Embed Size (px)
Citation preview
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Continuous Collision Detection
David KnottCOMP 259 class presentation
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Interference vs. Collision
• Most algorithms that we think of as collision detection are actually Interference Detection♦ Interference Detection: Static setting♦ Collision Detection: Dynamic setting
• Most collision detection algorithms consist of repeated application of interference detection
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
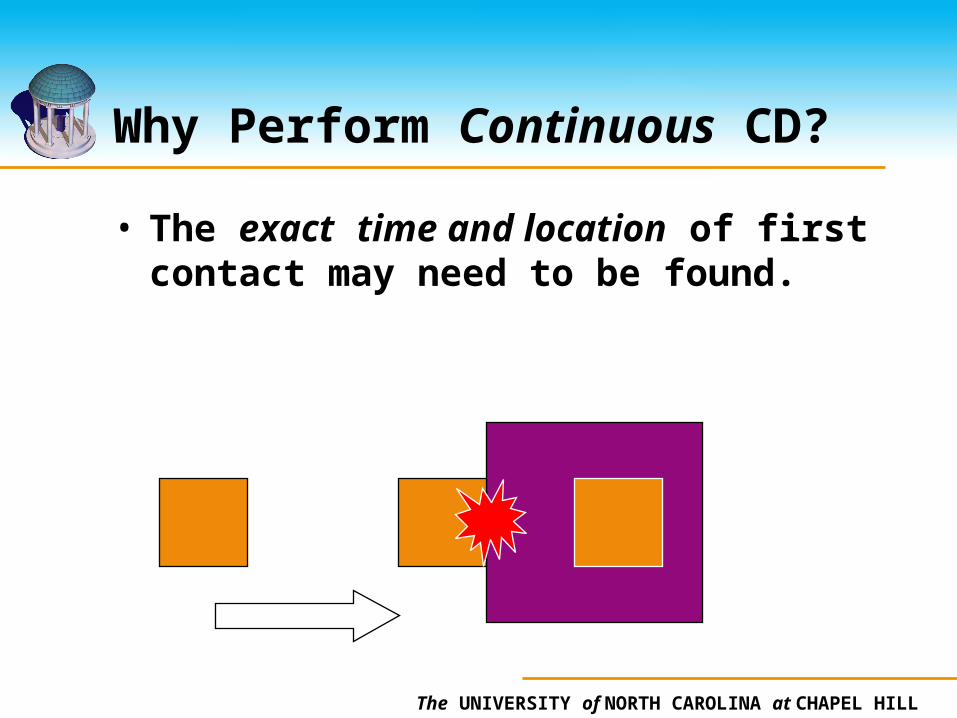
Why Perform Continuous CD?• The exact time and location of first
contact may need to be found.
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
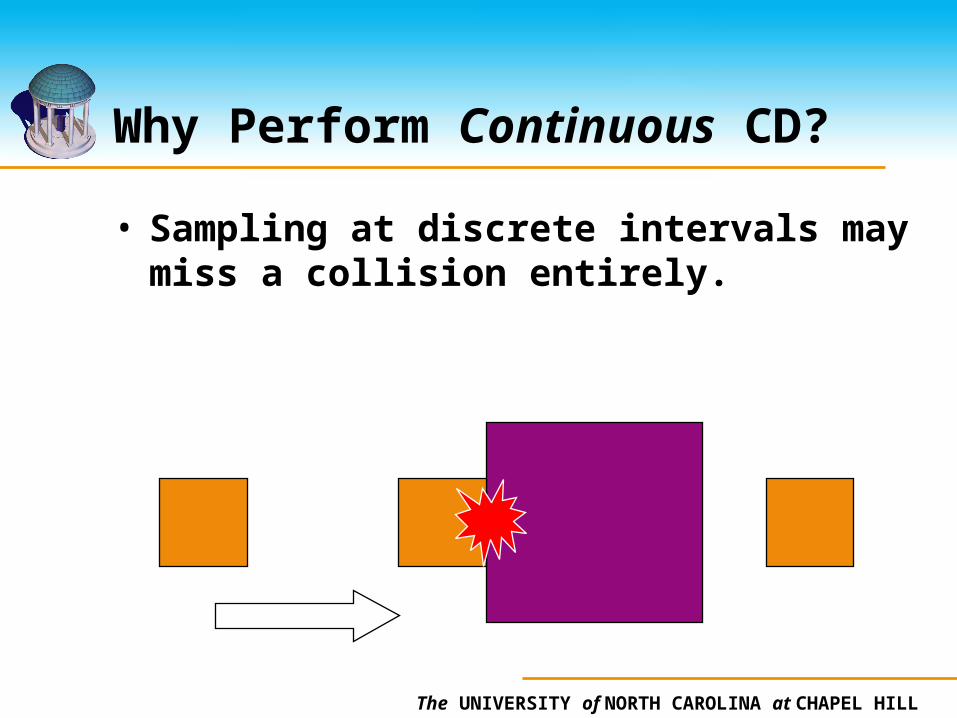
Why Perform Continuous CD?• Sampling at discrete intervals may
miss a collision entirely.
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
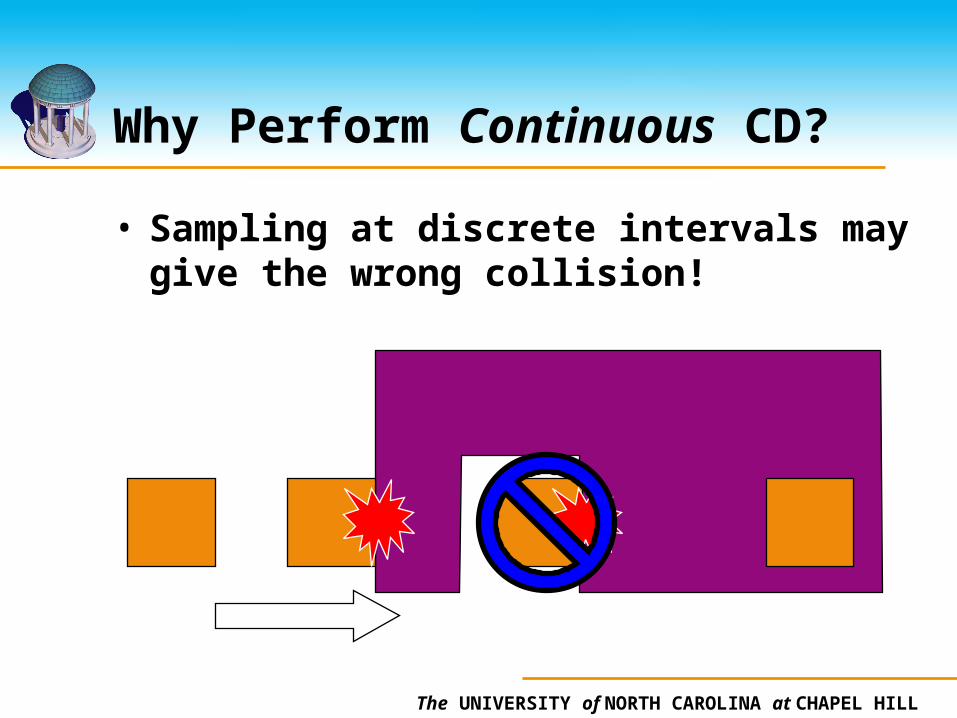
Why Perform Continuous CD?• Sampling at discrete intervals may
give the wrong collision!

