Embed Size (px)
Citation preview

UŽIVATELSKÁ PŘÍRUČKA
Čeština
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:44 AM Page 1

DŮLEŽITÁ POZNÁMKA
Mějte prosím na paměti, že trasa infračerveného paprsku musí zůstat za všech okolností bez překážek!
Jinak může v detektoru dojít ke spuštění požárního nebo chybového signálu.
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:44 AM Page 2

Obsah
Instalace4 Všeobecné informace5 Montáž výrobku6 Zapojení
Uvedení do provozu7 Připojení napájení a vložení přístupového kódu8 Volba režimu napájení a vzdálenost9 Směrování LASERu10 „Automatické“ vyrovnání a „Nastavení“ 0/100 (Kalibrace)
Použití11 Nastavení a závěrečné zkoušky12 Čištění, ruční provedení požárních a chybových zkoušek
Odstraňování problémů13 Chybové kódy14 LASER není viditelný15 Výchozí pozice
Systémové informace16 Uspořádání ikon displeje17 Stavové indikátory18 Uspořádání uživatelské nabídky20 Uspořádání nabídky Engineering21 Uspořádání nabídky nastavení detektoru22 Uspořádání nabídky nastavení systémové řídicí jednotky23 Provozní parametry a rozměry24 Homologace a informace vztahující se k oblasti
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:44 AM Page 3

Všeobecné informace
4
Instalace
• Ověřte si rozestup paprsku vzhledem k místnímpředpisům
• Paprsek nasměrujte co možná nejvýše, ale s minimální vzdáleností 0,5 m mezi detektorem a stropem
• Detektor a reflektor připevněte navzájem proti sobě• Detektor nesměrujte tam, kde mohou do jeho trasy
vstoupit osoby nebo předměty
18–50 m = x1
50–100 m = x4
8–18 m = x1 Použití šablony prokrátký dosah
50 cm
8 – 100 m
50 cm
Zajistěte, aby byla mezidetektorem a reflektorempřímá viditelnost
Montáž na pevný povrch (nosná stěna nebo vazník)
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 4

Montáž výrobku
5
Inst
alac
e
Instalace
Indikátor LED musí směřovat dolů
Možnosti orientace zapojenídetektoru
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 5

Zapojení
6
Instalace
*Požární odpor – o hodnoty požárního odporupožádejte výrobce požárního řídicího panelu. Některé moduly rozhraní zóny a přepínače požárníodpor nepotřebují – odpor nahraďte spojením nakrátko.Další informace vyhledejte na přiloženém CD.
Zapojení pro všechny ostatní paprsky (vícepaprskové systémy) Zapojení pro jeden nebo poslední paprsek v zóně.
DO DETEKTORU
ZÓNA –ZÓNA +
NAPÁJENÍ –NAPÁJENÍ +
ZEM/STÍNĚNÍ
DO DETEKTORU
• Pro každou hlavici detektoru VŽDY použijtesamostatný stíněný dvoužilový kabel
• Zakončovací prvek („EOL“) dodává výrobce požárního řídicího panelu
• Zkontrolujte si připojení Fire a Fault (požár a chyba) napožárním panelu Požární panel
Aby došlo ke zrušeníblokovaného stavupožáru, připojte nakontakt „Ext Reset“napětí 5 V až 40 V
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 6

7
Připojení napájení a vložení přístupového kóduUvedení do provozu
1. Připojte napájení
Poznámka – nasystému uvedeném doprovozu se zobrazí:
2. Zadejte přístupový kód sloužící k vyvolání nabídky Access EngineeringStiskem vyvolejte stránku Pass Code (přístupový kód):
2 sekundy
40 sekund
Uve
den
í d
op
rovo
zu
• Výchozí přístupový kód: 1 2 3 4• Změna číslice• Pohyb mezi číslicemi• Přijmout• Při vložení nesprávného přístupového kódu se zobrazení
vrátí na stránku sloužící k zadávání kódu• Po třech nesprávných pokusech se přístup na tři minuty
zablokuje
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 7

