Embed Size (px)
DESCRIPTION
line. point. The Fundamental Matrix F. Mapping of point in one image to epipolar line in other image x ! l ’ is expressed algebraically by the fundamental matrix F Write this as l ’ = F x Since x ’ is on l ’ , by the point-on-line definition we know that x ’ T l ’ = 0 - PowerPoint PPT Presentation
Citation preview

Computer Vision : CISC 4/689
The Fundamental Matrix F
• Mapping of point in one image to epipolar line in other image x ! l’ is
expressed algebraically by the fundamental matrix F
• Write this as l’ = F x• Since x’ is on l’, by the point-on-line definition we know that
x’T l’ = 0
• Substitute l’ = F x, we can thus relate corresponding points in the
camera pair (P, P’) to each other with the following:
x’T F x = 0
line point

Computer Vision : CISC 4/689
The fundamental matrix F (courtesy: Marc Pollefeys, UNC)
geometric derivation
xHx' π
x'e'l' FxxHe' π
mapping from 2-D to 1-D family (rank 2)Note: rank of skewsymmetric matrix is
even, so 2, so F’s rank is 2
Computer Vision : CISC 4/689
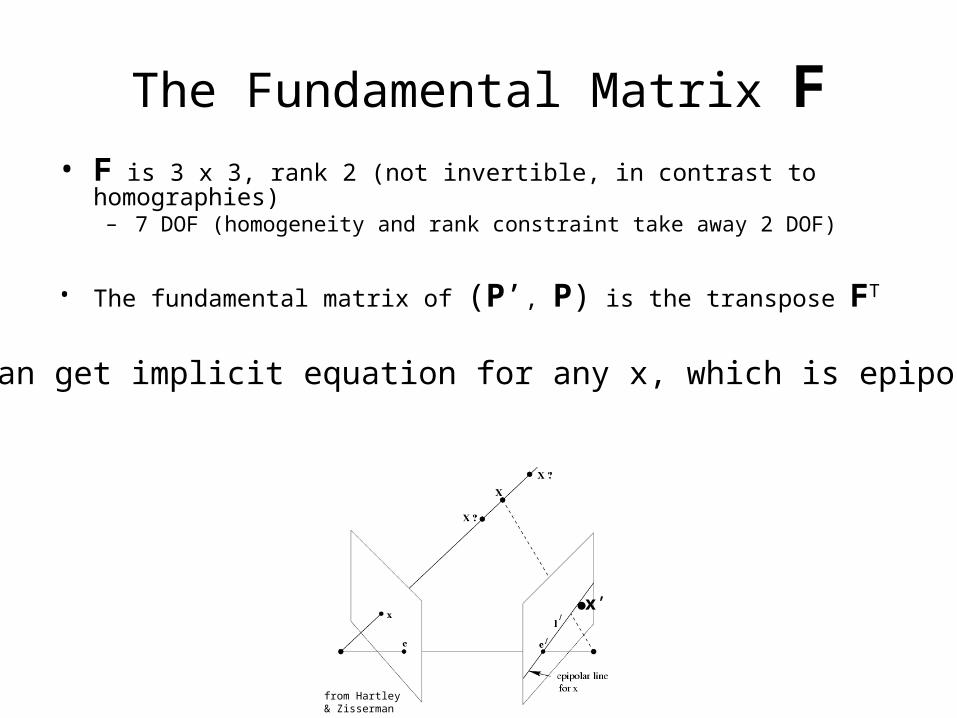
The Fundamental Matrix F• F is 3 x 3, rank 2 (not invertible, in contrast to homographies)
– 7 DOF (homogeneity and rank constraint take away 2 DOF)
• The fundamental matrix of (P’, P) is the transpose FT
from Hartley& Zisserman
x’
NOW, can get implicit equation for any x, which is epipolar line)

