Embed Size (px)
Citation preview

Wireless replacement for cables in CAN Network Pros and Cons by Derek Sum

TABLE OF CONTENT
- Introduction
- Concept of wireless cable replacement
- Wireless CAN cable hardware
- Real time performance and latency
- Data throughput and bandwidth
- Diagnostic over wireless link
- Cable Length vs Radio Range
- Data Security
- Error handling

CABLE REPLACEMENT
Can we make a cut on the cable and use wireless to continue the communication?

WHY WE NEED WIRELESS
Simplify Cable Harnessing in a system.
Difficulty of cable servicing/maintenance
Cable is expensive
Isolation

CURRENT WIRELESS TECHNOLOGY
Licensed Free ISM Band
2.4Ghz, 915Mhz, and 868Mhz
FHSS - frequency hopping spread spectrum
Wi-Fi, Bluetooth, Zigbee or proprietary radio protocol

ADVANTAGE OF CAN BUS SYSTEM
Broadcast Communication
– Distributed Control System
- Real Time performance
Scheduling and Priority Mechanism
Excellent Error Handling Capabilities

CONCEPT OF WIRELESS CABLE REPLACEMENT
CAN's arbitration feature is lost
Same as the Error Checking
The concept of original system design to be changed or adapted.
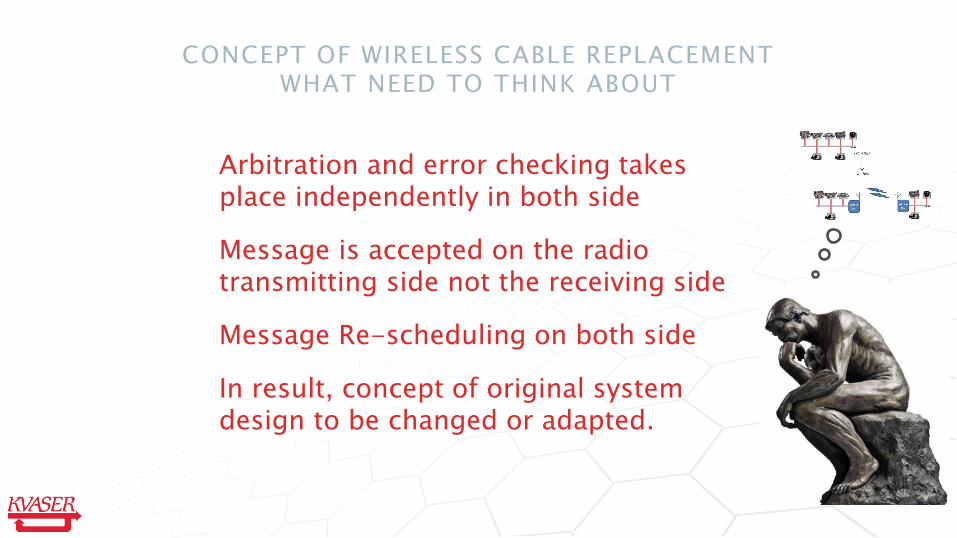
CONCEPT OF WIRELESS CABLE REPLACEMENT WHAT NEED TO THINK ABOUT
Arbitration and error checking takes place independently in both side
Message is accepted on the radio transmitting side not the receiving side
Message Re-scheduling on both side
In result, concept of original system design to be changed or adapted.
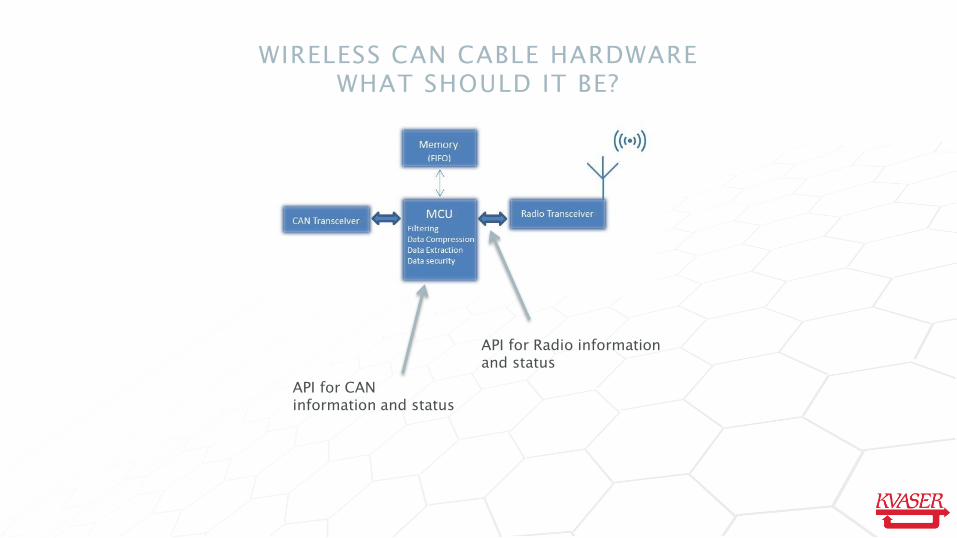
WIRELESS CAN CABLE HARDWARE WHAT SHOULD IT BE?
API for Radio information and status
API for CAN information and status

WHY NOT WIFI OR BLUETOOTH
• Range – Short i.e. BT
• Data throughput
• Latency – Unpredictable latency
• Security – Well Known encryption mechanism

REAL TIME PERFORMANCE AND LATENCY
In the wireless environment, latency is inevitable
A lot of radio protocols quietly handle acknowledgement, error detection and retransmission
These are the expenses of data throughput and variable latency

REAL TIME PERFORMANCE AND LATENCY
Internal wait buffer as well as processing of cross traffic
If there is any error causing re-transmission of the packet?
How clean is the air space?
Q: Can we know the latency?

