Embed Size (px)
Citation preview

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
1
Fundamentos de Robótica. Guía 6
Tema: Programación del Robot Mitsubishi. Parte IV. Tiempo de ejecución: 2 horas.
Ejecutar programas que utilizan la mayoría de las instrucciones del lenguaje MELFA BASIC IV de un
robot industrial Mitsubishi.
• Simular las llamadas a programas de un robot Mitsubishi.
• Comprender la forma en que el robot de la Estación de Ensamble con robot Mitsubishi RV-3SB
está programada para realizar su tarea de ensamble de un conjunto de escritorio.
• Modificar el programa para colocar el porta-lapicero y el lapicero en la posición intermedia de la
placa base.
Estación de ensamblaje con robot. La estación de ensamblaje con robot es la responsable de ensamblar las diferentes variantes de un
conjunto de escritorio.
Una vez un conjunto de escritorio se ensambla, los palés necesarios, conteniendo los componentes
necesarios, se solicitan para la colocación en los palés de recepción.
En primer lugar, una placa base se coloca en la posición de montaje, a continuación, el primer
instrumento es montado. Después de montar el primer instrumento, el segundo instrumento es montado
en la misma forma. Los instrumentos vienen del almacén local. 1 porta bolígrafos, de aluminio o
bronce, dependiendo de la orden, se ensambla en la placa de base. El porta bolígrafos viene de un palé.
Al menos un bolígrafo se inserta en el porta bolígrafos, el bolígrafo del almacén local. El conjunto de
escritorio ensamblado se devuelve a su posición de recuperación y se almacena en la estación AS/RS
para su uso posterior.
La estación posee su propio control, que está montado en el bastidor básico de la estación. La unidad de
accionamiento del robot suministra el control.
La comunicación de la unidad de accionamiento hacia la PC con CIROS Production Supervision se da
a través de Ethernet.
Objetivo General
Introducción Teórica
Objetivos específicos
Facultad: Ingeniería.
Escuela: Electrónica
Asignatura: Fundamentos de Robótica
Lugar de ejecución: iCIM Lab.
Edificio 3. Primera planta.

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
2
Fundamentos de Robótica. Guía 6
Si la estación se opera sin el sistema iCIM, en modo "autónomo", es posible realizar la formación sobre
el robot.
Figura 1. Información general de la estación de ensamblaje con robot.
Posición Descripción Posición Descripción
1 Cámara 7 Panel de operación
2 Almacén local de bolígrafos 8 Robot RV-3SB
3 Almacén local 2 9 Módulo de ensamblaje
4 Almacén local 1 10 Soporte de la pieza para visión
5 Caja RIA 11 Recepción del palé
6 Controlador CR2
Funcionamiento Manual: 1. Encienda la fuente de alimentación
2. Restablezca el paro de emergencia (si está disponible)
3. Girar la llave de la consola a Deshabilitar (Disable)
4. Girar la llave en la unidad actuadora CR2 a Auto/Ext
5. Encienda la unidad de actuadora CR2
6. La estación está lista si la lámpara de reinicio (reset) está parpadeando
7. Presione pulsador reset
8. La estación está preparada con el modo de reposición si la lámpara de inicio (start) está parpadeando
9. Pulsar el botón de inicio (Start) para que la estación pase al modo automático
10. Ahora es posible iniciar las tareas a través de Ethernet