Computer Vision : CISC 4/689
Computing Fundamental Matrix
Fundamental Matrix is singular with rank 2
0uFuT
In principal F has 7 parameters up to scale and can be estimatedfrom 7 point correspondences
Direct Simpler Method requires 8 correspondences
(u’ is same as x in the prev. slide, u’ is same as x)
Computer Vision : CISC 4/689
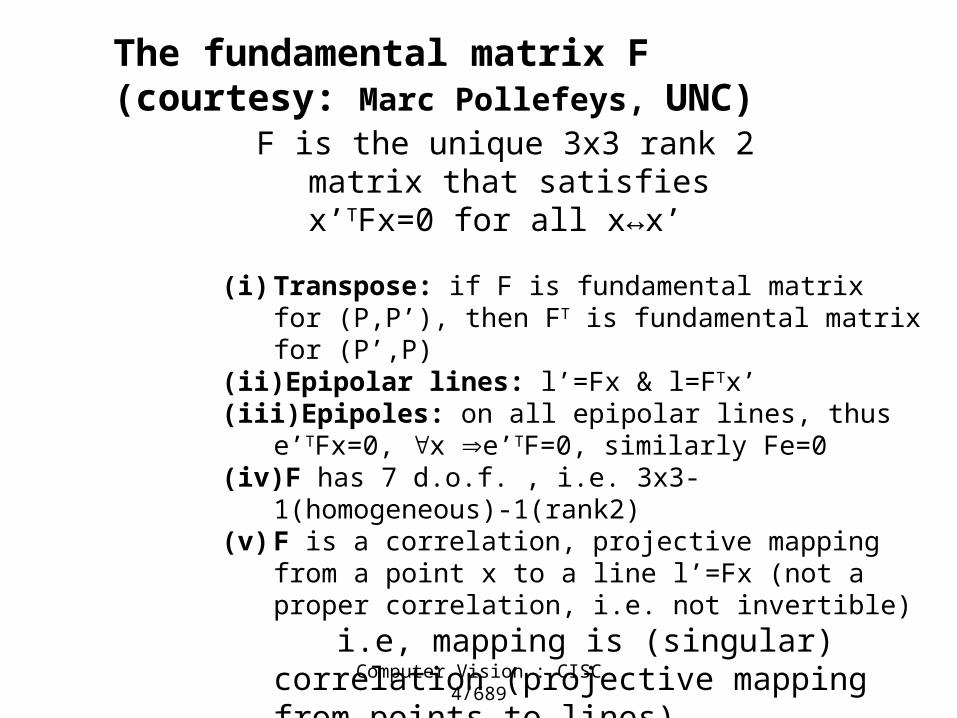
F is the unique 3x3 rank 2 matrix that satisfies x’TFx=0 for all x↔x’
(i) Transpose: if F is fundamental matrix for (P,P’), then FT is fundamental matrix for (P’,P)
(ii) Epipolar lines: l’=Fx & l=FTx’(iii) Epipoles: on all epipolar lines, thus e’TFx=0, x
e’TF=0, similarly Fe=0(iv) F has 7 d.o.f. , i.e. 3x3-1(homogeneous)-1(rank2)(v) F is a correlation, projective mapping from a point x to
a line l’=Fx (not a proper correlation, i.e. not invertible)
i.e, mapping is (singular) correlation (projective mapping from points to lines)
The fundamental matrix F (courtesy: Marc Pollefeys, UNC)

Computer Vision : CISC 4/689
Estimating Fundamental Matrix
0uFuT
Each point correspondence can be expressed as a linear equation
0
1
1
333231
232221
131211
v
u
FFF
FFF
FFF
vu
01
33
32
31
23
22
21
13
12
11
F
F
F
F
F
F
F
F
F
vuvvvvuuvuuu
The 8-point algorithm

Computer Vision : CISC 4/689
The 8-point Algorithm
Lot of squares, so numbers have varied range, from say 1000 to 1. So pre-normalize.And RANSaC!

Computer Vision : CISC 4/689
Computing F: The Eight-point Algorithm
• Input: n point correspondences ( n >= 8)– Construct homogeneous system Ax= 0 from
• x = (f11,f12, ,f13, f21,f22,f23 f31,f32, f33) : entries in F
• Each correspondence gives one equation
• A is a nx9 matrix (in homogenous format)
– Obtain estimate F^ by SVD of A
• x (up to a scale) is column of V corresponding to the least singular value
– Enforce singularity constraint: since Rank (F) = 2
• Compute SVD of F^
• Set the smallest singular value to 0: D -> D’
• Correct estimate of F :
• Output: the estimate of the fundamental matrix, F’
• Similarly we can compute E given intrinsic parameters
0lT
r pFp
TUDVA
TUDVF ˆ
TVUDF' '

