v kvapaline
pôsobia tri sily: tiaž guľôčky ,GVgg F vztlaková sila
VgvzF a odporová sila, ktorej veľkosť je daná vzťahom
(5.30). V uvedených vzťahoch V je objem guľôčky a je
hustota kvapaliny. Ak ,G guľôčka padá v kvapaline
Obr. 5.24. Keď výsledná sila
pôsobiaca na guľôčku sa
rovná nule, guľôčka sa pohy-
buje rovnomerným pohybom.
F
FF
odvz
g l

180
smerom nadol. Spočiatku sa guľôčka pohybuje so zrýchlením, pretože tiaž pôsobiaca v smere
pohybu je väčšia ako súčet vztlakovej a odporovej sily, ktoré majú smer proti pohybu
guľôčky. Odporová sila však s narastajúcou rýchlosťou rastie, až v istom okamihu je výsledná
sila pôsobiaca na guľôčku rovná nule a guľôčka sa potom pohybuje rovnomerným pohybom,
t.zn. s konštantnou rýchlosťou. Vtedy platí
odvz FFFg
vrVgVg π6G (P1)
Rýchlosť určíme z dráhy prejdenej guľôčkou a príslušnej doby t: tv a objem V
guľôčky vypočítame podľa vzťahu: 3π4 3rV . Po vyjadrení z rovnice (P1) a do sadení za
V a v dostaneme vzťah na určenie dynamického koeficienta viskozity
9
2 2G trg
Poznatky uvedené v predchádzajúcom texte však neplatia pre turbulentné prúdenie.
Otázkou zmeny laminárneho prúdenia na turbulentné sa zaoberal Reynolds. Podľa neho
určité, bezrozmerné číslo Re (nazvané na jeho počesť Reynoldsovo číslo), rozhoduje o tom, či
je prúdenie laminárne alebo turbulentné
ddRe
vv (5.31)
V tomto vzťahu je kinematický koeficient viskozity, – hustota kvapaliny,
v – prietoková rýchlosť a d – priemer potrubia.
Pri určitej, tzv. kritickej rýchlosti kv dochádza k viditeľnému prechodu laminárneho
prúdenia na turbulentné. Prúdenie bude laminárne, keď 2000Re a turbulentné keď
3000Re . Oblasť medzi 2000 a 3000 je prechodná. Prúdenie je tu nestabilné a môže sa
náhodne meniť na laminárne a turbulentné. Prúdenie, ako sme už uviedli, bude laminárne,
keď 2000Re . Vypočítame tomu odpovedajúcu rýchlosť prúdenia vody v potrubí
s priemerom cm. 2d Kinematický koeficient viskozity vody je .. 126 s .m 101 Potom
11
2
126
s . cm 10s . m 10m 10 . 2
s .m 101 2000
,.
.d
ν Rekv
V technicky dôležitých prípadoch je prúdenie turbulentné.
5.6 Povrchové javy
Najdôležitejšou molekulárnou vlastnosťou kvapalín je existencia povrchového napätia.
Toto napätie je spôsobené tým, že molekuly v povrchovej vrstve majú iné okolie ako
