Embed Size (px)
Citation preview

Public Choice103: 337–355, 2000.© 2000Kluwer Academic Publishers. Printed in the Netherlands.
337
The (un)predictability of primaries with many candidates:Simulation evidence∗
ALEXANDRA COOPER1 & MICHAEL C. MUNGER2
1Department of Political Science, University of North Carolina – Charlotte, Charlotte, NC28223;2Department of Political Science, Duke University, Durham, NC 27708-0204, USA
Accepted 10 September 1998
Abstract. It is common to describe the dynamic processes that generate outcomes in U.S.primaries as “unstable” or “unpredictable”. In fact, the way we choose candidates mayamount to a lottery. This paper uses a simulation approach, assuming 10,000 voters whovote according to a naive, deterministic proximity rule, but who choose party affiliationprobabilistically. The voters of each party then must choose between two sets of ten randomlychosen candidates, in “closed” primaries. Finally, the winners of the two nominations competein the general election, in which independent voters also participate. Thekey resultof thesimulations reported here is the complete unpredictability of the outcomes of a sequence ofprimaries: the winner of the primary, or the party’s nominee, varied as much as two standarddeviations from the median partisan voter. The reason is that the median, or any other measureof the center of the distribution of voters, is of little value in predicting the outcome ofmulticandidate elections. These results suggest thatwho runsmay have more to do withwhowinsthan any other consideration.
If more than two parties or candidates are expected, then the vote-maximizing positionis not close to your opponents, but well away from them. (Tullock, 1967: 55).
1. Introduction
Most major elections in the U.S. involve just two “serious” candidates. Atleast, the two major parties lend their names to only one candidate each,leaving only two candidates with a chance to win. Later, one of these twois elected. The choice of the party nominee appears very important. Yet weknow more about the mechanics of general election choices, where there are
∗ This paper was originally presented at the American Political Science Association meet-ings, August 1996, San Francisco, CA. The Authors thank John Aldrich, Paul-Henri Gurian,William Keech, Lawrence Kupper, William Mayer, George Rabinowitz, and Terry Sullivan forcomments and suggestions that improved the early versions of this paper. Any errors are oursalone, however.

338
but two candidates. Why this focus on what we understand, at the expense ofthe initial selection process?
A disturbing answer would be that there is just not much to know aboutthe first set of choices. From a purely analytic perspective, this is obviouslythe case: if there are three or more candidates, there is no single determinateequilibrium. There are multiple equilibrium patterns possible (see Denzau,Katz, and Slutsky, 1985; and Cox, 1987), but none of them are “convergent”,in the sense that we expect candidates to adopt positions toward the cen-ter of the distribution of voter ideal points. As Cox (1987: 86) points out:“electoral competition acts toensurethat extremist candidates will appear inmulticandidate contests”. (emphasis in original).
So, extremist candidates generallyappear; do theywin? Under what cir-cumstances? Theory doesn’t tell us much on this score. It is clearly possiblethat narrowing, or “winnowing”, the field of candidates is not systematic.It is common for the popular press to treat the nomination process as if itwere trivial (see for example, Childs, 1975; Cock, 1994; Schneider, 1995;and Smith, 1992). There are simple patterns: either front-runners always win,or the process is random. The academic literature offers different reasonsto be circumspect about the predictability of “winnowing”. Some scholarsfocus on the substance of the process of choosing nominees,1 while othersanalyze the underlying dynamics.2 In either case, the problem turns out tobe particularly intractable when the number of primary candidates is large orindeterminate. Much of what we do know about primary dynamics is basedon a very simplified setting, where there are only two candidates.
In this paper, we use simulation techniques to model primary contests withmany candidates. Assuming a population of 10,000 voters, whose partisan af-filiations are discrete random variables and who use a deterministic proximityrule to choose among candidates, we hold primary elections. In each primary,10 candidates run for nomination. Their positions are drawn from a normaldistribution centered at the median voter of each party. The primaries areclosed: only registered partisans may vote.
Our results are aptly summarized by Tullock’s statement quoted at theoutset: It is entirely possible for almost any candidate3 or position to win. Thekey to victory is, as Tullock notes, not where one locates, but how close onecandidate is to the other candidates. Parties in our simulations often nominatecandidates whose platforms are very different from the party median, and farfrom the median of the entire voting population. The results are little differentfrom what Brady (1994–5: 2) called “poorly designed lotteries”.
The paper proceeds as follows. Section 2 offers a brief review of therelevant literature on primary dynamics. The third section is an overviewof the simulation techniques to be used, including the identification of key