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
3
Fundamentos de Robótica. Guía 6
Entradas de la unidad de interfaz del Actuador: Nombre Salida/Entrada Entrada
de la
caja RIA
Salida
de la
caja RIA
Entrada
del robot
PIN Nombre
en el
robot
Panel de
operación
Botón de
ARANQUE
S1
XMG1:13
RIA 1
X1:13
RIA 1
X0:16
INPUT 1
CN100:16
16 IN 1
Botón de PARO S2
XMG1:14
RIA 1
X1:14
RIA 1
X0:17
INPUT 2
CN100:17
17 IN 2
Interruptor
AUTO/MAN
S3
XMG1:15
RIA 1
X1:15
RIA 1
X0:18
INPUT 3
CN100:18
18 IN 3
Botón de
REINICIO
S4
XMG1:16
RIA 1
X1:16
RIA 1
X0:19
INPUT 4
CN100:19
19 IN 4
Estación
del robot
Palé 1
disponible
20B1/I0
XMB2:13
RIA 1
X2:13
RIA 1
X0:20
INPUT 5
CN100:20
20 IN 5
Palé 2
disponible
20B2/I1
XMB2:14
RIA 1
X2:14
RIA 1
X0:21
INPUT 6
CN100:21
21 IN 6
Palé 3
disponible
20B3/I2
XMB2:15
RIA 1
X2:15
RIA 1
X0:22
INPUT 7
CN100:22
22 IN 7
Palé 4
disponible
20B4/I3
XMB2:16
RIA 1
X2:16
RIA 1
X0:40
INPUT 8
CN100:40
40 IN 8
Fijado del
cilindro 1 activo
10B1/I0
XMA2:13
RIA 1
X3:13
RIA 1
X0:41
INPUT 9
CN100:41
41 IN 9
Fijado del
cilindro 1 activo
10B2/I1
XMA2:14
RIA 1
X3:14
RIA 1
X0:42
INPUT 10
CN100:42
42 IN 10
Palé disponible 10B3/I2
XMA2:15
RIA 1
X3:15
RIA 1
X0:43
INPUT 11
CN100:43
43 IN 11
Pieza del
almacén local 1
disponible
10B4/I3
XMA2:16
RIA 1
X3:16
RIA 1
X0:44
INPUT 12
CN100:44
44 IN 12
Pieza del
almacén local 2
disponible
10B5/I4
XMA2:17
RIA 1
X3:17
RIA 1
X0:45
INPUT 13
CN100:45
45 IN 13
Bolígrafo
disponible
10B6/I5
XMA2:17
RIA 1
X3:18
RIA 1
X0:46
INPUT 14
CN100:46
46 IN 14
No usada I6
XMA2:18
RIA 1
X3:19
RIA 1
X0:47
INPUT 15
CN100:47
47 IN 15

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
4
Fundamentos de Robótica. Guía 6
Salidas de la unidad de interfaz del Actuador: Nombre Salida/Entrada Entrada
de la
caja RIA
Salida
de la
caja RIA
Salida del
robot
PIN Nombre
en el
robot
Panel de
operación
Luz de
ARANQUE
H1
XMG1:1
RIA 1
X1:1
RIA 1
X0:4
OUTPUT 0
CN100:4
4 OUT 0
Luz de posición
inicial
H2
XMG1:2
RIA 1
X1:2
RIA 1
X0:5
OUTPUT 1
CN100:5
5 OUT 1
Lámpara de la
función especial
1
H3
XMG1:3
RIA 1
X1:3
RIA 1
X0:6
OUTPUT 2
CN100:6
6 OUT 2
Lámpara de la
función especial
2
H4
XMG1:4
RIA 1
X1:4
RIA 1
X0:7
OUTPUT 3
CN100:7
7 OUT 3
Estación
del robot
Quita las pinzas
de sujeción de
los cilindros 1+2
10M1/O0
XMA2:1
RIA 1
X3:1
RIA 1
X0:29
OUTPUT 4
CN100:29
29 OUT 4
Coloca las
pinzas de
sujeción de los
cilindros 1+2
10M2/O1
XMA2:2
RIA 1
X3:2
RIA 1
X0:30
OUTPUT 5
CN100:30
30 OUT 5
No usada O2
XMA2:3
RIA 1
X3:3
No usada O3
XMA2:4
RIA 1
X3:4
No usada O4
XMA2:5
RIA 1
X3:5
No usada O5
XMA2:6
RIA 1
X3:6
No usada O6
XMA2:7
RIA 1
X3:7
No usada O7
XMA2:8
RIA 1
X3:8
Documentación de los programas para los controladores CR1 y CR2 con Ethernet. La estructura básica consiste de un programa principal “Main.MB4” el cual se inicia inmediatamente en
la ranura 2 (Slot 2) después de encender el robot. Esto es causado por la entrada ALWAYS en el
parámetro de ranura SLT2. (Véase también: Parámetros). Después de la inicialización y arranque en el
modo automático de la estación, es posible poner en marcha las tareas en la ranura 1 (Slot 1) a través de
Ethernet. Estas tareas pueden consistir en más de 3 parámetros, respectivamente, a aceptar y devolver.
Estos parámetros a recibir/devolver son las variables globales M_00-M_02. Antes de iniciar la tarea a
través de Ethernet, los valores son escritos en estas variables y al final de la tarea, estos valores se leen