molekuly nachádzajúce sa vnútri kvapaliny. Ako sme uviedli už v časti 5.1 molekuly
v povrchovej vrstve pôsobia potom na celú kvapalinu tlakom, ktorý nazývame molekulový
alebo aj kohézny tlak. Kohézne sily pôsobia kolmo na povrch kvapaliny a smerujú do jej
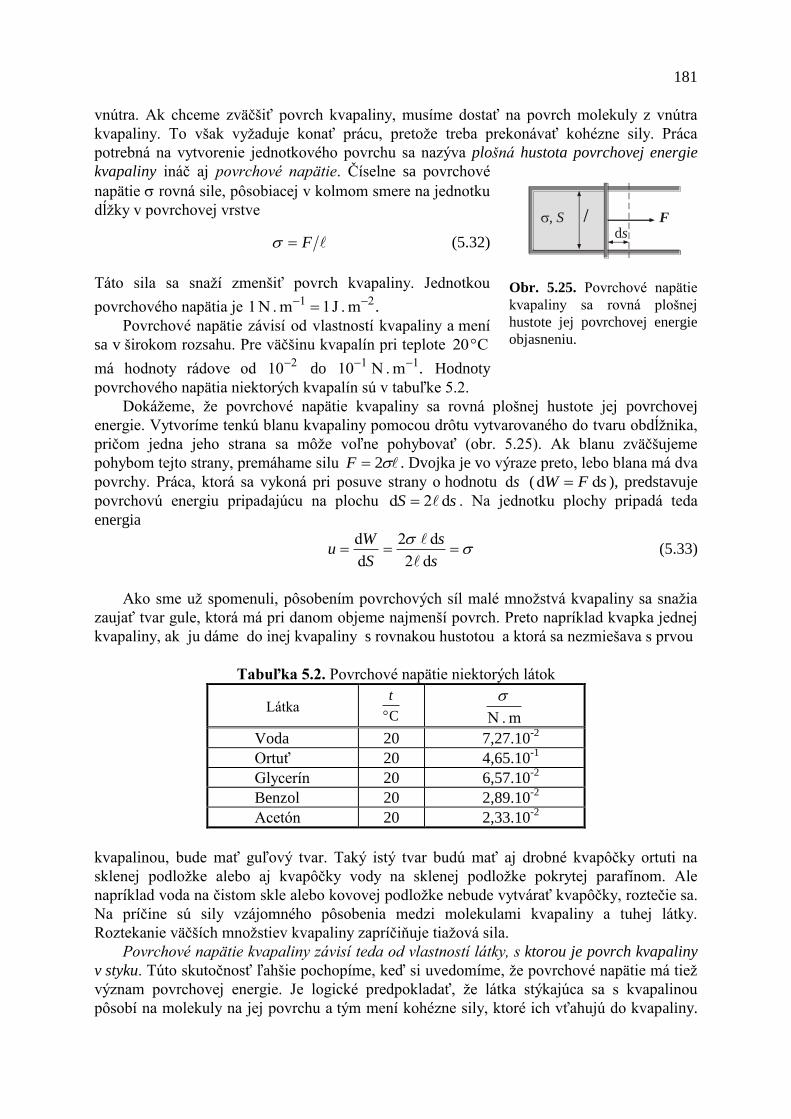
181
vnútra. Ak chceme zväčšiť povrch kvapaliny, musíme dostať na povrch molekuly z vnútra
kvapaliny. To však vyžaduje konať prácu, pretože treba prekonávať kohézne sily. Práca
potrebná na vytvorenie jednotkového povrchu sa nazýva plošná hustota povrchovej energie
kvapaliny ináč aj povrchové napätie. Číselne sa povrchové
napätie rovná sile, pôsobiacej v kolmom smere na jednotku
dĺžky v povrchovej vrstve
F (5.32)
Táto sila sa snaží zmenšiť povrch kvapaliny. Jednotkou
povrchového napätia je .21 m .J 1m .N 1
Povrchové napätie závisí od vlastností kvapaliny a mení
sa v širokom rozsahu. Pre väčšinu kvapalín pri teplote C 20
má hodnoty rádove od 210 do .11 m .N 10 Hodnoty
povrchového napätia niektorých kvapalín sú v tabuľke 5.2.
Dokážeme, že povrchové napätie kvapaliny sa rovná plošnej hustote jej povrchovej
energie. Vytvoríme tenkú blanu kvapaliny pomocou drôtu vytvarovaného do tvaru obdĺžnika,
pričom jedna jeho strana sa môže voľne pohybovať (obr. 5.25). Ak blanu zväčšujeme
pohybom tejto strany, premáhame silu 2F . Dvojka je vo výraze preto, lebo blana má dva
povrchy. Práca, ktorá sa vykoná pri posuve strany o hodnotu sd ( sFW d d ), predstavuje
povrchovú energiu pripadajúcu na plochu sS d 2d . Na jednotku plochy pripadá teda
energia
s
s
S
Wu
d 2
d 2
d
d
(5.33)
Ako sme už spomenuli, pôsobením povrchových síl malé množstvá kvapaliny sa snažia
zaujať tvar gule, ktorá má pri danom objeme najmenší povrch. Preto napríklad kvapka jednej
kvapaliny, ak ju dáme do inej kvapaliny s rovnakou hustotou a ktorá sa nezmiešava s prvou
Tabuľka 5.2. Povrchové napätie niektorých látok
Látka C
t
m .N
Voda 20 7,27.10-2
Ortuť 20 4,65.10-1
Glycerín 20 6,57.10-2
Benzol 20 2,89.10-2
Acetón 20 2,33.10-2
kvapalinou, bude mať guľový tvar. Taký istý tvar budú mať aj drobné kvapôčky ortuti na
sklenej podložke alebo aj kvapôčky vody na sklenej podložke pokrytej parafínom. Ale
napríklad voda na čistom skle alebo kovovej podložke nebude vytvárať kvapôčky, roztečie sa.
