Embed Size (px)
Citation preview
1
Technique opératoire instrumentation naviguée
Prothèse totale de genou
SCORE® de Révision
TO.G.FR.007/1.0

2
Description de la station
Tête optique
Pointeur laser
Boutons de commande du pointeur laser
Écran tactile Connexion pour clés USB
Microphone
Haut-parleur bilatéral
Poignée d’orientation de la tête optique
Poignée de préhension de la station
Lumière d’indication de fonctionnement de la tête optique
Face Avant

3
Description de la station
Système de verrouillage de la colonne
Grille de ventilation
Connections
Bouton marche/arrêt
Cordon d’alimentation
Support de cordon d’alimentation
Bouton pour déconnection de la tête optique
Face Arrière

4
Phase de préparation
Point de verrouillage Face avant
Face arrière Rangement de la pédale et de la housse de protection de la station
Pédale

5
Phase de préparation
• Déverrouiller les 4 points de fermeture de la valise de transport
• Ouvrir la face avant et extraire la station avec la pédale et un sachet housse de pédale.
• Installer la station de façon stable sur une table ou un chariot du bloc opératoire.
• Procéder au nettoyage de la station (voir manuel d’utilisation situé dans la valise de transport).
• Brancher la pédale à l’arrière de la station (se référer à l’iconographie des connections).
• Brancher le fil d’alimentation.

6
Phase de préparation
Position déverrouillée
Position verrouillée
Poignée de verrouillage

7
Phase de préparation
• Positionner la station par rapport au patient (Rappel: distance mini. de 1,5 m).
• Régler la tête optique en position neutre (levée au maximum et sans rotation).
• Déverrouiller la colonne mobile: lever la poignée de verrouillage et laisser la colonne monter librement jusqu’à sa position haute.
• Appuyer sur le bouton marche/arrêt vert, situé à l’arrière de la station. Bouton en position « I »

8
Définition de l’écran
Visibilité et positionnement des Corps rigides F: Fémur T :Tibia P: Palpeur G: Guide
Zone de navigation dynamique
Boutons permanents

9
Définition des boutons permanents
Retour à l’étape précédente
Temps de l’intervention
Validation et passage à l’étape suivante
Photographie de
l’écran actif
Calibration du palpeur/pointeur par rapport à l’écran
Quitter
l’application
Apparaît lorsque le palpeur/pointeur est inutilisable pour des sélections à l’écran

10

11
Phase de préparation
• Sélectionner à l’aide de l’écran tactile, la langue souhaitée.
• Sélectionner de la même façon l’image de la PTG SCORE® de révision entourée en bleu.
• Vous accédez à une page d’accueil.
• Pour accéder au 1er écran, appuyer sur la flèche bleue.
• Page Information: étape informations patient.
• Saisir les renseignements à l’aide du clavier sur l’écran tactile:
• Nom du chirurgien
• Nom du patient
• Date de naissance du patient (facultatif)
• Côté opéré (appuyer sur le bouton correspondant au côté opéré)
• Pour passer à l’étape suivante valider à l’aide de la pédale bleue ou à l’écran en appuyant sur la flèche bleue.
• Pour revenir à l’étape précédente, valider à l’aide de la pédale jaune ou à l’écran en appuyant sur la flèche jaune.

12
Broches de fixation
Corps rigide Fémur
Corps rigide Tibia Marqueurs
Bouton de clipsage
Corps rigide
Broches de fixation
Fémur Support de fixation
Rotule
Limite entre Corps rigide et support.
Marqueur sphérique

13
Mise en place des corps rigides
• Clipser les marqueurs sphériques sur les corps rigides: • 3 pour le T (tibia) • 3 pour le F (fémur) • 4 pour le P (palpeur/pointeur) • 3 pour le G (guide)
• Les broches de fixation doivent être placées en antéro interne sur le fémur et le tibia et ne doivent pas gêner la mise en place des tarauds. Leur mise en place peut être faite soit dans la voie d’abord, soit en percutanée.
• Mettre la 1ère broche en place (traverser la 1ère corticale et se fixer dans la 2ème corticale sans la traverser).
• Placer le système de fixation des corps rigides sur cette broche, afin d’obtenir le bon écartement pour fixer la seconde broche.
• Clipser le corps rigide fémur (attention respecter le sens flèche/flèche) sur la partie mobile du système de fixation. S’il est nécessaire pendant l’intervention de retirer le corps rigide, celui-ci sera toujours positionné de la même façon.
• Orienter le corps rigide vers la tête optique et verrouiller le système de fixation.
• Orienter et fixer le corps rigide de façon à ce que jambe fléchie ou non, les corps rigides soient toujours visibles par la tête optique.
• Après abord de l’articulation et exposition du genou à l’aide des écarteurs fournis, il est important de faire l’exérèse des ostéophytes pour retrouver les bonnes surfaces articulaires à palper pour la numérisation des surfaces articulaires (sinon risque de surdimensionner ou de sous dimensionner la taille de l’implant).

