Embed Size (px)
Citation preview

Fakulteta za elektrotehniko,
računalništvo in informatiko
Smetanova ulica 17
2000 Maribor, Slovenija
Tomo Jauk
UPRAVLJANJE VAKUUMSKE KOMORE S
SAMODEJNIM ZAJEMOM MERILNIH
PODATKOV
Diplomsko delo
Maribor, maj 2014

i
Fakulteta za elektrotehniko,
računalništvo in informatiko
Smetanova ulica 17
2000 Maribor, Slovenija
UPRAVLJANJE VAKUUMSKE KOMORE S
SAMODEJNIM ZAJEMOM MERILNIH
PODATKOV
Diplomsko delo univerzitetnega študijskega programa
Študent: Tomo Jauk
Študijski program: Univerzitetni študijski program
Telekomunikacije
Mentor: doc. dr. Iztok Kramberger
Somentor: asist. dr. Marko Kos

ii

iii
ZAHVALA
Zahvalil bi se rad predvsem mentorju doc. dr.
Iztoku Krambergerju, ki mi je nudil prostor,
opremo in strokovno pomoč pri nastalih
problemih ob delu diplomske naloge v
laboratoriju. V neizmerno pomoč so mi bili tudi
somentor dr. Marko Kos, Dejan Gačnik, ter ostali
iz Laboratorija za digitalne sisteme. Tudi njim
gre prav posebna zahvala.

iv
UPRAVLJANJE VAKUUMSKE KOMORE S
SAMODEJNIM ZAJEMOM MERILNIH
PODATKOV
Ključne besede: vakuum, temperatura, komora, regulacija, preizkušanje, zajem podatkov
UDK: 621.391(043.2)
Povzetek
Diplomska naloga opisuje razvoj aplikacije za upravljanje vakuumske komore s
samodejnim zajemom merilnih podatkov. Aplikacija obsega temperaturno in vakuumsko
regulacijo preko vmesnika na komori ter zajem merilnih podatkov preko zunanje enote.
Opisane so metode krmiljenja vakuumske komore in metode zajema podatkov. Prav tako so
opisane komponente na sami komori, kot tudi funkcionalnost naprave za zajemanje
podatkov.
Celoten sistem je zgrajen za termično preizkušanje elektronskih komponent v vakuumskem
okolju, s katerim lahko določamo pravilnost delovanja v različnih temperaturnih območjih.
Na takšen način je možno preizkušati primernost oziroma skladnost elektronskih
komponent glede na pričakovanja njihovega delovanja pod specifičnimi temperaturnimi in
vakuumskimi pogoji. Delovanje celotnega sistema in merilne aplikacije je predstavljeno na
primeru temperaturno spremenljivega upora oziroma termistorja.

v
VACUUM CHAMBER MANAGEMENT WITH
AUTOMATIC MEASUREMENT DATA
AQUISITION
Key words: vacuum, temperature, chamber, regulation, testing, data acquisition
UDK: 621.391(043.2)
Abstract
This diploma thesis presents the development of application for management of a vacuum
chamber with automatic acquisition of measurement data. Application includes
temperature and vacuum regulation through the interface to the chamber and data
acquisition through the external unit.
Described are methods of vacuum chamber regulation, methods of data acquisition,
vacuum chamber components and functionality of the device for data acquisition.
The entire system is built for thermal testing of electronic components within the vacuum
conditions, which enables us the testing of correct operation at different temperature
ranges. In such a way we are able to confirm the compliance of electronic components
according to expected operation under specific temperature and vacuum conditions.
Operation of the whole system and measurement application is presented with an example
of temperature variable resistor named thermistor.

vi
Kazalo
1 Uvod .............................................................................................................................. 1
2 Termično in tlačno preizkušanje elektronskih naprav ................................................... 2
2.1 Zgradba vakuumske komore ................................................................................... 2
2.1.1 Temperaturni senzor ........................................................................................ 3
2.1.2 IR merilnik temperature................................................................................... 4
2.2 Tipi vakuumski črpalk ............................................................................................ 6
2.3 Tlačno preizkušanje ................................................................................................ 7
2.3.1 Teorija vakuumske tehnologije ....................................................................... 7
2.3.2 Površinski vplivi in razplinjenje ...................................................................... 7
2.4 Termično preizkušanje ............................................................................................ 8
2.4.1 Temperaturne meje elektronskih naprav ............................................................. 8
2.4.2 Spremembe karakteristik elektronskih komponent ............................................. 9
2.4.3 Obnašanje pasivnih komponent pri preizkuševalnih temperaturah..................... 9
2.4.4 Parametri za določanje temperaturnih mej polprevodniških komponent .......... 10
2.4.5 Temperaturne meje osnovnih polprevodniških materialov ............................... 10
2.4.6 Temperaturni vpliv na materiale in dizajn kontaktov na čipu ter povezave med
komponentami ................................................................................................................. 11
2.5 Termistorji ............................................................................................................ 12
2.5.1 NTC ................................................................................................................... 13
2.5.2 PTC.................................................................................................................... 13
2.6 Standardi ............................................................................................................... 14
2.6.1 Standardi ECSS ................................................................................................. 14
2.6.2 Standardi NASA ................................................................................................ 17

vii
3 Aplikacija za upravljanje komore z zajemom podatkov ............................................. 20
3.1 Regulacija ............................................................................................................. 20
3.2 Temperaturna regulacija ....................................................................................... 20
3.3 Vzdrževanje temperature ...................................................................................... 21
3.4 Vakuumska regulacija ........................................................................................... 21
3.5 Programsko varovanje vakuumske komore .......................................................... 22
3.6 Zajem podatkov z napravo NI-DAQ .................................................................... 22
3.6.1 Lastnosti naprave NI-DAQ 6343 in shema ....................................................... 23
3.6.2 Analogni vhodi .................................................................................................. 25
3.6.3 Območje delovanja analognega vhoda .............................................................. 26
3.6.4 Nastavitve analognega vhoda ............................................................................ 26
3.6.5 Časovne nastavitve analognih vhodov .............................................................. 26
3.6.6 Analogni izhodi ................................................................................................. 27
3.6.7 Digitalni vhodi in izhodi ................................................................................... 28
3.7 Nastavitve programirljivih nalog za NI-DAQ ...................................................... 29
3.8 Uporabniške nastavitve parametrov ...................................................................... 29
3.8.1 Nastavitve parametrov za vakuumsko komoro ................................................. 29
3.8.2 Nastavitve parametrov za napravo za zajemanje .............................................. 31
3.9 Avtomatizirano izvajanje nalog ............................................................................ 33
3.10 Beleženje merjenih podatkov ............................................................................ 37
3.11 Struktura paketov za serijsko komunikacijo ..................................................... 37
3.12 Temperaturni senzor površine ........................................................................... 41
3.13 Programsko okolje Visual Studio ...................................................................... 42
3.14 Programski jezik C# .......................................................................................... 42
3.15 Future Technology Devices International – FTDI ............................................ 42

viii
4 Meritve in rezultati ...................................................................................................... 43
4.1 Preizkusna komponenta ........................................................................................ 43
4.2 Vezava preizkusne komponente ........................................................................... 46
4.3 Meritve preizkusne komponente ........................................................................... 48
4.3.1 Merjenje napetosti ............................................................................................. 48
4.3.2 Merjenje električnega toka ................................................................................ 48
4.3.3 Spreminjanje upornosti termistorja ................................................................... 49
4.3.4 Primerjava med izmerjenimi vrednostmi in vrednostmi proizvajalca .............. 51
4.4 Primerjava vrednosti med dvema cikloma ............................................................ 54
4.5 Natančnost temperaturne histereze ....................................................................... 54
4.6 Hlajenje in gretje ................................................................................................... 55
4.7 Hitrost naraščanja in padanja temperature ............................................................ 56
4.8 Ustvarjanje vakuuma ............................................................................................ 57
4.9 Temperaturna slika ............................................................................................... 59
5 Sklep ............................................................................................................................ 61
6 Literatura ..................................................................................................................... 62

ix
Seznam simbolov
R – upornost
T – temperatura
β – materialna konstanta
U – napetost
I – tok
t - čas
p - tlak
r – relativna napaka
Δx - odmik od povprečja
x - povprečna vrednost
T(t) – spreminjanje temperature s časom
ΔT – sprememba temperature
Δt – sprememba časa

x
Seznam kratic
NASA angl. National Aeronautics and Space Administration
ESA angl.European Space Angecy
NI-DAQ zajem podatkov (angl. National Instrumets – Data Acquisition)
IR infrardeče (angl. Infrared)
PWM pulzno-širinska modulacija (angl. Pulse-width modilation)
ADC analogno-digitalni pretvornik (angl. Analog-digital converter)
NI-PGIA instrumentacijski ojačevalnik (angl. Instrumentation amplifier)
AI FIFO analogni vhod »prvi noter, zadnji ven« (angl. Analog input First in-first out)
AI analogni vhod (angl. Analog input)
AO analogni izhod (angl. Analog output)
DI digital input (angl. Digital input)
DO digital output (angl. Digital output)
RSE referenčen z enim koncem (angl. Referenced single-ended)
NRSE nereferenčen z enim koncem (angl. Non-referenced single-ended)
DAC digitalno-analogen pretvornik (angl. Digital-to-analog converter)
PTC pozitiven temperaturni koeficient (angl. Positive tempereture coefficient)
NTC negativen temperaturni keficient (angl. Negative temperature coefficient)
GUI grafičen vmesnik (angl. Graphical user interface)
MUX množilnik (angl. Multiplexer)
DIFF razlika (angl. Difference)
COM komunikacija (angl. Communication)
MIL vojaški (angl. Military)
ECSS Evropska korporacija za vesoljsko standardizacijo (angl. European Cooperation
on Space Standardization)

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 1
1 Uvod
Laboratorij za digitalne sisteme je razvil strojno opremo za vakuumsko komoro s
temperaturno regulacijo. Usmerjanje študentskih projektov v vesoljske tehnologije je
pomenilo potrebo po okolju, v katerem bi se razvijajoča oprema za vesoljske misije lahko
preizkusila. Takšne vrste oprema je na trgu sorazmerno draga, zato se je laboratorij odločil
za projekt razvoja svoje opreme. Potreba po aplikaciji, ki bi združevala celotno
funkcionalnost že razvite strojne opreme v vakuumski komori, je pripeljala do ideje za to
diplomsko nalogo. V besedi celotna funkcionalnost je mišljeno, da aplikacija omogoča
uporabo in merjenje celotnega nabora vgrajenih sistemov v komoro.
Za vesoljsko opremo veljajo precej strogi pogoji, zato obstajajo mnogi standardi različnih
vesoljskih agencij kot sta NASA in ESA. V teh standardih so zapisani preizkusni postopki
in mejne vrednosti za preizkušanje. S preizkušanjem elektronskih elementov se bomo
poskusili čim bolj približati izbranim standardom. Če bodo po končanem preizkušanju
meritve v mejah, kot so zapisane v standardu, bomo lahko trdili, da razvita oprema zadošča
določenemu standardu.
Tovarniško zgrajene vakuumske komore za preizkušanje, kot jih imajo velike vesoljske
agencije, omogočajo preizkušanje številnih faktorjev kot so:
življenjski cikli,
delovanje v temperaturno, vakuumsko in vlažno spremenljivih pogojih,
stopnje uhajanja plinov in tekočin,
spremembe sevalnih lastnosti materialov.
V laboratoriju zgrajeni vakuumski komori ni mogoče zadovoljiti tako strogih standardnih
pogojev vesoljskih agencij, zato smo se osredotočili le na temperaturne in vakuumske
pogoje ter življenjske cikle.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 2
2 Termično in tlačno preizkušanje elektronskih naprav
Elektronske naprave delujejo v določenem temperaturnem območju, zato je potrebno za
pravilno delovanje zagotoviti pravilno dovajanje ali odvajanje toplote. V standardnem
zračnem tlaku in zemeljskih temperaturnih pogojih to ne predstavlja večjih težav. Kadar pa
imamo spremenljive pogoje, kot je vesolje, pa se pojavijo številne težave pri zagotavljanju
pravilnega delovanja elektronskih naprav.
2.1 Zgradba vakuumske komore
Vakuumska komora (Slika 2.1) je prostor, iz katerega izčrpamo zrak in ostale pline s
pomočjo vakuumskih črpalk. Za temperaturno regulacijo skrbita dva grelca moči 150 W in
hladilni sistem. Zgrajena je iz kovine in ima številne vhodno/izhodne priključke za
priključitev različnih instrumentov za merjenje.
SLIKA 2.1 VAKUUMSKA KOMORA
V notranjosti komore se nahaja mizica, po kateri so speljane bakrene cevi za odvajanje in
dovajanje toplote (Slika 2.4). Mizica ima štiri temperaturne senzorje. V vsakem kotu
mizice se nahaja en senzor. Senzorji so proizvajalca Dallas, tipa DS18B20.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 3
2.1.1 Temperaturni senzor
Temperaturni senzor (Slika 2.2) je digitalni termometer, ki omogoča 9 do 12 bitne
temperaturne meritve. Komunicira preko enožilnega vodila s centralnim
mikroprocesorjem. Njegovo temperaturno območje je med -55 °C in +125 °C z
natančnostjo ±0,5 °C v območju med -10 °C in +85 °C. Vsak BS12B20 ima unikatno 64
bitno serijsko kodo, katera omogoča združevanje več enakih senzorjev na isto
komunikacijsko vodilo. V vakuumski komori so na merilni mizici štirje senzorji na istem
vodilu.
SLIKA 2.2 DALLASOV TEMPERATURNI SENZOR [8]
Resolucija temperaturnega registra senzorja je uporabniško nastavljiva. Uporabnik lahko
nastavi 9, 10, 11 ali 12 bitno resolucijo. 9 bitna resolucija pomeni 0,5 °C natančnost
merjenja, 12 bitna pa 0,0625 °C natančnost. Podatki o temperaturnih vrednostih se
shranjujejo v temperaturni register (Slika 2.3), ki je velikosti 2 zloga oz. 16 bitov.
Znakovni biti S nam povejo ali je temperatura pozitivna ali negativna. S = 0 pomeni, da je
temperatura negativna, S = 1 pa pomeni, da je temperatura pozitivna.
SLIKA 2.3 TEMPERATURNI REGISTER [8]