Na príčine sú sily vzájomného pôsobenia medzi molekulami kvapaliny a tuhej látky.
Roztekanie väčších množstiev kvapaliny zapríčiňuje tiažová sila.
Povrchové napätie kvapaliny závisí teda od vlastností látky, s ktorou je povrch kvapaliny
v styku. Túto skutočnosť ľahšie pochopíme, keď si uvedomíme, že povrchové napätie má tiež
význam povrchovej energie. Je logické predpokladať, že látka stýkajúca sa s kvapalinou
pôsobí na molekuly na jej povrchu a tým mení kohézne sily, ktoré ich vťahujú do kvapaliny.
Obr. 5.25. Povrchové napätie
kvapaliny sa rovná plošnej
hustote jej povrchovej energie
objasneniu.
l, S Fds
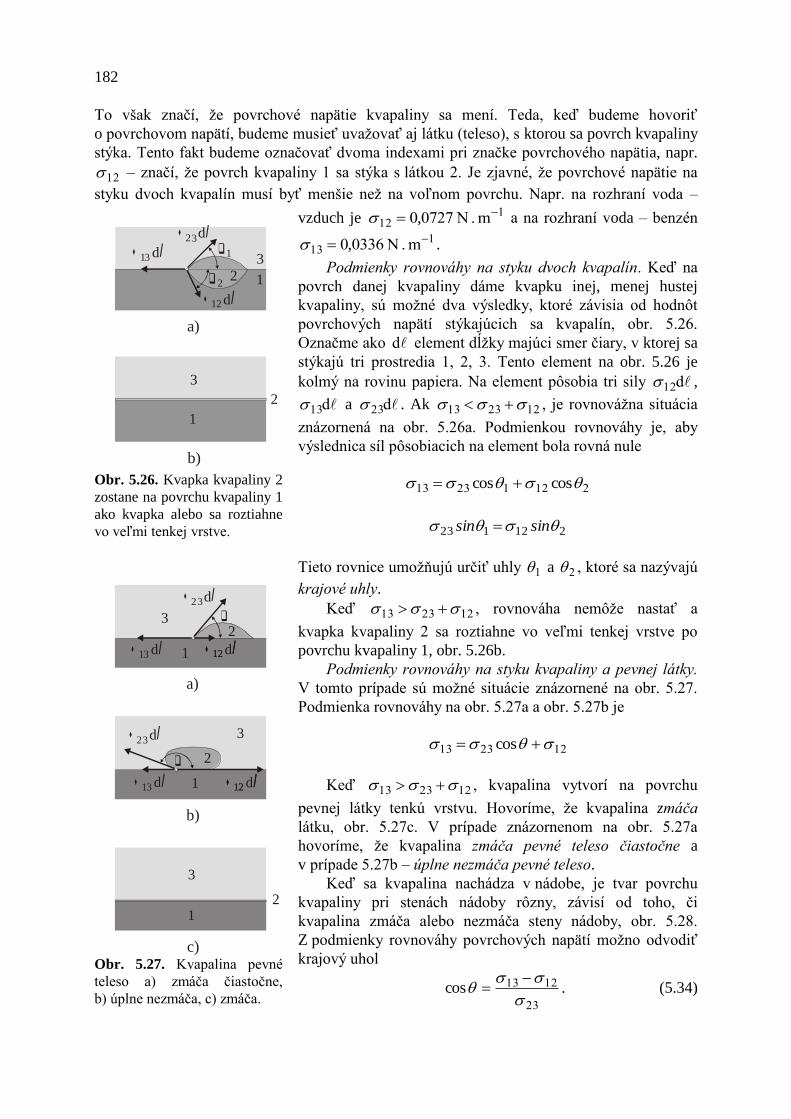
182
To však značí, že povrchové napätie kvapaliny sa mení. Teda, keď budeme hovoriť
o povrchovom napätí, budeme musieť uvažovať aj látku (teleso), s ktorou sa povrch kvapaliny
stýka. Tento fakt budeme označovať dvoma indexami pri značke povrchového napätia, napr.
12 – značí, že povrch kvapaliny 1 sa stýka s látkou 2. Je zjavné, že povrchové napätie na
styku dvoch kvapalín musí byť menšie než na voľnom povrchu. Napr. na rozhraní voda –
vzduch je 112 m .N 07270 , a na rozhraní voda – benzén
113 m .N 03360 , .
Podmienky rovnováhy na styku dvoch kvapalín. Keď na
povrch danej kvapaliny dáme kvapku inej, menej hustej
kvapaliny, sú možné dva výsledky, ktoré závisia od hodnôt
povrchových napätí stýkajúcich sa kvapalín, obr. 5.26.