14
Vue 3 D des corps rigides

15
Installation de la station Réglage de la tête optique : • Positionner la tête optique de manière à ce que les lettres identifiant les corps rigides F et T soient au centre du volume de visibilité. Ce réglage est facilité par un laser situé dans le manche orienteur de la tête optique. • Valider la visibilité du palpeur/pointeur P pour palper les malléoles et la cavité intra articulaire. •A gauche de l’écran une zone de visibilité en 3 dimensions des corps rigides, renseigne sur les raisons de la non visibilité des corps rigides:
• si au moins une sphère d’un corps rigide n’est pas visible, la sphère apparaît en rouge et la lettre identifiant le corps rigide également • si une sphère est en conflit avec une sphère d’un autre corps rigide, les sphères concernées et les lettres identifiant les corps rigides apparaissent en orange.
• Si le corps rigide est bien visible il apparaît en vert. • L’invisibilité des corps rigides peut être due à des sources infrarouges parasites (rayon du soleil, lampes chaudes, marqueurs souillés).
• IMPORTANT: A tout moment pendant l’intervention: • La barre de gauche apparaît dés qu’un corps rigide est non visible. • Vous pouvez régler la position de la tête optique:
• Sélectionner le carré de visibilité des corps rigides en bas à gauche • Régler la position du localisateur • Sélectionner à nouveau le carré de visibilité des corps rigides pour revenir au temps opératoire initial
Calibrage de l’écran : • Pointer le palpeur/pointeur en direction du centre de l’écran AMPLIVISION® et valider en appuyant sur la gâchette. • A partir de cette étape il est possible de piloter AMPLIVISION® soit :
• Avec le palpeur/pointeur en appuyant sur la gâchette pour valider • avec la pédale • avec l’écran tactile de la station AMPLIVISION®
• Le système effectue les captures d’écran lorsque:
• l’utilisateur valide une étape avec la pédale bleue • l’on appuie sur l’icône représentant un appareil photo situé en bas de l’écran à droite
• Remarques: • L’utilisateur doit donc s’assurer que les corps rigides utilisés dans cette étape sont bien visibles. • Ces étapes pourront être sauvegardées sur une clef USB en fin d’intervention. • A tout moment pendant l’intervention, vous pouvez régler la position de la tête optique:
- Sélectionner dans la barre des boutons permanents, l’icône avec une croix - Calibrer l’écran et vous revenez automatiquement au temps opératoire initial

16
17
Calibrage palpeur/pointeur et corps rigides Calibrage du palpeur/pointeur : Cette étape se fait en deux temps: • Pour calibrer la pointe du palpeur/pointeur placer l’extrémité dans le cône de calibrage
situé sur le corps rigide T et valider à l’aide de la gâchette. • Sans lever la pointe du palpeur/pointeur, renouveler la même opération en décalant
légèrement l’orientation du palpeur/pointeur et valider.
Point de confiance Tibia : • Positionner la pointe du palpeur/pointeur dans le cône de calibrage se trouvant sur le
support du corps rigide T et valider.
• Cette opération permettra de valider la position définitive du corps rigide T sur son support de fixation. Ainsi tout au long de l’intervention il sera possible de vérifier si cette position n’a pas été modifiée.
Point de confiance Fémur :
• Réaliser la même opération avec le support du corps rigide F.
A tout temps de l’intervention, placer la pointe du palpeur/pointeur dans le point de confiance tibia et/ou fémur. En bas de l’écran à gauche, le message «tibia OK » et / ou « fémur OK » apparaît si le corps rigide n’a pas bougé. Si ce n’est pas le cas, en fonction de l’étape opératoire où vous êtes, soit vous continuez l’intervention de façon conventionnelle, soit vous revenez à cette étape de calibrage.

18

19
Acquisition du centre de cheville Malléole médiale: • Placer la pointe du palpeur/pointeur sur le point le plus distal de la malléole médiale. • Valider la position à l’aide de la gâchette du palpeur/pointeur.
Malléole latérale:
• Placer la pointe du palpeur/pointeur sur le point le plus distal de la malléole latérale. • Valider la position.

20

21
Acquisition du centre de hanche : • La jambe en extension, saisir le talon du patient.
• Appuyer sur la flèche bleue (ou sur la pédale bleue), pour débuter l’acquisition
des points.
• Effectuer un mouvement circulaire avec la jambe, d’un rayon de 15 cm au niveau du genou.
• Une fois l'acquisition finie, le système calcule le centre hanche. Si le résultat est satisfaisant, le système passe automatiquement à l'étape suivante. Sinon le système demande de recommencer l'acquisition. Pendant cette étape, un bip sonore vous indique le début de l’acquisition, un curseur simulant l’acquisition est affiché en bas de l’écran et un bip sonore vous indique la fin de l’acquisition.
Acquisition du centre de hanche

22

23
Acquisition tibiale
Glène médiale: • Le plan frontal du tibia sera déterminé en fonction du choix du chirurgien et tracé au
bistouri électrique sur le plateau tibial (au milieu des glènes) . Ex: parallèle au bord postérieur du tibia • Palper un point au milieu de la glène médiale (sur l’axe précédemment tracé). • Valider la position à l’aide de la gâchette.
Glène latérale: • Palper un point au milieu de la glène latérale (sur l’axe précédemment tracé). • Valider la position.
Centre du tibia • Palper le centre des épines tibiales. • Valider la position à l’aide de la gâchette.

