Embed Size (px)
Citation preview

IEEE TRANSACTIONS ON EDUCATION, VOL 33, NO 3, AUGUST 1990 285
Teaching Control with Laboratory Scale Models PETER E. WELLSTEAD
Abstract-The paper describes an approach to laboratory teaching of control which uses scale models of dynamic systems. The models are selected to illustrate a range of control applications and a variety of forms of dynamical behavior. The scale models are controlled either by continuous time controllers or digitally using PC-based software. The emphasis is upon the fundamentals of control engineering such that the student must perform exercises which make them aware of the instrumentation and modeling aspects of control as well as control sys- tem design and implemetation. The paper describes the pedagogic ba- sis for the laboratory use of scale models and how this is linked to conventional lecture-based teaching.
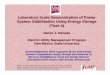
To actuators
System scale Instrumentation model module
From sensors
System output signals
signals
I Controller I I. INTRODUCTION
HE LABORATORY teaching of engineering is an T important way in which to introduce students to the realities of control systems analysis and design. This is particularly true in the United Kingdom where there is a strong tradition of practical learning such that students often find control theory rather abstract. In fact, there is a paradox whereby control is seen by the student as a unifying basis for systems analysis and accordingly is ini- tially a very popular option. Subsequently, however, stu- dents find the theory hard to handle, limited in its appli- cability and become less well motivated. The use of laboratory exercises which illustrate the theory at work in practical situations is one way to resolve this paradox.
The use of scale models to teach control engineering was started in the Control Systems Centre 15 years ago. At that time a large pilot plant together with analog com- puters-simulators were used for laboratory work. The re- sults were unsatisfactory since the pilot plant was only available for limited periods and was unreliable. The an- alog computer-based simulations were suitable for pro- cessing large numbers of students, but were felt to be un- realistic.
It was against this background that a development pro- gram was commenced with the aim of developing a series of scale models which illustrate control system applica- tions. The objective was to capture the realism of a pilot plant but on the scale of a small bench-top device. The analog computers were to be used to implement analog controllers for the scale models, so that students would get experience with analog computers while using them to implement control laws. From an early stage it was
Manuscript received November 22, 1989. This work was supported by TecQuipment Ltd. in the design and development of devices described here- in.
The author is with the Control Systems Centre, EE&E, UMIST, Man- chester M60 lQD, United Kingdom.
IEEE Log Number 9036949.
Fig. 1. Layout of system units.
envisaged that digital control would also be taught. For this reason the equipment was designed to consist of three distinct physical units: the scale model system, instru- mentation module, and the controller (Fig. 1). The con- troller may be any suitable device, even a commercial controller, but is usually an analog computer or personal computer. The instrument module provides all amplifi- cation, power supplies, and signal conditioning require- ments. It accepts and provides signal level voltages from the controller and amplifies and conditions the electrical actuation and sensor data associated with the scale model. As far as the user is concerned the instrumentation unit is simply a “black box” which is his-her interface to the model system; the real interest rests with the dynamics of the scale model. The paper reflects this interest in that the description will focus upon the model systems, the way they are used, and our experiences with them in a peda- godic framework.
The presentation is laid out as follows. Section I1 de- scribes the objectives and organization of the teaching as- sociated with the models. Section I11 briefly describes the models themselves and their relevant dynamical proper- ties. Some typical experimental activities are outlined in Section IV, with Section V providing our view of control engineering teaching from the perspective of our experi- ence with the laboratory models.
11. OBJECTIVES AND ORGANIZATION A. Objectives
The introduction has described the situation which led to the development of scale models for the control engi- neering laboratory. It is, however, interesting to describe the specific teaching objectives within the Control Sys- tems Centre since these motivated the development. The main objective is to give senior undergraduate and Master of Science students an appreciation of applied control over
0018-9359/90/0800-0285$01 .OO O 1990 IEEE

286 IEEE TRANSACTIONS ON EDUCATION, VOL. 33, NO. 3, AUGUST 1990
a wide range of applications. Typically, Master of Sci- ence students will come to us from a variety of engineer- ing backgrounds, with an increasing number of students taking in a one-year Master’s degree in control and infor- mation engineering as a conversion course from a first de- gree in mathematics or physics. This wide range of pre- vious background makes it important that the control laboratories be capable of spanning most major control application areas. In this way the students will gain a wide exposure and be able to recognize the characteristic dif- ficulties associated with the different areas.
