Embed Size (px)
Citation preview
R&D Software + Motion Control Révision: 1.5 Page: 1/54 File: R&D-SW+MC\§T-expNC_Study.doc
Expectation on Numerical Command
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 2/54 File: R&D-SW+MC\§T-expNC_Study.doc
1. Objet 1.1. Nom Etude et perspective technique concernant les commandes numériques.
1.2. Description Ce document récapitule d'abord la fonction, les principes, les architectures et les déploiements d'une commande numérique. Ensuite, il décrit les perspectives offrant les meilleurs potentiels. Et il se termine en proposant une feuille de route pour passer de l'actuel au futur.
1.3. Domaine Contrôle de processus, de mouvement et de positionnement.
1.4. Liens 1.4.1. Références http://www.boschrexroth.com/business_units/brc/subwebsites/product_catalogue/en/antriebstechnik_en/indradrive_mi_en/index.jsp http://www.automation.siemens.com/mc/mc-sol/en/8ecc45b0-3694-4dd5-8dff-7774d518da2a/index.aspx?c=r-posmo http://www.lenze.com/lenze.com_en_active/020_Products/040_Distributed_drive_technology/ http://www.sew-eurodrive.ca/8_news/02_press_releases/0305_swc835-product-awards.pdf http://www.designnews.com/article/8076-Integrated_motor_drive_combinations.php http://www.drivescontrol.com.sg/mez-siemens/combimaster-standard.html http://www.ecpe.org/download/publications/Paper_Maerz_CPES2005.pdf http://www.industrialtechnology.co.uk/index.php?pageId=47&aid=1162 http://nord.com/cms/media/documents/bw/F3010_GB_2908.pdf http://www.triomotion.com/tmt2/sitefiles/home2.asp http://www.animatics.com/web/what_can_you.html http://www.cpes.vt.edu/public/research/imds.php http://www.sew-eurodrive.com/produkt/C21.htm http://www.blufftonmotorworks.com/imds.html http://www.micosusa.com/Con_5018.html http://www.jvluk.com/servo_motors.html http://www.eobd.fr/multiplexage.htm http://www.tornos.ch/prd-ds-f.html http://www.beckhoff.com/ http://www.synqnet.org/ http://www.plcopen.org/ http://www.isa.org/S88/ http://www.step-nc.org/
1.4.2. Issues Perspectives d'architectures NC pour 2009, 2011, 2013, 2015, ...
1.5. Intervenants / Contacts • Jean-Claude Pourchet R&D Software + Motion Control +41 324 944 562 [email protected] •
1.6. Responsabilités & Historiques Rév. Date Auteur Resp. Description • 1.0 22.09.08 JCP PhJ 1ier jet, §3. §5. • 1.1 10.10.08 JCP PhJ §4. §6. • 1.2 14.10.08 JCP PhJ §7. §8. • 1.3 16.10.08 JCP PhJ §2. • 1.4 20.10.08 JCP PhJ §8. §7.4. • 1.5 30.10.08 JCP PhJ §5.4. §7.5. §7.6. §7.7. •
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 3/54 File: R&D-SW+MC\§T-expNC_Study.doc
2. Sommaire 2.1. Plan 2.1.1. Fonction Une commande numérique désigne l'ensemble des matériels et logiciels ayant pour fonction de donner les instructions de mouvements à tous les organes d'une machine-outil. 2.1.2. Principes Une commande numérique est par essence programmable par l'utilisateur. On recense plusieurs principes de programmation qui influencent peu ou prou l'architecture de la commande numérique. Les différentes interprétations de langages ISO comme la compilation de cames virtuelles offrent des avantages et des inconvénients; la voie médiane de l'ISO segmenté s'inscrit dans la mutation logicielle en cours. 2.1.3. Architectures Une commande numérique peut être structurée de diverses manières tant en interne qu'en externe. Son architecture est influencée par le principe de programmation, par les moyens de communications et par le choix du déploiement des éléments intervenants entre le programmeur, l'opérateur et les organes de la machine-outil. A une architecture centralisée, fermée, lourde, limitée, propriétaire et rigide, il semble évident qu'une architecture décentralisée, ouverte, agile, expansible, standardisée et flexible offre plus de potentiels. 2.1.4. Déploiements Le déploiement d'une commande numérique nécessite des câbles et des conditionnements électriques propres. Au même titre que l'industrie automobile, mais avec 15 ans de retard, l'industrie de la machine-outil va devoir choisir de déployer ses commandes numériques en adoptant la technologie du multiplexage. 2.1.5. Solution Après avoir passé en revue les principes, les architectures et les déploiements, la solution de la commande numérique distribuée s'impose d'elle-même et offre les meilleures perspectives tant en matière de réduction des coûts qu'en matière d'augmentation des performances et de la sécurité. 2.1.6. Synthèse La dernière partie propose en guise de synthèse, une feuille de route pour passer par étapes de la commande numérique actuelle à la commande numérique distribuée.
2.2. Recommandations 2.2.1. A court terme • traduire ce document en japonais... • généraliser les consoles "PC-WINTEL" à toutes les machines. • cesser d'investir dans les cames virtuelles PTO et orienter SW-Platform vers l'ISO segmenté. • initier un partenariat avec un fournisseur d'ampli-moteur-codeurs intégrés ouverts aux standards. 2.2.2. A moyen terme • adopter un conditionnement électrique distribué pour le processus machine (hormis motion control). • contrôler le processus machine (hormis motion control) depuis la console "PC-WINTEL" via un fieldBus. • restreindre le rôle fonctionnel de la commande Fanuc uniquement à la partie motion control. • développer le concept Local-NC avec le partenaire fournissant les ampli-moteur-codeurs. 2.2.3. A long terme • déployer les modules commandés numériquement selon Local-NC. • généraliser le conditionnement électrique distribué à tous les organes machine. • développer sur la base SW-Platform les fonctions Net-HMI, Net-Custom et Net-NC.
2.3. Gains d'ici 2015 • réduction du TCO de 30%, de la taille des armoires de 70% et du temps de câblage de 85%. • amélioration de la sécurité et de la précision de conduite des trajectoires d'un facteur 100.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 4/54 File: R&D-SW+MC\§T-expNC_Study.doc
3. Fonction 3.1. Machine à commande numérique http://fr.wikipedia.org/wiki/Commande_num, Une machine-outil à commande numérique (MOCN) est une machine-outil dotée d'une commande numérique. 3.1.1. Définition Dans le domaine de la fabrication mécanique, la commande numérique désigne l'ensemble des matériels et logiciels ayant pour fonction de donner les instructions de mouvements à tous les organes d'une machine-outil : • l'outil (ou les outils) d'usinage (fraise, foret, laser, jet d'eau, etc.) équipant la machine, • les organes où sont fixées les pièces, • les systèmes de magasinage et de changement d'outil, • les dispositifs de changement de pièce, • les mécanismes connexes, pour le contrôle ou la sécurité, l'évacuation des copeaux,etc. 3.1.2. Généralités Par extension, on appelle «commande numérique» l'armoire de commande recevant le programme d'usinage sous forme d'un ruban perforé, d'une bande magnétique, ou de données issues d'un ordinateur. On désigne parfois ainsi la machine complète équipée d'un tel dispositif. On parle d'un tour à commande numérique, ou d'une fraiseuse à commande numérique, par opposition à un tour conventionnel ou une fraiseuse conventionnelle, dont les mouvements sont commandés manuellement ou par un dispositif automatisé d'une façon figée. Les machines-outils spécialisées (aléseuses-perceuses, fraiseuses) à commande numérique ont évolué en centres d'usinage à commande numérique permettant d'usiner des formes complexes sans démontage de la pièce. Ces centres d'usinage sont généralement équipés de magasins d'outils (tourelles, tables, chaînes) sur lesquels sont disposés les différents outils. Les changements d'outils équipant la (ou les) tête(s) d'usinage sont programmés en fonction de la définition numérique de la pièce. Le fichier de définition numérique (qu'on appelle aussi "DFN", définition numérique, numérisation ou même tout simplement "num") est un fichier informatique généré par CAO, qui remplace de plus en plus le plan sur la traditionnelle planche à dessin. CATIA est actuellement l'un des logiciels les plus utilisés pour établir les DFN dans le domaine de l'automobile et de l'aéronautique. Sur ces définitions doivent ensuite être calculés des parcours d'outil au moyen de logiciels de FAO. Ces parcours seront ensuite traduits dans un langage compréhensible par la «commande numérique». 3.1.3. Origines de la commande numérique C’est en 1942 aux États-Unis que la C.N. a commencé à être exploitée, pour permettre l’usinage de pompes à injection pour moteurs d’avions. Il s’agissait en fait de cames, dont le profil complexe était irréalisable au moyen d’une machine traditionnelle. 3.1.4. La structure d'une machine à commande numérique Les programmes d'usinage sont réalisés à partir d'une origine appelée Origine Programme (OP) positionnée par le programmeur. Le programme commande les déplacements relatifs entre le brut et les outils dans le but de réaliser l'usinage de la pièce finale. Ces déplacements sont réalisés dans un repère orthonormé normalisé (O: x, y, z) basé sur la structure de la machine. L'axe z de ce repère est un axe confondu avec celui de la broche de la machine. Le sens positif de cet axe est donné par le sens d'éloignement de l'outil par rapport à la pièce. La détermination de l'axe x entre les 2 axes restants se fait en identifiant celui qui permet le plus grand déplacement. Le sens positif de x est déterminé par le sens logique d'éloignement de l'outil par rapport à la pièce. L'axe y est déterminé à partir de x et z grâce à la règle du trièdre direct.

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 5/54 File: R&D-SW+MC\§T-expNC_Study.doc
3.2. Programmation de commande numérique http://fr.wikipedia.org/wiki/Programmation_de_commande_num. La programmation de commande numérique (CN) permet de piloter des machine-outils à commande numérique. C'est le directeur de commande numérique (DCN) qui interprète les instructions, reçoit les informations des capteurs et agit (par l'intermédiaire d'un variateur électronique) sur les moteurs. Il existe plusieurs fabricants de DCN : Fanuc, NUM, Heidenhain, Mitsubishi, Siemens, Okuma, Makino, Fagor, Selca, Fidia, MAZAK, ... 3.2.1. Langage À l'origine, le langage de programmation était le G-code, développé par l'EIA au début des années 60, et finalement normalisé par l'ISO en février 1980 sous la référence RS274D/ (ISO 6983). Compte tenu de l'absence de développements ultérieurs, de la grande variété des configurations de machines-outils, et du peu de demande pour une réelle interopérabilité, peu de contrôleurs à commande numérique respectent ce standard. Des extensions et variantes ont été ajoutées indépendamment par divers fabricants, ce qui fait que les opérateurs doivent connaître les différents dialectes et particularités des machines qu'ils utilisent, et les systèmes de CFAO doivent se limiter au plus petit dénominateur commun des machines qu'ils commandent. Beaucoup de fabricants ont essayé de contourner cette difficulté à rester compatible en suivant la route tracée par Fanuc. Malheureusement, Fanuc n'est pas conforme à la norme RS-274 ou à ses précédents standards, et a été lent à ajouter de nouvelles fonctionnalités et à utiliser la puissance croissante des ordinateurs. Par exemple, ils ont transformé la commande G70/G71 en G20/G21; ils ont utilisé des parenthèses pour les commentaires, ce qui à causé des problèmes lors de l'introduction des calculs mathématiques; ils n'ont commencé à utiliser les nanomètres que récemment (ce qui requiert 64 bits); ils ont introduit les NURBS pour compenser le faible débit des blocs depuis la mémoire (au lieu de mettre en place un cache). Depuis l'établissement de la norme ISO 6983, et les technologies évoluant rapidement, de nombreuses extensions ont été ajoutées pour tenir compte des nouveautés et des nouvelles capacités des machines-outils. Ces extensions, bien que souvent utiles chez des constructeurs différents de Directeur de Commande Numérique, n'entrent pas dans la norme et compliquent la tâche des logiciels de fabrication assistée par ordinateur, qui doivent créer les lignes de ce langage pour un DCN particulier. À côté de l'ISO, de nouveaux codes sont apparus, différents selon le Directeur de Commande Numérique. Ils intègrent de plus en plus, en plus de l'ISO, des langages propres aux constructeurs de DCN (symbolique, C, etc) ainsi que des interfaces de programmation conversationnelle destinées à simplifier la programmation (voir CN Mazak ou Heidenhain). 3.2.2. Les familles de codes • Fonctions préparatoires (G), fonctions d'appel de mode d'interpolation (G 0), cycles machine • Coordonnées de points (X, Y, Z, I, J, K) • Vitesses, avances… (S, F) • Fonctions auxiliaires (M) qui permettent d'enclencher la lubrification, de changer d'outil, ou de déclencher des
accessoires.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 6/54 File: R&D-SW+MC\§T-expNC_Study.doc
3.2.3. Les codes. • X position absolue • Y position absolue • Z position absolue • A position (rotation autour de l'axe X) • B position (rotation autour de l'axe Y) • C position (rotation autour de l'axe Z) • U position Relative • V position Relative • W position Relative • M code Fonction "Machine" ou "Modale" (un autre type d'action ou de code machine), parfois référencé
comme fonction 'diverse' ("Miscellaneous" en anglais), ils permettent aussi de contrôler des entités externes à la machine proprement dit (magasin auxiliaire, refroidisseur, compteur, etc...). Les codes M contrôlent l'ensemble de la machine, permettant son démarrage, son arrêt, la mise en route de l'arrosage, etc. Alors que les autres codes concernent les trajectoires de l'outil.
