Embed Size (px)
Citation preview

1
ارتعاشات
بعامن
تئوری ارتعاشات و کاربرد آن در مهندسی -1
انتشارات دانشگاه تهران –دکتر منصور نیکخواه بهرامی
2 - Vibration Theory with Applications - Thomson W.T. and M.D.Dahleh
3 - Mechanical Vibrations - Rao, S.S
سرفصل درس
تعاریف و مفاهیم پایه
آزادي درجه یك هايسیستم زادآ ارتعاشات
اجباري هارمونیك ارتعاش
ارتعاش گذرا
هاي دو درجه آزاديسیستم
هاي چند درجه آزاديسیستم

2
فصل اول
حرکت نوسانی
شود، یعنی ارتعاشات یک پدیده ها مربوط میمطالعه ارتعاشات به حرکت نوسانی اجسام و نیروهای وابسته به آن
دینامیکی است.
باشند قادر به ارتعاش هستند.سام دارای جرم و خاصیت االستیسیته )کشسانی( تمامی اج
در بیشتر مواقع ارتعاشات زاییده ناخواسته یک عملکرد مفید است نطیر شفت تجهیزات دوار و الستیک خودرو
مکانیکیهای شود نظیر سازهای موسیقی، ویبراتورها و الکدر برخی موارد ارتعاشات به صورت عمدی ایجاد می
ارتعاشات عمدی )مفید( ارتعاشات ناخواسته )مزاحم(
های ارتعاشی بر حسب مدل ریاضیطبقه بندی سیستم
های هستند که تعداد درجه آزادی معین دارند.سیستم مدل ناپیوسته: -1
نهایت هستند.های هستند که دارای درجه آزادی بیسیستم مدل پیوسته: -2
تم یک درجه آزادی )مدل ناپیوسته(سیس

3
سیستم دو درجه آزادی )مدل ناپیوسته(
سیستم سه درجه آزادی )مدل ناپیوسته(
مدل پیوسته )بی نهایت درجه آزادی(

4
درجه آزادی
تعداد مختصات مستقل برای توصیف حرکت یک سیستم درجه آزادی نام دارد.
آزادی دارد هر نقطه مادی در فضا سه درجه(𝑥, 𝑦𝑧)
جسم صلب در فضا شش درجه آزادی دارد(𝑥, 𝑦, 𝑧, 𝜃𝑥, 𝜃𝑦 , 𝜃𝑧)
هاهای ارتعاشی بر اساس رفتار آنطبقه بندی سیستم
اگر معادله دیفرانسیل سیستم خطی باشد یعنی اگر هر ترم در معادله دیفرانسیل حرکت فقط های خطی:سیستم -1
آن از توان اول باشد سیستم خطی است. شامل تابع و یا مشتقات
�̈� +𝑘
𝑚𝑥 = 0
نهی )سوپرپوزیشن( است. یعنی پاسخ حاصل سیستمی های خطی پیروی از اصل برهمهای مهم سیستماز ویژگی
ها به تنهایی.های ایجاد شده توسط هر یک از محرکبه خاطر ورود همزمان دو محرک عبارتست از ترکیب پاسخ
هایی که متغیر تابعی غیرخطی باشد، سیستم غیرخطی است.در سیستم یرخطی:های غسیستم -2
بندی عمومی ارتعاشاتطبقه
کند و نیروهای سیستم در اثر اعمال نیروهای ذاتی و الینفک خود تحت یک تحریک اولیه نوسان می ارتعاش آزاد: -1
خارجی حضور نداشته باشند.
شود.نس طبیعی خود منتشر میسیستم تحت ارتعاش آزاد با یک یا چند فرکا
پذیرد.ارتعاشی است که تحت تاثیر نیروهای خارجی صورت می ارتعاش اجباری: -2

5
F(t)ارتعاش اجباری تحت نیروی خارجی
حالت تشدید های طبیعی سیستم منطبق شوداگر در ارتعاش اجباری فرکانس نیروی محرک بر یکی از فرکانس
ها و بال های عظیم نظیر پلتواند سبب شکست سازهعنی نوسانی با دامنه بزرگ که میافتد، ی)رزونانس( اتفاق می
هواپیما شود.
در اثر تشدید ناشی از نیروی باد Tacoma – Narrowتخریب پل
ارتعاشات میرا و نامیرا
شود و اگر انرژی بدین یرا گفته میاگر انرژی در اثر اصطکاک و یا سایر نیروهای مقاوم حین نوسان تلف نشود بدان ارتعاش نام
شود.صورت تلف شده و تحلیل یابد بدان ارتعاش میرا گفته می

6
حرکت هارمونیک
حرکت گردد بدان تکرار می τحرکت نوسانی ممکن است به طور منظم تکرار شود. وقتی این حرکت در فواصل زمانی یکسان شود.گفته می متناوب )پریودیک(
𝑥(𝑡) = 𝑥(𝑡 + 𝜏)
𝜏 زمان تکرار
𝑓 =1𝜏
تعداد نوسان در یک ثانیه ←فرکانس )بسامد( تکرار
شود که از یک فنر سبک است که به وسیله حرکت یک جرم توصیف می حرکت هارمونیکترین فرم حرکت متناوب ساده
آویزان شده است.
هارمونیک ساده – 9شکل
𝑥 = 𝐴 sin𝜔𝑡
𝐴 دامنه نوسان
𝜔 ایسرعت زاویه
𝜔 =2𝜋𝜏= 2𝜋𝑓
𝜔 گردد.ای نیز اطالق میشود و بدان فرکانس دایرهگیری میمعموالً بر حسب رادیان بر ثانیه اندازه
ای با سرعت ثابتحرکت هارمونیک به صورت حرکت دایره – 10شکل
�̇� = 𝐴𝜔 𝑐𝑜𝑠 𝜔𝑡 = 𝐴𝜔 sin (𝜔𝑡 +𝜋
2) �̈� = −𝐴𝜔2 𝑠𝑖𝑛 𝜔𝑡 = 𝐴𝜔2 sin (𝜔𝑡 + 𝜋)
.در حرکت هارمونیک، سرعت و شتاب نیز هارمونیک با همان فرکانس اصلی هستند
سرعت به اندازه𝜋 رادیان جلوتر از تغییر مکان است. 𝜋و شتاب به اندازه ⁄2
�̈� = −𝜔2𝑥

7
جابجایی، سرعت و شتاب حرکت هارمونیک ساده – 11شکل
حرکت متناوب )پریودیک(سری ها بیان نمود که بدان ها و کسینوستوان به وسیله یک سری از سینوسیه نشان داد که هر حرکت متناوب را میفور
شود.گفته می فوریه
:که در آن
𝑎0 =2𝜏∫ 𝑥(𝑡) 𝑑𝑡𝜏 2⁄
−𝜏 2⁄=𝜔
𝜋∫ 𝑥(𝑡) 𝑑𝑡𝜋 𝜔⁄
−𝜋 𝜔⁄
𝑎𝑛 =2𝜏∫ 𝑥(𝑡) cos𝜔𝑛𝑡 𝑑𝑡𝜏 2⁄
−𝜏 2⁄=
2𝜏∫ 𝑥(𝑡) cos 𝑛𝜔𝑡 𝑑𝑡𝜏 2⁄
−𝜏 2⁄=𝜔
𝜋∫ 𝑥(𝑡) cos 𝑛𝜔𝑡 𝑑𝑡𝜋 𝜔⁄
−𝜋 𝜔⁄
, 𝑛 = 1,2, … , 𝑛
𝑏𝑛 =2𝜏∫ 𝑥(𝑡) sin𝜔𝑛𝑡 𝑑𝑡𝜏 2⁄
−𝜏 2⁄=
2𝜏∫ 𝑥(𝑡) sin 𝑛𝜔𝑡 𝑑𝑡𝜏 2⁄
−𝜏 2⁄=𝜔
𝜋∫ 𝑥(𝑡) sin 𝑛𝜔𝑡 𝑑𝑡𝜋 𝜔⁄
−𝜋 𝜔⁄
, 𝑛 = 1,2, … , 𝑛
توان روابط باال را به صورت زیر نیز بیان نمود:شود میچون سری فوریه برای تابع هارمونیک نوشته می
𝜔 =2𝜋𝜏→ 𝜏 =
2𝜋𝜔
𝑎0 =2𝜏∫ 𝑥(𝑡) 𝑑𝑡𝜏
0=𝜔
𝜋∫ 𝑥(𝑡) 𝑑𝑡
2𝜋 𝜔⁄
0
𝑎𝑛 =2𝜏∫ 𝑥(𝑡) cos 𝑛𝜔𝑡 𝑑𝑡𝜏
0=𝜔
𝜋∫ 𝑥(𝑡) cos 𝑛𝜔𝑡 𝑑𝑡
2𝜋 𝜔⁄
0 , 𝑛 = 1,2, … , 𝑛
𝑏𝑛 =2𝜏∫ 𝑥(𝑡) sin 𝑛𝜔𝑡 𝑑𝑡𝜏
0=𝜔
𝜋∫ 𝑥(𝑡) sin 𝑛𝜔𝑡 𝑑𝑡
2𝜋 𝜔⁄
0 , 𝑛 = 1,2, … , 𝑛

8
ط نیز بیان نمود:توان به صورت تابع مختلهمچنین سری فوریه را می
که در آن:
شوند:از رابطه زیر محاسبه می 𝑐𝑛ضرایب
سری فوریه تابع زیر را محاسبه نموده و طیف فرکانسی را ترسیم نمایید. :1مثال
حل:
انتگرال جز به جز:

9
∫𝑢 𝑑𝑣 = 𝑢𝑣 − ∫𝑣 𝑑𝑢
روش جدولی:
توان نوشت:برای این مثال می

10
سری فوریه تابع زیر را محاسبه نموده و طیف فرکانسی را ترسیم نمایید. :2مثال
حل:

11
|2𝑐𝑛| = |𝑎𝑛| 𝑛
4𝐴𝜋2 1
4𝐴9𝜋2 3
4𝐴25𝜋2 5
4𝐴49𝜋2 7
4𝐴81𝜋2 9
4𝐴121𝜋2 11

12
فصل دوم
هاي یك درجه آزاديارتعاش آزاد سیستم
فرکانس طبیعی –معادله حرکت
فنر و دیاگرام آزاد –سیستم جرم – 1شکل
𝜔2با تعریف بسامد مدور
𝑛 =𝑘
𝑚 وان به صورت زیر نوشت:ترابطه باال را می
𝐴 = 𝑥(0), 𝐵 = �̇�(0)
توان نوشت:رابطه باال را به صورت زیر می

13
: 1مثال
بیابید. 𝐹را تحت نیروی کششی )یا فشاری( 𝐸، مدول یانگ 𝐴، سطح مقطع 𝑙ثابت فنر معادل میله یکنواخت به طول
حل:
توان به صورت زیر بیان نمود:را می 𝐹ی کششی )یا فشاری( تحت نیرو δافزایش طول )یا کاهش طول(
شود:( به صورت زیر تعریف می𝜎و تنش ) (휀در رابطه باال کرنش )
휀 =تغییر طول
طول اصلی=𝛿
𝑙
𝜎 =نیرو
سطح
휀 =𝜎
𝐸
در نتیجه:
:2مثال
یر را تعیین نمایید.روی انتهای تیر یک سر درگیر با جرم ناچیز ز 𝑀فرکانس طبیعی جرم

14
:𝑃رابطه خمش تیر یک سر درگیر با نیروی متمرکز
𝑃 = 𝑊 = 𝑚𝑔
𝐼 ممان اینرسی تیر حول محور𝑧 ،𝐸 مدول االستیسیته یانگ
𝜔𝑛 = √𝑘𝑒𝑞
𝑚= √
3𝐸𝐼 𝑙3⁄𝑚
= √3𝐸𝐼𝑚𝑙3
:3مثال
نوسان را در 10ای قرار گرفته و رها شود، ر است. اگر چرخ تحت جابجایی زاویهمت 2و طول آن 𝑐𝑚 0/5قطر میله فوالدی
را محاسبه نمایید. دهد. ممان اینرسی قطبی چرخ و الستیکثانیه انجام می 2/30
حل:
رابطه پیچش به صورت زیر است:
𝐿𝛾 = 𝜌𝜙 → 𝜙 =𝐿𝛾
𝜌
𝜙 =𝑇𝐿
𝐽𝑏𝑎𝑟𝐺→ 𝑇 =
𝐽𝑏𝑎𝑟𝐺
𝐿𝜙 → 𝑇 = 𝐾𝜙
𝐾 =𝐽𝑏𝑎𝑟𝐺
𝐿
∑𝑀 = 𝐽𝛼 → −𝑇 = 𝐽�̈�
∑𝑀 = 𝐽𝛼 → −𝑇 = 𝐽�̈�
𝐽�̈� = −𝐾𝜃
𝐽 میله و الستیک ممان اینرسی جرمی ،𝐾 سختی پیچشی وθ .زاویه پیچش بر حسب رادیان است

15
توان نوشت:برای میله فوالدی می
𝐾 = 𝐺𝐽𝑏𝑎𝑟/𝑙
𝐽𝑏𝑎𝑟 =𝜋
2 𝑟4 =
𝜋
32𝐷4
𝐺 مدول برشی فوالد
𝐽𝑏𝑎𝑟 =
𝜋
32 (0/5 × 10−2)4= 0/006136× 10−8 𝑚4
𝜔𝑛2 =
𝐾
𝐽
:4مثال
معادله حرکت و فرکانس طبیعی سیستم زیر را بیابید.
حل:
ر سمت راست فشرده شده است. اگر خالف این در حالت تعادل فرض شده که فنر سمت چپ از طول آزاد کشیده شده و فن
قضیه فرض شود باز جواب تغییر نخواهد کرد.
حالت تعادل
در حالت تعادل:

16
∑𝑀𝑂 = 0 → 𝑃1𝑎 −𝑚𝑔𝐶 + 𝑃2𝑏 = 0
:در حالت ارتعاش
∑𝑀𝑂 = −𝐽𝑂�̈� → (𝑃1 + 𝑘𝑎𝜃)𝑎 − 𝑚𝑔𝐶 + (𝑃2 + 𝑘𝑏𝜃)𝑏 = −𝐽𝑂�̈�
𝑃1𝑎 −𝑚𝑔𝐶 + 𝑃2𝑏 + 𝑘𝑎2𝜃 + 𝑘𝑏2𝜃 = −𝐽𝑂�̈�
→ (𝑘𝑎2 + 𝑘𝑏2)𝜃 = −𝐽𝑂�̈� → �̈� +𝑘(𝑎2 + 𝑏2)
𝐽𝑂𝜃 = 0
𝜔𝑛 = √𝑘(𝑎2 + 𝑏2)
𝐽𝑂
برای سادگی بهتر است که تغییر مکان گردندالت تعادل در نهایت حذف میچون در معادله حرکت، عبارات مربوط به ح
نسبت به حالت تعادل سنجیده شود و نیروهای ذاتی موثر در حالت تعادل نیز در نظر گرفته نشوند:
∑𝑀𝑂 = −𝐽𝑂�̈� → (𝑘𝑎𝜃)𝑎 + (𝑘𝑏𝜃)𝑏 = −𝐽𝑂�̈� → �̈� +𝑘(𝑎2 + 𝑏2)
𝐽𝑂𝜃 = 0
𝜔𝑛 = √𝑘(𝑎2 + 𝑏2)
𝐽𝑂
:فنر –در مورد مثال جرم
−𝑘𝑥 = 𝑚�̈� → 𝑚�̈� + 𝑘𝑥 = 0

17
روش انرژی
در یک سیستم پایستار انرژی کل ثابت است. برای ارتعاش آزاد یک سیستم نامیرا بخشی از انرژی به صورت انرژی جنبشی و
ت.بخشی دیگر به صورت انرژی پتانسیل ظاهر شده اس
شود.ناشی از سرعت در جرم ذخیره می (𝑇)ین بدان معنی است که انرژی جنبشی
به شکل انرژی کرنش در تغییر مکان االستیک، یا کار انجام شده در میدان نیروی جاذبه ذخیره شده (𝑈)انرژی پتانسیل
است.
𝑇 + 𝑈 = ثابت𝑑
𝑑𝑡(𝑇 + 𝑈) = 0
توان نوشت:از اصل بقای انرژی می
𝑇1 + 𝑈1 = 𝑇2 + 𝑈2
گذرد:را برای حالتی در نظر بگیریم که جرم از وضعیت تعادل استاتیکی خود می 1اگر اندیس
𝑈1 = 0 → 𝑇1 = 𝑇𝑚𝑎𝑥
متناظر با حالتی باشد که متناظر با حداکثر تغییر مکان باشد در این حالت سرعت جرم برابر صفر خواهد بود: 2اگر اندیس
𝑇2 = 0 → 𝑈2 = 𝑈𝑚𝑎𝑥
توان به صورت زیر نوشت:پس اصل بقای انرژی را می
𝑇𝑚𝑎𝑥 = 𝑈𝑚𝑎𝑥 توان برای تعیین فرکانس طبیعی سیستم استفاده نمود.از رابطه باال می
:5 مثال
به دست آورید. 𝑘و ثابت فنر 𝑚فنر به جرم –معادله حرکت را برای سیستم جرم
حل:
12𝑚𝑉
2 +12 𝑘𝑥
2 = →ثابت12𝑚�̇�
2 +12 𝑘𝑥
2 = ثابت𝑑
𝑑𝑡(12𝑚�̇�
2 +12𝑘𝑥
2) = 0 → (𝑚�̈� + 𝑘𝑥)�̇� = 0
𝑥 در حالت کلی ≠ 0 →̇ 𝑚�̈� + 𝑘𝑥 = 0

