Embed Size (px)
Citation preview

Úvod do robotiky a mechatroniky (URM)
Prednáška c. 1:
Mechatronika a robotika jako vednídisciplína
M. Švejda
FAV, ZCU v Plzni, Katedra kybernetiky
poslední revize: 23. 9. 2014
M. Švejda predmet URM, prednáška c. 1

Organizace predmetu URM
Prednášející: Ing. Martin Švejda, UN 534,[email protected]
Garant predmetu: Prof. Ing. Miloš Schlegel, CSc., UN 539,[email protected]
Prednášky: úterý 8:25 - 11:00, UC 453Cvicení: ctvrtek 12:05 - 13:45 (závislé na prednáškách),
UL 432, UN 534, vyucující: Ing. Arnold Jáger
Podmínky absolvování predmetu:Vypracování semestrální práce (návod na vypracováníbude rešen v rámci cvicení)Záverecný písemný test (termín bude vcas upresnen)Ústní zkouška (po záverecném testu)
M. Švejda predmet URM, prednáška c. 1
Semestrální práce ⇒ zápocet
zadání pro maximálne dvojice studentu (jeden referát,jedny simulacní výsledky)odevzdání semestrální práce alespon týden pred zkouškoupríprava na rešení sem. práce v rámci cvicenízadání sem. práce obdržíte behem semestrupodmínky vypracování sem. práce - viz cvicení
M. Švejda predmet URM, prednáška c. 1

Doporucená literatura:
Prednášky z predmetu URM(dostupné na: http://home.zcu.cz/~msvejda/URM/)M. Goubej, M. Švejda, M. Schlegel:Úvod do mechatroniky, robotiky a systému rízení pohybu(skripta, KKY, ZCU, 2012)M. Švejda: Kinematika robotických architektur(práce k státní dok. zk, 2011, stále aktualizovaná verze, dostupné na:http://home.zcu.cz/~msvejda/URM/)L. Sciavicco, B. Siciliano:Modelling and Control of Robot Manipulators(Springer, 2nd edition, 2000)W. Khalil, E. Dombre:Modeling, Identification and Control of Robots(Butterworth-Heinemann, 2004)Mark W. Spong, Seth Hutchinson, and M. Vidyasagar:Robot Modeling and Control(JOHN WILEY and SONS, INC.)odborné clánky a výzkumné zprávy rešené na KKY v oblasti robotika(dostupné na:http://home.zcu.cz/~msvejda/_publications/)
M. Švejda predmet URM, prednáška c. 1
Mechatronika
Definice:Mechatronika sjednocuje principy mechaniky, elektroniky,optiky, informatiky a automatického rízení za úcelemkonstruování jednodušších, úcinejších a spolehlivejšíchsystému.
Pojem mechatronika prvne použit inženýr japonské firmyYaskawa (výroba el.servopohonu, atd.), Tetsuro Mori vroce 1969.Mezi disciplínami mechatroniky má význacné postavenítechnická kybernetika, konkrétne obor automatické rízenídodává „skrytý dumysl“ elektromechanickým zarízenímprostrednictvím vhodných senzoru, aktuátoru a principuzpetnovazebního rízení (vložené rízení)⇒ možnost lokálne „menit fyzikální zákony“ ve smyslujejich vnímání pozorovatelem
M. Švejda predmet URM, prednáška c. 1

Mechatronika
Príklady:Stabilizace nestabilních rovnovážných poloh zarízení(inverzní kyvadlo na vozíku, inverzní rotacní kyvadlo,portálový robot balancující míc, ...)Aktivní potlacení kmitu (napr. piezo senzor + aktuátormenící frekvencní chování nosníku,...)Aktuátory robotu zvyšující tuhost konstrukce, atd.Takové systémy považujeme za aktivní mechanickésoustavy - zmena fyzikálních vlastností pasivníhosystému je docílena aktivním pusobením nejakéhopomocného zdroje energie (rídící systém)
M. Švejda predmet URM, prednáška c. 1

Mechatronika - obory a aplikace
M. Švejda predmet URM, prednáška c. 1

Mechatronika - nekteré typické aplikace
1 Mikro a nano elektromechanické systémy (MEMS/NEMS -Micro/Nano-Electro-Mechanical Systems)
elektromechanické snímace v jediném cipu (elektronika +mechanika + rízení)snímání neelektrických velicin (rychlosti, zrychlení, náklon,atd.)kombinace technologií MEMS/NEMS do kompaktníchjednotek, napr. Inertial measurement unit (merení rychlostí,zrychleních orientace pohybujících se predmetu)
MEMS akcelerometr IMU (3x akcelerometr, 3xgyroskop)
M. Švejda predmet URM, prednáška c. 1