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 4
2.1.2 IR merilnik temperature
Na vrhu komore se nahaja mehanizem za premikanje brezkontaktnega IR merilnika
temperature (Slika 2.4), ki se lahko s pomočjo koračnega motorčka giba nad celotno
površino mizice.
SLIKA 2.4 NOTRANJOST VAKUUMSKE KOMORE IN IR MERILNIK TEMPERATURE

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 5
Za prikaz slike skrbi endoskop z monitorjem pritrjenim zunaj komore (Slika 2.5).
Ločljivost kamere je 640x480 točk, monitorja pa 480x320 točk.
SLIKA 2.5 MONITOR ENDOSKOPSKE KAMERE
Endoskop (Slika 2.6) je 88 cm dolga, prilagodljiva cev, na koncu katere se nahaja kamera.
Kamero lahko nastavimo v poljubno lego za snemanje objekta. Nastavljena mora biti tako,
da ne ovira IR kamere med premikanjem nad površino mizice.
SLIKA 2.6 ENDOSKOPSKA KAMERA

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 6
2.2 Tipi vakuumski črpalk
2.2.1 Rotacijska črpalka oziroma črpalka na pozitivni izmik
Rotacijska črpalka je oljna črpalka na pozitivni izmik. Sestavljena je iz ekscentričnega
rotorja, lopatic, dovodnega ter odvodnega kanala. Kadar se rotor vrti, se lopatice zaradi
centrifugalne in tlačnih sil pomikajo naprej in nazaj. Ta proces ustvari zračni prostor
različnih volumnov med steno ohišja rotorja in lopaticami. Zračni prostor se poveča med
sesalnim delom cikla in ustvari vakuum na dovodnem kanalu, ter se zmanjša med
izpraznitvenim delom cikla in ustvari pritisk na odvodni kanal. Vakuum in pritisk na
odvodnem kanalu ne nihata, ker rotacijska črpalka na dovodnih in odvodnih kanalih nima
ventilov. Pretok zraka je konstanten [10].
2.2.2 Turbomolekularna črpalka
Turbomolekularno črpalko sestavljata rotor in stator. Rotirajoče in stabilne lamele so
razporejene izmenično. Vse lamele imajo poševne kanale, pri čemer so kanali rotorskih
lamel zrcalno obrnjeni glede na kanale statorskih lamel. Skupaj tvorijo kompresijsko
razmerje črpalke. Kompresijski efekt se povečuje s sekvenčnim spreminjanjem stopenj
črpalke. S tem lahko pri zraku dosežemo kompresijsko razmerje večje od 1012. Hitrost
črpanja je sorazmerna dovodni prirobnici in obratno sorazmerna hitrosti vrtenja lamel.
Zelo visok tlak za težke pline izhaja iz odvisnosti kompresijskega razmerja na molekularni
masi. Globok vakuum se pri prehodu iz molekularnega v laminarno območje pretoka zelo
hitro izgubi. Preden se vključi turbomolekularna črpalka, moramo imeti dovolj nizek tlak v
komori. Dovolj nizek tlak pomeni približno 0,1 mBar.
Turbomolekularne črpalke imajo vgrajen elektromagnet, ki je elektronsko reguliran in
skrbi, da rotor ostane v aksialnem položaju. Radialen položaj se regulira s pomočjo trajno
magnetnega ležaja ali elektronsko. Rotor in ohišje rotorja se ne dotikata, zato je stopnja
vibracij zelo nizka [10].

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 7
2.3 Tlačno preizkušanje
2.3.1 Teorija vakuumske tehnologije
Vakuum je prostor brez molekul, atomov ali podatkovnih delcev. Besedo vakuum
uporabimo, kadar je tlak manjši od standardnega zračnega tlaka, ki znaša 1013,25 mBar.
Popoln vakuum je praktično nemogoče doseči. Tudi v vesolju ni popolnega vakuuma, saj
vsebuje nekaj delcev na cm3 [19].
2.3.2 Površinski vplivi in razplinjenje
Plin sprejet od trdnine, ki jo preizkušamo v vakuumski komori, imenujemo sorpcija in
predstavlja vpliv med molekulami plina in stenami vakuumske komore. Poznamo dve vrsti
sorpcije. To sta absorpcija in adsorpcija.
Beseda adsorpcija pomeni proces vezave, s katerim so molekule plina povezane na
površino trdnine. Plast adsorpcijskega plina je debeline ene molekule (monolayer) ali več
molekul (multilayer). Vezava plina s trdnino lahko poteka s površinskimi ali kemijskimi
silami.
Absorpcija se nanaša na pline, ki vstopajo v trdnino, kot tudi na pline, ki izstopajo iz nje.
Trdnino, katera sprejema pline oziroma se plin veže na njo, imenujemo absorbant. Če plin
izstopa iz trdnine, se taka trdnina imenuje absorbat.
O desorpciji govorimo, kadar plin, kateri je bil adsorbiran ali absorbiran, pod vplivom
vakuuma začne zapuščati trdnino. Povzročajo jo pritisk, temperatura in oblika površine
trdnine. Plin, ki nastaja pri procesu desorpcije, se imenuje razplinjenje oziroma angleško
»outgassing« [4]. Specifična vrednost razplinjenja je definirana kot vrednost, kadar plin
zapusti enoto površine trdnine. Merilna enota je mbar s-1cm-2.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 8
2.4 Termično preizkušanje
Tipično elektronske naprave delujejo v temperaturnem območju od 0 °C do 85 °C. Takšne
naprave pokrivajo največji delež elektronskih naprav. Za vojaške namene je temperaturno
območje med -65 °C in +125 °C. Delež takšnih naprav je manj kot 1 %. Elektronske
naprave za avtomobilsko industrijo predstavljajo manj kot 5 odstotni delež naprav in imajo
temperaturno območje med -55 °C in 150 °C. Obstajajo pa tudi potrebe po takšnih
elektronskih napravah, ki delujejo v precej večjih temperaturnih razponih. To so predvsem
raziskovanja v vesolju, raziskovanja in produkcija olja in plina, distribucija kontrolnih
sistemov za zračna plovila itd [18].
2.4.1 Temperaturne meje elektronskih naprav
Najnižje temperature, pri katerih polprevodniške naprave in vezja lahko delujejo, so nekaj
stopinj nad absolutno ničlo, ki znaša -273 °C. To pomeni, da delujejo nekje do temperature
-270 °C. Silicij (Si), germanij (Ge) in galijev-arzenit (GaAs) so najpogostejši
polprevodniški materiali v vezjih, ki delujejo pri tako nizkih temperaturah. Elektronske
naprave, ki bazirajo na polprevodniških materialih iz silicija (Si) in galijevega arzenita
(GaAs), imajo najvišjo delovno temperaturo med 400 °C in 500 °C. V določenih okoljih
mora elektronska naprava pokrivati obe ekstremni temperaturi. Tako najvišjo kot najnižjo.
Zato nekatere pasivne komponente delujejo od najnižje temperature, pa vse do nekaj 100
°C. Takšen primer je tranzistor. Moramo pa vzeti v obzir, da vsaka polprevodniška naprava
ali pasivni element, ne omogoča delovanja v takšnih ekstremih. Delovanje je odvisno od
števila materialov, ki so bili uporabljeni, dizajna naprave, pa tudi od tega, kako dolgo je
določena elektronska naprava izpostavljena ekstremni temperaturi. Z velikim
temperaturnim območjem delovanja se lahko spremeni tudi karakteristika delovanja [18].

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 9
2.4.2 Spremembe karakteristik elektronskih komponent
Pri ekstremnih temperaturah se v komponentah odvijajo številni elektronski, ionski in
atomski procesi. Nekateri od njih pri konvencionalnih temperaturah določajo karakteristiko
komponente, drugi pa se sprožijo šele pri višjih ali nižjih temperaturah in nenadno ali
postopno vplivajo na spremembo karakteristike komponente. Pogosto se karakteristika
spremeni pri prehodu iz konvencionalnega območja v ekstremno in spremenjeni trend
karakteristike ostane vse do kritične temperature. Primer kritične temperature je silicij,
kateremu se karakteristika drastično spremeni pri -230 °C.
Največ sprememb se pojavlja pri elektronskih komponentah, ki delujejo na premikih ionov
in na bazi kemijskih procesov. Primeri takih elektronskih komponent so elektrolitski
kondenzatorji, nekateri tipi keramičnih kondenzatorjev in baterije. Kadar je temperatura
dovolj nizka, procesi v njih popolnoma ali deloma zamrejo. Elektrolitski kondenzatorji
izgubijo kapacitivnost pri hlajenju in imajo pri temperaturi -150 °C le še približno 10 %
kapacitivnosti od vrednosti, ki so jo imeli pri sobni temperaturi. Baterije pri temperaturah
nižjih od -100 °C ne delujejo, so pa sposobne delovanja pri višjih temperaturah. Do
približno 200 °C [2].
2.4.3 Obnašanje pasivnih komponent pri preizkuševalnih temperaturah
Upori:
Tankoplastni in metalnoplastni upori se pri nizkih temperaturah obnašajo dokaj stabilno.
Pri visokih temperaturah se začne obnašanje karakteristike spreminjati. Uporabljajo se do
temperature 200 °C, saj se pri višjih temperaturah začne pojavljati hitro staranje upora.
Za debeloplastne upore velja, da se njihova karakteristika spreminja pri nizkih
temperaturah. Pri nekaterih le za nekaj odstotkov, pri drugih pa je sprememba lahko
precejšnja. Za visoke temperature, vse do 500 °C, imajo debeloplastni upori visoko
stabilnost [2].