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Why Perform Continuous CD?• Most animation systems use
backtracking methods♦ Try to find point of first contact by binary
search.♦ Subject to all problems from previous slides♦ Especially poor for non-solid objects (eg.
cloth)
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Types of motion
• Almost all CCD algorithms assume linear motion over a single time step
• Non-linear motion makes CCD computation much more expensive♦ True for both approximate and exact
methods
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Swept-volumes
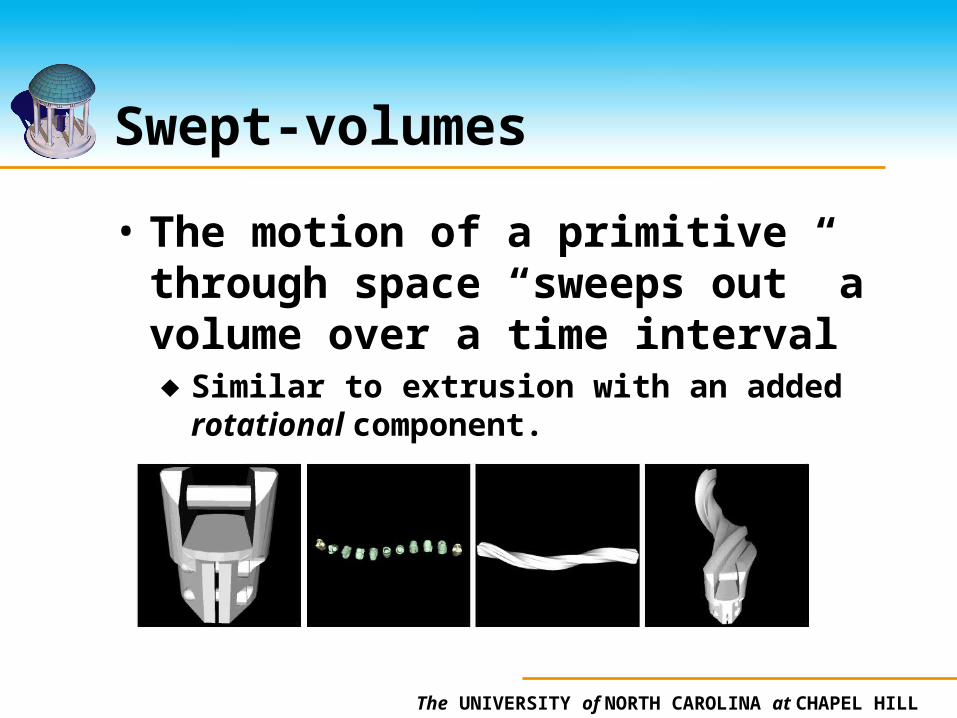
• The motion of a primitive through space “sweeps out” a volume over a time interval♦ Similar to extrusion with an added
rotational component.
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Swept Volumes
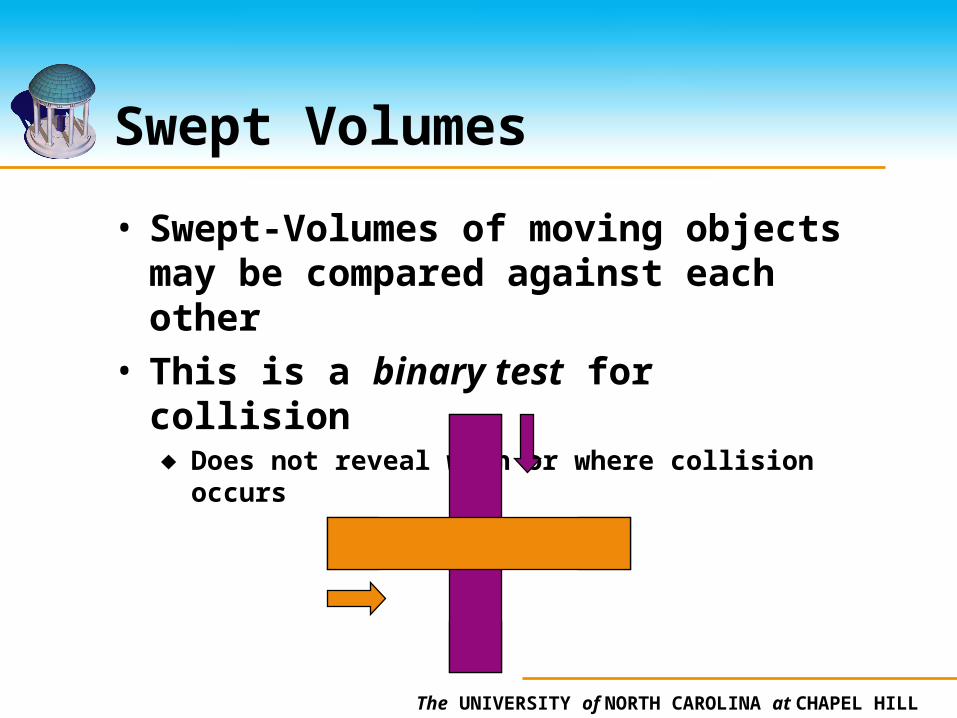
• Swept-Volumes of moving objects may be compared against each other
• This is a binary test for collision♦ Does not reveal when or where collision
occurs
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
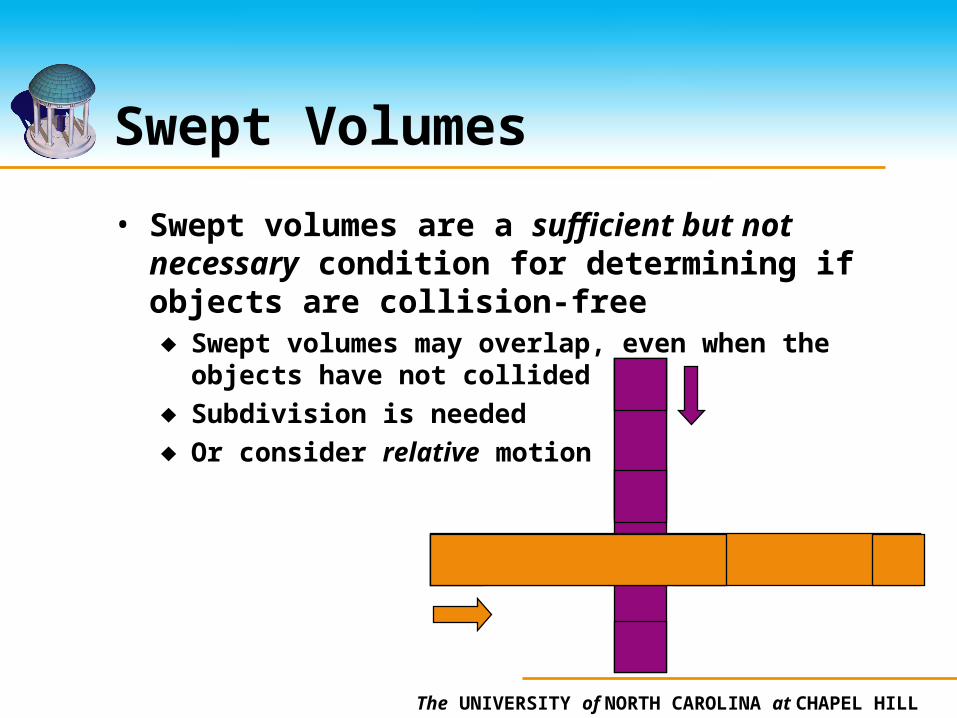
Swept Volumes
• Swept volumes are a sufficient but not necessary condition for determining if objects are collision-free♦ Swept volumes may overlap, even when the
objects have not collided♦ Subdivision is needed♦ Or consider relative motion