Mechatronika - nekteré typické aplikace
2 Prumysl motorových vozidelelektronické rízení výkonu, „drive-by-wire“ systémy,tempomaty, rízení odstupu vozidelautomatické prevodovky, brzdové systémy (ABS), rízenítrakce (ESP)
3 Aktivní tlumení vibrací mechanických soustavv technologických procesech dochází k vybuzovánívlastních frekvencí mech. soustav (torzní kmitání hrídelemotoru, kmitání vetknutého nosníku, suportu obrábecíhostroje, kmitání bremene zavešeného na pružném lanejerábu, atd.)Metody tlumení:
predzpracování vstupního signálu filtrem tak, aby nevybudilkmitavé módy systému (Zero Vibration Filter) (prímovazebnírízení)potlacení vibrací zpetnovazebním rízením (pole placement,frequency shaping, atd.)
M. Švejda predmet URM, prednáška c. 1

Mechatronika - nekteré typické aplikace (HIL)
4 Hardware in the loop (HIL)s rozvojem výpocetní technikyvelmi efektivní metoda návrhurídicích systému (rapid prototyping)jedna cást rídicí smycky (napr.model brzdového systémuautomobilu) simulována numerickyna dané hardwarové platforme(matematicky-fyzikální modelování,identifikace, vstupní a výstupnímoduly (rozhraní), atd.)druhá cást rídicí smycky (napr.rídící jednotka ABS)reprezentována reálným zarízeníms príslušnými vstupy a výstupymodel je vytvoren a rízen tak, abysimuloval ruzné pracovnípodmínky, se kterými se musí rídícíjednotka vyporádat
M. Švejda predmet URM, prednáška c. 1
Mechatronika - nekteré typické aplikace (HIL)
hlavní duvody použití HIL:rozšírení možnosti testování: testy rídící jednotky na reálnémzarízení jsou casto limitujícím faktorem (extrémní podmínky testu⇒ bezpecnost, atd.), numerický model „snese nesnesitelné“zacházení (rízení) bez fatálních dusledkuparalelní vývoj: HIL umožnuje paralelní vývoj prototypu aalgoritmu rízení (testování rízení na numerickém modelu) ⇒rychlý vývoj (napr. v okamžiku dokoncení prototypu motoruautomobilu je již 95% rízení navrženo metodou HIL)režijní náklady na tvorbu prototypu: tvorba prototypu jemnohem nákladnejší, než tvorba numerického modelu (napr. HILtestování rídících jednotek proudových motoru je cca 10x levnejšínež výroba prototypu)zaclenení lidského faktoru: v mnoha aplikacích nutno uzpusobitrízení s ohledem na interakci s obsluhou (napr. u systém„flight-by-wire“ nutno nastavit vhodne interakci kniplu s obsluhou(force feedback) ⇒ nutné zaclenení cloveka do návrhu ⇒ HILzajišt’uje bezpecnost, nízké náklady, paralelní vývoj, atd...)
M. Švejda predmet URM, prednáška c. 1

Mechatronika - nekteré typické aplikace (MBD)
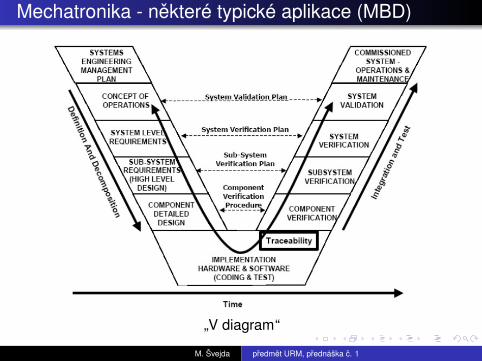
4 Model based design (MBD)metoda syntézy rídicích systému založená na využitímatematického modelu rízeného systémuefektivní prístup k organizaci celého procesu syntézyrídících systému založený na tzv. „V diagram“založeno na modulárním prístupu (bloky reprezentujícímodel rízeného systému, regulátoru, atd.)MBD umožnuje analyzovat chování kompletního rídícíhosystému mnohem dríve, než je rízení aplikováno nareálném prototypudíky moderním softwarovým nástrojum (Matlab, Simulink,SimMechanics, Maple, Mathematica, Modelica, atd.) lzevytváret komplexní modely reálných aplikací (multi-domainmodeling)závažné chyby v návrhu zarízení ci rídícího systému možnoodhalit v rané fázi (pred zahájením nákupu komponent,fyzické realizaci prototypu, atd.)
M. Švejda predmet URM, prednáška c. 1
Mechatronika - nekteré typické aplikace (MBD)
„V diagram“
M. Švejda predmet URM, prednáška c. 1