• D association d'un correcteur de jauge outil • F vitesse de déplacement • S vitesse de rotation • C s'il est intégré dans un bloc de cycle fixe ébauche ou finition, C désigne un chanfrein • N numéro de ligne; le numéro de bloc n'est pas obligatoire à chaque ligne avec les commandes ISO Fanuc, il
désigne juste un endroit du programme où l'on peut ordonner un saut d'opération ou un départ d'opération, le plus souvent avant un changement d'outil
• V permet de contrôler une vitesse de rotation dans une machine avec diverses configurations • R Rayon d'arc ou option passée à un sous programme • P Temps de pause ou option passée à un sous programme ou appel de sous programme (après M98 par ex). • T Sélection d'outil • I Axe X des données d'un arc • J Axe Y des données d'un arc • K Axe Z des données d'un arc • D diamètre de coupe/décalage pour l'épaisseur d'outil • H décalage pour la hauteur de l'outil Des machines différentes peuvent utiliser le même code pour effectuer des fonctions différentes: même les machines qui utilisent le même contrôleur CNC. Certains ont déclaré que le G-code "Fanuc" est standard, ce qui est faux. C'est simplement l'un des plus simples et des plus répandus. Une version standardisée du G-code connue sous la dénomination BCL est utilisée, mais sur très peu de machines. Le G-code est interprété par les traceurs photographique Gerber , les contrôleurs de machine-outil et certains de leurs opérateurs. Les fichiers G-code sont produits par des programmes de CFAO tels que GOelan, SmartCAM, Gibbscam, Featurecam, Artcam, Edgecam, Surfcam, Mastercam, OneCNC, Router-CIM, Alphacam, TopSolid'Cam, e-NC etc. Ces applications utilisent en général des convertisseurs appelés post-processeurs pour optimiser le code en vue de son utilisation sur une machine particulière. Les post-processeurs sont généralement modifiables par l'utilisateur afin d'optimiser leur usage. Le G-code est aussi produit par certains programmes de CAO spécialisés dans la conception de circuit imprimé. De tels programmes doivent être adaptés pour chaque type de machine outil. Quelques machines CNC utilisent des programmes "Interactifs", qui permettent de programmer avec des Agents en cachant partiellement ou totalement le G-code. Quelques exemples populaires sont Mazak Mazatrol, Hurco Ultimax et le langage interactif Mori Seiki's CAPS.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 7/54 File: R&D-SW+MC\§T-expNC_Study.doc
3.2.4. Common Fanuc G Codes G00 Déplacement rapide G01 Interpolation linéaire G02 Interpolation circulaire (sens horaire) G03 Interpolation circulaire (sens anti-horaire) G04 Arrêt programme et ouverture carter (pour nettoyer) (temporisation - suivi de l'argument F ou X
en secondes) G10/G11 Écriture de données et Effacement de données G17 Sélection du plan X-Y G18 Sélection du plan X-Z G19 Sélection du plan Y-Z G20 Programmation en pouces G21 Programmation en mm G28 Retour à la position d'origine G31 Saute la fonction (utilisé pour les capteurs et les mesures de longueur d'outil) G33 Filetage à pas constant G34 Filetage à pas variable G40 Pas de compensation de rayon d'outil G41 Compensation de rayon d'outil à gauche G42 Compensation de rayon d'outil à droite G79 Saut de bloc G90 Déplacements en coordonnées absolues G91 Déplacements en coordonnées relatives G94/G95 Déplacement en mm/min et mm/tour G96/G97 Vitesse de coupe constante (vitesse de surface constante)/Vitesse de rotation constante ou
annulation de G96 3.2.5. Codes CNC ISO de base • M03, M04, M05 Broche sens horaire, sens antihoraire, arrêt
M21 Activation pression broche, M121 à M127 Palier pression selon outils M07, M08, M09 Mise en route arrosage / arrêt arrosage M02 Arrêt du programme M30 Fin du programme, réinitialisation. M99 Fin du sous-programme M00, M01 Arrêt du programme, arrêt optionnel ou avec condition
• G92 Vitesse de broche maximum G94, G95 Déplacement mm/min, déplacement mm/tour G96, G97: Vitesse de coupe constante, vitesse de rotation constante G00, G01 Mouvement rapide, interpolation linéaire (coupe suivant une ligne droite)
• F Vitesse de déplacement • S Vitesse de broche • Coordonnées d'axes X Y Z A B C

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 8/54 File: R&D-SW+MC\§T-expNC_Study.doc
3.2.6. Fonctions préparatoires G La fonction d'interpolation linéaire rapide G 0 (ou G0) (interpolation linéaire en mode rapide). La fonction d'interpolation linéaire à la vitesse programmée G 01 (ou G1) (interpolation linéaire en mode travail). La fonction d'interpolation circulaire G 02 (ou G2) (interpolation circulaire sens antitrigonométrique) et G 03 (ou G3) (interpolation circulaire sens trigonométrique). La fonction de temporisation (programmable avec F,X ou P) G 04 (ou G4). La fonction d'arrêt précis en fin de bloc G 09 (ou G9). Il est aussi possible sur certains pupitres de programmation d'utiliser ces deux codes (G2 G3) pour créer une interpolation circulaire, des fonctions d'interpolation à base de courbe nurbs G 06.2. Sur les fraiseuses équipées de tête birotative les codes G17,G18,G19 définissent l'axe des cycles de perçage, taraudage... et le plan dans lequel seront réalisées les interpolations circulaires et activé le correcteur de rayon d'outil. • G17 : Axe d'outil Z , interpolations G2,G3 et correction rayon dans le plan X Y. • G18 : Axe d'outil Y , interpolations G2,G3 et correction rayon dans le plan Z X. • G19 : Axe d'outil X , interpolations G2,G3 et correction rayon dans le plan Y Z. Les codes de la famille G52, G53, G54, G55...sont utilisés pour : • Programmer un décalage d'origine ; • Définir que les déplacements sont relatif à l'origine machine ; • Choisir le numéro de l'origine pièce. Certains codes G de la famille G60 G70 peuvent être utilisés par les fabricants de DNC pour : • Le choix de la programmation cartésienne ou polaire ; • L'activation d'un facteur d'échelle ; • La mise en action d'une fonction miroir ; • La programmation en mesure métrique ou en pouce. Les codes G90 G91définissent la programmation absolue ou incrémentale des cotes. Des cycles préprogrammés sont également accessibles sur la plupart des machines : G 81, 82, 83... Pour les cycles de perçage, taraudage, etc. avec l'annulation par G 80. D'autres cycles peuvent être présents selon le type de machine (tour "cycle d'ébauche G71,G72,G73...", fraiseuse, aléseuse, fil, ...). 3.2.7. Fonctions auxiliaires M Mise en rotation broche M3anti-horaire, M4 horaire. Arrêt par M5. Changement outil automatique ou manuel M6. Mise en route de l'arrosage N°1 M8. Arrêt par M9. Mise en route de l'arrosage N°2 M7 Arrêt par M9 Fonction de fin de programme M2 ou M30. Fonction d'arrêt programme M0. Fonction d'arrêt optionnel programme M1 Fonction d'activation d'axe angulaire en remplacement de broche tournage "M88-89" (selon commande) 3.2.8. Axes (référentiels) • Les axes X et Y sont disposés suivant un repère orthonormé direct par rapport à Z. L'axe X est celui qui
permet la plus grande distance de déplacement. Le dernier axe étant l'axe Y ; sur certaines machines, on trouve des axes supplémentaires appelés Axe A, B, C. Les axes A, B, C sont des axes rotatifs, A tournant autour de X, B autour de Y, C autour de Z.
• Mouvements de rotation A,B,C Le sens de rotation positif des axes A,B,C sont comptés en s'imaginant qu'une vis pas à droite, tournant dans le sens des aiguilles d'une montre avance en direction +X,+Y,+Z en se considérant à la place de l'outil. Si c'est un axe déplace la pièce au lieu de l'outil, on inverse le sens des axes, le positif devient négatif.
• On rencontre de plus les désignations U, V, W pour d'autres axes supplémentaires, portiques, tourelles secondaires ou accessoires.
• Le sens + permet un accroissement des dimensions de la pièce.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 9/54 File: R&D-SW+MC\§T-expNC_Study.doc
3.2.9. Origines (référentiels) • Origine programme (OP) : c'est le point origine du programme à partir duquel les mouvements de la
machine sont programmés. • Origine Machine (OM): Butée physique positionnée sur chaque axe du référentiel machine. L'origine
Machine est, malheureusement, souvent confondue avec l'origine mesure (ce qui est une particularité sur certaines machines mais n'est pas du tout une règle à retenir).Cette expression existe dans des manuels de constructeurs de machines-outils sans pour autant apporter de réponse, voire sans fondement. L'origine machine est une coordonnée mesure particulière. Lors de l’initialisation de l’axe ( dans le cas de capteurs relatifs) au passage du top zéro de la règle, le processus d’initialisation permet de forcer la valeur du registre du point courant par la valeur de l’axe dans le registre P16 (cas d’un DCN NUM). Cette valeur est souvent non nulle qui remet en cause la notion d’ « origine » d’une part, et « machine » d’autre part puis que c’est une coordonnée mesure particulière. Cette expression est sans fondement dans le cas de technologie de règle absolue, et sans fondement tout court.
• Origine mesure (Om) : L'origine mesure est propre à chaque axe asservi. Dans le cas d'une structure articulaire de type RRPPP (rotoïde, rotoïde, prismatique, prismatique, prismatique) il existe 5 origines mesures. Chaque axe mesure est constitué d'une origine et d'une dimension. La dimension de l'espace vectoriel de cette structure est de dimension 5. Suivant le type de technologie des capteurs permettant l'asservissement des axes, il est nécessaire de procédé à l'initialisation de la partie opérative avec la partie commande. Dans le cas de capteur relatif, les POM (Prise d'origines mesure) servent à établir les références de la mesure sur chaque axes des machines outils ne possédant pas de règles avec des capteurs absolus (détection du zéro du capteur de mesure).
Les origines mesures appartiennent à l'espace articulaire (espace de la structure cinématique de la machine en robotique). L'espace travail, ou de la tâche est celui où se trouve les autres éléments de la cellule élémentaire de production. La dimension vectorielle est 3. Il y a donc une endomorphisme d'espaces vectoriels entre l'espace articulaire de la machine et l'espace travail. Il est donc totalement inutile de représenter le zéro mesure comme un point concourant de tous les axes dans l'espace travail. C'est un sophisme. • Origine porte pièce (Opp) : C'est le point caractéristique de la liaison encastrement supposée parfaite entre
la machine et le porte-pièce. En tournage on le place souvent à l'intersection de la face avant du mandrin et de l'axe de la broche (axe Z, pour les mandrins qui ne sont pas changés régulièrement). En fraisage pour des raisons de standardisation on alèse des centreurs sur les tables des machines outils pour le situer plus facilement.
• Origine pièce (Op) : C'est le point d'intersection de l'isostatisme; ça situe la pièce par rapport au porte-pièce. • Distance origine programme (OP) - origine machine (OM) : c'est la distance que la machine doit additionner
pour passer de son origine (OM) à l'origine du programme (OP). • "DECALAGE" (dec) : distance vectorielle de l'origine porte-pièce (Opp) à l'origine programme (OP). • "PREF" (pref) : distance vectorielle de l'intersection des origines mesure de chaque axe qu'on appelle souvent
Origine mesure pour simplifié (Om) à l'origine porte-pièce. (POM ou OM) + PREF = OPP OPP + DECALAGE = OP En synthèse, les définitions des différentes origines sont issues d'un modèle de structure articulaire de machine constitué de liaisons prismatiques cartésiennes. Le modèle géométrique permettant de lier l'espace travail à l'espace articulaire est l'identité, amalgamant les origines mesures de la structure articulaire avec l'origine des solides dans l'espace travail. 3.2.10. Corrections (géométries et usures) Correction de la machine permettant de tenir compte des différentes longueurs et diamètres d'outil. • en fraisage : correcteur de longueur de fraise : Activé automatiquement lors du changement outil (M6). Sur
DNC FANUC G43, annulation par G49 ; Pour le correcteur de rayon de fraise: G41 et G42, annulation par G40. Sur certains DCN, le petit rayon de bout d'outil est compensable par un correcteur préfixé @.
• G41 positionne l'outil à gauche de la trajectoire programmée d'une valeur égale au rayon. • G42 positionne l'outil à droite de la trajectoire programmée d'une valeur égale au rayon. • en tournage : correcteur de longueur d'outil, correcteur en diamètre et compensation de rayon de bec: G41 et
G42, annulation par G40. La correction d'outils en cours d'usinage appelée "correction dynamique" permet de compenser l'usure de l'outil.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 10/54 File: R&D-SW+MC\§T-expNC_Study.doc
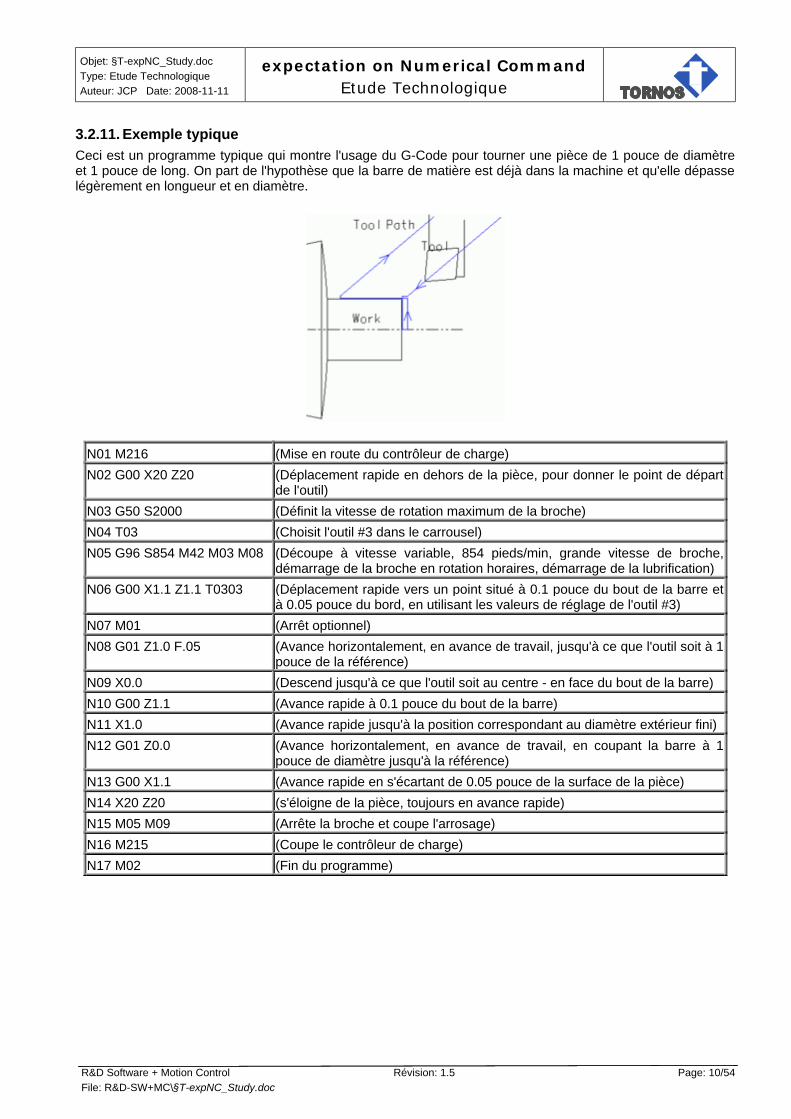
3.2.11. Exemple typique Ceci est un programme typique qui montre l'usage du G-Code pour tourner une pièce de 1 pouce de diamètre et 1 pouce de long. On part de l'hypothèse que la barre de matière est déjà dans la machine et qu'elle dépasse légèrement en longueur et en diamètre.