339
parameters that might be varied. Section 4 describes the actual simulations,including an overview of the simulated election results. Section 5 examinessome specific cases of the many-candidate location problem, using examplesfrom the simulations. Section 6 offers conclusions, including implications forreal-world primaries.
2. Previous literature and overview of the primary system
In this section, we consider the problem of many-candidate elections, whichgenerally have no predictable outcome. Worse, plurality rule elections havethe disconcerting property that many voters might place the “winner” last ina list of all candidates. If there are many candidates, and lots of disagreementamong voters, most may rank the winner below at least one other candidate.4
The obvious implication is that the power of the middle of the distributionof voters is stripped away, advantaging extreme candidates.5 Joslyn (1976),in his study of the 1972 Democratic nomination contest, concluded that the(relatively) extreme candidate George McGovern was selected over morecentrist Edmund Muskie at least partly because of the multicandidate natureof the primary process.6 It could be argued that problems with Muskie’sperceived lack of leadership, or McGovern’s strong liberal convictions, werethe deciding factors, of course. Still, Joslyn made estimates of the predictedoutcomes under other voting rules, and found that Muskie wonin every case:any rule other than plurality rule (proportional or not) would have resultedin a Muskie-Nixon election contest in 1972. In evaluating Joslyn’s argument,Mueller (1989: 122) points out:
One mightargue that Muskieshouldhave been the Democratic Party’snominee in 1972, and that, therefore, one of the other voting proceduresis preferable to the plurality rule. Muskie would have had a better chanceto defeat Nixon than McGovern, and McGovern’s supporters would prob-ably have preferred a Muskie victory to a McGovern defeat in the finalrunoff against Nixon. And, with the infinite wisdom of hindsight, one canargue that “the country” would have been better off with a Muskie victoryover Nixon. The rules of the game do matter. (Emphasis in original.)
The most directly relevant formal analysis of primaries is Brams (1978).Brams notes that moderate candidates can be squeezed out of the race in aseries of primaries, losing to more extreme candidates on either side,evenif voters themselves are concentrated at the location of the centrist candid-ate. Though this result seems obvious, this general dynamic of advantagingextremists may be the single most important factor determining the menu ofchoice for voters in the general election in November. After all, as Table 1

340
shows, real primaries in the U.S. states are often by plurality rule, winner-take-all.
3. Simulating primaries
The reason we use a simulation methodology to explore patterns of competi-tion in many-candidate elections is that little can be said about such electionsusing a traditional formal model, assuming vote-maximizing candidates.7 Itis well to summarize the logic of our simulations before we go into the actualmechanics of the modeling process.
3.1. Intuitive overview
Our model considers a general election between nominees of two parties,Lefts and Rights. Nominees are chosen inclosed(i.e., registered partisansonly) primaries. The electorate of 10,000 voters is divided into three par-tisan affiliations:Lefts, Rights,and Independents. There is single dimensionof choice, which we will call “ideology”. Ideological positions represent invoters’ minds a set of positions on all the various policies voters care about.Political competition, however, takes place only in the ideological space.8
Voters have (induced) ideal points on the ideological dimension; for conveni-ence we constrain ideal points to be whole numbers (1, 2, 3,...,100).
3.1.1. Partisan affiliationsPartisan affiliations are a function of the voter’s position, in analogy to theprobabilistic voting approach of Hinich (1977). All voters to the left of a(parametrically variable) point areLeft party members; all voters to the rightof some point areRights. Voters between the two extreme points are assignedparty affiliations probabilistically, as a function of a normal distribution, oneof whose arguments is the distance between the voters’ ideal points and theparametric value discussed above.Independentsvoters are the residual (i.e.,neitherLeftnor Rightpartisans).
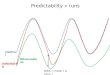
One possible configuration of party affiliation is shown in Figure 1. Herethe parameter values are 30 and 70: Anyone whose ideal point is equal to orless than 30 is aLeft for sure; ideal points larger than or equal to 70 imply thatvoter is aRight. The probability of being aLeftdeclines as voter ideal pointsare greater than 30; the probability of being aRight declines as ideal pointsare less than 70. Since the 10,000 voters areuniformly distributedfrom 1 to100, this means that 100 voters share each ideal point. Figure 1 depicts the