Computer Vision : CISC 4/689
Locating the Epipoles from F
• Input: Fundamental Matrix F– Find the SVD of F– The epipole el is the column of V corresponding to the null singular
value (as shown above)– The epipole er is the column of U corresponding to the null singular
value
• Output: Epipole el and er
TUDVF
el lies on all the epipolar lines of the left image
0lT
r pFp
0lT
r eFp
F is not identically zero
True For every pr
0leF
pl pr
P
Ol Orel er
Pl Pr
Epipolar Plane
Epipolar Lines
Epipoles
Computer Vision : CISC 4/689
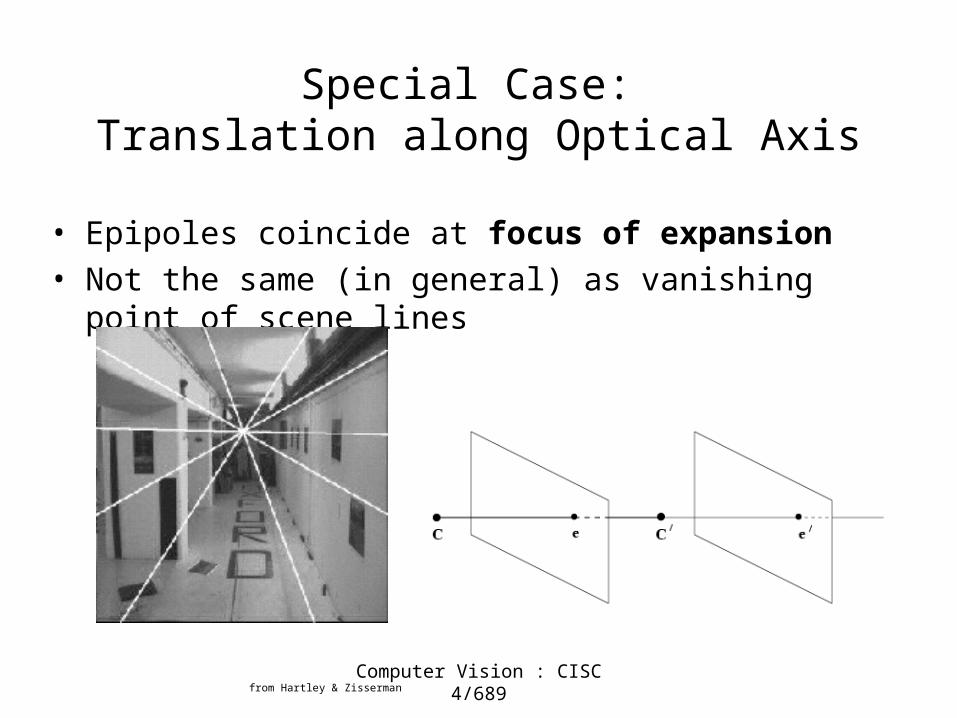
Special Case: Translation along Optical Axis
• Epipoles coincide at focus of expansion
• Not the same (in general) as vanishing point of scene lines
from Hartley & Zisserman
Computer Vision : CISC 4/689
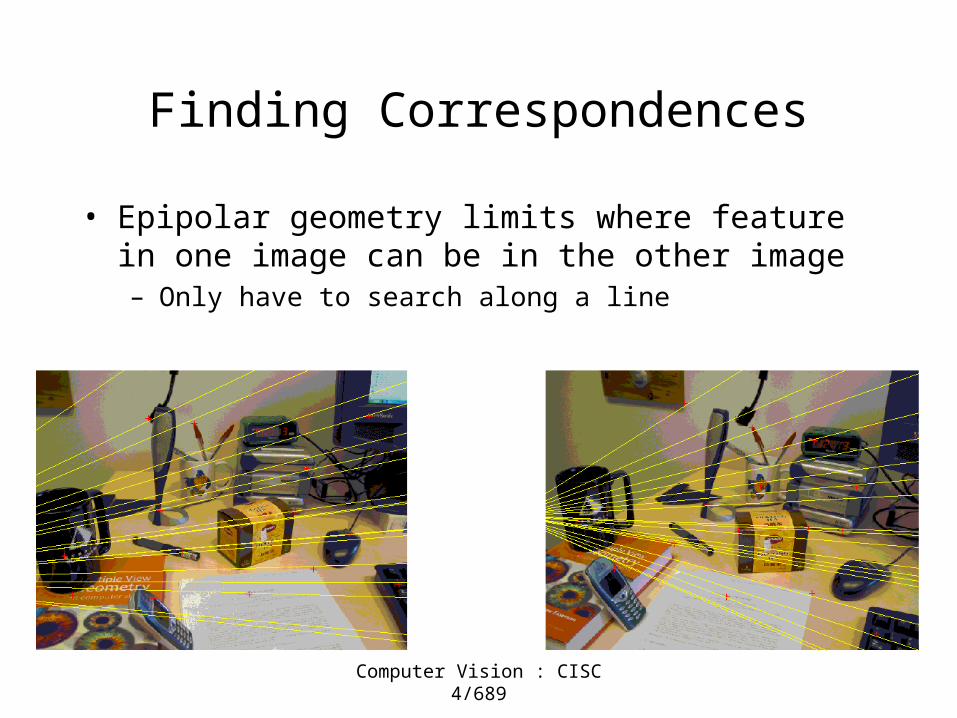
Finding Correspondences
• Epipolar geometry limits where feature in one image can be in the other image– Only have to search along a line
Computer Vision : CISC 4/689
Simplest Case
• Image planes of cameras are parallel.
• Focal points are at same height.
• Focal lengths same.
• Then, epipolar lines are horizontal scan lines.

Computer Vision : CISC 4/689
We can always achieve this geometry with image rectification
• Image Reprojection– reproject image planes onto common
plane parallel to line between optical centers• Notice, only focal point of camera really matters
(Seitz)

Computer Vision : CISC 4/689
Stereo Rectification
• Rectification – Given a stereo pair, the intrinsic and extrinsic parameters, find the image
transformation to achieve a stereo system of horizontal epipolar lines
– A simple algorithm: Assuming calibrated stereo cameras
p’lp’r
P
Ol Or
X’r
Pl Pr
Z’l
Y’l Y’r
TX’l
Z’r
Stereo System with Parallel Optical AxesEpipoles are at infinity
Horizontal epipolar lines