N01 M216 (Mise en route du contrôleur de charge) N02 G00 X20 Z20 (Déplacement rapide en dehors de la pièce, pour donner le point de départ
de l'outil) N03 G50 S2000 (Définit la vitesse de rotation maximum de la broche) N04 T03 (Choisit l'outil #3 dans le carrousel) N05 G96 S854 M42 M03 M08 (Découpe à vitesse variable, 854 pieds/min, grande vitesse de broche,
démarrage de la broche en rotation horaires, démarrage de la lubrification) N06 G00 X1.1 Z1.1 T0303 (Déplacement rapide vers un point situé à 0.1 pouce du bout de la barre et
à 0.05 pouce du bord, en utilisant les valeurs de réglage de l'outil #3) N07 M01 (Arrêt optionnel) N08 G01 Z1.0 F.05 (Avance horizontalement, en avance de travail, jusqu'à ce que l'outil soit à 1
pouce de la référence) N09 X0.0 (Descend jusqu'à ce que l'outil soit au centre - en face du bout de la barre) N10 G00 Z1.1 (Avance rapide à 0.1 pouce du bout de la barre) N11 X1.0 (Avance rapide jusqu'à la position correspondant au diamètre extérieur fini) N12 G01 Z0.0 (Avance horizontalement, en avance de travail, en coupant la barre à 1
pouce de diamètre jusqu'à la référence) N13 G00 X1.1 (Avance rapide en s'écartant de 0.05 pouce de la surface de la pièce) N14 X20 Z20 (s'éloigne de la pièce, toujours en avance rapide) N15 M05 M09 (Arrête la broche et coupe l'arrosage) N16 M215 (Coupe le contrôleur de charge) N17 M02 (Fin du programme)

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 11/54 File: R&D-SW+MC\§T-expNC_Study.doc
Remarques : • On peut développer un style de programmation, même sur un programme aussi court. Le groupement des
codes de la ligne N05 aurait pu être distribué sur plusieurs lignes. Ceci faciliterait le suivi pas à pas de l'exécution du programme.
• Beaucoup de codes sont "Modaux" ce qui veut dire qu'ils restent actifs tant que l'ordre n'a pas été annulé ou remplacé par un ordre contradictoire. Par exemple, après avoir choisi la vitesse de coupe variable (G97), elle reste active jusqu'à la fin du programme. En service, la vitesse de broche va augmenter au fur et à mesure que l'outil se rapproche du centre de manière à maintenir une vitesse de coupe constante. De la même manière, après avoir sélectionné la vitesse de déplacement rapide (G00) tous les mouvements seront rapides jusqu'à ce qu'une vitesse de déplacement (G01, G02, G03) soit sélectionnée.
• Il est d'usage courant d'avoir un contrôleur de charge/vitesse sur une machine à commande numérique. Ce contrôleur va arrêter la machine si la broche ou les vitesses de déplacement dépassent des valeurs prédéfinies lors du paramétrage de la machine. Le rôle du contrôleur de charge est d'éviter la casse machine en cas de bris d'outil ou d'erreur de programmation. De plus, dans une certaine mesure il peut donner une information sur un outil qui devient trop usé et nécessite un remplacement ou un réaffutage.
• Il est d'usage courant d'amener l'outil rapidement à un point "sûr" proche de la pièce - dans ce cas à 0,1 pouce - et ensuite de démarrer le déplacement lent de l'outil. La distance de sécurité requise dépend du savoir faire et de l'aisance du programmeur.
• Si le programme est faux, la probabilité d'un crash machine est élevée! Ceci peut être très coûteux. Il est possible de prévoir à intervalles réguliers des arrêts optionnels (code M01) qui permettent au programme d'être exécuté par séquences. Les arrêts optionnels restent dans le programme mais sont négligés lors d'une exécution normale. Heureusement, la plupart des programmes de CFAO sont livrés avec des simulateurs de déplacements affichant les mouvements lors de l'exécution du programme. Beaucoup de machines CNC modernes permettent aussi au programmeur d'exécuter une simulation et de vérifier les paramètres opératoires de la machine en tout point de l'exécution. Ceci permet au programmeur de découvrir des erreurs sémantiques (par opposition aux erreurs de syntaxe) avant de perdre des matériaux ou des outils avec un programme erroné.
3.2.12. Exemple d'un programme simple de tournage CNC % O1234 G50 S2000 G96 S300 M03 M6 T06D06 (OUTIL D'ÉBAUCHE DE TOURNAGE) G18 X37. Z0. G01 X-1. F0.2 Z1. G00 X30. G01 Z-20. X33. X35. Z-21. Z-25. X37. G00 X150. Z300. M01 M6 T0101 (PERCAGE 18MM) G97 S1000 G19 M03 X0. Z5. G01 Z-25. F100 G00 Z5. X150. Z300. M05 M30 %

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 12/54 File: R&D-SW+MC\§T-expNC_Study.doc
4. Principes En 1995, Tornos annonçait avoir réuni les avantages des tours à cames (rapidité, fiabilité et productivité) et ceux des machines à commandes numériques (souplesse, flexibilité et précision). La conjonction de trois composantes avait permis de réconcilier ces 2 générations d'avantages : • La commande numérique parallèle PNC-DECO
(ou cames virtuelles PTO aujourd'hui) • Le logiciel de programmation TB-DECO
(assistant programmation) • La cinématique adaptée
(3 outils simultanément dans la matière) Cette conjonction procurait: • convivialité, souplesse et rapidité d'utilisation • accessibilité aisée et rapide à tous les éléments • possibilité de travailler en tout temps avec 4 axes simultanés • optimisation des déplacements par gestion des vitesses d'approche • pré-calcul de l'usinage tenant compte de la dynamique des éléments machine Depuis lors, le monde de la commande numérique a évolué et bénéficié des progrès technologiques notamment en matière de processeurs embarqués, de capacité mémoire et de vitesse de traitement. Reste qu'indépendamment du langage utilisé pour programmer la pièce à décolleter, et du fait qu'entre le programmeur et la commande numérique, un logiciel d'édition sur PC soit généralement utilisé (assistant programmation), il existe diverses manières d'alimenter une commande numérique; ainsi, en plus de guider ou de mémoriser, le logiciel sur PC peut interpréter un dessin (2D ou 3D), contrôler la syntaxe, anticiper des collisions ou générer des codes mieux adaptés à la machine cible; ces codes mieux adaptés peuvent être de l'ISO customisé, de l'ISO segmenté, de l'ISO décomposé ou des tables de cames virtuelles. Par conséquent, une commande numérique peut générer des trajectoires en traitant des informations de différents types, autrement dit, elle peut être alimentée par des informations provenant de langages de natures diverses plus ou moins complexes à interpréter. En consultant le site http://www.tornos.ch/prd-ds-f.html, vous pourrez mesurer à à quel point l'amalgame est facile entre les instructions ISO et les tables de cames virtuelles appliquées aux commandes numériques. Voici les différentes façons de fournir les informations dont une commande numérique a besoin pour générer les trajectoires permettant d'usiner une pièce; puis d'analyser les avantages et les inconvénients de ces différents modes d'alimentation.
Interpolator
TB-DECOISO
NCPNC PTO

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 13/54 File: R&D-SW+MC\§T-expNC_Study.doc
4.1. Les Aliments digérables par une NC 4.1.1. Récapitulatif
ü
ü
ü
Equivalent
TB-D
EC
Orequis
Représentation Graphique
VectorielStandard
Vectoriel"métier"
Vectorielcurviligne
Vectoriellinéaire
Pointà Point
Types des donnéestraitées
ü
ü
Edition
Standard
Jeu standard des codes G et Mselon la norme ISO-6983 décrivant des trajectoires
ISOStandard
Extension du jeu d’instruction gérant des trajectoires (cycles) plus ˝métier˝ avec "Synchro.˝
ISOCustomisé
Echantillonnage en segments linéaires et curvilignes;instructions ISO "G1,G2,G3"
ISOSegmenté
Echantillonnage en segments linéaires (facettisation);instructions ISO "G1 X... F..."
ISODécomposé
Echantillonnage temporel des trajectoires en tables positions axes et vitesses broches
Tables PTO
Description etexplications succinctes
ContrôleNumérique
ü
ü
ü
Equivalent
TB-D
EC
Orequis
Représentation Graphique
VectorielStandard
Vectoriel"métier"
Vectorielcurviligne
Vectoriellinéaire
Pointà Point
Types des donnéestraitées
ü
ü
Edition
Standard
Jeu standard des codes G et Mselon la norme ISO-6983 décrivant des trajectoires
ISOStandard
Extension du jeu d’instruction gérant des trajectoires (cycles) plus ˝métier˝ avec "Synchro.˝
ISOCustomisé
Echantillonnage en segments linéaires et curvilignes;instructions ISO "G1,G2,G3"
ISOSegmenté
Echantillonnage en segments linéaires (facettisation);instructions ISO "G1 X... F..."
ISODécomposé
Echantillonnage temporel des trajectoires en tables positions axes et vitesses broches
Tables PTO
Description etexplications succinctes
ContrôleNumérique
4.1.2. Capabilité vs Complexité
Arch
itect
ure T
B-DE
CO
Cap
ab
ilit
é
DECOISO
SynchronismesMacros
Notion de cames électroniquesSans contraintes canaux ISO
Optimisation énergétique
ISO StandardFanuc-Mitsubishi-Siemens
ISO Segmenté
ISODécomposé
P TO
ISO Customisé
canaux ISO limitatifsJeu de codes réduit
Flexibilité
•Précalculation gérant aussi la vitesse des trajectoires et les collisions dynamiques⇒ Simulation 3D dynamique, Gantt précis
•Précalculation limitée à la géométrie des trajectoires et donc aux collisions statiques⇒ Simulation 3D statique, Gantt grossier
•Extension "métier" recourant à denombreuses options fonctionnelles NC⇒ Programmation et mise-en-train rapide
•Langage universel ISO 6983⇒ Compatible FAO et large audience
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 14/54 File: R&D-SW+MC\§T-expNC_Study.doc
4.2. ISO ou PTO ? 4.2.1. Commandes ISO interprétées
Par définition, une commande numérique standard est capable d'interpréter un programme contenant des instructions ISO standard. La fonction préalable à la gestion de la trajectoire de l'outil passe par l'interprétation, cela signifie que chaque ligne de commande ISO est interprétée successivement autorisant ainsi un mode "pas-à-pas" ou "bloc-à-bloc", un mode arrêt/reprise bien utile lorsqu'il s'agit de changer d'outil au sein d'un cycle ou des corrections de trajectoires mineures pendant la mise en train ou la production. Une fois l'instruction en cours interprétée, elle est compilée, c'est à dire traduite en une suite de consignes de positions et/ou de vitesses interpolées qui sont alors transmises aux servo-moteurs concernés. La commande numérique continue de garantir l'interpolation en temps réel par rétroaction (asservissement d'interpolation) durant toute l'exécution de l'instruction avant de passer à l'instruction suivante. Avec les progrès de l'informatique en matière de traitement, les commandes numériques du marché, ont toutes adopté une stratégie de pré-compilation des instructions réduisant à néant les temps morts lors du passage d'une instruction à une autre.
Autrement dit, dans ce paradigme, la commande numérique fonctionne à la manière d'un homme-orchestre réinterprétant en permanence une partition de musique décrivant les notes à exécuter de manière synchrone sur plusieurs instruments. Avantages: • interpolation asservie en temps réel par rétroaction de positions et/ou de vitesses • simple et convivial pour l'utilisateur si la cinématique est simple et conviviale • arrêt /reprise de programme facile (ex: changement d'outil) • transfert instantané de la programmation à la commande • ajustements en mise-en-train directs, efficaces et précis • corrections durant la production aisées • volume réduit de données

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 15/54 File: R&D-SW+MC\§T-expNC_Study.doc
4.2.2. Cames virtuelles PTO pré-calculées La pré-calculation induit la notion de "compilateur de trajectoires"; contrairement à l'approche précédente où la commande numérique ne compile que les dernières instructions, ici, la commande numérique doit interpréter toutes les instructions et les compiler toutes. Cette manière de procéder induit nécessairement un traitement "hors-ligne" doublé d'une prise en compte d'un modèle dynamique des éléments de machines. Cette compilation en cames virtuelles se traduit en collection de suites de consignes de positions et/ou de vitesses pour tous les servo-moteurs d'une machine. La commande numérique se contente ensuite de garantir la cadence du déroulement des suites de consignes et/ou de vitesses envoyées aux servo-moteurs concernés. La notion de rétroaction (asservissement d'interpolation) n'existe pas dans ce paradigme, c'est le modèle dynamique des éléments de machines qui doit contenir suffisamment d'informations pertinentes pour permettre au compilateur de prévoir avec suffisamment de précision où et quand seront positionnés les éléments machine. Pré-calculer, c'est comme prévoir la météo, il faut un modèle dont la complexité est exponentiellement proportionnelle à la précision visée pour émettre des prévisions de positions ou de vitesses correctes.