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
5
Fundamentos de Robótica. Guía 6
de nuevo. Las tareas deben tener una estructura determinada para que CIROS Production sea capaz de
llamarla a través de Ethernet (Véase también: Estructura de la tarea).
Variables Globales: M_00: Enviar/Recibir el parámetro 1
M_01: Enviar/Recibir el parámetro 2
M_02: Enviar/Recibir el Parámetro 3
M_10: Automático activo
M_11: Estación lista con reinicio
M_12: Parada de emergencia activo
M_19: variable del protocolo (Handshake)
Parámetros: Los siguientes parámetros deben establecerse para configurar una unidad de accionamiento CR2 nueva.
Después de esto la unidad de accionamiento CR2 debe ser apagada y encendida de nuevo.
Parámetros Ethernet:
• NETIP: 192.168.10.11
• NETPORT: 9000,9001,9002,9003,…
Parámetros E/S:
• START: -1, -1
• ERRRESET: -1, -1
• SRVOFF: -1, -1
• SRVON: -1, -1
• IOENA: -1, -1
Parámetros de Slot:
• SLT 1: ,CYC,START,1
• SLT 2: MAIN.MB4,CYC,ALWAYS,1
• SLT 3: ,CYC,START,1
• SLT 4: ERR.MB4,CYC,ERROR,1
• SLT 5: ,CYC,START,
• ALWENA: 7
NOTA:
Para poder cargar el programa Main.MB4 en el controlador CR2, nuevamente el parámetro de ranura
STL 2 debe ser cambiado a Always en el arranque.
Después de esto apague la unidad de accionamiento y vuelva a encenderla.
El programa Main.Mb4 puede cargarse con toda normalidad de nuevo ahora.
Después de esto revierta los cambios en el parámetro de ranura SLT 2, apague y encienda la unidad de
accionamiento de nuevo.
Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
6
Fundamentos de Robótica. Guía 6
Tareas principales: Estos programas deben cargarse en la unidad de control del accionamiento. Los programas Main.MB4 y
ERR.MB4 que pueden cargarse sin cambios. Init.MB4 es una tarea adaptada a la aplicación. En la tarea