Computer Vision : CISC 4/689
Stereo Rectification
• Algorithm– Rotate both left and right
camera so that they share the same X axis : Or-Ol = T
– Define a rotation matrix Rrect for the left camera
– Rotation Matrix for the right camera is RrectRT
– Rotation can be implemented by image transformation
pl
pr
P
Ol Or
Xl
Xr
Pl Pr
Zl
Yl
Zr
Yr
R, T
TX’l
Xl’ = T_axis, Yl’ = Xl’xZl, Z’l = Xl’xYl’

Computer Vision : CISC 4/689
Stereo Rectification
• Algorithm– Rotate both left and right
camera so that they share the same X axis : Or-Ol = T
– Define a rotation matrix Rrect for the left camera
– Rotation Matrix for the right camera is RrectRT
– Rotation can be implemented by image transformation
pl
pr
P
Ol Or
Xl
Xr
Pl Pr
Zl
Yl
Zr
Yr
R, T
TX’l
Xl’ = T_axis, Yl’ = Xl’xZl, Z’l = Xl’xYl’

Computer Vision : CISC 4/689
Stereo Rectification
• Algorithm– Rotate both left and right
camera so that they share the same X axis : Or-Ol = T
– Define a rotation matrix Rrect for the left camera
– Rotation Matrix for the right camera is RrectRT
– Rotation can be implemented by image transformation
Zr
p’lp’r
P
Ol Or
X’r
Pl Pr
Z’l
Y’l Y’r
R, T
TX’l
T’ = (B, 0, 0),

Computer Vision : CISC 4/689Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923

Computer Vision : CISC 4/689Teesta suspension bridge-Darjeeling, India
Computer Vision : CISC 4/689Mark Twain at Pool Table", no date, UCR Museum of Photography

Computer Vision : CISC 4/689Woman getting eye exam during immigration procedure at Ellis
Island, c. 1905 - 1920 , UCR Museum of Phography

Computer Vision : CISC 4/689
Stereo matching
• attempt to match every pixel
• use additional constraints
Computer Vision : CISC 4/689
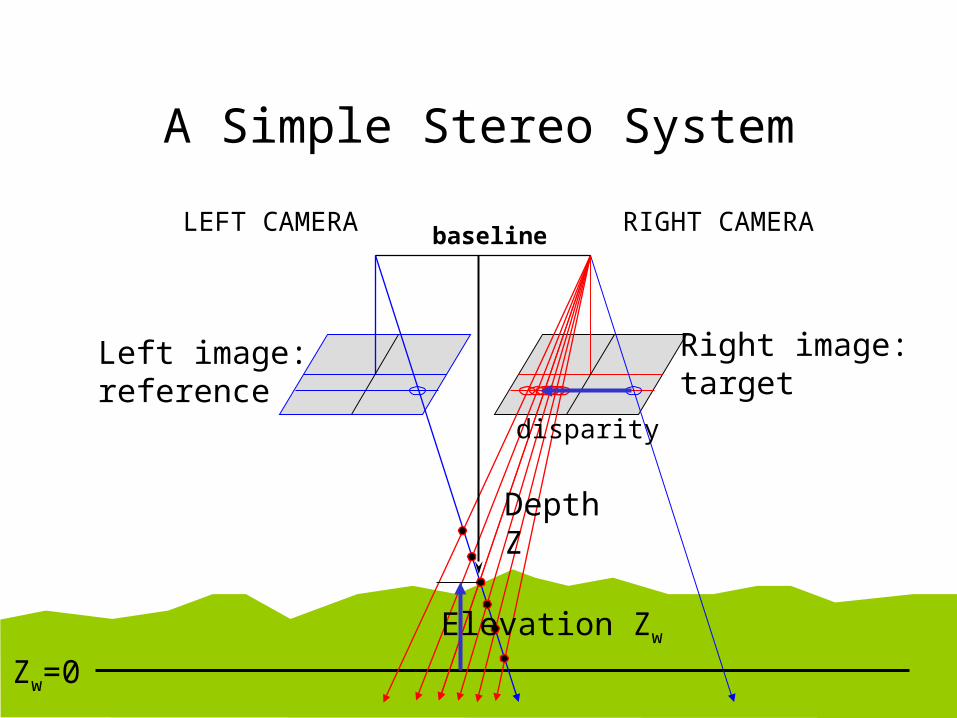
A Simple Stereo System
Zw=0
LEFT CAMERA
Left image:reference
Right image:target
RIGHT CAMERA
Elevation Zw
disparity
Depth Z
baseline

Computer Vision : CISC 4/689
Let’s discuss reconstruction with this geometry before correspondence, because it’s much easier.
OOll OOrr
PP
ppll pprr
TT
ZZ
xxll xxrr
ff
T T is the stereo baselineis the stereo baselined d measures the difference in retinal position between corresponding measures the difference in retinal position between corresponding pointspoints (Camps)
Then given Z, we can compute X and Y.
Disparity:
Similarity of triangles:Xl,f -> X,Zxl,yl=(f X/Z, f Y/Z)Xr,yr=(f (X-T)/Z, f Y/Z)d=xl-xr=f X/Z – f (X-T)/Z
( -ve, +ve, referprevious slide fig.)
X(T-X)
But moving toLeft camera makesIt –(T-X)