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 10
Kondenzatorji:
Kondenzatorji s polimernim dielektrikom delujejo stabilno pri nizkih temperaturah, najvišja
temperatura pa je omejena na 200 °C, čeprav bi teoretično nekateri polimeri lahko zdržali
tudi višje temperature. Kapacitivnost se v celotnem temperaturnem območju ne spreminja
veliko.
Keramični kondenzatorji so primerni tako za nizke kot visoke temperature (do 300 °C).
Poznamo dve različici. Prva različica je keramični kondenzator z nizko do srednjo
dielektrično konstanto. Pri teh kondenzatorjih je sprememba kapacitivnosti pri nizkih in
visokih temperaturah zelo majhna. Druga različica je keramični kondenzator z visoko
dielektrično konstanto, ki je sestavljen iz kompleksnejših dielektričnih materialov. Pri
takšnih kondenzatorjih je izguba kapacitivnosti pri visokih in nizkih temperaturah
precejšnja [2].
2.4.4 Parametri za določanje temperaturnih mej polprevodniških
komponent
Lastnosti osnovnih polprevodniških materialov (Si, GaAs, SiC …),
tip komponente (dioda, tranzistor …),
dizajn komponente (material, geometrija, dimenzije),
material in dizajn kontaktov in povezav,
sestav in tehnike sestavljanja ohišij komponent,
tip vezja v katerem je komponenta (digitalna ali analogna) in dizajn vezja,
temperaturno območje v katerem bo komponenta delovala,
kako dolgo bo komponenta izpostavljena preizkuševalnim temperaturam.
2.4.5 Temperaturne meje osnovnih polprevodniških materialov
Polprevodniške naprave delujejo na principu premikov nosilcev naboja (elektronov in
vrzeli). Delovanje je odvisno od kontroliranja premikov nosilcev naboja med p-tipom in n-
tipom polprevodnika. Takšen primer je pn spoj, ki je različno dopiran na obeh straneh
spoja. Nosilci naboja v eno stran lahko prehajajo, v drugo pa ne.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 11
Kadar je temperatura dovolj visoka, razlika električnega potenciala med n in p tipom
polprevodnika izgine in premiki nosilcev naboja v polprevodniku niso več kontrolirani. Z
višanjem temperature se povečuje termalna energija, ki ionizira pomemben del
polprevodniških atomov. Termalna energija prispeva dodatne elektrone in vrzeli v
polprevodniku. Rezultat je približno enako število presežnih nosilcev naboja na obeh
straneh spoja. Ker je število polprevodniških atomov večje kot število dopiranih atomov,
so dopirani atomi pri visokih temperaturah preobremenjeni in širina energijske reže se
spremeni. Zaradi tega se začne pn-spoj obnašati kot upor, ki ne kontrolira prehodov
nosilcev naboja.
Najvišjo temperaturo, pri kateri polprevodnik še deluje, določa energijska reža
polprevodniškega materiala. V praksi to pomeni, da je najvišja temperatura produkt
energijske reže v eV in števila 500. 500 je približen faktor, pri katerem polprevodnik še
deluje. Obstajajo še nekateri drugi faktorji temperaturnih mej, kot je na primer razpad
materiala polprevodnika, ki se lahko zgodi tudi pri nižji temperaturi.
Polprevodniki imajo seveda tudi določeno najnižjo temperaturo delovanja in je odvisna od
polprevodniškega materiala. Metoda, da polprevodnik deluje tudi v nižjih temperaturah, je
metoda z dopiranjem določene koncentracije atomov druge snovi. Če je polprevodnik
dopiran z določeno koncentracijo, lahko doseže degeneriranost. To je stanje, v katerem
dopanti ne potrebujejo energije za ionizacijo in lahko teoretično delujejo do absolutne ničle
[18].
2.4.6 Temperaturni vpliv na materiale in dizajn kontaktov na čipu ter
povezave med komponentami
Metalizacija na čipu se deli v dve področji:
kontakti do polprevodniških materialov ali metalizacija na vratih izolatorjev,
povezave med komponentami in povezave med skozniki (angl. vias).
Kontakti (Slika 2.7) do polprevodniških materialov predstavljajo največji problem pri
zgornjih temperaturnih mejah, predvsem zaradi interakcij med različnimi materiali pri
prenosu signala. Prav tako je metalizacija ozko grlo za temperature zgornjih mej.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 12
S spreminjanjem temperatur od visokih proti nizkim ali obratno, se lahko na povezavah
med komponentami pojavijo spremembe v upornosti. Pri zelo nizkih temperaturah je
znižanje upornosti v povezavah med komponentami lahko kritično. Predvsem, če je za
povezave uporabljeno zlato ali aluminij.
Materiali z nižanjem temperature postajajo vedno bolj stabilni, ker se število interakcij
med materiali zmanjša in je s tem potrebne manj energije, za premike atomov oziroma
molekul. Tako povezave med komponentami in kontakti ne predstavljajo večjega problema
pri nizkih temperaturah. Po drugi strani pa lahko kontakti do polprevodnikov pri nizkih
temperaturah predstavljajo težavo za električni tok pri določenih pogojih.
Za visoke temperature velja ravno obratno. Materiali z višanjem temperature postajajo
vedno manj stabilni. Pojavljati se začnejo oksidacija, korozija in podobni procesi, ki
postajajo s cikličnim ponavljanjem gretja in ohlajanja intenzivnejši.
SLIKA 2.7 PRIMER KONTAKTOV [18]
Za kontakte polprevodnikov in povezovanje komponent morajo biti uporabljeni različni
materiali. Med različnimi materiali morajo biti zaradi nekompatibilnosti med dvema
plastema še vmesne plasti. Na primer, za polprevodnik GaAs je lahko dodana plast
Ni/Ge/Au/Ni/W5Si3/Au kot omski kontakt in lahko zdrži 600 delovnih ur pri temperaturni
obremenitvi 400 °C [3].
2.5 Termistorji
Termistorji so upori, katerih upornost se temperaturno spreminja. Termistorji se
najpogosteje uporabljajo za temperaturne senzorje, grelnih elementih s samodejnim
reguliranjem itd.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 13
2.5.1 NTC
NTC termistorji so temperaturno spremenljivi upori (enačba 2.1) z visokim negativnim
temperaturnim koeficientom upornosti [1]. Materiali, ki se uporabljajo za izdelavo, so
kovinski oksidi z dodanimi primernimi primesmi atomov. Izdelujejo se tako, da se zmes
kovinskih oksidov z dodanimi primesmi atomov in vezivom, dobro premeša in s pomočjo
kalupa oblikuje v želeno obliko ter žge pod visoko temperaturo. Sledi še pospešeno
staranje, saj imajo termistorji v začetni obliki velike variacijske lastnosti [14].
Podobno kot v polprevodnikih, tudi v NTC termistorjih koncentracija prostih nosilcev
ekspotencialno narašča s temperaturo. Konstanta β je določena z vezalno energijo prostih
nosilcev. Imenujemo materialna konstanta. Tipično je konstanta β med 2000 K in 5000 K.
Materialno konstanto proizvajalci podajajo na podlagi izmerjenih upornosti pri dveh
temperaturah. Pri nazivni upornosti termistorja, ki je pri 25 °C in še eni temperaturi
različna od nazivne.
1
1 1( )
1( ) ( )T T
R T R T e
Za termistorje lahko izračunamo tudi temperaturni koeficient upornosti (enačba 2.2), ki je
pri NTC termistorjih izrazito negativen. Podan je v enoti %
K .
2.5.2 PTC
PTC termistorji so upori z visokim pozitivnim temperaturnim koeficientom. Razlikujejo se
od NTC termistorjev, saj imajo pozitiven temperaturni koeficient v ozkem temperaturnem
območju, izven tega območja pa imajo negativen temperaturni koeficient in se obnašajo
kot NTC termistorji. Materiali za izdelavo so kovinski oksidi s feroelektričnimi lastnostmi
[17].
2
1 lnR
dR d RTK
R dT dT T
(2.2)
(2.1)

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 14
2.6 Standardi
V svetu obstaja nekaj agencij, ki se ukvarjajo s preizkušanjem opreme za spremenljive
okoljske pogoje. Vsaka agencija ima svojo standardizacijo, zato bomo podali tiste, ki
zadoščajo vakuumski komori v laboratoriju in bi lahko bili uporabni za projekte, ki se bodo
v sklopu laboratorija razvijali za vesoljske projekte. Predstavil bom standardizacijo ECSS
(Evropska korporacija za vesoljsko standardizacijo) agencije ESA, ki je Evropska
vesoljska agencija in NASA, ki je Nacionalna zrakoplovna in vesoljska uprava, katere
standardi se imenujejo MIL (Military Standard).
Preizkusi, ki se preizkušajo za delovanje preizkusnih komponent v vesolju so:
šok, ki ga komponenta doživi ob poletu v vesolje,
akustični preizkus,
vibracijski preizkus,
termično ciklanje
vakuumsko-termično ciklanje,
preizkus pritiska,
življenjska doba.
Preizkusi, ki jih lahko preizkušamo v vakuumski komori so:
termično ciklanje,
vakuumsko-termično ciklanje,
življenjska doba.
2.6.1 Standardi ECSS
Na področje vesoljskega inženirstva in preizkušanja komponent se pri Evropski vesoljski
agenciji nanaša dokument ECSS-E-10 iz februarja 2002. V njem so zabeleženi stresni
preizkusi, ki upoštevajo družino standardov ISO 9000.
Standard ECSS-E-10-02 se nanaša na verifikacijo preizkusne naprave. Predstavlja zahteve
za verifikacijo preizkusne naprave za vesolje.
Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 15
Standard ECSS-E-10-03 se nanaša na preizkušanje naprav za vesolje. Predstavlja standard
za okoljske in zmogljivostne preizkusne zahteve za vesoljske sisteme in verifikacijo iz
standarda ECSS-E-10-02 potrdi ali ovrže z dejanskimi meritvami.
Ker vseh stresnih preizkusov znotraj standarda ne moramo preizkusiti, saj nam trenutna
oprema tega ne omogoča, bomo iz standarda izvzeli tiste parametre, katerih ne moremo
preizkušati.
Preizkusni pogoji in tolerance
Vsak okoljski preizkus mora biti izveden na preizkusnih parametrih, pri katerih bo oprema
delovala in na parametrih, ki so lahko analitično določeni ali pa so kombinacija analize in
dejanskih okoljskih parametrov. Okoljski preizkusi za strojno opremo bi se naj preizkušali
na različne načine in ne le na tisti način, katerega smo predvideli. Stopnja preizkusnih
pogojev in dolžina preizkusa bi tako naj bila maksimalno predvidena z dodano preizkusno
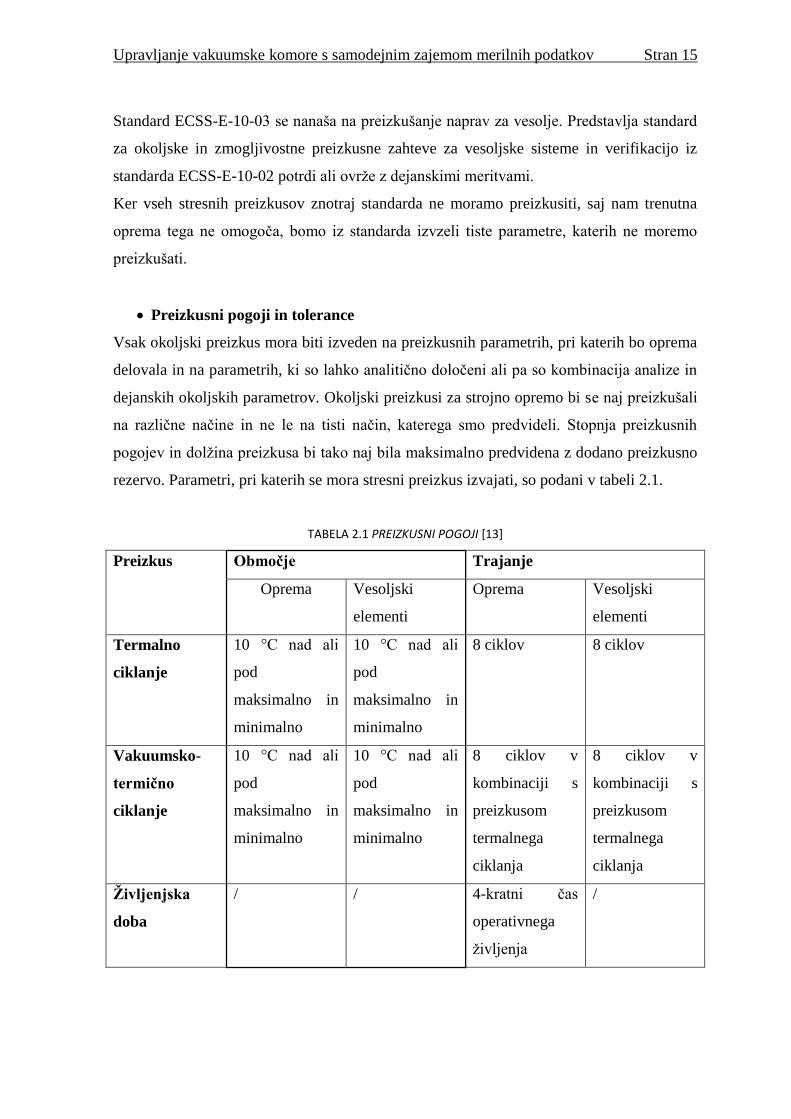
rezervo. Parametri, pri katerih se mora stresni preizkus izvajati, so podani v tabeli 2.1.
TABELA 2.1 PREIZKUSNI POGOJI [13]
Preizkus Območje Trajanje
Oprema Vesoljski
elementi
Oprema Vesoljski
elementi
Termalno
ciklanje
10 °C nad ali
pod
maksimalno in
minimalno
10 °C nad ali
pod
maksimalno in
minimalno
8 ciklov 8 ciklov
Vakuumsko-
termično
ciklanje
10 °C nad ali
pod
maksimalno in
minimalno
10 °C nad ali
pod
maksimalno in
minimalno
8 ciklov v
kombinaciji s
preizkusom
termalnega
ciklanja
8 ciklov v
kombinaciji s
preizkusom
termalnega
ciklanja
Življenjska
doba
/ / 4-kratni čas
operativnega
življenja
/