L'amélioration d'un processus passe forcément par une meilleure proximité avec les actuateurs en charge de ce processus; par conséquent, la pré-calculation ne permet pas de tirer le meilleur des actuateurs d'une machine. Cela induit forcément un nivellement des performances par le bas en tenant compte du modèle dynamique le moins risqué pour une série de machines données. Autrement dit, dans ce paradigme, la commande numérique fonctionne à la manière d'un colporteur égayant musicalement l'atmosphère en déroulant un rouleau de papier perforé sur lequel est inscrit l'équivalent d'un morceau de musique; les successions de trous orientent l'air (le vent) vers les tuyaux de longueurs émettant diverses notes afin de reproduire la mélodie pré-perforée. Avantages: • simulation 3D plus proche de la réalité dynamique permettant une meilleure détection de collision • pré-calcul de l'usinage en tenant compte de la dynamique des éléments machine • suppression des temps improductifs (interprétation/compilation entre instructions) • prévision du temps de cycle précis programme entier et par opération • gestion des avances et combinaisons d'axes illimitées • pas de limitation en synchronisation et verrouillage • simulation dynamique des trajectoires • tous les axes simultanés • optimisation énergétique
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 16/54 File: R&D-SW+MC\§T-expNC_Study.doc
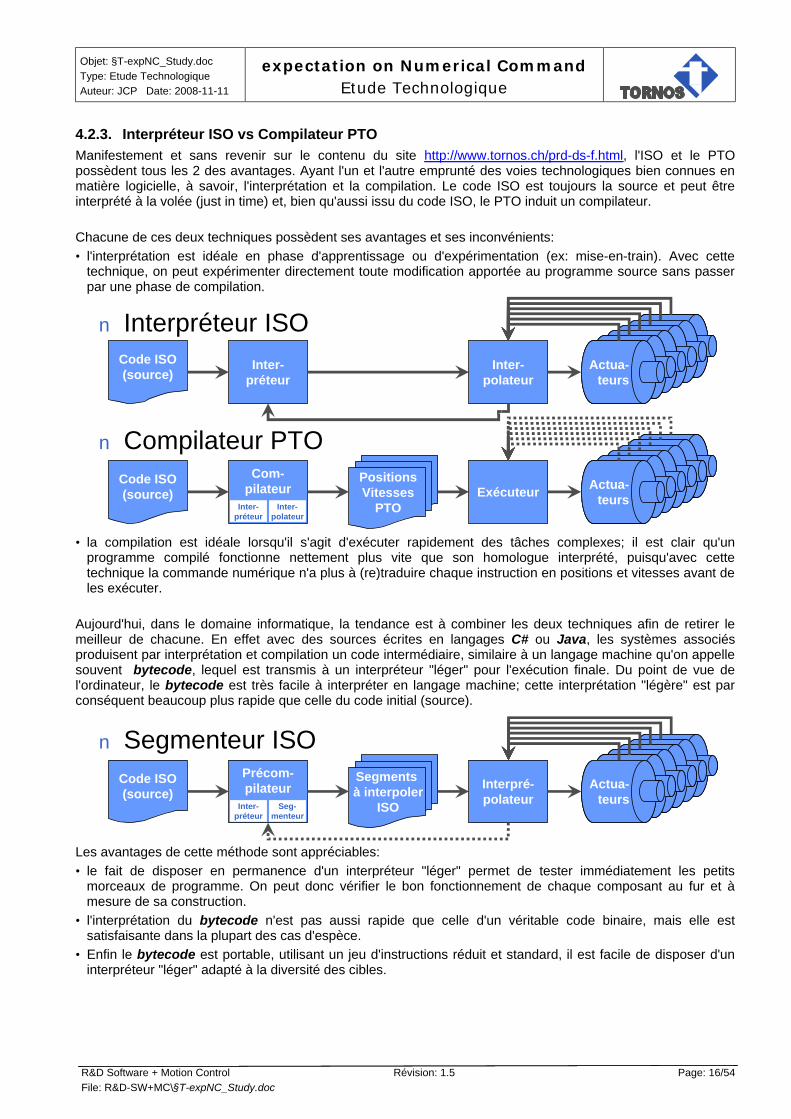
4.2.3. Interpréteur ISO vs Compilateur PTO Manifestement et sans revenir sur le contenu du site http://www.tornos.ch/prd-ds-f.html, l'ISO et le PTO possèdent tous les 2 des avantages. Ayant l'un et l'autre emprunté des voies technologiques bien connues en matière logicielle, à savoir, l'interprétation et la compilation. Le code ISO est toujours la source et peut être interprété à la volée (just in time) et, bien qu'aussi issu du code ISO, le PTO induit un compilateur. Chacune de ces deux techniques possèdent ses avantages et ses inconvénients: • l'interprétation est idéale en phase d'apprentissage ou d'expérimentation (ex: mise-en-train). Avec cette
technique, on peut expérimenter directement toute modification apportée au programme source sans passer par une phase de compilation.
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
n Interpréteur ISO
n Compilateur PTO
Code ISO(source)
Inter-préteur
Inter-polateur
Code ISO(source)
PositionsVitesses
PTO
Com-pilateur Exécuteur
Inter-préteur
Inter-polateur
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
• la compilation est idéale lorsqu'il s'agit d'exécuter rapidement des tâches complexes; il est clair qu'un
programme compilé fonctionne nettement plus vite que son homologue interprété, puisqu'avec cette technique la commande numérique n'a plus à (re)traduire chaque instruction en positions et vitesses avant de les exécuter.
Aujourd'hui, dans le domaine informatique, la tendance est à combiner les deux techniques afin de retirer le meilleur de chacune. En effet avec des sources écrites en langages C# ou Java, les systèmes associés produisent par interprétation et compilation un code intermédiaire, similaire à un langage machine qu'on appelle souvent bytecode, lequel est transmis à un interpréteur "léger" pour l'exécution finale. Du point de vue de l'ordinateur, le bytecode est très facile à interpréter en langage machine; cette interprétation "légère" est par conséquent beaucoup plus rapide que celle du code initial (source).
n Segmenteur ISOCode ISO(source)
Segments à interpoler
ISO
Précom-pilateur Interpré-
polateurInter-préteur
Seg-menteur
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Les avantages de cette méthode sont appréciables: • le fait de disposer en permanence d'un interpréteur "léger" permet de tester immédiatement les petits
morceaux de programme. On peut donc vérifier le bon fonctionnement de chaque composant au fur et à mesure de sa construction.
• l'interprétation du bytecode n'est pas aussi rapide que celle d'un véritable code binaire, mais elle est satisfaisante dans la plupart des cas d'espèce.
• Enfin le bytecode est portable, utilisant un jeu d'instructions réduit et standard, il est facile de disposer d'un interpréteur "léger" adapté à la diversité des cibles.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 17/54 File: R&D-SW+MC\§T-expNC_Study.doc
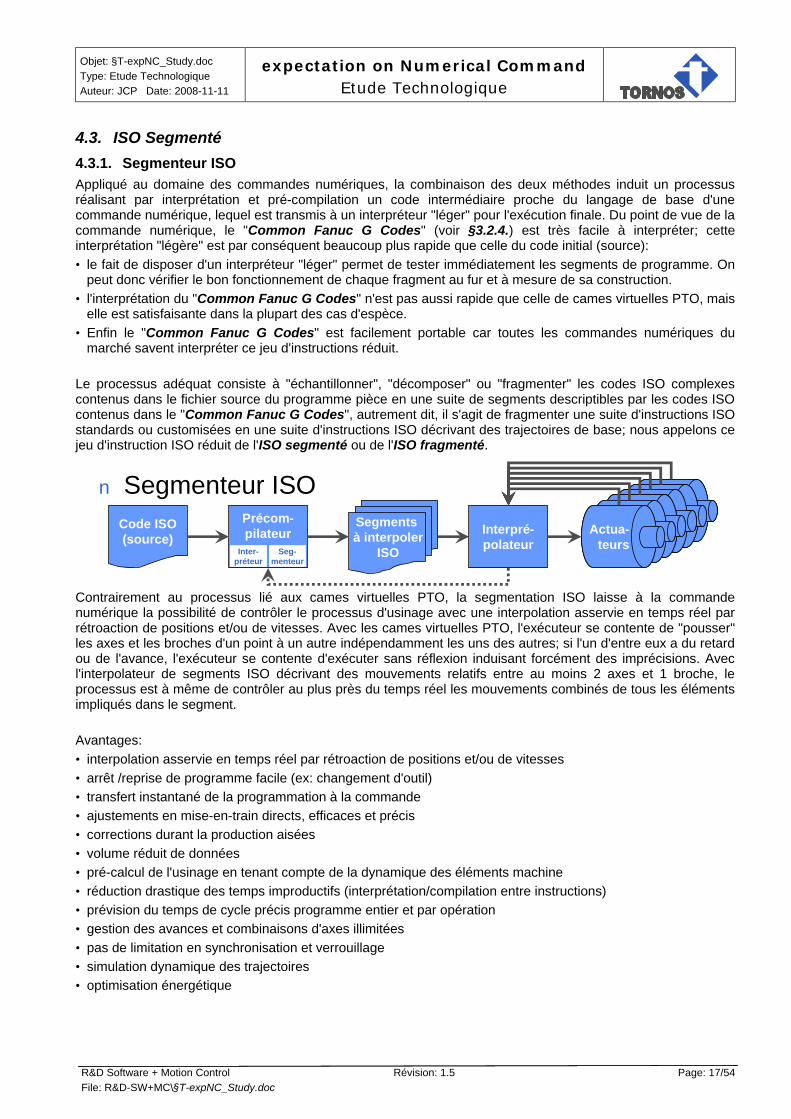
4.3. ISO Segmenté 4.3.1. Segmenteur ISO Appliqué au domaine des commandes numériques, la combinaison des deux méthodes induit un processus réalisant par interprétation et pré-compilation un code intermédiaire proche du langage de base d'une commande numérique, lequel est transmis à un interpréteur "léger" pour l'exécution finale. Du point de vue de la commande numérique, le "Common Fanuc G Codes" (voir §3.2.4.) est très facile à interpréter; cette interprétation "légère" est par conséquent beaucoup plus rapide que celle du code initial (source): • le fait de disposer d'un interpréteur "léger" permet de tester immédiatement les segments de programme. On
peut donc vérifier le bon fonctionnement de chaque fragment au fur et à mesure de sa construction. • l'interprétation du "Common Fanuc G Codes" n'est pas aussi rapide que celle de cames virtuelles PTO, mais
elle est satisfaisante dans la plupart des cas d'espèce. • Enfin le "Common Fanuc G Codes" est facilement portable car toutes les commandes numériques du
marché savent interpréter ce jeu d'instructions réduit. Le processus adéquat consiste à "échantillonner", "décomposer" ou "fragmenter" les codes ISO complexes contenus dans le fichier source du programme pièce en une suite de segments descriptibles par les codes ISO contenus dans le "Common Fanuc G Codes", autrement dit, il s'agit de fragmenter une suite d'instructions ISO standards ou customisées en une suite d'instructions ISO décrivant des trajectoires de base; nous appelons ce jeu d'instruction ISO réduit de l'ISO segmenté ou de l'ISO fragmenté.
n Segmenteur ISOCode ISO(source)
Segments à interpoler
ISO
Précom-pilateur Interpré-
polateurInter-préteur
Seg-menteur
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Contrairement au processus lié aux cames virtuelles PTO, la segmentation ISO laisse à la commande numérique la possibilité de contrôler le processus d'usinage avec une interpolation asservie en temps réel par rétroaction de positions et/ou de vitesses. Avec les cames virtuelles PTO, l'exécuteur se contente de "pousser" les axes et les broches d'un point à un autre indépendamment les uns des autres; si l'un d'entre eux a du retard ou de l'avance, l'exécuteur se contente d'exécuter sans réflexion induisant forcément des imprécisions. Avec l'interpolateur de segments ISO décrivant des mouvements relatifs entre au moins 2 axes et 1 broche, le processus est à même de contrôler au plus près du temps réel les mouvements combinés de tous les éléments impliqués dans le segment. Avantages: • interpolation asservie en temps réel par rétroaction de positions et/ou de vitesses • arrêt /reprise de programme facile (ex: changement d'outil) • transfert instantané de la programmation à la commande • ajustements en mise-en-train directs, efficaces et précis • corrections durant la production aisées • volume réduit de données • pré-calcul de l'usinage en tenant compte de la dynamique des éléments machine • réduction drastique des temps improductifs (interprétation/compilation entre instructions) • prévision du temps de cycle précis programme entier et par opération • gestion des avances et combinaisons d'axes illimitées • pas de limitation en synchronisation et verrouillage • simulation dynamique des trajectoires • optimisation énergétique
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 18/54 File: R&D-SW+MC\§T-expNC_Study.doc
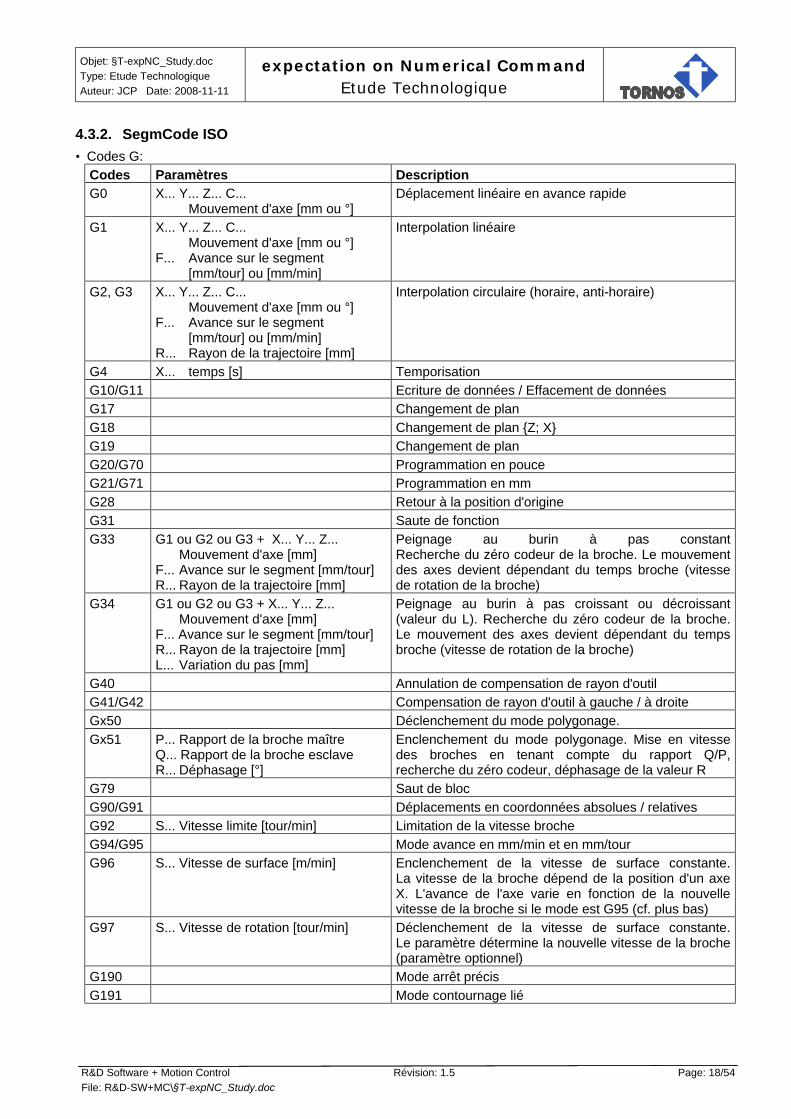
4.3.2. SegmCode ISO • Codes G:
Codes Paramètres Description G0 X... Y... Z... C...