Mechatronika - nekteré typické aplikace (MBD)
Príklad MBD (1/4):Návrh konstrukce 4 DoF manipulátoru (RRPR) pro obvodovéUZ merení svaru nátrubku
Cíl: specifikovat aktuátory manipulátoru metodou MBD(pro danou konstrukci manipulátoru)model manipulátoru vytvoren v prostredíSimulink/SimMechanicsgenerátor trajektorie - požadovaný pohyb koncovéhoefektoru po mereném svaru (poloh, rychlost, zrychlení)„inverzní kinematické úloha“ - transformace požadovanéhopohybu konc. ef. do kloubových souradnic manipulátoru ⇒požadované polohy, rychlosti a zrychlení aktuátoruvyužito režimu „inverzní dynamiky“ - v dusledkupožadovaného pohybu kloubu manipulátoru (poloha,rychlost, zrychlení) jsou generovány požadované silovépusobení v kloubech manipulátoru ⇒ požadovanésíly/silové momenty aktuátoru
M. Švejda predmet URM, prednáška c. 1

Mechatronika - nekteré typické aplikace (MBD)
Príklad MBD (2/4):
sériový neredundantnímanipulátor typu RRPR3 rotacní aktuátory (vcetnepojezdu po potrubí), 1lineární aktuátor4 DoF koncovéhoefektoru(3 translacní, 1rotacní)
M. Švejda predmet URM, prednáška c. 1

Mechatronika - nekteré typické aplikace (MBD)
Príklad MBD (3/4):
Simulacní model Simulink/SimMechanicsVizualizace Simulink/SimMechanics
M. Švejda predmet URM, prednáška c. 1

Mechatronika - nekteré typické aplikace (MBD)
Príklad MBD (4/4):
0 2 4 6 8−4
−2
0
2
4
t[s]
q1 [r
ad, r
ad/s
, rad
/s2 ]
max. [V,A] = [1.2499, 1.25] [rad/s,rad/s2]
posvelaccel
0 2 4 6 8−2
0
2
4
t[s]
q2 [r
ad, r
ad/s
, rad
/s2 ]
max. [V,A] = [0.047806, 0.19394] [rad/s,rad/s2]
0 2 4 6 8−2
−1
0
1
t[s]
q3 [m
, m/s
, m/s
2 ]
max. [dP,minP,V,A] = [0.29147, 0.24764, 0.2944, 1.9025] [m,m/s,m/s2]
0 2 4 6 8−1.5
−1
−0.5
0
0.5
t[s]
q4 [r
ad, r
ad/s
, rad
/s2 ]
max. [V,A] = [0.047806, 0.19394] [rad/s,rad/s2]
Požadované polohy/rychlosti/zrychlení
aktuátoru
0 2 4 6 8−5
0
5
t[s]
q1 M
[Nm
]
max. M = 4.4298[Nm]
0 2 4 6 85
10
15
20
t[s]
q2 M
[Nm
]
max. M = 15.1931[Nm]
0 2 4 6 8−35
−30
−25
−20
−15
t[s]
q3 F
[N]
max. F = 30.8947[N]
0 2 4 6 80.9
1
1.1
1.2
1.3
t[s]
q4 M
[Nm
]
max. M = 1.2667[Nm]
Požadované síly/momenty aktuátoru
M. Švejda predmet URM, prednáška c. 1

Robotika
robotika = nauka o robotech (celý proces „zrození“ robotu)jeden z významných odvetví oboru mechatronikamezi významné obory robotiky patrí:
návrh konstrukce manipulátoru (MBD, optimalizacestruktury/parametru, volba senzoru a aktuátoru)návrh vhodného algoritmu rízení (kinematické závislosti,centralizované/decentralizované metody rízení, generovánítrajektorií, tlumení vibrací, vizualizace, atd.)simulace a testování (HIL, využití pokrocilých softwarovýchnástroju, testování prototypu, atd.)finální uvedení do provozu (optimalizace uživatelskéhorozhraní, napr. pro speciální aplikace)
M. Švejda predmet URM, prednáška c. 1

