Embed Size (px)
DESCRIPTION
a
Citation preview

1
Uderwater Technologies
Synthesis
1. Introduction
Water
• Small field in liquid phase (0 – 1000 Celsius);
• Maximum density at 40 Celsius;
• Growth of volume with 9 % when pass from the liquid phase to the solid phase;
• Possibility to dissolve a great number of substances;
• Big specific heat.
Sea water
• Salinity about 3,5%:
Cl- 55,0; SO4 -- 7,7; HCO3- 0,4; Br- 0,2;
F- 0,003; H3BO3 0,07; Na+ 30,6; Mg++ 3,7;
Ca++ 1,2; K+ 1,1; Sr++ 0,03.
• Density 1.023 – 1.027;
• Freezing point -20 Celsius.
Diving physics
• Archimedes principle
Any floating object displaces its own weight of fluid.
• Ideal gas law pV = n RT
Clapeyron : where p is the absolute pressure of the gas, V is the volume of the gas, n
is the amount of substance of gas (measured in moles), T is the absolute temperature
of the gas and R is the ideal, or universal, gas constant.
The International System of Units (SI) defines the amount of substance to be
proportional to the number of elementary entities present. The SI unit for amount of
substance is the mole. It has the unit symbol mol. The mole is defined as the amount
of substance that contains an equal number of elementary entities as there are atoms
in 12g of the isotope carbon-12.[1] This number is called Avogadro's number and has
the value 6.02214129(30)×1023.[2] It is the numerical value of the Avogadro
constant which has the unit 1/mol, and relates the molar mass of an amount of
substance to its mass.
2
The gas constant value is R = 8.314 J/mol K
• Boyle-Mariotte law
At T = constant, pV = k.
• Gay-Lussac law
At V = constant, p/T = k.
• Charles’ law
At p = constant, V/T = k
• Dalton’s law
Dalton's law (also called Dalton's law of partial pressures) states that the total
pressure exerted by the mixture of non-reactive gases is equal to the sum of the partial
pressures of individual gases.
ptotal = p1 + p2 + … + pn , where p1, p2 , … pn represent the partial pressure of each
component.
• Henry’s law
Henry - At a constant temperature, the amount of a given gas that dissolves in a given
type and volume of liquid is directly proportional to the partial pressure of that gas in
equilibrium with that liquid.
The sound in the water
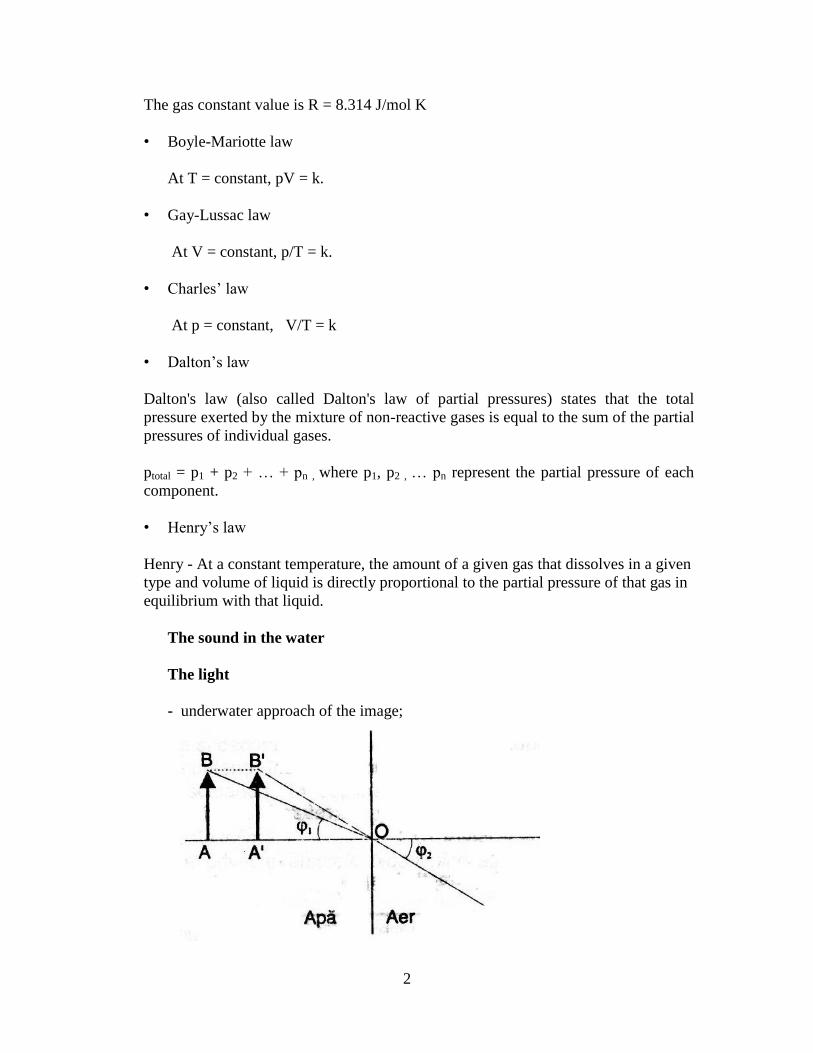
The light
- underwater approach of the image;