Mouvement d'axe [mm ou °] Déplacement linéaire en avance rapide
G1 X... Y... Z... C... Mouvement d'axe [mm ou °] F... Avance sur le segment [mm/tour] ou [mm/min]
Interpolation linéaire
G2, G3 X... Y... Z... C... Mouvement d'axe [mm ou °] F... Avance sur le segment [mm/tour] ou [mm/min] R... Rayon de la trajectoire [mm]
Interpolation circulaire (horaire, anti-horaire)
G4 X... temps [s] Temporisation G10/G11 Ecriture de données / Effacement de données G17 Changement de plan G18 Changement de plan {Z; X} G19 Changement de plan G20/G70 Programmation en pouce G21/G71 Programmation en mm G28 Retour à la position d'origine G31 Saute de fonction G33 G1 ou G2 ou G3 + X... Y... Z...
Mouvement d'axe [mm] F... Avance sur le segment [mm/tour] R... Rayon de la trajectoire [mm]
Peignage au burin à pas constant Recherche du zéro codeur de la broche. Le mouvement des axes devient dépendant du temps broche (vitesse de rotation de la broche)
G34 G1 ou G2 ou G3 + X... Y... Z... Mouvement d'axe [mm] F... Avance sur le segment [mm/tour] R... Rayon de la trajectoire [mm] L... Variation du pas [mm]
Peignage au burin à pas croissant ou décroissant (valeur du L). Recherche du zéro codeur de la broche. Le mouvement des axes devient dépendant du temps broche (vitesse de rotation de la broche)
G40 Annulation de compensation de rayon d'outil G41/G42 Compensation de rayon d'outil à gauche / à droite Gx50 Déclenchement du mode polygonage. Gx51 P... Rapport de la broche maître
Q... Rapport de la broche esclave R... Déphasage [°]
Enclenchement du mode polygonage. Mise en vitesse des broches en tenant compte du rapport Q/P, recherche du zéro codeur, déphasage de la valeur R
G79 Saut de bloc G90/G91 Déplacements en coordonnées absolues / relatives G92 S... Vitesse limite [tour/min] Limitation de la vitesse broche G94/G95 Mode avance en mm/min et en mm/tour G96 S... Vitesse de surface [m/min] Enclenchement de la vitesse de surface constante.
La vitesse de la broche dépend de la position d'un axe X. L'avance de l'axe varie en fonction de la nouvelle vitesse de la broche si le mode est G95 (cf. plus bas)
G97 S... Vitesse de rotation [tour/min] Déclenchement de la vitesse de surface constante. Le paramètre détermine la nouvelle vitesse de la broche (paramètre optionnel)
G190 Mode arrêt précis G191 Mode contournage lié
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 19/54 File: R&D-SW+MC\§T-expNC_Study.doc
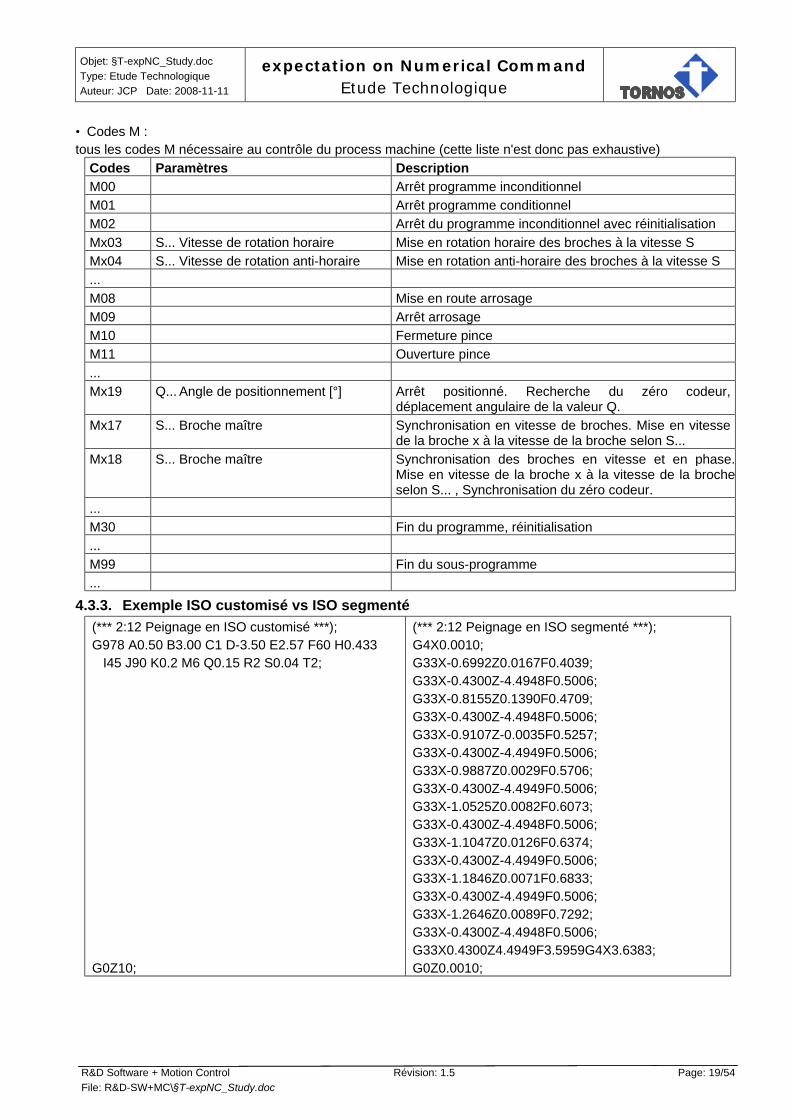
• Codes M : tous les codes M nécessaire au contrôle du process machine (cette liste n'est donc pas exhaustive)
Codes Paramètres Description M00 Arrêt programme inconditionnel M01 Arrêt programme conditionnel M02 Arrêt du programme inconditionnel avec réinitialisation Mx03 S... Vitesse de rotation horaire Mise en rotation horaire des broches à la vitesse S Mx04 S... Vitesse de rotation anti-horaire Mise en rotation anti-horaire des broches à la vitesse S ... M08 Mise en route arrosage M09 Arrêt arrosage M10 Fermeture pince M11 Ouverture pince ... Mx19 Q... Angle de positionnement [°] Arrêt positionné. Recherche du zéro codeur,
déplacement angulaire de la valeur Q. Mx17 S... Broche maître Synchronisation en vitesse de broches. Mise en vitesse
de la broche x à la vitesse de la broche selon S... Mx18 S... Broche maître Synchronisation des broches en vitesse et en phase.
Mise en vitesse de la broche x à la vitesse de la broche selon S... , Synchronisation du zéro codeur.
... M30 Fin du programme, réinitialisation ... M99 Fin du sous-programme ...
4.3.3. Exemple ISO customisé vs ISO segmenté (*** 2:12 Peignage en ISO customisé ***); G978 A0.50 B3.00 C1 D-3.50 E2.57 F60 H0.433 I45 J90 K0.2 M6 Q0.15 R2 S0.04 T2; G0Z10;
(*** 2:12 Peignage en ISO segmenté ***); G4X0.0010; G33X-0.6992Z0.0167F0.4039; G33X-0.4300Z-4.4948F0.5006; G33X-0.8155Z0.1390F0.4709; G33X-0.4300Z-4.4948F0.5006; G33X-0.9107Z-0.0035F0.5257; G33X-0.4300Z-4.4949F0.5006; G33X-0.9887Z0.0029F0.5706; G33X-0.4300Z-4.4949F0.5006; G33X-1.0525Z0.0082F0.6073; G33X-0.4300Z-4.4948F0.5006; G33X-1.1047Z0.0126F0.6374; G33X-0.4300Z-4.4949F0.5006; G33X-1.1846Z0.0071F0.6833; G33X-0.4300Z-4.4949F0.5006; G33X-1.2646Z0.0089F0.7292; G33X-0.4300Z-4.4948F0.5006; G33X0.4300Z4.4949F3.5959G4X3.6383; G0Z0.0010;

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 20/54 File: R&D-SW+MC\§T-expNC_Study.doc
4.3.4. Compilateur PTO vs Segmenteur ISO Le concept lié au compilateur PTO ne peut pas garantir par essence la qualité du processus d'usinage par le fait qu'il ne tient pas compte de la réalité des trajectoires en temps réel; l'exécuteur exécute sans réflexion ! Pré-calculer, c'est comme prévoir la météo, il faut un modèle dont la complexité est exponentiellement proportionnelle à la précision visée pour émettre des prévisions de positions ou de vitesses correctes. De plus ce système induit une conception extrêmement centralisée, fondamentalement inapte à une distribution et à une répartition des traitements nécessaires, notamment en matière de sécurité tant produit qu'utilisateur. La taille des tables des cames virtuelles PTO est directement proportionnelle à la période d'échantillonnage choisie (8ms aujourd'hui, 1ms demain, ...); l'amélioration qualitative en pâtira toujours.
n Compilateur PTO
n Segmenteur ISO
Code ISO(source)
PositionsVitesses
PTO
Com-pilateur Exécuteur
Inter-préteur
Inter-polateur
Code ISO(source)
Segments à interpoler
ISO
Précom-pilateur Interpré-
polateurInter-préteur
Seg-menteur
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Du fait de périodes d'échantillonnage inférieures à 30µs, le concept lié au segmenteur ISO pallie à toutes les faiblesses du compilateur PTO mais induit qu'un processeur central doit traiter en temps réel toutes les informations nécessaires à tous les axes d'une machine alors que la précision n'intervient qu'entre certains éléments; c'est encore aujourd'hui une gageure au-delà de 7 boucles d'asservissement (i.e. Heidenhain). Par contre, "distribuer" la fonctionnalité d'interpolation au niveau des groupes d'éléments devant interagir de manière extrêmement concertés afin d'assurer le meilleur processus d'usinage et la meilleure sécurité constituerait à n'en pas douter une solution intéressante.
n Segmenteur ISO distribuéCode ISO(source)
Précom-pilateur
Interpré-polateurdistribué
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teursInter-
préteurSeg-
menteur
Segments à interpoler
ISO
Segments à interpoler
ISO
Segments à interpoler
ISO
Interpré-polateurdistribué
Interpré-polateurdistribué
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Actua-teurs
Ces interpolateurs distribués n'interpréteraient que de l'ISO segmenté et les périodes d'échantillonnage descendraient facilement vers la 1µs en bridant le nombre de boucle de rétroaction (i.e. les 7 d'Heidenhain). Ces interpolateurs distribués permettraient aussi de tirer profit des développements dans le domaine des centres d'usinage 5 axes.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 21/54 File: R&D-SW+MC\§T-expNC_Study.doc
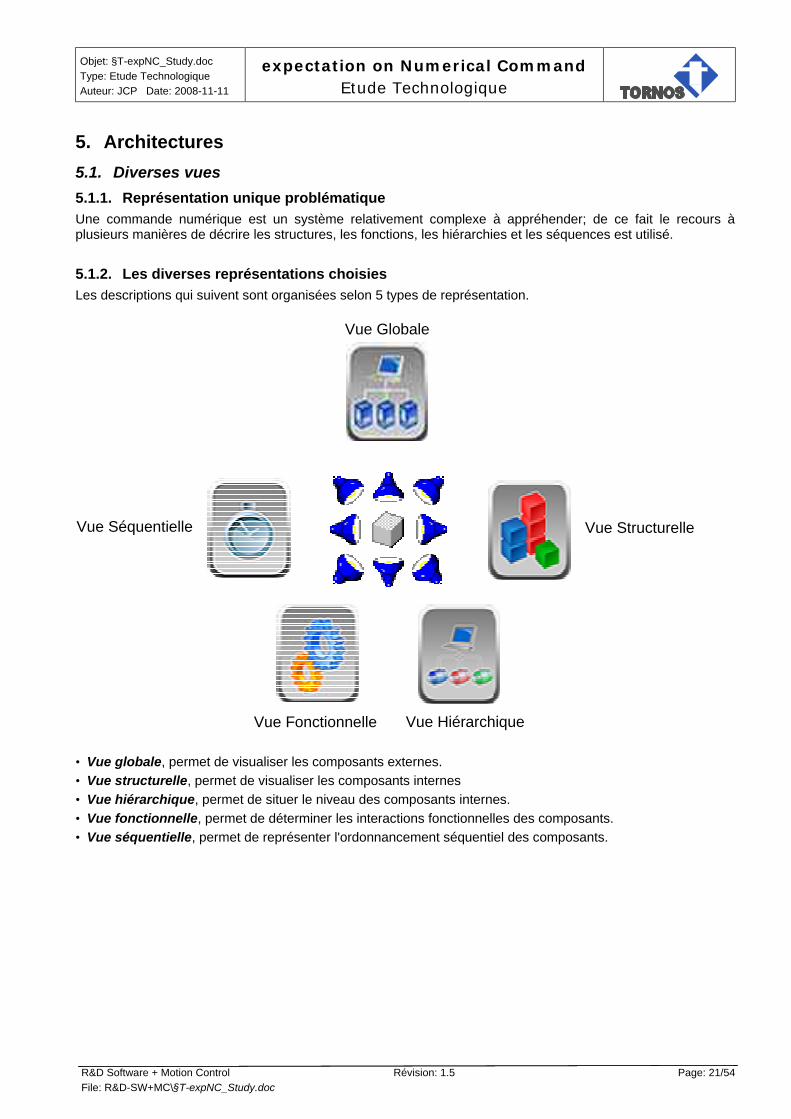
5. Architectures 5.1. Diverses vues 5.1.1. Représentation unique problématique Une commande numérique est un système relativement complexe à appréhender; de ce fait le recours à plusieurs manières de décrire les structures, les fonctions, les hiérarchies et les séquences est utilisé. 5.1.2. Les diverses représentations choisies Les descriptions qui suivent sont organisées selon 5 types de représentation.