TOUT.MB4 el periodo de tiempo (DLY) debe adaptarse a la aplicación.
• MAIN.MB4
• INIT.MB4
• ERR.MB4
• TOUT.MB4
Estructura de la tarea: Para llamar a las diferentes tareas específicas de aplicación desde CIROS Production las tareas deben
tener una estructura específica. El siguiente protocolo HShake1 debe estar integrado en la cabecera del
programa. El verdadero protocolo se lleva a cabo sobre la variable global M_19. CIROS Production
espera por el valor hexadecimal 55 y luego el valor 00 se escribe en M_19. El resto del código fuente
llama a la tarea TOUT (Tiempo de espera) en la ranura de 5 (Slot 5) y luego la variable global M_10
revisa si la estación está en modo automático.
490 *HShake1
500 M_19=&H55
510 wait M_19=&H00
520 IF M_PSA(5) = 0 THEN
530 XSTP 5
540 WAIT M_WAI(5) = 1
550 XRST 5
560 ENDIF
570 WAIT M_PSA(5) = 1
580 XLOAD 5,"TOUT"
590 XRUN 5,"TOUT",1
600 IF M_10 = 0 THEN
610 M_00 = 10
620 GOTO *HShake2
630 ENDIF
El siguiente protocolo debe estar disponible para Hshake2 al final de la tarea.
Aquí la tarea TOUT ha terminado y el procedimiento del protocolo se lleva a cabo a través de la
variable global M_19.
1360 *HShake2
1370 XSTP 5
1380 M_19=&HAA
1390 Wait M_19=&H00
1400 END
Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
7
Fundamentos de Robótica. Guía 6
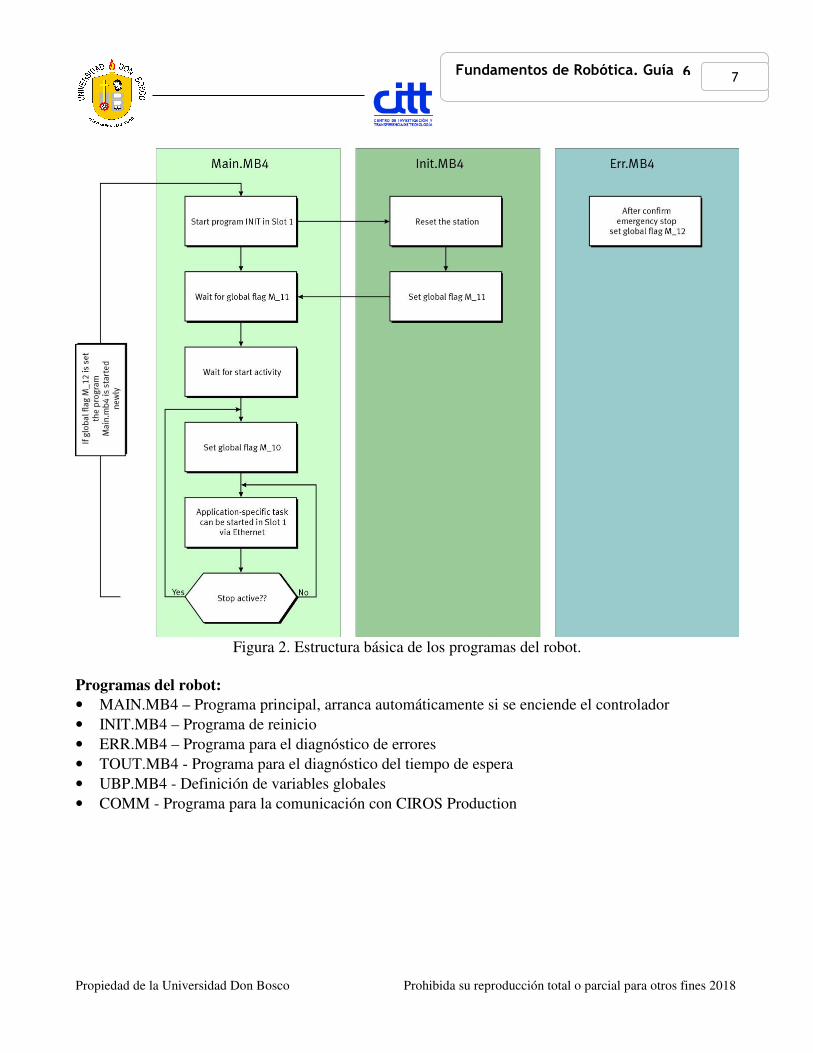
Figura 2. Estructura básica de los programas del robot.
Programas del robot: • MAIN.MB4 – Programa principal, arranca automáticamente si se enciende el controlador
• INIT.MB4 – Programa de reinicio
• ERR.MB4 – Programa para el diagnóstico de errores
• TOUT.MB4 - Programa para el diagnóstico del tiempo de espera
• UBP.MB4 - Definición de variables globales
• COMM - Programa para la comunicación con CIROS Production