Robotika (základní rozdelení robotu)
1 Manipulátorypuvodne mechanická, pozdeji elektromechanická zarízeníhl. úcel: zesilovat a/nebo zpresnovat práci clovekanapr. pákové a kladkové mechanismy, bagry, nakladace,atd.rozvoj technologií ⇒ manipulátory obsazují celou raduprumyslových aplikací (presné, bezchybné, neúnavnénahrazení práce cloveka)
ve skladech: zakládací, trídící, prerovnávací manipulátoryna výrobních linkách: manipulátory typu„pick and place“v prumyslových procesech: presné broušení, svarování,leštení, lakování atd., aktivní tlumení vibracípruzkum nebezpecných, omezených, ci nedostupnýchprostormanipulátory v lékarství
M. Švejda predmet URM, prednáška c. 1

Robotika (príklady použití manipulátoru)
Paralelní Delta manipulátor „FlexPicker“ a svarovací roboty prooblouková svarování firmy ABB
M. Švejda predmet URM, prednáška c. 1

Robotika (príklady použití manipulátoru)
Multiredundantní paralelní manipulátor firmy OC Robotics proaplikace v omezených prostorech
M. Švejda predmet URM, prednáška c. 1

Robotika (príklady použití manipulátoru)
Operacní robot „da Vinci Surgical System“ (od roku 2005vlastní pražská nemocnice Na Homolce)
M. Švejda predmet URM, prednáška c. 1

Robotika (základní rozdelení robotu)
2 Humanoidní robotypodobné cloveku nejen vzhledem, ale i projevy inteligencekladen duraz na autonomii, reálné interakce s prostredím(kognitivní roboty)obor dnes vnímán jako špicka a jeden z hlavních cílurobotikyzaložené nejen na mechatronickém základu (vizmanipulátory), ale výrazne na disciplínách pocítacovéhovnímání, porozumení, rozpoznávání a rozhodováníhumanoidní roboty nejsou dále uvažovány v prubehuprednášek predmetu UMR
M. Švejda predmet URM, prednáška c. 1

Robotika (príklady použití humanoidních robotu)
Robot „BigDog“ a humanoidní robot „PetMan“ z produkceBostonDynamics
M. Švejda predmet URM, prednáška c. 1

Robotika (vymezení základních pojmu)
Pocet stupnu volnosti (DoF - Degrees of Freedom)Minimální pocet parametru (rotace, translace), který jednoznacnepopisuje polohu bodu nebo telesa v rovine ci prostoru(bod v rovine - 2DoF, v prostoru - 3 DoF, (tuhé teleso má v rovine 3 DoF, v prostoru 6DoF).
Obecná poloha telesa v prostoru je urcena jeho translací a rotacíTranslace - intuitivne zrejmá (souradnice x,y,z libovolného bodu telesa),rotace - nejcastejší reprezentace prostrednictvím matice rotace,Eulerových úhlu, kvaternionu, atd.
Základna manipulátoruPevná (nepohyblivá) cást manipulátoru - na které je definován pevný„svetový“ souradný systém.
Koncový efektor manipulátoru ⇒ zobecnené souradnice XPoslední cást resp. rameno manipulátoru, ke kterému jsou obvyklepripevnovány ruzné pracovní nástroje. Tato poloha je cílem rízení.
M. Švejda predmet URM, prednáška c. 1

Robotika (vymezení základních pojmu)
Klouby manipulátoruurceny poctem a typem stupnu volnosti
klouby typu P (prizmatický), R (rotacní), U (univerzální, kardanuv), S (sférický)
Kinematický retezecTvorí jej „kinematické dvojice“ - spojení dvou pevných teles (ramen)danou vazbou (kloub - omezují vzájemný pohyb ramen).Napr.: RRR, RPR (podtržení oznacuje aktivní kloub (aktuátor)).Aktuátory manipulátoruPohonné jednotky manipulátoru. Typické aktuátory tvorí rotacní pohony(rotacní elektromotory) a lineární (prímocaré) pohony(elektrohydraulické válce, lineární elektromotory). Klouby, kteréreprezentují aktuátory, nazýváme aktivními klouby ⇒ aktivní kloubovésouradnice Qa. Ostatní klouby pasivní ⇒ pasivní kloubovésouradnice Qp.
M. Švejda predmet URM, prednáška c. 1