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 16
Sprejemljivi preizkusni pogoji in trajanje
Sprejemljivi preizkusni pogoji (Tabela 2.2) morajo zadovoljevati maksimalno stopnjo, ki
smo jo predvideli. V tabeli so predstavljene stopnje, ki še zadovoljujejo standard.
TABELA 2.2 SPREMENLJIVI PREIZKUSNI POGOJI IN TRAJANJE [13]
Preizkus Območje Trajanje
Oprema Vesoljski
elementi
Oprema Vesoljski
elementi
Termalno
ciklanje
5 °C nad ali pod
maksimalno in
minimalno
Temperatura
poleta
8 ciklov 8 ciklov
Vakuumsko-
termično
ciklanje
5 °C nad ali pod
maksimalno in
minimalno
Temperatura
poleta
4 cikli v
kombinaciji s
preizkusom
termalnega
ciklanja
4 cikli v
kombinaciji s
preizkusom
termalnega
ciklanja
Natančnost merilnih naprav
Natančnost merilnih naprav (Tabela 2.3), ki so uporabljene za kontrolo in spremljanje
preizkusnih parametrov, mora biti periodično verificirana in mora zadovoljevati preizkusne
okvirje. Tolerance, ki jih standard še dovoljuje so predstavljene v tabeli.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 17
TABELA 2.3 NATANČNOST MERILNIH NAPRAV [13]
Preizkusni parametri Toleranca
Temperatura
od -50 °C do 100 °C Tmax +3 °C in -0 °C
Tmin +0 °C in -3 °C
pod -50 °C in nad 100 °C Tmax +4 °C in -0 °C
Tmin +0 °C in -4 °C
Pritisk
>1,3 mBar 15 %
31,3 10 v 1,3 mBar 30 %
<31,3 10 mBar 80 %
Čas preizkusa 0/+10 %
Temperaturni senzorji vgrajeni v merilno mizico imajo operativno temperaturno območje
med -55 °C in 125 °C. Njihova natančnost je 0,5 °C. Tlaka vakuumskih črpalk ne moremo
nastavljati, tako da je vedno merjen pri najnižji vrednosti, ki jo vakuumske črpalke lahko
dosežejo.
2.6.2 Standardi NASA
Pri vesoljski agenciji NASA se na področje preizkusnih metod za vezja nanaša predvsem
standard MIL-STD-883. Tudi pri tem standardu ne moremo zadovoljiti vseh preizkusnih
postavk, zato bomo izvzeli le tiste, katere lahko zadovoljimo.
Standard se deli v štiri sklope:
1. 1001 do 1999, ki predstavljajo okoljske preizkuse,
2. 2001 do 2999, ki predstavljajo mehanske preizkuse,
3. 3001 do 4999, ki predstavljajo električne preizkuse,
4. 5001 do 5999, ki predstavljajo preizkusne procedure.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 18
Preizkusna metoda 1001
Preizkusna oprema mora biti v vakuumski komori pod tlakom, kot je podan v tabeli 2.4.
Pred preizkusom mora biti oprema vsaj 20 minut na temperaturi 25 °C ± 10 °C. Preizkusna
naprava mora biti napajana s specificirano napetostjo in mora biti nadzorovana od
atmosferskega do minimalnega tlaka.
TABELA 2.4 PREIZKUSNI POGOJI [11]
Preizkusni
pogoj
Maksimalni pritisk Nadmorska višina
Palci živega
srebra
mm živega
srebra
mBar Čevlji Metri
A 17,3 439 465,3 15.000 4572
B 8,88 226 301,3 30.000 9144
C 3,44 87 116 50.000 15240
D 1,31 33 44 70.000 21336
E 0,315 8 10,67 100.000 30450
F 0,043 1,09 1,45 150.000 45720
G 89,436 10x
62,4 10x
63, 2 10x 656.000 200000
Preizkusna metoda 1005
Predstavlja preizkus kakovosti in zanesljivosti preizkušene naprave čez daljše časovno
obdobje. Življenjski preizkus, kot mu pravijo, se izvaja pri delovanju naprave določeno
število ur (Tabela 2.5), kot je predstavljeno v tabeli. Število ur se izvaja glede na namen
uporabe.
Razredi:
razred B predstavlja visoko učinkovito vojaško opremo in
razred S predstavlja vesoljske aplikacije.
Poskusni pogoji A-E predstavljajo naprave, ki imajo
povratno vezavo,
vzporedno vezavo,
oscilatorje.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 19
TABELA 2.5 ČASOVNA OBDOBJA PREIZKUSOV [11]
Minimalna
temperatura
Minimalen čas v urah Preizkusni
pogoj Razred S Razred B
100 / 7500 Hibridna vezja
105 / 4500 Hibridna vezja
110 / 3000 Hibridna vezja
115 / 2000 Hibridna vezja
120 / 1500 Hibridna vezja
125 1000 1000 A-E
130 900 704 A-E
135 800 496 A-E
140 700 352 A-E
145 600 256 A-E
150 500 184 A-E
Preizkusna metoda 1010
Preizkusna metoda 1010 se nanaša na temperaturno ciklanje. V preizkusu moramo narediti
vsaj 10 ciklov od najvišje do najnižje temperature in ob vsaki minimalni in maksimalni
temperaturi moramo vzdrževati temperaturo vsaj 10 minut (Tabela 2.6).
TABELA 2.6 TEMPERATURE ZA PREIZKUSNE POGOJE [11]
Temperaturni pogoj [temperatura °C/toleranca °C]
Korak Čas
[min]
A B C D E F
Minimalna
temperatura
10 -55 / +0
-10
-55 / +0
-10
-65 / +0
-10
-65 / +0
-10
-65 / +0
-10
-65 / +0
-10
Maksimalna
temperatura
10 85 / +10
-0
125 / +15
-0
150 / +15
-0
200 / +15
-0
300 / +15
-0
175 / +15
-0

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 20
3 Aplikacija za upravljanje komore z zajemom podatkov
Aplikacija za upravljanje komore z zajemom podatkov omogoča preizkušanje elektronskih
komponent v vakuumu pod različnimi uporabniškimi pogoji. Napisana je v programskem
okolju Microsoft Visual Studio C#. Uporabljen jezik v aplikaciji je angleščina.
3.1 Regulacija
Regulacija znotraj knjižnice VCMClass zajema temperaturno in vakuumsko krmiljenje.
Krmiljenje je avtomatizirano v programski niti znotraj delavca v ozadju (angl.
backgroundworker). Delavec v ozadju skrbi, da komora vedno sledi tistemu
temperaturnemu in vakuumskem pogoju, ki ga je dodelila aplikacija na višjem nivoju iz
uporabniško določene naloge. Regulacija se znotraj programske niti izvaja tako, da se ena
iteracija programske niti delavca v ozadju izvede ob prejemu paketa PACKET.Report.
PACKET.Report vsebuje podatke o vrednosti parametrov komore. V vsaki iteraciji
programske niti razred VCMClass obvesti višji nivo aplikacije o trenutni vrednosti
temperature in vrednosti vakuuma.
3.2 Temperaturna regulacija
Pogoj, da se temperaturna regulacija sploh lahko izvaja, je uspešno vzpostavljena povezava
z vakuumsko komoro ter delovanje temperaturnih senzorjev na mizici. Za pravilno
delovanje temperaturne regulacije morajo delovati vsi temperaturni senzorji, saj
temperaturo komore izračunamo na podlagi povprečne vrednosti vseh štirih senzorjev. Če
kateri izmed temperaturnih senzorjev ne deluje, je izračun temperature komore manj
natančen.
Temperaturna regulacija ima šest stanj:
TempRegState.CoolOn, predstavlja vklop hladilnega sistema,
TempRegState.HeatOn, predstavlja vklop obeh grelnikov,
TempRegState.Holding,predstavlja stanje čakanja v določenem pogoju, kjer
komora vzdržuje pogoje,

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 21
TempRegState.Error, predstavlja stanje napake v komori,
TempRegState.DoNothing, predstavlja stanje, kjer komora ne dela ničesar, le
vzdržuje povezavo s komoro,
TempRegState.Stop, predstavlja ustavitev vseh procesov v komori.
Vsako stanje se določi na podlagi temperaturne vrednosti iz višjega nivoja aplikacije.
3.3 Vzdrževanje temperature
Vakuumska komora se različno hladi in segreva. Ta razlika ne predstavlja večje težave,
dokler temperature ni potrebno vzdrževati na določeni vrednosti znotraj določenega
območja. Pri ohlajevanju ne moremo spreminjati hitrosti hlajenja. Ob kateri temperaturi
ustaviti hlajenje, kadar želimo doseči določeno temperaturo, smo tako določili
eksperimentalno. Segrevanje se izvaja preko dveh grelcev, ki jima lahko s pomočjo PWM
modulacije nastavljamo grelno vrednost med 0 in 255. Do histerezne vrednosti grelca
grejeta s polno močjo, ko pa je le-ta dosežena, se začne znotraj histereze, do želene
temperaturne vrednosti izračunavati zmanjševanje PWM vrednosti gretja. S tem
postopkom lahko, kar se da natančno vzdržujemo temperaturo na določeni vrednosti
poljubno, uporabniško določen čas.
3.4 Vakuumska regulacija
Za pridobivanje stanja vakuuma uporabljamo tri vakuumske črpalke:
rotacijsko vakuumsko črpalko,
difuzijsko vakuumsko črpalko,
turbomolekularno vakuumsko črpalko.
Vsaka izmed naštetih črpalk se vključi ob določeni vrednosti vakuuma. Rotacijska črpalka
se vključi prva ob atmosferskem tlaku. Naslednja se vključi turbomolekularna črpalka in
kot zadnja še difuzijska.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 22
Vakuumska regulacija ima pet stanj:
VacuumState.On, predstavlja izčrpavanje zraka z vakuumskimi črpalkami,
VacuumState.Off, predstavlja izklop vakuumskih črpalk,
VacuumState.OnAndNotfy, predstavlja izčrpavanje zraka iz vakuumskih črpalk in
obvesti višji nivo aplikacije o vrednosti le, ko je vakuum dosežen,
VacuumState.Error, predstavlja stanje napake na vakuumskih črpalkah,
VacuumState.DoNothing, predstavlja stanje, kjer komora ne dela ničesar, le
vzdržuje povezavo s komoro.
3.5 Programsko varovanje vakuumske komore
V aplikacijo je vgrajeno programsko varovanje, ki ščiti glavne komponente komore pred
okvarami. Vsaka izmed treh vakuumskih črpalk, ima vgrajen temperaturni senzor.
Rotacijska črpalka se lahko zagreje do 80 °C, turbomolekularna in difuzijska črpalka pa do
40 °C. Hladilni sistem ima maksimalno vrednost pri 80 °C. Če je vrednost kateregakoli
izmed teh senzorjev presežena, se proces izvajanja meritve ustavi. Prav tako, se proces
meritve ustavi, če izpadejo vsi štirje senzorji za merjenje temperature na merilni mizici.
3.6 Zajem podatkov z napravo NI-DAQ
Pri preizkušanju elektronskih naprav v vakuumski komori nas zraven fizičnih vplivov na
napravo pod temperaturnimi in vakuumskimi spremembami zanimajo tudi vplivi na
električne lastnosti. Zato smo izbrali napravo National Instruments NI-DAQ 6363, ki lahko
beleži podatke na vhodih in hkrati tudi pošilja podatke na izhod.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 23
3.6.1 Lastnosti naprave NI-DAQ 6343 in shema
Spodaj je prikazana shema naprave NI-DAQ 6343 (Slika 3.1). Naprava se povezuje preko
vodila USB do računalnika ter preko vhodno/izhodnih povezav do naprave, ki se
preizkuša. Imena signalov za povezavo so prikazana v tabeli (Tabela 3.1). Dejanska slika
priključnih konektorjev naprave za zajemanje pa je prikazana na sliki (Slika 3.2).
SLIKA 3.1 ZGRADBA NI-DAQ 6343 [9]
Lastnosti naprave:
32 analognih vhodov s 500 kS/s vzorčne frekvence in 16 bitno ločljivostjo,
4 analogne izhode z 900 kS/s vzorčne frekvence in 16 bitno ločljivostjo,
48 vhodno/izhodnih linij,
4 števce.
kS/s – k predstavlja predpono za kilo, S/s predstavlja vzorce na sekundo
TABELA 3.1 SPECIFIKACIJE VHODOV IN IZHODOV NAPRAVE NI-DAQ [9]
Ime signala Referenca Smer Opis
AI GND / / Ozemljitev analognega vhoda
AI<0..31> Različni AI
GND
Vhod Analogni vhodi kanalov od 0 do 31
AO<0..3> AO GND Izhod Analogni izhodi kanalov od 0 do 3
AO GND / / Ozemljitev analognega izhoda
D GND / / Ozemljitev digitalnih linij
P0<0..31> D GND Vhod ali
izhod
Digitalni vhodi ali izhodi kanalov, ki
spadajo pod Port0

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 24
SLIKA 3.2 VHODNO/IZHODNE POVEZAVE NAPRAVE NI-DAQ [9]

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 25
3.6.2 Analogni vhodi
SLIKA 3.3 SHEMA ANALOGNIH VHODOV NAPRAVE NI-DAQ [9]
Opis sheme analognih vhodov: (Slika 3.3)
V/I Priključek je vhodno izhodna povezava – povezava, kamor povežemo napravo,
ki jo želimo preizkušati preko analognih vhodov.
MUX – Vsak vhodno/izhodni multiplekser ima ADC. Multiplekserji v trenutku
povezujejo en analogni kanal AI do ADC preko NI-PGIA.
Instrumentacijski ojačevalnik (NI-PGIA) – ojačevalnik, ki lahko analogne vhodne
signale ojača ali oslabi tako, da zajamemo signal, ki ima maksimalno ločljivost.
Analogno-digitalni pretvornik (ADC) – ADC digitalizira vhodne analogne signale
tako, da analogno napetost pretvori v digitalno število.
AI FIFO – predstavlja pomnilnik, ki hrani podatke. Daje in jemlje podatke iz
pomnilnika po sistemu »prvi signal, ki pride v pomnilnik, prvi zapusti pomnilnik«.
Naprava omogoča eno ali več hkratnih analogno/digitalnih pretvorb, fiksnega ali
neskončnega števila vzorcev. Za to je potreben pomnilnik, ki skrbi, da se podatki ne
izgubijo.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 26
3.6.3 Območje delovanja analognega vhoda
Vhodno območje vpliva na ločljivost analognega vhoda (Enačba 3.1) [9]. V uporabljeni
napravi je ADC pretvornik 16 biten, kar pomeni, da ADC pretvornik pretvori analogno
vrednost v eno izmed digitalnih vrednosti med 0 in 65536 (216). Te vrednosti so
razporejene čez celotno območje analognega vhoda. Če je vhodno območje med -10 V in
10 V pomeni, da vsaka digitalna vrednost 16 bitnega ADC predstavlja:
3.6.4 Nastavitve analognega vhoda
Obstajajo tri različne nastavitve analognih vhodov:
Diferenčna nastavitev (DIFF) – za merjenje razlike med dvema AI kanaloma,
Referenčna eno-končna nastavitev (RSE) – za merjenje razlike med AI kanalom in
AI GND,
Ne-referenčna eno-končna nastavitev (NRSE) - za merjenje relativne napetosti AI
kanala in AI SENSE ali AI SENSE2.
3.6.5 Časovne nastavitve analognih vhodov
Vsi kanali analognih vhodov uporabljajo »AI Sample Clock« za vzorčenje aktivnih
analognih kanalov. »AI Sample Clock« predstavlja vzorčno uro analognega vhoda. Ker
ima vsak kanal en ADC, »AI Sample Clock« kontrolira vzorčno periodo vseh kanalov
znotraj naloge. Naprava vzorči signale analognih vhodov v nalogi enkrat za vsak »AI
Sample Clock«. Zajem podatkov je sestavljen iz enega ali več vzorcev. Uporabljamo
lokalno uro naprave ali pa imamo uro iz zunanjega vira. Vzorči se lahko na pozitivno ali
negativno fronto ure. Privzeta ura naprave za »AI Sample Clock« je 100 MHz [9].
16
10 ( 10 )305
2
V VV
(3.1)