Volba režimu napájení a vzdálenosti
8
Uvedení do provozu
• Veškeré funkce lze provádět v režimu „Lo A“ (10 mA) (výchozí režim)
• Rychlejší pohyb paprsku v režimu Auto-Align (automatickévyrovnání) a Laser Targeting (Směrování laseru) aktivujtevolbou „Hi A“ (50 mA)
• Po instalaci vraťte nastavení zpět na „Lo A“
• Vyberte 8–50 m (výchozí) nebo 100 m
3. Volba režimu napájení 4. Volba vzdálenosti mezi detektorem a reflektorem
Pohyb v nabídce
1. K pohybu mezi ikonami
v nabídce Engineering a ke
zvýraznění zobrazené ikony
použijte tlačítka
3. K přesunu na požadovanoupoložku použijte
2. K výběru použijte
4. Ke změně výběru
použijte
5. K potvrzení použijte
Ke zrušení použijte
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 8

Směrování LASERu
9
Uvedení do provozu
LASEROVÉ VYZAŘOVÁNÍ –CHRAŇTE SE PŘED PŘÍMÝMPŮSOBENÍM PAPRSKŮ
VÝSTUPNÍ VÝKON < 5 mW
LASER TŘÍDY IIIa
Vlnová délka 630 – 680 nm
VÝSTRAHA
5. Směrování LASERu
Uve
den
í d
op
rovo
zu
V tomto režimu systém vytvoří chybový signál (Fault)
LASER slouží k vyrovnání detektoru s reflektorem. Jedná se o nástroj pouze k přibližnému vyrovnání. Po provedeníautomatického vyrovnání nemusí být LASER nasměrovánpřímo na reflektor.• K maximálnímu možnému přiblížení LASERu k reflektoru
použijte tlačítka • Jeden stisk kurzorového tlačítka vyvolá jeden pohyb
hlavice detektoru• Stiskem nebo vypněte LASER a vraťte se do
nabídky Settings (nastavení)• Pokud není LASER viditelný, podívejte se do kapitoly
Odstraňování problémů na straně 14 uživatelské příručky
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 9

Uvedení doprovozu „Automatické“ vyrovnání a „Nastavení“ 0/100 (Kalibrace)
10
7. „Nastavení“ 0/100 (Kalibrace)
• Chcete-li infračervenýpaprsek vyrovnatautomaticky, použijte funkci „Auto“
• Během vyrovnání se zobrazí intenzita signálu
6. „Automatické“ vyrovnání
LoA: 18 minutHiA: 15 minut
• Pokud je zobrazeno „Set“, stiskněte • Pokud se zobrazí „S-00“, zakryjte reflektor neodrazným
materiálem. Ponechte jej přikrytý a poté stiskněte • Pokud se zobrazí „S-01“, reflektor odkryjte.
Ponechte jej odkrytý a poté stiskněte
8. Systém je vyrovnán• Doporučuje se systém přepnout zpět do režimu „Lo A“• Zelený indikátor LED na detektoru každých 10 sekund
zabliká a intenzita signálu by měla být mezi 99 % a 101 %• Výchozí hodnoty: 35 % prahová úroveň požáru, 10
sekundové zpoždění pro Fire a Fault (požár a chyba), režim Non-Latching (bez blokování)
• Podrobnosti týkající se změny nastavení a testu stavuFire a Fault naleznete v uživatelské příručce na straně 11–12
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 10

Použití Nastavení a závěrečné zkoušky
11
Po
uži
tí
Prahová úroveň požáruJak změnit prahovouúroveň, při níž budedetektor detekovat požár
Zpoždění 1(Požár)
Stránka pro potvrzeníDetektor odešle signál Fire,systémová řídicí jednotkazůstane v režimu Normal.Chcete-li skončit bezprovedení zkoušky,stiskněte
Stránka Fire (Požár)Signály systémové řídicí jednotky „Fire“ na požární řídicí panel Chcete-li skončit , stiskněte nebo
Zpoždění Požár / ChybaJak změnit zpoždění,které používá systémovářídicí jednotka předsignalizací požáru nebochyby do požárníhořídicího panelu
Zpoždění 2(Chyba)
Požární zkouškaJak provést požárnízkoušku ze systémovéřídicí jednotky a prověřitzapojení do požárníhořídicího panelu
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 11

