Embed Size (px)
Citation preview

Topology Control in Wireless Ad Hoc and Sensor Networks
PAOLO SANTI
Istituto di Informatica e Telematica
Topology Control (TC) is one of the most important techniques used in wireless ad hocand sensor networks to reduce energy consumption (which is essential to extend thenetwork operational time) and radio interference (with a positive effect on the networktraffic carrying capacity). The goal of this technique is to control the topology of thegraph representing the communication links between network nodes with the purposeof maintaining some global graph property (e.g., connectivity), while reducing energyconsumption and/or interference that are strictly related to the nodes’ transmittingrange. In this article, we state several problems related to topology control in wirelessad hoc and sensor networks, and we survey state-of-the-art solutions which have beenproposed to tackle them. We also outline several directions for further research whichwe hope will motivate researchers to undertake additional studies in this field.
Categories and Subject Descriptors: C.2.1 [Computer-Communication Networks]:Network Architecture and Design—Wireless communication
General Terms: Algorithms, Design
Additional Key Words and Phrases: Connectivity, energy consumption, topology control,sensor networks, wireless ad hoc networks
1. INTRODUCTION
The recent emergence of affordable,portable, wireless communication andcomputation devices and concomitant ad-vances in the communication infrastruc-ture have resulted in the rapid growth ofmobile wireless networks. On one hand,this has led to the exponential growthof cellular networks which are based onthe combination of wired and wirelesstechnologies. On the other hand, this hasrenewed the interest of the scientificand industrial community in the morechallenging scenario in which a groupof mobile units equipped with radio
Author’s address: Istituto di Informatica e Telematica del CNR, Area della Ricerca, Via G. Moruzzi 1, 56124Pisa, Italy; email: [email protected] to make digital or hard copies of part or all of this work for personal or classroom use is grantedwithout fee provided that copies are not made or distributed for profit or direct commercial advantage andthat copies show this notice on the first page or initial screen of a display along with the full citation.Copyrights for components of this work owned by others than ACM must be honored. Abstracting withcredit is permitted. To copy otherwise, to republish, to post on servers, to redistribute to lists, or to use anycomponent of this work in other works requires prior specific permission and/or a fee. Permissions may berequested from Publications Dept., ACM, Inc., 1515 Broadway, New York, NY 10036 USA, fax: +1 (212)869-0481, or [email protected]©2005 ACM 0360-0300/05/0600-0164 $5.00
transceivers communicate without the as-sistance of any fixed infrastructure.
Networks composed of mobile, unteth-ered units communicating with each othervia radio transceivers, typically alongmultihop paths, have been called ad hocnetworks in the literature.1 Ad hoc net-works can be used wherever a wired back-bone is infeasible and/or economically inconvenient, for example, to provide com-munications during emergencies, special
1Sometimes, ad hoc networks are called packet radionetworks which is the name used in the early papersin the field.
ACM Computing Surveys, Vol. 37, No. 2, June 2005, pp. 164–194.

Topology Control in Wireless Ad Hoc and Sensor Networks 165
Fig. 1. Example of a wireless sensor network.
events (expos, concerts, etc.), or in hostileenvironments.
Wireless sensor networks (WSNs) area special class of ad hoc networks. Ina WSN, the interconnected units arebattery-operated microsensors, each ofwhich is integrated in a single packagewith low-power signal processing, compu-tation, and a wireless transceiver. Sensornodes collect the data of interest (e.g.,temperature, pressure, soil makeup, etc.),and transmit them, possibly compressedand/or aggregated with those of neigh-boring nodes, to the other nodes. In thisway, every node in the network acquiresa global view of the monitored area thatcan be accessed by the external user con-nected to the WSN through one or moregateway nodes (see Figure 1). Potentialapplications of sensor networks abound;they can be used to monitor remote and/orhostile geographical regions, to trace ani-mals movement, to improve weather fore-cast, and so on. Examples of scenarioswhere WSN can be used are described inEstrin et al. [1999], Heinzelman et al.[1999], Khan et al. [2000], Mainwaring
et al. [2002], Pottie and Kaiser [2000],Sadler et al. [2004], Schwiebert et al.[2001], Srivastava et al. [2001], Steereet al. [2000], and Szewczyk et al. [2004].
The following aspects that have to becarefully taken into account in the de-sign stage are peculiar to wireless ad hocnetworks.
— Energy conservation. Contrary to thecase of wired networks, units in ad hocnetworks are typically equipped withlimited energy supplies. Hence, one ofthe primary goals of the design is touse this limited energy as efficientlyas possible. Energy efficiency is espe-cially important in WSNs where re-placing/refilling sensor batteries is, ingeneral, infeasible. If energy conserva-tion techniques are used at differentlevels of the wireless architecture, thefunctional lifetime of both individualunits and the network can be extendedconsiderably.
— Limited bandwidth. Typically wire-less multihop networks are character-ized by a limited bandwidth available
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

166 P. Santi
to the nodes. Although the theoreti-cal bandwidth in industrial standardssuch as IEEE 802.11 can be as highas 54Mb/sec [IEEE 1999], the situa-tion is far worse in practical situationsmainly because of the radio interfer-ence caused by simultaneous commu-nications. Thus, a major problem in thedesign of ad hoc networks is to keep thenetwork traffic carrying capacity at areasonable level even in the presenceof dense node deployments.
— Unstructured and time-varying net-work topology. Nodes in the networkmay, in principle, be arbitrarily placedin the deployment region; hence, thegraph representing the communicationlinks between the nodes is usually un-structured. Furthermore, due to nodemobility and/or failure, the networktopology may vary with time. As a con-sequence, determining the appropri-ate value of fundamental network pa-rameters (e.g., the critical transmittingrange for connectivity, see Section 5.1)is a difficult task.
— Low-quality communications. Commu-nication on wireless channels is, in gen-eral, much less reliable than in wiredchannels. Furthermore, the quality ofcommunication is strongly influencedby environmental factors which can betime-varying. Considering that ad hocnetworks, and especially WSNs, arelikely to be deployed in hostile environ-ments, low communication quality is tobe expected in general, with nonnegli-gible off-service time intervals.
In the case of WSNs, the following as-pects must also be considered.
—Operation in hostile environments. Inmany scenarios, WSNs are expected tooperate in hostile environments so sen-sors must be explicitly designed to workunder extreme conditions which maymake individual unit failure a likelyevent. Hence, resilience to sensor faultsmust be explicitly addressed at differentnetwork layers.
—Data processing. Given the energy con-straints and the expected poor commu-
nication quality, sensed data must becompressed and/or aggregated with dataof neighboring sensors before sendingthem to the gateway node(s).
—Scalability. Depending on the scenarioconsidered, WSNs might be composed ofseveral thousands of sensors. Thus, thescalability of the proposed protocols isan important issue.
Several solutions have been proposedin the literature that address at leastsome of the issues raised above. In par-ticular, great efforts have been devotedto the design of energy-efficient andmobility-resilient routing, broadcast, andmulticast protocols [Basagni et al. 1999;Gerla and Tsai 1995; Ko and Vaidya1998; Michail and Ephremides 2003;Murthy and Garcia-Luna-Aceves 1996;Papadimitriou and Georgiadis 2004;Rajaraman 2002; Seada et al. 2004].
Routing and broadcast protocols areusually concerned with energy-efficientmessage delivery on a given communica-tion graph which is considered as an in-put to the protocol. However, contrary tothe case of wired networks, the networktopology in wireless networks is not fixedand can be changed by varying the nodes’transmitting range. So, further energy canbe saved if the network topology usedto route/broadcast messages is energy-efficient itself. The goal of topology controlis to dynamically change the nodes’ trans-mitting range in order to maintain someproperty of the communication graph (e.g.,connectivity), while reducing the energyconsumed by node transceivers (which isstrictly related to the transmitting range).Since transceivers are one of the pri-mary sources of energy consumption in thewireless unit, especially in WSNs, topol-ogy control mechanisms are fundamen-tal to achieving a good network energyefficiency.
Besides reducing energy consumption,topology control has the positive effect ofreducing contention when accessing thewireless channel. In general, when thenodes’ transmitting ranges are relativelyshort, many nodes can transmit simul-taneously without interfering with each
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 167
other, and the network capacity is in-creased. Ideally, the nodes’ transmittingrange should be set to the minimum valuesuch that the graph that represents thecommunication links between units is con-nected. How to compute this value underdifferent hypotheses on the initial nodedistribution, presence, and type of mobil-ity, and so on, is the subject of this survey.
Before proceeding, some observationsregarding terminology are in order. Theterm topology control has been used withat least two different meanings in the adhoc and sensor networks literature. Forinstance, several authors consider astopology control techniques aimed at su-perimposing a hierarchy on an otherwiseflat network organization in order to re-duce, typically, energy consumption. Thisis the case, for instance, with clusteringalgorithms which select some of the nodesin the network as clusterheads whose pur-pose is to optimize energy and communica-tion efficiency in their cluster. Although, ina sense, clustering algorithms can be seenas a way of controlling the network topol-ogy, they cannot be classified as topologycontrol mechanisms according to the infor-mal definition previously presented sincethe transmit power of the nodes is usuallynot modified by a clustering algorithm.
Also, the terms power control and topol-ogy control are often confused with eachother in the current literature. In our view,we classify as power control those tech-niques that, by acting on the transmitpower level of the nodes, aim at optimizinga single wireless transmission. Althoughthis transmission might, in general, bemultihop, the focus of power control is onthe efficiency of a single (possibly multi-hop) wireless channel. Again, this featureof power control does not fulfill our infor-mal definition of topology control in whichnodes adjust their transmitting range inorder to achieve a certain network-widetarget goal (e.g., network connectivity).
The rest of this article is organized asfollows. In Section 2, we introduce a sim-plified but widely accepted model of a wire-less ad hoc network which will be usedin the rest of the article. In Section 3, wepropose a taxonomy to classify the many
approaches to the topology control prob-lem that has appeared in the literature. InSection 4, we review the probabilistic the-ories that have been used in the derivationof theoretical results concerning topologycontrol. In Section 5, we introduce severalproblems related to topology control in sta-tionary networks, and we survey state-of-the-art solutions which have been pro-posed to tackle them. In Section 6, wewill discuss how node mobility affects thepicture drawn in Section 5. Finally, inSection 7, we outline several directions forfurther research.
2. A WIRELESS AD HOC NETWORK MODEL
In this section, we introduce a simplifiedbut widely accepted model of a wireless adhoc network which will be used in the def-inition of the various problems related totopology control considered in the litera-ture.
The node configuration of ad -dimensional mobile wireless ad hocnetwork with d = 1, 2, 3, is representedby a pair Md = (N , P ), where N isthe set of nodes, with |N | = n, andP : N × T → [0, l ]d , for some l > 0, is theplacement function. The placement func-tion assigns to every element of N and toany time t ∈ T a set of coordinates in thed -dimensional cube of side l , representingthe node’s physical position at time t. Thechoice of limiting the admissible physicalplacement of nodes to a bounded regionof Rd of the form [0, l ]d , for some l > 0,is realistic and eases the treatment ofsome of the problems considered in thefollowing.
Node i ∈ N is said to be stationary ifits physical placement does not vary withtime. If all the nodes are stationary, thenetwork is said to be stationary, and func-tion P can be represented simply as P :N → [0, l ]d .
A range assignment for a d -dimensionalnode configuration Md = (N , P ) is a func-tion R A : N → (0, rmax] that assigns toevery element of N a value in (0, rmax],representing its transmitting range.Parameter rmax is called the maximumtransmitting range of the nodes in the
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