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 27
3.6.6 Analogni izhodi
Naprava za zajemanje NI-DAQ ima 4 analogne izhode (Slika 3.4), ki so vodeni preko
skupne ure in so sposobni generirati poljubne signale.
SLIKA 3.4 SHEMA ANALOGNIH IZHODOV NAPRAVE NI-DAQ [9]
DAC – štirje digitalno-analogni pretvorniki pretvorijo digitalne vrednosti v analogne
napetosti,
AO FIFO - predstavlja pomnilnik, ki hrani podatke. Daje in jemlje podatke iz
pomnilnika po sistemu »prvi naložen vzorec v pomnilnik za vse želene analogne
izhodne kanale, prvi zapusti pomnilnik«,
AO Vzorčna ura - prebere vzorec iz pomnilnika AO FIFO in ga pošlje na izhodne
kanale,
AO Referenčna izbira – omogoča spremembo napetostnega območja izhodnih
kanalov, izhodnemu signalu je potrebno določiti frekvenco signala, število vzorcev
glede na pomnilnik, število ciklov signala glede na pomnilnik, amplitudo ter odmik.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 28
3.6.7 Digitalni vhodi in izhodi
SLIKA 3.5 SHEMA DIGITALNIH VHODOV IN IZHODOV [9]
Naprava ima digitalne linije razdeljene med tri vrata:
Port0 ima 32 vhodno/izhodnih linij,
Port1 ima 8 vhodno/izhodnih linij,
Port2 ima 8 vhodno/izhodnih linij.
Vsaka linija se lahko uporablja kot vhodna ali izhodna linija. Ali bo linija definirana kot
vhod oziroma izhod, se določi v uporabniških parametrih. Vrednosti, ki jih lahko beremo,
oziroma pišemo po digitalnih linijah, so 1 ali 0. Signali se shranjujejo na izhodnih in
vhodnih linijah preko pomnilnika. Pomnilnik je tako kot na analognih kanalih tipa FIFO
(Slika 3.5). Na izhodnih linijah lahko zapisujemo do 2047 vzorcev naenkrat, beremo pa
lahko do 255 vzorcev naenkrat.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 29
Zaznavanje vrednosti na digitalnih vhodih je omejena z določenimi napetostmi, ki so
podani v tabeli (Tabela 3.2).
TABELA 3.2 MEJNE VREDNOSTI ZAZNAVE
Stopnja Minimalna
vrednost
Maksimalna
vrednost
Vrednost 1
oz. true
2,2 V 5,25 V
Vrednost 0
oz. false
0 V 0,8 V
3.7 Nastavitve programirljivih nalog za NI-DAQ
Koraki za izvajanje zajema podatkov v orodju C#:
napolnimo strukture iz uporabniških parametrov za vsak kanal,
ustvarimo naloge imenovane »Task« in pripadajoče kanale,
začnemo brati in pisati podatke po ustreznih kanalih,
po izteku celotne procedure ustavimo branje in pisanje ter počistimo naloge za
naslednji cikel.
3.8 Uporabniške nastavitve parametrov
Pred zagonom preizkusnega cikla moramo nastaviti preizkusne parametre. V aplikaciji so
preizkusni parametri razdeljeni v dva segmenta.
3.8.1 Nastavitve parametrov za vakuumsko komoro
Ob zagonu aplikacije, se vedno naložijo iz datoteke privzete nastavitve parametrov. Če
želimo uporabiti že shranjene standarde, jih lahko uvozimo iz datoteke, ali pa si po želji
sestavimo svoj standard, po katerem bo vakuumska komora delovala. Datoteke v katere
shranjujemo ali uvažamo v program so tipa »std«. Nastavitve preizkusne procedure se
nastavijo v upravitelju parametrov standardov (Slika 3.6).

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 30
SLIKA 3.6 GUI UPRAVITELJ PARAMETROV STANDARDOV
V upravitelju parametrov standardov (Slika 3.6) je potrebno nastaviti naslednje parametre:
maksimalna temperatura, ki je lahko največ 150 °C,
minimalna temperatura, ki je lahko najmanj -40 °C,
število ciklov,
maksimalni čas procedure,
čas, ko vakuumska komora v vsakem ciklu vzdržuje temperaturo na maksimumu,
čas, ko vakuumska komora v vsakem ciklu vzdržuje temperaturo na minimumu,
vklop/izklop vakuuma,
vklop/izklop difuzijske črpalke.
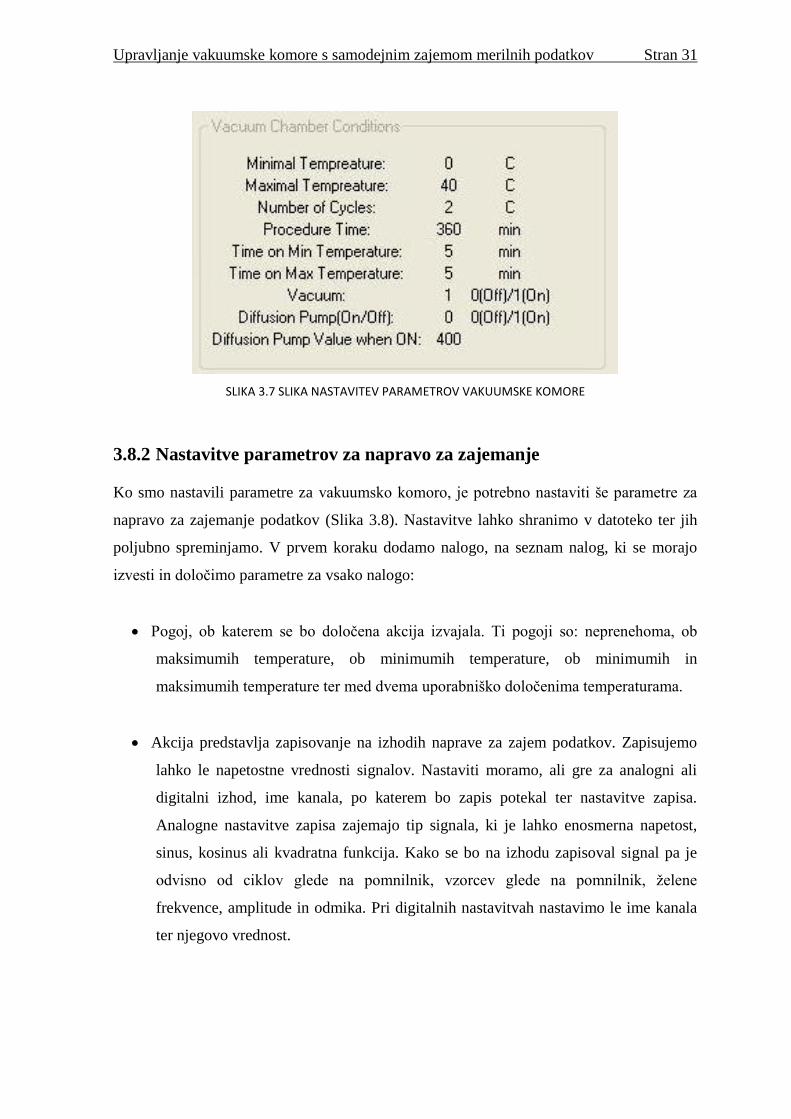
Parametre nastavimo preko upravitelja pred pričetkom preizkusa. Ko jih enkrat nastavimo,
jih med samim preizkusom več ne moremo spreminjati. Nastavljene vrednosti so prikazane
v zavihku »Vacuum chamber standard« (Slika 3.7).
Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 31
SLIKA 3.7 SLIKA NASTAVITEV PARAMETROV VAKUUMSKE KOMORE
3.8.2 Nastavitve parametrov za napravo za zajemanje
Ko smo nastavili parametre za vakuumsko komoro, je potrebno nastaviti še parametre za
napravo za zajemanje podatkov (Slika 3.8). Nastavitve lahko shranimo v datoteko ter jih
poljubno spreminjamo. V prvem koraku dodamo nalogo, na seznam nalog, ki se morajo
izvesti in določimo parametre za vsako nalogo:
Pogoj, ob katerem se bo določena akcija izvajala. Ti pogoji so: neprenehoma, ob
maksimumih temperature, ob minimumih temperature, ob minimumih in
maksimumih temperature ter med dvema uporabniško določenima temperaturama.
Akcija predstavlja zapisovanje na izhodih naprave za zajem podatkov. Zapisujemo
lahko le napetostne vrednosti signalov. Nastaviti moramo, ali gre za analogni ali
digitalni izhod, ime kanala, po katerem bo zapis potekal ter nastavitve zapisa.
Analogne nastavitve zapisa zajemajo tip signala, ki je lahko enosmerna napetost,
sinus, kosinus ali kvadratna funkcija. Kako se bo na izhodu zapisoval signal pa je
odvisno od ciklov glede na pomnilnik, vzorcev glede na pomnilnik, želene
frekvence, amplitude in odmika. Pri digitalnih nastavitvah nastavimo le ime kanala
ter njegovo vrednost.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 32
Odziv predstavlja branje signalov na vhodih naprave za zajemanje podatkov. Beremo
lahko digitalne ali analogne vrednosti. Pri analognih vrednostih je možno meriti tok
ali napetost in za to potrebujemo še naslednje nastavitve kanala: maksimalna
vrednost kanala, minimalna vrednost kanala, vzorčna frekvenca, število prebranih
vzorcev, terminalna konfiguracija, ki je lahko RSE, NRSE ali DIFF in pa način
zajema vzorcev, ki je lahko neprekinjen »ContinuousSamples« ali enkraten zajem
podatkov »FiniteSamples«. Za tokovno merjenje potrebujemo še vrednost »shunt«
upora.
SLIKA 3.8 GUI VMESNIK ZA PRIKAZ NASTAVITEV OPRAVIL V APLIKACIJI

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 33
3.9 Avtomatizirano izvajanje nalog
V začetnem zavihku »Vacuum chamber standard« imamo zraven parametrov za nastavitev
vakuumske komore tudi shemo delovanja (Slika 3.9). Shema delovanja nam prikazuje
delovanje vsake posamezne komponente vgrajene v vakuumsko komoro. Če ima
komponenta rdečo barvo znaka, pomeni, da ne deluje, če je barva zelena, pomeni, da
deluje. Komponente, ki imajo vgrajene temperaturne senzorje, imajo zraven svojega
statusa delovanja tudi temperaturo.
SLIKA 3.9 SPREMLJANJE POGOJEV V VAKUUMSKI KOMORI IN DELOVANJE
Shema delovanja vsebuje tudi temperaturne vrednosti preizkusne posteljice »test bed
temperatures«. Preizkusna posteljica vsebuje 9 vrednosti (Tabela 3.3). Ker ima vakuumska
komora le 4 senzorje, za ostale izračunamo korelacijo med sosednjimi senzorji.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 34
TABELA 3.3 RAZPOREDITEV SENZORJEV IN KORELACIJE
Dejanska vrednost
senzorja zgoraj
levo (ZL)
Korelacijski
izračun vrednosti
ZL in ZD
Dejanska vrednost
senzorja zgoraj
desno (ZD)
Korelacijski
izračun vrednosti
ZL in SL
Korelacijski
izračun vrednosti
ZL, ZD, SL, SD
Korelacijski
izračun vrednosti
ZD in SD
Dejanska vrednost
senzorja spodaj
levo (SL)
Korelacijski
izračun vrednosti
SL in SD
Dejanska vrednost
senzorja spodaj
desno (SD)
Na desni strani aplikacije se nahaja seznam nalog (Slika 3.10). V seznam lahko dodamo
poljubno število nalog. Naloga se izvaja, kadar je izpolnjen temperaturni pogoj vakuumske
komore. Hkrati se izvajajo vse naloge, ki v danem trenutku izpolnjujejo temperaturni pogoj
»1.Condition« (Slika 3.8).