Použití Čištění systému, ruční provedení požárních a chybových zkoušek
12
Čištění systému
Systém provede změnou kompenzační úrovněautomatickou kompenzaci nashromážděného prachu.
Doporučuje se však pravidelné čištěné čočekdetektoru a povrchu reflektoru měkkou tkaninounepouštící chloupky.
Pokud bude hodnota úrovně kompenzace po několikdní vyšší než 130, znamená to, že je nutno provéstčištění.
Před zahájením čištění by měl být systém odpojen odpožárního řídicího panelu.
Po čištění si ověřte, zda systém pracuje normálně:
Pokud je intenzita signálu mezi 90 % a 110 %– nechte systém kompenzovat zpět na 100 %
(to by nemělo trvat déle než 12 hodin)
Pokud je intenzita signálu vyšší než 110 % – omezte úroveň kompenzace, dokud nebude
intenzita signálu mezi 90–110 % a vyčkejte, aby sesystém kompenzoval zpět na 100 %
Pokud je intenzita signálu nižší než 90 % – proveďte funkce LASER Targeting (Směrování
LASERu), Auto-Align (automatické vyrovnání) a Set(Nastavení).
Ruční provedení požárních a chybových zkoušek
Po instalaci nebo čištění se doporučuje ručníprovedení požární a chybové zkoušky:
Požární zkouška: Reflektor pomalu přikrývejte, abyjeho přikrytí trvalo déle než 2 sekundy. Systémovářídicí jednotka odešle do požárního řídicího panelusignál Fire (Požár).
Chybová zkouška: Během 2 sekund reflektor zcelapřikryjte. Systémová řídicí jednotka odešle zpět dopožárního řídicího panelu signál Fault (Chyba).
Jak změnit úroveň kompenzace:
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 12

Odstraňováníproblémů Chybové kódy
13
Detektor nebyl nalezen
Systémová řídicí jednotkanenalezla detektor. Zobrazuje se také během zapínání.
• Vyčkejte 45 sekund na zapnutísystému
• Zkontrolujte zapojení mezisystémovou řídicí jednotkou a detektorem (napětí na detektoruby mělo být v rozsahu 11 – 13 V)
Nenulová úroveň kompenzace
Při volbě „Set“ se musíkompenzacerovnat nule
• Opakované vyrovnání paprskupomocí automatickéhovyrovnání
Intenzita signálu je mimo rozsah.
Po automatickém vyrovnání jeintenzita signálu je příliš nízká nebopříliš vysoká.
• Ověřte si, zda byla nastavena správná vzdálenost
• Ověřte si, zda byl použit správný typ reflektoru
• Ověřte si, zde je k reflektoru přímá viditelnost
• Opakované vyrovnání paprskupomocí funkce LASER a automatického vyrovnání
Reflektor nebyl nalezen.
Detektor nebyl vyrovnán s reflektorem
• Ověřte si, zda byla nastavenasprávná vzdálenost
• Ověřte si, zda byl použitsprávný typ reflektoru
• Ověřte si, zde je k reflektorupřímá viditelnost
• Opakované vyrovnání paprskupomocí funkce LASER a automatické vyrovnání
Automatické vyrovnání selhalo
• Ověřte si, zda je mezireflektorem a střešní konstrukcínastavena správná vzdálenost
• Ověřte si, zde je k reflektorupřímá viditelnost
• Opakované vyrovnání detektorupomocí automatickéhovyrovnání
Během „S-00“ v „Set“ nelzenastavit nulu
Reflektor nebyl zakryt nebo nebyl detektor s reflektorem vyrovnán.
• Ověřte si, zda byl reflektor zcelazakryt neodrazným materiálem
• Opakované vyrovnání detektorupomocí automatického vyrovnání
Během „S-01“ v „Set“ neník dispozici žádný signál
Reflektor nebyl během „S-01“ odkrytý.
• Ověřte si, zda byl reflektorběhem volby „S-01“ odkrytý
Během „Centrální“ fáze režimuvyrovnání došlo k selhání
Detektor je příliš daleko od středu reflektoru
• Ověřte si, zde je k reflektorupřímá viditelnost
• Ověřte si, zda je mezi trasoupaprsku a střešní konstrukcísprávná vzdálenost
Od
stra
ňo
ván
íp
rob
lém
ů
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 13

