Embed Size (px)
Citation preview
KAERI/CM-116/94LRN4
4 2
sfis. 7|y-7|# 7|j#
The Developing of Avanced Robotic Technology
71#21
XIWX1I01 7|S0]| as g?
A Study on the Tele-Existence and Intelligent Control of a Robot
System for Nuclear Power Plants
■a =f- 7} &
# 4 4 4 7] *
MG 0 6 egg
os Tl
MASTER# ^ € 4 ^ ±
OTUTBH tf m DOCWENT B #1*8nfflH SAitj rngmia

KAERI/CM-116/94
4 2
SMI 7|y7|# 7Ha
The Developing of Avanced Robotic Technology
xi oi 7i a on as gf
A Study on the Tele-Existence and Intelligent Control of a Robot
System for Nuclear Power Plants
<a f 7] #
# 4 4 4 7| #
H <9 4 £

DISCLAIMER
Portions of this document may be illegible in electronic image products. Images are produced from the best available original document.
- >

-I-
W i:•ftk &
l?
&Iy i°tt
: Br -& ^Jk^k lo
fc
Sc: -ktok-zyp-nlk
kgi k : ^R,k-6R,##
A ’S66T
'-kh-fel-lk -gk^w tolkk Utk tolk^rk k#k -k&B kBr tofev'k -§"kBrj
r-z!r&> lb11-kins' "^r
te\h -gc^ilrio tetefetEi*
-SL 4 p
I. 415
€44 55 4^44 €4 ### 4## 4544 5 #4 ^
ii. 5# ^
4W #4444 #44# €45, #44 e}a>, -f^ 4€ 7Ht #2). ##
#-## #5#7l ##3. #### #4444 #44 3-54 44#7l 4^#^ #
#4 #45 #4#5 545#5 54 #44 ##4 ####<*11 44#5 544
44- J6-5##. 4* 444 444-7} 444 #444 44# si### 44 44
#44 #5 5.5:4 H4# 444- 4^45 €4 ##44 44# €4 &44 4
5 454 s.44^-54 4444 #444 4## ^4 #44 4444 444
# ^r 4^-4, ##4 44 444 44 #4# 4 44.
#4 2:44 444 444 rLtfls. 44# 4 44 444 444 444 4 4 5:4-453. 44#7] #sfl s^-aHtiI 44 4## 45# # 4 #5 #4 #
#44 44# 4 ^#4 €-&-##. 5# 44 #44 41444 #4444 5-4#
4 44 444 545 54 #44 55 4^Ht115 €444#. zl#jl ##
554 #44 4# 444 m4# 4441# 44 7}5# ##5& #4 #4 4
#5H3 44 554 €## #4711 #4 #5##.
#44 #454 47}, 4e#44 554 4-5 54= 44444 4^.# 44
5 €4 ##4 7l#4 4544 7l#o)l ## 7l#7M4 ####.
5 4-414 445 444 554 4# 7}#### 444- 444# 4 ^#4
;m#4 54#.
— 3 —
# 4-4]* 447H1 41*4-415 4*444 4*4-411 *4 1 #54* 5
1*1 4*4- 14-.
• 41 1 41*3}4|:
14 5*M1 144, HHM #11 HI# #4#* 1* #5# *41
44. 41# 144 44 45 #44 444 1 45* #5*4, #4 #444
4# #4444 4##4 1* #4# 4## 4#4 1 451 #54* 44 #
7ft4. 1#453. 44# 1 45* 1 44*# 4*44 1##4 $4-
444 1 44* 4*# 4*4* 45.44?} *141171 4*4 4*4 4
#44 *# 4*7} 14-. 5# **444 44*4 #4 4444 44* **34
* #4145 2:44 #1 447} 4el 144 4* 4*4* 4 *45*4 44?}
44 1 #5.* 4*4*4 15# 44444 444 44 115* 4^14 #
144# * 44. 54.05 44 414 #4 #4-5 4445. 2:447} 1 451-
251* is# 4** 4*4 114 15*4.
• 41 2 41*441:4*1 5* 1 14 414 5* 4* 7}*41 7}# #5# *** 4* #4
4 1445. 4-4 5>1 4144 144 341 14* ?}#- 4*4 44 1*1
4. zl 7}*14s *4, 4441 41# *W4=#* 7}## 4444 4445
4 4#* 5*41444 7}4- #54-4-5 # * 14-. Ill* 1## 41*1
414 5*4 5*1* 44 451- *1 1 * 1441*4 4# 441 #4* *1
54-5 41* #44 5*14-.
-4-
<K>9oJo|lU
K°#I
t *3J
I I<J|J
Mo
Wn-
sml
ok)
'BT *o| K1
°lski #J JUJf •fr w
djo^J : o[o
o|n) •it r wp) r o’
0 M skinr
<1 <1 TT < Wsk 7(0 %sml •K]r tJ
M
Iski
onKo*<fs|niTW%
rf v#
* IW *5
O*
'o’Ujo
3"W
'KfHml
|I Si
"o1skis
t sT <h
om
7(0 p
mlK°
T o-^ V
7? W
JJ 5rj- $"w hfJU *
TT <# £J Jb f 9
TsJTp
JU tfi|o <5$
$ *W" *K 7(° ^M *& 3" <|r ski V s- m|ii ^ ml <*| W» Kb
W Tb? ss;ml o" 3< W Ph 'K|
rf
'em$n
#Tn
mlrrir%PK
Tn3"W*?sk>
tioJo|o'o’
3"w
■ Jb
W W jii$3(
W f 5 ib. wX
it sKr1!'1o\ sK & 'iio Tx 'S’
Jf ml 1i- M ml 'o’ o' JU 5f Ifrrr\% 4 P|o sK 3" 3T w OHCO o“ s ub 'o- ml mi W sUW
p?J K l)|o 's' W5 w
If
*111
1 ?M
4. M
s.s.b
.^
W1
41#
9 Slfe
5.S.E
.S.A
1 zl ^
^4 til 1412
14. z
z.#H
o}3)
^ ^1
M 3.
M.
24 14
4 q-
4-
45 19
44 ^4
. 1-
19^
4444
M sj
le 2#
94- 7
|#&
1#
711 4
#4 1# 'RT
p|rr|3"ini
'oT5sr\
9$'K#J
ifo7K
41
if#
$55
IilO sUW
iinI

44, 4# 114 #4 #4# 4355 13 131# 4-8-# 4s. 4#7l ;1il
4 4# 1*3 4*3#4 4*l7l 4% 35 *37] 7H1-61 4*434. 431
1*# 4#5#4 3*# *414 5 4^ *1# W155# 444 44# 4=
&# 44445. 4-44 7>*5# 14# 444 4* *514. 44-4 # 4f4
## #44 444# 54# 44 153# 4#44 4*5#3 1#*3 13#
7M114.
m. !*4|#4 #)* ^ 4#
4 4#441 4414 441 1* 4# 4 14# 4*4 #4.
• 4 1 4*44: 4#44 41# 4## 3.5- 15# 1W 144
# 1*4# #4# 51# 4## 7M4453#4 1 45# 111# 1
1# 41114. 444 4# #44 4# #4# 44 51144 14. *445
547]7> 41 *44 1*44 41, 444 51# #44 3-514 44# 1
15# 4114. 441 1144# #41 #5444 41 4453. 11 *4 *# ### * $14. 414 11# 2-DOF# 5-# 544# #4 5444 *7}
44 4*114. *445 5445# 5# 15# 5!3H54, 7>4 1355
*4 1 45# 4*1# #1# 114.
• 4 2 4*44: 11 35# 4*1 4* 5# #5*g
# 1*44# H154 7M4 441 15 5#4#1 *4# 4*1 44 #4# 5115, *444# *47> ^44# #4*3# sfi#l3# 54455
— 6 —
44# &fe t-44- €434°]# ?n# t$t. tf-^s. #4#
4f# Tie] #44 #44<y 4^.4 £fe #t3#4 f#t 4-###] 4Tie]* ffe^fe #t tt*)]#*] 7]5]7> ^7]5] o]# ^o]*]^ ^-f 7]e]#4#
5>7]^^M &&44T-1* 4-H-# 4e]#44 rfl^M 7]# #^t. 4-4433 #4f44# 3#33 # f $lfe #34]] 44^# A^]6\] rfltflA] 7]##$
4.
• 4] 3 4]tt-4]: 4t 5-5: #a]:£ 4]o] #tg a]^ofl xfl^ e^
4# ^f4]T-1fe 4# 3^-f #A]:£ 40] «-t% Z]^o] 711M ^Wt-JLT}-
ft. 4# 33H 4# 7]f#4 4 #444 a.## 44, -gAitb 44 A]^5]
#4, 44 #3e]# ff #4 4# 4ft i##3 4f4 7]#* f4 f*1^. Sf 5.4 #4# ##.4 S. 4^.6} ^44 f s.42. 4:4:4 4t# 4#
3£33 #4t 4-4 4h4 tf.
• 4 4 4t4-4: A]t44* 4ff f#4 4 7] « Jif ft 7]# 7]]#
t 4f44fe 4-4 M 3.33# W 44 M444 #t44 3.4 44
4- ft ###-& 444-44. ft 34 3334 tt4f 3f tt4 444
Hi 4f# f 44 tfe 4*444 44 4 #3# &##7] 444fault stability margin# 44144- 441 4ft4 44: 4% 44 3444 t
44 34- 1HM13 44 f 4fe 444 tt t#4# 444-3 zz. 444t #
4444. 34 ^444fe ft 34 5.35.7]- 3.4- 4-t4 #44 f43 #4#
ft t#4# 71-44a] 444 3.4 f 4f4tfe tf
— 7 —
• *1] 5 41#341: 43 #23# 4-#-# 4# 2^3 7]# #4 31 4#
# 4#43# 44 444 2#3 44# 4 #34 #4 32# 4# 4, 4• 4#34 #5. 3 4] 3 44144 7M#*332# 4# 4333 4#2#41 4%
32 444# 43 43.3# #4-4 #4343. 44 444 3s. 444# 43
34 4#2#4l 4444 #S.4-—3, nonholonomic 44 2:4# 44# 434
4#2#4l2 4 34# 4#44 444 444 33.# 414 24# 4#4# 3
33 #34 * 44 4# 32 #34# ;H1343.
IV. 4#7H#33 ^ ##41 44 43
43# 2# 4234 -fi3 443 4#4- 43414 ?H# ## #3# 43
4 #71-4- 441 4442 $14-. #3 444- 44 ##4#, #3 7}##, #3 3
#4, 4-# 2^3#, 23 33, 3#7> 424 7113 # 3# #4412 44 5:3
7> h3. 3 4# 4-411 7H1 34- 3 ##34# 4441 4#444.
• 41 1 41 #4-41:# 4#4Mi# #32341 a1 33 32 #44 443 4 322 4#34 2
37H41 344 413# #43# 31# 41332 #4343. #4 4 43#
4434 7>3 #3# 4#34 414# 343. 44134 3## 343# 7>3 # 3# 33422 #3# #27} $13. s# 323# *4 42 234# 233 4
41 €323 71^223 #3344 # 343.
-8-
' XI 2 XI94X1:
# #9XlA|9 3#XlA| 44# 9#fe 7|e|#^ 4>i#o.3 1-51X- &444
44x1444 7i# 4^3 #x ##4499x149 ##4x1 43^143 9##
9 &fe #3.51 #1 ;H#43 4341144 93# XI# #334 1X1 14# x|5|
ai^as. 9## 9 #14- 3#4. 993 °lelt #X|A1^1 9X1435 9
#44 5.#Al^#4 #X14# 44 44444-3 14"#4.
• XI 3 XI94X1:
fe #9# #44 #4 Ai^tfl^i 34 ### 4-34114 4 >.#0.5. 994 9
*3 XI47} 71-94X1 43 444 9*3X14 444 4# 14(4444, 43. 14
9)4 4 #4# 14# 4 94# 9 $1X1 43S.X 34 4443 ### 43 1
97} 7}943 zz.o)l 4# 44# 9*3 XI4# 9*344 494 494 49 3.44 Xi 4# 9 #xi #4.
• XI 4 X94-X1:
1 #94Ail 44 3*3 335.4 4# 44 4# 3*3XlAi 14# 9 #1
34- 4##9 4443 34 a>##4 ##4- 9# #494- Xl#4#4-. 1 #9
XIAi XI #43 494 3# 44 71994 3# 4# 4 44 949 7>41 1X1
3*3 335# XI444# XI 341## 43# #4#4 4. 3334 9*3 14
X]# 444fe 444# XI4 4%# 444 XI444 4944 3#94 14#
XI3 #4 349 # 444.
• *1] 5
<W3.£i: ^w 4" $xn *&= *i
£*3 71^0] 7lfs]^, 4MM 4^^r4 tfl-sH ^7]] ^ 9X^%sq# 7\^a. uf5}A^ ^ ^tfl #^4^1 oi^s/g-s) 4«g ^3a]
e #4# #-§-# 4" ?M44. M A>^tg^*3 71^0] 7flo>£l^o.nS., o]^s.^ 7]f^ 2^] ^4§14 ^ cgf
^ 44#°1 3-S-l 4" $142. ^444.
—10 —
SUMMARY
I. Project Title
A study on the tele-existence and intelligent control of a robot system for
nuclear power plants
II. Objectives and Importance of the Project
To make a robot work in hazardous places and unstructured
environments such as a nuclear plant, deep sea, or space where a human
cannot access, the robot system is required to have the capability to cope
with the changes and uncertainties of the environment rather than the
capability to repeat sequential jobs continuously.
The operator can dean with the dangerous environment safely and
extend the working area easily, by introducing the tele-existence and the
mobility to the robot system.
The control technique of a robot system used in this circumstance is
based on teleoperation. The advantages of this scheme are that human
intelligence can be implemented in the control loop and the operator can deal
with the dangerous environment safely in remote site and extend the working
area easily.
To increase the efficiency of human intelligence it is required to develop
an intelligent monitoring and control system. In this research, we develop
intelligent control methods related with tele-operation, tele-existence, real-time
-11-
control technique, and intelligent control technique. Those are key techniques
in teleoperation, especially for the repair and maintenance of nuclear power
plants.
Since the necessity of repairs and maintenance for nuclear plants is
increasing, we have to develop the technology of tele-existence and intelligent
control.
The objective of this project is to develop the tele-existence and
intelligent control system for a robot used in the nuclear power plants.
This project consists fo five subprojects, objectives and importance of
which are described as follows;
• Subproject 1:
In teleoperation, it is crucial for an operator to feel the reality of the
work in progress. The force information is vital as much as the vision
information in this respect, especially in dealing with fragile or explosive
objects. Conventionally, the force information has been acquired from force
sensors.
However, force sensors are known to be inadequate in some cases as
they require complex hardware. Furthermore, when the slave manipulator is
located at a very far place from the operator as in space applications, the
teleopeation system becomes unstable due to the time delay in transferring
the force information from force sensors to the operator. So, we need a
-12-
method which makes the operator feel the force information, even though
with the time delay..
• Subproject 2:
In development of intelligent robot and telerobot, recognition of outside
environment is essential part. To determine 3D position of target object, depth
information is basic information. However it is not easy to obtain depth
information by using machine vision. In the nuclear power plant, accurate
measurement is very important to avoid a accidental motion of the robot.
Therefore, in this research, effective depth estimation system for
eye-in-hand robot is described.
• Subproject 3:
A research of mobile robots is an important field which can be applied to
many parts of industry and impressive progress is being made in that field,
as evidenced by the growing volume of research papers published each year.
Necessary for the mobile robot are environment-detection, path-planning and
locomotion control. All of those parts should do good function and be
matched well each other. Most of all, the real_time locomotion control to
keep the given path right and rapidly is the basic but inevitable part.
—13-
• Subproject 4:
This research was proposed as one of technologies for Development of
Distributed Controller and Fault Tolerant Technique using the Intelligent
Control. The significance of walking machines is more increasing as a robot
that can replace human race - in hazardous working envimment. But there
have been few studies of fault detection and tolerance of the walking robots.
This research will function a basic theory for studying systematic and
comprehensive fault tolerance method of the walking machine.
• Subproject 5:The aim of this study is to develop an autonomous navigation scheme
for mobile robots. For this purpose, we proposed a local motion planner using
neural network, based on a vision sensor information and developed a path
modification strategy in order to apply the proposed scheme to , a car-like
mobile robot. This kind of work makes it possible that mobile robot with the
intelligence can work even in the environment where the human being is
unreachable. In this study, we developed the autonomous navigation scheme
based on neural networks that micmie the human brain.
m. Scope and Contents of the Projects.
This project consists fo five subprojects, the contents and scopes of which
are described as follows;
—14 —
• Subproject 1: Bilateral force control of a robot hand using
intelligent control technique.
In this research, we propose a novel approach that acquires the force
information from the virtual realities of internal models. The slave
manipulator as well as the objects is modeled beforehand. "When the slave
manipulator is in contact with an object, the force is calculated from the
stored model. In this approach, the problems caused by complex hardware and
severe time delay become insignificant. The proposed method was implemented
on a 2 DOF arm that fits to a finger of the operator. We modeled a robot
hand as the slave manipulator and performed experiments to get force
feedback from the virtual realities.
• Subproject 2: Intelligent robot system using image information.
In this reseach, the previously proposed depth-from-focus techniqure is
improved. And a novel calibration technique for close distance is developed.
As a subsidy sensor, ultra sonic sensor is studied also. The ultra sonic sensor
give a valuable information in interpretate the blur image. Finally, we
propose a new machine vision structure which has programmable hardware
for algorithm hardwarization. •
• Subproject 3: A study on the real time motion control system for
mobile robots.
-15-

In this paper we establish a real_trme locomotion control system, of
mobile robots, we will perform the research about kinematics, dynamics of
mobile robot and construct a real_time control system, locomotion control
algorithm with the base of the 1st year research. In addition, the availability
of this research will be shown through the simmulation and the experiment
with a simple mobile robot constructed will be compared.
• Subproject 4: Development of Distributed controller and fault
tolerant technique using the intelligent control.
In our rerearch, the general scheme of fault detection and tolerance of
the locomotion of the hexapod robot in even terrain is proposed. The fault
stability margin is defined to represent potential stability that a gait can
have in case a sudden fault event occurs to one leg. Using this, the fault
tolerant quadruped periodic gaits of the hexapod walking over perfectly even
terrain is derived. It is demonstrated that the quadruped gait derived in this
research is the optimal gait the hexapod can have maintaining fault stability
margin nonnegative. In simulation, the modified tripod gait is proposed for
the hexapod to continue optimal locomotion after fault occurrence. •
• Subproject 5: A study on the intelligent navigation for mobile robots
by using neural networks.
Through the neural network, we implemented a local motion planner for
—16 -
navigating through the corridors, based on the sensor information given by
vision sensor and ultrasonic sensor system. Since this motion planner is valid
for the only omnidirec- tional mobile robot, we developed a path modification
strategy in order to this planner to a car-like mobile robot with nonholonomic
constraints.
IV. Results and Proposal for Applications.
As the number fo nuclear industry increases, the application areas of the
tele-existence and intelligent control of a robot system for nuclear power
plants are expanded. Moreover, these have many effects on the sensor
application, factory automation, autonomous vehicle, automatic assembling
robot, fault diagnosis, and expert system, and so forth. The research result
and it's application of each subproject are as follows. •
• Subproject 1:
In this research, we proposed and implemented a method which makes
the operator feel the reality of the work in teleoperation using a force
information as well as a vision information. The virtual environment was
used instead of the force sensor in the force control. For a practical
application the virtual environment should be expanded into the 3-dof space.
The system is also extended into the total teleoperation system including the
slave manipulator.
I/
-17-
• Subproject 2:
Since the reseach is performed for the practical application, it has great
possibility. Specially we study about the blur as a practical point of view. To
overcome the disadvantage of blur, a subsidy sensor system is also study.
And the possibility of real time implementation is considered. As a furture
study, by the system implementaion and integration, we can prove the
usefulness of the proposed depth estimation scheme.
• Subproject 3:
Through this research, by making a good locomotion control in short time
and spending time much more in other parts(environment-detection,
pathjplanning, etc) we can construct a good mobile robot to faction well with
larger information and more complex path given. •
• Subproject 4:
In this research we defined the possible fault events that can occur
during the straight line locomotion of the hexapod robot in even terrain and
proposed the fault detection and tolerance method. The scheme proposed in
this research will be used in implementing the walking robot which has the
ability of fault detection and tolerance. It can be helpful to not only making
direct control scheme of the locomotion of the walking robot but also
considering the kinematic constraint of the robot design.
-18-
• Subproject 5:
In this study, we developed the intelligent navigation scheme which can
be applied in the indoor environment with corridors. This scheme can be
easily applied to most class of real mobile robots. Therefore, we expect this
scheme can be used in the dangerous environment such as nuclear plant.
Since we proposed a modification scheme for a car-like robot, we expect our
algorithm can be applied to most mobile robots regardless of kinematic
constraints for mobile robot.
-19-
MSS' k vM Mv .. < . '

■if :xj-
4| 1 1 *1 #................................................................................................25
*8 2 1 a* #3=4 «9=W 1^4..........................27
41 1 1 ^9 7111-4 444- 14.....................-.........................................27
1. 494 1 44................ ............. .................. ...................... 272. 49 #1=.........................................................................................31
3. 494 #4 1 14........................................................................33
41 2 1 44 5:4-714- #1# 414...............................................................351. 44 5:4714 7BA..........................................................................35
2. 44 54714 95..........................................................................37
3. 44-44 4M.................................................................................39
4. 44-1 44....................................................................................4041 3 1 7}4 4:4-i- °l4-l 1 44.............................................................43
1. 7>4 144 «114.............................................................................43
2. #44-4 4# 444#....................................... 43
3. 7>4 #4444 1 45. 44 4:54#..........................................45
4 4 1 #4 4^14 94...........................................................................50
1. 4 #4 44.......................................................................................512. *H54 &4-7I................................ 53
3. 5.4 45. ^ 44 4 °15 4s..........................................................61
41 5 1 #1 1 14-.....................................................................................65
1. #1 1) #414-4 4# 41............................................................672. #1 2) #4 14 41................................................................... 79
-21-
*1] 6 4 4# ^ 99 4*11.......................................................................81#3. #4.......................................................................................................... ••••••83
*8 3 4" W °]-g-4: 4# 3* *1*^ ............................................87
4 1 4 £9 tfl-8- g 44 .......................................................................... 87
*0 2 4 #4# £-§-4 Tie] #4............................................................891. #4# £94 7|e] #4 ........................................................... 892. 444 #44 #4^................................................................. 913. #4* £#4 Tie] 94414 fM4 44:*.4£4. .....................98
*11 3 4 &&4 4*14 £^14 44 94 4 £4..................................... 1181. 3-94 444 ^.4...................................................................118
2. 394 4*1# 4## 444 121
3. 3944 #4* £94 4e] 94.............................................1264 4 1 3^ £4 45] 4-H41M4 9-4................................................135
1. 4SI DSP 4^1 £4 7H3................................................................137
2. TMS320C404 44............................................................................. 140
3. DSP 4E.4M4 VME PC Host £44 £^...................................140
4. TMS320C40 DSP4 44 ^15.44:4 £441 £^.......................... 143
5. HAU(Hardware Algorithm Unit)......................................................143
*1] 5 4 4# 4 99 44 ............................................................................ 148
#3 94.............................................................................................................. 149
4 4 4- £#5.£4 4*14: 4I£#^ *1*^M1 44 49................... 1514 14 £97114:4 #44 44....................................................................... 151
*11 2 4 £# 3.#4 3# 44...............................................................152
-22-
1. o]3? Sg- 4^. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . •,. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1522. 7144. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 152
3. 444. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 156Al] 3 4 A|]o] A]^## hardware f 2. 431..........................................163
All 4 4 *H #315]# 94. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
1. 9^3 a)H . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1672. 2B]a1]o]. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 170
3. DC AiS. 3A$\ 4W4 ^ AiM. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 178
3] 5 4 Simulation ^ 44 ...............................................................................187
1. Simulation............................................................................................ 187
2. 4 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 196
31 6 4 ^ 4^431...................................................................................200
#31 -5-#............................................................................................................. 202
Jf- s.. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .204
3| 5 # ^ Ago]* ol-g-^. 31# .. . . . . . . . . . . . . . . . . . . . . . . . . . 207
All 1 # 4# ^ 4^1................................................................207
1. 314 ^ 44..........................................................................207
2. #9 -W. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 208
3. #9- 314 ^ 44 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .210All 2 4 4# M 5.S.E.S] 24 44 ............................................................. 212
1. 4# 24 5.224 o]## 2.1........................................................212
2. 44 #4.............................................................................................. 213
31 3 4 3L# n.......................................................................................220
1. 44- M 525# 444 44......................................................220
< i-23- . 2
f/
2. 31# ## ## (Fault Detection Profile).......................................... 221
4 4 # 31# ^4 ^*3 #44........................................................................224
1. 44 ##.............................................................................................. 224
2. 44 #44 (Quadruped Gait)............................................................224
4 5 # 5.-5] ## .............................................................................................. 234
1. ##.............................................................................................. 234
2. ## 14 3L#-°1 #4M4 #4................ 235
3. ## 24 3144 #4M4 #4......................................................... 239
4 6# #-E # 444-4 .................................................... ........................... 243
#31 4#.................................................................................................... 244
4 6### ^5.#4r 44# °W^4\ #^4^9 7]# 247
4 1 # ^4711#:^ 4# ^ #4........................ ............................................. 247
4 2### 33.#4 44# #5. 4#7l 4#............................................251
4 3# #4# ol4&44 ## #3 4#7] 7fl#........................................ 261
4 4 # 15] 411- 4# ## 4#................................................................269
4 5## #............................................................... -.................................... 286
#31 4#...................................................................................................... 288
— 24 —
*i| 1 S M B
354 ###4 34 44:4 S514 371] 4## 44 4#7}3 44 #4
4 #4 354 7}5434S3, 444- 3^45 444 4444 44. 4a 4#
444 4^435 44, €35., 533. #5 444 33## 444, 3-8: 33
3 55 5# 5 434 45-4-7] 445 44414s. 445 5*335} # #57}
43 #4471] 444. 444 554 44 43 4^4133 434 # 4 434
3 3:534 345 5*343 43145 434 #44-2.3. 34 434 #447]
#3 433- 35 s45 s#43 345 334 5 45 43 s#5 454 3
34 -2.543- 4343 344 343 435 44 443 5^3] 353
4 43- zz3]4 3-45 s.54 333 3434)3 43 3445 345,
5 4443 33, 344, s4 3453 34 4m3 #54m 4434 345
4343 5WS5 #5 35 5 53-2-3. 34343- 3-34 43 34 43 =3.rz.4 3445- 345 4335 434-2-3.5 &33 33# 5 45 434
elA 3443 43- 54 €43 44 €4#s a>#o] ^e#7] 45 33433
344 S55 433-7] 3435 443 345 4545 535-35 53 €#3
43M 4345 534 3 -2.543-
43 44 #34^13 344, 3437} 434 4#4]3 345 m344 1
3] 34 4# 4 45 s.^-4 m34 345 5*345 €3 s#3 33# #4 44
3 4334 5€ 4#4 4345 534 3.543- 34 4#43 4435 43
7}3 434] 4345 545 55H31 3547] 343 3435 34 443 3
41-7115 4#4m, 44 443 3# 334 #55 53H3] m3# 5 443
43- 4# .3435 34 433 3M3 #-33431 €#343 44, 45 354
4a]55 a>5#A5.3 341 5 43 4 #3 34 433a] 333 435 €t]
443 34431 #3431 45 €4 41# 343 434 -2-343- €4 s35
-25-

*1-8-# 4444# 4444 444 9414 4#fe 9##fe 4# 44141 •£#4 4# #4 #9^ m#4&41 41 ###7} #9 94 44 ##4 444 5
4:4 fe ##fe ^114. -M 4 4149 44414 449 4#fe 4-8-#4 &4fe #
fe #4 955# #49 9 97} #^455, 44 #4 4# #95 9 ##44:
##. 4 #9# 4## 5.5:4- 4fe#559 5.5-55. #4# 44 #9fe 4## 711 # 9 44. 4 444: 3x84 41444 544# /^l-8-#fe 44 444 55-5
5 #4# 44 955 4# 7>fe#9 #554 44 444 49##. #4 44 4 4###* #4 5#4jl 94455 5#4#7l #-£ #4 9441 447>4
4fe# 4#4 444-71 994# 4fe# 544 414 #454# 9#4#fe 4 -8-# 415# #44 5f44.
5- 4944144fe #4-8- 55- 45## #4 #4# 4#4 4#414 4#
fe 4-8-44 7H#4# 4# #455 #4. 4# 4# 4 419441 fe 444 44.
. 4#414 4## 4-8-4 55- #59 ### #414
. 4# #5# 4-8-# 4# 55- 45#
, 4# 55: #44 414 fe# 45#4 9# 49
. 4#414# 4-8-# 9#414 7l 9 5# 94 4# ;H#
. ## #5#fe 4-8-# 4# 55-4 4# fe# 4# 49
2#414 6#44 4 414 441 #5 2945 441 4# 41-8- 4 #4* 44#
44.
— 26 —

n 2 § I a# oiss tH^ai g^o-i
5)11 W ;T]#^ 133
1. #*# 44 ti 3.3
7l#^l #4* 444 **#4 3.7]] 4*3}] ## 447}# #4 ^-#4 #*
*** 4W#7] 45##. o]5]4 7}^-#4 4 ***5# #4 #43044 5 *4 41* 44 **44* ##. ##4# #<a-g- 5.^-gr -g-^o]4 3j]oi4,
4 54, *# *4- #o] #*#jl #4-44 44-6- 44 430# *5344 *4
45 ^##*3.4 44 **#* 444] ** $%#. #44 43H1 4 =.44
* 444 44 444 4444 S# 44444 4# #44 -f^ #4 *4- #
4 6J54 44 4*#4 4# #4442 444- ^*344 #* #*44 4*4 44- h# 44, €4-5, 445. #4 #* 444 44444 44* *W4 4
44 44444 3# 44# 44#4* 4*#7] ##4 5£* #*#* ##*
4*44 444.
44# 44* *4 #44 ##* #4 4444 #4, 4# ##4 4# 4
4# 4** 4*5. #4 4*4, ##7> 44 4* 44#444 44 4304 5
53^4] 4# #444 44* *##* 4#4 4 #4* 54*5* 44# 44
*#*&#. 444 4# #441 **4*5 44# * 4* 4*# 544 7fl #4 *9-4* 4*4, 4# 4# #7># #^55.4 #4 34-(teleoperation)4 7]]
#4 £.44* 44[1,2].
€4 3:44# ##4 4444 *#* # 4 4 #7] #4#* 4* *##.
4, 447]* ### ^44 44#44 ### 44#4 W #44 4# 44#
4** 5l4#jl, 44 44444 44#* 53M zl h445 #*#£# #5
-27-
3.4 #14-4 4 444 #1#4# 44-## #44 3# 3:4-4# 4#4- #*3#^ 12# 4-# 444. €4 2:47]# 14433 4^4 ^44 (master
manipulator)# #4 43 2:4-7](slave manipulator^ #414. 4"#4-7]- #34:
#4-4- 32.44# 44# 4^4 &444-3 4-4, 4 44# #°H 44 #<944
4 4-## #44# 5.## #443 S4-44-3. ##. #4 2:4*44 4-1144
144 #44 41# 32.44# 4*14-# 44 41 #4# ##444 44, 41
#4# #44 4# 45.# 1# 4" 144 41# #*34# , 44# ##
# a4#.# 14. 414# 44 444 4 44 #4 1# 447>4 44##
^>#44 4144 43# 4#44, 44# 4a## 4#44 44 2:44# 4
44-7)1 44. 44 2:47]4 44 44# 3.7)1 444 4]4(unilateral control)4
444 7)] 4 (bilateral control)! # 7>4 443. ##44.
4-14-7} 1 43.# /}#4-4 g3 44 43 4# 4#44 444# 44# 444 41443 44- 4 4#4# 3#! 44# 4]4433.4 41# #*34-711 44. 44, 41# #*34# 3#4 7}44# 4 43# 2:47}4t)1 4444 44 44 #4 444 4 t)14# #44 ^*34-# 44 44# 444= 41443 44. 414# 44 43# #44 #414 !44#4 37l, 44 #4 43# 1# #
132.3 4# 41# 44 43# 4## 44 414 4333 #*34 7>#44. 44 4#3 4#44 414471] 34 444-3 #441# 44 43# 444-7] 4# 4# 1#7> 4*344 #4. #4 44M4- 344 4#! #4, 44 444 ?m ## #4 414417)1 414444 144# 44# 4# 444 444-3 #7)] 414444 41# 4# #4 444# 41 #4-4 4# 1#7> #44 4*3 43 14[12,22].
4-44 44 43 433# 41# #*34-7] 44# 4#7} 14. 4# #4
114 #4# 371 4414# #4 44# #4 44-# #4-4 M3 3#4 44
#443# 4# #7))4 -#?)] 43 434 13s. #1# 144 4## 4l7>3
-28-

*2* 944*. 99 #1# 114 **4 #2# *# #*7} 1 499 9#
942, 4# 49 *2# *14 *49 till 449 4*4*. #94 1-4# 9
4 ^#9 49449 *9* 4*17} 9*4 144923. ¥42# *44 #4. 4
1 9 427} 1444 *# 4949 44* 449* 9 144 994 9444
44449 997} #4*4. 44* 49* *4 144 2:44-7} 49#4 44
95-4 *4 s.94 7M49 9 92# 4* 9 14# 9**4 49* *91
4- 44-44 *4* 944 9**9 49 *4- 44 *444 9*4 #2# 4
9449 44 95.4 *4 9 95.7} 9_a_* 4** *4. 24:2 4^4 #}#
*47} *44 44 9499 4* *4494 *4*4 44 44*2. 92* 4 94 2949 *4 19* 9 95.4 *29* 4* *7}#4. *4 49*944 49*9 5.^49 499 9* 49944 94*23.4 *4 ##* 9
* 9 44* 9 12, 44 95.* % 95.4 1*9 #4 41** 94 49*
9*9 149 *442 44 49*944 44* *9 ** *94* 4**23
4 494 2** *4** 9 1*.
4* 94 44 92* *4 * 929 49*7} 2*923. 49* 9sS*
9 12* #* 2#* #*. 2* 9 92# 123. *9 494 99 *7}*9
94423 24*44 9 92# 4**9 #9* 4# 4** * 444 ** # 97} #4 49492 1*[4]. 49*9 2*4 7}449 * 92* 9 44# #
*4 9* 9 1*. *9* 9 44* 4**4 9 92* 99 9*49 *24
47} *44 92, 9 447} 49 999 *92 9*4 9** 9 92* 99
49# 9*7} 1*. 25}jl *423 3.*# 4** 49* 4* 444 4944
4 494*99 *4# ** *A} 3** 4*# 444 44444 49* *4
9 924 *29* 24* #42 9 44* 4**717} 44* 9*2 l*. s,
9 44* 4**4 9 92# 99 9**2 *4*2 #1 **444 49 9*
14 s49* 2*4 7lBj7} 4* 14 149 19 9*49 92# *## 4
— 29 —
444# 44 4322 344 ti-43 "9 414# # * &t)1 4*. 44 444
#>S43 244# 444 44 ### 44 432, 444 444 42# 4*4
4 2*4 44& 32.444 44. 444 2*4 Til 44# 4## 444-71 444
4224 24422 43* *W * 34# #4144 44#4. 4 42# 4#
42 4# 4-0-44 4 44# 4444 4714# 44 #* #44# 3:4422
444# #7>4 *3224 22*41# 7># 44# 4#4# 44:4 3*42 4
4.4# 2*4 #4# 3 442*4 3 *2# 4# 44 444 43 444
2** s.#342, 44711 2#4# 7f# 444 2* 4444 4#4# 4# 41
44224 4 42# 4# 4344. 4 43# 4 442*4 3 42# 44 4
4 #24 42-3114# #3 t 324, 4 447} 4# 4#4 44 4 4 2# 4
424 24# #3 * 34. 2# 2#4 44^# #*22*4 4 42# 4#
#224 434# #412 4 44* 4-0-# * 3# 4#42 4 44* * * 3
7)1 44, 2#7>4 434-4 7147} #42 4442 4344 242244 42
* 34 #7l 4*4 4# 434 4# *42 #444 ##4. #4 244 34
4 434417)] #4 43#444 43# 4# 44 4* *3## *44# 4*
434 #*4 444# *4# 4 *24 3## 44. 44 2444 3 44*
2*4# 434 *47}2, 44 44 3 424 4** #4 4*4 *47} *2
4 *42 4*42 34. 4 44*.*144# 2*4 7}44# 4 42# 3# *
344 42, 2 4#7)1 344 4 42# 24447)1 4## * 32* 4 **
444 247I7} #244.* 3*44* 4 42# 3# 447}* #^# *414 7}##422*4 4
42# *1*471 44 #24#* 7H#42, 4#7)1 344 4 42# ^44417)1
4## * 3# 247I* 4444 7}4 44* 4*4 4 44* *4#* #42
2 44.
— 30 —
2. #* *#
#4 l4 4# *** *5. ## 4^#4 5:4.#3:£l ### -#4 2:#7l* 194844 4## Argonne National Lab.44 44
€ 71442:44# “Model-Mi”44 # * #4. 3 4 2.4# A]*^} #**
44 444 4714 €4 ^447} 7ll#;##24, 195444 44 Argonne
National Lab.44 435 444 414* 44# 444 €4 2:4-714
“Model-El”* 7H*###. 3*4* 4444 €4 2:44* 444-4 €4 34
44 **4* *4# “Model-E3” *4 4* 7H####. *4 196644 44 4 5* "CURV vehicle”# a}*#4 #*3 #4 a] #*5 444 143# 4*4* 4
44* 4 4*44S ###. 4 4a]# 4# 2.4* a}**; 42:4 44-* 44
444 44 2:4*71* 196514 4*4 Brookheaven National Lab.44 42:5.
7H####.
4* #4 4442. 4*-* 444 *44 3**4 44 44 447} *##
4*## 2:714* #4 444 ** *44 444* 44-* 44 *44 €4 2:44 4# 4*7} ##44 4*443. ##. 44 #41 * 45.# #7l 4# 3
425 447}4 * 4a]7} 7M##24, 4# 4** * 44 #34*4 #*•
**7} #4 4*343 #4. 4*44 * 4a* #* 4M# ##35.* strain
gage# FSR(force sensing resistor) *4 #* * *4* 4# A}##*- 44#4-
44# 4si* ##* 4435. 5*4* * *4* 4-g-# * #* 4*4* *
45.# #* * #4. 343. ** #44 4*44=. 5*4 #4 2:44-4 5.# a}
44 7147} # 4*4* * 4 a]* a}*44 # 45.* ###3 4442. 24-7} 44 45.# 4#4* 4 44* a!#4 4* 44Ai a]# 444 ## *444
14*#. 44- 44 * 45.* 4* 4 #44 * 444 4#34 4* *44#* 44# A}*# * #* 4*, 343 4# 444 ## *444 #4#* 4*
* 44#* t}7}4 1*25# 7}# #4* 4*#* **7} 44*3 ##[5,7].
-31-
7H> 9#4 49 4#^ 196094 #9 49 94 A]2|-£]9A4,
7H #^# 44-44 A4447]) 4#9* #44^ 9% 198094 #9 y]tg.
^-t-t^CNASA)^ 49— y^dbCAmes Research Center)*)] 94A] #999 o]
#4^4 198894^ ^2=9 ##^ 7>9 9# 4^99 “RB2”(Reality Built for
Two)7> 994- A]»]^.0.5. 1-55] ^Ai 9449AS 7H- 99 #4 9447)] 5]
^4. 199194^ 944 W.»]c)>:H5]dhA>7> “4^94 4”4A #S]^ #94- 7]]
97]# A7])494. 44 #4 7}# 1# 7]## A444- 7}49 7)197] #4 A]
9*34 5]A 9A4, 4 #-4 349 A44 7]## 4444 2=44-47]] 44 4 44 4444- #4 4a 94. 944 A# # 49- 996)1 99-4 &9# 4-g-
44 M4* #44fe 44A 9*3 4 a &A4, €4 2=4-4 a] a] 4 944 &
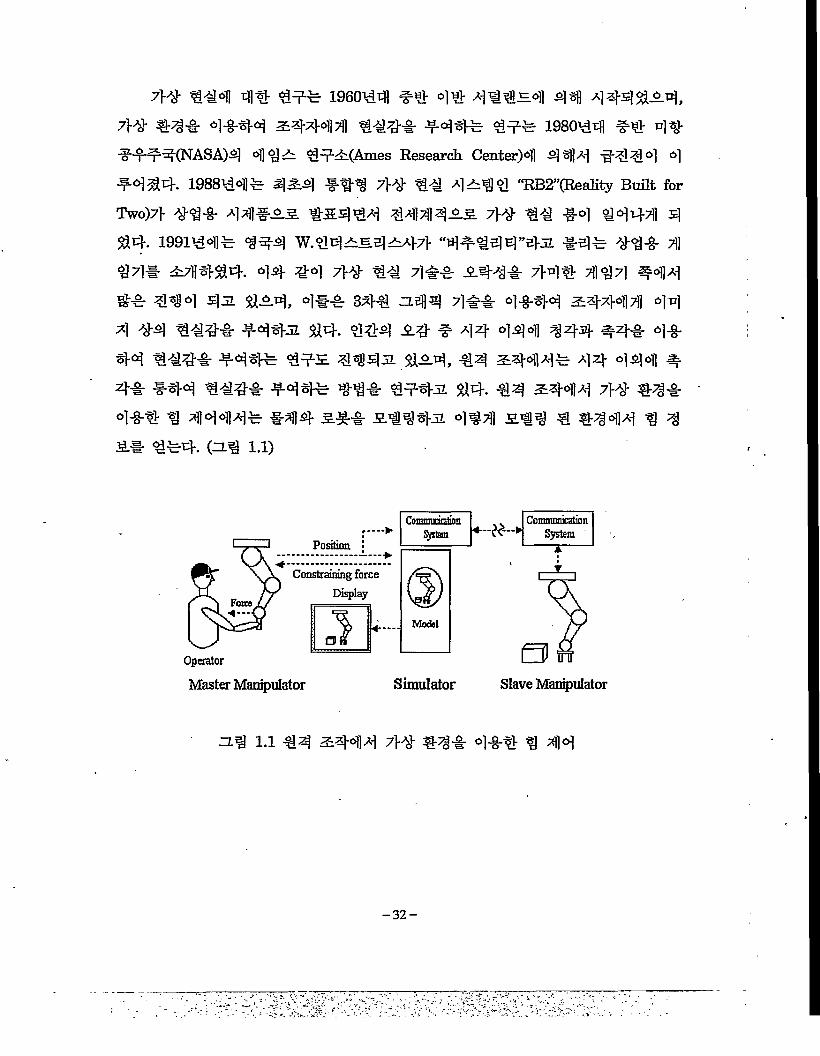
4* #44 9944- #44^ 444- 9#4A 94. 94 2=444 7>4 #94- 44-9 9 444A]# #44 A## a#94a 497)1 a#9 9 #94a] 9 9 A# 9#4. (a9 l.i)
Master Manipulator Simulator Slave Manipulator
a9 1.1 94 a44a] 7># #94- 4-8-9 9 44
-32-
nalJELS % #4# a}*# * &9 9*45 4*444* #44 1 99#
1* * 154 #4 4194 59*} a>o]o] 7iel7> 145 444-s. 9 99#
9## 4 f^}fe a]1: 41 *47} #444 194.
4 St]] 414-6- 51945, 4*444* #44 9 99* ^#49 *54
* 4#4 1 99# 59444 4144 44 54714 414^1 44 49-7} 49
495 14[6,17,19,21]. 4#44 Ml 491-4 #491 (5# l.l)4 14 #
1444- 3.# 44- 5.1144 91994 5.9 44 449 1 45# 45 4*
54AM]4 4145 44. 44-14 59 441 449 1 45# 4444 59*}
9 59 14 44- 4#419 4# 14 1 9 144 914 44* 14 49
94- 49 41* 14 9*3 * 9 14- 444 #4 4*4- 44 94471 1*
14494 *414- 4* 14* 4*9 41449 #4* 45 454 455 1* 9171-7} *A4 *444. 444 41 41449 594 44 449 4
549 594 #54 #444 A}44 4*49 1 95* 544414 4*49
94 *544. 5455 59 fc# 5# 9 45 59 154 4*49 1 95#
544-4 *4 9*49 54714 444 9* 1*7} *5445 9414.
3. 1*4 41* 4 14
1 44# 44a19 594 7M49 1 99* 1* * 141 45, 5 4S
Til 149 1 95# 544-44 9*# * 15# 4 ** 494 5447} 14
1 *4. 9 1*4 Ai 9 1 99# 19 49554 9 44# A}*44 *5 7}#
4955*4 * 99* 19 *54## 711*45, 4%4 1* 9 99# 54a}
44 9*471 44 544* 44414. 9 44* 49 9144 414-4 9 1
5* 1 999 #4* 45 954 955 4* 917} 49 9455 5# 95
* 5.#9 4154, 5# #54 7}449 9 99* 4945 4* 599-4711
-33-
4## # 8^ #34## 2:4## 3448#. 7># #^# 3# #3# 2##
A5. 3#^ ^Ad), 3.5 #3^- 2-DOF# 5# 5* 48#. 444
8, ##4 5.5: fc# 1-DOF# 4# 4*11 344 35- fe## 44 3 48
444 444 #84# 4444 444-4, 4# 44-4 4144-4 4444. 44
4 4^4 34713 44 44 444 35- fcofl 44# 4 835 2-D0F4 4
4 435. 4144838, 4# 347>4 47>44 44484. 5 44444 34
44 47>4 444 4444 344# 4144834 447114 471-433 #44
4 ^3# a.71!- 344-4 #711484.3444 44 4## 441 4# 34 (DC motor)# A)-g-4^34, 34 43
xr 44 414484. 344 33(torque)# 34X|-87ll 4#43 444(backlash)
# 4 34471 448 48# #5(timing belt)4- #4 (pulley)# 4~g-###. 418
4#43# IBM PC 486# Al#4838, PC# 344 484 844183# 44
8 DA 844CDA converter)# AD 444(AD converter), 484(timer), ## S.
^(parallel port) ## #-g-#8 484 ### 33(data conversion board)# 41
448#.
-34-

41 2 # ^ 4M
1. #4 &4714 7fl.fi.
€4 2444 444 444 44 #s3 #4# 44 144 44444 44 4# 30J2.A-KZLB] 2.1), 4# 4# H^7> 44 2:4-7144.
Force.
Operator
Position
Display
Master Manipulator Slave Manipulatoi
=L% 2.1 #4 2:44 7fll
44 24# 4«114# 444 -2.44 4# 44# 44 444 lja.44 4# 444 44 #4, "9 #4, 5-4(proximity) 44 44, 4# 44 -§- 447}X|
4#4 4-8-44. 2# 44 #*,H 1-fi.# 444# #7] 444 44 7>4 4^4144(actuator)## c.]^^- 444 4#444# #4 2:47141
4# 49-4 #-&-# #4#44.
€4 2:444 44 44# 44444 ##, 44 444 44 41, 44 4 44 4#4 444 4#4 44 ##44. °H44Kenergy source)4 ##6)1 44
4 44 414(direct control)4- 44 414(indirect control)!!. 444 44. 44 4
44 7144 2:444 4#41 ### 444 ^4 4414 #9114a 244# #
— 35 —

444fe tit ##4-. 444 44 #4-7} fe ^*4714- 4444 *4 #44
&4A} 4711435 #31 43 2:^714 544* ### # wife ^-T-^lfe 4-B-°l
*7>fe-B>tij-. 44# 4*4fe #511 43 34714 *#-& 444 47l$(electric
power), -f}4"$(hydraulic power), *7l4(pneumatic power) ## 4*4 44 7}
7] 4*444# A}*##} 4*31, 4$711 #51143 3444 #** 4* 444-g* a}*#* 414 ##* 44 7)1445 #4. %7H a}*# 5 ## 44 tfl
**4 #4 344 fe 44 314 $-4.05 #*#4-.
#3143 3:4714 *4* 44 414 $$* iflslfe 444 44-a} 444 4
4 (analytical control)^* #44 4 4 (integrated control)5 4# # $14. 444
44fe 44 414 44(lever)4- 444(joystick), 3-44(switch) #-& A]~g--5}4 4
444 *£, 44, 4 # 444 #$* 4-4-4 443. 44 444* #4* 44
4. 44, 2-fe #4 44* 44-4 443 #444 444fe 44* #44 414
4-2. 44-. 344-7} 44* **34-7Wfe *44 4144 441 #44 4147} 4
44 44444 4^°114 *47} 4$4fe 444 $14.
€4 3444 414 444 **41 $144 7}# *#44 4* 44 444 #*41 44a} 44$: 71144- $=$-$= 4143 4*fe 444. 4W 4144 414
4$ 4 434 3:4-714A} *4 4 ti. 2:47134 4444 4*4 4134 34714
446]i 4@n #5))43 34714 447} 7)144# #3# #44. #W 414fe 7)
71144 *37} 4442 4144-717} 44 fe 4#3# 3*44 #fe 444 #4a}*4jl $}ti}. #$•#= t)1 4fe 44#4 4^H #51143 34714 7}414fe 4* 4-
a] 434 347]s. 4444 344-7} zl $# 5# # $}54 #fe #444. #
W 7)14# a}*4# 547}fe $ 43# *41 44# 7)144 441 4* 444
##4* 3# * 42, 432.# 44* *W * 44.
-36-

2. 2#7l4 ^
4W 4M44fe 4 421- 247MMI 4ft *r safe 247l7> #244.
€4 2444 #44# 92# (2l 2.2)4 #4.
Master Manipulator Slave Manipulator
> Controller
2# 2.2 #4 24714 f2
*114 4# 424 5:4-714 #442 24-7129-4 #*114 444 4 42#
B14#4 4#, 44# 44 tosl## ^44 4 244# 9#49|7l 4# 2EL# #4#4. 44 42# ^7l 4414fe #7}4 (incremental encoder),
444 ^124(absolute encoder), resolver, potentiometer #4 44 #47} A}-g-
44. 25l2 "9 42# ^7l 4#4fe strain gage#- FSR(force sensing resistor)
# 7}44 "94 27141 444 #714 #4°1 44fe #4# ^l#-47l4, 2441
*5# 4# 4# 44- 4iHH44 4-4 44# ## #444 44425. 4# 7jl#4fe 44, 24el #4# 44# 4 9 244 444 44 44(steady
state) 44 2424 444 4# #44fe 44 #°1 $14. 44 424# 4#
4# 44425 5.14 44.
— 37 —

(2.1)TT T d , T3 ddm 6mUm Jm d? +Bm dt +Fm i e'\ + m
Us~Js Vi +Bs ddt +Fs | % +Ts(2.2)
4741,
Um,Us: 4244 #31411 2:4714 7}44# 5.H. 44 4^
0m, 0S: 4244 ^l°ia 2:4-714 4- 44
/m,/s: 4244 #314 £ 2:444 44 ate
Bm,Bs: 4244 #314 £ 2:444 44 4# 4#
Fm, Fs: 4^44 #314£ 2:4-714 ##- 4# 4#
rm : 424 2:4717} &47}44 7}4# E3.
rs: *4 4£ 2:4-47} 44#4 7}4# £3.44.
4 2444 #4 a4£4 44 4# 4# 3.43. ## 4# 4## 247I
4 4-8-4# 4#4444 24*4 444 ?144# 444 444 4444. 414
444 (7m4 Z7S^- Ai-g-s]^- 414 #24#4 444 44 4:444 4 #31, #4
4£ 24714 7}44# 44 44aa #444 C/m4 UM 444^ 7}4
444 444 44 44# 24 44-44 44(position-position control)# 44-
4 4 4(position-force controls. 444 44.
-38-

3. 44-44 414
44-44 44 M4 (zi^ 2.3)4 44.
Master Manipulator Slave Manipulator
Force Ratio
PID Controller
zi4 2.3 44-44 >1144 9^2.
4 9^3=44 S.94 44-44 44 ti<M44xr 4^4 ^444 #44s.
2:471 444 44 -£-4-7} 444 49 4 ^-4# #4^ B^s 4^4 ^44
4- #4 4s. 2:447} 44 41444. 4, #414s. 2:444 44^ 4^4 2:44
4 4^14, 445. 42:4 2:444 44^ #44s. 2:444 444 4444. 4 44S.S. pid 4444 PD 4447} ^s. A}944, pid 444# 49449 4
9 41444 #4 C7m4 t7s4 444 494 44.
Um = KPm(6s-em)+Kdm(< 6S— dm) + Kimf(&s—ejdt (2.3)
Us = Kpsidn-ds) +Kds{ Qm- es) +Kisf(dm-6M (2.4)
-39-
4714,
Kpn.K# : 45* 5#44- *5)145 S:*** ** C|S.
K'te.Kz : 45* 5*44- *sll45 5*714 4¥ 4#
A^.-K* : 45* 5*714- W45 5*-44 ## 4444.
444 444 45*4 2.44 **55 rising time, overshoot, settling
time 4 ¥44 #4 444 44445.4 4444. 4 444 444 7)14454
444, *445 54441 7}44¥ 4 #4* 4# 4 44* ^}¥*4 &¥*. zl45 444 41471 #4* #** 45 *¥4 ¥ 54441 7}41¥7l 41 ¥41 4
4717} 444: #5# 44. 444 ¥57} 4¥ ****, 45* 5*714- *5114
S. 2^4-717} 44455. 414471 4¥4 45*4 *¥ *4(stable)**-¥ 444
44. 444: 4 444 44¥ 5*7}7} 54¥ 44 4415 *5)145 5*714
7}44¥ 44 454¥ 444- 5*4-7} 5*¥ 4¥ ¥ 544 444 44 5
4-6)1 4414* 44455 547I 7}A))4 7144 *#*, 4*444 414 *#*
¥4¥ ¥444 7)147} 4¥44 *7)]5 5*7}47)1 #445 54-44 7}44¥
*¥ 44-4-tII 4*# * &t)1 44-.4-4* 44* 4445 #¥4-5, 44-44 7)14 *4¥ ¥57} 4¥ ***
5 7)147} *4¥ 4* 41¥^1, 454 444 *W 7)14 44 54*4*
“Model-Bl’XArgonne National Lab., USA)* 4¥*4 *4*4 7}¥45 *¥ tfl
¥¥4 44 5447} 4 *4* 44*5 **.
4. 44-* 444** *4 4*4 *7}¥#t}¥ 44-44 44 *44 '*4* 44*71 4
*4 1965* 4¥ BrooKheaven National Lab.4 Carl Flatau7} 455 44-*
— 40 —

44 #1# 411S11-. 14-1 44 #11 (zz.1 2.4)4 #4.
MasterManipulator
SlaveManipulator
PDD Controller
PID Controller
zz.1 2.4 14-1 444 tts.
4 #144 *44s. ^14^ 4^1 2:444 444 44 4444, 4^
4 2:4-4^ #44s. 2:4444 ##1 14 444 1 4444-. #44s.
44 4-44 1# #44-4 4^1 ^147} 4 1# 2:#44- 1# 7>1^ 1-1=4
14 ##s.3. 444-s# 1-s.s.4 2:14# #4 #4 4S. s#44 7>41 1#
14-4-4 ## # $14. 44-4 14-14 44 1444 #47} s)$pa 2:141
111 4 11 #111 11 1# #4# 41# # $11. Pro 444# 4_&! $&# 41 4441 #4# 111- #1.
— 41 —
Um = K^Ts-Tm) +Kdm( ts— rm)+Kimf(rs—rm)dt (2.5)
Us = KPs(dm—d^) + K&i 6m — Os) +Kisf(&m~8s)dt (2.6)
ZLSl^ O] 7)14 SH4 44‘44 414 tilSflAl
a] 4 -g-(unstable)41 # 7}^Aj 4 -3.4^" 4 $)4". 414 f5. 4*
4]7]- 44*44 4144^ 444444 positive feedback^ 4-2- &4a), 3= ^714 44 a]^(response time)4 4*4 7> 4°1 44 44 ^-47} 444
#7}, T 5:4-7] A>o]4 AlJ: 4^0] 47]7]] 44 4 ^(oscillation) 4 1)44-71 4-5-
44-. 4 tiJ-44r 4-4^4£ 414 M43. 44-44 4144 444 44=4-
44: 44^! t4]5. ^415. %4 &44^ #3. S14-E21].
— 42 —

41 3 4. 7H> 4-Mr % 4M
1. 7}# ##4 44
7}# ### 4#44 44 #^4 #$]#}2 ^3L ###224 2 4
Till- ^4# 44- ###. # ^#44 447}4 #4## ^l#4-4
7}# 444 #Til^ #4# 22, #31, #431, 4 #4# # #s# ## ^°14.
7H- ##4 4# ### 1960#4 ## 4# A^fcofl 44 a]####. 7}#
### ## 4 Til 4 424*4 2.711 ##4 #4, ^#4 #4, 2# 2 #3l4-#4
#45- ####[22],
4#4 ##4 #4# #444A] #44-# 44- 7}# 444A] 22, #2,
24# 44 #4## #4 2 a] 7}# LtMH ol## ## #24- 44# ##
&# #444. ##4 ^#4 #4# 7># #^44 #4# #4€4 #44 #2
##4 #44 ##7}# #2 2 7># ## 444 THff-4 4# #4# 4##
# ## #444- 4#4 #2##4 #4# 7># ### #45.4 7># ## 4
44 #4# #4# ##442, 2 #^4- 44-4-2, ^#4-2, 7B44-# #4 ?1
## #4 7># #4 %M1# #4-4# # $1# #44#.2:44-44 #4#25. 2444- ##4-27} 4# ### ##44 a]## 7}
# ### ## # #4, 2# # 42444, 4#, 24-, 242 #4 2# # a}
4 44 #444 ###2 $}24, #25 44- #4# ##44[9,16].
2. #44-4 4# 47M#
a}#4 #4* ## 4 ## 42# 4 #4 ## €4# 24
mechanoreceptor4* proprioception 44-2 4# #7}7] 47}##4 44 4#4#4* [22].
mechanoreceptor# #47} 24# A}#4 4# 2#44 #% #24 4#
-43-
#5# 4 #4 ^# 47M#55# #zl# #4- 44 5#
4 444, 4# l^l- 44 ### 44 4r-#4 ##4#4 4% 5#7)4 4 7>ir #4# 4 #4s# #44 #5# 5## 44 444- 4# #5.4 4
4# #44# 4 #4 444 #4 4- 44 proprioception# ##4 ##5## t 44 45# 4#4 4# 444#5^.4 #4] #4- pfl 7fl# #444# #
44# 54# #444, 5-E44- 44# ## ## 4 54# l^s. #
s# #0)1 4#S># 4#4 455. #### # #4 444 #4 4. #4 5#44
7># ### 4#44 5#7H)7i] # #5# ##4-5 ##4# ### #5
proprioception 4 7}4 ## 4#44 4#4 44.
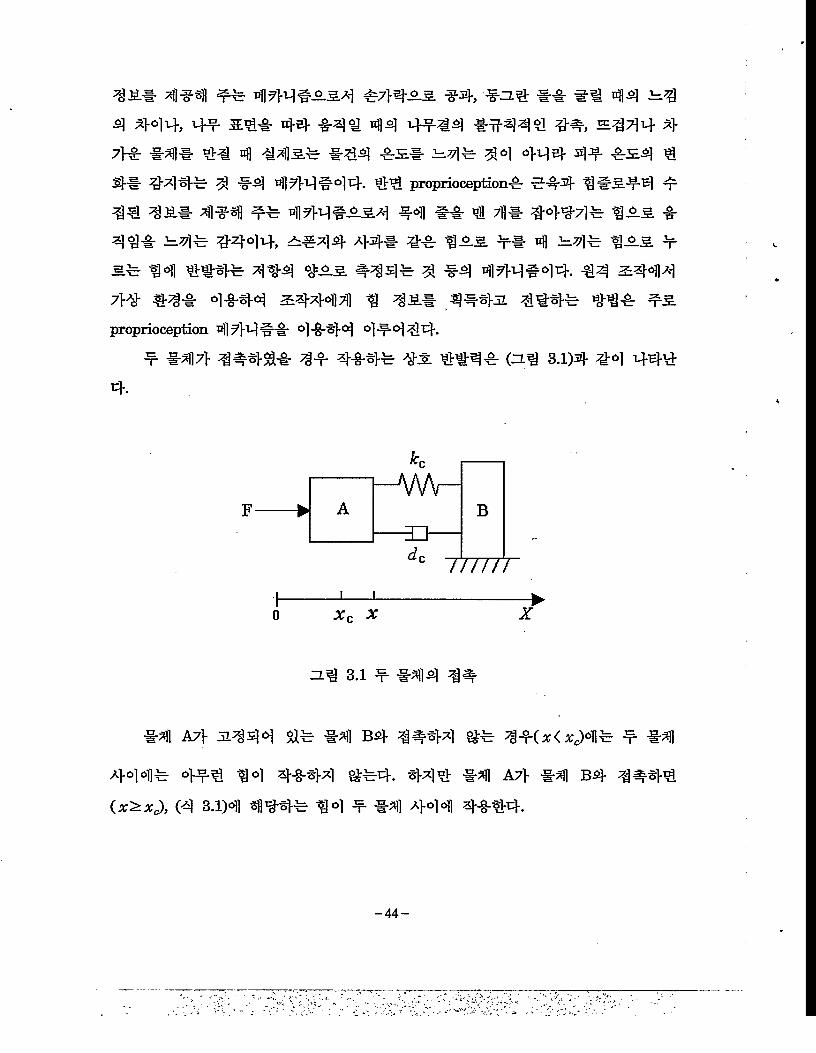
# #47} ##48# ## ##4# #5 #### (5# 3.1)4 #4 444
4.
—V\A/—#3-
B
777777
0 %c Z
ZL# 3.1 # #44 #4
#4 A7> 31#5)4 8# #4 B4 ##44 ## 4#(x<xc)4# # #4
444# 4#4 #4 ##44 . 44# #4 A7> #4 B4 #44#
(x>xcl (4 3.1)4 444# #4 # #4 444 ##44.
— 44 —
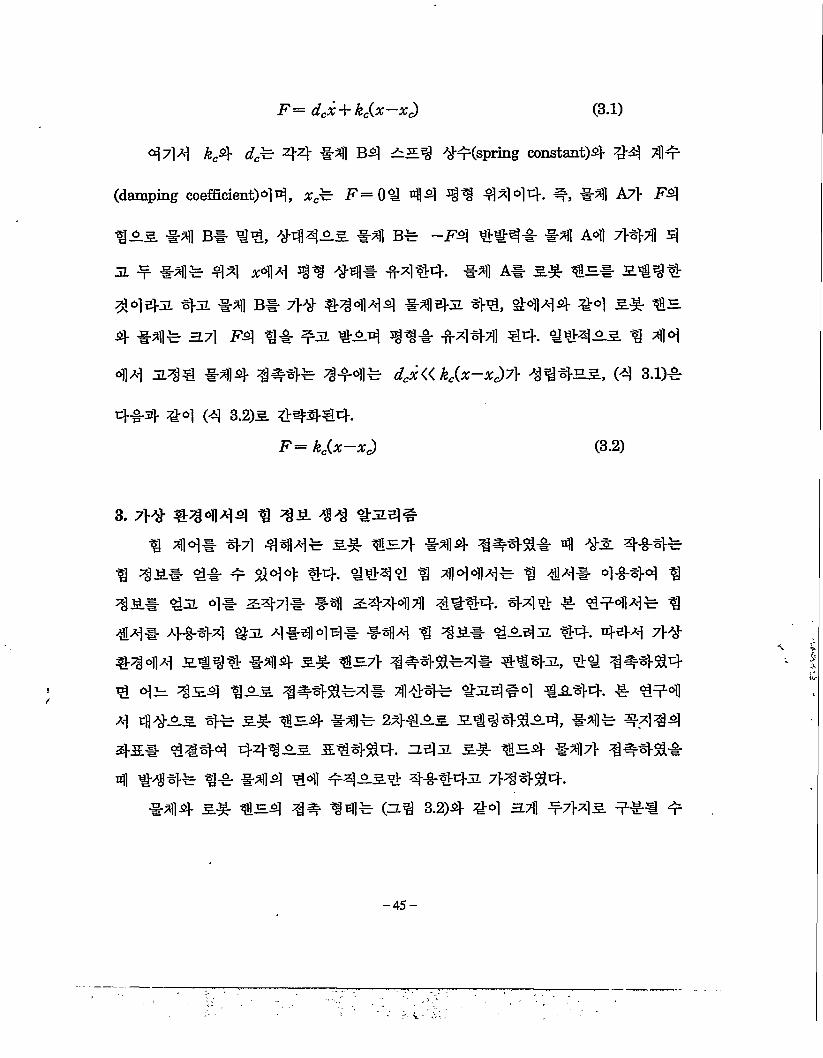
F = dcx + kc(x—x^) (3.1)
4 7] 4 kcQ d^E: 44 #4 Bd\ 554 14(sprmg constant)^- 44 4#
(damping coefficient)0] 4, xc?E- F= 0# 44 11 44 °]4- #, #4 A7> F4
#53 #4 B# €#, #4453 #4 B# —F4 €€4# #4 A# 7}44 5]
2. # #4# 44 *44 3gi§ #4# #444. #4 A# 3# te# 5.1^tt
4443 #4 B# 7># €14 A] 4 #443 4#, €444 €4 5.^. #5.
4 #4# 3.7] F4 ## #3 €54 11# #444 €4. #€453 1 44
44 3l# #44 !#4# 1#4# 4*« ^-^7> 11453, (4 3.1)4
4#4 #4 (4 3.2)5. 44444.
F= kc(x-x} (3.2)
3. 7>4- #4444 1 45. 44 te4#
4 44# 47] 444# 5# #57} #44 144^# 4 #3 444#
18 45# 4# # €44 44 #444 1 4444# 1 44# 4#44 1
45# te 4# 344# #4 34444 4444. 444 # ##44# 1
44# 4#44 #3 4 #4 4 4# #44 1 45# #343 -#4. 444 7}##444 3#4 4 #44 3# #57} 1#4£#4# #€4-3, €# 144^4€ #3 454 153 144# 444# #3S]#4 #344. # 444
4 4455 4# 5# #54 #4# 24#53 3#14$54, #4# #444
43L# €#44 44153 #€4€4. 3s]3 3# te4 #47} 1#4£#
4 €44# 1# #44 €4 #453# 44443 7}14£4.
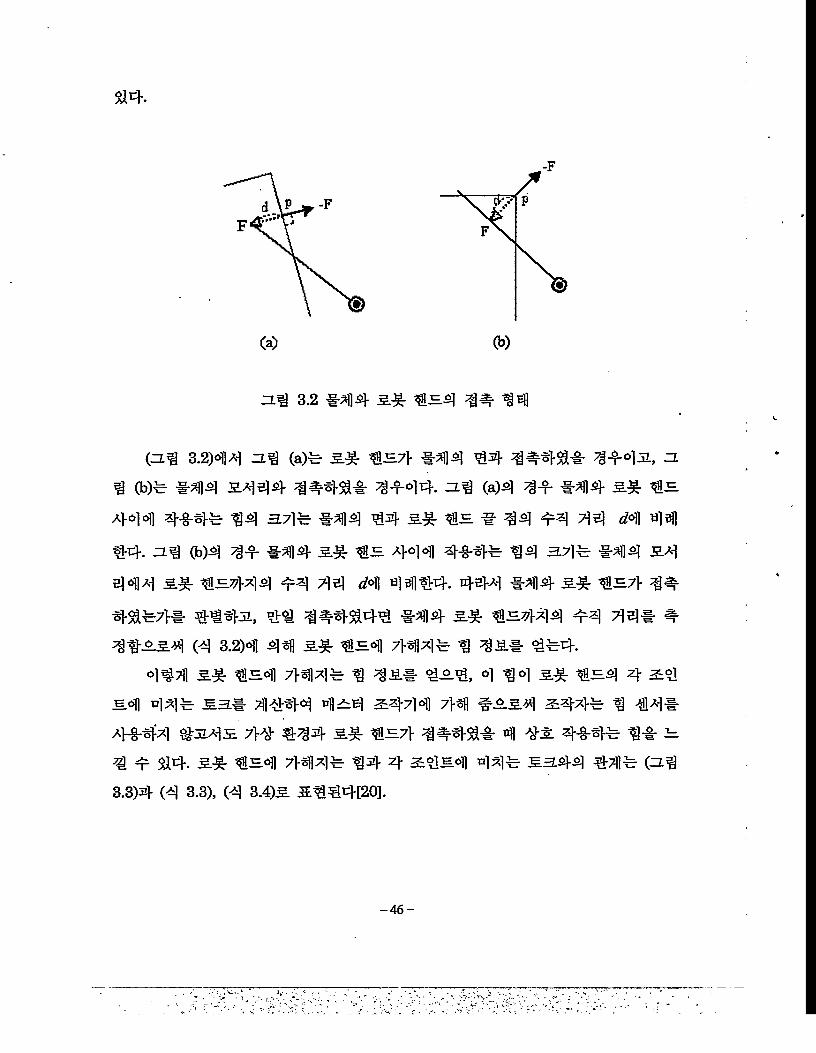
#44 5# #34 4# 14# (35] 3.2)4 44 34 #7}a]3 ### #
— 45 —
(b)(a)
3^ 3.2 #44 35: #34 1# ^Bfl
(ZL^ 3.2)4 ZL^ (a)# 5.5: #37} #44 14" 1#48# l-f43, ZL
1 (b)# #44 S-444- 3#4-8# 1#44. ZL^ (a)4 1-f #44- 3.5- #3
a}44 4##}# 114 H7lxr #44 14 3.5: #3 # 44 4=4 44 d*\] 44
#4-. zl4 (b)4 4# #44 3.5- #3 AM4 4#4# 14 34# #44 3.4
444 3.5- #3444 #4 44 rf4 4444. 444 #44 3.5: #37} 1#
48#7}# #14-3, 11 1#4841 #44 3.5- #3444 4=4 44# #
41354 (4 3.2)4 44 3.5- #34 7}#4# 1 13# !#4.414 55: #34 7}# 4# 1 13# #31, 4 #o] 5.5- #34 4 31
34 44# 33# 4#44 434 3444 7>4 #354 34-%}# 1 #4#
A}##4 &345E. 7}# #14- 55- #37} 1#-b}8# 4 #3 4#4# 1# 3
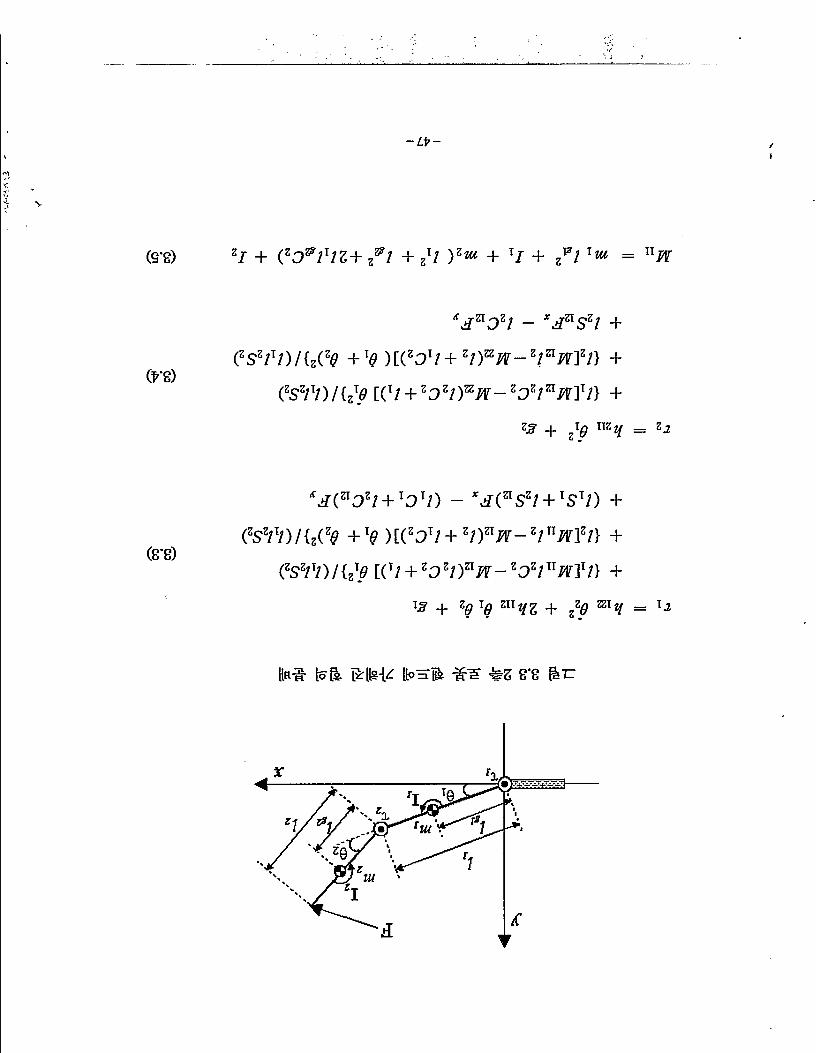
1 4= 84-. 35: #34 7}44# 14- 4 3134 44# 3344 #4# (z| 3.3)4 (4 3.3), (4 3.4)3 Xl#4[20].
— 46 —
- Lp- /i
v
(98) ZI + (zJ??lllZ+ fl + zxl )z™ + XI + zx*l
- x^szl +
(zszix2)I{zCq + x9 )[{zDli + ziyzn-zizlnfi} +(^8)
(ZSZ!X!)/{ZX9 [(T/ + ZDZ1)ZZH-zDzlzlM^l) +
z3 + ZT# nziy =
‘C^(ZT0Z/ + TC>1/) - r^(2ISz/ + TST/) +
(zSz/T/)/(z(z0 + T0 )[(Z0T/ + z/)ZTjV-z/IW/> +(88)
?szixi)l{zx? iCi + zozi)zln-zDzixxmxi} +
^ + ZQ T0 + ZZ9 mH = t-2
ttn-g- tp& 12:lioH^ ^ 8*8 far:

^12 = ^21 = W2( ^s22 + 4^C2) + /2 (3.6)
M 22 = w2 /^2 + /2 (3.7)
1*122 = A 112 = -A 211 = -W 2^ l^5 2 (3.8)
STl = ^igT/^Ci. + w2g"(ZiCi (3.9)
& 2 = (3.10)
4714,
4, 4 : 434 44
»»1, *»2 : 434 4#
4i»4z : 434 44 #44-44 44
4,4 : 434 44 #44 7M4# 44
Fx,Fy : 4 -F4 x4#4 y4#
Si, Ci,, S2, C2 : sin ^, cos 6t, sin02, cos #2
Si2, c12 : sin(0! + 02), cos(d1 + d2)
' g : #4 7>4S-°14.
4 7)14 ^o))A) 4% 4-444# a# 434 ste 4# 6i, $2
a.X) &T}. ZLH)3L, ZL^ 3.34 #4 4*37> %-y 444 *4 $143 7>4^ 434 #6] 7Hr5LS) 444 <ti44H.S. #4 7Hr34 44& #4
-48-

zlbIhs. (4 3.3)4 (4 3.4)i=r 4&4 44 (4 3.11)4 (4 3.12)5. 444
€4.
tl = (liS1 + l2Sn)Fx — (/i Cx + l2Cn)F y (3.11)
r2 = ^2^izFx ~ 12C12Fy (3.12)
7>4 44414 ^ 45-1- 4444 (nl 3.4)4 4
4.
.contact?
master position
object position
Master Manipulator
zz4 3.4 7>4 #444 ^ <9tt 44 J:#£
-49-
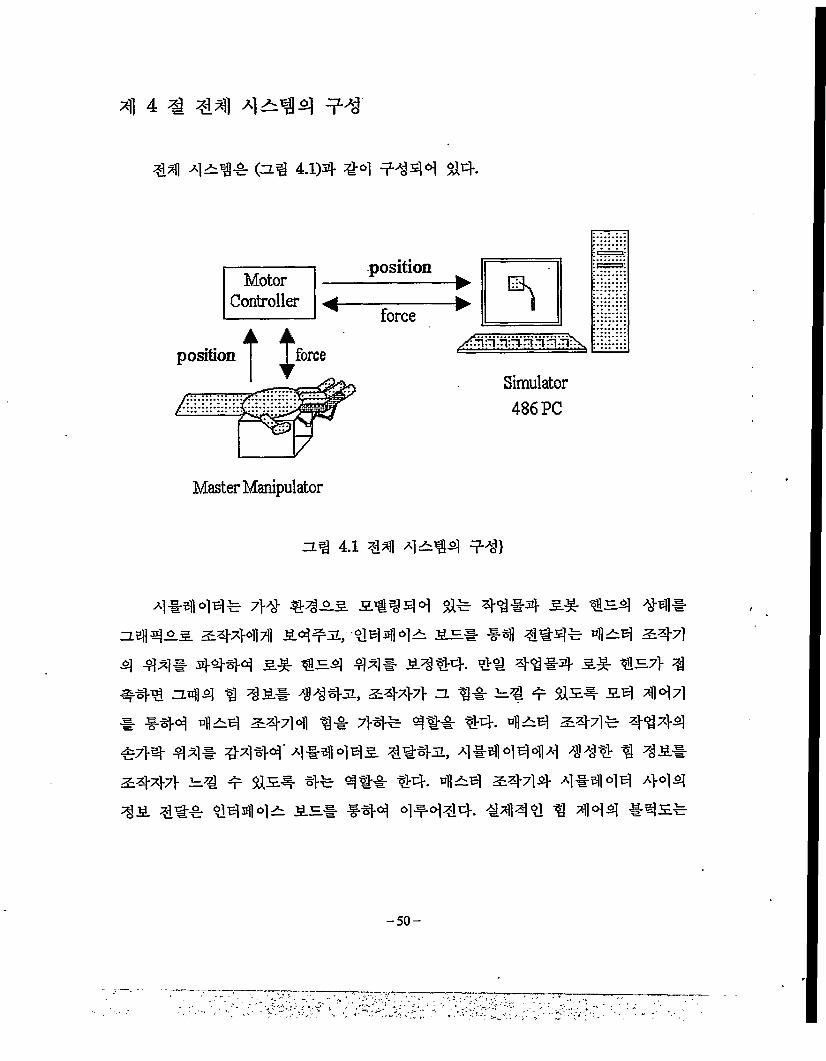
441 4^1# 4.1)4 44 9-444 $14.
MotorController <
position
Master Manipulator
position
force
1
AA ®1
i-i:i'i:j
^r.-Tl 4 :n:q. rf :ii iri .TTI-S. I-!::-!:!
Simulator 486 PC
n-t 4.1 4*11 4 ^#4 94}
415114 4 ^ 7>4- 14^-5. 5#444 $1^ 4414- 5# 4-4#
zl44^-5. 547MMI 54931, 4444^ 55# #4 4#4# 4^4 5#7l
4 44# 4-44-4 5# 44# 54 W. 4114- 5# #5.7} 4
#41 ZL4I4 1 45# 444-31, 2^7} a. H M 1 &5# 5.4 4471
# #4-4 2:4-714 1# 7>4-fe 4## W. 4^4 M-4# 41
W4 44# 4-714-4' 41444s. 4#4-31, 41-40140114 #^4 4 45#
544-7> M ^ $15.# 4-# 4"t# W. 54714 4151144 4-44
45 4## 4444^ 55# #4-4 4#444. 14144 4 4144 #45#
-50-

(5* 4.2)4 44**4.
force'em
FGA
Xm
—► jT —MX)—► PID Fd ----- Te
K,position
zz# 4.2 * 444 1-45
1. *141444*4445* IBM PC 486* *-#4$4. 4*444* 24*55 5#*
514 $1* 44 #4 *44- 5* *5# zz.4455 54444 44*55.4 54
44 4444 44* 44# 9 45* **4. *41* 44*4 4M 4*55.
*44* 44*55 5**444 €44 4*55 4144 1*4 €4 44*
4 4* 1** 44*4 4# #4 4*#554 44*55 4*4 # ^ 44.
44*4 €44* *** 444 44*4* *444 *4 €4##55 #47}
* **5 1*# 44*5# 4 $4.
5# *54 4*7} *#4^1* 7}# *14* e*5 ** 44##55 4
44 *4- 1*4 5# *57} €#44 1*4 *4* 4*4 5# *5* 4#
*55 a* 5)54 44 5444 1*4 *44^*4# €* €1# 1 45#
4454, 1*4 5# *54*4 44 44# **4-5 (4 3.2)4 44 * *5
* *#*4. 4#* f* # *5# (4 3.11)4 (4 3.12)* 4*44 5# *54
4 5*5* *#4tt 55# 4*4. 55- *5* 5# #4 144* *#455
— 51 -
3.# #44 444 ^4 #444 44 #4#4 3^ te4
44s. 11:444. # 4-^44^ 3£ te4 4 4 ‘HI- #4^-3 s}^aes s#- #4 -§-44-8: 4S.=4 44# #4)4 &4444.
n4 4.3 4 #4] 444 44.
-52-
2. 4^4
# 4944^ 44-4 4-S-^Hr 4^4 s44# 4 444 A
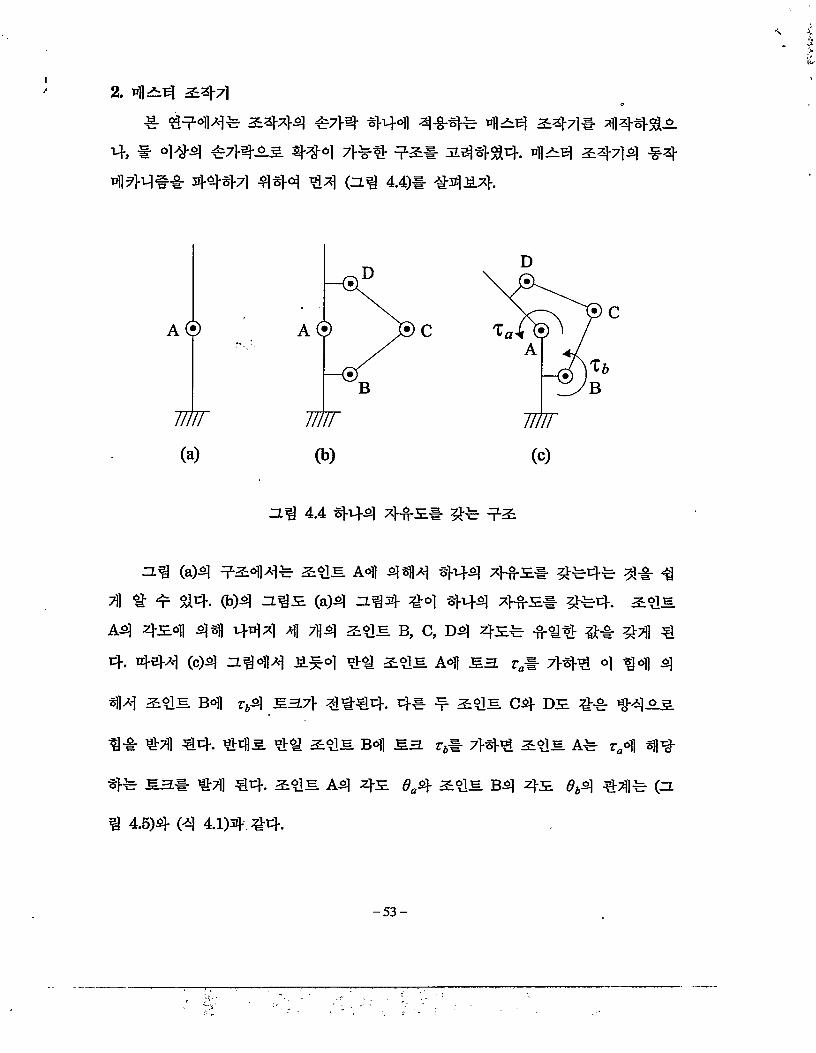
4-, # °H4 £7>4S3. #44 7>#4 9S# 3.44^4. 4^4 5:4714 #4 47>4#-i- 4444 444 #4 (a^ 4.4)1- #4M.
A ®
7^y
(a) (b)
D
(c)
a 4 4.4 44-4 443c.# 4^- 95.
a4 (a)4 92:444=- 26Jh A4 444 44-4 4^4^ 4# ^4 4 9 44. (b)4 a^s. (a)4 zi^4 ^o\ x>#h# 3-^4. 24mA4 424 44 4-44 4 7iJ4 s4s B, C, D4 4-2^ f-^4 4* 44 4
4. 444 (c)4 zl^44 s.^o] 44 245. A4 sa ra# 7>44 4 ^4 4
44 5:4s B4 r64 sa7> 4#44. 4# 9 5:4s C4 D2 4-B- 44
#-& 44- 44s 44 5:4s B4 sa z-6# 7>44 5°Js A^ ra4 44
4fe sa# 44 44. 2?ls A4 4s 0a4 a4s B4 4-2 06a] #4^ (a
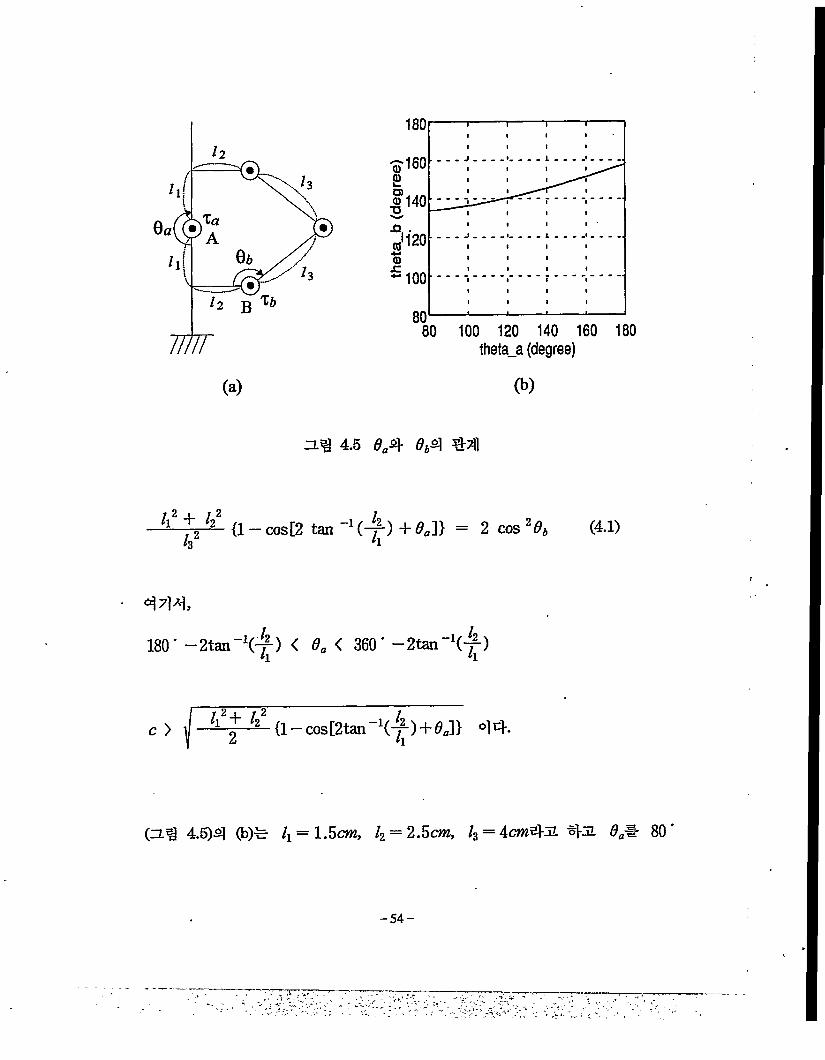
g 4.5)4 (4 4.1)4; 44.
— 53 —
80 100 120 140 160 180theta_a (degree)
(b)
=l% 4.5 ea$c 6b$\
t-J-2- U - cos [2 tan (-f) + 0J> = 2 cos % (4.1)<3 *1
47M,
180* -2tan-1(-f) < ^ < 360* -2tan"1(-^-)*i *i
c > J ^ ^ {l — cos[2tan + 44.
(zl^ 4.5)4 (b)fe /i = 1.5cm, h = 2.5cm, /3 = 4c#z43i #3. 50-i- 80*
-54-
44 180' 44 ##aM# 44 064 ### 44# #44. 4
4 A0O « 5- A064 #47} $I&& # ^ #4. 444 ra ^ y • r64 #47}
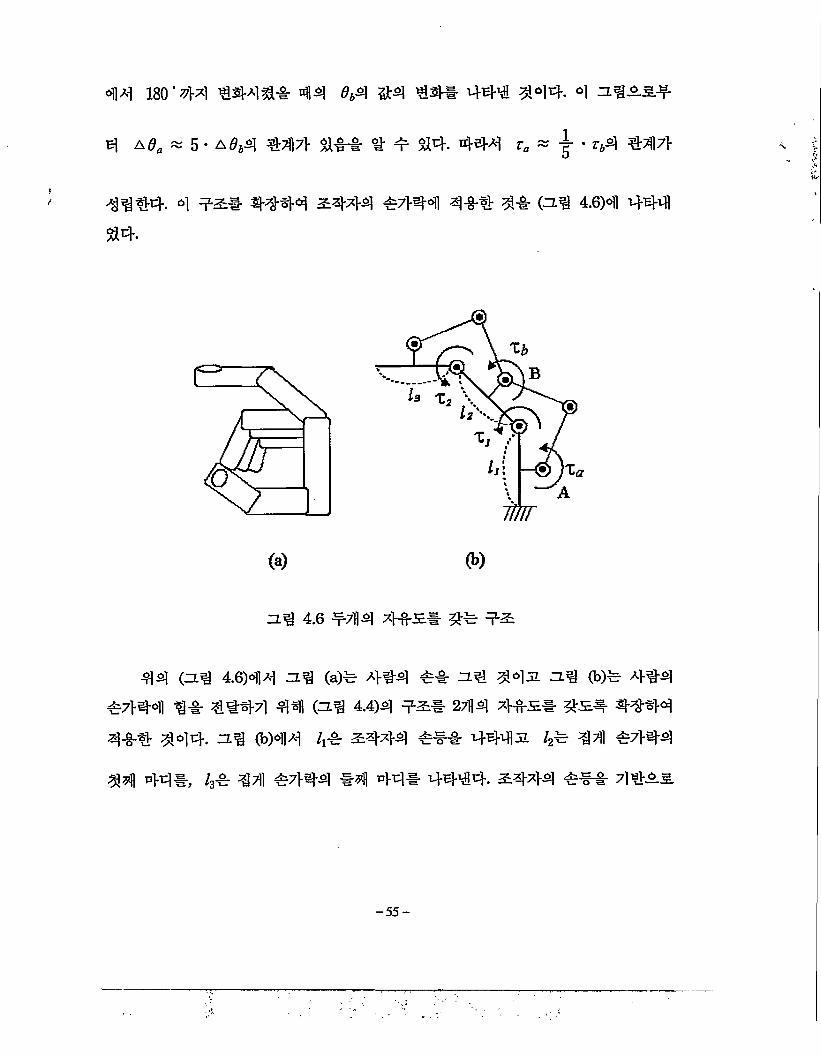
###4. 4 f&# ##44 M £7}§H #-§-# 44- (zL^ 4.6)4 444
#4.
zl# 4.6 #?H4 4-8-5=# #-#
414 (zz# 4.6)44 zil (a)# 444 ## zl# 4°lzi ZL^ (b)# 4#4
#7}#4 4# ##44 #4 (n# 4.4)4 f&# 244 4-8-A# #A# ##44
#-8-4 #44. zl# (b)44 44 244-4 ### 4443. /2# #4 #7}#4
#4 44#, /3# #4 #7}#4 #4 44# 44#4- 3~#44 ### 4#as.
-55-

44 #7>4 444 Zi4 44434 # 4-t-4# 5£5 A4 r04
5a# 44^4 44. 447>45 #44 #7}4 444 r24 4# 44434 #
' 4-T-4# 3£5 B4 r64 I2t 44#£ 44-.
4- 4444 4-8-4 4^4 344# 444 #5# #44 3444 #7>4
4 4# 4## # £5.# 444S4-. 344# 4 3143 444 4 3tH 444
#4-443. 4-8-4 # &5# 44471 444 4^4 5447} 4# 34 £r5#
344£4. 4^4 3:4714 4 3434 £# #4## 4 314 (backlash)# #4
7l 444 4-44 #35 444£4. aela 54444 4& 4OT4- #44 #
7>44 44 45.1- £71 444 4# 3.44- te47> 444 3454 444 #
53 M44 £4. 3.44 #44 £:4# 1:15. 4&34, 4 ^34 £4# 4cm
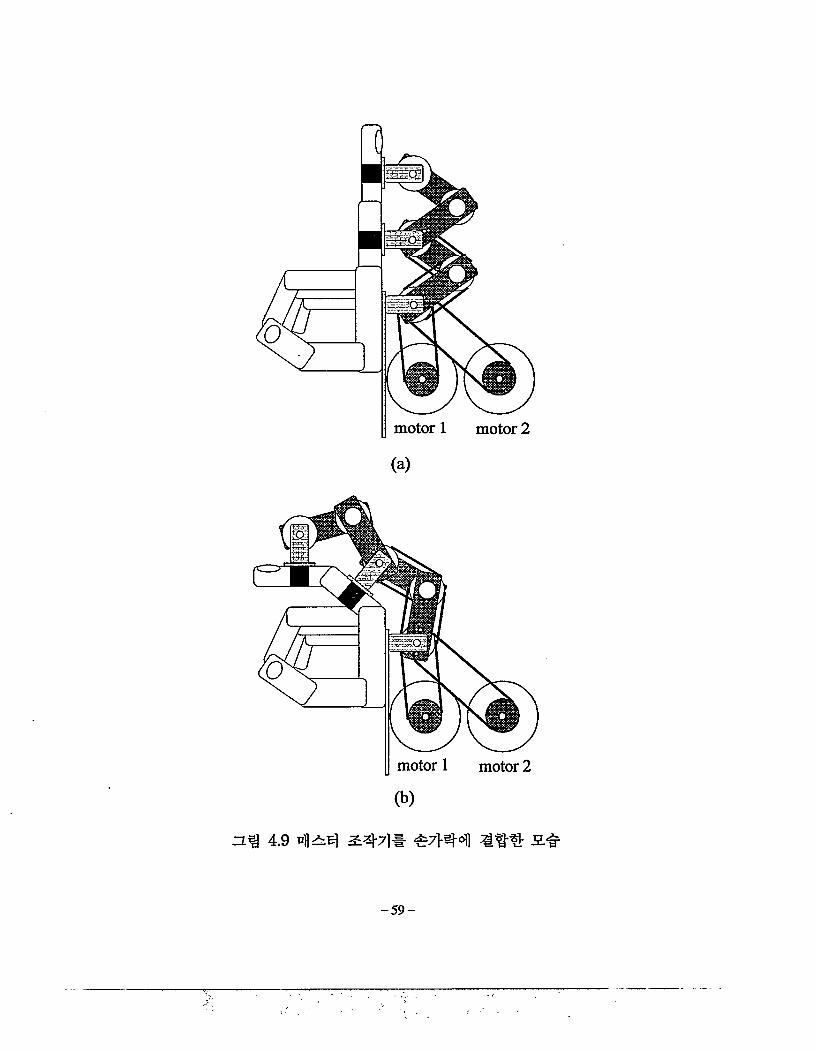
5 #£44 444£4. 4^4 5444 #3# (a4 4.7)4 (3£ 4.8)4 444
£4.(a4 4.7)# 454 2:44# £44 # 443, (a4 4.8)# 4444 # 4
44. (3^ 4.8)4 (a)# 44£ #5# 44 #4# 44 3#43, (b)# 44£
#5# 4£# 44 3#44- 34a (a^ 4.9)# 454 544# 5444 #7}
44 a444a #44# 44 3## 44£4.
— 56 —

I/
57
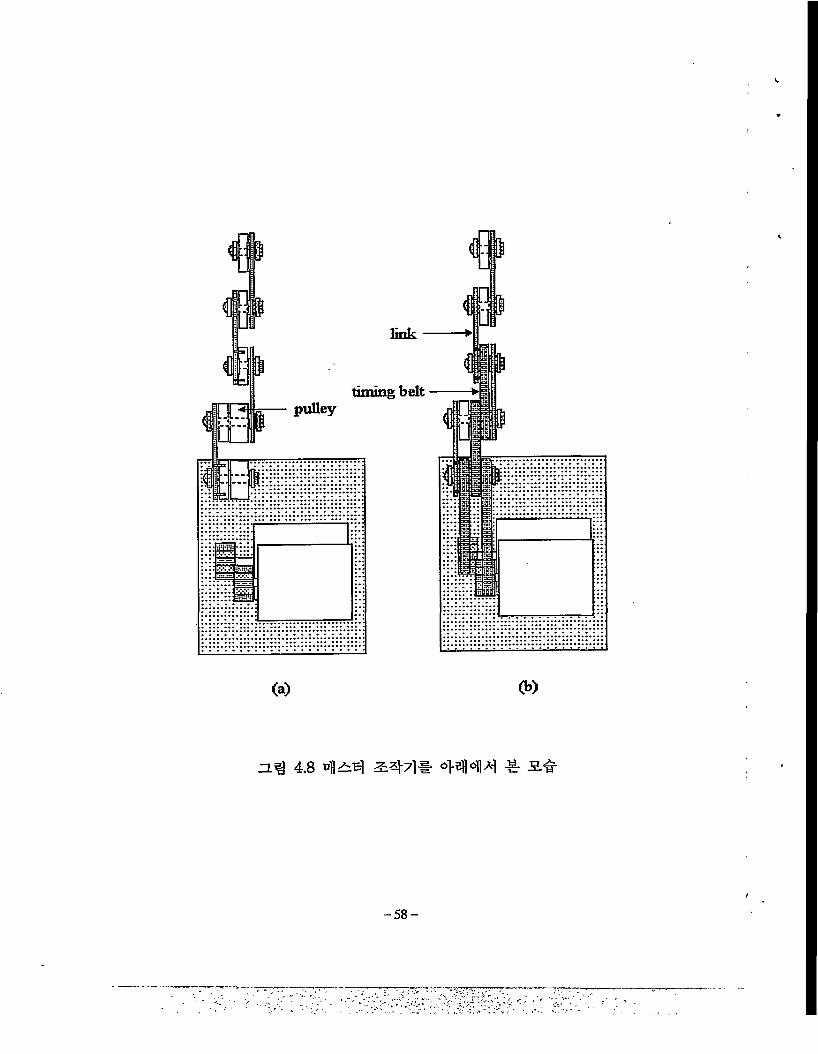
4.8 4^ 3^7)# 44MH 2.^
motor 1 motor 2
motor 1 motor 2
ZLH 4.9 5:4-711- ^71-4-4 4ft 5.^
-59-
4.10 nfl^ 5^1-711- 4^1 fl^ 5#
— 60 —

3. 24 42 ^ #4442 33.
4*4444# 4## £3f 4^4 2#7l2 4#4^, 4^4 2:4-713.4
4 2:4v# ^7>4 444 S4-44 £7}4-4 7>s>3i 22 #2* ##
4442 4#47] 444* ##* 44442 447> #24-4.
7>. 2-4 #2
2-4 #2* #*4442*4 44# 22* 2#-#-4tI1 444-71 444 4
2x4 2:4-714 #444 8^ 4# 241- **## 4#* #4-. 84# #44-8
*4 424 24-714^ # #2# 244-44 4#44 4# 4# 247> *7fl &
4. ##-4444# ##€ 22* DA 444* *4 24 #22 *#44-. 24
#24 422ie (24 411)4 4-4-484.
IDflC >MOTOR DC0P90
—Vcc
5.6K
2# 4.11 24 #24 422
a] 4344 344 ±VCC= ±24 V4 3 DA 4
ti^Bll- #4 A] £E ^£7} 444 PNP transister S3 4
37} -&aM NPN transister Q2» #44 4# 2.44 4#7} 337]] #t}. SB]
4 Jl3# S3 :§34 37H 444-3, S3 *j37} 0<ti 44# 43 %>
fAl£ ^#7} JlSA] g#4. o] ^^d)]A^ A}## SB] a] tfl^- 7)%# 18£4
3, 2.44 I2H 4=f #^#?1 4#4 3124 A]^is 7HHi?4)^- ^#^4-.
44^1 44 ±1.14As] 344 ## 4s S14.
4. ^ 4s
4#314444 4## £37} 34444 44£ 44:43 $1#%]# #*j#
3, #4 444 £34 44 }44 7}44# £37} 4# ^#4# 4# £
4A44 44. 4# 444# 4=±B] 3#7]# #4 #4 34-4-44 4#4
# £3f #4## 4 £7} S14°> #4. }44 444# £3# 4 ±4 3#
7]4 SI# 4# 344 S£# 4## #4#3£4 4} 4. a}t}. 344 33# 4
#4- 334 #4# (4 4.2)4- #4-.
v=Kria (4.2)
47]A], !£,#■ 344 £3 #4^44, z„# 344 armature4 33# ^#a]
4-.
S- A^afl A}## 4# 344 £3 4*t# 1.78Kg-cnVA44. 444 4^4
347]4 4# 344 33# 4## #44334 #41 344-4711 444# £3
#f#4= S14-.
-62-
(Servo Pimp. >
<ADC
2# 4.12 "9 #4 422
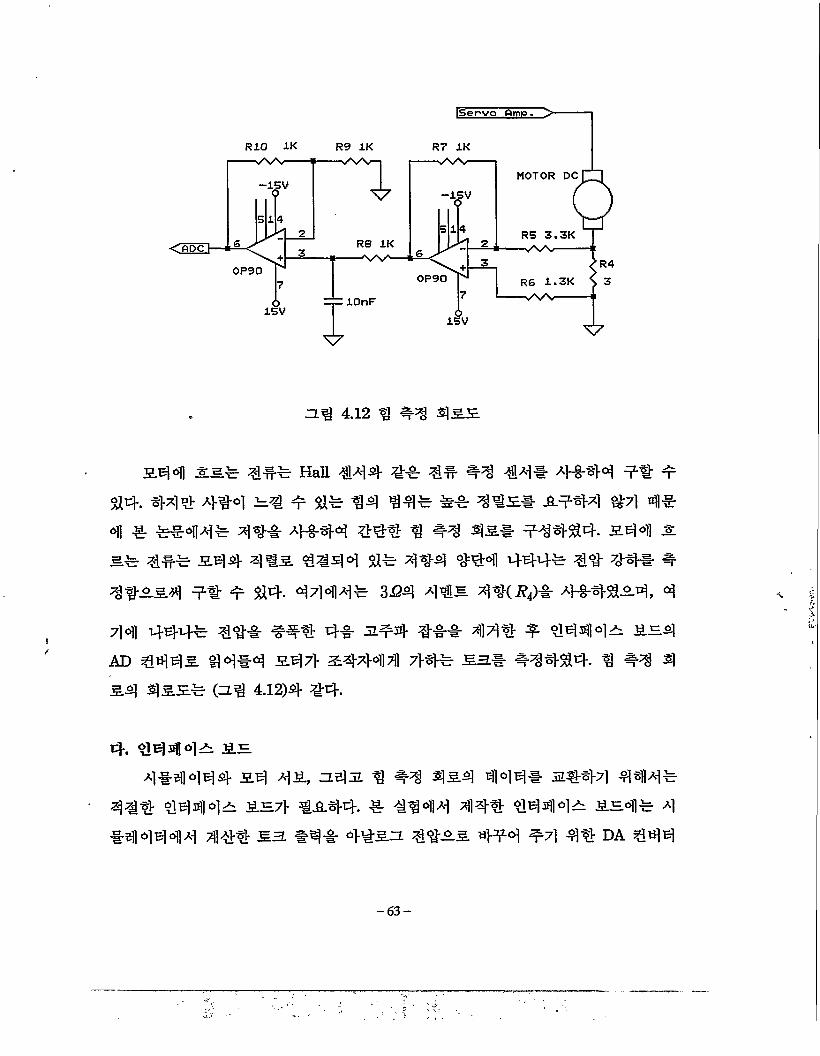
241 ##4 Hall #44 ## ## #4 #4# 4#41 ## #
$14. 44# 4#1 1^4 4" 14 #4 444 4# 412# 2#44 &7l 1#
4 4 44444 444 4#41 4:44 # #4 44# #4414- 241 ^
44 4#4 2.44 414 1444 14 4 #4 44:4 4444 4# 44# #
##25.4 ## # 14. 44444 3134 444 44(^)& /'1#4121, 4
44 4444 41# ### 4# 4^4 1## 44# ^ #4112 424
AD 4444 BM#1 247> 24444 7}#4 22# #4414. 1 #4 4 24 4224 (24 4.12)4 14. 4
4. #4112 224#4144 24 42, 242 H #4 424 414# 2#47l 4444
41# #4112 227} #244. 4 #444 414# #4112 22414 4#41414 4## 22 #4# H22 #4-22 441 ^7] 4# DA #44
— 63 —

4 H S15.S) ^<9-4- Hpp-^ ^7] -91% AD
ZLEia. tetij' ^4- 7]^-S>7l fHrG)4 ^7] 4j# Al#^
b}-<9 2l7& S]5. #4 0^4. da ^b]^ 12bits] 4-^ ^5 4?M M
5-31 Analog Device/M AD 664-BIP# AT-g-*}#_a tj}, AD ^B^
Shits) #4 3.410.2. ^-s}^ Analog DeviceA}S) AD 7821KN* A>-g-
S}$ti}-. DA 5*9- ^44 AD ^tilB)^ ## ^4]^-
-2.5F- +2.5V»14.
— 64 —
*11 5 *! ^ ^ 44
7}# W4 #43. 411 44% 3.11 4^54, #44 5=1 4#
&c# 2.15- 14^4. ziela. pro 44714 *1## 44s i^=8.0, Kd= 0.5,
i£, = 2.655 14$4. 44 44 444 #4# ##7} e 44, 544
4 44 #54# #4# 554 ##7} 44. 444 #4# 44 4 444 #4 #• #*)1 4# #4 #45#4 # 111# 547)1 444 4-544 #4# 44
4445 #4 54# 4444 54 44.
4 44445 4471-45 #44 5=4 4## 57)1 444 5444 #4
#44 1# #44 #43.#4 # 444# 54 # 44. 44 #44 5=4 4
## 4-7)1 444 544# 4# 414 4*1 #4# 1*1 #444 444# 54
# 44- 444 554 4## 4# 57)1 444 5447} #44- 4# #441 4
4 44*1 144# 4#7> 44. 4 4444 14 44*1:144# *1## 54
7}7> #4# 4# 44 451 547I7} 54447)1 414# 4 111*1 144
4 14 4#44.
4#4 4 im#*l 4 4*1# #5 #44 #1#4 1*1 4#4 414 4*1
7} 154 4#*11 1*1 5#44. *144 41*114 11 #4*1 1444# 4#
41 #4 4#*14#4 4#*11 444# 5444711 44# # #5 14. 5s)5
5 11 #4# 41# #44# til # 4*117} 4E.5 # 44*11 144# 11 1
4# 144# 4*1 #5# #4*14. 444 #44 41 &## 4414 11#
#44 5444 #444 #44 11# 4 4## 4544# 14*114 5447}
#44 4#414# 4# 14 *141 # 15# 14 444. 11 5=1 4#
* 4 57II, 5# 4 4711 11 3 #*11# 54 4-5} pro *1#» 44 4155#
11 14# /Ml # 1# 444.
-65-
#444# 4-444 #4# 4# 45.5. 4 #4 531 4 ;g#4 444# % 457} 445 54444 444# 4# #4484. 7}4 #4# 2445a. 5#
4 #$555 4 ##4 %4 #44 4W #4## 70Hz5 4444- 5^3l
54# ##44 44# 4#4# #44 444 &44 deadzone 444 444
# 4#4 44# 544 #44 #4. 444# 44= ±0.5674 #<% 5## #
4-4 54# 44 4444 44# # $5# #44. (5^ 5.1)# #44 4#4
44 4^44 5## 4444.
1
zl4 5.1 44 #4 45^4 #4
— 66 —
i. i)
7>. #mi #44 (1)
#7}4 444 *44 *7>4 444 #4 #44 ^ 4-45. M4
4*4* 4^4 4#4. (s^ 5.3)# #7>44 #4 4# #7}4 444 4s
€4# 44# 4°14. 47]4 444 #7>4 444 4s.# 444s 02*
#44 *7>4 444 4s# 4444. *7>4 444 4s# ### 7]#ss. 4
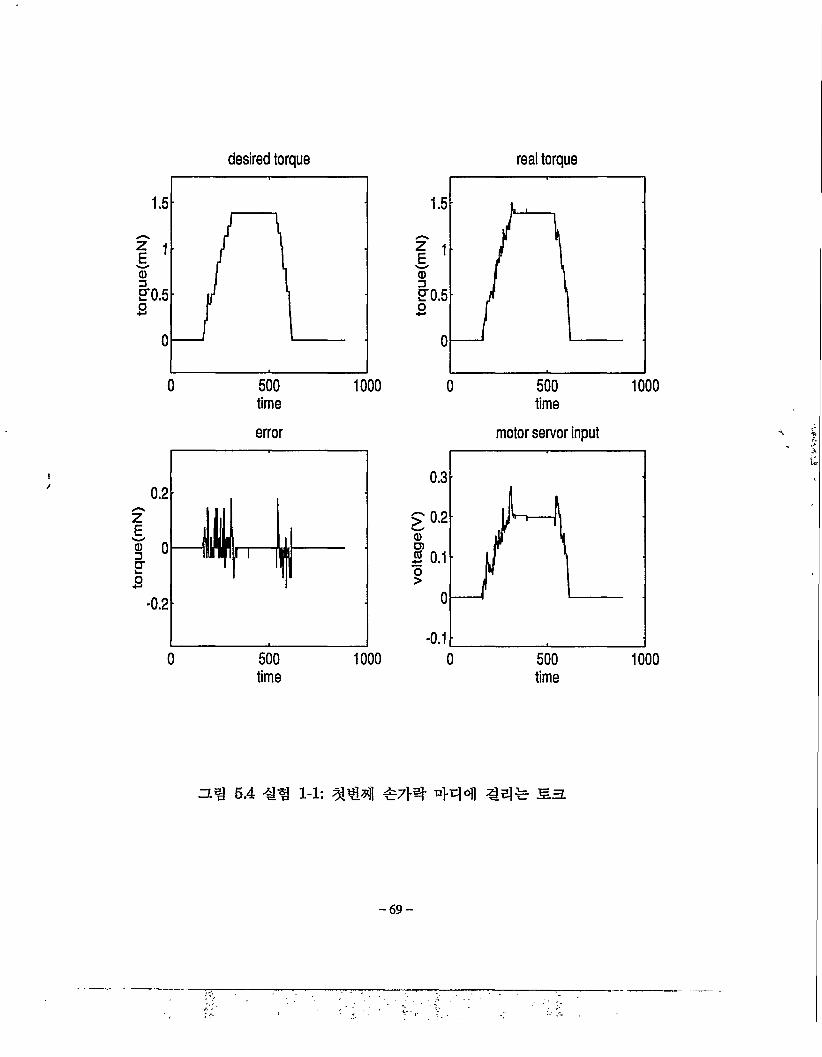
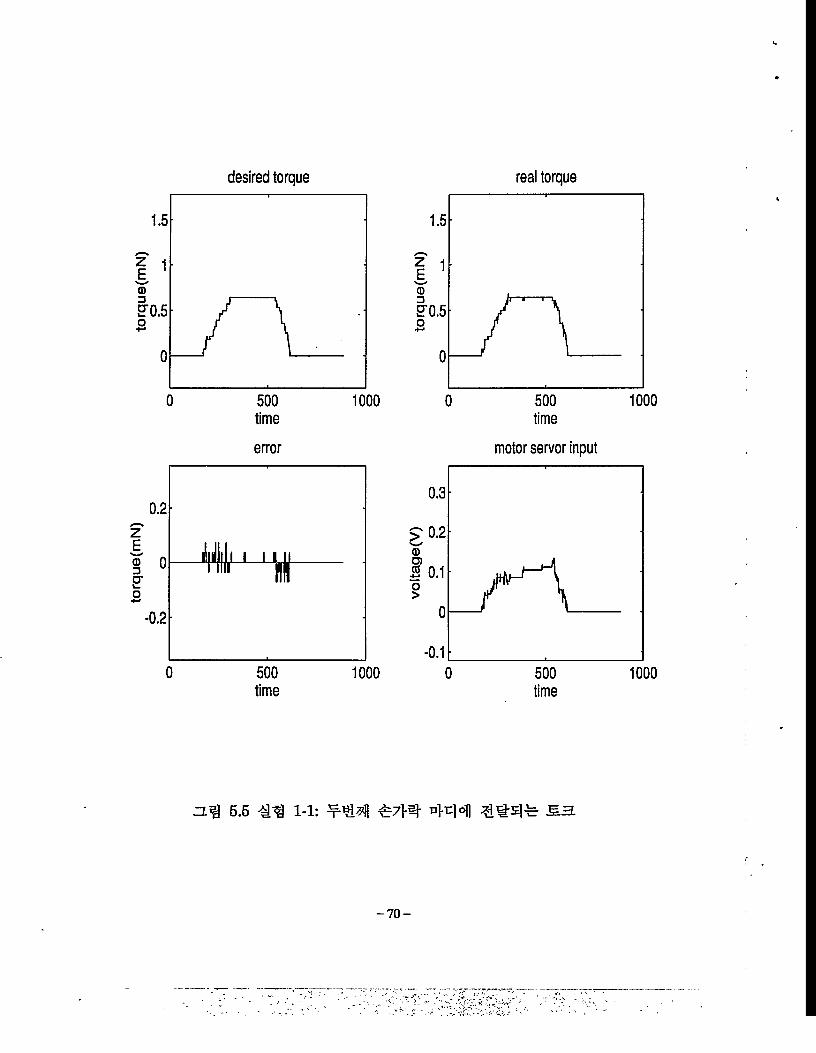
4 #71-44- 4*4* 444- 4SS. 44#4. (s^ 5.4)4 (s^ 5.5)44 4#
4*4 s^* 2:444 #7>4°1 7>4 #44 #44 4 #4#* 4 444444
4 44-4 SH.44, *4 444 #4 24444 4#4# 13# #4#
444. 4# 4*4 s^* 4444444 444 ss# 441 2:4444 44
4# sa4 44* 44-44. 4#4 #4 ss4 44* pm 4444 4 4 S3.
4s, PID 4444 444 DA 4444 4^4 44 44* *# 4*4 s^4
44-4 $14. 4 4* s4 45.3 4444, s4 4&414* 4 44 4 5.64 4
#444 s4* #4*4. '
-67-
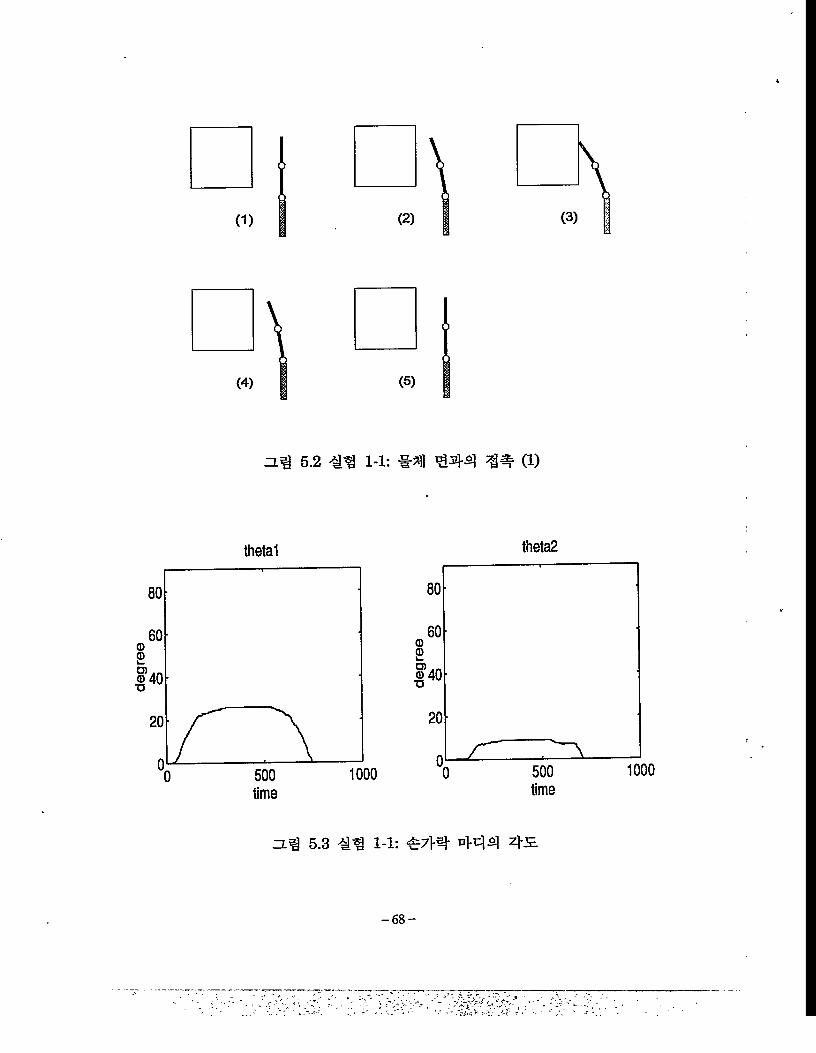
ZL^ 5.2 1-1: (1)
thetal theta2
n.% 5.3 ^ 1-1: ^7}#
— 68 -
torq
ue(m
N)
torq
ue(m
N)
desired torque real torque
0.2
0
-0.2
0 500 1000time
motor servor input
zlb) 5.4 igg 1-1: 4^ S3
-69-
torq
ue(m
N)
torq
ue(m
N)
desired torque real torque
error motor servor input
n.% 5.5 l-l: ^4 ^7>q- 13
-70-

•/
w3n)
ifS3"40o] m Wii
IifftTp) nimlW
rj»
(M T&
w ft sr «US #w 2am °'f
#W
5
Tir'S’
#sr
?nT6
"STHollijo
min)op
^niftr-4
1
Hlrif
Sw-1TwftNsrw
?
ft%
Jp'o’
ftS3<hfto]ill
Wo|mS3^io•tMrWftWDimgUKo]m7K#mlTS-
m
a4pJl
*kr K-l'iu'S’
7F6m
srTpjmmjr<1-o[mIftwofr
JIJm}-
iW
K1ftSTJNST?D|m
SrIf*TDimftI
g&KI
o|m6msrnP
Il}o
mlmsKwIK-lOp
TfHPWF)o
min)rrid
nPK
IK-l
$
OpIF6mft
srwrjS
S3SrTf
op ml %r ■ o| 6m w ft <1-sr <[$ Ii i! ig D|m
IIJp rlr
mlm$
nPopft6mft
srwnftftS3SrifolW><hft&
Kn\KSID)ft ft
ftft
| : . :hx\. 4 , ,I
I
to
u
cn
tubdSt%
t
£HJa#
degree
O
degree
thetal theta2
torq
ue(m
N)
torq
ue(m
N)
desired torque real torque
error motor servor input
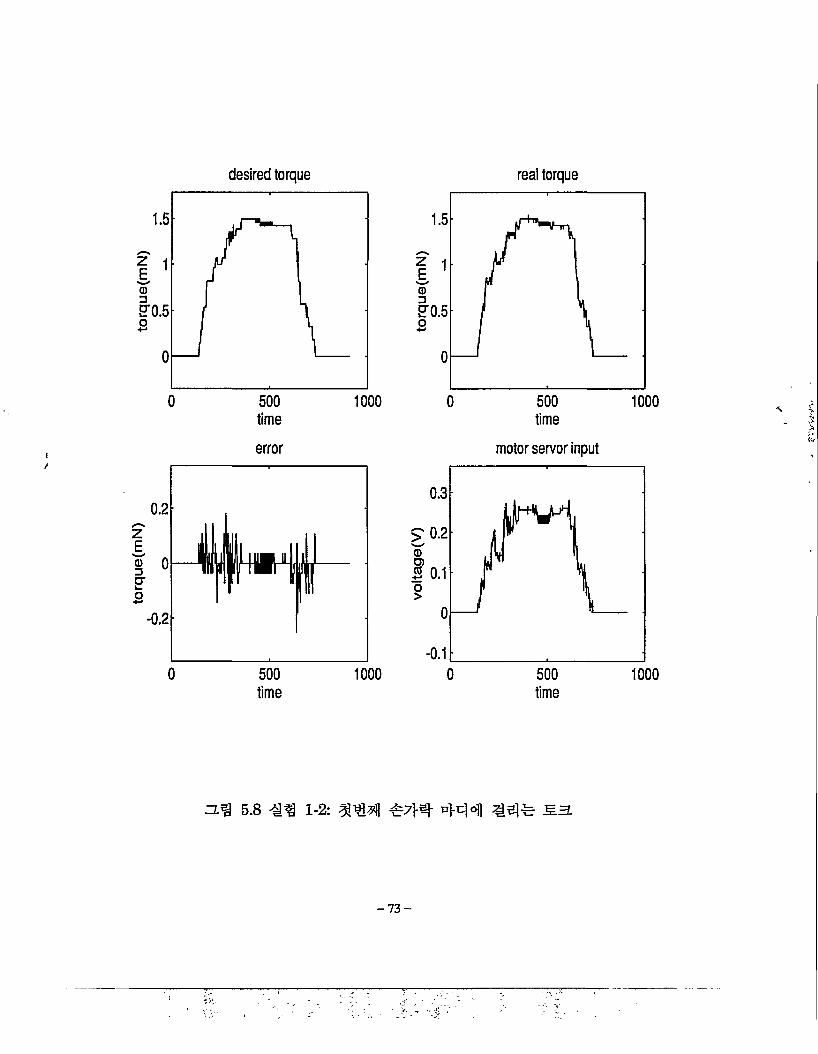
nig 5.8 1-2: v}t]d\} 45^
-73-
torq
ue(m
N)
torq
ue(m
N)
desired torque real torque
error motor server input
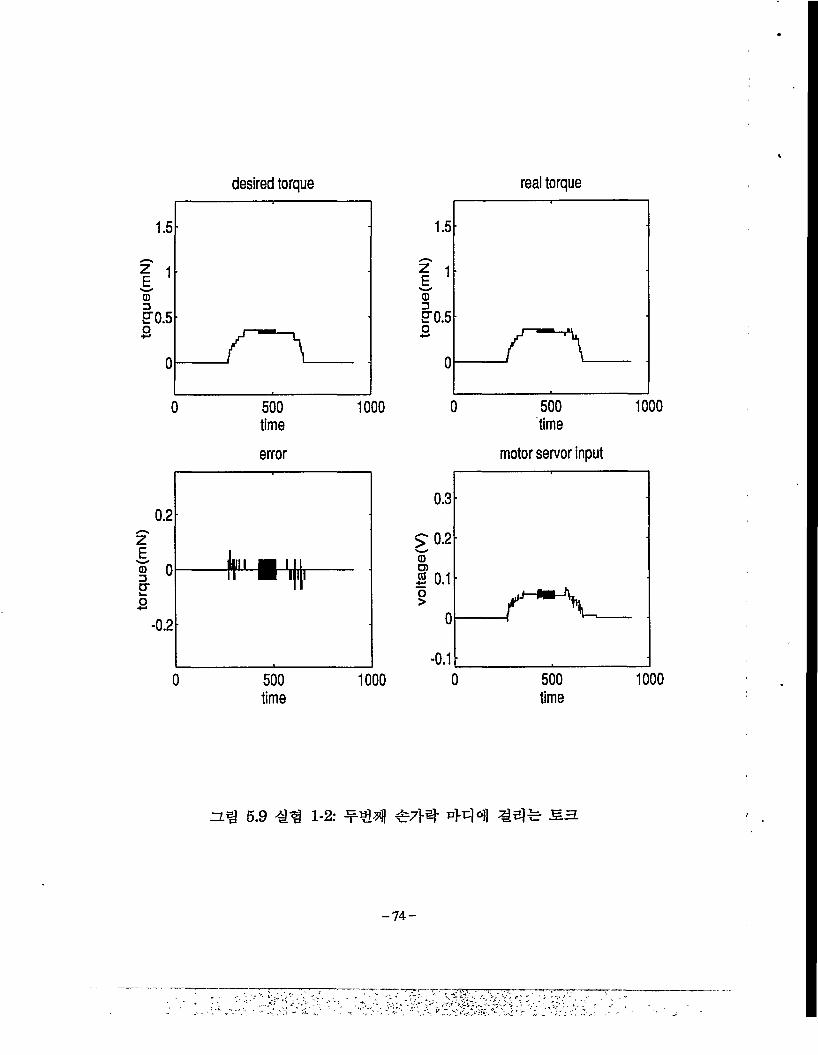
5.9 1-2: ^4 ^7}# SH
-74-
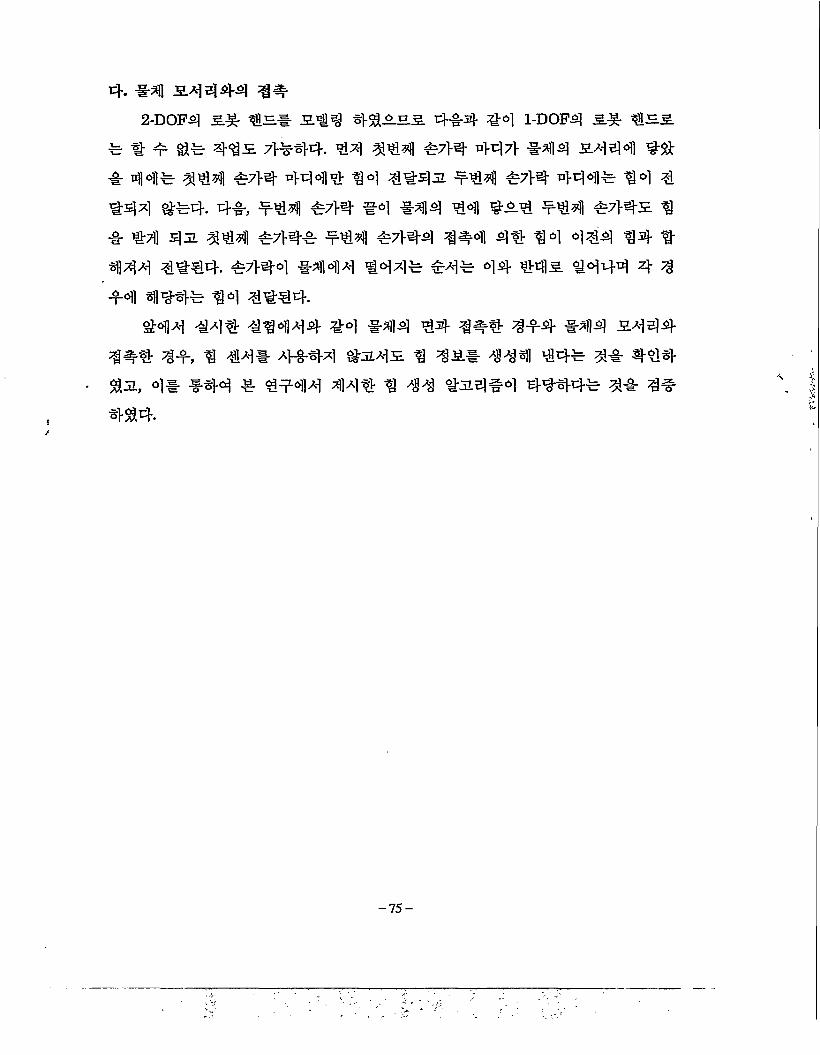
4. #4 5.444-4 4#
2-D0F4 5.^- #5.# 5.# 4 4#4 #4 1-D0F4 5.^ fEE
^ # ## 7>^^M. #4 ^#41 ^7>q- 447} #44 5.444 ##
& 44# %#4 #7>4- 444# 44 ##45. ##4 #7}# #44# 44 #
#44 #^4-. 4#, ##4 #7}# #-4 #44 #4 #5# ##4 e7}#s H
# #4 43- #7}4-& ##4 #7}#4 3#4 4# 44 444 14- #
#44 ###4-. #7}4-<>l #444 #44# #4# 44 #43. #44-4 4* 4
4-4 4 #4# 44 ###4.
#44 #4# ##444- #4 #44 44- ### 44-4- #44 5.444-
### #-f, "9 44# 44-4-4 ^4e # #3# 444 #4# 4# #44
#31, 4# #44 # ##44 414"Hr 4 44 #32-4#4 4-#44-# 4# 4#
4#4-.
-75-
degr
ee
nH 5.10 ^ 1-3: #*)1 5-^e]^ ^
thetal theta2
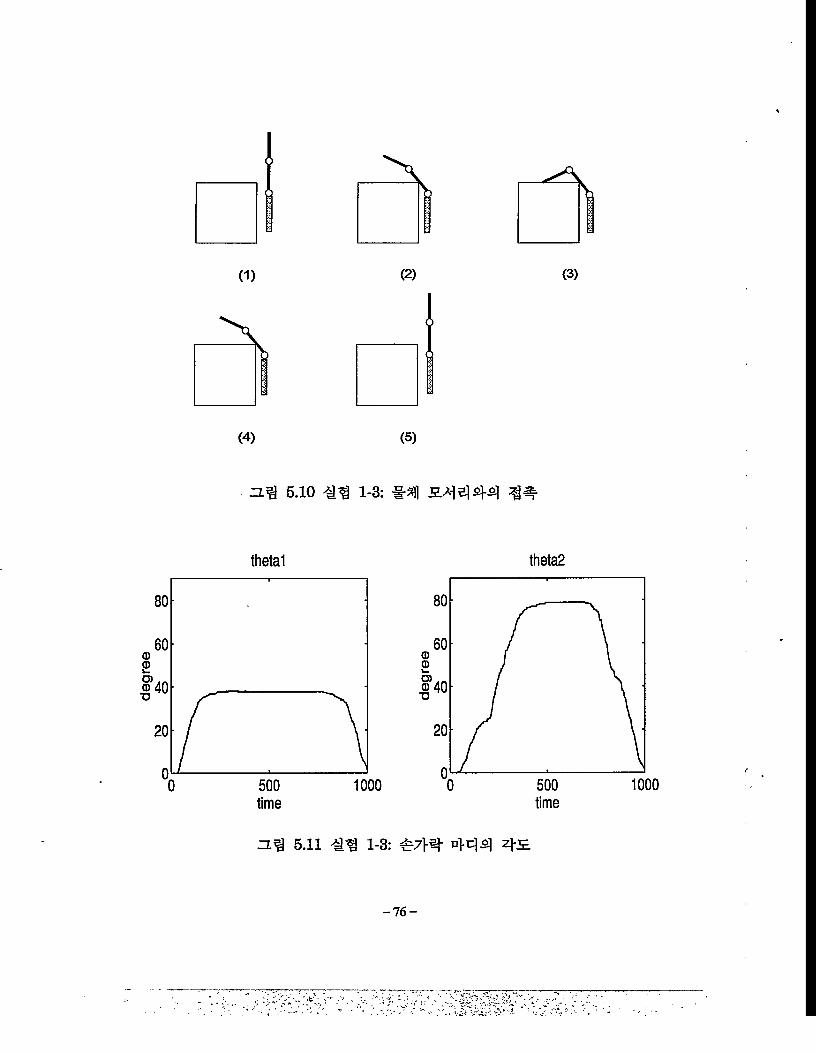
n.% 5.11 ^ 1-3: £7}iq- n>r]o]
— 76 —
torq
ue(m
N)
torq
ue(m
N)
desired torque real torque
error motor server input
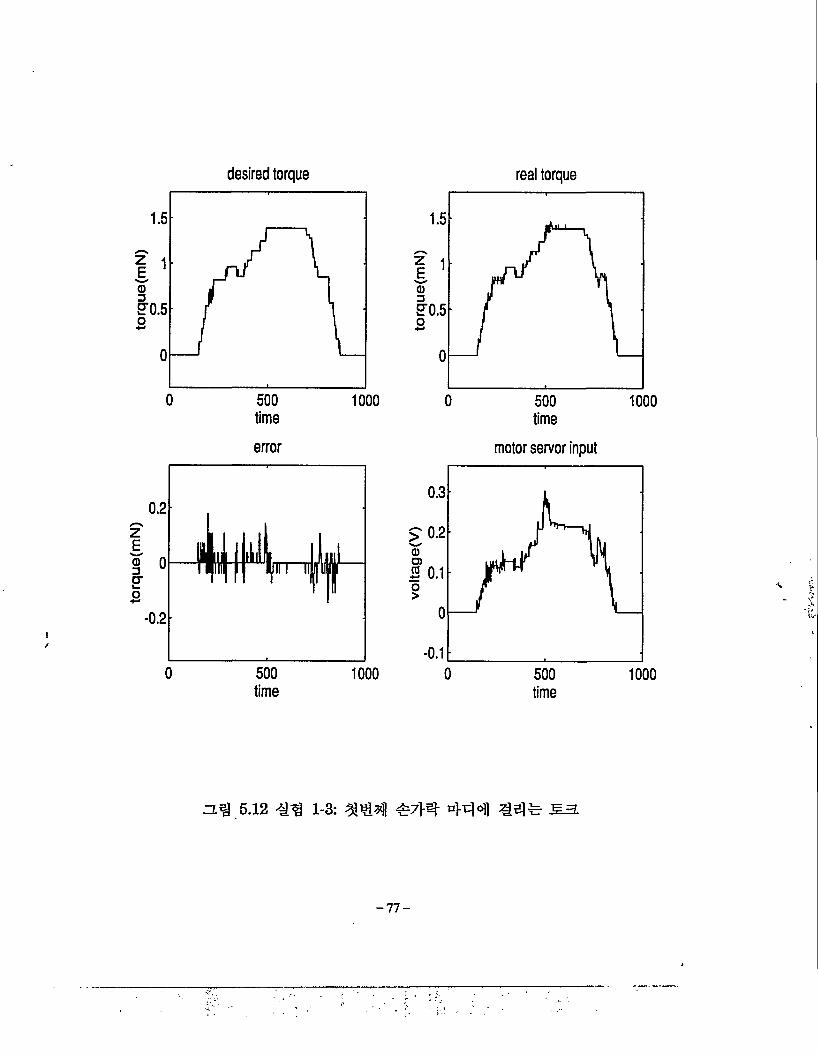
5.12 ^ 1-3: ^7}^- v\t\6\] £H.
-77-
torq
ue(m
N)
torq
ue(m
N)
desired torque real torque
error motor server input
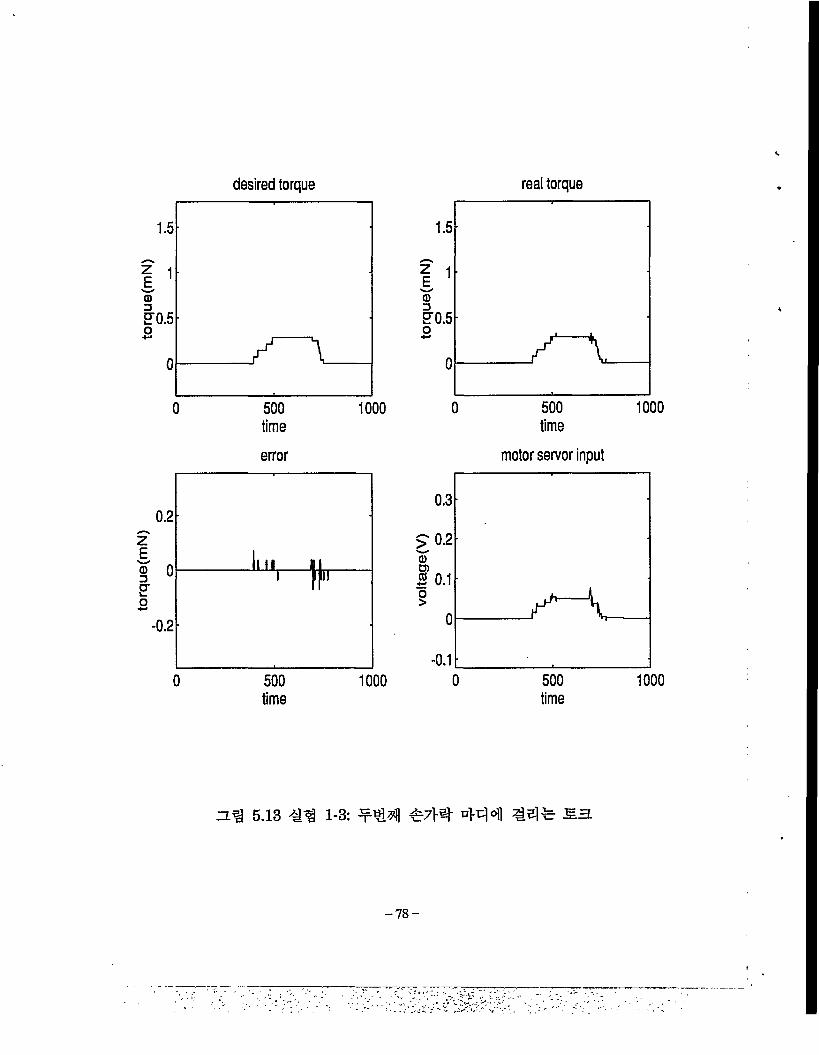
5.13 ^ 1-3: ^4 £7}^- 43 £3
-78-
2. #1 2) ## #4 11
4##1 2447} #1 ### 244 44# #4 #4# 4 244#
14 4^1 ##4 2## 4#44 #441 111 4#4. 44 244-44 44
4 444 14 441 14# #2, 14 14 441 4144 44 #44 4#
441 4 #141 ##41 ##42# 444. 242 2444 #4 #41 1
#1 #442 2 ##4 4441 41# 141 42# 444. 1 11441
41444 !#! 2444 17>4* 2.114 21# 242 ##4 2^1 24
4 #14- 444 2441 44 121 41471 #42 1 #!#4 #44 1
444 12 #1 4144 ##4 244 44# #4#2# 484.
A operator B operator
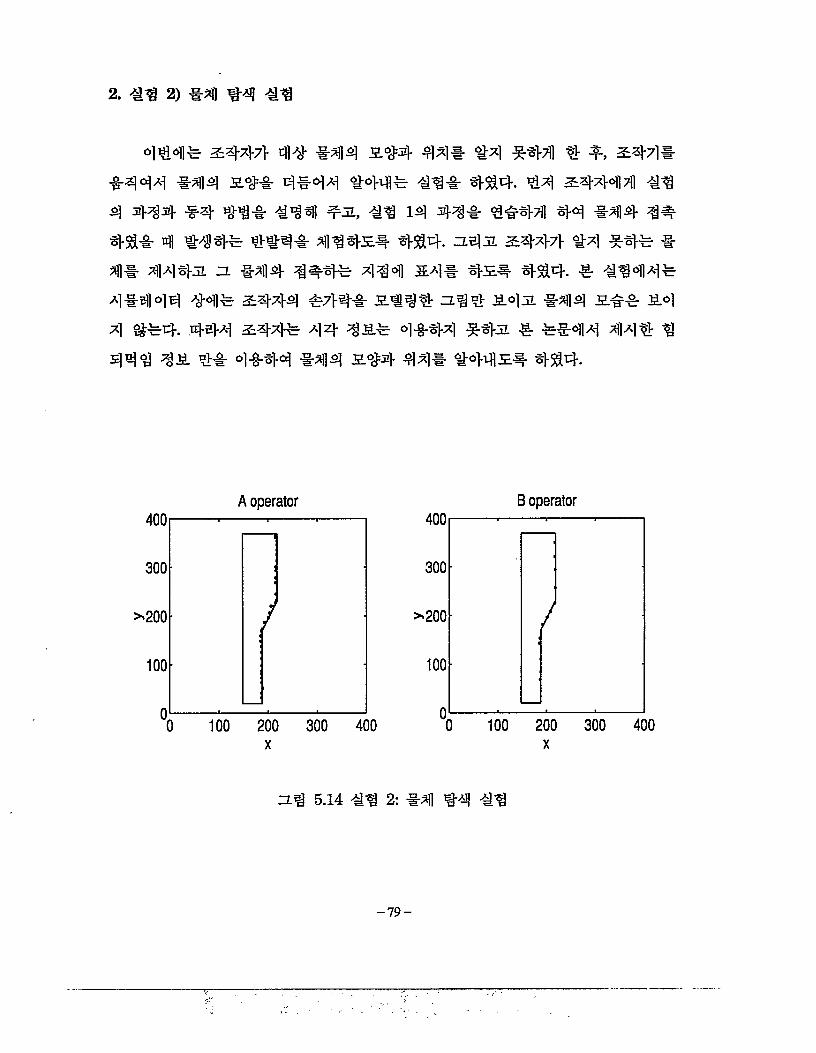
2# 5.14 #1 2: ## #4 #1
-79-
#"H# 4# # 24444 44-xr 5.14)4 #°1 44#4. (ZL^ 5.14Ha] 'Mas 444 4# #^44 444 #4^4 #43.^- 4
44 4444 - zlb]a 4as. 444 4# ^444 #44 4##
4444zl 3E4# 444.
o] m 44# #44 #3# #44 # 3447} a# #44 s.4# 44
s #44a## # ^ 44. 444 # fe#44 44# 4 43 4# #ae]#4 4^4 s#7]7> 4444^ 4# # "r 44.
-80-
U.-; TT*
41 6 ^ ^ w 411
*8144 3** te3 4* 43* ^§442 2*435. *1#1 884
4 43* 43411 *2# 4#* *4. €4 3414 384* e
*4* 44# * 8* 4*4- 44 4 #4 4# 4 3# 4 8^3 *81# 144*
#3*3 4 8*14* 7># 4^# 4444 * 414* 44 #3* 414484.
€4 2:444 7>4 44* 4444 # 414* 4* 4#4 4444 44* 44
3i 84. 4 43# 4*44 #335.4 4 44* 4*41 #3 7>* #4* 4
444 43 # 44* 44# 4 8* 4444£ # 42* 4* 4 84. ##
444 4 44* #23 4* 43414 #4 43* *^@41 444 434* 4
4 #3* *44 434 44* 44 1*1 * * 828, *4 *414 484 2*4* 4*4* 44 8** *1 43 4#* **# *£ 84. *4 #4 2
444 2:444 4844 444 3 4*4* 4a* 4*4* 4 44* 44 4
8-6.3. 344 3:448 48* **# *4 8*4, 44 #4* 8*4# 44
4 841 4# **114 8 #4 44 8*4.
* 3*44* * 48* #41 884 * 44* 4*44 &2 7>4 448
4 #1# 31448 3 4 a* 3* #34#* ;H#484. 242 # 43*
&47MII 4## * 8* 2:44* 81448 €##234 #24*4 444*
4 *48^-8, 444 3^- tel 4*# * 8* 134 3444 *3# 8144
84.8334 4813* 4*4 4* 4#8 84.
441, * 8*14* # 8184 44* 3444 *7>4 441 4*484.
444 8* *81 438 4*# * 83* 31 8*4 *71-4*3 44488 #
484. 8* 7>4 #43 34*334 44* 4444, 441 44 1*48 4
8433 !#4 433 2.4488 *4. 134 244# #1# 1 444* 2
-81-
448222 ^ #t)1# ^444 ### #2# 42# 44# 4= 8#
444#4, #4 4*9444 4*94- 44 444^ *442 2447} 3£444°>
#4. 2422 #44 4^44 2:444 44# 8*8# 4## #442 24-7] # i#44 €4 2:44- 4# 44 4^D4 #44^ 44 #244. 242 o]
4 #4# #4 #44* 2:447]- #44 4## 4 4444=- # 424 4444
444 44# # 424 24# #44 #42. 24444 #444.
44, # 4444 7P3- #2# #4 #4 447} #44 4448# 4 24
47} #### #4# 4#4^ 444. # 4444 4## ^4 4# 44# 4
## #4#4#, ##4 4## 4# ^4 44# #44 4 #48# 4 2#7}4
4 4#4^= #4 444 2:44-7} #444 4# ### ####- 4 44#4 4
4 * 44. 444 # 4444 4# #4* #4^ #44 2:4444 # 42# 4 ### * 8^=- #24## ?]]### 42 # 444-2 #444.
7}# #4# #4 24 ##4 444- 7}# 4444 ##, 44, 2# # #
## * ## #°}7} 4# #4 25)25. 7}4 #4# 4#44 247}44 ##
4# #44# 44 4# ##7} ^4 #24-42 4!444.
-82-
W A
[1] T. B. Sheridan, “Telerobotics”, Automatics, vol.25, No.4, 1989
[2] J. Vertut and P. Coiffet, “Teleoperations and Robotics”, Robot
Technology, vol.3, Kogan Page Ltd., 1985
[3] J. E. Colgate, “Power and Impedance Scaling in Bilateral
Manipulation”, in Proc. IEEE Int. Conf. Robotics and Automation,
1991
[4] K. Tanie, K. Komoriya, M. Kaneko, T. Qno and T. Fukuda, “Bilateral
Remote Control with Dynamic Reflection”, in Proc. of the 6th
CISM-IFToMM Symposium on Theory and Practice of Robots and
Manipulators(Romansy 6), 1987
[5] T. Kotoju, K. Komoriya and K. Tanie, “A Robot Simulator with Force
Generation Function: Configuration Space Approach”, in Proc. of the
2th Int. Symposium on Measurement and Control in Robotics(ISMCR
'92), 1992
[6] H. Iwata, “Artificial Reality with Force-feedback: Development of
Desktop Virtual Space with Compact Master Manipulator”, Computer
Graphics, vol.24, No.4, Aug., 1990
[7] T. Kotoku, K. Komoriya and K. Tanie, “A Force Display System for
Virtual Environments and its Evaluation”, in Proc. of IEEE Int.
Workshop on Robot and Human Communication RoMan '92, 1992
[8] D. A. Lawrence, "Stability and Transparency in Bilateral
Teleoperation”, in Trans, of IEEE on Robotics and Automation, vol. 9,
no. 5, Oct., 1993
— 83 —

