Embed Size (px)
Citation preview

TEHNIČKO VELEUČILIŠTE U ZAGREBU
PREDDIPLOMSKI STRUČNI STUDIJ MEHATRONIKE
Marko Boršić
Upravljanje brzinom vrtnje sinkronog motora s
permanentnim magnetima
ZAVRŠNI RAD br.3
Zagreb, srpanj 2014.
TEHNIČKO VELEUČILIŠTE U ZAGREBU
PREDDIPLOMSKI STRUČNI STUDIJ MEHATRONIKE
Marko Boršić
JMBAG: 0246038924
Upravljanje brzinom vrtnje sinkronog motora s
permanentnim magnetima
ZAVRŠNI RAD br.3
Zagreb, srpanj 2014.

Zahvaljujem se svom mentoru dr.sc. Toniju
Bjažiću na strpljenju, pomoći i vodstvu pri izradi ovog rada.
Također, zahvaljujem se svojim roditeljima, obitelji i najbližnjima na potpori i
vjeri u mene.

Sadržaj
1 Uvod ..................................................................................................................... 1
2 Vektorsko upravljanje sinkronim motorom s permanentnim magnetima .............. 3
2.1 Model sinkronog motora s permanentnim magnetima u dq koordinatnom
sustavu .................................................................................................................... 3
2.2 Ekvivalencija sinkronog motora s permanentnim magnetima i istosmjernog
motora ..................................................................................................................... 5
3 Opis elektromotornog pogona .............................................................................. 7
4 Programski paket Starter ................................................................................... 14
4.1 Uspostava komunikacije .............................................................................. 14
4.2 Sadržaj korisničkog sučelja ......................................................................... 16
4.3 Stvaranje projekta ........................................................................................ 16
4.4 Parametriranje pretvarača za rad sa sinkronim strojem .............................. 18
4.5 Puštanje sustava u rad ................................................................................ 25
4.6 Snimanje signala ......................................................................................... 31
4.7 Završetak rada............................................................................................. 33
5 Testiranje i simuliranje elektromotornog pogona ................................................ 34
5.1 Parametri elektromotornog pogona ............................................................. 34
5.2 Rezultati testiranja i simuliranja ................................................................... 39
6 Optimizacija elektromotornog pogona ................................................................ 43
6.1 Projektiranje regulatora struje ...................................................................... 44
6.2 Projektiranje regulatora brzine vrtnje ........................................................... 46
6.3 Rezultati testiranja ....................................................................................... 49
7 Zaključak ............................................................................................................ 61

8 Literatura ............................................................................................................ 62
9 Sažetak .............................................................................................................. 64
10 Abstract .............................................................................................................. 65
11 Životopis ............................................................................................................. 66

1
1 Uvod
Posljednjih dvadesetak godina naglo se povećava primjena električnih motora
s permanentnim magnetima na rotoru. Razlog tome leži u pronalasku kvalitetnih
magnetskih materijala s visokom koncentracijom magnetske energije po jedinici
volumena te smanjenju cijena i razvoju pretvarača s visokim sklopnim frekvencijama.
Pojavljivanjem bržih i jeftinijih procesora za obradu signala postalo je moguće i
praktično primijeniti napredne upravljačke algoritme na izmjeničnim motorima, čime
se postižu ista upravljačka svojstva kao kod istosmjernih elektromotornih pogona.
Prednosti sinkronih motora s permanentnim magnetima u kombinaciji s brzo
padajućim cijenama, dovele su do njihove široke primjene: alatni strojevi, kućanski
aparati, robotski aktuatori i slično [3].
U drugom poglavlju ovog rada dan je model sinkronog motora s permanentnim
magnetima te je uspoređen s modelom istosmjernog motora s nezavisnom i
konstantnom uzbudom.
Elektromotorni pogon zasnovan na Siemensovom Sinamics S120
modularnom sustavu za aplikacije visokih performansi opisan je u trećem poglavlju.
Dan je pregled glavnih komponenti s njihovim karakteristikama.
Upute za rad s programskim paketom Starter dane su u četvrtom poglavlju.
Opisano je parametriranje pogona, pokretanje identifikacijske rutine te puštanje
elektromotornog pogona u rad. Opisano je i snimanje signala te završetak rada.
U petom poglavlju dani su bitni parametri pogona, dobiveni na temelju
proračuna, kataloških podataka te dijagnostičkih rezultata, koji se koriste za
simulacije u programskom paketu Matlab-Simulink te optimizaciju elektromotornog
pogona. Prikazani su rezultati eksperimentalnog testiranja i simuliranja u Simulinku,
uz početne parametre pogona.

2
Optimizacija elektromotornog pogona prikazana je u šestom poglavlju.
Projektiran je regulator struje (momenta) korištenjem Bodeovog prikaza
frekvencijskih karakteristika i tehničkog optimuma. Regulator brzine vrtnje projektiran
je korištenjem Bodeovog prikaza frekvencijskih karakteristika i simetričnog optimuma.
Prikazani su rezultati optimizacije.

3
2 Vektorsko upravljanje sinkronim motorom s permanentnim
magnetima
U ovom poglavlju dan je model sinkronog motora s permanentnim magnetima
(SMPM-a) pogodan za vektorsko upravljanje. Napravljena je ekvivalencija s modelom
istosmjernog motora s nezavisnom i konstantnom uzbudom.
2.1 Model sinkronog motora s permanentnim magnetima u dq
koordinatnom sustavu
Prema [2] i [3] model sinkronog motora s permanentnim magnetima pogodan
za primjenu vektorskog upravljanja, dobiva se prebacivanjem veličina motora (faznih
struja, napona te induciranog napona) iz trofaznog a,b,c, koordinatnog sustava u d,q
koordinatni sustav.
Transformacija vektora iz sustava u sustav provodi se Clarkeovom
transformacijom:
(2-1)
Inverzna Clarkeova transformacija:
(2-2)
Transformacija vektora iz sustava u sustav provodi se Parkovom
transformacijom:
(2-3)
gdje je - električni kut rotora. Inverzna Parkova transformacija:
(2-4)
Na slici 2.1. grafički su prikazane Clarkova i Parkova transformacija.

4
Vektorskim upravljanjem SMPM-om postiže se linearna dinamika istosmjernog
motora. Kako bi se SMPM mogao promatrati kao istosmjerni motor potreban je model
motora u koordinatnom sustavu (dalje se koristi kratica KS). Taj se model dobije
tako da se model u KS-u Clarkeovom transformacijom prebaci u KS, a
onda iz KS - a u KS.
Slika 2.1 Grafički prikaz Clarkeove i Parkove transformacije, [1]
Konačni model SMPM-a u sustavu je sljedeći:
(2-5)
(2-6)
(2-7)
- komponenta rezultirajućeg vektora faznih napona na d - osi, [V]
- komponenta rezultirajućeg vektora faznih napona na q - osi, [V]
- otpor jedne faze motora, [ ]
- induktivitet motora u KS-u, [H]
- komponenta rezultirajućeg vektora faznih struja na d - osi, [A]
- komponenta rezultirajućeg vektora faznih struja na q - osi, [A]

5
- električna brzina rotora, [rad/s]
- (konstantan) magnetski tok permanentnih magneta, [Wb]
- broj pari polova motora
- elektromagnetski moment motora, [Nm]
2.2 Ekvivalencija sinkronog motora s permanentnim magnetima i
istosmjernog motora
Iz dobivenih izraza (2-5), (2-6) i (2-7) može se vidjeti da, ako se struja
regulacijom održava na nuli, SMPM ima istu dinamiku kao i istosmjerni stroj.
Upravljanje elektromagnetskim momentom odvija se upravljanjem strujom jer uz
vrijedi:
(2-8)
(2-9)
(2-10)
Na slici 2.2. prikazan je model SMPM-a temeljen na izrazima (2-8), (2-9) i (2-
10) .
Slika 2.2 Model sinkronog motora s permanentnim magnetima
6
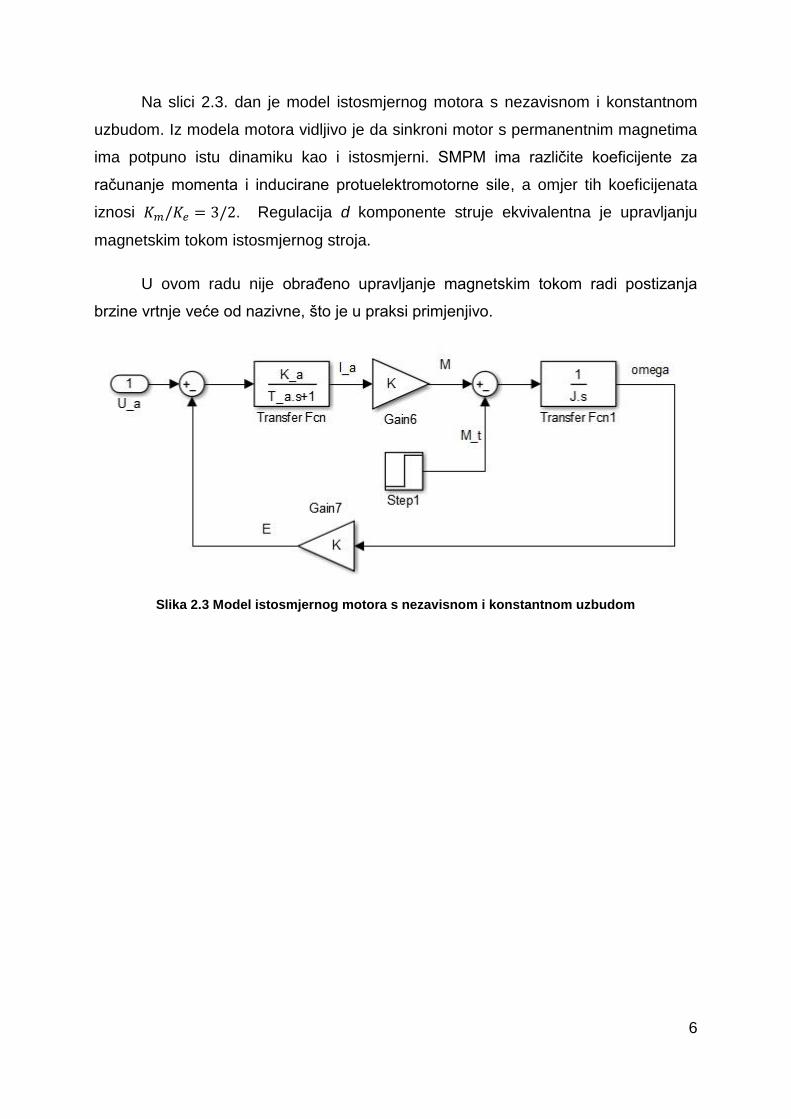
Na slici 2.3. dan je model istosmjernog motora s nezavisnom i konstantnom
uzbudom. Iz modela motora vidljivo je da sinkroni motor s permanentnim magnetima
ima potpuno istu dinamiku kao i istosmjerni. SMPM ima različite koeficijente za
računanje momenta i inducirane protuelektromotorne sile, a omjer tih koeficijenata
iznosi . Regulacija d komponente struje ekvivalentna je upravljanju
magnetskim tokom istosmjernog stroja.
U ovom radu nije obrađeno upravljanje magnetskim tokom radi postizanja
brzine vrtnje veće od nazivne, što je u praksi primjenjivo.
Slika 2.3 Model istosmjernog motora s nezavisnom i konstantnom uzbudom