168 P. Santi
network and depends on the featuresof the radio transceivers equipping themobile nodes. A common assumptionis that all the nodes are equipped withtransceivers having the same features;hence, we have a single value of rmax forall the nodes in the network.
It is known [Rappaport 2002] that thepower pi required by node i to correctlytransmit data to node j must satisfy in-equality
pi
δαi, j
≥ β , (1)
where α ≥ 2 is the distance-power gradi-ent, β ≥ 1 is the transmission quality pa-rameter, and δi, j is the Euclidean distancebetween the nodes. While the value of βis usually set to 1, the value of α dependson environmental conditions. In the idealcase, we have α = 2; however, α is typi-cally 4 in realistic situations. A value of αin the interval [2, 6] is commonly accepted.Given the previous formula, we can definethe energy cost of a range assignment RAas c(RA) = ∑
i∈N (RA(i))α.Formula (1) holds for free-space envi-
ronments with nonobstructed line of sight,and it does not consider the possible occur-rence of reflections, scattering, and diffrac-tion caused by buildings, terrain, and soon. Although more complicated formulasof the radio signal attenuation with dis-tance are known, such as that recently de-rived in Bruck et al. [2002], Inequality (1)is widely accepted in the ad hoc networkcommunity.
Note that Inequality (1) accounts foronly the power consumed by the sendernode (transmit power). In practice, ina radio communication, a nonnegligibleamount of energy is also consumed atthe receiver node to receive and decodethe transmitted signal. Most current lit-erature does not account for the receiverenergy, and the design of topology controlprotocols based on more realistic energymodels is one of the main open issues inthe field (see Section 7).
Given a node configuration Md = (N , P )and a range assignment RA, the commu-nication graph induced by RA on Md attime t is defined as the directed graph
Gt = (N , E(t)), where the directed edge[i, j ] exists if and only if RA(i)≥δP (i,t), P ( j ,t).In other words, the directed edge [i, j ] ex-ists if and only if nodes i and j are ata distance of at most RA(i) at time t. Inthis case, node j is said to be a neigh-bor of i. A range assignment RA is saidto be connecting at time t if the resultingcommunication graph at time t is stronglyconnected.2 If the network is stationary,we simply say that the range assignmentRA is connecting. A range assignment inwhich all the nodes have the same trans-mitting range r, for some 0 < r ≤ rmax, iscalled r-homogeneous range assignment.3Observe that the communication graphgenerated by a homogeneous range as-signment can be considered as undirectedsince [i, j ] ∈ E(t) ⇔ [ j , i] ∈ E(t).
In general, the range assignment mayvary with time in order to ensure tar-get properties (e.g., strong connectivity, agiven network diameter h<n) of the com-munication graph. Hence, a sequence ofrange assignments RAt1 , RAt2 , . . . can bedefined, where RAti is the range assign-ment at time ti, and the transition betweenrange assignments is determined by thetopology control mechanism.
The communication graph as definedhere is essentially the point graph modelintroduced in Sen and Huson [1996], butit is more often called the unit disk graphmodel in the topology control (TC) litera-ture. If node positions are chosen accord-ing to some probability distribution, thepoint graph model coincides with the con-cept of Random Geometric Graph (RGG)which is a generalization of the notion ofRandom Graph introduced in the appliedprobability community (see Section 4 fordetails).
The main weakness of the point graphmodel is the assumption that the radiocoverage area is a perfect circle. This as-sumption is quite realistic in open-air flat
2A directed graph G = (N , E) is strongly connectedif and only if, for any two nodes u, v ∈ N , there existsa directed path from u to v in G.3When the value of r is not relevant, the r-homogeneous range assignment is simply called thehomogeneous range assignment.
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 169
Fig. 2. A taxonomy of topology control techniques.
environments, but it is critical in indoor orurban scenarios where the presence of ob-jects, walls, buildings, and so on, rendersthe radio coverage area extremely irreg-ular. Further, the area and shape of theradio coverage is influenced by weatherconditions and by the interference withpreexisting infrastructure (e.g., powerlines, base stations, etc.) Including allthese details in the network modelwould make it extremely complicatedand scenario-dependent, hampering thederivation of meaningful and sufficientlygeneral analytical results. For this reason,the point graph model described earlier,although quite simplistic, is widely usedin the analysis of ad hoc networks.
3. A TAXONOMY OF TOPOLOGY CONTROL
In this section, we try to organize into a co-herent taxonomy the various approachesto the topology control problem as it hasappeared in the literature.
Our taxonomy is depicted in Figure 2.The first distinction is between homoge-neous and nonhomogeneous approaches.In the former case, which is the simpler(and easier to analyze) type of TC, nodesare assumed to use the same transmit-ting range, and the topology control prob-lem reduces to the one of determining theminimum value of r such that a certainnetwork-wide property is satisfied (theCritical Transmitting Range). In the lat-ter case, nodes are allowed to choose dif-ferent transmitting ranges (provided theydo not exceed the maximum range).
Nonhomogeneous topology control isclassified into three categories, depend-
ing on the type of information that isused to compute the topology. In location-based approaches, exact node positions areknown. This information is either used bya centralized authority to compute a set oftransmitting range assignments which op-timizes a certain measure (this is the caseof the Range Assignment problem andits variants), or it is exchanged betweennodes and used to compute an “almost op-timal” topology in a fully distributed man-ner (this is the case for protocols usedfor building energy-efficient topologies forunicast or broadcast communication). Indirection-based approaches, it is assumedthat nodes do not know their position,but they can estimate the relative direc-tion of each of their neighbors. Finally,in neighbor-based techniques, nodes areassumed to know only the ID of the neigh-bors and are able to order them accord-ing to some criterion (e.g., distance, or linkquality).
Besides classifying topology control ap-proaches based on the constraints we puton the range assignment (homogeneousor nonhomogeneous), and on the type ofinformation which is available to the net-work nodes, we can also distinguish thevarious approaches proposed in the lit-erature based on the properties of thenetwork topology resulting from the ap-plication of topology control techniques.
Most of the approaches presented inthe literature are concerned with buildingand maintaining a connected networktopology as network partitioning is highlyundesirable. More recently, some authorshave considered the problem of building ak-connected network topology (withk > 1), that is, a topology in which thereexists at least k distinct paths betweenany two network nodes. Guaranteeingk-connectivity of the communicationgraph is fundamental in all those ap-plications in which a certain degree offault-tolerance is needed: since there existat least k paths between any two networknodes, network connectivity is guaran-teed in the presence of up to k − 1 nodefailures. Other authors have recently alsoconsidered the topology control problemin a context (typical of wireless sensor
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

170 P. Santi
networks) in which nodes alternate be-tween active and sleeping times, and thegoal is to build a network topology suchthat the subnetwork composed of theactive nodes is connected at any time (seeSection 5.1.4).
4. PROBABILISTIC TOOLS
Some of the analytical results presentedin this article are based on a probabilisticapproach. In this Section, we survey theprobabilistic theories that have been usedto derive them.
The main difficulty that arises in theprobabilistic analysis of wireless ad hocnetworks is that the well-established the-ory of random graphs [Bollobas 1985;Palmer 1985] cannot be used. In fact, afundamental assumption in this model isthat the probabilities of edge occurrencein the graph are independent which is notthe case in wireless ad hoc networks. Asan example, consider three nodes i, j , ksuch that δi, j <δi,k . With common wirelesstechnologies that use omni-directional an-tennas, and disregarding the effect ofshadowing and fading on radio signalpropagation, if i has a link to k, then it alsohas a link to j . Hence, the occurrences ofedges (i, j ) and (i, k) are correlated.
In order to circumvent this problem,Chlamtac and Farago [1999] introducedthe Random Network (RN) model as a gen-eralization of the uniform random graphmodel in which graphs are selected ac-cording to a more general probability dis-tribution. We recall that in the uniformrandom graph model, each element of agiven class of graphs with n vertices isassigned an equal probability of being cho-sen. Examples of uniform models are ran-dom graphs with a given number m, with0≤m≤(n
2
), of edges, random trees, random
k-regular graphs, and so on. In the RNmodel, graphs can be chosen according toan arbitrary nondegenerate distribution,where a nondegenerate distribution is adistribution that does not concentrate (ina probabilistic sense) on a class of graphsof relatively small size. Based on the RNmodel and using the theory of Kolmogorovcomplexity, Chlamtac and Farago [1999]
analyzed the performance of a randomizeddistributed algorithm aimed at connectingclusterheads in a Virtual Cellular Archi-tecture. The authors claim that the RNmodel, relying on an arbitrary nondegen-erate probability distribution, can accountfor correlations between edges which werenot allowed in the uniform model. Un-fortunately, the actual probability distri-bution of the graphs describing ad hocnetworks might be degenerate. In fact, theactual distribution is the uniform distribu-tion over the class of point graphs which isdegenerate if the size of the class of pointgraphs is relatively small compared to theclass of all possible graphs. Since the classof point graphs has not yet been character-ized, its size is unknown and determiningwhether this distribution is degenerate ornot is still an open problem.
A more recent theory which is still in de-velopment is the theory of geometric ran-dom graphs (GRG). In the theory of GRG,a set of n points is distributed according tosome density in a d -dimensional region R,and some property of the resulting nodeplacement is investigated. For example,the longest nearest-neighbor link [Penrose1999a], the longest edge of the EuclideanMinimum Spanning Tree (MST) [Penrose1999c; Penrose 1997], and the total cost ofthe MST have been investigated [Aldousand Steele 1992; Steele 1988; Yukich2000]. For a survey of GRG, the readeris referred to Diaz et al. [2000]. Re-cently, several papers [Bettstetter 2002b;Blough et al. 2002; Panchapakesan andManjunath 2001; Santi 2005; Wan andYi 2004; Yi et al. 2003; Yi and Wan 2005]have used the theory of GRG to ana-lyze fundamental properties (typically,connectivity) of wireless ad hoc networks.
Two others theories have been used inthe probabilistic analysis of ad hoc net-works: the theory of continuum percola-tion and the occupancy theory.
In the theory of continuum percolation[Meester and Roy 1996], nodes are as-sumed to be distributed with Poisson den-sity λ in R
2, and two nodes are connectedto each other if the distance between themis at most r. It has been proven that,for each λ > 0, there exists at most one
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 171
infinite-order component with high prob-ability. However, the existence of aninfinite-order component is not sufficientto ensure the connectivity of the network.In fact, there could exist (infinitely many)nodes which do not belong to the giantcomponent, thus leading to a disconnectedcommunication graph. Hence, the qualityof connectivity is related to the fraction θof nodes belonging to the giant component[Janson et al. 1993] which, in turn, dependon the percolation probability. The perco-lation probability is the probability thatan arbitrary node belongs to a connectedcomponent of infinite order. The main re-sult of the theory of continuum percola-tion is that there exists a finite, positivevalue λc of λ, called critical density underwhich the percolation probability is zeroand above which it is nonzero. However,no explicit expression of the percolationprobability is known to date. The theoryof continuum percolation have been usedin Dousse et al. [2002], and Gupta andKumar [1998] to analyze the connectivityof ad hoc networks.
In the occupancy theory [Kolchin et al.1978], it is assumed that n balls arethrown independently, at random, into Ccells. The allocation of balls into cells canbe characterized by means of random vari-ables describing some property of the cells.The occupancy theory is aimed at deter-mining the probability distribution of suchvariables as n and C grow to infinity (i.e.,the limit distribution). The most studiedrandom variable is the number of emptycells after all the balls have been thrown,which we denote µ(n, C). Of course, thelimit distribution of µ(n, C) depends on therelative magnitude of n and C, that is, onthe asymptotic behavior of ρ = n/C. De-pending on the asymptotic behavior of ρ,five domains such that n, C → ∞ for whichthe limit distribution of ρ(n, C) is differ-ent have been determined. Depending onthe domain, the limit distribution can beeither Poisson or Normal with differentparameters. The occupancy theory can beused to analyze connectivity in ad hocnetworks by subdividing the deploymentregion R into equal subregions (cells) ofsize ≈ rd and by determining under which
conditions all the cells are filled with atleast one node (ball). This technique hasbeen used in Santi and Blough [2003,2002].
5. STATIONARY NETWORKS
In this Section, we will consider severalproblems related to topology control in sta-tionary ad hoc networks. The generaliza-tion of some of these problems to the morecomplicated scenario of mobile networksis presented in Section 6.
5.1. Homogeneous Topology Control
First, we consider the following prob-lem concerning homogeneous rangeassignments:
Definition 5.1 CTR (Critical Transmit-ting Range). Suppose n nodes are placedin R = [0, l ]d , with d = 1, 2, 3. What isthe minimum value of r such that the r-homogeneous range assignment for thisplacement is connecting?
The minimum value of r such that ther-homogeneous range assignment is con-necting is known as the critical trans-mitting range for connectivity in theliterature.
The motivation for studying CTR stemsfrom the fact that, in many situationsthe dynamically-adjusting node transmit-ting range is not feasible. In fact, in-expensive radio transceivers might notallow the transmission range to be ad-justed [Ramanathan and Rosales-Hain2000]. In this scenario, setting the sametransmitting range r for all the unitsis a reasonable choice, and the only op-tion to reduce power consumption andincrease network capacity is to set r tothe minimum possible value that ensuresconnectivity.
Characterizing the critical transmittingrange helps the system designer to an-swer fundamental questions such as givena number of nodes n to be deployed in aregion R, what is the minimum value ofthe transmitting range that ensures net-work connectivity? Conversely, for a giventransmitter technology, how many nodes
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