In the same spirit, it is important that the laboratories are linked to lecture material. Thus, in addition to con- troller design issues, the students will meet mathematical models of the laboratory scale models in lectures [l] and be exposed to the instrumentation used in the models [2]. In the latter connection, it is important to note that at- tempts have been made to vary the type of sensing and actuation devices used to show a range of techniques in the laboratory.
B. Organization Because the laboratory activity is associated with rela-
tively small postgraduate classes (about 30 students is typical), the timetabling problem associated with large classes does not occur. The main problem is providing sufficient access to the laboratories. Specifically, there are six different system models and each of these has at least four possible associated experimental sessions. The ses- sions range through the following activities:
a) Sensor and actuator calibration. b) Dynamic response measurement. c) Continuous time controller implementation. d) Digital controller implementation.
These activities are built into the experimental progress because they are a fair representation of a practicing con- trol engineers work sequence. Because of this it is felt desirable to run the students through the complete se- quence a), b), and c) with the digital option d) being per- formed on a comparative basis with the continuous con- troller experiment [activity c)]. All of this takes a minimum of two afternoon sessions per scale model.
The above paragraph describes the basic laboratory ac- tivity at the Control Systems Centre. The basis exercises are supplemented by extended ‘ ‘design exercise” ses- sions during which the scale models are used for longer term open-ended practical studies. In addition, the labo- ratory models are also available for demonstrating Ph.D research results (e.g., [3]). In addition, although the scale models were developed in a postgraduate teaching envi- ronment they have successfully been transferred to un- dergraduate teachings, see for example [4].
111. DESCRIPTION OF THE MODELS [5] As noted previously the models were chosen to repre-
sent prototype dynamical systems from the various branches of control system engineering. In this respect,
the following areas were selected as being representative:
i) fluid-level regulation ii) engine-speed control
iii) material-transport systems iv) angular position and velocity servo control.
In the same spirit, the models are so configured that a whole range of dynamical systems analysis techniques can be demonstrated. This point is elaborated in later sec- tions; for the moment we consider the specific models themselves.
The Coupled-Tanks System Fig. 2 shows in schematic form, the scale model used
to illustrate fluid-level and flow control problems. The system consists of two transparent tanks which are linked by an orifice. Water is pumped into tank 1 at a rate deter- mined by the speed of a positive-displacement rotary pump. In turn, this is determined by the control signal voltage applied to the pump. The water flows from tank 1 into tank 2 and finally out through an outlet tap. The principal control object is to regulate the level H2 in tank 2, and to this end a simple fluid-level transducer is sup- plied. A further level sensor can be installed in tank 1 to provide a measurement of level H I . In turn, this second measurement can be used to provide complete state infor- mation concerning the system. Equivalently, it may be used as a minor loop feedback variable in a classical con- troller realization.
The tank physical dimensions are selected such that the dominant time constant is 200 s. The coupled-tanks model therefore allows the control theory which is applicable to relatively slow process systems to be illustrated. By the same token, the linearized system time constants vary with the selected steady-state operating level, so that operat- ing-point-dependent nonlinearly can be simple demon- strated. Also, by the simple addition of a second pump, flowmeter and an outlet office to tank 1, a simple second- order multivariable system can be created. The degree of (open-loop) interaction in this multivariable system is de- termined by the size of the intertank orifice and the steady- state level difference I HI - H2 I. The decoupling power of various closed-loop multivariable controllers can thus be examined for various degrees of open-loop interaction.
Engine-Speed Control System This equipment is built around a precision-engineered
scale-model steam engine (Figs. 3 and 4), with the key object being to place the engine under closed-loop speed control. The equipment consists of a twin-cylinder verti- cal steam engine (Fig. 3) equipped with optical speed sen- sor and driven by compressed air. The engine speed is governed by the air flow to the engine, and this in turn is determined by the position of a motorized valve. The con- trol input provides a drive voltage for the valve motor which causes the valve to open or to close at a speed pro- portional to the drive voltage. The valve is essentially an integrator (with a nonlinear gain characteristic associated

i n p u t pump flowrote 7
Tank 2 i
Tank 1
Fig. 3 Scale model stearn engine
-Compressed air
Motor ised valve
SteoA engine
M o t o r i s e d va l ve S t e m engine
r---#----------- 1 / - 9
l r s T h- Engine
,nput pon i t i o n speed
Fig 5 . Bloch diagram OT engine s)\teni
The equipment is instrumented such that the air-valve position and engine speed are available for feedback com- pensation. Thus. local compensation of nonlinear valve characteristics may be demonstrated by feedback of the valve position. In the same spirit, provision is made for a dither signal to be applied to the valve motor. The main aim of the equipment is to demonstrate nonlinear com- pensation using dither signals, sequential loop-closure methods of controller design and ultimately closed-loop speed control of a reciprocating engine. An interesting feature of the model is the use of compressed air as the motive agent in place of steam. This has the merit of being intrinsically safe for student use and yet allows the real- istic demonstration of reciprocating engine control. This is of specific interest since such engines are one of the few examples of engineering systems which are intrinsi- cally sampled data in nature. Engine lubrication is pro- vided via the air stream. using an industrial oil-mist lu- bricator of the type used in pneumatic control systems and machine-tool cutter lubrication.