7
3 Opis elektromotornog pogona
Fizički izgled elektromotornog pogona zasnovanog na Sinamics S120 sustavu
prikazan je na slici 3.1.
Slika 3.1 Elektromotorni pogon
Upravljačka jedinica
Radi se o upravljačkoj jedinici CU320-2 PN koja raspolaže sa sučeljem kao
što je prikazano u tablici 3.1. Pregled upravljačke jedinice dan je na slici 3.2.

8
3.1 Specifikacija upravljačke jedinice CU320-2 PN
Vrsta Količina
Digitalni ulazi 12
Digitalni ulazi/izlazi 8
DRIVE-CLiQ sučelje 1
LAN (Ethernet) 1
Sučelje za mjerenje 3
Slika 3.2 Upravljačka jedinica CU320-2 PN

9
Pretvarač
Pretvarač je prikazan na slici 3.3, a njegova specifikacija dana je u tablici 3.2.
3.2 Specifikacija pretvarača PM340
Ulaz 1AC 200-240V, 50/60 Hz
Izlaz 3AC, 2,3A (0,37kW)
Hlađenje unutarnje zračno
Masa 1,2 kg
Slika 3.3 Pretvarač PM340

10
Sinkroni motor s permanentnim magnetima
Sinkroni motor s permanentnim magnetima 1FK7 za SINAMICS S120 (slika
3.4) sa specifikacijom prema tablici 3.3.
Slika 3.4 Sinkroni motor s permanentnim magnetima
3.3 Specifikacija motora 1FK7 za Sinamics S120
Prirodno hlađenje
Na narednim stranicama prikazane su sheme elektromotornog pogona.

11

12

13

14
4 Programski paket Starter
Programski paket (korisničko programsko sučelje) Starter koristi se za
parametriranje, testiranje, optimizaciju, dijagnostiku i puštanje u rad pretvarača
Siemens, Micromaster i Sinamics [6].
U ovom poglavlju dane su upute za rad s programskim paketom Starter V4.3,
parametriranje i puštanje u rad pretvarača Sinamics S120 i sinkronog motora s
permanentnim magnetima.
Komunikacija se ostvaruje komunikacijskim protokolom Profinet.
4.1 Uspostava komunikacije
Kako bi bilo moguće ostvariti komunikaciju računala i upravljačke jedinice
potrebno je ispravno podesiti postavke mrežne kartice.
Potrebno je kliknuti na Start ⟶ Upravljačka ploča ⟶ Mreža i internet ⟶
Centar za mreže i zajedničko korištenje ⟶ Promjena postavki prilagodnika. Odabrati
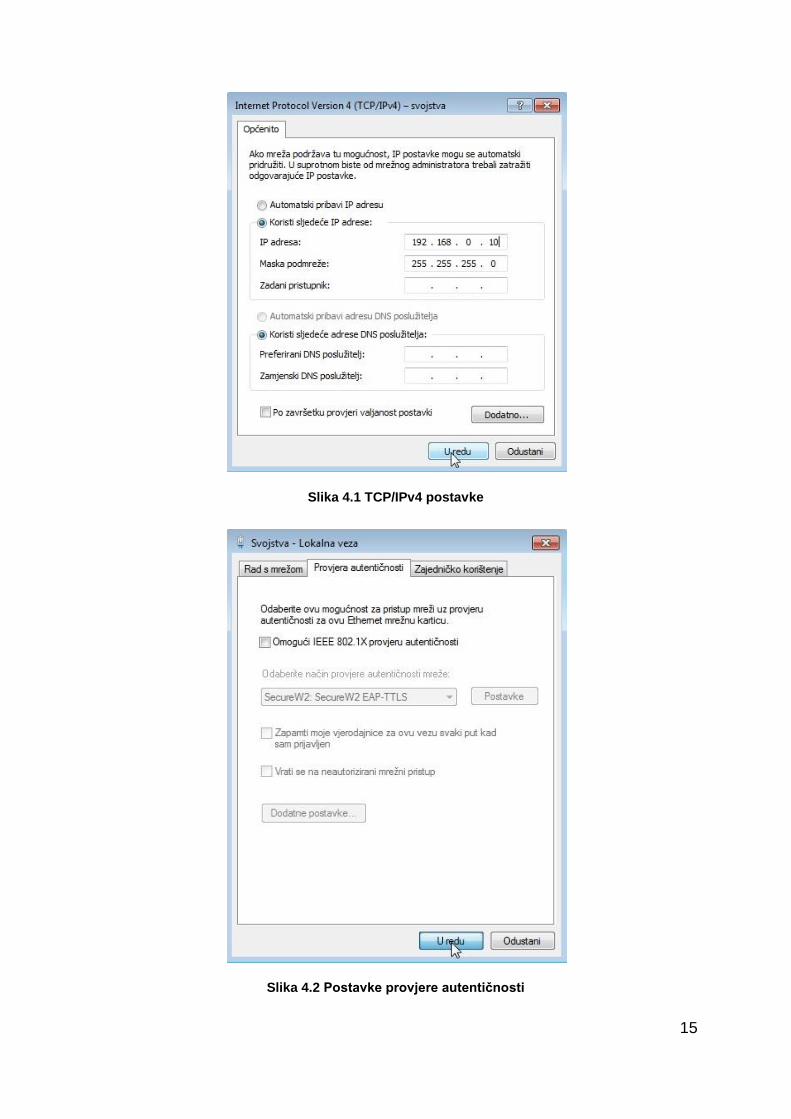
svojstva Lokalne veze (desni klik miša na Lokalna veza) te podesiti TCP/IPv4
postavke kao što je prikazano na slici 4.1.
Potrebno je i onemogućiti IEEE 802.1X provjeru autentičnosti u postavkama
Provjere autentičnosti kao što prikazuje slika 4.2.
Nakon potvrde postavki status Lokalne veze treba biti Omogućeno. Ukoliko to
nije slučaj potrebno je provjeriti da li je mrežni kabl ispravno spojen.
15
Slika 4.1 TCP/IPv4 postavke
Slika 4.2 Postavke provjere autentičnosti

16
4.2 Sadržaj korisničkog sučelja
Sadržaj korisničkog sučelja programskog paketa Starter prikazan je slikom
4.3, a sadrži:
projektni navigator (eng. Project navigator) - prikazuje elemente i
objekte koji se mogu dodati postojećem projektu
radnu površinu (eng. Working navigator) - dio namijenjen za stvaranje
projekta
programska okruženja koja pomažu u konfiguriranju objekata pogona
ekspertnu listu
informacije o pogreškama i alarmima...
Slika 4.3 Korisničko sučelje
4.3 Stvaranje projekta
Za stvaranje projekta potrebno je odabrati Project ⟶ New with wizard... te
Find drive units online... nakon čega se otvara prozor kao na slici 4.4. Potrebno je
unijeti naziv projekta, odabrati mjesto spremanja te opcionalno unijeti autora i
komentar.

17
Slika 4.4 Stvaranje novog projekta
U sljedećem koraku potrebno je Access point... te PG/PC... postavke podesiti
kao na slici 4.5, te odabrati Next za sljedeći korak.
Slika 4.5 Postavke komunikacijskog sučelja
Nakon što je računalo prepoznalo sustav (slika 4.6) potrebno je kliknuti Next te
završiti stvaranje projekta (Complete).