Computer Vision : CISC 4/689
Correspondence: What should we match?
• Objects?
• Edges?
• Pixels?
• Collections of pixels?
Computer Vision : CISC 4/689
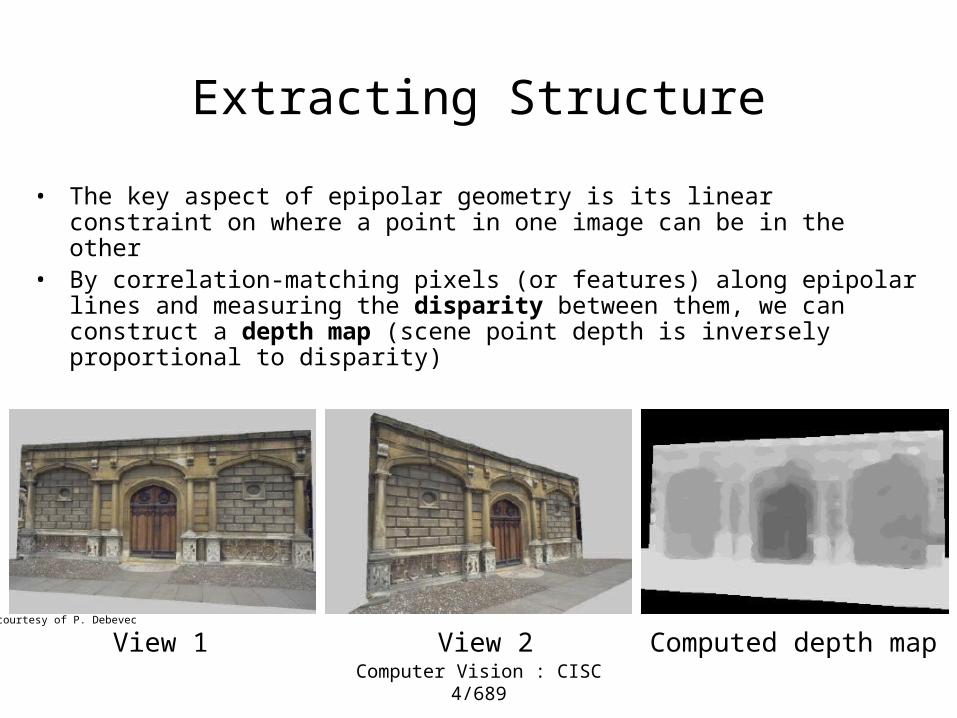
Extracting Structure
• The key aspect of epipolar geometry is its linear constraint on where a point in one image can be in the other
• By correlation-matching pixels (or features) along epipolar lines and measuring the disparity between them, we can construct a depth map (scene point depth is inversely proportional to disparity)
View 1 View 2 Computed depth mapcourtesy of P. Debevec

Computer Vision : CISC 4/689
Correspondence: Photometric constraint
• Same world point has same intensity in both images.– Lambertian fronto-parallel
– Issues:
• Noise
• Specularity
• Foreshortening

Computer Vision : CISC 4/689
Using these constraints we can use matching for stereo
For each epipolar lineFor each pixel in the left image
• compare with every pixel on same epipolar line in right image
• pick pixel with minimum match cost
• This will never work, so:
Improvement: match windows
(Seitz)
Computer Vision : CISC 4/689
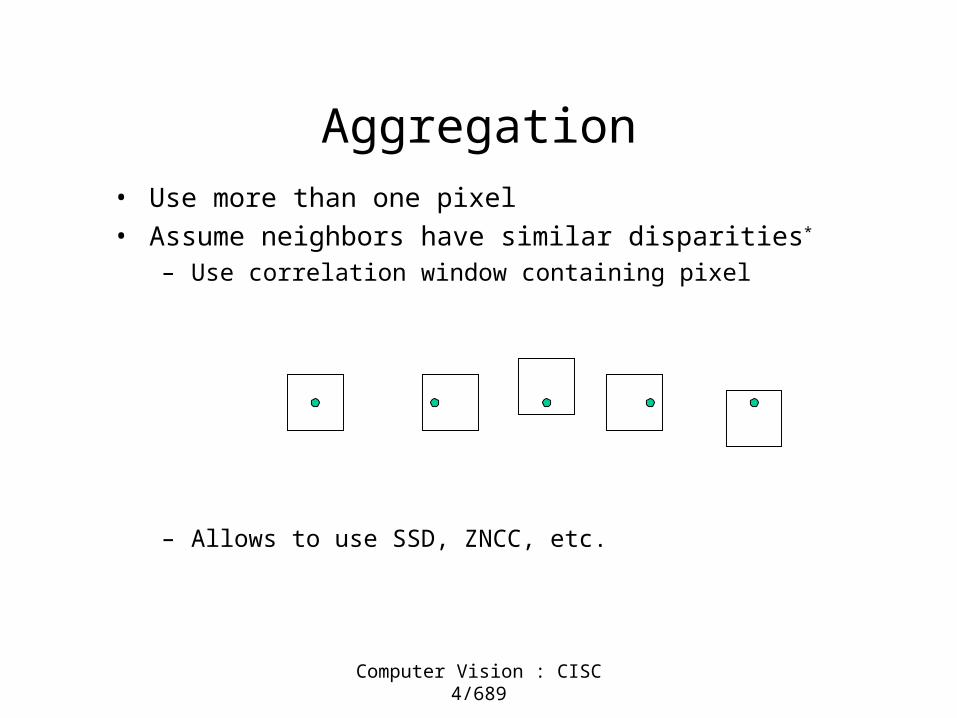
Aggregation• Use more than one pixel
• Assume neighbors have similar disparities*
– Use correlation window containing pixel
– Allows to use SSD, ZNCC, etc.