Pokud nelze vidět LASER kvůli prostředí, kde jeprovedena instalace (například reflektor nelze vidětze systémové řídicí jednotky nebo se jedná o prostředí s vysokou intenzitou osvětlení), potépoužijte „Ruční“ vyrovnání. Tato možnost zobrazíhodnotu intenzity signálu vráceného detektorem a uživateli umožní pohybovat paprskem
1. Spusťte „Auto-Align“ (automatické vyrovnání) a po dvou sekundách jej ukončete stiskem (tímtozpůsobem dojde k maximalizaci infračervenéhovýkonu).
2. Vyberte „Hand-Align“ (ruční vyrovnání)3. Tlačítka použijte k navedení paprsku,
dokud nebude intenzita signálu vyšší než 800. Na žádném tlačítku není funkce automatickéhoopakování. Chcete-li motorem pohnout jakýmkolidaným směrem, více než jednou, stiskněte tlačítkoněkolikrát.
4. Zakryjte reflektor. Pokud intenzita signálu neklesnevíce než o polovinu, paprsek není s reflektoremvyrovnán. Proto opakujte krok 3
5. Proveďte „Automatické“ vyrovnání a poténastavení „Set“
Odstraňování problémů LASER není viditelný
14
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 14

Odstraňováníproblémů Výchozí pozice (Home Position)
15
Od
stra
ňo
ván
íp
rob
lém
ů
Pokud není známo, kam je laser nasměrován,použijte funkciHome Position, která slouží k automatickému navedeníinfračerveného paprsku do jeho přibližného středu pohybovéhorozsahu.
• Funkci ukončíte stiskem tlačítka nebo • Dokončení potrvá až 15 minut• Po dokončení se obnoví zobrazení nabídky Engineering
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 15

Displej a indikátory Uspořádání ikon displeje
16
Přidržet / Vynulovat
Stupně
Sekundy
Intenzita signálu
Příkaz uživatele
Úroveň kompenzaceMetry
Stopy
Požár
Intenzita vysílanéhosignálu
Nevyužívá se
Intenzita přijatéhosignálu% / V
Nastavenísystémové
řídicí jednotkyPomocné programy
Požárnízkouška
Požár / Chyba Zpoždění
Prahováúroveň požáru
Vyrovnání paprsku
SměrováníLASERu
Nastavení detektoru
Nastavenívýchozí pozice(Home Position)
Indikátor
Uzamknutí / odemknutísystému
Varování
V provozu
Číslo detektoru
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 16
Displej a indikátory Stavové indikátory detektoru a systémové řídicí jednotky
17
Info
rmac
e
12 3 4
5
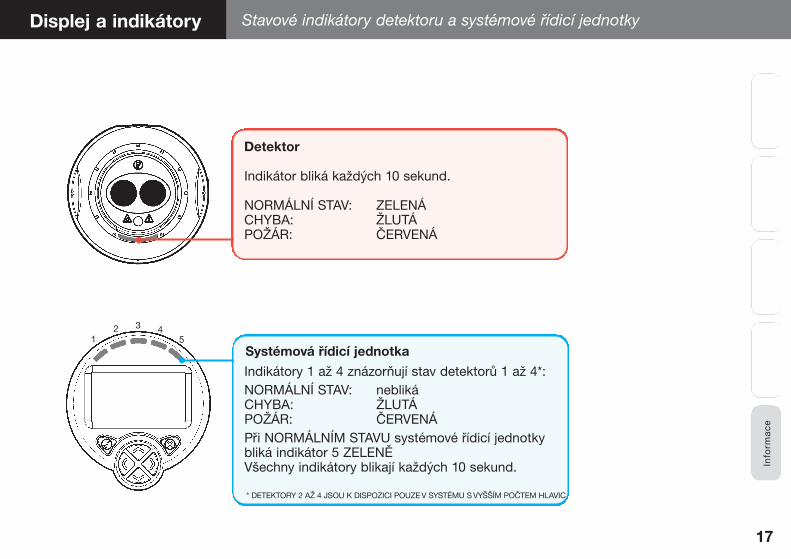
Detektor
Indikátor bliká každých 10 sekund.
NORMÁLNÍ STAV: ZELENÁCHYBA: ŽLUTÁPOŽÁR: ČERVENÁ
Systémová řídicí jednotkaIndikátory 1 až 4 znázorňují stav detektorů 1 až 4*:NORMÁLNÍ STAV: neblikáCHYBA: ŽLUTÁPOŽÁR: ČERVENÁPři NORMÁLNÍM STAVU systémové řídicí jednotkybliká indikátor 5 ZELENĚVšechny indikátory blikají každých 10 sekund.
* DETEKTORY 2 AŽ 4 JSOU K DISPOZICI POUZE V SYSTÉMU S VYŠŠÍM POČTEM HLAVIC
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 17