24
25
Numérisation de la surface articulaire tibiale : • L'objectif de cette étape est d'acquérir la surface osseuse du tibia et de contrôler
la précision de cette acquisition. • Placer la pointe du palpeur/pointeur sur la surface osseuse, appuyer et maintenir
l’appui sur la gâchette et déplacer la pointe sur la surface articulaire à acquérir. • Il est préférable de bien dessiner le contour du plateau tibial (taille du futur implant), et
de prendre des points dans la zone où sera réalisée la coupe tibiale.
• Attention : Laisser toujours la pointe du palpeur/pointeur en contact avec la surface tibiale.
• Le démarrage des acquisitions est lancé en appuyant sur la gâchette du palpeur/pointeur, le relâchement de la gâchette met fin à l’acquisition en cours. Un « bip » sonore vous indique le début et la fin de l’acquisition.
• Pendant cette étape, un compteur des points s’écoule en haut à gauche de l’écran. • Lorsque les « zones d’intérêts » indiquées par un cube rouge (zone antérieure, zone
latérale, zone médiale) deviennent vertes cela signifie que la quantité minimale de points pour ces zones est obtenue. Vérifier que les barres vertes dans les vues à droite de l’écran, soient bien au contact de l’os.
• Pendant l’acquisition des points, la surface articulaire se déforme en temps réel et la taille de l’embase tibiale est indiquée en bas à gauche de l’écran.
• Zones d’intérêts: • Elles sont représentées par des cubes et des lignes rouges et fixes au début de
l’acquisition puis vertes et mobiles pendant l’acquisition. • Elles sont au nombre de 3: médiale, antérieure et latérale. • Elles représentent les zones de référence minimum à acquérir pour déterminer la
taille et positionner l’embase
Acquisition tibiale

26

27
Vérification de la précision globale: • Relâcher la gâchette, et déplacer la pointe sur la surface articulaire. Le système calcule
la distance entre la pointe du palpeur/pointeur et le modèle 3D. • Déplacer le palpeur/pointeur sur l’os. Le palpeur/pointeur apparaît en vert lorsque la
distance entre le modèle et la réalité est inférieure au millimètre et en rouge lorsque la distance est supérieure au millimètre.
En cas de mauvaise acquisition:
• Il est possible de supprimer les 20 derniers points acquis en appuyant sur la pédale Jaune.
• Un appui prolongé (plus de 2 secondes) annule la totalité des points acquis.
• Si la précision de la déformation est satisfaisante, valider pour passer à l’étape suivante.
Acquisition tibiale

28

29
Acquisition fémorale
Sommet de l’échancrure:
• Palper le sommet de l’échancrure. • Valider la position à l’aide de la gâchette.
Condyle postérieur médial:
• L’axe des condyles fémoraux postérieurs est défini par l’acquisition d’un point sur le condyle postérieur médial et latéral.
• Palper le point le plus distal du condyle postérieur médial. • Valider la position à l’aide de la gâchette.

30

31
Condyle postérieur latéral:
• Palper le point le plus distal du condyle postérieur latéral. • Valider la position à l’aide de la gâchette.
Acquisition fémorale
Corticale antérieure:
• Palper un point sur la corticale antérieure. • Valider la position à l’aide de la gâchette.
32