172 P. Santi
Fig. 3. The CTR for connectivity is thelength of the longest edge of the EuclideanMST (edge e).
must be distributed over a given region toensure network connectivity?
The solution to CTR depends on theinformation we have about the physicalplacement of nodes. If the node placementis known in advance, the critical trans-mitting range is the length of the longestedge of the Euclidean MST [Penrose 1997;Sanchez et al. 1999] built on the nodes(see Figure 3). Unfortunately, in manyrealistic scenarios of ad hoc or sensor net-works, the node placement is not known inadvance. For example, in WSNs, sensorscould be spread from a moving vehicle(airplane, ship, or spacecraft). If node po-sitions are not known, the minimum valueof r ensuring connectivity in all possiblecases is r ≈ l
√d , which accounts for the
fact that nodes could be concentrated atopposite corners of the deployment region.However, this scenario is unlikely in mostrealistic situations. For this reason, CTR
has been studied under the assumptionthat nodes are distributed in R accord-ing to some probability distribution. Inthis case, the goal is to characterizethe minimum value of r which providesconnectivity with high probability that is,with a probability that converges to 1 asthe number of nodes (or the side l of thedeployment region) increases.
5.1.1. Dense Networks. The probabilistictheory that is most suited to the anal-ysis of CTR is the theory of geometricrandom graphs (see Section 4). Sincethe critical transmitting range coincideswith the length of the longest edge inthe Euclidean MST, probabilistic solutionsto CTR can be derived by using resultsconcerning the asymptotic distribution ofthe longest MST edge Penrose [1999c,1997]. This approach has been used inPanchapakesan and Manjunath [2001]to prove that, under the hypothesis thatnodes are uniformly distributed in [0, 1]2,the critical transmitting range for connec-tivity with high probability is r = c
√log n
nfor some constant c > 0. The charac-terizations of the critical range for con-nectivity in one- and three-dimensionalnetworks can be obtained by combiningsome results derived in Dette and Henze[1989], Holst [1980], and Penrose [1999c,1997, 1999a] and are as follows. In one-dimensional networks, it is shown thatif n nodes are distributed uniformly atrandom in [0, 1], then the critical rangefor connectivity with high probability isr = log n
n . In three-dimensional networks,it is shown that if n nodes are distributeduniformly at random in [0, 1]3, then thecritical range for connectivity with highprobability is
r = 3
√log n − log log n
nπ+ 3
2· 1.41 + g (n)
πn,
where g (n) is an arbitrary function suchthat limn→∞ g (n) = +∞.
A notable result of the theory of GRG isthat, under the assumption of uniformlydistributed points and d ≥ 2, the longestnearest-neighbor link and the longestMST edge have the same value (asymp-totically, as n → ∞) [Penrose 1999c].In terms of the resulting communicationgraph, this means that connectivity oc-curs (asymptotically) when the last iso-lated node disappears from the graph.This result reveals an interesting analogywith non-geometric random graphs whichdisplay the same behavior (known as thegiant component phenomenon).
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 173
Although interesting, the theory of GRGcan be used only to derive results con-cerning dense ad hoc networks. In fact,a standard assumption in this theory isthat the deployment region R is fixed, andthe asymptotic behavior of r as n grows toinfinity is investigated, that is, the nodedensity is assumed to grow to infinity. Asimilar limitation applies to the model ofGupta and Kumar [1998]. In their case, Ris the disk of unit area, and the authorsshow that if the units’ transmitting rangeis set to r =
√log n+c(n)
πn , then the resultingnetwork is connected with high probabil-ity if and only if c(n) → ∞. This result isobtained making use of the theory ofcontinuum percolation Meester and Roy[1996] which is also used in Dousse et al.[2002] to investigate the connectivity ofhybrid ad hoc networks in which base sta-tions can be used to improve connectivity.
5.1.2. Sparse Networks. Given the pre-ceding discussion, the applicability of the-oretical results concerning connectivityin ad hoc networks to realistic scenarioscould be impaired. In fact, it is knownthat real wireless networks cannot be toodense, due to the problem of spatial reuse:when a node is transmitting, it interfereswith all the nodes within its interferencerange which is typically larger than thetransmitting range. If the node density isvery high, the level of interference is veryhigh as well, and the overall network ca-pacity is compromised [Gupta and Kumar2000].
In order to circumvent this problem,other authors have characterized the criti-cal transmitting range in the more generalmodel in which the side l of the deploy-ment region is a further parameter, andn and r can be arbitrary functions of l . Inthis case, the critical transmitting range isanalyzed asymptotically as l → ∞. Notethat, using this model, the node densitymight either converge to 0 or to a con-stant c > 0, or diverge as the size of thedeployment region grows to infinity. Thus,results based on this framework can beapplied to dense as well as sparse ad hocnetworks.
The critical transmitting range forconnectivity in sparse ad hoc networkshave been analyzed in Santi et al. [2001]and Santi and Blough [2003, 2002] usingthe occupancy theory. It has been proventhat, under the assumption that n nodesare distributed uniformly at random inR = [0, l ]d , the r-homogeneous rangeassignment is connecting with high prob-ability if r = l d
√c log l
n for some constantc > 0. The authors also prove that, ifr ∈ O(l d
√1n ), then the r-homogeneous
range assignment is not connected withhigh probability.
5.1.3. More Practical Characterizations ofthe CTR. Besides analytical characteriza-tion, the critical transmitting range hasbeen investigated from a more practi-cal viewpoint. In Narayanaswamy et al.[2002], the authors present a distributedprotocol, called COMPOW, that attemptsto determine the minimum common trans-mitting range needed to ensure networkconnectivity. They show that setting thetransmitting range to this value hasthe beneficial effects of maximizing net-work capacity, reducing the contention toaccess the wireless channel, and mini-mizing energy consumption. Bettstetter[2002a] analyzes network connectivity un-der the assumption that some of the nodeshave transmitting range r1, and the re-maining ones have transmitting ranger2 = r1. Santi and Blough [2003] in-vestigate through simulation the trade-off between the transmitting range andthe size of the largest connected compo-nent in the communication graph. Theexperimental results presented in Santiand Blough [2003] show that, in sparsetwo and three-dimensional networks, thetransmitting range can be reduced signif-icantly if weaker requirements on connec-tivity are acceptable: halving the criticaltransmitting range, the largest connectedcomponent has an average size of ap-proximately 0.9n. This means that a con-siderable amount of energy is spent toconnect relatively few nodes. This be-havior is not displayed in the case of
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

174 P. Santi
one-dimensional networks in which asmall decrease of the transmitting rangewith respect to the critical value split thenetwork into at least two connected com-ponents of moderate size. Quite interest-ingly, the experimental analysis of Santiand Blough [2003] is coherent with thetheoretical result of the theory of GRG(which, we recall, can be applied only todense ad hoc networks) concerning thegiant component phenomenon occurringin two and three-dimensional networks.This seems to indicate that, in the case ofsparse ad hoc networks, connectivity alsooccurs (asymptotically) when the last iso-lated node disappears from the communi-cation graph.
5.1.4. Other Characterizations of the CriticalRange. The critical transmitting rangefor connectivity has also been studied un-der the assumption of nonuniform nodedistribution. In particular, Penrose [1998]has characterized the critical range whennodes are distributed according to thetwo-dimensional Normal distribution, andto arbitrary probability density functions[Penrose 1999b] (provided certain techni-cal conditions are satisfied).
Other authors have considered the crit-ical transmitting range for k-connectivityof the communication graph,4 that is, thecritical range for ensuring a certain degreeof fault-tolerance in the network. By ex-ploiting a result due to Penrose [1999a],showing that when the minimum node de-gree in a GRG becomes k, the graph be-comes k-connected with high probability.(this result holds only for two- and three-dimensional networks), Wan and Yi [2004]have derived the following characteriza-tion of the critical range for k-connectivityin two-dimensional networks with uni-formly distributed points
r =√
log n + (2k − 3) log log n + f (n)πn
,
where k > 1 is an arbitrary constant,and f (n) is a function such that
4We recall that a graph is k-connected if removingany k − 1 nodes does not disconnect the graph.
limn→∞ f (n) = +∞. The problem ofensuring k-connectivity in ad hoc net-works has been studied also in Bettstetter[2002b].
Another model considers the problemof ensuring connectivity in networks withBernoulli nodes. In this model, it is as-sumed that, at any instant of time, anynode in the network is active with a cer-tain constant probability p > 0. Sincenode activation periods are independentevents, the node active/inactive status canbe modeled by a Bernoulli random vari-able of parameter p. The study of ad hocnetworks with Bernoulli nodes finds itsmotivation in the fact that, in many ap-plication scenarios (especially for WSNs),nodes alternately shut down their radio tosave energy. In this context, it is impor-tant that the subnetwork composed of ac-tive nodes is connected (active connectiv-ity). Furthermore, it is desirable that anyinactive node is adjacent to at least one ac-tive node (active domination) so that it canquickly propagate alarm messages in casean anomalous condition is detected (we re-call that inactive nodes still sense the envi-ronment – it is only the radio that is turnedoff). Denoting with G(n, r) the GRG graphwith n nodes and transmitting range r,with A(n, r, p) the subgraph of G(n, r) in-duced by the set of active nodes, and withI (n, r, p) the subgraph of G(n, r) obtainedby removing all edges whose endpoints areboth inactive nodes, active connectivityis obtained when A(n, r, p) is connected,and active domination when I (n, r, p) isconnected. By combining the results pre-sented in Yi et al. [2003] and in Yi andWan [2005], it can be shown that with highprobability the critical range for connec-tivity in A(n, r, p) and in I (n, r, p) underthe assumption of uniformly distributednodes is the same, and it equals
r =√
log n + f (n)πpn
,
where f (n) is a function such thatlimn→∞ f (n) = +∞.
Another problem considered is the char-acterization of the critical coverage range.
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 175
Network coverage is defined as follows: ev-ery node covers a circular area of radius rc,and the monitored area R is covered if ev-ery point of R is at a distance of at mostrc from at least one node. The goal is tofind the critical value of rc that ensurescoverage with high probability. This prob-lem has been investigated in Philips et al.[1989] for the case of nodes distributed ina square with a side of length l accordingto a Poisson process of fixed density. Thecritical transmitting and coverage rangefor Poisson distributed points on a line oflength l is derived in Piret [1991].
5.2. Nonhomogeneous Topology Control
In the previous Section, we have analyzedthe problem of determining a minimumcommon value of the transmitting rangethat generates a connected communica-tion graph under the hypothesis that onlyprobabilistic information about node po-sitions is available. In this Section, wesurvey the considerable body of results ob-tained for the more general problem inwhich nodes are allowed to have differ-ent transmitting ranges. As in the caseof homogeneous topology control, in thisSection, we only report results concern-ing the stationary case. Nonhomogeneoustopology control techniques for mobile net-works will be discussed in Section 6.
5.2.1. The Range Assignment Problem.The problem of assigning a transmit-ting range to nodes in such a way thatthe resulting communication graph isstrongly connected and the energy cost isminimum is called the range assignmentproblem (RA), and it was first studied inKirousis et al. [2000]. More formally, theproblem is defined as follows.
Definition 5.2 RA. Let N ={u1, . . . , un}be a set of points in the d -dimensionalspace (d = 1, 2, 3), denoting the positionsof the network nodes. Determine a con-necting range assignment RA such thatc(RA) = ∑
ui∈N (RA(ui))α is minimum.
The computational complexity of RA hasbeen analyzed in Kirousis et al. [2000].The problem is solvable in polynomial
time (more specifically, in time O(n4)) inthe one-dimensional case (i.e., nodes in aline), while it is shown to be NP-hard inthe case of three-dimensional networks. Ina later paper, Clementi et al. [1999] haveshown that RA is NP-hard also in the two-dimensional case. Thus, computing theoptimal range assignment in two andthree-dimensional networks is a virtuallyimpossible task. However, the optimal so-lution can be approximated within a factorof 2 using the range assignment generatedas follows [Kirousis et al. 2000]. Let T bethe MST built on N , where the weight ofedge (ui, u j ) is the power δα
ui ,u jneeded to
transmit a message between ui and u j ; forevery node ui ∈ N , define RA(ui) as themaximum of distances δui ,u j , for all nodesu j which are neighbors of ui in T . In thefollowing, we will denote this range as-signment with RAMST.
Several variants of RA have been consid-ered in the literature. In Clementi et al.[1999, 2000a, 2000b] and Kirousis et al.[2000], the focus is on a constrained ver-sion of RA in which the additional require-ment of having a communication graphwith diameter at most h, for some constanth < n, is imposed on the communicationgraph. However, we believe this versionof the problem is less interesting from apractical point of view. In fact, imposinga topology which is too connected wouldoften cause communication interferenceto occur even between nodes that are farapart, thus decreasing the network capac-ity. This phenomenon is confirmed by the-oretical as well as experimental results[Grossglauser and Tse 2001; Gupta andKumar 2000; Li et al. 2001] which showthat the communication graph in wirelessad hoc networks should be as sparse aspossible, while preserving connectivity.
Two important variants of RA whichhave been recently studied are basedon the concept of symmetry of thecommunication graph. In general, thecommunication graph generated by arange assignment is not symmetric,that is, it might contain unidirectionallinks. Although implementing wirelessunidirectional links is technically feasible(see Bao and Garcia-Luna-Aceves [2001],
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

