Embed Size (px)
Citation preview

Together or Alone: Detecting Group Mobility with Wireless Fingerprints
Gürkan SOLMAZ and Fang-Jing WU
NEC Laboratories Europe, CSST group,
Heidelberg, Germany
24 May 2017
This work has received funding from the European Union’s Horizon 2020 research and innovation programme within the project “Worldwide Interoperability for Semantics IoT” under the grant agreement No 723156. Responsibility for the information and views set out in this document lies entirely with the authors.
2 © NEC Europe Ltd. 2016
Motivation
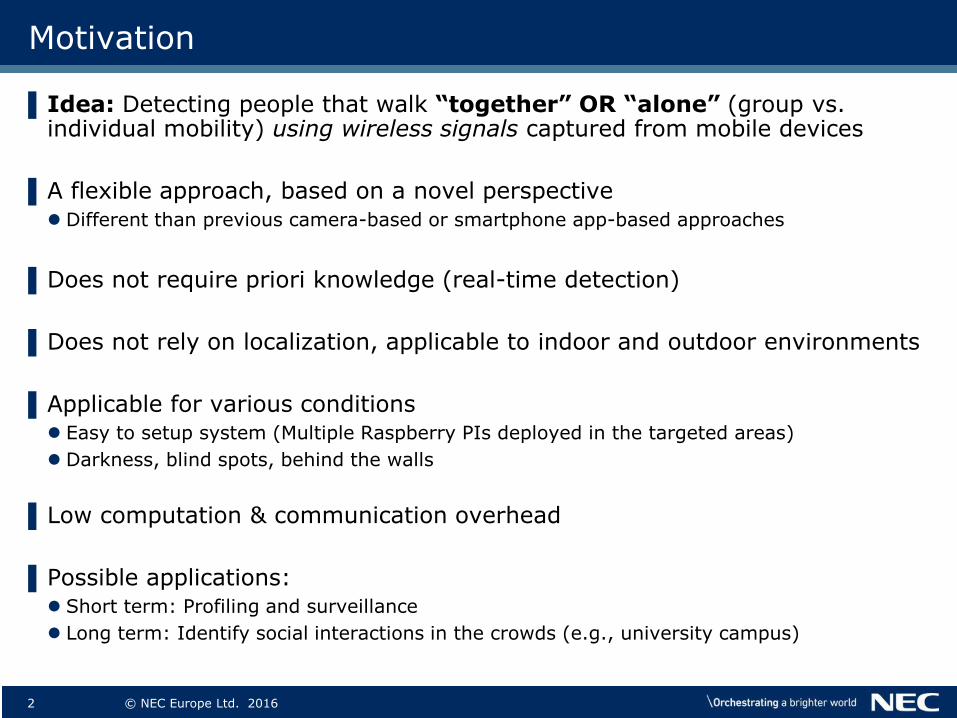
▌Idea: Detecting people that walk “together” OR “alone” (group vs. individual mobility) using wireless signals captured from mobile devices
▌A flexible approach, based on a novel perspective
Different than previous camera-based or smartphone app-based approaches
▌Does not require priori knowledge (real-time detection)
▌Does not rely on localization, applicable to indoor and outdoor environments
▌Applicable for various conditions Easy to setup system (Multiple Raspberry PIs deployed in the targeted areas)
Darkness, blind spots, behind the walls
▌Low computation & communication overhead
▌Possible applications: Short term: Profiling and surveillance
Long term: Identify social interactions in the crowds (e.g., university campus)

3 © NEC Europe Ltd. 2016
Targeted environments
▌The idea is applicable to both indoor and outdoor environments
▌Initially we targeted office environment for easy & longer term experimenting
▌Possible outdoor environments:
Streets, city squares
Leisure areas (parks in a city)
Ski resort
Theme parks
▌Indoor environments:
Airports
Shopping malls
Train stations
Stadiums

4 © NEC Europe Ltd. 2016
System design (1/2)
▌Easy to setup system
▌Can be fed with extra learning (e.g., by camera) for calibration in specific environments

5 © NEC Europe Ltd. 2016
System design (2/2)
▌We implemented a beacon based sniffing system as a prototype for opt-in data collection
▌Design is applicable to the Wi-Fi-based solutions
Wireless sniffers
Beacons carried
by humans
Back-end server
Network gateway

6 © NEC Europe Ltd. 2016
Method (1/2)
Raw data Aggregated (5s)
Extracted signals

7 © NEC Europe Ltd. 2016
▌Movement status (Dynamic vs. Static) based on sniffer fingerprints
𝑆 ordered list of sniffers for person 𝑃 at time interval 𝑇
𝑓 outputs the first 𝑘 element of the list (1 ≤ 𝑘 ≤ 𝑛, 𝑛 number of sniffers)
▌Space correlation between two people 𝑃𝑖 , 𝑃𝑗
▌Dynamic status & correlation group mobility !
Method (2/2)

8 © NEC Europe Ltd. 2016
Experimental setup
▌ Controlled experiment for collecting ground truth 10 beacons carried together
▌ Real-world experiment in the office environment Bluetooth data collected from 10 participants for 2 weeks
2 participants carried 2 beacons at the same time for reliability & consistency

9 © NEC Europe Ltd. 2016
Experimental study – controlled experiment
▌Aggregated results from 3 randomly selected beacons
▌All pairs have on average (99.4%) similarity to each other
Beacon 1 Beacon 4 Beacon 9
Wireless fingerprints similarity

10 © NEC Europe Ltd. 2016
Experimental study – group mobility detection
▌4 group movements detected for all 10 beacons
▌300 alone walks, 20 walks by groups of size 2 in one day
▌Group sizes of 2, 3, 4, 5, and 6
▌About 2 minutes needed to compute one day
2 weeks 1 day 10 beacons

11 © NEC Europe Ltd. 2016
Experimental study – reflections
▌ People working in the same office room tend to walk together
▌ Only exception: External member 𝑃6 tends to walk with 𝑃1, 𝑃2, 𝑃3 (e.g., going to lunch together)
▌ Results of the “2 beacons”
On average 95.39% similarity score, %79 movement intersection
Movement intersections (incl. alone) Movement intersections (excl. alone)
12 © NEC Europe Ltd. 2016
This work has received funding from the European Union’s Horizon 2020 research and innovation programme within the project “Worldwide Interoperability for Semantics IoT” under the grant agreement No 723156. Responsibility for the information and views set out in this document lies entirely with the authors.
Questions?



![Detecting Carbon Monoxide Poisoning Detecting Carbon ...2].pdf · Detecting Carbon Monoxide Poisoning Detecting Carbon Monoxide Poisoning. ... the patient’s SpO2 when he noticed](https://img.dokumen.tips/doc/110x75/5a78e09b7f8b9a21538eab58/detecting-carbon-monoxide-poisoning-detecting-carbon-2pdfdetecting-carbon.jpg)












![Detecting Carbon Monoxide Poisoning Detecting Carbon ...2].pdf · Detecting Carbon Monoxide Poisoning Detecting Carbon Monoxide Poisoning. Detecting Carbon Monoxide Poisoning C arbon](https://img.dokumen.tips/doc/110x75/5f551747b859172cd56bb119/detecting-carbon-monoxide-poisoning-detecting-carbon-2pdf-detecting-carbon.jpg)