18
:6مثال
فرکانس طبیعی سیستم زیر را تعیین نمایید.
حل:
در زمان عبور از تعادل استاتیکی
ییر مکان فنردر حالت حداکثر تغ
𝜃 = 𝐴 sin(𝜔𝑛𝑡 + 𝜑)
𝜃̇= 𝐴𝜔𝑛 𝑐𝑜𝑠(𝜔𝑛𝑡 + 𝜑)
12 (𝐽 + 𝑚𝑟1
2)𝜃̇ 2|𝑚𝑎𝑥
=12𝑘𝑟2
2 𝜃2|𝑚𝑎𝑥
sin(𝜔𝑛𝑡 + 𝜑) = 1 → 𝜃𝑚𝑎𝑥 = 𝐴
𝑐𝑜𝑠(𝜔𝑛𝑡 + 𝜑) = 1 → �̇�𝑚𝑎𝑥 = 𝐴𝜔𝑛
→ (𝐽 + 𝑚𝑟12)(𝐴𝜔𝑛)
2 = 𝑘𝑟22𝐴2
یادآوری از دینامیک:

19
ای کلیحرکت صفحه حرکت دورانی حرکت انتقالی
فنر: پتانسیل انرژی
𝑇 =12𝑘𝑥
2
از مرکز جرم: 𝑑رابطه ممان اینرسی در فاصله
:7مثال
ن لغزش تعیین نمایید.فرکانس طبیعی سیستم زیر را با فرض غلتش بدو
سرعت انتقالی مرکز دیسک𝑉𝑐 = (𝑅 − 𝑟)�̇�
𝑉𝑐 = 𝑟�̇�} → �̇� =
(𝑅 − 𝑟)
𝑟�̇�
𝑇 =12𝑚𝑉𝑐
2 +12 𝐼�̇�
2
بنابراین:
ممان اینرسی دیسک حول مرکز جرمش عبارتست از:
𝐼 =12𝑚𝑟
2
𝑑
𝑑𝑡(𝑇 + 𝑈) = 0
کوچک: به ازای زوایای
sin 𝜃 ≈ 𝜃

20
راه دوم:
𝑇 =34𝑤
𝑔(𝑅 − 𝑟)2�̇�2
𝜃 کوچک→ 𝑈 = 2𝑤(𝑅 − 𝑟)𝑠𝑖𝑛2 𝜃
2 = 2𝑤(𝑅 − 𝑟) ×𝜃2
4 =12 𝑤
(𝑅 − 𝑟)𝜃2
𝜃=𝐴sin(𝜔𝑡+𝜑)→ 𝑇 =
34𝑤
𝑔(𝑅 − 𝑟)2 × 𝐴2𝜔2 cos2(𝜔𝑡 + 𝜑) → 𝑇𝑚𝑎𝑥 =
34𝑤
𝑔(𝑅 − 𝑟)2 × 𝐴2𝜔2
𝜃=𝐴sin(𝜔𝑡+𝜑)→ 𝑈 =
12 𝑤
(𝑅 − 𝑟)𝜃2 =12 𝑤
(𝑅 − 𝑟)𝐴2 𝑠𝑖𝑛2(𝜔𝑡 + 𝜑) → 𝑈𝑚𝑎𝑥 =12 𝑤
(𝑅 − 𝑟)𝐴2
𝑇𝑚𝑎𝑥 = 𝑈𝑚𝑎𝑥 →34𝑤
𝑔(𝑅 − 𝑟)2 × 𝐴2𝜔2 =
12 𝑤
(𝑅 − 𝑟)𝐴2 → 𝜔𝑛 = √2𝑔
3(𝑅 − 𝑟)
: جرم موثرروش رایلی
های جرم گسترده به کار برد به شرط آن که حرکت هر نقطه های چند جرمی یا سیستمتوان برای سیستمروش انرژی را می
از سیستم معلوم باشد.
توان به صورت زیر تبدیل نمود:انرژی جنبشی سیستم را در نهایت می
𝑇 =12𝑚𝑒𝑓𝑓�̇�
2
𝑚𝑒𝑓𝑓 جرم موثر یا جرم تجمیعی معادل در نقطه مشخص استو اگر سختی فنر در آن نقطه معلوم باشد فرکانس طبیعی از
شود:رابطه زیر تعیین می
𝜔𝑛 = √𝑘
𝑚𝑒𝑓𝑓
:8مثال
فنر ساده تعیین نمایید. –اثر جرم فنر را بر روی فرکانس طبیعی سیستم جرم
حل:
𝑦به صورت خطی با 𝑦توان فرض کرد سرعت یک المان جزء طولی از فنر در فاصله باشد می 𝑀رکز سرعت جرم متم �̇�اگر
کند:تغییر می
𝑉 = �̇� ×𝑦
𝑙

21
توان با انتگرال زیر محاسبه نمود:انرژی جنبشی فنر را می
𝑇 =12∫ 𝑉
2𝑙
0𝑑𝑚, 𝑑𝑚 =
𝑚𝑠𝑙𝑑𝑦
𝑚𝑠 جرم فنر است
𝑇 =
12 𝑚𝑠3 �̇�2 +
12 𝑚�̇�
2 =12 𝑚𝑒𝑓𝑓�̇�
2
:9مثال
در وسط آن قرار دارد. جرم موثر و فرکانس طبیعی سیستم زیر را تعیین 𝑀است و جرم متمرکز 𝑚𝑏جرم تیر زیر
𝑃𝑙3در وسط تیر از رابطه 𝑃نمایید.خمش در اثر نیروی متمرکز 48𝐸𝐼⁄ شود.می محاسبه
حل:
در حالتی که میله فاقد جرم باشد:
𝑦𝑚𝑎𝑥 =𝑊𝑙3
48𝐸𝐼
𝜔𝑛 = √𝑘𝑒𝑞
𝑀= √
𝑊 𝑦𝑚𝑎𝑥⁄
𝑀= √
48𝐸𝐼/𝑙3
𝑀= √
48𝐸𝐼𝑀𝑙3
نماییم:برای در نظر گرفتن جرم میله به صورت زیر عمل می
𝑇 =12∫ 𝑉2𝑑𝑚
𝑙/2
0, 𝑑𝑚 =
𝑚𝑏𝑙/2
انرژی جنبشی بیشینه تیر به تنهایی:
𝑇𝑚𝑎𝑥,𝑡𝑜𝑡𝑎𝑙 =12𝑀�̇�𝑚𝑎𝑥
2 +12 (0/4857𝑚𝑏)�̇�𝑚𝑎𝑥2 =
12𝑚𝑒𝑓𝑓�̇�𝑚𝑎𝑥
2

22
:10مثال
سیستم زیر بیابید.برای Cو Aدو نقطه جرم معادل را در
𝑚𝑟 جرم بازو
𝑚𝑣 جرم سوپاپ
𝑚𝑝 جرم میله متصل به پیرو
𝑚𝑠 جرم فنر
حل:
𝑇 =
12𝑚𝑝�̇�𝑝
2 +12𝑚𝑣�̇�𝑣
2 +12(𝐼𝑂)�̇�𝑟
2 +12 (
13𝑚𝑠) �̇�𝑣
2
𝐼𝑂 = 𝐽𝑟 +𝑚𝑟𝑙32
داریم: Aدر نقطه
�̇�𝑝 = 𝑙1�̇�, �̇�𝑣 = 𝑙2�̇�, �̇�𝑟 = 𝑙3�̇�
𝑇 =12𝑚𝑝(𝑙1�̇�)
2+
12𝑚𝑣(𝑙2�̇�)
2+
12 (𝐽𝑟 +𝑚𝑟𝑙3
2)�̇�𝑟2 ++
12 (
13𝑚𝑠) (𝑙2�̇�)
2
𝑇 =12𝑚𝑒𝑓𝑓�̇�𝐴
2 =12𝑚𝑒𝑓𝑓�̇�𝑝
2 =12𝑚𝑒𝑓𝑓(𝑙1�̇�)
2
→12𝑚𝑝(𝑙1�̇�)
2+
12𝑚𝑣(𝑙2�̇�)
2+
12 (𝐽𝑟 +𝑚𝑟𝑙3
2)�̇�𝑟2 + +
12 (
13𝑚𝑠) (𝑙2�̇�)
2=
12𝑚𝑒𝑓𝑓(𝑙1�̇�)
2
𝑚𝑒𝑓𝑓 = 𝑚𝑝 +𝑚𝑣 (𝑙2𝑙1)
2
+ 𝐽𝑟 (1𝑙1)
2+𝑚𝑟 (
𝑙3𝑙1)
2
+13𝑚𝑠 (
𝑙2𝑙1)
2
داریم: Cدر نقطه
𝑇 =12𝑚𝑝(𝑙1�̇�)
2+
12𝑚𝑣(𝑙2�̇�)
2+
12 (𝐽𝑟 +𝑚𝑟𝑙3
2)�̇�𝑟2 ++
12 (
13𝑚𝑠) (𝑙2�̇�)
2
𝑇 =12𝑚𝑒𝑓𝑓�̇�𝐶
2 =12𝑚𝑒𝑓𝑓�̇�𝑣
2 =12𝑚𝑒𝑓𝑓(𝑙2�̇�)
2
→12𝑚𝑝(𝑙1�̇�)
2+
12𝑚𝑣(𝑙2�̇�)
2+
12 (𝐽𝑟 +𝑚𝑟𝑙3
2)�̇�𝑟2 + +
12 (
13𝑚𝑠) (𝑙2�̇�)
2=
12𝑚𝑒𝑓𝑓(𝑙2�̇�)
2
𝑚𝑒𝑓𝑓 = 𝑚𝑝 (𝑙1𝑙2)
2
+𝑚𝑣 + 𝐽𝑟 (1𝑙2)
2+𝑚𝑟 (
𝑙3𝑙2)
2
+ (13𝑚𝑠)

23
سختی معادل فنرها
فنرهای موازی
فنر موازی: 𝑛برای
فنرهای سری:
فنر سری: 𝑛برای

24
:11مثال
ثابت فنر معادل سیستم زیر را بیابید.
حل:
جدول سختی فنر
𝐼 ممان اینرسی سطح مقطع
𝑙 طول کلی
𝐴 سطح مقطع
𝐽 ثابت پیچشی سطح مقطع

25
)ادامه( جدول سختی فنر
𝑛 تعداد دورهای فنر

26
ارتعاش آزاد با میرایی لزجی
بر روی الیه نازکی از سیال حرکت کند: 𝑣که یک صفحه تخت با سرعت ثابت در حالتی
𝑢 =
𝑣𝑦
ℎ→𝑑𝑢
𝑑𝑦=𝑣
ℎ→ 𝜏 = 𝜇
𝑣
ℎ
کند:که در خالف جهت حرکت صفحه عمل می متناسب با سرعت است 𝐹طبق رابطه باال نیروی میرایی لزجی
باشد.می میرایی میرا کننده ثابت 𝑐در رابطه باال
توان میرایی را از در میرایی لزجی، نیروی میرا کننده متناسب با سرعت جسم ارتعاشی است. به عنوان مثال در موارد زیر می
نوع لزجی فرض کرد:
الیه نازک سیال بین سطوح لغزنده -1
جریان سیال حول یک پیستون در یک سیلندر -2
فیسیجریان سیال از میان یک ار -3
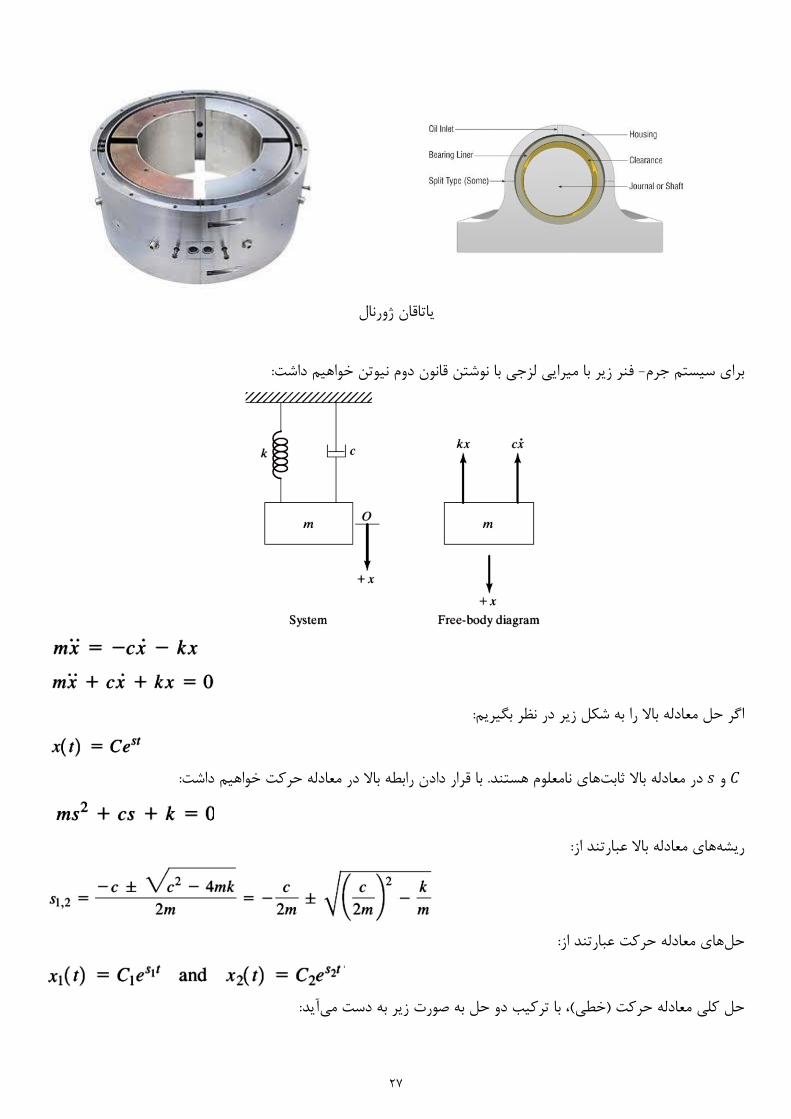
ل یک یاتاقان ژورنالالیه نازک سیال حو -4
(2و 1اریفیس فلنج )شماره
27
یاتاقان ژورنال
فنر زیر با میرایی لزجی با نوشتن قانون دوم نیوتن خواهیم داشت: -برای سیستم جرم
اگر حل معادله باال را به شکل زیر در نظر بگیریم:
𝐶 و𝑠 رار دادن رابطه باال در معادله حرکت خواهیم داشت:های نامعلوم هستند. با قدر معادله باال ثابت
های معادله باال عبارتند از:ریشه
های معادله حرکت عبارتند از:حل
آید:، با ترکیب دو حل به صورت زیر به دست می)خطی( حل کلی معادله حرکت

28
شوند.تم تعیین میهای دلخواه هستند که از شرایط اولیه سیسثابت 𝐶2و 𝐶1های ثابت
ثابت میرایی بحرانی
است که به ازای آن جمله زیر رادیکال در جواب معادله صفر شود: 𝑐مقداری از ثابت بحرانی 𝑐𝑐میرایی بحرانی
𝜔𝑛 =
𝑐𝑐2𝑚
نسبت میرایی
شود:به صورت نسبت ثابت میرایی به ثابت میرایی بحرانی تعریف می ζنسبت میرایی
در نتیجه:
و در نتیجه رفتار حل معادله حرکت به مقدار میرایی بستگی دارد. 𝑠2و 𝑠1های ماهیت ریشه
که در حالتیζ = .)میرایی بحرانی( انجامد که پیشتر بدان اشاره شدبه ارتعاشات آزاد می 0
در حالتی کهζ > .)میرایی فوق بحرانی( فتداباشد هر دو ریشه حقیقی بوده و نوسانی اتفاق نمی 1
در حالتی کهζ < .)حالت زیرمیرایی( باشدمی باشد دو ریشه مختلط شده و حرکت نوسانی 1
Underdamped systemحالت زیرمیرایی -1
ζ)باشد در این شرایط در حالتی که 2− ها عبارتند از:منفی بوده و ریشه (1