Computer Vision : CISC 4/689
Comparing Windows: ==??
ff gg
MostMostpopularpopular
(Camps)
For each window, match to closest window on epipolar line in other image.

Computer Vision : CISC 4/689
Compare intensities pixel-by-pixel
Comparing image regions
I(x,y) I´(x,y)
Sum of Square Differences
Dissimilarity measures

Computer Vision : CISC 4/689
Compare intensities pixel-by-pixel
Comparing image regions
I(x,y) I´(x,y)
Zero-mean Normalized Cross Correlation
Similarity measures

Computer Vision : CISC 4/689
Aggregation window sizes
Small windows
• disparities similar
• more ambiguities
• accurate when correct
Large windows
• larger disp. variation
• more discriminant
• often more robust
• use shiftable windows to deal with discontinuities
(Illustration from Pascal Fua)
Computer Vision : CISC 4/689
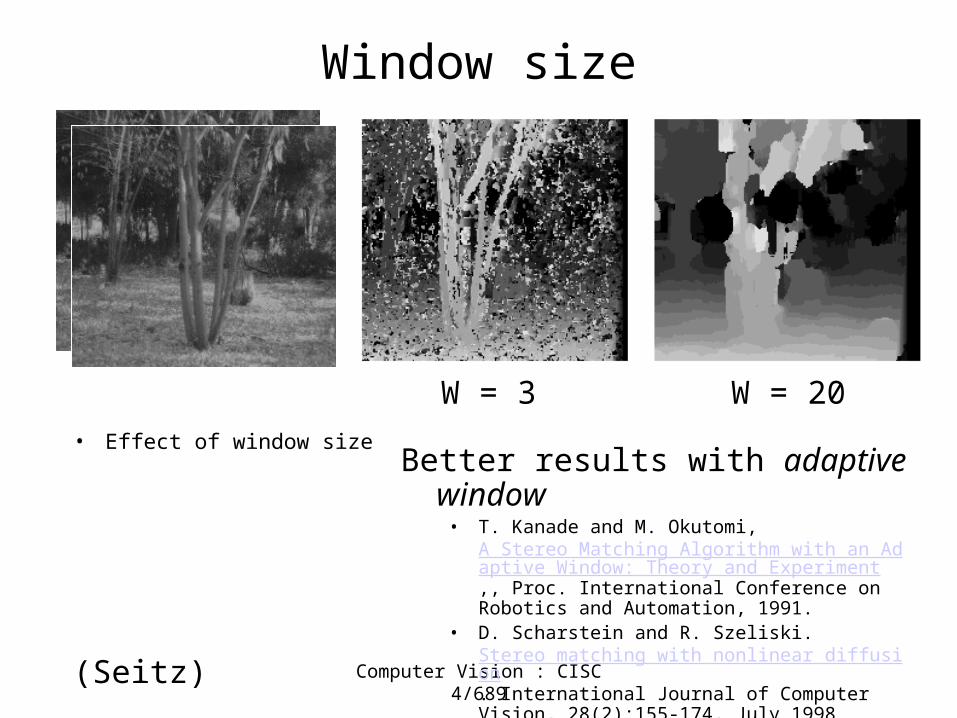
Window size
W = 3 W = 20