[9] P. Fraisse, F. Pierrot and P. Dauchez, “Virtual Environment for Robot
Force Control”, in Proc. IEEE Int. Conf. Robotics and Automation,
1993
[10] M. Uebel, M. All and I. Minis, “The Effect of Bandwidth on
Telerobot System Performance”, in Trans, of IEEE on Systems, Man,
and Cybernetics, vol. 24, no. 2, Feb., 1994
[11] T. Takahashi and H. Ogata, “Robotic Assembly Operation Based on
Task-Level Teaching in Virtual Reality”, in Proc. of IEEE Int. Conf.
on Robotics and Automation, May, 1992
[12] T. Kotoku, “A Predictive Display with Force Feedback and its
Application to Remote Manipulation System with Transmission Time
Delay”, in Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and
Systems, July, 1992
[13] B. Hannaford, "A Design Framework for Teleoperators with
Kinesthetic Feedback”, in Trans, of IEEE on Robotics and
Automation, vol. 5, no. 4, Aug., 1989
[14] J. E. Colgate, “Robust Impedance Shaping via Bilateral
Manipulation”, in Proc. of the 1991 American Control Conference
[15] R. J. Anderson and M. W. Spong, “Bilateral Control of Teleoperators
with Time Delay”, in Trans, of IEEE on Automatic Control, vol. 34,
no. 5, May, 1989
[16] H. Kazerooni and M. G. Her, “A Virtual Exercise Machine”, in Proc.
of IEEE Int. Conf. on Robotics and Automation, vol. 1, 1993
[17] P. Fiorini, B. Hannaford, B. Jau, E. Kan and A. Bejczy, “Hand
Trigger System for Bilateral Gripping Control in Teleoperation”, in
— 84 —
Proc. of IEEE Int. Conf. on Robotics and Automation, vol. 1, Apr.,
1987
[18] K. Kosuge, Y. Fujisawa and T. Fukuda, “Mechanical System Control
with Man-Machine-Environment Interactions”, in Proc. of IEEE Int.
Conf. on Robotics and Automation, 1993
[19] K. A. Parry and I. D. Walker, “Myoelectric Teleoperation of a
Complex Robotic Hand”, in Proc. of IEEE Int. Conf. on Robotics and
Automation, vol. 3, 1993
[20] T. Yoshikawa, “Foundations of Robotics: Analysis and Control”, MTT
Press
[21] g- 3Jr, "sM 3.3-i- ^1-0-4 S* ?4”,
44 44 44 44 1993
[22] 3 44, “7>4 44”, -S4 4444, 1994
[23] Aj #4, VR4 44 4^, 1994
-85-
n\ 3 # §ME 0|## rnE a|^hi
4] 1 € w
%% 4%#44 4#! 33M 44% 44# 3:4-453. #^%7] 444# #44 %^4 444 ##40.3. 44% 4" $144 %4. #4 #44 4% %3# 4#%7l 444# 44% f^l 447} ol-g-42. 44- 4#4 %44 4% 44 4## 4# 3^:# 4444 =5.n^*g^ %# 44 5.44 444 5.4 4444 %44 444 44% # $14.
44 44 #4# 4# 5.4 4^84 4% %## 44 5.44 7H%44 7}% #4 71-444 442. 4# ##44- 44 45.4 4# 445.444 45.4 444 444^.5 #4 44 45.# %# 4" $14. ## 4%(image)4 %# 45.7} 3E%44 $14% %% 444°} % 4444 44 4444 444. 444 44 45.# 4 #%# 3.# 4^H4 #%# 4*fl4# 444 %4% 444 %£7} ^414 444 44.
44 45.# 44% 3^- 4444 %4 $14# #44 $14(object recognition)4 444 44(location decision)4 # ##53. 4#444- #4, #4# $144# ##44# %4 444 44% 44 #4$l7># 44%4. 4# #% ‘44 «#$l7}? 4%7}?'# $14%4. 44% $144 4*34 # 5.# 444 444$1 44# 444 % A% 45.# 44 4544. 4# #44 44 $14 %44-3z. %4.
# %#44# eye-in-hand 3.#44 #44 3%% 44 $14 7}#4| 7}% #4 %7l4 44# 5£.(factor) $1 44(depth) 434 444 444 7]#%314 %4. 44 4 #4# %# #£44 4-#% 444 444 4#44 %#4 # %#44# 44# 444 3# 4 #4 #4 71-44-7} % #4 #44 3#444 714 #%# 4#jl4- %%. 4 3#4 44 #%4 4-4-4 #44% % 7144 447} 444#4 % 49-44# #4 44 % 44# PUMA^M-4 base frame 44 #4 3^-4 7]#4 % 4 %4 #%# 44% %# % # $1# 44$1 2m44 3D contouring 4% 44 4 %#4 34% #4 #44 444-7} 7}%4 7}4 4# 43 I0cm%44 t14# #4%4.
-87-

# 4** 3.711 3;M #*33 4*44 $14. % #4| ##* 1*#341 7l]W*4# 4** 7144 *4 344* calibration^ tfiSflAi ^##3. * 4###4 44 4Si #34#4- #4435. 44# 4= 5U* 44 44 *3^114 4^4] 4M4 4*4-34 #4. 44444 447} #4 #44 4** 4# 44 #44 $14 4 *34-4 44433 4#4 44 437} #34-4 #4. 344 e44 *#cm44 4144 44 #4# 444 44*4 4*4*4 #4-
3* 3^-4 7}*# W# 44 44# $14# *44°} #4 44# 3S- 444 *44 4* 714 44# 44-4 e 714.44* ## 34714* #3 configuration# 4**4 4*44*4 4# #4# 4**4 714# #4*3 #71444* 4 3471 44 #3# 4**4 #4# $14*3 444 714 43# 3*4- 44* 4**4714# #4*37} *#. 4# 4#4 *44-33 #4# 3*4-4 #4# #* 2&4 714 #44 4*4 4#*3 #41 #4# 4*4 41* 4*4 3*4 #44 #44 4*4 71**37} #4.
— 88 —

4 2# ### 4^-# 4^1 ##
1. #4# 4## 444 #4 4##-4## 6\tf -%--%- ^-oj^A] 4# 3)il5#4 44 ^5# ###}A
X} §}# 4°M A44&&441] #4, 4# S# #oH4 4# #5# 4## 44
4^# M^} # #5# #4] 4 4% 4#AS#4 44 #5# #### #11# 4#
4 AS 2;M W^S] #4# 4### stereopsis7]^ 4 7}# ^m^S. 4#4#4
## n}e}x] 24)4 7}4]4# ol-g-'sffe A414A fM eKstereo camera)i4
#44 7H14# 4-§-4 4 7}#*| #3) •§}# 2.44 Xi44 ^.(motion stereo)# o]-§-:§}#
#4# 4##A $14.[2][3]
A414A 7M4-4 4# ¥ 44 7M4# 5#4 ##44: ## 4 4% 4#
4 AS 4# 5#4 e ### #4 44 f}44-#4 44A dh44A 5:4-7} #^#4
4-4-W: t &# 4# #5#4 4^4-. a# A4eflA4 %-$- 144 7M14-# 4##
T=- &44 f# #444 ^42 f}4# 4 #4 #41# &x]>£ #7l] 2#4 4# 4#
4- £4 44jxi S## 4 #444: 44# ^x^o] #4 #4 ^4. 2# # ^4 4
#4 4 4 4 311)44 -g-xl] *] 4# #71](correspondence)# 4 ##44 47] 4] #4] S #4 XJa]# a] 4 A] 5:^1 AS 4#4"7]# 4 A# #7]] 3)0] 0^4.
# 44 444- 44^4 4^ A44A 4^4 #41## 4#4-a 44 44r #4
t=- 4# 4# As 4 44 444- 44-44 441- ##4-# 444 4144 44. #5#s(Pentland)[4]# x>4d)] # A## 44 4 a# 4 44444 444 44-7} 44
44 ##4 #4# 4444 44# 444# 44# 444S4. el 4#5. #4# 4
#4 44 444 444# #44 44W 44 4 A# #§] ^4 4# 4-4-44# #
44-4 4# 4#7> #^4S4.[5][6][7] 4#4 4## 44# 4-4-44 ### #44
#44# 44s. ### # $1# A## #44#4 #4# #5 ^4. 4-4-4 #44
### 444 27} 4## 4#444- 45 44(curve fitting)tiJ"4# 4##4[E.
KROTKOV].
zl44- 45 444 4#4# A^ 45# 4#s}4 4# 7}#4# t#4 ###
-89-
#44 zz.5t} #3#7l 43-41 44 444 ## 445 2443 444 #3
#4 44- #3 54-E 5#47ll 44-. 44-4 54 4:4:4-44 54-7} 44- #44 3
4## -9-4-44-.fe3 7}#- 713## #4 #5# 3 4-4-44-. 44 #34# 4414-4 4# 5
Wpinhole model)### 7}44# 44 #414-9-5. 4#4# #53 44# 9-4
(aperture)# 7>4jh 44. 44-4 #414 4 #4 4# 4#4*4 ##(pinhole) 5#5 #
4# t S3- 44 7>4 ##4 44#4. #4 4 (blurring)# #5:4 9"4(aperture) 41
3-4 #44# ##■ #4 454# 444.
#5.-1- #4# 4#4 4444 4# 4## S944# #5# #444 444 4
44 #5:4- ##- 4#4 447> #5:4 &44471- #4# #4# #444 #4. 7}3
## g}3 #5.(gaussian thin lens)5## 4#4# #5.4 , f, #5.4 ##"
4 #44 44 a, #54 #444 44 b4 #4#55. 444 # 14 #4 7l##4.
i+i=/ ***
#4#55 #54 ## 4 #4 44 a4 , f# #44#! #444. E44-
4, #54Mi b 4# #4# #41# 4# 4 #41 #44-711 #4 #4441 #5 zz. 49.
41 44# #41# 5457} 44 #44 #44(blur)#- #544 4# 4## 4#4
i!47ll #4.ZZ.%| 2.1.13- #414 444 4##(image plane)#44 4#4 ### 44
#4. 4 5^4144 #4 4##4 #414 447} l ## #44# 434# 4 4
#4 4#### # 7H4 #55 ^#711 44# zz.## #3 43## #4 <r # #4
4#-(disk)55 7}#jl 4444 44# #4# #4 4 (blaring) 4 4-2. #4- #4# 4
44 #717} 444 #44# 444 #4 3344 4141 ### 3 #4. #4 #4
#44 #4144 714# 43 #55 3444.
-90-
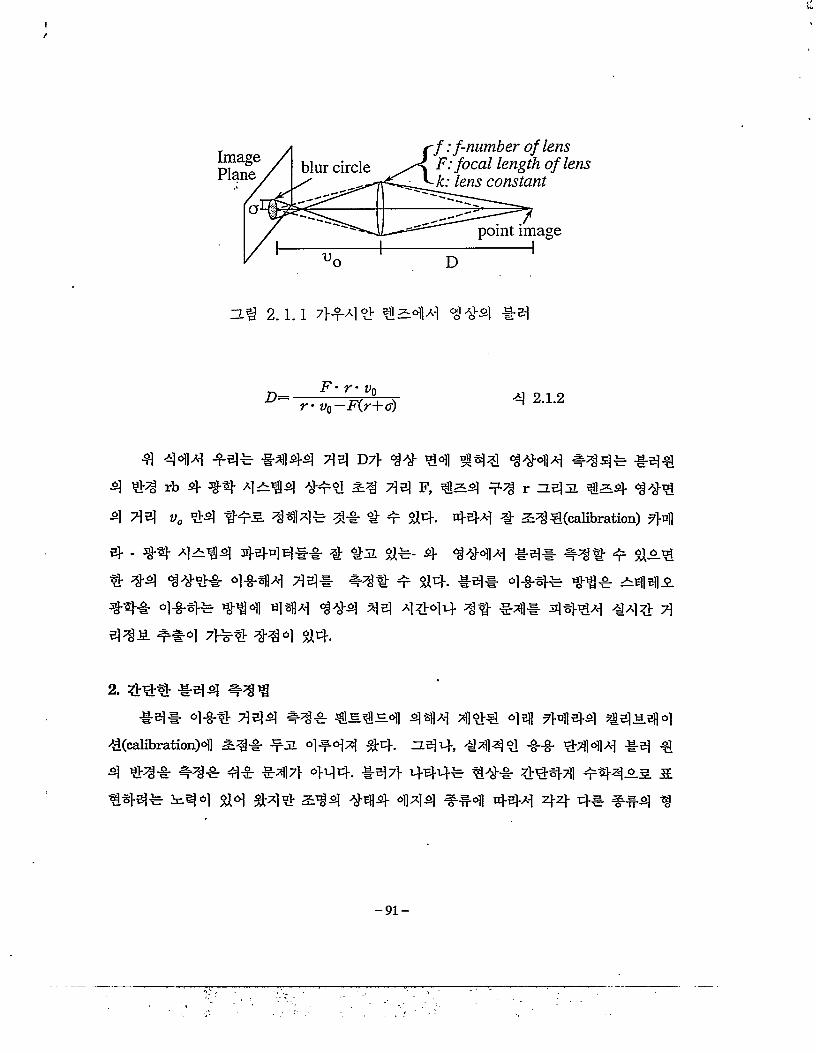
/ :f-number of lens F: focal length of lens k: lens constant
point image
2.1.1 7}#A] o> 44 #e]
D F' y v0 r- Vq—FXt+g) 4 2.1.2
41 444 #49 HI 44 Tie] D7> <84 44 <84°114 #449 #4#
4] #8 rb 4 44 4^4 49$] 4e] F, te4 9-4 r :n.e]a. fe4 <84^
4 Me] v0 44 495. 4*1149 44- 4 9 $14. 444 4 ^^(calibration)
4 - 44 4^4 44441-4- 4 4a. 49- 4 *84414 #4# 444 9 $1^4
4 44 4444- 4-HI4 44# 444 9 44. #4# 44-49 449
444 44-49 444 4«H4 <844 44 4444 44 94# 4444 444 4
445. ##4 t>94 444 44
2. 444 #44 #44
#4# 4-8-4 444 #49 4«D4 444 4 ell 44144 €45-44^.(calibration)*11 &4# #a 4#44 5:4. n44, 4444 -8-8- 4444 #4 #
4 44# #49 49 #44 #44. #44 444-9 44# 44441 9445-5. 5.
4449 5# 4 $14 5:44 444 444 ##4 444 44 4# ##4 %
-91-
BflS. 244# ^4# 4444-#242# ^ofl tflSflZ-] -i-51^4- 27}# 7}*4# 4t|*] 4 % 4*
(point spread function)A5. #/}444 S.'S ^ s}2, # 4#(image plane)*!] 5§^X|-c-
#4* -#e]]4 #4(orignal image)4 *#; 4* o# 7}X|^ 4 44 4*(point spread
function)# ##*422 ^H44#4. 7}*4# 4 % 4*4 *#4* o*
## -#(blur circle)4 #44] #B]]44 44# 7}*]2 #4. 444 7}*4# 4**]
#4 4*# 4# #3] 44 7]5]# ?1]4 4 * #7l] €4- #% 422
4442# 44-4 44
I(x,y)real= f J G(r, o) ° I(x,y)rawdxdy 4 2.2.1
-(x-ll)2Kx) = A*e * 4 2.2.2
4444 I(x,y)rear& #4 ##(image plane)*]] #44 4# 4442-, G(r,d)#
#44*(spatial constant) o# 7}7]^- 7}*4 4 4 444#(gaussian point spread
function)# 4444. I(x,y)raw #47]- #444 ## €4 #4# 4444.
444 4444 #44 44# #44 447> #444 #44# #44 5-44 ##*114 4#444 H"7]4 #47]- 34] 444# #4 #414 47] 47] 4#44. 4 4# 2 H-44 #4 #44 444 44 7>44 ##5. 4#4. #44 2.447]- 4 4441 44 44 444 #47]- #444 444# 4# 4#"9 *114(step edge)42 4 2 #4 44 #414 2.447]- 444 44* 4*44 444 #47} 4444 #44 # 244# 222 *114(soft edge)42 44. 222 4^14] 44 24# 444 #4 (aperture)*1 4# 44]2 44# ## 4#2 #*44 #4. # #*44# #4422 4*4 7p§# 7}*4# 4* 344 4 44 4*4 314# 414# 4*4 "44 #4 4 #4*11 444 7l* 427} 44.
-92-
W-7lx>7> 5 y 14€ Til 4*114 2.2.15. 5## 4" #5]
4 (blurring) <>] 444 4 #4 4414 4444 4^1# 4 ^''tirlHrtpoint spread
function)## #5] 4444^(defocus operator) G# x\ 2.2.23)- #o| Vj^'S 4=
5$4-
d(.X, y) raw k+S if S if x<x0 4 2.2.1
Kx,y)real= f f G(r,c) • I(x,y)raujdxdy 4 2.2.2
I(x,y)real= 5- e ^ 6k 4 2.2.3
V %:, y) rw= A •-(*-*/)2
5- e 4 2.2.4
/dl(x, y) reaj
dx= A • 5 • e 4 2.2.5
#5) <^4"-& 4# 44 $1 444(laplacian operator)# 4-&-4%l 4 2.2.44-5-5
S.## 4^ $144 "o"4 44Kspatial constant) cr# ti]2-4 4# 4444 S-4 <8t1]
#5] A)# # ^4. 2.2.2# 444 <£4-4 #5)71- 44, 444# 44, 4
4 4# 444 #7)1# a4#4.
-93-

blurred
dlblurred
dlblurred
0^ 2*M^r
Vx-axis
o.^ 2.2.2 l*Hl 4M, 7H-6> -m-b] *1^ IHr <$<# ^
-94-
4 84# #4 4-^r# #444# #4# ^444% #414 44*41 $%44 SU#
4#4 S# 41 #41 &# -2.4# sw. 44% #4# #44 #n*\ Lai[5]fe 4
2.2.34 %## #4% %# 44# #45. %#4 *4# #4%$4. #4% 4 2.2.3
4 4~f44- f-^4 4-g- ## %#4 1N4 44#4 44:4 &4 44a. &7l 344
4" 4#4 4*441 44- 4*-t-4 xl 4^4:(local minimum)4 w}4# 4 #4 $14.l*Ms. iLJL4414 34% 4 44 #4^4 44 41444*4 ^4445.
(gradient)7> 7>#4 %33 3%^ 4# #4(4 2.2.5)# 4-§-44 #44*44 #4 4
#4# S#%4(standard deviation)?!^# 4#44 #4# 4#4 #4 #4##4.
2(/ • «f)M= w „r----- 4 2.2.6
0=2/ • (*t—M)2w
/ 4 2.2.7
444 «# 44# 3%%# 44*% %3## %%7il 4#4 444^-44 #4 4 =L7l# %444 4 lOxio# 4#%#4-. 4 2.2.6# 4 2.2.74# %%3 #4% 4 2.2.8 3. 4-4-% f $14.
<r=2r-^
w
T^xrj_,22/ }
4 2.2.8
44# 4#44 0# 4% 4% 44*444-4 %#4% 4%(iterative operation)4
%3%4 &4 41 #4 34 43711 #4# #4% # §131 44% 44444 444
-95-
§143 #44 314# &4435 ^11- ^ $19 444 $14.
1. 4] $14 #441 4% ^l-ir^] 44 44(Simulation Result)
4444 7>9a)# #3 #4 4 41 A] 45- s|# tij-^dl] 44 #4 #9 °4 9# 4 4) $14 ### 45?#) 5# ## A] ^>4- $t#Aj #44^1 41 $14 MM 4 ##449
3l# 4 9 $14. 41 $14 #D4 #### #7> 4-7] 4417-1 #54 043. 7HM$1 #
94 4415:41 10%3.7)$] 4#(random)343# 3## 9 4#44^4 9^444-
100444 7l# #4 4 #"(artifitial image)4] 4141 A) 4^4 4 $13 IBM 486PC4
MATLAB# 44-4-4 353# 4$14-. 41 $14 #^4- 45. 44 #441 4# 4144
444] 4-# -2-4-4 Mt 44# 3)35 9# 4^ 4] $14 #44 #9 #5 0.008
243 43 44 4-44 #949 1.235. 4]$14 #44 99##- 4 9 $14. 444
4]$14 #44 #9 % 435141 449 414 §14 #4# 9# 41 4 9 $1%4.-g- CH417-1^- 4-0-4 7>4144 439 F7> 1.343 3#7]5]7} 200mm$] #3#
4#9$4- 441 #44 34# 341 44 44)71 te4 35)7119 44s. $1#4t-1 #
4 ##4 949-711 44434 944-
x#4 y#4] 44)7-1 45. 9-414 4 4# 494 a] 4 94 #9# <r, , 443 s>
4 #4 49 <r9 4# 435. 941# 9 $14. [5]
2 ,2 n(T* 9 ffy
4^1435. #44 44 4445)4 51## 4#4)Al 7)5)5 444-711 44. 44#
4## 7]# 9 41 $14 4#35 ##4 7]5]<1] 4# #4# 200mm4lAl 350mm7]5]4
$19 #7]#4 7)5]!- 45 8%4 7)5] 345 4#4#34 #4 9tl# 45 12msec
#5# 444) $14. 449# MATLAB# 4#44 ##444 $14 #4 353##
— 96 —

HAU# o]>y- l-Bjo]
4144 4uLb]#4 441 444 4444 #a.sl##7} 444-4 444. 4444
### ^444 #44 44 444 444 447} 414 4#44 444 431444
44 444-tII 4-5.443. 44# 4 44 435 4444 $14-. ^#44 #a.4#4
*944 OT-5.3.44 x, y#4M4 14 44 445.5.44 4 2.2.8 4# 4-§-#4 #4
# 4-4#44 444-4 4#4 444 444 4-4-4 4-34-. 44 #4# 444-fe-
44-& 4-§-4- #4-.
1. 44 44# #444# 640x480-2] 8u]j= 44# 4#* 4#
42. 444 4435-^4 Ix= dI^ ■ iy=~%^ *
8. 44/ *(x, y) = max {/ 4%+A ^), for —10 < K10} °/3Z 2 I X(x+k, y) > S,A*=—3
44 x# ##35 44/ x(X,y) 43Z
/ 3,(^,3,)= max{/ *(x,&-H),for —10 OX 10} °/3Z 2 / y(x,y+k) > S&*=—3
#y# ##4 44 Iy(x,ye) 44
4. «#4 44444 y#4 4444 44# 3### 44# ^44 #3* 44€4 415* 4##4.5. 4 4444/47/ 444 <r,,<r„ # 4*44 4444 4/4# €43444#
4*44 4^4 4# -4## 444 <&,<?,4444 3##jz Lai4 #43
3 24# #4# 4# #4
-97-
334 14 4533 /y d/(*. y)dy 545 434
A,-= 2/ • 4, Bi=Hxi‘T, Ci= 2/2 # 54# 434 €55# 444711to
€4- #4 #41 1414 4711 3444 "344 3€ <34 444 ig^ 85%434 44# ^«14-711 44. &4 414 ##414 Ai, Bi, Ci 44 5444 #4# 4#4 444 #44 44-4 7}544- 4#4 44444 444 44 ifis1# *3 444# €€4 414 44# 4144 44414 444 7H# HAU(hardwarizedalgorithm unit)4 5.44 "3# 44 4—4144 44:4 4"3i5l#4 #4Til #4# 5
#4.44 7}3 #54 54 7}#€ 4-44 640xgbit 4j£i €4^35- FIF04S.4#
4#4-4 5-44-31 4# 4#44 EPLD8M 3# 44 44 44 #4H4 4##44 €-8.4 <3# 44 #314### €-841 44- 54 4 5 #4-
# 4144 #3.4#4 4# *3## #4 444-# 444 €-8-44 #£ 4441 <3 44 #444 41£.44 444# ## 4# #44 444-8.5. #44 #44 7}#4
4.
3. #4# 4#4 44 #4414 #414 €45444.
5#41 4#4# 4414# 3#€3#€ 4544 €44# 4## 54441 4# 54444 444 34# #4 444 7}#4 54447} ## 44 #5# ##44. 7}4# 44414 W# 344 3## #54# 444144 4# 44 fe4 #4# 4
#55. 44# #4-45 #4 #4^17ll #3. 4 €#41 €5 444144 44334 3 3=4 #4 4444. 444 54444 7}## W# 34# ##471 4€4 /}#4 5 #55 7M# 4444 W# 3 4# # 5 #5 33 4 #5 ## €44 53# 7}#3. ## 34# 5711 45 #£41 4€4 54 €#€ 33# 41544. 444 4 3# ##4 413# 33 te€44 444# 34 443i #4355. 4#45 7}#€ 53447} ## €54145 #4 4444. 444 444 €## 3i#4 33
-98-
447V 134t11 44.#51# 4#4 7] el 4314 te Sfl#41 4*114 444# 4## ^4-
44- zz.1 2.3.1# #14 7141 $1# 441 141# #^4 #51# 441 3M4.
4 2l35.#4 1-51 si 44 4# 14 444 444 4271] 44# 4# # 4=
$14. 214 4# 714# 7]#35. 2# 714 $>#4 444M1 4414# 4# ^§4
4435 #9# #4°cM 444# 4# # 9 $12 2171424 4 7144 114#
tip^^o.5. 1 9# 4# W4 4444 #4 7} 444# 4# # 9 $14.
## 71443 #442. 1# 444 14# 444 444 #4 %4 #44# 4
371- 4# 4## I24 44^44 13 21444 344 4# 444. 44# 44
# 3L7)] #34 ^4 444 #44 #34 4444 14"444 3^§^(misalign) 4#
4 #4# 4444 444 #3# #44# 34 44 #34 4# 4444 444#
4 ##4.444 #44 44 1### #444 #4#35. 21#42 4# #432 34
43 44444 44# 444 #4# 4# #4344^calibration) 244 44 $1$14. [Juyang Weng 92] 244 #44 4# 4## 444 44 444 7>4 447}4
444 444 4# 4#4 4442 444 4$14 #34 #44 444 #244 4
## 414. #4 4444 CCD444# 4#4# 4# #34 4# 444 4# 4
9 44 949 #44 CCD#4 7>44 #43 44 2444 #4.
25] 2.3.144 444 #44 44# 4# *H21 #444 4#4 #4# J.
Weng4 314 49441 4444# 4# # 9 $144 #5] 4 27] 4- 2# 7141- 7]#
35. 24 2#Tie] 1#4 W# 714444 #44 4#°1 424 444# 4# 2
1*344 #44. 49-4 444 2144 4&4 4#42 214 4444# 9-4-2
4# 4-8-44 #4 #44 51# 421# 4#44 2^4# 44 44 #4 &4.
# 4914# 444 44s] #411# ##44 2# 41441 44 42# # #4
35 4#471 444 44 #4# 7l#35. 4# #44 414 #421444] 144 7] #424 44-
-99-
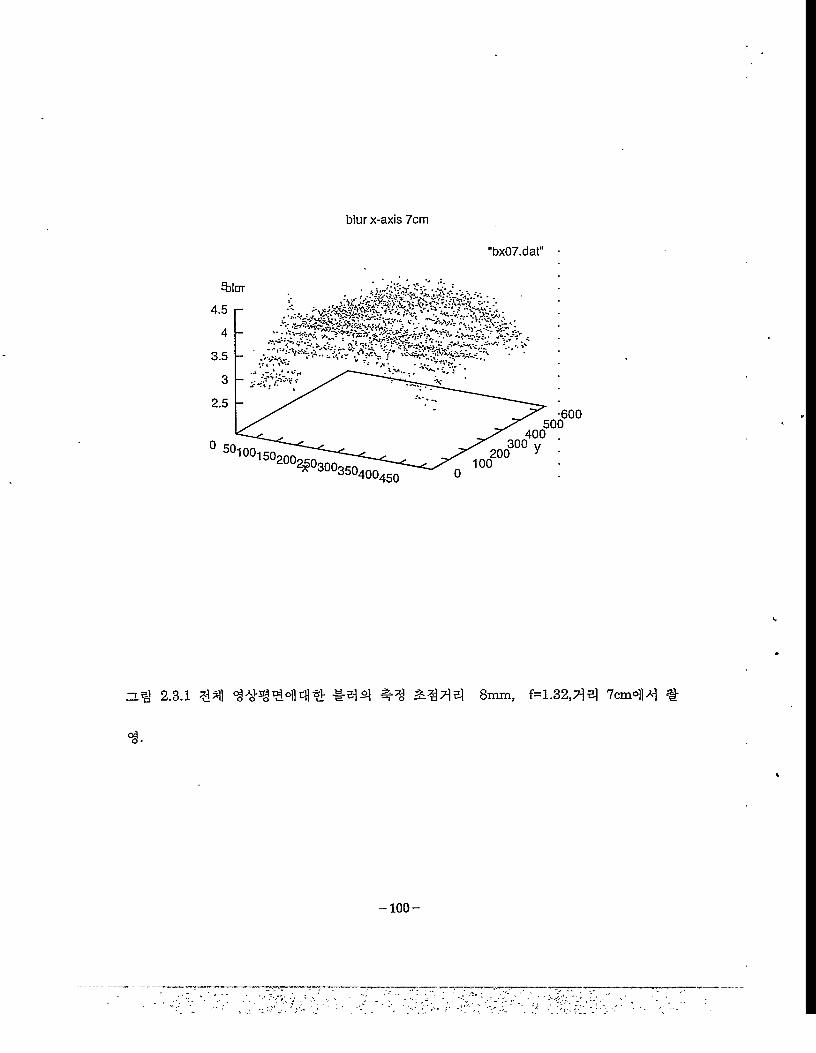
blur x-axis 7cm
bx07.dat'
ms
2.3.1 ^3^5} 8mm, 1=1.32,7^^ 7cm4M #
100

4# 991- 49#4 €4544#9 # 4 2.19 49#4 &2 44 #-& o') 994 €4544#9 4## 2.1^4 2#4 44-44 444 &4 #9 J§#4 #44 4# #5] <£# ^## 5:442.5 ### 9 $}4. #4 44 9#4
interpolation# 99 o]^>y 4#1!4# ##### 5:442.5. 5#4# 9 $14-
4414 $1 44-E4 9-41: 444 44 #9 444-4 9444 #4. 444-4 %
45-44# #444# 444 ###4 4444# #44 44# 4444444#4
41-4 44 #9 49#4.
€3-M.4|0l#-i: 4# 44#
Rulei% -,: If x=Ak and y—Bk and z=Dk then a— Ck 4 2.3.1
444 41-4# 44 #9# Ak, Bk, Dk # 5944 #4-#4# 34# #9 9
41- 444# 44 #9# 44#4- x, y# 4444 444444 45# 4442.,
z# 4444494 444-4 44444 44# 44-#4-. 2# 2.3.244# 444 4
4 #94 A*, B*. B*4 44#41 #9# 44#4.
9 #944 492x1- ## PUMA594 4 #4 444 444-4 49 2-94
4# #44 a>44 3.44 4#4 z49 44 2m44 10cm925 24°1 44. £#
44 ### 640x4802.5 94-# 44 $144 4 4444 44 #9# #4 #4. #
# 4#4 #9## 49 #44 444 #9444 4444 #4425 4#9 ##
92 $%4. 244- 9 #944# 44 #4# 49# #4544#4 &4# #4 ##
44 ## 4-4 444 9## 44# 7>49 944# 42##4.
#4##4 4-5. x, y4 444# #4 #4 640x4804 444 20x204 a#4
49 ZLBlH(grid)5 9x1-## #4. 5# z#4 9x1-444# 5# 4444 #4# 2
44-4 994# 94 #4. 594 4944 7}44 #9# 44# 4444 4571-
-101-

#3-44 44. 444 #4# 4 #4 44 454 #4# 4h4 #444 30<m444 44°fl 444 4=s344 43. n°144 444 4444 54 y#4 44 454 &#
4- #4# 4## 4= 44. 4-4-4 #44 44 444 €45444# 7cm4L4 30cm4
44 444 4=4# 4-4 44. 44-4 7cm^-4 30cm4 444 444 3cm 44s. €
45.444# 4=44514. 44=#4 4# 44 44=# 444 44 #4=## 44 4=
# 4#44 3^ 2.3.24 44 4444-
■
10 30 50 70 610 630o o
10 30 50 70 450 460 470 480
nU 2.3.2 44 #44 £#4-4=
-102-

sM #4 ^
4#As 44 9M-& €41 €4 4-4. 444 ?MbH 4-9-44 €41 #44 44
(depth) z, 41 #4'44414 *4# #4#2 4# 4444 444 #44 #44 zi
4— 4141 #4#4 4#4- o. ^4 #4#4 ?!-# 45as 44 *# 44W. 414
44 #44 x, y, z414 #44 cr,* 444-4 4-B-4 #4 n4 2.3.3414
#414- #4A444& 4414 7cm#4414 44# #€€- 44-#4.
Initial Rule 7cm:blur y
30
3*g 2.3.3 2:444 8mm, f=1.32, 1# a)*] -g-2]
-103-
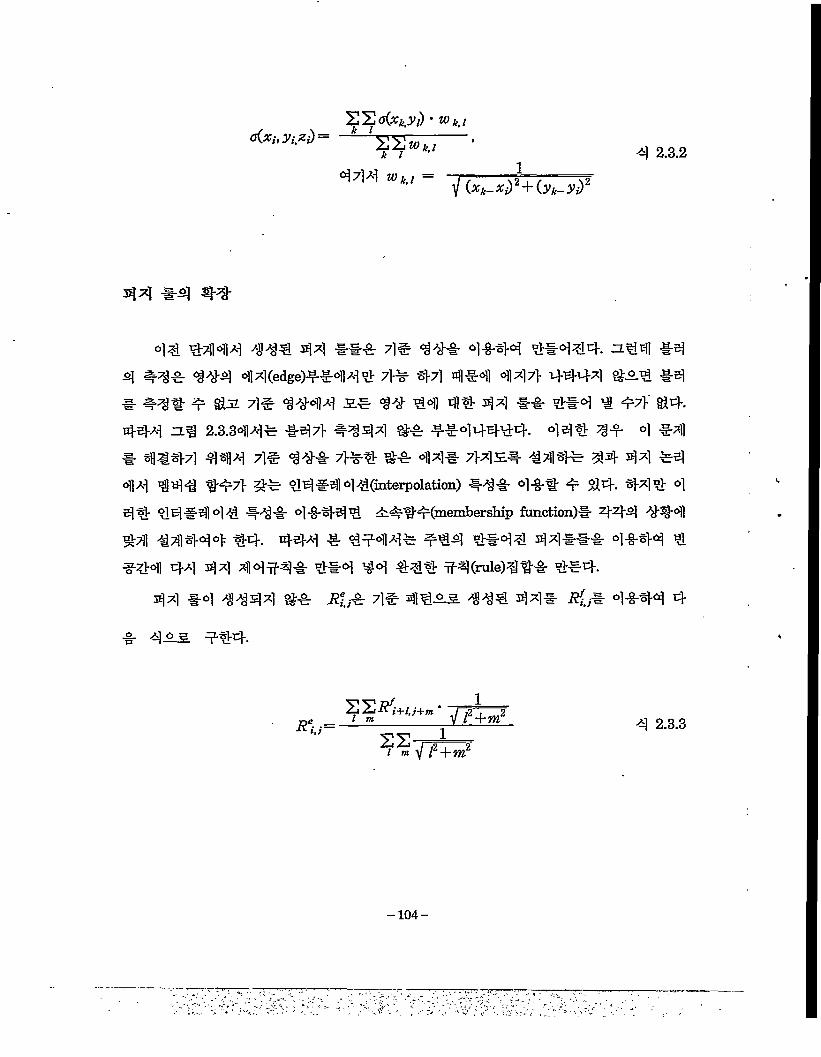
22 <<*6.3'/) • wk.ik l22m;*./ 4 2.3.2
444 w*./ = 1Y (Xi-x^ + Cyt-yD
44 #4 44^
44 4444 44# 44 ### 41 41# 4144 ##444. 3.44 #4
4 #4# 44-4 44(edge)H44# 7}1 4-7] 4114 447} 444-4 434 #4
# #4# T 43 4e 4144 2.# 44- 44 4# 44 #4- ##4 # 17}' &#. 4-4-4 34 2.3.344c 1-47} 1444 #1 11444-4:4. 444 41 4 141# 41^44 444 41 411 7}## #1 44# 7}43# 1441 44 44 14
44 #4# #17} #1 44#4 4^interpolation) 141 41# 1 5ti#. 44# 4
4# 44#4 44. 141 414-4# 3lll(membersliip function)# 4"4"4 13M1
#7)1 #4444 44. 4-4-4 1 #1441 144 ##44 44##1 4144 #
1#4 44 44 4414# ##4 #4 #44 14(rule)##1 #14.
44 #4 4444 #1 i?L# 41 4435. 44# 44# #L# 4144 4-
1 435. 144.
4 2.3.3
—104 —
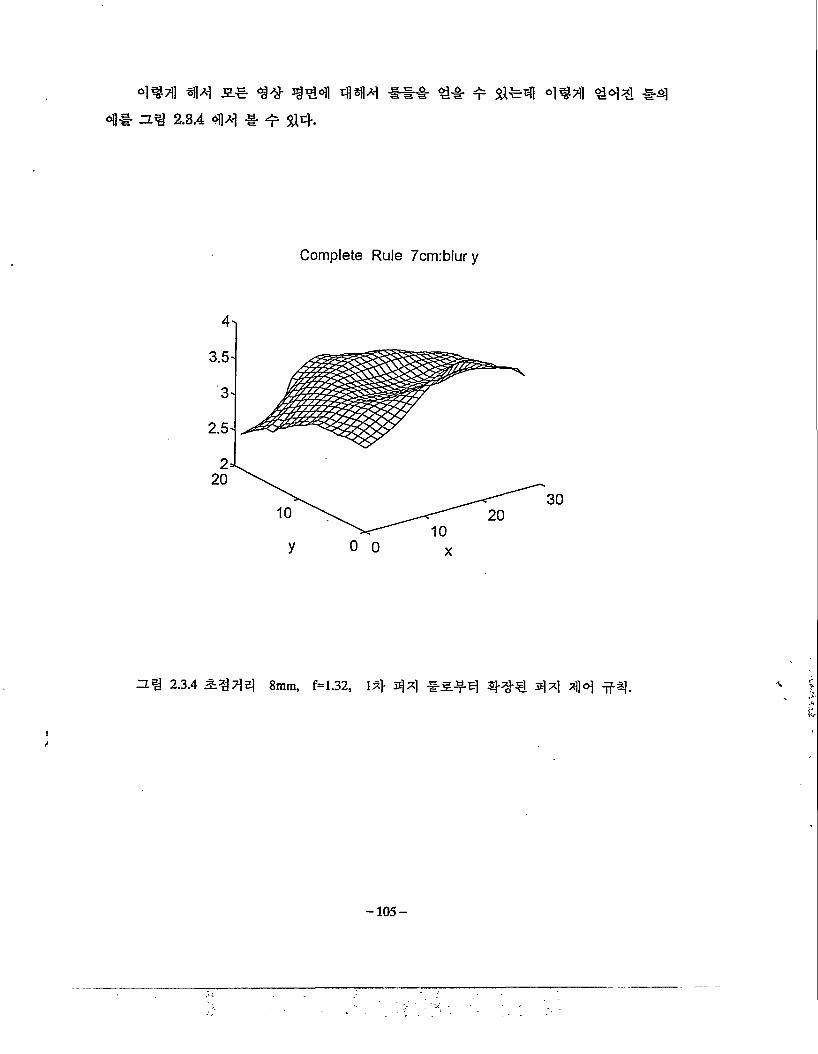
c-l^Tj] S.-E- ^^4] tflSflAi ##& ^ ^#4] o}%?\\ ^ol^l #6]41# ZL^ 2.3.4 414 # 4= ^4.
Complete Rule 7cm:blury
30
ZZ-H 2.3.4 8mm, f=1.32, 1*} jeJa] 3^x] ^]o] ^z).
-105-
0ON1
to _>3
-to
lVi
ItP+
P
NIIto
to
+iY
IIto
P
M
P
.to
'to
CLVi
II.to
i «
%%
r$-b
P
fti|o
2A
9 AK|A A mini mini minn2 & m|o _2-o %» tf,
r-bI-9.I
$
1mlraminAHimb
888
£§a
IA IA IA^ ^ ^ A IA A1!
H- H- -f-
!§I«K1
to A HIX A AK
m2 AX00 oAII A 4bg rfi, rb
A AA A AV-/A *2 nrAA
mb4>
oEA
A
4>*2N
oS,fttA
lPU ,SL JC,°li A AA 0
oS, j0% f AbJ A
V AsAwA(A
minA1s #*S
A mb A B
=S C2c&
mb
ojb
idE4i
PVim|o
-i[boMAA&o
A$AAB
okNr£N
J|H'oMA(ll&-IV1
to
to
A*r
IVi
IIp
pS1M
P
Ao
5AA
AA
4iAmbAIt
aa
AB
oM,(tf
r£mbjffiN
mbjfflojLAAs1
A
COH->A*
4bdmS;AA*2A
iAA1AB|t£AAikAAr|r
AA
$(12AA
AA
4iArb
*MA
AA
n2AA
AAV.
A i £Vi mbto A Hi BCO m [U 0°,I(L /gsm 0 o2 pf
A i«b chA A S,
loBa
-Rla
B #k
i llp-fv
g>hg
>
3
daB
A
I
I iB Ofca «*§ A B B B k ja s
I *~ S
A mft: A m$ ifidB B da -ft oM|nA
Ja 0|i.
rfi, n# rftB -ft' trt. BB B 0 B B
41
mg, min: JJL lUjorH UB Dffl X
1+
ff
minimftrfmin-ft
41I © _2 rft
COCD
Bcy-B
namft-ft
-ft
J2, °l<1 m[n m2 A rgi
SiJao£t
'iiJa
A B » rgi 41
Nmin Hu$ *_o *oft (u[n-fi. Bmlc B B B m[m B
rft UoB
a g-jo OO
2 *A ntgB -2.Mg -£- (Al 4l
i Irgimini
S1
BB
B>
mft -
o 52$ Mrg!i o(dCtt (Brfg * B mg B B
Brgi
$cS,mft
B
tB
h-»BB
Kn2B
BHHBBo2,
$A
V.
B
B ft' Jg r|r B JaB - a B MS B k B -ft:41 rir r-jmB B ^
oB B . (ute Ho m|m^ B
Ja NX ^1 IS r|rmft: gg B rftN
B bo cfi, B ^ og Aoft *-vO
mft:B
mft:B Hi 41B B B A B
iN(ft B o
BJa
Unfflto
_av.
qv rft mft: Ja Ja
#A B Ja
-ft
*241
Ja rftB mftmg-ft MS
BBB-ft
Brft
'&
Av. H
a-la
gc* #
k# k&
-fc^
k&-k
#% k-
klkU
W
Ppkk
k --tapi
-ta-h
--k
p, B-S
-k kit
e 16- -e
^klte
wla
# kk#
^983 k
ir W
o-#
•k ’kt
S ^ -g,
it
k kite
k b
Br k
k#
^k^-
kite k
irk I
te^
"E" #
lte-k
k-kk
k -k
kit- k
lb-^
-^-k
k -k
k Ib
-nrA
kk-k
P? -R-
Q’S
’Z ki
r
mftma-ft
&Brgid&BkABB
1maBroii
BBJacfl,
A
Imft:BJanBfmini
£ £ * £ £
^ ^ ^ ^^ H ^ X
BkCOcn
=Z
tldlff
nQ—
S) pue
T+ry
=<f pU
B W
y=x'f
l •
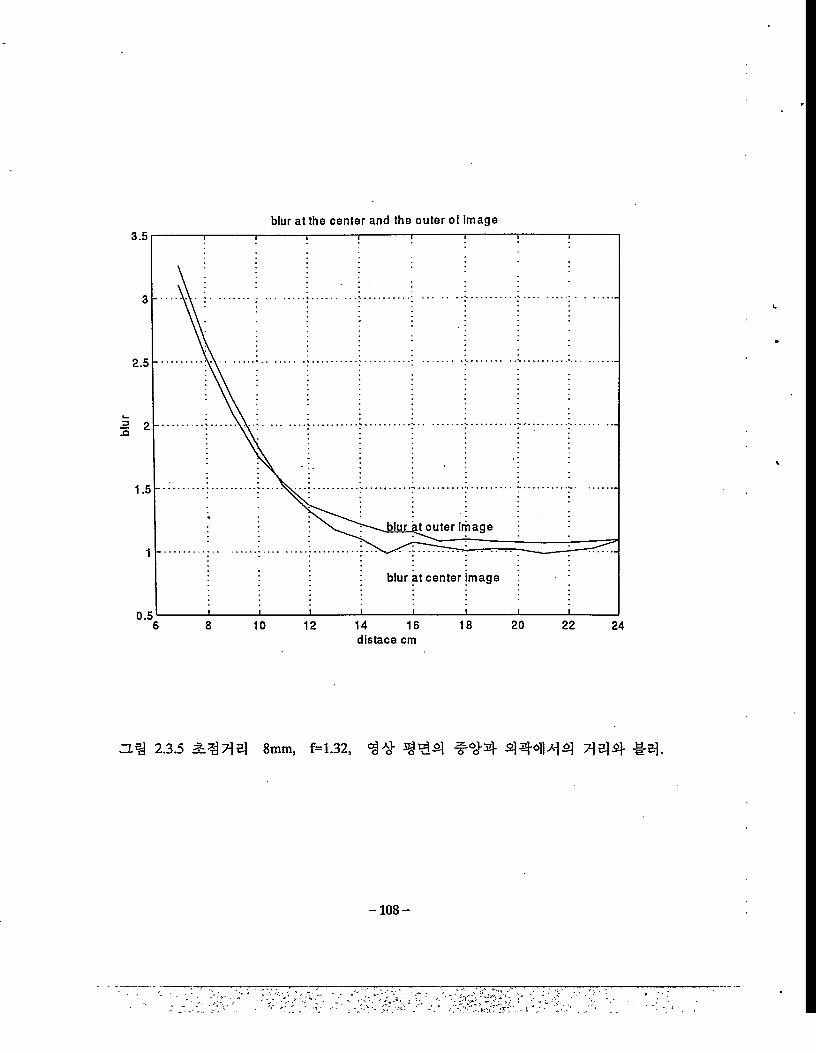
blur
blur at the center and the outer of image
jit outer image
at center mage
distace cm
ns8 2.3.5 ^TlB] 8mm, f=1.32, <$# ##4 4 #4^# 7)5^5}- #a).
—108 —
*
ZL^ 2.3.6 A>-§-^ 27MM
-109-
I
ZLB] 2.3.6 1-5]$ A>-§-^ 27MM “3#
-110-
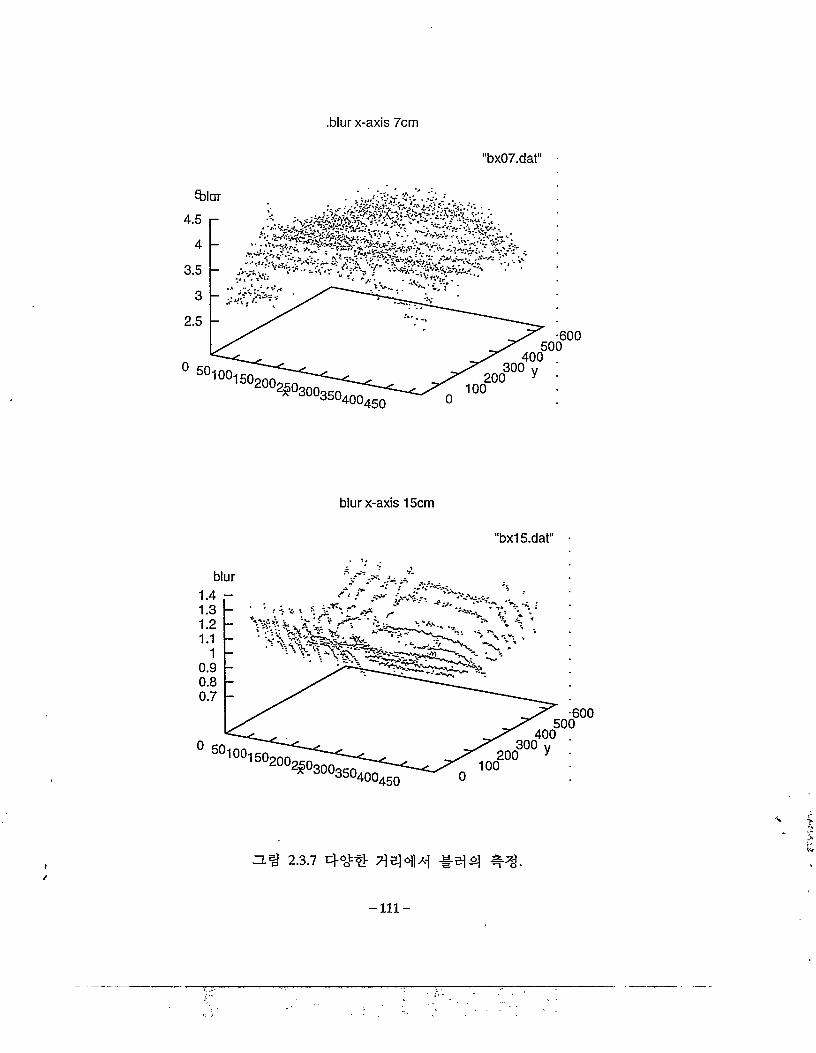
.blur x-axis 7cm
'bx07.dat'
4.5 r-
3.5 h
blur x-axis 15cm
2.3.7 4^ 4^.
— Ill —

