Embed Size (px)
Citation preview

TEORIA DE CONTROLE – TCON54
Parte 1Modelagem
Prof. Michael
Modelagem
Professor Michael
1

Introdução - MODELOS
2
Prof. Michael

Introdução - MODELOS
3
Prof. Michael

Modelo Físico
4
Prof. Michael

Nesta Disciplina
• Esta disciplina se concentra na obtenção de modelos teóricos matemáticos:a)Contínuos;b)Invariantes no tempo;c)Parâmetros Concentrados;d)Determinísticos.
5
Prof. Michael
d)Determinísticos.
• Sistemas Estudados:a)Mecânicos;b)Elétricos;c)Fluídicos;d)Térmicos.

Função de Transferência
6
Prof. Michael

Função de Transferência – em Matlab
7
Prof. Michael

Transformada de Laplace
REVISÃO
8
Prof. Michael
http://www.engin.umich.edu/group/ctm/
SITE COM EXEMPLOS DE MODELOS:

Sistemas Mecânicos
As leis fundamentais que governam os sistemas mecânicossão as leis de Newton:
1ª Lei: Todo corpo em repouso ou em movimento tende amanter o seu estado inicial.
2ª Lei: A resultante das forças que agem num corpo é igual
9
Prof. Michael
2ª Lei: A resultante das forças que agem num corpo é igualao produto de sua massa pela sua aceleração.
3ª Lei: Para toda força aplicada existe outra de igual móduloe direção, mas com sentido oposto.

• Elemento de Inércia (Massa)
S.M. – Elementos de Translação (ΣF=ma)
10
Prof. Michael

• Elemento de Amortecimento (Amortecedor)
S.M. – Elementos de Translação (ΣF=ma)
11
Prof. Michael
• Elemento de Elasticidade (Mola)

Sistemas Mecânicos
• Exemplo:
12
Prof. Michael

Sistemas Mecânicos
• Exemplo:
13
Prof. Michael

Sistemas Mecânicos
• Exemplo:
14
Prof. Michael

• Exemplo (Bungee Jump):
Sistemas Mecânicos
15
Prof. Michael

S.M. – Elementos de Rotação (ΣT=Jα)
16
Prof. Michael

S.M. – Elementos de Rotação (ΣT=Jα)
17
Prof. Michael

Sistemas Mecânicos
18
Prof. Michael

Sistemas Elétricos
19
Prof. Michael

Sistemas Elétricos - Elementos
20
Prof. Michael

Sistemas Elétricos
21
Prof. Michael

Analogia – Elétrica x Mecânica
22
Prof. Michael

Sistemas Fluídicos (cap4 Ogata)
23
Prof. Michael

Sistemas Fluídicos
24
Prof. Michael

Sistemas Fluídicos
25
Prof. Michael

Sistemas Fluídicos
26
Prof. Michael

Sistemas Térmico (cap4 Ogata)
27
Prof. Michael
Olhar trabalho feito – No site da disciplina
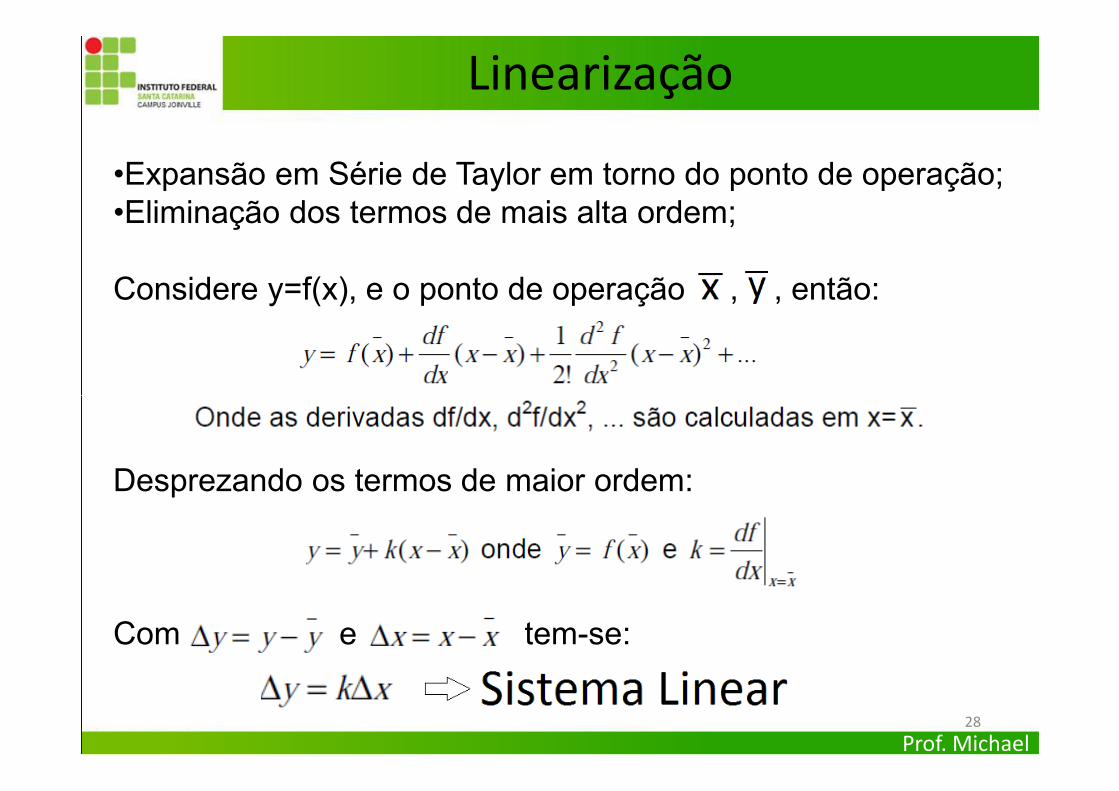
Linearização
•Expansão em Série de Taylor em torno do ponto de operação;•Eliminação dos termos de mais alta ordem;
Considere y=f(x), e o ponto de operação , , então:
28
Prof. Michael
Desprezando os termos de maior ordem:
Com e tem-se:

Linearização
•Para funções de várias variáveis – QUADRO;
Exercícios:
1) Determine a equação linearizada para (sobre o ponto x=2):
29
Prof. Michael
2) Linearize a equação não linear
na região definida por 8<x<10 e 2<y<4

Linearização – Desafio
PENDULO INVERTIDO SOBRE UM CARRO:
30
Prof. Michael
Modelar matematicamente o sistema, linearizar para oponto (Theta=Pi), e obter a função de transferência(Considerar Theta como saída e F como entrada)

• OGATA, Katsuhiko. Engenharia de Controle
Moderno. Editora Prentice Hall, 5 Edição;
• MAYA, Paulo Alvaro, LEONARDI, Fabrizio.
Controle Essencial. Editora Prentice Hall.
REFERÊNCIAS
31
Controle Essencial. Editora Prentice Hall.
• Nise, Norman. Engenharia de Sistemas de
Controle. LTC.
Prof. Michael


















![[Teoria de Controle] Projeto Sintonia de Controlador PID](https://img.dokumen.tips/doc/110x75/577cc4ef1a28aba7119acf20/teoria-de-controle-projeto-sintonia-de-controlador-pid.jpg)