18
Slika 4.6 Uspostava komunikacije između računala i upravljačke jedinice
4.4 Parametriranje pretvarača za rad sa sinkronim strojem
Nakon definiranja projekta i podešavanja komunikacijskog protokola, potrebno
je podesiti parametre koji se odnose na pretvarač, metodu upravljanja, pogon, mjerne
članove, itd.
U projektnom navigatoru potrebno je odabrati Configure drive unit (slika 4.7).
Ovim odabirom pokreće se parametriranje komponenata sustava. Potrebno je dobro
poznavati specifikacije komponenti sustava te ih pažljivo i točno unijeti kako bi
kasnije sve ispravno funkcioniralo.
Slika 4.7 Konfiguriranje upravljačke jedinice

19
Na slikama 4.8 do 4.19 prikazana je parametrizacija elektromotornog pogona
zasnovanog na Sinamics S120 sustavu.
Slika 4.8 Definiranje opcijskog modula
Slika 4.9 Definiranje povezanosti

20
Slika 4.10 Odabir definiranja pretvarača, motora i enkodera
Slika 4.11 Odabir vrste pogona

21
Slika 4.12 Odabir mjernog člana brzine vrtnje
Slika 4.13 Definiranje pretvarača

22
Slika 4.14 Dodatno definiranje pretvarača
Slika 4.15 Unos naziva motora i definiranje sučelja

23
Slika 4.16 Odabir kočnice motora
Slika 4.17 Svojstva enkodera

24
Slika 4.18 Definiranje načina razmjene podataka
Nakon što su svi parametri definirani moguće ih je spremiti u tekstualnom
obliku odabirom Copy text to clipboard, kao što je prikazano na slici 4.19.
Slika 4.19 Prikaz parametara

25
4.5 Puštanje sustava u rad
Za puštanje sustava u rad potrebno je otići u Online način rada. Za
prebacivanje u Online način rada odabrati žutu ikonu u alatnoj traci: Connect to
selected target devices (slika 4.20)
Slika 4.20 Online način rada
U nadolazećem prozoru potrebno je odabrati uređaj na koji se računalo spaja
te pristupnu točku kao što je prikazano slikom 4.21.
Slika 4.21 Odabir pogona za Online rad

26
Nakon što je uspostavljena Online veza vrši se Online/Offline usporedba.
Način rada Online odnosi se na set parametara koji se nalazi u upravljačkoj jedinici
pretvarača, a Offline način na projekt u Starteru. Ako su detektirane razlike, tada su
one i prikazane (slika 4.22).
Slika 4.22 Online/Offline usporedba
Ukoliko se želi trenutni projekt u Starteru učitati u upravljačku jedinicu
potrebno je odabrati <== Download. Ako se želi projekt spremljen u upravljačkoj
jedinici, učitati u Starter, potrebno je odabrati Load to PG ==>.
Da bi puštanje elektromotornog pogona u rad bilo moguće, u ovom slučaju,
potrebno je ručno aktivirati dva sklopnika spojena na digitalni ulaz/izlaz X132 i
kontakte DI/DO12 te DI/DO13. Upravljanje digitalnim ulazima i izlazima moguće je
odabirom Control_Unit ⟶ Input/outputs te u prozoru Bidirectional digital
inputs/outputs postaviti stanje DO12 i DO13 u 1 (slika 4.23). Upravljanje digitalnim
ulazima i izlazima moguće je i korištenjem ekspertne liste (Control Unit ⟶ Expert list)
gdje je parametre p742 i p743 potrebno postaviti u stanje 1 (slika 4.24).

27
Slika 4.23 Uključivanje sklopnika
Slika 4.24 Uključivanje sklopnika korištenjem Ekspertne liste
Prije pokretanja pogona potrebno je u Online režimu rada napraviti dodatna
podešenja parametara. U projektnom navigatoru potrebno je odabrati Drives ⟶
Drive_1⟶ Expert list (slika 4.25).
Slika 4.25 Ekspertna lista

28
Nakon prikaza ekspertne liste, potrebno je aktivirati rutinu za identifikaciju
parametara motora. Parametar p1982[0] potrebno je postaviti u [0] Pole position
identification off (slika 4.26).
Slika 4.26 Deaktivacija identifikacije pozicije polova
Parametar p1980 potrebno je postaviti u [99] No technique selected, a
parametar p1910 u [1] Start motor data with acceptance (slike 4.27 i 4.28).
Slika 4.27 Deaktivacija identifikacije pozicije polova
Slika 4.28 Aktivacija identifikacijske rutine parametrom p1910
Nakon aktivacije identifikacijske rutine istu je potrebno i pokrenuti korištenjem
upravljačkog panela, slika 4.29. Odabirom Drives ⟶ Drive_1 ⟶ Commissioning ⟶
Control panel otvara se upravljački panel kao na slici 4.30.

29
Slika 4.29 Aktivacija upravljačkog panela
Slika 4.30 Upravljački panel
Za korištenje upravljačkog panela potrebno je preuzeti prioritet upravljanja
odabirom Assume control priority. Pojavljuje se prozor u kojem je moguće unijeti
aplikacijsko nadzorno vrijeme (slika 4.31). Dijaloški okvir za preuzimanje
upravljačkog prioriteta potrebno je potvrditi odabirom Accept. Isto tako, potrebno je
potvrditi () Enables kako bi naredbe za uključivanje i isključivanje pogona bile
dostupne.

30
Slika 4.31 Preuzimanje upravljačkog prioriteta
Odabirom Drive ON (zeleni pravokutnik) u upravljačkom panelu pokreće se
identifikacijska rutina (slika 3.32). Tijekom identifikacije parametara ne smije se ništa
mijenjati. Nakon što identifikacija parametara završi, unosom referentne vrijednosti
brzine vrtnje i odabirom Drive ON motor se pokreće.
Kada se klikne Drive OFF (crveni pravokutnik), motor staje. Također, moguće
je napraviti brzo zaustavljanje pritiskom na tipku razmaka (space) na tipkovnici
računala.
Ukoliko se tijekom pokretanja ili rada pojavi greška, motor će stati, a na ekranu
će se pojaviti upozorenje da je aktivan neki alarm. Lista aktivnih alarma otvara se
klikom na Alarm. Ukoliko je neki alarm aktivan, nije moguće pokrenuti motor dok se
taj alarm ne potvrdi (Acknowledgment) i deaktivira.
Slika 4.32 Pokretanje pogona

31
4.6 Snimanje signala
U programskom paketu Starter moguće je obaviti snimanje signala i
spremanje snimljenih vrijednosti u format prikladan za daljnju obradu (.csv ili .xls).
Odabirom Drives ⟶ Drive_1 ⟶ Commissioning ⟶ Trace otvara se prozor u kojem
se podešavaju postavke snimanja (slika 4.33).
U prozoru Trace potrebno je odabrati signal koji će se snimati. Klikom na ikonu
otvara se prozor za odabir signala (slika 4.34). Odabire se željeni signal te
potvrđuje s OK. Da bi odabrani signal bio aktivan potrebno je u stupcu Active
postaviti .
4.33 Prozor Trace