An Open-Loop Unstable System-The Ball-arid-Bcam System [a
The model used to demonstrate the dynamics of unsta- ble systems is the ball-and-beam apparatus (Fig. 6). This consists of a beam pivoted at the center and free to t i l t about the horizontal under the action of linear actuator. The top edge of the beam is grooved to allow a steel ball to roll along it. The beam angle is measured by a capac- itive transducer, and the ball position is detected by means of a potentiometric method in which the ball acts as the voltage tap. To a reasonable approximation the transfer function between the actuator input and the ball position is a double integator. It is thus probably the most simple type of open-loop unstable system that can be con- structed. Moreover, its dynamical behavior relates closely to the type of problem encountered in the stick-balancing problem.
At1 Adiianced dc Ser~~oinerliatiisni Trciiiier-The Ball- and-Hoop System [ 7j
Fig. 4 . Enginc control \ ys len i .
with static friction). The engine with its flywheel inertial load can be modeled as a first-order system (see the block dia;!rain of Fig. 5) . The engine load was selected so as to givt,:. an approximate time constant (see Fig. 5 ) of 5 s.
'This system (Fig. 7) began life as a dynamical model of liquid slop in a cylindrical vessel. T o be specific, the oscillations of a steel ball on the inner periphery of a hoop are closely related to fluid-slop inside a cylindrical con- tainer. In its final form. the ball-and-hoop forms an ad- vanced dc servomechanisms trainer. The system consists

288 IEEE TRANSACTIONS ON EDUCATION. VOL. 33, NO. 3. AUGUST 1990
Beam
I - I
1 1
L o t Fig. 6. Ball and beam system.
Jockey pulley /
Hoop
Fig. 7. Ball and hoop system.
of a dc servomotor with a large hoop mounted directly on the motor shaft. The motor is equipped with an integral tachogenerator, while the shaft angular position is sensed by an angle transducer mounted at the rear of the motor. With no ball inside the hoop the system is a dc servome- chanism with control input feeding the motor drive am- plifier, and with two outputs (the hoop angular position and the hoop angular speed). In this form all the normal techniques of angular position and velocity control of an inertial load can be demonstrated. Beyond this, the sys- tem is made more interesting by the addition of the ball which can be placed in the hoop and engaged in a yoke mechanism which permits the angle of the ball relative to the vertical to be measured. This so-called “slop-angle” measurement is brought out to the instrumentation module front panel and constitutes a third output, which is used to study liquid-slop behavior and compensation. Such studies lead to the broader notions of pole-zero movement in a manner outlined in subsequent paragraphs and else- where [7].
The equipment is designed such that the motor/load as- sembly has an open-loop time constant of approximately 10 s. The dynamical behavior of the slop angle is related to the hoop angular position by a lightly damped second order system with a damping factor of approximately 0.1 and natural frequency 10 rad/s. The transfer function also incorporates two zeros whose locations can be manipu- lated to illustrate nonminimum phase behavior and trans- mission zeros on thejw axis in the complex plane.
A Material Transport System-ne Coupled-Drives System
The aim of this system is to illustrate the type of prob- lems encountered in the production and transport of con-
Drive‘ntotor 1 Drive motor 2
Fig. 8. Coupled drive system.
tinuous webs of material such as textile yam, paper, mag- netic tape, strip metal, and plastics. The equipment consists (Fig. 8) of two identical dc motors which are cou- pled by a continuous flexible belt. The belt passes over pulleys mounted directly on the motor shafts and over a jockey pulley. The control objective is to regulate the belt speed and tension at the jockey pulley. The control inputs are the drive voltages to the dc servomotor amplifiers. The servomotors are equipped with tachogenerators; however, the primary output variables are the belt tension and speed as measured at the jockey pulley. Accordingly, the jockey pulley is equipped with a tachogenerator for speed mea- surement. In addition, the jockey pulley is mounted on a swinging arm, the deflection of which provides a mea- surement of belt tension via noncontact capacitative trans- ducers. In this basic form the coupled-drives system is a two-input/two-output process in which the two outputs are strongly interacting. The speed and tension control can be decoupled in a simple intuitive manner, to be explained in a subsequent section.
