Embed Size (px)
Citation preview

10/10/2011
1

10/10/2011
2
Control de un proceso en bucle cerrado:
Para poder aplicar el controlador adecuado necesitamos saber cómo se comporta el proceso a lo largo del tiempo.
Cualquier proceso se puede identificar matemáticamente mediante una o varias ecuaciones diferenciales.
Función de transferencia: Relación que existe entre la entrada y salida del proceso.
Transformada de Laplace: Proceso matemático por el cual es posible convertir ecuaciones diferenciales en ecuaciones matemáticas que son más fáciles de manejar.
Controlador e v
Proceso
M
PC
Medida
Propiedades de la transformada de Laplace: La transformada de una función del tiempo f(t) se convierte en una función de la
variable s, F(s). La transformada de la suma o resta de varias funciones del tiempo es la suma o
resta de las transformadas. La transformada del producto de una constante por una función de t es el
producto de dicha constante por la transformada. La transformada de la derivada enésima de una función f(t) es sn veces la
transformada de f(t). La transformada de la integral de la función f(t) es 1/s veces la transformada de
f(t). Transformadas:
Impulso: 1 Escalón unidad: 1/s Rampa: 1/s2
Teorema del valor final:
sFslimtflim0st

10/10/2011
3
Diagramas de bloques: Los diagramas de bloques de un sistema son bloques operacionales y
unidireccionales que representan la función de transferencia de las variables de interés.
Tiene la ventaja de representar en forma más gráfica el flujo de señales de un sistema.
Con los bloques es posible evaluar la contribución de cada componente al desempeño total del sistema.
El diagrama de bloques de un sistema determinado no es único
sX sY sG
Variable de entrada Variable de salida
Diagramas de bloques en bucle cerrado:
G(s)+‐
H(s)
R(s) E(s) C(s)
B(s)
Función de transferencia en bucle abierto G(s)H(s)E(s)
B(s)
Función de transferencia trayectoria directa G(s)E(s)
C(s)
Función de transferencia en bucle cerrado G(s)H(s)1
G(s)
R(s)
C(s)

10/10/2011
4
Régimen transitorio y régimen estacionario:
Sistema contínuox(t) y(t)
x(t)
t
y(t)
t
Régimen transitorio
(t 0)
Régimen estacionario:salida acotada en un pequeño margen
(t )
Grados de estabilidad relativa:x(t)
t
y(t)
t
Estable
x(t)
t
y(t)
t
Estable
x(t)
t
y(t)
t
Críticamente estable
x(t)
t
y(t)
t
Inestable

10/10/2011
5
Especificaciones de funcionamiento para la salida:
y(t)
K1,05K
0,95K
Tiempo de establecimiento
Sobreoscilación
t
x(t)
t
Error de posición
Régimen transitorio
Régimen estacionario
Respuesta B
Respuesta A
B es más estable que A
Influencia en la respuesta transitoria de la situación de polos y ceros: El comportamiento de un sistema viene dado por la función de
transferencia:
‐zi. Ceros de la función de transferencia. ‐pi. Polos de la función de transferencia. Con realimentación H(s):
Igualando a cero el denominador se tiene la ecuación característica cuyas raíces son los polos de la función de transferencia en bucle cerrado.
Los ceros son las raíces del numerador. Los ceros y polos pueden ser reales o parejas de números complejos conjugados.
Condición de estabilidad: los polos han de estar situados en el semiplano complejo que comprende la parte real negativa.
n
1ii
m
1ii
n1n2n
21n
1n
0
m1m2m
21m
1m
0
ps
zsK
asa...sasasa
bsb...sbsbsb
sX
sYsG
sHsG1
sGsGbc
sX sY sG
GC(s)=1 G(s)+
-
X(s) E(s) U(s) Y(s)
H(s)

10/10/2011
6
Calcular los polos y ceros de la siguiente función de transferencia en bucle cerrado y determinar la estabilidad del sistema:
j
21
21
sj21
21
s
1
1s22s
1sG
2bc
Influencia en la respuesta transitoria de la situación de polos y ceros:

10/10/2011
7
Sistemas de primer orden La ecuación diferencial que describe el comportamiento dinámico del
sistema es una ecuación de primer orden.
Función de transferencia:
K. Ganancia del sistema (factor de amplificación entre salida‐entrada)
τ. Constante de tiempo. Nos da una idea de lo rápido o lento que es el sistema en responder. A mayor valor, más lento es el sistema.
SALIDA SISTEMA
ENTRADA txctybdt
tdya
tx ty
1τs
K
bas
c
sX
sYsG
Sistemas de primer orden Respuesta ante entrada escalón de x
unidades:
El régimen permanente tiende a Kx.
T>5τ. Régimen permanente.Matemáticamente la salida alcanza su valor final en un tiempo infinito, pero en el sistema real lo hace en tiempo finito. Para fines prácticos se considera que la salida alcanza el estado estable en cierto porcentaje del valor final. Se suele usar el criterio del 95% (5τ)
Cálculo de τ.
t/τe1Kxtys
x
1τs
KsY
Kx632,0e1Kxτy τ/τ

10/10/2011
8
Modelo de un motor de corriente continua controlado por inducido: Modelo de un sistema de accionamiento: relaciona las órdenes de mando
generadas en la unidad de control con las fuerzas y pares utilizados para producir el movimiento
p 1 2 m
i i 2 p b T 1 2 m
p 1 2 mm
i i 2 p b T 1 2 m
k k ks k
u s R k k Js B k k k k k T s 1
ˆk k k Js Bs T s 1k̂
u s R k k Js B k k k k k T s 1
Sistemas de segundo orden La ecuación diferencial que describe el comportamiento dinámico del
mismo es una ecuación de segundo orden.
Función de transferencia:
SALIDA SISTEMA
ENTRADA txetycdt
tdyb
dt
tyda
2
tx ty
jωσsjωσs
Kω
ωsξω2s
Kω
cbsas
e
sX
sYsG
dd
2n
2nn
2
2n
2
2ac
ba
cω
c
eK
n
jωσjξ1ωξωs
0ωsξω2s
d2
nn12
2nn
2

10/10/2011
9
Sistemas de segundo orden K. Ganancia del sistema en estado estacionario. y=K.x.
ωn. Frecuencia natural no amortiguada. Si no existiera amortiguamiento el sistema oscilaría con esta frecuencia.
ξ. Coeficiente de amortiguamiento. Mide la estabilidad relativa.
σ. Factor de decrecimiento.
Im(s)
Re(s)
s2
s1
-σ
ωd j
-ωd j
cos =ζ
ωn
jωσsjωσs
Kω
ωsξω2s
Kω
cbsas
e
sX
sYsG
dd
2n
2nn
2
2n
2
jωσjξ1ωξωs
0ωsξω2s
d2
nn12
2nn
2
Amortiguamiento cero, ξ = 0 Se tiene un sistema no amortiguado.
En este caso la salida es: tcosω-1Kty n
10/10/2011
10
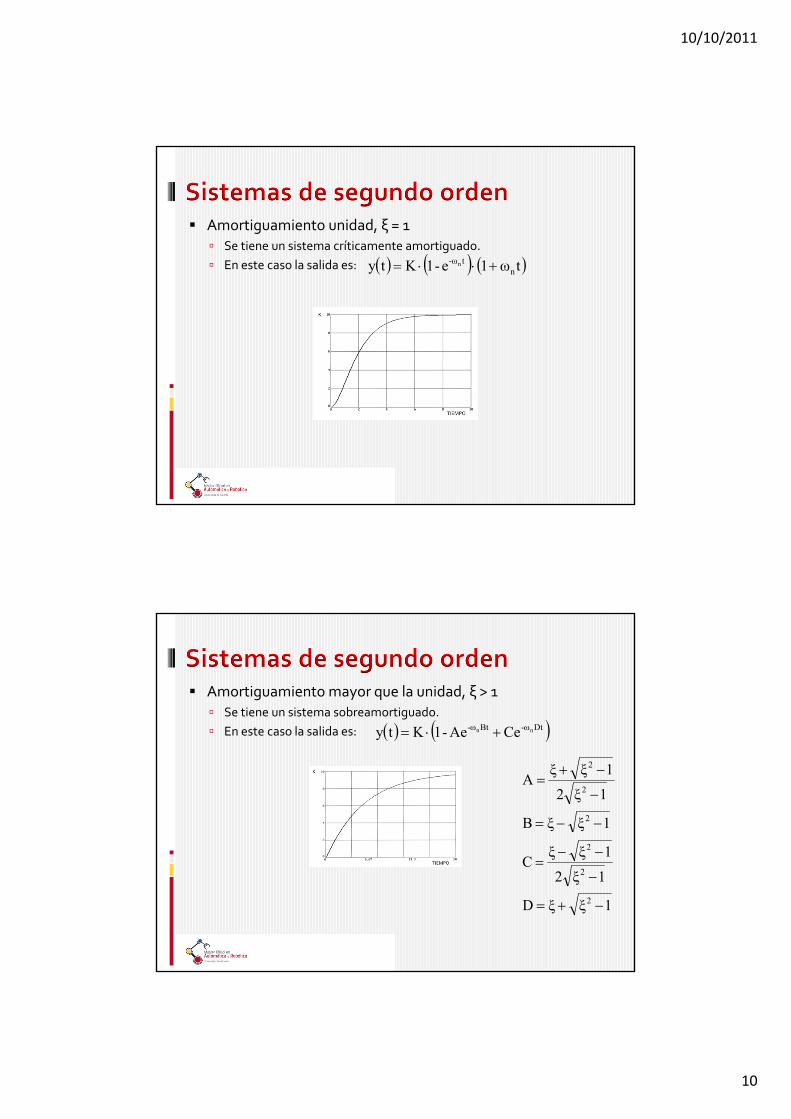
Amortiguamiento unidad, ξ = 1 Se tiene un sistema críticamente amortiguado.
En este caso la salida es: tω1e-1Kty nt-ωn
Amortiguamiento mayor que la unidad, ξ > 1 Se tiene un sistema sobreamortiguado.
En este caso la salida es: Dt-ωBt-ω nn CeAe-1Kty
1ξξD
1ξ2
1ξξC
1ξξB
1ξ2
1ξξA
2
2
2
2
2
2