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 35
SLIKA 3.10 SLIKA SEZNAMA NALOG
Procedura se izvaja, dokler ni pretekel celotni čas za izvajanje, ki smo ga določili v
parametrih vakuumske komore, ali pa so se izvedli vsi cikli. Napredek izvajanja ciklov
lahko spremljamo v spodnjem desnem kotu aplikacije, kjer se nahaja vrstica napredka
»Progress Bar«.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 36
Vsi prebrani podatki se zapisujejo v datoteke. Spremljamo jih lahko v zavihku
»Monitoring« v obliki grafa (Slika 3.11) za vsak kanal posebej.
Podatki, ki jih naprava za zajemanje po vodilu pošilja do aplikacije, se beležijo v
pomnilnik, saj lahko naprava za zajemanje na podlagi nastavitev parametrov
»SamplesToRead« (Število vzorcev za branje) in »SampleClock« (Vzorčna ura) vrača
veliko število podatkov. Graf se zaradi beleženja podatkov v pomnilnik ne izrisuje povsem
v realnem času, ampak z manjšim časovnim zamikom.
Skalo izrisovanja grafa si uporabnik lahko poljubno nastavi glede na želeno amplitudo ali
čas, ki ga želi spremljati. Do nastavitev skale grafa dostopamo z desnim miškinim klikom
kjerkoli v področju grafa.
SLIKA 3.11 GRAF ZAJEMA PODATKOV NA IZBRANEM KANALU

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 37
3.10 Beleženje merjenih podatkov
V datoteko se zapisujejo merjene vrednosti za vsak kanal posebej v obliki, ki je podana v
tabeli (Tabela 3.4).
TABELA 3.4 OBLIKE ZAPISOV PODATKOV
Vrednost
meritve
Čas zapisa Temperatura Vrednost
vakuuma
Analogna
merjena
napetost
Vrednost
napetosti v
voltih
Čas zapisa v
obliki hh:mm:ss
Temperatura v
stopinjah
Celzija na 4
decimalke
natančno
Vrednost
vakuuma v
mBar-ih na 3
decimalke
natančno
Analogno
merjen tok
Vrednost toka v
amperih
Digitalna
vrednost
0 ali 1
3.11 Struktura paketov za serijsko komunikacijo
Prvo polje paketa vsebuje informacijo o tipu paketa. Definirano je kot naštevalni tip (angl.
Enumeration – enum). Paketi, ki jih aplikacija prepozna so: REPORT = 1, ACK = 2, CTRL
= 3, WDOG = 4, TIME = 5.
Tipi paketov:
1. Paket REPORT
Je paket z imenom poročilo, ki ga vakuumska komora pošilja računalniku in
vsebuje podatke o stanju komponent v komori. Dolžina paketa je polje 29-ih bitov,
ki vsebujejo naslednje informacije:

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 38
TABELA 3.5 ZGRADBA PAKETA REPORT
Ime parametra Namen Dolžina
parametra
1. paramsDateTime Čas prejetega paketa, hh, mm, ss 3 biti
2. Temp_Vacuum_Pump.Status Status temperaturnega senzorja
vakuumske črpalke, 1-on, 0-off
1 bit
3. Temp_Turbo_Pump.Status Status temperaturnega senzorja
turbomolekularne črpalke, 1-on, 0-off
1 bit
4. Temp_Valve.Status Status temperaturnega senzorja
hladilnega sistema, 1-on, 0-off
1 bit
5. Temp_Diff_Pump.Status Status temperaturnega senzorja
difuzijske črpalke, 1-on, 0-off
1 bit
6. Temp_BL.Status Status senzorja spodaj levo, 1-on, 0-
off
1 bit
7. Temp_TL.Status Status senzorja zgoraj levo, 1-on, 0-off 1 bit
8. Temp_BR.Status Status senzorja spodaj desno 1-on, 0-
off
1 bit
9. Temp_TR.Status Status senzorja zgoraj desno 1-on, 0-
off
1 bit
10. Temp_Vacuum_Pump.Value Vrednost temperaturnega senzorja
vakuumske črpalke
2 bita
11. Temp_Turbo_Pump.Value Vrednost temperaturnega senzorja
turbomolekularne črpalke
2 bita
12. Temp_Valve.Value Vrednost temperaturnega senzorja
hladilnega sistema
2 bita
13. Temp_Diff_Pump.Value Vrednost temperaturnega senzorja
difuzijske črpalke
2 bita
14. Temp_BL.Value Vrednost senzorja spodaj levo 2 bita
15. Temp_TL.Value Vrednost senzorja zgoraj levo 2 bita
16. Temp_BR.Value Vrednost senzorja spodaj desno 2 bita

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 39
17. Temp_TR.Value Vrednost senzorja zgoraj desno 2 bita
18. Vacum_Pressure.Status Status senzorja za pritisk v komori, 1-
on, 0 – off
1 bit
19. Valve_out.Status Status hladilnega sistema, 1-on, 0-off 1 bit
20. Rotary_Pump_out.Status Status rotacijske črpalke 1-on, 0-off 1 bit
21. Turbo_Pump_out.Status Status turbomolekularne črpalke, 1-on,
0-off
1 bit
22. Diff_Pump_out.Status Status difuzijske črpalke, 1-on, 0-off 1 bit
23. Heater_1_out.Value Vrednost grelca številka 1, njegova
vrednost je med 0 in 255
1 bit
24. Heater_2_out.Value Vrednost grelca številka 1, njegova
vrednost je med 0 in 255
1 bit
25. Vacum_Pressure.Value Vrednost vakuuma v komori 4 biti
26. turbo_rpm.Value Vrednost vrtljajev turbomolekularne
črpalke, izraženo v obratih na minuto
1 biti
2. Paket ACK
Je potrditveni paket, ki ga vakuumska komora pošilja računalniku. Pošlje ga le
takrat, kadar smo komori poslali paket iz aplikacije in ga mora komora potrditi, da
je paket uspešno prejela.
3. Paket CTRL
Je kontrolni paket, s katerim posredujemo parametre iz strani aplikacije h komori.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 40
TABELA 3.6 ZGRADBA PAKETA CTRL
Ime parametra Namen Dolžina
parametra
1. ActuatorValuePWM1 Vrednost grelca 1, vrednost je med 0
in 255
1 bit
2. ActuatorValuePWM1 Vrednost grelca 2, vrednost je med 0
in 255
1 bit
3. ActuatorStateCooling Status hladilnega sistema, 1-on, 0-off 1 bit
4. ActuatorStateVacuumPump Status vakuumske črpalke, 1-on, 0-off 1 bit
5. ActuatorStateTurboPump Status turbomolekularne črpalke, 1-
on, 0-off
1 bit
6. ActuatorStateDiffPump Status difuzijske črpalke, 1-on, 0 off 1 bit
4. Paket WDOG
Je paket »watchdog« oziroma obrambni mehanizem, ki ga pošilja aplikacija
vakuumski komori. Paket WDOG varuje sistem s časovnikom. Če aplikacija
določen interval ne pošlje paketa WDOG, vakuumska komora prekine izvajanje
gretja, hlajenja in izsesavanja zraka, saj sklepa, da je prišlo do motenj v delovanju
aplikacije.
TABELA 3.7 ZGRADBA PAKETA WDOG
Ime parametra Namen Dolžina
parametra
1. / Pošlje se heksadecimalna vrednost
0x04, kar pomeni decimalno vrednost
4, kar je ime paketa WDOG
1 bit
5. Paket TIME
Je paket, ki vsebuje podatke o času in ga aplikacija pošlje vakuumski komori.
Dolžina paketa je 4 bite. Prvi bit je ime paketa. Pošlje se le ob vzpostavitvi serijske
povezave med računalnikom in vakuumsko komoro. Namen tega paketa je, da si
komora nastavi trenutni čas.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 41
TABELA 3.8 ZGRADBA PAKETA TIME
Ime parametra Namen Dolžina
parametra
1. DateTime.Now.Hour Podatek o uri aplikacije 1 bit
2. DateTime.Now.Minute Podatek o minutah aplikacije 1 bit
3. DateTime.Now.Second Podatek o sekundah aplikacije 1 bit
3.12 Temperaturni senzor površine
Aplikaciji je dodan tudi modul za spektralno merjenje temperature na površini mizice v
komori (Slika 3.12). Merimo lahko:
celotno površino mizice,
izbrano površino mizice,
poljubno točko na površini mizice.
SLIKA 3.12 MODUL APLIKACIJE ZA SPEKTRALNO MERJENJE TEMPERATURE

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 42
3.13 Programsko okolje Visual Studio
Za razvoj aplikacije smo uporabili razvojno okolje proizvajalca Microsoft in sicer Visual
Studio 2008 C#. Visual Studio je integrirano razvojno okolje, ki se uporablja za razvoj
konzolnih aplikacij, grafičnih uporabniških aplikacij (GUI), Windows form, spletnih strani,
spletnih aplikacij in spletnih servisov.
Podpira različne programske jezike. Vgrajeni so jeziki C/C++, VB.NET in C# [5].
3.14 Programski jezik C#
C Sharp je programski jezik, ki je postopkoven, funkcionalen, generičen in objektno
naravnan, kar pomeni, da je razredno orientiran. Razvit je bil s strani podjetja Microsoft.
C# je integriran v programsko okolje Visual Studio, ker je preprost, moderen in je
namenjen splošni uporabi programskega jezika [6].
3.15 Future Technology Devices International – FTDI
Komunikacija med računalnikom, na katerem je nameščena aplikacija, in komoro poteka
preko vmesnika FTDI. FTDI [16] je kratica za podjetje Future Technology Devices
International, ki je specializirano za univerzalna serijska vodila (USB).
Povezava med napravama se vzpostavi tako, da preko USB priključka na računalnik
povežemo FTDI čip, ob pogoju, da je na operacijskem sistemu nameščen ustrezen gonilnik
za FTDI vmesnik. FTDI naredi virtualna COM vrata, ki deluje na enak princip kot klasičen
COM priključek. Le-ta deluje preko serijske povezave. Serijska komunikacija [7] je
komunikacija med dvema napravama, kjer se informacije prenašajo bit po bit.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 43
4 Meritve in rezultati
Delovanje aplikacije smo prikazali na primeru temperaturno spremenljivega upora –
termistorja. Izmeriti je bilo potrebno padec napetosti na uporu in tok skozi upor. Z
izmerjenima podatkoma smo lahko izračunali upornost termistorja ob določeni
temperaturi. Podatke smo primerjali s kataloškimi podatki proizvajalca termistorja. Vse
podatke smo prikazali v tabelah.
Termistor smo povezali z napravo za zajemanje. Merili smo padec napetosti na termistorju
pri temperaturno spremenljivih pogojih in tok skozi termistor. Napetostni izhod naprave za
zajemanje smo nastavili na enosmerno napetost DC. Vrednost napetostnega kanala je
znašala 5 V. Kot vhodna kanala na napravi za zajem podatkov smo nastavili kanal AI0, ki
je služil za merjenje napetosti in kanal AI1, ki je služil kot kanal za merjenje električnega
toka skozi termistor. Vakuumsko komoro smo nastavili na temperaturno območje med
temperaturama -30 °C in 80 °C. Naredili smo 2 cikla od maksimalne do minimalne
temperature pri vakuumu.
4.1 Preizkusna komponenta
Preizkusna komponenta je termistor (Slika 4.1) NTC SMD B57891M0103. Njegova
upornost pri sobni temperaturi 25 °C je 10.000 Ohmov. Njegova RT/R25 karakteristika, kar
pomeni razmerje upornosti med želeno temperaturo in temperaturo 25 °C, je 4901 (Slika
4.2).

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 44
SLIKA 4.1 DEJANSKA SLIKA TERMISTORJA
Sliko smo zajeli s kamero na endoskopu in jo shranili na računalnik s pomočjo programa
VLC. Termistor smo obtežili s kovinsko ploščico, da je imela boljši stik s površino mizice.
Z boljšim stikom termistorja s površino mizice smo zagotovili, da je bil prenos toplote med
mizico in termistorjem boljši. Termistor smo postavili na sredino mizice.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 45
SLIKA 4.2 RT KARAKTERISTIKA PREIZKUSNEGA TERMISTORJA [15]

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 46
4.2 Vezava preizkusne komponente
Po usmeritvi termistorja v vakuumsko komoro, smo naredili povezavo z napravo za
zajemanje na način, kot kaže shema (Slika 4.3) in enačba (4.1). V točki V' smo merili tok I
in napetost V. Točko V' smo povezali na vhod naprave za zajemanje kanala AI0, za
merjenje napetosti in na kanal AI1, za merjenje toka, ki teče skozi termistor R1.
SLIKA 4.3 VEZAVA PREIZKUSNEGA TERMISTORJA
1
2 2
' RV UVI
R R
, 2
'V VR
I
(4.1)
1
2
10 - pri 25°C
1
R k
R k
Primer:
Temperatura je bila 15 minut na 80 °C pri histerezi 0,25 °C. Termistor R1 znaša 10 kOhm
pri temperaturi 25 °C. Upor R2 pa 1 kOhm. Vhodna napetost vezja oz. izhod naprave za
zajem DAQ je znašala 5 V. Na podlagi 281 meritev, ki so bile zabeležene v času petnajstih
minut, je povprečna vrednost napetosti v točki V' pri 80 °C znašala 2,814 V. Kolikšna je
vrednost termistorja pri 80 °C in kolikšno je razmerje RT/R25?