blur x-axis 24cm
'bx24.dat'
blur y-axis 7cm
by07.dat'
ZL& 2.3.7
-112-
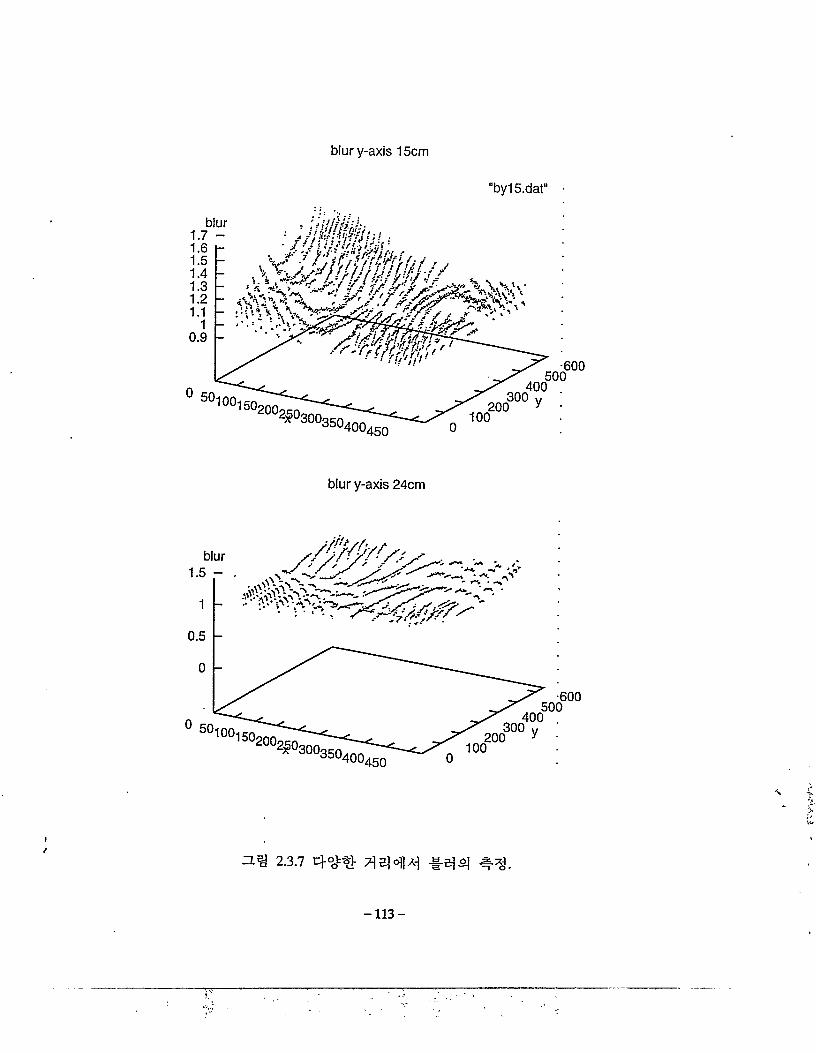
blur y-axis 15cm
"by15.dat"
blur y-axis 24cm
2.3.7 Tie]4^
-113-
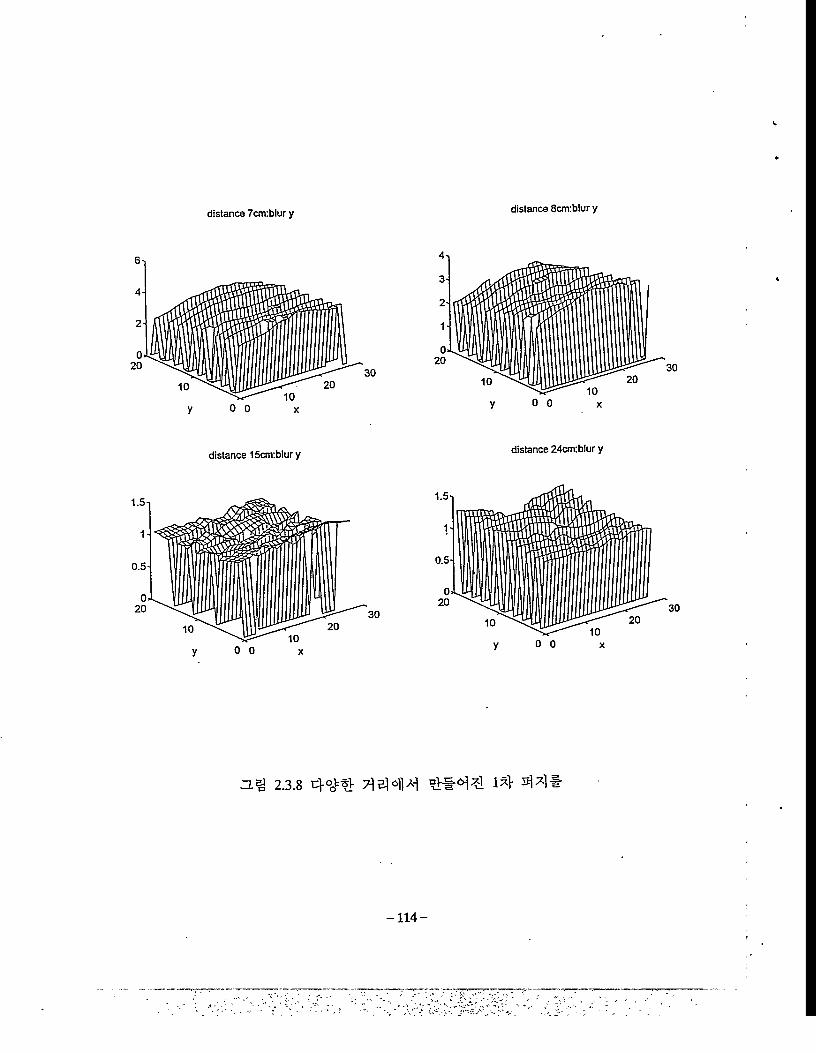
og
distance 7cm:blur y distance 8cm:blur y
6-,
0 0
distance 15cm:blur y distance 24cm:blur y
nH 2.3.8
-114-
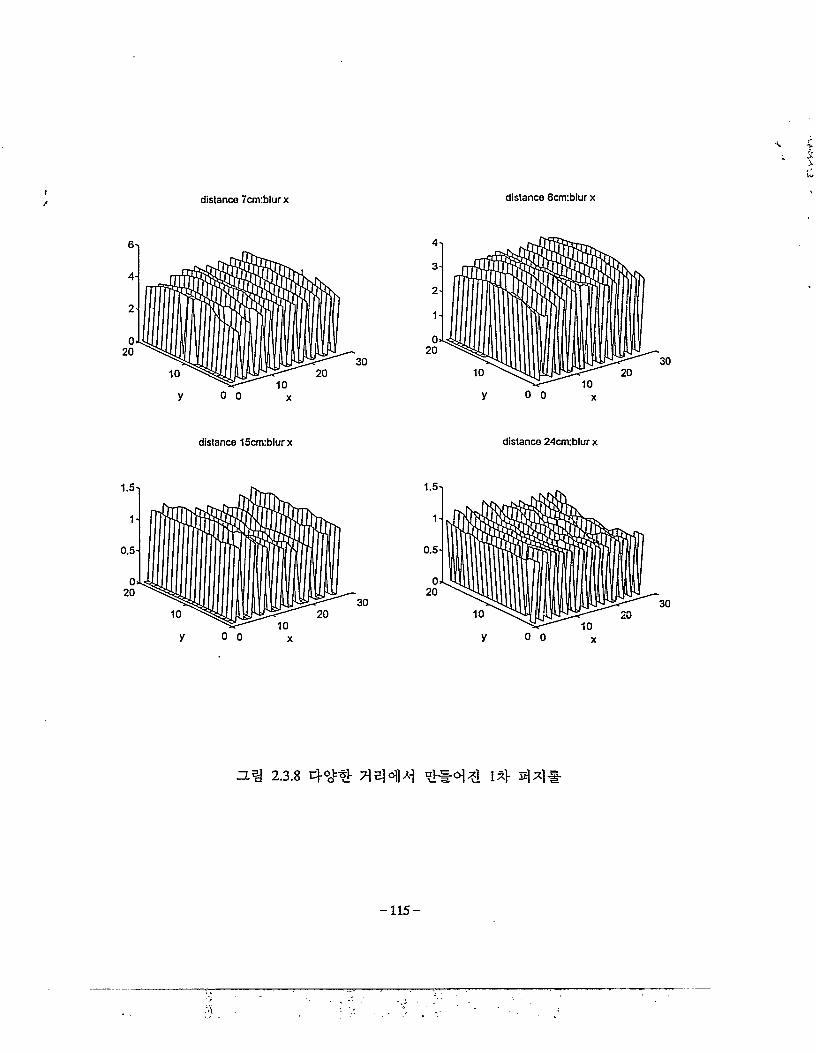
f/ distance 7cm:blurx distance 8cm:blur x
tv
2.3.8 4%^ 45HH 41-4^1 14 5M-1-
-115-
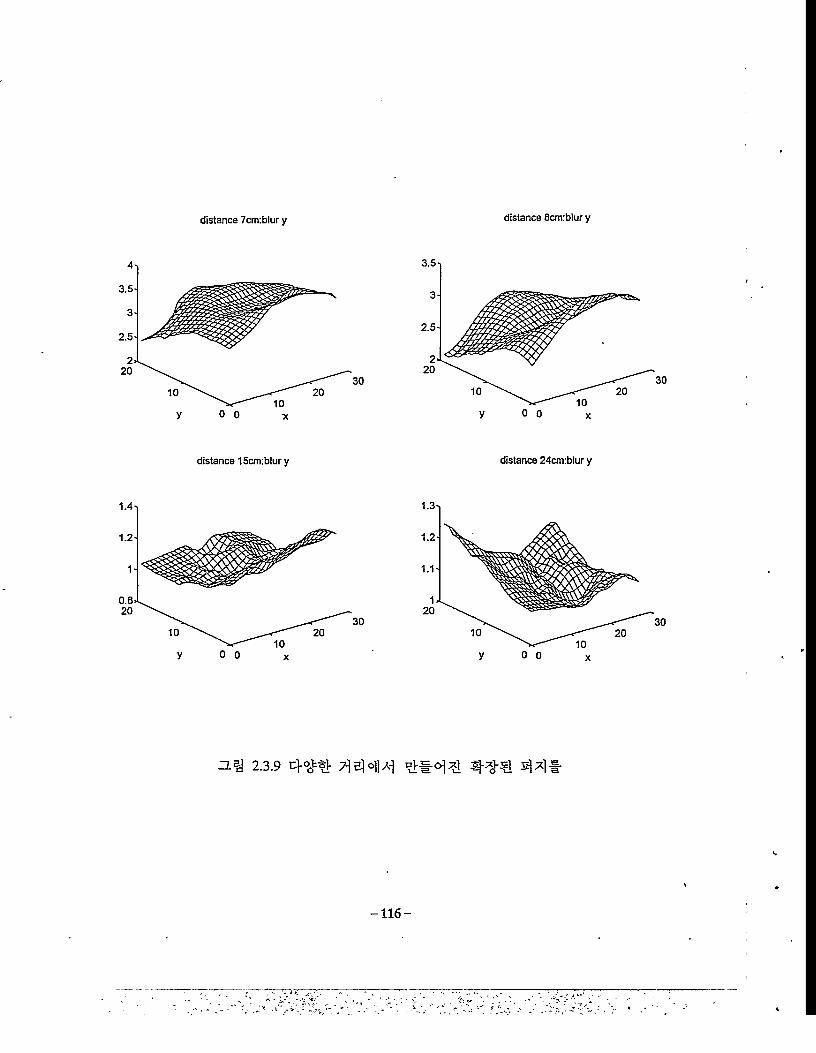
distance 7cm:blur y distance 8cm:blur y
30
distance 15cm:blury distance 24cm:blur y
2.3.9 4^# TlsHxi ^#4^1 4^1#
-116-
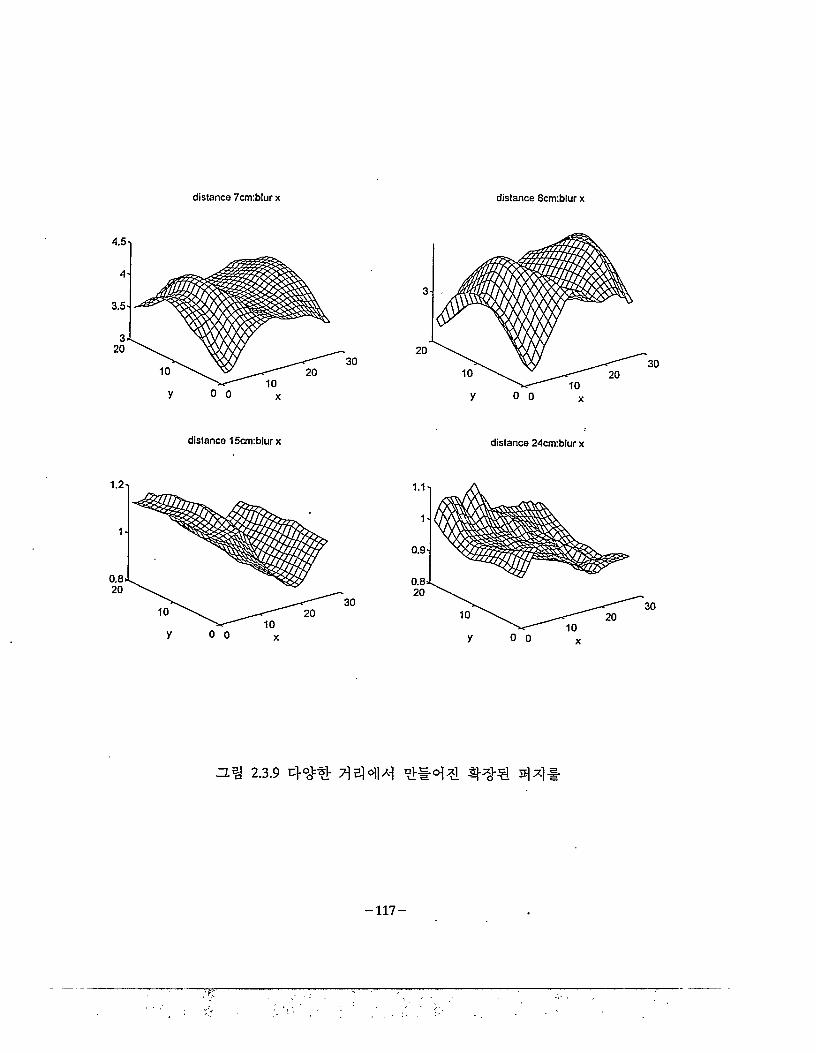
distance 7cm:blur x distance 8cm:blur x
ZL& 2.3.9
-117-
4 3# #44 ^4# 4# ## 4°14
# 3414#  344 434144 #34444 ##43, 44# 4-0-% 44 #3%%# ##44. #4# 4-0-% 44444 4444 5.44.
1.  444 #42l-§-4 4444 3.4 2l-§-4 3-E(ultra-sonic range unit), 4S.%4 -r-(signal
generation part), 44-f-(control part), 7-segment ###(driver part) 435. 4##
44- 4#% a-g-4 444 6500 4%(series) 54, 44 44 %5# 7>^3 $)4. (ZL 3 3.1.1 #5)
7>.  at
% 4444 4-0-%  444 #454344 6500 7)1 #54 37)] acoustical
transducer4 ranging circuit board5 444 44 $134, °1 4 44# 4 #44 4
41cm(1.33feet) 44%44 $1# #44 444 #4# #4#4 44- 4 6V4 power#
4-0-47H#4, IC-chip4 #%% 3€# Aj-0-%4 45.# #4%4 444 434 $1
4. 3b)zl, se% , #%44 4%#7> 34 444 44(device)5 44 $144
44444 433 7j-*]3 $14. 35)4, %7M #43)4=% 44354 #3^)4 444
44 4= 400V4 34-4 # #3 #4 44 334441 #4,45# 4444 $14
4 #33I4:%4. ranging circuit board0))4 4#45.44 33# 444 3# 97)14 3
4 7114## #44 4-0-%# $17)14 4 $134, 4 #414 33 47114 3
(Vcc,Gnd,Init,Echo)3# 4#44 7)4# #3%# $14. 444 34# Init# #
##47)714% pulse4 44# 344, spec°)14# 4# high7> 100ms 4 #4 43#
3#43 $14. 3% Echo# /l #44 %444 #4#3#4 #33# Signal4
4. 6500 43# Init signals) 7fsfl3#4 167H4  pulse# #343 434 %4
# 3444 Echo5 31334.
-118-

nil 3.1.1
^e| $3.
RBINDN I CLFV
SECHENT2
RBINBINLOADCLR RBON2 13
CLK44 115 10 C CQi>63—4tfutrot~!>CAP NP
LTN OE RBIN OF BIN OC

4. #:§: 4^#
- 2i#4 -##4.514# #7)14 signal pulse?} 4# #4# 4"M"4 Init
signals} ?)4# #|?1 44 signal pulse?} ZZ.:#44. Init signal# high-level duration
time# 100ms 4H3., 74HC14(schmit trigger)# A}#u}4 R,C# ^#44 44 4 S#
&4. # 44 4 A)# R=14.97k,C=33uF# A}#§}4 #3.# #7ll4SS4, 4#
4 3]5.# 7}7]al 4 494.01ms-2] hihg-level duration time# 4## 5S}$4. 44# #
#4# 44# #44 Init#3:3} 4 #4 Echo#J:4"4 aI^a]^ (delay time)# 4-4-4
#4 4s 4 4 a# :z#4 #444 $># 7}xiji ### 4a#f?} ^44# ^44. n
#5.3., Init #5:4- ti|#4 ?MA]4# #4= $1# <944 t4-t# 7}## f#4# 4 #-0-7} $}4. # ##4A-)# o] fig4# 1MHz #•#7}(oscillator)# 4#44
4?il4$4. nelJL, o] xijii- 74LS113(JK flipflop)# 4#44 4#f44 4##s#
4$t}.^E.a)H3. 4### 444 f ?1# 4us<y# ##^4.
4. 414^41444^1# §}4lAi 47)1# 2.6us4 #447} 44 44444^14 4!4#s# 4
# ?!## 4s# #44444 44. 4# 4*114# 44 init#^?} high4s, Echo#
J:7} low# 4#444 444s# 4444, s# 4444#41 4^1 init #&?} #4
S#, counter?} reset4 4S# 44 4^1 Of# #f #£# 4# #3.7} #^44 4
4- ## 4 #4 4S# l?H4 inverter# 17114 or-gate, 17114 and-gate?} #^_4S,4
# ##444*11 a1# 4^4 344 4# #4 4-fi.4H3., 44# #44 43l#44 4
4. ZL4S&, S# gate# 1?H4 74LS04(nor-gate)# 4#44 #4# S3 4##44
#7)14444 44. SB) 31, 4#SS counterz# resets 3.4 f## 4#4 ^4-
counter# 74LS192(BCD counter)# A}#44 #7)1# 4#, counter# reset#
high-level#444 4#4S3., counter# reset47l 4@H## one-shot pulse?} #A4
7)1 44. zi44, 444 pulsed 4##44 44# #1#4M1 44# #S4#,?}##•#• 4# 4 S3 444 44. ^.#4, 444 pulse# #rfl #^##(22 ns)4
74LS1924444 #*H# $}SSS, 444 #4- s#44 #7)1444 44. # 4^4#
-120-
# 74LS121(multivibrator)# 4 #44 44# one-shot pulse# 1H§ #A#
## R=17.94k, C=lpF# 4 #44 4= 25.116ns74^4^# ##
one-shot pulse# ##4^4.
4- 7-segment ###7-segment #### 74LS192(BCD counter)# 4## BCD counter##4-
74LS47(BCD to 7-segment converter)# °1## converter##AS. 444 ## $%4.#
•€#°ll7i# 5.# 4;M 7-segment# o‘l#4AS 44 471444 :glA4$l4-.
74LS192# LSBS#4 MSB44 carcy^ 444 4444&A4, #?] MSB# non
leading zero suppressionAS #443=.# #^14^4.
2. 2l#4 #74# 4## 7444
7>. #41444 #4Tie]# #447441  4^7> 44#4 a# 744# #^44 asM-. #
#4474# 744 #4 AA#ol]A) internal blanking# 4 74 #4 $gJL 74 B]#- #444
#1?4# 4 #4^4. 44# 'S#, - 47471- #-^74-## 7454<>11# ^A^ti] ^^§X|ol
4741 s]#% 3^# internal blanking#^ 4# W#Ji# 74#47l444 4A#
2.38ms## highS 47M#44- 44# t4b]S # 1.33feet(#
41cm)7f 44. 44444 4 #4AS# 4= 41cm4 4 4 #4 #44 7>##^AS #4^
A14, #415. #444 # #4# 4= 43cmS74 4= 2cm^A4 A## S$4- 3544-, 4
54% 4# #4-2.4-st4 ##44 444, oi#4# %4 4W# ##&4. 441 #4
€ count-4 a# 4 641S74 4^# 4#4 ## 44144-4 ##44# # $44.
2*X=340nVsec*100(lm=100cm)*4us*count (4, X(#A 744)4 44:cm)
-121-

44 4# dhe^Sl #5.7> 340m/sec4# A>4#_o.5 ##4 #5 #4^7} $I4.count
4 £.55 414]A] XjlAj# 641# tfl44# 4 43.588cm# $14. 4H4
county 4 #4 ^1431 ##, ###4]4 4PM 44#
3:7151# #^#7M# 4^#4 $I zisj# 4##  #AM #^44 #41
44 45171- ^4^41 44 #4#44 W4 441 4?M#44. 44# , ^## #4#7l41^Ai 43cm4 71B14U1 3|~9-5. #4#4= SI# 44 TlBl# #^#4
tan# 4#44 41/# ##2}-# #A>^o.s. #4# ### 4=^4^4. #41 ### #
44 4# %# 4 l9.5cm5.Ai 4# 4#44 ##=4# #4M, 4 12.235.5a) 45
4 4##Aid]] 444 4444 ###4^5 444^4(514 3.2.1 #5).
4. 4# 444 #^l
4#4 444# 48cmJf4 5cm44-9.a H3cm44 147114 714# #^# 4-3.4 4(zl4 3.2.2 #5)
#5 7! 5! (cm) count1 48 6842 53 7593 58 8344 63 9025 68 9816 73 10517 78 11328 83 12019 88 1275
10 93 134511 98 141912 103 148213 108 156214 113 1636[5. 3.2.1 71444 444]
#X #4 (count)1 - 2 752 - 3 753 - 4 684 - 5 795 - 6 706 - 7 817 - 8 698 - 9 749 -10 70
10 -11 7411 -12 6312 -13 8013 -14 74
[H. 3.2.2 44#4 4443
44 444# #43# #4= SI# 44 #4 5cm#4# 7>4^ #4^ 4444
gl# 4= 634a] 81a>44 %# 7>4# 4t SI4. 44# 444# 4#44 #444
3# 4#4 #4.
-122-

3-% 3.2.1
-123-
U«-tZ
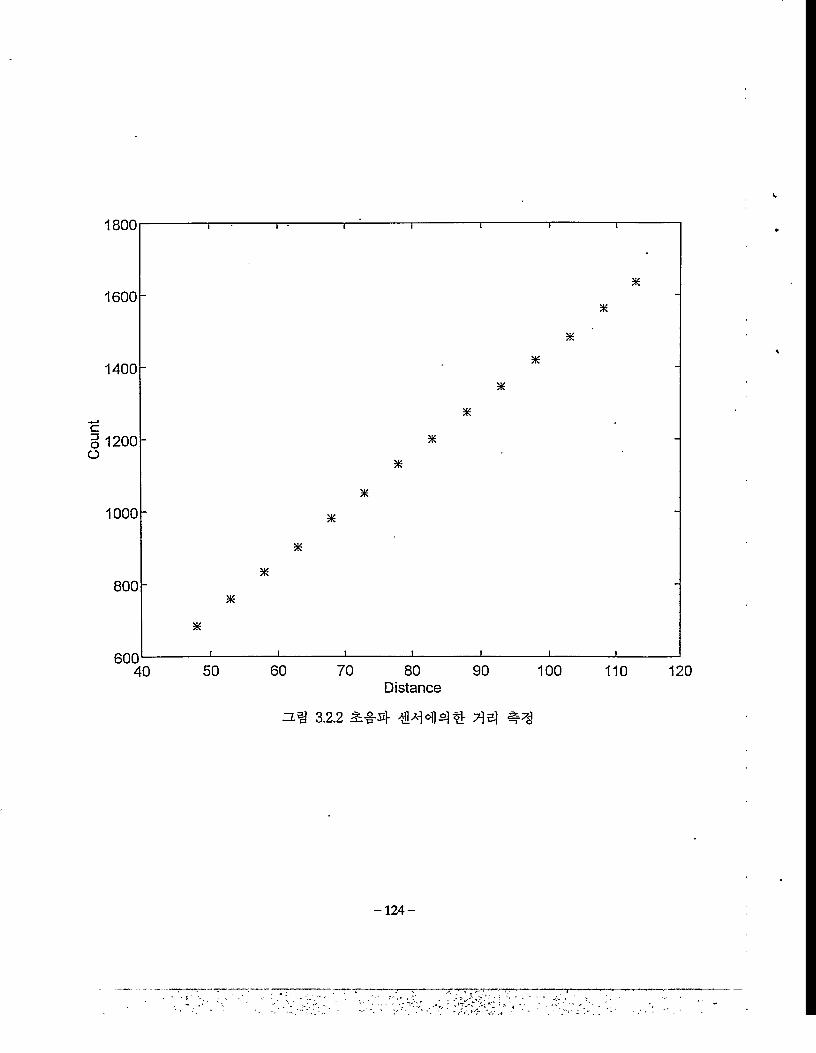
1800
60 70 80 90Distance
^ 3.2.2 ^5]
100 110 120
-124-

W #4 % : 73.23 / 5cm
5# #4: 5.15
4 ^ 5b: 63
4 4 5b: 81
#4 713 4 #4 14.65 / cm
444 44444- #o] 43^- 5cm4 73.23431, o]# lcm4 4 14.65# 44#
4. S# X##47} 4# 444 <£4# 444# 4## f^ES 4# 4#
.2.44414 4##4 4447} <£434- #40^4. Z1B15.5., 414 7ll#44 <£44 #4
444-4:44 14.654 5b# 444711 ^}#44#4= 4## 4:4= 44. 4, 44 444
# 5cm# 4 5.154 ,# 71-4 JL 4E-H5.,lcm4 4 1.034 -2.4-# 7>£4 44=
44. 31437, 014-33- 444 #7115. 7-segment4 5t4 444 5b44 14# 4, 4-efla
4444 4^5.4^ 4-4 4 4= 44.
4. #=94 41444 3#
444 414:4 44 444 444 14.65/ cm4 5b# 4#44444 4#4 4:#
### 4^4. 44 444 4444 #441 44 count5b# ##4a 4# 4414 4
# 441- 4#44 44# 414W #415. 4^4 444 4a.4E.54  44#
4## 714444 444# 4## 4= ## 444.
#44 count4 5b : 2800 —> Til #4 7l 4 =(2800-641)/14.65+43
=160.37cm
#7114 714 : 163cm
54 : (163-160.37yi63*100=1.61%
444, 44 31 #41 444  #4# 4## 7144 #4# 4= i.6l%4 -2.4
# 7>444, 4 a# 44# 444# ##4= $1## 44= $14.
-125-

bh
* *5] 3)^1 7]5]S] Jpgl** #2! 43cmSl 7]e]5.*e| lOcmS)
163cm?M 5#* c-116]4# *^*4 zz. ^#* ***#4. *^*## 5#S] EflolEl*.
*** TlBl^lA-l counts] %#o]cK olBltt *##* **# Ell#** 7>x1jl 4-4^1 &e^4* *#* 4^4] 3§5* *^5#c]q 4= 1.40* 4*4=
444. # %* 4MM 4* 1.03S1 %s] 5** 7>4* #4=44. zz.44, 4#44 *44 M44** ^*4, *44 counts] %* 4,°Hls. 4 14#4 -2.x}
7} 4414* *4=44.
7] 3) (cm) 1 2 3 4 5 5*#*43 642 643 644 642 643 0.8453 702 703 704 702 703 0.8463 849 850 849 850 849 0.5573 997 998 999 997 998 0.8483 1130 1131 1132 1130 1131 0.8493 1275 1276 1277 1275 1276 0.8410 1424 1425 1426 1427 1430 2.3011 1572 1574 1575 1576 1577 1.9212 1705 1706 1708 1709 1710 2.0713 1851 1854 1855 1856 1857 2.3014 1982 1983 1984 1985 1982 1:3015 2129 2130 2131 2132 2133 1.5816 2270 2273 2274 2275 2272 1.92
tS. 3.2.3 7144 4# S* 4*3
3. a*44 *4# 4*4 44 *4ZL# 3.3.1* 4* 5.*S] 44 *4(Capability for Environment Recognition) £.*
5.4 &*4 444 7H14* 4** 4*4 4^1 4^4 *4^44. *h 4*
4(End Effector)®)] -914* #4 *44* 4* s.*4 *44 *44 *-5.5. 4# 47] 5 *4 444 44 #* 4S-* #* * #*44 4* (Vision Sensor)-7H144 7)3) *44 #44 4444 45: 544# &*4 44* 4*# * #4.
—126 —
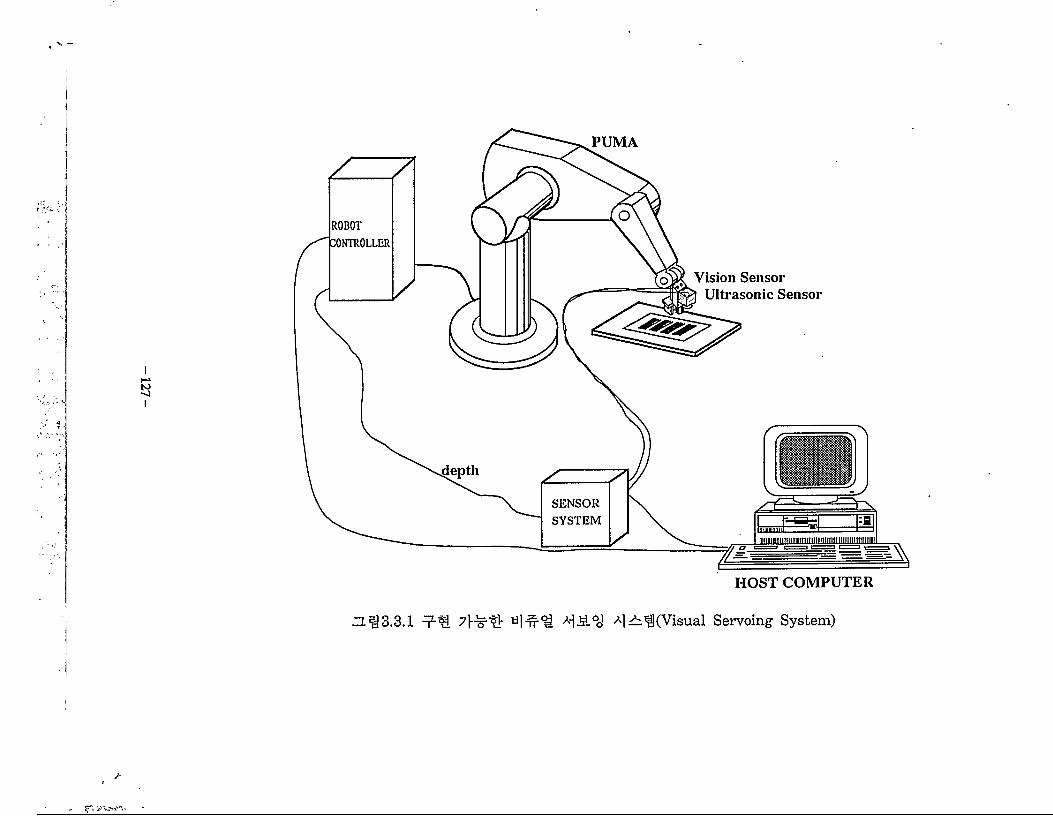
PUMA
ROBOTCONTROLLER
Vision Sensor 5 Ultrasonic Sensor
SENSORSYSTEM
HOST COMPUTER
H^3.3.1 f A1 (Visual Servoing System)
7\.  444 41 M4 #3
3.3.14 4# ^4- s.3-4 4^1 4# 13# 44 2 4444)7} 44. 4 #-9)
44)4 41344 31S4-  444 34s# zl^ 3.3.24- 14 4s. 4# #3#
#7)) 44- 4, #4 43(Bluired Image)# 4#4 44 444 4# &3 7) 5) (Focal
Length)*^ ## #44 44 41# 3# 4432# H4s &4 4444 3 4 It# 44
S7} 444. #4 ## 44444 44 #44 #s)14-# 3# #• t $14. 44 &#
4 444 3# 4 444 444^ 4 s# ## 44s# &4711 ## 44444 4
Is# 44 44# 4#S# 4#S4 #444 (15cm 4444# #4 #7}) 4##
4 zz.#.4.1444- 1# 444(Wire) 3# 444 4-9- 4 4444# 4414-4 &3
44(Focal Length)# 44s ¥s &## 44s#4 #44 444 4#44 #4
(0bject)4 47>7>47> #44444 #4 SI 4-44-4 &4 44# #4 44 4-4441
4 #44 44 4.S.4 4#44 4## 4=44-# 3:### 34ss IS. ti.44# t ##4 44 444# 444 #l(Fusion)l# 44 1S14-.
4.  444 4# 444 #4 (Fusion)
44 7D4 -S4 444# #44# 44=4 71)14# 41 #4 44 ##[13]-[15]444 7]#44 ^7)1 S.4 S!3 #(General) Multi-sensor System# 7}#S}4 47) 4
4 ^# #Sl #4#(Key issues)4 444 #4 #4.[15] ZL5)1 #41# # 447}
/@7)#4 3#S(Accuracy)7} #3#sx} 1# #5)1=4 44 1# 4 4#7|) 414 414
4# 14# 3 #7} 4# #41# 344. 4# #4, 44 44 4  #4# #44
## 7)5)41 44 4444 414 #S(Error distribution^} dl3.3.24 1# 3t, 4
# 444# 1444 444 4 444 41 s#l# 444 4s “Dynamic
Multi-Sensor Data Fusion System for Intelligent Robots"[15]44 4 1# 14 AS.
444# 141 3t #41 #1 ^KComputation load)7} 414S3. #4# 447}
7)4 #7}#1 344. ZL#3.3.34 14 # #44 43 4444 411 7}#4# 3
# #44 44 444# 1314 zz. 7}#4# #14 4441 #7)1 44 ## 4-8-1
4 34 ## #4, 447)4-7)611 ^4#(Sugeno)4 HI 1#(Simplified method)#
-128-

l-W! # 41 4144-4 tMJ4 4-^4-4-.
• 14 #14 44 ##
44 44 W  444 44 #1# 313.3.24- 44 44 4## 4^ 4
4. #, #44 4441 4Wx=- 443241 #444 44 44^4 #4 S 44-114-1 44. 4 ##4 44 #441 4414 41-44 1441(Rule table)# =n£ 3.3.44- 44-.
• #1 4 4444-
## 44^-5.# 3.3.54- 44 111-2-5. #4 ^4# 44-4(Mamdani)4mini## Aj-g-4-^ji, 4444- 4-4^ #711144(COG)# 4-g-i- # 1-2-4- 4 4
-f- 44 11 °1 ^-o] :g5l.Ejc. #7]] 3c.(Sugeno)4 4## 44 (Simplified method)#- A>
#S4. 14s. w4 dz# 4#7> 41444 # 44# 144 3:4# 44-.
• 5.4 14 (SIMULATION)
3.43.3.244 #44 5.44 ### 14 4-4-4 444 441 4 1
1 #44-1 324 444 42.44 +14- -14 144-tII #414 3l 3.3.6(a),(b)?} 1#1
444 -2-44-2 SI 41, 1 11 4°14-4 iM(fussion)4 14-1 3l3.3.6(c),(d)4- 4
4.(4, x## 14 4444, #14 1## cml442. x# ##4 15 cm# 41 St4
14 4444-.) ## 4441# 14 414 41 3:4-5., 1 444M1# - 41
4 41 3:4-5. 14 11 44 144 441 44 #11 -2.4- #5# 14 1# 1
t 14.
-129-
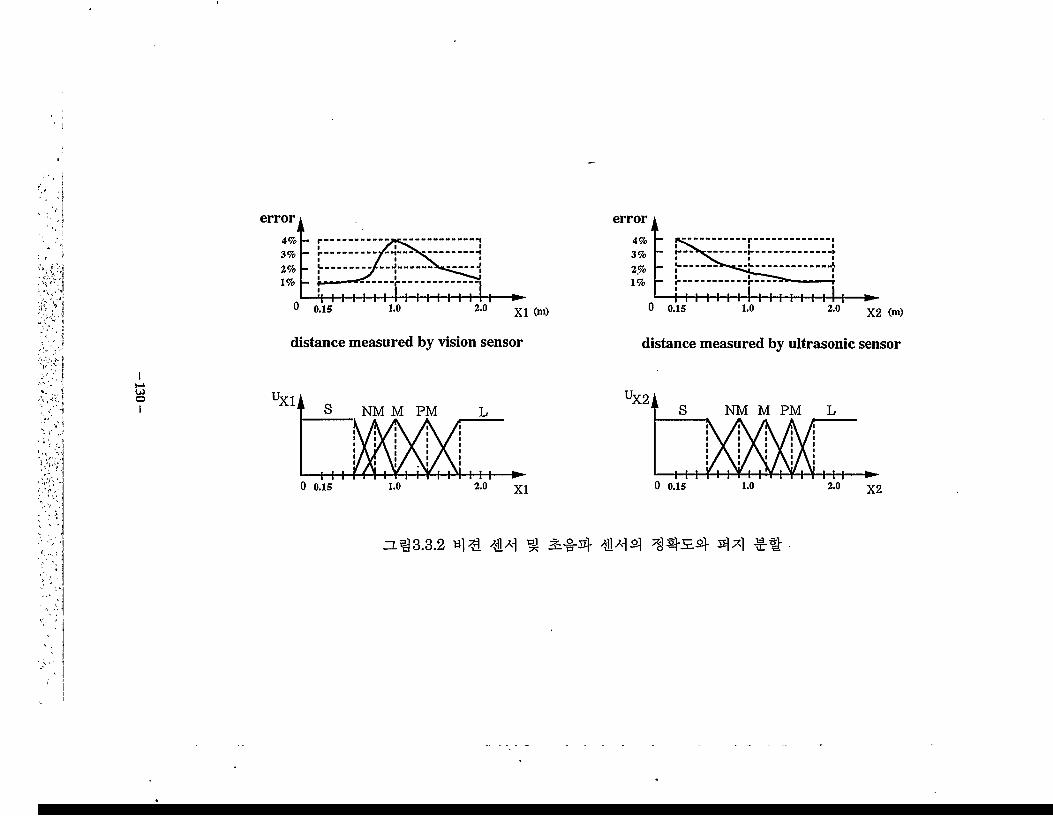
error J L
U 0.15 1.0 2.0 X1 (m)
distance measured by vision sensor
NM M PM
3.3.2 ti]^ 4*| ^
error
■f-l-IHH-l-l l-li-l I I I I |0 0.15 X2 (m)
distance measured by ultrasonic sensor
%X2NM M PM
^§-4 44# =3 #5.4 44 4#
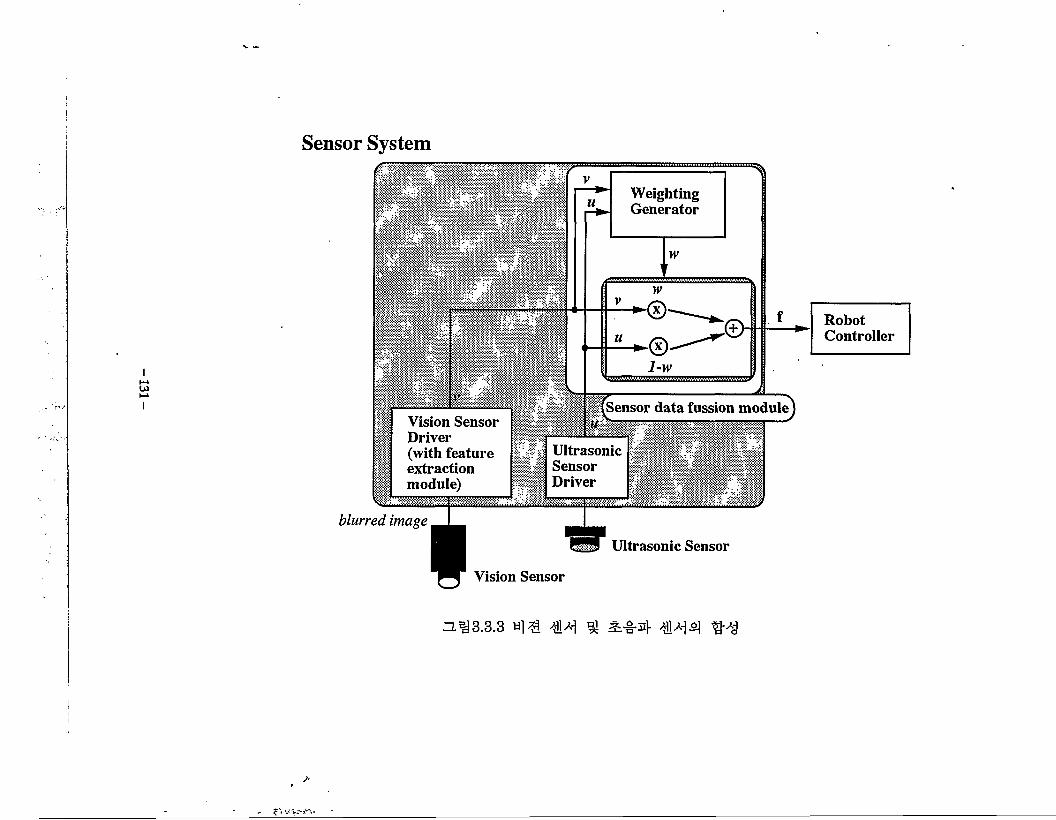
Sensor System
blurred image
Ultrasonic Sensor
Vision Sensor
RobotController
UltrasonicSensorDriver
WeightingGenerator
Vision Sensor Driver (with feature extraction module)
3.3.3
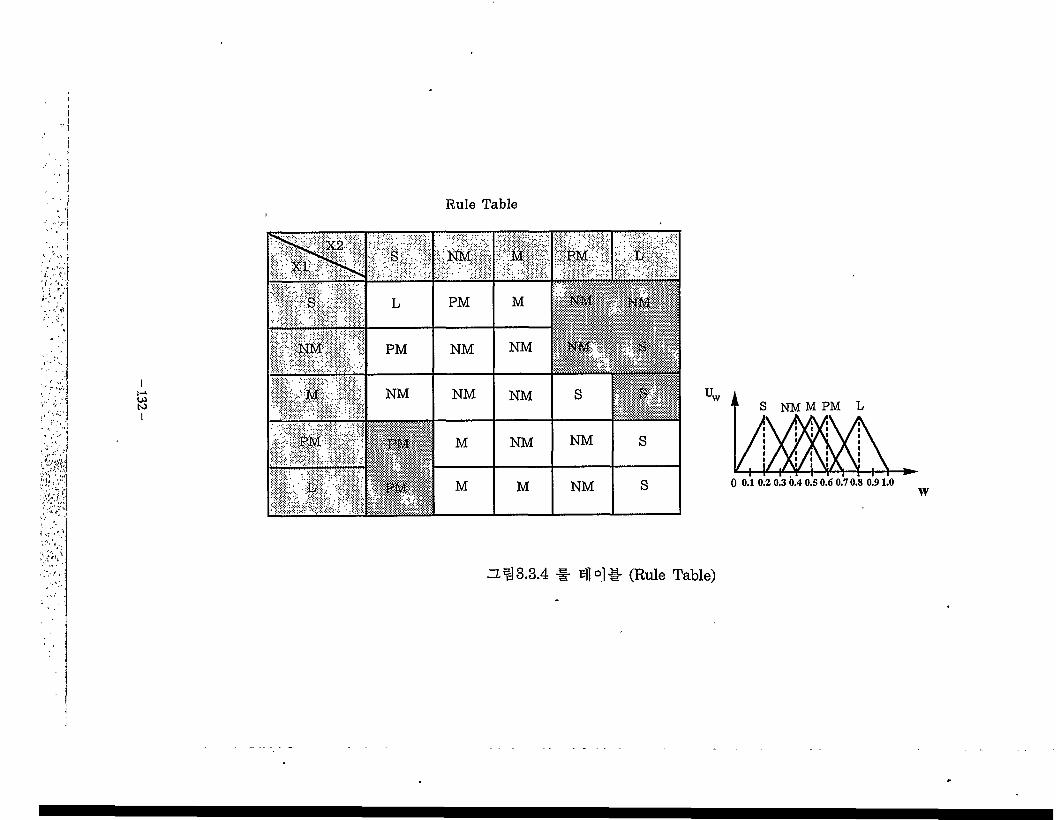
Rule Table
’>x'sXihX2
X3tSsss> S NM M PM L
S L PM M NM NM
NM PM NM NM NM 8
M NM NM NM S s
PM PM M NM NM S
L n M M NM S
S NM M PM L
n 13.3.4 # (Rule Table)
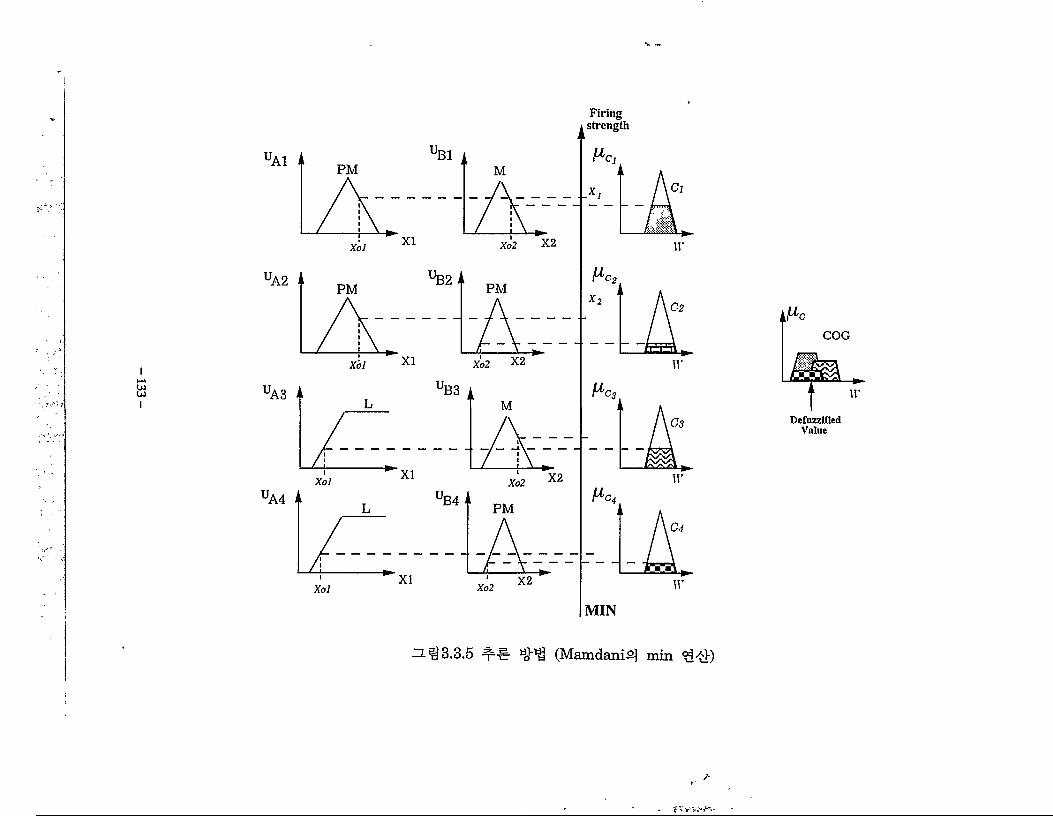
Firingstrength
COG
DefuzztflcdValue
3.3.5 t-E- (Mamdani-2] min <*!•<+)
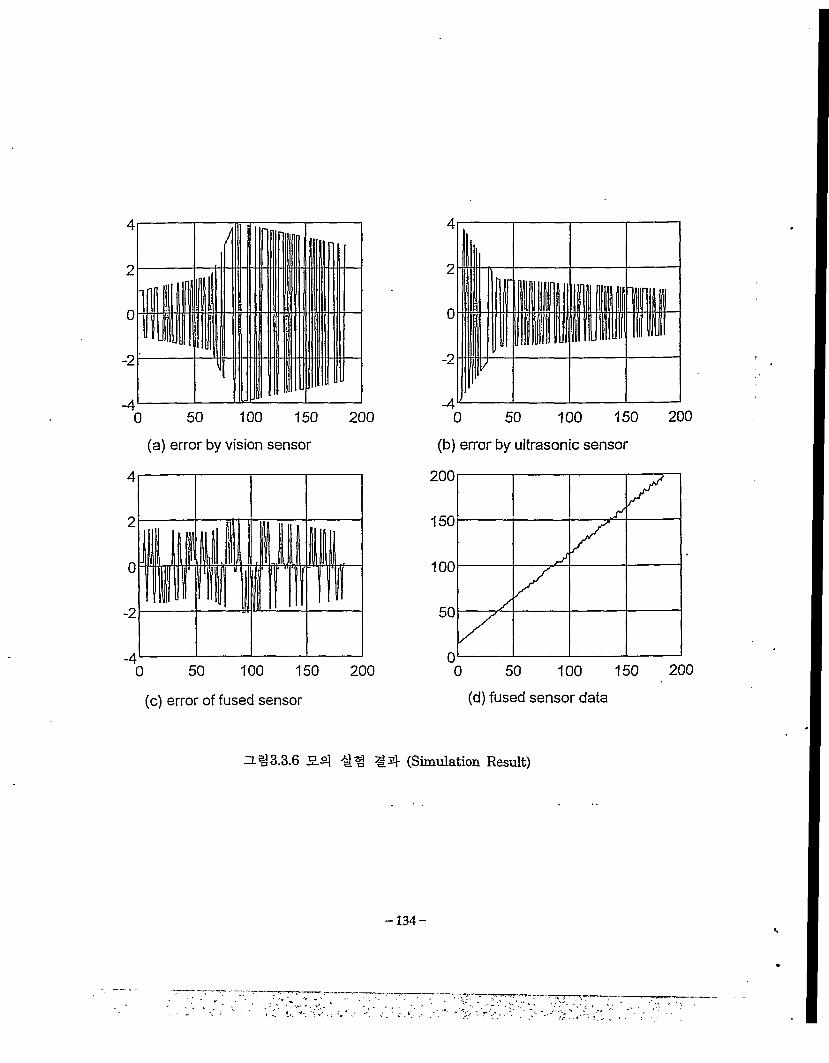
0 50 100 150 200
(a) error by vision sensor
0 50 100 150 200
(c) error of fused sensor
0 50 100 150 200
(b) error by ultrasonic sensor
0 50 100 150 200
(d) fused sensor data
3.3.6 5.2) 2§ iz}- (Simulation Result)
-134-
41 4 # 3i# <g>g-
4% %44 7}#%41 %*%# 4**4 «g4 44# 4*4% ** 4
*4 44 4*1 %4 ,%54# 44 % 4 (image acquisition), 44 -#4 *# 4 *#% 4
4 4% 0)4# 44 %425 4444 444 4444 *5# 7M2 44. 44%
44 444 44# 445# 4* 4# 44# 44 44 4^4 444 *2% #4
# 4#%%. # 444# 44 4444 *1*4# 44 444 #44 444 %%25
#4# 444:*-5. #4# * $1# %h4*1 4 5% 4 444 4*}52 4# 4444 44% f&4 44 44 %h4*1 -M414 2.4 44* 445-2 44 EPLD# 44% 44 44 4^H4 441 444 444 44%%.
4*425 %44 42 44 4** *1#%4 444# 44:5.2 4414 44 4
2# %41% 444 %%. 4*4# 55 44 14% 44 44 % 24% 44 44%
441441 %57l%4 %4=% 44 %4 44**1 ;H#4*1 %2 %#5 *4 45% 4
#52% 43: 44# %54% %% 4=4% % 4^4 43: 44# 44 #%%4 *1**1
425. 44 45) #4414 4*52-44^ %# *47> 2#%%% %4=% 44*4-
4 %4 4 *1=^71- 4452 424 4=4-% 5#%% %%25 *44 *1#-%% * %*H
%%. *, 44 44 45444 44=% *44 44 4S. *%4 %4*% * %# *
55 %7l-4 %4=% ** %%# 7>4*> %%# 4*1%.
*1 44*114 %# 44 5%5#- 44 42# A/D 444 2*44 44 42 4% 2#5 44 4*1%# %*%# %* 44*1%. *14% %* 44% #4% 44% % 44 54% 44 45 4425 *1# 44 *144 #%%2% 4# 4* 244% % %. 4444*5 44*1 %44# 444 %% 44 44 444£ # 44* 444 42 %* %5% 4%% 4%* % %*44 4*%27l- 4# 44 44 4544 4* %*, 4 %# 44 44 45%4 SM4 7>4 7l%*l 4# *2% 2544 %# 4* 44 44 4544 2*425 %%% 44 45# **# * %2# %# *#% ti>5 44 A/D 5*%7l 4**1%.
44 %4 %444 4*4# 7>*%4 #* 444*1% %% (raw image data)*
-135-

4# 4## iff 3144 &# 44 45# 4#42 $14. 4^711 314=4 7j5#5# 4 4A> 4^( decision making)# 497] 4314# 44 3144 €431494 44 4
431 45# 444 44 (image feature)#-#- -f#4:4-. °1 44# 44 44 9#94
2 44. 4 €314 44 444 444 444 €4 44 4445.44 4444 44
4=4 44 444#' 9#431 44 444 44: 44 €4 44# 4-444 444 42.
4 44:4 4455. 4444 44 44# 44 44. 4 444 44# 444 444
44 444 444# 4444 44 41 #41 #4 44 44 444 44# 444 54
44 31### 4-44-71] 4# 444 $14. 44 #4 9# €3131 $1# 44#4 7}#
31 #4 44# 544-# ### 4-5 44 44(pixel-level operation) 4 4. 31
9#4 44 44 44 #4, 424 €9€ 4441 314 31441 444 4-5 44 44
(pixel-level operation)4 444# 4 #4 #4 #44# 4 9 $l€. 444 #431
314 AMI 4 €#594 3144 #54 44# 4 9 $(#31 24# u}5 #5 44 4
4 44# #4# 44 431 44 44# #4#31 444 44# 444.
4314 444 44 44 4544 44 7>#31 44 45# 4442 #24## 4-53145 #44# 44# 44 #4# ##4# 45 444 44# 4# 5:4455 44431 44# 9 44. # 49-314# 44 454 #5 444 44# 5#455 444-71 4314 HAU(Hardwired Algorithm Unit)4 4# 7114# 544-27]- 44:
5# 7l#4 44 44 4# 4-5314# 44 44 #24#4 4-53145 9#4 4 47] 31 #31 #44 #431 31314 24=4 44 447} 7}## 4# 4#4314€ 5 4€45(application. oriented)s]4 $14 #444 444# # 444 $1#. #, 4# 4 4 44 444 44-315 431 4-5314 4544 4314- 94 44# 9*5314 44 31 #31 ## #3144 $14.
## 4#431 4 ^(application)4 43144 4# 43131 a-] €24## #53145 9W4# #7}## 444 $14 31 #31 4#4 2# 44 44 4-5314 454 7H# 4 4# #3144 $14. 4#31 4# ##44 #4 44-4 3I#455 4## 9 $1# 44 31 #5 2#4 552314-I- 4445(programmable device) EPLD(Erasab!e Programmable Logic Device)4 4#44. # 49314 57H4# HAU# 2# 31 #4
-136-
EPLD4 3#4 4134# 4 #44 5#4-es. 4 4441 ## #4 4 #aM44 #-
44144 #34 #4 ##711 % 4" $1# %## 414%%.
# 45414# 44% #41## 4^%%4 44-4 3#4 #J_ 44 =5.4144
DSP4- tflt| =3.344-8- 4-3414# 4#4-4 4-4% 4% 44 %34## 4-3414
3 #4t11 5%% 4 43# %334 A=34441 4% 4% 444- 434144 4%
4% 44# #%% 44# #433 %4-
3# 4% 44 4 ^#4 4-t- 4% 44# 4% 44 3#414 4#44t11 44-.
4% 44 3#41# 17H4 DSP4 4134,' =33^4# %3414(Soft-Hardware)?} #4 $14-. 4 3#414# 413441 #4 $1# 4% 434- =3344# 4-34114414 ^
#% 43# 4-8-4-4 4#44 4% 44# 5*3 %%. 4 3## #341 4-4-4 44
;H# %4 ## 4^ #41 #-%%4 #1 44 4^## 5%% 5 $14-.
1. 41% DSP #3444 ?H3
# #414# 44 7\A -8--8-41 #%%7ll 44% 5 $1# 3# 4% 44-8-4 DSP
%3314 5%4l 444 #44314-. #41% 43414 #3## DSP4 41 #3 =334
4# 43414 $1 FPLD(fieId programmable logic device)9#33 4#4# 4# 44
3#(image processing module)3 4#4 44-- 3%, 44"## 3444 VME BUS#4I
44 #^(realization)%4*. 4 3#414# 4# 4134(Image Memory)41 #4 $1# 4
# #3% 444#(HAU)44 5#% #3# 4-8-44 DSP?} 4##% 4# 44# 5
#%4-. 4 3## #341 44-4 44 ?H# #4 5# 4^(VME BUS)#4] #-444
W 44 43i## ^4 4= $14.
4% DSP 43444 CPU34# TI44 3# DSP=3414% TMS320C40# 4
#%4. 4# C4033 #4# 4 DSP# #4% 4# =3414 #3 4% 4## ?}43
$14. 27114 %#4 ###% 32434 43# 7}#3 $144 44 #44 25-44 4#
434# 441 ^(access)% 5 $14. 3#4 444 44 4 ### 444 VME BUS
% 4 414 ^(interface) ### VME43 #414 C404 4—13 4134 (system memory)#
-137-
43]5 # $># 444 ft# 55 tifl54"5"(Dual Port Memory Bank)# 4 #44
C40# VME4 44 44^7> 71-4# 444.# 4^4 7>4* 4444 ### 555 sH 4# 454114 44 - HAU - 4 4#
5# 551151144 54 444programmable logic device)# Flex EPF811884
5# 4551# 444-4 44-4 44# 44# 4# 44 4 #5 4 #4 #4. 55544
# 4-54114 ##4 RAM4-#4 55544# 54 4-541]44 5# SRAM55 ##4
#7] nil#4 7l#4 44- 4s] 4^W44 ^554114455 t*344 4##4 to
4### 4-5.445 ^(realization)# ^ ## 444- 5# §>541145 ### to
4## ### 41554114 4455 #711 #4 4 7>#455 44 ## #44 #44
44 5#4 44# t to# «fl#4. #31# DSP 4541144 #31 #5# 5=] 4.1#
#4.
-138-
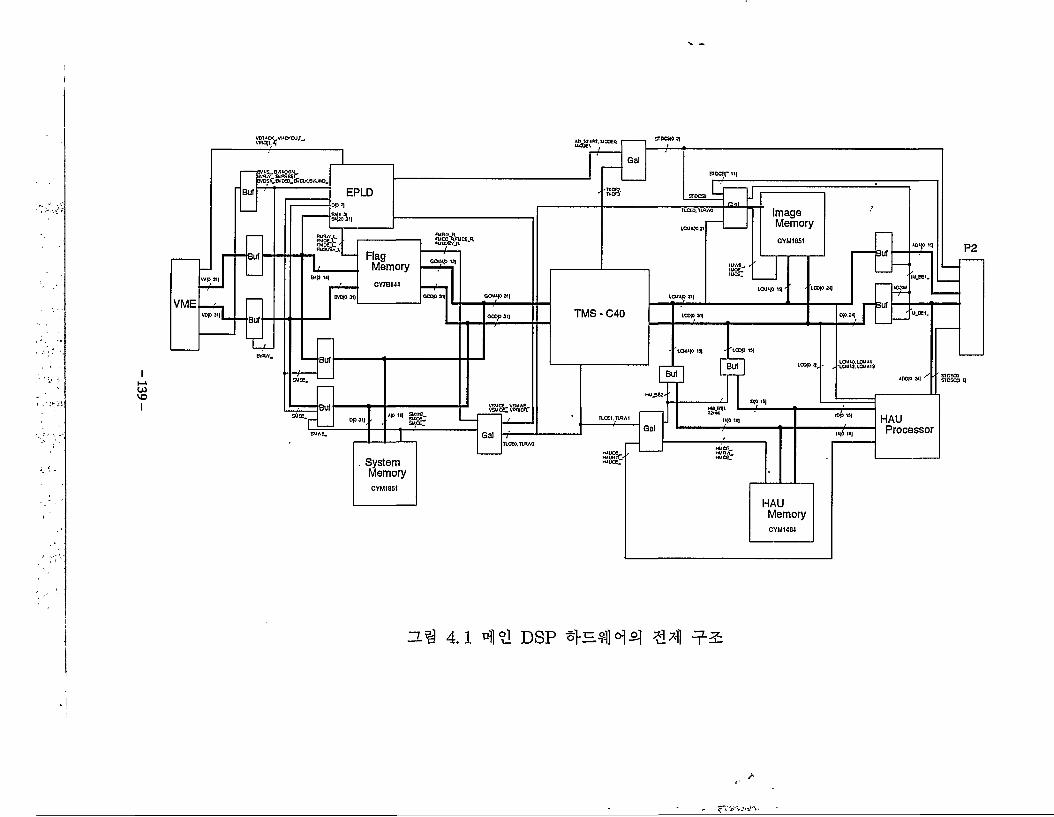
&I
4i ^iy dsp 9-=
. 1
z

2. TMS320C404 ^
44*1# DSP 4^.4144 A]#4 DSP^y TMS320C404 #44] #4
44&314.(1) TMS320C40.fi] DSP CPU# 275 MOPSCMillions of Operation Per Second)
4 #4 444 44 320 MbytVsecfi] 444 ## #4# 7^2 $14.
(2) Global^- Locals. #4# #7# #44 4# 4^(bus)# 7^2 $10.4, 44- 32 ti]H(bit) 4 44(data) 4^4 31 45 45Bi)^(address) 45:#
7>7]jl $14. 4 # 16-Gbyte fi] ^?1|± 44# 4# #4- o] 45: 4^=4# 4
JL 100 Mbytesecfi] -##4 4^44.
(3) 512-bytefi] 4 ^(instruction cache)4 8-Kbyte-fi] single-cycle dual access
RAM# ifl4431 $14. 5# 4# 16-Kbytefi] ROM41# Boot Loader =SZLH
4- iH44-31 $14, 444 444 #5 A]#5z# 4^44.
(4) ^1444 44# #4 4## 41 Wb 67114 =541*14(interprocessor)
#4 55# 71-431 $14 TMS320C4044 #44 -8-44-4. 4 #4 55# 4
5 20 Mbytg/sec 4 #7l (asynchronous) 4# 4 7}#44-
(5) 67H^ DMA 55 ##7l(coprocessor)# 414431 $14, 4#44 CPU #4
4 #4 #40] 7>#44.
3. DSP 4-54114 4 VME PC Host #4445:
314 ## 44# 4# 44 4-8-4 #444^(user interface) 4 44
SL55(supervisory host)## VME PC4 44 7H4 DSP7} ifl44. 44 44 S#5
4#4431, 4 VME PC4 DSP 5#4fi] #4445# 5#4# #44-71 44 n#
4.24 4# multi-cpu, multi-memory #55 ### # $14. 4 5#4 TMS320C40
(DSP chip)## VME PCS #4 4#S5(download) #5 444
TMS320C40# 4#55g =SZL^# 7>7]31 #4 444# t44-2-5 4444 *}#
7>7> 44 4# n 44# VME PC# #4 AH-7>d)i7ll #4 # # $14.
—140 —
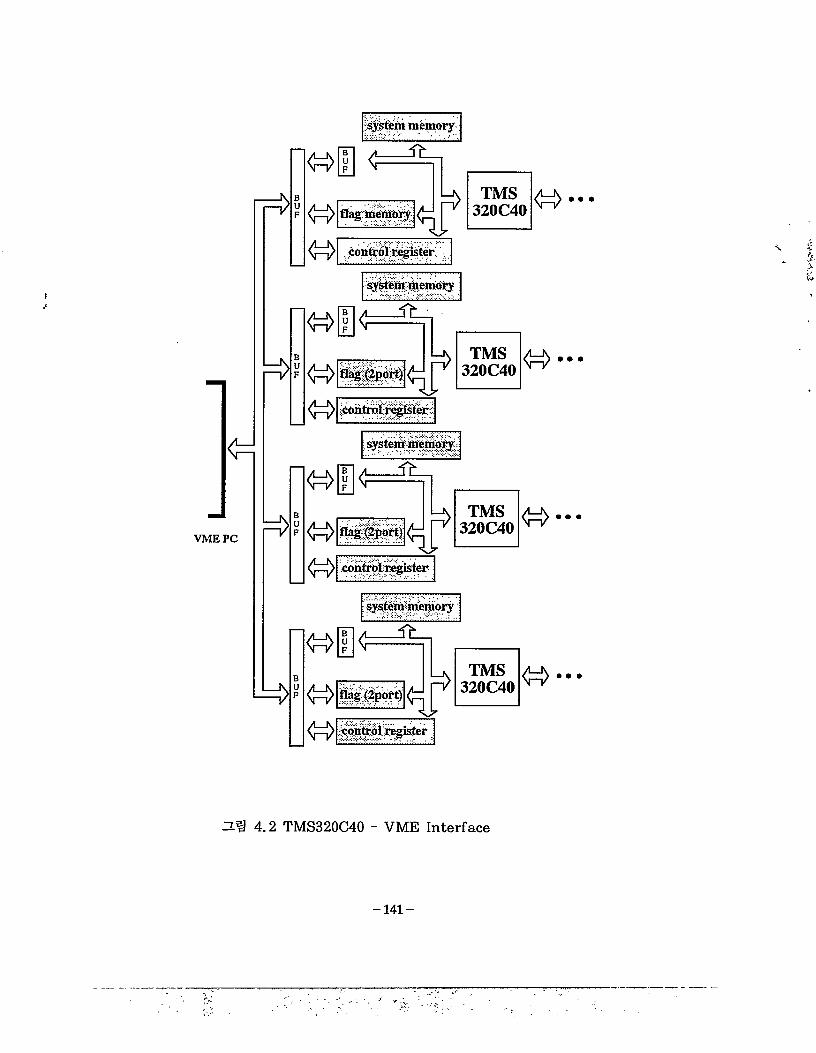
BUF
BUF
BUF
BUF
flag: memory
TMS320C40
TMS320C40
TMS320C40
TMS320C40
3% 4.2 TMS320C40 - VME Interface
-141-

VME PC# 4 2### 2## stage-1 44# t $124, 44 4
# 4—^ 4] 22], #5]] 2 till2.B](flag memory) 2# 42# 44—4(control register)
# ## 44]2# T $14-
4-4-4 4## fsjl^ =14 4^H 4244 4-t- 512KX32 BIT 2.7]2 CYM1464 SRAM4 CYM1851 SRAMS. f444, VME PC2 #4 4#22 ## 2 22*3# 44-4-fe 4## 4-4, #2# 44- 44- 4 25] 294 4#444# 42
(dump) #4- 4 $14.
#412 D|]25]4 4-t- 8KX32 BIT 27]2 2-PORT SRAM# CY7B1442 9^44
#24 VME PC4- TMS320C404 #4 4# 4## 44- 51142444-f VME PC2 94 222^4- 4422 44 4 TMS320C40# 5] ^(reset)#T=H 4 #4 DSP7> 7>4] 522|f 4^44# 4## -#4. VME44 9 4125] 42412#2 4.1 4 44 #434 $14.
System Memory B000 0000 - B01F FFFFFlag Memory B020 0000 - B02F FFFFC40 RESET OFF B03X XXOOC40 RESET ON B03X XX04A/D START B03X XX08A/D STOP B03X XXOOMODEO START B03X XX10MODEO STOP B03X XX14MODE1 START B03X XX18MODE1 STOP B03X XX1C
2 4.1 VME 425] 42^1^ ^2
44 44 VME PC7> 444 4 25] 4 #2# ell 4 23# 44]2 4# ## DSP
^$1 TMS320C404 4# 4125]# 442 #4# 4^44 ##4 #7>4# 444. 4
4# ### #42 2422 #44# DSPS] ### #44 4«H4# 44# $1444
2 24# 9-4444 #4.
-142-
• -

4. TMS320C40 DSP# #25l£#
## A) 2^# 2#(analog module)# #<2# TMS320C40# LOCALS#
# 9&^ ZZ.B) 4.3# ##. ad_start 413:1- ## 4teZL 2## A/D ### <3# #
### #2.2141 ##§H ^2# (AH-#7> ## #) A]^ #5.51# ##ZL #
251# safe ### <3# #*M# ^2(dump)# ^ $)2# #### Al#
#fe 7lwl 4^##-# ^2# TMS320C40# t-fl### #2## ^ #fe 9&2 5|# $1
#. 2# <3# #25l# # 2### 512K x 32bit 2#2 #25) CYM1464# 1024K
X32bit H7l# #251 ti CYM18512 9^ €4. #b1# #^^(sequence)# 2##7] #
# OT #25l 2#4- GAL22V10 ^# 22ZL^ ## 2## #25) ##
—7]- 71-wl" ^##.
5. HAU(Hardware Algorithm Unit)
# Aj^i^j^l ##$] HLAU(hardware algorithm unit)# ### ul#
#25l ^(vision algorithm)## #4)# #2### # # $%# ### ####. ###
OT ## ### #2## ### 2^## 222### #2##2 ### #2
2 ### 222# #22 #2# ## 7fl## (reconfiguration)# 4= 5U2, 2##
SRAM, TMS320C40# 1#^22 ### # $1# ### ## ## #2###
2#4§# ### # $143(portability)# ###22 &##. ### HAU#fe ## <3#
22##, #222#, ##*3 ## #-# ##% #4 ### #251### #-2##^2
2 ### 9 $1#. HAUfe &# fe5l 2A>#. 29-5)22 #2# ALTERA
A>7> 48##fe FLEX8000 ^2 ## EPF81188# A)##-# 9#^#-. FLEX8000#
EPLD(electrical programmable logic device)#- FPGA(field programmable gate array)
£] 4H3# ^^Al PLD2A) high performance, predictable timing, ease of use,
register intensive, low stand-by power, in-circuit reconfigurable ##- ## -§H1# ~$k
—143 —

• • •
# # e
TMS320C40
TMS320C40
TMS320C40
TMS320C40
3Z.fi 4.3 Structure of Local Part
-i IMAGE DATA
—144 —