Vue Hiérarchique
Vue Structurelle
Vue Fonctionnelle
Vue Séquentielle
Vue Globale
• Vue globale, permet de visualiser les composants externes. • Vue structurelle, permet de visualiser les composants internes • Vue hiérarchique, permet de situer le niveau des composants internes. • Vue fonctionnelle, permet de déterminer les interactions fonctionnelles des composants. • Vue séquentielle, permet de représenter l'ordonnancement séquentiel des composants.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 22/54 File: R&D-SW+MC\§T-expNC_Study.doc
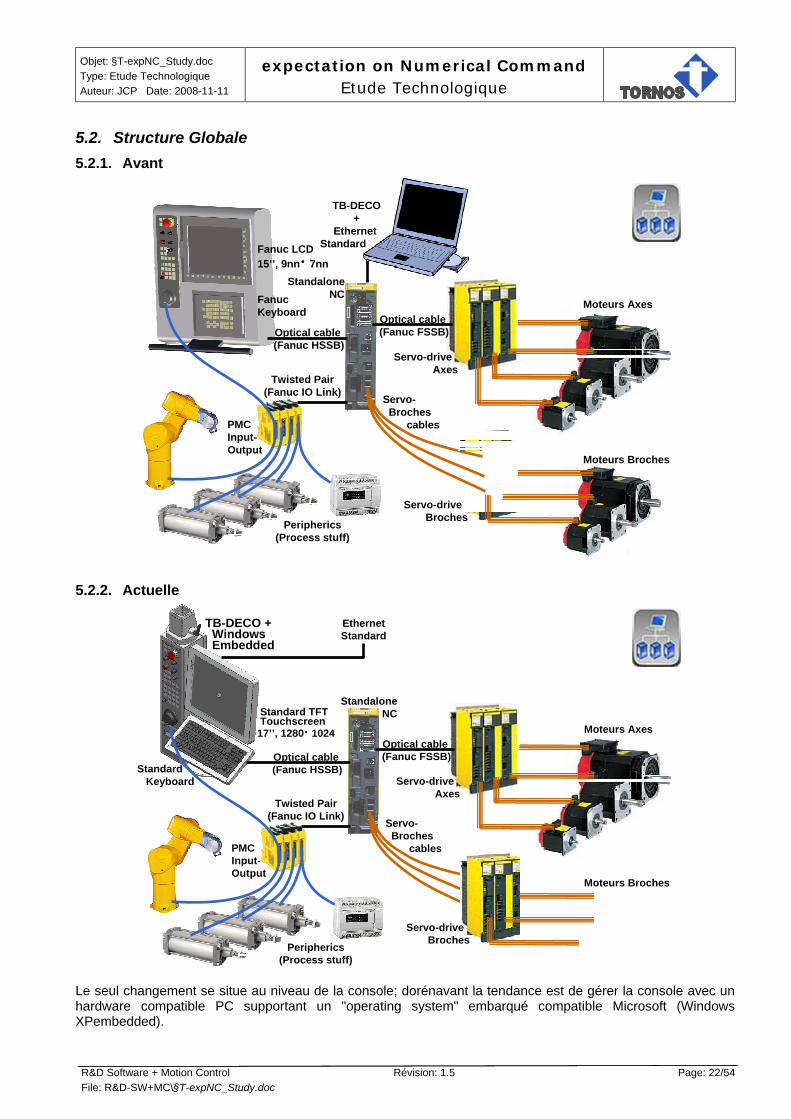
5.2. Structure Globale 5.2.1. Avant
Optical cable(Fanuc FSSB)
ME
MO
RY C
ARD
JA41
JA41
JA41
JA41
JA41
ETH
ER
NET
CP1 CP2
CO
P1LE
D1
SWIT
CH
LED
2PS
W
SLOT1
SLOT2
ME
MO
RY C
ARD
JA41
JA41
JA41
JA41
JA41
ETH
ER
NET
CP1 CP2
CO
P1LE
D1
SWIT
CH
LED
2PS
W
SLOT1
SLOT2
Twisted Pair(Fanuc IO Link)
StandaloneNC
PMCInput-Output
Servo-drive Axes
Optical cable(Fanuc HSSB)
Servo-Broches
cables
Servo-drive Broches
Moteurs Broches
Moteurs Axes
Fanuc LCD15’’, 9nn×7nn
FanucKeyboard
Peripherics(Process stuff)
TB-DECO+
EthernetStandard
5.2.2. Actuelle
Optical cable(Fanuc FSSB)
ME
MO
RY
CA
RD
JA41
JA41
JA41
JA41
JA41
ETHE
RNE
T
CP1 CP2
CO
P1LE
D1
SW
ITC
HLE
D2
PSW
SLOT1
SLOT2
ME
MO
RY
CA
RD
JA41
JA41
JA41
JA41
JA41
ETHE
RNE
T
CP1 CP2
CO
P1LE
D1
SW
ITC
HLE
D2
PSW
SLOT1
SLOT2
Twisted Pair(Fanuc IO Link)
StandaloneNC
PMCInput-Output
Servo-drive Axes
Optical cable(Fanuc HSSB)
Servo-Broches
cables
Servo-drive Broches
Moteurs Broches
Moteurs AxesStandard TFTTouchscreen
17’’, 1280×1024
StandardKeyboard
TB-DECO +WindowsEmbedded
Peripherics(Process stuff)
EthernetStandard
Le seul changement se situe au niveau de la console; dorénavant la tendance est de gérer la console avec un hardware compatible PC supportant un "operating system" embarqué compatible Microsoft (Windows XPembedded).
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 23/54 File: R&D-SW+MC\§T-expNC_Study.doc
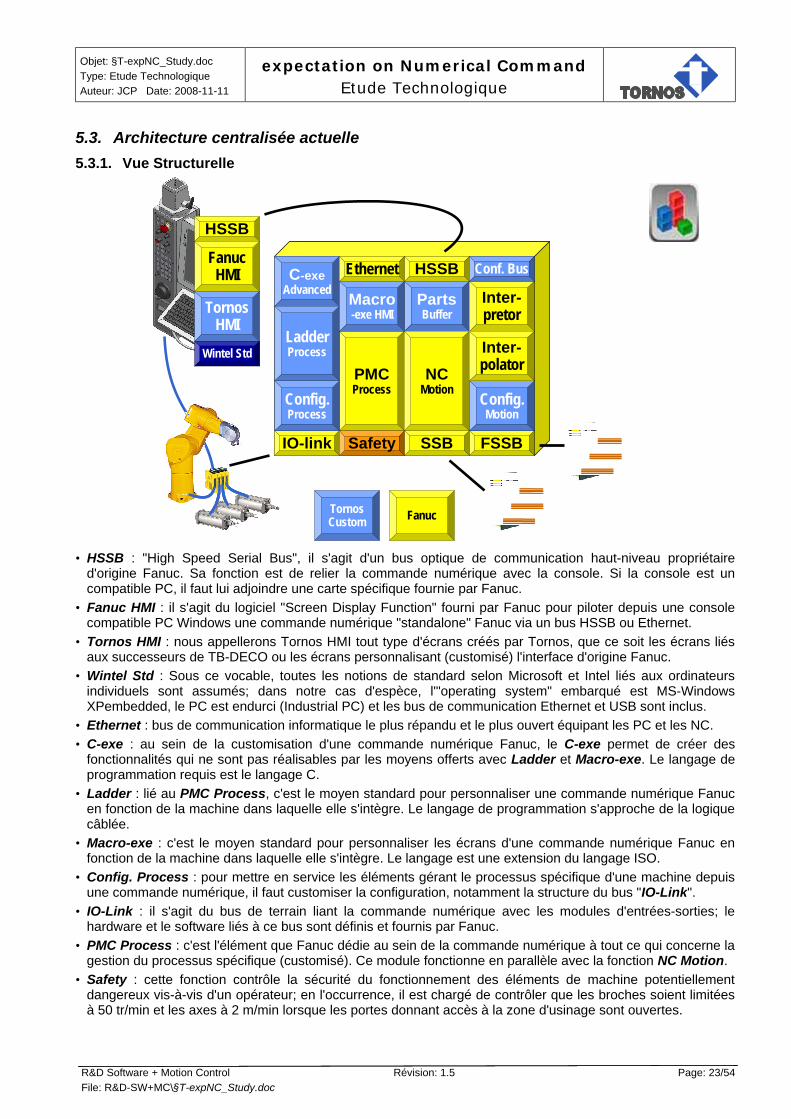
5.3. Architecture centralisée actuelle 5.3.1. Vue Structurelle
PMCProcess
C-exeAdvanced
HSSB
FSSBSSBIO-link
Ethernet
PartsBuffer
Config.Process
LadderProcess
Config.Motion
NCMotion
Safety
Inter-pretor
Inter-polator
Macro-exe HMI
FanucTornosCustom
HSSB
FanucHMI
TornosHMI
Conf. Bus
Wintel Std
• HSSB : "High Speed Serial Bus", il s'agit d'un bus optique de communication haut-niveau propriétaire
d'origine Fanuc. Sa fonction est de relier la commande numérique avec la console. Si la console est un compatible PC, il faut lui adjoindre une carte spécifique fournie par Fanuc.
• Fanuc HMI : il s'agit du logiciel "Screen Display Function" fourni par Fanuc pour piloter depuis une console compatible PC Windows une commande numérique "standalone" Fanuc via un bus HSSB ou Ethernet.
• Tornos HMI : nous appellerons Tornos HMI tout type d'écrans créés par Tornos, que ce soit les écrans liés aux successeurs de TB-DECO ou les écrans personnalisant (customisé) l'interface d'origine Fanuc.
• Wintel Std : Sous ce vocable, toutes les notions de standard selon Microsoft et Intel liés aux ordinateurs individuels sont assumés; dans notre cas d'espèce, l'"operating system" embarqué est MS-Windows XPembedded, le PC est endurci (Industrial PC) et les bus de communication Ethernet et USB sont inclus.
• Ethernet : bus de communication informatique le plus répandu et le plus ouvert équipant les PC et les NC. • C-exe : au sein de la customisation d'une commande numérique Fanuc, le C-exe permet de créer des
fonctionnalités qui ne sont pas réalisables par les moyens offerts avec Ladder et Macro-exe. Le langage de programmation requis est le langage C.
• Ladder : lié au PMC Process, c'est le moyen standard pour personnaliser une commande numérique Fanuc en fonction de la machine dans laquelle elle s'intègre. Le langage de programmation s'approche de la logique câblée.
• Macro-exe : c'est le moyen standard pour personnaliser les écrans d'une commande numérique Fanuc en fonction de la machine dans laquelle elle s'intègre. Le langage est une extension du langage ISO.
• Config. Process : pour mettre en service les éléments gérant le processus spécifique d'une machine depuis une commande numérique, il faut customiser la configuration, notamment la structure du bus "IO-Link".
• IO-Link : il s'agit du bus de terrain liant la commande numérique avec les modules d'entrées-sorties; le hardware et le software liés à ce bus sont définis et fournis par Fanuc.
• PMC Process : c'est l'élément que Fanuc dédie au sein de la commande numérique à tout ce qui concerne la gestion du processus spécifique (customisé). Ce module fonctionne en parallèle avec la fonction NC Motion.
• Safety : cette fonction contrôle la sécurité du fonctionnement des éléments de machine potentiellement dangereux vis-à-vis d'un opérateur; en l'occurrence, il est chargé de contrôler que les broches soient limitées à 50 tr/min et les axes à 2 m/min lorsque les portes donnant accès à la zone d'usinage sont ouvertes.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 24/54 File: R&D-SW+MC\§T-expNC_Study.doc
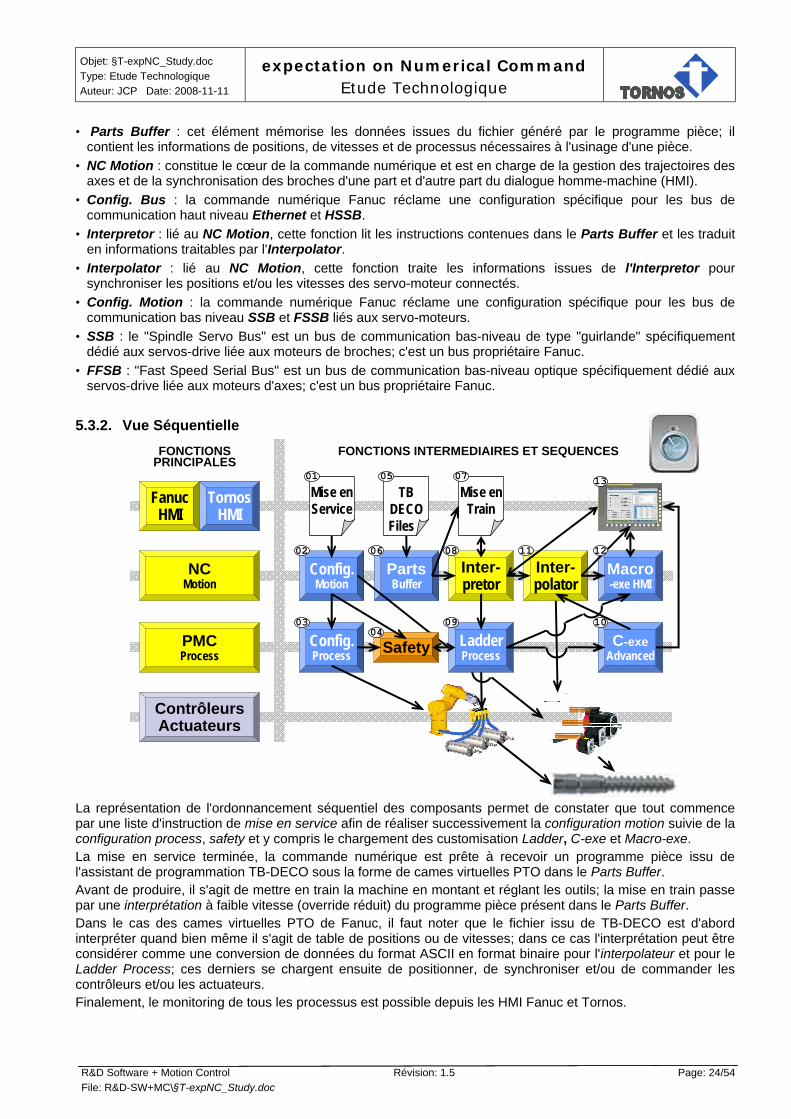
• Parts Buffer : cet élément mémorise les données issues du fichier généré par le programme pièce; il contient les informations de positions, de vitesses et de processus nécessaires à l'usinage d'une pièce.
