8/14/2019 Underneath the Streets of Toronto Lies a 30 Km
Network
5/13
PATH base map_public spacesOption 1_superimposed grid
Option _cells recongured to grid
x
y
0,0 1,0 ,0 3,0 4,0 5,0 6,0 7,0 8,0 9,0 10,0 1 1, 0 1 , 0 1 3, 0
14,0 15,0
0,1 1,1 ,1 3,1 4,1 5,1 6,1 7,1 8,1 9,1 10,1 1 1, 1 1 , 1 13,1
14,1 15,1
0, 1, , 3, 4, 5, 6, 7, 8, 9, 10, 1 1, 1 , 1 3, 14, 15,
0,3 1,3 ,3 3,3 4,3 5,3 6,3 7,3 8,3 9,3 10,3 1 1, 3 1 , 3 1 3, 3
14,3 15,3
0,4 1,4 ,4 3,4 4,4 5,4 6,4 7,4 8,4 9,4 10,4 1 1, 4 1 , 4 1 3, 4
14,4 15,4
0,5 1,5 ,5 3,5 4,5 5,5 6,5 7,5 8,5 9,5 10,5 1 1, 5 1 , 5 1 3, 5
14,5 15,5
0,6 1,6 ,6 3,6 4,6 5,6 6,6 7,6 8,6 9,6 10,6 1 1, 6 1 , 6 1 3, 6
14,6 15,6
0,7 1,7 ,7 3,7 4,7 5,7 6,7 7,7 8,7 9,7 10,7 11,7 12,7 13,7 14,7
15,7
0,8 1,8 ,8 3,8 4,8 5,8 6,8 7,8 8,8 9,8 10,8 1 1, 8 1 , 8 1 3, 8
14,8 15,8
0,9 1,9 ,9 3,9 4,9 5,9 6,9 7,9 8,9 9,9 10,9 1 1, 9 1 , 9 1 3, 9
14,9 15,9
0,10 1,10 ,1 0 3 ,1 0 4 ,1 0 5 ,1 0 6 ,1 0 7,10 8,10 9,10 10,10
11,10 1,1013,10 14,10 15,10
0,11 1,11 ,1 1 3 ,1 1 4 ,1 1 5 ,1 1 6 ,1 1 7,11 8,11 9,11 10,11
11,111,11 13,11 14,11 15,11
0,1 1,1 ,1 3 ,1 4 ,1 5 ,1 6 ,1 7,1 8,1 9,1 10,1 11,11,1 13,12
14,1 15,1
0,13 1,13 ,1 3 3 ,1 3 4,13 5,13 6,13 7,13 8,13 9,13 10,13
11,131,13 13,13 14,13 15,13
0,14 1,14 ,1 4 3 ,1 4 4,14 5,14 6,14 7,14 8,14 9,14 10,14
11,141,14 13,14 14,14 15,14
0,15 1,15 ,1 5 3 ,1 5 4 ,1 5 5 ,1 5 6 ,1 5 7 ,1 5 8,15 9,15
10,15 11,15 1,1513,15 14,15 15,15
0,16 1,16 ,1 6 3 ,1 6 4,16 5,16 6,16 7,16 8,16 9,16 10,16
11,161,16 13,16 14,16 15,16
0,17 1,17 ,1 7 3 ,1 7 4,17 5,17 6,17 7,17 8,17 9,17 10,17 11,17
1,1713,17 14,17 15,17
0,18 1,18 ,1 8 3 ,1 8 4,18 5,18 6,18 7,18 8,18 9,18 10,18 11,18
1,1813,18 14,18 15,18
0,19 1,19 ,1 9 3 ,1 9 4 ,1 9 5 ,1 9 6,19 7,19 8,19 9,19 10,19
11,191,19 13,1914,19 15,19
0,0 1,0 , 0 3 , 0 4,0 5,0 6,0 7,0 8,0 9,20 10,0 11,01,0 13,0
14,0 15,0
0,1 1,1 , 1 3 , 1 4 , 1 5 , 1 6 , 1 7,1 8,1 9,1 10,1 11,11,1
13,1 14,1 15,1
0, 1, , 3 , 4, 5, 6, 7, 8,22 9,22 10, 11,22 1,13, 14, 15,
0,3 1,3 , 3 3 , 3 4 , 3 5 , 3 6,23 7,3 8,3 9,3 10,3 11,31,3 13,3
14,3 15,3
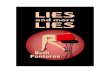
11,22 1,3active cell active cellinactive cell inactive cell
In order to simulate Cellular Automata, two options exist. The
rst is to superimpose a grid on top o the public spaces and
orceeach space to conorm into a square or rectangular shape
according to the structure o the grid. This method creates a 16 x 4
gridwith 384 cells. However, only 36 o the cells can be considered
active since the remainder o the cells do not contain a public
space.This must be accounted or when constituting the rules o
cellular automata, otherwise, some cells may remain inactive in
uture
generations and the system may reach a standstill.