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
8
Fundamentos de Robótica. Guía 6
Posiciones/Tareas del programa “MP” mover palé (Move Palette) del robot RV3SB. Este programa sirve, por ejemplo, para mover el palé desde el sistema de banda transportadora a la base
para palés 1 de la estación.
Figura 3. Posiciones del programa “MP”.
Posiciones del robot para el programa “MP”
1 PINIT
2 PPAL(15)
3 PPAL(1)
4 PPAL(2)
5 PPAL(3)
6 PPAL(4)

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
9
Fundamentos de Robótica. Guía 6
Posiciones/Tareas del programa “MBP” mover placa base (Move Base Plate) del robot RV3SB. Este programa sirve, por ejemplo, para cargar una placa base en la posición de ensamble.
Figura 4. Posiciones del programa “MBP”.
Posiciones del robot para el programa “MBP”
1 PINIT
2 PBP(5)
3 PBP (1)
4 PBP (2)
5 PBP (3)
6 PBP (4)

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
10
Fundamentos de Robótica. Guía 6
Posiciones/Tareas del programa “MPH” mover porta lapiceros (Move pen holder)
Figura 5. Posiciones del programa “MPH”.
Posiciones del robot para el programa “MPH”
1 PINIT
2 PPH(5)
3 PPH(1)
4 PPH(2)
5 PPH(3)
6 PPH(4)

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
11
Fundamentos de Robótica. Guía 6
Posiciones/Tareas del programa “MINST” mover instrumento (Move instrument) Este programa sirve, por ejemplo, para insertar un porta lapiceros en la placa base.
Figura 6. Posiciones del programa “MINST”.
Posiciones del robot para el programa “MINST”
1 PINIT
2 PASM(2)
3 PASM(1)
4 PTEST
5 PFD(1)
6 PFD(2)

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
12
Fundamentos de Robótica. Guía 6
Posiciones/Tareas del programa “ASMP” ensamble del lapicero (Assemble pen) Este programa sirve para insertar un lapicero en el porta lapicero.
Figura 7. Posiciones del programa “ASMP”.
Posiciones del robot para el programa “ASMP”
1 PINIT
2 PPASM
3 PPFD
1 Computadora personal o portátil con Windows.
1 Software CIROS Robotics
Parte I. Programa para el control de la estación de ensamble en CIROS Robotics. 1. Descargue la carpeta comprimida “StationAssemblyRV3SB.rar” con los archivos que necesitará en
la práctica.
2. Descomprima la carpeta en su computadora.
Procedimiento
Materiales y equipos

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
13
Fundamentos de Robótica. Guía 6
3. Ejecute el programa CIROS Robotics.
4. Abra el modelo StationAssemblyRV3SB.MOD, que se encuentra dentro de la carpeta model. 5. Compile el programa y ejecútelo.
6. Describa lo que hace programa:
________________________________________________________________________________
________________________________________________________________________________
________________________________________________________________________________
________________________________________________________________________________
________________________________________________________________________________
________________________________________________________________________________
Parte II. Modificación del programa. 7. Modifique el programa para que se coloque el porta-lapicero y un bolígrafo en la posición
intermedia de la placa base.
SUGERENCIA: Al cambiar la posición del medidor y del portalapicero debe modificar
intercambiando las propiedades Extended de los Gripper Points de los Hole3 y Hole2 de la
Baseplate para que se unan los Intruments y los Penholders a la placa base.
Figura 8. Propiedades de los Gripper Points de las cajeras de la placa base.