341
Table 1. Delegate assignment rules by STATE & PARTY
Allocation rules
State Republicans Democrats
Alabama Combination PR
Alaska n/a PR
Arizona n/a PR
Arkansas PR PR
California WTA PR
Colorado PR PR
Connecticut WTA PR
Delaware n/a PR
District of Columbia WTA PR
Florida WTA PR
Georgia WTA PR
Hawaii n/a PR
Idaho PR PR
Illinois n/a PR
Indiana WTA PR
Iowa n/a PR
Kansas WTA PR
Kentucky PR PR
Louisiana WTA PR
Maine n/a PR
Maryland WTA PR
Massachusetts PR PR
Michigan PR PR
Minnesota PR PR
Mississippi WTA PR
Missouri n/a PR
Montana n/a PR
Nebraska n/a PR
Nevada n/a PR
New Hampshire PR PR
New Jersey WTA PR
New Mexico PR PR
Mew York n/a PR
North Carolina PR PR
North Dakota PR n/a

342
Table 1. Continued.
Allocation rules
State Republicans Democrats
Ohio WTA PR
Oklahoma WTA PR
Oregon PR PR
Pennsylvania n/a PR
Rhode Island PR PR
South Carolina WTA PR
South Dakota PR PR
Tennessee PR PR
Texas WTA PR
Utah n/a PR
Vermont n/a PR
Virginia n/a PR
Washington PR n/a
West Virginia n/a n/a
Wisconsin WTA PR
Wyoming n/a PR
WTA = Winner-take-all.
PR = Proportional rule, where proportion of delegates equals proportion ofvotes.
n/a = These states use idiosyncratic rules, based oncaucuses. This usuallymeans voters vote for directly fordelegates, not for candidates.
relative population proportions of partisanship of the electorate, for each ofthe 100 ideal points.
3.1.2. Voter choiceWe make the simplest possible assumption for voter choice: vote for theclosest candidate. If two or more candidates are equally close, voters casta fraction – one half each if two candidates tie, one third among three, and soforth – of their vote for each of the nearest candidates.9
3.1.3. Who wins?Elections take place in two stages:
(1) Ten candidates (whose positions are selected randomly from the 0–69interval) run in theLeft primary. Another ten randomly positioned can-

343
didates (whose positions are selected randomly from the 31–100 interval)run in theRight primary. The candidate receiving the most votes in theclosed primaries is the nominee.10
(2) The Left nominee and theRight nominee face each other in a generalelection. All voters, regardless of partisan affiliation, vote in the generalelection.11
3.2. Specifics
3.2.1. Assumptions3.2.1.1. Voters i=1 to 10,000 are completely described by two character-istics:(1) Their ideal pointxiε{1,2, . . . ,100}(2) Theirpartisan affiliationpε{L,R, I}, corresponding toLeft, Right, or In-
dependent.Partisan affiliation is assigned according to the following rules:• If x i ≤ L then pi = L• If L < xi < R then P(pi = L) = 2(1− F(xi − L)σL
• If L < xi < R then P(pi = R) = 2(1− F(R− xi)σR)
• If L < xi < R then P(pi = I) = 1− P(pi = L)− P(pi = R)• If x i ≥ R then pi = R
Note: F[•] is the cumulative standard normal;L,R, σL, andσR are para-meters set for the simulation. The two “bar” variables are inflection points inthe c.d.f., and the “sigma” terms are measures of dispersion.
3.2.1.2. Candidates. Candidates are completely characterized by their par-tisan affiliation k∈ {L,R} and ideology. ForLeft candidates, the platformsare CLj ∈[0,69),j=1 to 10; forRightcandidates, CRj ∈ (31,100], j = 1 to 10.For each primary (one for each party in each simulation), candidate positionswere generated as a random variable, Cpj ∼ N(µp, σp),p ∈ {L,R}.
3.2.1.3. Candidate evaluations by voters.The ith voter’s problem is to casther vote for the “best” candidate, j*:
j∗(j ∈ {1 to 10}) is the candidate such that|xi − Cpj∗| ≤ |xi − Cpj|∀j 6= j∗Thus, her vote is Vij∗ = 1 if the best candidate is unique; Vij∗ = Vim∗1/2in the event of a tie between candidates cj and cm, and so on. For all othercandidates, Vij = 0.
3.2.1.4. Actual parameters. For these simulations, the parameters were definedas follows.