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Swept volumes in 3D space• 1D - line• 2D – prism
• 3D♦ becomes very complicated very
quickly
a
b
a'
b'
a a'
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Swept Volumes
• A object in n dimensions sweeps out a volume in n+1 dimensions
• These volumes are very expensive to compute.♦ Even harder with arbitrary rotations.

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Swept Volumes
Source: “Fast Swept Volume Approximation…” Y. Kim – ACM Solid Modelling 2003

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Approximate CCD
• Rough (conservative) CCD tests can be performed via bounding volumes of the swept volumes
• Hierarchies of bounding volumes may be constructed

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Convex Hulls of Swept Volumes
“A Safe Swept-Volume Approach to Collision Detection”A. Foisy & V. Hayward
Int. Symp. on Robotics Research 1994

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Convex Hulls of Swept Volumes• The AABB of a moving vertex
• Can find the convex hull of the AABBs of all vertices
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
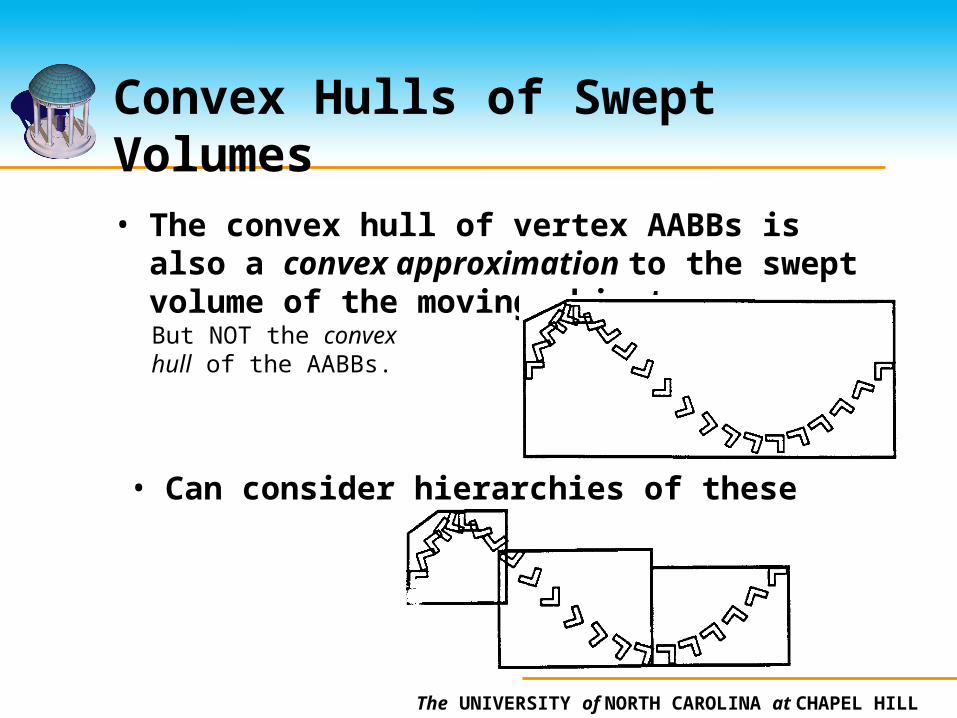
Convex Hulls of Swept Volumes• The convex hull of vertex AABBs is also
a convex approximation to the swept volume of the moving object
• Can consider hierarchies of these
But NOT the convex hull of the AABBs.