3M HAU4 #4 5# 3^ 4.44 44- <3# #4# H711 2^-g-o.S. 4#
4= $14. 0) #4 4## 3X3 ^*3#4 W43 ^ «l*i] #% #34## #.E.^4# # # ## EPF811883. HAU 4 4- 3x3 ##M# 2x>€
##4 #4# ###7] 4 £4 4 ^ 44. 4 #4# HAUs. 4s. #47M4 <H=s
5114^4# 444 HAU4 #47>7fl 44. 444 #4M <3# 44 I# 3x3 4W
44- #*3## 4 7M #33. convolver TMC22554 convolver 3##4 FIFO
42.4# 7M4 HAU EPF8118841 #4 2.711 4# #23. 3 ### HAU memoryo]]
4444. 3#44 3^-4 44 444#433 4434 444 ## FIFO 43.41-
44711 44 convolver 3##4 44# FIFO 4344 37]# 640(=512+64+64)byte3
CY7C4204 CY7C4093 4^44- Convolver 4414 44# FIFO 434 2.4#
8K+4K+512 bytes. CY7C460, CY7C4324 CY7C42023 4^44- 44 44 HAU#
21 7]-4 44 44 #34#4 #341145. 4## # #4 ##4 4# 444# 3#
as 44## #4.
-145-
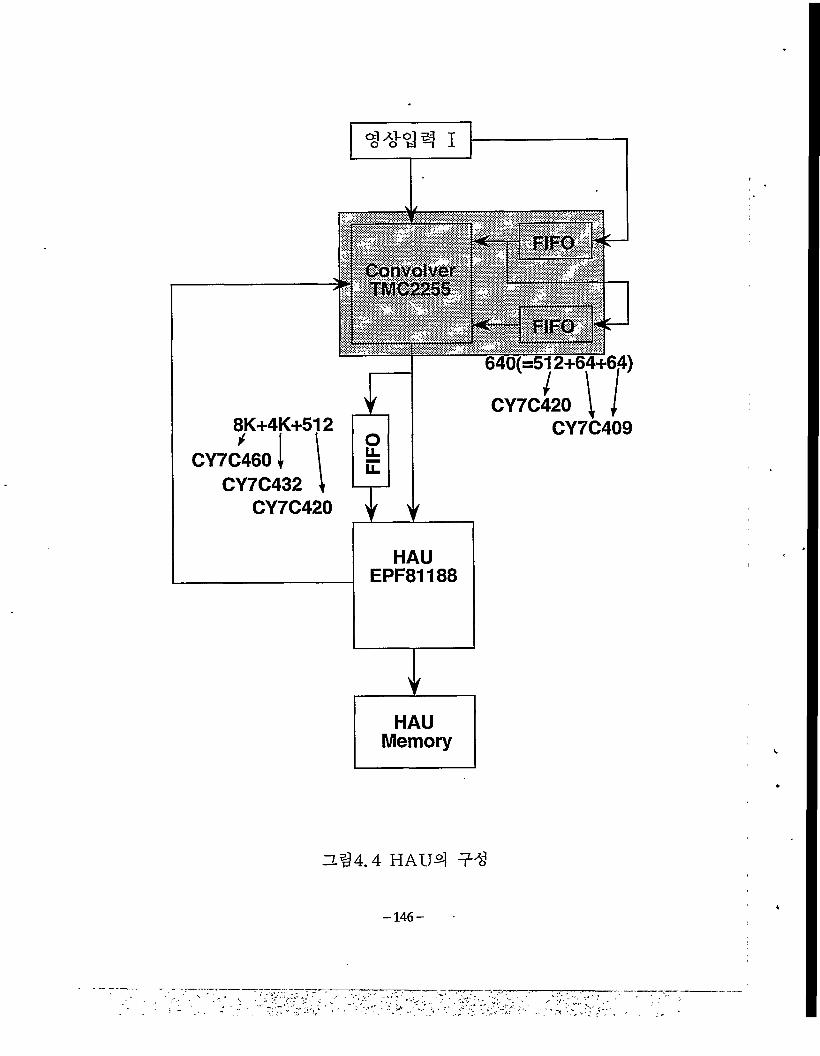
640(=512+64+64)
CY7C4208K+4K+512 CY7C409
CY7C460CY7C432 \
CY7C420
HAUEPF81188
HAUMemory
3^4.4 HAIM
-146-
2imn M5| 3^# 0[#ff 7\E\9\
&## 444 7l###l fe4 l## #^25. l#4 4#4 4t#
4 4*114 zis. 4# ##-& 444# 44- #4, #41 l#414 ##25. 44#
4=4 #5]7} ^#4# ^7}7}1L a#7]#7} 4##25. 44 #4=4 #4 #4 45
#4. 444 ## % 7Hjl ### 44# # ##41 441 # 4#444
7144 a### 4t444 ##4 4 7}#s. 444. 444 4444- 7M12. 4#7> &### 4441 $11# W441 44 4 4447] 4#4. 444 4 4444^- &4-
4 #44lzi 45.4 #444 4# 44-44 S-4 444-2. 4444 44 #2# ##
42.7} 44.
4#4 44 444 444 4*1141 &## 441- 44-44 444 4114 4
4 #44 44241 2:4-44 41444 7}#- 7>44r 11444 #41- #444 4
4. 444 #44 ### # 4= 1 ^44 2# 44 7^4 &4 s=# 1144 2l
4441 #14 3:4425. 4#! 4= 44.
4 #1441 40cm#44 44441 4444 te-i- 4 444  ##2
7}^4 4#4 #4 4#4 #4# 4142 44 #21 &## 44 2?m 4-§-44
##-4 viewport# 7>^4 #7] z]#z| 4 #4 viewport414 ##4 4-14 444&
##44 44. 4-B-l 44 ##-& 44  444 ### 4444.
-147-
I’Kh
5'KnilW
W
W
0-1Up
3
0-1
w
wTW
%?minimln°4=3°
JpT'5"rj-v
53p
op atrn
MK•Kir
nTK
WW
r\
mliuo' up
Hi“' C 01ioJ °10<4° Op
o' 7® m|iitf *ru|m np
W
w »
£ <i-
3$& mini7P nT op ^
If J■Kir «io
*!tPT ^11 $
nr nr nr dr flh *
^io nr<p <Pt\ ■ppn
T W^iofr■g"
$mop
n° opn- ml
l K< nm
n°Kirnr nrnr I
o’-! nonrwnr-J «P
IjoJo
op mp'5™ nr
mpup
nr nru[m o
-ipT i>lW TT-lDp IkW T—1
ul-l4
dr dr
nr0nrup
#-)
dr
ml
minWW
1wil
M
iio<jm
TTioW
w
'o’%=m|nTW
'fvT
1
$w
op
<1TTW
tOp■til
Jpn*
Kh
#4>
mlTW
o-JW
3nr
>KlrnTK$•->ojo
mpnrup
m|mmln°
m]mnrWWop'K4
Tupnr
nrK
*i4)
mpnrup
£lio
opW
n°■KirnrK
T
nrnrup
3
KP
dr
ml
o]m"R<
I7?■KirnrK
o-Jnr
S
O
1
drnr
115°
£
oudr
ST#n
I<T
M
ml
o]mn<
#o*
<1~
Ijpl*TW
'Kir
drn*3jo
<h
TC^ni
nrTw
mlr
£
i3
I
I
#3% M
[1] Jorge L.C. Sanz," Advances in Machine Vision," Springer-Verlag Inc. ,
1989
[2] Y.C. Kim and J.K. Aggarwal," Positioning three dimensional objects
using stereo images," IEEE J. Robotics Automat., vol RA-3, no. 6,
pp 361-373, Aug. 1987
[3] T. D. Williams, "Depth from Camera Motion ' in Real World Scene,"
IEEE Trans. PAMI, vol. PAMI-2, no. 6, pp. 511-516, Dec. 1980.
[4] A.P.Pentland,"A new sense for depth of field," IEEE Trans. PAMI,
vol. PAMI-9,no. 4, pp. 523-531, July 1987.
[5] J. Cardillo and M.A.Sid-Ahmed," 3-D position sensing using a passive
monocular vision system", IEEE Trans. PAMI, vol. 13, no. 8, Aug. 1991.
[6] S.H. Lai, C. Fu and S. Chang, "A generalized depth estimation
algorithm with a single image," IEEE Trans PAMI, vol. 14, no. 4, April
1992.
[7] °] -&4=, 4Journal of KITE, vol 29-B, pp. 40-49, Feb. 1992.
[8] David Vernon,"A system for robot manipulation of electrical wires using
vision," Robotica, vol. 8, pp. 47-60, 1990.
[9] F. C. Glazer, 'Fiber identification in microscopy by ridge detection and
grouping", Proc. IEEE workshop on Application of computer vision,
pp. 205-212, 1992.
[10] E.R. DAVIES, "Machine Vision:Theory, Algorithm, Practicalities",pp. 44,
academic press, 1990
[11] J. Weng, P. cohen, M. Hemiou, "Camera Calibration with distortion
Models and Accuracy Evaluation", IEEE Trans PAMI, vol.14, No. 10,
-149-
October 1992
[12] R.Y. Tsai,"A versatile camera calibration technique for high accuracy 3D
machine vision metrology using off-the-shelf TV cameras and lenses," IEEE
J. Robotics Automat., vol.RA-3, no.4, pp. 323-344, Aug. 1987.
[13] S.Y. Harmon, G.L. Bianchini and B.E.Pinz, "Sensor data fusion through a
distributed blackboard", Proc. IEEE Int. Conf. on Robotics and Automation,
pp. 1449-1454, 1986
[14] M.Y. Chem, "An efficient scheme for monitoring sensory conditions in
robot systems", Proc. IEEE Int. Conf. on Robotics & Automation,
pp. 298-304, 1984
[15] R.C. Luo, M.H. Lin and R.S. Scheip, "“Dynamic Multi-Sensor Data Fusion
System for Intelligent Robots" IEEE 1988
-150-
I)-&UlMl
1
iitK1
Jjrti iu|o _o
-$i °lcilo!- r$i
-& A
r&B oii r’oji A
JSLj|6A
#lU|o.2,jJiu
Ij|wr°k-&
■jJ*ojdoi-.2,
rtr IAA4*A
Al>AAMt>111
* (1$A [il46oa I
#4>(uia
i
A «1>
-|> JE
r$i (At jp- D$a
nib_b
A.2,_h.I>AJ2nb
: h- je
If
iA J°fc i>A N Jo, A
a, |
II*W —A id, mi>
nl
^ ^ ^Hu A [t!$X6 -U (l|o
nr «£A Hu* A
iu[n
4% _D " AA A
&JE ulH4-J
1
aAN4J
oldAar$i(12-
4Jiu|iu
4>A
A Hu J3L A ^
A nib ojd
a a je I* f -£A (\° A Je a oir
naofriJflLJ?i
*je
A#
ni|m42r$i
#4°A>ojfl£
IJ[dAJ24dAflSjLJhA«#o]iinio
tf *
A H% ft A r^ & A A Hu A^ A ol-j JE
46o£46 A 4H A■fc #tb4> AoM 4>jot.i#4or5-
Ar|roftp* rS
4uODA
II
£ >d
(Alt£-U
iu$J£JjdJhl*ti£■Sa
o*
om
sJOnik
£
£2.Hoom
_>l>DiS
£roll
raHJ
42^
1. 4* s.5-
5 #54 ^5* 2?M #444 5* 44* 44* PWS(Power
Wheeled Steering)M# 4*%4- 4 M# 45*4 WMR(Wheeled Mobile
Robot)*!! 4*4* My till 27# 5* 447} 44- 554 4 a 4! 5442,
4444 4-457]- 5^455. 414 7}5% 454 4%% 4^134 #%4. 4
M* 4*44 554 44444 4-4# # 444- 444444 454# 4
444 7>54h.s. 4# 55*11 44) 444 44- 44-4 #44 54#54 ¥
y 27# 55445 5# ^ 54* 44 4# 5544 441 4:45 44 17#
4 55ti>4(caster)7> 4444. 5414 7## 7>^3L 55% #54#
(ahmainum)* 4*4*4 44 ## 554 #71] *115 44# 444, 4*4 rack,
544 DC motor# 4*% 5* 44, 244 5# 44(caster)7> #-#44.
2. 7154
7154 4 *44# #54*4 4*4* ^(parameter)#* 4*4 #4-
b : Displacement from each of the driving wheels to the axis of
center
d : Displacement from point P0 to the mass center of the
mobile robot, which is assumed to be on the axis of center
r : Radius of the driving wheels
c : Constant equal to
mc : Mass of the mobile robot without the driving wheels and
-152-
the rotors of the motors
mw : Mass of each driving wheel plus the rotor of its motor
Ic : Moment of intertia of the mobile robot without the driving
wheels and the rotors of the motors about a vertical axis through
the intersection of the axis of center with the driving wheel axis
Iw : Moment of intertia of each driving wheel and the motor
rotor about the wheel axis
Im : Moment of intertia of each driving wheel and the motor
rotor about a wheel diameter
=rs\3. 719-3M4- -fKE^-71 4# Mie 4f-4 44-
v : Velocity of mobile robot center point
(0 : Angular velocity of mobile robot center point
Xi : Current position of ^-direction
x2 : Current position of ^-direction
<j> : Angle between the absolute JV-axis and the forward direction of
mobile robot
coi : Angular velocity of right wheel
(oz : Angular velocity of left wheel
3-14- #2:44 4 #4(block)4 7lf4& 4^-5. 4444 4
4-4 44.
-153-
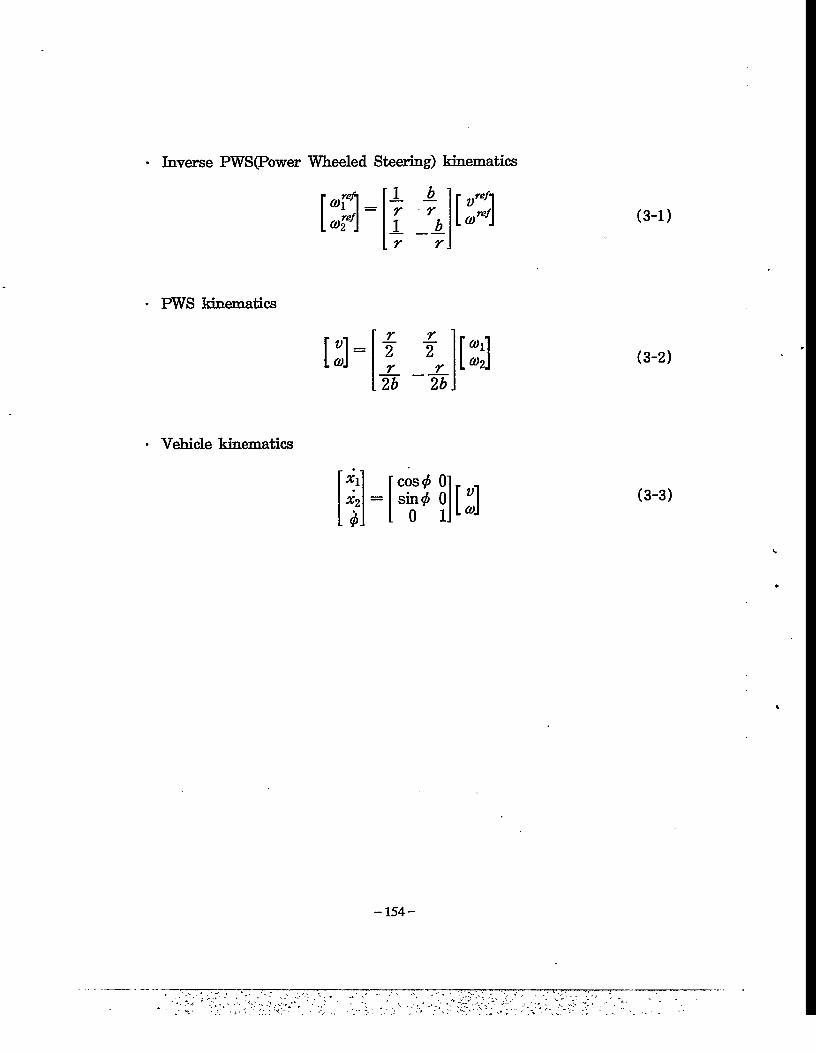
Inverse PWS(Power Wheeled Steering) kinematics
(3-1)
• PWS kinematics
(3-2)
• Vehicle kinematics
Xi cos ^ 0Xz sin (j> 0
. 0 1.(3-3)
-154-
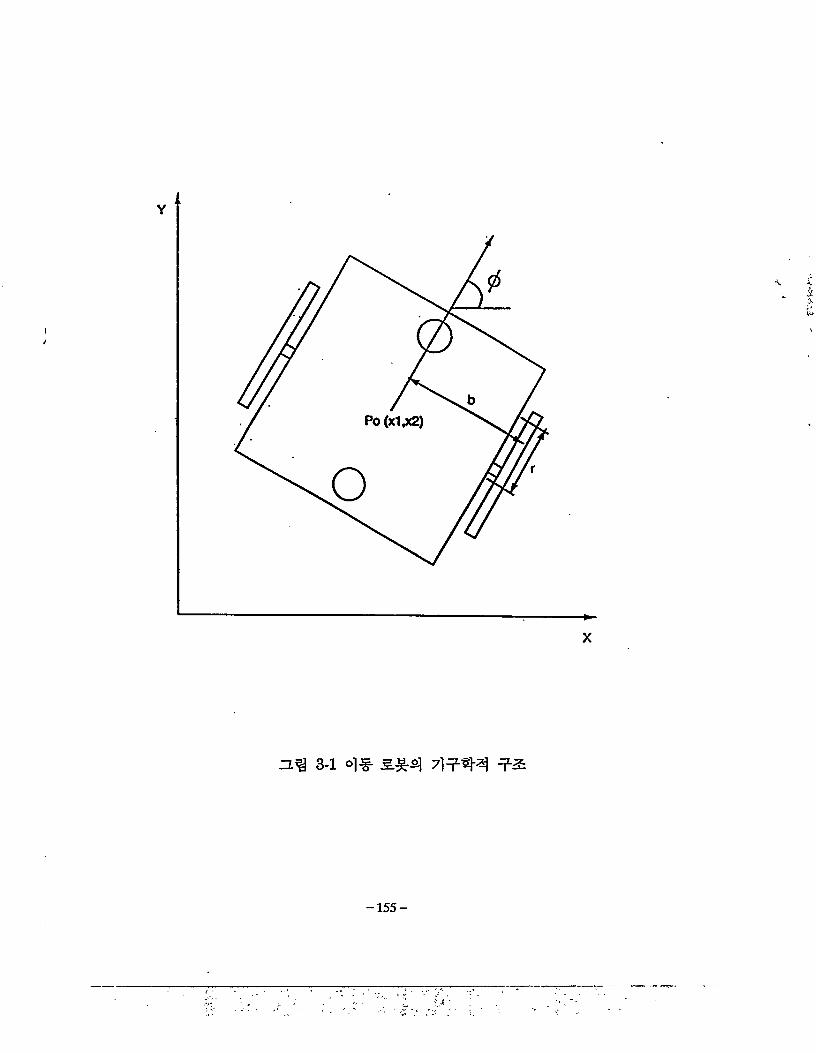
0
=L% 3-1
-155-
3. #44
#444* #E47l 44 4#4 7M4- 44-
• 5.## 54 (rigid body)5.4 $4.
• 3.#* 2*H1 ^44444
• 5.^gr 4*4 5# 271-7]S] kinematic constraints# 7|*14-
- no slipping condition
- pure rolling condition
7\. Kinematic constraints and constraint force
414^ 7}523.#E] 444 5# constraint -equation 4 #2.44. ,
• no slipping condition
«M4 4444 5 #4 44 44554 #5. 5## 0(zero)44.
x2cos<i>—^*isin^ = 0 (3-4)
• pure rolling condition
444 4444 4#4444 #2 0(zero)44
XiCos$+x2sm$+b$= rd\ (3-5)
XiCos<}>-\- x2sm<j>—b$= rd2 (3-6)
4(3-5)414 4(3-6)# «fl ^ 4444 4*4 #4.
2b<f>=r{Bi— 62) (3-7)
&7]^(initial condition)# 454 5442. 4*44" 4*4 5# holonomic
equation# 4*4-
4> = cC'Sf— 02) (3-8)
-156-

Nonholonomic equation-6: 4-#-4 #4.
XiCos<j}+x2sm.<l)= cb{ 81 + 02) (3-10)
°] 4—5.-T-4 4-§-4 constraint equation *1 ^4 414-
• constraint equation
A(q)q= 0 (3-11)
444
A(q) = f au «i2 «i3 «i4] = f -sin?5 cos$5 0 01 [ ti2i O22 <223 <224j L ~ COS $ ~ sin$6 cZ> c6j
tf'isin 0—.Y2 cos 0 = 0 (3-9)
*1*2*1#2.
4* Dynamic equation
4^3.3r8r 2*}€ 44 7H5]E5. 34 444^ 04
4. e^-444* M 4-B-4 w.
iT= y m{ xf+x2) + mccd{ Bx — <92)(i2 cos <j>—xx sin 0) + y /„( <9f + 02) + y J®(
444w— »zc+2#2iy
/= 7c+2»zto62 +2/m
-157-

41f Lagrangian equation^] 4
(3-14)~(4-17)4] o] t^Tfl ^4.
Ti~a^ ~a^2 (3"13)
<$7]*\i : 1, ••*, 4
A : Lagrange multiplier
9,- : generalized coordinate
z : generalized force
Oy- : from the constraint equation
^7H,
—m,d{ (6sin(6+ 02cos (5) == Aisin0+/l2cos $£ (3-14)
w%2-t-w^( $cos 0 — 02sin0) =—AiCOS^+A2sin^ (3-15)
mccd(.xzc<ys<i>—iisin0) + (4+-O$i — 4$2= c6A2 (3-16)
—WcCC?( x2 cos<f>—Xi sin <£) —I2CB i + (/2 +/J^2= t2—cbA2 (3-17)
r1? r2 : torques acting on the two wheels
-158-
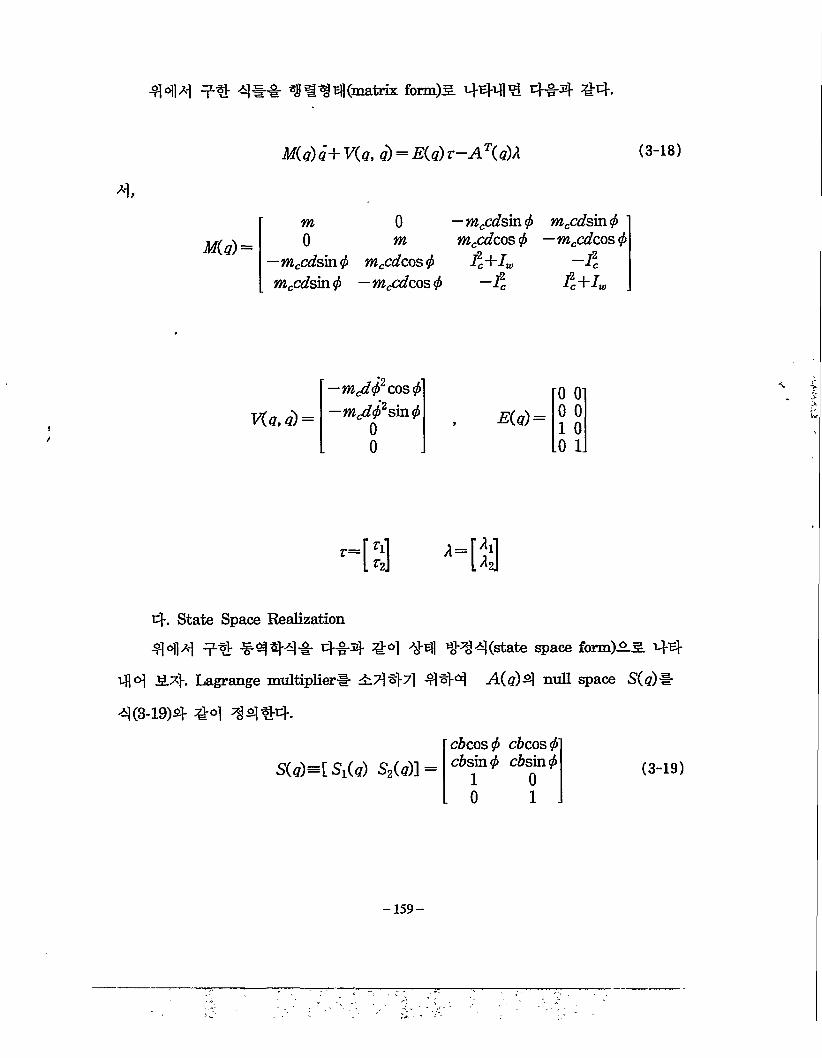
444 4#& ^l^BflCmatrix fonn)5. 444 ^ 4?4 #4.
4,
M^d'+VC#, o) = E(q) r—AT(q)/{ (3-18)
M(q) =m 0 —mccdsin.<j)0 m mccdcos 4>
—mccdsva. <j> mccdcos $ I2C+IW mccdsm $ —mccdcos<f> —I2C
mccdsm<f> —mccdcos $
-IIz+i. .
V(q,q) =
—mcd<j>2 cos (]> —mtd$‘svo.$
0 , #w=[0 01 0 0 1 0
0 .0 1.
r=
4* State Space Realization
444 (state space form)^-5. 44
44 Lagrange multiplier# rL?147l 41 #4 A(#)4 null space S(<?)#
4(3-19)4 jk°]
5(^)=[51(<?) S2(<?)] =cbcos <j> cbcos (6 cbsm<j> cbsm<j}
1 00 1 .
(3-19)
-159-

5(9)4 ^(column)-B- A(q)Q null space °14. °1 4 ^4(g)S(g) = 04
4- S"4 constraint ecpiationAS-^-B] A(q)q= 0°]H.S. 9# A(g)4 null space
4 # 4= 444 4#4 #4.
q^span{Si(q), S2(q)}
444 4#4# 4#4# smooth vector 7= [ft ft] T7\ #4%4.
q= S(q)q
q=S(q)y+S(q)y
9# #45-4, 9= d=[^52]Te>l €4. 4(4-15)oll ST(q)W: #44
ST(q)AT(q) = 0 , ST(q)E(q) = I2x2°)E.3, 4#4 #4 471144.
ST(q)M(q) q+ST(q) V(q,q) = ST(q)E(q)r= r
47] 4 9= 5(9) 9+5(9) 96l5.5.
St(9)M8){5(9) 9+ 5(9) 9}+5^(9) Kft q)=T
9# 44471 444 44 4"r(state variable)0)! 9# #7}44
■ft' ftft ftft 01
ft 02
ft 9i.ft. .%.
43# 4444=# 444 3.^-4 #444# 444445.5 444
-160-
'u.-.:*c5T T-V
-W-j^vi'jui- - ‘ ". 'X
i-
(3-20)
(3-21)
(3-22)
54 4

44 #3. 444 2.# term-6: *44 4# 4 4.
x=f(x)+g(x)T
4 4,
X*) = [_( Sy_(S% _1(5rM5y+5rV)J
(3-23)
^ [(5rMS)-1]
444 4 44- 44:4) S-4 444 44.
SJMS= mc2b2 +I2C+IW mc2b2 —I2 mc2b2 —I2 mc2b2 +ll+/,c 1 -‘uij
(3-24)
(3_25)L dz{di—d2)\
444 #^ #44 44 44444, #4 #44 4# 5.# #44 #4 4 #4 44 44 W7> #444.
(l) ^=04 44
#4 #44 4# s.#4 #44 #47> 44 4# s.#4 #44-43 4^
^47> 44. (444 #44 0g (94 4# 444 4-6-4-33. 44(positon)4 4
44A #444. #4# 444 4 7l)4 #b|]s.#4 ^4 #4144.)
—161 —
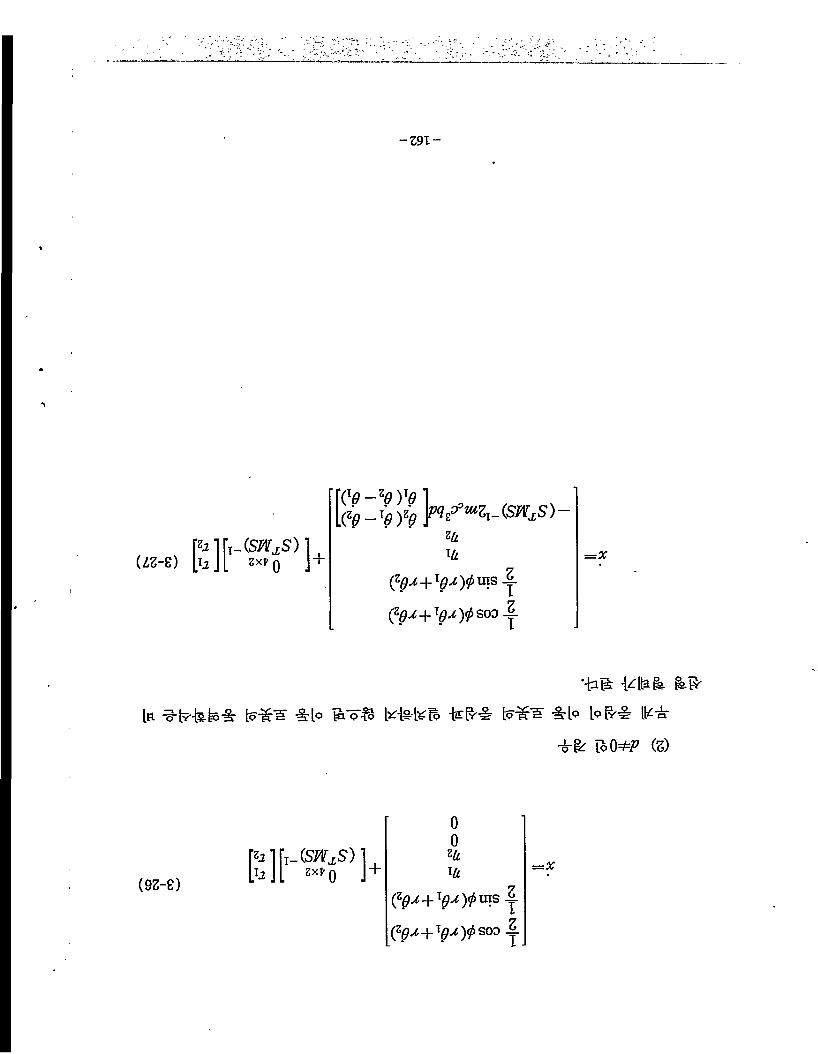
£91-
(zz-e)pilLCsWjS)]ML m0 +
(TQ — ZQ VQ 1
z(lT&
(Z^+T^)$imsl
(zQJ+J0J)<pso3 j
=x
'tiR {&&. &.R-
Ifl &lo Ri-o# HskB tetH: Mo [oIK*
*£: E>(W (Z)
ML m0 +
00
zuT&
(Z^+T^)$5ms
(Z^+T0^)0SO°
ZIZI
(9z-e)
4] 3 ^ 4]°] X| hardware ^3: #4]
#4 #«3 4^# hardware #5 #44 ###- 4# 5#5###
5# 44#-. 44 €44 447} 7}## 4, 44 4^# software 7M°1 445
-& 4,4^44 45 4# 4 £*s 4^# 4^4 7}## 4## ##
*1 #-&-# ^ ^4- 4#44. 4€# 5#54# Etfls. 44# rackifl^l 4 #7]]#
microprocessor module# 44"# # $1# VME bus rack#- motorola 68000 4#
# CPU module## 444&4-
1. VME #dh
VME 4—4 VME# Versa Module Europe-4 445.4 > Versa# 25544"
7} 68000CPU# #4 7llft 4^4 43144, Europe# VME4^ 4^H#4 5
5 3.7)7} #47}5QEC 4 DIN4 #4)4 #44^. 4## 4444. Versa# dh
# 55# 4# 444 # 3.444, 44# 444 #4# 344 44444 g
5 57]# 54 47)144 #5)55 57]5 ##4 44 VMEti)^°]4. VME4—*11
# 4# 445(single height)# 4# 445(double height) # ##7> $15# 4
# 445 55# ^#4# 100mm* 160mm# #4 4 544 57] 5 Z80#55 5
#45 4# STD# 5# 55# #^4 4#44- 5. Versa#^4 STD#^44#
#^# 55# 4#47] #4 5###7> 7>50]]7]H0T-#55 #4 $1^44, VME#
^44# 964# DIN5##5 #4 44 4#4 W* #45 44.
VME# 3# 68000CPU# 5## #4] 4# ## ##44 ###5 45#
##54 443, din 5## 7fl#4 #4 4#4 44#45 4# 7}# #44
4## o]# ^.s.1611 #s.5fl #44.
5554 68000# ## CPU 5### SBC(Single Board Computer)5 VME
#44 #41 444 #4 4#55 4#7H# 5### VME #3#- 5##55 4
414# t 454 ## ##, 7>## #415 4# 5#4 44^45 ###-5 #
-163 - -
## 44# M#4. 7l]f 4 #1 4444# RS-232C# #44
494 4# 4#44 4-#4 ###4 4444 -§-4# 4# Mir 4## 4- 4
# ^ ##4 4541# 4# 49 1## #3. #4# 9 $14.
44 1# CPU 5=9. VME 4 3# #44 944 4 3 144 4^ 45#
#44 €4] &4# ##44# 45. ^s# #44441 44. 4 41 444 5.#
## 4# #444 zz. 44 ##35 4# 994 #914 #M3s h444
4 4# ##4 5.#4 #44 44;H 4-## 9 $14- 34 a. 44 44 ## 4
344 44# ##44 444 444 #44 4444 4 5#4 #4# 113
s. 444## 44 4#444 $14 4444 9# 44 44 #*3 4^44 4# 9357} 3=] 3-24 44 $14
9 4#4# 494# 1$141, #45. VME43 444 PC43 interface #5.5. system# 9471 444 Intel4"4 i80cl96kc CPU# A]#S}] 544- 4#
4994 4# 5# vision 4—44 PC interfaces 41443- $1# #44—5 5
9 9#95 PC interface#55 4=^8# 941 4#4 4# 59 44 4^4#
9# 4 #4 41# 4#3s 4h4 #4 #4# 9 $1# ##4 $14 4144.
i80cl96kc 4## MCS-96 CHMOS15.S 1645. 4#^ 4435 #5#4
544. MCS-96 414 54# 94135 8096bh, 8096 35} JL 80cl96kb#4
$1#4 4# 39# ##! 144 454 93# 7>43 $14. CHMOS1# 3.4
#, 414 344 #4# 7>43 $14.
-164-
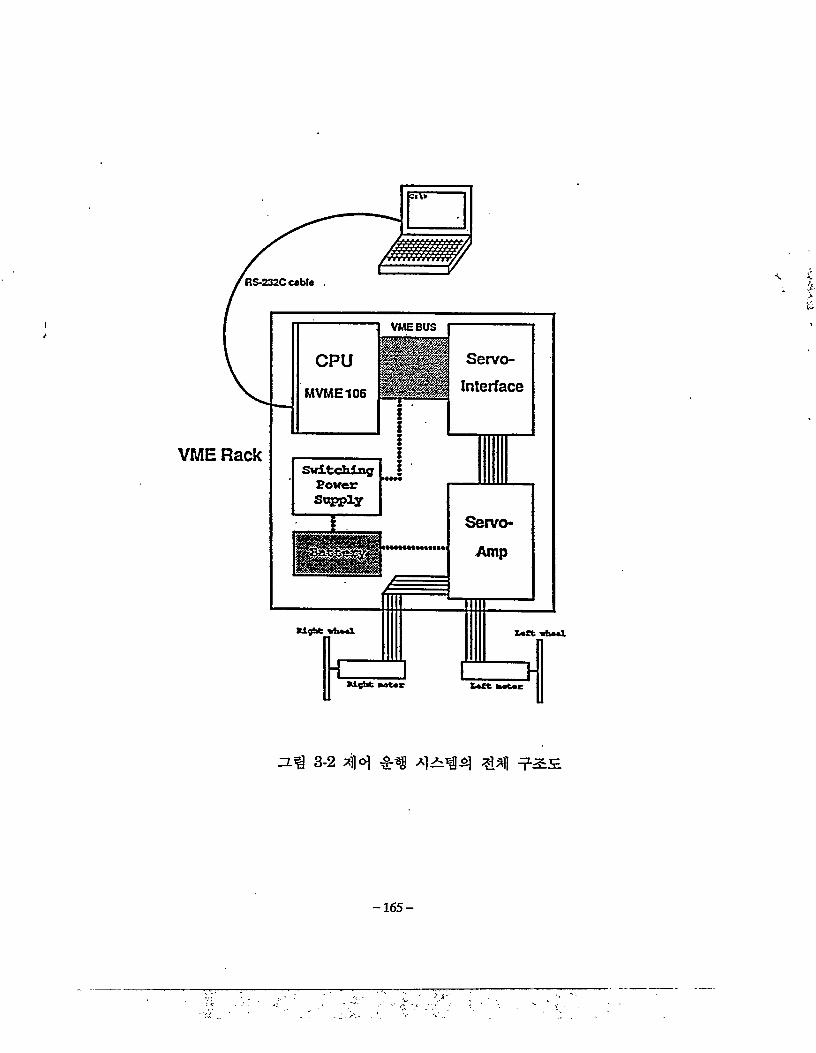
VMEBUS
Servo-
InterfaceMVME106
VME Rack SwitchingPower
Servo-
3-2 *lM
-165-
MCS-96 311* 7l*#SS 16# 5 CPU4 4^* 2324454 #(RAM,
ActuaHy Register File), 4**31444 #31# ** 4*l^)-to-Sfl*1^4
4444, 44 4#5n 34# 44#5 ### # 4 $1* 1045 A/D #44,
44 3#4* m}53l 444 * 4 $14 3.4 VO Subsystem, 44# #31* #
7)] 4#4 # 4 $14 PWM(Pulse Width Modulation)#^ 44, 44
4- 44 to 4# 1- 4 $14 Full Duplex Serial Port, 4^ 27)14 444 4,
4# 44 s 3144, 3144# 5*4* **31 7}*# ^ $14 7)*## 442.
$14. #4 i80cl96kc4 488 4454 RAM4- 16K4 ROM/EPROM* 7}# 7]4
4 MCS-96 Til 1*54 4^4 till5.4# 7>7lJL $15#, 16MHzS 44# 444
12MHzS 444-4 80cl96kb54 30%4#- 4 45.4 12MHz4 8096bhS4* 4
Hfl4# 454. ###55 MCS-96# closed-loop 314, 44# #31 4444 4
4# 4 $14. 3LB1J7 #*)) 5% 2.4 7)14, =44, #4 314, 4#7l, X}*4
ABS(anti-lock brake system), AC 5.4 314, 4—-3. 5445 5A)5 $14##4
4 4 #711, ##3=3144 45.7144 443147} #5# 54 #344=414 444
31 /}445 $14i80c!96kc* 54 #5*41 7}*# #-f PWM### 4# 47} hardware?}
#5$14 4## 3* * $15 544 #*4 #54# feedback sensing* # #
*31 *54 A/D #445 444 44 $14 4# 4*4# 44 ##*
hardware^ 54 *5*4 7}*43) #4
5B14 #7)15 ##31 7i*s}*4 $1471 *317} 4 4* #*31## **34
*4 $1471 *57} 54 45# #44* #4 ## 31 #31 44, 31*4*
library function4 #444* # 44. 544 #7l# ##* 54 445 53) 4
#4 ## sampling time55 *5*# 4 4= 4*31 4# 43# *44717} *4
*1414.
—166 —
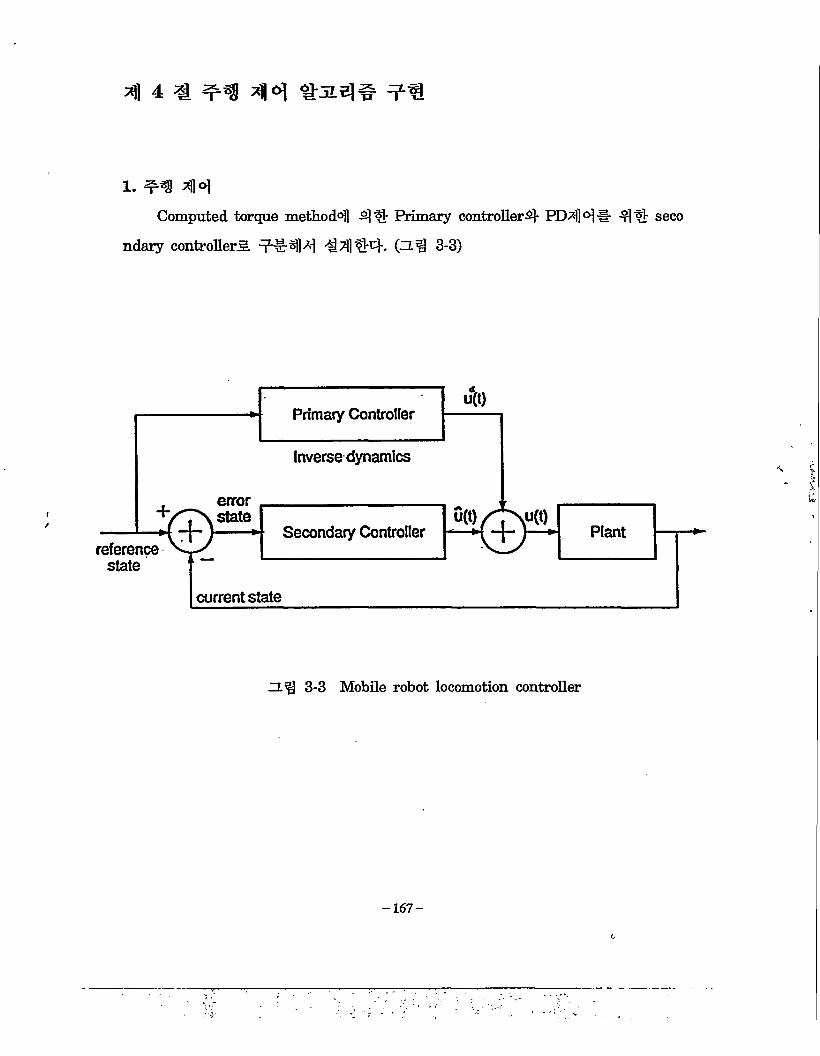
1. ^=3 44
Computed torque method6!] 4|% Primary controller# PD^I]6]# 41% seco
ndary controllers, ^^1%# C3.fl 3-3)
Inverse dynamics
errorstate
referencestate
current state
Primary Controller
Secondary Controller
ZL.i% 3-3 Mobile robot locomotion controller
—167 —
(1) Primary Controller^^-(manipulator §1 4# 3.#)4 -§-444# #443. -^-3E.5>7]
44#4 44%4-E.3. 4444 4%4- #4= -frS-Q 5L'i4 4444^ 44# 4# 4:1:# 4-§-#4 4# 4®?# 4## ^3. 444 44# #%# # # 4# 444- Primary Controller# S4 #4 4 -f-S.^r-4 S.^S.^-4 4 4 4 ^ "6" 4#4 #fe4 4%3-S. 4 #4
2#44 #4 s.## 44# 444a 4#4 #4 4%444.
[3=[/^)] + [B2UKd (3‘28)
4 3## s.# 44#44444 #4 #4444 %44 434 444,
f2(x)=-(S%) ™1(S7'^+SrK)
Bz(x)=(StMS)~1
444 #4 %2=%i 435.
=/2(at) +B2 (aO r(d (3-29)
4 5.H# fajl^ </=04 4# 4% 43 fiN=0# 4# 44%4 €4.
/2(x)4 B2(x)7]- 44% 4 44-2- 7}4#Ra computed torque method# 4#4 4
4%4# 444#4" &# 444# #44 4#4 44.
/(*)= [B2(^)]-i[^-^(^)] (3-30)
—168 —

(2) Secendary Controller
2MSL*1-4 <$-#±2. til: J2-*}# ^^^7] 41 #M PI, PD Jpgr
PED 7)1 °17] #-& ^^1^4 primary control^ c|?}-4 ^]o\
7}#4. PD 4^71^41 7110] ^ ^Kerror)^ 4# 2*}
M^IAS. safe 4&4 #4.
Kt)= [B^T'l-Uxi-xft-k^Xi-xfo (3-31)I/
(3) Total Controller
^6]]7^ -^t!r contrl inputs ^°1 plants 41^44-
i(t)=Kt) + At) (3-32)
4eW,
Kd = lB2(xd)r1lxf-f2(xd)-Uxx-xf)-kp(Xl -xf)} (3-33)
e=^-xf 5> /2(V)~ /2(x), Bi(^~ B2(x)4 7p§*V
^ 2#4^1 #^^41 rflS^M 7Jb1^ ^o] ^4.
e+^rfe+^e=0 (3-34)
4 <gs]£] 4M <9^ 4##fe w sa4.
-169-
2. 32.BMM
(1) PWM4- 4-0-% 3444
■944 457] 44 34 4444 45 3(Iinear servo amplifier) H-
4## 447} 9"## 4^3 <i43 ^4 4 #4 3 $14. 34 4- 4M 45 <g
5 44-Sr 314537} 371 444 S:i:4 4EJL ^o| ^ro] i|nS #54 44447} 4A4-711 44. 444 h.71 4 97117} #7}4-4 7>4 444 3$14 43 #
5. $14 44 437} 43SL5. 4#4 945 #54-4 44.44 44 4435. $14 4^dz57} 44 #4 #444 434-711 4$l3 zl
44s. 44 44 4^4 43 9-44444. #3^ 43 94444 444 4
#44 ## 4 $154 444354 9-4 54434 4-444 5544 444
0(zero)44*. 443 A}-g-E]^ #5# 43^4^14 344 90% 4444. 47H1
349 5^4349 power BJT ^-4 power MOSFET #4 3444 BJT9 3
44, 4444435 MOSFET9 3^44455 43 343 $14. 44434
49M14 T-9-4 ^ H-bridget|4 $144 ^4 ^ #^#44 4## H-bridge^
4 7}# #4 343 . $14-. H-bridge^4 719 457} 3*g 3-44 44$14 44
4 4 49444 H-bridge 9-# 434^1 On, 0ffX|4 444 4^4 Tr.-i- 44
On 445s. S}9 #5# 43 44# 3^4^4.
-170-
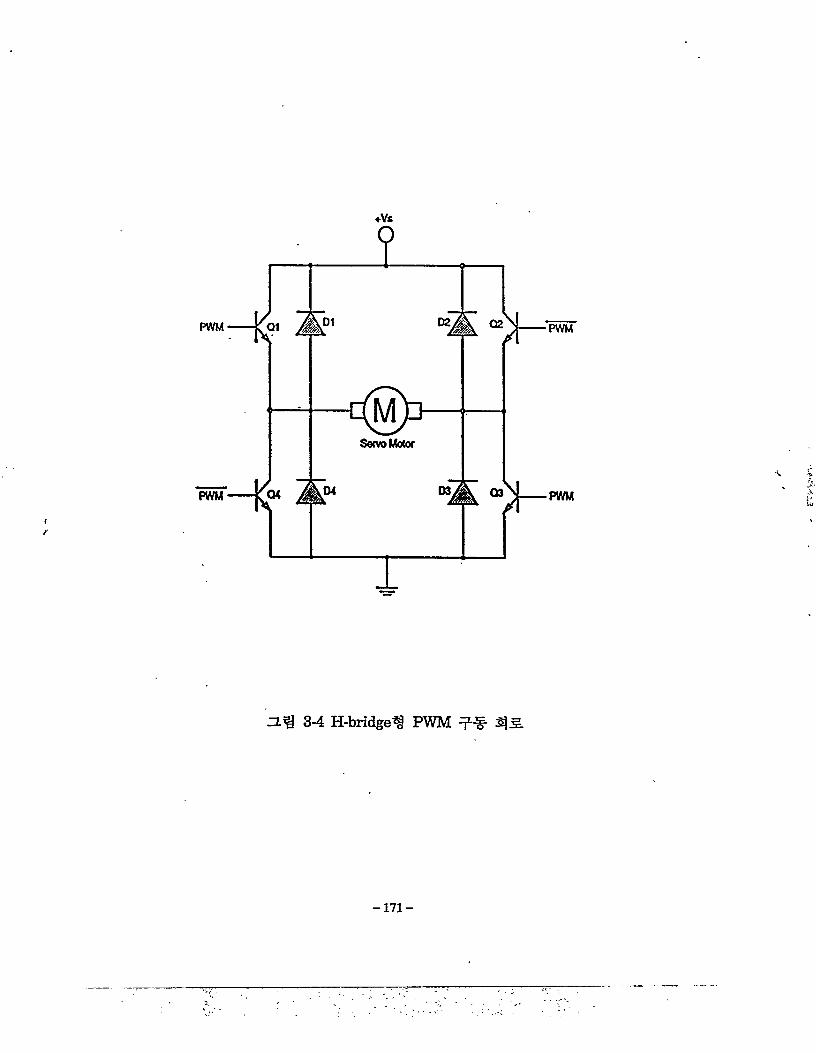
♦Vs
3-4 H-bridge^ PWM 3*3.
(2) Feedforward ## 44 #4
34 ^144 2147] ?}#- fAt 314 44 7iM#4 44 41 #7]
# &# ## 44-7]- #34213 44 44# ## 4tel- 7}# 3 4-0-43.$14-. 3414 A] #4# 444 &# 4 #4 414 #35# 4444447} #?}##-
4 4-4-7] 5.44 ^5414?} ###7}#4-?ll 443 34 #44 4 7] # # 2l#4 #3414# # ##414# 44# 7}##. ##444 4-435. 7}# #4 *43. $1# 4-4# 4444 44 #447] &4# 444- #4, 4# ###J:4- #4 ###4 444 ## 3##J:3^-4 ### #3^ 45## 4#4 344 44# #### 444-. 4# 44 4=44435 #44 #### #4
47] 4# 45.7} #34-4 3# ##4 553#35#4 43# 7]###-#3#
4-#53#35 ##### D/A converter?} #344 44.
#4= ##41#4 #3 01# ##44 444 214# 4# #7}## #34114# #37} &711 43 44-7] 7}# 4 371 #47] ### ?}# 444. 44 ##
##35 7fl## #4 Feedforward ## #14 4435 7]#4 ### #45#
## Tsukubatfl 44 Yuta3^## #3# #5 ## 44# 4#44 ###44
4#4 #4# 7}44 ##41#014 ##414# # # 21# ### 7fl#4^4. 4
# 4 #3# #5 #7144 ##### 711444 W##4- #?H4 34#5 g
#3# #5# 7}o)4 4^1# #4444, 7]e## # #70 #37} #4## ##
33 # #3# #5## # # 2154 24# 414## ## #, table look-up#
#47] 4 # #4 (sampling) ##44 444 #3# #3## ## # $}5# 4
# 4# 44. 344 4 4## 4tsn 43 # ##31# 43# 01 #354 4 3^14# ##4t11 ##217]# n. b|]4#4 37]7} #444 #335 4## 3# (interpolation)##4 #343 3# 414# ### 4# #3# 7]4#47} 3### #44 #4.
44-7] s. #^-611 A]#. o]4# 15# 71444 014 454 ### Til#4 4
-172-
f «^TQVvj.
4 4B44 44-& zl 7114 4441 44 27M5. ##41 S.&4.
(2)1 W4B 44 44
314:4 44# 4^1 44-44# 7}4#5 4# s]#Wpple)4 4^4#
44%# 4% 4 4 % 4 444 3]4:4 W4##- #444 # 4^ PWM ratio#
4444-4 5.44 4#44 44*.
Tum-onsq## 44 #7}43.# z%4 3-54- 44- 444 FQ1 4 F^,# Fs
4 44 45.53. #44.37, Vi=Vs— V^ ^ r=^4 44
m = ^-U~e^]+ixle~^ , 0<.t<.aT (3-35)
Turn-offs]5$# 4B 5^) 3-64* #4- Fp# #44-5. F2— Fs— Pem/4 4
4t/ (t—al) (t—tzT)
f2(d = -^[l-s r ]+^e r , tfT^T (3-36)
45- 4## #47] 444^ ^i4 (&# #44 44. 44-4-4](steady
state) °1 5i(T-aT) (T-aT)
ixi = h(T) = Jft' [1—e r ]+4g2% (3-37)
F, _2H ar«*2= ii(aT) = -g- [1— e ]+^e (3-38)
-173-
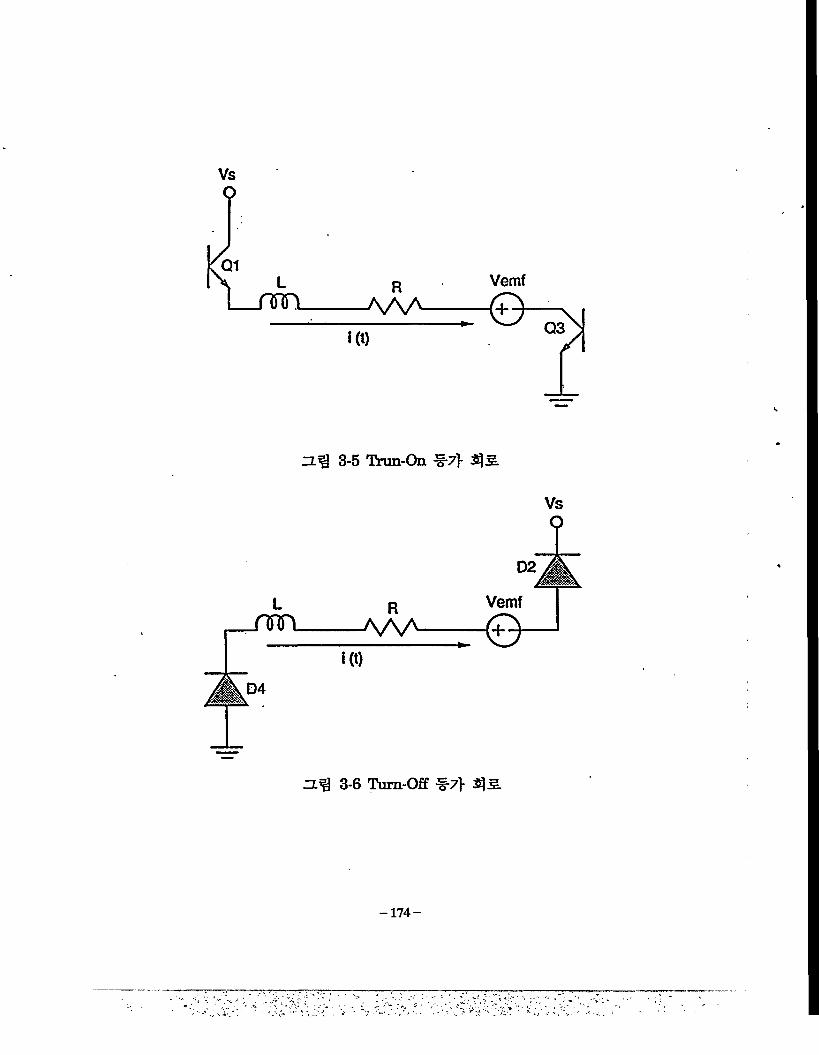
Vs
nf) 3-5 Trun-On #7} 3)3.
Vs
n.% 3-6 Turn-Off #7} 3)3.
-174-
44 99 444425 4 3-374 4 3-38# 9944 #2. 44^29 4#AT=aT} T (T-aT)
hi~ 3X- [^i(e r — e T) + V2(±—e r )] (3-39)R( 1-e r)
4 4:4.
i __gZ _-»r _XZTT C^iCl-e r )+;^2(e r —« r)] (3-40)
jR(l—g r)
44] W4fHi- 414^29 4414 44 #4.>aT
ia=\ [J[ faTi2(t)dt] (3-41)
444 # 44- 44 4KM 59
F^TJr ax
i? ' i?y.r —&Z —sH^(e r -l)-4iKe r -1) 0-42)
/:r i/L ynT —Vr-aT) —(r-ai?4(^)^=-^(r-aT)+^(g r -1)-Wg r -W3)
R
4(3-39)4 4(3-40)2.5. ^4 i*Mr 4942 4449 44 « 4
94 999 44 f^H44.
ia = -j^- a— -j=r Venf—■^■ = -^-{2a—l) — -^Vemf (3-44)
494 2a—1=0 5 11442 Venf—KyO) 425 {Kb : back emf 449
-175-

(3-45)
yS=2tf-l , .
4 453.^4 fe/4 #5. <y7> ^444. r% sM-7] 44 4
5:-ir(PWM ratio)7> f ^H44. 444 4# ^14 -f-5(current feedback loop) g) 4
£ 44-4] 4, # #5.4147> 7>^S>7ll 44.
(2)-2 Deadjbeat -g-44 44 4 #4] 4
4# 414 ^-H.(current feedback loop) §14 414°11 44 44414# 4# 5£
444 aj-|0S cf-g-4 #4: ^z]-5j] # ^ #4- 4, 344 444 #4
dfl til5)1 4414 #44 -g-44 #4# 3445 7}444, 44444
4 sampling time# 4 4#57l- 44445 44 44 5.4 444 °1 4# 4 4 14
44 45. 45- 44 Deadjbeat 44447> 4# e^Tll 44 445 4 ^4 #
4 7ie 4ft #»>7>7ll 44.
E{kT)-KbvikT)L
where E(kl) : t—kTQ 414 T^a(3-46)
444 V(kT) = E(kT) - Kbw(kT)45 45 t = I/R 44 44 4 3-4653#-
4 4#4 4 4-2:4.
(3-47)
4714 t=(k+l)T* 49145 4# 444 5444 4^44 #4 44.
-176-
Tr (3-48)i(k+l) = e 1—e
R V(k)
#, 'S-n'C i(k) )# #31 4^\E.( w(k) )# #44. tf-§- sampling time
414 4#( i(k+l) )# 44# t #?ll 5131, 4# 4^44 4^g- dh^4 #
w7>, #4^ 7]e 4# Ire£7> 4^ V(k)* i#4^# 443 4 ^ 44
4, 4#^ 7]### Iref# #4 7>7ll €4.
4 3-484 i(k+l)4 Iref# 4444 V(k)# #44 444* #4.
V(k) =-----— % (—e r /(A) +/re/) (3-49)1-e r
4# 44 #4
_ TE(k)=Kbw(k)----e _x i(k)-\------- ~^_x /ye/ (3-50)
1-e r 1-e r
7} 43% 444 a(duty ratio)# E(k)/Vs 4—5.
Kbw(k)---- Re _x i(k) +-----Iref
1-e r 1-e rVs
(3-51)
7} €4.
4-3.4 4 sampling time44 4-4 414:—3 a# 414 44. 443 4-§-
44^ 4 #4## 44 4^ 444.
-177-
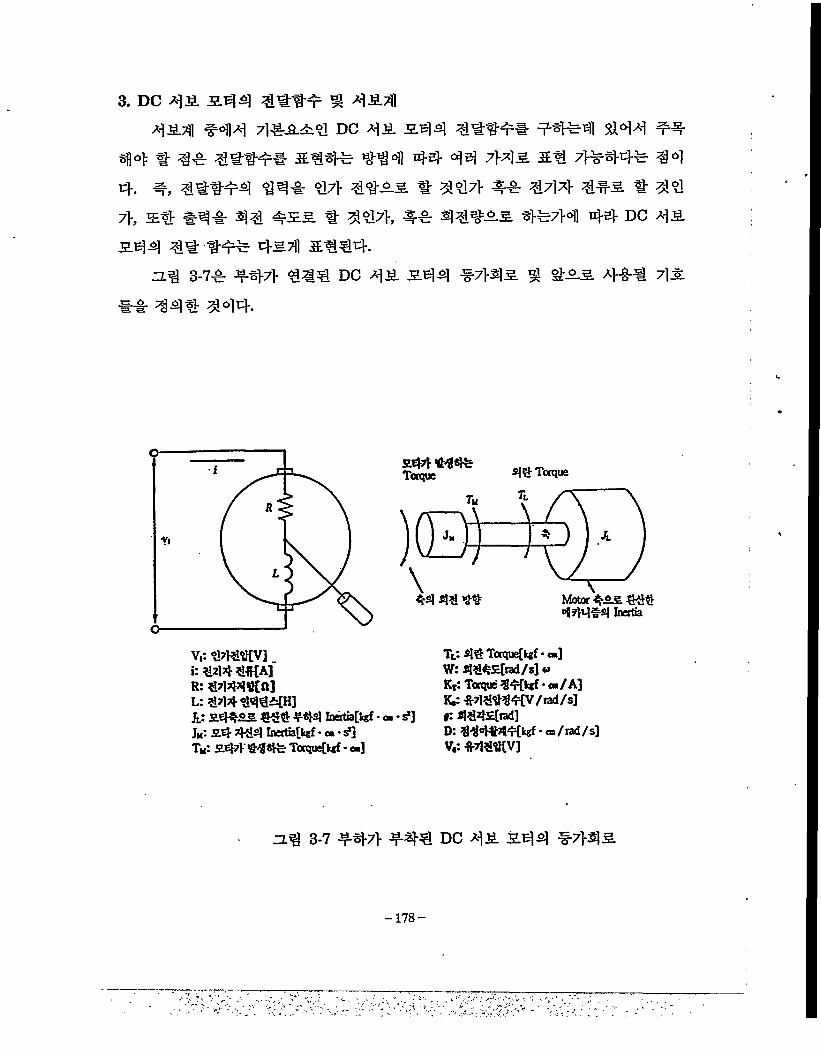
3. dc Ajs. 5.44 44;thr ^ 45.711
4lMI 44-^4 DC A-]jL JE.B14 ?4^4 $14^1 ^4
fsflo} # 4-B: ^OTt# S-^lrr 44 44 7>45. 7}^}4tt 4°1
4. #, 4OT^r4 44ir ti7> 44^-5. # 4717} % 4717} 4^-5. # 44
7}, s# #44- 44 # 447}, 444-^-S. 4^7H 44 DC 45.
5.44 44: IMr^- 4—7ll S444.
ZL^ 3-7-gr 4^-7} 444 DC 7}M. 5-44 ^-7}4& 4 S5.S. 7}4# 7l2.
## 444 444
V,: ^to-atV] i:tizW5ft(A]R: 3zl*W«£n]L: ^14°J^€4H]JL: H44AS. @<# 444 tootiatkgf • JK: 2.4- 4tl4 Inertia[kgf • c* -s']Tk: 247K#8#c Taquefltf - <■]
££=*"*
Motor4)}4#4 batia
TV 4% T<xque[kgf • <■]W: 4$te£trad/s] « KI:Tomue=§‘Kklf-a./A]K.: *7l^4=[V/iad/s]
•£] f- 4S4E[rad]D: ^4#4f[kgf m/rad/s] V.: *7t«KV]
zl4 3-7 ^-4-7} ^-44 DC a-is. 5.44 ¥7}4s.
-178-