3
- reflection and refraction;
- scatter and diffusion;
The way light diffuses as it interacts with matter, depends on the size of the particles.
Particles as large as phyto plankton but not visible to the naked eye (0.1 to 10
micrometer) act like mist particles, reflecting all color components of the light back to
where it came from.
- absorption of colors;
Water particles interact with light by absorbing certain wave lengths. First the reds
and oranges disappear, later the yellows, greens and purples and last the blue. Loss of the
colour red is dramatic and is already noticeable at 50cm.
- distortion of the image.
Deforming image phenomenon due to distance from the optic axis.
2. Pressure effects
• Mechanical;
• Bio physical;
• Bio chemical.

4
2.1 Mechanical effects of the pressure
Eardrum (Tympanic membrane) bar trauma
In human anatomy, the eardrum, or tympanic membrane, is a thin, cone-shaped
membrane that separates the external ear from the middle ear in humans and other tetra
pods.
Unintentional rupture of the ear drum has been described in blast injuries during
diving.
• Breathing effort due to the viscosity of the air at high pressure
• Sinus
The sinuses similar to other air filled cavities are susceptible to barotrauma if their
openings become obstructed.
• Pulmonary overpressure
Lung pressure damage in scuba divers is usually caused by breath-holding on ascent.
The compressed gas in the lungs expands as the ambient pressure decreases causing the
lungs to over expand and rupture unless the diver breathes out.
• Donald Duck talk
Speech made when breathing helium gas is often called Donald Duck talk. This gas
mixture alters sound waves due to its low weight and density. This raises the resonating
frequency of the vocal cords by an octave shift up. Such speech is unintelligible largely
due to the upward pitch shift in speech formants.[8] Intelligibility is an important
communication problem in deep sea diving. The technological solution involves
unscrambling by electronic transcoders.

5
2.2 Bio physical effects of the pressure - dissolution of the inert gas in the tissues
When a diver descends in the water the hydrostatic pressure, and therefore the
ambient pressure, rises. Breathing gas is supplied at the same pressure as the surrounding
water, and some of this gas dissolves into the diver's blood, and is transferred by the
blood circulation to other tissues. Inert gas continues to be taken up until the gas
dissolved in the diver is in a state of equilibrium with the breathing gas in the diver's
lungs, (see: "Saturation diving"), or the diver moves up in the water and reduces the
ambient pressure of the breathing gas until the inert gases dissolved in the tissues are at a
higher concentration than the equilibrium state, and start diffusing out again.
The dissolution velocity is proportional with the pressure difference:
pPkdt
dp
By integrating between initial time and certain time t, will obtain:
ktepPPp 0 ,
the exponential curve of gas dissolution in the tissues.

6
To safety exit is necessary to keep a small differan between the tissues pressure and
exterior pressure. That’s why the divers use the tables of decompression:
Depth 48 m, Interval 8 hours

7
Decompression of the tissues after saturation
________ desaturation curve - - - - - - saturation curve
2.3 Bio chemical effects of the pressure
• Oxygen toxicity (Lorraine-Smith effect)
Oxygen toxicity is a harmful effect due to the breathing of oxygen at elevated partial
pressures. The oxygen toxicity affects Central nervous system, characterized
by convulsions followed by unconsciousness.
• Nitrogen narcosis (Martini effect)
Narcosis while diving (also known as nitrogen narcosis, inert gas narcosis, raptures of the
deep, Martini effect), is a reversible alteration in consciousness that occurs while diving
at depth. It is caused by the anesthetic effect of certain gases at high pressure.
3. Underwater diving methods
• Divers
• Submersibles
• Unmanned submersibles
3.1 Divers
• Free diving, snorkeling
• SCUBA (self contained underwater breathing apparatus)
• Surface-supplied diving