33
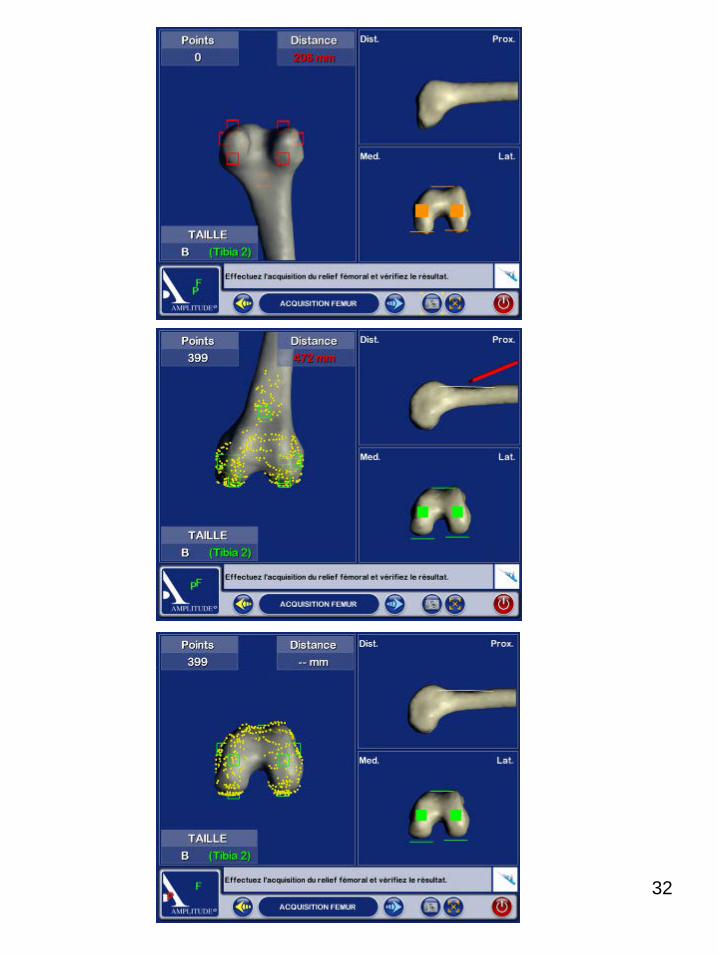
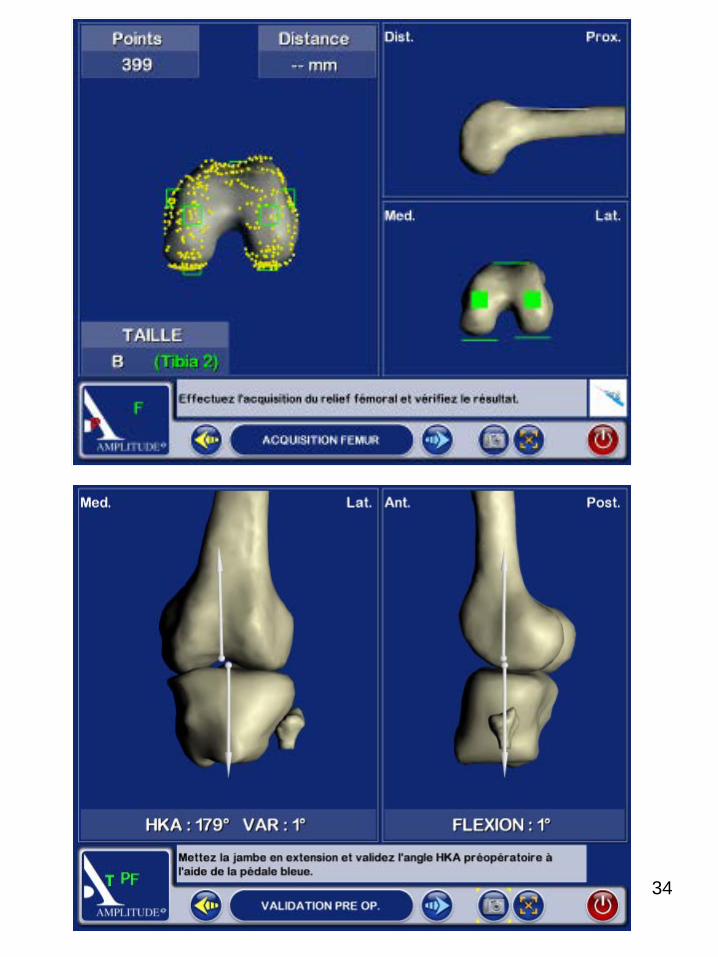
Numérisation de la surface articulaire Fémorale : • L'objectif de cette étape est d'acquérir la surface osseuse du fémur et de vérifier cette acquisition. • Placer la pointe du palpeur/pointeur sur la surface osseuse, appuyer et maintenir l’appui sur la gâchette en déplaçant la pointe sur la surface fémorale à acquérir. • Il est préférable de bien dessiner le contour du Fémur. • A tout moment il est possible de relâcher la gâchette, positionner la pointe du palpeur/pointeur ailleurs et poursuivre l’acquisition en appuyant de nouveau sur la gâchette Attention : Laisser toujours la pointe du palpeur/pointeur en contact avec la surface fémorale. • Le démarrage des acquisitions est lancé en appuyant sur la gâchette (ou sur la pédale bleue), le relâchement de la gâchette met fin aux acquisitions. Un « bip » sonore vous indique le début et la fin de l’acquisition. • Pendant cette étape, un compteur des points s’écoule en haut au centre de l’écran. • Lorsque les 7 «zones d’intérêts » indiquées par un cube rouge (antérieure, distale médiale, distale latérale, postérieure médiale, postérieure latérale, épicondyle médial et épicondyle latéral) deviennent vertes cela signifie que la quantité minimale de points pour ces zones est obtenue. Vérifier que les barres vertes dans les vues à droite de l’écran, soient bien au contact de l’os.
• Pendant l’acquisition des points, la surface articulaire se déforme en temps réel et la taille du condyle est indiquée en bas à gauche de l’écran.
Acquisition fémorale
34
35
Vérification de la précision: • Relâcher la gâchette, et déplacer la pointe sur la surface articulaire. Le système calcule la
distance entre la pointe du palpeur et le modèle 3D. • Déplacer le palpeur/pointeur sur l’os. Le palpeur/pointeur apparaît en vert lorsque la
distance entre le modèle et la réalité est inférieure au millimètre et en rouge lorsque la distance est supérieure au millimètre.
• Il est possible de supprimer les 20 derniers points acquis en appuyant sur la pédale Jaune.
• Un appui prolongé (plus de 20 secondes) annule la totalité des points acquis. • Si la précision de la déformation est satisfaisante, valider pour passer à l’étape suivante. En cas de mauvaise acquisition:
• Il est possible de supprimer les 20 derniers points acquis en appuyant sur la pédale
Jaune. • Un appui prolongé (plus de 2 secondes) annule la totalité des points acquis. • Si la précision de la déformation est satisfaisante, valider pour passer à l’étape suivante.
Acquisition de l’angle HKA Pré opératoire
• Placer la jambe en extension sans contrainte. • Visualiser l’angle HKA pré opératoire. • Valider pour passer à l’étape suivante.
Acquisition fémorale