Better results with adaptive window• T. Kanade and M. Okutomi,
A Stereo Matching Algorithm with an Adaptive Window: Theory and Experiment,, Proc. International Conference on Robotics and Automation, 1991.
• D. Scharstein and R. Szeliski. Stereo matching with nonlinear diffusion. International Journal of Computer Vision, 28(2):155-174, July 1998
• Effect of window size
(Seitz)
Computer Vision : CISC 4/689
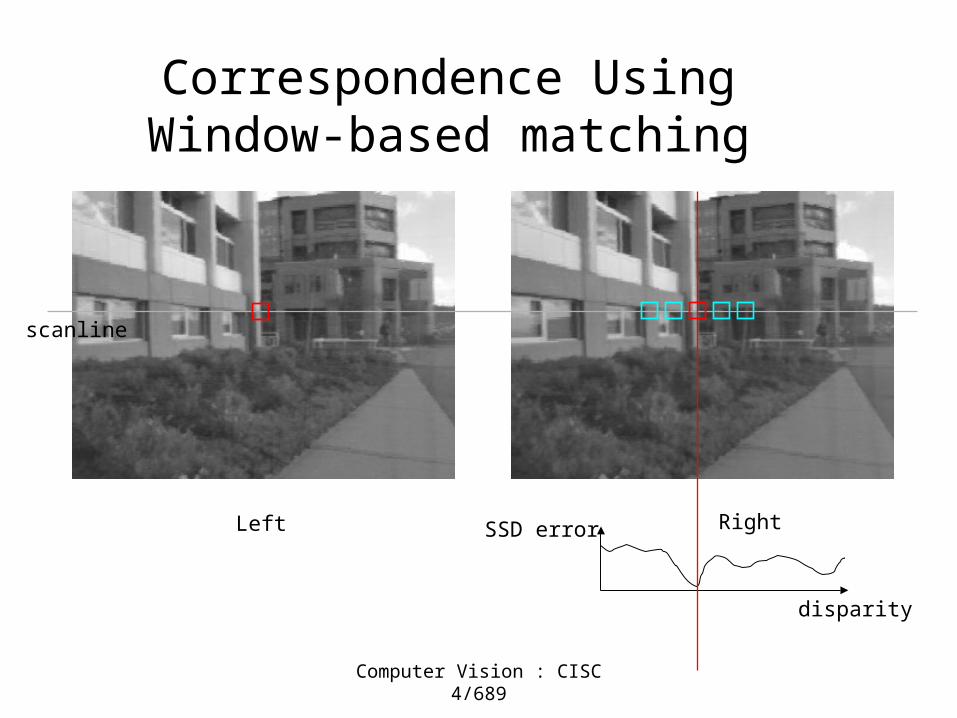
Correspondence Using Window-based matching
SSD error
disparity
Left Right
scanline
Computer Vision : CISC 4/689
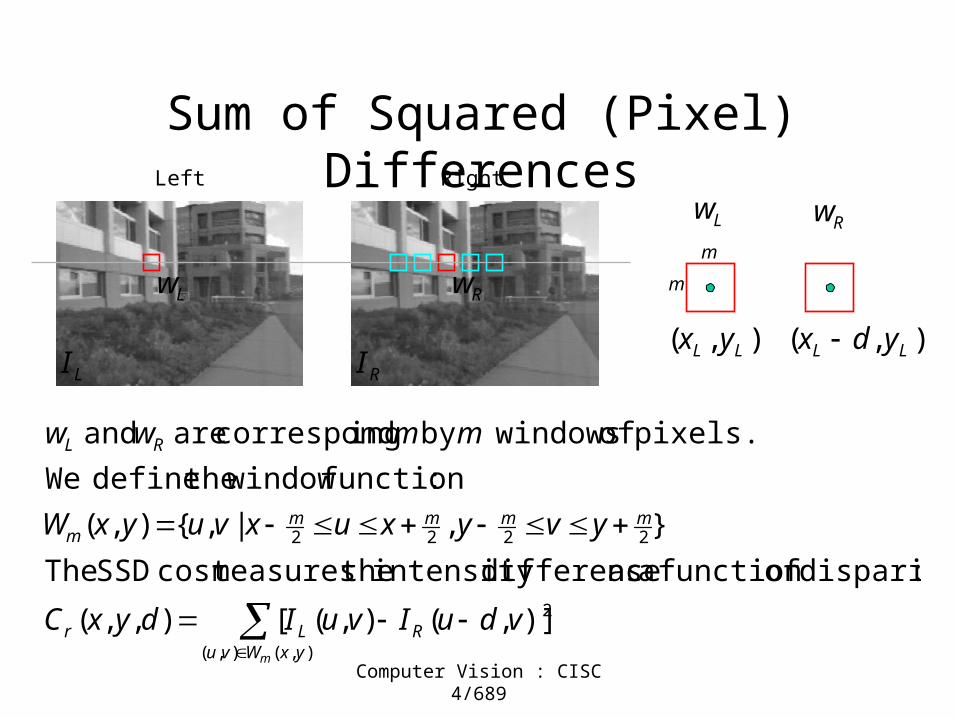
Sum of Squared (Pixel) DifferencesLeft Right
Lw Rw
LI RI
),(),(
2
2222
)],(),([),,(
:disparity offunction a as differenceintensity themeasurescost SSD The
},|,{),(
:function window thedefine We
pixels. of windowsby ingcorrespond are and
yxWvuRLr
mmmmm
RL
m
vduIvuIdyxC
yvyxuxvuyxW
mmww
Lw Rw
),( LL yx ),( LL ydx
m
m