29
𝐶1)در روابط باال
′ , 𝐶2′) ،(𝑋, 𝜙) و(𝑋0, 𝜙0) شوند.های دلخواه هستند که از شرایط اولیه محاسبه میثابت
شرایط اولیه:
𝑥(𝑡) = 𝑒−ζ𝜔𝑛𝑡 (𝐶1′ cos√1− ζ
2𝜔𝑛𝑡 + 𝐶2
′ sin√1− ζ2𝜔𝑛𝑡)
�̇�(𝑡) = (−ζ𝜔𝑛) × 𝑒−ζ𝜔𝑛𝑡 (𝐶1
′ cos√1− ζ2𝜔𝑛𝑡 + 𝐶2
′ sin√1− ζ2𝜔𝑛𝑡)
+𝑒−ζ𝜔𝑛𝑡√1− ζ2𝜔𝑛 (−𝐶1
′ sin√1− ζ2𝜔𝑛𝑡 + 𝐶2
′ cos√1− ζ2𝜔𝑛𝑡)
باشد:بنابراین حل به صورت زیر می
(I)
,𝑋) های ثابت 𝜙) و(𝑋0, 𝜙0) شوند:به صورت زیر بیان می

30
ζ√ای بیانگر حرکت هارمونیک میرا با فرکانس زاویه (I)دله حرکت معا2− 1𝜔𝑛 است اما به دلیل ضریب𝑒−ζω𝑛t اش با دامنه
یابد )شکل زیر(.زمان به صورت نمایی کاهش می
نمودار حل زیرمیرایی
𝜔𝑑 کمیت =√1− ζ
2𝜔𝑛 شود.نامیده می فرکانس ارتعاش میرا
است. 𝜔𝑛کمتر از فرکانس طبیعی 𝜔𝑑توان دید که فرکانس ارتعاش میرا یم
𝜔𝑑 < 𝜔𝑛 ( همراه است. که در شکل زیر نشان داده شده است:𝜔𝑑کاهش فرکانس ارتعاش میرا با افزایش مقدار میرایی )طبق رابطه
𝜔𝑑2 + ζ
2𝜔𝑛
2 = 𝜔𝑛2
با میرایی 𝜔𝑑نمودار تغییرات
شود.حالت زیرمیرایی در مطالعه ارتعاشات مکانیکی بسیار با اهمیت است زیرا تنها حالتی است که منجر به حرکت نوسانی می

31
(Critically Damped System)میرایی بحرانی -2
در این حالت:
ζ = یا 1 𝑐 = 𝑐𝑐 یا 𝑐 2𝑚 = √𝑘 𝑚⁄⁄
:)ریشه مضاعف( حرکت با هم برابرندهای معادله در این حالت ریشه
باشد:حل معادله حرکت به صورت زیر می
�̇�(𝑡) = 𝐶2𝑒
−𝜔𝑛𝑡 − 𝜔𝑛(𝐶1 + 𝐶2𝑡)𝑒−𝜔𝑛𝑡
شرایط اولیه:
در نتیجه:
𝑡شود که حل باال غیرپریودیک است زیرا وقتی مشاهده می → 𝑒−𝜔𝑛𝑡رود می ∞ → و حرکت به صورت کند یل میم 0
یابد )شکل زیر(.صفر کاهش می ناگهانی به
مقایسه حرکت با انواع متفاوت میرایی
حالت فوق میرایی -3
ζ > یا 1 𝑐 > 𝑐𝑐 یا 𝑐 2𝑚 > √𝑘 𝑚⁄⁄
در این حالت معادله حرکت دو ریشه مجزا به صورت زیر دارد:

32
𝑠2که در آن ≪ 𝑠1 توان به صورت زیر بیان نمود:ادله حرکت را میباشد. حل معمی
𝑥(𝑡) = 𝐶1 𝑒(−ζ+√ζ
2−1)𝜔𝑛𝑡
+ 𝐶2 𝑒(−ζ−√ζ
2−1)𝜔𝑛𝑡
�̇�(𝑡) = 𝐶1 𝜔𝑛 (−ζ+√ζ
2− 1)𝑒
(−ζ+√ζ2−1)𝜔𝑛𝑡
+ 𝐶2 𝜔𝑛 (−ζ−√ζ
2− 1)𝑒
(−ζ−√ζ2−1)𝜔𝑛𝑡
شرایط اولیه:
در نتیجه:
دهد که صرفنظر از شرایط اولیه تحمیلی بر سیستم، حرکت غیرپریودیک است. های باال، نشان میحل معادله حرکت با ثابت
یابند که در شکل باال نشان داده شده است.هر دو منفی بوده و به صورت نمایی با زمان کاهش می 𝑠2و 𝑠1های زیرا ریشه
کاهش لگاریتمی
یک روش ساده برای تعیین میرایی یک سیستم اندازه گیری زوال نوسان آزاد آن سیستم است. هرچه میرایی بیشتر باشد
میزان زوال بیشتر خواهد شد.
باشد.کاهش لگاریتمی بیانگر نرخ کاهش دامنه ارتعاش میرای آزاد می
شود.دامنه متوالی تعریف می کاهش لگاریتمی به صورت لگاریتم طبیعی نسبت هر دو
توان نوشت:اند میهای متناظر دو دامنه متوالی باشند که برای یک سیستم زیرمیرا اندازه گیری شدهزمان 𝑡2و 𝑡1اگر
اما
که در آن

33
𝜔𝑑 =√1− ζ
2𝜔𝑛
دوره تناوب ارتعاش میراست. بنابراین:
بنابراین:
شود:به صورت زیر محاسبه می (𝛿)کاهش لگاریتمی
معادله )الف(
به ازای مقادیر بسیار کوچک میرایی خواهیم داشت:
معادله )ب(
تغییرات کاهش لگاریتمی با میرایی
مثال:
توان از رابطه زیر برای تعیین کاهش لگاریتمی استفاده نمود:نشان دهید که به جای استفاده از دو جابجایی پشت سر هم می
باشند.می 𝑡𝑚+1و 𝑡1های های نوسان مربوط به زمانبه ترتیب دامنه 𝑥𝑚+1و 𝑥1یک عدد صحیح بوده و 𝑚در رابطه باال

34
حل:
میرایی کولمب
شود.میرایی کولمب از لغزش دو سطح خشک بر روی یکدیگر نتیجه می
شود:ی عمود بر سطح و ضریب اصطکاک سطح و مستقل از سرعت فرض مینیروی میرایی برابر است با حاصلضرب نیرو
فنر با میرایی کولمب –سیستم جرم
جهت حرکت جرم به کدام سمت باشد دو حالت مختلف را باید بررسی نمود:بسته به این که
𝑥وقتی که -1 > 𝑑𝑥و 0 𝑑𝑡 > 𝑥است یا زمانی که ⁄0 < 𝑑𝑥و 0 𝑑𝑡 > م از سمت چپ به سمت وقتی که جریعنی ⁄0
کند:راست حرکت می
𝑥 > 𝑑𝑥 و 0 𝑑𝑡 > 0⁄
𝑥 < 𝑑𝑥 و 0 𝑑𝑡 > 0⁄
(I)معادله

35
باشد:حل معادله باال به صورت زیر می
𝐴1 و𝐴2 هایی هستند که باید به کمک شرایط اولیه در نیم سیکل مزبور محاسبه گردند.ثابت
𝑥وقتی که -2 > 𝑑𝑥و 0 𝑑𝑡 < 𝑥است یا زمانی که ⁄0 < 𝑑𝑥و 0 𝑑𝑡 < وقتی که جرم از سمت راست به یعنی ⁄0
کند:سمت چپ حرکت می
𝑥 > 𝑑𝑥 و 0 𝑑𝑡 < 0⁄
𝑥 < 𝑑𝑥 و 0 𝑑𝑡 < 0⁄
(II)معادله
𝐴3 و𝐴4 هایی هستند که باید به کمک شرایط اولیه در این نیم سیکل محاسبه گردند.ثابت
توان تنها با رابطه زیر بیان نمود:را می (II)و (I)معادالت
𝑚�̈� + 𝜇𝑚𝑔�̇�
|�̇�|+ 𝑘𝑥 = 0
�̇�در رابطه باال
|�̇�| شود:جایگزین نمود که بدان تابع عالمت گفته می ̇𝑠𝑔𝑛(𝑥)توان با تابع را می
(III)معادله
شود:تابع عالمت به صورت زیر تعریف می
𝑠𝑔𝑛(𝑦) =
{
ایاز 0 𝑦 به = 0
𝑦 به ازای 1 > 0
𝑦 به ازای 1− < 0
اگر شرایط اولیه زیر را در نظر بگیریم: (III)برای حل معادله
𝑡یعنی در لحظه .1 = های و ثابت باشدو سرعت صفر است. بنابراین حرکت جسم از راست به چپ می 𝑥0جابجایی 0
𝐴3 و𝐴4 گردند:به صورت زیر محاسبه می

36
�̇�(𝑡) = −𝐴3𝜔𝑛 sin𝜔𝑛𝑡 + 𝐴4𝜔𝑛 cos𝜔𝑛𝑡
توان با رابطه زیر بیان نمود:و حل معادله حرکت را می
(IV)معادله
0حل باال تنها برای بازه زمانی ≤ 𝑡 ≤ 𝜋 𝜔𝑛⁄ .صادق است
𝑡وقتی = 𝜋 𝜔𝑛⁄ نقطه تعادل قرار دارد که این فاصله از رابطه زیر باشد جرم در دورترین فاصله در سمت چپ
گردد:محاسبه می
𝑥چون حرکت از جابجایی = 𝑥0 آغاز شده است پس اندازه کاهش𝑥 در زمان𝑡 = 𝜋 𝜔𝑛⁄ 2به میزان𝜇𝑁 𝑘⁄
باشد.می
𝑡)در زمان 𝐴2و 𝐴1های در نیمه دوم حرکت برای محاسبه ثابت .2 = 𝑡ان از زمان تو( می 0 = 𝜋 𝜔𝑛⁄ در معادله(IV)
استفاده نمود:
�̇�(𝑡) = −𝐴1𝜔𝑛 sin𝜔𝑛𝑡 + 𝐴2𝜔𝑛 cos𝜔𝑛𝑡
𝑥|𝑡=𝜋 𝜔𝑛⁄ = 𝑥|𝑡=𝜋 𝜔𝑛⁄ (IV)در معادله = −(𝑥0 −2𝜇𝑁𝑘)
�̇�|𝑡=𝜋 𝜔𝑛⁄ = �̇�|𝑡=𝜋 𝜔𝑛⁄ (IV)در معادله = −𝜔𝑛 (𝑥0 −𝜇𝑁
𝑘) sin𝜔𝑛𝑡|
𝑡=𝜋 𝜔𝑛⁄= 0
گردند:به صورت زیر محاسبه می 𝐴2و 𝐴1های بنابراین ثابت
گردد:سیکل چپ به راست به صورت زیر بیان میجواب معادله حرکت در نیم
𝜋حل باال تنها برای بازه زمانی 𝜔𝑛⁄ ≤ 𝑡 ≤ 2𝜋 𝜔𝑛⁄ .صادق است
سیکل عبارتست از:جابجایی در پایان این نیم
باشند. سیکل سوم میاین مقادیر، شرایط اولیه برای شروع نیم

37
𝑥𝑛شود حرکت جرم زمانی متوقف می ≤ 𝜇𝑁 𝑘⁄ باشد زیرا در این شرایط نیروی𝑘𝑥 کمتر از نیروی اصطکاکμ𝑁 .خواهد بود
توان از رابطه زیر محاسبه نمود:را می (𝑟)های پیموده شده پیش از توقف ین تعداد نیم سیکلبنابرا
خالصه نتایج:
معادله حرکت در حالتی که میرایی کولمب وجود داشته باشد غیرخطی است در حالی که در میرایی لزجی معادله -1
باشد.خطی می
𝑚�̈� + 𝑘𝑥 + 𝜇𝑚𝑔𝑠𝑔𝑛(�̇�) = 0
ماند در حالی که با افزودن میرایی لزجی کاهش یعی سیستم با افزودن میرایی کولمب بدون تغییر میفرکانس طب -2
یابد.می
𝜔𝑛,کولمب =
√𝑘
𝑚, 𝜔
𝑑,لزجی =√1− ζ
2𝜔𝑛
یرتناوبی باشد.تواند غدر میرایی کولمب حرکت تناوبی )پریودیک( است اما در میرایی لزجی )حالت فوق میرایی( می -3
رسد در حالی که در حالت تئوری میرایی لزجی حرکت در میرایی کولمب سیستم پس از مدتی به حالت سکون می -4
به صورت مداوم ادامه خواهد داشت.
شیب خط کاهش دامنه در میرایی کولمب به صورت زیر قابل محاسبه است: -5
2𝜋مان در هر دو سیکل متوالی از میرایی کولمب )در اختالف ز -6 𝜔𝑛⁄ 4(، دامنه حرکت به میزان𝜇𝑁 𝑘⁄ کاهش
یابد:می
یابد در حالی که در میرایی لزجی کاهش به صورت نمایی در میرایی کولمب دامنه به صورت خطی کاهش می -7
باشد.می
در میرایی لزجی:
𝑥𝑚+1 = 𝑥1𝑒𝑚ζ𝜔𝑛𝜏𝑑
در میرایی کولمب:
𝑥2𝑚 = 𝑥0 −4𝑚𝜇𝑁𝑘

38
حرکت جرم با میرایی کولمب

39
یادآوري
نمایش توابع هارمونیک به صورت فازور
شود:یک تابع هارمونیک ساده به صورت زیر تعریف می
𝑥 = 𝑋 cos(𝜔𝑡 + 𝛼) د.شونای و زاویه فاز نامیده میبه ترتیب دامنه، فرکانس زاویه 𝛼و 𝑋 ،𝜔که در آن
توان هارمونیک را گردد پس میبه طور کامل مشخص می 𝛼و فاز 𝑋، دامنه 𝜔ای از آنجایی که یک هارمونیک با فرکانس زاویه
زیر بیان نمود: به وسیله عدد مختلط
�̅� = 𝑋𝑒𝑖𝛼 = 𝑋 cos 𝛼 + 𝑖 𝑋 sin 𝛼 که در آن
𝑋 = |�̅�| 𝑥بنابراین = 𝑋 cos(𝜔𝑡 + 𝛼) سط عد مختلط توان تورا می�̅� = 𝑋𝑒𝑖𝛼 بیان نمود. از طرفی با داشتن عدد مختلط
�̅� = 𝑋𝑒𝑖𝛼 ای و فرکانس زاویه𝜔 گردد:هارمونیک به صورت زیر تعیین می
𝑥(𝑡) = 𝑅𝑒(�̅�𝑒𝑖𝜔𝑡)
𝑅𝑒(�̅�𝑒𝑖𝜔𝑡) = 𝑅𝑒[𝑋𝑒𝑖(𝜔𝑡+𝛼)] = 𝑅𝑒[𝑋 cos(𝜔𝑡 + 𝛼) + 𝑖𝑋 sin(𝜔𝑡 + 𝛼)] = 𝑋 cos(𝜔𝑡 + 𝛼)
شود.خوانده می 𝑥 فازور نمایش دهنده هارمونیک �̅�عدد مختلط
توان با روابط زیر بیان نمود:سرعت و شتاب را نیز می
𝑥(𝑡) = 𝑅𝑒(�̅�𝑒𝑖𝜔𝑡)
�̇�(𝑡) =𝑑
𝑑𝑡𝑅𝑒(�̅�𝑒𝑖𝜔𝑡) = 𝑅𝑒(𝑖𝜔�̅�𝑒𝑖𝜔𝑡) = 𝑅𝑒[𝑖𝜔𝑋𝑒𝑖(𝜔𝑡+𝛼)] = −𝜔𝑋 sin(𝜔𝑡 + 𝛼) = 𝜔𝑋 cos (𝜔𝑡 + 𝛼 +
𝜋
2)
�̇�(𝑡) = 𝑅𝑒[𝜔𝑋𝑒𝑖(𝛼+𝜋 2⁄ )𝑒𝑖𝜔𝑡]
�̈�(𝑡) = 𝑅𝑒(−𝜔2�̅�𝑒𝑖𝜔𝑡) = 𝑅𝑒[−𝜔2𝑋𝑒𝑖(𝜔𝑡+𝛼)] = 𝜔2𝑋 cos(𝜔𝑡 + 𝛼 + 𝜋) = 𝑅𝑒[𝜔2𝑋𝑒𝑖(𝛼+𝜋)𝑒𝑖𝜔𝑡]
𝜋بسرعت و شتاب به ترتی بنابراین نمایش فازوری سرعت و شتاب به ترتیب به رادیان با جابجایی اختالف فاز دارند. 𝜋و ⁄2
𝜔𝑋𝑒𝑖(𝛼+𝜋صورت 2⁄ باشد.می 𝜔2𝑋𝑒𝑖(𝛼+𝜋)و (
اگر تابع هارمونیک را به جای کسینوس با سینوس مشخص کنیم:
𝑥 = 𝑋 𝑠𝑖𝑛(𝜔𝑡 + 𝛼)

40
�̅�توان به صورت فازور را می در این حالت باز هم = 𝑋𝑒𝑖𝛼 توان به صورت زیر نوشت:بیان نمود. تابع هارمونیک را می
𝑥(𝑡) = 𝐼𝑚(�̅�𝑒𝑖𝜔𝑡) مثال:
𝑥(𝑡) = 110√2 cos (2𝜋𝑡 +𝜋
3)
گردد:فازور نمایش دهنده هارمونیک باال به صورت زیر بیان می
�̅� = 110√2𝑒𝜋3𝑖
اینبنابر
𝑥(𝑡) = 𝑅𝑒[�̅�𝑒𝑖2𝜋𝑡]
جهتجمع توابع هارمونیک هم
𝑥1(𝑡) = 𝑋1 cos(𝜔𝑡 + 𝛼1)
𝑥2(𝑡) = 𝑋2 cos(𝜔𝑡 + 𝛼2)
زوری توابع باال به صورت زیر است:نمایش فا
𝑥1(𝑡) = 𝑅𝑒(�̅�1𝑒𝑖𝜔𝑡)
𝑥2(𝑡) = 𝑅𝑒(�̅�2𝑒𝑖𝜔𝑡)
ن:بنابرای
𝑥(𝑡) = 𝑥1(𝑡) + 𝑥2(𝑡) = 𝑅𝑒(�̅�1𝑒𝑖𝜔𝑡 + �̅�2𝑒
𝑖𝜔𝑡) = 𝑅𝑒[(�̅�1 + �̅�2)𝑒𝑖𝜔𝑡] = 𝑅𝑒(�̅�𝑒𝑖𝜔𝑡) = 𝑋 cos(𝜔𝑡 + 𝛽)
که در آن:
𝑋 = |�̅�| = √𝑋12 + 𝑋2
2 + 2𝑋1𝑋2 cos(𝛼1 − 𝛼2)
tan𝛽 =𝑋1 sin 𝛼1 + 𝑋2 sin 𝛼2
𝑋1 cos 𝛼1 + 𝑋2 cos 𝛼2
معادالت باال بیانگر آن هستند که مجموع دو تابع هارمونیک نیز یک هارمونیک با همان فرکانس خواهد بود.