• NC Motion : constitue le cœur de la commande numérique et est en charge de la gestion des trajectoires des axes et de la synchronisation des broches d'une part et d'autre part du dialogue homme-machine (HMI).
• Config. Bus : la commande numérique Fanuc réclame une configuration spécifique pour les bus de communication haut niveau Ethernet et HSSB.
• Interpretor : lié au NC Motion, cette fonction lit les instructions contenues dans le Parts Buffer et les traduit en informations traitables par l'Interpolator.
• Interpolator : lié au NC Motion, cette fonction traite les informations issues de l'Interpretor pour synchroniser les positions et/ou les vitesses des servo-moteur connectés.
• Config. Motion : la commande numérique Fanuc réclame une configuration spécifique pour les bus de communication bas niveau SSB et FSSB liés aux servo-moteurs.
• SSB : le "Spindle Servo Bus" est un bus de communication bas-niveau de type "guirlande" spécifiquement dédié aux servos-drive liée aux moteurs de broches; c'est un bus propriétaire Fanuc.
• FFSB : "Fast Speed Serial Bus" est un bus de communication bas-niveau optique spécifiquement dédié aux servos-drive liée aux moteurs d'axes; c'est un bus propriétaire Fanuc.
5.3.2. Vue Séquentielle
PartsBuffer
NCMotion
TornosHMI
PMCProcess
FanucHMI
Config.Process
Config.Motion
C-exeAdvanced
TBDECOFiles
Mise enService
Mise enTrain
FONCTIONSPRINCIPALES
LadderProcessSafety
Inter-pretor
Inter-polator
Macro-exe HMI
ContrôleursActuateurs
01
02
0403
05
06 08
07
09
11
10
12
13
FONCTIONS INTERMEDIAIRES ET SEQUENCES
La représentation de l'ordonnancement séquentiel des composants permet de constater que tout commence par une liste d'instruction de mise en service afin de réaliser successivement la configuration motion suivie de la configuration process, safety et y compris le chargement des customisation Ladder, C-exe et Macro-exe. La mise en service terminée, la commande numérique est prête à recevoir un programme pièce issu de l'assistant de programmation TB-DECO sous la forme de cames virtuelles PTO dans le Parts Buffer. Avant de produire, il s'agit de mettre en train la machine en montant et réglant les outils; la mise en train passe par une interprétation à faible vitesse (override réduit) du programme pièce présent dans le Parts Buffer. Dans le cas des cames virtuelles PTO de Fanuc, il faut noter que le fichier issu de TB-DECO est d'abord interpréter quand bien même il s'agit de table de positions ou de vitesses; dans ce cas l'interprétation peut être considérer comme une conversion de données du format ASCII en format binaire pour l'interpolateur et pour le Ladder Process; ces derniers se chargent ensuite de positionner, de synchroniser et/ou de commander les contrôleurs et/ou les actuateurs. Finalement, le monitoring de tous les processus est possible depuis les HMI Fanuc et Tornos.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 25/54 File: R&D-SW+MC\§T-expNC_Study.doc
5.3.3. Vue Hiérarchique
PMCProcess
C-exeAdvanced
FSSBSSBIO-link Ethernet
PartsBuffer
Safety
Macro-exe HMI
IO-link
Config. Process Config. Motion
NCMotion
LadderProcess
HSSB
FanucHMI
TornosHMI
Actuateurs
Contrôleurs
Interfacesréseaux
ConfigurationsSpécifiques
FonctionsStandards
FonctionsSpécifiques
Conf. Bus
CEN
TRA
LE ME
MO
RY
CA
RD
JA41
JA41
JA41
JA41
JA41
ETHE
RNE
T
CP1 CP2
CO
P1LE
D1
SWIT
CH
LED
2PS
W
SLOT1
SLOT2
ME
MO
RY
CA
RD
JA41
JA41
JA41
JA41
JA41
ETHE
RNE
T
CP1 CP2
CO
P1LE
D1
SWIT
CH
LED
2PS
W
SLOT1
SLOT2
Wintel Std
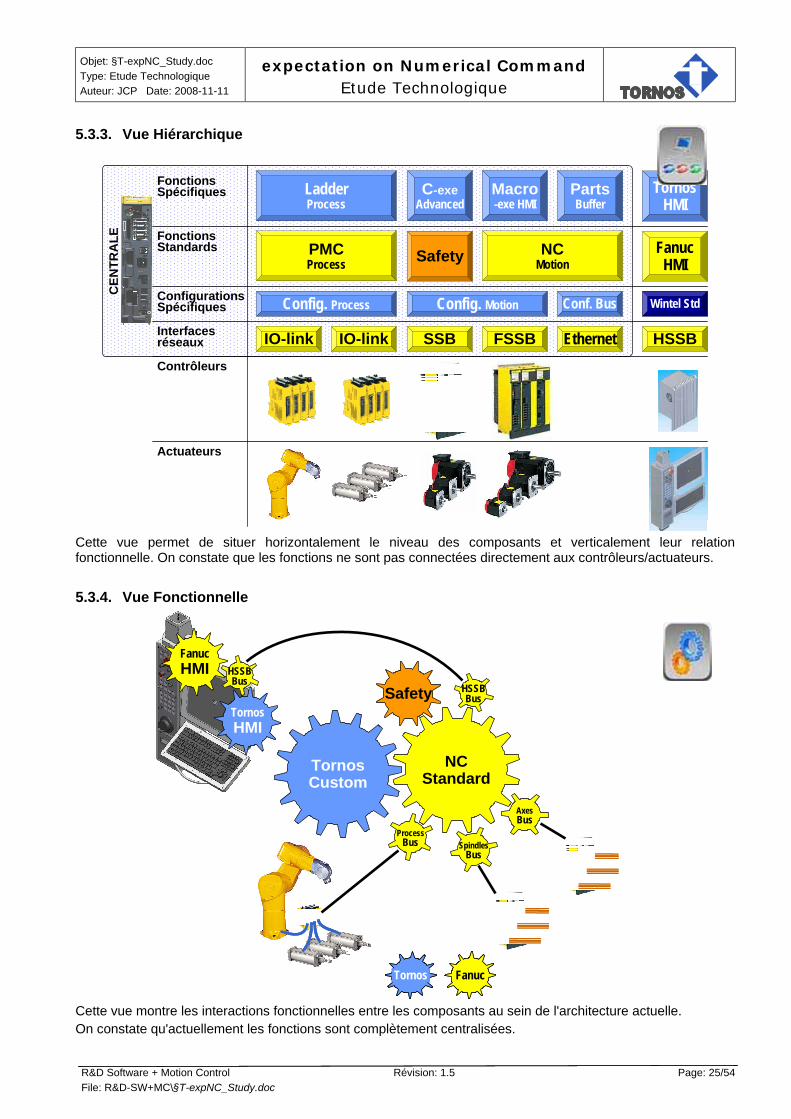
Cette vue permet de situer horizontalement le niveau des composants et verticalement leur relation fonctionnelle. On constate que les fonctions ne sont pas connectées directement aux contrôleurs/actuateurs. 5.3.4. Vue Fonctionnelle
TornosCustom
NCStandard
TornosTornos FanucFanuc
HSSBBus HSSB
Bus
SpindlesBus
ProcessBus
AxesBus
Safety
FanucHMI
TornosHMI
Cette vue montre les interactions fonctionnelles entre les composants au sein de l'architecture actuelle. On constate qu'actuellement les fonctions sont complètement centralisées.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 26/54 File: R&D-SW+MC\§T-expNC_Study.doc
5.4. Architecture distribuée 5.4.1. Définition http://fr.wikipedia.org/wiki/Architecture_distribuee, l’architecture d'un environnement informatique ou d'un réseau est dite distribuée quand toutes les ressources ne se trouvent pas au même endroit ou sur la même machine. On parle également d'informatique distribuée. Ce concept s'oppose à celui d'architecture centralisée dont une version est l'architecture client-serveur. Internet est un exemple de réseau distribué puisqu'il ne possède aucun nœud central. Les architectures distribuées reposent sur la possibilité d'utiliser des objets qui s'exécutent sur des machines réparties sur le réseau et communiquent par messages au travers du réseau. Les soubassements technologiques de l'informatique distribuée: Au début de l'informatique, le dialogue entre machines nécessitait une connaissance approfondie des protocoles réseau et parfois même du matériel réseau. La programmation orientée objet à permis le développement des architectures distribuées en fournissant des bibliothèques de haut-niveau pour faire dialoguer des objets réparties sur des machines différentes entre eux, ce qui a considérablement allégé le travail des programmeurs. Les objets distribués sur le réseau communiquent par messages en s'appuyant sur des technologies SOA (service oriented architecture) • CORBA, Common Object Request Broker Architecture, ce standard de l'Object Management Group permet
de faire communiquer des objets écrits dans des langages différents (C++, Java, Smalltalk) et même d'encapsuler des programmes écrits dans des langages procéduraux pour les faire passer pour des objets.
• RMI, Remote Method Invocation, cette technologie de Sun permet de faire communiquer très simplement des objets java distribués sur le réseau.
• Web XML, le Net Remoting, le Windows Communication Foundation, etc... (Note: ces 3 dernières technologies constituent le cœur du BackBus de SW-Platform)
Les avantages de l'informatique distribuée: • L'augmentation des ressources, le seul fait de distribuer les traitements sur les ordinateurs d'un réseau
augmente les ressources disponibles. En théorie, si le réseau est internet, tous les ordinateurs connectés constituent des ressources potentielles. C'est le sens du slogan de Sun : "The Computer is the Network". Les projets de calcul réparti tirent parti de cette formidable ressource de processeurs que sont les ordinateurs inactifs connectés à internet. Un célèbre exemple de calcul distribué est SETI@Home issu du projet Search for Extraterrestrial Intelligence, qui met à contribution tous les ordinateurs volontaires d'internet pour détecter une intelligence extra-terrestre. Les ordinateurs effectuent la même tâche (décryptage de signaux spatiaux), chacun sur un coin de ciel différent. Ce projet a fédéré plus de 5 millions de personnes différentes à travers le monde et a crédibilisé le calcul partagé (à défaut d'avoir découvert des extraterrestres pour le moment). Les projets comportant des calculs parallélisables sont de bons candidats pour une architecture distribuée (séquençage de motifs d'ADN).
• La répartition des données et des services, une architecture distribuée courante est l'architecture trois tiers à la base de la plupart des applications distribuées de commerce électronique. Cette architecture permet d'interroger et de mettre à jour des sources de données réparties. Les services web permettent de faire appel à différents serveurs pour enrichir une prestation (l'achat d'un séjour touristique peut comprendre l'achat d'un billet d'avion, d'un séjour hôtelier et d'une assurance annulation auprès de différents vendeurs par l'intermédiaires de services web, donc d'objets distribués sur les réseaux et dialoguant par des messages.
• Le peer-to-peer (ou poste à poste), le modèle peer-to-peer (partage de fichiers) est un exemple de réussite des architectures distribuées où chaque ordinateur est à la fois serveur de données et client des autres. Ce modèle peut être appliqué au partage de ressource.
Les effets pour l'informatique industrielle: • L'informatique industrielle est de plus en plus embarquée, c-à-d localisée au plus près des équipements
réalisant les processus; cette délocalisation induit nécessairement une autonomisation et par conséquent une distribution de la gestion des processus.
• Toutes les données spécifiques aux équipements restent dans les équipements; seules les données communes sont remontées dans les nœuds centraux.
• Outre ces données communes, les nœuds centraux se chargent de gérer les interactions entre les équipements qui s'avèrent être dans la majorité des cas des synchronisations.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 27/54 File: R&D-SW+MC\§T-expNC_Study.doc
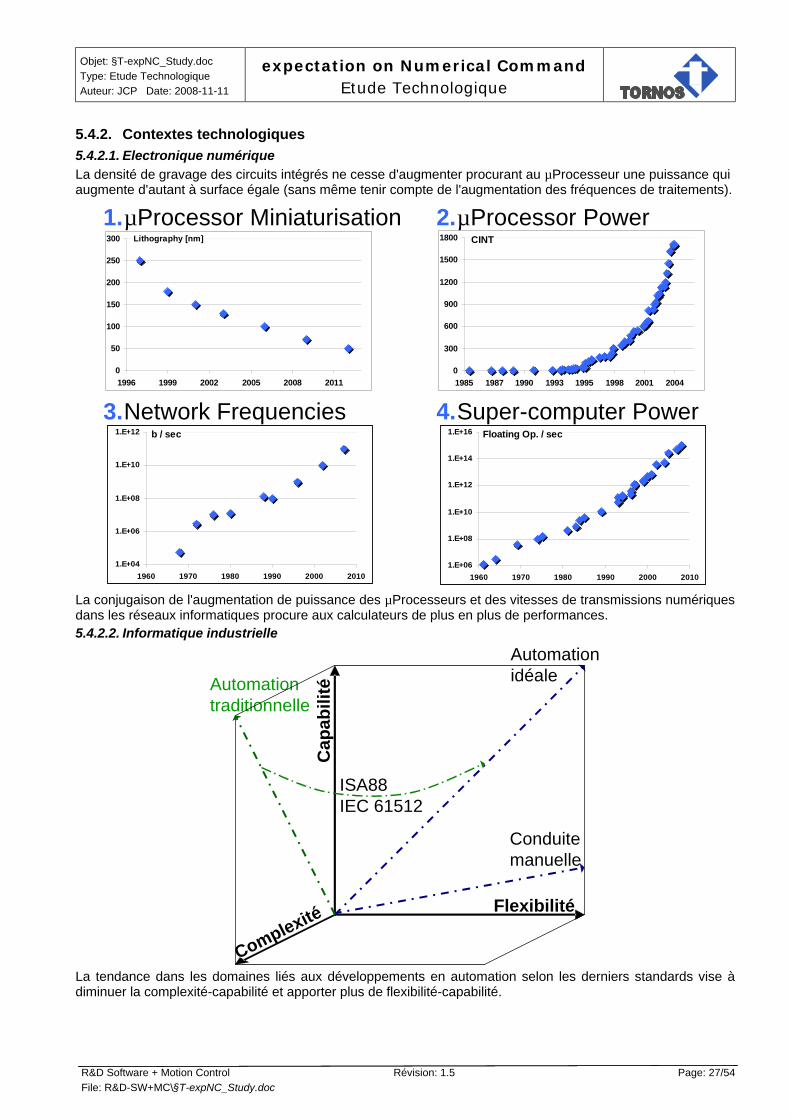
5.4.2. Contextes technologiques 5.4.2.1. Electronique numérique La densité de gravage des circuits intégrés ne cesse d'augmenter procurant au µProcesseur une puissance qui augmente d'autant à surface égale (sans même tenir compte de l'augmentation des fréquences de traitements).