8
• Diving bell
- wet,
- used with hyperbaric chambers,
- rescue
• Saturation diving
Free-diving is a form of underwater diving that relies on a diver's ability to
hold his or her breath until resurfacing rather than on the use of a breathing apparatus
such as scuba gear. Examples include breath-hold spear fishing, free dive photography,
recreational breath-hold diving, apnea competitions, and to some degree, snorkeling. The
activity that garners the most public attention is the extreme sport of competitive apnea in
which competitors attempt to attain great depths, times, or distances on a single breath.
Snorkeling is the practice of swimming on or through a body of water while equipped
with a diving mask, a shaped tube called a snorkel, and usually fins. In cooler waters, a
wetsuit may also be worn.
The 50 meter mark was first breached in 1962 by Enzo Maiorca; his rival Jacques
Mayol hit 100 meters 14 years later.
The Cuban Ferreras began free diving in the 1980s. His rivalry with Italian diver
Umberto Pelizzari pushed each to set a series of world records, but Ferreras came out on
top, hitting 162 meters in 2000, which was 12 meters deeper than Pelizzari ever reached.
2005 - Austrian Herbert Nitsch surpassed her record by safely diving to 172
meters.
At 200 meters below the ocean’s surface, there are no plants; sunlight cannot
penetrate that far. Belgian diver Patrick Musimu was the first to break that boundary.
Herbert Nitsch, 214m (702 feet), June 2007. He then set the world record for freediving.
SCUBA diving
1. Aqualung
2. Neoprene suit (wet suit)
3. Life line
4. Weight belt
5. Swim fins
6. Mask
7. Regulator
8. Jacket buoyancy
9. Depth gauge
10. Watch
11. Snorkel
12. Knife

9
Acvalung
1. Air Hose
2. Mouthpiece
3. Regulator
4. Harness
5. Back plate
6. Tank
Regulator
1. Piston first step
2. Spring
3. Piston second step
4. Membrane
5. Button
6. Levers
7. Exhaust valve

10
Surface-supplied diving
Divers use for breathing gas from the surface an umbilical, either from the shore
or from a diving support vessel.
• Heavy gear (standard)
• SASUBA (Surface Air Supply Underwater Breathing Apparatus)
• SNUDA The air, however, instead of coming from tanks strapped to the diver's
back, comes through a long hose from tanks on pontoon rafts on the surface.
Diving bell
Wet diving bell
1. Cable
2. Umbilical supply
3. Diver 1
4. Diver 2

11
Diving bell and hyperbaric chambers
Phases
Closed diving bell
1. Cable
2. Umbilical supply
3. Floating cover
4. Projectors
5. Breathing manifold
6. Storage (bailout) gas cylinders
7. Crash barrier
8. Solid ballast
9. Diver’s umbilical

12
Saturation diving
Saturation - diagram

13
3.2 Submersibles
• Deep Diving Manned Submersibles
• Batyscaphes
• Atmospheric Diving Suits
• Commercial Submersibles
• Submarines (millitary ones)
Deep Diving Manned Submersibles
ALVIN
1. Sonar
2. Current meter
3. Sail hatch
4. Hatch
5. Hatch viewport
6. High pressure air spheres
7. Lift propellers
8. Variable ballast
9. Buoyancy material
10. Stern propulsion
11. 22. Mercury trim tank
12. Main propulsion center
13. 14. Batteries 19. Electrical coupling 24. Forward
15. Batteries oil reservoir 20. Bottom viewport viewport
16. Frame 21. Electrical thru-hull 25. Ballast tank
17. Ballast center penetrators
18. Sphere release 23. Sphere