32
4.34 Odabir signala za snimanje
Prije početka snimanja potrebno je dodatno podesiti parametre snimanja. Za
snimanje signala brzine vrtnje za ubrzanje motora od 0 do nazivne vrijednosti
potrebno je odabrati Recording ⟶ Meas. value ⟶ Isochronous recording - time-
limited trace. Vrijednost Duration podesiti na , a Trigger postaviti tako da
snimanje započne prije nego signal brzine vrtnje dosegne vrijednost u
uzlaznoj putanji (slika 4.23).
Kada su postavke snimanja podešene, snimanje je potrebno i pokrenuti
odabirom Trace start (slika 4.35).
4.35 Pokretanje snimanja
Nakon što je snimanje pokrenuto, a motor korištenjem upravljačkog panela
ubrzan s na 3000
, u prozoru Time diagram prikazan je izmjereni signal (slika
4.36), odnosno signali koji su aktivni u prozoru Trace. Prozor Measurements
omogućava prikaz i spremanje izmjerenih signala. Ukoliko se desnim klikom miša na
Measurement, u prozoru Measurements, odabere opcija Export Measurements,
mjerenje je moguće spremiti u .csv ili .xls formatu.
33
4.36 Prikaz izmjerenog signala
Dodatno je moguće definirati referentni signal brzine vrtnje korištenjem
funkcijskog generatora (Function generator).
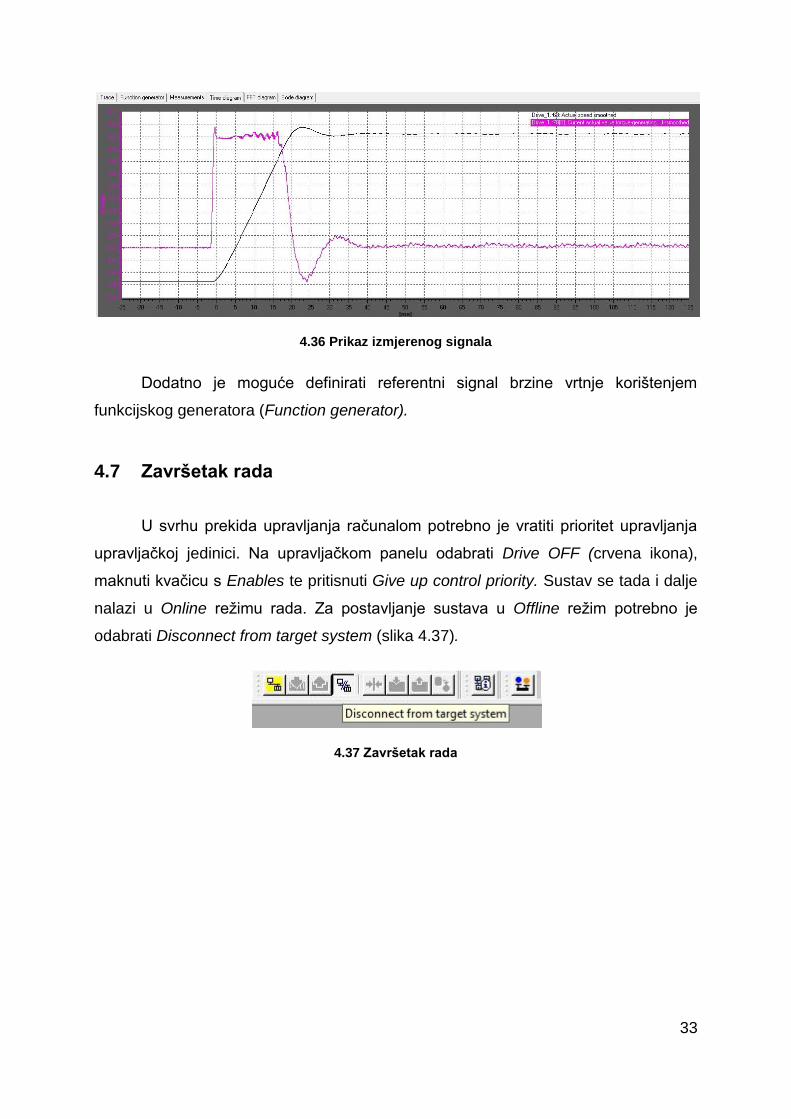
4.7 Završetak rada
U svrhu prekida upravljanja računalom potrebno je vratiti prioritet upravljanja
upravljačkoj jedinici. Na upravljačkom panelu odabrati Drive OFF (crvena ikona),
maknuti kvačicu s Enables te pritisnuti Give up control priority. Sustav se tada i dalje
nalazi u Online režimu rada. Za postavljanje sustava u Offline režim potrebno je
odabrati Disconnect from target system (slika 4.37).
4.37 Završetak rada
34
5 Testiranje i simuliranje elektromotornog pogona
U ovom poglavlju dan je prikaz bitnih parametara pogona te pripadajuća
shema simuliranja. Prikazani su rezultati eksperimentalnog testiranja te simuliranja u
Simulinku.
5.1 Parametri elektromotornog pogona
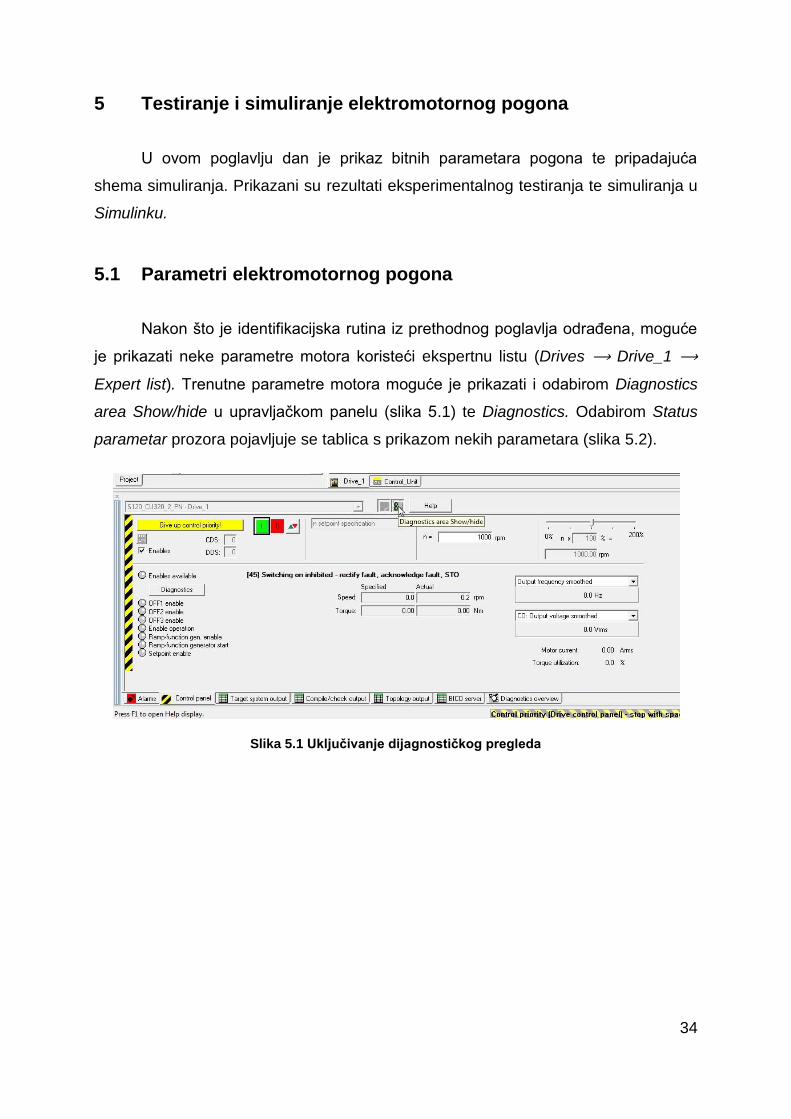
Nakon što je identifikacijska rutina iz prethodnog poglavlja odrađena, moguće
je prikazati neke parametre motora koristeći ekspertnu listu (Drives ⟶ Drive_1 ⟶
Expert list). Trenutne parametre motora moguće je prikazati i odabirom Diagnostics
area Show/hide u upravljačkom panelu (slika 5.1) te Diagnostics. Odabirom Status
parametar prozora pojavljuje se tablica s prikazom nekih parametara (slika 5.2).
Slika 5.1 Uključivanje dijagnostičkog pregleda

35
Slika 5.2 Trenutni parametri
Na temelju kataloga pogona i parametara prikazanih u Starteru dana je tablica
5.1 s prikazom značajnijih parametara pogona.
Tablica 5.1 Parametri pogona temeljeni na kataloškim podacima i parametrima dobivenim u Starteru
Parametar Iznos Opis
310 nazivna snaga motora
3000 nazivni broj okretaja
1 nazivni moment motora
1,6 nazivna struja motora
3 broj pari polova motora
6,5 * 10-5 moment inercije motora
85 korisnost motora
5,53135 otpor namota motora

36
0,135 otpor pretvarača
19,56624 induktivitet motora u KS-u
16,89075 induktivitet motora u KS-u
16 frekvencija sklapanja (podesiva na niže do preporučenih 4
)
0 referentni napon u KS-u
145 referentni napon u KS-u
135 nazivna protuelektromotorna sila
153 nazivni napon
0,67
koeficijent za računanje momenta
2000
prirodna frekvencija PT2 setpoint filtra
0,7 koeficijent prigušenja PT2 setpoint filtra
40,64 koeficijent pojačanja regulatora struje
2 vremenska konstanta regulatora struje
0,017 koeficijent pojačanja regulatora brzine vrtnje
13,55 vremenska konstanta regulatora brzine vrtnje
Tablicom 5.2 dani su parametri elektromotornog pogona temeljeni na
proračunu i procijeni.

37
Tablica 5.2 Parametri pogona temeljeni na procijeni i proračunu
Parametar Iznos Opis
1,45 * 10-4 moment inercije motora i remenice
0,0815 moment Coulombovog trenja
6,484*10-5
koeficijent viskoznog trenja
0,1765 koeficijent pojačanja armature
0,003 vremenska konstanta armature
3,08 koeficijent pojačanja pretvarača
31,25 vremenska konstanta pretvarača
1 koeficijent pojačanja strujnog senzora
46,576 vremenska konstanta strujnog senzora
1 koeficijent pojačanja mjernog člana brzine vrtnje
1 vremenska konstanta mjernog člana brzine vrtnje
0,4297
koeficijent za računanje protuelektromotorne sile
Ukupni moment inercije dobiva se pribrajanjem momenta inercije remenice
momentu inercije motora. Moment inercije remenice procijenjen je s obzirom na
dimenzije remenice i materijal.
U nastavku je dan proračun momenta Coulombovog trenja i koeficijenta
viskoznog trenja, izveden na način da 80% gubitaka, nastalih zbog trenja i ventilacije,
daje Coulombovo trenje, a preostalih 20% odnosi se na viskozno trenje.