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 47
25
' 5 2,8140,002186
1
' 5 (5 2,814 )1287,28
0,002186
1287,280,1287
10
T
T
V V VI A
R k
V V V V VR
I A
R
R k
(4.2)
Pri tem izračunu (4.2) smo vzeli vrednost, ki ni povprečna vrednost več meritev, ampak
vrednost, ki se je ob meritvah najbolj približala vrednosti v proizvajalčevi tabeli. Razlika je
v tem primeru zelo majhna. Izračun je pokazal vrednost RT/R25 = 0,1287. Vrednost
proizvajalca je 0,12901. Razlika je samo 0,00031. Relativna napaka znaša le 0,24 %. V
točki »3.5 Primerjava med izmerjenimi vrednostmi in vrednostmi proizvajalca« bodo
predstavljeni podatki, ki temeljijo na povprečnih vrednostih več meritev, zato bo
odstopanje večje.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 48
4.3 Meritve preizkusne komponente
Meritve, katere smo zabeležili v datoteko, smo uvozili v programsko orodje Microsoft
Office Excel. Glede na temperaturo smo v grafu narisali napetostno in tokovno odvisnost.
4.3.1 Merjenje napetosti
Na termistorju je bila napetost pri 80 °C približno 2,8 V, pri -30 °C pa nekoliko manj kot 5
V, saj se pri nizkih temperaturah na uporu troši zelo malo moči. Temperaturo smo 15
minut držali na 80 °C in -30 °C. Ker preizkusna komponenta potrebuje dalj časa, da se
segreje na enako temperaturo kot mizica, zaradi prenosa toplote, je tudi napetost v
petnajstih minutah nekoliko padla pri najvišji temperaturi oziroma narasla pri najnižji
temperaturi. Graf (Slika 4.4) prikazuje spreminjanje napetosti v odvisnosti od časa med
temperaturama 80 °C in -30 °C.
SLIKA 4.4 GRAF SPREMINJANJA NAPETOSTI V ODVISNOSTI OD TEMPERATURE
4.3.2 Merjenje električnega toka
Tok in napetost sta po Ohmovem zakonu linearno povezana z enačbo *U R I , zato je na
grafu, kjer je prikazana tokovna odvisnost, tok najvišji, kjer je bila napetost najnižja. Tudi
pri toku se je zgodilo enako kot pri napetosti. Poraba toka je v petnajst minutnem držanju
temperature na bodisi 80 °C bodisi -30 °C nekoliko narasla oziroma padla.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 49
SLIKA 4.5 GRAF SPREMINJANJA ELEKTRIČNEGA TOKA V ODVISNOSTI OD TEMPERATURE
4.3.3 Spreminjanje upornosti termistorja
Upornost termistorja je predstavljena v grafu v logaritemskem merilu. Najvišja upornost
termistorja je bila pri najnižji temperaturi. Upornost pri temperaturi -30 °C je znašala
približno 150 kΩ. Najnižja upornost je bila pri najvišji temperaturi. Pri temperaturi 80 °C
je znašala približno 1,3 kΩ. Ob gretju od -30 °C do 80 °C, je upornost padala linearno.
V prvem grafu (Slika 4.6) je prikazan cikel, kjer smo ohlajali komoro iz 80 °C na -30 °C.
Upornost ni enako linearna kot v drugem grafu (Slika 4.7), kjer smo komoro segrevali. Do
razlike v obliki krivulje je prišlo, saj hladilni in grelni sistem ne delujeta enako. V poglavju
»Gretje in hlajenje« je predstavljen graf, kateri prikazuje, kako se gretje in hlajenje
razlikujeta.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 50
SLIKA 4.6 GRAF SPREMINJANJA UPORNOSTI PRI OHLAJANJU
SLIKA 4.7 GRAF SPREMINJANJA UPORNOSTI PRI SEGREVANJU

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 51
4.3.4 Primerjava med izmerjenimi vrednostmi in vrednostmi
proizvajalca
Proizvajalec v svojem dokumentu ne podaja vrednosti za meritve v vakuumu. Vrednosti
proizvajalca termistorja so bile podane pri atmosferskem tlaku, medtem ko smo naše
meritve podali v vakuumu. Za primerjavo smo vzeli grelni cikel merilnih podatkov, saj se
krivulja grelnega cikla bolj približa linearnosti od cikla, kjer smo komoro ohlajevali.
Če primerjamo obe krivulji, ugotovimo, da se vrednosti krivulj v skrajnih točkah, pri 80 °C
in -30 °C, zelo približata. Pri gretju komore pa se razmik vrednosti faktorja RT/R25 med
krivuljama poveča. Vzrok za to razliko je, ker smo temperaturo na skrajnih mejah držali 15
minut in se je temperatura termistorja zelo približala temperaturi mizice v komori, medtem
ko se pri gretju termistor ni grel popolnoma enako kot mizica v komori. Prenos toplote se
ne zgodi v trenutku, zato bi morali ob vsaki želeni meritvi temperaturo držati določeno
daljše časovno obdobje.
RT/RT25
0
2
4
6
8
10
12
14
16
18
20
-30 -10 10 30 50 70
Temperatura[°C]
RT
/RT
25
Dejanska vrednost RT/RT25 Vrednost iz tabele RT/RT25
SLIKA 4.8 PRIMERJAVA DEJANSKE VREDOSTI Z VREDNOSTJO PROIZVAJALCA RT/R25

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 52
Tabela 4.1 in graf (Slika 4.9) prikazujeta primerjavo med povprečnimi izmerjenimi
vrednostmi RT/R25 in vrednostmi, ki jih podaja proizvajalec pri atmosferskem tlaku. V
tabeli 4.1 je prikazana tudi razlika med vrednostma ter relativna napaka.
Relativno napako smo izračunali po enačbi (4.3).
xr
x
(4.3)
r – relativna napaka
Δx - odmik od povprečja
x - povprečna vrednost
SLIKA 4.9 GRAF ODSTOPANJA RT/R25 V ODVISNOSTI OD TEMPERATURE T

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 53
TABELA 4.1 PRIMERJAVA DEJANSKIH VREDNOSTI RT/R25 IN PROIZVAJALČEVIH PRI ATMOSFERSKEM TLAKU
Temperatura[°C] RT/R25 [15]
Povprečna RT/RT25
izmerjena
v vakuumu
(na podlagi več
meritev) Odstopanje
Relativna
napaka [%]
-30 16,915 14,60827281 2,306727 13,63716931
-25 12,555 15,58352035 3,02852 24,12202588
-20 9,4143 11,67890737 2,264607 24,05497353
-15 7,1172 9,432009737 2,31481 32,52416312
-10 5,4308 7,365199055 1,934399 35,61904425
-5 4,1505 5,878004831 1,727505 41,62160779
0 3,2014 5,036254127 1,834854 57,31411654
5 2,5011 3,682884804 1,181785 47,2506019
10 1,9691 2,932518884 0,963419 48,92686424
15 1,5618 2,51250372 0,950704 60,87230889
20 1,2474 1,875171518 0,627772 50,32640038
25 1 1,496519219 0,496519 49,65192195
30 0,808 1,202220247 0,39422 48,78963457
35 0,6569 0,968658472 0,311758 47,45904581
40 0,5372 0,788354674 0,251155 46,75254541
45 0,44235 0,636229237 0,193879 43,82937436
50 0,3661 0,519350451 0,15325 41,86027064
55 0,30393 0,32091764 0,016988 39,70250054
60 0,25359 0,348765651 0,095176 37,53131078
65 0,21283 0,28737647 0,074546 35,02629779
70 0,17942 0,238805897 0,059386 33,09881682
75 0,15183 0,198830401 0,047 30,95593828
80 0,12901 0,153860029 0,02485 19,26209504

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 54
4.4 Primerjava vrednosti med dvema cikloma
Primerjava vrednosti RT/R25 med dvema povprečnima rezultatoma, kjer je natančnost
največja, pri temperaturi 80 °C je sledeča. Pri obeh ciklih je bila temperatura na 80 °C 15
minut. V prvem ciklu je znašala povprečna vrednost RT/R25 = 0,129604, v drugem pa
0,153860029. Razlika je 0,024256029. To pomeni, da razlika preračunana v upornost
znaša 242 Ohmov med enim in drugim ciklom.
4.5 Natančnost temperaturne histereze
Temperaturna histereza pri maksimalni temperaturi je nastavljena tako, da mora biti
temperatura znotraj območja, ki je četrtino stopinje pod, ali pol stopinje nad, od nastavljene
temperature, preden se vključi grelni oziroma hladilni sistem.
Moč grelcev lahko spreminjamo s pomočjo modulacije PWM. Tako lahko temperaturo
natančneje reguliramo. Regulacija poteka tako, da grelca delujeta s polno močjo, dokler ni
povprečna temperatura mizice v komori stopinjo nižja od želene. V tem primeru je želena
temperatura 80 °C. Pri temperaturi 79 °C preidemo v histerezno območje. V tem območju
se začne izračun vrednosti PWM za oba grelca in se izračunava, dokler ne dosežemo
temperature, ki je četrtino stopinje pod želeno temperaturo. Ko temperatura doseže
vrednost, ki je za četrtino manjša od želene temperature, se grelca izključita, saj se zaradi
počasnega prenosa toplote velike površine mizice v komori, temperatura še nekoliko
dvigne.
Izračun vrednosti PWM, kadar je temperatura manj kot stopinjo od želene vrednosti ali
hkrati nižja od četrtine stopinje od želene vrednosti, poteka s pomočjo funkcije. Funkcija,
ki na vhodu dobi želeno temperaturo in povprečno vrednost temperature mizice v komori,
izračuna razliko med želeno vrednostjo in povprečno temperaturo mizice v komori.
Razliko pomnoži z vrednostjo 240 in pošlje vrednost na izhod. Manjša kot je razlika med
želeno vrednostjo in povprečno vrednostjo mizice v komori, manjši je faktor PWM. Manjši
kot je faktor PWM manj moči porabljata grelca. Vrednost 240 smo določili
eksperimentalno. Pri tej vrednosti smo dobili rezultate, kot so prikazani v grafu.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 55
SLIKA 4.10 GRAF TEMPERATURNE HISTEREZE PRI MAKSIMALNI TEMPERATURI
Hladilni sistem deluje vedno s polno močjo. Kadar je temperatura za pol stopinje večja od
želene vrednosti, se hladilni sistem vključi in, kadar je manjša od pol stopinje od želene
temperature, se izključi. Območje je večje kot pri gretju, saj pri hlajenju nimamo
modulacije, s katero bi lahko regulirali moč hlajenja.
SLIKA 4.11 GRAF TEMPERATURNE HISTEREZE PRI MINIMALNI TEMPERATURI
4.6 Hlajenje in gretje
S preizkusom smo naredili 2 cikla. Iz grafa (Slika 4.12) je razvidno, da se del temperaturne
krivulje, ko je tekel cikel gretja, veliko bolj približa linearnosti, kot del krivulje, kjer je
tekel cikel hlajenja.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 56
-40
-20
0
20
40
60
80
10010:55:53 11:24:41 11:53:29 12:22:17 12:51:05 13:19:53 13:48:41 14:17:29
Te
mp
era
tura
[°C
]
Čas
Temperatura
Linearno naraščanje temperature Linearno padanje temperature
Temperaturna krivulja
SLIKA 4.12 GRAF TEMPERATURNE ODVISNOSTI OD ČASA
Zaradi počasnega prenosa toplote v aluminiju, iz katerega je mizica v vakuumski komori,
se celotna mizica segreva bolj enakomerno, saj je segrevanje počasnejše in preizkušena
komponenta enakomerneje sprejema toploto od mizice. Hlajenje ni tako linearno med
temperaturama -30 °C in 80 °C kot pri segrevanju, zato je razlika med različnimi
temperaturnimi področji mizice večja kot pri segrevanju in se tako pojavi razlika med
meritvami pri isti temperaturi ob grelnem delu cikla in hlajenem delu cikla. Tako, da smo
meritve spremljali ob grelnih ciklih, zaradi večje linearnosti.
4.7 Hitrost naraščanja in padanja temperature
Iz grafa (Slika 4.12) je razvidno, da tudi, če del krivulje, kjer ohlajamo, lineariziramo ter
linearizirano primerjamo z grelnim delom krivulje, spreminjanje temperature s časom ni
pri obeh delih krivulj enako. Zato smo naredili izračun, kako hitro lahko glede na čas,
grelni sistem greje ter kako hitro lahko hladilni sistem hladi.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 57
Izračun padanja in naraščanja temperature (4.4):
( )T
T tt
(4.4)
T(t) – spreminjanje temperature s časom
ΔT – sprememba temperature
Δt – sprememba časa
Cikel hlajenja:
Točka grelnega maksimuma ob času t1 11:03:02 je bila T1 79,7475 °C. Točka
ohlajevalnega minimuma ob času t2 12:03:11 je bila T2 -30,0125 °C.
1 2min
1 2
109,76( ) ( ) 0,03 1,82
3609C C
s
T T CT t abs
t t s
(4.5)
Cikel segrevanja:
Točka ohlajevalnega minimuma ob času t1 12:18:11 je bila T1 -29,3725 °C. Točka
grelnega maksimuma ob času t2 13:12:55 je bila T2 79,8725 °C.
1 2min
1 2
109,245( ) ( ) 0,033 1,996
3284C C
s
T T CT t abs
t t s
(4.6)
Grelni cikel je glede na izračun iz enačb 4.5 in 4.6 krajši, saj segrevamo v povprečju z
1,996 °C/min, hladimo pa z 1,82 °C/min. Razlika sicer ni zelo velika. Znaša 0,176 °C/min,
vendar je pri velikem temperaturnem razponu med minimumom in maksimumom razlika v
času precejšnja.
4.8 Ustvarjanje vakuuma
Vakuum ustvarjamo s pomočjo treh vakuumskih črpalk. Aplikacija deluje tako, da
temperaturne regulacije ne moramo začeti, dokler vakuum ne doseže določene vrednosti.
Vrednost, kjer začnemo temperaturno regulacijo, in s tem z merjenjem podatkov na
napravi za zajemanje, je 0,5 mBar. V preizkusu s termistorjem, ki smo ga opravili, smo
uporabili le rotacijsko in turbomolekularno črpalko. Skupaj sta črpalki ustvarili pritisk
približno 0,03 mBar (Slika 4.13).