14
Metacentre and hull centre change during dive
Batyscaphes

15
3.3 Unmanned submersibles
• Remotely Operated Vehicles (ROVs)
• Underwater robots
Remotely operated vehicles (ROVs) repair offshore oil platforms and attach
cables to sunken ships to hoist them. Such remotely operated vehicles are attached by a
tether (a thick cable providing power and communications) to a control center on a ship.
Operators on the ship see video images sent back from the robot and may control its
propellers and manipulator arm. The wreck of the Titanic was explored by such a vehicle,
as well as by a manned vessel.
Classification based on their size, weight, ability or power:
• Micro - typically Micro-class ROVs are very small in size and weight. Today’s
Micro-Class ROVs can weigh less than 3 kg. These ROVs are used as an
alternative to a diver, specifically in places where a diver might not be able to
physically enter such as a sewer, pipeline or small cavity.
• Mini - typically Mini-Class ROVs weigh in around 15 kg. Mini-Class ROVs are
also used as a diver alternative. One person may be able to transport the complete
ROV system out with them on a small boat, deploy it and complete the job
without outside help. Some Micro and Mini classes are referred to as "eyeball"-
class to differentiate them from ROVs that may be able to perform intervention
tasks.
• General - typically less than 5 HP(propulsion); occasionally small three finger
manipulators grippers have been installed, such as on the very early RCV 225.
These ROVs may be able to carry a sonar unit and are usually used on light
survey applications. Typically the maximum working depth is less than 1,000
meters though one has been developed to go as deep as 7,000 m.
• Light Work class - typically less than 50 hp (propulsion). These ROVs may be
able to carry some manipulators. Their chassis may be made from polymers such
as polyethylene rather than the conventional stainless steel or aluminum alloys.
They typically have a maximum working depth less than 2000 m.

16
• Heavy Work class - typically less than 220 hp (propulsion) with an ability to carry
at least two manipulators. They have a working depth up to 3500 m.
• Trenching & Burial - typically more than 200 hp (propulsion) and not usually
greater than 500 hp (while some do exceed that) with an ability to carry a cable
laying sled and work at depths up to 6000 m in some cases.
1. Surface ship
2. Umbilical
3. ROV
4. Control panel
5. Floats
6. Motors
7. Arm
8. Lights, TV Camera, radar