10/10/2011
11
Amortiguamiento menor que la unidad, 0 < ξ < 1 Se tiene un sistema subamortiguado.
En este caso la salida es:
tξ1ωsin
ξ1
ξtξ1ωcose-1Kty 2
n2
2n
tξω- n
y(t)
K
0,9K
0,1K
1,05K
0,95K
tr
tp
ts
Mpyp
t
100eM
σ
πt
ω
πt
ξ
ξ1arctgα,
ω
απt
dω
πσ
p
s
dp
2
dr
Especificaciones
Ubicación polos
jωσs de
Respuestas dependiendo del coeficiente de amortiguamiento.
10/10/2011
12
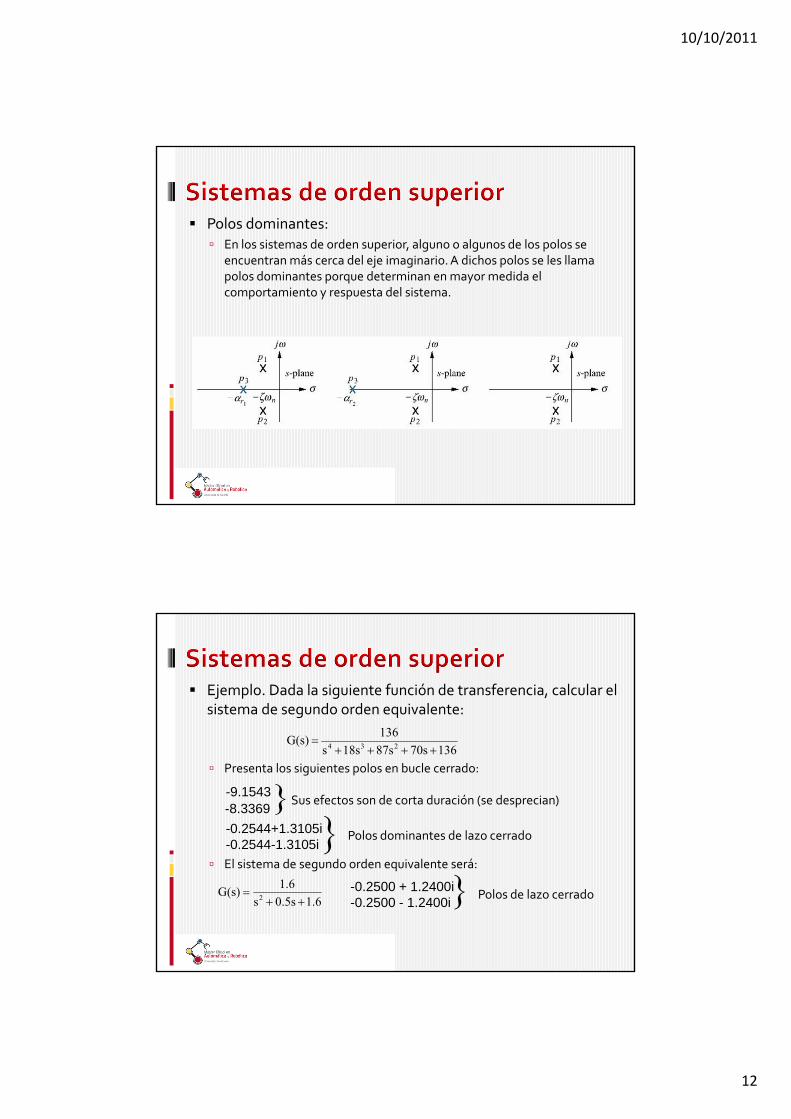
Polos dominantes: En los sistemas de orden superior, alguno o algunos de los polos se
encuentran más cerca del eje imaginario. A dichos polos se les llama polos dominantes porque determinan en mayor medida el comportamiento y respuesta del sistema.
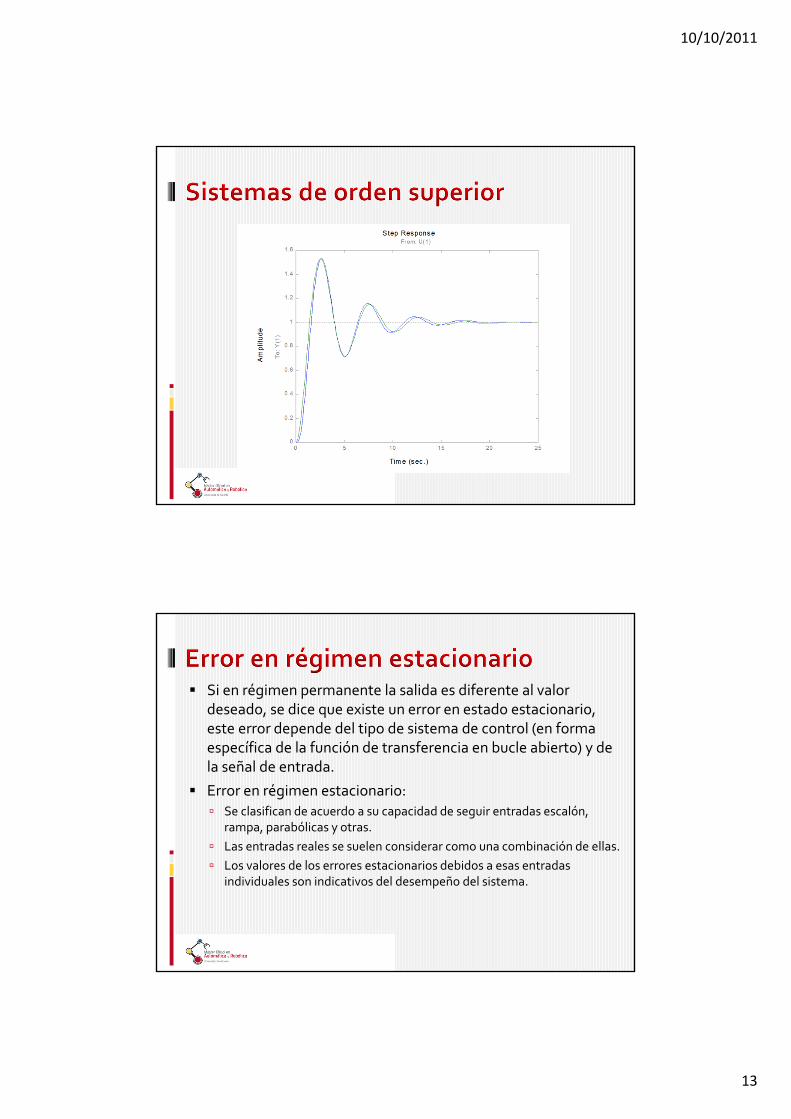
Ejemplo. Dada la siguiente función de transferencia, calcular el sistema de segundo orden equivalente:
Presenta los siguientes polos en bucle cerrado:
El sistema de segundo orden equivalente será:
13670s87s18ss
136G(s)
234
Polos dominantes de lazo cerrado
-9.1543 -8.3369
-0.2544+1.3105i-0.2544-1.3105i
Sus efectos son de corta duración (se desprecian)
-0.2500 + 1.2400i -0.2500 - 1.2400i Polos de lazo cerrado
1.60.5ss
1.6G(s)
2
10/10/2011
13
Si en régimen permanente la salida es diferente al valor deseado, se dice que existe un error en estado estacionario, este error depende del tipo de sistema de control (en forma específica de la función de transferencia en bucle abierto) y de la señal de entrada.
Error en régimen estacionario: Se clasifican de acuerdo a su capacidad de seguir entradas escalón,
rampa, parabólicas y otras.
Las entradas reales se suelen considerar como una combinación de ellas.
Los valores de los errores estacionarios debidos a esas entradas individuales son indicativos del desempeño del sistema.