Computer Vision : CISC 4/689
Image Normalization• Even when the cameras are identical models, there can be differences in gain and sensitivity.• The cameras do not see exactly the same surfaces, so their overall light levels can differ.• For these reasons and more, it is a good idea to normalize the pixels in each window:
pixel Normalized ),(
),(ˆ
magnitude Window )],([
pixel Average ),(
),(
),(),(
2
),(
),(),(),(
1
yxW
yxWvuyxW
yxWvuyxW
m
mm
m
m
II
IyxIyxI
vuII
vuII
Computer Vision : CISC 4/689
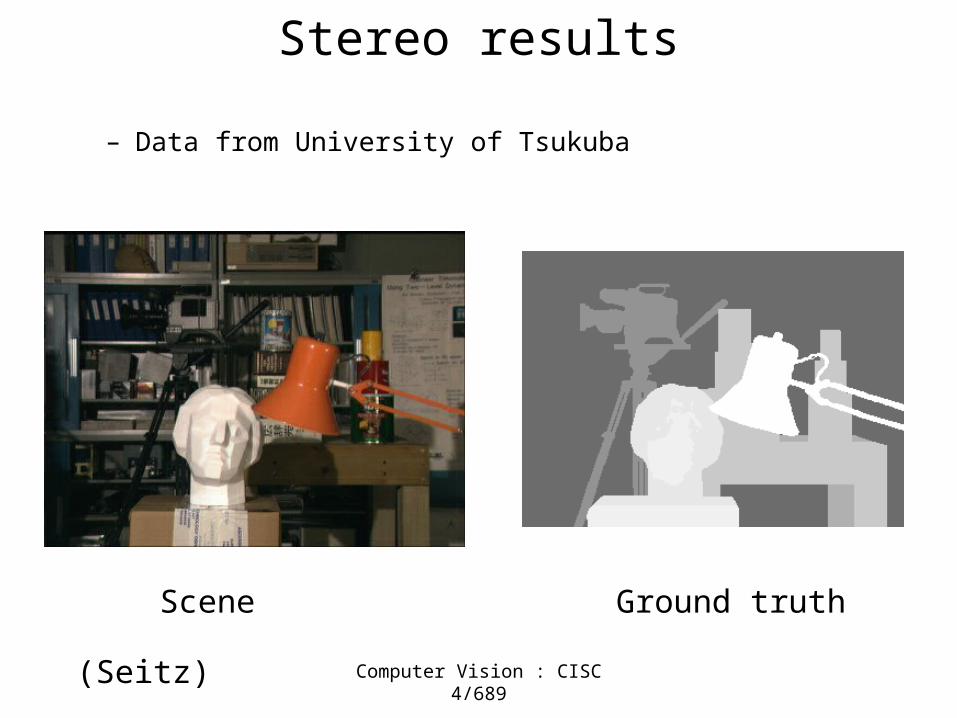
Stereo results
Ground truthScene
– Data from University of Tsukuba
(Seitz)
Computer Vision : CISC 4/689
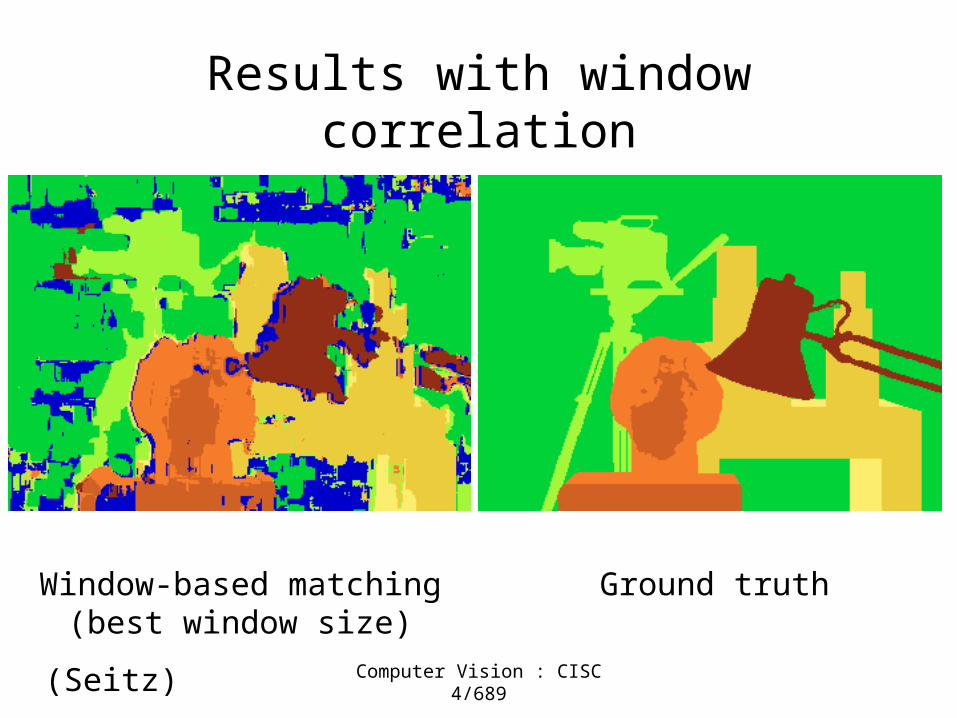
Results with window correlation
Window-based matching(best window size)
Ground truth
(Seitz)

Computer Vision : CISC 4/689
Results with better method
State of the art methodBoykov et al., Fast Approximate Energy Minimization via Graph Cuts,
International Conference on Computer Vision, September 1999.
Ground truth
(Seitz)




