Označme ako d element dĺžky majúci smer čiary, v ktorej sa
stýkajú tri prostredia 1, 2, 3. Tento element na obr. 5.26 je
kolmý na rovinu papiera. Na element pôsobia tri sily d12 ,
d13 a d23 . Ak 122313 , je rovnovážna situácia
znázornená na obr. 5.26a. Podmienkou rovnováhy je, aby
výslednica síl pôsobiacich na element bola rovná nule
21212313 coscos
212123 sinsin
Tieto rovnice umožňujú určiť uhly 1 a 2 , ktoré sa nazývajú
krajové uhly.
Keď 122313 , rovnováha nemôže nastať a
kvapka kvapaliny 2 sa roztiahne vo veľmi tenkej vrstve po
povrchu kvapaliny 1, obr. 5.26b.
Podmienky rovnováhy na styku kvapaliny a pevnej látky.
V tomto prípade sú možné situácie znázornené na obr. 5.27.
Podmienka rovnováhy na obr. 5.27a a obr. 5.27b je
122313 cos
Keď 122313 , kvapalina vytvorí na povrchu
pevnej látky tenkú vrstvu. Hovoríme, že kvapalina zmáča
látku, obr. 5.27c. V prípade znázornenom na obr. 5.27a
hovoríme, že kvapalina zmáča pevné teleso čiastočne a
v prípade 5.27b – úplne nezmáča pevné teleso.
Keď sa kvapalina nachádza v nádobe, je tvar povrchu
kvapaliny pri stenách nádoby rôzny, závisí od toho, či
kvapalina zmáča alebo nezmáča steny nádoby, obr. 5.28.
Z podmienky rovnováhy povrchových napätí možno odvodiť
krajový uhol
23
1213
cos . (5.34)
Obr. 5.26. Kvapka kvapaliny 2
zostane na povrchu kvapaliny 1
ako kvapka alebo sa roztiahne
vo veľmi tenkej vrstve.
Obr. 5.27. Kvapalina pevné
teleso a) zmáča čiastočne,
b) úplne nezmáča, c) zmáča.
d
d
d
1
1
1
1
1
2
2
2
2
2
3
3
3
3 ll
l
a)
b)
d
d
d
d
d
d
1
1
1
1
1
1
1
1
1
2
2
2
2
2
2
3
3
3
3
3
3
3
l
l
l
l
l
l
l
l
2
2
2
a)
b)
c)
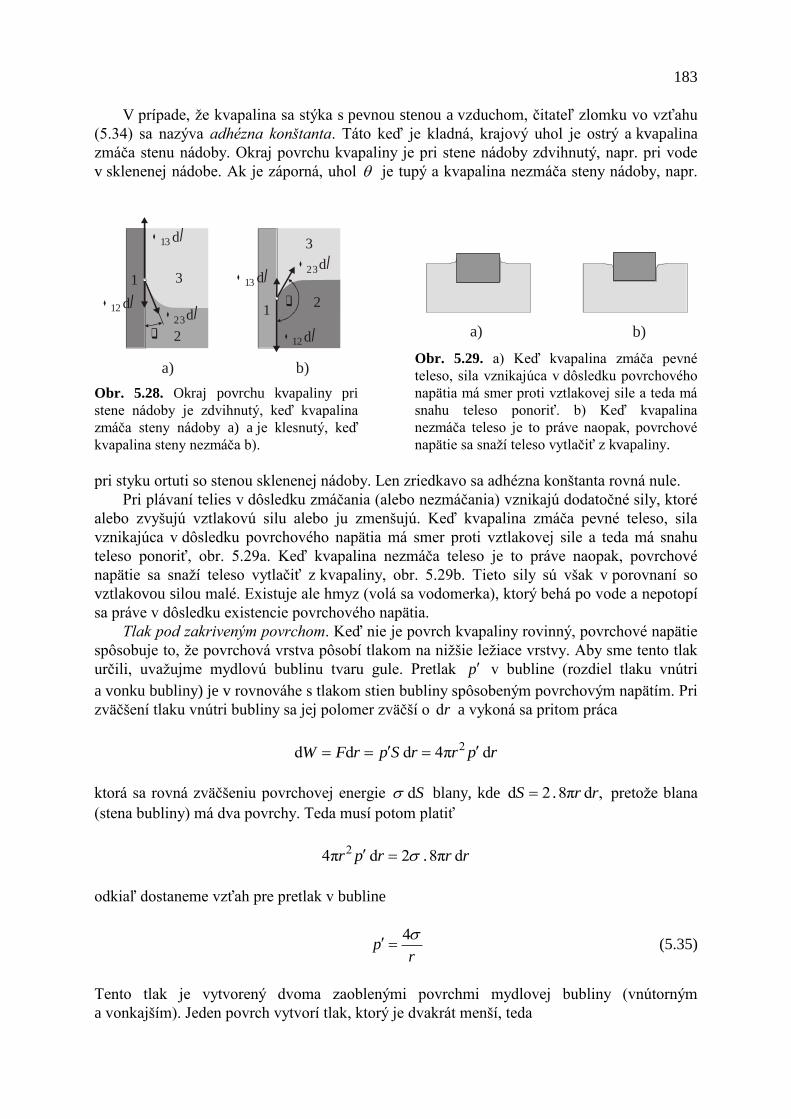
183
V prípade, že kvapalina sa stýka s pevnou stenou a vzduchom, čitateľ zlomku vo vzťahu
(5.34) sa nazýva adhézna konštanta. Táto keď je kladná, krajový uhol je ostrý a kvapalina
zmáča stenu nádoby. Okraj povrchu kvapaliny je pri stene nádoby zdvihnutý, napr. pri vode
v sklenenej nádobe. Ak je záporná, uhol je tupý a kvapalina nezmáča steny nádoby, napr.