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Convex Hulls of Swept Volumes
• Can compute bounding boxes of the motion of individual vertices♦ From this, a convex approximation of
the object’s swept volume is straightforward
• If bounding volumes test positive, then individual polygon primitives must be tested♦ Similar to discrete bounding volumes

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Four-Dimensional Extrusion• Extrude an object from N-dimensional space into
N+1 dimensional space♦ eg. 2D object extruded through time to form 3D object
• “Collision Detection by 4D Intersection Testing…”♦ J. Cameron – IEEE Trans. Robotics & Automation -
1990

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Four-Dimensional Extrusion• Not the same as swept volumes♦ Swept volumes compute sweep of the
boundary of the surface♦ 4D extrusion computes sweep of volume♦ Overlap of extruded volumes is a
necessary and sufficient condition for collision.
• Conceptually nice• Implementation is exceedingly
difficult
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Exact CCD
• Swept volumes and bounding volumes will only report potential collisions.
• Still need to determine the exact time and point of collision.
• The types of objects that are being tested are usually polygonal♦ How can the exact tests be done for
polyhedra?
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
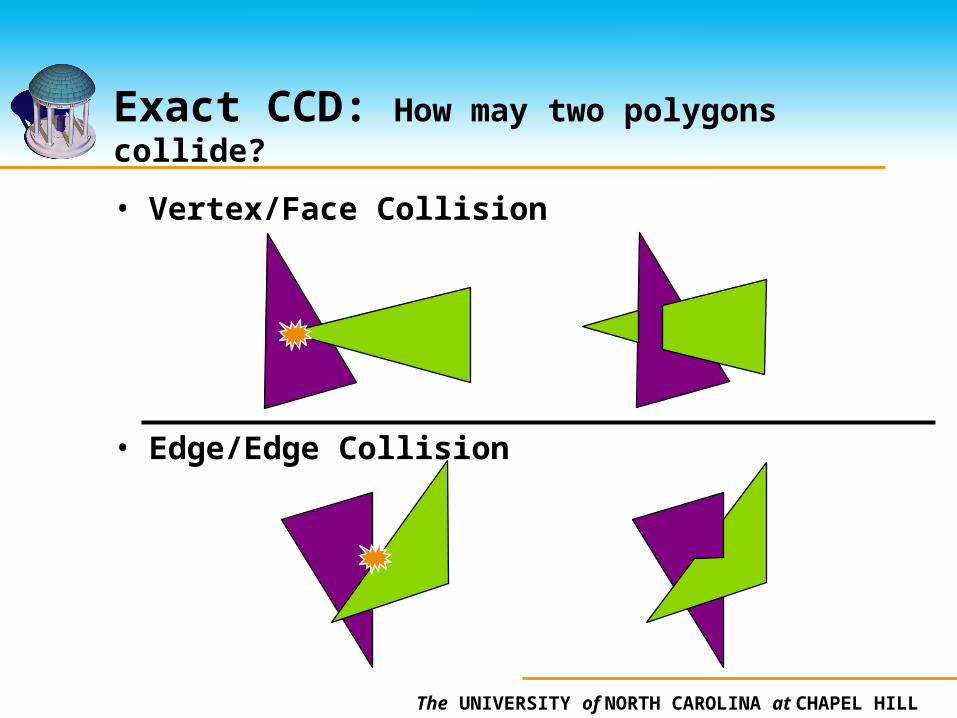
Exact CCD: How may two polygons collide?
• Vertex/Face Collision
• Edge/Edge Collision

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Exact CCD
• “Collision Detection for Moving Polyhedra”♦ J.Canny – IEEE Patt. Anal. and Mach. Int.
1986
• CCD for both the edge/edge and vertex/face tests reduces to a system of constraints and solving a polynomial of degree 5
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
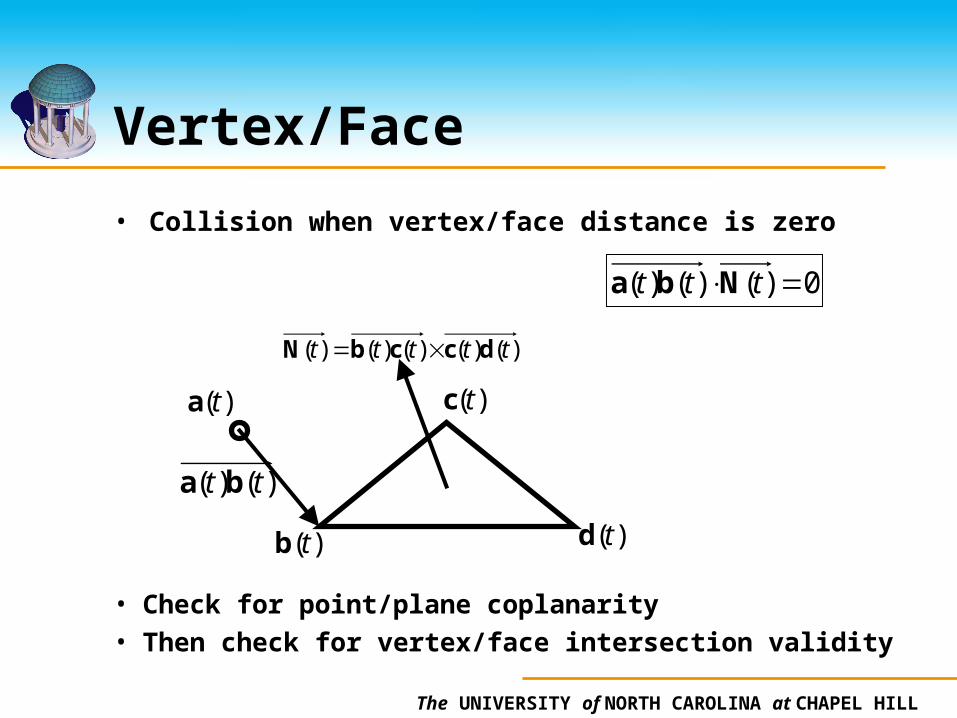
Vertex/Face
• Collision when vertex/face distance is zero
• Check for point/plane coplanarity• Then check for vertex/face intersection validity
)()()()()( ttttt dccbN
0)()()( ttt Nba
)(ta
)(tb
)(tc
)(td
)()( tt ba