41
در حالت خاص:
𝑥1(𝑡) = 𝑋1 cos𝜔𝑡
𝑥2(𝑡) = 𝑋2 sin𝜔𝑡
𝑥(𝑡) = 𝑥1(𝑡) + 𝑥2(𝑡) = 𝑋1 cos𝜔𝑡 + 𝑋2 cos (𝜔𝑡 −𝜋
2)
𝑥(𝑡) = 𝑥1(𝑡) + 𝑥2(𝑡) = 𝑅𝑒 (𝑋1𝑒𝑖𝜔𝑡 + 𝑋2𝑒
𝑖(𝜔𝑡−𝜋2)) = 𝑅𝑒 [(𝑋1 + 𝑋2𝑒
𝑖(−𝜋2)) 𝑒𝑖𝜔𝑡] = 𝑋 cos(𝜔𝑡 + 𝛽)
بنابراین
𝑋 = |�̅�| = √𝑋12 + 𝑋2
2 + 2𝑋1𝑋2 cos𝜋
2 =√𝑋1
2 + 𝑋22
tan𝛽 =𝑋1 sin0+ 𝑋2 sin (−
𝜋2)
𝑋1 cos 0+ 𝑋2 cos (−𝜋2)= −
𝑋2
𝑋1
مثال:
دامنه و فاز )فازور( برایند دو حرکت زیر را تعیین نمایید.
𝑥1(𝑡) = 2 cos (𝜔𝑡 +𝜋
3)
𝑥2(𝑡) = 3 cos (𝜔𝑡 + 2𝜋
3)
حل:
𝑥(𝑡) = 𝑥1(𝑡) + 𝑥2(𝑡)
𝑥(𝑡) = 𝑅𝑒(�̅�𝑒𝑖𝜔𝑡)
�̅�1 = 2𝑒𝑖𝜋3
�̅�2 = 3𝑒𝑖2𝜋3

42
�̅� = �̅�1 + �̅�2 = 2𝑒𝑖𝜋3 + 3𝑒𝑖
2𝜋3 = |�̅�|𝑒𝑖𝛼
|�̅�| = 𝑋 = √22 + 32 + 2 × 2 × 3 cos (𝜋
3 −2𝜋3 ) ≅ 4/36
tan𝛼 =2 sin 𝜋3 + 3 sin 2𝜋
32 cos 𝜋3 + 3 cos 2𝜋
3= −8/66 → 𝛼 = 𝛼 یا 83/4°− = 96/6°
𝛼 =−83/4𝜋
180 = −0/436𝜋 یا رادیان 𝛼 =96/6180 = 0/537𝜋 رادیان
𝑥(𝑡) = 4/36 𝑐𝑜𝑠 (𝜔𝑡 − 0/436𝜋)
𝑥(𝑡) = 4/36 𝑠𝑖𝑛 (𝜔𝑡 + 0/537𝜋)

43
فصل سوم
هارمونیك با تحریكارتعاش اجباري
کند که حین ارتعاش انرژی خارجی به سیستم داده شود. ای زمانی ارتعاش اجباری را تجربه مییک سیستم مکانیکی یا سازه
ی فراهم نمود. نیروی اعمالی یا تحریک جابجایی توان یا از طریق اعمال نیرو یا از طریق تحریک جابجایانرژی خارجی را می
ممکن است هارمونیک یا غیرهارمونیک اما پریودیک، غیرپریودیک یا ذاتاً تصادفی باشد.
شود. وقتی سیستمی در معرض محرک هارمونیک قرار پاسخ یک سیستم به تحریک هارمونیک، پاسخ هارمونیک نامیده می
پذیرد. فرکانس محرک صورت می گیرد، پاسخ ارتعاشی آن با همانمی
باشند.های رفت و برگشتی میهای دوار، نیروهای ایجاد شده توسط ماشینمنابع متداول محرک هارمونیک نامیرا در ماشین
شود.گردند، پاسخ گذرا نامیده میهای غیرپریودیک که به صورت ناگهانی اعمال میپاسخ یک سیستم به تحریک
معادله حرکت
مطابق شکل تحریک 𝐹(𝑡)ستمی با یک درجه آزادی با میرایی لزجی را در نظر بگیرید که توسط نیروی هارمونیک ابتدا سی
شده است:
باشد:معادله حرکت با استفاده از قانون دوم نیوتن به صورت زیر می
𝑚�̈� + 𝑐�̇� + 𝑘𝑥 = 𝐹(𝑡) باشد. می 𝑥𝑝(𝑡)و حل ویژه آن 𝑥ℎ(𝑡)ل همگن معادله مجموع ح 𝑥(𝑡)چون معادله حرکت باال ناهمگن است حل کلی آن
حل همگن معادله حرکت ارتعاش آزاد با میرایی لزجی پیشتر به صورت زیر محاسبه گردید:
𝑚�̈� + 𝑐�̇� + 𝑘𝑥 = 0
𝑥ℎ(𝑡) = 𝑋1𝑒−ζ𝜔𝑛𝑡 sin (√1− ζ
2𝜔𝑛𝑡 + 𝜑1)
ت میرایی لزجیمقایسه حرکت با انواع متفاو

44
گونه که پیشتر نشان داده شد، حل همگن تحت هر سه شرایط )زیرمیرایی، میرایی بحرانی و فوق میرایی( و نیز تحت همان
کند )شکل الف(.میرا شده و به سمت صفر میل میتمامی شرایط اولیه با زمان
شود که بیانگر شرایط نزدیک می 𝑥𝑝(𝑡)یژه بنابراین پس از گذشت مدت زمان کوتاهی، حل عمومی معادله حرکت به حل و
باشد )شکل ب و ج(حل پایدار می
)شکل ج( )شکل ب( )شکل الف(
، 𝑘حرکت گذرا به شود. نرخ زوال رود )بخش ارتعاش آزاد(، گذرا نامیده میآن بخشی از حرکت که به علت میرایی از بین می
𝑐 و𝑚 توان حرکت گذرا را نادیده گرفت و تنها حل ویژه را به عنوان پاسخ حالت پایدار تحت نیروی بستگی دارد. بنابراین می
هارمونیک مورد بررسی قرار داد.
سیستم میرا تحت نیروی هارمونیکحالت پایدار پاسخ
𝐹(𝑡)اگر نیروی تحریک کننده به صورت = 𝐹0 sin𝜔𝑡 :در نظر گرفته شود
𝑚�̈� + 𝑐�̇� + 𝑘𝑥 = 𝐹0 sin𝜔𝑡
حل ویژه معادله فوق یک نوسان پایدار با همان فرکانس محرک است. اگر حل ویژه را به صورت زیر در نظر بگیریم:
𝑥𝑝(𝑡) = 𝑋 sin(𝜔𝑡 − 𝜑) 𝑋 دامنه نوسان
𝜑 زاویه فاز تغییر مکان نسبت به نیروی محرک
قرار دادن حل ویژه در معادله حرکت سیستم خواهیم داشت:با
−𝑚𝜔2𝑋 sin(𝜔𝑡 − 𝜑) + 𝑐𝜔𝑋 cos(𝜔𝑡 − 𝜑) + 𝑘𝑋 sin(𝜔𝑡 − 𝜑) =𝐹0 sin𝜔𝑡
−𝑚𝜔2𝑋 sin𝜔𝑡 cos𝜑 +𝑚𝜔2𝑋 cos𝜔𝑡 sin 𝜑 + 𝑐𝜔𝑋 cos 𝜔𝑡 cos𝜑 +𝑐𝜔𝑋sin 𝜔𝑡 sin𝜑 + 𝑘𝑋 sin𝜔𝑡 cos𝜑
−𝑘𝑋 cos𝜔𝑡 sin 𝜑 = 𝐹0 sin𝜔𝑡
(−𝑚𝜔2𝑋 cos𝜑 + 𝑐𝜔𝑋 sin 𝜑 + 𝑘𝑋 cos𝜑)sin𝜔𝑡 + (𝑚𝜔2𝑋 sin 𝜑 + 𝑐𝜔𝑋 cos𝜑 − 𝑘𝑋 sin 𝜑)cos 𝜔𝑡
= 𝐹0 sin𝜔𝑡
→ {−𝑚𝜔2𝑋 cos 𝜑 + 𝑐𝜔𝑋 sin 𝜑 + 𝑘𝑋 cos 𝜑 = 𝐹0
𝑚𝜔2𝑋 sin 𝜑 + 𝑐𝜔𝑋 cos 𝜑 − 𝑘𝑋 sin 𝜑 = 0 → tan 𝜑 =𝑐𝜔
𝑘 − 𝑚𝜔2
𝑋 =𝐹0
√(𝑘 −𝑚𝜔2)2 + (𝑐𝜔)2
𝜑 = 𝑡𝑎𝑛−1 𝑐𝜔
𝑘 −𝑚𝜔2

45
باشد:نمایش فازوری عبارات معادله حرکت به صورت زیر می
−𝑚𝜔2𝑋 sin(𝜔𝑡 − 𝜑) → 𝑚𝜔2𝑋 𝑒𝑖(𝜋−𝜑)
𝑐𝜔𝑋 cos(𝜔𝑡 − 𝜑) → 𝑐𝜔𝑋𝑒𝑖(𝜋 2⁄ −𝜑)
𝑘𝑋 sin(𝜔𝑡 − 𝜑) → 𝑘𝑋𝑒𝑖(−𝜑)
𝐹0 sin𝜔𝑡 → 𝐹0
توان به صورت زیر نیز تبدیل نمود:جلوتر است نمایش فازوری را می 𝑥درجه از 90چون نیروی خارجی به اندازه
𝑚𝜔2𝑋 𝑒𝑖(𝜋) 𝑐𝜔𝑋𝑒𝑖(𝜋 2⁄ ) 𝑘𝑋𝑒𝑖(0) 𝐹0𝑒
𝜑
𝑋 و𝜑 توان با تقسیم بر را می𝑘 :به صورت زیر نوشت
𝑋 =
𝐹0𝑘
√(1−𝑚𝜔2
𝑘)
2+ (𝑐𝜔𝑘)
2
tan𝜑 =
𝑐𝜔𝑘
1−𝑚𝜔2
𝑘
ا استفاده از تعاریف اولیهب
𝜔𝑛 = √𝑘
𝑚→𝑚𝜔2
𝑘=𝜔2
𝑘 𝑚⁄= (
𝜔
𝜔𝑛)
2
𝑐𝑐 = 2𝑚𝜔𝑛
ζ =c
𝑐𝑐
𝑐𝜔
𝑘=c
𝑐𝑐
𝑐𝑐𝜔
𝑘= 2ζ
𝜔
𝜔𝑛
شوند:به صورت زیر تبدیل می 𝜑و 𝑋بعد برای عبارات بی

46
𝑋𝑘
𝐹0=
1
√[1− ( 𝜔𝜔𝑛)
2]2+ [2ζ (
𝜔𝜔𝑛)]
2
tan𝜑 =2ζ (
𝜔𝜔𝑛)
1− ( 𝜔𝜔𝑛)
2
𝑋𝑘)بعد با توجه به روابط باال دامنه بی 𝐹0⁄ 𝜔تنها تابعی از (𝜑)و فاز ( 𝜔𝑛⁄ وζ باشند که این موضوع در شکل زیر هم به می
شود.وضوح دیده می
ضریب میرایی تاثیر زیادی بر دامنه و زاویه فاز در ناحیه فرکانس نزدیک که در شکل زیر نشان داده شده است، گونههمان
رزونانس دارد.
𝜔در حالتی که میرایی وجود نداشته باشد در = 𝜔𝑛 .به تشدید یا رزونانس خواهید انجامید که قابل انتظار است
𝜔 → 𝜔𝑛 و ζ = 0 ⇒𝑋𝑘
𝐹0→ 𝜑 و ∞ →
𝜋
2
𝑋𝑘مخرج کسر در حالتی که میرایی وجود داشته باشد 𝐹0⁄ هرگز صفر نخواهد شد زیرا مجموع دو عدد مثبت غیر صفر است
𝜔همچنان در 𝜑اما زاویه فاز = 𝜔𝑛 به سمت زاویه𝜋 میل خواهد کرد. ⁄2
𝜔در مقادیر بسیار کم 𝜔𝑛⁄ ≪ شود. می 𝜑و میرایی کم هستند که این موضوع منجر به زاویه کوچک هر دو نیروی اینرسی 1
:)شکل الف( در این صورت نیروی وارده تقریباً برابر نیروی فنر خواهد بود

47
𝜔
𝜔𝑛≪ 1 ⇒ 1− (
𝜔
𝜔𝑛)
2→ 2ζ و 1 (
𝜔
𝜔𝑛) → 0 ⇒
[1 − (𝜔
𝜔𝑛)
2]
2
+ [2ζ (𝜔
𝜔𝑛)]
2→ 1
2ζ (𝜔𝜔𝑛)
1− ( 𝜔𝜔𝑛)
2 → 0
}
⇒ {
𝑋𝑘
𝐹0→ 1
𝜑 → 0
𝜔در 𝜔𝑛⁄ = خواهد شد. در این حالت نیروی اینرسی که بزرگتر از حالت قبل است با نیروی فنر متعادل °90زاویه فاز 1
گردد:نس از رابطه زیر محاسبه می. دامنه رزونا)شکل ب( گردد در حالی که نیروی وارده بر نیروی میرایی غلبه نموده استمی
𝜔
𝜔𝑛→ 1 ⇒ 1− (
𝜔
𝜔𝑛)
2→ 2ζ و 0 (
𝜔
𝜔𝑛) → 2ζ ⇒
[1 − (𝜔
𝜔𝑛)
2]
2
+ [2ζ (𝜔
𝜔𝑛)]
2→ 4ζ
2
2ζ (𝜔𝜔𝑛)
1− ( 𝜔𝜔𝑛)
2 → ∞
}
⇒
{
𝑋𝑘
𝐹0→
1
2ζ
𝜑 →𝜋
2
𝑋𝑟 =𝐹0
2𝑘ζ=𝐹0𝑐𝜔𝑛
𝜔
𝜔𝑛→ →ζ و 1 0} ⇒ {
𝑋𝑘
𝐹0→ ∞
𝜑 →𝜋
2
𝜔به ازای مقادیر بزرگ 𝜔𝑛⁄ نزدیک و نیروی خارجی تقریباً به طور کامل صرف خنثی سازی نیروی بزرگ °180زاویه فاز به
شود )شکل ج(اینرسی می
𝜔
𝜔𝑛≫ 1 ⇒ 1− (
𝜔
𝜔𝑛)
2→ −(
𝜔
𝜔𝑛)
2 ⇒
[1 − (𝜔
𝜔𝑛)
2]
2
+ [2ζ (𝜔
𝜔𝑛)]
2→ ∞
2ζ (𝜔𝜔𝑛)
1− ( 𝜔𝜔𝑛)
2 → 0−
}
⇒ {
𝑋𝑘
𝐹0→ 0
𝜑 → 𝜋
𝜔
𝜔𝑛< 1
𝜔
𝜔𝑛= 1
𝜔
𝜔𝑛> 1
)شکل ج( )شکل ب( )شکل الف(