pri styku ortuti so stenou sklenenej nádoby. Len zriedkavo sa adhézna konštanta rovná nule.
Pri plávaní telies v dôsledku zmáčania (alebo nezmáčania) vznikajú dodatočné sily, ktoré
alebo zvyšujú vztlakovú silu alebo ju zmenšujú. Keď kvapalina zmáča pevné teleso, sila
vznikajúca v dôsledku povrchového napätia má smer proti vztlakovej sile a teda má snahu
teleso ponoriť, obr. 5.29a. Keď kvapalina nezmáča teleso je to práve naopak, povrchové
napätie sa snaží teleso vytlačiť z kvapaliny, obr. 5.29b. Tieto sily sú však v porovnaní so
vztlakovou silou malé. Existuje ale hmyz (volá sa vodomerka), ktorý behá po vode a nepotopí
sa práve v dôsledku existencie povrchového napätia.
Tlak pod zakriveným povrchom. Keď nie je povrch kvapaliny rovinný, povrchové napätie
spôsobuje to, že povrchová vrstva pôsobí tlakom na nižšie ležiace vrstvy. Aby sme tento tlak
určili, uvažujme mydlovú bublinu tvaru gule. Pretlak p v bubline (rozdiel tlaku vnútri
a vonku bubliny) je v rovnováhe s tlakom stien bubliny spôsobeným povrchovým napätím. Pri
zväčšení tlaku vnútri bubliny sa jej polomer zväčší o rd a vykoná sa pritom práca
rprrSprFW d π4d dd 2
ktorá sa rovná zväčšeniu povrchovej energie Sd blany, kde ,d π8 2d rrS . pretože blana
(stena bubliny) má dva povrchy. Teda musí potom platiť
rrrpr d π8 2d π4 2 .
odkiaľ dostaneme vzťah pre pretlak v bubline
rp
4 (5.35)
Tento tlak je vytvorený dvoma zaoblenými povrchmi mydlovej bubliny (vnútorným
a vonkajším). Jeden povrch vytvorí tlak, ktorý je dvakrát menší, teda
Obr. 5.29. a) Keď kvapalina zmáča pevné
teleso, sila vznikajúca v dôsledku povrchového
napätia má smer proti vztlakovej sile a teda má
snahu teleso ponoriť. b) Keď kvapalina
nezmáča teleso je to práve naopak, povrchové
napätie sa snaží teleso vytlačiť z kvapaliny.
Obr. 5.28. Okraj povrchu kvapaliny pri
stene nádoby je zdvihnutý, keď kvapalina
zmáča steny nádoby a) a je klesnutý, keď
kvapalina steny nezmáča b).
a) b)
d
d
1
11
1
3
33
3l
l
d
d
1
1
2
2
l
l
d
d
2
2
2
23
3
l
l
a) b)

184
2
2
2
p
p (5.36)
Vo všeobecnom prípade krivosť plochy je určená dvoma hlavnými polomermi krivosti 1r
a 2r . Potom pretlak v bubline je daný vzťahom
21
11
rrp (5.37)
Tento vzťah sa nazýva Laplaceova rovnica. Pre 21 rr , ako je to v prípade mydlovej bubliny,
vzťah (5.37) prejde na vzťah (5.36). Preto, ak je na vonkajšej strane bubliny (v bode A) tlak
0p (obr. 5.30), podľa rovnice (5.36) je v bode B tlak r
pp2
0B a vnútri bubliny, v bode
C, tlak r
pr
pp 42
0BC . Pretlak v bubline r
ppp4
0C je teda taký istý ako
ho stanovuje vzťah (5.35).