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Edge/Edge
• Collision when edge/edge distance is zero
• Check for line/line coplanarity• Then check for edge/edge intersection validity
0)()()( ttt Nca)()()()()( ttttt dcbaN
)(ta
)(tb
)(tc)(td
)()( tt ca

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Edge/Edge and Vertex/Face• Note that both types of tests
are of the form:♦ Find when four points are co-planar
(continuous)♦ Check for validity at time of co-planarity
(in-plane distance computation)
• When two primitives have more than one contact during a single time step – choose the first one
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
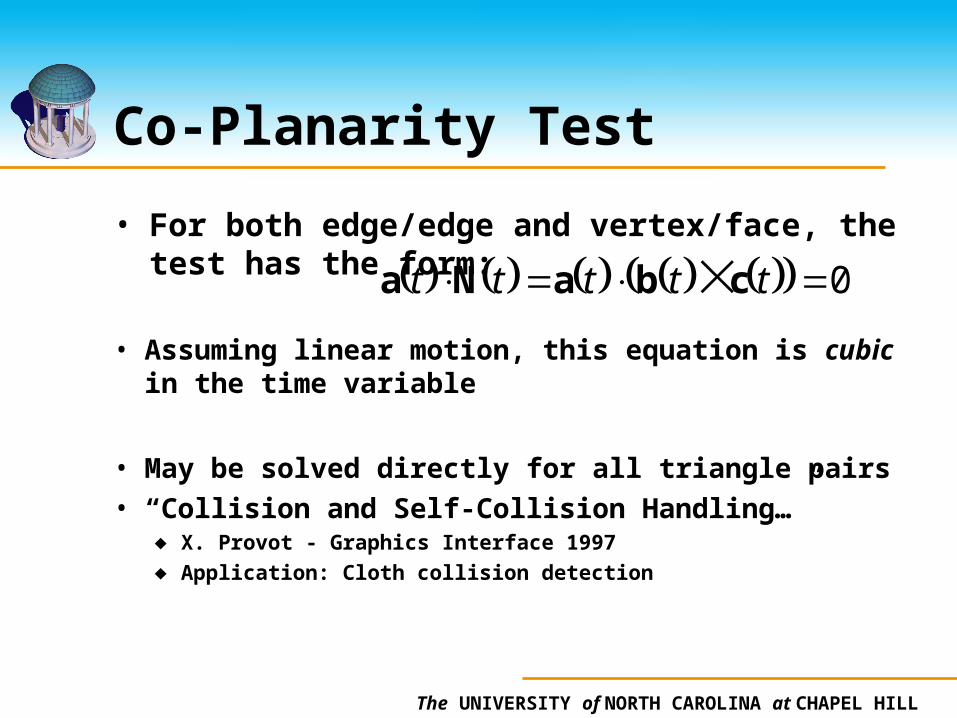
Co-Planarity Test
• For both edge/edge and vertex/face, the test has the form: 0 ttttt cbaNa
• Assuming linear motion, this equation is cubic in the time variable
• May be solved directly for all triangle pairs• “Collision and Self-Collision Handling…”
♦ X. Provot - Graphics Interface 1997♦ Application: Cloth collision detection
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Solving the Equations
• This could be solved directly. • Solving a cubic directly is difficult and
expensive.• Most implementations use bisection or
similar methods to find the roots of the equations.
• Is there a better way to do this?
0 ttttt cbaNa