344
Figure 1. Probabilistic partisanship.

345
L = 30
σ L = 15
R = 70
σR = 15
µL = 21; note: if Cj<0 then Cj=0, if Cj>69 then Cj=69
µR = 79 note: if Cj<31 then Cj=31, if Cj>100 then Cj=100
σPL=σPR = 15
The random number generator we used was the RANNOR(seed) function inSAS, v.6.11.
4. Results
For each simulation of the 1,000 simulations performed for this study, wenoted the ideological position of theLeft andRight nominees, and the plat-form and party affiliation of the winning candidate in the general election.The determination of the winner in the general election is trivial, becausethe distribution of voters is uniform and all voters are assumed (at least inthis simulation) to vote.12 Consequently, whichever nominee is closer to thegrand median, 50, wins the election. There is no easy way to depict all 1000election simulations, so we have included (see Appendix) a small, randomlyselected, sample of 25 races to give the reader a better idea of how the processworked.
The most striking regularity is the lack of regularity in the results, foreither party. For both parties, winning candidates range from extremists (ideo-logical positions as low as 1 or as high as 34 for theLeftsand as low as 55.6or as high as 100 for theRights to centrists (values of 20, 21, and 22 forthe Lefts, 78, 79, and 80 for theRights). Candidates were generated usinga normal distribution centered on the party median (21 for theLeftsand 79for theRights), so that the candidates themselves are quite “centrist”, by partystandards. Of course, the stylized primary system used here forces a relativelyextreme outcome (the party medians are 21 for theLeft, and 79 for theRight).Still, the mean winning platforms are slightly more extreme than the medians,with the average position forLeftnominees being 16.01, andRightnominees79.55.
More interesting than the extent to which the average candidate does nordoes not approximate the party median is the large variance of the distributionof outcomes: 64 is the variance for theLeft Party, and 100 is the variancefor the Right party. An interesting single race is simulation #954,13, which

346
resulted in two extremist candidates being nominated: theLeft nominated acandidate with a platform of 2.65, and theRight chose a candidate with aplatform of 99.95. Since|2.65−50| < |99.95−50|, this means theLeftwinsthe general election.
Overall, the variance of the position of the general election winner isenormous: 729! This implies a standard deviation of 27, for a variable whichhas a range of only 0 to 100. Interestingly, for the particular set of simulationsconducted here, the mean of all winning platforms in the general election was54, which is not in the expected 49–51 interval. In words, then, the distribu-tion of general election outcomes is approximately unbiased (i.e., centeredon the grand median). But the dispersion is large, demonstrating extremenonconvergence.
It is useful to get a better visual grasp of the outcomes of these races. Fig-ure 2 shows the total number ofLeftprimary winners,Rightprimary winners,and general election winners by ten-increment units.
This figure makes clear the lack of any clear pattern in the primary results.As the chart shows, the spread of the outcomes is considerable. If anything,the distributions of both sets of primary results are multimodal. It wouldappear that we are finding something close to Brady’s “poorly designed lot-teries”. But why? As Tullock (1967) suggested, and as Brams (1978) showedmore formally, the answer lies in the complex locational competition in many-candidate elections. In the next section, we illustrate the logic of the problemwith two examples from our simulations.
5. Examples of many-candidate elections
In a multicandidate election, the location of any one office-seeker doesn’tmatter much. Regardless of where one candidate locates, if most others locatethere, too, they all lose. Conversely, no matter where a candidate locates, ifno one else is nearby, she has a chance to win if there are lots of candidatesand the outcome is determined by plurality rule.
But if any candidate can choose to run in any given primary, this meansthat the outcome is almost completely unpredictable, at least within the rangeof preferences represented in that party. On one hand, this opens opportun-ities for strategizing, if parties can run candidates who can ruin the chancesof otherwise powerful challengers. On the other hand, if candidates can runsimply by signing up and getting a few signatures, the party has lost control ofits own nomination. As Mueller pointed out, Democrats in 1972 might havepreferred a Muskie victory over Nixon to a McGovern loss to Nixon. But thechoice was not presented to them: McGovern was the nominee, and that wasthat.