38
Gdje je:
Gdje je:
Koeficijent pojačanja armature proračunat je kao:
dok je vremenska konstanta armature definirana kao:
Parametri pretvarača određeni su prema sljedećim relacijama:
Pri čemu je određen kao ostvareni napon nakon ispravljanja (napon DC linka) i
iznosi 308 V. Referenca pretvarača zadaje se u intervalu od 0 do 100.
Parametri strujnog senzora, kao i mjernog člana brzine vrtnje temelje se na
procijeni i pripadajućim približnim relacijama:

39
Iznos nazivne protuelektromotorne sile iznosi 135 V. Temeljem ovog
parametra moguće je proračunati koeficijent za računanje inducirane
protuelektromotorne sile
Gdje je:
Parametri dani u tablici 5.1 i 5.2 potrebni su za simuliranje elektromotornog
pogona u Matlab-Simulinku te radu na optimizaciji sustava, što je obrađeno u
narednim poglavljima ovog rada.
5.2 Rezultati testiranja i simuliranja
Shema elektromotornog pogona potrebna za simuliranje u Simulinku
prikazana je na slici 5.3.
Slika 5.3 Shema elektromotornog pogona

40
PI regulatori brzine vrtnje i struje s „anti-windup“ algoritmom izvedeni su kao
što je prikazano na slici 5.4. Za definiranje regulatora potrebno je unijeti koeficijent
pojačanja te pripadajuću integralnu vremensku konstantu. Isto tako, ovom izvedbom
moguće je odrediti granice izlaznih vrijednosti regulatora, kao i vrijeme diskretizacije
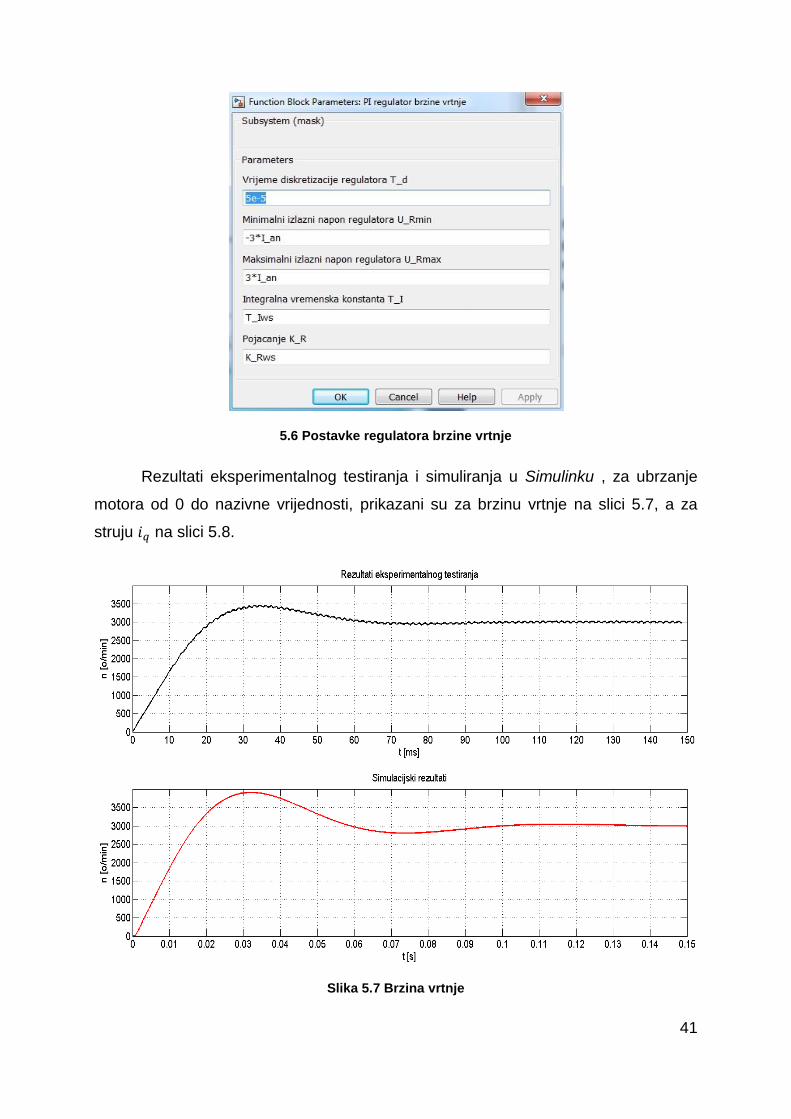
regulatora. Regulator struje postavljen je kao na slici 5.5, a regulator brzine vrtnje
prema slici 5.6.
5.4 Izvedba PI regulatora
5.5 Postavke regulatora struje
41
5.6 Postavke regulatora brzine vrtnje
Rezultati eksperimentalnog testiranja i simuliranja u Simulinku , za ubrzanje
motora od 0 do nazivne vrijednosti, prikazani su za brzinu vrtnje na slici 5.7, a za
struju na slici 5.8.
Slika 5.7 Brzina vrtnje
42
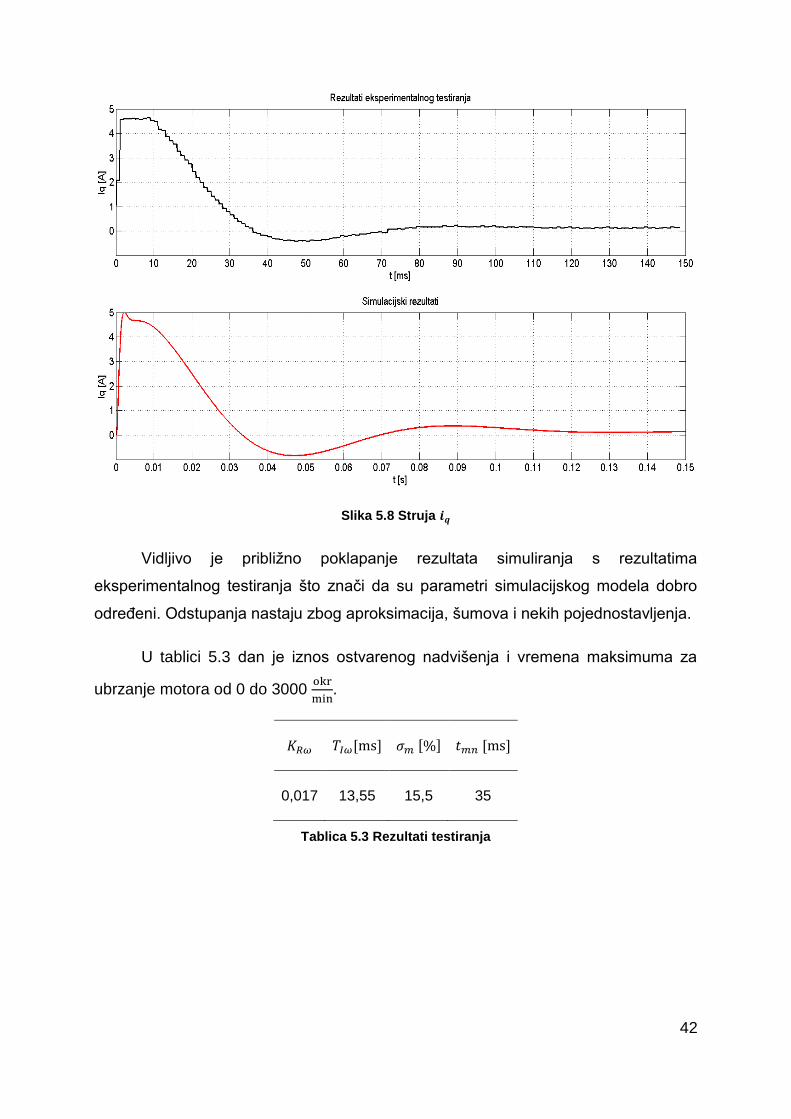
Slika 5.8 Struja
Vidljivo je približno poklapanje rezultata simuliranja s rezultatima
eksperimentalnog testiranja što znači da su parametri simulacijskog modela dobro
određeni. Odstupanja nastaju zbog aproksimacija, šumova i nekih pojednostavljenja.
U tablici 5.3 dan je iznos ostvarenog nadvišenja i vremena maksimuma za
ubrzanje motora od 0 do 3000
.
0,017 13,55 15,5 35
Tablica 5.3 Rezultati testiranja
43
6 Optimizacija elektromotornog pogona
Osnovni segment optimizacije ovog pogona vidljiv je u isključivanju PT2
setpoint filtra s prirodnom frekvencijom 2000
i koeficijentom prigušenja 0,7 koji
dodatno usporava odziv sustava, uvođenju prefiltra brzine vrtnje, te podešavanju
iznosa vremenske konstante povratne veze brzine vrtnje. Setpoint filtar q-
komponente struje se u praksi postavlja zbog smanjenja udara momenta motora pri
promjeni referentne brzine ili momenta tereta, što se može postići i na druge načine
(rampa u grani referentne vrijednosti brzine, filtar q-komponente struje). Za ispitivanje
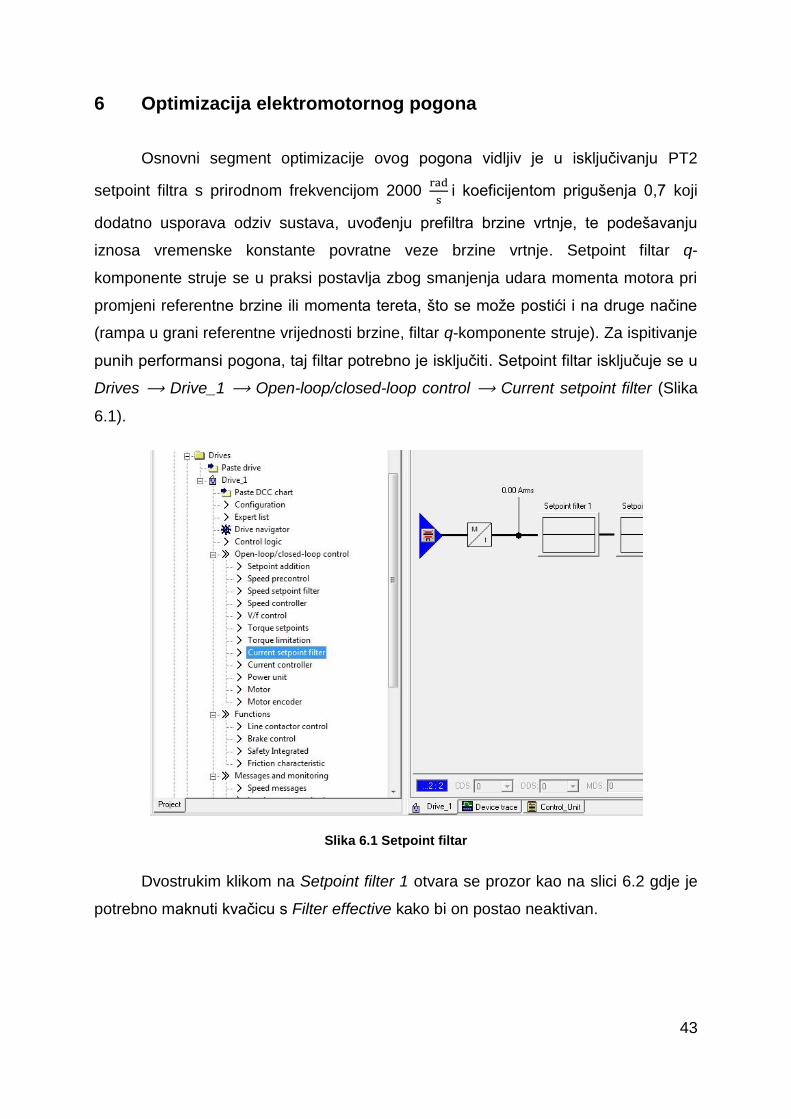
punih performansi pogona, taj filtar potrebno je isključiti. Setpoint filtar isključuje se u
Drives ⟶ Drive_1 ⟶ Open-loop/closed-loop control ⟶ Current setpoint filter (Slika
6.1).
Slika 6.1 Setpoint filtar
Dvostrukim klikom na Setpoint filter 1 otvara se prozor kao na slici 6.2 gdje je
potrebno maknuti kvačicu s Filter effective kako bi on postao neaktivan.