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Interval Arithmetic
• Compute with intervals instead of numbers
• I = [a,b] = {x,axb}• Vectors have interval components• Given a function f(x), then computation
of f(I) results in another interval
• “Interval Analysis for Computer Graphics”• “Interval Methods for Multi-Point Collisions…”
♦ J. Snyder – SIGGRAPH 1992/1993
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
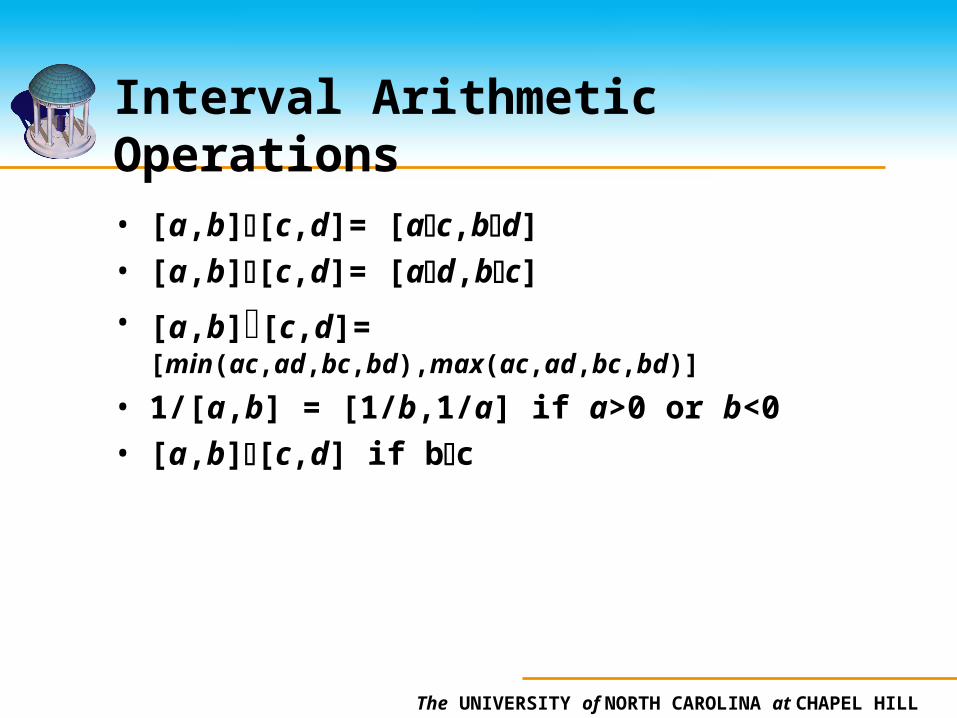
Interval Arithmetic Operations• [a,b][c,d]= [ac,bd]• [a,b][c,d]= [ad,bc]
• [a,b][c,d]= [min(ac,ad,bc,bd),max(ac,ad,bc,bd)]
• 1/[a,b] = [1/b,1/a] if a>0 or b<0• [a,b][c,d] if bc
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
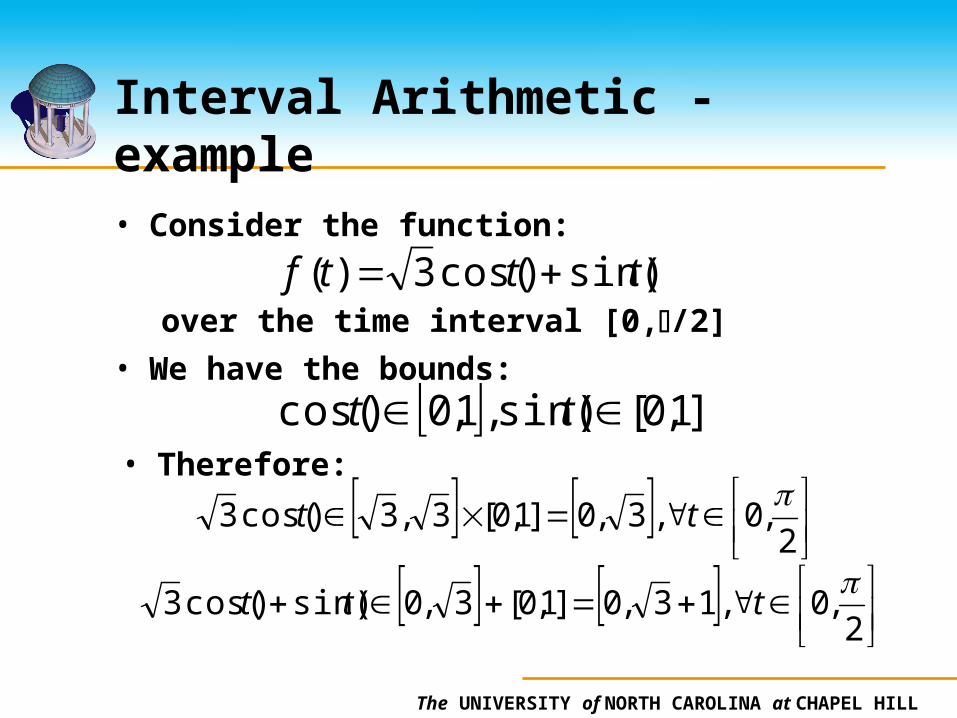
Interval Arithmetic - example• Consider the function:
)sin()cos(3)( tttf over the time interval [0,/2]
• We have the bounds: ]1,0[)sin(,1,0)cos( tt
• Therefore:
2,0,3,0]1,0[3,3)cos(3
tt
2,0,13,0]1,0[3,0)sin()cos(3
ttt

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Interval arithmetic
• Function bounds are not exact♦ But become tight as size of time
interval approaches zero

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Interval Arithmetic – solving• Given bounds function f(x)=0, with
interval I=[m,n] and tolerance
SOLVE( m, n )bounds = f([m,n])If bounds [0,1]
return(false)else
If width(bounds)< and m is a valid root return(true)else
if SOLVE( m, (m+n)/2 ) return(true)else return(SOLVE( (m+n)/2, n ) )

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Bounding Spheres
• Two spheres overlap when:
• c2 and c1 can be bounded♦ their limits all three dimensions are known
from the linearized equations of motion♦ so solve using interval arithmetic
2212
122112 rrrr cccc
1c2c
1r 2r

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Axis-Aligned Bounding Boxes
• Can find AABBs that bound an object over an interval♦ Linear motion of a vertex can be
bounded by an AABB♦ AABB of object is the combination of
all vertex AABBs.
• Use interval arithmetic to solve standard AABB test♦ AABB bounds are the input

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Oriented Bounding Boxes“Fast Continuous Collision
Detection Between Rigid Bodies”S. Redon, A. Kheddar, & S. CoquillartEurographics 2002

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Oriented Bounding Boxes• Tighter fit than AABBs
• Overlap test is based on concept of separating axes

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Oriented Bounding Boxes• What if the OBBs of objects are
animated?• This is easy to do for rigid objects
♦ Apply the object’s transformation to the OBB♦ Not the same as an OBB of the swept volume
• The static OBB overlap tests are relatively straightforward equations♦ They can be performed continuously as well!