48
𝜔نسبت به 𝑋نه برای دام بعدبیاگر از معادله 𝜔𝑛⁄ ی مقدار ااراد که دامنه به ازای مقدار زیر دتوان نشان دمشتق بگیریم می
بیشینه خواهد بود:
𝑋𝑘
𝐹0=
1
√[1− ( 𝜔𝜔𝑛)
2]2+ [2ζ (
𝜔𝜔𝑛)]
2
𝑟=𝜔
𝜔𝑛
→ 𝑋𝑘
𝐹0=
1
√[1− 𝑟2]2 + [2ζ𝑟]2
𝑑
𝑑𝑟(𝑋𝑘
𝐹0) = 0 → 𝑟 =
𝜔
𝜔𝑛= √1− 2ζ
2
0) شودمقدار بیشینه دامنه از رابطه زیر محاسبه می < ζ < 1 √2⁄ )
𝑋𝑟 (II)معادله =
𝐹0𝑘
2ζ√1− ζ2
گردد:در این مقدار بیشینه زاویه فاز از رابطه زیر محاسبه می
(III)معادله tan𝜑 =
√1− 2ζ2
ζ
ζو این تعریف رزونانس دامنه است. با توجه شود که اگر > 1 𝜔باشد ماکزیمم دامنه در ⁄2√ 𝜔𝑛 = اتفاق خواهد افتاد ⁄0
که در شکل نیز مشخص است.
𝜔همان گونه که پیشتر نیز بدان اشاره گردید، اگر 𝜔𝑛 = 𝜑باشد ⁄1 = 𝜋 𝑋𝑟و خواهد بود ⁄2 = 𝐹0 2𝑘ζ⁄ خواهد بود و این
خواهد بود. فازتعریف رزونانس
ζها میرایی بسیار کوچک است از آنجایی که در بیشتر سیستم < را به صورت زیر ساده نمود: (III)و (II)و معادالت 0/1𝜔
𝜔𝑛≈ 1 ⇒ 𝑋𝑟 =
𝐹0
2𝑘ζtan𝜑 و =
1
ζ
ها یروی متناظر با رزونانس دامنه و رزونانس فاز برابر هستند و الزم نیست بین آنبنابراین به ازای میرایی کوچک، فرکانس ن
( با 𝜔افتد که فرکانس تحریک )تمایزی قایل شود. این بدان معنی است که تحت این شرایط، رزونانس زمانی اتفاق می
فرکانس طبیعی سیستم برابر شود.
تواند خیلی زیاد باشد اگر که میرایی بسیار ناچیز باشد. دامنه نیرو در فنر در حالت رزونانس نیروی موجود در اجزا سیستم می
شود:به صورت زیر محاسبه می
𝐹𝑟 = 𝑘𝑋𝑟 = 𝑘𝐹0
2𝑘ζ=𝐹0
2ζ
سیستم میرا تحت نیروی هارمونیکی کلپاسخ
را به صورت زیر بیان نمود: توان معادله دیفرانسیل حرکت و جواب کامل آن شامل جواب گذرابه طور خالصه می
�̈� + 2ζ𝜔𝑛�̇� + 𝜔𝑛2𝑥 =
𝐹0𝑚sin𝜔𝑡

49
𝑥(𝑡) =𝐹0𝑘
sin(𝜔𝑡 − 𝜑)
√[1− ( 𝜔𝜔𝑛)
2]2+ [2ζ (
𝜔𝜔𝑛)]
2
+ 𝑋1𝑒−ζ𝜔𝑛𝑡 sin (√1− ζ
2𝜔𝑛𝑡 + 𝜑1)
ادله )جمله سمت چپ( بیانگر حل ویژه معادله و بخش دوم )جمله سمت راست( بیانگر حل در عبارت باال بخش اول از حل مع
باشد.همگن معادله حرکت می
با اعمال شرایط اولیه خواهیم داشت:
𝑥(𝑡 = 0) = 𝑥0
�̇�(𝑡 = 0) = �̇�0
tan𝜑1 =𝜔𝑑(𝑥0 + 𝑋 sin𝜑)
�̇�0 + ζ𝜔𝑛𝑥0 + ζ𝜔𝑛𝑋 sin𝜑 − 𝑋𝜔 cos𝜑
𝑋1 = √(𝑥0 + 𝑋 sin𝜑)2 +1𝜔𝑑
2 (�̇�0 + ζ𝜔𝑛𝑥0 + ζ𝜔𝑛𝑋 sin𝜑 − 𝑋𝜔 cos𝜑)2
پاسخ رزونانس سیستم به نیروهای هارمونیک در حالت گذرا
می معادله را مجدداً بررسی برای درک بهتر طبیعت پاسخ رزونانس سیستم به نیروهای هارمونیک الزم است که پاسخ عمو
نماییم:
𝑥(𝑡) =𝐹0𝑘
sin(𝜔𝑡 − 𝜑)
√[1− ( 𝜔𝜔𝑛)
2]2+ [2ζ (
𝜔𝜔𝑛)]
2
+ 𝑋1𝑒−ζ𝜔𝑛𝑡 sin (√1− ζ
2𝜔𝑛𝑡 + 𝜑1)
𝜔در حالت رزونانس 𝜔𝑛 = 𝜑و ⁄1 = 𝜋 شود:ه میاست پس معادله فوق به صورت زیر ساد ⁄2
𝑥(𝑡) =𝐹0𝑘
cos𝜔𝑛𝑡
2ζ+ 𝑋1𝑒
−ζ𝜔𝑛𝑡 sin (√1− ζ2𝜔𝑛𝑡 + 𝜑1)
توان رابطه باال را به صورت زیر نوشت:با فرض شرایط اولیه جابجایی صفر و سرعت اولیه صفر می
𝑥(𝑡 = 0) = 0
�̇�(𝑡 = 0) = 0
𝑥(𝑡) )معادله الف( =1
2ζ
𝐹0𝑘
{
𝑒−ζ𝜔𝑛𝑡
[
ζ
√1− ζ2sin𝜔𝑑𝑡 + cos𝜔𝑑𝑡
]
− cos𝜔𝑛𝑡
}
ها، جمله شامل سینوس اثر ناچیزی در دامنه خواهد داشت و به عالوه فرکانس میرا برای مقدار میرایی مورد انتظار در سیستم
نابراین خواهیم داشت:خواهد بود. ب 𝜔𝑛تقریباً برابر فرکانس نامیرای 𝜔𝑑شده
𝑥𝑟(𝑡) (IV)معادله ≈1
2ζ
𝐹0𝑘(𝑒−ζ𝜔𝑛𝑡 − 1) cos𝜔𝑛𝑡
ζ)برای میرایی صفر = نامعین خواهد بود ولی با به کار بردن قاعده هوپیتال پاسخ رزونانس بدون میرایی به )الف(معادله (0
گردد:صورت زیر خالصه می

50
𝑥𝑟(𝑡) (V)معادله =𝐹02𝑘( 𝑠𝑖𝑛𝜔𝑛𝑡 −𝜔𝑛t cos𝜔𝑛𝑡)
.در ادامه ترسیم گردیده است Vو IVنمودار معادالت
𝜋𝐹0در حالت نامیرا، پاسخ به میزان Vبا توجه به معادله 𝑘⁄ کند.در هر سیکل شروع به رشد می
هایی که الزم است که دامنه شود. تعداد سیکلسخ رزونانس محدود میدر صورت وجود میرایی دامنه پا IVبا توجه به معادله
رزونانس به حداکثر اوج برسد به مقدار میرایی بستگی دارد.
(IV)معادله دامنه پاسخ رزونانس میرا (V)معادله دامنه پاسخ رزونانس نامیرا
نامیزانی دوار
میراکننده را که مقید شده –فنر –های دوار یکی از منابع متداول تحریک ارتعاش است. یک سیستم جرم ماشین نامیزانی در
در جهت قائم حرکت کند و به وسیله ماشین دوار نامیزان نیز تحریک شده است در نظر بگیرید )شکل زیر(.

51
چرخد. می 𝜔ای نمایش داده شده است که با سرعت زاویه 𝑒و فاصله خارج از مرکز 𝑚نامیزانی به وسیله جرم خارج از مرکز
𝑀)تغییر مکان جرم 𝑥اگر −𝑚) از حالت تعادل استاتیکی باشد، تغییر مکان مطلق𝑚 :عبارتست از
بنابراین معادله حرکت به صورت زیر خواهد بود:
𝐹0 معادله باال مشابه معادالت حرکت سیستم ارتعاشی تحت نیروی هارمونیک sin𝜔𝑡 است که در آن𝐹0 با𝑚𝑒𝜔2 جایگزین
توان به صورت زیر نوشت:شده است بنابراین دامنه و فاز این سیستم را می
توان به صورت زیر نوشت:بعد روابط زیر را نیز میشکل بی
د:اندامنه و فاز برای نامیزانی دوار مورد نظر در شکل زیر ترسیم گردیده

52
باشد:حل کامل معادله حرکت مشتمل بر حل گذرا نیز به صورت زیر می
مثال:
فنر زیر بکار برده –دو وزنه نامیزان با چرخش خالف جهت هم به عنوان محرک برای ایجاد نوسان اجباری سیستم جرم
ای رخش به طور قابل مالحظهگردد. وقتی که سرعت چثبت می 𝑐𝑚 0/6اند. با تغییر سرعت چرخش، دامنه تشدید شده
کند. ضریب میرایی سیستم را تعیین میل می𝑐𝑚 0/08شود، دامنه نوسان به مقدار ثابت نسبت به حالت تشدید افزوده می
نمایید.
حل:
گردد:دامنه تشدید از رابطه زیر تعیین می
𝑋𝑟 =
𝑚𝑒𝑀
2ζ= 0/6 𝑐𝑚
𝜔در حالتی که ≫ 𝜔𝑛 باشد
𝜔
𝜔𝑛≫ 1 ⇒ 1− (
𝜔
𝜔𝑛)
2→ −(
𝜔
𝜔𝑛)
2 ⇒
[1 − (𝜔
𝜔𝑛)
2]
2
+ [2ζ (𝜔
𝜔𝑛)]
2→ (
𝜔
𝜔𝑛)
2
2ζ (𝜔𝜔𝑛)
1− ( 𝜔𝜔𝑛)
2 → 0−
}
⇒ {
𝑋1𝑚𝑒𝑀
→ 1
𝜑 → 𝜋
𝜔
𝜔𝑛≫ 1 ⇒
𝑋1𝑚𝑒𝑀
≈ 1 → 𝑋1 ≈𝑚𝑒
𝑀→ 0/08 =
𝑚𝑒
𝑀
𝑋𝑟𝑋1=
𝑚𝑒𝑀
2ζ𝑚𝑒𝑀
=1
2ζ→
0/60/08 =
1
2ζ→ ζ = 0/066

53
لنگی محورهای دوار
زنند. این پدیده از عوامل ای لنگ میکنند و با وضع پیچیدههای مشخصی حالت کمانی پیدا میمحورهای دوار در سرعت
ها و غیره ناشی گاهر محور، نیروهای ژیروسکوپی، اصطکاک سیال در تکیهمختلفی نظیر جرم نامیزان، میرایی پسماند د
شود.می
گاه نگه داشته شده است. را در نظر بگیرید که به صورت متقارن روی محوری قرار دارد و به وسیله دو تکیه 𝑚دیسکی به جرم
ها صفحه دیسک ه است. خط مرکزی یاتاقانواقع شد 𝑠از مرکز هندسی دیسک 𝑒مرکز جرم دیسک در فاصله 𝐺مطابق شکل
𝑟کند و مرکز محور به اندازه قطع می 𝑜را در نقطه = 𝑜𝑠 .خم شده است
لنگی سینکرون
کنیم که این مقدار ثابت باشد:است. فرض می برابر 𝜔با سرعت چرخش دیسک �̇�در حالت لنگی سینکرون سرعت لنگی
�̈� = 0
:د رحالت پایدار
�̇� = �̈� = 0

54
(𝑘
𝑚− 𝜔2) 𝑟 = 𝑒𝜔2 cos𝜑
𝑐
𝑚𝜔𝑟 = 𝑒𝜔2 sin𝜑
} → tan𝜑 =
(𝑘𝑚− 𝜔2) 𝑟
𝑒𝜔2𝑐𝑚𝜔𝑟
𝑒𝜔2
=
𝑐𝑚𝜔
(𝑘𝑚 − 𝜔
2)
توان نوشت:از مثلث برداری شکل قبل می
گردد:یز به صورت زیر محاسبه میبا جایگذاری در معادله اول دامنه ن
𝑟 =𝑒𝜔2
(𝑘𝑚 − 𝜔
2)cos𝜑
.دهددیسک را تحت سه وضعیت مختلف سرعت دورانی نشان می –شکل زیر سیستم محور

55
𝜔 = 𝜔𝑛 → {𝑟 =
𝑒
2ζ
tan 𝜑 → ∞ ⇒ 𝜑 → 𝜋 2⁄
𝜔های خیلی باال در سرعت ≫ 𝜔𝑛 جرم مرکز𝐺 به سمت نقطه ثابت𝑜 کند.میل می
𝜔 ≫ 𝜔𝑛 ⇒ 𝜑 → 𝜋 و 𝑟 → 𝑒
𝜔 در حالتی که > 𝜔𝑛 :باشد
𝜔 > 𝜔𝑛 ⇒ tan𝜑 < 0 ⇒ 𝜋 2⁄ < 𝜑 < 𝜋
𝜔 در حالتی که ≪ 𝜔𝑛 :باشد
𝜔 ≪ 𝜔𝑛 ⇒ 𝑟 → 0 ⇒ tan𝜑 → 0 ⇒ 𝜑 → 0
𝜔 < 𝜔𝑛 ⇒ tan𝜑 > 0 ⇒ 0 < 𝜑 < 𝜋/2
است. 𝑚𝑒𝜔2سینکرون مشابه معادله ارتعاش اجباری هارمونیک است که در آن نیروی محرک چرخشی معادالت لنگی دوار
مثال:
شوند باید از سرعت بحرانی کنند، هر بار که شروع به حرکت کرده یا متوقف میهایی که باالی سرعت بحرانی کار میتوربین
اتفاق بیافتد، معادله حرکت برای رشد دامنه بر حسب 𝑟0در دامنه 𝜔𝑛تشدید عبور نمایند. با فرض این که سرعت بحرانی
زمان را تعیین نمایید. میرایی را صفر در نظر بگیرید.
حل:
کنیم که مانند لنگی سینکرون فرض می
�̇� = 𝜔 = ثابت
باید حفظ شوند مگر این که نشان داده شوند که صفر هستند. �̈�و �̇�ولی عبارات
نامیرا: در حالت
𝑐 = 0
بنابراین:

56
عبارتست از: 𝑟0حل معادله دوم با خمش اولیه
شویم که:با دو بار مشتق گیری از رابطه باال متوجه می
�̈� = 0 توان به صورت زیر نوشت:بنابراین معادله باال را می
برابر صفر باشند بنابراین: 𝑡رایب چون سمت راست معادله ثابت است معادله فوق تنها زمانی جواب خواهد داشت که ض
(Iمعادله )
در نتیجه تنها عبارت زیر از معادله باقی خواهد ماند:
(IIمعادله )
𝜔به ازای = √𝑘 𝑚⁄ معادله(I) برقرار خواهد بود اما معادله(𝐼𝐼) :زمانی برقرار خواهد شد که
cos𝜑 = 0 → 𝜑 =𝜋
2
𝜔بنابراین در حالت = √𝑘 𝑚⁄ زاویه فاز برابر ،یا حالت تشدید𝜋
2گردد که در شکل خواهد بود و دامنه با رابطه زیر بیان می
بعدی نشان داده شده است.
𝑟 =𝑒𝜔
2 𝑡 + 𝑟0
مثال:
چرخدنده بر حسب پارامترهای سیستم محاسبه کنید. –ها را برای سیستم محور نیروی عکس العمل یاتاقان
حل:
ها برابر کند. بنابراین نیروی وارد بر یاتاقانرا طی می 𝑂𝐺ای به شعاع یک مسیر دایره Oسیستم حول نقطه ثابت مرکز جرم
:خواهد بود با