Kapilárna elevácia a depresia. Keď do kvapaliny v širšej nádobe ponoríme v zvislej
polohe úzku rúrku s kruhovým prierezom, kapiláru, hladina kvapaliny bude v kapiláre v inej
výške ako v širokej nádobe. Kvapalina, ktorá zmáča steny kapiláry vystúpi v kapiláre nad
úroveň hladiny v širokej nádobe. Tomuto javu hovoríme kapilárna elevácia a zakrivený
povrch kvapaliny (meniskus) je dutý, obr. 5.31a. Keď kvapalina steny kapiláry nezmáča,
hladina kvapaliny v kapiláre je pod úrovňou hladiny v širokej nádobe – nastáva kapilárna
depresia a meniskus je vypuklý, obr. 5.31b.
Veľkosť kapilárnej elevácie aj depresie vyplýva z Laplaceovej rovnice. Povrch kvapaliny
má približne sférický tvar s polomerom R. Rozdiel tlakov p nad hladinou a pod hladinou sa
podľa vzťahu (5.36) rovná
R
ghppp
2
00
Tento vzťah možno upraviť takto
22
42
yr
y
Rgh
(5.38)
Obr. 5.31. a) Keď kvapalina zmáča steny kapiláry, nastáva
kapilárna elevácia. b) Keď kvapalina steny nezmáča, nastáva
kapilárna depresia.
Obr. 5.30. Pretlak v bubline
oproti atmosférickému tlaku
je rovný rp 4 .
R
2r
y
hh
a) b)
r
A
BC
p
p
p = p - p
0
0
C
C

185
kde je hustota kvapaliny, r – polomer kapiláry a y – hĺbka menisku. Vzťah (5.38) umožňuje
veľmi jednoducho merať povrchové napätie kvapaliny. Výška h, do ktorej vystúpi kvapalina
narastá so zmenšujúcim sa polomerom kapiláry, čo vyplýva z malej úpravy vzťahu (5.38)
rRgh
cos22
Z obr. 5.31a totiž vyplýva, že cosRr .
Analogicky by sme vypočítali aj hĺbku kapilárnej depresie, pri nezmáčavej kvapaline.
Povrchovo aktívne látky. Povrchová energia sa snaží dosiahnuť minimálnu hodnotu. Toto
je možné jednak zmenšením plochy povrchu, jednak zmenšením povrchového napätia. Preto,
keď dáme do kvapaliny inú kvapalinu s menším povrchovým napätím, táto sa bude
adsorbovať prevažne v povrchovej vrstve v dôsledku čoho sa povrchové napätie zmenší.
Takúto látku nazývame povrchovo – aktívnou látkou, napr. mydlo, jar, pur. Iné látky zväčšujú
povrchové napätie (napr. roztok cukru, roztoky rôznych solí atď.). Také látky, naopak,
koncentrujú sa mimo povrchovej vrstvy kvapaliny. Pri ich dodaní do roztoku, ktorý obsahuje
povrchovo aktívnu látku, sa aktívna látka intenzívne vytláča na povrch. Napríklad dodanie
soli do mydlového roztoku spôsobí vytlačenie mydla na povrch roztoku.
Súhrn
5.1 Úvod
Stavebné častice v kvapalných látkach sú usporiadané tesne, ale môžu sa vzájomne pomerne
voľne pohybovať. Atómy, resp. molekuly, nie sú viazané na jedno miesto. Kvapaliny sú málo
stlačiteľné a nemajú tvarovú stálosť – nadobudnú vždy tvar nádoby, v ktorej sú umiestnené.
Kvapaliny a plyny sa vyznačujú vlastnosťou, ktorú nazývame tekutosť. Preto tieto látky
nazývame spoločným názvom – tekutiny. Zavedieme si predstavu ideálnej tekutiny. Takáto
ideálna tekutina je dokonale tekutá, na zmenu svojho tvaru nepotrebuje žiadnu energiu.
V tekutine nepôsobí napätie v šmyku. Ďalšou charakteristikou ideálnosti nestlačiteľnosť.
Zvykom je deliť mechaniku kvapalín na hydrostatiku – zaoberá sa kvapalinami v pokoji a
hydrodynamiku, ktorá skúma kvapaliny z hľadiska ich pohybu.