Uspořádání nabídek Uživatelská nabídka
18
Parametry řídicí jednotky
• Tlačítkem zadejte v této nabídce přístupový kód
• Stiskem přepněte systém do režimu spánku
Parametry detektoru
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 18

Uspořádání nabídek Uživatelská nabídka – Popisy
19
Info
rmac
e
Parametry řídicí jednotky
Parametry detektoru
Režim napájení„Hi A“ nebo „Lo A“
Systémová řídicíjednotka Stav
Systémová řídicíjednotka
Verze softwaru
Procentuální úroveň přijatého signálu
Úroveň kompenzace Prahová úroveň požáru Zpoždění – Požár
Verze softwarudetektoru
Stav detektoru Teplota
stupně Celsia neboFahrenheita
Vzdálenost
8–50 m nebo 50–100 m
Zpoždění – Porucha
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 19

• Vyvolání nabídky Access Engineering je podmíněno zadáním přístupového kódu
• K pohybu v nabídce slouží tlačítka pohybující kurzorem.
• K volbě položek slouží
• Stiskem se tato nabídka ukončí a systém se vrátí do „uzamčeného stavu“
Uspořádání nabídek Nabídka Engineering
20
Nastavení řídicíjednotky
Výchozí pozice Nastavení detektoru Směrování LASERu Vyrovnání paprsku Prahová úroveň požáru
Pomocné programy Požární zkouškaZpoždění Požár /
Chyba
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 20

Uspořádání nabídek Nastavení detektoru
21
* K DISPOZICI POUZE V SYSTÉMU S VĚTŠÍM POČTEM DETEKTORŮ ** UPOZORNĚNÍ: POUZE K TECHNICKÉMU VYUŽITÍ. ZMĚNA MŮŽE ZPŮSOBIT PORUCHU
Nastavit vysílací výkon **Nastavit úroveňkompenzace ** Nastavit přijímací zisk ** Nastavit nulu / 100 %
Automatická optimalizace motoru Pohyb Zapnout / Vypnout
Nastavit stav Požár –Přidržet / Vynulovat
Naszavitvzdálenost
Nastavit číslodetektoru
Info
rmac
e
Výchozí stav je Non-Latched (bez přidržení)
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 21

Uspořádání nabídek Nastavení systémové řídicí jednotky
22
Změna přístupového kódu
Režim napájení Měřicí jednotky
• Měřicí jednotkyPřepínání mezi „metrickými“ a „imperiálními“ jednotkami• Změna přístupového kóduK vyvolání každé číslice použijte tlačítka Ke změně číslice použijte Tlačítkem uložte nový přístupový kód a vraťte se do nabídky nastaveníTlačítkem zrušte změnu a vraťte se do nabídky Engineering
Při změně přístupovéhokódu postupujte opatrně.V případě ztráty kódunelze jednotku odblokovata musí být odeslának výrobci. Na tuto situacise nevztahuje záruka.
UPOZORNĚNÍ
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 22