57
𝐹 = 𝑚(𝑂𝐺)𝜔2
𝑟 =𝑒 (𝜔𝜔𝑛)
2
√[1− ( 𝜔𝜔𝑛)
2]2+ [2ζ (
𝜔𝜔𝑛)]
2
cos𝜑 =1− ( 𝜔𝜔𝑛
)2
√[1− ( 𝜔𝜔𝑛)
2]2+ [2ζ (
𝜔𝜔𝑛)]
2
𝑂𝐺2 = 𝑟2 + 𝑒2 − 2𝑟 × 𝑒 𝑐𝑜𝑠 𝜑 پس از جایگزینی خواهیم داشت:
𝐹 = 𝑚𝑒𝜔2√
1+ [2ζ (𝜔𝜔𝑛)]
2
[1− ( 𝜔𝜔𝑛)
2]2+ [2ζ (
𝜔𝜔𝑛)]
2
انرژی تلف شده توسط میرایی
شود:از معادله زیر محاسبه می 𝐹𝑑کل در اثر نیروی میرایی انرژی تلف شده در هر سی
𝑊𝑑 = ∮𝐹𝑑 𝑑𝑥
𝐹𝑑فنر با میرایی لزجی –در سیستم جرم = 𝑐�̇� شود:تغییر مکان به صورت زیر تعریف می
𝑥 = 𝑋 sin(𝜔𝑡 − 𝜑)
�̇� = 𝜔𝑋 cos(𝜔𝑡 − 𝜑)
𝑑𝑥 = 𝜔𝑋 cos(𝜔𝑡 − 𝜑)𝑑𝑡
𝑊𝑑 = ∮𝐹𝑑 𝑑𝑥 = ∫ 𝑐𝜔2𝑋2 cos2(𝜔𝑡 − 𝜑)2𝜋 𝜔⁄
0𝑑𝑡 = 𝜋𝑐𝜔2𝑋2
𝑊𝑑 = 𝜋𝑐𝜔𝑋2 = 2ζ𝜋𝑘𝑋2
𝐹𝑑 = 𝑐�̇� = 𝑐𝜔𝑋 cos(𝜔𝑡 − 𝜑) →𝐹𝑑𝑐𝜔𝑋
= cos(𝜔𝑡 − 𝜑)
𝑥
𝑋= sin(𝜔𝑡 − 𝜑)
(𝐹𝑑𝑐𝜔𝑋
)2
+ (𝑥
𝑋)
2= 1
گردد.لف شده در هر سیکل به وسیله سطح محصور شده توسط بیضی مشخص میانرژی ت
مساحت بیضی = π نصف قطر بزرگ× نصف قطر کوچک×
𝑊𝑑 = 𝜋𝐹𝑑𝑋
شود:به صورت زیر محاسبه می 𝐹𝑡نیز اضافه شود نیروی 𝑘𝑥نیروی فنر 𝐹𝑑اگر به
𝐹𝑡 = 𝑘𝑥 + 𝑐�̇� → 𝐹𝑡 − 𝑘𝑥 = 𝑐�̇� = 𝑐𝜔𝑋 cos(𝜔𝑡 − 𝜑) →𝐹𝑡 − 𝑘𝑥
𝑐𝜔𝑋= (𝜔𝑡 − 𝜑)
(𝐹𝑡 − 𝑘𝑥
𝑐𝜔𝑋)
2
+ (𝑥
𝑋)
2= 1
𝐹𝑡 = 𝑘𝑥 ± 𝑐𝜔√𝑋2 − 𝑥2

58
𝐹انرژی تلف شده توسط نیروی = 𝐹0 sin𝜔𝑡 که در جابجایی𝑥 = 𝑋 sin(𝜔𝑡 − 𝜑) کند از رابطه زیر محاسبهعمل می
شود:می
𝑊𝑑 = 𝜋𝐹0𝑋 sin𝜑 مثال:
𝐹نیروی = 10 sin 𝜋𝑡 در تغییر مکان𝑥 = 2 sin(𝜋𝑡 − 𝜋 6⁄ کند. مطلوبست:عمل می (
ثانیه اول 6الف( کار انجام شده در طول
ثانیه اول 0/5ب( کار انجام شده در
حل:
𝑊𝑑 = 𝜋𝐹0𝑋 sin𝜑
𝜏 = 2 𝑠 دور کامل ایجاد گردیده است و کار انجام شده برابر است با: 3ثانیه 6 ثانیه است پس در مدت 2چون دوره تناوب
شود:ثانیه محاسبه می 0/5و 0گیری عبارت کار بین کار انجام شده در قسمت )ب( توسط انتگرال
𝑊𝑑 = ∮𝐹𝑑 𝑑𝑥 = ∫ 𝐹0 sin𝜔𝑡𝑡
0× 𝜔𝑋 cos(𝜔𝑡 − 𝜑)𝑑𝑡 = 𝜔𝑋𝐹0∫ sin𝜔𝑡
𝑡
0× (cos𝜔𝑡 cos𝜑 + sin𝜔𝑡 sin 𝜑)𝑑𝑡
𝑊𝑑 = 𝜔𝑋𝐹0 [cos 𝜑∫ sin𝜔𝑡𝑡
0cos𝜔𝑡𝑑𝑡 + sin𝜑∫ sin2𝜔𝑡
𝑡
0𝑑𝑡]

59
میرایی لزجی معادل
گردد:در مورد میرایی لزجی، دامنه در حالت رزونانس از رابطه زیر محاسبه می
𝑋𝑟 =𝐹0𝑐𝜔𝑛
در 𝑐𝑒𝑞ای وجود ندارد ولی این امکان وجود دارد که با قرار دادن میرایی معادل در سایر انواع میرایی، چنین عبارت ساده
معادله باال دامنه حالت رزونانس را تقریب زد.
میرایی غیرلزجی با میرایی معادل از برابر قرار دادن انرژی تلف شده به وسیله میرایی لزجی و انرژی تلف شده توسط نیروی
شود:فرض حرکت هارمونیک تعیین می
𝑊𝑑 = 𝜋𝑐𝑒𝑞𝜔𝑋2
𝑋𝑟 =𝐹0
𝑐𝑒𝑞𝜔𝑛
مثال:
کنند با متر بر ثانیه( در سیاالتی مانند آب یا هوا حرکت می 20تا 3های متوسط )نیروی میرایی برای اجسامی که با سرعت
𝐹𝑑رابطه = ±𝑎�̇��̇�)عالمت منفی برای شود. میرایی لزجی معادل و دامنه رزونانس را محاسبه کنید.بیان می 2 > و 0
�̇�عالمت مثبت برای < گیرد.مورد استفاده قرار می 0
حل:
𝑥با فرض = 𝑋 sin(𝜔𝑡 − 𝜑) :انرژی تلف شده در هر سیکل عبارتست از
𝑊𝑑 = 2∫ (𝑎�̇�2)𝑥
−𝑥
𝑑𝑥 = 2∫ 𝑎𝜔2𝑋3𝑐𝑜𝑠3(𝜔𝑡 − 𝜑)𝜋 2⁄ +𝜑
−𝜋 2⁄ +𝜑𝑑(𝜔𝑡)
= 2𝑎𝜔2𝑋3∫ 𝑐𝑜𝑠 (𝜔𝑡 − 𝜑)[1− 𝑠𝑖𝑛2(𝜔𝑡 − 𝜑)]𝜋 2⁄ +𝜑
−𝜋 2⁄ +𝜑𝑑(𝜔𝑡)
= 2𝑎𝜔2𝑋3 [𝑠𝑖𝑛 (𝜔𝑡 − 𝜑) −13 𝑠𝑖𝑛
3(𝜔𝑡 − 𝜑)]−𝜋 2⁄ +𝜑
𝜋 2⁄ +𝜑
= 2𝑎𝜔2𝑋3 [sin (𝜋
2) −13 sin
3 (𝜋
2) − sin (−𝜋
2) +13 sin
3 (−𝜋
2)] = 2𝑎𝜔2𝑋3 (1−13+ 1−
13)
=83 𝑎𝜔
2𝑋3
𝑊𝑑 = 𝜋𝑐𝑒𝑞𝜔𝑋2 =
83 𝑎𝜔
2𝑋3 → 𝑐𝑒𝑞 =8
3𝜋 𝑎𝜔𝑋
𝜔در حالت رزونانس = 𝜔𝑛 :است
𝑋𝑟 =𝐹0
𝑐𝑒𝑞𝜔𝑛=
𝐹08
3𝜋 𝑎𝜔𝑛𝑋𝑟 × 𝜔𝑛→ 𝑋𝑟
2 =3𝜋𝐹0
8𝑎𝜔𝑛2 → 𝑋𝑟 = √
3𝜋𝐹08𝑎𝜔𝑛2
مثال:
میرایی لزجی معادل را برای میرایی کولمب پیدا نمایید.
حل:

60
𝑥کولمب نیز سینوسی و برابر با فرض کنید تحت یک محرک اجباری سینوسی، تغییر مکان سیستمی با میرایی = 𝑋 sin𝜔𝑡
برابر است با: 𝐹𝑑است. در این حالت کار انجام شده در هر سیکل به وسیله نیروی کولمب
𝑊𝑑 = 𝐹𝑑 × 4𝑋
𝑊𝑑 = 𝜋𝑐𝑒𝑞𝜔𝑋2 = 𝐹𝑑 × 4𝑋 → 𝑐𝑒𝑞 =
4𝐹𝑑𝑋𝜋𝜔𝑋2 =
4𝐹𝑑𝜋𝜔𝑋
𝑋𝑟 =𝐹0
𝑐𝑒𝑞𝜔𝑛=
𝐹04𝐹𝑑𝜋𝜔𝑋 × 𝜔𝑛
→ 𝑋𝑟 =𝐹0𝜋𝜔𝑋𝑟
4𝐹𝑑𝜔𝑛
گردد. از نظر فیزیکی این بدان معنی است که دامنه رزونانس برای حالت از طرفین حذف می 𝑋𝑟شود چنانچه مالحظه می
میرایی کولمب تعریف نشده است.
در رابطه مربوطه به صورت زیر محاسبه نمود: 𝑐𝑒𝑞توان با جاگذاری دامنه ارتعاش اجباری را می
𝑋
𝛿𝑠𝑡=
√1− (4𝐹𝑑𝜋𝐹0)
2
1− ( 𝜔𝜔𝑛)
2
چون دامنه یک کمیت حقیقی است حل فوق تنها زمانی معتبر است که:
1− (4𝐹𝑑𝜋𝐹0)
2
> 0 →4𝐹𝑑𝜋𝐹0
< 1 →𝐹0𝐹𝑑>
4𝜋
مثال:
نیروی اصطکاک است. 𝐹𝑑ثابت فنر و 𝑘ضریب میرایی لزجی، 𝑐در سیستم ارتعاشی زیر دامنه رزونانس را تعیین نمایید.

61
حل:
𝑐𝑒𝑞 =∑𝑊
𝜋𝜔𝑋2 =4𝐹𝑑𝑋 + 𝜋𝑐𝜔𝑋2
𝜋𝜔𝑋2 =4𝐹𝑑 + 𝜋𝑐𝜔𝑋
𝜋𝜔𝑋 =
4𝐹𝑑𝜋𝜔𝑋
+ 𝑐
𝑋𝑟𝑒𝑠 =𝐹0
𝑐𝑒𝑞𝜔𝑛→ 𝑋𝑟𝑒𝑠 =
𝐹04𝐹𝑑 + 𝜋𝑐𝜔𝑋
𝜋𝜔𝑋 𝜔𝑛
𝜔در حالت رزونانس = 𝜔𝑛 و𝑋 = 𝑋𝑟𝑒𝑠 .است
𝑋𝑟𝑒𝑠 =𝐹0𝜋𝜔𝑛𝑋𝑟𝑒𝑠
(4𝐹𝑑 + 𝜋𝑐𝜔𝑛𝑋𝑟𝑒𝑠 )𝜔𝑛→ 4𝐹𝑑 + 𝜋𝑐𝜔𝑛𝑋𝑟𝑒𝑠 = 𝜋𝐹0 → 𝑋𝑟𝑒𝑠 =
𝜋𝐹0 − 4𝐹𝑑𝜋𝑐𝜔𝑛
→ 𝑋𝑟𝑒𝑠 =𝐹0𝑐𝜔𝑛
−4𝐹𝑑𝜋𝑐𝜔𝑛
=1𝑐𝜔𝑛
(𝐹0 −4𝐹𝑑𝜋)
موازی بودن دو میرا کننده نیز به صورت زیر محاسبه نمود:توان با استفاده از خاصیت میرایی لزجی را می توجه:
𝑐𝑒𝑞 =4𝐹𝑑𝜋𝜔𝑋
+ 𝑐
پاسخ به نیروهای متناوب
توان هر نیروی متناوب را به صورت یک سری از اجزا هارمونیک نوشت. نیروی متناوب را با استفاده از تحلیل فوریه، می
توان به صورت زیر نوشت:می
𝐹(𝑡) =∑𝐹𝑛 sin(𝜔𝑛𝑡 − 𝜑𝑛𝑛
) =∑𝐹𝑛 sin(𝑛𝜔1𝑡 − 𝜑𝑛𝑛
)
باشد:می 𝑛چون معادله حرکت خطی است حل کلی معادله برابر با مجموع حل مربوط به هر
𝑥𝑛(𝑡) =𝐹𝑛 sin(𝜔𝑛𝑡 − 𝜑𝑛)
√(𝑘 − 𝑚𝜔𝑛2)2 + (𝑐𝜔𝑛)2
گردد:اسخ حالت دایمی به وسیله سری زیر بیان میبنابراین پ
𝑥(𝑡) =∑𝑥𝑛(𝑡)
𝑛
شود، اضافه گردد.کلی مقدار فوق باید به ارتعاش آزاد که معموالً در اثر میرایی مستهلک میدر حالت
مثال:
پاسخ حالت دایمی یک سیستم یک درجه آزادی را به موج مربع شکل زیر به دست آورید.
حل:
عبارتست از: Pفوریه برای موج مستطیلی با دامنه سری
𝐹(𝑡) =4𝑃𝜋(sin𝜔1𝑡 +
13 sin 3𝜔1𝑡 +
15 sin5𝜔1𝑡 + ⋯)

62
باشد:پاسخ حالت دایمی به صورت زیر می
𝑥(𝑡) =4𝑃𝜋{
sin(𝜔1𝑡 − 𝜑1)
√(𝑘 − 𝑚𝜔12)2 + (𝑐𝜔1)2
+
13 sin(3𝜔1𝑡 − 𝜑3)
√[𝑘 − 𝑚(3𝜔1)2]2 + (3𝑐𝜔1)2
+
15 sin(5𝜔1𝑡 − 𝜑3)
√[𝑘 − 𝑚(5𝜔1)2]2 + (5𝑐𝜔1)2+⋯}
tan𝜑1 =𝑐𝜔1
𝑘 −𝑚𝜔12 , tan𝜑3 =
3𝑐𝜔1
𝑘 −𝑚(3𝜔1)2, tan𝜑5 =
5𝑐𝜔1
𝑘 −𝑚(5𝜔1)2
گاه متحرکتکیه
𝑚�̈� = −𝑘(𝑥 − 𝑦) − 𝑐(�̇� − �̇�)
𝑧 = 𝑥 − 𝑦
𝑚�̈� + 𝑐�̇� + 𝑘𝑧 = −𝑚�̈� = 𝑚𝜔2𝑌 sin𝜔𝑡
در نتیجه:
𝑧 = Z sin(𝜔 𝑡 − 𝜑 )
𝑍 =𝑚𝜔2𝑌
√(𝑘 − 𝑚𝜔 2)2 + (𝑐𝜔 )2
tan𝜑 =𝑐𝜔
𝑘 −𝑚𝜔 2
𝑥توانیم از رابطه مورد نظر باشد می 𝑥اگر حرکت مطلق جرم یعنی = 𝑧 + 𝑦 .آن را بدست آوریم
توان نوشت:با استفاده از فرم فازوری حرکت هارمونیک می
𝑦 = �̅�𝑒𝑖𝜔𝑡
𝑧 = �̅�𝑒𝑖𝜔𝑡
→ 𝑥 = 𝑦 + 𝑧 = (�̅� + �̅�)𝑒𝑖𝜔𝑡
�̅�که در آن = 𝑌 :است. بنابراین
𝑚�̈� + 𝑐�̇� + 𝑘𝑧 = −𝑚�̈�
�̅� =𝑚𝜔2𝑌
𝑚(𝑖𝜔)2 + 𝑐(𝑖𝜔) + 𝑘
𝑥 = (�̅� + �̅�)𝑒𝑖𝜔𝑡 = (𝑌 +𝑚𝜔2𝑌
−𝑚𝜔2 + 𝑐(𝑖𝜔) + 𝑘) 𝑒𝑖𝜔𝑡 = (
𝑘 −𝑚𝜔2 + 𝑐(𝑖𝜔) + 𝑚𝜔2
−𝑚𝜔2 + 𝑐(𝑖𝜔) + 𝑘)𝑌𝑒𝑖𝜔𝑡