36

37
Planning tibial
Le point de référence :
• Ajuster si nécessaire la hauteur de coupe indiquée en bas à droite de l’écran, à l’aide
des touches + et – de l’écran tactile. • Palper le point qui servira de référence pour la hauteur de coupe. Entre ce point et la
ligne rouge qui représente le niveau de coupe, il y aura l’épaisseur programmée. Par exemple dans le cas représenté ci-contre, la distance entre le point palpé du côté latéral est à 10 mm de la hauteur de coupe.
Nota: pour choisir votre point de référence, vous pouvez vous aider de la topographie sur le
tibia. Le point 0 en rouge étant le point culminant et en bleu les zones les plus basses. • Sur le bord opposé au côté palpé, il est indiqué la distance entre la coupe tibiale (trait
rouge) et le point le plus bas du plateau. Dans l’exemple ci-contre la distance entre la coupe tibiale et le point le plus bas du coté usé (en médial) est de 8 mm.
• Ainsi l’épaisseur de coupe programmée sera toujours par rapport au point palpé et
l’épaisseur réséquée sur le compartiment opposé sera indiquée pour information.

38

39
Planning tibial :
• Une position et une taille de l’embase tibiale par rapport à la coupe, sont proposées. • La taille calculée du fémur est donnée à titre d’information. • Ajuster éventuellement la taille ainsi que la position de l’implant à l’aide des touches de
l’écran tactile. Pour modifier un paramètre il suffit de sélectionner la position ( il apparaît alors en vert), puis à l’aide des touches de positionnement, modifier les valeurs.
• Pour retourner au planning proposé par défaut, appuyer sur la touche centrale avec les
flèches. • Valider le planning.
Planning tibial

40

41
Coupe tibiale Calibrage du viseur tibial :
• Mettre en place le taraud. • Fixer le corps rigide G sur le viseur tibial. • Mettre en place le viseur sur le taraud. • Placer la pointe du palpeur/pointeur dans chacun des 3 cônes situés sur le viseur tibial et
valider chacune des positions avec la pédale bleue. Le cône acquis apparaît alors en vert. • L’ordre dans lequel cette opération est effectuée n’a pas d’importance.

42

43
Guidage tibial
Navigation de la coupe tibiale :
• L’écran représente les différents plans à naviguer, un code couleur permet d’identifier la
partie du viseur à utiliser. • La valeur planifiée apparaît en vert sur l’écran. • La valeur naviguée apparaît en blanc tant que le viseur n’est pas correctement aligné.
Elle apparaît en vert lorsque l’objectif planifié est atteint (avec une précision de 1° ou 1 mm).
• Le viseur correctement positionné, la valeur et le plan de coupe apparaissent en vert. • Placer les broches lancéolées lorsque toutes les valeurs naviguées correspondent aux
valeurs planifiées. • Valider la position (pédale bleue, ou palpeur/pointeur, ou directement à l’écran).
• Retirer le taraud et le viseur, placer le guide de coupe tibiale sur les broches.
• Effectuer la coupe tibiale.
Acquisition du plan de coupe • Sur une palette tibiale monobloc, monter le corps rigide « G ». • Positionner la palette sur la coupe tibiale réalisée et valider.