REAL TIME PERFORMANCE AND LATENCY
We need to know:
1. maximum latency within a successful radio packet transmission.
2. Control of the re-transmission mechanism
To handle normal condition as well as worst case scenario
DATA THROUGHPUT AND BANDWIDTH BETWEEN RADIO AND CAN PROTOCOL
Data throughput is a major consideration for any Wireless implementation
Radio Protocol such as Wifi can be up to 20, 40Mhz with possible data throughput of hundreds Mbits
However, 1 to 2Mhz radio bandwidths is widely used by industrial applications with CAN.

DATA THROUGHPUT AND BANDWIDTH BETWEEN RADIO AND CAN PROTOCOL
There is overhead on each Radio Packet
Actual data throughput may less than what it could be imagined.(industrial application 20kbps to 128kbps)
Filtering and message scheduling is required for higher CAN Bandwidth.
The capacity of the Radio device need to be available

DIAGNOSTIC OVER WIRELESS LINK
Fact:
In One way or the other, a wireless cable replacement is also an individual ECU within a system.
Therefore:
Wireless link should provide self-check information such as:
Radio packet information, radio signal quality, any history of error occurrence, any re-transmission of the packet

DIAGNOSTIC OVER WIRELESS LINK
Diagnostic Higher Layer Protocol
Protocol such as J1939, 15765..etc has timing requirement over the handshaking and transmitting of the CAN messages
The real time figure will be important
i.e.
- A controllable latency over the radio packet
- Good buffering to handle burst messages
The rule of thumb is that if the message burst exceeds the capacity of the buffer * latency, there will be CAN message loss.
CABLE LENGTH RADIO RANGE VS CAN BUS DISTANCE
The recommend practice of CAN cable length on different bandwidth is well known.
However, there are factors that affecting the Radio range:
- output power and it antenna diagram
- the quality of the antennas
- physical objects in the wave path causing radio shadows, reflections and absorptions,
- weather conditions
CABLE LENGTH RADIO RANGE VS CAN BUS DISTANCE
The simple rule is that frequency band is proportional to the available bandwidth but inversely to the effective distance and propagation through obstacles.
E.g. the ISM band is widely used for 2 solution types:
- 900 MHz for longer range, lower bandwidth
- 2.4 GHz for higher bandwidth, lower range

CABLE LENGTH RADIO RANGE VS CAN BUS DISTANCE
2.4GHz offers:
- more bandwidth (i.e. data throughput)
- a worldwide frequency band for use in multiple countries
- smaller antenna implementation.
900Mhz offers:
- System implementation requires a larger range
- Remote movable device/system in large area.
- Government restriction of the use of a higher frequency band in certain heavy duty industrial areas.

CABLE LENGTH RADIO RANGE VS CAN BUS DISTANCE
It is recommended that any wireless connection should better be verified by practical tests on site.
However we could still enhanced the radio range performance by:
- Increase the antenna power i.e. Use of a power amplifier to increase the dBm level of the transmitter
- Use of advanced receiving antennas. e.g. Diversity antennas, array antennas, rake antennas, etc.

DATA SECURITY OVER WIRELESS
Things to concern over Wireless communication with CAN
- No more physical appearance
- radio packet and its content is exposed to the Air
- Possible risk of steal, modify, duplicate the content of radio packet

DATA SECURITY OVER WIRELESS
Protocol such as Wifi, Bluetooth has well known encryption and security.
Prefer propriety radio protocol which we are in control of the radio packet format.
Additional with possible authentication, encryption or addressing method to enhanced safety of data
Note: any additional security methods could possibly reduce the payload capacity and prolong the latency

ERROR HANDLING OF CAN OVER WIRELESS
The CAN Bus protocol has a state of the art complete error handling mechanism.
However, in a wireless implementation, the physical network will be split into two, with each network having 2 sets of error handling mechanism(CAN and Radio).

ERROR HANDLING OF CAN OVER WIRELESS
Wireless cable replacement should possible to broadcast its status as well as Error Handling Status to the CAN Network
Vice versa, a pair of wireless cable replacements could also monitor the CAN Network and thus report abnormal CAN activities to the other side over the radio link.

CONCLUSION
- A propriety radio protocol with Controllable/Measurable latency
- A good size of internal buffer that takes account
- Wireless link self-information/status need to be available for CAN System use (or system designer)
- Error handling information available between CAN protocol and Radio Protocol.
- A certain level of data security that does not affect the actual throughput or cause delay over the communication.

Thank you