63
𝑥 = (𝑘 + 𝑖𝜔𝑐
𝑘 − 𝑚𝜔 2 + 𝑖𝜔𝑐)𝑌𝑒𝑖𝜔𝑡 = 𝑋𝑒𝑖𝜑𝑒𝑖𝜔𝑡
گردند:دامنه حل حالت پایدار و زاویه فاز از رابطه زیر محاسبه می
|𝑋
𝑌| = √
𝑘2 + (𝜔𝑐)2
(𝑘 − 𝑚𝜔 2)2 + (𝑐𝜔)2= √
1+ [2ζ (𝜔𝜔𝑛)
2]
[1− ( 𝜔𝜔𝑛)
2]
2
+ [2ζ (𝜔𝜔𝑛)
]2
tan𝜑 =𝑚𝑐𝜔
3
𝑘(𝑘 − 𝑚𝜔 2) + (𝑐𝜔)2
مثال:
پیستون را با رابطه 𝑐متصل شده است و از طریق اصطکاک لزجی 𝑘به فنری با سختی 𝑚مطابق شکل سیلندری به جرم
𝑦 = 𝑌 sin𝜔𝑡 مایید.نماید. مقدار دامنه حرکت سیلندر و زاویه فاز آن را نسبت به پیستون محاسبه نجابجا می
حل:
𝑚�̈� = 𝑐(�̇� − �̇�) − 𝑘𝑥 → 𝑚�̈� + 𝑐�̇� + 𝑘𝑥 = 𝑐�̇�
𝑦 = 𝑌𝑒𝑖𝜔𝑡 → �̇� = 𝑌𝑖𝜔𝑒𝑖𝜔𝑡
𝑥 = 𝑋𝑒𝑖(𝜔𝑡+𝜑) = 𝑋𝑒𝑖𝜑𝑒𝑖𝜔𝑡 = �̅�𝑒𝑖𝜔𝑡
(𝑘 − 𝑚𝜔2 + 𝑖𝜔𝑐)�̅� = 𝑖𝜔𝑌
�̅� =𝑖𝜔𝑌
𝑘 −𝑚𝜔2 + 𝑖𝜔𝑐
�̅� =𝑖𝜔𝑌
𝑘 −𝑚𝜔2 + 𝑖𝜔𝑐×𝑘 −𝑚𝜔2 − 𝑖𝜔𝑐
𝑘 − 𝑚𝜔2 − 𝑖𝜔𝑐= 𝑖𝜔𝑌
𝑘 −𝑚𝜔2
(𝑘 − 𝑚𝜔2)2 + (𝜔𝑐)2+
𝜔2𝑐𝑌
(𝑘 − 𝑚𝜔2)2 + (𝜔𝑐)2
𝑖𝜔𝑌𝑘 −𝑚𝜔2
(𝑘 − 𝑚𝜔2)2 + (𝜔𝑐)2+
𝜔2𝑐𝑌
(𝑘 − 𝑚𝜔2)2 + (𝜔𝑐)2= 𝑋𝑒𝑖𝜑
𝑋 =𝜔𝑌
√(𝑘 −𝑚𝜔2)2 + (𝜔𝑐)2
tan𝜑 =𝜔𝑌
𝑘 −𝑚𝜔2
(𝑘 − 𝑚𝜔2)2 + (𝜔𝑐)2
𝜔2𝑐𝑌(𝑘 − 𝑚𝜔2)2 + (𝜔𝑐)2
=𝑘 −𝑚𝜔2
𝜔 𝑐

64
ارتعاش گذرا
پاسخ به ضربه واحد
–شود به طوری که مساحت زیر منحنی نیرو اهی وارد میهنگامی که یک نیروی خیلی بزرگ برای مدت زمان خیلی کوت
.شودنشان داده می �̂�که با نامندای و مساحت محصور شده را ضربه میزمان یک مقدار معین است آن را نیروی ضربه
�̂�حال اگر مقدار ضربه = 𝜖و 1 → 1میل کند، با وجودی که مقدار پالس یعنی 0 𝜖⁄ کند اما یبه سمت بینهایت میل م
مساحت محصور شده هنوز برابر یک است.
شود:تابع دلتای دیراک به صورت زیر تعریف می
𝛿(𝑡 − 𝜉) = {0 𝑡 ≠ 𝜉
1 𝑡 = 𝜉
∫ 𝛿 (𝑡 − 𝜉) 𝑑𝑡∞
−∞
= 1
𝛿(𝑡 − 𝜉)Φ(𝑡) = Φ(𝜉)
ضربه در لحظه صفر وارد شده باشد:چنانچه
𝛿(𝑡) = {0 𝑡 ≠ 0
1 𝑡 = 0
∫ 𝛿(𝑡)𝑑𝑡∞
−∞
= 1
𝐹(𝑡)ای سیستم یک درجه آزادی میرا شده را تحت نیروی ضربه = �̂�𝛿(𝑡) :در نظر بگیرید
𝑚�̈� + 𝑐�̇� + 𝑘𝑥 = �̂�𝛿(𝑡) 𝑥(0)با شرایط اولیه حل معادله فوق = �̇�(0) = باشدبا استفاده از تبدیل الپالس ممکن می 0
𝑚𝑠2𝐿(𝑥) − 𝑚𝑠𝑥(0) − 𝑚�̇�(0) + 𝑐𝑠𝐿(𝑥) − 𝑐𝑥(0) + 𝑘𝐿(𝑥) = �̂�𝐿(𝛿(𝑡)) = �̂� × 1 = �̂�
𝑚𝑠2𝐿(𝑥) + 𝑐𝑠𝐿(𝑥) + 𝑘𝐿(𝑥) = �̂� → 𝐿(𝑥) =�̂�
𝑚𝑠2 + 𝑐𝑠 + 𝑘
:آیدبه دست می به صورت زیراگر از رابطه باال تبدیل الپالس معکوس بگیریم حل معادله
ک ضربه به صورت زیر است:فنر نامیرا با تحری –حل معادله سیستم جرم

65
�̂�شود برای هر دو سیستم میرا و نامیرا با قرار دادن نمایش داده می ℎ(𝑡)پاسخ به ضربه واحد که با = آید:به دست می 1
سیستم میرا
سیستم نامیرا
در حالتی کلی که ضربه مقدار واحد نداشته باشد:
𝑥(𝑡) = �̂� ℎ(𝑡)
تحریک دلخواهپاسخ به
توسط 𝑓(𝑡)ای در نظر گرفت. پاسخ به نیروی دلخواه از نیروهای ضربهای توان به صورت مجموعهرا می 𝑓(𝑡)روی دلخواه نی
شود.شود که بدان انتگرال کانولوشن گفته میانتگرال زیر تعیین می
ا و نامیرا محاسبه گردیده است.پاسخ سیستم به تابع ضربه واحد است که قبالً برای هر دو سیستم میر ℎ(𝑡)که در آن
مثال:
نمایید. تعیین در هر دو حالت میرا و نامیرا رازیر پاسخ سیستم یک درجه آزادی به تحریک پله
حل:
گردد:تابع پله به صورت زیر تعریف می
𝑓(𝑡) = 𝐹0, 𝑡 > 0 برای سیستم نامیرا داریم:

66
گردد:احد با استفاده از انتگرال کانولوشن به صورت زیر محاسبه میپاسخ سیستم نامیرا به تابع پله و
مقدار حداکثر پاسخ به تحریک پله عبارتست از:
𝑥(𝑡) =2𝐹0𝑘
برای سیستم میرا داریم:
توان معادله دیفرانسیل را به صورت زیر خالصه نمود:یا می
𝐹0این حالت حل خصوصی به صورت که حل آن ترکیب دو حل همگن و خصوصی است که در 𝑚𝜔𝑛
است: ⁄2
𝑥(0)با در نظر گرفتن شرایط اولیه = �̇�(0) = خواهیم داشت: 0
که در آن:
تحریک پایه
گاه یک سیستم دینامیکی تحت تاثیر یک حرکت ناگهانی که به وسیله تغییر مکان، سرعت و یا شتاب آن مشخص غالباً تکیه
𝑧گیرد. در این حالت معادله حرکت با فرض می شود، قرارمی = 𝑥 − 𝑦 :به صورت زیر است
شود:ز رابطه زیر تعیین میبرای یک سیستم نامیرا که در ابتدا در حالت سکون است اپاسخ سیستم
مثال:
ت زیر بیان یک سیستم نامیرای جرم و فنر را در نظر بگیرید که در آن حرکت پایه به وسیله یک پالس سرعت به صور
شود:می

67
ای واحد است. پاسخ سیستم را محاسبه نمایید.تابع پله 𝑢(𝑡)در رابطه باال
حل:𝑑
𝑑𝑡𝑢(𝑡) = 𝛿(𝑡)
مثال:
𝑓باشد و نیروی اصطکاک ثابت فنر نشان داده در شکل زیر را در نظر بگیرید که دارای میرایی کولمب می –سیستم جرم
به ازای تحریک پایه مطابق نمودار زیر، پاسخ سیستم و پاسخ بیشینه را بیابید.شود. بدان وارد می
حل:
�̇� = (−𝑣0
𝑡1𝑡 + 𝑣0) 𝑢(𝑡)
�̈� = −𝑣0
𝑡1𝑢(𝑡) + (−
𝑣0
𝑡1𝑡 + 𝑣0) 𝛿(𝑡)
تابع پله واحد است. 𝑢(𝑡)در رابطه باال
𝑚�̈� = −𝑘(𝑥 − 𝑦) − 𝑓, 𝑧 = 𝑥 − 𝑦
𝑚�̈� + 𝑚�̈� = −𝑘𝑧 − 𝑓 → 𝑚�̈� + 𝑘𝑧 = −𝑚�̈� − 𝑓 → → �̈� + 𝜔𝑛2𝑧 = −�̈� −
𝑓
𝑚
𝑧 = −1𝜔𝑛 ∫ (�̈� +
𝑓
𝑚) sin𝜔𝑛
(𝑡 −𝑡
0𝜉)𝑑𝜉 → 𝑧 = −
1𝜔𝑛 ∫ �̈� sin𝜔𝑛
(𝑡 −𝑡
0𝜉)𝑑𝜉 −
1𝜔𝑛 ∫𝑓
𝑚sin𝜔𝑛
(𝑡 −𝑡
0𝜉)𝑑𝜉
→ 𝑧 = −1𝜔𝑛 ∫ −
𝑣0
𝑡1sin𝜔𝑛
(𝑡 −𝑡
0𝜉)𝑑𝜉 −
1𝜔𝑛 ∫ (−
𝑣0
𝑡1𝜉 + 𝑣0) 𝛿(𝑡) sin𝜔𝑛
(𝑡 −𝑡
0𝜉)𝑑𝜉
−1𝜔𝑛 ∫𝑓
𝑚sin𝜔𝑛
(𝑡 −𝑡
0𝜉)𝑑𝜉
𝑧 = −1𝜔𝑛 (−𝑣0
𝑡1)∫ sin𝜔𝑛
(𝑡 −𝑡
0𝜉)𝑑𝜉 −
1𝜔𝑛 (−𝑣0
𝑡1× 0+ 𝑣0) sin𝜔𝑛
(𝑡 − 0 ) −1𝜔𝑛 𝑓
𝑚∫ sin𝜔𝑛
(𝑡 −𝑡
0𝜉)𝑑𝜉

68
𝑧 = −1𝜔𝑛 (−𝑣0
𝑡1)cos𝜔𝑛
(𝑡 − 𝜉)
𝜔𝑛 |0
𝑡
−𝑣0
𝜔𝑛 sin𝜔𝑛
𝑡 −1𝜔𝑛 𝑓
𝑚
cos𝜔𝑛 (𝑡 − 𝜉)
𝜔𝑛 |0
𝑡
𝑧 = −1𝜔𝑛 (−𝑣0
𝑡1) (cos𝜔𝑛
(𝑡 − 𝑡 )
𝜔𝑛 −cos𝜔𝑛
(𝑡)
𝜔𝑛 ) −
𝑣0
𝜔𝑛 sin𝜔𝑛
𝑡 −1𝜔𝑛 𝑓
𝑚(cos𝜔𝑛
(𝑡 − 𝑡)
𝜔𝑛 −cos𝜔𝑛
(𝑡 − 0)𝜔𝑛
)
𝑧 = −1𝜔𝑛 (−𝑣0
𝑡1) (
1𝜔𝑛 −cos𝜔𝑛
(𝑡)
𝜔𝑛 ) −
𝑣0
𝜔𝑛 sin𝜔𝑛
𝑡 −1𝜔𝑛 𝑓
𝑚(
1𝜔𝑛 −cos𝜔𝑛
(𝑡)
𝜔𝑛 )
𝑧 = −1𝜔𝑛 (−
𝑣0
𝜔𝑛 𝑡1) (1− cos𝜔𝑛 𝑡) −
𝑣0
𝜔𝑛 sin𝜔𝑛
𝑡 −1𝜔𝑛
𝑓
𝜔𝑛 𝑚(1− cos𝜔𝑛 𝑡)
𝑧 =𝑣0
𝜔𝑛 ×𝜔𝑛 𝑡1(1−
𝑓𝑡1𝑚𝑣0
) (1− cos𝜔𝑛 𝑡) −𝑣0
𝜔𝑛 sin𝜔𝑛
𝑡
𝜔𝑛 𝑧
𝑣0=
1𝜔𝑛 𝑡1
(1 −𝑓𝑡1𝑚𝑣0
) (1− cos𝜔𝑛 𝑡) − sin𝜔𝑛 𝑡
𝑑𝑧
𝑑𝑡= 0 →
1𝜔𝑛 𝑡1
(1 −𝑓𝑡1𝑚𝑣0
)𝜔𝑛 sin𝜔𝑛
𝑡 − 𝜔𝑛 cos𝜔𝑛
𝑡 = 0 → tan𝜔𝑛 𝑡 =𝜔𝑛 𝑡1
1− 𝑓𝑡1𝑚𝑣0
cos𝜔𝑛 𝑡 =
1√1+ tan2𝜔𝑛 𝑡
=1
√1+ ( 𝜔𝑛 𝑡1
1− 𝑓𝑡1𝑚𝑣0
)
2=
1− 𝑓𝑡1𝑚𝑣0
√(1− 𝑓𝑡1𝑚𝑣0)
2+ (𝜔𝑛 𝑡1)2
sin𝜔𝑛 𝑡 = tan𝜔𝑛
𝑡 × cos𝜔𝑛 𝑡 =
𝜔𝑛 𝑡1
1− 𝑓𝑡1𝑚𝑣0
×1 − 𝑓𝑡1𝑚𝑣0
√(1− 𝑓𝑡1𝑚𝑣0)
2+ (𝜔𝑛 𝑡1)2
=𝜔𝑛 𝑡1
√(1 − 𝑓𝑡1𝑚𝑣0)
2+ (𝜔𝑛 𝑡1)2
sin𝜔𝑛با جاگذاری 𝑡 وcos𝜔𝑛
𝑡 در رابطه𝑧 مقدار بیشینه𝑍𝑚𝑎𝑥 شود:به صورت زیر محاسبه می

69
هاي دو یا چند درجه آزاديسیستم
شود. اگر سیستمی به بیش از یک مختصات برای توصیف حرکتش نیاز داشته باشد بدان سیستم چند درجه آزادی گفته می
به دو مختصه مستقل برای توصیف حرکت خود نیاز دارد. بنابراین یک سیستم دو درجه آزادی
فرکانس طبیعی داشته و 𝑁درجه آزادی 𝑁یک سیستم درجه با سیستم یک درجه آزادی آن است که 𝑁های تفاوت سیستم
هر فرکانس طبیعی نیز متناظر با یک حالت طبیعی ارتعاشی با یک فرم جابجایی مشخص است که بدان مود نرمال گفته
باشند. ها مقادیر ویژه و بردارهای ویژه میشود. عبارات ریاضی متناظر با این کمیتمی
تحلیل مود نرمال
سیستم انتقالی
توصیف 𝑥2و 𝑥1سیستم نامیرای شکل زیر را در نظر بگیرید که یک سیستم دو درجه آزادی است زیرا با دو مختصه مستقل
شود:به صورت زیر بیان می شود. معادله حرکت دیفرانسیلمی
گذارد که حول نقطه تعادل برای مود نرمال نوسان، هر جرم یک حرکت هارمونیک با فرکانس یکسان را پشت سر می
افتد.استاتیکی به صورت همزمان اتفاق می
با قرار دادن روابط باال در معادله دیفرانسیل حرکت خواهیم داشت:
)معادله الف(
یا
ی آن که معادله باال پاسخ غیرصفر داشته باشد باید:برا
𝜔2با در نظر گرفتن = 𝜆 توان به صورت زیر ساده نمود:دترمینان باال را می

70
شوند.سیستم نامیده می (eigenvalues)مقادیر ویژه 𝜆2و 𝜆1های معادله فوق یعنی ریشه
شوند:ت زیر حاصل میهای طبیعی سیستم به صوربنابراین فرکانس
شود:ها حاصل میاز معادله )الف( دو رابطه برای نسبت دامنه
𝜔1با جاگذاری فرکانس طبیعی اول
2 = 0/634 𝑘 𝑚⁄ های متناظر با فرکانس طبیعی اول به در رابطه باال، نسبت اندازه دامنه
شود:صورت زیر محاسبه می
𝜔2طبیعی دوم به صورت مشابه با جاگذاری فرکانس
2 = 2/366 𝑘 𝑚⁄ های متناظر با اندازه دامنه در رابطه باال، نسبت
شود:فرکانس طبیعی دوم به صورت زیر محاسبه می
ها.شود و نه مقدار واقعی هر یک از آنها محاسبه میاز دو رابطه قبل تنها نسبت دامنه
، مود سازی شدههای نرمالشود. نسبت دامنهسازی میها نرمالود، نسبت دامنهها برابر با یک قرار داده شاگر هر یک از دامنه
شود.نمایش داده می 𝜙𝑖(𝑥)نرمال نامیده شده و با
شوند.نامیده می (eigenvector)دو مود نرمال این مثال، بردارهای ویژه
توان به صورت زیر بیان نمود:هر مود نرمال نوسان را نیز می