Systémové informace Provozní parametry a rozměry
23
Rozměry Šířka, palce (mm) Výška, palce (mm) Hloubka, palce (mm) Hmotnost, lb (kg)
Parametr Popis VýchozíParametr HodnotaPřístupový kód Přístupový kód požadovaný k vyvolání nabídky Engineering 1 2 3 4
Režim napájení
„Hi A“: Systém bude pracovat při konstantním proudovém odběru 50 mA„Lo A“: Systém bude pracovat při konstantním proudovémodběru 10 mA
„Lo A“
Úroveňkompenzace
Rozsah –50 až +205. Úroveň zesílení použitá ke kompenzaci nashromážděného prachu a pohybu budovy Automatická optimalizace je zahájena při úrovni 75
0
Vysílací výkonRozsah 50 až 4095 Indikuje výkon optického výstupu. Nastavena automaticky prostřednictvím Auto-Align
-
Přijímací ziskRozsah 1 až 255 Indikuje úroveň zesílení příjímačeNastavena automaticky prostřednictvím Auto-Align
-
Prahová úroveňpožáru
Rozsah 10 % až 60 %. Nastavuje úroveň zastínění vyžadovanou pro detektor, aby vyslal signál Požár
35 %
Zpoždění (Požár)Rozsah 2 s až 30 s. Určuje časový interval, který systémpotřebuje, aby byl pod prahovou úrovní před signalizací požáru
10 sekund
Zpoždění (Chyba)
Rozsah 2 s až 30 s. Určuje časový interval, který systémpotřebuje, aby byl pod prahovou úrovní před signalizacíporuchyPamatujte si, že úroveň signálu musí během dvou sekundpoklesnout pod <=13 %
10 sekund
Vzdálenost8–50 m nebo 50–100 m Nastavení vzdálenosti mezi detektorem a reflektorem Ovlivňuje výchozí vysílací výkon při zahájení automatického vyrovnání
8–50 m
AutomatickáoptimalizaceZapnuto/Vypnuto
Vypíná či zapíná automatickou optimalizaci (funkciautomatického pohybu paprsku) Zapnuto
S přidržením/bez přidržení
Určuje, zda systém přidrží stav Požár nebo se automaticky vynulujePoruchy jsou vždy bez přidržení.
Bez přidržení
Systémová řídicí jednotka, včetněpodstavce
7,9 (200) 9,3 (235) 2,8 (71) 2,0 (0,9)
Detektor, včetně podstavce prosnadnou montáž
5,3 (135) 5,3 (135) 5,3 (135) 1,1 (0,5)
Univerzální držák 5,3 (135) 5,3 (135) 2,8 (71) 0,4 (0,2)
Reflektor (jeden) 3,9 (100) 3,9 (100) 0,4 (10) 0,2 (0,1)
Ochranný plášť Ø5,4 (Ø136) 6,2 (157) - 0,3 (0,13)
Provozní napětí 14–28 V ss.
Pracovní proud – režim s nízkým příkonem 8–12 mA
Pracovní proud – režim s nízkým příkonem 48–52 mA
Rozsah prahové úrovně požáru 0,45–3,98 dB10–60 %
Zpoždění (Požár) 2–30 s
Zpoždění (Chyba) 2–30 s
Pracovní vzdálenost mezi detektorem a reflektorem 8–100 m
Maximální úhlová chyba detektoru ± 0,3 stupně
Maximální úhlová chyba reflektoru ± 5 stupňů
Maximální moment hybnosti hlavice detektoru ± 3,5 stupně
Optická vlnová délka 850 nm
Prahová úroveň chyby při rychlém zakrytí 87 %
Provozní teplota (schválení UL) 0–+37,8 stupňů Celsia
Provozní teplota (schválení EN54-12) -10–+55 stupňů Celsia
Skladovací teplota -40–+85 stupňů Celsia
Relativní vlhkost (nekondenzující) 93 %
Stupeň krytí IP54
Napětí kontaktu relé 30 V ss.
Proud kontaktu relé 100 mA
Maximální délka kabelu (z řídicí jednotky do detektoru) 100 m
Průřez kabelu 24–14 AWG0,5–1,5 mm
Úroveň hořlavosti krytu UL94 V0
Info
rmac
e
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 23

Homologace Informace vztahující se k oblasti
24
Informace týkající se evropské homologace
Vyhovuje normě EN54-12 pro úrovně citlivosti mezi 25 %a 35 % s maximálním zpožděním požáru 20 sekund. Norma EN54-12 vyžaduje nasazení ochranného pláště.
Informace týkající se homologace UL (zkušebnaUnderwriters Laboratories)
Číslo souboru UL: S3417
0832
Fire Fighting Enterprises Ltd, 9 Hunting Gate, Hitchin,SG4 0TJ, Velká Británie
070832-CPD-0565
EN54-12Detektor trasy využívající optického paprsku
Požární bezpečnostDokumentace: viz dokument 0044-003
Vzdálenost mezi detektorem a reflektorem
Rozsah prahovéúrovně požáru
8–10 m (26,2–32,8 stopy) 10–18 %10–15 m (32,8–49,2 stopy) 15–25 %15–22 m (49,2–72,2 stopy) 15–35 %22–40 m (72,2–131,2 stopy) 25–50 %40–60 m (131,2–196,8 stopy) 35–50 %60–100 m (196,8–328,1 stopy) 50 %
Všechny instalace musí odpovídat standarduNFPA72
Číslo dokumentu: 0044-003-05
User Guide Adaption_CZ.qxp:User Guide Adaption.qxd 2008.8.25 9:45 AM Page 24
























![VC-7104-Operation_Manual c20030605 [202]](https://img.dokumen.tips/doc/110x75/55cf9946550346d0339c8ada/vc-7104-operationmanual-c20030605-202.jpg)