44
Spacer réglable

45
En extension: • En extension, le spacer réglable vient combler l’espace entre la coupe tibiale et le
fémur non préparé. Le spacer réglable est pourvu de deux patins mobiles, réglables par vis micrométriques, qui viennent remplir à la demande l’espace du côté souhaité (après ajout éventuel d’une demi cale mobile de 2, 4 ou 6 mm), jusqu’à obtention de l’affichage à l’écran de l’angle HKA voulu. Si besoin, des cales complètes de 2 ou 4 mm peuvent être ajoutées sous le spacer (côté coupe tibiale).
• Une fois l’angle HKA ajusté, le chirurgien peut tester, visualiser et régler la balance ligamentaire par un release ligamentaire et/ou par une modification du positionnement de l’implant fémoral virtuel à l’aide des touches sur l’écran tactile du navigateur.
• A noter que les espaces affichés à l’écran, sont ceux entre la coupe tibiale réalisée et la prothèse fémorale virtuelle dont la position est connue par l’ordinateur.
Simulateur d’angle HKA et d’Équilibrage Ligamentaire
En flexion: • L’équilibre en extension terminé, fléchir le genou à 90°. A l’aide du spacer réglé
pour un encombrement équivalent à la hauteur de l’insert pressenti lors de l’étape précédente (= valeur lue à l’écran entre la coupe tibiale et l’implant fémoral virtuel, en extension), contrôler les espaces en flexion ainsi que la balance ligamentaire.
• Le chirurgien peut, à l’aide des touches sur l’écran tactile du navigateur, simuler la rotation externe de l’implant fémoral virtuel pour affiner si besoin l’équilibre des espaces. Là encore, les espaces affichés à l’écran, sont ceux entre la coupe tibiale réalisée et la prothèse fémorale virtuelle dont la position est connue par l’ordinateur.
Choix d’une coupe distale fémorale supérieure à 10 mm : • Sur les condyles, la zone d’appui entre le condyle prothétique et la coupe distale est
délimitée en noir. • L’épaisseur de coupe sur chacun des condyles est indiquée. • Augmenter l’épaisseur de coupe distale fémorale, à l’aide de l’écran tactile (de 2 mm
en 2 mm) dans les cas où: – la coupe distale d’un des deux condyles est inexistante ou insuffisante, (genu valgum) – le flexum préopératoire est important – il est nécessaire de remonter l’interligne

46

47
Positionnement en médio-latéral: • Pour positionner le condyle prothétique sous la rotule, une aide est disponible. • Sélectionner le bouton « Med./Lat. ». Une vue du condyles apparaît dans la partie
inférieure de l’écran. • Régler la position du condyle prothétique en médio-latéral en fonction de la trochlée
anatomique surlignée en blanc. • Si en distal il y a une surépaisseur due à la prothèse, la valeur est indiquée. • Ces paramètres sont à régler à 30°, 60° et 90° de flexion. Appuyer sur l’image
pour voir successivement ces trois vues.

48

49
Guidage fémoral
Calibrage du viseur fémoral :
• Mettre en place le taraud. • Fixer le corps rigide G sur le viseur fémoral et placer le canon de valgus fémoral suivant
le côté opéré. • Mettre en place le viseur sur le taraud. • Placer la pointe du palpeur/pointeur dans chacun des 3 cônes situés sur le viseur
fémoral et valider chacune des positions avec la pédale bleue. Le cône acquis apparaît alors en vert.
• L’ordre dans lequel cette opération est effectuée n’a pas d’importance.

50

51
Navigation de la coupe fémorale: • L’écran représente les différents plans de coupe à naviguer, un code couleur permet
d’identifier la partie du viseur à utiliser.
• La valeur planifiée apparaît en vert sur l’écran.
• La valeur naviguée apparaît en blanc tant que le viseur n’est pas correctement aligné. Elle apparaît en vert lorsque l’objectif planifié est atteint (avec une précision de 2° ou 2 mm).
• Le viseur correctement aligné, la valeur et le plan de coupe apparaissent en vert.
• Sur la vue en haut à gauche pour le réglage du Varus/Valgus, la coupe osseuse apparaît. Il est donc aisé d’apprécier l’importance de la coupe antérieure par rapport à la corticale antérieure.
• Placer les broches filetées lorsque toutes les valeurs naviguées correspondent aux valeurs planifiées.
• Valider la position en appuyant sur la pédale bleue.
• Retirer le viseur et le taraud.
• Placer le guide de coupe fémorale de la taille déterminée sur les deux broches.
• Le fixer à l’aide des clous à tête et du stabilisateur antérieur.
• Effectuer les coupes.
Navigation de la pré-coupe, en cas de coupe distale fémorale supérieure à 10 mm:
• Après mise en place des broches filetées, utiliser la fraise fémorale distale comme indiqué sur l’écran pour effectuer la pré-coupe planifiée.
• Positionner la fraise sur la broche filetée et la placer au contact du condyle.
• Régler la butée à la valeur de la coupe (à 4 mm si la pré-coupe est de 4 mm) à l’aide des graduations (2 mm par 2 mm).
• Réaliser la pré-coupe distale.
• Retirer le viseur et le taraud.
• Placer le guide de coupe fémorale de la taille déterminée sur les deux broches.
• Le fixer à l’aide des clous à tête et du stabilisateur .
• Effectuer les coupes.
Guidage fémoral

52

53
Préparation de l’échancrure
Centrage du guide de préparation d’échancrure:
• Mettre en place le guide de préparation d’échancrure. • Placer la pointe du palpeur/pointeur dans le cône situé sur la partie antérieure du guide
de préparation d’échancrure. Vous pourrez connaître la distance en médio-latéral entre la position programmée et la position dans laquelle se trouvera le condyle d’essai réel.
• Une fois satisfait de la position, fixer le guide à l’aide de 2 clous à tête et préparer l’échancrure inter condylienne.