347
Figure 2. Positions of winners.

348
Figure 3. Left party candidates and their locations in a simulation (example).
Figure 4. Right party candidates.
Either “centrism” or “extremism” are possible, when candidate locationsare selected randomly. For an example of an “extremist” outcome, considerthe case of aLeft primary with candidates located at the following positions:9.07, 10.13, 21.28, 22.10, 23.53, 24.86, 24.87, 40.34, 42.47, 57.81. Figure 3shows the position of these candidates along the ideological axis. The win-ning candidate is located towards the extreme left: 9.07. In this simulation,there were also candidates at 21, 22, and 23, and two candidates at 24, butthese five, any of whom could easily have won otherwise, split the centristvote. It turned out that theRightnominee was located at 84 in this election;of course, theRightwon handily, though either of the two centrists at 23 or27 would have won the general election could they only have gotten the nom-ination. This “extremist” outcome is therefore suboptimal for theLeft party,just as McGovern’s nomination was (arguably) regretted by the Democrats in1972.
A very different situation is depicted in Figure 4, showing candidates fora Rightprimary at positions 46.93, 52.77, 60.23, 61.16, 79.02, 79.72, 86.53,93.48, 95.08, 97.60. Here, there are two candidates located at positions nearor below 60, two nearly on the party median of 79, and three at position 86or higher. The candidate at position 79.02 wins the primary and, with theLeftprimary nominating a candidate at 6.06, goes on to win the general election.Thus, even when more than one candidate locates at or near the party median,a “centrist” candidate (by party standards) can win.

349
6. Discussion and conclusions
Mayer (1996) offers four key “regularities” that he claims make the out-comes of real primaries “somewhat predictable”. These can be summarisedas conditions on the nature of the candidacies and campaigns of those whorun. Likewise, Aldrich (1980a), Gurian (1993), and Brady (1993–4) outlineconditions that describes successful candidates. If the set of characteristicsthat make for “success” (i.e., winning the nomination) can be systematicallydescribed, of course, this means that primary outcomes are at least “somewhatpredictable”.
These conditions represent some important qualifications on the interpret-ations of the simulation model we have described above. We summarize themajor conditions as follows:
1. You have to announce your candidacy, and someone has to notice.Can-didates don’t just come from nowhere; they had organizations and war chestsand have managed to get on the ballot. Those who have not done this are not“candidates”, except in their daydreams. Thus, there are barriers to entry, andthose who pass these barriers have, in several important ways, shown theirfitness to run. Thus, it is quite possible that the random nature of candidatepositions we have posited is unrealistic. On the other hand, the characteristicsMayer talks about (ability to organize, to attract volunteers, and to project anattractive persona in television ads and media coverage) have little to do withideological position, particularly within a given party.
2. Front-runners tend to win, and momentum feeds on itself.Both the abstractdynamic models and Mayer’s description of the “resilience of front-runners”note that there seems to be “positive spiral” in a successful campaign. Thereare several possible explanations for this phenomenon, but the point is thatfront runners get that way because most people expect them to win. Thisexpectation may be a product of a dynamic process that rewards momentum,or it may simply be a result of the candidate’s position compared with hisopponents in the particular race in question. Mayer (1996: 57) notes:
[An early frontrunner is] likely to have a reasonably appealing message,a good campaign organization, and substantial campaigning skills of hisown. ..[N]one of these disappears just because a candidate loses a fewearly primaries or caucuses.
We have had little to say about campaign organization or demands ofsuccessive primaries in our simulation. But candidates who actually makeit on the ballot likely have all these things. The “appealing message” part of