44
Slika 6.2 Deaktivacija setpoint filtra
S obzirom na ovu promjenu potrebno je proračunati nove parametre
regulatora struje (momenta) i brzine vrtnje što je obrađeno u nastavku ovog rada.
6.1 Projektiranje regulatora struje
U ovom poglavlju opisano je projektiranje regulatora struje (momenta)
korištenjem Bodeovog prikaza frekvencijskih karakteristika i tehničkog optimuma [1].
Slika 6.3 Blokovska shema SMPM-a s PI regulatorom struje
Prijenosna funkcija otvorenog sustava s regulatorom ima oblik:

45
(6-1)
Gdje je:
(6-2)
(6-3)
(6-4)
U slučaju kompenzacije najveće vremenske konstante , odnosno
tehničkog optimuma (TO), prijenosna funkcija otvorenog sustava s regulatorom
poprima oblik:
(6-5)
Frekvencijski dijagrami prijenosne funkcije prikazani su slikom 6.4.
Slika 6.4 Amplitudno-frekvencijska i fazno-frekvencijska karakteristika otvorenog sustava s regulatorom

46
S obzirom da se radi o procesu trećeg reda a željeno nadvišenje je 10%,
potrebno fazno osiguranje iznos:
(6-6)
Na temelju fazno-frekvencijske karakteristike i izračunatog faznog osiguranja
određuje se frekvencija presjeka:
(6-7)
Gdje je:
(6-8)
(6-9)
S poznatom frekvencijom presjeka crta se amplitudno-frekvencijska
karakteristika te se određuje koeficijent pojačanja otvorenog sustava s regulatorom
u području niskih frekvencija s nagibom karakteristike od -1 (-20
dB/dek) iz kojeg se određuje koeficijent pojačanja regulatora.
(6-10)
(6-11)
(6-12)
Konačni parametri PI regulatora struje (momenta) su:
(6-13)
(6-14)
6.2 Projektiranje regulatora brzine vrtnje
U ovom poglavlju opisano je projektiranje regulatora brzine vrtnje korištenjem
Bodeovog prikaza frekvencijskih karakteristika i simetričnog optimuma [1].
47
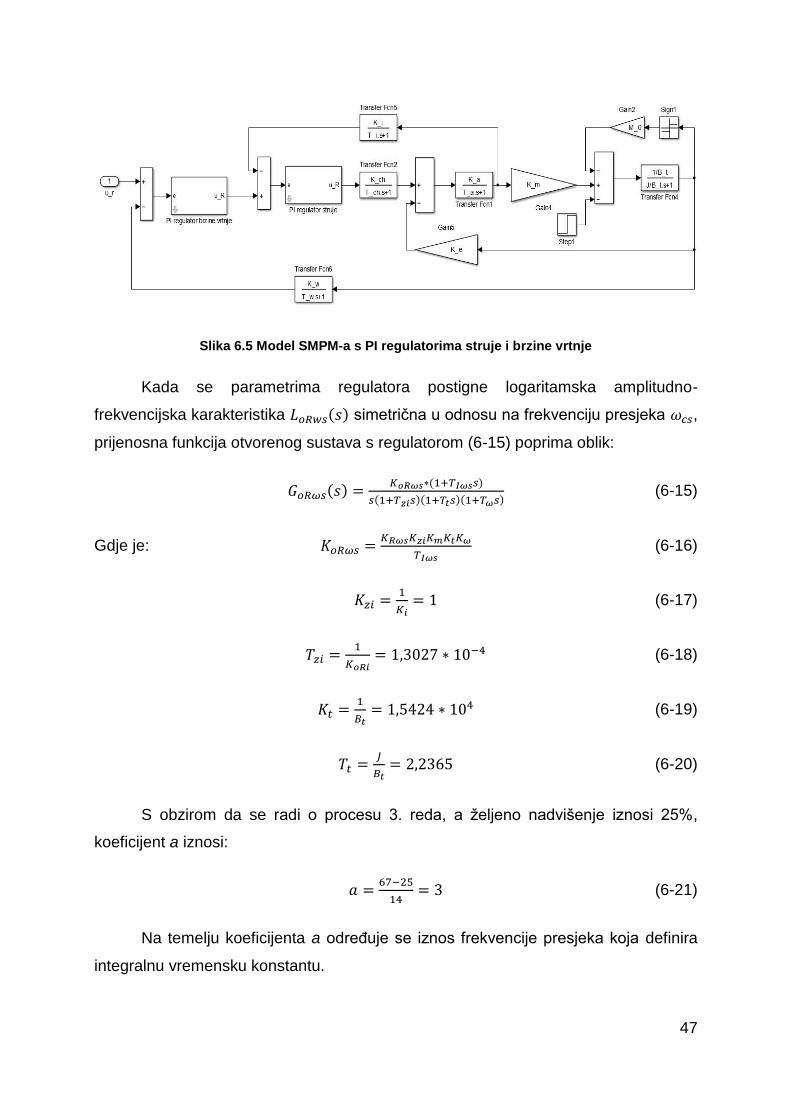
Slika 6.5 Model SMPM-a s PI regulatorima struje i brzine vrtnje
Kada se parametrima regulatora postigne logaritamska amplitudno-
frekvencijska karakteristika simetrična u odnosu na frekvenciju presjeka ,
prijenosna funkcija otvorenog sustava s regulatorom (6-15) poprima oblik:
(6-15)
Gdje je:
(6-16)
(6-17)
(6-18)
(6-19)
(6-20)
S obzirom da se radi o procesu 3. reda, a željeno nadvišenje iznosi 25%,
koeficijent a iznosi:
(6-21)
Na temelju koeficijenta a određuje se iznos frekvencije presjeka koja definira
integralnu vremensku konstantu.

48
(6-22)
Gdje je:
(6-23)
Integralna vremenska konstanta iznosi:
(6-24)
(6-25)
Crta se Bodeov prikaz (aproksimacija pravcima) amplitudno-frekvencijske
karakteristike otvorenog sustava s regulatorom (slika 6.6) tako da prolazi
kroz frekvenciju presjeka
Slika 6.6 Amplitudno-frekvencijska i fazno-frekvencijska karakteristika otvorenog sustava s regulatorom
Određuje se koeficijent pojačanja otvorenog sustava s regulatorom u
području niskih frekvencija s nagibom karakteristike od -1 (-20 dB/dek).

49
(6-26)
Gdje je:
(6-27)
Koeficijent pojačanja otvorenog sustava s regulatorom u području niskih
frekvencija s nagibom karakteristike od -1 (-20 dB/dek) iznosi:
(6-28)
Koeficijent pojačanja PI regulatora brzine vrtnje:
(6-29)
6.3 Rezultati testiranja
Dobivene parametre regulatora potrebno je unijeti u programski paket Starter i
primijeniti na upravljačku jedinicu.
Parametre regulatora struje moguće je promijeniti u Drives ⟶ Drive_1 ⟶
Open-loop/closed-loop control ⟶ Current controller. Potrebno je unijeti koeficijent
pojačanja te iznos integralne vremenske konstante u .
U Drives ⟶ Drive_1 ⟶ Open-loop/closed-loop control ⟶ Speed controller
mijenjaju se parametri regulatora brzine vrtnje. Unosi se koeficijent pojačanja i iznos
integralne vremenske konstante u .
Prefiltar brzine vrtnje postavlja se u Drives ⟶ Drive_1 ⟶ Open-loop/closed-
loop control ⟶ Speed setpoint filtar.
Vremensku konstantu povratne veze brzine vrtnje potrebno je podesiti u
Drives ⟶ Drive_1 ⟶ Open-loop/closed-loop control⟶ Motor encoder gdje je
potrebno unijeti iznos u ms.