176 P. Santi
Kim et al. [2001], Pearlman et al. [2000],Prakash [2001], and Ramasubrama-nian et al. [2002] for unidirectional linksupport at different layers), the actualadvantage of using unidirectional linksis questionable. For example, in Marinaand Das [2002] the authors have shownthat the high overhead needed to handleunidirectional links in routing protocolsoutweighs the benefits that they canprovide, and better performance can beachieved by simply avoiding them. Thehigh overhead is due to the fact thatlow-level protocols, such as the MAC(Medium Access Control) protocol, arenaturally designed to work under thesymmetric assumption. For instance, theMAC protocol defined in the IEEE 802.11standard [IEEE 1999] is based on RTS- CTS message exchange: when node uiwishes to send a message to one of itsneighbors u j (at this level, communicationis only between immediate neighbors),it sends a RTS (Request To Send) to u j ,and waits for a CTS (Clear To Send)message from u j . If the CTS message isnot received within a certain time, thenmessage transmission is aborted, and it istried again after a backoff interval. Hence,for the protocol to work, ui must be withinthe transmitting range of u j , that is, therange assignment must be symmetric.
The symmetric range assignment prob-lem have been independently definedand studied in Blough et al. [2002] andCalinescu et al. [2002]. In Blough et al.[2002], two different symmetric restric-tions of RA are considered.
Definition 5.3 Symmetric Subgraph.Let G = (N , E) be an arbitrary commu-nication graph. The symmetric subgraphof G, denoted GS , is obtained from G bydeleting all the unidirectional links, thatis, all the edges such that (u, v) ∈ E, but(v, u) /∈ E.
Definition 5.4 WSRA. Let N = {u1, . . . ,un} be a set of points in the d -dimensionalspace (d = 1, 2, 3), denoting the positionsof the network nodes. Determine a con-necting range assignment RA such thatthe symmetric subgraph GS of the com-munication graph resulting from RA is
connected, and c(RA) = ∑ui∈N (RA(ui))α is
minimum.
Definition 5.5 SRA. Let N = {u1, . . . ,un} be a set of points in the d -dimensionalspace (d = 1, 2, 3), denoting the positionsof the network nodes. A range assignmentRA is said to be symmetric if it generatesa communication graph which containsonly bidirectional links, that is, RA(ui) ≥δui ,u j ⇔ RA(u j ) ≥ δui ,u j . Determine aconnecting symmetric range assignmentRA such that c(RA) = ∑
ui∈N (RA(ui))α isminimum.
In SRA (Symmetric Range Assignment),it is required that the communicationgraph contains only bidirectional links.This requirement is weakened in WSRA
(Weakly Symmetric Range Assignment) inwhich unidirectional links may exist, butthey are not essential for connectivity. Themotivation for studying WSRA stems fromthe observation that what is really impor-tant in the design of ad hoc networks is theexistence of a connected backbone of sym-metric edges. In other words, there couldexist further edges for which symmetryis not guaranteed, but these links can beignored without compromising networkconnectivity.
In Blough et al. [2002], it is shownthat SRA remains NP-hard in two andthree-dimensional networks. Hence, im-posing (weak) symmetry does not reducethe computational complexity of the prob-lem. The authors of Blough et al. [2002]have also investigated the relations be-tween the energy cost of the optimal so-lutions of RA, WSRA, and SRA. Denotingthese costs with cRA, cWS, and cS , respec-tively, we have cWS − cRA ∈ O(1), andcS −cRA ∈ �(n). In other words, this meansthat the requirement for weak symme-try has only a marginal effect on the en-ergy cost of the range assignment, whileit eases significantly the integration oftopology control mechanisms with exist-ing higher-level protocols (e.g., routing).On the other hand, imposing the strongerrequirement of symmetry incurs a consid-erable additional energy cost. Overall, wecan conclude that weak symmetry is a de-sirable property of the range assignment.
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 177
Calinescu et al. [2002] introduce twopolynomial approximation algorithms forWSRA which improve on the approxima-tion ratio of 2, previously known.5 The firstalgorithm has an approximation ratio of1 + ln 2≈1.69, while the second, which ismore computationally efficient, has an ap-proximation ratio of 15
8 . These ratios havebeen recently have been recently improvedfor any positive constant ε to 5
3 + ε, and to116 , respectively [Althaus et al. 2003]. Fur-
ther, the authors of Althaus et al. [2003]present an exact branch and cut algorithmfor solving WSRA based on a new integerlinear program formulation of the prob-lem. Experimental results show that thebranch and cut algorithm solves instanceswith up to 35-40 nodes (with randomlygenerated positions) in 1 hour. Most im-portantly, the experimental results showthat the average improvement of the ex-act solution over RAMST, which can be eas-ily calculated, is in the range 4–6%. Thismeans that the average case approxima-tion ratio of RAMST is much smaller thanthe worst case ratio of 2.
The problem of ensuring k-connectivity(i.e., fault-tolerance) of the communicationgraph has also been considered in the lit-erature. It was first studied in Loyd et al.[2002] in the weakly symmetric versionwhen k = 2, and further analyzed inCalinescu and Wan [2003]. In particular,Calinescu and Wan prove that the weaklysymmetric version of the problem, withk = 2 is NP-hard, and they provideapproximation algorithms for both theweakly symmetric and asymmetric ver-sion of the problem.
5.2.2. Minimum Energy Unicast andBroadcast
5.2.2.1. Unicast. In the previous Section,the emphasis was on finding a rangeassignment that generates a connectedtopology of minimum energy cost. An-other branch of research focused on com-
5It can be easily observed that the RAMST range as-signment used in Kirousis et al. [2000] to approx-imate RA within a factor of 2 is weakly symmet-ric. This observation has been used in Blough et al.[2002] to prove that cWS − cRA ∈ O(1).
puting topologies which have energy-efficient paths between potential source-destination pairs. More specifically, thefollowing problem has been considered(see Li et al. [2002] and Rajaraman[2002]).
Let G be the communication graph ob-tained when all the nodes transmit atmaximum power (the maxpower graph),and assume G is connected. Every edge(ui, u j ) in G is weighted with the powerδα
ui ,u jneeded to transmit a message be-
tween ui and u j . Given any path P =u1, u2, . . . , uk in G, the power cost of Pis defined as the sum of the power costsof the single edges, that is, pc(P ) =∑k−1
i=1 δαui ,ui+1
. Let pcG(u, v) denote the min-imum of pc(P ) over all paths P thatconnect nodes u and v in G. A path inG connecting u and v and consumingthe minimum power pcG(u, v) is called aminimum-power path between u and v.Let G ′ be an arbitrary subgraph of G. Thepower stretch factor of G ′ with respect toG is the maximum over all possible nodepairs of the ratio between the cost of theminimum-power path in G ′ and in G. For-mally, ρG ′ =maxu,v∈N
pcG′ (u,v)pcG (u,v) .
The power stretch factor is a generaliza-tion of the concept of distance stretch factorwhich is well known in computational ge-ometry. Another similar concept is the hopstretch factor, which measures the ratio ofthe hopcounts rather than that of poweror distance.
In general, we would like to identify asubgraph G ′ (also called a routing graphin the following) of the maxpower graph Gwhich has a low-power stretch factor andwhich is sparser than the original graph.The routing graph can be used to computeroutes between nodes with the guaran-tee that the power needed to communicatealong these routes is almost minimal. Theadvantage of using G ′ instead of G is thatcomputing the optimal routes in G ′ is eas-ier than in G and generates little messageoverhead, and that a sparse communica-tion graph requires little maintenance inthe presence of node mobility.
Given the maxpower graph G, the prob-lem of computing a subgraph G ′ with
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

178 P. Santi
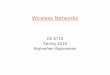
Fig. 4. Edges in the relative neighborhood graph (left) and in the gabriel graph (right).
low-power stretch factor has been widelystudied in the literature. Ideally, therouting graph should have the followingfeatures:
(a) constant power stretch factor, that is,ρG ′ ∈ O(1). Using the terminology ofgeometric graphs, G ′ should be a powerspanner of G;
(b) linear number of edges, in other words,G ′ should be sparse;
(c) bounded node degree, and(d) easily computable in a distributed
and localized fashion. By localized, wemean that every node should be able tocompute the set of its neighbors in G ′using only information provided by itsneighbor nodes in G.
Property (a) ensures that the routes cal-culated on G ′ are at most a constant fac-tor away from the energy-optimal routes.Property (b) eases the task of findingroutes in G ′ and of maintaining the rout-ing graph in the presence of node mobil-ity, and it reduces the routing overhead.The requirement of bounded node degreeis motivated by the fact that nodes with ahigh degree are likely to be bottlenecks inthe communication graph. Finally, prop-erty (d) is fundamental for a fast andeffective computation of the routing graphin a real wireless ad hoc network.
Several routing graphs that satisfysome of the previous requirements havebeen proposed in the literature. Most ofthem are based on subgraphs of G whichhave been shown to be good distance span-ners. In fact, it can be easily seen that,if a subgraph G ′ is a distance spanner ofgraph G, then it is also a power spannerof G (note that the reverse implication, ingeneral, is not true). Thus, the consider-able body of research devoted to distancespanners in computational geometry canbe used to design good routing graphs.
The following geometric graphs havebeen considered in the literature.
Definition 5.6 Let N be a set of pointsin the Euclidean two-dimensional space.
The Relative Neighborhood Graph(RNG) of N has an edge between twonodes ui and u j if there is no node uksuch that max{δui ,uk , δu j ,uk } ≤ δui ,u j (seeFigure 4(a)).
The Gabriel Graph (GG) of N has anedge between two nodes ui and u j if thereis no node uk such that δ2
ui ,uk+δ2
u j ,uk≤δ2
ui ,u j;
in other words, (ui, u j )∈GG(N ) if and onlyif the disk obtained using uiu j as its diam-eter does not contain any node from N (seeFigure 4(b)).
The Delaunay Graph (DG) of N isthe unique triangulation such that the
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 179
circumcircle of every triangle contains nopoints of N in its interior;
The Yao Graph (YG) of N of parameter cfor any integer c≥6 is denoted YGc, and isdefined as follows. At each node ui ∈ N ,any c equally separated rays originatedat ui define c equal cones. In each cone,choose the shortest directed edge (ui, u j ) ∈G, if any, and add the correspondent di-rected edge in YGc. If we add the reversedirected link from u j to ui, we obtain theReverse Yao Graph. If we ignore the direc-tion of edges, we have the Undirected YaoGraph.
Note that, in general, the DG of a setof points may include edges much longerthan the maximum node transmittingrange. For this reason, a restricted versionof DG has been introduced in Gao et al.[2001] in which a limit on the maximumedge length is imposed. We denote the re-stricted DG graph of a set of points N withRDG(N ).
The graphs defined are called proximitygraphs since the set of neighbors of anynode u in the computed graph can be calcu-lated based on the position of the neighbornodes in the original graph. Thus, proxim-ity graphs satisfy property(d).
The following relationships betweenproximity graphs have been proven[Goodman and O’Rourke 1997; Li et al.2002]: for any set of points N , RNG(N ) ⊆GG(N ), and RNG(N ) ⊆ YGc(N ), for anyc ≥ 6. Furthermore, MST(N ) is containedin RNG(N ), GG(N ), DG(N ) and YGc(N ),for any c≥6.
The distance stretch factor, the powerstretch factor, and the maximum nodedegree of the proximity graphs definedpreviously have been analyzed in Gaoet al. [2001], Li et al. [2002], and Wanget al. [2003] and are reported in Table I.As shown, the Gabriel Graph is energy-optimal since it has a power stretch factorof 1.
All the graphs defined previously havebeen shown to be sparse which impliesthat they have a constant average nodedegree. However, the maximum node de-gree is not constant in any of the con-sidered graphs. For this reason, severalvariants of these proximity graphs have
Table I. Distance Stretch Factor, Power StretchFactor, and Maximum Node Degree of Different
Proximity GraphsDistance Power Degree
RNG n − 1 n − 1 n − 1GG
√n − 1 1 n − 1
RDG 1+√
52 π
(1+
√5
2 π
)α
(n)
YGc1
1−2 sin πc
11−(2 sin π
c )α n − 1
been proposed with the purpose of bound-ing the maximum node degree. Unfortu-nately, it has been shown that no geo-metric graph with constant node degreecontains the minimum power path for anypair of nodes [Wang et al. 2002]. Thus, noenergy-optimal spanner with a constantbounded maximum node degree exists.To date, the routing graph with constantmaximum node degree which has the bestpower stretch factor is the OrdYaoGGgraph of Song et al. [2004] which is ob-tained by building the YGc graph, with c >6, on top of the GG. The OrdYaoGG graphhas a power stretch factor of ρ = 1
1−(2 sin πc )α ,
and maximum node degree of c + 5, wherec > 6 is the parameter of the Yao graph.For example, setting c = 9 and α = 2, wehave a power stretch factor of 1.88 with abound on the maximum node degree of 14.
5.2.2.2. Broadcast. Another relevantproblem that has been considered in theliterature is the determination of energy-efficient broadcast graphs. Here, theemphasis is on the one-to-all communi-cation scheme typical of broadcast ratherthan on point–to–point communications.
Similarly to the case of unicast, theconcept of broadcast stretch factor can bedefined. More precisely, let us consider aconnected maxpower graph G. Any broad-cast generated by node u can be seenas a directed spanning tree T , rooted atu, which we call a broadcast tree. Thepower cost of the broadcast tree T isdefined as follows. Denoting with pcT (v)the power consumed by node v to broad-cast the message along T , we have thatpcT (v) = 0 for any leaf node of T , andpcT (v) = max(v,w)∈T δα
v,w otherwise. Thus,the total power needed to broadcast themessage along the broadcast tree T is
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