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
OBB Test
• Define an OBB by three axes a1, a2, a3, with half-sizes a1, a2, a3, and center C
• An axis, x, separates two OBBs, A and B, if and only if:
Bi
i
Bi
Ai
i
Ai
BA aa axaxCCx
3
1
3
1
• There are fifteen such axes
31,31:,, jiBj
Ai
Bj
Ai aaaax
• If all fifteen tests fail, then the OBBs overlap

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
OBB Test – Example in 2D
A1a
A2a
B2a B
1a
AC
)(1BA CCa A
AAAAAA aa 212111 aaaa BAABAA bb 212111 aaaa
A
Bi
i
Bi
Ai
i
Ai
BA aa
1ax
axaxCCx
2
1
2
1
BC
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Continuous OBB Test
• The separating axis values, ai, ai, and C can be easily bounded.
• So the separation equations can be computed with interval arithmetic.
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Application - Cloth
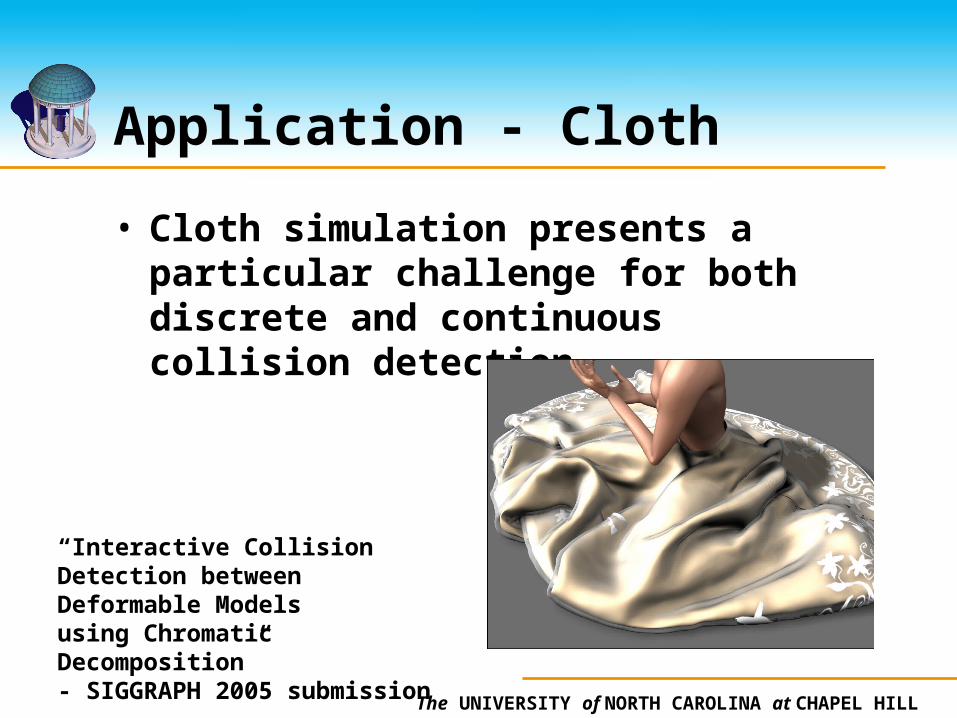
• Cloth simulation presents a particular challenge for both discrete and continuous collision detection
“Interactive Collision Detection between Deformable Modelsusing Chromatic Decomposition”- SIGGRAPH 2005 submission

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Cloth
• Cloth is not modeled as a solid♦ Usually a non-closed polygonal surface♦ Interpenetrations are very noticable♦ Discrete sampling is very likely to miss collisions

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Cloth
• Cloth is highly deformable• Cloth may exhibit self-collision
• Collision detection is the major bottleneck in cloth simulation
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Cloth CCD
• Typical approach is AABB, followed by edge/edge and vertex/face CCD for all polygon pairs♦ VERY expensive♦ Potentially hundreds of millions of pairs
• Swept volumes of polygonal primitives cannot be used♦ Adjacent polygons will be false positives