54

55
Acquisition de la position définitive: • Placer la pointe du palpeur/pointeur dans chacun des 3 cônes sur le condyle d’essai et
valider chacune des positions avec la pédale bleue ou la gâchette.
Implants d’essai

56

57
Implants d’essai
Position finale du condyle fémoral d’essai :
• L’implant d’essai en gris est superposé à la position de l’implant planifié en vert.
• La taille et la position finale de l’implant sont affichées en blanc et la planification en vert.
Position finale de l’embase tibiale d’essai :
• Monter la poignée pourvue du corps rigide G, sur l’embase tibiale d’essai (de la taille estimée).
• Placer l’embase tibiale d’essai sur la coupe et visualiser sa position en médio latéral et antéropostérieure par rapport à celle planifiée.
• Fixer la position de l’embase d’essai à l’aide de clous à tête.
• Valider la position de l’embase tibiale SOIT en validant avec le corps rigide G monté sur la poignée, SOIT en faisant l’acquisition des 3 cônes de calibration à l’aide du palpeur/pointeur.
• Visualiser la position finale de l’implant d’essai en gris et superposé à la position de l’implant planifié en vert.
• La taille et la position finale de l’implant sont affichées en blanc et la planification en vert.

58

59
Contrôle en extension :
• Placer un insert d’essai.
• Placer la jambe en extension.
• Visualiser l’angle HKA et les espaces (médial et latéral) avec les composants d’essai en place.
Implants d’essai et enregistrement des données

60

61
Contrôle en flexion : • Placer la jambe en flexion.
• Visualiser les espaces en flexion avec les composants d’essai en place. • Valider dans la position souhaitée en appuyant sur la pédale bleue pour enregistrer
la position souhaitée dans le compte rendu opératoire.
• D’autres positions avec différents degrés de flexion peuvent être enregistrées à l’aide de la flèche bleue.
Implants d’essai
Remarque: Cette étape de contrôle peut être réalisée lorsque les implants définitifs seront implantés.
62
Enregistrement du rapport d’intervention
Enregistrer le rapport d’intervention:
• Appuyer sur le bouton rouge pour quitter l’application (en bas de l’écran à droite).
• Valider votre souhait de quitter l’application.
• Valider votre souhait de sauvegarder le rapport de l’intervention.
• Sauvegarder le rapport de l‘intervention en insérant la clé USB dans la connexion située sous l’écran (voir la description de la station) et confirmer la sauvegarde.
• Le rapport de l’intervention est un fichier nommé « rapport.html » qui suit la chronologie de l’intervention en incluant les pages:
• information patient et nom du chirurgien
• le résultat des déformations osseuses
• les pages de planification de coupes osseuses
• les pages de planification de position et de taille des implants
• les pages de validation post opératoire
• Remarque: si vous ne souhaitez pas sauvegarder le rapport d’intervention, appuyer sur « annuler » lorsque le système AMPLIVISION® vous propose de sauvegarder le rapport d’intervention.

63
Rangement de la station
• Lorsque vous avez quitté l’application, la première page apparaît.
• Appuyer sur le bouton « quitter l’application ».
• Valider l’arrêt du système.
• Attendre le message d’autorisation pour éteindre la station.
• Appuyer sur le bouton marche / arrêt vert, situé à l’arrière de la station. Bouton en position « O ».
• Débrancher le cordon d’alimentation et l’enrouler autour du support de cordon d’alimentation, situé à l’arrière de la station.
• Débrancher la pédale.
• Régler la tête optique en position neutre (levée au maximum et sans rotation).
• Procéder au nettoyage de la station et de la pédale (voir le manuel d’utilisation situé dans la valise de transport).
• Verrouiller la colonne mobile: Baisser la poignée de verrouillage et la tirer fortement vers le bas pour descendre complètement la colonne.
• Réintroduire la station dans la valise de transport.
• Placer la pédale et les housses de protection dans la valise de transport.
• Verrouiller les 4 points de fermeture de la valise de transport.