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 58
SLIKA 4.13 GRAF TLAKA V ODVISNOSTI OD ČASA
Tlak je precej hitro upadal do vrednosti 0,1 mBar. Mejo za zajem podatkov pri 0,5 mBar
smo določili prav zato, da lahko pokažemo vrednost, kjer se tlak v komori umiri, oziroma
postane dokaj konstanten. Iz grafa (4.14), ki je zoženo časovno območje grafa (Slika 4.13)
bomo izračunali povprečno vrednost padanja tlaka med območjema 0,5 mBar in 0,1 mBar
(4.7).
Točka p1 pri tlaku 0,485 je bila ob času 10:55:54. Točka p2 pri tlaku 0,1 je bila ob času
10:57:53.
1 2min
1 2
0,385( ) ( ) 0,00324 0,194
119mBar mBar
s
p p mBarp t abs
t t s
(4.7)

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 59
SLIKA 4.14 GRAF TLAKA V ODVISNOSTI OD ČASA
4.9 Temperaturna slika
S pomočjo brezkontaktnega IR merilnika temperature lahko pogledamo spekter
temperature na mizici. Pogledamo lahko temperaturo na celotni površini (Slika 4.16), na
določenem delu površine (Slika 4.15) ali pa samo v določeni točki.
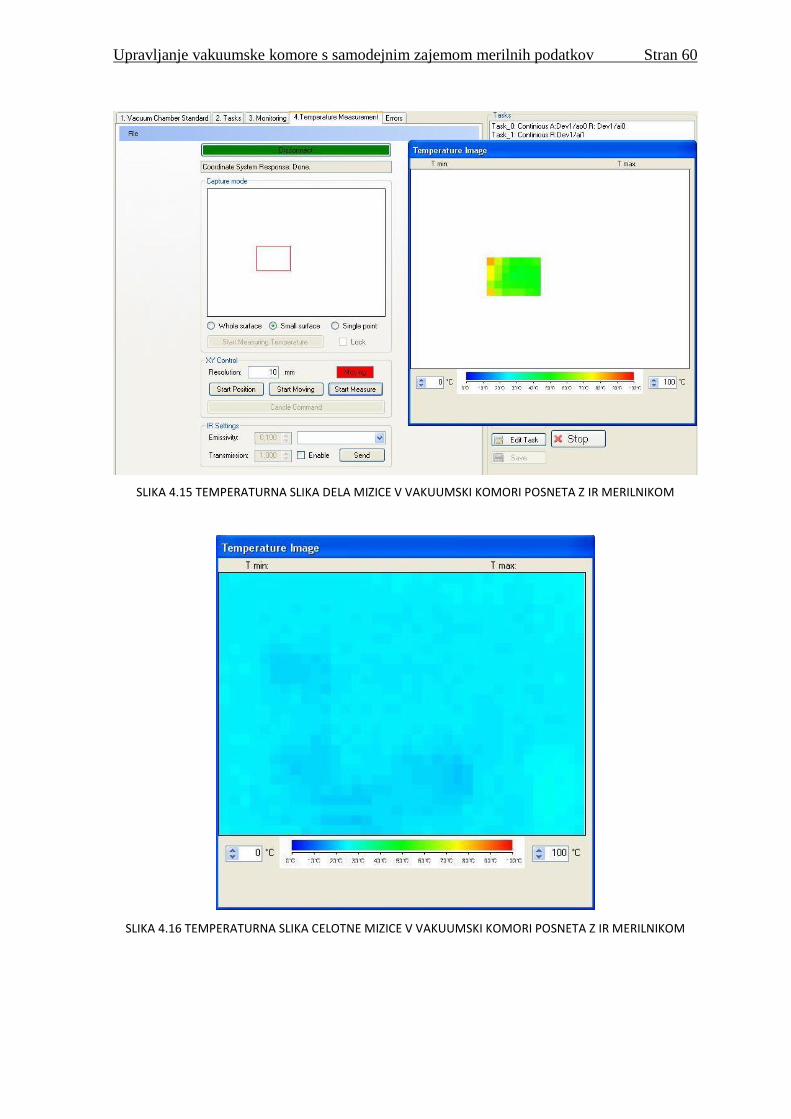
Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 60
SLIKA 4.15 TEMPERATURNA SLIKA DELA MIZICE V VAKUUMSKI KOMORI POSNETA Z IR MERILNIKOM
SLIKA 4.16 TEMPERATURNA SLIKA CELOTNE MIZICE V VAKUUMSKI KOMORI POSNETA Z IR MERILNIKOM

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 61
5 Sklep
Ob izdelavi aplikacije za upravljanje vakuumske komore s samodejnim zajemom merilnih
podatkov smo se soočili z izzivom, kako preizkušati elektronske komponente v
spremenljivih pogojih. Vakuumska komora je namenjena spremljanju obnašanja v
določenih spremenljivih pogojih, vendar ni zgrajena tako, da bi lahko simulirali takšne
pogoje, kot jih določajo standardi, ampak, da se v študentskih projektih pokaže delovanje
novo razvitih naprav v spremenljivih pogojih. Predstavili smo nekaj standardov, katerim
ustrezamo. Veliko standardov se nanaša na specifične komponente, zato smo te izvzeli, saj
jih je preveč.
Kolikor nam je strojna oprema omogočala, samo se v aplikaciji poskušali približati
želenemu cilju. Temperaturno regulacijo smo naredili dovolj natančno, medtem ko na
vakuumsko regulacijo nismo imeli večjega vpliva, saj trenuten sistem ne omogoča
nastavljanja želenega vakuuma. Usklajenost, oziroma sinhronost delovanja vakuumske
komore z zajemom podatkov je zelo natančna, saj merilne podatke vzorčimo zelo pogosto.
Prikaz podatkov pri sprotnem spremljanju grafa znotraj aplikacije je nekoliko zakasnjen ob
večjem številu nalog. Zakasnitev je posledica beleženja podatkov v pomnilniku. V
pomnilnik shranjujemo podatke zaradi sprotnega zapisovanja v datoteke.
Ena izmed večjih težav je bila razlika med ohlajevanjem in gretjem. Sistem za gretje greje
dokaj linearno in se merjena komponenta tudi enakomerneje segreva, medtem ko hladilni
sistem ne hladi enakomerno po celotnem temperaturnem območju. Odločili smo se, da
bomo uporabili meritve ob grelnih ciklih zaradi enakomernosti gretja. Ob primerjavi
vrednosti dveh ciklov smo opazili, da je razlika v upornosti termistorja precej velika. To
pomeni, da rezultati niso povsem ponovljivi.

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 62
6 Literatura
[1] M. Solar, Meritve v elektroniki, Založništvo FERI, Maribor, 2001
[2] ed. R. Kirschman, J. Wiley & Sons/IEEE Press, High-Temperature Electronics,
1998/1999
[3] Commitee on Materials for High-Temperature Semiconductor Devices, Materials
for High-Temperature Semiconductor Devices, Washington D.C., 1995
[4] Outgassing, Wikipedia, http://en.wikipedia.org/wiki/Outgassing, 2013
[5] Visual Studio 2008, Wikipedia,
http://en.wikipedia.org/wiki/Microsoft_Visual_Studio#Visual_Studio_2008, 2014
[6] C Sharp (programming language), Wikipedia,
http://en.wikipedia.org/wiki/C_Sharp_(programming_language), 2014
[7] Serial port, Wikipedia, http://en.wikipedia.org/wiki/Serial_port, 2014
[8] Dallas DS18B20, Datasheet,
http://dlnmh9ip6v2uc.cloudfront.net/datasheets/Sensors/Temp/DS18B20.pdf, 2014
[9] National Instruments, DAQ X Series User manual, 2009
[10] Pfeiffer Vacuum, Vacuum Technology Know How,
http://www.pfeiffer-vacuum.com/, 2014
[11] Department Of Defense Test Method Standard: Microcircuits, MIL-STD-883H,
2010

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 63
[12] European Coorporation for Space Standardization, ECSS-E-10-02A Space
Engeenering: Validation, Noordwijk, 1998
[13] European Coorporation for Space Standardization, ECSS-E-10-03A Space
Engeenering: Testing, Noordwijk, 2002
[14] Thermistor NTC, Wikipedia, http://en.wikipedia.org/wiki/Thermistor#NTC, 2014
[15] Epcos, NTC thermistors for temperature measurements, Datasheet, 2013
[16] FTDI, Wikipedia, http://en.wikipedia.org/wiki/FTDI, 2012
[17] PTC, Wikipedia, http://en.wikipedia.org/wiki/Thermistor#PTC, 2014
[18] R. Kirschman, Tutorials, http://www.extremetemperatureelectronics.com/, 2012
[19] Vacuum, Wikipedia, http://en.wikipedia.org/wiki/Vacuum, 2014

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 64
KAZALO SLIK
SLIKA 2.1 VAKUUMSKA KOMORA .......................................................................................................................2
SLIKA 2.2 DALLASOV TEMPERATURNI SENZOR [8] .............................................................................................3
SLIKA 2.3 TEMPERATURNI REGISTER [8] ............................................................................................................3
SLIKA 2.4 NOTRANJOST VAKUUMSKE KOMORE IN IR MERILNIK TEMPERATURE ..............................................4
SLIKA 2.5 MONITOR ENDOSKOPSKE KAMERE ....................................................................................................5
SLIKA 2.6 ENDOSKOPSKA KAMERA .....................................................................................................................5
SLIKA 2.7 PRIMER KONTAKTOV [18] .................................................................................................................12
SLIKA 3.1 ZGRADBA NI-DAQ 6343 [9] ...............................................................................................................23
SLIKA 3.2 VHODNO/IZHODNE POVEZAVE NAPRAVE NI-DAQ [9] ......................................................................24
SLIKA 3.3 SHEMA ANALOGNIH VHODOV NAPRAVE NI-DAQ [9] .......................................................................25
SLIKA 3.4 SHEMA ANALOGNIH IZHODOV NAPRAVE NI-DAQ [9] ......................................................................27
SLIKA 3.5 SHEMA DIGITALNIH VHODOV IN IZHODOV [9] .................................................................................28
SLIKA 3.6 GUI UPRAVITELJ PARAMETROV STANDARDOV ................................................................................30
SLIKA 3.7 SLIKA NASTAVITEV PARAMETROV VAKUUMSKE KOMORE ..............................................................31
SLIKA 3.8 GUI VMESNIK ZA PRIKAZ NASTAVITEV OPRAVIL V APLIKACIJI ..........................................................32
SLIKA 3.9 SPREMLJANJE POGOJEV V VAKUUMSKI KOMORI IN DELOVANJE ....................................................33
SLIKA 3.10 SLIKA SEZNAMA NALOG..................................................................................................................35
SLIKA 3.11 GRAF ZAJEMA PODATKOV NA IZBRANEM KANALU ........................................................................36
SLIKA 3.12 MODUL APLIKACIJE ZA SPEKTRALNO MERJENJE TEMPERATURE ...................................................41
SLIKA 4.1 DEJANSKA SLIKA TERMISTORJA ........................................................................................................44
SLIKA 4.2 RT KARAKTERISTIKA PREIZKUSNEGA TERMISTORJA [15] ..................................................................45
SLIKA 4.3 VEZAVA PREIZKUSNEGA TERMISTORJA ............................................................................................46
SLIKA 4.4 GRAF SPREMINJANJA NAPETOSTI V ODVISNOSTI OD TEMPERATURE .............................................48
SLIKA 4.5 GRAF SPREMINJANJA ELEKTRIČNEGA TOKA V ODVISNOSTI OD TEMPERATURE ..............................49
SLIKA 4.6 GRAF SPREMINJANJA UPORNOSTI PRI OHLAJANJU .........................................................................50
SLIKA 4.7 GRAF SPREMINJANJA UPORNOSTI PRI SEGREVANJU .......................................................................50
SLIKA 4.8 PRIMERJAVA DEJANSKE VREDOSTI Z VREDNOSTJO PROIZVAJALCA RT/R25 ....................................51
SLIKA 4.9 GRAF ODSTOPANJA RT/R25 V ODVISNOSTI OD TEMPERATURE T ....................................................52
SLIKA 4.10 GRAF TEMPERATURNE HISTEREZE PRI MAKSIMALNI TEMPERATURI .............................................55
SLIKA 4.11 GRAF TEMPERATURNE HISTEREZE PRI MINIMALNI TEMPERATURI ...............................................55
SLIKA 4.12 GRAF TEMPERATURNE ODVISNOSTI OD ČASA ...............................................................................56
SLIKA 4.13 GRAF TLAKA V ODVISNOSTI OD ČASA.............................................................................................58
SLIKA 4.14 GRAF TLAKA V ODVISNOSTI OD ČASA.............................................................................................59
SLIKA 4.15 TEMPERATURNA SLIKA DELA MIZICE V VAKUUMSKI KOMORI POSNETA Z IR MERILNIKOM .........60
SLIKA 4.16 TEMPERATURNA SLIKA CELOTNE MIZICE V VAKUUMSKI KOMORI POSNETA Z IR MERILNIKOM ...60

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 65

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 66

Upravljanje vakuumske komore s samodejnim zajemom merilnih podatkov Stran 67





