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
14
Fundamentos de Robótica. Guía 6
Figura 9. Cambio de la Propiedad Extended para que añada Instruments en donde había
Penholders y viceversa. No olvide cambiar la posición en donde sujetará el conjunto de escritorio completo para que el
robot no choque con el portalapicero y el bolígrafo al tomarlo, además de revisar la posición de sus
Grip points de la base (Grip plate 1 y Grip plate 2) para que pueda ser tomado todo el conjunto de
escritorio (consulte el Anexo de esta guía).
8. Presente a su docente el programa modificado funcionando.
9. Salga del programa y apague la computadora.
1. Modifique el programa para que ahora se desarme el conjunto de escritorio original, cinco segundos
después de armarlo; los medidores de temperatura y humedad relativa, así como el lapicero se
deben dejar sobre la mesa en posiciones que usted defina, el portalapiceros deberá quedar es su
pallet respectivo.
� Manual iCIM Robot assembly, vision station
Edición: 03/2010
Autor: Schober
Artes gráficas: Schober
Maquetación: Schober
FESTO Didactic
Bibliografía
Análisis de resultado

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
15
Fundamentos de Robótica. Guía 6
Hoja de cotejo: 6
Guía 6: Programación del Robot Mitsubishi. Parte IV.
Estudiante: Estación No:
Docente: GL: Fecha:
EVALUACION
% 1-4 5-7 8-10 Nota
CONOCIMIENTO
25% Conocimiento
deficiente de las
tareas del robot
Mitsubishi RV-3SB
de la estación de
ensamble de
conjuntos de
escritorio.
Conocimiento y
explicación
incompleta de
los fundamentos
teóricos.
Conocimiento
completo y
explicación clara
de los
fundamentos
teóricos de las las
tareas del robot RV-
3SB.
APLICACIÓN DEL CONOCIMIENTO
30%
40%
No realizó la
simulación de la
parte I.
No creó el programa
de la Parte II.
Necesitó la ayuda
del docente de
laboratorio
Necesitó la ayuda
del docente de
laboratorio
Realizó la
simulación de la
Parte I de la guía de
laboratorio.
Hizo el programa de
la Parte II.
ACTITUD
3% No tiene
actitud
proactiva.
Participa
ocasionalmente o lo
hace constantemente
pero sin coordinarse
con su compañero.
Tiene actitud
proactiva y
sus propuestas
son concretas y
factibles.
2%
No es ordenado ni
responsable en el uso del
equipo
Solo es ordenado o
solo responsable con
el uso del equipo
Es ordenado y
responsable en el uso
del equipo
TOTAL
100%

Propiedad de la Universidad Don Bosco Prohibida su reproducción total o parcial para otros fines 2018
16
Fundamentos de Robótica. Guía 6
ANEXO:
Modelado de objetos “agarrables”
Mientras la pinza está cerca, revisa si hay una pieza agarrable cerca de ella. Si se encuentra una pieza, el
acercamiento será detenido tan pronto como el punto de agarre de la pinza alcanza el plano z=0 del punto
de agarre más cercano.
Esto requiere:
• Que la pieza tenga puntos de agarre en cualquier punto de contacto (siempre necesitará un par para
estar seguro que ambos dedos de la pinza se detengan en la posición deseada).
• La orientación de todos los puntos debe escogerse de manera que se garantice que los puntos de agarre
de la pinza se acerquen verticalmente al plano z=0 del punto de agarre de la pieza (El eje z del sistema
de coordenadas de los puntos de agarre de la pinza debe apuntar directamente desde la pieza de
trabajo hacia la pinza)
Las siguientes figuras muestran pequeños ejemplos de una caja que debe ser agarrada desde su interior y
de un cilindro que puede ser agarrado desde su exterior:
El desplazamiento entre la geometría y los puntos de agarre en la figura de la izquierda es exactamente
el ancho de los dedos de la pinza. Este desplazamiento es necesario, debido a que los puntos de agarre
de la pinza están modelados en el interior de la pinza.





