64
Prothèse Totale de Genou SCORE® de Révision
Instrumentation naviguée
65
• En complément de l’ancillaire PTG SCORE® de Révision mécanique/naviguée, il est indispensable de disposer de : - La station de navigation AMPLIVISION® - De marqueurs stériles à usage unique (par boîtes de 14) - D’une instrumentation: version naviguée AMPLIVISION®
L’ancillaire
Marqueurs stériles à usage unique Non restérilisables Conditionnement par boîte de 14 marqueurs
Montage des marqueurs sur les corps rigides.
Marqueurs Stériles
66
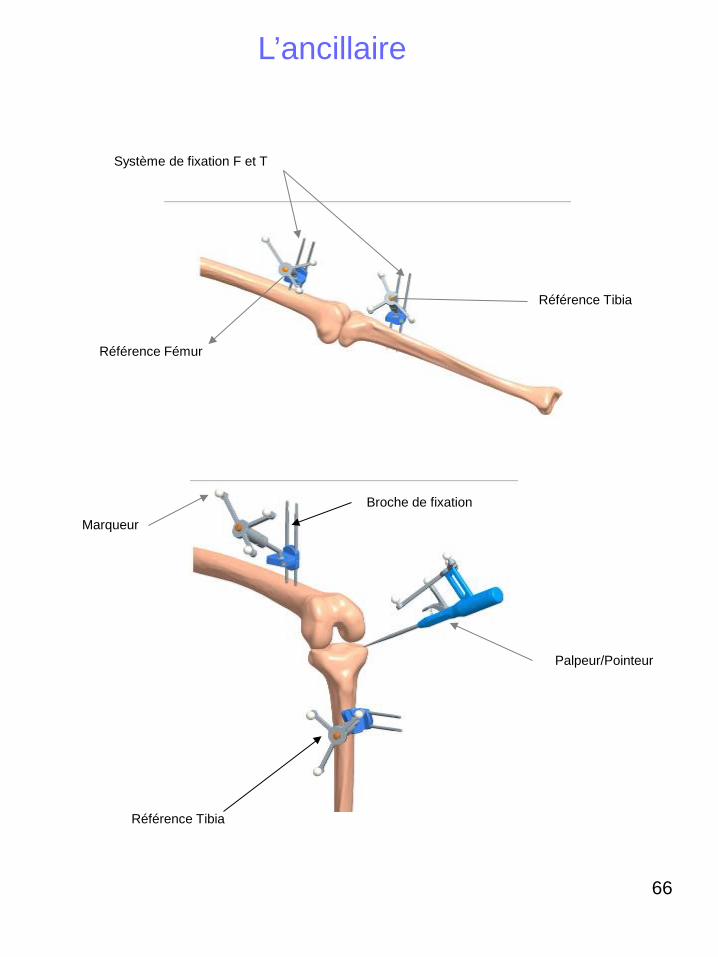
L’ancillaire
Broche de fixation
Système de fixation F et T
Palpeur/Pointeur
Référence Fémur
Référence Tibia
Marqueur
Référence Tibia

67
Ancillaire de Navigation Tibiale
Rotation axiale Couleur Violet
Verrouillage du réglage antéro postérieur et de la hauteur de coupe
Varus/Valgus Couleur Jaune
Hauteur de coupe Couleur Vert
Pente Couleur Bleu
Verrouillage de la potence tibiale sur le taraud
L’ancillaire
Varus/Valgus Couleur Jaune
Guide G

68
Varus/Valgus Couleur Violet
Hauteur de coupe Couleur Vert
Ancillaire de Navigation Fémorale
Flexum/Recurvatum Couleur Bleu
Rotation axiale Couleur Jaune
Verrouillage de la hauteur de coupe et de la fourchette postérieure sur la tige intra médullaire ou le taraud
L’ancillaire

69
Montage de l’ancillaire de Navigation Tibiale
Aligner les repères de positions neutres avant l’intervention
1
2
3 4
5
6
7 8 9
Insérer la molette dans la rainure
Renvoi bleu
Vis de serrage jaune
Vis de serrage violette
Vis de serrage bleue
Bras violet
Axe de translation tibiale
Coulisse tibiale
Molette de réglage tibiale verte
Viseur tibia jaune
L’ancillaire

70
Montage de l’ancillaire de Navigation Fémorale
Aligner les repères de positions neutres avant l’intervention
1
2
3 4 5
7
8
9
Insérer la molette dans la rainure
Molette de réglage fémorale verte
Vis de serrage violette
Viseur fémoral jaune
Vis de serrage jaune
Vis de serrage bleue
Renvoi bleu 6
Bras violet
Fourchette postérieure
Coulisse fémorale
L’ancillaire

71
Instruments navigués • Le palpeur/pointeur
• Cet instrument est utilisé pour acquérir des points précis ou des surfaces sur l'anatomie du patient. Il est également utilisé pour commander à distance certains éléments actifs sur l'écran. Le palpeur/pointeur doit être équipé de quatre marqueurs dont l'un est monté sur la gâchette mobile.
• La poignée universelle et platine d’acquisition de la coupe tibiale
• La poignée universelle naviguée et la platine d’acquisition de la coupe tibiale comportent deux points de fixation pour le corps rigide de guidage (un sur chaque face). Dans chaque point de fixation, on ne peut clipser le corps rigide que dans une seule position et orientation.
Corps rigide fixe.
Marqueur mobile sur la gâchette.
Platine d’acquisition de la coupe tibiale
Poignée universelle naviguée

72
Lames de scie étroites SCORE® de Révision
STRYKER B étroite
SYNTHES AO SODEM étroite
STRYKER 2000 étroite
3M Maxi Driver étroite
ZIMMER HALL étroite
AESCULAP étroite


![AimAnts PermAnents Aimants ndFeB, AlniCo, smCo et … · NdFeB BLS Magnet [6] Aimants permanents BLS Magnet [7] Aimants permanents AimAnts neODYme Nuance Rémanence Rémanence Intensité](https://img.dokumen.tips/doc/110x75/5b915de609d3f210288b829e/aimants-permanents-aimants-ndfeb-alnico-smco-et-ndfeb-bls-magnet-6-aimants.jpg)


