(1) tl7} 44 Vi4] 4# 4 #^5. W4 4# 49(W/Vi)
5.44 ^7]^> ^<>11 <>14 4^7} &44 43H^1 43144 4714
Me>7l ^#4 444 3-527} 4^4a rz.1 3-744 44 444# 4l#43-534 °1 4H#4.
F0=-KeZ (3-52)
F! = Lz '-hfff+Fo (3-53)
4441 5.44 M Torquexr ^#4 4314A 44Ste*4#:E=Torque4
#^ls.V4 4#4 #:# 2?H4 44 #5.44.
T^Kji (3-54)
JW+DW= T (3-55)
t=0444 2:7)4# 4 (zero) AS 4-5 44 444 4# Laplace #### 4
#4 #4 44.
V0=KeW (3-56)
F1 = Lsf+jyr+F0 (3-57)
r=irTJ (3-58)
/sPR-jDP7= T (3-59)
44 47114 4AS9-4 4W# G = WVi# 9-44 4 3-604 44.
r__z__________ &________G~ Vx ~ KTKe+(Ls+R)(Js+D) (3-60)
#43. L4 D# 4# 4^r ^o]7l 4 #4 9-4 7}#44. 444 #3-60#
4#4 3-614 44 # # $14.
G P7 5r Vi KTKe+JRs (3-61)
-179-
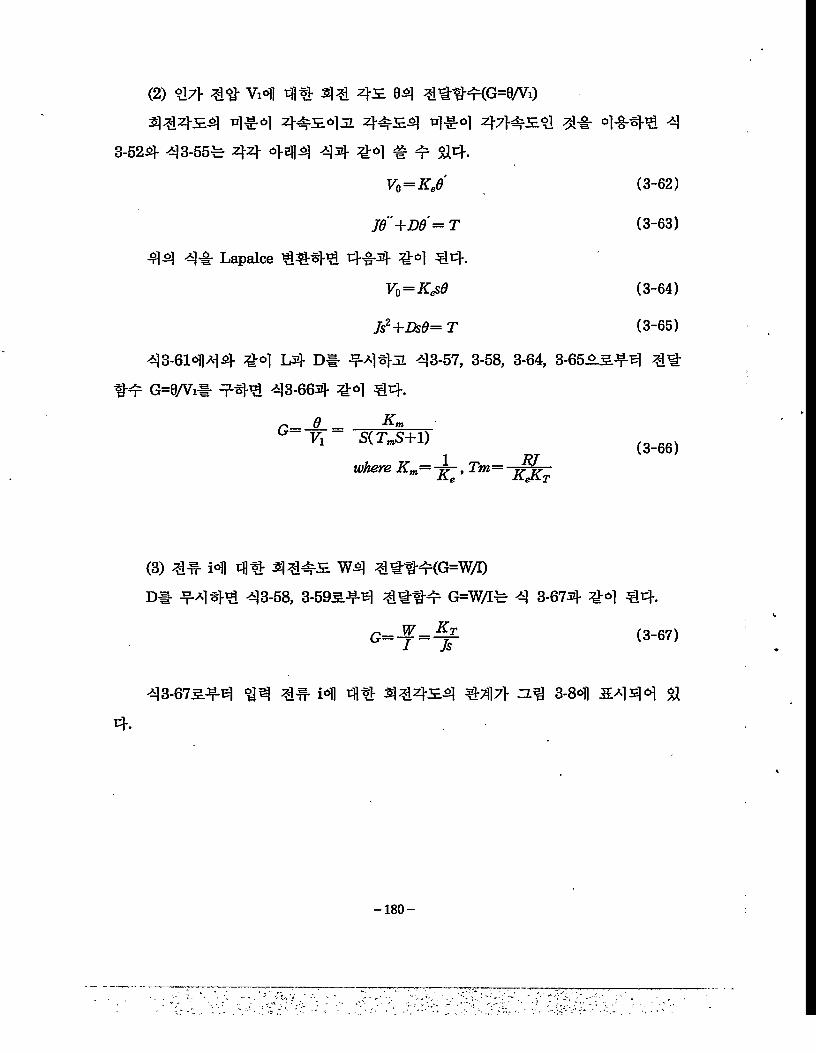
(2) 917} 44 Vid)] 44 45 84 4W^r(G=6/Vi)
44454 44-4 44545 4454 444 47}454 4* 4-§-44 4
3-524 43-554 44 4-^114 44 44 # 4 $%4.
Vo = Ke6 (3-62)
J6'+D6 = T (3-63)
44 44- Lapalce 4444 444 44 44.
Vo=^ (3-64)
Js2+Ds6= T (3-65)
43-61444 #4 L4 D# JM4-3. 43-57, 3-58, 3-64, 3-65A3.W 4#
#4" G=8/Vi# 9-4^ 43-664 44 44.
p— 0 — ___Fi ~ S(TmS+1)
where Km=^,Tm=^^(3-66)
(3) 4# 14 44 4445 W4 4W4(G=W/I)
D# 4-444 43-58, 3-593.4-4 4W4 G=W/fe 4 3-674 44 44.
s=f=4 (3-67)
43-6734-4 "2M 4# N 44 4445.4 44)7} zl% 3-84 &444 $1
4.
-180-
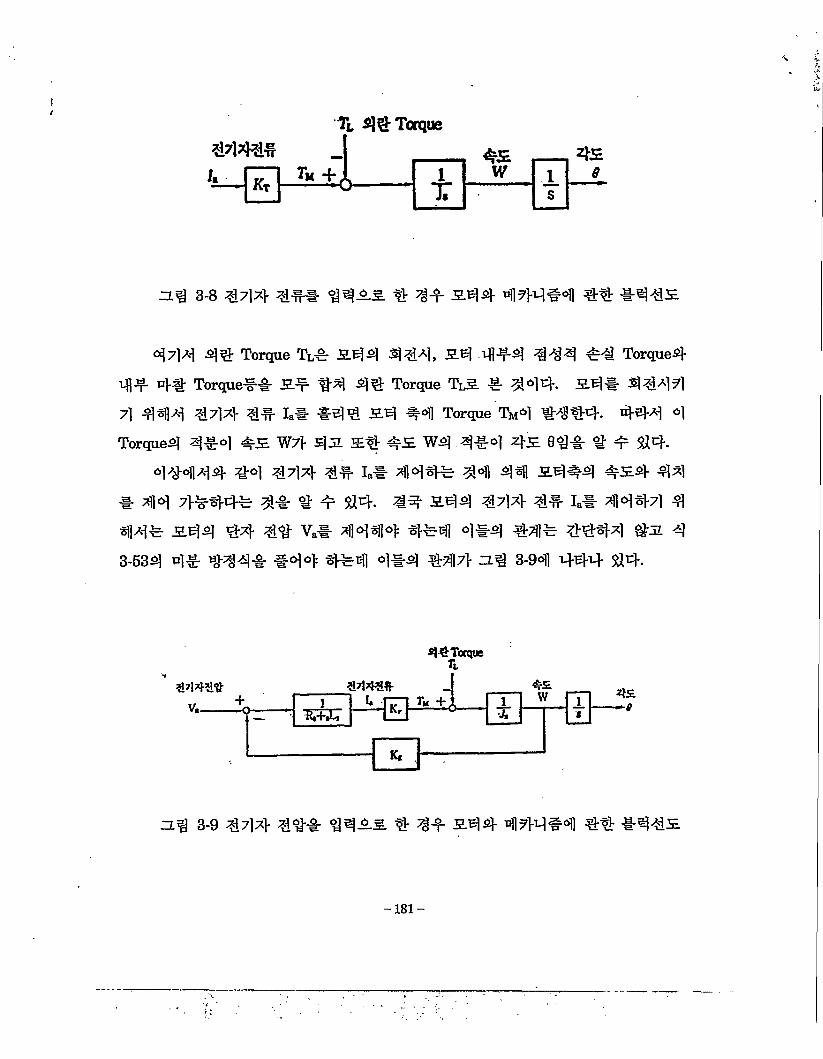
Tl Sj# Toque
2D 3-8 ^7]x> ### <9422 H ## 244 4l7}4#4 ## #4#2
47]xi 4# Torque TL-8r 244 3]#X|, 2.4 iflJf-4 *# Torque4
iflw. n}^- Torque## 2# 44 4# Torque Tl2 #• #44- 24# 4##7l
7} 4414 #71#- ## la# #4# 2.4 #4] Torque Tm4 #4 #4. W °1
Torque^ ##4 #2 W7> 5)3. 2# #2 W4 4#4 42 8<9# * 4= $14.
4*4144 44 4714 4# la# 414 4b 441 4# 24 #4 #24- 44 # 414 7}*44b #* * # $14-. 4* 244 44x> ## ia# 4144-4 4 44^ 244 44 44 Va# 414^4 4b^l 4*4 #31 b 4444 ^2 4 3-534 4# 444* #44 4b4 4*4 #417} 2D 3-941 4-4-4 $14-.
*l-6 Toque *1
2D 3-9 #714- #4# 4422 # #* 244- 4l7>4#41 ## -8-4#2
-181-
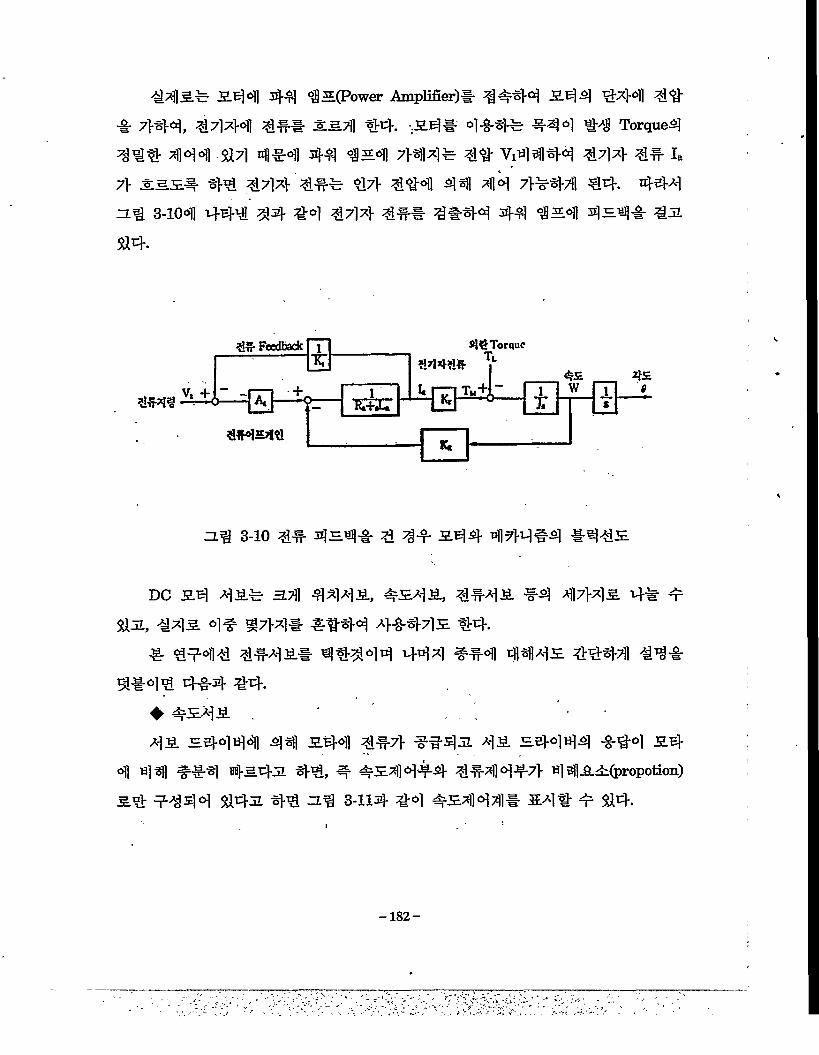
*42* 49 (Power Amplifier)* ^*49 299 4:491 44
* 7}49, 4 7] 49] *** Jl = 7]] 44- -29#• 6l*4* #4 9 M Torque^
414 999] 6)7] 9]*9l 4-9 °|29] 7}914* 41 VltiWM 494 ** la
7} ia£# 4^ 4714 4** 6%7]- 419] 441 49 7}*49 44. 444
3| 3-106)] 4b}t4 ^4 49 47]7} 4ft 4#44 44 1291 424# *2
$14.
«MS
24 3-10 4# 429# 4 9* 2-44 444#4 *942
DC 24 42* 27)] 4942, *242, 4*42 *4 4442 4# 4
$12, *42 9* #7}4# #149 4*442 #4.
* **42* 4*494 4-44 #*9] 4442 444-7)] *4*
9*44 4*4 44.♦ *292 .
42 24944 991 29-91 4*7} #*92 42 24949 *49 24
6)1 491 ##4 4242 44, * *294*4 4*919*7} 9 9]2di(propotion)
24 #449 $142 44 ^4 3-114 49 *2494# l^lt * $14.
-182-
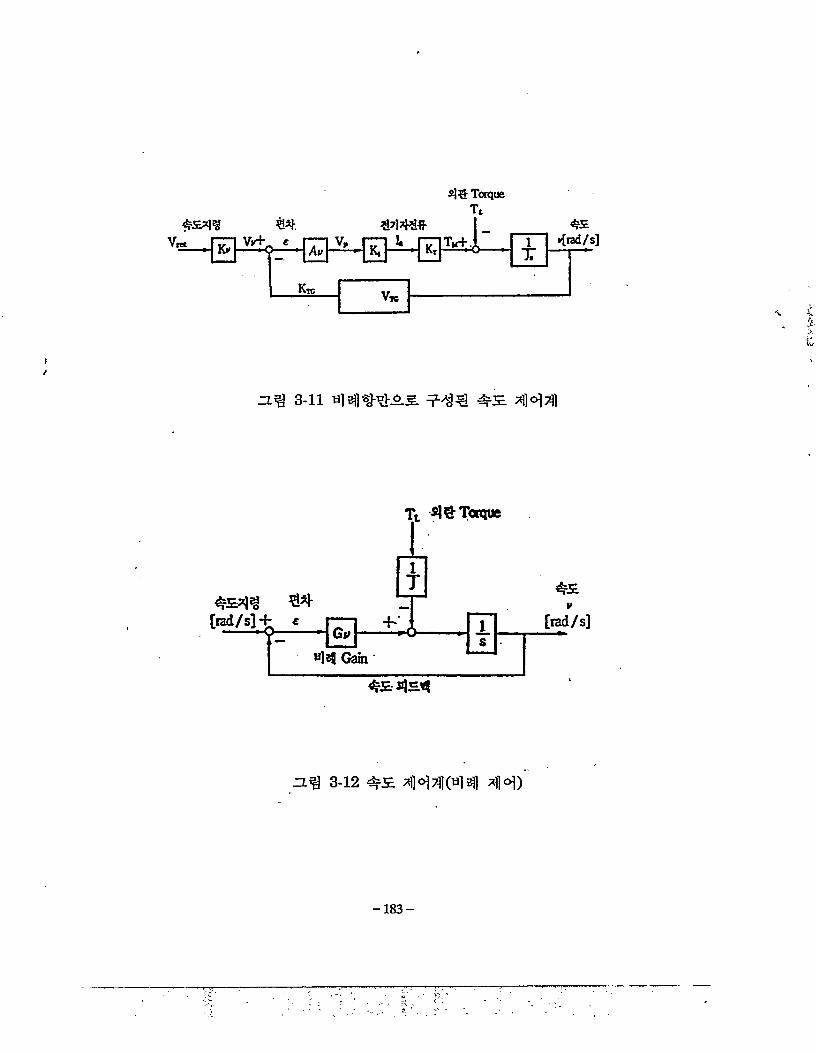
s] 6 Torque Tt
3-11 9-^3 4*5= 44^1
[rad/s] + « [rad/s]
«MGam
ZL% 3-12 4*5= *\}*\)
-183-
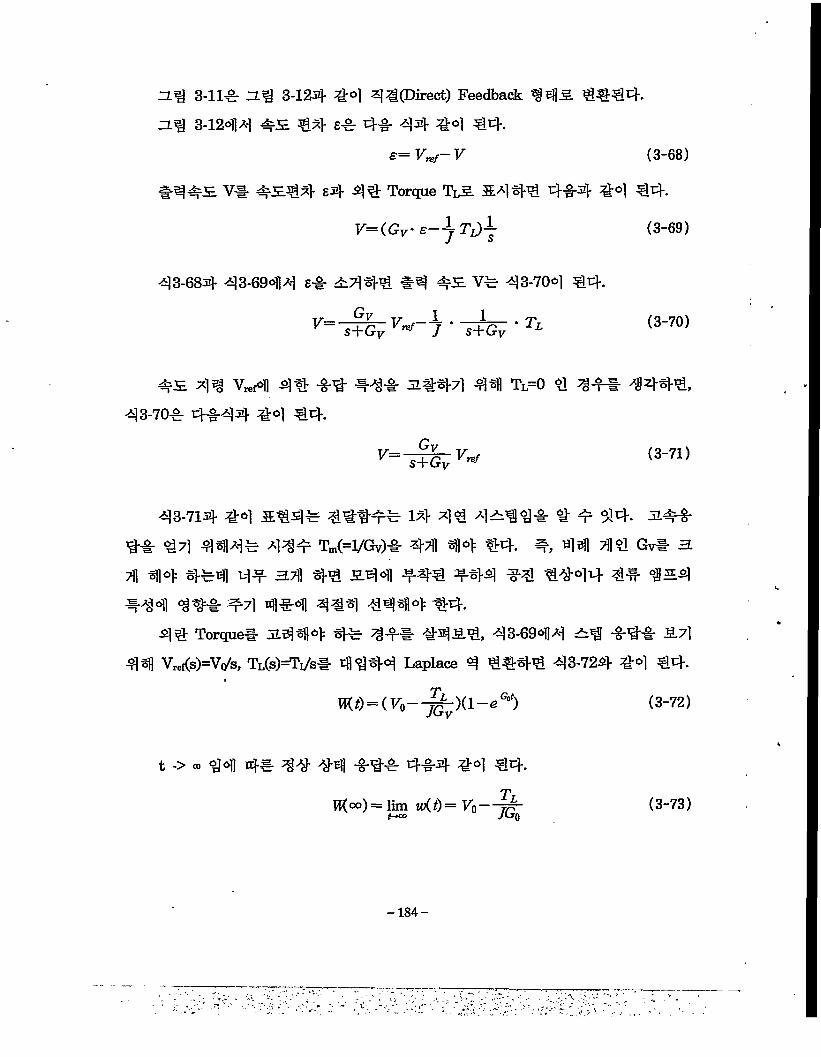
ZZ.BJ 3-11# £^ 3-124- # ^(Direct) Feedback MS- ^444-
zz-l 3-1244 #£ 44 s-8r 4# 44 44 ^4-
e= Fre/- V (3-68)
V# #£44 s4 44: Torque TlS. $444 4#4 44 44-
F=(Gy e-yrji (3-69)
43-684 43-6944 8# £#44 #4 #£ V# 43-704 €4
y= S+Gy J s+Gp tl (3-70)
#£ 44 Vre41 4% #4 4-44- £44-4 44 TL=0 4 44# 444^,
43-704 4444- 44 44-
y=Gy
S+Gy (3-71)
43-714 44 M4# 4OT## 14 44 #£13## 4 # 44- £##
4# 44 444# 444= Tm(=VGv)# 44 44 #4- 4, #4 44 Gv# £71] 44 4#4 4# £7fl 44 £44 #44 #44 ^4 4444 4# 4=4
#44 44# #7l 4#4 444 444)4 44-#4 Torque# £3)44 4# 4## €4M, #3-6944 £*§ #4# £4
44 VreKs)=V(/s, Tl(s)=Ti/s* 4444 Laplace # 444^3 #3-724 4# €4-
PKd = (F0--^)a-eCif) (3-72)
t -> . 44 4# 4# #4 #4# 444 4# 44-
WC°°)= Jim wU)= Vq — -jjk^ (3-73)
-184-
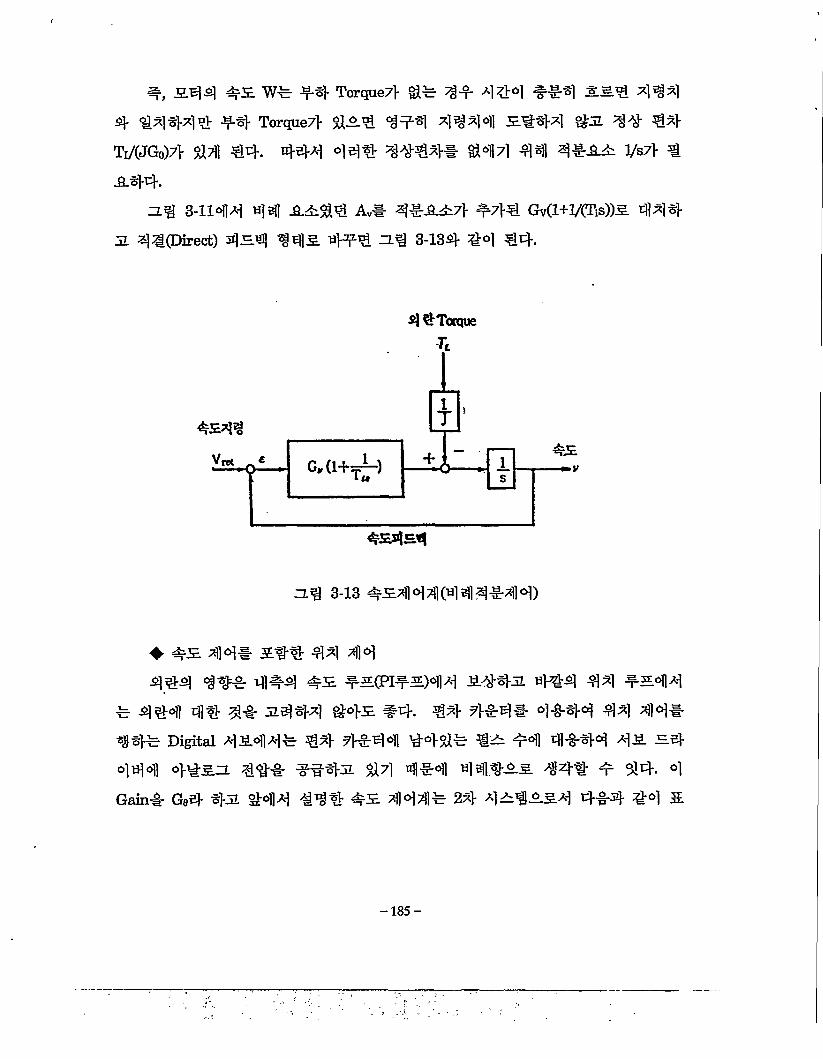
#, 5.44 *5. W* #S} Torque?} 3* 434 #*4 £5# ^134
4 #444# ## Torque?} #£3 <9*4 4344 £##4 &£ 4* 34
Ti/(JGo)7} #4 33. 334 44* 3*34# #44 34 *#££ Vs7} 3
£43.
zz.ej 3-1144 44 £ Av» 4#£a?} #7}3 Gvd+l/(Tis))5. 44#
£ 4#(Direct) 4£-4 D45. 3*3 ZL^ 3-13# 34 34.
4&Totque
*54=4
ZL^ 3-13 *5.4 44(3 43*44)
♦ *£ 44# £#* 34 44
4 33 4% 4 #4 *£ *£(PI*£)44 5.#4£ 4-34 34 #£44 * 434 43 4# £44-4 £*£ #3. 34 f}*3# 4#44 34 44#
*34# Digital 4£44# 34 4*34 #4-## #£ #4 4*44 45. £3 444 435-zi 34-# *##}£ $}?1 4#4 34#£5. 44# * $13. 4
Gain* Gfl3 4£ #44 33* *£ 444# 24 4£5.4 3*4- 34 5.
-185-
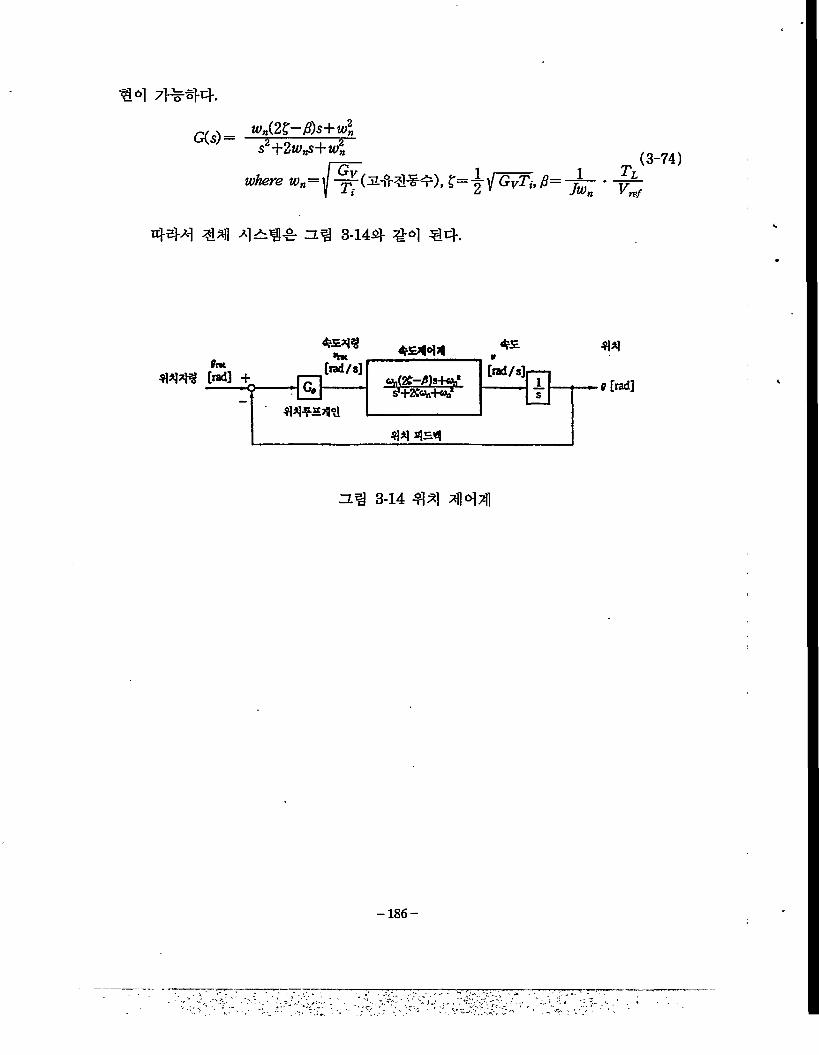
w„(2%—0)s+w2„s2+2w^+w2„G(s) =
where w„=^ -^(jl-n-^^r), ?=y V GyT„ J5=(3-74)
ref
444 4^U-£r ZL^ 3-144 #4 44-
[rad] +
44
9 [rad]
zz^ 3-14 44 444
4| 5 # Simulation §1
1. Simulation
(1) 24 7)] 4 Simulation
444# 4 4#44 44# 4s& 4 #4 4 444 ### 44 2.5] ^
4- Ht4. 44 243# -Sen 44# 4# SU.1 &4 24# *>#4-374- ^
2.14 244 datasheet-#- ## # &&3 4^^2-S. ## # 4# 24 ##7> 4
#44 5U°i FMD 44a BIO 244 44 41:44## 44-4
23] 444 ## 244 44#44-
4 # 4 4 #4=#
44 #4 W 100
#7] 4 444= V/Krpm 8.50
s.3. 44= Kgf • cm i A 0.83
#7]A> 44 Kgf • cm • sec2 0.28 * 10‘3
#7]a> 444^ ohm 1.26
4# S3 Kgf • cm 0.25
ZL4 3-153] 23] 444 #44 1^# #a#-& 4## 4] SM4 44
feedforward 4#44 4:#4# 43# 444 (4#44414 444 4444 4
4). 24 244 #4 34# 44443 23] ^3] #4.# 24 #a-i-
4 ^44# 4 feedforward ##7> 244 4## ### 447>2 #4# 4#
# # #4.
-187-

PWM ratio = 1.0001 CM
-3L^ 3-15 PWM ratio (^^:S.-'&] y#-, ^ -y:Feedforward^^-)
-188-

DB_Current/Avg_Current ServoIjdb
Lovg
ZL^) 3-16 S.B) 3)-^- Servo Simulation
-189-

ZL%| 3-169 944 7]# 494 444 444 97>4 ^(Deadjbeat 94
4- 49 ^6|, W9944)33. 5.4 #^# 49 44-44.
Sampling time# 0.5ms5L 33.2.4 > 1044 sampling44 7]#4## toggle
444.
4fc 494 5.3 444 44 444 4h37] 4444.ZL4 3-1644 # 4= 394 steady.state 499 #7]-9 94 2.# 4#49
# # #47}3. 32-4, transient_state 449 Dead_beat 999 44 4944
444 4 #9 999 543 $14. # 444 4s. 942. 4 =2^4 4 #9
## 4s. #4 7\3i 399 4 9 44.
(2) 44- 5.5- 9*3 44 Simulation
444 9-4 9*34494 444 2.4 939 4534. 4 4 4 4443
9 494 44.
b = 0.188 (m)
r = 0.08 (m)
PD 44714 9 4?44 444 49 5.#4 44^9 3.34 Computed
torque PD method# 444 4444 9 495. 494 2.4 449 333 44 4 444 2.4 44# # 4, 44:4 97>3 44(Dead_beat 949 43 494
4, ^ 54944)9 33334.434 494 44 94343 443-3 5.4 499 *3334.
• O^KO.5 : V[ef=V?f=<Kmls)
• 0.5^K1.5 : VTe/=^e/=0.2(^-0.5)
-190-
• 1.5^£<3.5 : V[ef=V?f=0.2
• 3.5^£<4.5 : V[ef=0.2 .
^e/=-0.2(£-4.5)
• 4.5<:£<5.5 : F[6/=0.2
V?-Q
• 5.5^£<6.5 : FT/=0.2
PT/=0.2(£-5.5)
• 6.5^£<8.5 : V?f=V?f=Q.2
• 8.5^£<9.5 : FT/= T^e/=-0.2(£-9.5)
• 9.5<-t : PTe/=l^e/=0
ZL^ 3-17, 3-18, 3-19, 3-20 o] ^3).# 14^^^ o]# ^^0.5. M
PD 4| 4 7] °11 Computed torque PD method <41' 4# 414717} ## ^§##
iL4# # # $14. 47M1& ^$1^-4 PD41444 4 gam# #4#
4 ## #4-7} 4## # # gain #44 4 #44 #44$
A#, Computed torque PD 41471# gain rflyfl # #### 4# # #
$1#4-. S.# 4 ;g#<41 tflyflA-1 Deadjbeat Current Servov}- Average Current
ServoS] A M4 e 44^r 4 #7}4 4# 4 2.t1 Current
Servo# # 3## zl^ 3-164 44 44# # # $1$14# 4# #^4#
#^^1144# e 447} 81## # # $14. 4-71# #4 zl#4 #4# #4#
4# 4 e 44# S.^714- <41 ##4-.
-191-

PD_Con1rol(DB_Current)wl v/2
1.3 -//
■3LH 3-17 Deadjbeat Current Servo# o]PD^l 7l Simulation
-192-
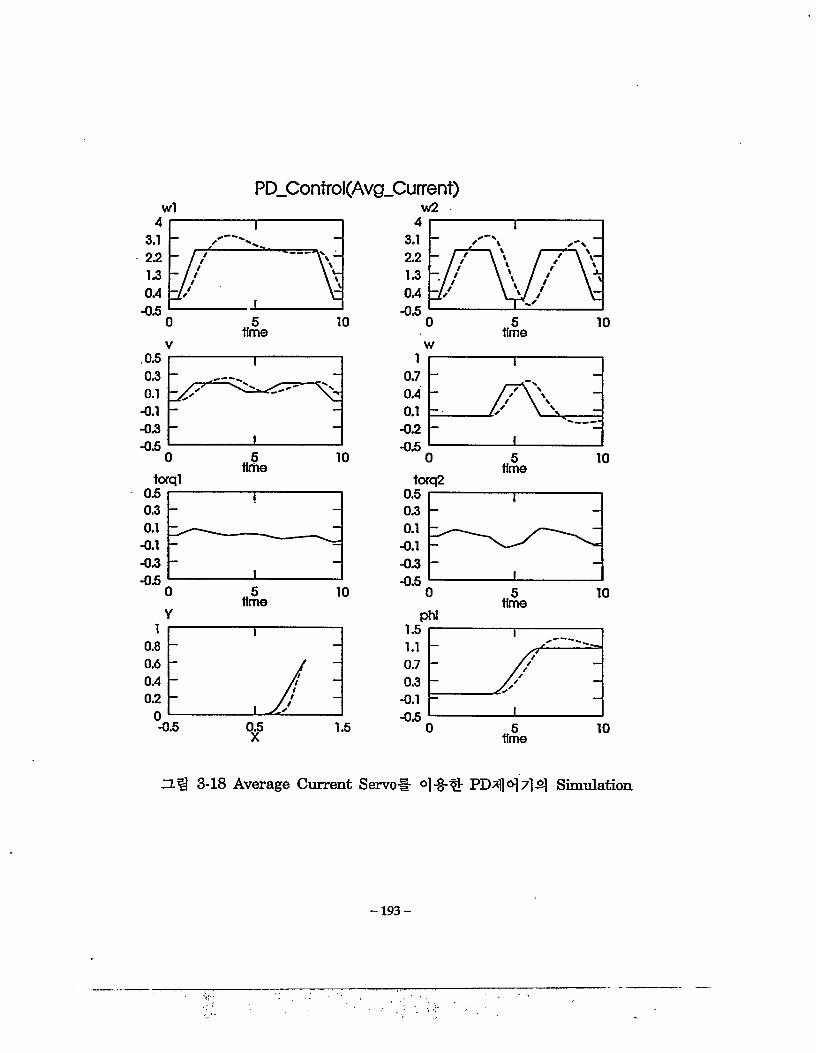
PD_Contro!(Avg_Current)wl w2
3.^ 3-18 Average Current Servo# Simulation
-193-
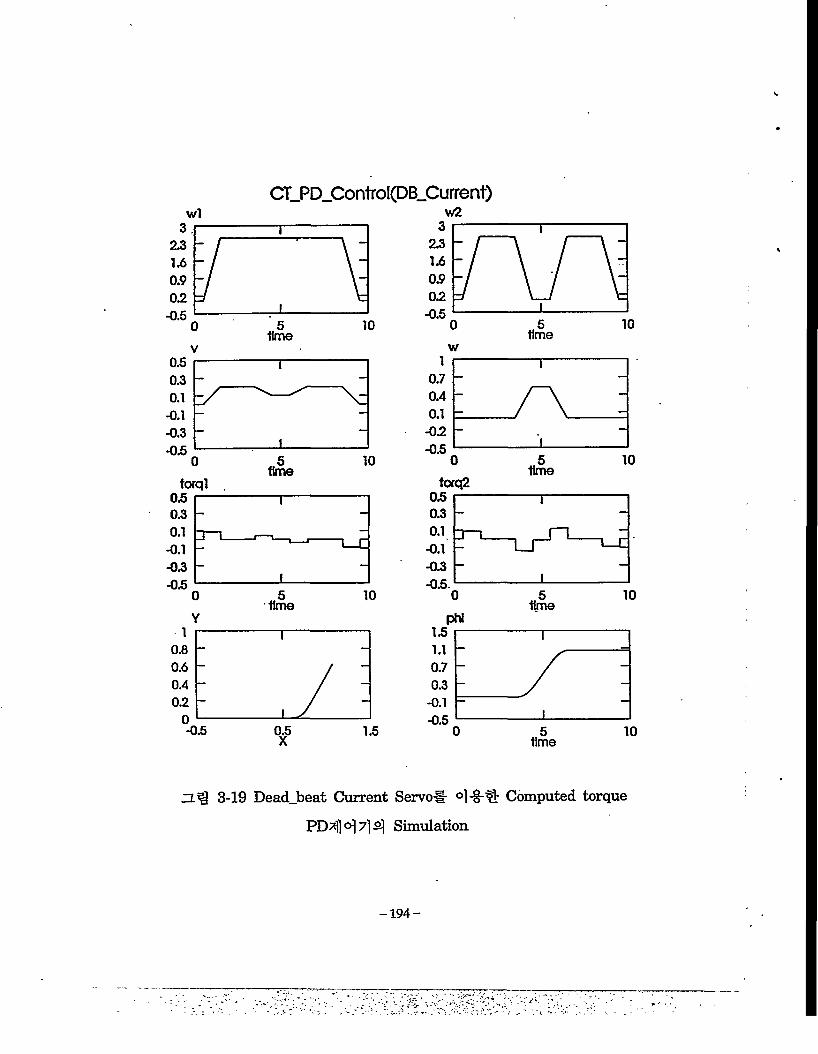
CT_PD_Confrol(DB_Current)wl
0.3 -0.1 "
torql
w2
1A ~
torq2
ai □—l-0.1 -
time
3-19 Deadjbeat Current Servo# Computed torque
PD^ll ^ 7] Simulation
-194-

CT_PD_Control(Avg_Current)wl v/2 •
05
-05-05
—]—
—\=
10.70.40.1
-
-
1-05-05 1
-
5time 10 time10
torql t<xq2
Phi
3-20 Average Current Servo# 0l-§-"H Computed torque
Simulation
-195-
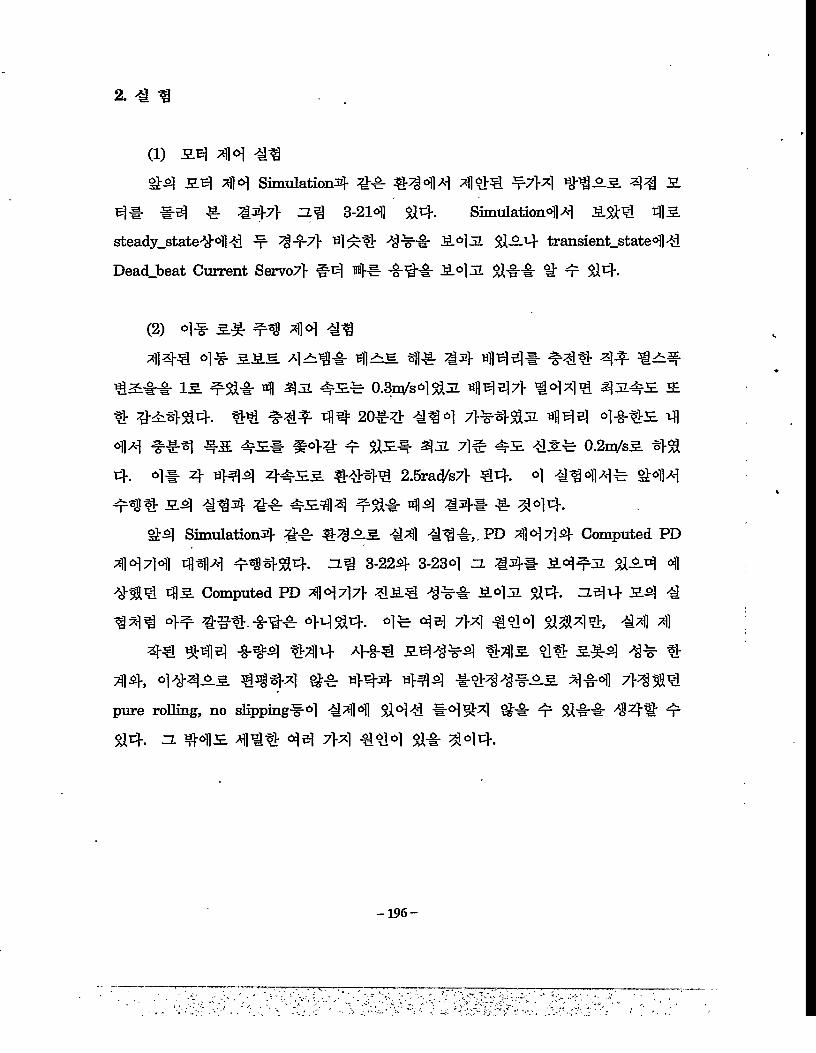
2. € €
(1) S.E) 44 €8
€4 5-4 44 Simulation# % #444 44:# *7}4 4# 5.4# #4 3 #4-71- ZL# 3-210)1 $14-. Simulation44 5€# 4 5. steady_state€"4€ * €#7} 4#€ €33 5.45. $15-4* transient_state4€ Deadjbeat Current Servo?} #4 ## 343 5.45 $133 € # 214.
(2) 43 5.3- *^@ 44 €844# 43 5.5.5. 4^83 4^5. 4# #4 444* 3#€ #* 3^3
€&33 15 *$13 4 45 #5* 0.3nVs4$15 4447} #44# 45^5 5
* #5#€4. €€ 3#* 44= 203# €44 ?}3€€5 444 4**5 4
44 3*4 *5 *5* #4# * #5* 45 7ie #5 0.2m/s5 #€
4- 4# # ti}4# ##55 #r€4# 2.5rad/s7} #4. 4 €844* #44
#4* 5# €4# #3 #544 *€3 44 €#* 3 444.
#4 Simulation# #3 #455 €4 €83,. PD 44714- Computed PD
44714 444 #44514. 5# 3-22# 3-234 5 *## 54*5 $154 4
€S# 45 Computed PD 44717} #5# 4** 545 $14. 544 54 €
"84# 4* €3€ 383 44#4. 43 44 7}4 #44 43144, €4 4
4# 444 3*4 €44 43# 54€34 €45 €€ 5*4 €3 € 44, 43455 #8€4 #3 444 444 *€€€355 434 7}€S# pure rolling, no slipping*4 €44 $14# #444 #3 # $133 €#€ # $14. 5 445 4€€ 44 7}4 *€4 €3 444.
-196-
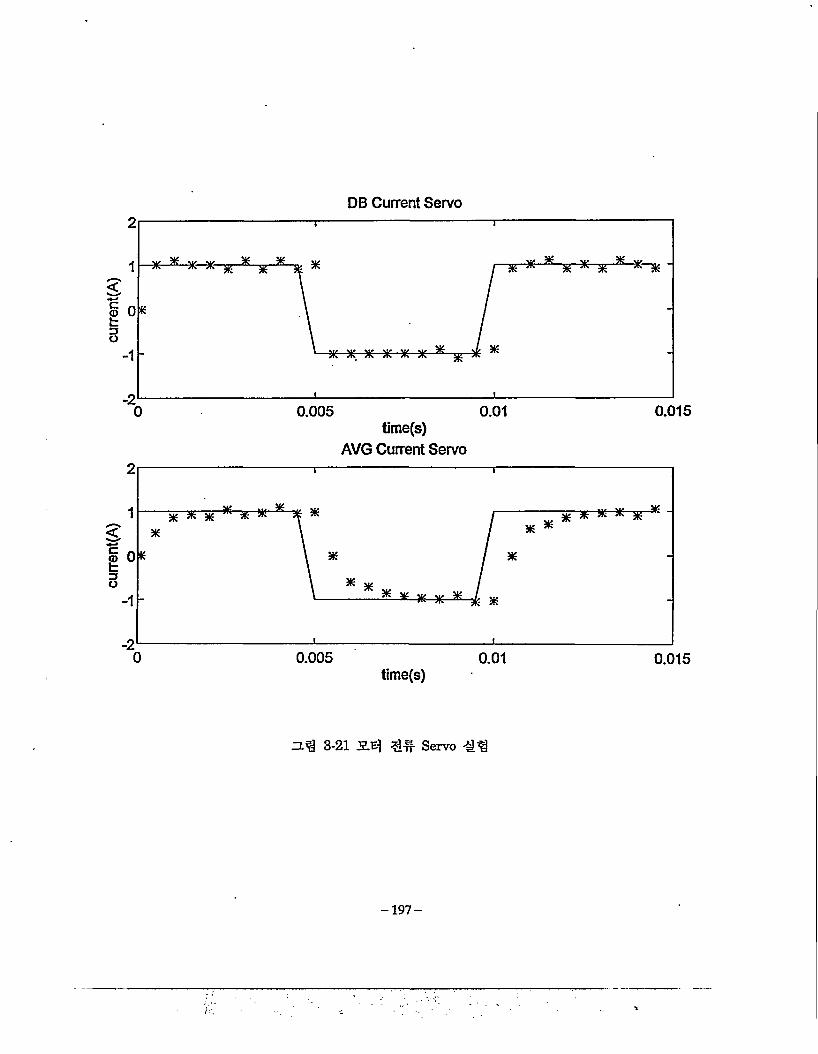
curr
ent(A
) cu
rren
t(A)
DB Current Servo
w y y y y w-7K——7R—7t>
0.0150.005time(s)
AVG Current Servo
0.005 0.015time(s)
3-21 S.t\ ^ Servo
-197-
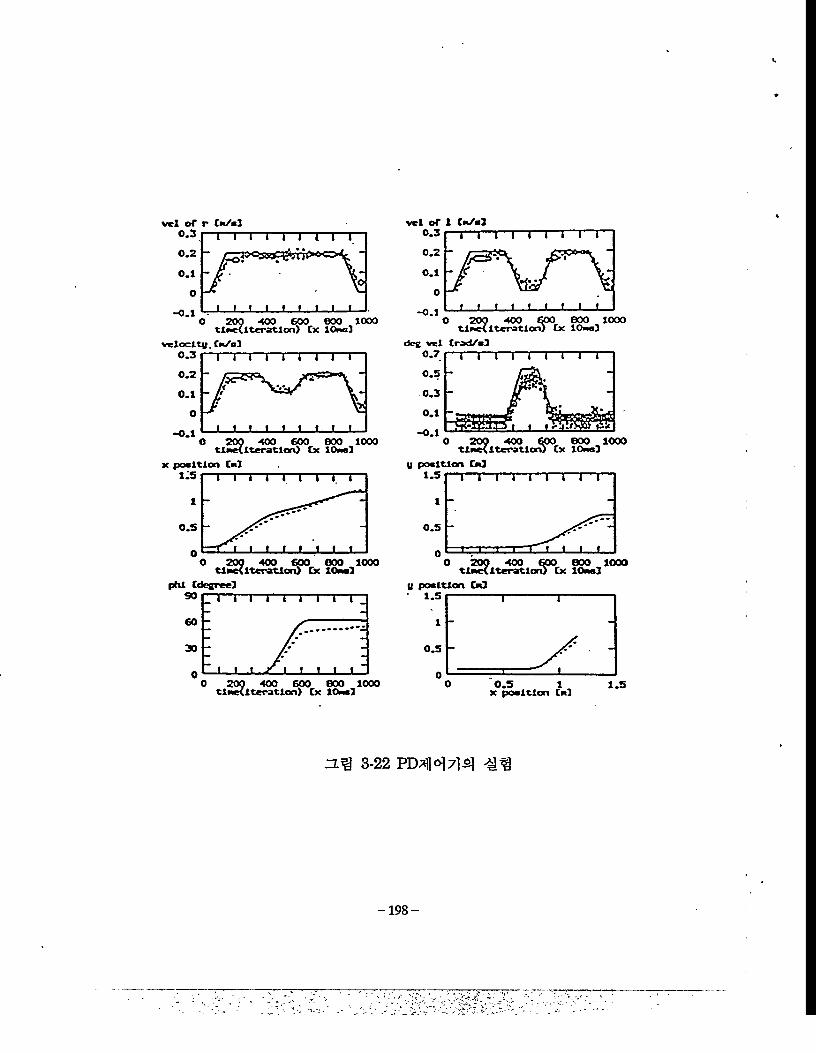
vel of r Cm/s3 vtl of 1 Cm/s3
3_1_LIteration) tx 1CW3
deg vel Crad/s3
U position Cm3
800,1000U position Cm3
Iteration) Cx 10me3
30 -
1000Iteration) Cx 10ms3 x position Cm3
zl^ 3-22 PDXIM7M
-198-

Ii
Hr
vel of r C*/s)
-0.1 —1—1—1------- 1------- 1—‘—1—'—1—0 200 -tOO 600 000 1000.timet Iteration) [x 10ms)
velocity Cm/o)
-0.1
t i r
800 1000Iteration) Cx IOm)phi tdegree)
30 -
1_1_I I »COO BOO 1000tlmctlteratlon) lx 10m)
vel of 1 Cm/#)
J_1_L1000time!Iteration) tx 10ms)
deg vel trad/s)
_L600 800 1000timetIteration) Cx 10ma)
V position Cm)
0.5 -
. timetIteration) Cx 10me)U position Cm)
0.5 -
x position Cm]
ZL%| 3-23 Computed torque PD*i] 7"|
-199-
^164 ## ^
# #941*1# 3## *}# 4# 3^4 914144 #
41 4#$14-.
9### 5.44 4144 $14*1 *7> hardware?} #3 ^4 41 #4 4"# 41
4# ## *113# feedforward current control## —5. I#ti#4l4 #44-
Deadjbeat ### 4# ti#4l4 M4 #7}## 4l###4. 4 #4] #33#
^f?}## 714 #4 §14 4 32# ### 4144 44 feedforward current control#
-44- ~tl4 # 9 $13. 4-n- feedback4 $14 444 4444 D/A conversion
time44 #4 4444 447} ?}#### 444 ?}# 4 $13.4 34 ### #
44 ##4 4 S444 444-44.
44 3#4 ^»s ## 4 934# 4444 447} $1444 # ^
47-14 zl # PWS### 444 5.44 93 # 91 W4 444-44. 4#
*}##35.4 ###44*1 44^4 §1444 4711 444 4*144-5. 44 44
444 5:4-5 44*14 €4. 4 ^4# 4-§-44. til *13# 4 *14 % #4
£ 414### 4-0-# 9 $1711 44. zl44 #4 ti## 44# 44 444#
4#^ 3#4 e?l# 4144# 4-0-44 #4-. 54 #"9 S til #4394 ti
1 PD4144# Overshoot?} e?#}44- 4*1 3*}?} 9?H#4 44-. 3:44 4#
1 5-#394 -9# Computed torque PD414?1# 4 -0-#4 91414# 91S#
4-t- Overshoot4* 4*1 3#?} 44 *}### # 9 $1$14. 5# heading angle
(do 4 34" 4*1 til-til 41444 4-9-7} PD414?14 uisfl 44-31## # 9 $1
4-.
99 4# 4-413# 41*1# 3#4 #titi4 ##ti4 4# ##7} #3#3
#41 *13^4*1# 444 #4141 4-4 41444 4#(gain)# ##444 4# #
4144 #1###4 44 #14 4# #9-5 #3#4.
— 200 —
SM 1144 14 11444 5.44 *1-1-3* f4!8WI 145^r 41
3—-S. $11 5Ll7> 3.B.S, Iha] 54444 14. 414 14 ^314 #5
41444 -2-1 ^-41$fe4 o] 5.^1- 4-43 34141 44- 111 5.
14- 14- t $1^. 45.ti-3 Hi 44 1 4e447> 7}l# 444. ml 4
11 45.4 41 €14- 4^814 3-S14 4 qx\ 4 #4 114 If* #4
4f44 1 1144.
-201-
%JL
[1] B.d.Novel, G.Bastin and G.Campion, "Modelling and Control of
Nonholonomic Wheeled Mobile Robots", IEEE Int. Conf. on Robotics
and Automation, 1991
[2] VME Bus System, The Electronic Science, 1987
[3] Inland Motor, "Basic PWM Servo-Amplifier Theory", Kollmorgen
Coorporation
[4] S.Iida and S.Yuta, "Feedforward Current Control Method using 2
Dimensional Table for DC Motor Software Servo System", IECON,
1988
[5] X.Yun and YYamamoto, "Internal Dynamics of a Wheeld Mobile
Robot", IROS, 1993
[6] ^
1994
[7] J.J.E.Slotine and W.Li, Applied Nonlinear Control, Prentice-Hall, 1991
[8] S.Iida and S.Yuta, "Control of Vehicle with Power Wheeled Steerings
Using Feedforward Dynamics Compensation", IECON, 1991
[9] ^ 4m KAIST
1993
[10] B.d.Novel, G.Bastin and G.Campion, "Dynamic Feedback
Linearization of Nonholonomic Wheeled Mobile Robots", IEEE Int.
Conf. on Robotics and Automation, 1992
[11] DC Motors Speed Controls Servo Systems, Electro-Craft Coorp., 1975
[12] Benjamin C.Kuo and Jacob Tal, "DC Motors and Control Systems",
-202-
SRL Publishoing Company, Champaign, Illinois
-203-
ti s.
1. VME 454 #3.
♦ 444 45
444- 454 a>o]^7> 8, 16, 32454 37}x) 4437} #54 45 4-54
4 44 #45 444 ^Ajo)] X|3# # &ti}. VME454fe 444 4#4 4-
45# #5# 4 37fl(LWORD*, DS1*, DSO*) $154, 4544# 4 XI
5# 4-8-44 4^11 4— 44^-44 444 ### 4-5 #^7} 4^ 4# *44
5#(454 5=4 I/O 1h4 #4 4545 §} E5* 44# 444# 7]##
7>44 &# 5#)4 #7]44. 4, 32454 444 4## 44 444# 4*
a>4z.4 VME5=44 P24 3444 D31-D16 4J:4# a>#4jl $1# 4^4
4 #4 4:9.7} 1A44-.
♦ 4545 45
4545 45 a}4^£ 1645, 2445., 3245-4 3##7} #54, 444
4#44 45 454*44 *445#5& 34 x}### A}#3# #! * #
4. VME454# 5 A23-A014 237114 4545 4-44- AGO 434 DSO
*, DSl*4-#4 #54, 16M 4-454 4545 ### 435 4-5 #4-. 444
454 3-9-4- 4-&7M3. ### 3-T-CP2# 3444 A31-A24#5# x}#)4#
3245 45454 44 4G4-454 4545 #3:# a) 35.4-# ^4 7}*44.1/05=1- 43# 4-#4 A23-A01# 3# 45= # 3.57} #5# VME454#
4545 A}4^# 7)34# #334 4344 #4. 4% 45-45 3444
(AM : Address Modify)3=5} #4## 67fl(AM5~AM0)4 35353 4 353
3-4 5=4 443 44 3#14 4545 347} #445-44 #434.
-'204-

0 ^e. o] c_5]] >:(ghort address) : A15~A01 64kti}*lE
© 3Lfjr 4 A5]] ^(standard address) : A23-A01 16M4*1-E
© S}# <3 A 31 ^(extended address) : A31~A01 4Gtij-o]jE
l/OSA #31#^- #E. #A3lA# 4431# AM2EI S4#4# 4#314
A15~A01# 4^A4*1 #3)4*1 #4 A23-A164- #4S # $14- A
M3Sfe 4 4 6)1 3)2.4 S.i>:4 4#a)]^(privilege access)3) #4 7}4
44* 7^12 #4-
♦ 31*14 4#
3)44 4#* til ^-7] *14#(inter lock) 44AS. 3)3144.
4A444 #31^lS. #44 3M4 4#* #AH #431 *714*1 4**14
* 4*1 444, #3l*lJMir*.S.#44 DTACK**J:3l 43)4 *1**144. 4,
#31*lA#314 DTACK*(#*1#±)# 41-44 ^ 4^4#^ 31444* 4
*1 ## #314 ##4(interlock).
*14# 4*# ** 4a#31 4 31 a 44(#444)*1 4# #314*7} 57H
S' 4* °17]## 314*1 #&44, A #31 *1* A## #314*3131A A##4
4*1431 3|*144#4 4*14# 4# * 4Ahs #314717} 414144- #* 4
44*1 #431 44 4A4#*1 314314 3)7144 ^A# 4a 444# 7l*ol
4#44 44. 31 a4 A#4 #44*1 44 4a3)as 4a47} 441 A#
44# 4# ## dtackv} 4#4 A4 &aas, #444 *(io~ioous#a)
44*1# 3147} 44 4#4*1#*1 #*#4.
♦ #44A4 4*
4A#31 431 20444 4A47} #71)4*1 A 44.
VME4A31## ti)dh 4ti)A314#(A4)31 #31# 4#431 #4*1 43)4
-205-
4^4 §1 CPUS-5.5. 31## ^ldh^^r 4# #
^r 44- 4 ## STDti^dh # #414 8131E CPU-g-4 4^4# 4# # ##4
4. 5. VHE^6)!## 4# 4dhBj40l eW3, y^l^E -§-4^)21
4## 4^4(44 ##5l)S 44711 ^r 44. 44^5. ##444 44^.4 4 #44 #4^4 #41 4#4s. #44 #414 44.
— 206 —
*il 5 § xfe xfloie o|gg g^x||a|7| gJ mg-
^1 1 « #4 rt ^41
i.
bbii g -a tia sas 7]#* m^^s. s.s_s7>
4*§*2-5 5#4^# 444 ### 5:# (Manufacturing Process) 4 4* 55#
$1 45 44544# 411:42.5 A]##*!*.# #444 $1# #5 #4, 44 #
A}, ## ## 5 ZL #57} #44 #*### ## 4444 $1# ^31*4 554a1
454# #44*2 $14. 555 7] #4 #7]4 ##4 7}# e 2-$l# #4545
^4 45 7]#4 #54 4 #4 7}## 5557} ## ^-3]# 7MJL3E
254 /^## # # $17)1 4 ^4 $14. s 555 7l#4 #4 7}# 7)H
(Automatic Control) #44 7]# 7] #5 ##44, #B)7} #44 #4# #7] 441 ### 44 #24### 5554 4# 444# 4 $14 4 $14.
## 4544 #tfl 44 4 #4 # #45- ‘44 4 4 (Intelligent Control)’
444 5#444 5557} 4## 7>45 $14:4# a>jis1-ji #4 44 #4 4#
*6* 7}7]je.# #4 457} ##44 #*342 $14*. 44-4144 44 #4*#4 4
44 44- 554 4-5711 4445 $14. 44 44# 44# 4# #4 5 K. s.
Fu4 ‘44 444 $15 ^(Artificial Intelligence)# 4*5 447} ### 4#’4
42 #44&2[l], Albus# ‘#54$! *354 #4# #4 44 5# 4## 44’
44*2- ##4$1 44# 442, 4542.5.4 ‘4# 4^#4 44# zz. 4^#4
#### #44*44 #4# #4# ### 4445 *354-4 4*4 44’44-2
#484[2]. 4=4:4 447} 447} $14# 44455 4# 444 #### ##
-207-
\
!Z

«H4 #47} 43443 4^43 33# #A4 iis. 314 #3 #4# #4# 7l ## 333# #4#A ZZ.3# #3) #3 344 444 3# 44)7} 43#44
ZL AAS ZZ. ##3 ##, tfl^^H 34# #4 #7)1 #3 434A 4## # $1
4- 43#. #4 43 413 3-EAS ###A $*3 #4 (Fuzzy) 413, #3 #S#
(Neural Network), 4# ^^(Evolutional Computation^# A# 4)3443 4
s33 #3# ##43, 47)4 ## W1 tfl# #-g-3, zi# 3# #4, ##
33 3-4- 7>4 # $}S-^- #A $1#. #7)# #711471 4# 413 ###4: 4^33 7]#4] 71-44- ### #s-i} 43 4714 $1 343 *4 4. #42. $)
4.43 444 9#41# # 33# 344 3.4 4# # 3# 33(Fault
Detection and Tolerance)# #3 444 433# 434 43# 43 SAS7}
3#4AS. 3# 433-71 434 44°> # €443 AA3#[3]. 34# 44 A
4# 3##4I 43443 3#4 4343 3### ##a 43 33 ### 3
34 33143, SAS3 344 A## 43 #44 S3 343 434 4# 3
4 43# 444 #as sss 4s# 444 zz.44 44 #34 ###341 4
414 #343 #41## #44-31 414# # 333 #4. AAS# #a# #3
(Robotic Fault Tolerance Algorithm)# #44471 #4143 34 AAS# *J3
#344 #3# # 33 34 7>4 zl# #4## 344-3 #3 #43as 3#
343 ##• a4a sss# #3, #34 #3, #3 #33 #3 3a# #a4
## 7fl##A 3341# # 33#. 4 #94143 #4 M salt aai 4
alAs #A, 3# 44 #3 ##34# a# ## #zl43# 7H##$!#.
2. 4# #3=
4-3434 44# A## A# 3#, 3# 3 #47} #4 3### aS4
3# 7114# A# #333 3 4# #3##. ##7}4s ## A3 A AS
-208-
(Multi-legged Robots)# u}*S °1 94* -3.5.3= (Wheeled Mobile Robot) 5.
4 9# *% #** *1*$ 94* zi ol^o] 4144. 44* 44# 4*4 4
#4 4*4 94 4A* 4*4 495.4 *%* #9*94 44 4*94 €4
#7] 4944. 444 4*44 5*3 3l3fe W4 *^44 44* 4444
4## * #* S5.SS4 47M 44, 44 44, *9 44, ^-4a 944 ^■ 4 as. #* 4*7} #4 #4[4]. 1 44 *4 4* %}*s* 7}* 44s. 4*4
* *44# 5*3 sss4 44 497} »144 #a, 444 M *4# #* 41
4 441-4 $4 *#*$14.44 5*3 S5S.7} *^* #441 44 4*9* 4471 4414* 44 44
4(foothold position)* 4*44 444 €4* *94 4* 44# 4*4# 4*
44 #4. 44 5.4 5.5.E.4 4# 4*4 *4* 9- 7}4 #444 #9-44 # 4. 44 &4 #9- 444* 44 44444 ass* 9*3 *47} 4*4as.
#94&4. **4*4 #9-44 4*# ^4 44 44 A94 m# 4*4* #
4 4*4(wave gaits) 4 4. #4 4*4* *#44 9*4 4* S*3 4*44 #
444, 44(regular) 44 4*4 #44 #4a 444 44# 4As 9#4&
4. 44 S*3 SSS4 44 #4 4*4* McGhee* Erank4 *44 4* 44
*&JL[5], Bessonov* Umnov* *4 4*47} #4 S*3 SSS* ^4 *H 4
4 #*44 A 4A #4 4#A(longitudinal stability margin)# *4*4* 4*
4#* **4#4[4]. **4* Song* Waldrono] 4*4 #9-4 4# 444*
44* A#4# *4 4*44 4*a# *444* 4 4*4*a 4##[6].
44 **44* *44 4*44 4* 9# *4, 4**4 **# 4* ##* 7M#o] 4 *oj ^44* 4*4 *4 4% 4*4*as* SSS7} 9
4# # 9 §14. 444 4*A *^ 4*4 *4* 9 #4 #4# *W 4# 44* #*4 #97} 4*s)^4. 9, ****** *9 *S7} 944 9 4*
S*3 SSS7} 71*7} #7}*# *## *4* 7}7l *44* 44# #*s 4*
-209-
# #4 4-5]31 444= ##7} %# 44# #4 41% 11 #4 !#%!%.
4%44% 44 444% ##%4 %44 4^1 41% 444## #*4 4# 444(free gaits) %31 ##%. %# 444 44% #4# Eugushev%
JaroshevsMj4 444 44-^3. 4#41%[7]. d#4 41% 4^% 4^44 #
4# 4 1# 4% S*3 SSS# %4 444(Adaptive gaits)# McGhee%
iswandMofl %44 11%1%[8]. 44 444 %4s 4^% 44 #44 s#
follow-the-leader(FTL) gaits[9], 1984% Hirose4 %44 41% 4444
adaptive gaits[10]# 44 7>7]7> 1%.
3. i# ifl4 ^ 1%#4 41% #44 1# 14 #*3 #31%#1-4 444^44£ ##%3i
%4 S*3 sss% ## %444 444 4 51# 3i# %4#4 4% 4% 11
#4 is. 1#44 11%. %4 S*3 sss #4444 3t%# 44 7>4
#s 144 141 # 1%. 14 #4 #4% 44% 14 !%4 %44(4: 1
4#% #1, 441% #4) 314-4 141 # 131, s.ss% 44 144 41,
%%% end-effector-4 314* # SSS 44] 4 31#-S 1^1 # 1%. Chiel##
#% 14 4SlCDistributed Neural Network)# %% SSS #*3 444S %
4%4 # 7>4 314- #41-4 444 ssh7> 4#1# 7>4s# %1%[H]. =l 4% 4 114 #4 %sl 44# 44%ss off-liness. 444# #44% %
%# 11# 4%3i 1%.
4 1#44# *8% 4^44% 4% M SSH.4 3.4- #4 #^ 131%#
(Fault Tolerant Locomotion Algorithm)# 7]] 1H%. 41 4% #*344
141 4 1# 1 7>4 314 %### 1%%31 zz.4% 31444 111 # 1#
H(Fault Detection Method)# ##%. S. 41 1447]- 4— #S% 31# ##
#4# 7}4# 7># H%7] %44 fault tolerant stability S/# #%%31 #%
-210-
3.SJM- 44 S/# 2.44 9*3# 44# 4" 44# 4# #44
4. zis{3. 4 44# 44-44 44 M 5.S.E.4 ^ 44 44 9^444 4 44 44-4 t1# 4#4.
24 <^14# 44 SM 3.515.4 3.14 4 4f44 4-444 -S.dh-g-1- 444
4. 41 3414# 4-4 M 5.S.E.4 44 9114 441 9 4# 44 7}4 jl
4 44## 4443. rz. 44## #444. ^43. 2144 2.4## 444# 4
1# 41444. 41 44414# 44 fault tolerant stability S/E- 444^, ill 5.
33.7} 3.4- 44#1 41 9 1# &4## 9443-3. 5444. zz.42. #4
5.1 3.SLE 44 914 3.4 44 4#1# #JL 2L 44* 4444. 4443.
s. 5# 1# 4 994414# 4971144 444 9944# #44.
-211-
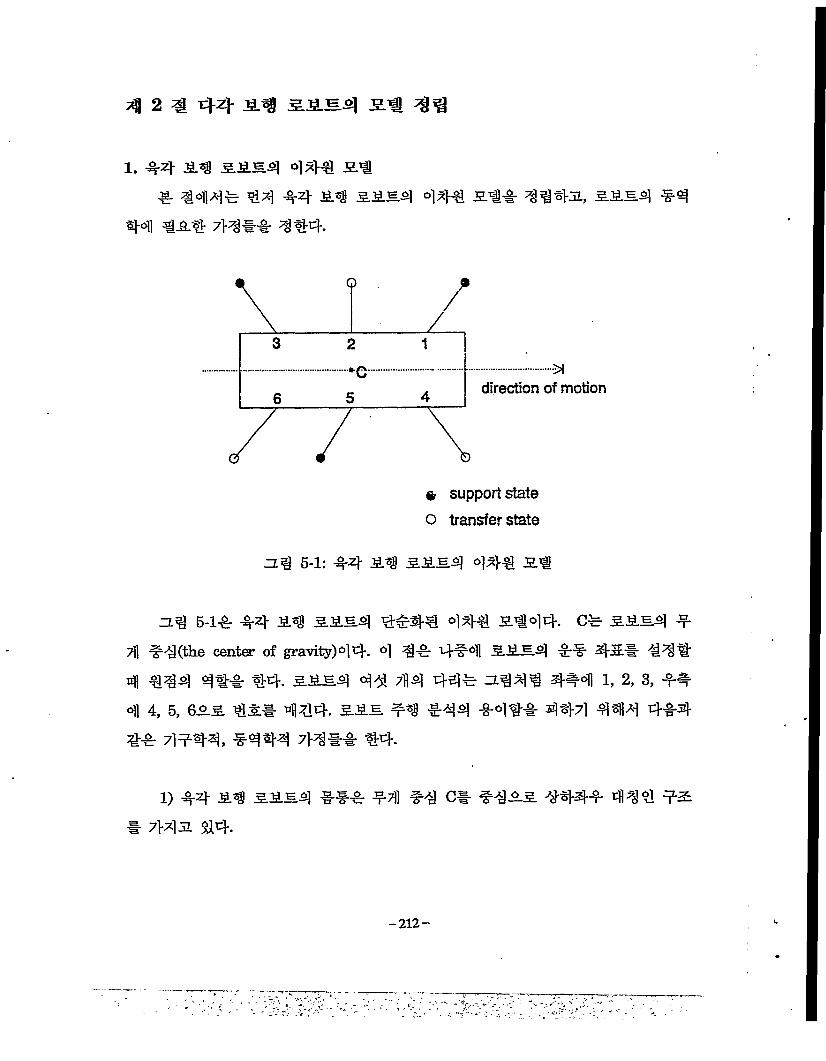
1. 4-4 21 2524 o]x>€ 5-SSr 9149 49 4-4 21 2524 94€ 2-14- 9143, 5524 #1
44 €29 7>1#4 444
direction of motion
« support state
O transfer state
3^ 5-1: 44 2.1 2524 S-l
3.1 5-14 44 21 2524 4444 °19€ s€°14. C9 2224 4
7]1 44(the center of gravity)°14- °1 94 441 2224 44 4"2# 44#
4 €44 4#ir #4. 2224 43 ;H4 444 3949 444 1, 2, 3, 4#
41 4, 5, 625. €2# 194. 225 41 €-44 444* 44-71 414 4-B-4
€4 7lf#4, 4444 7M#& #4.
1) 44 21 5224 #49 97)1 94 C# 9425 9444 444 92
# 7M3 14.
-212-

2) SIE 4^ *1*1 14 *14# 1 l#(point contact)# 4 #3 #4.
3) 335 444- *14 144# 444 43445 $4.
4) 4 444 #7l]7} #41 #7114 44 4# 7>^4ai 7M14 44# #3.
4H4 148H4 #711 #14 #44 #711 #44 4*144.
5) 4 447} 44# # $1# 7}## 44 4 4(reachable cell)# 444^4
4.
6) #47} 4 #41 rflyfl 44 #1# #444.
• 7) 4# M# 443. 7}114 #44 4# #434 #44# 3.444 #
8) #414 4# W4 #44 34.
9) #*J# 4444 44 3354 441-4 444# 144, &4.10) 4-41 a. 4#44 344 #444 &# 4 335 ^4 o]i ^5# 4
443 444 dh-^(swing)£. #44 #35. 44.
4 7}4# #4 44 7}# 44 4 4(reachable cell)# 444 #4 4444
441 444.
2. #4 14
44 3*3 5.354 1#4 4## 4414# 3354 4#44 #444 1
4# 4*4# 4# #4#4 44 14444 44. # 4#44# [12]44 4 1
14 4# 4#4 #4# 4-8-44.
14 1: 4 447} 4# 44 (transfer phase)4 ### zz. 444 44 *14
33#4 144 1# 144 ### 4444. 4 447} *1*1 14(support
phase)4 ### zl 444 44 *144 14 1# 144 ### 4444. 34,
-213-
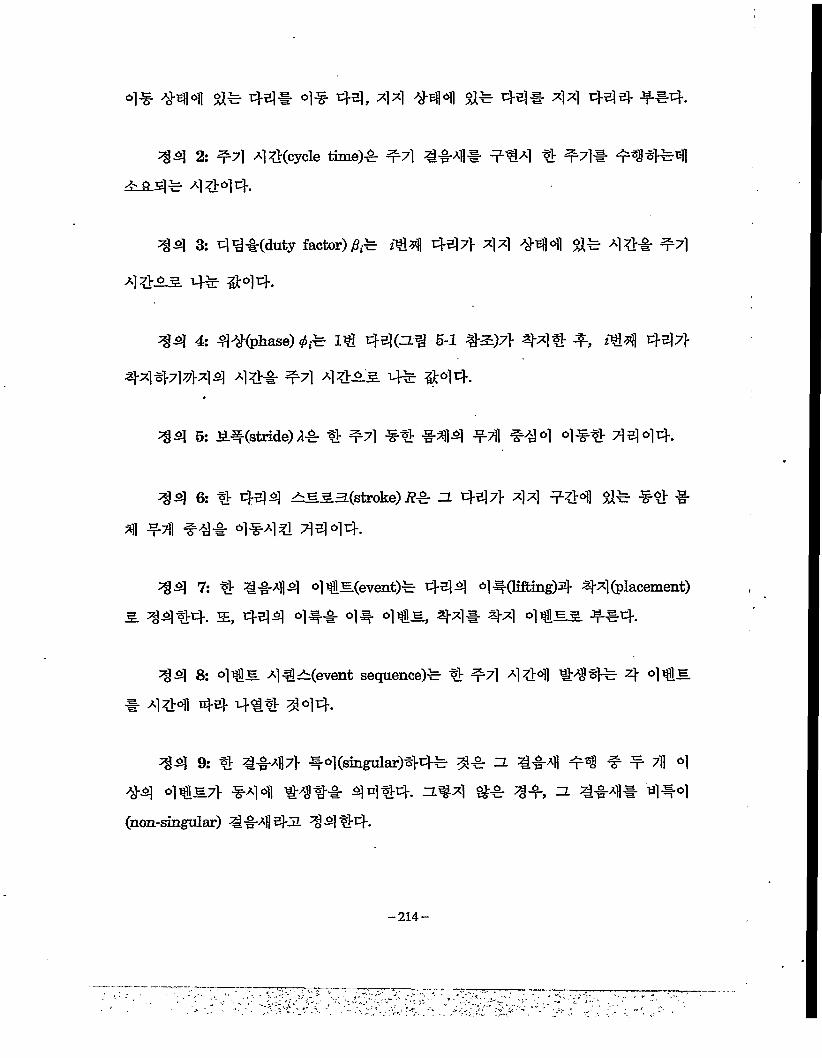
4# ^41 &# 44# 4# 44, 44 44H1 &# 44# 44 444 ##4.
44 2: #4 44(cycle time)# #4 ##4|«- ##4 4 #4# 4^8 4#4
AA4# 4444-
44 3: 44ir(duty factor)&# z#*fl 447> 44 44M1 $1# 44# #7]
4 4As. 4# 444.
44 4: 44(phase) ^,# 14 44(a# 5-1 #5)7} 4*4# 4s Z'44 447>
4444444 44# #4 44as 4# 444.
44 5: A#(stride)A# 4 #4 #4 #44 #4 #44 4#4 4444.
44 6: # 444 AS3.H(stroke)i?# ZL 447> 44 #44 4# ## #
4 #7fl #4# 4#44 4444.
44 7:# ##44 4 #A(event)# 444 °l#(liffcing)4 44(placement)
s 4 4 #4. a, 444 4## 4# 4 to, 44# 44 4tos. ##4.
44 8: 4#A 4#A(event sequence)# # #7] 444 #44# 4 4#S.
# 444 44- 4## 444.
44 9: # ##47} #4(singular)44# 4# A ##4 #*| # # 7fl 4
4-4 4fc7} #44 #44# 4444. A#4 ## 4#, zl ##4# 4#4
(non-singular) ##44"A 4444-
-214-