350
Mayer’s formula is what we have looked at. The point we have tried to makeis that the appeal of a candidate’s message is measured, at least in part, bythe relative appeal of other candidates. This relative appeal is determined, inany given race, by which candidates decide to run. Consequently, it is quitepossible that front runners rarely lose, and yet the basic unpredictability ofthe process still applies.
3. You cannot win without lots of money.This point is very explicit in Mayer(1996), and implicit in both Aldrich (1980a, 1980b) and Gurian (1993). ButMayer (1996: 57) is highly critical of the existing literature, saying that the“obvious point” that money is a crucial ingredient in success “has generallyeluded most recent academic students of the presidential nomination pro-cess”. Mayer’s argument is that a successful candidate has to be “successfulat fundraising”; this is surely true. But the claim means less than it seems,because money is instrumental to victory, and the patterns of contributionsand expenditure must be fit into a large picture of political competition.
There are at least two ways of thinking of the constraining, and facilitating,role of money in primaries. One is the model of Aldrich and McGinnis (1989),who point out that parties may be able to constrain candidates, because con-tributions of both money and in-kind resources come disproportionately fromparty activists. Because activists have their own policy preferences, their in-fluence simultaneously decides theposition of the winning candidate andhow much money he has to spend. This is very different from saying thatone needs money to win, since there may be important tradeoffs betweenpositions candidates take to attract votes and the positions they take to attractcontributions.14
Another perspective, one that turns Aldrich and McGinnis (1989) on itshead, is Ferguson (1995) (see also Goldstein, 1978; and Gurian, 1990). Fer-guson argues that groups with concentrations of economic power can translatewealth into concentrated political power. Ferguson (1995: 383–384) calls theconstraints the need for money places on candidates the “Campaign CostCondition”. If this claim is true, then again the relative position of candid-ates is crucial. The candidates who have money will be those who, in termsof positional competition and competitive standing, best serve the goals ofcontributors.15
To summarize: Money alone will not make one win (witness Phil Gramand Steve Forbes in the 1996 Republican nomination competition). On theother hand, no one can win without lots of money. Our point is that theamount of money a candidate has is endogenously determined, based in parton relative spatial location.

351
The point of this extended summary of “other” candidate characteristicsthat we have omitted in our highly stylized analysis is this: “Other” character-istics are no more important than spatial location. Yet spatial competition inmany-candidate primaries has received little attention. The fact that it is verydifficult to say anything systematic, at least from a formal theory perspective,about many-candidate races is an indication that the simulation approach hassomething useful to teach us.
Our general point is that, if voters choose sincerely and parties simplyaccept the nominee who wins the primary, our general elections are an ap-pallingly inaccurate device for choosing the “best” candidate. One could cer-tainly counter that voters actually vote strategically, or that parties organizeto overcome the coordination problem of random selection. But if that istrue, why have the system we have? Either the system is a “poorly designedlottery”, or it is irrelevant because participants strategize. Regardless, usingsuch a mechanism to choose nominees reduces the legitimacy of the electoralprocess.
Notes
1. For a discussion of the process of choosing presidential nominees, see Epstein (1978),Felson and Sudman (1975), Keech and Matthews (1976), Payne, Marlier, and Baukus(1989), Smith (1992), and Mayer (1996).
2. For the dynamics of presidential nominations, see Brams (1978), Aldrich (1980a, 1980b),Bartels (1985, 1988), Gurian (1993), and Brady (1993–4).
3. We should say, “anyviable candidate”, where viable means someone with qualities ofleadership, organization, and reputation. To the extent that these qualities are uncorrelatedwith ideology, however, the basic logic of our claim stands.
4. Merril (1984), following Black (1958), defines a property he calls “Condorcet efficiency”as a means of comparing voting rules in many-candidate elections. He finds that pluralityrule performs relatively poorly in this setting, and that inefficiency increases rapidly as thenumber of candidates increases. Further evidence for the relative inefficiency of pluralityrule is given in Merrill (1985), using a simulation technique in many ways similar to thatemployed here. Kellett and Mott (1977), based on the inconsistencies in plurality assign-ment rules, suggested that alternative mechanisms be considered whenever the number ofcandidates is large, or just indeterminate. For a review of the much larger literature onvoting rules, see Mueller (1989).
5. An alternate approach to spatial models, called “the directional theory of voting” (outlinedby Rabinowitz and Macdonald, 1989), offers an important, but very different, explanationfor why relatively “extreme” candidates might succeed.
6. Of course, in addition to the fact that, like other nomination candidates they may face anumber of competitors, presidential candidates must compete in the unusual institution theprimaryseason– a series of contests. The impact of that season lies beyond the scope ofthis paper, which addresses only single, decisive primaries whose outcome is determinedby plurality rule.
7. Gurian (1993: 117) justifies the simulation approach for a similar reason:

352
. . . game theory seems inappropriate for modeling multicandidate campaigns. ..[G]iventhe number of candidates involved, their varying motivations, the variety of rules andprocedures, differences across candidates, states, and time, varying levels of uncer-tainty and risk, as well as changing norms and circumstances, developing a full formalmodel of multicandidate nomination campaigns would at best be quite difficult.
8. For empirical evidence that complex policy debates can be depicted in a highly reducedideological space, see Poole and Rosenthal (1984, 1991). For a theoretical argument,building on Downs (1957), for the value of ideology as an analytic concept, as well asadditional empirical evidence on voting behavior, see Hinich and Munger (1994). For adeviation of the “induced ideal point” concept, see also Enelow and Hinich (1984).
9. Since the “votes” are based on population proportions, this assumption is not unreason-able as an approximation, assuming the distance evaluation metric is reasonable in thefirst place. There may be a variety of other considerations relevant to the voter’s choice,however, as Crain, Deaton, and Tollison (1978) and other have argued. However, providedmacroeconomic performance and incumbency effects are orthogonal to ideology, ourprobabilistic assignment is unbiased as a representation of voter partisan s hip.
10. It is important to point out that, since there is but a single primary in each simulation foreach party, the WTA and PR rules are identical in their implications for the outcome.
11. Of course, in general elections for the Presidency in the U.S., votes are channeled throughthe electoral college, which has its own set of aggregation peculiarities. For an analysis,see Hinich, Ordeshook, and Michelson (1975), and Rabinowitz and Macdonald (1986).
12. In fact, of course, voting behavior and issue preferences in primaries are a separate field ofstudy in their own right. See Bartels (1985, 1988), Brady and Johnston (1987), Gopoian(1982), Moran and Fenster (1982), Norrander and Smith (1985), and Stone, Atkeson, andRapoport (1992).
13. The results of all simulations are available from the authors.14. This point has been made by a number of scholars, including Denzau and Munger (1986).15. For a more detailed formal analysis of the contribution decision based on ideological
position, see Hinich and Munger (1994: Ch. 9).
References
Aldrich, J. (1980a).Before the convention: Strategies and choices in presidential nominationcampaigns. Chicago: University of Chicago Press.
Aldrich, J. (1980b). A dynamic model of presidential nomination campaigns.AmericanPolitical Science Review74: 651–669.
Aldrich, J. and McGinnis, M. (1989). A model of party constraints on optimal candidatepositions.Mathematical and Computer Modeling12: 437–450.
Bartels, L.M. (1985). Expectations and preferences in presidential nominating campaigns.American Political Science Review79: 804–815.
Bartels, L.M. (1988).Presidential primaries and the dynamics of public choice. Princeton:Princeton University Press.
Black, D. (1958)The theory of committees and elections. Cambridge: Cambridge UniversityPress.
Brady, H. (1993–94). Knowledge, strategy, and momentum in presidential primaries.PoliticalAnalysis5: 1–38.

353
Brady, H. and Johnston, R. (1987). What’s the primary message: Horse race or issue journ-alism? In G. Orren and N. Polsby (Eds.),Media and momentum, 127–186. Chatham, NJ:Chatham House Publishers, Inc.
Brams, S.J. (1978).The presidential election game. New Haven: Yale University Press.Childs, R.S. (1975). Presidential primaries need overhaul.National Civic Review64: 14–20.Cook, R. (1994). Primary glut leads to hasty judgment.Congressional Quarterly Weekly
Report52: 142–143.Cox, G. (1987). Electoral equilibrium under alternative voting institutions.American Journal
of Political Science31: 82–108.Crain, M., Deaton, T. and Tollison, R. (1978). Macroeconomic determinants of the vote in
presidential elections.Public Finance Quarterly6: 427–438.Denzau, A., Katz, A. and Slutsky, S. (1985). Multi-agent equilibria with market share and
ranking objectives.Social Choice and Welfare2: 37–50.Denzau, A. and Munger, M. (1986). Legislators and interest groups: How unorganized
interests get represented.American Political Science Review80: 89–106.Downs, A. (1957).An economic theory of democracy. New York: Harper and Row.Enelow, J. and Hinich, M. (1984).The spatial theory of voting: An introduction. New York:
Cambridge University Press.Epstein, L.D. (1978). Political science and presidential nominations.Political Science
Quarterly93: 177–195.Felson, M. and Sudman, S. (1975). The accuracy of presidential preference primary polls.
Public Opinion Quarterly39: 232–236.Ferguson, T. (1995).The investment theory of party competition and the logic of money-driven
political systems. Chicago: University of Chicago Press.Goldstein, J.H. (1978). The influence of money on the prenomination stage of the presidential
selection process: The case of the 1976 Election.Presidential Studies Quarterly8: 164–179.
Gopoian, J.D. (1982). Issue preferences and candidate choice in presidential primaries.American Journal of Political Science26: 523–546.
Gurian, P.-H. (1990). The influence of nomination rules on the financial allocations ofpresidential candidates.Western Political Quarterly43: 663–687.
Gurian, P.-H. (1993). Candidate behavior in presidential nomination campaigns: A dynamicmodel.The Journal of Politics55: 115–139.
Joslyn, R.A. (1976). The impact of decision rules in multicandidate campaigns: The case ofthe 1972 democratic presidential nomination.Public Choice25: 1–17.
Hinich, M. (1977). Equilibrium in spatial voting: The median-voter result is an artifact.Journal of Economic Theory16: 208–219.
Hinich, M. and Munger, M. (1984).Ideology and the theory of political choice. New York:Cambridge University Press.
Hinich, M., Ordeshook, P. and Michelson, R. (1975). The electoral college vs. a direct vote:policy bias, indeterminate outcomes and reversals.Journal of Mathematical Sociology4:3–35.
Keech, W. and Matthews, D. (1976).The party’s choice. Washington, DC: Brookings.Kellett, J. and Mott, K. (1977). Presidential primaries: Measuring popular choice.Polity 9:
528–537.Mayer, W.G. (1996). Forecasting presidential nominations. In W.G. Mayer (Ed.),In pursuit
of the White House: How we choose our presidential nominees. Chatham, NJ: ChathamHouse Publishers, Inc.