50
Regulator brzine vrtnje projektiran je tako da nadvišenje odziva bude 25%.
Kako bi kompenzacija poremećaja bila što bolja koeficijent pojačanja regulatora
brzine vrtnje poveća se tako da nadvišenje iznosi 40%, a kasnije se to nadvišenje,
uvođenjem prefiltra brzine vrtnje, smanji na 10%. Korigirani parametri koeficijenta
pojačanja regulatora brzine vrtnje, kao i iznos vremenske konstante prefiltra određuju
se najprije u Matlab-Simulinku, a po potrebi korigiraju tijekom testiranja.
Vremenska konstanta povratne veze brzine vrtnje utječe na parametre
regulatora brzine vrtnje kao i na samo ponašanje elektromotornog pogona, te su
shodno tome proračunati parametri regulatora za različite iznose vremenske
konstante u cilju postizanja što boljeg rada elektromotornog pogona.
Odrađena su testiranja koju uključuju odziv sustava na promjenu reference od
uz proračunate parametre regulatora, odziv uz korigiran koeficijent pojačanja
kojim se ostvaruje nadvišenje od 40% te testiranje uz prefiltar brzine vrtnje kojim se
ostvaruje nadvišenje od 10%. Prikazani su i rezultati testiranja za ubrzanje motora od
0 do nazivne brzine vrtnje.
Parametri regulatora brzine vrtnje za iznos vremenske konstante povratne
veze brzine vrtnje iznose:
Rezultati testiranja za te parametre prikazani su na slici 6.7. Postiže se
nadvišenje od oko 30%. Kako bi nadvišenje iznosilo 40% potrebno je koeficijent
pojačanja regulatora brzine vrtnje korigirati na iznos:
što predstavlja više od trostruko povećanje koeficijenta pojačanja i preveliko
forsiranje sustava, te se korigirani parametar uzima kao dvostruko veći:
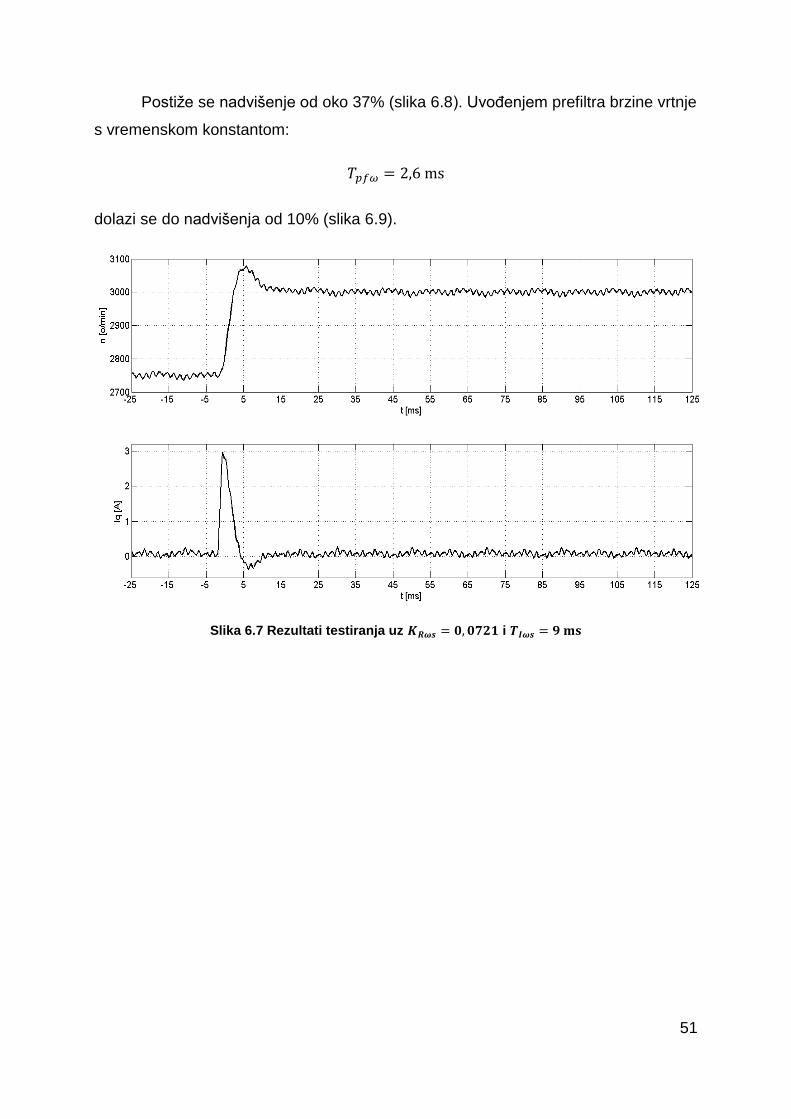
51
Postiže se nadvišenje od oko 37% (slika 6.8). Uvođenjem prefiltra brzine vrtnje
s vremenskom konstantom:
dolazi se do nadvišenja od 10% (slika 6.9).
Slika 6.7 Rezultati testiranja uz i

52
Slika 6.8 Rezultati testiranja uz i
Slika 6.9 Rezultati testiranja uz , i
53
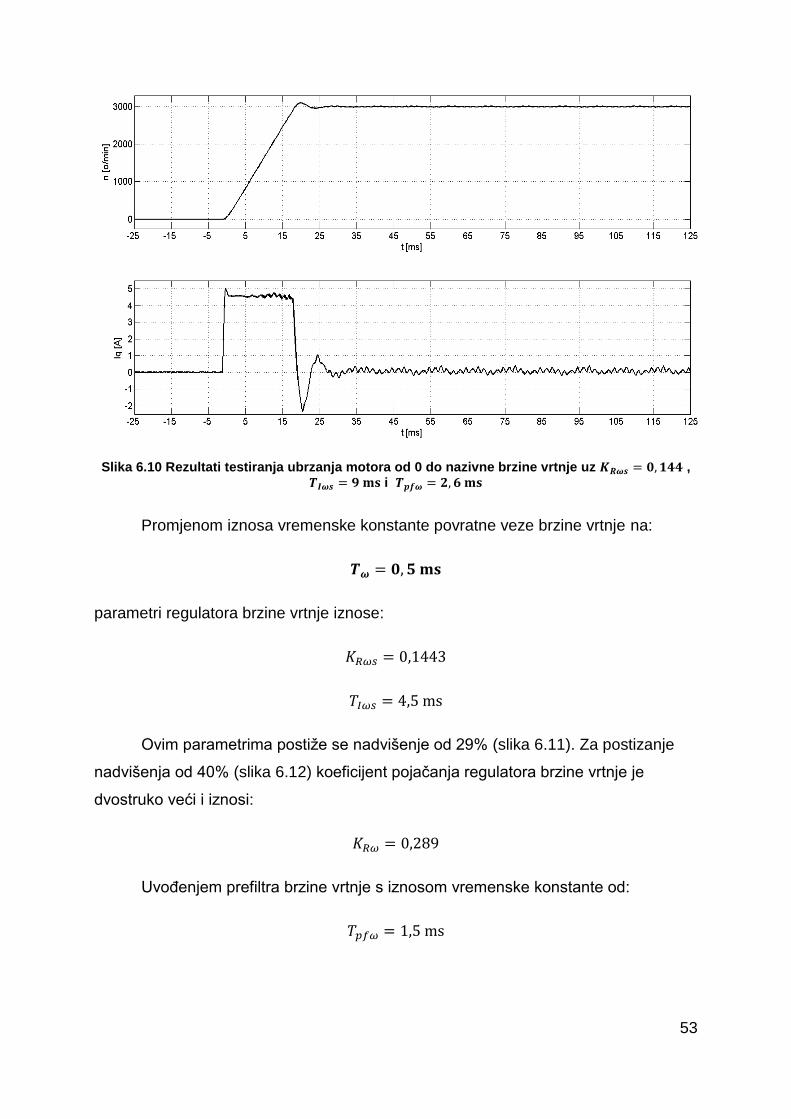
Slika 6.10 Rezultati testiranja ubrzanja motora od 0 do nazivne brzine vrtnje uz , i
Promjenom iznosa vremenske konstante povratne veze brzine vrtnje na:
parametri regulatora brzine vrtnje iznose:
Ovim parametrima postiže se nadvišenje od 29% (slika 6.11). Za postizanje
nadvišenja od 40% (slika 6.12) koeficijent pojačanja regulatora brzine vrtnje je
dvostruko veći i iznosi:
Uvođenjem prefiltra brzine vrtnje s iznosom vremenske konstante od:

54
postiže se nadvišenje od 10% kao što je prikazano na slici 6.13. Slika 6.14 prikazuje
ubrzanje motora od 0 do nazivne brzine vrtnje.
Slika 6.11 Rezultati testiranja uz =0,144 i =4,5 ms
Slika 6.12 Rezultati testiranja uz i

55
Slika 6.13 Rezultati testiranja uz , i
Slika 6.14 Rezultati testiranja ubrzanja motora od 0 do nazivne brzine vrtnje uz ,
i
Ukoliko vremenska konstanta povratne veze brzine vrtnje iznosi:

56
parametri regulatora brzine vrtnje su:
Za postizanje nadvišenja od 40% (slika 6.16) koeficijent pojačanja regulatora
brzine vrtnje potrebno je korigirati na:
Vremenska konstanta prefiltra brzine vrtnje kojom se postiže nadvišenje od
10% (slika 6.17) je:
Slika 6.15 Rezultati testiranja uz i

57
Slika 6.16 Rezultati testiranja uz i
Slika 6.17 Rezultati testiranja uz , i

58
Slika 6.18 Rezultati testiranja ubrzanja motora od 0 do nazivne brzine vrtnje uz ,
i
Tablica 6.1 prikazuje parametre regulatora brzine vrtnje, ostvareno nadvišenje
i vrijeme maksimuma, korigirane parametre regulatora i iznos vremenske konstante
prefiltra brzine vrtnje za različite iznose vremenske konstante povratne veze i
promjenu reference od
. Dano je i ostvareno vrijeme maksimuma za ubrzanje
motora od 0 do nazivne brzine vrtnje .
Tablica 6.1 Usporedba rezultata
0,072 9 32 5,75 0,15 10 4,25 19,9 2,6
0,144 4,5 28 2,8 0,28 10 2,6 19,5 1,5
0,036 18 26 11,5 0,072 10 9,8 23,3 4
Usporedbom rezultata iz tablice 5.2 i tablice 6.1 dolazi se do zaključka da
sustav uz nove parametre regulatora, isključen PT2 setpoint filtar i postavljen prefiltar
brzine vrtnje ima manje ostvareno nadvišenje uz brži odziv.