180 P. Santi
pc(T ) = ∑v∈N pcT (v). A tree in G rooted
at u and consuming the minimum poweris called a minimum-power broadcast treeof u. Let G ′ be an arbitrary subgraph ofG. The broadcast stretch factor of G ′ withrespect to G is the maximum over all pos-sible nodes of the ratio between the cost ofthe minimum-power broadcast tree in G ′and in G. Formally, βG ′ = maxu∈N
pcG′ (u)pcG (u) ,
where pcG ′ (u) and pcG(u) denote the costof the minimum-power broadcast tree of uin G ′ and in G, respectively.
As in the case of unicast, the goal is tofind sparse broadcast spanners6 that canbe computed in a distributed and localizedfashion. Unfortunately, this task is moredifficult than in the case of unicast.
The problem of computing a minimum-power broadcast tree rooted at a node uhas been proven to be NP-hard indepen-dently in Cagali et al. [2002] and Liang[2002], under the hypothesis that nodescan transmit at different power levelsP = {p1, . . . , pk}, where the pi are ar-bitrary power levels, and k is an arbi-trary positive constant. Thus, the taskof finding the energy-optimal broadcasttree of a given communication graph Gis virtually impossible in any realisticscenario.
Wieselthier et al. [2000] introduce threegreedy heuristics for the minimum-powerbroadcast problem based on the con-struction of the MST and evaluate themby means of simulation. The broadcaststretch factor of the graphs generated bythese heuristics are formally derived inWan et al. [2002] where it is shown thatthe MST has a constant broadcast stretchfactor c for some 6 ≤ c ≤ 12. Thus, theMST is a broadcast spanner of the originalgraph. Unfortunately, the construction ofthe MST, as well as of the other graphs pro-posed in Wieselthier et al. [2000], requiresglobal information which can be a majordifficulty in implementing it in a real adhoc network. In order to circumvent thisproblem, Li et al. [2004] have recentlyproposed a localized, fully distributedalgorithm called LMSTk that builds a
6A subgraph G′ of graph G is a broadcast spanner ofG if it has O(1) broadcast stretch factor.
local approximation of the MST. LMSTkrequires exchanging O(n) messages (al-though the hidden constant is larger than225), and builds a O(nα−1) approxima-tion of the energy-optimal broadcast tree.Thus, LMSTk cannot be used to com-pute a broadcast spanner of G. To date,no distributed and localized algorithmthat constructs a broadcast spanner isknown.
Before ending this section, we want tooutline the similarities between the rangeassignment problem discussed in Section5.2.1 and the problem of energy-efficientbroadcast. Suppose G is the maxpowergraph on the set of points N . In the RA
problem, the goal is to find the energy-optimal range assignment that generatesa connected communication graph. Sup-pose an arbitrary node u ∈ N wants tobroadcast a message m, and let RA be theoptimal range assignment. A very simplebroadcast scheme is the following. Nodeu transmits m at distance RA(u), and ev-ery other node v, upon receiving m for thefirst time, retransmits it at distance RA(v).It is immediate that, after all nodes inN have transmitted the message once, mhas been broadcast to all network nodes.Thus, the energy cost of RA is an upperbound to the power cost of any broad-cast tree in G. We recall that the energycost of the optimal range assignment (andof the optimal weakly-symmetric rangeassignment) differs from the cost of theMST at most by factor 2. Since the MSTis a broadcast spanner of G, this im-plies that the communication graph gen-erated by the optimal (weakly-symmetric)range assignment is a broadcast spannerof G. Unfortunately this does not helpvery much since computing this graph intwo and three-dimensional networks isNP-hard.
5.2.3. Distributed Topology Control Protocols.In Sections 5.2.1 and 5.2.2, we havereviewed several problems related toenergy-efficient communication in wire-less ad hoc networks. In these ap-proaches to TC, it was assumed that exactnode positions are known (location-based
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 181
topology control), and the problem is one offinding a range assignment (and, thus, anetwork topology) which is optimal withrespect to a certain measure. Hence inthese approaches, the emphasis is on thequality of the topology produced ratherthan on the process of building the topol-ogy itself. Another branch of research fo-cused on more practical approaches tothe TC problem, trying to design sim-ple, fully distributed protocols that buildand maintain a reasonably good topology.We call these protocols topology controlprotocols.
Ideally, a topology control protocolshould be fully distributed, asynchronous,and localized. As discussed previously,these requirements are vital for an effec-tive implementation of the protocol, espe-cially in the presence of node mobility. An-other aspect to be considered is the qualityof the information needed by the topologycontrol protocol. In general, there is atrade-off between information quality andenergy consumption and/or interferencereduction: the more accurate the informa-tion required (e.g., exact node positions),the more energy savings/interferencereductions can be achieved. However, theprice to be paid (in terms of additionalhardware on the nodes or of additionalmessages to be exchanged) to obtain highquality information must be carefully con-sidered. For example, suppose protocol P1is based on location information, and pro-tocol P2 is based on distance estimation.Clearly, the cost of implementing P2 in areal network is lower than that requiredby P1 since the hardware needed to esti-mate distance between nodes is cheaperthan that required to estimate node po-sitions. So, if the energy savings providedby protocol P1 are not considerably higherthan those achieved by P2, a solutionbased on protocol P2 may be preferable inpractice.
Summarizing, a topology control proto-col should:
— be fully distributed and asynchronous;— rely on local information only;— generate a connected topology (at least
with high probability) composed ofbidirectional links7;
— rely on low quality information.
5.2.3.1. Location-Based TC Protocols. InRodoplu and Meng [1999], the authorspresented a distributed topology controlalgorithm that leverages on location in-formation (provided by low-power GPS re-ceivers) to build a topology that is provento minimize the energy required to com-municate with a given master node. In Liand Wan [2001], the authors described amore efficient implementation of the pro-tocol which, however, computes only an ap-proximation of the minimum energy topol-ogy.
In Ramanathan and Rosales-Hain[2000], the authors considered the prob-lem of minimizing the maximum of nodetransmitting ranges while achievingconnectedness. They also considered thestronger requirement of 2-connectivity ofthe communication graph. They presentcentralized topology control algorithmsthat provide the optimal solution for bothversions of the problem. The range as-signment returned by the algorithm hasthe additional property of being per-nodeminimal, that is, no transmitting rangecan be reduced further without impairingconnectivity (or 2-connectivity).
In Li et al. [2003], the authors intro-duced LMST, a fully distributed and local-ized protocol aimed at building an MST-like topology. The authors show that (1)the protocol generates a strongly con-nected communication graph; (2) the nodedegree of any node in the generated topol-ogy is at most 6; and (3) the topology can bemade symmetric by removing asymmetriclinks without impairing connectivity. Fur-thermore, the authors show through simu-lation that LMST outperforms CBTC (seethe following) and the protocol of Rodopluand Meng [1999] in terms of both aver-age node degree and average node trans-mitting range. A drawback of LMST isthat it requires location information thatcan be provided only with a considerable
7The motivation for using bidirectional links is givenin Section 5.2.1.
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

182 P. Santi
hardware and/or message cost. Recently,some of the authors of LMST introduceda fault-tolerant version of this algorithmwhich generates a k-connected topology[Li and Hou 2004].
5.2.3.2. Direction-Based TC Protocols. InWattenhofer et al. [2001], the authors in-troduced a distributed topology controlprotocol based on directional information,called CBTC (Cone Based Topology Con-trol). The basic idea is similar to the oneinspiring the Yao graph YG: a node utransmits with the minimum power pu,ρsuch that there is at least one neighbor inevery cone of angle ρ centered at u. The ob-tained communication graph is made sym-metric by adding the reverse edge to everyasymmetric link. The authors show thatsetting ρ ≤ 2π/3 is a sufficient conditionto ensure connectivity. A set of optimiza-tions aimed at pruning energy-inefficientedges without impairing connectivity (andsymmetry) is also presented. Further, theauthors prove that, if ρ ≤π/2, every nodein the final communication graph has de-gree of at most 6. A more detailed anal-ysis of CBTC, along with an improvedset of optimizations (which, however, relyon distance estimation), can be found inLi et al. [2001]. The CBTC protocol hasbeen extended to the case of nodes in thethree-dimensional space in Bahramgiriet al. [2002]. The authors of Bahramgiriet al. [2002] also presented a fault-tolerantversion of the protocol that guaranteesk-connectivity. In Huang et al. [2002], theCBTC protocol is implemented using di-rectional antennas.8
In Borbash and Jennings [2002], theauthors introduced a distributed protocolwhich is also based on directional informa-tion. The goal of the protocol is to build theRelative Neighbor Graph of the networkin a distributed fashion. The choice of theRNG as the target graph of the protocol isdue to the fact that it guarantees connec-tivity, and it shows good performance interms of average transmitting range, nodedegree, and hop diameter.
8Directional antennas have the ability to propagatethe radio signal only in specific directions.
5.2.3.3. Neighbor-Based TC Protocols. An-other class of topology control protocolsis based on the simple idea of connectingeach node to its k closest-neighbors.
The MobileGrid protocol of Liu andLi [2002] and the LINT protocol ofRamanathan and Rosales-Hain [2000] tryto keep the number of neighbors of a nodewithin a low and high threshold centeredaround an optimal value. When the ac-tual number of neighbors is below (above)the threshold, the transmitting range isincreased (decreased), until the numberof neighbors is in the proper range. How-ever, for both protocols no characteriza-tion of the optimal value of the number ofneighbors is given and, consequently, noguarantee on the connectivity of the re-sulting communication graph is provided.Another problem of the MobileGrid andLINT protocols is that they estimate thenumber of neighbors by simply overhear-ing control and data messages at differentlayers. This approach has the advantageof generating no control message overheadbut the accuracy of the resulting neighbornumber estimate heavily depends on thetraffic present in the network. In the ex-treme case, a node which remains silent isnot detected by any of its actual neighbors.
The problem of characterizing the min-imum value of k such that the result-ing communication graph is connected(the Critical Neighbor Number) has beeninvestigated in Xue and Kumar [2004]where it is shown that k ∈ (log n) is anecessary and sufficient condition for con-nectivity with high probability Recently,Wan and Yi [2004] have improved the up-per bound on the CNN for connectivityderived in Xue and Kumar [2004].
Based on Xue and Kumar’s [2004] the-oretical result, Blough et al. [2003] pro-pose the k-NEIGH protocol. The goal ofk-NEIGH is to keep the number of neigh-bors of a node equal to, or slightly below, agiven value k. The communication graphthat results is made symmetric by remov-ing asymmetric edges. Given the charac-terization of the critical neighbor num-ber presented in Xue and Kumar [2004],Blough et al. [2003] prove that the com-munication graph generated by k-NEIGH
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 183
Table II. Main Features of the Distributed Topology ControlProtocols Presented in this Article
Protocol Approach Connectivity Fault-ToleranceR&M loc-based yes noLMST loc-based yes yesCBTC dir-based yes yesRNG dir-based yes noLINT/LILT neigh-based unknown noMobileGrid neigh-based unknown noKNeigh neigh-based w.h.p. noXTC neigh-based yes no
when k ∈ (log n) is connected with highprobability. From a practical viewpoint,Blough et al. [2003] show through simula-tion that setting k = 9 is sufficient to ob-tain connected networks with high proba-bility for networks with n ranging from 50to 500. Furthermore, the authors analyzethe time and message complexity of theprotocol and present simulation resultsthat show that the topology generated byk-NEIGH is, on average, 20% more energyefficient than that generated by CBTC.
A protocol that shares many similar-ities with k-NEIGH is the XTC protocolpresented in Wattenhofer and Zollinger[2004]: the neighbors of a node u are or-dered according to some metric (e.g., dis-tance or link quality), and u decides whichnodes are kept as immediate neighborsin the final network topology based on asimple rule. Contrary to k-NEIGH, whichachieves connectivity with high probabil-ity, XTC builds a topology which is con-nected whenever the maxpower communi-cation graph is connected. To achieve this,the requirement of having an upper boundk on the number of neighbors of a node isdropped. Contrary to k-NEIGH, in XTC, anode can have as much as n − 1 neighborsin the final topology.
The main features of the distributedtopology control protocols presented inthis section are summarized in Table II.
5.3. Discussion of Energy Cost
The results of Sections 5.1 and 5.2 canbe used to evaluate the potential bene-fit (in terms of energy cost) achieved bytopology control protocols. In fact, the so-lution to the range assignment problemRA can be seen, at least to a certain ex-tent, as the best possible result of the
execution of a topology control protocol.On the other hand, the critical transmit-ting range for connectivity considered inSection 5.1 is representative of the sce-nario in which only a straightforward typeof topology control is feasible.
The following theorem is a consequenceof the results presented in Santi andBlough [2003].
THEOREM 5.7 Let l be a positive realnumber sufficiently large, and let N be aset of n nodes positioned uniformly and in-dependently at random in R = [0, l ]d , withd =1, 2, 3. Assume the distance-power gra-dient α is 2, and denote by cmin(N ) the costof the r-homogeneous range assignmentsuch that r is minimum, and the resultingcommunication graph is connected. Then,with high probability:
cmin(N ) =
O( l2 log2 ln ) for d =1
O(l2 log l ) for d =2
O(l2n1/3 log2/3 l ) for d =3.
The bounds of Theorem 5.7 can becompared to similar bounds obtained inBlough et al. [2002], Clementi et al. [1999,2000a, 2000b], and Kirousis et al. [2000]for the range assignment problem. Thefollowing result for one-dimensional net-works is an easy consequence of the re-sults presented in Clementi et al. [2000a,2000b] and Kirousis et al. [2000]:
PROPOSITION 5.8 Let N be a set of ncollinear points equally spaced at distanceδ >0. The energy cost of the solution of RA
on input N is (δ2n).
Assuming that the n nodes are placedalong a line of length l , the bound of
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