5.2 Hydrostatika
Tlak p je definovaný ako podiel sily pôsobiacej kolmo na danú plochu a veľkosti S tejto
plochy
S
Fp (5.1)
Jednotkou tlaku je )( Pa,1m 1N 1 2 pascalp .
Základná rovnica hydrostatiky má tvar
konšt. gp (5.8)
kde p je tlak, – hustota kvapaliny a g – gravitačný potenciál v danom bode kvapaliny.
Slovne ju možno interpertovať takto: súčet tlaku (statického) a potenciálnej energie
jednotkového objemu kvapaliny je konštantný.

186
V gravitačnom poli Zeme, ak zvolíme 0g na hladine kvapaliny, je v hĺbke h potenciál
ghg a rovnica (5.8) nadobudne tvar
ghpp 0 (5.9)
kde p je tlak v hĺbke h, konšt0 p – tlak pôsobiaci na povrch kvapaliny.
Tlak p v rovnici (5.8) sa nazýva statický tlak a tlak ,ghph ktorý sa nazýva hydrostatický
tlak.
Pascalov zákon. Zmena tlaku aplikovaná na kvapalinu v nádobe sa prenáša nezmenene do
každého bodu kvapaliny a na steny nádoby.
Archimedov zákon. Teleso ponorené do tekutiny (kvapaliny, plynu) je nadľahčované silou,
ktorá sa rovná tiaži ním vytlačenej tekutiny. Jeho matematická formulácia je nasledujúca
gVF vz (5.12)
kde je hustota tekutiny, g – zrýchlenie voľného pádu a V – objem tekutiny vytlačenej
telesom (rovný objemu telesa ponoreného v tekutine). Silu vzF nazývame vztlakovou silou.
Plávanie. Teleso sa vznáša vo vode, keď t . Teleso padá ku dnu, keď t . Ponorené
teleso stúpa ku hladine, keď t . Teleso pláva na vode, keď t a teleso nie je celé
ponorené. Vtedy mgF vz . V predchádzajúcich vzťahoch t a sú hustoty telesa a vody.
5.3 Hydrodynamika
Pohyb kvapaliny je úplne určený, keď v každom bode vnútri kvapaliny je daná rýchlosť
pohybu jej „čiastočiek“. Rýchlosť v čiastočiek je funkciou polohy aj času, t,rvv .
Rozloženie rýchlostí v čiastočiek predstavuje vektorové pole. Keď rýchlosť v závisí len od
polohy, hovoríme, že prúdenie je ustálené (stacionárne). Prúdnicou budeme nazývať
trajektóriu, po ktorej sa pohybuje vybraná čiastočka kvapaliny. Vektor rýchlosti v čiastočky
má vždy smer dotyčnice ku prúdnici. Keď ľubovoľnou uzavretou krivkou vnútri kvapaliny
preložíme všetky prúdnice, tieto vytvoria prúdovú trubicu.
Rovnica spojitosti (kontinuity)
konšt.vS (5.13)
je dôsledkom nestlačiteľnosti kvapaliny.
Eulerova rovnica
pt
g grad1
gradgrad
vv
v (5.14)
opisuje pohyb kvapaliny, pri ktorom môžu vznikať vo všeobecnosti aj víry. V tomto prípade
je problém veľmi zložitý.
Bernoulliho rovnica
.pgh konšt2
1 2v (5.17)
vyjadruje zákon zachovania energie v kvapaline. Prvý člen v rovnici (5.17) predstavuje
kinetickú energiu objemovej jednotky kvapaliny, druhý člen je potenciálna energia objemovej

187
jednotky a tretí, tlak, možno chápať aj ako potenciálnu tlakovú energiu jednotkového objemu
( 332 mJ 1mN.m 1mN 1 Pa1 ).
V mieste, kde je kvapalina v pokoji, ako vyplýva z rovnice (5.17), je tlak
ghp konšt (5.18)
Tento tlak nazývame statický tlak. Tlak v rovnakej výške h (h je kladné, ak „ideme“ smerom
nahor od zvolenej nulovej úrovne a je záporné, keď ideme dole), keď tam kvapalina prúdi
rýchlosťou v je
2d
2
1konšt v ghp
a tento tlak nazývame dynamický. Vidíme, že pri rovnakom h, tam, kde kvapalina (alebo aj
plyn) prúdi väčšou rýchlosťou je tlak nižší.