44 10: 44 4#4 (regular gait) 4 5# 444 44#4 ## ##444.
44 11: tfl^j 4-§-Afl(symmetric gait)# 5.5.5. 4*3 44# #5.5 44 4
4## 4#4 ## 44#5. 4## 4, a# 4## 44 4MI4 4444 0.5 4
#4 444-7} #44# 4#444.
44 12: 44# 4#44 555 4*3 4## #55 44 441# 4-44
## 4415. ### 4, 4 #4 444 441 44 4447} 2.# 4# 4#4
44.
44 13: 4 447} 44# # 8# 44# 447} #44 #4$}# 444
44 4444- 5-24 4# #41 5.444. zz.44 4 zl^4 #4 4# 4
414 44 7}## 444 45. 444 # 44 44 4#4 #4##44# # $14. zz.^ 447}# 444 44# 11# # 444 44 44# 4
4 8 <9 554 4 14# 4144 #4. # 4144# zz.4 5-34444 4 44
4 44-ZM4 44 7}# #4 44(reachable ceU)# 4444 14# 444 8
5# 484.
44 14: 44 44"^(support pattern)# #44 #4 4 444 444# #
444 # 4 41# 144# 4# ## 444(convex hull)# 1#4.
44 15: #4 4Instability margin) Sro# #44 #4 ### 44 444
4 #444. # #444 44 4444 #1 4-44 44 # 454# 4#4(zl
4 5-4 #1).
-215-
44 16: a]]5. 44 4-rr5L(longitudinal stability margin) S/9 -§-A]]S] 97)!
#4# 44 44-441 #444 # #444 #44 4# 44= # 44144 #4
43m 4-44 44 # 4# %# #44(zi^ 5-5 #2).
44 17: 44 z’4 719-44 #41 (kinematic limit) Jf,-9 44 *4 #4 444
*H14 #4 4# 444 44 444 &9 reachable ce!14 444 44# 444
(ZL^I 5-6 4"2l). 45 71944 44(kinematic limit) Km-£r 5.9 444 71944
44 4 44:4 4# 444.
44 18: Sro>0 4 43 44" 5*3 555.7} 4 4 ^^(statistically) #4 (stable)
4431 44. 4 #31 #44 #444 44 44-44 4#41 $1# 4 444431
444. zi#4 94 4#0ill# #44(unstable)443i #44.
-216-
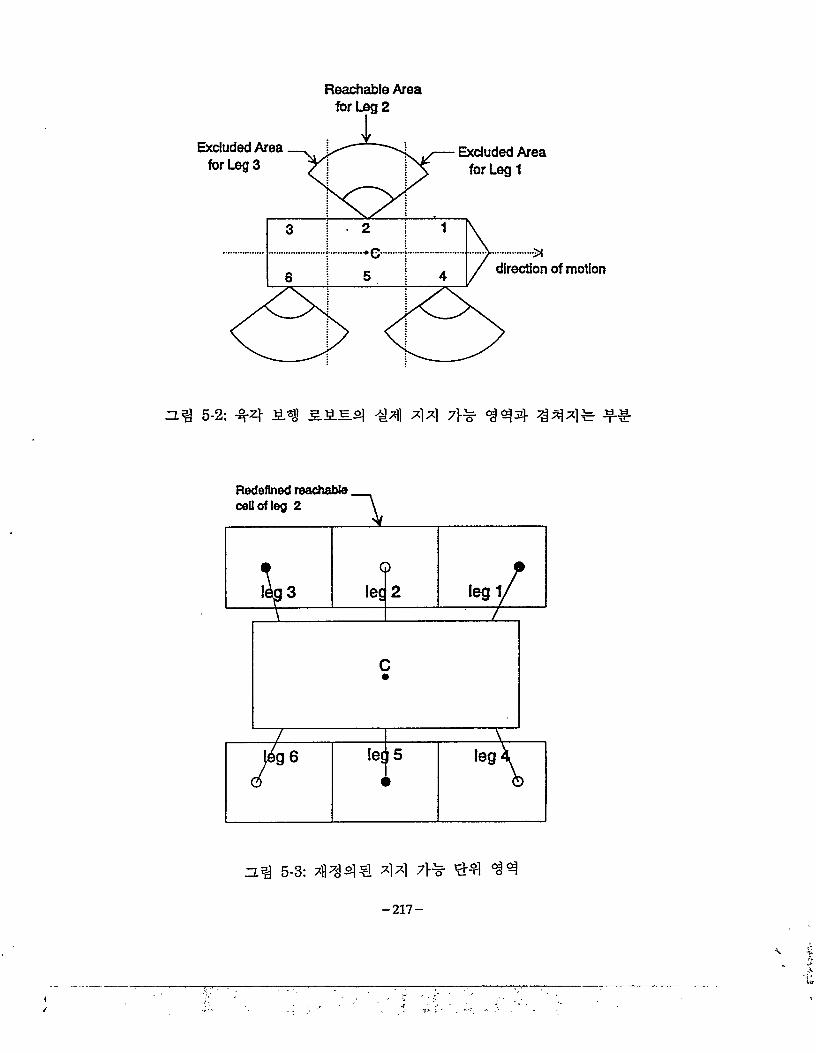
Reachable Area for Leg 2
Excluded Area for Leg 3
Excluded Areafor Leg 1
direction of motion
=L% 5-2: 44 M a]X| 7>^ <3^4 ^44^
Redefined reachable cell of leg 2
5-3: 4444 44 4~£ 44 ^4
-217-

Support Pattern
Sm = Minimum of d1, d2 and d3
ZL^ 5-4: 4-n- *V-fj-£.(Stability margin)
n.%l 5-5: 45. <^-n-5(Longitudinal stability margin)
-218-

»
Km = Minimum of Ki, Ka and Ks
ZL^l 5-6: 7l:rL'S]--5j (Kinematic limit)
1
..............^Body Motion
-219-

vtfl 3
4 46)1 43 SM 5.S.S.S] 4^ir 44 7i4 34 #4 34 s &4#2.43 7>4 #3 7}#3 2.4 4-3## a ZL A}3#3 333 4 $1#33* 4 4:44.
1. 44 M 5.S.S4 #43 &3
3 34 44 3444 #4# 3 34# 44 441, &# 44 34# 7>33
jl 343$3. *# 447> 343# 44, s# #4 #4# 444 34# 44
# 347} ##4# 44444 4444 34 ^43 #4 34# 3-444 &7l
s. 44. 44-4 444 44 344 ^4 0# Jf-44-3 4# 344 l* #44-3
4-4#4 34# 43 4444-3 1x6 vectorgs. &33 # 34-. #4# 4-4
34 330# 4--B-4- 34 3434-.
Q — {q : g=(sls s2, s3, s4, s5, s6), s^{0, 1» (5.1)
4 4, s,# 4-4 z4 :34# 334-. 344 34# 435.4 334 444
333. 3 14 344 334 4-4# 4354 33# 3#3 34 3433.
E = {uit dit m: i= 1, 2, .... 6} (5.2)
4 3444 3# 34 %4 34 43s# 7}44^ «,-# 4# 43s.# 7>4
33. 33544 4s.# 43s w4 344^#4 4 43s.# #44 4## 4
-220-

4 #4. 4fe nt*\ MM* 44* 444 444 4*€ 444 M4 *4 *€ 444 44* 7>4555 4*54 4 44s. 44# 444. 44 *4 431 444* 4314 44 &4# 4 €4.
44 7H 44 €414 431 4445. €4 4^441 &4# 4 514.
2. 314 44 44 (Fault Detection Profile)
44 M 5554 ^ 4€4M* 4si 7>4 314 A>;*i-4 444: 4 $1
4. 444 44*4 MM4* €455.* **8 #44 #44 €45. 5554 4
47> 44# * &* 4€4 €4-4 31 €* 4*4i €44 555 314 5#
55 €4 31*4 €45 4# * 514 5554 41441 €4*5 €#4 ^7]*
2.4*5* 4*4 €* 4*4 514: 555 441 €44 44, 444
end-effector-4 54, 414 7] (controller)4 end-effector44' *44 *4, 41471 4
414 54, 444 41 € 4*1*3 €4 5 **3 4^4Mi 5* A]4(time delay)...
* €*414* 4*4 4* * 7>4 54 4€*4 444 4* *41** 4
*4.
1) 444 71*44 **4 54
2) 4H714 444 effector A>c.]e] *44 *4
1)4 44* 444 7]*44 **(41: lift motor) € 544 44 5 447} 4
€4 44 44* *4* * §1* 4*44 2)4 4-4* 41444 44* *44*
-221-
effector^ #H4 #444 S4# 2444. 14 2)4 A>^o] IS 141 2
45]# 414714 IS# 14 5-4-J2.5. 4 41 ### 1 #7} S44 24-4 2 47]7] 444# 2l a>^o] IS 4-7] 444 4-44- 445. 314 44 444 4 4. 1 49-444 1)4 444 44 #14 1SS# 45# /,-42 544-2., 2)4
44 °1 44 #14 1:4 Sir 45# A.-4-2 5444.
444 144 1), 2) A>4i-oi 444 #4 444 13]# 42s. 2 A}4# 4 1SS4# 4# 1 5 S3] 5# 41144. #, 41 447} 4444 41, s# 44# 54#4 5.42 44 1# 44144 131# 7>41 244 14S 42 141 5 S4. 14 fp\ 144# 4-r# 145a}. 44 i?\ 44 13)4
S# 4 fp\ 1SS42 7}441, 45] z# 4fe m,7> 1444 1S&315 #
9-42 441 44 13]# 541 5 S3] 44. 4, 44 z7> 44 1314 Sir
31 /,-7> IS Si- 314 13] 144# 53)5 14.
/.s,-: 0 —^ 1. (5.4)
45] z‘4 131 147} 4# 13]41 24- A}4 /,4 IS# 4S5 m,-7> 4
4 #1 71-3147] 444# 1 5 &4. 4 4to %,-3]2 #542 44 z» 44
13] 5 141 5 S# 313] y^7> 1414# 4ir 1 5 S4.
5,-: 1 —1, when /,- occurs. @-5)
-222-
M 24 228: s,- = 1, # 44 i7l 22 444 $1# 4 m #22#
44 til*44. V> #22# 4 44 fe zt 447} #4 4444 #22 24
44 44 2te 44 m/4 #4 44 44# #3-42 ## 4 *4* 44 *4
34 24# 4## * $14. 2.4 44 A,4 44 44 *4 44 444# 444
24.
% :
5; :
1
0u*> 0 when hi occurs.
(5.6)
44 M s.S.5.4 #444 3-4 44 €4# 4#4 24.
3.4 24 44 (Fault Detection Profile): 44 M S.M4 3.4 424 *4 fl 44 424 447} 444 44714 2fc7} 24 S# 4 7}44 2 4444 44 44# ti.22 *S# 4 2224- '
-223-
^8 4 4 ^ ^
l. #*il 41Sr l^A^ £ 4^4 2-4 A}#4- ZL A>y#i; #44^ 41##-
4425. 4-4 24 3.25.4 44 AM 44 S79MH4 2.4 44- ^*3 #4-4#
711444. #4# 4-44-tII 4-71 444 24 #4 4441 4% 44-4 44 7}4
# 44.
1) 4-4 5*3 siir 44 4%44 4# ##4 44.
2) #Aj] 4-4 4 44 244 #444-
3) M- 44°114 #44 4#3. 2.4 A>4o] 4<H4 t 214.
4) 24# #44 4## #*3# #4 444 #f44 #44.
4 #44 #4# 3.4 #4 44 4 44 z4 44 44# 4 V> #44 4-r-
4xr zl 44# 4# 44 444 4#4 #4 44. #44 447} 4#4 4:44
Ai #44 44- 4-##hs. %4 ^ 4#4# 44-7} 44 4 44-1 4
#4 44°14. 44-4 4- #9-414^ zl44 444 444-2. 4444s. 44. 4
4-## 4442# 2.4- a}# ^4 444 44# 2# 44 441 #25 2.4 #4
#41# 4 447} 44 #4# 7}# 4" ##4442 4*3# 4## 4= ## #-§-
4# #2# #s. 4144.
2. A}4" #-§-41 (Quadruped Gait)
44 5*3 Ilir +X 44 4425. 44442 7}4 44. #4 7}4 1) ~
4)44 44# 444 44 45.4 442 #4# fault Stability margin4 444
4.
-224-

44 fault stability margin : 44 3*3 233 4^11 #4 fault tolerant
stability S,# <?4 *1*1 M 44# # # 44# 4# 4412 45 44 #44
^•44 4:4 4-rr3(stability margin)# # ^4i4;014.
#4 3*3 2324 2.# 5d)l 44*1 5/ < 5W4 4# *>444. Sy# 44
3*3 2324 *1*1 44 447} jl44 444 4°14 *1*1 44# 4*1# 4 81
711 4## #H13 #444t11 44 #3 3*3# 7114# 5 $144#, 2324 #
7H #44 *143. ## 4*114 #4344. Sz4 444143 4 4 4#°1 fault
tolerant stability# ^1## 41 °1# 4441 $1# 44# 3444 ##4- 44#
#7H4 44 #43# 4441# *1*1 441M1 4# 444 44# 3444 #*1
41 #44- fault tolerant stability4 Tfl^# 7}*l3 JL# 4# ##M1 ?1#4 4#
4#4 44# ##4.
44 5JL : 44 2*3 5.32.7} ^*3*1 5i4 444 4t11§H #444# 44 ^
*3 4444 Sf ^ 0 444 #4.
44 44# ti144 *14 34443 #3:44. fault tolerant stability*} 4
#7} 4# 4# #7l 4#14 4-4 3*3 233# ^*3 #4 44# #4 4#4
(Tripod Gaits)2 7}# 4 §14. #4 4441# #3# Sy < 0 °l7l 41 #4 4. 4
44 444 34 44 ^*3 44-711# 4*1 4#14 #4# fault tolerant stability
# 0 4433 4*14# 4-4 44-4 (Quadruped Gait) 4 4 e#14# *1# #43
44 #4.
-225-

zz.g 5-7-gr 4 444 44 7}# 44 344 ^=434 ZZ. 34 #4 #4#
(rear, middle, front point)##- 54# 44 A- 444 Zl3" ## A}z} ##^7}
#7H#4# 4# 414 445 14441 34.
44 5.2 : 4-4 M 3.554 d\$ 71)4 444 42- 4444 zLf] 5-84 (a)4
442 47}. fault stability margin# 0 44-5.5. 4# 444 j%4 44 A}z} A #41# ZL^ 5-84 to ZZ. A]4 44# ZLfj 5-94 to.
1 4 : 42 44 44°ll A-j fault stability margin# 0 4#25. #4444 4
# 7}## 4414 2## (44 1, 44 6), (44 2, 44 5), (44 3, 44 4)4
4. 4 2## #44 (44 1, 44 6)# 525 #44 44441 44a-] (44 3,
44 4)4 13# "944 414 #3# ## 444. 444 (44 3, 44 4)4
(44 2, 44 5)4 2# #4 44# 42 4# 4412 #4^4= #4- 444#
44 34 44 47} 4M44. 4 2#4 4M4 4#1 #4 5-3 44 1444. 4 4 34 44 47} 7}# # .&# 44 2#(maximum stride length)#, 42 a]7]4
4 middle foothold point425(ZZ.f) 5-7), ZZ.fl 5-8 (c)4444 yP44. Z%4
5-8 (c)*41 a-] Sz ;> 0# #44^Ai 44 24 44 5# 141444. zz.fj 5-8 (d)4
4 #711 #14 A5 4144 #4. 4 41 fault stability margin# 025 #41
#4 (marginal stability^} 44. 44 24 44 5# ZLf] 5-8 (i)44 front end
foothold position^ 4444 #4# 3:4 ##4 4#7>45 44 14 44 6#
141471 43M #711 111 ZL^ 5-8 (g)4 £5 41444 #4. 44425
44 14 44 64 ZZ.f) 5-8 (i)4 front end foothold positional 4^143 #4 2
*3 525# # #44 5^1 #4711 44. zz.fl 5-84 2# 414 4 A1 ^ 0
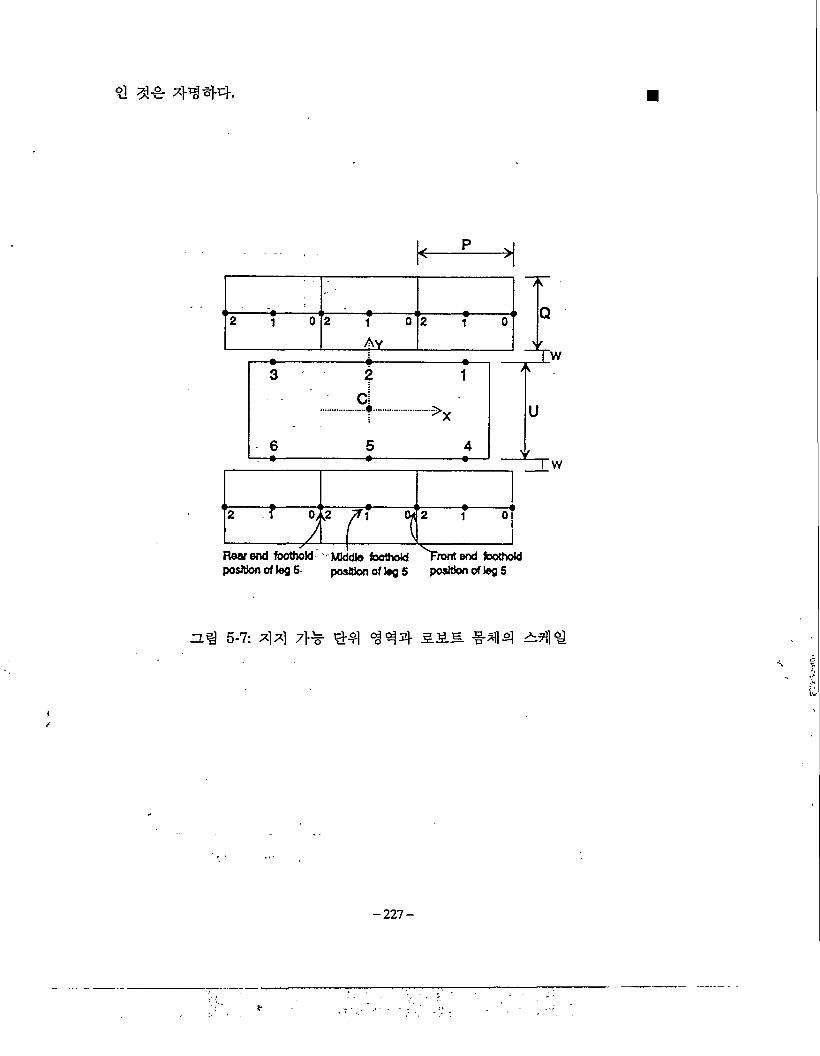
h—-—H, ■ -« ' , 1 ' • 12 1 0 2 1 0
Ay
2 T o'
2 “? ol <2 ?r* ^
r w
01
position of leg 5 position of leg 5 position of leg 5
ZL^ 5-7: ^ ^^4 5.S.H s-sfls]
f/
-227-

leg 3 ,teg2 leg1
#
Ieg6 'teg 5 teg 4
(a) Initial State (b) Lift Ieg3, Ieg4
(c) Place legs, Ieg4 (d) Move Body
teg2 leg 1
(e) Lift leg 2, teg 5 (I) Place teg 2, teg S
-228-
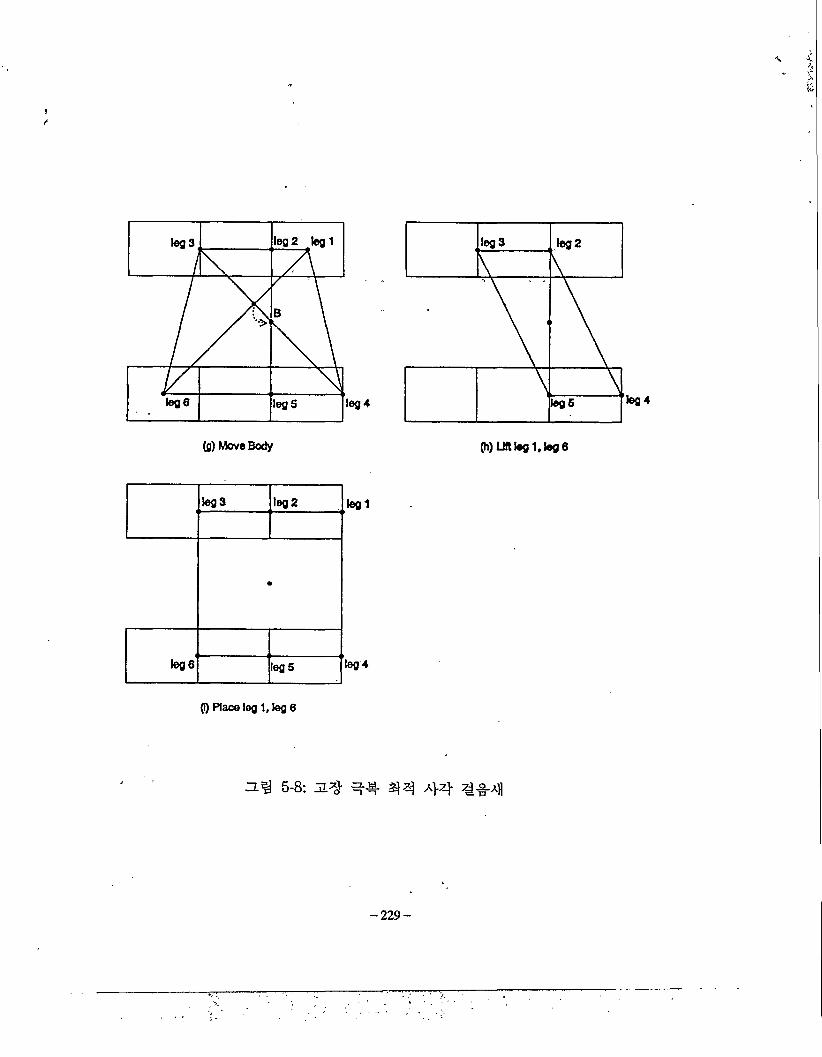
If
leg 2 teg 1
(g) Move Body
legs leg 2
•
Ieg6 leg 5
Ieg1
Ieg4
(i) Place leg 1, leg 6
3.% 5-8: 5L% q-s- a>z^ 4^.AH
-229-
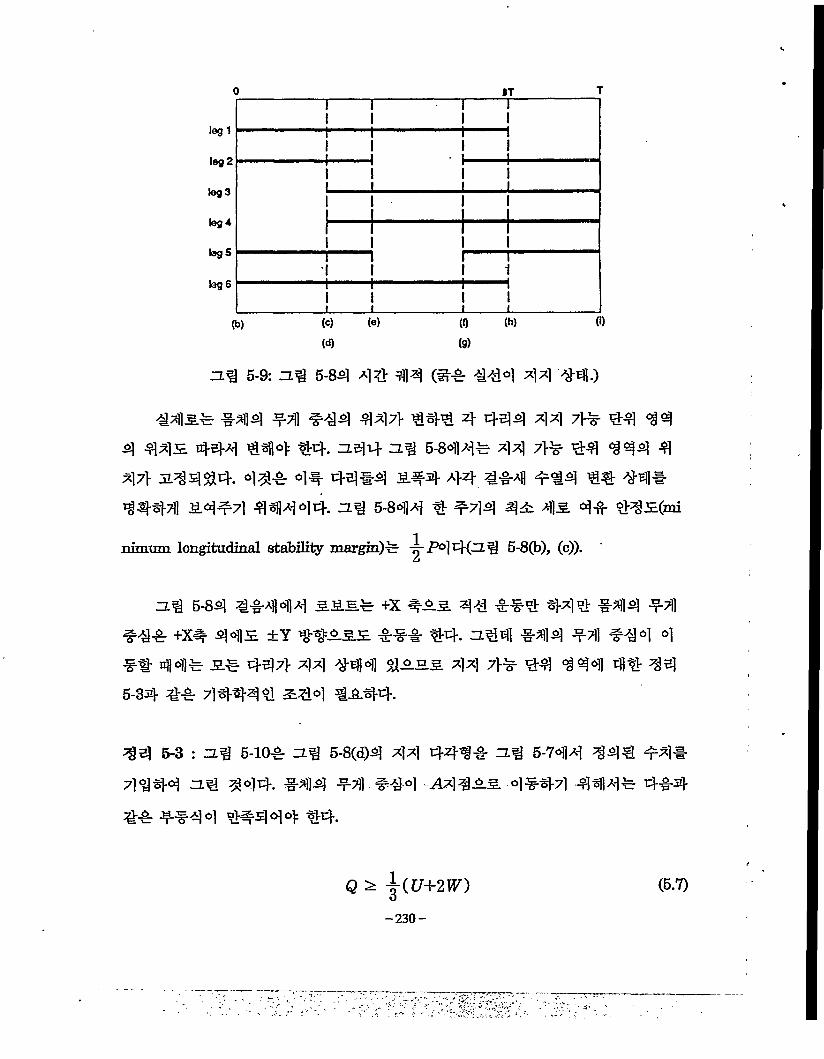
0 IT T
leg 1
leg 2
log 3
Ieg4
bgS
teg6
(b) (c) (e) (0 (h) (0
(d) (9)
31 5-9: 3^ 5-84 44 414 (% #44 44 M.)
#705.# #44 #4 #44 447> 848 4* 444 44 4# 44 44
4 44s. 444 44°> 44. 344 34 5-844# 44 7}# 44 444 4
47} 34484. 44# 4# 44 #4 5#4 44 444] #44 44 44#
444-tI] &4#7] 4*11444. 34 6-84)4 # #44 45 41s. 4# 845(mi
nimum longitudinal stability margin)# -^-jP44(34 5-8(b), (c)).
34 5-84 ##444 5.5.5# +X fAs. 44 ##4 4-714 #7114 -¥->11
#4# +X# 445 ±Y ##555 ### 44. 344 #7114 #711 #44 4
## 414# 5# 447} 44 4-1=041 8555. 44 7># 44 444 44 44
5-84 4# 714448 544 #544.
44 5-3 : 34 5-10# 34 5-8(d)4 44 44% 35] 5-744 444 #4#
4844 3?1 444. #7)14 #7)] ##4 44455 4#44 4*114# 4#4
4# ¥#44 44444 44.
__________________________ ______ _____________ ______
Q :> -|-07+2^) (5.7)
-230-
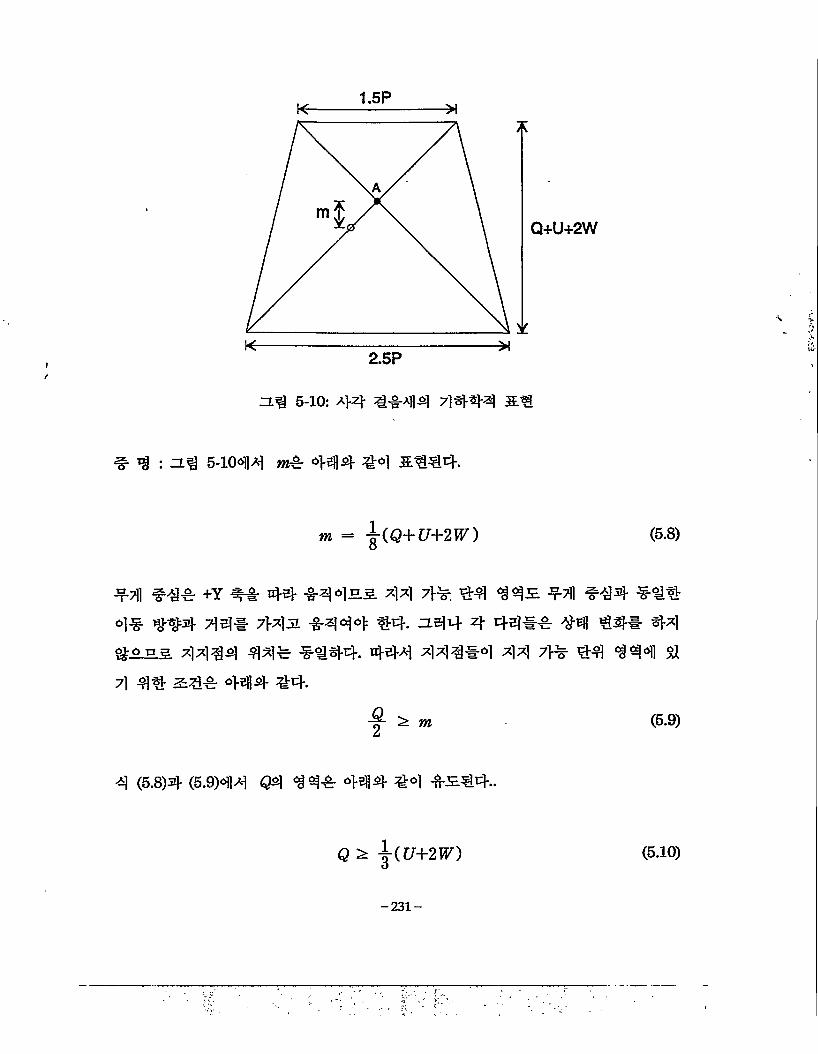
I/
=L% 5-10: A>Z}- 71*44 j£^
# 4 : 5-1044 4414 *4 1M.
\
m = -|(Q+t7+2r) (5.8)
*4 *4* +Y #* 44 *445.5. 44 7}* 44 *43 *t11 **4 ^-44
4* W4 44* 4-43. *444= 44. 344 4 44** *4* 44
&3E.5. 4444 44* **44. 444 444*4 44 4* 44 *44 *
?1 4# 34* 444 *4.
■f > m (5.9)
4 (5.8)4 (5.9)414 04 *4* 4414 *4 *344-
0 ^ -|(L7+2IF) (5.10)
-231-
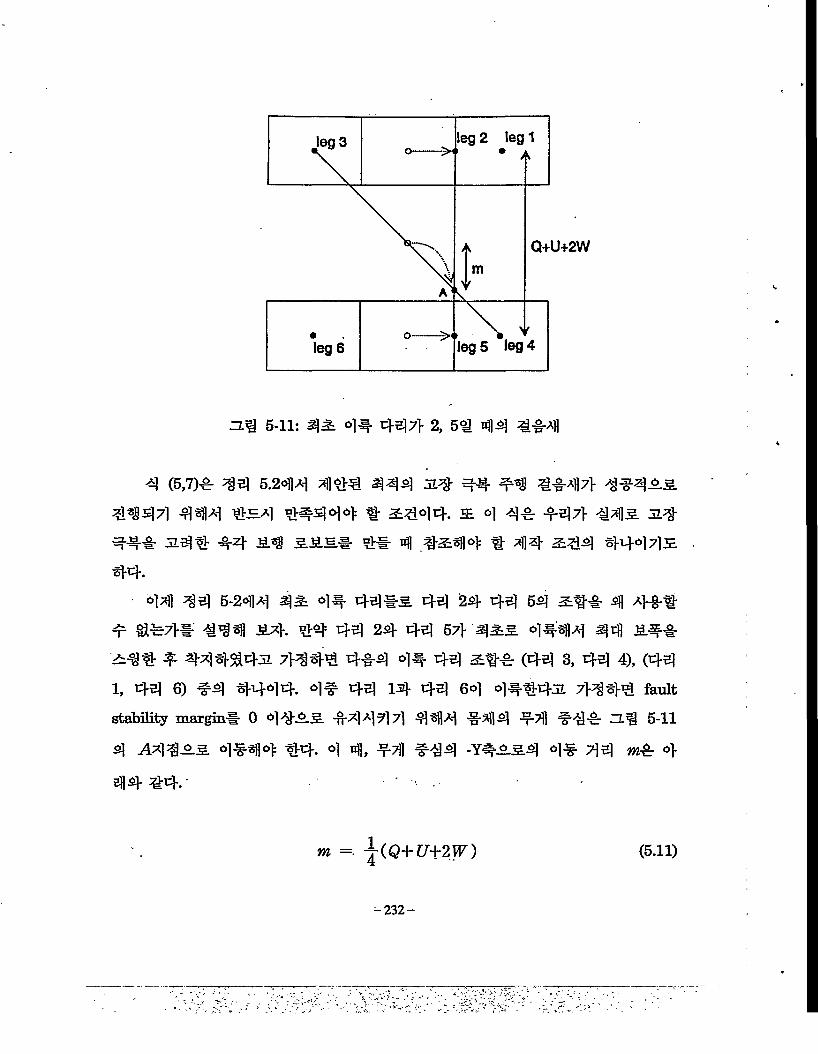
leg 2 leg 1
Q+U+2W
leg 5 leg 4
=L% 5-11: 45 u}b}7} 2, 5# *114
4 (5,7)5 #4 5.2414 444 444 5# 4-4- 5^ #4-47} ###55
3M5|7l #5.4 ##5|4<5]: # 5444. 5 d] 4# #7)15 31#
44-4: 374# 4-4- 5*3 siEt ## 41 #2:414 # 41# 544 444715.
44.
441 #4 5-2<>)l4 42: 44- 44#5 44 24 44 54 5## 41 4-0-# 5 §157}# #441 54. #4 44 24 44 57} 44414 44 5##
5 444S431 7}# 4# 4-B-4 44 44 &#-# (44 3, 44 4), (44
l, 44 6) #4 4444. 4# 44 14 44 64 444431 7}# 4# faultstability margin# 0 4#55 #44471 4M4 444 54 #4# ZLf] 5-11
4 .44#55 4544 44. 4 41, 54 544 -Y#554 45 44 w# 4-
44 #4.
w =• j(Q+U+2W) (5.11)
-232-
4 (5.9)o]]A1 ti}-5] o] 444°1 44 7>^ 44 #4$l7] 4% 7]#W ^-8r 44-4 44 -fi-:E44.
0 ^ C7+2P7 (5.12)
4 (5.12)4 (5.7)4- ti]H5flM (5.12)44 4 44444^ 44- ^34 # ^$14. 4 44 7>^ 44 44 04 ^4-4 ^o. ^ yjjq. ^0> zi4 5-84 374- =-
4 4w4* 7>4 ^ #4. 44-4 4^-44 2:44 44 3-244 (44 3,44 4)1Z 47> 4 4444 44 44 4-B4M4.
-233-
a* 5 # TgLoj jjig
i. *3 *3
& 34 2.4 3341 44 7}3* # 4, 4-4 M 5.S.E.4 *343 * 2. 4 444 4 4 44 33*45 7}34£4. 5455. 44 53 a5541 53* 444 M44 zL 4*4 M44^ 2.44 2.44 357} ^4. 444 44
53 555* 3.4 44 M *41* 444 *3* 4414 44 3*3 (Tripod gait)!- 7>4 444. 4- 44 5.4 334171* 44 53 5557} 3 444 45. 4 44 4445 *3* 447} 53 444 33 M* 3*41* 44 444a * 3* 4*34* 44- 4444: 44 4444 34* Lee [13]7> 454 44 53 5554 44 444 444 4*34. [13]41* 444 4a 44 7Hke. 44
4# 444 44 444*4 *54&4-. 544- # 444 4=54 4*- 4444 5554 4s] 444 544 f# 3*455 4444 44 44444 4 4 4# 34* 53 344-. 534 444 ^lr 44 53 5554 5341 4
44 4 3* 4711 4-4 ** 44 ?%7} 44. 444 4444 44 4447} 37% 4 4-44 53*4 444 7}4^i 44~o]4 34* 7}4* 44 44, 4 44 4444714 * 447} 7]4 444 44 444 44* 444 *444 44 3 44.
* 4414* * 7>4 54 7}4*41 43 53- 4-4 4*7%# #54-34-. * 4 53 5554 4444 444 4-4 3, 4, 641 534 f^St 4** 4-4 141
54-4 #4* 3*4- 34-7} 4*# 345, 4-4 541 534 375* 3** 4-4
241 53-4 #3* 3*4- *33 344 34* 53 344-. 4-471 3 £*4171
* 4-4 14- 4-4 241 534 33S* 3*41 43 34-* 534-
-234-
2. 44 141 5#4 #4M# 3#53 5-123 44 141 3-%°] W8S-S- 3#4 44-4#42. 53 5-134: 5
^ 5-12# 44 414-5-5. 444 444. (a)414 # 41 $134 44 l# 4 4#
44 4-4# 44# 47> $44 5*341 #444 #44.zz.3 5-124 ##4# #4*11 54 #4 5*3 555# # 4414 4 #4 a.
# 44 44 4445 5*3# 447} 43 141 5#4 #444 (a)4 ## #41
7} 3 $4-5! 7}# #4. (a)4l4 fault stability margin# 0 4 #55 4#4 4 44
7}## 444 5## (44 3, 44 5)44. 444 #44* 7>4°> 4-55 44
34- 44 54 5## M 34(53 5-7 #5) (c)3 #4 44 23 4333 44
33 #4#4 #44jl 44 43 4^144- 44 53 #44 4 #44-711 €4 4
nfl (a)4* (c)4 ##4# 5# fault stability margin4 0# marginal stability#
#44-711 #4. (c)44 43 7>#4r 44# 44 2 #455 44- 27} 43 #37> 344 (d)4 #4 ##47} #4:4 44 27} #44 341# 471455 (g)
43 44 44- 44 64 434-5 #44 #31 #44 444 5### 4344
4r #3# #3711 €4
# 53 #444# 5#4 44## 34 444 #37} 5-12 (a)4- 445
7}44S4. #3 #4 #M4# 44 7}4 43 #344 5#4 #4# #7}
$154, 5# 4#45 44#4 444 #43 &34# #34# 53 5-12 (a)~
(h) #4 445 4#4 #4 ##43 44# # $# 444.
— 235 —
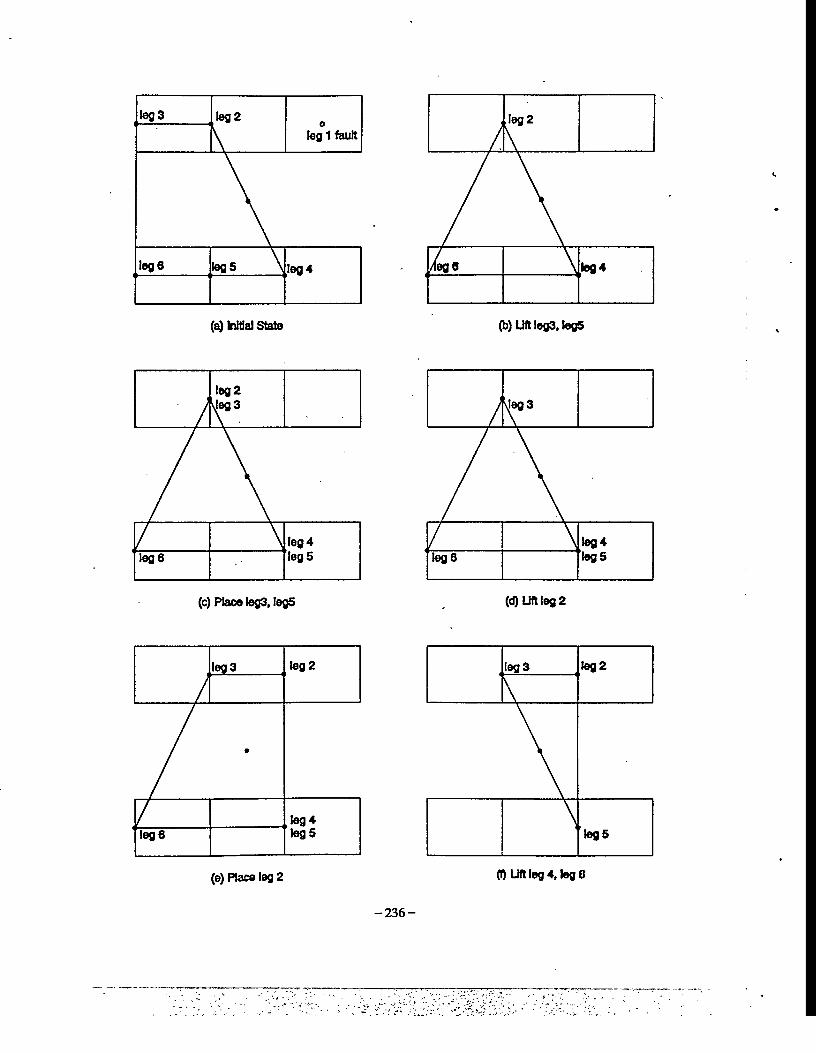
(a) Initial State (b) Lift legs, legs
(c) Place legs, legs (d)Uftleg2
(e) Place leg 2 (I) Ult leg 4, leg 6
-236-

(a) Place leg 4, leg 6 (h) Move Body
5-12: rq-Bl 14 rSM
0 AT T
(d) (0 (h)
ZLB) 5-13: ZL^ 5-122] A]# ^<d-2r 4*1 M).
-237-
4 44 4¥4]4 9^14 44ir¥ zl% 5-134 4# tij-g-4 44 -TKE44.
T
ys
3f+f
2f+ €*i + i
vi+2vbVj+2vb
(5.13)
(5.14)
a.44 1H4-71 44 44¥4 ^7l# 9-44 44 44 4^ S.x>. a.4
44 44 44 4444 4# zl4 5-944. 4 4, 44i:4 97^ 44 4 44 9-S.44.
T (5.15)
(5.16)
44¥¥ A>4 4-§414 44 444 s.9 ¥4444 ¥4¥ 4 (5.13)4 (5.15)44 # -9 &¥4 44 4447} a>4 #^5.4 444 #4¥4. ^44
zlU 5-124Ai 4 444 S-¥-6- -P5-4 44 4&44 2445.5. 4444 ¥*3
-238-
*E* 434* 4 ^ S4.
3. 43 241 2.3-4 3*
ZL3 5-144 5-15* 43 24 373.0] y>3S* 3*3 44 4-4 44-444.
44-44 44434 4-34: 43 14 3134 43$* 34-4 3*44.
n3 5-164: 4-4 M s.S.E.3 313 ^-4 44-43 44 *3s# 444
434. 3 zz.344 4 * 4*3 4-4 M 34 4344 34 l*3i
4 4 313 a>^4 4344 343 4 4 444 *^4 333 43 4*45. &
*34- 44. 3* *34 43 447} 53* S53 4 34 44 44# #44
* &# 3*4* # 43 2-3 43 444 444 434 43 4*45. M*
4*4:4. 3 4 fault stability margin* 44 0 343 4# *44-31 43*4
44 M *s.s. S3 *3 4444 4344 *444.
-239-

Ieg3 leg 1legZtauit
S
Ieg6 legs leg 4
(a) Initial State
(c) Place Ieg3, leg4 (d) Lift legs
-240-

leg 3 leg 1 leg 3
• o*......... ........>•
leg 6 legs tog* legs legs
I®01
too*
(O) Place leg 1.log 6 (h) Move Body
5-14: cj-Bj 24) 3.^°) ^
o »Tr T
(d) (0 (h)'
3.% 5-15: =L% 5-1451 Al^l *1*1 «).
-241-
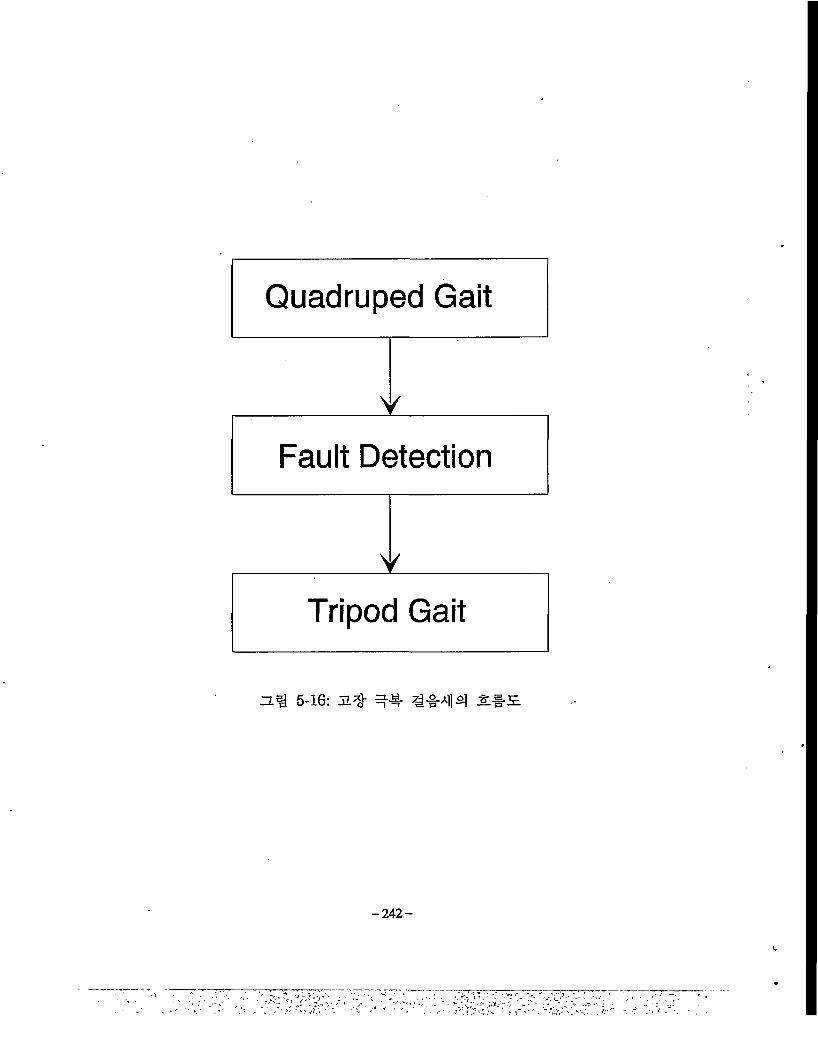
Quadruped Gait
Fault Detection
=L% 5-16:
-242-
41 6 ^ ^
4 #4*11714 4-4- 3*3 ^ig *]# M444 s# 4-4 4
4# 4#$#. 44 M 333 44^4 7>42. $14 s#* 444 14##
4*71144 44S.# 5.44^1 4#4 fault stability margin-4 4444U2. 4 3}#
0 44-4 #s* 44 444 s# 44 44 444# 444s n 4444 «H4 4S3. #44^4. &4 1#S3# 44 3*3 3334 44 444 514-4 #4
# 4*11 3337} ^1^4 444 447H* 444S' 3«J4 7114# 4 ##7}*
3^4- 4 #444 4 #4 s# 4# 7M4 44- 44 3*3 333# 5-16
4 3*3* 444 3*3 444# #4*4-. 4 s44 M44 444 fault
stability margin# 0 #*33 44 44 1471)3 3*34 447} #4 S4°l 1
4# 444 #4 4443 444# 4444 3*34 7)1444.
4 #4*1144 44 3*3 3337} 4^4 444 3*3# nfl# 444 4944
4 ##4. ss)4 til44 4^*1144 s# 44 7l#3 4 #4*114 7)144 ##
4# s4 44 447114 €4# 444# 411 4 #4 444. 4 44 3*3333# free gait* 4 #33 *# 447)1# 7}44 # #4*114 7)]## fault
stability margin* 0 ##33 4)471# 4# S#*ll 44734 7}* 4°14. 44
# 4## 4#4 3*34 4#4 #4*11 444 deadlock 44 #4# 4## 4
3 #333 #33 4 4 4144# #47} 4 #3# 4*14.
4 #4*1171 4S# 51# 44 #4711# 4# 4444 s#4 s# ##4
44 444 7}44 44* 3*3 333* 41 44# 4*)ls 441 4 #4 4*1
4.
-243-

[1] K. S. Fu, "Learning control system and intelligent control astern: an
intersection of artificial intelligence and automatic control," IEEE Trans. Automat. Contr., vol. 16, pp. 70-72, 1971.
[2] J. S. Albus, "Outline for. a Theory of Intelligence," IEEE Trans. Sys. Man Cybemr., vol. 21, no. 3, pp. 473-509, May, 1991.
[3] M. Jamshidi and P. J. Bicker, Robotics and Remote Sytems for Hazardous Environments. Prentic Hall, 1993
[4] A. P. Bessonov and N. V. Unmov, "The analysis of gaits in six-legged
vehicles according to their static stability," Proc. CISM-IFToMM Symposium on Theory and Practice of Robots and Manipulators,pp. 1-10, Udine, Italy, 1973.
[5] R. B. McGhee and A. Frank, "On the stability of quadruped creeping
gait," Math. Biosci, vol. 3, no. 314, pp. 331-351, Oct. 1968.
[6] S. M. Song and K. J. Waldron, "An analytical approach for gait study
and its application on wave gaits," Int. J. Robotics Res, vol. 6, no. 2,
pp. 60-71, Summer, 1987.
[7] E. I. Kugushev and V. S. JaroshevsMj, "Problems of selecting a gait
for an integrated locomotion robots," in Proc. 4th Int. Conf. Artificial Intell., pp. 789-793, Tbilisi, U.S.S.R, Sept. 1975.
[8] R. B. McGhee and G. I. Iswandhi, "Adaptive locomotion of a
multilegged robot over rough terrain," IEEE Trans. Sys. Man. Cybemr., vol. 9, no. 4, April, 1979.
[9] F. Ozguner, S. I. Tsai and R. B. McGhee, "An approach to the use of
— 244 —

terrain-preview information in rough-terrain locomotion by a hexapod
walking machine," Int. J. Robotics Res, vol. 3, no. 2, pp. 134-146,
Summer, 1984.
[10] S. Hirose, "A study of design and control of a quadruped walking
vehicle," Int. J. Robotics Res, vol. 3, no. 2, pp. 113-133, Summer,
1984.
[11] H. J. Chiel, R. D. Beer, R. D. Quinn and K. S. Espenshied,
"Robustness of a distributed neural network controller for locomotion
in a hexapod robot," IEEE Trans. Robot. Automat., vol. 4, no. 4, Aug.,
1988. ,
[12] Y. J. Lee, A Study on Crab Gait Control and Path Planning for a Quadruped Robot on Uneven Terrain, Fh. D. Thesis, KAIST, 1994
(in Korea).
[13] T. T. Lee, C. M. Liao and T. K. Chen, "On the stability properties
of hexapod tripod gait," IEEE J. Robotics 243utomat„ vol. 4, no. 4,
Aug. 1988.
-245-

*11 6 g- £!3 SIS3S oisa 0|SS5fs| 7|g
4] i ^ ^ ^ ^41
s£4 #** 414 ## 444 #14 e 44# 44 #4. 131s 431
4 99444 s>* 49* 119 s#4 419 tfll#ss4 414
44 41 &4 149 9^8# 9 54514 4* 14# 444 44. 444 5.44
#4 444 #19 4314* 4#s£4 7flt4 44=444, 917} €#* 9<3
444 4#s^9- 494iss# 5.# 444 4444 4= 4SE5. 4*s£4
4*3 444 7M4 44=471-444- 4 4= 44. 444 4*Sg-4 9*39 4314
9S 44444 119 €4 s#9 #4 4*s#4 >*344- s* 444 5il
41s# 4444 4# 447}* 444 49* 9*3 44444. 444 44s €
4 S99 49* 9*3 444 194* 444 114 444 44 444 44
44 444s 444 n #9 447} 44:44, 2.4 lls 4*44 194* 4s
7} 41 444 3.4 Us# 44 14^4 4* ##*4 #444. 444 4* S# iis 4*9 <45i <9 >84- 1* 4= $1# 444 9*3 4! 71144 A
944#4. 444 9 49-414# 444 444# s4* #4 4sl9 49*4 4#s#4 94 444- 444-51 4# 4iss sss4 9*34- 1444 #
* 4s# 444 4# 4*3 414 494^4.
4444 *34-44 1444 4*3 7114 4* 49* 94S* 4*4- 14. 144SS. 9*3 7114 49 44* 4*4* 41 S14 444 44 444 1
5 Til4(global path-planning)4 944 IS 44(local path-planning)SS 44
4 44. 4 9 444 is 444 19, 4*iss HMSs 444 #141 4
-247-

%4 3H-%4(ofl>line)3jiL 4#4%%. Lozano-Perez, [10]# 7}a] 345L
(visibility graph)# 4#% 22% ^^(configuration space) %^# 4] %%^%. 4
4% s# #%# 4#% #11# 4%#4 ^4# %4# 7>*M 4#s## 4-2.
3. 7}4% 4 35%7] 4 #41 #41## 4#s#4 37)%# #34#4
#3%7l1 E.% Brooks [18]# sl%%% %# -5.^(generalized cone model)#
4#% 2:# ## #tl# 41 %%&%. 3 44S. Voronoi diagram [19]% 3Bfl =
#4 [20] ## 44 7>4 tij-^4 e^%%. 451% #H# %41 %%# ##
##(free spacers. H%%# #H44 4% 4 4% #44 %3. 4144 4
#447]] €%.
444 45. 414^4-# #4 4%4 45. 414^# %41 %%4M %4%# #
#4 44%7l %%4 #44 44 #S ^ 44% 4s. t114-!15.#4 #4#
4M- 4#%4] 4%. 44% #4% 4s. 444# S# 4f44 44 41%4&
3.4, 3 # ^ 7>4# %4S.% %#% 4%.
tflS.4 4 #35] #35. 7}#"H 41 (virtual force field) [7]# 4 #% %44 5H%-
4 #H# 444- 44444=: 41# %#% #4% 7H4# #5. 41441 4#% #35. 41%#4 4-4-4# #4# 7>44 44 %%4 ## 434 #47} #4
%%# %44 4%. 4 #4# #4#s#4 444 #4%3 44# #4 #S4
33#4# 444 #7fl%%3 7}#%4 4 41 ^4% #(field)4 %A} #%
(gradient descent direction)35. 4 #5.## #4 441 %%. %% 4 #4 414 %
%%# ## %34 #41# 41%%# #433. 44 % 4 iS3^ (vector field
histogram) [7] #44 Borenstein% Koren41 441 4144 4%. 4 #4# 4 #3.
#4 #4 %# %414 #4 #4 #S* 4i£3f #433 S%% 4 #S4%
414 7}%3 #41-4 #4%4 ## ##33 4#5-## #444 %# #4 4 %. 4 #-4# %%433 %%4 4s. #4144 4 #4# 7}# % 3A}### #
44# #4#4 #7]]%# %# #4a]# 4#% # &# %4# 7}#%. h%
-248-
Marc G. Slack [9]! navigation template #4) 4!4 741 \l! #312]
#! 4ii!$4. 4 #324#! 7\mn m m ^ 4ai #4# stii
# ! 17H, navigation template! H# 11!44 14 ^1!!4 34^- H
! 44 4 A 3)^1 !2)4- H 4Sl! 4!! 44 7H #32) #4 e
*H«H 4##4 ##1as 4! t11!1> #44! 14 #4 4# 4)7), 3.2431 4-
# #44 siii #! #ms !4.!! HI AS !44 411 14# 7}A)^ °1 -^S^car-like mobile robot)
•Sr 444 y]jiBl^o] $2=. 7>1 o^^Lcq ID !3(linear velocity) 4
#4 #74)4 4!4 !4# 41#! ^)# 311 nonholonomic *11!
31! 7}14. 44! Till: 31! 4#A#4 371 7}A|] (initial configuration)!
4# 7>4(final configuration)?} #41# 4, #4 4-£-A!4 IS 7)1 ^4) 14
!! !#4 !4# 7}7]# 4H(feedback) !44 13. 4917)4 #7)1!! Bl
! # SMI !#4 [l]. 44! 124 14!s6)1a) 741M #324 #3 042)1 11!
3!! 32) 4?1 $£! HH °4 #3#(omnidirectional mobile robot)! 7}lA
s.!4 74114^ABS 44! Till 31! 3444 &4-A 441, 4##4 7} 4 1)44 4#3.#4 tflsflAi# 14-13444 741M #32)#! 41 4!44 # 4! 44! 74 4 Til 44.
44 l7}4Aofl7)-^- !4A ^44 !1 4sKHopfield type neural
network)! 144 13 44 44M #! #&!## #! 144 IS 447)4
4!!$A4, 7}!! o)S4! 7]z} 1 A)(vision sensor) #! 4 #44 !14 1
1 A! !41 11 4s4! 4!4! #7)4 4#! Is 11714 74)40] 44
IAS A9-44. 447) 1- ifoiii! 744- 4a)4 a!4 11 ## 4#44
#! 11 & 14! 4, 4 14# 41AS 1M 4#A#4 4! 7}4) (configuration)# #1# # 1! 11 4sl! 4!! Is 117)# 4!!4-
A! 44! 414 11# 41! 4#A#4 !!4! 1!4I 4444, 44! 44

4 44# 444 ol#5#41 4=## 4= $lfe 4444 #5 4^# 4#
314:44-. #4-455 ##4 #5 3144# #31 444## #31 #5 4"4# 4
A) #5(local sensor information)4]4: 4 #44 #5# ### # $1—4, 4# #
n ##}fe #445 4 #5## 4## 4s $1^11 #4. 5# 4#4 #4 #4-4 #
# 44# # 4s $15.# 4-4 4# ## 44 54# 41 $>#4-. 44# ## 445#4 41## 444 4344 ### 4^(sampling time)## 4#5-§-4 ###
#44-5. #44 44 4-414 44#44 ## <4## 44 444  44&
#4 #44 44 5.4 ### #44 41 #4. 44# #44 45. #44fe #
4fe 444 #44 44 #4 547} 4^445# 4fe 414 #4# 4#441 #
4.
444 fe 24#54 ##fe # 7>4 ^-#55. ##44 $14. #4 #4 4#
4  444 ##4# 4455. 44 45## 4## #5 ##?1 71141
41 44# 4#5#4 444 ;H#4 #5 ##?1# ##44 44 #5 ##44
7H#44. 4 # #44 «4 #tq# 4# #5 3147m 54 44# #44 =l
#3l## 54715 44. 54 ##3l#fe 14454# 4144 5# 4 4 (surface
vector)# 4#4 #44 #5 3144# 4#44 #5 ##44 ### ##44,
#415 4# 45## 4#4 #5 ##7l# ## 54 #4 4# #4# #4 4
#4 4#4# $3fe #4 #7}#455 44 44#fe W 4# 4-4154 #31 4
#5#4 3144 4#4 4 #4 #44 4#4 4°} 44-.
-250-
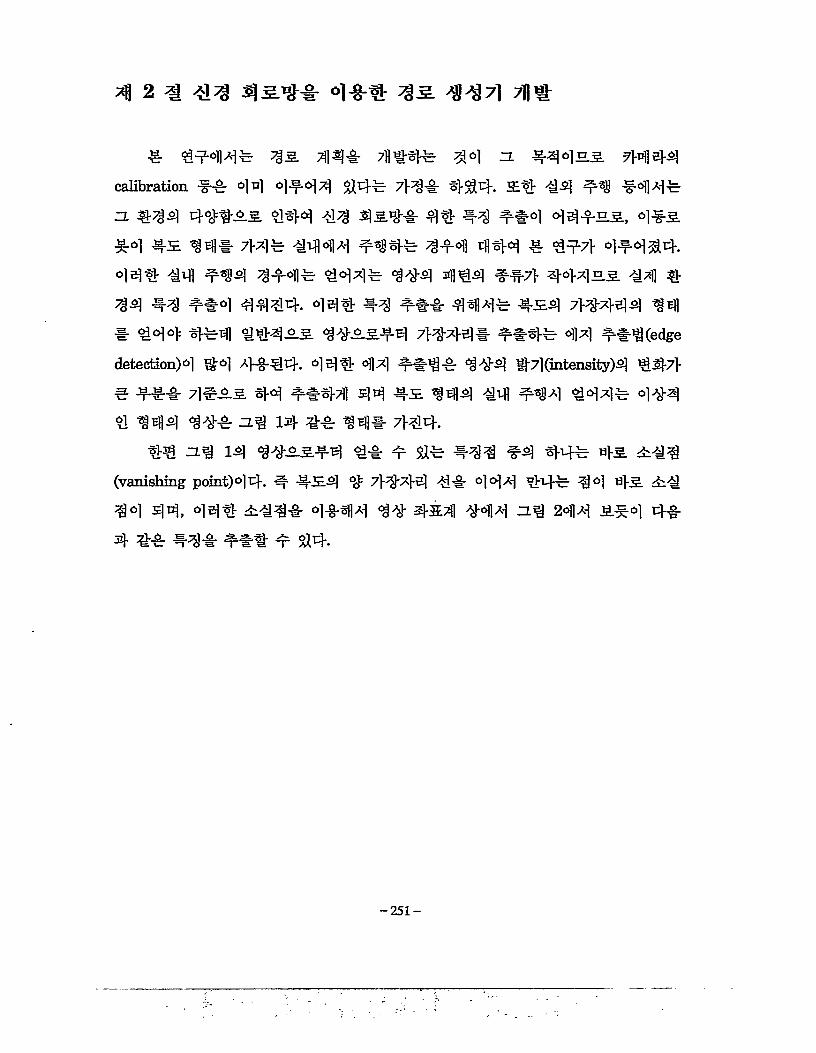
4- **444 ^5 44* 7flt^ 44 ZL 5-4455 7M144
calibration 44 44 4*44 SI44 7}4* 4*4- 5* 44 *444
n #^4 4**55 **4 *4 45.4* 4# #4 4#4 44*55, 4*5
*4 45 W* 7>44 *444 4*344 4*4 444 4 **7} 444*4.
44* #4 ^»3s] **4^. 4444 444 4144 **7> 44455. *41 *
44 44 4#4 *444. 44* *4 4#* 44144 454 7>4*444 44
# 444 444 **455 **55*4 7}*4-4l- *#44 44 *#*(edge
detection)6! §M1 4-#*4- 44* 44 *#4* 4*4 W"7l(intensity)4 **7}
4 *4* 71455 4-4 *#44 44 45 ^44 *4 **34 *444 4*4
* 444 4*4 zl^ 14- *4 M# 7>*4.
** zi* 14 4*55*4 ** * SI4 *4* *4 *44 *5 5**
(vanishing point)44*. * *54 * 71-44-4 ** 444 *4-4 *4 45 5* 44 44, 44* 5**4- 4*414 4* *±41 *414 5# 244 5*4 4*
4 *4 *4* *## 4 SI4.
*11 2 4 4^## °l-§-^T ^5. >S^7l
-251-
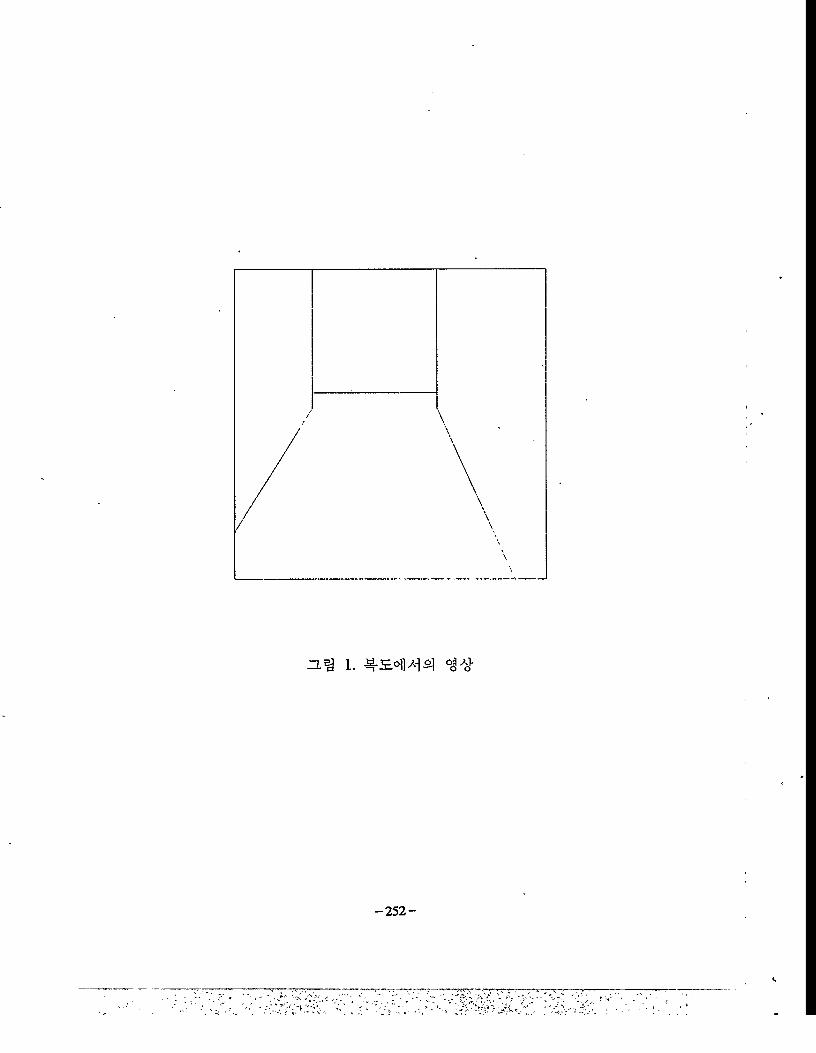
ZL^ 1. 450^12] o|a>
-252-