The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Our approach
• Perform swept-volume CCD, but ensure that adjacent polygons are not checked
• Accomplished through chromatic decomposition♦ Divide the cloth into disjoint sets of polygons♦ Check disjoint sets against each-other
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Our Approach
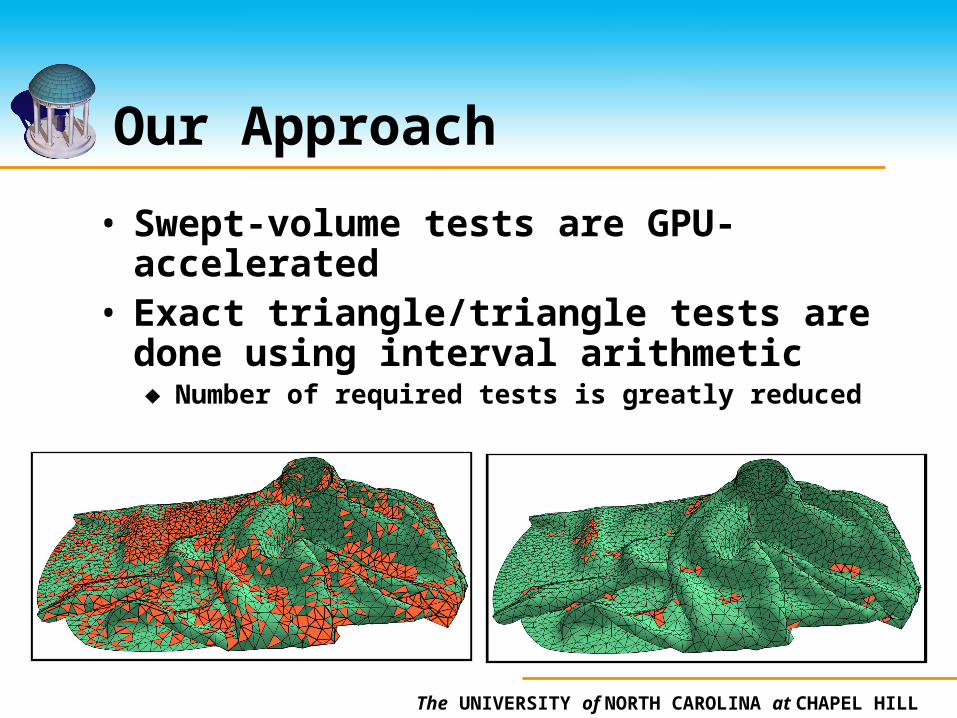
• Swept-volume tests are GPU-accelerated
• Exact triangle/triangle tests are done using interval arithmetic♦ Number of required tests is greatly reduced
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Other Issues in CCD
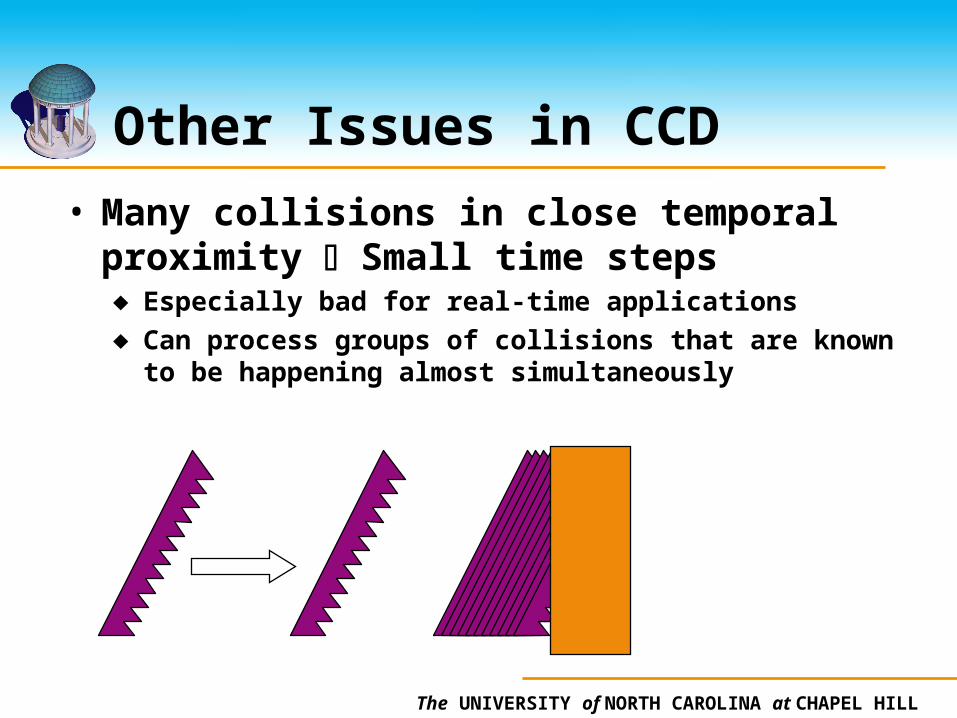
• Many collisions in close temporal proximity Small time steps♦ Especially bad for real-time applications♦ Can process groups of collisions that are known to
be happening almost simultaneously
The UNIVERSITY of NORTH CAROLINA at CHAPEL HILL
Other Issues in CCD
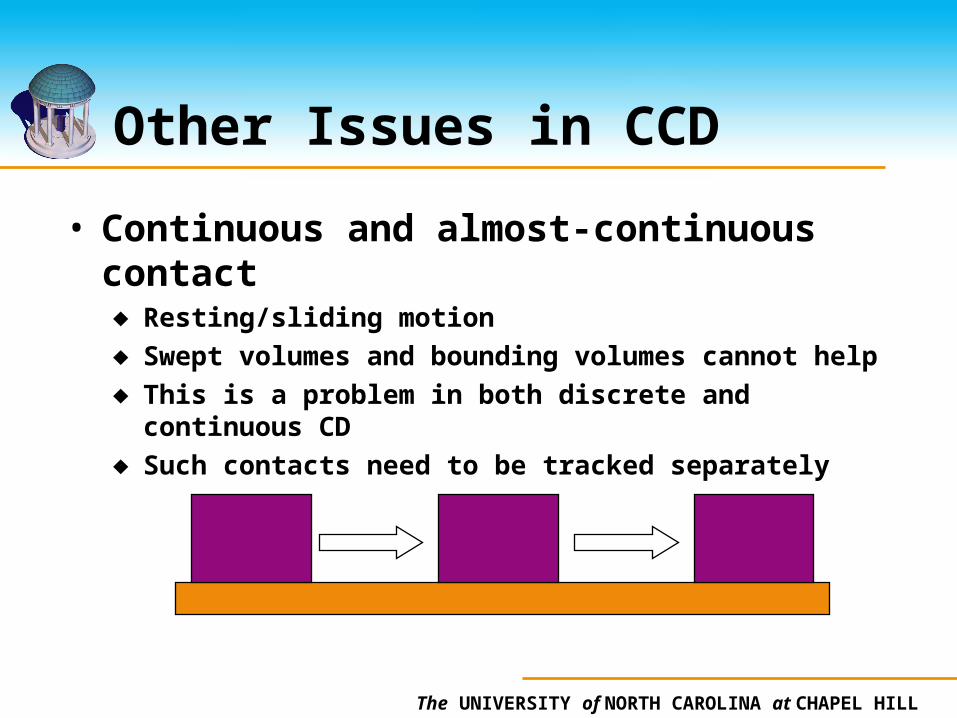
• Continuous and almost-continuous contact♦ Resting/sliding motion♦ Swept volumes and bounding volumes cannot help♦ This is a problem in both discrete and continuous
CD♦ Such contacts need to be tracked separately










![KNOTT-Components for Trailers 2010[1]](https://img.dokumen.tips/doc/110x75/577d20731a28ab4e1e92eb10/knott-components-for-trailers-20101.jpg)

