10/10/2011
14
Considérese la siguiente función de transferencia en bucle abierto:
El esquema de clasificación está basado en la cantidad de integraciones indicadas por la función de transferencia de lazo abierto (es decir el valor de N en sN) Si N=0, el sistema se denomina tipo cero.
Si N=1, el sistema se denomina tipo uno, y así sucesivamente.
Esta clasificación es diferente e independiente a la del orden del sistema.
Al aumentar el número del tipo, disminuye el error en régimen estacionario.
Al disminuir el número del tipo, empeora el problema de estabilidad.
1)s(T1)s1)(Ts(Ts
1)s(T1)s1)(TsK(TG(s)H(s)
p21N
mba
Considérese el siguiente sistema en bucle cerrado:
La señal de error E(s) en Laplace es:
Utilizando el teorema del valor final podemos encontrar el valor final de la señal de error:
Se observa que el valor del error depende tanto del sistema como de la entrada.
G(s)+‐
H(s)
R(s) E(s) C(s)
B(s)
R(s)G(s)H(s)1
1E(s)
G(s)H(s)1
sR(s)limsE(s)lime(t)lime
0s0stes

10/10/2011
15
El error estacionario del sistema, para una entrada escalón unitario (error en posición) es:
Constante de error en posición Kp:
Para un sistema tipo 0:
Para un sistema tipo 1 o superior:
P0s
es K1
1
G(0)H(0)1
1
s
1
G(s)H(s)1
slime
G(0)H(0)G(s)H(s)limK0s
P
K1
1eK
1)s1)(Ts(T
1)s1)(TsK(TlimK es
21
ba
0sP
0e1)s1)(Ts(Ts
1)s1)(TsK(TlimK es
21N
ba
0sP
El error estacionario del sistema, para una entrada rampa unitaria (error en velocidad) es:
Constante de error en velocidad KV:
Para un sistema tipo 0:
Para un sistema tipo 1:
Para un sistema tipo 2 o superior:
sG(s)H(s)limK0s
V
V0s20s
ss K
1
sG(s)H(s)
1lim
s
1
G(s)H(s)1
slime
Ves
21
ba
0sV K
1e0
1)s1)(Ts(T
1)s1)(TssK(TlimK
K
1
K
1eK
1)s1)(Tss(T
1)s1)(TssK(TlimK
Ves
21
ba
0sV
0K
1e
1)s1)(Ts(Ts
1)s1)(TsK(TlimK
Ves
21N
ba
0sV

10/10/2011
16
Resumen:
Error en estado estacionario en términos de la ganancia K
1r(t) tr(t) 2tr(t) Entrada escalón Entrada rampa Entrada aceleración
Sistema tipo 0
Sistema tipo 1
Sistema tipo 2
K1
1
0K
1
0 0K
2
Tema 2. Análisis de sistemas.





