184 P. Santi
Proposition 5.8 can be restated as ( l2
n ). Itis not difficult to show that equally spacingnodes is the most energy-efficient place-ment. It follows that the energy cost of anyinstance (including a random one9) of RA
is �( l2
n ). Comparing this bound with theupper bound reported in Theorem 5.7 ford =1, we have that the asymptotic gap be-tween the energy cost of the optimal rangeassignment and that of the optimal ho-mogeneous range assignment is at mostlog2 l . Hence, the asymptotic benefit of theadoption of a topology control mechanismin one-dimensional networks is at most afactor of log2 l .
Bounds on the energy cost of the solu-tion of the random instance of RA in twoand three dimensions have been obtainedin Blough et al. [2002], and are (l2) ford =2, and (l2n1/3) for d =3. By Theorem5.7, we can conclude that the asymptoticbenefit of the adoption of a topology controlmechanism is at most a factor of log l intwo-dimensional networks, and at most afactor of log2/3l in three-dimensional net-works.
The comparison of the bounds on the en-ergy cost of the optimal solution of RA andCTR in one, two, and three-dimensionalnetworks indicates that the benefit, ex-pressed in terms of energy cost, of theadoption of a topology control mechanismincreases with the length l of the sideof the deployment region but becomesless significant for networks of higherdimension.
6. MOBILE NETWORKS
In Section 5, we have analyzed severalproblems related to energy-efficient com-munication in stationary wireless ad hocnetworks. In this section, we will discusshow node mobility affects topology controlin general.
The impact of mobility on topology con-trol is twofold:
9Here, with random instance we mean an instanceof the problem in which node positions are chosenuniformly at random in the deployment region R =[0, l ]d .
— Increased message overhead. The im-plementation of any distributed topol-ogy control protocol causes a certainmessage overhead which is due to thefact that nodes need to exchange mes-sages in order to set the transmittingrange to the appropriate value. In thecase of stationary networks, the topol-ogy control protocol is, in general, ex-ecuted once at the beginning of thenetwork operational time, and then pe-riodically to account for node join/leave.Thus, the efficiency of the protocol (ex-pressed here in terms of message over-head) has relatively little importance,and the emphasis is more on the qualityof the produced topology. In the pres-ence of mobility, the topology controlprotocol must be executed frequently inorder to account for the new positionsof the nodes. Thus, reducing messageoverhead is fundamental when imple-menting topology control mechanismsin mobile networks (especially in thecase of high mobility scenarios) evenif reducing message overhead comes atthe cost of a lower quality of the con-structed topology.
— Nonuniform node spatial distribution.As it will be discussed in detail later,some mobility patterns cause a nonuni-form node spatial distribution. Thisfact should be carefully taken into ac-count in setting important network pa-rameters (e.g., the critical transmittingrange) at the design stage.
From this discussion, it is clear thatthe impact of mobility on the effective-ness of topology control techniques heav-ily depends on the mobility pattern. Forthis reason, we first present the mobilitymodels which have been considered in theliterature.
6.1. Mobility Models
The most widely used mobility model inthe ad hoc network community is the ran-dom waypoint model [Johnson and Maltz1996]. In this model, every node choosesuniformly at random a destination in[0, l ]d (the waypoint) and moves towards
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 185
it along a straight line with a velocity cho-sen uniformly at random in the interval[vmin, vmax]. When it reaches the destina-tion, it remains stationary for a predefinedpause time tpause, and then it starts movingagain according to the same rule.
A similar model is the random direc-tion model [Bettstetter 2001; Royer et al.2001] in which nodes move with the di-rection chosen uniformly in the interval[0, 2π ] and the velocity chosen uniformlyat random in the interval [vmin, vmax]. Af-ter a randomly chosen time taken usuallyfrom an exponential distribution, the nodechooses a new direction. A similar proce-dure is used to change velocity, using anindependent stochastic process.
Contrary to the case of the randomwaypoint and the random direction modelwhich resemble (at least to some extent)intentional motion, the class of Brownian-like mobility models resembles noninten-tional movement. For example, in themodel used in Blough et al. [2002], mo-bility is modeled using parameters pstat,pmove, and m. Parameter pstat representsthe probability that a node remains sta-tionary during the entire simulation time.Hence, only (1 − pstat)n nodes (on the av-erage) will move. Introducing pstat into,the model accounts for those situations inwhich some nodes are not able to move. Forexample, this could be the case when sen-sors are spread from a moving vehicle, andsome of them remain entangled, for exam-ple, in a bush or tree. This can also modela situation where two types of nodes areused, one type that is stationary and an-other type that is mobile. Parameter pmoveis the probability that a node moves at agiven step. This parameter accounts forheterogeneous mobility patterns in whichnodes may move at different times. Intu-itively, the smaller the value of pmove, themore heterogeneous the mobility patternis. However, values of pmove close to 0 re-sult in an almost stationary network. If anode is moving at step i, its position in stepi + 1 is chosen uniformly at random in thesquare of side 2m centered at the currentnode location. Parameter m models, to acertain extent, the velocity of the nodes:the larger m is, the more likely it is that a
node moves far away from its position inthe previous step.
Observe that, in the case of randomdirection or Brownian-like motion, nodesmay, in principle, move out of the deploy-ment region. Since a standard approach insimulations is to keep the number of net-work nodes constant, we need a so-calledborder rule [Bettstetter 2001]/ that defineswhat to do with nodes that are about toleave the deployment region. In this situ-ation, a node can be:
(1) bounced back according to some rule;(2) positioned at the point of intersection
of the boundary with the line connect-ing the current and the desired nextposition;
(3) wrapped around to the other side of theregion which is considered as a torus;
(4) deleted, and a new node initialized ac-cording to the initial distribution;
(5) forced to choose another position untilthe chosen position is inside the bound-aries of the deployment region.
Depending on the choice of the borderrule, nonuniformity in the node spatialdistribution can be produced. For example,the second rule described places nodes ex-actly on the boundary of the region withhigher probability than at other points. Infact, the only two rules that do not appearto favor one part of the region over anotherare the torus rule (3) and rule (5) one inwhich a node is eliminated when it wouldcross the boundary and a new node is cre-ated in its place. However, these rules ap-pear quite unrealistic and are used mainlyto artificially generate a more uniformnode spatial distribution.
For a more exhaustive survey of mo-bility models in wireless networks, thereader is referred to Bettstetter [2001] andCamp et al. [2002].
6.2. Homogeneous Topology Control
If deriving analytical results for station-ary networks is difficult, deriving theo-retical results regarding mobile ad hocnetworks is even more challenging, evenin the simpler case of topology control,
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

186 P. Santi
that is, in case of homogeneous rangeassignment.
When the range assignment is homoge-neous, the message overhead is not an is-sue since the nodes’ transmitting rangeis set at the design stage, and it can-not be changed dynamically. However, thenode spatial distribution generated by themobility model could be an issue. Forinstance, it is known [Bettstetter 2001;Bettstetter and Krause 2001; Bettstetteret al. 2003; Blough et al. 2002] that therandom waypoint model generates a nodespatial distribution which is independentof the initial node positions and in whichnodes are concentrated in the center ofthe deployment region. This phenomenon,which is known as the border effect, isdue to the fact that, in the random way-point model, a node chooses a uniformlydistributed destination point rather thana uniformly distributed angle. Therefore,nodes located at the border of the regionare very likely to cross the center of theregion on their way to the next waypoint.The intensity of the border effect mainlydepends on the pause time tpause. In fact,a longer pause time tends to increase thepercentage of nodes that are resting at anygiven time. Since the starting and desti-nation points of a movement are chosenuniformly in [0, l ]d , this implies that a rel-atively long pause time generates a moreuniform node spatial distribution.
An immediate consequence of the factthat the node spatial distribution in thepresence of mobility is, in general, nonuni-form is that results concerning the criticaltransmitting range in stationary networks(which are based on the uniformity as-sumption) cannot be directly used. For thisreason, the relationship between the crit-ical transmitting range with and withoutmobility must be carefully investigated.
Sanchez et al. [1999] analyze theprobability distribution of the criticaltransmitting range in the presence of dif-ferent mobility patterns (random way-point, random direction, and Brownian-like) through simulation. The simulationresults seem to indicate that the mobilitypattern has little influence on the distri-bution of the critical transmitting range.
Unfortunately, the significance of the find-ings of Sanchez et al. [1999] is partly im-paired by the fact that the toroidal borderrule is used in simulations and that thevalues of the mobility parameters used inthe experiments (such as tpause in the ran-dom waypoint model) are not reported.
Santi and Blough [2003, 2002] investi-gate the relationship between the criticaltransmitting range in stationary and inmobile networks through extensive sim-ulation. They consider random waypointand Brownian-like motion and analyzedifferent critical values for the node trans-mitting range that are representative ofdifferent requirements on network con-nectivity (for instance, connectivity dur-ing 100% and 90% of the simulation time).The simulation results show that a rela-tively modest increase of the transmittingrange with respect to the critical valuein the stationary case is sufficient to en-sure network connectivity during 100% ofthe simulation time. The increase is about21% in the random waypoint and about25% in the Brownian-like model. Further-more, the simulation results show that thetransmitting range can be considerably re-duced (in the order of 35–40%) if the re-quirement for connectivity is only on 90%of the simulation time.
Further insights into the relationshipbetween the stationary and mobile criti-cal transmitting range can be derived fromthe statistical analysis of the node spatialdistribution of mobile networks reportedin Blough et al. [2002]. Again, the authorsconsider random waypoint and Brownian-like mobility and perform several statisti-cal tests on the node spatial distributiongenerated by these models. The resultsof these tests show that the distributiongenerated by Brownian-like motion is vir-tually indistinguishable from the uniformdistribution and confirm the occurrence ofthe border effect in random waypoint mo-tion, whose intensity heavily depends onthe value of tpause. In the extreme case oftpause =0, the random waypoint model gen-erates a node spatial distribution which isconsiderably different from uniform. Over-all, the analysis of Blough et al. [2002] in-dicate that Brownian-like mobility should
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 187
have little influence on the value of thecritical transmitting range, while the ef-fect of random waypoint mobility on thecritical transmitting range should heav-ily depend on the settings of the mobilityparameters.
The quality of the observation above isconfirmed by the probabilistic analysis re-ported in Santi [2005] which is, to thebest of our knowledge, the only theoret-ical result concerning the critical trans-mitting range in the presence of mobilityreported in the literature so far. Denot-ing with r and r p
m the critical transmittingrange in the case of uniformly distributednodes and of random waypoint mobile net-works with tpause = p, respectively, andwith v = vmin = vmax the node velocity, theauthor shows that
r pm
r= p + 0.521405
v
p> 1
if p > 0, and that r pmr → ∞ otherwise
(asymptotically, as n → ∞). The authorvalidates this result through simulations,whose results show an interesting thresh-old phenomenon: for small values of n (n≤50), r p
m is less than r, while for larger valueof n the situation is reversed. This phe-nomenon is caused by the border effect in-duced by random waypoint mobility whichtends to concentrate nodes in the center ofthe deployment region. When n is small,the probability of finding at least one nodeclose to the border is very low, and the crit-ical transmitting range is smaller than inthe stationary case. However, when n islarge enough, some of the nodes actuallylie close to the border of the deploymentregion, forcing a higher value of r p
m.
6.3. Nonhomogeneous Topology Control
In the case of nonhomogeneous topologycontrol, the more relevant effect of mobil-ity is the message overhead generated toupdate the nodes’ transmitting range inresponse to node mobility. The amount ofthis overhead depends on the frequencywith which the reconfiguration protocolused to restore the desired network topol-
ogy is executed. In turn, this depends onseveral factors such as the mobility pat-tern and the properties of the topologygenerated by the protocol. To clarify thispoint, let us consider two topology con-trol protocols P1 and P2. Protocol P1 buildsthe MST in a distributed fashion and setsthe nodes’ transmitting range accordingly,while protocol P2 attempts to keep thenumber of neighbors of each node belowa certain value k as in the k-NEIGH proto-col of Blough et al. [2003]. Protocol P1 isbased on global and very precise informa-tion, since the MST can be built only if theexact position of every node in the networkis known. In principle, P1 should be re-configured every time the relative positionof any two nodes in the network changessince this change could cause edge inser-tion/removal in the MST. On the otherhand, P2 can be easily computed in a lo-calized fashion and can be implementedusing relatively inaccurate informationsuch as distance estimation. In this case,the protocol should be reexecuted onlywhen the relative neighborhood relationof some node changes. It is quite intuitivethat this occurs less frequently than edgeinsertion/removal in the MST. It shouldalso be observed that having a topologythat is not up-to-date is much more crit-ical in the case of the MST than in caseof the k-neighbors graph. In fact, a sin-gle edge removal in the MST is sufficientto disconnect the network, while severaledges can, in general, be removed from thek-neighbors graph without impairing con-nectivity. Overall, we can reasonably statethat P1 should be reexecuted much morefrequently than P2. Further, we observethat the reconfiguration procedure neededto maintain the MST is more complicatedthan that required by the k-neighborsgraph since it relies on global information.So, we can conclude that protocol P1 is notsuitable to be implemented in a mobile sce-nario; in other words, it is not resilient tomobility.
From the previous discussion, it is clearthat a mobility resilient topology con-trol protocol should be based on a topol-ogy which can be computed locally andwhich requires little maintenance in the
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