71
رکت دورانیح
معادله حرکت سیستم دورانی دو درجه آزادی زیر به صورت زیر خواهد بود:
معادله حرکت سیستم فوق به صورت ماتریسی عبارت خواهد بود از:
در معادله باال ماتریس
ماتریس جرم و ماتریس
شود.ماتریس سختی نامیده می
رم قطری است. بنابراین:ماتریس سختی حول قطر متقارن بوده و ماتریس ج
توان نوشت:همچنین چون ماتریس جرم قطری است می

72
های مرتبطپاندول
اند . در حالتی که دو پاندول در وضعیت عمودی به یکدیگر مرتبط شده 𝑘در شکل زیر دو پاندول توسط فنر ضعیف با سختی
گردند:ل ارتعاشی به صورت زیر محاسبه میقرار دارند فنر در حالت آزاد خود قرار دارد. مودهای نرما
باشد:شکل ماتریس معادله حرکت به صورت زیر می
های مود نرمال به صورت زیر:با فرض حل
باشند:هاس طبیعی و شکل مودها به صورت زیر میفرکانس
ماند. در مود دوم، دو پاندل در جهت تغییر میفاز بوده و فنر بدون رابطه باال بیانگر آن است که در مود اول، دو پاندول هم
شود. بنابراین فرکانس طبیعی بیشتر است.با یک نقطه در وسط درگیر میمخالف حرکت کرده و فنر
شرایط اولیه
توان ارتعاش آزاد سیستم را به ازای تمامی شرایط اولیه به صورت های مود نرمال مشخص باشند، میها و شکلاگر فرکانس
مودهای نرمال تعیین نمود. به عنوان مثال، مودهای نرمال سیستم زیر عبارت خواهد بود از: مجموع

73
به شکل 𝑖افتد، معادله حرکت برای مود برای ارتعاش آزادی که در یکی از مودهای نرمال به ازای هر شرایط اولیه ارتفاق می
زیر خواهد بود:
ها برای ارتعاش آزاد متناسب کند که نسبت دامنهتضمین می 𝜙𝑖ید شرایط اولیه را ارضا نمایند و ضرورتاً با 𝜓𝑖و 𝑐𝑖های ثابت
است. 𝑖های مود با نسبت دامنه
در حالت کلی به ازای شرایط اولیه، ارتعاش آزاد شامل هر دو مود به صورت همزمان بوده و معادله حرکت به صورت زیر است:
چهار ثابت مورد نیاز برای دو معادله یفرانسیل مرتبه دوم هستند. 𝜓2و 𝑐1 ،𝜓1 ،𝑐2های ثابت
باشند. برای تعیین چهار بیانگر جابجایی مبدا زمان برای هر مود می 𝜓2و 𝜓1بیانگر مقدار هر مود و فازهای 𝑐2و 𝑐1های ثابت
شوند:گیری از معادالت باال، معادالت سرعت به صورت زیر حاصل میا مشتقثابت فوق، به دو معادله دیگر نیاز است که ب
𝑡با جاگذاری مقادیر اولیه در چهار معادله باال در = شوند.محاسبه می 𝜓2و 𝑐1 ،𝜓1 ،𝑐2چهار ثابت 0
مثالً به ازای شرایط اولیه زیر
خواهیم داشت:
کنیم. برای محاسبه ضرب کرده و معادله حاصل را معادله اول جمع می 2/732ادله دوم را در برای حل چهار معادله فوق، مع
𝑐2 sin 𝜓2 کنیم. به روش مشابه برای ضرب کرده و معادله حاصل را با معادله اول جمع می 0/732−معادله دوم را در
𝜔1𝑐1 cos𝜓1 و𝜔2𝑐2 cos𝜓2 هیم کرد. بنابراین:عمل خوا
74
در نتیجه:
معادله ارتعاش آزاد به ازای شرایط اولیه بیان شده به صورت زیر بیان خواهد شد:
بستگی دارد. 𝜙1معادله باال بیانگر آن است که بخش عمده پاسخ سیستم به مود اول یعنی
مثال:
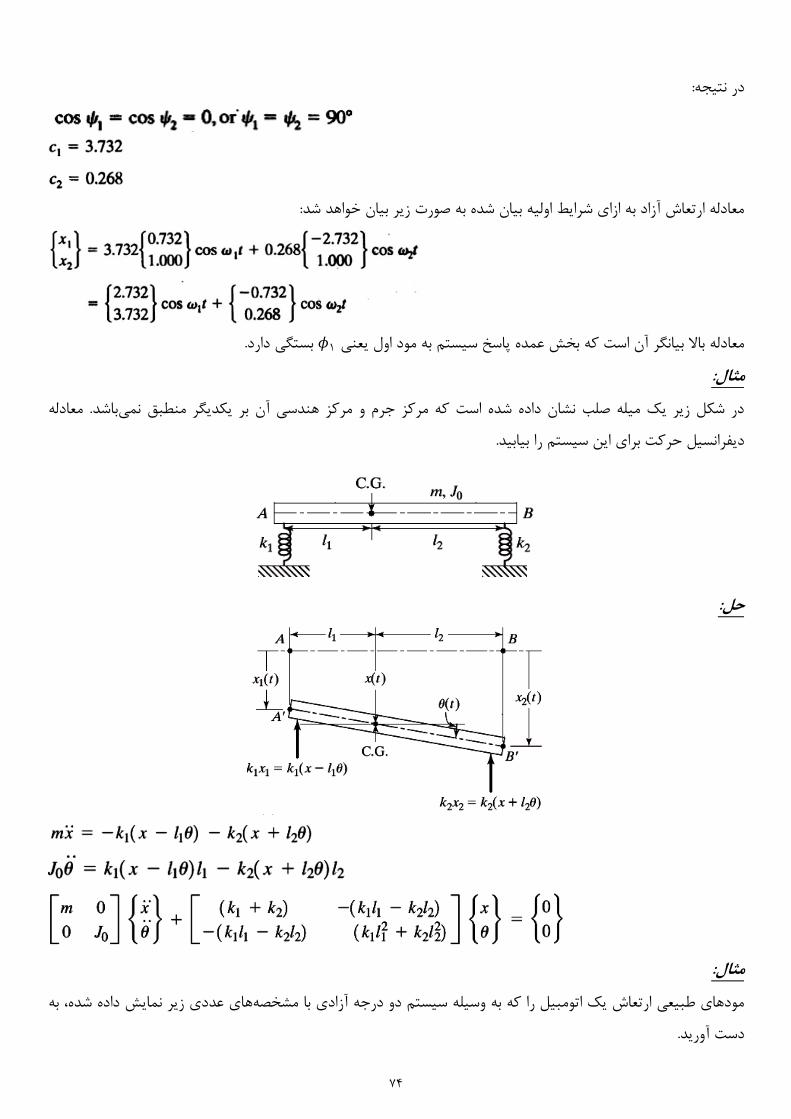
باشد. معادله مرکز هندسی آن بر یکدیگر منطبق نمی در شکل زیر یک میله صلب نشان داده شده است که مرکز جرم و
دیفرانسیل حرکت برای این سیستم را بیابید.
حل:
مثال:
های عددی زیر نمایش داده شده، به مودهای طبیعی ارتعاش یک اتومبیل را که به وسیله سیستم دو درجه آزادی با مشخصه
دست آورید.

75
حل:
مونیک به صورتهای هاربه ازای حل
گردد:ژیراسیون به صورت زیر تعریف میشعاع
𝑟𝑔2 =
𝐽0𝑚
معادله حرکت سیستم به صورت زیر خواهد بود:
توان نوشت:با صفر قرار دادن دترمینان ماتریس ضرایب می
تحلیل ارتعاش اجباری
باشد:معادالت حرکت یک سیستم دو درجه آزادی میرا در حالت کلی تحت نیروی خارجی به صورت زیر می
شوند:رمونیک زیر تعریف مینیروهای خارجی به صورت ها

76
شود:حل حالت پایدار نیز به صورت زیر بیان می
توان نوشت:با جاگذاری در معادله حرکت می
با تعریف
توان به صورت زیر ساده نمود:رابطه قبل را می
بنابراین
بنابراین حل کلی به صورت زیر حاصل خواهد شد:
فنر –ستم جرم پاسخ حالت پایدار سی
گردد:پاسخ حالت پایدار سیستم نشان داده شده در شکل به صورت زیر تعیین می

77
با قرار دادن مقادیر زیر در معادله اصلی
شود:معادله حرکت به صورت زیر ساده می
شود:بنابراین دامنه به صورت زیر بیان می
با تعریف
خواهیم داشت:

78
معادله الگرانژ
شود:به صورت زیر بیان مینامیرا درجه آزادی 𝑛معادالت الگرانژ برای یک سیستم
انرژی پتانسیل سیستم است. 𝑉انرژی جنبشی سیستم و 𝑇در رابطه باال
�̇�𝑖در رابطه باال = 𝜕𝑥𝑖 𝜕𝑡⁄ سرعت و𝐹𝑖 است. 𝑥𝑖نیروی ناپایستار متناظر با مختصات
د.شوجایگزین می 𝜃𝑖با 𝑥𝑖و جابجایی ، 𝑀𝑖با گشتاور 𝐹𝑖های دورانی، نیروی ود که برای سیستمتوجه ش
توان به صورت زیر بیان نمود:معادله الگرانژ را میحالت ارتعاش آزاد در
مثال:
آورید. معادله حرکت برای سیستم دورانی زیر را با استفاده از معادله الگرانژ به دست
حل:
انرژی جنبشی سیستم به صورت زیر است:
در معادله الگرانژ خواهیم داشت:
𝑥1 = 𝜃1, 𝑥2 = 𝜃2, 𝑥3 = 𝜃3 شود:به صورت زیر تعریف می محور دورانیانرژی پتانسیل
شود:بنابراین انرژی پتانسیل سیستم به صورت زیر تعریف می
شوند:با جاگذاری در معادله الگرانژ معادالت زیر حاصل می

79
ال:مث
𝑘1در حالتی که های طبیعی سیستمفرکانسمعادله حرکت سیستم زیر را تعیین نمایید. همچنین = 𝑘2 = 𝑘3 = 𝑘 و
𝑚1 = 𝑚2 = 𝑚3 = 𝑚 باشد محاسبه نمایید.
حل:
معادله الگرانژ:
𝑛 که در آن = باشد.می3
𝑑
𝑑𝑡(𝜕𝑇
𝜕�̇�1) −
𝜕𝑇
𝜕𝑥1+𝜕𝑉
𝜕𝑥1=𝑑
𝑑𝑡(12 × 2𝑚1�̇�1) − 0+
12(2𝑘1𝑥1 − 2𝑘1𝑥2) = 0
→ 𝑚1�̈�1 + 𝑘1𝑥1 − 𝑘1𝑥2 = 0
𝑑
𝑑𝑡(𝜕𝑇
𝜕�̇�2) −
𝜕𝑇
𝜕𝑥2+𝜕𝑉
𝜕𝑥2=𝑑
𝑑𝑡(12 × 2𝑚2�̇�2) +
12(2𝑘1𝑥2 − 2𝑘1𝑥1 + 2𝑘2𝑥2 − 2𝑘2𝑥3) = 0
→ 𝑚2�̈�2 − 𝑘1𝑥1 + (𝑘1 + 𝑘2)𝑥2 − 𝑘2𝑥3 = 0
𝑑
𝑑𝑡(𝜕𝑇
𝜕�̇�3) −
𝜕𝑇
𝜕𝑥3+𝜕𝑉
𝜕𝑥3=𝑑
𝑑𝑡(12 × 2𝑚3�̇�3) − 0+
12 ×
(2𝑘2𝑥3 − 2𝑘2𝑥2) = 0
→ 𝑚3�̈�3 − 𝑘2𝑥2 + 𝑘2𝑥3 = 0
𝑘1در حالتی که = 𝑘2 = 𝑘3 = 𝑘 و𝑚1 = 𝑚2 = 𝑚3 = 𝑚 :باشد
[𝑘] = [𝑘 −𝑘 0−𝑘 2𝑘 −𝑘0 −𝑘 𝑘
] [𝑚] = [𝑚 0 00 𝑚 00 0 𝑚
]

80
𝑥(𝑡) = [
𝑥1𝑒𝑖𝜔𝑡
𝑥2𝑒𝑖𝜔𝑡
𝑥3𝑒𝑖𝜔𝑡
] = 𝑒𝑖𝜔𝑡 [
𝑥1𝑥2𝑥3
] = 𝑒𝑖𝜔𝑡�⃗�
که در آن:
�⃗� = [
𝑥1𝑥2𝑥3
]
توان به صورت زیر خالصه نمود:بنابراین معادله حرکت را به شکل ماتریسی می
λ با تغییر متغیر = 𝜔2:
های با میرایی لزجیارتعاش اجباری سیستم
شود:در حالتی که میرایی لزجی در سیستم وجود داشته باشد معادله الگرانژ به صورت زیر نوشته می
شود:تابع میرایی لزجی است که به صورت زیر تعریف می 𝑅و 𝑚𝑖نیروی اعمال شده به جرم 𝐹𝑖که در آن
𝑅 =12∑𝑐𝑖�̇�𝑖
2

81
مثال:
معادله حرکت سیستم زیر را بیابید.
حل:
𝑑
𝑑𝑡(𝜕𝑇
𝜕�̇�1) −
𝜕𝑇
𝜕𝑥1+𝜕𝑅
𝜕�̇�1+𝜕𝑉
𝜕𝑥1= 0
𝑑
𝑑𝑡(12 × 2𝑚1�̇�1) − 0+
12(2𝑐1�̇�1 + 2𝑐2�̇�1 − 2𝑐2�̇�2 + 2𝑐5�̇�1 − 2𝑐5�̇�3) +
12(2𝑘1𝑥1 + 2𝑘2𝑥1 − 2𝑘2𝑥2) = 0
→ 𝑚1�̈�1 + (𝑐1 + 𝑐2 + 𝑐5)�̇�1 − 𝑐2�̇�2 − 𝑐5�̇�3 + (𝑘1 + 𝑘2)𝑥1 − 𝑘2𝑥2 = 0
𝑑
𝑑𝑡(𝜕𝑇
𝜕�̇�2) −
𝜕𝑇
𝜕𝑥2+𝜕𝑅
𝜕�̇�2+𝜕𝑉
𝜕𝑥2= 0
𝑑
𝑑𝑡(12 × 2𝑚2�̇�2) − 0+
12(2𝑐2�̇�2 − 2𝑐2�̇�1 + 2𝑐3�̇�2 − 2𝑐3�̇�3 + 2𝑐4�̇�2)
+12(2𝑘2𝑥2 − 2𝑘2𝑥1 + 2𝑘3𝑥2 − 2𝑘3𝑥3) = 0
→ 𝑚2�̈�2 − 𝑐2�̇�1 + (𝑐2 + 𝑐3 + 𝑐4)�̇�2 − 𝑐3�̇�3 − 𝑘2𝑥1 + (𝑘2 + 𝑘3)𝑥2 − 𝑘3𝑥3 = 0
𝑑
𝑑𝑡(𝜕𝑇
𝜕�̇�3) −
𝜕𝑇
𝜕𝑥3+𝜕𝑅
𝜕�̇�3+𝜕𝑉
𝜕𝑥3= 0
𝑑
𝑑𝑡(12 × 2𝑚3�̇�3) − 0+
12(2𝑐3�̇�3 − 2𝑐3�̇�2 + 2𝑐5�̇�3 − 2𝑐5�̇�1) +
12(2𝑘3𝑥3 − 2𝑘3𝑥2) = 0

82
→ 𝑚3�̈�3 − 𝑐5�̇�1 − 𝑐3�̇�2 + (𝑐3 + 𝑐5)�̇�3 − 𝑘3𝑥2 + 𝑘3𝑥3 = 0
بنابراین:
مثال:
است. 𝑚پاندول و جرم 𝑀معادالت حرکت را برای سیستم زیر با استفاده از معادالت الگرانژ به دست آورید. جرم واگن
حل:
⇒
ترین نقطه از پاندول را به عنوان مرجع پتانسیل در نظر بگیریم:اگر پایین
𝑅 =12 𝑐1�̇�
2 +12 𝑐2�̇�
2

83
𝑑
𝑑𝑡(𝜕𝑇
𝜕�̇�) −
𝜕𝑇
𝜕𝑥+𝜕𝑅
𝜕�̇�+𝜕𝑉
𝜕𝑥= 𝐹(𝑡)
𝑑
𝑑𝑡(𝜕𝑇
𝜕�̇�) −
𝜕𝑇
𝜕𝜃+𝜕𝑅
𝜕�̇�+𝜕𝑉
𝜕𝜃= 𝑀(𝑡)
در معادله الگرانژ خواهیم داشت:
𝜕𝑇
𝜕�̇�= (𝑀 +𝑚)�̇� + (𝑚𝑙 cos 𝜃)�̇�
𝜕𝑇
𝜕�̇�=𝑚𝑙2
3 �̇� +12(𝑚𝑙 cos 𝜃)�̇