17
Underwater robot or autonomous underwater vehicle (AUV) travels underwater
without requiring input from an operator.
Applications:
- commercial - the oil and gas industry uses AUVs to make detailed maps of the seafloor
before they start building subsea infrastructure; pipelines and sub sea completions can be
installed in the most cost effective manner with minimum disruption to the environment;
- research - scientists use AUVs to study lakes, the ocean, and the ocean floor. A variety
of sensors can be affixed to AUVs to measure the concentration of various elements or
compounds, the ab-sorption or reflection of light, and the presence of microscopic life;
- hobby;
- air crash investigations.
4. Underwater activities
• Observation and research
• Photo, film, TV
• Non destructive testing
• Assembling, disassembling
• Cutting and welding
• Aquaculture
• Archeology
• Sport and amusement, etc
4.1 Underwater photography, TV, film
It is usually done while scuba diving, but can be done while diving on surface
supply, snorkeling, from a submersible or ROVs, or from automated cameras lowered
from the surface.
Lighting
• Obstacle faced by underwater photographers is the loss of color and contrast when
submerged to any significant depth (get the camera as close to the photographic
subject as possible, minimizing the horizontal loss of color and use of flash to
restore any colour lost vertically through the water column).
18
• Another environmental effect is range of visibility.
• The water is seldom optimally clear, and the dissolved and suspended matter can
reduce visibility by both absorption and scattering of light.
Equipment
• water proof digital cameras;
• wide-angle lens or macro lens;
• external flash units;
• fish-eye port, which corrects the distortions.
Same problems for underwater film.
4.2 Underwater Inspection and Nondestructive Testing
• The underwater visual inspection is supplemented by nondestructive testing of the
critical welds or selected areas of the support piles of the structure, cabling, riser
inspections.
• Underwater sonar is proving an effective to in determining bridge scour that was
often left to a system of depth soundings taken in past inspections.
• Ultrasonic and magnetic particle are routinely used to determine wall thickness
and weld integrity on inland as well as offshore structures.
• Surveys.
4.3 Underwater welding:
- wet welding,
- one atmosphere welding
- hyperbaric welding.
Wet welding - underwater welding when the arc is operated in direct contact with
the water.
During wet welding, because of the proximity of cold sea water to the weld pool,
high cooling rates are experienced by the weld metal and its associated heat-affected
zone. In addition, dissociation of water within the welding arc ensures the presence of
hydrogen in the weld pool. Both of these phenomena adversely affect the final weld.
19
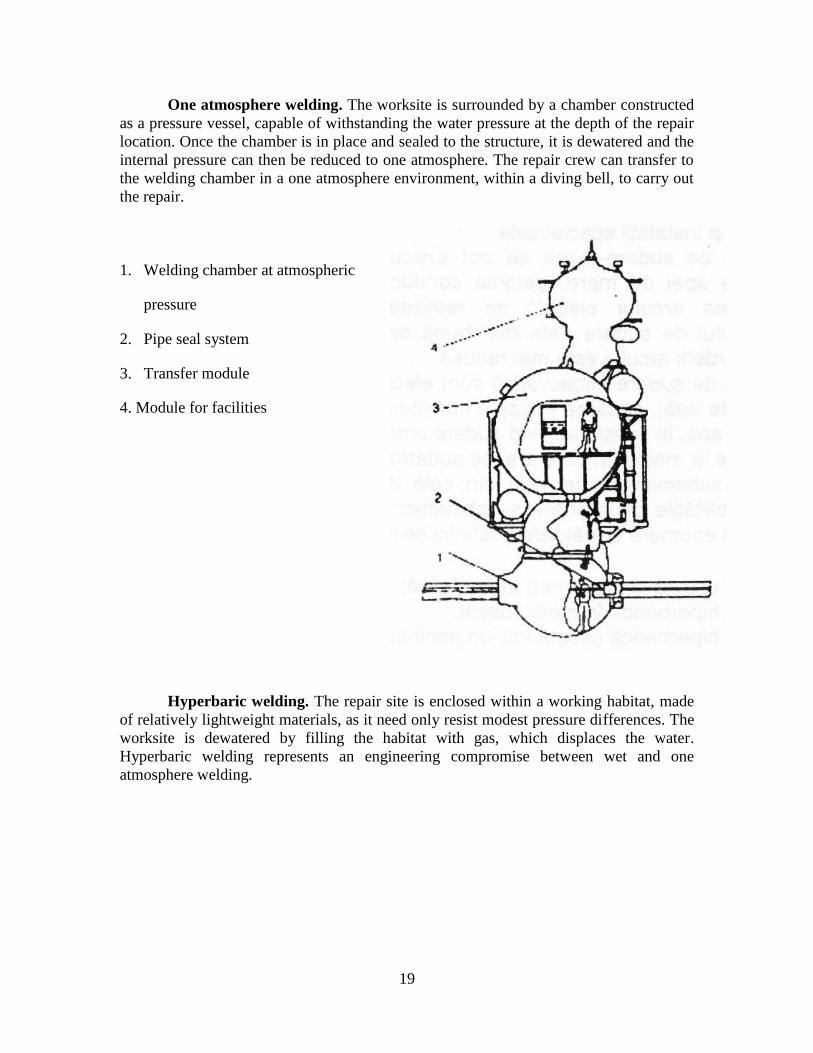
One atmosphere welding. The worksite is surrounded by a chamber constructed
as a pressure vessel, capable of withstanding the water pressure at the depth of the repair
location. Once the chamber is in place and sealed to the structure, it is dewatered and the
internal pressure can then be reduced to one atmosphere. The repair crew can transfer to
the welding chamber in a one atmosphere environment, within a diving bell, to carry out
the repair.
1. Welding chamber at atmospheric
pressure
2. Pipe seal system
3. Transfer module
4. Module for facilities
Hyperbaric welding. The repair site is enclosed within a working habitat, made
of relatively lightweight materials, as it need only resist modest pressure differences. The
worksite is dewatered by filling the habitat with gas, which displaces the water.
Hyperbaric welding represents an engineering compromise between wet and one
atmosphere welding.
20
4.4 Underwater hull cleaning
4.5 Aquaculture
• recording observed data for assessing fish health;
• mort removal and determining cause of mortality;
• net inspection and repair;
• checking net integrity (setting and mooring etc.).
4.6 Underwater archeology

21
Air lift
4.7 Underwater turbine assembling and survey
SELECT BIBLIOGRAPHY
1. Dinu D., „Hydraulics and Hydraulic Machines”, Sigma Editions, 1999.
2. Dinu D., Panzariu M., Stanca C., Vlad C. “Tehnologii subacvatice – autorizarea
activitatilor subacvatice”, Ed. Tehnica, 2000.
3. Dinu D., Vlad C.“Scafandri si vehicule subacvatice”, Ed. Stiintifica si Enciclopedica,
1986.
4. NOAA Diving Manual, Internet Edition, 2010.
5. Vlad C., Dinu D.“Interventii subacvatice”, Ed. Tehnica, 1982.

![Synthesis and characterization of molecularly imprinted ... · technologies in the synthesis of inorganic polymers and organic-inorganic hybrid materials [14]. Some research teams](https://img.dokumen.tips/doc/110x75/5ec84d7a03b6762dd54192b0/synthesis-and-characterization-of-molecularly-imprinted-technologies-in-the.jpg)



