vanishing point
2. <$# zj-aziMM-M

zz.5] 2*\}X\ ### #^4(feature angle) 8^3 3M 04 7MI:t4
4#5#4 4-4 W4 #5# ^^47)] ^-a- 4444, 4 4 4#
BM 4 #4# #3. 43# MM # 4# #5^)4 y #4- ^§^44. stir 5# 3
y 4 4144 4# 1W 4 4% 3 M 4 #444 444 444 4 #5# 4
44 Wir 4£t 7)#55 4#4 #4 4 44 4 #5 44# 4 #4.
(i) 4 M 7} 4 F 4 €#4 #4 #4
44544 45 A 44 #45 #4.
(ii) 4 -M* 7} 4 y 4- #44-4 #4
4#5## #54 ##44.
(iii) 4 If 7} 4 y 4 5##4 #4 #4
445#4 #5 B #4 #45 #4.
444 4# aBH 5-444 445#4 #5# ^## 4)4 #54 ##4
##* #4# 4 #5# 44 4#5#4 AM)# #4# # #4. 4# 5# 24)
44 #44 6 4 44 444"# 4#5## #544 ### W4 4# 4444
455 zl 3M 3.7} 54 4#5#4 ##* 4#444 44# # $14. 444
### 4#4-7) 4# A}# 4444 calibration4 #547)1 44, 444 445#
4 #54 #44)4 4^47)1 44# 4, #44 5 44 04 45# 4447}
calibration 4 455 # 45°))Ai5 7}44^.4- A}## 444 44144
calibration #4)5 ###55 f}4)44 aM)# 4447} 44#55 444 #5
-254-
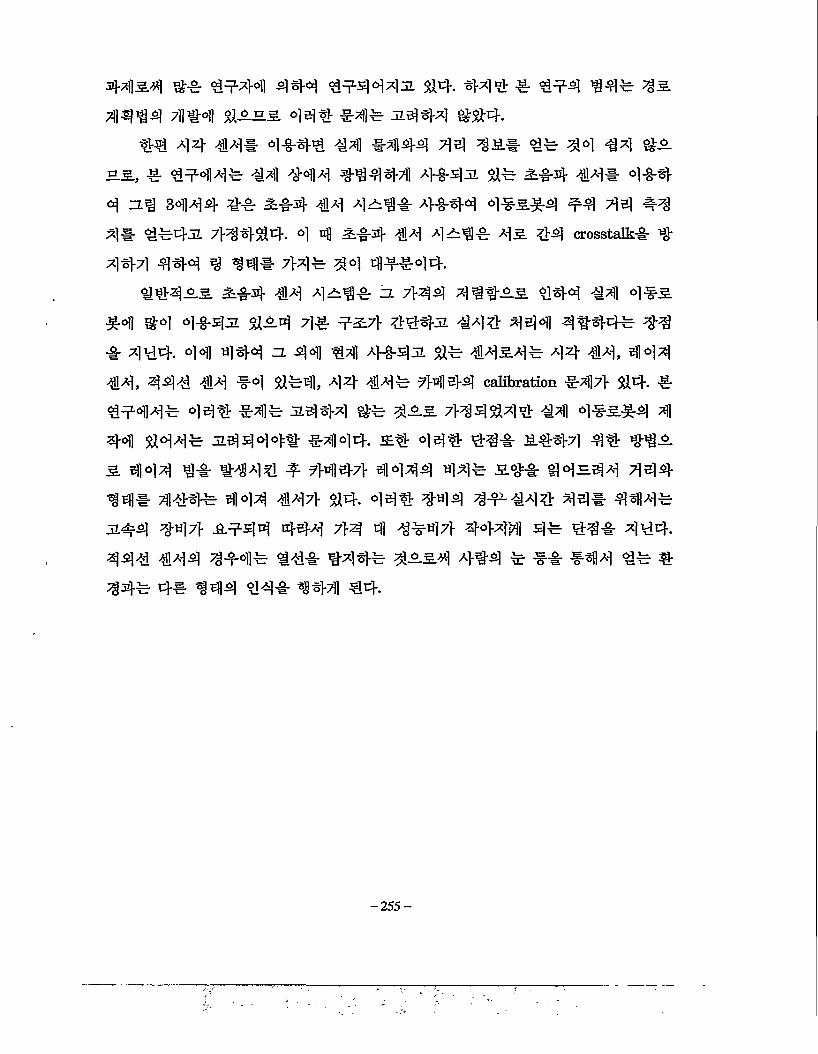
4434 #* 1*441 4 #4 1*4443 *4. *^-4 ^4^ 4s7|)##4 7llt1 *4# *4* 3B]#4 ^*4-
## 44 44* 4*44 44 *444 44 43# 1* 44 *4 *s
■ELS., # 1*44* 44 444 4^444 ^1*43 $1* &*4 44* 4*4
4 3^ 3444 1* &*4 44 4^4* 4*4-4 1*3#4 *# 44 #4
4* 4*43. 7>4444- 4 4 &*4 44 4^4* 4s. 44 crosstalk* #
444 444 # #4* 7>4* 44 4**44.*4:433. 5*4 44 43^* zl 7>44 4 ##33. *44 *4 o]^
*4 S4 4*43 *34 4# *37f *443 *4* 444] 4444* *4
* 444- 44 444 3 44 *41 4*43 ** 4434* 44 44, 444
44, 444 44 *4 **91, 44 44* 44144 calibration *47} *4. *
4*44* 444 *4* 3444 #* 433. 7}#4*41 *4 4*s^4 4
44 *44* 34444# *444. 3* 44# *4* 344-7] 4# #43
3. 444 1* #44* * 7H47> 4444 44* s#* *45.44 444-
#4* 4*4* 444 447> *4. 44# #44 4-^*4# 44* #44*
3*# #471- 3*44 4-4-4 7>4 4 4*47} 44441 4* 14# 4*4-.
44* 444 4*4* 14* #4#* 433.4 4#4 * ** #44 1* #
44* 4-e #44 14# #4-7)1 44-.
-255-
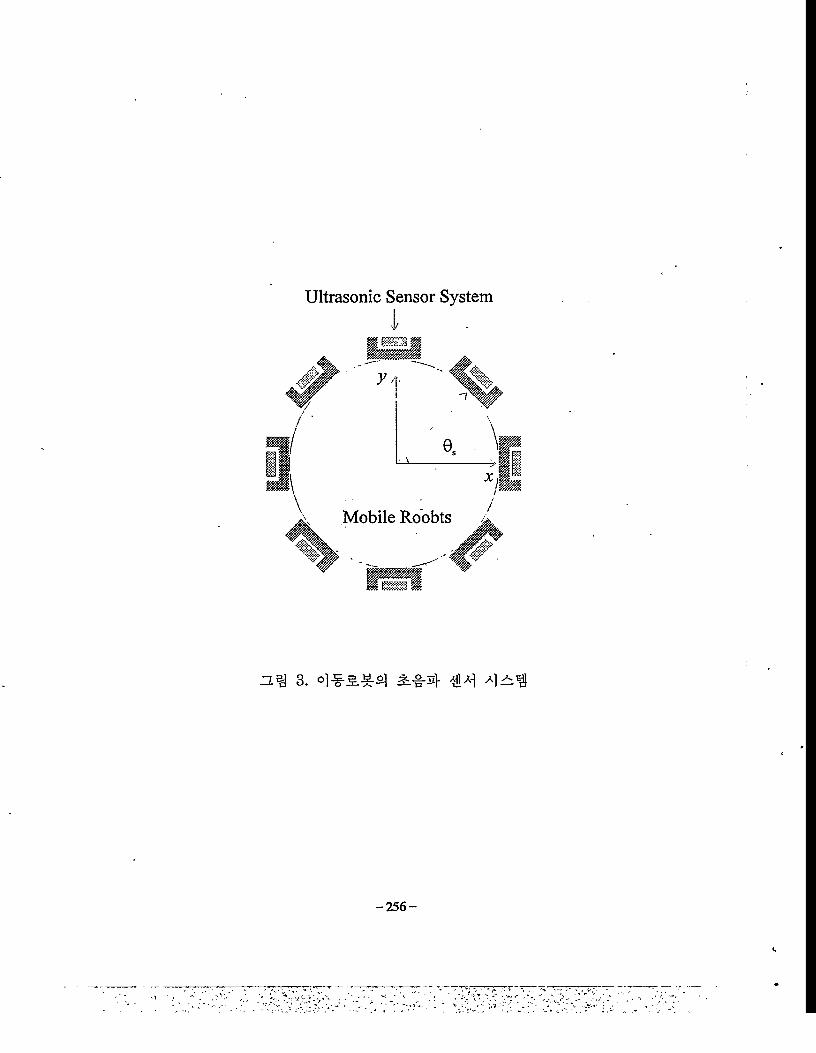
Ultrasonic Sensor System
3. a-g-5> A)^
-256-
A#4 4^4# #^1 #44 Tie] #4## 4### 44*4=4 4 #3.4-4
4A4 #4As. 4## # 5M 44- # 4A44 Tie] #4 #7} 4# 4 #4#
n 7]e]7> # 4*#AS. 4 #3.## 4## 4# 4^4 ##AS. #### A##
# # $14. 444 44# t]4as. 44 4-§-3.44 4 44 43.# 7}##-# 4
#4 4 ^(sampling time)44 4## 44# 44# 4 &7)] 44- 444 4 s! 4
44 mm 4# 44# 4#3.#4 444 #4 4## 4444 44. # 4
44 t># 444 44441 44 ##* 4#3.## 444 #4 44 43. 7}# $■
4 44# 71444 44 4#4 44# 4# 44 #4# nfl-f #A#4. # 4#
44# 4## A4 ### #44 44# to4#(algorithm)4 44*4# #4#-
#4 A A# 4 ##44 &ahs. 44# 44 43.4 7}# 4## 4-f 4# 4
as. ##4#4. ## 4 4 #4# #4 #3.4 7M14 #4 444 ## #4# #•#4* 44# #44 #4 &AE.S, # 4#4 ## 4 retraining data)# 4#
AS. #-4 #*#€ #4 #3.## 4##-71] 4# €#-# #4* 4# # #7j] 44.
4# #4 #3.44 ###(generalization) 4 #44 7]### #4 #3.4*4 #t
# #4# 4## 444A # # #4. A# 44# 44 A#4 43.# 43.7}
444^# 4# 4,43.# #4 #3.4# 3.4 4 #-#-7)1 ###7]#tll ##1 ^
&A#, 4# 4#14# #4 #3.4*4 #4# ##(on-line learning) 7]## 7>4#
44 444#4. 44# 4# 44AS. # 43. 444# #4a# 4#4 4:4.
■k
t/
-257-
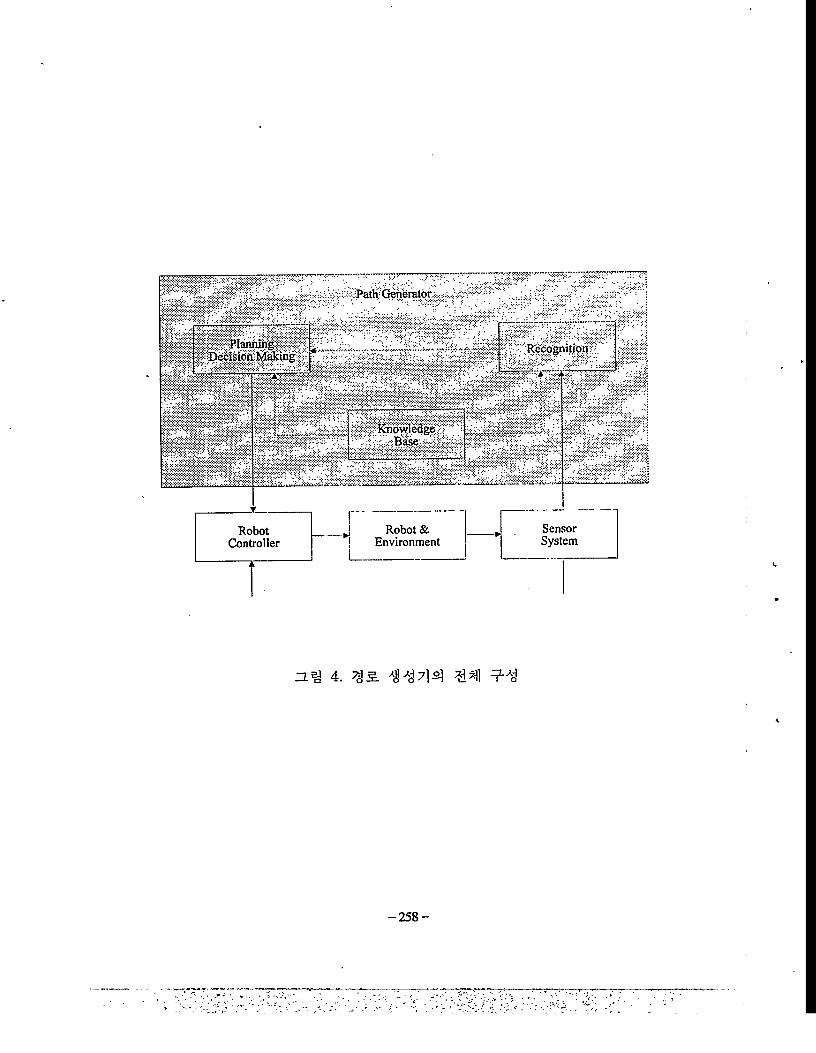
■Path: Generator,
SensorSystem
Robot & Environment
RobotController
Recognition
KnowledgeBase
4. ^5. 9-^
-258-
4-eM 41-21 94 9 44 #5## 45 447M 4#4§ ## 444
(planning decision making) ##4 4*44, °1 4 944§ #1# °1-§-5.4-21
4* 444- **# ( xd, yd, <^)4 14 *#*]t]] ## 44 45
^(knowledge base)# 7-1*71-4 444 4# 9444, #4 ## #§44 44
#444 4 §5*4 %M1 4441 ##* *##4-. 44# *M 714: 44 #5.4-# ##47l§tH 4*44-. 444 xi^ #54# 4 #55# 44 44
5#4 4# *41 6 44 5*# 4454-4 4# ##5##4 4444 #4
7}7ll 44, 4§5-4-4 44 W4 4# §5 5# ##55 #444 44-. 44
444 ##55# 4§54-4 ### 4-# *M] ( xd, ydt </>d) 14 4-4-4-tII
€4-.
1#*55 #4 #5#-# 44:4 §4 4** 54-4-4 ##44 #54, §
4 #5*4 *44- 9# §4 434174 *# 49-7} 4§44 #4. 44 §§ §41
4- #4 #5# #414 9-5 # #9 #1 5# #9- 4§44. 44# #4 #5
4# tflfl-54 41 44, *# 4*5, 44444 #§4- *9* §# #444
4*4# 444, 44# *4* 4**4 *4 #444- 4# #4 1# §44
#4 4§4 5 #4-. ## § 4944 7}*1 4# #4 #5#(multi-layer
neural network)# 444 #9# 9## * 9 #54 94# 44" 454# 1#
4 45* §41 *4 #5#* #-941 9 #4- 44# #4# zl 4#44 #4
7} 4#-#4 ## * #94 45 4444 711# §4 1 4*1 9 ##.
45 4444 4*g 44 #5## 4# 44 #5# 95* 7>44 ###
4§ 4§5*4 #5. #4=4 *,y 14 *44 6 1, 5#5 5*# 445*4
#4# *5 #*#-4 4414 9444-. 44 #5*4 #4§(hidden layer)# 2
4(2 Iayer)55 9444 #4 #4# 4 §5*4 €*# 4* *M14
( xd, yd, 4>d) 14 4-44-5* 4#4. 44# *4# 444 44 #5* 44
-259-

51 44 feel (fuzzy logic)# 4-§-#4 9£ 44- 9 *14 44 Al^o] l
9 44 944 94# ^9## 9 ^4 449 44 944 99 45.## #4 4 4## #5. 9944 ;H#5. ^4 9# 44M4-
4## 94# ( *rf, <U %4I 4^4 9#9 ol#s.#4 49449
#9# 449 #5. 944# 44945. 94.
— 260 —
3] 3 ^ ## 3 5. ^7] 7fl#
a. 8#-tillA]# Al^ 423# 4## 43## ^5. 347lS.#4
4#2#4 44 ( j)rf, ^) # #33 4 #2^4 44-7}2# ##
3s. #33# ;H3#84. 44 43^ 444 33 #2 33=4
444 #4 444 44444 #4# nonholonomic 2#25. 344 35. 33
4 34=# 3#4 [l]. 3 #4 35. 33 334# 7W=(open-loop) 334 443
(feedback) 334 8#3 4# 334# 44 3434 #444. 44 3
34 3-4, 4# 71444- 4444 44 44 ^^(configuration space)# #34
4 34 2#4# 23 445.#4 4# 7M124 35.# 334584 [2,3]. 44#
4 #2 334 33# 344 4# 43-44# 34 $134, 4434 #3. 434
444 443# 3#43 # 44# 43# 7>34. 44 R. W. Brockett [1]#
nonholonomic 3^44 3# #43 344 443 4434 444 447]7} 3
3 #443# # 3# #3444. 45. 444 444 35. 4334 3-4,
#34 444 34# 4#4 35 33371- ### 4#t1] 444. 4# #4, #
7l 3## 4#4 444 33[4], 4#34 33 3## 4#4 33[5] #4 44.
44# 444 33# 3#4 443 7ll#2 334 44 3444# 33# 34
34, 7H#= 334 4471-35 434 434 443# 3#43 # 4# 34#^134. 44# 34 A. D. Luca et al. [6]# nonholonomic 41# 2:4# 3Z.4 #3
3# 45- 3332#4 #44 33141 43 42 24# 7>3# 443 344 4 2 #33# 313484. #33 45. 333# 4322 4 4 35. 333# 4
34 #34 44l7]2 4# 7}##4# 33# 3433, 34#44 3# 44#
33 2343 # #4# 43# 342 84. 44-7] 3^#44 3# 44# 2
3#2 44# 32 #34 33# #41 33# 444 33# 41### 42# 3
4# # 3#47] 7113484. # 4347] 71134 42# 334 4433 32
-261-
11 %3%# 45!: 13'4144 #1 444 4# %44 lOTl 4 4354 4% 3# 13 4444 4443 44 44# 5 S&4. 444 W 4 7flfsird 13 44#3 4 444 444 444 44354 441 f $14.
144-6.3. n! 54 14 44% 443.5-4 1441 4444 3.1
(kinematic model)4 444 14.
X cos^ 0
y = sin^ 0Ml
:<}>. . 0 1,m2
4 4 Ml 4 443.54 1% 43# 44 44 144-2,' «2 5 3%=1 4
4 14# 4 444- 444 44% 44354 nonholonomic Hr 31# 4#4 1# 435. 4414.
#sin (j>—ycos 4>— 0 (2)
14" 4 (2)4 441 41 31# 454 5444 % 143.3, 44354
414 1% u=(Mi,M2)r # 544 4141 14.
-262-
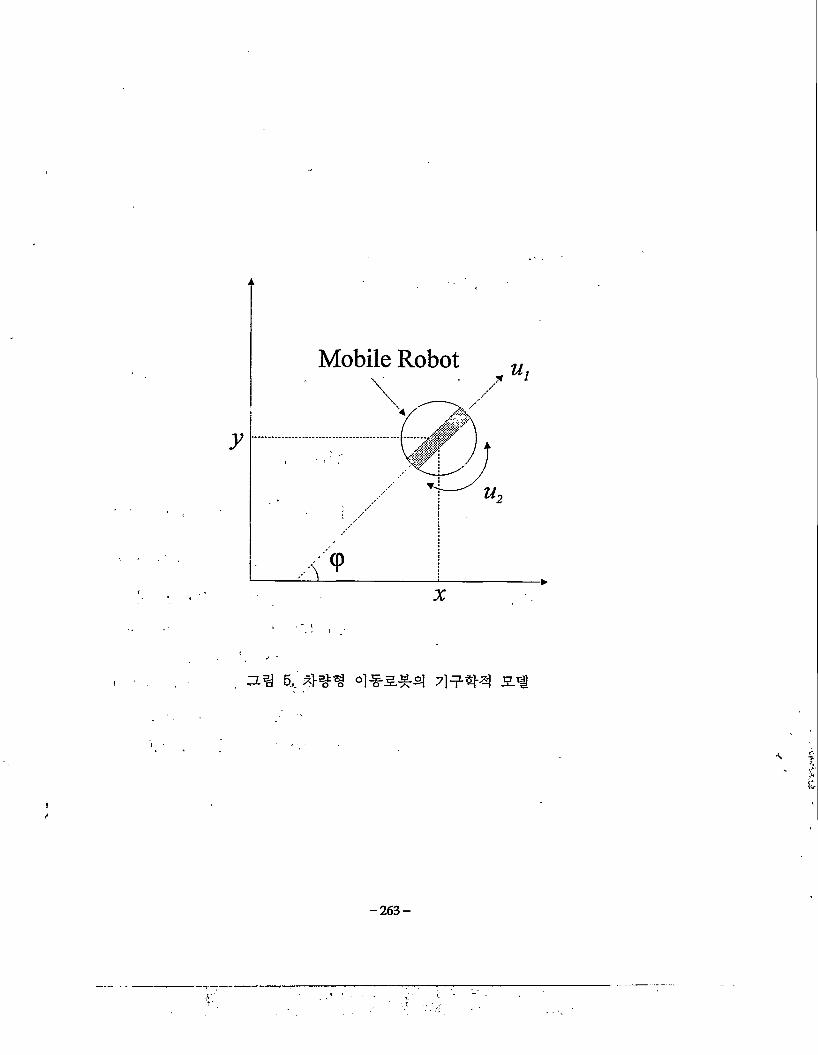
Mobile Robot
a! 5, 2.1
- 263 —
44 4W4 447ls#4 4# 44# ( d> $^)4
*4 4 #4 o]^. -*} (2)«9)4 *44 nonholonomic 44 S## ##44 4 s. -g-
*5: 14. 44/9 44 4* ^*, *44 4* #&4 ( xd, yd, <U<91 7}4
*4#4 4 s# 4## * 1# 414 %M u=(mi,m2)t1- 44 4*44
4- 4# -444 A. D. Luca et al. [6] # pseudo inverse# 4444 414 14#
4414. 4 4 (3)4 £4 4#s£4 4#4 s.#4 &441# 41, 414 14*
4 (4)4 #4 *444-
x = G(x)u, xeRa, ueRn_ra (3)
u = G#(x)xd
= [Gt(x)G(x)] -1Gt(x) x"d(4)
4 (4)414 *44 7114 14* €4# 441 ( xd, yd, &dy11 g\±
s #444 44# #41447)1 44. 4# #44 ( xd, yd, 4>d)7} 4 (2)4 s
4# 4## 441# 4# 4447)1 441# 2M 44. 444 444 444 *
4# #44 14# 44# * 1# 44<915: ##43., A. D. Luca et al [6]<91
44 44<91# 44#44 ## 44# *444 # 4# 44# 44# 443. 1
4- 444 # ##<914# 444 ## 44# *4444 444 444 444
444 4144* #44# 44# 41444s 44-. 4 #41# 4*4- 4* 414
2:4# ## 444 *41 (constrained optimization problem)^. 4*4 * #4-
-264-
9# 44 5#
Minimize [ xd—G(x)u]T[ xd—G(x)u]
subject to (5)
444 44- £# #1# #7l] 4#, 4#3^4 19# 444 #444#4
9# 44# 24# 4" ai 44. 4 4 9# 44 3## 4444 414# 9
44 #4# 44# 9 ## #4# 4## #4 3l(environmental model)6] 3
9-44. 4- #914# 44 444  44# 4#4443 7}49$#1, 3
1 33} 4# 3#4 444 4—4(ultrasonic sensor ring system)# 4#44 4
4 944 44 2.1# 4# 9 44. 444 #1 31# 4 1#^ 4444 4
444, 444 4 4#1 44## 61#3#4 ### #44 9# 41 #4 9#
# 13.44 #5.# 44 <94# 44444 #4. #4 4 4 #4 44##
4#5.91 944# 44 14# 19&25 94432. 4#39# #### 4
I 44. 444 99%# 7>4# 44 14# #4 4#394 4#4 4# 9 #
# 44# 94# 9 4 44144 41 #44 9# 49# 9# 44 2425
14# 9 #4. 4# 444 2#4 44# #4 #4# #1 314 4#4 1#
#93 5.144-2 7>4#4.
d— £(4>s) (6)
444 d # 94€ 7]2]# 4444, 43 ^ # 3#4 44 # (sensor
beam)! 1"$# ! p] #4. 4 1 4 #394 44 ##(heading angle)# 7]935.
43 <PS 44 1444 44 #94- 1 W4 #4# 1 43 4>s 4 4# 044.
444 4 (6)# 97]7> 2^# 94 #9 11# 444 4 #9# 4#4# 9#
-265-

44 2:4* 44# 4" $14. # 44 4^44 4#4 4 £#$>4 4#5.*4 4-
#*44 Tie]# ^]44# 4W 44 *4 4#3.#4 441- #4# 4^ $1-6-4
4* 4*44 n 444 44#4 **# 414^ *#4 4*# #4# 4" $1
4. #4 4 (6)4 4** zi4 64 44 5444.
CO25
20
15
10
5
0
: 1
.....f£l.m' a
J ' /" \1__________ 1........Li7 ^
1—VT L'
- - - - »AV>ViVAV,VAS>,VAVkWA■AWMKVWAWV*.
n 271
zz4 6.  44# 4*4 5.1
— 266 —
# (6)# *44 45 5.11- 4*54 ## SI 3] 3:5* 4545 4*4 4
4.
£((m2 + ”—* %) > sgn(ui)ui • % (7)
444 44 15 Mi 4 m2 * 44 45 *54 4*5. 15# 4444,
5* %%(• )* *±4 4 -l 5* 1* 71-44. s% Sts * 45 554 444*
4#5 44* 4454. 4 (7)4 4 44 44# #454, 44 sgniu^ • <%
4* 414 54 «iir #44 4*5 44*4 5*4* 44# 4444. 4 41
44* 5* 5*5444, #414 4*5*4 4# 4*4 **4 5* 7>*4b.
5 4*5 44*4 4* 44# 14571 4414* 5* sgn{ • )* 4*544
44. .(Mg+(!-%%(Mi)W2) • Sts 5* 414 44 m2 4 44 4*5 44*44
4*5*4 4**5# 444711 44. * 4*5 44*44 4**5= 44# #
41 4*4 7147} 45 5*5 44 *4 4*5*4 *4 447} 455. zl *4
444 44*4 4 4444 144 554 #* 447} 7}*54* 54 *44
4 (7)4 4444. 54 (l-sgniuj)^ 44 *7}5 4#* #41 414 44 mx
4 #*5# 7}4 5*, 45 514-4 45# 414* 4# 4*555 4* 4 14 4**5# 7T 4* *45* 44 #554 1*44. 4* # (6)1 *44
45 5* £( • )4 *4 5*44 1*1 7}#54. 454 *44 # (5)4 (7)#
4*54 45* 14 15 u = (mi,m2)t # *5 * 14.
-267-
f(02 + ——K). §ts) > sgn(u{)ui • 8ts
Minimize [ xd—G(x)u]T[ xd—G(x)u]
subject to
4 (8)* 444 44% 7] 4 (nonlinear programming)*- 4*4"4 # 9 $1—
4, 4^3^-% 44 $144 37H 4# 4%* 4*4 #4 44 44# 2:4#
4 44 4* 9%# 4s $14.
U£ U= {(«i, W2)r I 0^|Mil^Mi>max.0^|M2I^M2,max} (9)
44 4 (9)# 4*4%, %4 3714 41%4 $** 414 44 44 444 €
4-^ *41 ( j,'d, <U # 7>% # e^## 4= 44 444- 4 (8)4 4
# 44- 9 44-.
4-4-4 44 44% %% 43%* 4*% #%%=% 4*3#* 4% %3 4
^4394 ( 3^, <Ul- %* 4, 4# 9*%** 44 44* 9# 9 4
4-. 4 #4 % 4944 4%% %5ie]*(algorithm)4 *3:44 3 4** 344
44-4 34 *%* 44-713 %4-.
-268-
41 4 4 sl£1
#4 454# 4## ^5. «4# 44 #5 ## ### 4 44# 44444 #447} 5#44. 44s. 444 44" 44# 4-8-4 #44# 44 4^1
4fe 4#55-4 444 5#44 7}# 44 44144 54 ##4 44 #7>#4
4. 444 4 ^#44# #5 #44 44 ( xd, yd, j>d) # #44# # $1#
45 #444 44 54 #44 4#4^4. 44 54 #4# 444 44 45
4# 4-8-4 45 447] rfl44 144544 4144 444 45 444# 4-8-4
4 ( xd, yd, &M #4445 7>44^4. 144544 7H#4 #44 45 4
444 444 #454 4#4 #4.
14^544 71144 #44 45 444# 4#4 7p§# 7>44- 4 4444 45 4447} #444 #4 #&4# 4#445 71-44454, 444 #4 #&### 4# 4554 S444.
7}4 1:44# 45 444 #44 #4 #&## 4-S. 445 #444, #
# 444 45 444 44 45# 4 #4 #M 44 4# 455 #444.
7}4 2 : #4 #44 44 45# 44-4 545 #444
7}4 3 : 4# 5## 44 W55#4 #44 # #54 #444 41# 54# #45 7>4#4.
44 7}4 445 7>4 4# 44#4 571# 4# 5#4 44# 455 4
4 44 #44# 44#4 4# 4# 5#4 444 54 ub}54'&4-# 7}4#
#4.
-269-
## 44 234 94 994 44 #4 a#4 #44 4s. 4444 4#
4 #9 s.44* 444 944 4s. 44# #44 444 937> #44 4s 4
44 43.4- #99-# 2°1 44 444# 444. #4 444 43 3]44 441
#44 43# 44 43ffi #444. 444 4-B-4 4# 444 44# 93
444 43 44# 9444. 4# #4 4# 329- #4 #54 44 44 43
#4 94#4 ## 494# 44 9*3# #3, zl^4 ## 494# 44 43
#4 44# 44#4 444 44- 44## 444 9^4-4 44-. 4 4 44#
# 4## 44# #44 ## 4-4# 34# 9 $1# 5# 44# 4#44 4#
4##43 #4. #44 4#4 9# 444 34# #41 #4 444, ^4 74144 #4 #4 ^5.# <£# 9 ## active window #4 414 #4 44(safety
region)4 44# 4# 44(obstacle detection region)# #4- 44# 444 9#
# 4932-4 #49# s#4#4 #59# §M 4# 235.4 #9 44# 1
9 49324 ##3(safety margin)# 4:414-3 #4# 4# 4444# 5# 4
9* 44## 4## #4.
-270-

Goal heading vector
Obstacledetectionregion
Mobile robot
Active window Safety region
hb} 7.
-271-
#4 445 ## #4# ##4 4# 4433 4# 354 54 ^*s
4 44# € 45 ##44 5441 444-4 44-4 44444-. 55 #4 44
47-1 #4#4 444#, 45 4# 3£4 #*T|#4 44- 5-44 #45 4##-
444-33 4# W 444 45 €*3 #44 4444 #4. ## #4 #4
4 3.45 454-4 *344 44 443. 441# 5 #4# 4445 4# 3^4
44# 444 5# 4 #43 €7114-4 #44 45 45# ##35. #4345.
44. 4 45 4# 344 44 #3# vmax4-3 43, 4# 344 4# 5*3 4
## 4454 445 444- Ttoto/44-3 44 4# 444 34# 444- #4
#444.
(10)
444 ^^5 44 444 444 4444.
4 41 Ttotai-Vna* 5 4# 3#4 4 44 5*3 4### # 5 45 44 44
# 4444, 44 44 444 3717} 434 34 44 44#4 44 44 4M1
4 4444# #5 4# 44 5 45 5*3 4## 4145 44 7}544.
44 44 4144 44#4 444 4# 4# 4# 5 45 5*3 445 4#4 7}#-"# 4 4# (virtual force field method) [7] 4 44 4 4 (repulsive force
vector) 71145 45#4. 44 445 #5 #4#4 €41 7}5#4 45 44=33
#511433 4 44=33 4# 3#5 €4444 44#4-4 ### 44 € #4
44-. 44 445 4-54 #3354 #444-.
{x^-x^x+jy^-y^y(11)
-272-
4 7] A} K*i% : 11 14
d(i,f) : active cells}- o]# 5.^. A}o}.e} >|e]
(%o > 3>o) : 4# k#s] -Shfl 14 1$
(Xi.yj) : 44 1 1 H active cells} 1&44.
n : 1444.
active cell# 5.1 ^44 ^§<1 11 1 l^Kgrid)# 14
14. 444 44 5-44 11 14 4M 11#4 141 441 41 114 444 14 4414.
o
= Pzm + 3E9 (12)
114. 11# 4444 41 4&11 7>1# #5.3. 4
4 s#* 414-7] 444 541^4- 411 11 11 41 111-4 144
4-t- 44 s## W5.S. 4144.
Ill !!#& 114 4# 144- s.A>i7} 414 His. 4 41 A}# &
1 117]- !#!%4. M 114 #1 44 s#l 441 A} 7>sa> 1#
1S4 141 11 is 11 11 #1 11 IS# 4147}] 14. 4# 1
14 H# lH 414- active window ifll 4$%4. 114 441 4:4 4
1184.
^ay — Kay * <Zay(.Xt-x^x+jy-y^y
V (*/—tfr)2-f Gv—:vr)z (13)
' 444 " jEgy -11 14
-273-

: Si 4^i #* 41*
(xhy) : 7]-# 1#4] 441 #41*4 #-5
ur,^r): 7i# 5*#4i 441 #4*4 #5#
#* Xl 44 #* 4* aay 4 *2# 5*11, #4* 4# 14414 #
4*4 11421* 4 4# 41# #** SI 44# 4*44 44* * 44
44. 444 44 Si 44 4* 44"# 44# 44* 1*145 44.
4* 5*4 441 444 #4 #S* 444 44 *5 441 #41*4 *•*
41 4# ## 44* 44 44 44!41 4*4 #4 51 44*4 4441 44 4
*4 44 4* * 214.
(i) #4 **4444 4* 4s. *41 *4*4 SI# #*
4* 5** *4 *S#* 444 4* #** *4.
(ii) zl 44 4*
(1) *4* 41 44414 #44 #4*4 414 4421# 4*
4* 5** *41*4 41* #41 *4** 441 4 *1 *S*
* *14.
(2) *4* 41 14414 #41 *4*4 5*14 4421# 4*4* 5** #41*4 5*1* #sfl #4** 441 4 ## *S
1* *14.
(3) #4* 41 14414 #41 #41*4 *1* 71-54-m 1# *#
4* 5** #41*4 1155- *1 4 5*155. *14 1*4
#54-4.
-274-
Ill 11 4* 441 11# 51 *137> 4 M 41 w
314 aay 4- 411 444 #4-
(i) #4 444141 44 4s. 4-41 4^#1 fife 44
<*E3 — 0 (14)
(ii) ZL 44 44
(1) 4-411- 41 44414 444 4411-4 111 11^4 44
<*£3=1 (15) s i- s
iif i
(2) 4-411- 41 41414 4-44 ll#! A#!! 11&4 44
<Zj£3 = —1 (16)
(3) 441 41 41414 4-44 4411-4 414 7>3.1ul &4 44
^3 = 1 ^4-1 (17)
#1 1 (17)1 44 &1 11 W 414# 441 7141 4A131 11. 1 1441 Ai^ 1^ s.£l 4*341 %M! 7141 4# 14# l£# 11*1*1
gji, 44#1 #5£ 7}#41 44 4As. 4*S1-A4 4-7] 11-1 441- 44
41#
"r _ %r (^0 ~-aVe)* + (7p —Vfir^y"* '* i (xo-x^Hyt-y^ (18)
-275-

(19)
v (xq ~x,)x+ (y0 —y,)y4* .nf: -N -v/V ^
(20)
4 7] a] (*0,y0) : 4# 3.^-4 #4 45.
(^.^e) : 4# 3^-4 44 45
(.Xi,yj) : active window 4]4 active cell4 45
Ko^iK&s. • 34 441
r(i,j) : active cell4 4# 3^ 444 44
n : 4444
444 4 (20)o)] ^4^1 ti]E] ^^4 W4- 7W# »J-fAs X4 4
4 ?s@4 44ir #444 ^4, 4&4 ^44 444^4 44.
(21)
4# 4 (21)44 ¥ 44 44 4)44 #4 04 4#4# 4% 4# 4" 5£ # 444 5-47> #4-45.5. A]~g-x>o] ^o)i 4-4- M 444 44# #4
44 #4. 44# 4-4# zl# 84] # 1^4 $14
-276-
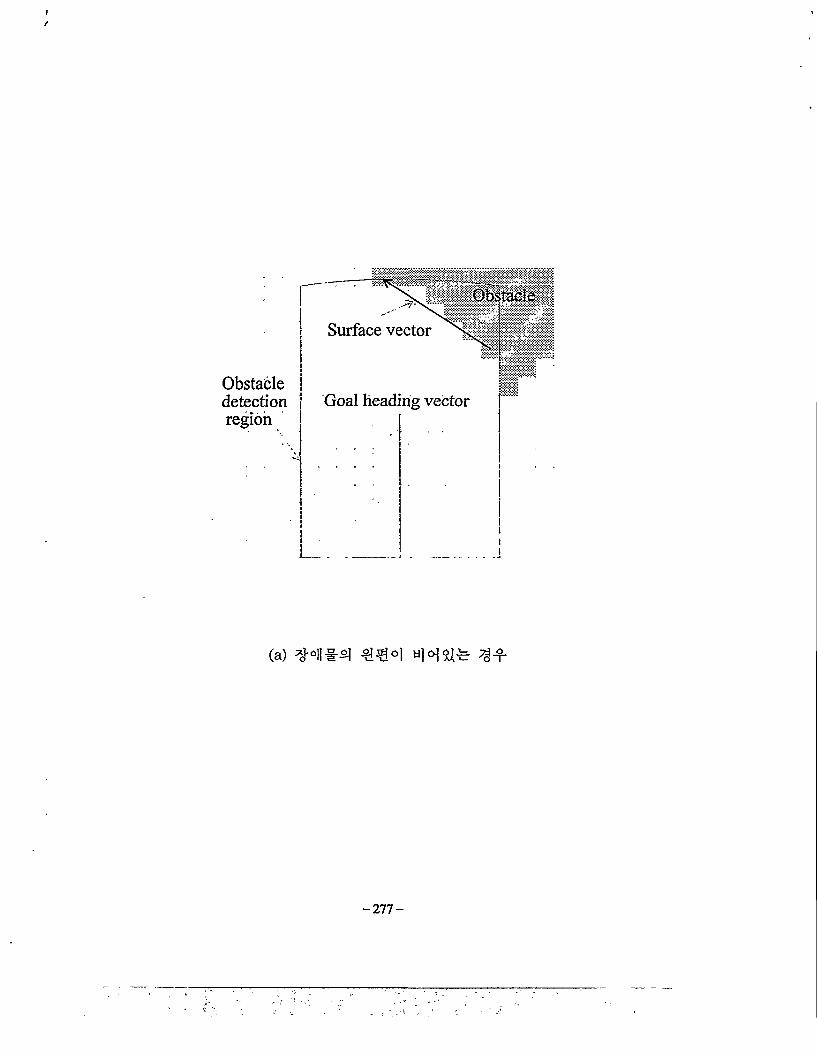
Obstacledetectionregion
Surface vector
Goal heading vector
ii
iiiJ
(a) ##<>) HM&Sr 3-f
-277-
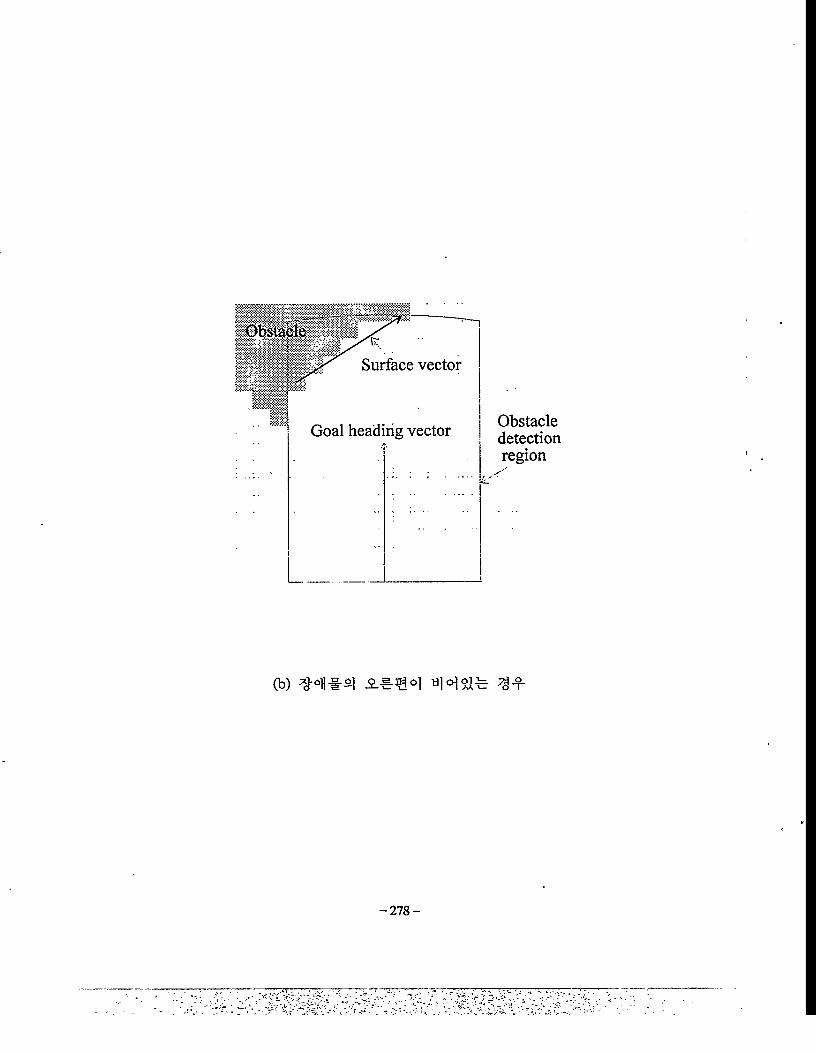
Obstacle
Surface vector
Goal heading vector
(b) «i<Hsa-
-278-
Obstacledetectionregion
3-f
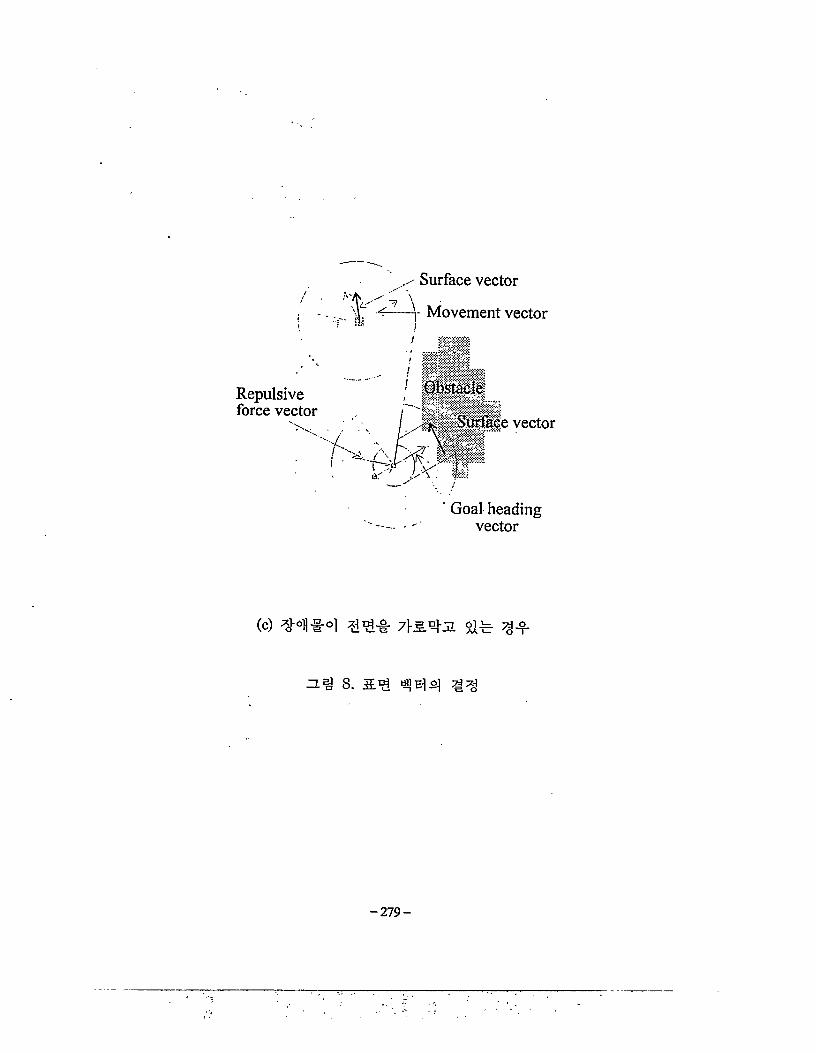
Surface vector- \ •
—V Movement vector
Repulsive force vector
Obstacle
% ' SWace vector
Goal heading vector
(c) ^-^#4 7}^jl $14 34
8. sy -47$
-279-

44 4# 3.^:4 ^*3 4# 3^4 44 #4 47}# 41 a# 444^44 44^. ^4 ti>#44H5. 4#4^.5. 4# s.#4 e4 44# 4--S-4 # 4 #444.
"r$ __rr (%sub 7p)^*“• -V o^-^+tei^s* ‘ 5
^ _ -^H—r°^^_ (23)T'-a-q'&g ~r°meaq
©=niin(y (at/—^o)2 + (3’/—^o)2. V (X--^^"K^r-^)2) (24)
Pm = Wo+A) , |^, +(!-« , J“, (25)
(*p,^p) : 4# 3.#4 44 45.
1j: 4# 5.^4 ## #5#
: SPg 4^r
: active window4 44#
: 44 444 44#
(xz.^z) : 7}# 4#4 444 #4# 4-5
(xr,yr) : 7}# ^-##4 444 #4# 4-5
^0 : ay§ 4#44.
-280-

4 (23)4 X &* 0*4 i AH<q ^4- 7}44, 4# 3.5-°! 4?}#
4] n g}4 444* 4* 4 * $14. 41 4 (22)4 44 i^* 44- 3*
4 7>41- 44- #4 *314 4** 44^4. 4444 444 44 44* 3
44 444 43 441* 44444.
=l*% 94 3l 10* 44 13M34 7fl^4 444 13 4*7Mi 44 14
44 4*3*4 4*4 34 *1 14-44. 44 3-1 94 444 4*3*4 &
4441 (6(0) 44 033 *44* 4*4 44 34 *4 44-* 3i 114 44.
* 4* #444 1W1 4*3*4 4* 43 90" 43 4444 43 *44
* *°1] 441 nonholonomic 44 3433 444 43 *444 * 43 *34
* *44* 34* 4* * * $14. 44 444 44* 443 4*3*41 44
4 M4 437} *4451** 34* 444. 44* #4 zl^ 104 444 3
4 1244* 4*1144 437} 444 4** 4 * $14. 4* 444 4434 4
3 *44 444 4444 444 Ml- 7>4* 4444. * 4 «1 44*
4: 4*3*4 *44 *41 3 4444 43 4443*4 44* 4417} *44
4 4*41 4444 4444* 4# 437} 444* 44 4-444. 4443 4
4 7}4 4441 44 34 *4 *4- 43 *447} 4* **#* 34 * $14
4. 44 414 444 37141 $14 *413 41*4 44 HM4 441* * * $1
4.** *4 4-413* 42} #Ai# 4** *1 4344 43 41144 *M
* 3471 4* 4*3*4 4144 *344. 4# 4414* * 4* 4414 4*
4 3*44, 3 443 43 *444 34 #* 1*41 4# 1*4 3*44.
-281-

=L% 9. ^5. ^1^71# 0]-%-% 3.°\ ^ (1)
-282-
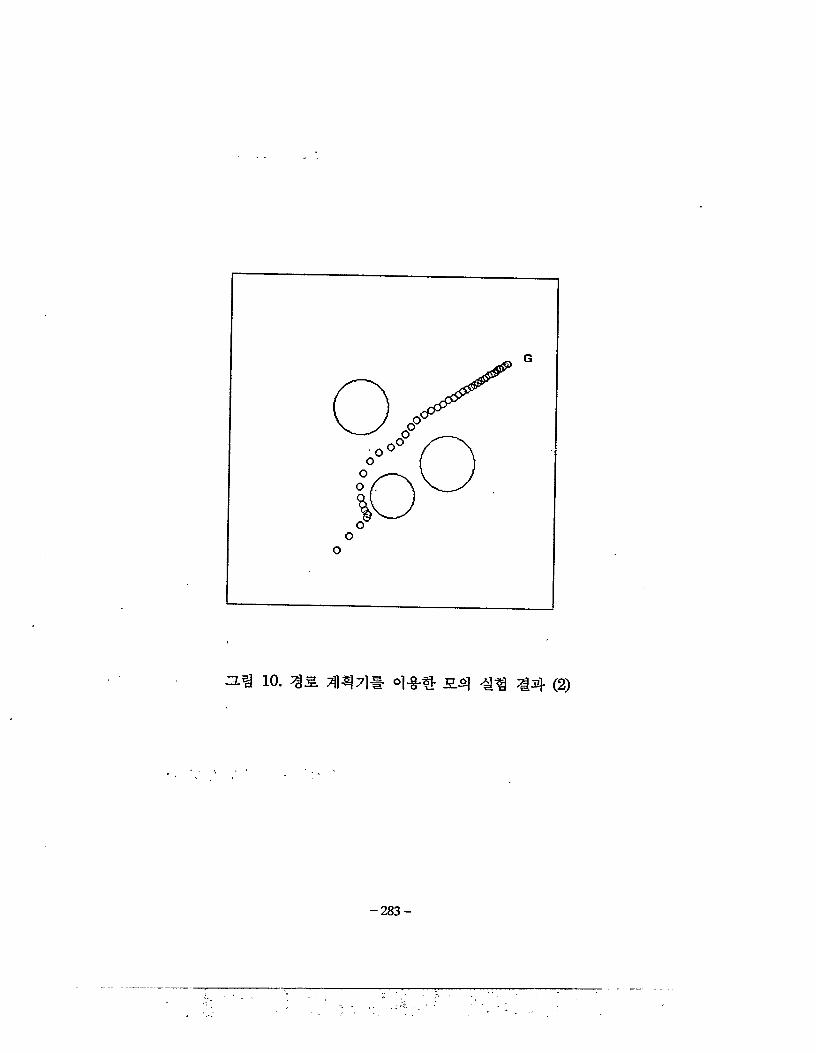
10. %£. 7)1^7]* 2.6) (2)
-283-

t t800
ZLg 11. ZLl 741 4# ^5- ^7]^ S.S) 4^ 44 (l)
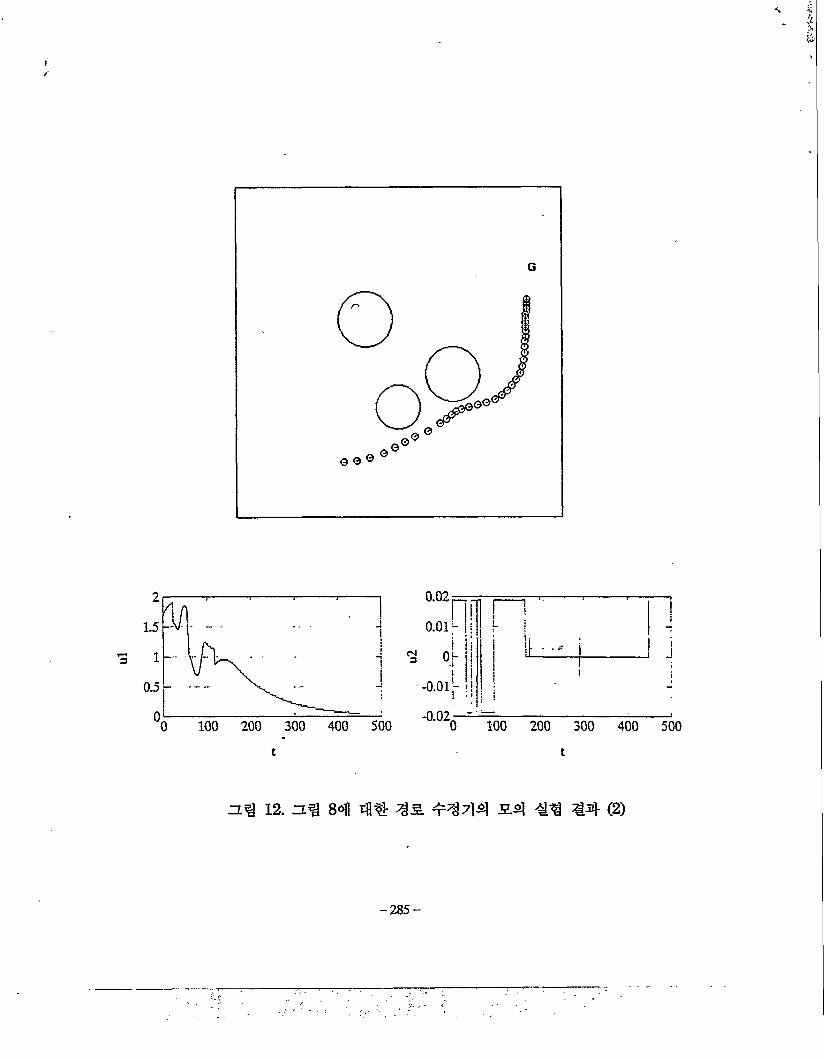
t
0.02==
0.01-
rs3 °M!
i H-0.01 r <!
-0.02—^0
iL
100 200 300t
400 500
12. ZL% 841 W 43. 4^82.4 4^ 44 (2)
-285-
H 5ii ^
# 214s. 4944# 41 #1 444 <8#6)M 4i41# 4#44
4#s#l % %MM1 44 #4# ##4 1, &#! 4459-I 444 44 #
411 41*44 44 ls.4# 4-8-4 4s. 414# 414481. 444 4s. 4
14# 49-41 4)4 2:4# 44 &# 4OT4 4#2#4] 444 #3:44, 4
# 444 4#2#41 1#44 14 4s. #44# 54 14481. 4s. #44
# #4 414 41# 414 #411 1# 942.3.! 4444, #441 4 #3.#
1 ##4 44#41 ### #2.14 &s# 44 144 44# ## 11 54
# 144S4. 414 44# ## 11 54# 1 44 H4 441# 4#4
44#41 4#s#l ##4# #444 s 144 44 #1 ### 1442.3
1 7l#481.
141 41# 2.1 #4# #44 zi #J:4# 8#48s, 41 4 s. #44
1 4#4 144 21 #14 4#441. 4 4 #41 4s. 414s.# 1445. 4 7H41 #4 11# 4#4 4s. Il7l7> 4#!#24 44# #4 4# 11
1 #41 4s. 117H1 His 4#1 # $14. #4 ls.4# 4-8-4 4s. 4
141 4# 4#iss 41 44# 4#4 #4 ##4 ##44 4 #4 21 4
14 41 #7>#41, 444 # 14# 4#44 #4 4#s## 4114 1 1
#4# 144 #914.444 # 49 14M14 3.9-1 44 ls.4# 4#4 4#s#4 4##*S
4D# 71)1482-1, 44] 14=4 4#s## 544 41 5# ##! 4 #2#
4 441 is!## 471)44 4#2#1 %)# #^# #44 €4# 4## 4
# # $1# 144 4444. 44 44 Is.41'41 44# 4#4 4s. 444
1 4#4# 44 13.4# 1#444 14 42 44# 144 #41 4 #2#
1 Til44 3.914, 4# ## 49 14141. 54.44 l2l #4 111 #41
6]£6) fs 4^4 2.A>S>^ 44 fee](fuzzy logic)4 4\y$ 43*M 4ft W
3 43. 4447} ^44 4^ 4*3 7l^ 7HM ^9-342. 49434.
-287-
[1] R. W. Brackett, "Asymptotic Stability and Feedback Stabilization," in
Differential Geometric Control Theory, R. W. Brackett, R. S. Millmann, and
H. J. Sussmann (Eds.), Birkhauser, Boston, pp. 181-191, 1983.
[2] Jean-Paul Laumond, Paul E. Jacobs, Michel Taix, and Richard M. Murray,
"A Motion Planner for Nonholonomic Mobile Robots," IEEE Trans, on Robotics
and Automation, Vol. 10, No. 5, pp. 577-593, Oct., 1994.
[3] Richard M. Murray and S. Shankar Sastry, "Nonholonomic Motion Planning:
Steering Using Sinusoids," IEEE Trans, on Automatic Control, Vol. 38, No. 5,
May, 1993.[4] J. -B. Pomet, 'Explicit Design of Time Varying Stabilizing Feedback Laws for
a Class of Controllable Systems without Drift," System and Control Letters,
Vol. 18, pp. 139-145, 1992.
[5] C. Samson, "Time-varying Feedback Stabilization of Car-like Wheeled Mobile
Robots," International Journal of Robotics Research, Vol. 12, pp. 55-64, 1993.
[6] Alessandro De Luca and Giuseppe Oriolo, "Local Incremental Planning for
Nonholonomic Mobile Robots," Proc. of IEEE Conf. on Robotics and
Automation, pp. 104-110, San Diego, California, May, 1994.
[7] J. Borenstein and Y. Koren, "The Vector Field Histogram - Fast Obstacle
Avoidance for Mobile Robots," IEEE Trans, on Robotics and Automation,
Vol. 7, No. 3, pp. 278-288, 1991.[8] Alexander Zelinsky, "A Mobile Robot Exploration Algorithm," IEEE Trans, on
Robotics and Automation, Vol. 8, No. 6, Dec. 1992.
[9] Marc G. Slack, 'Navigation Templates: Mediating Qualitative Guidance and Quantitative Control in Mobile Robots," IEEE Trans, on Systems, Man, and
Cybernetics, Vol. 23, No. 2, Mar./Apr. 1993.
-288-
[10] Tomas Lozano-Perez and Michael A. Wesley, "An Algorithm for Planning
Collision-Free Paths Among Polyhedral Obstacles," Communication of the
ACM, Vol. 22, No. 10, Oct 1979.
[11] David W. Tank and John J. Hopfield, "Simple "Neural" Optimization Networks
: An A/D Converter, Signal Decision Circuit and a Linear Programming
Circuit" IEEE Trans, on Circuits and Systems, Vol. CAS-33, No. 5, May 1986.
[12] M. K Habib and H. Asama, "Efficient Method to Generate Collision Free
Paths for Autonomous Mobile Robot Based on New Free Space Structuring
Approach," Proc. of IEEE/RSJ Int'l Workshop on Intelligent Robotics ans
Systems IROS '91, Vol. 2, pp. 563-567, 1991.
[13] Robert Sedgewick, "Algorithms," Addison Wesley, 1984.
[14] Mustafa K. Mehmet Ali and Faouzi Kamoun, "Neural Networks for Shortest Path Computation and Routing in Computer Networks," IEEE Trans, on Neural
Networks, Vol. 4, No. 6, Nov. 1993.
[15] J. J. Hopfield and D. W. Tank, ""Neural" Computation of Decisions in
Optimization Problems," Biol. Cybem. 52, 141 152 (1985)
[16] Jihong Lee and Zeungnam Bien, "Collision-free trajectory control for multiple
robots based on neural optimization network," Robotica, Vol. 8, pp. 185-194,
1990.
[17] Herbert E. Rauch and Theo Winarske, "Neural Networks for Routing
Communication Traffic," IEEE Control Systems Magazine, pp. 26-30, Apr. 1988.
[18] Rodney A. Brooks, "Solving the Find-Path Problem by Good Representation of
Free Space," IEEE Trans, on Systems, Man, and Cybernetics, Vol. SMC-14,
No. 3, Mar./Apr. 1983.
[19] 0. Takahashi and R. J. Schilling, "Motion Planning in a Plane Using
Generalized Voronoi Diagram," IEEE Trans, on Robotics and Automation,
Vol. 5, No. 2, pp. 143-150, 1989.
-289-
[20] H. R Beom and H. S. Cho, "Path Planning for Mobile Robot Using Skeleton
of Free Space," Proc. IFAC Symp. Information Control Problems for
Manufacturing, pp. 509-513, Toronto, Canada, May 1992.
-290-
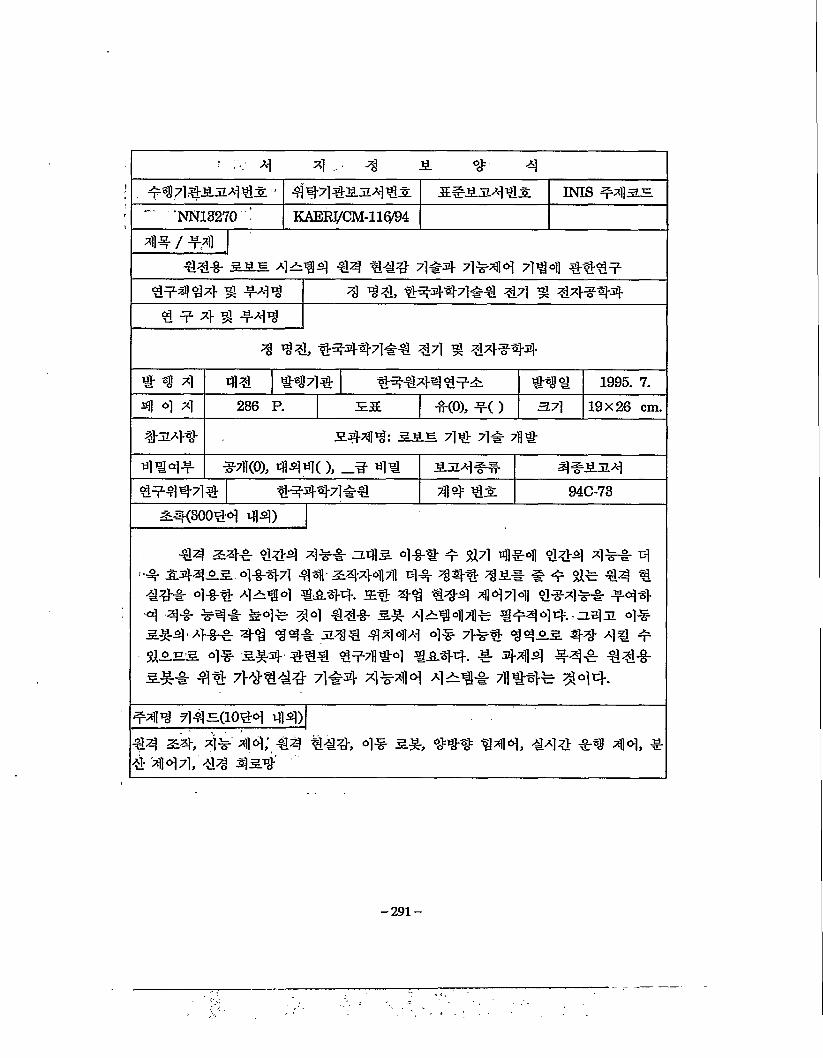
f! :' 4 4 4 5 # 4
^4452.44^ ' 44-44537x^3: 7# 37.4 43: INIS 942c~ NN13270 KAERl/CM-ll§/94
44 / 44449 55^. 44 444 7l#4 719*114 4449
4944x1- ^ ^-44 4 44, 49:4-44 #4 4x1 9 44-944-4 9- x> ^ ti.A^
<9 44, 4944x1^4 4x1 S 4x}944
# € 4 44 4*344 444xM49A 4*34 1995. 7.5)1 O] X| 286 P. JEi 4(0), *() H7l 19 x 26 cm.
#37X1-^- 39*119: Mh 714 xl# 7l]4
4449- 9711(0), til 2} til (), * 44 53X1^ 49531x1
49-4444 494-44#€ 414 43 94C-735*(30094 Lfl4)
44 &44 444 xl99 nrfls. ol-g-t 9 4x1 494 444 xi9#- 4 4- 34453. 494-xl 4# &4-xMl7ll 49 4#4 45* # 4r 2145 44 % 449 4-0-# 4x^4 4394. 3# 94 €94 7110]7l dll 49499 444 4 49 949 949 94 449 5^ 4^4>l]fe 9^449. =l^]jl 4#
94 449 394 41444 49 x}9€ 9455. 44- 4# 4= 45H3 49 5.^4- 4€4 49-4#4 *34-9. # 4-414 949 449 5.44 44 7V4-444 4#4- 44414 4^-ir ;HW4 444.
^44 943(1094 44)€4 5E9, 4 V 44,'. €4 €€4-, 4# 3£, 4=9# €*114, 444: 9*3 44, 4 4 444, 44 45#
-291-
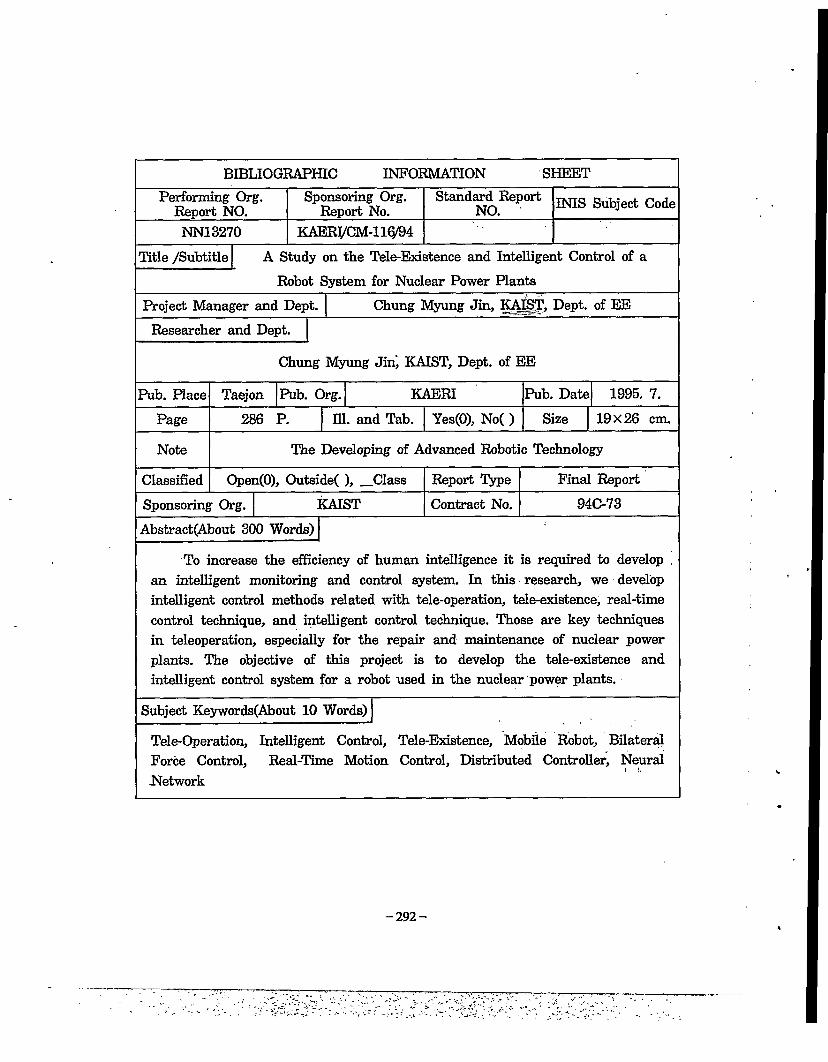
BIBLIOGRAPHIC INFORMATION SHEETPerforming Org.
Report NO.Sponsoring Org.
Report No.Standard Report
NO. INIS Subject Code
NN13270 KAERVCM-11Q/94Title /Subtitle A Study on the Tele-Existence and Intelligent Control of a
obot System for Nuclear Power PlantsRProject Manager and Dept. Chung Myung Jin, KAIST, Dept, of EE
Researcher and Dept.
Myung Jinj KAIST, Dept, of EEChung
Pub. Place Taejon Pub. Org. KAERI Pub. Date 1995. 7.Page 286 P. 111. and Tab. Yes(0), No( ) Size 19x26 cm.
Note The Developing of Advanced Robotic Technology
Classified Open(0), Outside( ),Class Report Type Final ReportSponsoring Org. KAIST Contract No. 94C-73Abstract(About 300 Words)
To increase the efficiency of human intelligence it is required to develop , an intelligent monitoring and control system. In this research, we develop intelligent control methods related with tele-operation, tele-existence, real-time control technique, and intelligent control technique. Those are key techniques in teleoperation, especially for the repair and maintenance of nuclear power plants. The objective of this project is to develop the tele-existence and intelligent control system for a robot used in the nuclear power plants.
Subject Keywords(About 10 Words)
-Existence, Mobile Robot, Bilateral trol, Distributed Controller, Neural
Tele-Operation, Intelligent Control, Tele Force Control, Real-Time Motion Con .Network
-292-
y
to96/6
9W
I/'