354
Merrill, S. (1984). A comparison of efficiency of multicandidate electoral systems.AmericanJournal of Political Science47: 389–403.
Merrill, S. (1985). A statistical model for condorcet efficiency based on simulation underspatial model assumptions.Public Choice47: 389–403.
Moran, J. and Fenster, M. (1982). Voter turnout in presidential primaries: A diachronicanalysis.American Politics Quarterly10: 453–476.
Mueller, D. (1989).Public Choice II. New York: Cambridge University Press.Norrander, B. and Smith, G.W. (1985). Type of contest, candidate strategy, and turnout in
presidential primaries.American Politics Quarterly13: 28–50.Payne, J.G., Marlier, J. and Baukus, R.A. (1989). Polispots in the 1988 presidential primaries:
separating the nominees from the rest of the guys.American Behavioral Scientist32: 365–381.
Poole, K. and Rosenthal, H. (1984). U.S. presidential elections 1960–80: A spatial analysis.American Journal of Political Science28: 357–384.
Poole, K. and Rosenthal, H. (1991). Patterns of congressional voting.American Journal ofPolitical Science35: 228–278.
Rabinowitz, G. and Macdonald, S. (1986). The power of the states in U.S. presidentialelections.American Political Science Review80: 66–87.
Rabinowitz, G. and Macdonald, S. (1989). A directional theory of voting.American PoliticalScience Review83: 93–121.
Schneider, W. (1995). So much for the conventional wisdom.National Journal27: 1370–1371.Smith, C.A. (1992). The Iowa caucuses and super tuesday primaries reconsidered: How un-
tenable hypotheses enhance the campaign melodrama.Presidential Studies Quarterly. 22:519–529.
Stone, W.J., Atkeson, L.R. and Rapoport, R.B. (1992). Turning on or turning off?. Mobiliz-ation and demobilization effects of participation in presidential nominating campaigns.American Journal of Political Science36: 665–691.
Tullock, G. (1967).Towards a mathematics of politics. Ann Arbor: University of MichiganPress.

355
Appendix
App. 1. Appendix: 25 simulation examples
Left winner Right winner Winning platform General election
Election #1 17 77 77 Right
Election #2 13 68 68 Right
Election #3 30 69 69 Right
Election #4 27 79 27 Left
Election #5 26 77 26 Left
Election #6 30 90 30 Left
Election #7 06 80 80 Right
Election #8 14 74 74 Right
Election #9 17 75 75 Right
Election #10 07 83 83 Right
Election #11 05 86 86 Right
Election #12 11 88 88 Right
Election #13 28 70 70 Right
Election #14 24 85 24 Left
Election #15 31 86 31 Left
Election #16 15 83 83 Right
Election #17 25 82 25 Left
Election #18 09 94 09 Left
Election #19 21 69 69 Right
Election #20 18 77 77 Right
Election #21 12 84 84 Right
Election #22 28 84 28 Left
Election #23 10 87 87 Right
Election #24 19 69 69 Right
Election #25 26 88 26 Left
Mean 18.76 80.16 58.6 64%Right
SD 8.32 7.41 26.51