188 P. Santi
presence of mobility. Many of the topologycontrol protocols presented in the litera-ture meet this requirement. However, onlysome of them have been defined to explic-itly deal with node mobility.
In Li et al. [2001], an adaptation of theCBTC protocol to the case of mobile net-works is discussed. It is shown that, ifthe topology ever stabilizes and the recon-figuration protocol is executed, then thenetwork topology remains connected. Thereconfiguration procedure is adapted tothe case of k-connectivity in Bahramgiriet al. [2002].
In Rodoplu and Meng [1999], the au-thors discuss how their protocol can beadapted to the mobile scenario and evalu-ate the protocol power consumption in thepresence of a mobility pattern which re-sembles the random direction model.
The MobileGrid [Liu and Li 2002] andLINT [Ramanathan and Rosales-Hain2000] protocols, which are based on thek-neighbors graph, are explicitly designedto deal with node mobility. They are zero-overhead protocols since the estimationof the number of neighbors is based onthe overhearing of data and control traf-fic. However, no explicit guarantee onnetwork connectivity is given and onlysimulation results are reported by theauthors.
A more subtle effect of mobility on cer-tain topology control protocols is due tothe possibly nonuniform node spatial dis-tribution generated by the mobility pat-tern. This fact should be considered insetting fundamental protocol parameterssuch as the critical neighbor number in k-neighbors graph-based protocols [Bloughet al. 2002; Liu and Li 2002; Ramanathanand Rosales-Hain 2000]. In other words,it could be the case that the number ofneighbors k needed to obtain connectiv-ity with high probability in the presence ofuniform node distribution is significantlydifferent from the value km needed whenthe node distribution is nonuniform, suchas in the presence of random waypointmobility. Clearly, if nodes are expected tomove with random waypoint-like mobility,km must be used instead of k in the proto-col implementation.
7. OPEN ISSUES
Topology control has received increasingattention in the wireless ad hoc networkcommunity in recent years, as witnessedby the considerable body of research inthis field reported in this article. However,several aspects related to topology con-trol have not been carefully investigatedyet. In this final section, we outline someof them which we hope will motivate re-searchers to undertake additional studieson this field.
TC for Interference. As stated in theintroduction, topology control techniqueshave the potential to mitigate two impor-tant problems occurring in wireless adhoc networks: node energy consumptionand radio interference. Although theacknowledged advantages of TC aretwofold, current literature on this topicfocused solely on reducing energy con-sumption. Only very recently have someauthors investigated the topology controlproblem with the goal of reducing radiointerference. Burkhart et al. [2004] showthat reducing energy consumption andinterference might be conflicting goalsand present centralized and distributedalgorithms to build low-interferencetopologies. Moaveni-Nejad and Li [2005]consider several measures of radio inter-ference in the communication graph andpropose algorithms for building optimal ornear-optimal topologies according to thesemetrics. However, the studies presentedin Burkhart et al. [2004] and Moaveni-Nejad and Li [2005] are only initial stepstowards a thorough understanding of theinterrelationship between range assign-ment and level of interference generatedin the network and further research onthis topic is needed.
More Realistic Models. The point graphmodel used to derive most of the resultspresented in this article is an idealizedmodel of a real ad hoc network. Althoughpoint graphs have proven useful to de-rive qualitative results, they can hardlybe used to obtain the accurate quantita-tive information needed by the networkdesigner. So, the need for a more realisticnetwork model is urgent.
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 189
There are several ways in which thepoint graph model can be modified in orderto be more realistic. For instance, we coulddefine the occurrence of links betweennodes in probabilistic rather than deter-ministic terms. A possible model could bethe following. Given nodes u and v at dis-tance δu,v, we have a link between u and vwith probability 1 if δu,v ≤ δ, where δ is anarbitrary constant, and with probabilityp(δu,v)<1 otherwise, where p(δu,v) is an ar-bitrary decreasing function of the distancewith values in [0, 1]. This characterizationof the occurrence of a wireless link is farmore realistic than the 1/0 characteriza-tion used in the point graph model. For ex-ample, there could exist nodes u, v, w withδu,v = δu,w > δ such that link (u, v) existsand link (u, w) does not. Thus, the radiocoverage area is, in general, not regularas is the case in real wireless networks.Radio link models similar to the one de-scribed previously have been introducedin Farago [2002] and Booth et al. [2003].In particular, Booth et al. study networkconnectivity under this more realistic linkmodel and argue that the characteriza-tion of the critical range for connectivitybased on the assumption of circular cover-age area can be seen as a worst-case anal-ysis provided the (possibly irregular) areacovered by the radio signal remains thesame.
Another possibility to make the net-work model more realistic is to take intoaccount interferences between nodes. Forexample, in Dousse et al. [2003] a bidirec-tional link between nodes u and v existsif the signal to noise ratio at the receiveris larger than some threshold where thenoise is the sum of the contribution ofinterferences from all other nodes and ofa background noise. The authors analyzethe impact of such a wireless link modelon network connectivity.
Note that there is another major driverfor more realistic network models, namelythe usage of link-layer retransmission pro-tocols. In fact, it turns out that it usuallypays off in term of minimal overall en-ergy consumption in the presence of re-transmissions to use connections at theboundary of the radio coverage area where
the packet loss probability is below 1 butgreater than 0. This fact, which has beenobserved in Seada et al. [2004], should beaccounted for in the design of topology con-trol mechanisms.
Although some research on the charac-terization of fundamental network prop-erties with a more realistic link model hasbeen recently done, further investigationin this direction is needed.
More Realistic Node Distribution. A sim-plifying assumption commonly used inthe analysis of ad hoc networks is thatnodes are uniformly distributed in the de-ployment region. Although this assump-tion seems reasonable in some settings,it is quite unrealistic in many scenarios.For instance, as discussed earlier, this as-sumption does not hold when the nodesmove according to the random waypointmodel. Further, when nodes are dispersedfrom a moving vehicle, the assumption ofuniform distribution is only a rough ap-proximation of the actual node distribu-tion. Thus, the analysis of network prop-erties in the presence of nonuniform nodespatial distributions is another step for-ward in the direction of a more realisticcharacterization of ad hoc networks.
More Accurate Analysis of Mobile Networks.More work needs to be done to investigatethe effect of mobility on topology control.In particular, the following issues need tobe addressed.
— Is mobility beneficial or detrimental?On the one hand, we have seen thatmobility causes an increased messageoverhead to restore the desired topol-ogy. On the other hand, mobility hasthe positive effect of balancing the nodeenergy consumption. In stationary net-works, if a node u has twice the trans-mitting range of node v, it is likely to de-plete its battery much faster than nodev. In the presence of mobility, nodeschange the transmitting range dynam-ically and a more balanced energyconsumption is likely to occur. Sinceone of the ultimate goals of topologycontrol is to extend network lifetime,
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

190 P. Santi
the overall effect of mobility on thenetwork lifetime should be carefullyinvestigated.
— Determination of the optimal frequencyfor reconfiguration. As outlined inSection 6, there is a trade-off betweenthe message overhead caused by atopology control protocol and the qual-ity of the topology generated. In gen-eral, to have a high quality topology(e.g., a connected topology), we shouldexecute the reconfiguration protocolfrequently. On the other hand, each ex-ecution of the reconfiguration protocolcauses a significant message overhead.The careful investigation of this tradeoff would help in answering the previ-ous issue.
Group Mobility. In most of the mobil-ity models considered in the literature(such as the random waypoint, random di-rection, and Brownian-like model), nodesmove independently one of each other.However, in many realistic scenarios, net-work nodes move in groups. This could bethe case, for instance, of sensors dispersedin the ocean to monitor water temperaturewhich are moved by ocean flows, or thecase of cars on a freeway which exchangemessages with the purpose of rapidlypropagating information about traffic con-ditions. Thus, the impact of group mobilityon topology control should be carefully in-vestigated.
Implementation of TC. Despite the consid-erable body of research devoted to topologycontrol presented in this article, and themany theoretical and simulation-basedevidences of the effectiveness of topologycontrol techniques in reducing energy con-sumption and/or increasing network ca-pacity, to date there is little experimentalevidence that topology control can actuallybe used to these purposes. This is perhapsthe main open issue in the field.
Note that the almost complete lack ofexperimental results about topology con-trol techniques is not due to technologi-cal problems as current wireless networkcards (see, e.g., the CISCO Aironet 802.11cards [Cisco 2004]) and wireless sensor
nodes allow the transmitted power to bedynamically adjusted.
ACKNOWLEDGMENTS
The author wishes to thank the anonymous review-ers for the many suggestions that helped improvingthe presentation quality of the article.
REFERENCES
ALDOUS, D. AND STEELE, J. 1992. Asymptotics foreuclidean minimal spanning trees on randompoints. Probab. Theo. Relat. Fields 92, 247–258.
ALTHAUS, E., CALINESCU, G., MANDOIU, I., PRASAD,S., TCHERVENSKI, N., AND ZELIKOVSKY, A. 2003.Power efficient range assignment in ad hocwireless networks. In Proceedings of the IEEEWireless Communications and Networking Con-ference (WCNC)’03.
BAHRAMGIRI, M., HAJIAGHAYI, M., AND MIRROKNI, V.2002. Fault-tolerant ad 3-dimensional dis-tributed topology control algorithms in wirelessmultihop networks. In Proceedings of the IEEEInternational Conference on Computer Commu-nications and Networks. 392–397.
BAO, L. AND GARCIA-LUNA-ACEVES, J. 2001. Channelaccess scheduling in ad hoc networks with unidi-rectional links. In Proceedings of Discrete Algo-rithms and Methods for Mobile Computing andCommunications (DIALM). 9–18.
BASAGNI, S., BRUSCHI, D., AND CHLAMTAC, I. 1999.A mobility-transparent deterministic broadcastmechanism for ad hoc networks. IEEE Trans.Netw. 7, 6, 799–807.
BETTSTETTER, C. 2001. Smooth is better thansharp: A random mobility model for simulationof wireless networks. In Proceedings of the ACMWorkshop on Modeling, Analysis and Simulationof Wireless and Mobile Systems (MSWiM). 19–27.
BETTSTETTER, C. 2002a. On the connectivity ofwireless multihop networks with homogeneousand inhomogeneous range assignment. In Pro-ceedings of the 56th IEEE Vehicular TechnologyConference (VTC). 1706–1710.
BETTSTETTER, C. 2002b. On the minimum nodedegree and connectivity of a wireless multihopnetwork. In Proceedings of the ACM MobiHoc 02.80–91.
BETTSTETTER, C. AND KRAUSE, O. 2001. On bordereffects in modeling and simulation of wirelessad hoc networks. In Proceedings of the IEEE In-ternational Conference on Mobile and WirelessCommunication Network (MWCN).
BETTSTETTER, C., RESTA, G., AND SANTI, P. 2003. Thenode distribution of the random waypoint mo-bility model for wireless ad hoc networks. IEEETrans. Mobile Comput. 2, 3, 257–269.
BLOUGH, D., LEONCINI, M., RESTA, G., AND SANTI,P. 2002. On the symmetric range assignment
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 191
problem in wireless ad hoc networks. In Proceed-ings of the IFIP Conference on Theoretical Com-puter Science. 71–82.
BLOUGH, D., LEONCINI, M., RESTA, G., AND SANTI, P.2003. The k-neighbors protocol for symmetrictopology control in ad hoc networks. In Proceed-ings of the ACM MobiHoc 03. 141–152.
BLOUGH, D., RESTA, G., AND SANTI, P. 2002. A sta-tistical analysis of the long-run node spatial dis-tribution in mobile ad hoc networks. In Proceed-ings of the ACM Workshop on Modeling, Analysis,and Simulation of Wireless and Mobile Systems(MSWiM). 30–37.
BOLLOBAS, B. 1985. Random Graphs. AcademicPress, London, UK.
BOOTH, L., BRUCK, J., COOK, M., AND FRANCESCHETTI,M. 2003. Ad hoc wireless networks with noisylinks. In Proceedings of the IEEE InternationalSymposium on Information Theory (ISIT).
BORBASH, S. AND JENNINGS, E. 2002. Distributedtopology control algorithm for multihop wire-less networks. In Proceedings of the IEEE Inter-national Joint Conference on Neural Networks.355–360.
BRUCK, J., FRANCESCHETTI, M., AND SCHULMAN, L.2002. Microcellular systems, random walks,and wave propagation. In Proceedings of theIEEE Symposium on Antennas and Propaga-tion. 220–223.
BURKHART, M., RICKENBACH, P. V., WATTENHOFER, R., AND
ZOLLINGER, A. 2004. Does topology control re-duce interference? In Proceedings of ACM Mobi-Hoc 04. 9–19.
CAGALI, M., HUBAUX, J., AND ENZ, C. 2002.Minimum-energy broadcast in all-wirelessnetworks: Np-completeness and distributionissues. In Proceedings of the ACM Mobicom 02.172–182.
CALINESCU, G., MANDOIU, I., AND ZELIKOVSKY, A. 2002.Symmetric connectivity with minimum powerconsumption in radio networks. In Proceedingsof the IFIP Conference on Theoretical ComputerScience. 119–130.
CALINESCU, G. AND WAN, P. 2003. Range assignmentfor high connectivity in wireless ad hoc net-works. In Proceedings of the Ad Hoc Networksand Wireless. 235–246.
CAMP, T., BOLENG, J., AND DAVIES, V. 2002. A surveyof mobility models for ad hoc network research.Wirel. Comm. Mobile Comput. 2, 5, 483–502.
CHLAMTAC, I. AND FARAGO, A. 1999. A new approachto the design and analysis of peer-to-peer mobilenetworks. ACM/Baltzer Wirel. Netw. 5, 149–156.
CISCO. 2004. Aironet data sheets. Available athttp://www.cisco.com/en/US/products/hw//wireless.
CLEMENTI, A., FERREIRA, A., PENNA, P., PERENNES, S.,AND SILVESTRI, R. 2000a. The minimum rangeassignment problem on linear radio networks. InProceedings of the 8th European Symposium onAlgorithms (ESA). 143–154.
CLEMENTI, A., PENNA, P., AND SILVESTRI, R. 1999.Hardness results for the power range assign-ment problem in packet radio networks. InProceedings of the 2nd International Workshopon Approximation Algorithms for CombinatorialOptimization Problems (RANDOM/APPROX).197–208.
CLEMENTI, A., PENNA, P., AND SILVESTRI, R. 2000b.The power range assignment problem in radionetworks on the plane. In Proceedings of the 17thSymposium on Theoretical Aspects of ComputerScience (STACS). 651–660.
DETTE, H. AND HENZE, N. 1989. The limit distribu-tion of the largest nearest-neighbor link in theunit d -cube. J. Appl. Probab. 26, 67–80.
DIAZ, J., PENROSE, M., PETITA, J., AND SERNA, M. 2000.Convergence theorems for some layout measureson random lattice and random geometric graphs.Combin., Probab., Comput. 6, 489–511.
DOUSSE, O., BACCELLI, F., AND THIRAN, P. 2003. Im-pact of interferences on connectivity in ad hocnetworks. In Proceedings of IEEE Infocom.1724–1733.
DOUSSE, O., THIRAN, P., AND HASLER, M. 2002. Con-nectivity in ad hoc and hybrid networks. InProceedings of IEEE Infocom. 1079–1088.
ESTRIN, D., GOVINDAN, R., HEIDEMANN, J., AND KUMAR, S.1999. Next century challenges: Scalable coor-dination in sensor networks. In Proceedings ofthe ACM Mobicom. 263–270.
FARAGO, A. 2002. Scalable analysis and design ofad hoc networks via random graph theory. InProceedings of ACM Discrete Algorithms andMethods for Mobile Computing and Communi-cation (DIALM). 43–50.
GAO, J., GUIBAS, L., HERSHBERGER, J., ZHANG, L., AND
ZHU, A. 2001. Geometric spanners for routingin mobile networks. In Proceedings of the ACMMobiHoc. 45–55.
GERLA, M. AND TSAI, J. T.-C. 1995. Multicluster, mo-bile, multimedia radio networks. ACM/BaltzerWirel. Netw. 1, 255–265.
GOODMAN, J. AND O’ROURKE, J. 1997. Handbookof Discrete and Computational Geometry. CRCPress, New York, NY.
GROSSGLAUSER, M. AND TSE, D. 2001. Mobility in-creases the capacity of ad hoc wireless networks.In Proceedings of IEEE Infocom. 1360–1369.
GUPTA, P. AND KUMAR, P. 1998. Critical power forasymptotic connectivity in wireless networks.Stochastic Analysis, Control, Optimization andApplications. Birkpauser, Boston, MA. 547–566.
GUPTA, P. AND KUMAR, P. 2000. The capacity of wire-less networks. IEEE Trans. Inf. Theo. 46, 2, 388–404.
HEINZELMAN, W., KULIK, J., AND BALAKRISHNAN, H.1999. Adaptive protocols for informationdissemination in wireless sensor networks. InProceedings of ACM Mobicom. 174–185.
HOLST, L. 1980. On multiple covering of a circlewith random arcs. J. Appl. Probab. 16, 284–290.
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