59
Usporedbom rezultata testiranja prikazanih na slikama 6.6 do 6.17 vidljiv je
utjecaj iznosa vremenske konstante povratne veze. Uz veću vremensku konstantu
povratne veze postiže se glatkiji odziv, no kompenzacija poremećaja bi u tom slučaju
trebala biti sporija nego s manjom vremenskom konstantom. S manjom vremenskom
konstantom povratne veze postiže se preveliko forsiranje, te je prisutna veća količina
oscilacija. Najbolje ponašanje elektromotornog pogona postiže se uz
Na slici 6.19 i 6.20 prikazani su rezultati testiranja uz početne parametre
sustava, te rezultati uz proračunate parametre regulatora, uklonjen PT2 setpoint filta i
postavljen prefiltar brzine vrtnje. Vidljivo je poboljšanje rada elektromotornog pogona
u pogledu manjeg nadvišenja uz ostvaren brži odziv. Isto tako, kompenzacija
poremećaja bi trebala biti bolja po iznosu i vremenski brža.
Slika 6.19 Usporedba rezultata testiranja brzine vrtnje

60
6.20 Usporedba rezultata testiranja struje iq

61
7 Zaključak
Sinkroni motori s permanentnim magnetima jedni su od najboljih motora zbog
svojih malih dimenzija, visoke korisnosti, velikog faktora snage i velike gustoće snage
po jedinici volumena. Korištenjem napredne matematičke analize u radu strojeva
moguće je prikazati model SMPM-a u rotirajućem koordinatnom sustavu u kojem su
sve fizikalne varijable neovisne o položaju rotora. Model SMPM-a u takvom, dq
sustavu, ekvivalentan je modelu istosmjernog motora s nezavisnom i konstantnom
uzbudom.
Softverski paket primjeren za Sinamics S120 elektromotorni pogon je Starter
V4.3 te su u ovom radu dane upute za puštanje u rad elektromotornog pogona. Uz
puštanje pogona u rad softverski paket omogućava parametriranje, testiranje,
optimizaciju i dijagnostiku.
Kako bi ponašanje elektromotornog pogona bilo moguće prikazati i provjeriti
simulacijom na računalu, korištenjem softverskog paketa Matlab-Simulink, potrebno
je odrediti parametre modela od kojih su neki dostupni putem kataloga i
dijagnostičkih rezultata dok je neke potrebno proračunati.
Analizom rezultata testiranja elektromotornog pogona uočeno je da se
ponašanje elektromotornog pogona može poboljšati. U početnom modelu pogona
koristi se PT2 setpoint filtar koji dodatno usporava odziv, a njegovim uklanjanjem ne
gubi se ništa što je regulacijski važno. Shodno isključivanju filtra potrebno je
proračunati nove parametre regulatora struje (momenta) i brzine vrtnje. Podešena je i
vremenska konstanta povratne veze brzine vrtnje, te je postavljen prefiltar.
Primjenom rezultata optimizacije na pogon postiže se brži odziv brzine vrtnje uz
manje nadvišenje, dok je struja i dalje u granicama dozvoljenih vrijednosti, a
kompenzacija poremećaja bi trebala biti bolja.
U daljnjem radu potrebno je testirati elektromotorni pogon na poremećaj, te
automatizirati pokretanje i rad kako bi bio spreman za korištenje u nekom postrojenju.

62
8 Literatura
[1] Crnošija, P. i Bjažić, T., Osnove automatike (1. dio: Analiza i sinteza
kontinuiranih sustava - teorija i primjena), Zagreb, Element, 2011.
[2] Dragojević M., Izvedba algoritma upravljanja i regenerativnog kočenja
sinkronog motora s permanentnim magnetima, Fakultet elektrotehnike i
računarstva, 2012.
[3] Pravica, L., Strukture upravljanja sinkronim motorom s permanentnim
magnetima, Fakultet elektrotehnike i računarstva, 2012.
[4] Siemens, 1/2011. , Sinamics S120/S150,
http://www.automation.siemens.com/doconweb/pdf/SINUMERIK_SINAMIC
S_02_2012_E/LH1.pdf?p=1, 08.03.2014.
[5] Siemens, 9/2011., Connection of the SINAMICS S120 to the Technology
CPU,
http://cache.automation.siemens.com/dnl/jM/jM0ODUwNQAA_30119684_H
B/pi_s120_en-US_en-US.pdf, 08.03.2014.
[6] Kolonić, F., Sumina, D., Kutija, M., Upute za rad s frekvencijskim
pretvaračem Sinamics S120, Fakultet elektrotehnike i računalstva,
2011/2012
[7] Siemens, 11/2009., Sinamics S120,
http://www.industry.usa.siemens.com/datapool/us/dt/drives/docs/drv-
sinamics_s120-cu_comp_manual.pdfsinamics_s120-cu_comp_manual.pdf,
15.04.2014.
[8] Siemens,
https://mall.industry.siemens.com/mall/en/WW/Catalog/Product/6SL3040-
1MA01-0AA0, 15.04.2014.

63
[9] Siemens,
https://mall.industry.siemens.com/mall/en/WW/Catalog/Product/6SL3210-
1SB12-3AA0, 16.04.2014.
[10] Siemens,
https://eb.automation.siemens.com/mall/en/WW/Catalog/Product/?mlfb=1F
K7032-2AF2, 16.04.2014
.

64
9 Sažetak
U radu je dan matematički model sinkronog motora s permanentnim
magnetima, koji je ekvivalentan modelu klasičnog istosmjernog motora s nezavisnom
i konstantnom uzbudom. Opisan je elektromotorni pogon kao i njegovo
parametriranje, puštanje u rad i optimizacija. Softverski paket primjeren za Sinamics
S120 elektromotorni pogon je Starter V4.3 te su u ovom radu dane upute za puštanje
u rad elektromotornog pogona. U pogledu optimizacije isključen je PT2 setpoint filtar
struje, koji se pojavljuje u početnom modelu, te su shodno tome proračunati novi
parametri regulatora struje (momenta) i brzine vrtnje. Postavljen je prefiltar brzine
vrtnje te je podešen iznos vremenske konstante povratne veze brzine vrtnje.
Primjenom optimiranih parametara postiže se brži odziv brzine vrtnje uz manje
nadvišenje, dok je struja i dalje u granicama dozvoljenih vrijednosti. Isto tako,
kompenzacija poremećaja (momenta tereta) bi trebala biti bolja po iznosu i vremenski
brža.
Ključne riječi: sinkroni motor s permanentnim magnetima, SMPM, vektorsko
upravljanje, širinsko-impulsna modulacija, Starter, Sinamics S120, regulator struje,
regulator brzine vrtnje

65
10 Abstract
A mathematical model of permanent magnet synchronous motor is described
in this thesis. The described model is equivalent to a model of classical separately
excited DC motor with constant exication. An electric drive is described together with
his parametrization, start up and optimization. Software package suitable for
Sinamics electric motor is Starter V4.3 and in this thesis further instructions for its
usage are given. Regarding optimization PT2 setpoint filter is disabled, which
appears in starting model, and according to that new parameters were calculated for
current (torque) and rotational speed controllers. A setpoint filter of rotational speed
was set and time constant of rotational speed feedback was adjusted. With usage of
optimized parameters a quicker response of rotational speed with smaller overshoot
is achieved, while current is still within allowed limits and compensation of
disturbances is better.
Keywords: permanent magnet synchronous motor, PMSM, vector control, pulse with
modulation, Starter, Sinamics S120, current controller, speed controller

66
11 Životopis
Marko Boršić rođen je 6. veljače 1992. u Zagrebu. Osnovnu školu završio je u
Desiniću. Srednju školu usmjerenja tehničar za mehatroniku završio je u Krapini
2011. Sudjelovao je na natjecanjima iz informatike i matematike tijekom osnovne i
srednje škole, a 2011. osvojio je drugo mjesto na Državnom natjecanju učenika u
disciplini dizajniranja računalom - CATIA. 2011. upisuje preddiplomski stručni studij
mehatronike na Tehničkom veleučilištu u Zagrebu. Tijekom studija prima dvije
Pohvale za istaknut uspjeh u studiju.





