IV . EXPERIMENTAL ACTIVITIES As noted in Section 11, the experimental activities for
each model are intended to cover the basic aspects of in- strumentation, dynamical response measurement, and controller implementation. In the following paragraphs, we highlight some of the key issues and philosophy un- derlying the experimental work in each of these areas.
Instrumentation The scale models are intentionally equipped with a wide
range of sensing and actuation devices. The experimental sequences involve the students measuring the character- istics of the instrumentation in a form suitable for con- troller design. Thus, the student gains exposure to instru- mentation components within the context of their use in a control system. This provides orientation and additional motivation to students attending classes on actuators and sensing technology [2].
Modeling and Dynamical Response Measurement The mathematical modeling of the laboratory equip-
ment is handled in classes on system dynamics [l]. This leads to a set of transfer function or state space represen- tations of the system’s dynamics. In the laboratory the

students are asked to use direct m d indirect methods to preted Basic as the programming language. Indeed s tw determine the coefficients of the mathematical represen- dents are encouraged to modify the software and tation.,. These range over the following procedures: in co rpo ra t e the i r own feat u res .
a ) Frequency response measurement-used with the coupled drives to characterire the frequency responses ot the fo 11 r input ~ o u t pu t c ha n n e 1 s .
b) I.;tep response measurement-used with the coupled tanks and engine speed control system to determine the doni i I' ant t i me constant .
c ) 1)irect transient response measurement-used i n the ball ai-id hoop to determine the damping Factor and natural frequc,ncy of the ball oscillations.
These basic procedures are supplemented by additional system identification methods for closed loop identiti- cation of open loop unstable systems (for the ball and beam 1 . and in direct measurement procedures for an un- derlying nonlinear dynamical model ( f o r the coupled tanks I .
Coilti 01 S ~ ~ S I C I I I L)(',sI',~ti-C(~iitiiiiioii.s Tiiiie
As noted previously. both continuous and discrete time contrc,81 system implementations are taught. Continuous contrc,lller forms which are included are lis follows:
a ) 'Three-term control (for the coupled tanks). b) IPhase advance control (ball and beam). c ) Position and rate feedback (ball and hoop). d ) :Zero assignment by fcedforward (ball and hoop). e ) tkquential loop closure and dither compensation of
f ) !Multivariable frequency response compensation actuaior nonlinearitives (engine speed control).
( CO u p 1 ed d ri ve s ) .
Th,: continuous controllers arc implemented using bencti top analog computers. Despite the trend toward digit211 control we intend to retain the analog control ex- perimental work. There arc important reasons for this - namely analog controllers are often the correct technical solutim to a control application. Also continuous time and disc ri: t e t i me co n t roll er i ni p 1 e mentation s of os t e n s i b I y the same control law are actually rather ditferent objects. The task c.~f iniplementating both types of control on the same s y stei n emphasires to the student the distinctive design and pN-rformance criteria associated with either technique.
Th,: properties of digital control algorithms are taught within the frame work of a personal computer package. Undtmr this arrangement the student is provided with a dig- ital control software package for each scale model. Each pack,i.ge has preprogrammed within i t the digital control law Lippropriate to the scale model under consideration. All pickages have a coiiitnoti user interface and share fa- cilitics such as screen dumping. reporting. and documen- tatioii. In fact. the packages consist of a single shell in which any desired control law may be easily installed. This eases the software cie\elopment procedure greatly and wakes it straightforward to extend or modify the al- gorithms. This task is made easier by the use of inter-
The software structure and tj,pical result\ associated with the packages are illustrated in 18) anti 191 (see also 131). Therefore in the remainder of this section we will focus upon the main teaching ob.iectives associated with the package. In particular. since we use prcstructured control software we are r 7 o r teaching real-time control software methods. Rather the intention is to show the p rac t i c a I perform a nce character i s t i c s o f \, ;i r i o u s d i g it ;t I control laws. The relative influence of controller param- eters can be inspected since the software allou s the coti- troller parameters to be changed on-line. Beyond this the student my vary the following parameters on-line.
i ) Sample interval. i i ) Integral saturation limit.
i i i ) Actuation signal saturation and rate limits. i v ) Set - po in t p re prog ra ni in g ,
As is clear from the nature of the above list. all thc items consider controller features which are unique to dig- ital controller inplenienrations. Moreover. they are all a\- pects of a controller \ihich are selected on the basis of engineering guidelines and professional judgement. The ability to adust such parameters on-line is in\-aluable in building insight and judgemental abilit) in the student en- gineer.