192 P. Santi
HUANG, Z., SHEN, C., SRISATHAPORNPHAT, C., AND
JAIKAEO, C. 2002. Topology control for ad hocnetworks with directional antennas. In Proceed-ings of the IEEE International Conference onComputer Communications and Networks. 16–21.
IEEE. 1999. Wireless lan medium access controland physical layer specifications. In IEEE 802.11Standard (IEEE Computer Society LAN MANStandards Committee).
JANSON, S., KNUTH, D., LUCZAK, T., AND PITTEL, B.1993. The birth of the giant component. Rand.Struct. Algor. 4, 3, 233–359.
JOHNSON, D. AND MALTZ, D. 1996. Dynamic sourcerouting in ad hoc wireless networks. In MobileComputing. Kluwer Academic Publishers. 153–181.
KHAN, J., KATZ, R., AND PISTER, K. 2000. Emergingchallenges: Mobile networking for smart dust. J.Comm. Netw. 2, 3, 186–196.
KIM, D., TOH, C., AND CHOI, Y. 2001. On supportinglink asymmetry in mobile ad hoc networks. InProceedings of IEEE Globecom. 2798–2803.
KIROUSIS, L., KRANAKIS, E., KRIZANC, D., AND PELC, A.2000. Power consumption in packet radio net-works. Theoret. Comput. Sci. 243, 289–305.
KO, Y. AND VAIDYA, N. 1998. Location-aided routing(lar) in mobile ad hoc networks. In Proceedingsof ACM Mobicom. 66–75.
KOLCHIN, V., SEVAST’YANOV, B., AND CHISTYAKOV, V.1978. Random Allocations. V.H. Winston andSons, Washington D.C.
LI, J., BLAKE, C., COUTO, D. D., LEE, H. I., AND
MORRIS, R. 2001. Capacity of ad hoc wirelessnetworks. In Proceedings of ACM Mobicom. 61–69.
LI, L., HALPERN, J., BAHL, P., WANG, Y., AND
WATTENHOFER, R. 2001. Analysis of a cone-based distributed topology control algorithmfor wireless multi-hop networks. In Proceed-ings of ACM Principles of Distributed Company(PODC). 264–273.
LI, N. AND HOU, J. 2004. Flss: a fault-tolerant topol-ogy control algorithm for wireless networks. InProceedings of ACM Mobicom. 275–286.
LI, N., HOU, J., AND SHA, L. 2003. Design and anal-ysis of an mst-based topology control algorithm.In Proceedings of the IEEE Infocom. 1702–1712.
LI, X. AND WAN, P. 2001. Constructing minimumenergy mobile wireless networks. In Proceedingsof ACM Mobihoc. 283–286.
LI, X., WAN, P., WANG, Y., AND FRIEDER, O. 2002.Sparse power efficient topology for wirelessnetworks. In Proceedings of the IEEE HawaiiInternational Conference on System Sciences(HICSS).
LI, X., WANG, Y., AND SONG, W. 2004. Applications ofk-local mst for topology control and broadcastingin wireless ad hoc networks. IEEE Trans. Paral.Distr. Syst. 15, 12, 1057–1069.
LIANG, W. 2002. Constructing minimum-energybroadcast trees in wireless ad hoc networks. InProceedings of ACM Mobihoc. 112–122.
LIU, J. AND LI, B. 2002. Mobilegrid: Capacity-awaretopology control in mobile ad hoc networks. InProceedings of the IEEE International Confer-ence on Computer Communications and Net-works. 570–574.
LOYD, E., LIU, R., MARATHE, M., RAMANATHAN, R., AND
RAVI, S. 2002. Algorithmic aspects of topologycontrol problems for ad hoc networks. In Pro-ceedings of ACM Mobihoc. 123–134.
MAINWARING, A., POLASTRE, J., SZEWCZYK, R., CULLER,D., AND ANDERSON, J. 2002. Wireless sensornetworks for habitat monitoring. In Proceedingsof ACM Wireless Sensor Networks and Applica-tions (WSNA). 88–97.
MARINA, M. AND DAS, S. 2002. Routing performancein the presence of unidirectional links in multi-hop wireless networks. In Proceedings of ACMMobihoc. 12–23.
MEESTER, R. AND ROY, R. 1996. Continuum Perco-lation. Cambridge University Press, Cambridge,U.K.
MICHAIL, A. AND EPHREMIDES, A. 2003. Energy-efficient routing for connection-oriented traf-fic in wireless ad hoc networks. Mobile Netw.Appl. 8, 5, 517–533.
MOAVENI-NEJAD, K. AND LI, X. 2005. Low-interference topology control for wirelessad hoc networks. Ad Hoc Sensor Netw.: Int. J.To appear.
MURTHY, S. AND GARCIA-LUNA-ACEVES, J. 1996. Anefficient routing protocol for wireless networks.Mobile Netw. Appls. 1, 2, 183–197.
NARAYANASWAMY, S., KAWADIA, V., SREENIVAS, R., AND
KUMAR, P. 2002. Power control in ad hocnetworks: Theory, architecture, algorithm andimplementation of the compow protocol. In Pro-ceedings of European Wireless. 156–162.
PALMER, E. 1985. Graphical Evolution. John Wileyand Sons, New York, NY.
PANCHAPAKESAN, P. AND MANJUNATH, D. 2001. On thetransmission range in dense ad hoc radio net-works. In Proceedings of IEEE Signal ProcessingCommunication (SPCOM).
PAPADIMITRIOU, I. AND GEORGIADIS, L. 2004. Energy-aware broadcast trees in wireless networks. Mo-bile Netw. Appls. 9, 6, 567–581.
PEARLMAN, M., HAAS, Z., AND MANVELL, B. 2000. Us-ing multi-hop acknowledgements to discover andreliably communicate over unidirectional linksin ad hoc networks. In Proceedings of Wire-less Communications and Networking Confer-ence (WCNC). 532–537.
PENROSE, M. 1997. The longest edge of the ran-dom minimal spanning tree. Annals Appl.Probab. 7, 2, 340–361.
PENROSE, M. 1998. Extremes for the minimalspanning tree on normally distributed points.Advances Appl. Probab. 30, 628–639.
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

Topology Control in Wireless Ad Hoc and Sensor Networks 193
PENROSE, M. 1999a. On k-connectivity for a ge-ometric random graph. Rand. Struct. Al-gori. 15, 2, 145–164.
PENROSE, M. 1999b. A strong law for the largestnearest-neighbour link between random points.J. London Math. Soci. 60, 2, 951–960.
PENROSE, M. 1999c. A strong law for the longestedge of the minimal spanning tree. The AnnalsProbab. 27, 1, 246–260.
PHILIPS, T., PANWAR, S., AND TANTAWI, A. 1989. Con-nectivity properties of a packet radio networkmodel. IEEE Trans. Inform. Theo. 35, 5, 1044–1047.
PIRET, P. 1991. On the connectivity of radio net-works. IEEE Trans. Inform. Theo. 37, 5, 1490–1492.
POTTIE, G. AND KAISER, W. 2000. Wireless inte-grated network sensors. Comm. ACM 43, 5, 51–58.
PRAKASH, R. 2001. A routing algorithm for wire-less ad hoc networks with unidirectional links.ACM/Kluwer Wirel. Netw. 7, 6, 617–625.
RAJARAMAN, R. 2002. Topology control and rout-ing in ad hoc networks: A survey. SIGACTNews 33, 2, 60–73.
RAMANATHAN, R. AND ROSALES-HAIN, R. 2000. Topol-ogy control of multihop wireless networks usingtransmit power adjustment. In Proceedings ofIEEE Infocom 00. 404–413.
RAMASUBRAMANIAN, V., CHANDRA, R., AND MOSSE, D.2002. Providing a bidirectional abstraction forunidirectional ad hoc networks. In Proceedingsof IEEE Infocom. 1258–1267.
RAPPAPORT, T. 2002. Wireless Communications:Principles and Practice, 2nd Ed. Prentice Hall,Upper Saddle River, NJ.
RODOPLU, V. AND MENG, T. 1999. Minimum energymobile wireless networks. IEEE J. Select. AreasComm. 17, 8, 1333–1344.
ROYER, E., MELLIAR-SMITH, P., AND MOSER, L. 2001.An analysis of the optimum node density forad hoc mobile networks. In Proceedings of theIEEE International Conference on Communica-tions. 857–861.
SADLER, C., ZHANG, P., MARTONOSI, M., AND LYON,S. 2004. Hardware design experiences in ze-branet. In Proceedings of ACM SenSys. 227–238.
SANCHEZ, M., MANZONI, P., AND HAAS, Z. 1999. De-termination of critical transmitting range in adhoc networks. In Proceedings of Multiaccess, Mo-bility and Teletraffic for Wireless Communica-tions Conference.
SANTI, P. 2005. The critical transmitting range forconnectivity in mobile ad hoc networks. IEEETrans. Mobile Comput. 4, 3, 310–317.
SANTI, P. AND BLOUGH, D. 2002. An evaluation ofconnectivity in mobile wireless ad hoc networks.In Proceedings of IEEE Dependable Systems andNetworks (DSN). 89–98.
SANTI, P. AND BLOUGH, D. 2003. The critical trans-mitting range for connectivity in sparse wire-
less ad hoc networks. IEEE Trans. MobileComput. 2, 1, 25–39.
SANTI, P., BLOUGH, D., AND VAINSTEIN, F. 2001. Aprobabilistic analysis for the range assignmentproblem in ad hoc networks. In Proceedings ofACM Mobihoc. 212–220.
SCHWIEBERT, L., GUPTA, S., AND WEINMANN, J. 2001.Research challenges in wireless networks ofbiomedical sensors. In Proceedings of ACM Mo-bicom. 151–165.
SEADA, K., ZUNIGA, M., HELMY, A., AND KRISHNAMACHARI,B. 2004. Energy-efficient forwarding strate-gies for geographic routing in lossy wireless sen-sor networks. In Proceedings of ACM SenSys.108–121.
SEN, A. AND HUSON, M. 1996. A new model forscheduling packet radio networks. In Proceed-ings of IEEE Infocom. 1116–1124.
SONG, W., WANG, Y., LI, X., AND FRIEDER, O. 2004.Localized algorithms for energy efficient topol-ogy in wireless ad hoc networks. In Proceedingsof ACM MobiHoc. 98–108.
SRIVASTAVA, M., MUNTZ, R., AND POTKONJAK, M. 2001.Smart kindergarten: Sensor-based wireless net-works for smart developmental problem-solvingenvironments. In Proceedings of ACM Mobicom.132–138.
STEELE, J. 1988. Growth rates of euclidean mini-mal spanning trees with power weighted edges.Annals Probab. 16, 1767–1787.
STEERE, D., BAPTISTA, A., MCNAMEE, D., PU, C., AND
WALPOLE, J. 2000. Research challenges in en-vironmental observation and forecasting sys-tems. In Proceedings of ACM Mobicom. 292–299.
SZEWCZYK, R., MAINWAIRING, A., POLASTRE, J., AND
CULLER, D. 2004. An analysis of a large scalehabitat monitoring application. In Proceedingsof ACM SenSys. 214–226.
WAN, P., CALINESCU, G., LI, X., AND FRIEDER, O.2002. Minimum energy broadcasting in staticad hoc wireless networks. ACM/Kluwer Wirel.Netw. 8, 6, 607–617.
WAN, P. AND YI, C. 2004. Asymptotical criticaltransmission radius and critical neighbor num-ber for k-connectivity in wireless ad hoc net-works. In Proceedings of ACM MobiHoc. 1–8.
WANG, W., LI, X., MOAVENINEJAD, K., WANG, Y.,AND SONG, W. 2003. The spanning ratio of β-skeletons.
WANG, Y., LI, X., AND FRIEDER, O. 2002. Distributedspanners with bounded degree for wireless adhoc networks. Int. J. Found. Comput. Sci. To ap-pear.
WATTENHOFER, R., LI, L., BAHL, P., AND WANG, Y. 2001.Distributed topology control for power efficientoperation in multihop wireless ad hoc networks.In Proceedings of IEEE Infocom. 1388–1397.
WATTENHOFER, R. AND ZOLLINGER, A. 2004. Xtc: Apractical topology control algorithm for ad hocnetworks. In the 4th International Workshop on
ACM Computing Surveys, Vol. 37, No. 2, June 2005.

194 P. Santi
Algorithms for Wireless, Mobile, Ad Hoc and Sen-sor Networks (WMAN).
WIESELTHIER, J., NGUYEN, G., AND EPHREMIDES, A.2000. On the construction of energy-efficientbroadcast and multicast trees in wireless net-works. In Proceedings of IEEE Infocom. 585–594.
XUE, F. AND KUMAR, P. 2004. The number of neigh-bors needed for connectivity of wireless net-works. ACM/Kluwer Wirel. Netw. 10, 2, 169–181.
YI, C. AND WAN, P. 2005. Asymptotic criticaltransmission ranges for connectivity in wire-
less ad hoc networks with bernoulli nodes.In Proceedings of IEEE Wireless Communica-tions and Networking Conference (WCNC) Toappear.
YI, C., WAN, P., LI, X., AND FRIEDER, O. 2003. Asymp-totic distribution of the number of isolated nodesin wireless ad hoc networks with bernoullinodes. In Proceedings of IEEE Wireless Commu-nications and Networking Conference (WCNC).1585–1590.
YUKICH, J. 2000. Asymptotics for weighted mini-mal spanning trees on random points. StochasticProc. Appl. 85, 123–128.
Received April 2003; revised December 2004; accepted August 2005
ACM Computing Surveys, Vol. 37, No. 2, June 2005.