Rýchlosť vytekania kvapaliny z nádrže cez malý otvor v bočnej stene v hĺbke h pod hladinou
kvapaliny je daná vzťahom
gh2v (5.21)
Pitotova trubica a Venturiho merač slúžia na meranie rýchlosti prúdenia kvapaliny v potrubí.
5.4 Dynamické účinky prúdiacej kvapaliny
Sila F, ktorou pôsobí kvapalina na rúru pri pretekaní cez pravouhlé koleno je určená vzťahom
21 vv mQF (5.24)
kde mQ je hmotnostný tok kvapaliny – hmotnosť kvapaliny, ktorá pretečie prierezom potrubia
za jednotku času. Smer sily, ktorou rúra pôsobí na kvapalinu je daný rozdielom vstupnej 1v a
výstupnej 2v rýchlosti.
Vzťah 2vp (5.25)
sa používa ako približný vzorec na výpočet tlaku vetra na kolmo orientovanú stenu budovy.
5.5 Reálna kvapalina – základné poznatky
So vzrastaním vzdialenosti od steny potrubia, resp. od dna rieky, rastie rýchlosť vrstiev
kvapaliny až po maximálnu rýchlosť v strede potrubia, resp. na hladine rieky. Medzi
susednými vrstvami kvapaliny existuje tangenciálne napätie, ktoré možno vyjadriť vzťahom
yd
dv (5.26)
Činiteľ sa nazýva dynamický koeficient viskozity (vnútorného trenia). yddv predstavuje
spád rýchlosti v smere kolmom na tok kvapaliny.
Rýchlosť prúdenia kvapaliny v potrubí v mieste vzdialenom od osi potrubia o y je
22
4yr
py
v (5.27)

188
Ako vyplýva z tohoto vzťahu, rýchlosť v priečnom reze potrubia má parabolický priebeh –
najvyššia je v strede potrubia ( 0y ) a najmenšia, nulová, je na stene potrubia.
Prietok reálnej kvapaliny cez potrubie vypočítame podľa vzťahu
prQV
8
π 4
(5.28)
Tento vzťah sa nazýva Hagenov – Poisseuillov vzťah.
Na guľu s polomerom r v neohraničenom kvapalnom (i plynnom) prostredí pôsobí podľa
vzťahu, ktorý odvodil Stokes odporová sila veľkosti
vrF π6od (5.30)
úmerná rýchlosti, ktorou sa guľa pohybuje v kvapaline.
Reynoldsovo číslo, rozhoduje o tom, či je prúdenie laminárne alebo turbulentné
ddRe
vv (5.31)
V tomto vzťahu je kinematický koeficient viskozity, – hustota kvapaliny,
v – prietoková rýchlosť a d – priemer potrubia.
5.6 Povrchové javy
Práca potrebná na vytvorenie jednotkového povrchu sa nazýva plošná hustota povrchovej
energie kvapaliny ináč aj povrchové napätie. Číselne sa povrchové napätie rovná sile,
pôsobiacej v kolmom smere na jednotku dĺžky v povrchovej vrstve
F (5.32)
Táto sila sa snaží zmenšiť povrch kvapaliny. Jednotkou povrchového napätia je
.21 m .J 1m .N 1
Povrchové napätie kvapaliny závisí od vlastností látky, s ktorou je povrch kvapaliny v styku.
Kvapalina zmáča látku, keď sa roztiahne po nej vo veľmi tenkej vrstve. V prípade, keď
vytvára na povrchu „guľôčky“ úplne nezmáča pevné teleso. Medzi týmito dvoma krajnými
prípadmi leží prípad, keď kvapalina zmáča pevné teleso čiastočne.
Pretlak v bubline (rozdiel tlaku v bubline a mimo bubliny) je daný vzťahom
21
11
rrp (5.37)
Tento vzťah sa nazýva Laplaceova rovnica.
Kapilárna elevácia a depresia. Keď do kvapaliny v širšej nádobe ponoríme v zvislej polohe
úzku rúrku s kruhovým prierezom, kapiláru, hladina kvapaliny bude v kapiláre v inej výške
ako v širokej nádobe. Kvapalina, ktorá zmáča steny kapiláry vystúpi v kapiláre nad úroveň
hladiny v širokej nádobe. Tomuto javu hovoríme kapilárna elevácia a zakrivený povrch
kvapaliny (meniskus) je dutý. Keď kvapalina steny kapiláry nezmáča, hladina kvapaliny
v kapiláre je pod úrovňou hladiny v širokej nádobe – nastáva kapilárna depresia a meniskus
je vypuklý.
Recommended

