V I . C0NC.LL.SIOU This paper has described an ongoing exercise in labo-
raton. development at the Control S J steins Centre UMIST. The genesis of this development programme mas described a decade ago [ 51, It is therefore useful to reap- praise subsequent developments in the use of model s > ~ - tems in the control teaching laboratorq.. First. i t is impor- tant to note that we have continued to develop small scale versions of archetypal control problems and applications. However. the reason for the development has changed to mirror the straitened economic climate in which univers- ities currently operate. In particular. the development of new models is geared in some way to the wider industrial- commercial exploitation of ne" results. Thus. for e x a n - pie a small scale extruder-heater system has been de\,el- oped and is in current use for student design exercises. However. i t was originally built to illustrate the problems of self-tuning control of slou thermal systems. Similarlq . a model continuously variable transmission (CVT) systeni is currently being used to demonstrate ne\% results in self- adaptive extremum control I I O ] for automotive cruise control. Likewise other models exist [ 1 1 1 with the mutual r a i m i d'ctre that the): "demonstrate a noi,el control tech- nology." This concept of scale models as "technology demonstrators" is fundamental to our continued labora- tor) activities and t.itallq important in illustrating to po- tential research sponsors our abilitq to produce working schemes. albeit using scale models which \vi11 subsc- quentlq find wrvice in the teaching laborator> ,

290 IEEE TRANSACTIONS ON EDUCATION, VOL. 33, NO. 3, AUGUST 1990
VII. ACKNOWLEDGMENT The laboratory scale models described in this paper only
exist because of the professional commitment and per- sonal enthusiasm of the Control System Centre technical support staff. Specifically, R. Moody protoyped all the mechanics. Various staff members contributed to the elec- trical circuit design and construction. In chronological or- der these are V. Chimes, R. Bevans, K. Wilbraham, M. Glover, and D. Hutchinson.
REFERENCES [l] P. E. Wellstead, Introduction to Physical System Modeling. New
York: Academic, 1979. [2] G. C. Barney, Intelligent Instrumentation, 2nd ed. Englewood
Cliffs, NJ: Prentice Hall, 1989. [3] M. Marcos, “Control digital direct0 aplicado a servosistemas: Un
puenta entre la teoria y ca practica,” Ph.D. Thesis, Univ. Bilbao, 1989.
[4] R. Ball and R. Pratt, Engineering Applications of Microcomputers- Instrumentation and Control Englewood Cliffs, NJ: Prentice Hall, 1986.
[SI P. E. Wellstead, “Scale models in control system engineering,” Trans. Inst. M. C., vol. 2, no. 3, 1980.
[6] P. E. Wellstead, V Chrimes, P. R. Fletcher, R. Moody, and A. J. Robins, “Ball and beam control experiment,” Inr. J . Elect. Eng. Educ., vol. 15, p. 21, 1989.
[7] P. E. Wellstead, “The ball and hoop system,” Auromutica, vol. 19, no. 4, 1983.
[8] D. Jordan and P. E. Wellstead, “Personal computers in laboratory teaching of control,” in Proc. 1st U.K. Con$ Computer-Aided Teach. Contr., Cambridge, U.K., 1986.
[9] P. E. Wellstead, “Personal computers in the laboratory teaching of identification and control,” in Proc. IFAC Identification Syst. Param- eter Esrimut., York, U.K., 1985, pp. 575-579.
[IO] P. E. Wellstead and P. G. Scotson, “Self-tuning extremum control,” in Proc. IEE., Pt. F, 1989.
[ 111 P. E. Wellstead and R. Jones, “An intelligent control systems apar- atus for the control engineering laboratory,” in Proc. IFAC Symp. ” Trends in Contr. Measurement Educ. Swansea, U.K., 1988, pp. 291- 296.
Peter E. Wellstead received the B.Sc. degree in electrical engineering from Hatfield College of Technology, England, and the M.Sc., Ph.D., and D.Sc. degrees from the School of Engineering, University of Warwick, Warwick, England.
He has worked for Marconi Instruments Ltd., first as an apprentice and subsequently as a design engineer. From 1970 to 1972 he was a Technical Fellow at the European Center for Nuclear Phys- ics working on real-time control and image pro- cessing. He is currently Reader in Control Engi-
neering at the Control Systems Centre, UMIST, where his teaching includes system modeling and the development of novel laboratory equipment. His current research interests adaptive systems and automotive control sys- tems.