Robotika (vymezení základních pojmu)
Domovská poloha manipulátoruPoloha koncového efektoru manipulátoru, pri které jsou jeho aktivníkloubové souradnice Qa nastaveny takovým zpusobem, že koncovýefektor manipulátoru zaujímá výchozí (domovskou) polohu.
Pracovní prostor manipulátoruMnožina všech X , které mohou být dosaženy pro dané omezujícípodmínky kladené na manipulátor (napr. maximální/minimálnívysunutí/natocení aktuátoru, omezení na pohyb pasivních kloubu,omezení zabranující prekrížení ci srážkám ramen manipulátoru,omezení na kvalitu pracovního prostoru).
Prímá kinematická úloha (PKÚ)Reprezentovaná obecne nelineární transformací X = G(Q). Tedyproblém nalezení zobecnených souradnic X pro dané hodnotysouradnic kloubových Q.
Zpetná/inverzní kinematická úloha (IKÚ)Reprezentovaná obecne inverzní nelineární transformací Q = G−1(X ).Jedná se tedy o problém nalezení kloubových souradnic Q pro danéhodnoty souradnic zobecnených X .
M. Švejda predmet URM, prednáška c. 1

Robotika (vymezení základních pojmu)
Presnost manipulátoruJe dána odchylkou požadované polohy a skutecné polohy(z referencního/kalibracního meridla) koncového efektoru.
Opakovatelnost manipulátoruLze chápat jako maximální rozdíl mezi skutecnými polohami koncovéhoefektoru získanými jeho presunem do jedné požadované polohyz ruzných poloh pocátecních.
Redundantní manipulátory
Pocet nezávislých aktivních kloubových souradnic (aktuátoru) jevetší než pocet DoF koncového efektoru manipulátoru ⇒preurcená mechanická soustava (napr. vyvarování singulárnímpolohám x nebezpecí destrukce nevhodným rízením)Pocet nezávislých aktivních kloubových souradnic i DoFkoncového efektoru je shodný, ALE jeden ci více DoF koncovéhoefektoru nerídíme, napr. tycová elektroda svarovacího robotu(orientace v ose elektrody) - možno využít redundanci koptimalizaci pohybu robotu
M. Švejda predmet URM, prednáška c. 1
Robotika (delení manipulátoru dle mechanickékonstrukce)
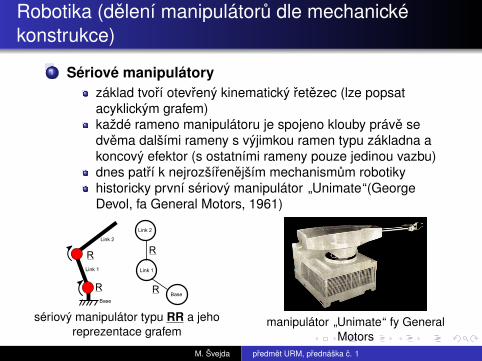
1 Sériové manipulátoryzáklad tvorí otevrený kinematický retezec (lze popsatacyklickým grafem)každé rameno manipulátoru je spojeno klouby práve sedvema dalšími rameny s výjimkou ramen typu základna akoncový efektor (s ostatními rameny pouze jedinou vazbu)dnes patrí k nejrozšírenejším mechanismum robotikyhistoricky první sériový manipulátor „Unimate“(GeorgeDevol, fa General Motors, 1961)
sériový manipulátor typu RR a jehoreprezentace grafem
manipulátor „Unimate“ fy GeneralMotors
M. Švejda predmet URM, prednáška c. 1

Robotika (delení manipulátoru dle mechanickékonstrukce)
2 Paralelní manipulátoryzáklad tvorí uzavrený kinematický retezec (lze popsatcyklickým grafem)koncový efektor je spojen se základnou dvema ci víceotevrenými kinematickými retezci (sériovými manipulátory)puvodne spíše „akademická“ záležitost, dnes nasazování vprumyslové praxiprvní zmínky již v 1. polovine 20. stoletív roce 1931 nechal James Gwinnett patentovat mobilníplatformu pro zábavní prumysl
paralelní manipulátor s kin. retezci RRa jeho reprezentace grafem paralelní scara robot
M. Švejda predmet URM, prednáška c. 1

Robotika (príklady paralelních manipulátoru 1/3)
Pravdepodobne první paralelní manipulátor Jamese Gwinnetta(Byl opravdu prvním paralelním manipulátorem? Byl skutecne
sestrojen?)
M. Švejda predmet URM, prednáška c. 1

Robotika (príklady paralelních manipulátoru 2/3)Stewartova platforma
nejznámejší paralelní kinematickouarchitekturou
objev bezpochyby náleží Ericu Goughovi(automobilový inženýr firmy Dunlop)
Gough v roce 1954 predstavil paralelníplatformu pro testování pneumatikletadlových podvozku pri variabilnímzatížení
v roce 1965 predstavil D. Stewart nakonferenci UK Institution of MechanicalEngineers paralelní architekturuleteckého simulátoru
presto, že Stewartuv vynález byl odlišnýod Goughova, dnes se Goughuv vynálezoznacuje casto jako Stewartovaplatforma ci Stewart/Goughovaplatforma
„Universal Tyre-TestingMachine“
M. Švejda predmet URM, prednáška c. 1

Robotika (príklady paralelních manipulátoru 3/3)
Puvodní Stewartuv paralelní letecký simulátor (diametrálneodlišný od Goughova vynálezu, nicméne...,)
M. Švejda predmet URM, prednáška c. 1
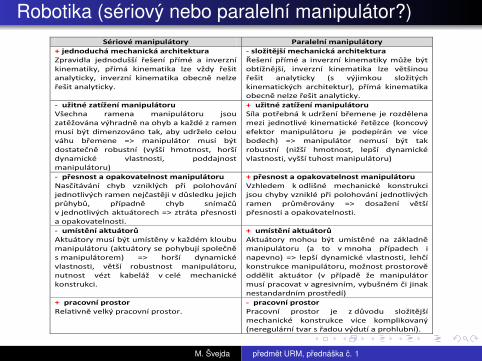
Robotika (sériový nebo paralelní manipulátor?)Sériové manipulátory Paralelní manipulátory
+ jednoduchá mechanická architektura Zpravidla jednodušší řešení přímé a inverzní kinematiky, přímá kinematika lze vždy řešit analyticky, inverzní kinematika obecně nelze řešit analyticky.
- složitější mechanická architektura Řešení přímé a inverzní kinematiky může být obtížnější, inverzní kinematika lze většinou řešit analyticky (s výjimkou složitých kinematických architektur), přímá kinematika obecně nelze řešit analyticky.
- užitné zatížení manipulátoru Všechna ramena manipulátoru jsou zatěžována výhradně na ohyb a každé z ramen musí být dimenzováno tak, aby udrželo celou váhu břemene => manipulátor musí být dostatečně robustní (vyšší hmotnost, horší dynamické vlastnosti, poddajnost manipulátoru)
+ užitné zatížení manipulátoru Síla potřebná k udržení břemene je rozdělena mezi jednotlivé kinematické řetězce (koncový efektor manipulátoru je podepírán ve více bodech) => manipulátor nemusí být tak robustní (nižší hmotnost, lepší dynamické vlastnosti, vyšší tuhost manipulátoru)
- přesnost a opakovatelnost manipulátoru Nasčítávání chyb vzniklých při polohování jednotlivých ramen nejčastěji v důsledku jejich průhybů, případně chyb snímačů v jednotlivých aktuátorech => ztráta přesnosti a opakovatelnosti.
+ přesnost a opakovatelnost manipulátoru Vzhledem k odlišné mechanické konstrukci jsou chyby vzniklé při polohování jednotlivých ramen průměrovány => dosažení větší přesnosti a opakovatelnosti.
- umístění aktuátorů Aktuátory musí být umístěny v každém kloubu manipulátoru (aktuátory se pohybují společně s manipulátorem) => horší dynamické vlastnosti, větší robustnost manipulátoru, nutnost vézt kabeláž v celé mechanické konstrukci.
+ umístění aktuátorů Aktuátory mohou být umístěné na základně manipulátoru (a to v mnoha případech i napevno) => lepší dynamické vlastnosti, lehčí konstrukce manipulátoru, možnost prostorově oddělit aktuátor (v případě že manipulátor musí pracovat v agresivním, vybušném či jinak nestandardním prostředí)
+ pracovní prostor Relativně velký pracovní prostor.
- pracovní prostor Pracovní prostor je z důvodu složitější mechanické konstrukce více komplikovaný (neregulární tvar s řadou výdutí a prohlubní).
M. Švejda predmet URM, prednáška c. 1

Dekuji za pozornost.
Dotazy?
M. Švejda predmet URM, prednáška c. 1





