b / sec
1.E+04
1.E+06
1.E+08
1.E+10
1.E+12
1960 1970 1980 1990 2000 2010
Floating Op. / sec
1.E+06
1.E+08
1.E+10
1.E+12
1.E+14
1.E+16
1960 1970 1980 1990 2000 2010
3.Network Frequencies 4.Super-computer Power
2.µProcessor Power1.µProcessor Miniaturisation Lithography [nm]
0
50
100
150
200
250
300
1996 1999 2002 2005 2008 2011
CINT
0
300
600
900
1200
1500
1800
1985 1987 1990 1993 1995 1998 2001 2004
La conjugaison de l'augmentation de puissance des µProcesseurs et des vitesses de transmissions numériques dans les réseaux informatiques procure aux calculateurs de plus en plus de performances. 5.4.2.2. Informatique industrielle
Automationtraditionnelle
Cap
abili
té
Flexibilité
Conduitemanuelle
Automationidéale
ISA88IEC 61512
Complexité
La tendance dans les domaines liés aux développements en automation selon les derniers standards vise à diminuer la complexité-capabilité et apporter plus de flexibilité-capabilité.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 28/54 File: R&D-SW+MC\§T-expNC_Study.doc
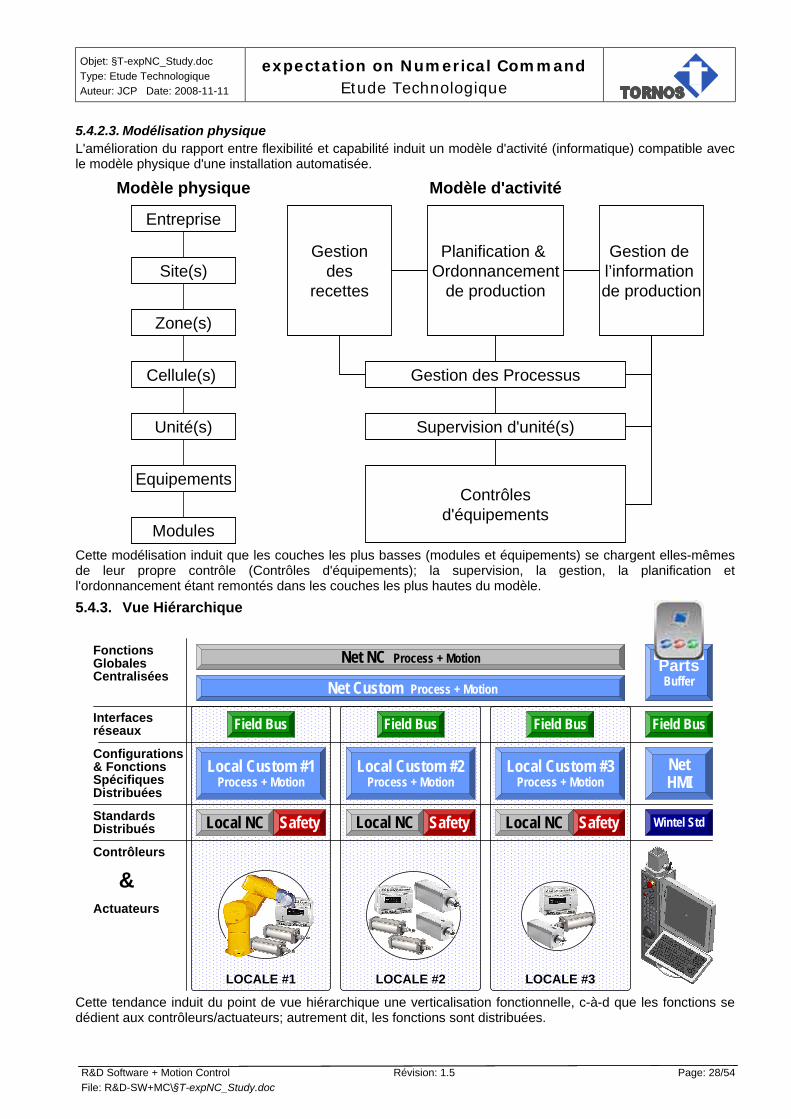
5.4.2.3. Modélisation physique L'amélioration du rapport entre flexibilité et capabilité induit un modèle d'activité (informatique) compatible avec le modèle physique d'une installation automatisée.
Unité(s)
Zone(s)
Site(s)
Entreprise
Cellule(s)
Equipements
Modules
Modèle physique Modèle d'activité
Gestion de l’informationde production
Gestion des Processus
Supervision d'unité(s)
Contrôlesd'équipements
Gestiondes
recettes
Planification & Ordonnancement
de production
Cette modélisation induit que les couches les plus basses (modules et équipements) se chargent elles-mêmes de leur propre contrôle (Contrôles d'équipements); la supervision, la gestion, la planification et l'ordonnancement étant remontés dans les couches les plus hautes du modèle. 5.4.3. Vue Hiérarchique
LOCALE #3LOCALE #2
PartsBuffer
NetHMI
Actuateurs
Contrôleurs
Interfacesréseaux
StandardsDistribués
Configurations& FonctionsSpécifiquesDistribuées
&
Local Custom #1Process + Motion
Local Custom #2Process + Motion
Local Custom #3Process + Motion
Local NC Safety Local NC Safety Local NC Safety
Field BusField BusField BusField Bus
FonctionsGlobalesCentralisées
Net NC Process + Motion
Net Custom Process + Motion
LOCALE #1
Wintel Std
Cette tendance induit du point de vue hiérarchique une verticalisation fonctionnelle, c-à-d que les fonctions se dédient aux contrôleurs/actuateurs; autrement dit, les fonctions sont distribuées.
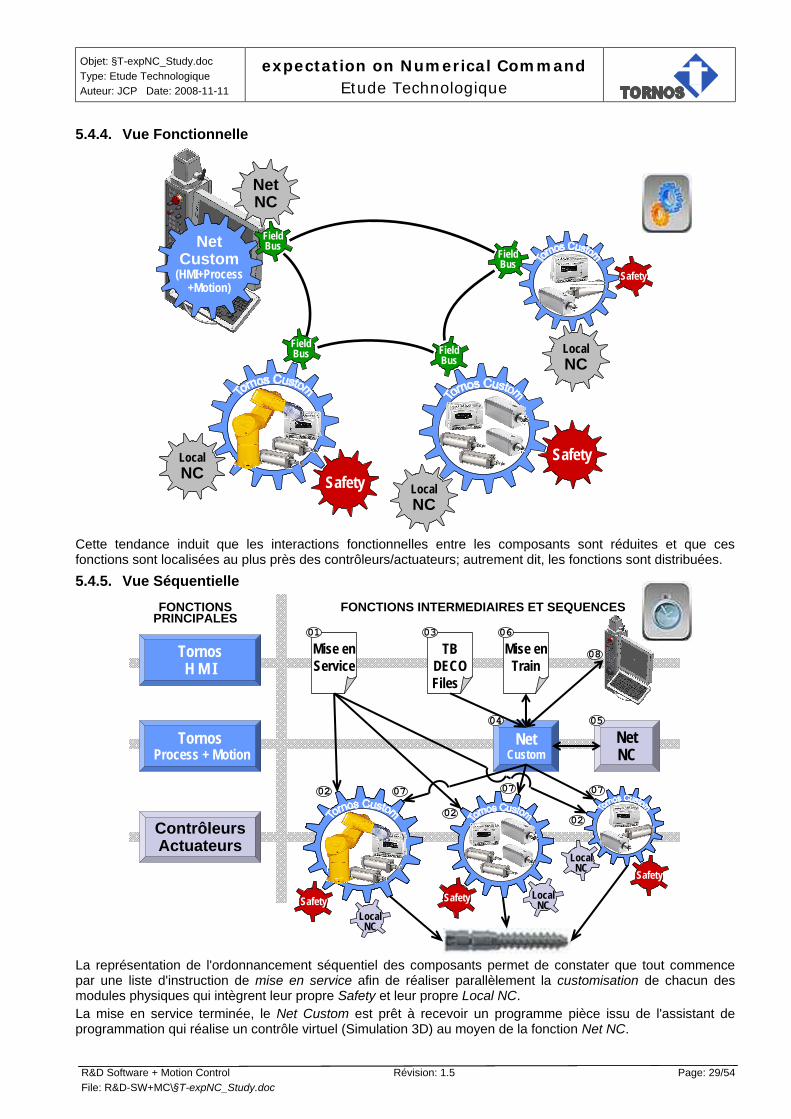
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 29/54 File: R&D-SW+MC\§T-expNC_Study.doc
5.4.4. Vue Fonctionnelle
LocalNC Safety
LocalNC
Safety
LocalNC
Safety
FieldBus
FieldBus
FieldBus Field
Bus
NetNC
NetCustom
(HMI+Process+Motion)
Cette tendance induit que les interactions fonctionnelles entre les composants sont réduites et que ces fonctions sont localisées au plus près des contrôleurs/actuateurs; autrement dit, les fonctions sont distribuées. 5.4.5. Vue Séquentielle
TBDECOFiles
Mise enService
Mise enTrain
FONCTIONSPRINCIPALES
ContrôleursActuateurs
01 03 06
FONCTIONS INTERMEDIAIRES ET SEQUENCES
TornosH M I
NetCustom
NetNC
TornosProcess + Motion
SafetyLocal
NC
Safety LocalNC
SafetyLocal
NC
0202 02
04 05
07 07 07
08
La représentation de l'ordonnancement séquentiel des composants permet de constater que tout commence par une liste d'instruction de mise en service afin de réaliser parallèlement la customisation de chacun des modules physiques qui intègrent leur propre Safety et leur propre Local NC. La mise en service terminée, le Net Custom est prêt à recevoir un programme pièce issu de l'assistant de programmation qui réalise un contrôle virtuel (Simulation 3D) au moyen de la fonction Net NC.

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 30/54 File: R&D-SW+MC\§T-expNC_Study.doc
5.5. Exemple DECO13a 5.5.1. Modèle
NetNC
NetCustom
(HMI+Process+Motion)
En appliquant une architecture distribuée à une DECO13a, on obtiendrait 7 modules principaux: le bar-feeder, la main operation, le gang #1, le gang #2, le gang #3, la counter operation et finalement le recuperator. 5.5.2. Vue Structurelle La vue précédente montrait le lien avec les modules mécaniques, la vue suivante montre le lien avec les modules électriques.
NetNC
NetCustom
(HMI+Process+Motion)
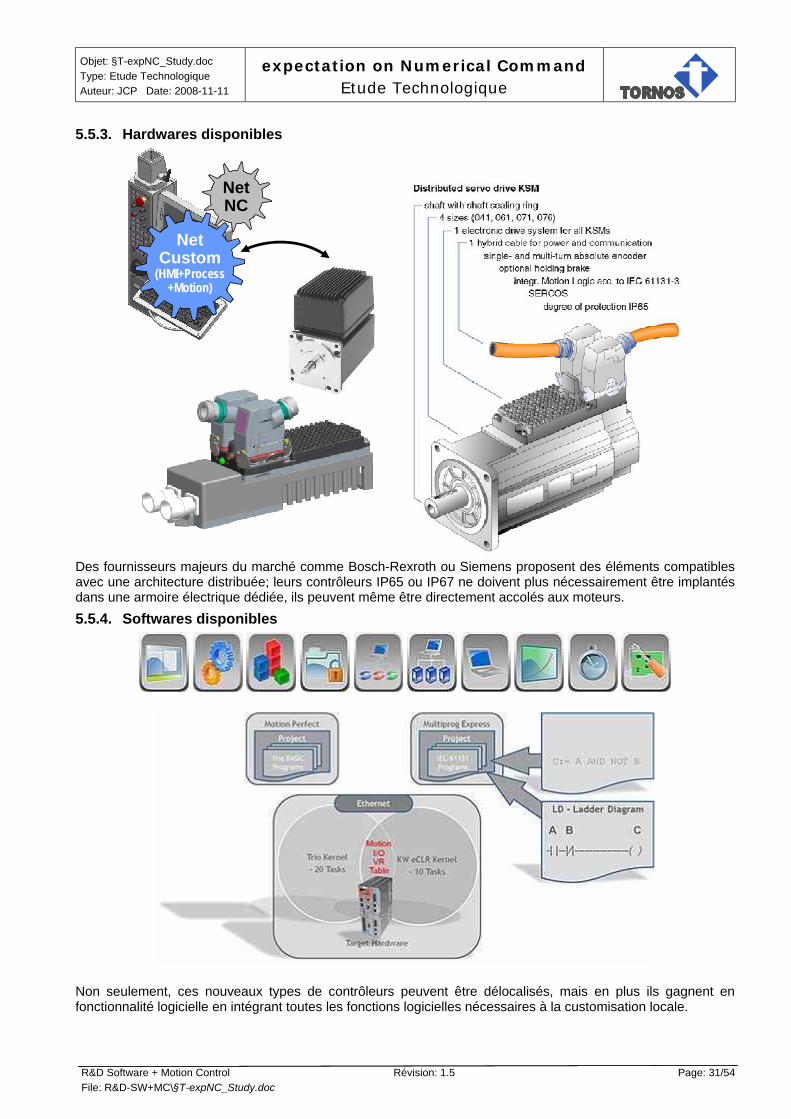
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 31/54 File: R&D-SW+MC\§T-expNC_Study.doc
5.5.3. Hardwares disponibles
NetNC
NetCustom
(HMI+Process+Motion)
Des fournisseurs majeurs du marché comme Bosch-Rexroth ou Siemens proposent des éléments compatibles avec une architecture distribuée; leurs contrôleurs IP65 ou IP67 ne doivent plus nécessairement être implantés dans une armoire électrique dédiée, ils peuvent même être directement accolés aux moteurs. 5.5.4. Softwares disponibles
Non seulement, ces nouveaux types de contrôleurs peuvent être délocalisés, mais en plus ils gagnent en fonctionnalité logicielle en intégrant toutes les fonctions logicielles nécessaires à la customisation locale.
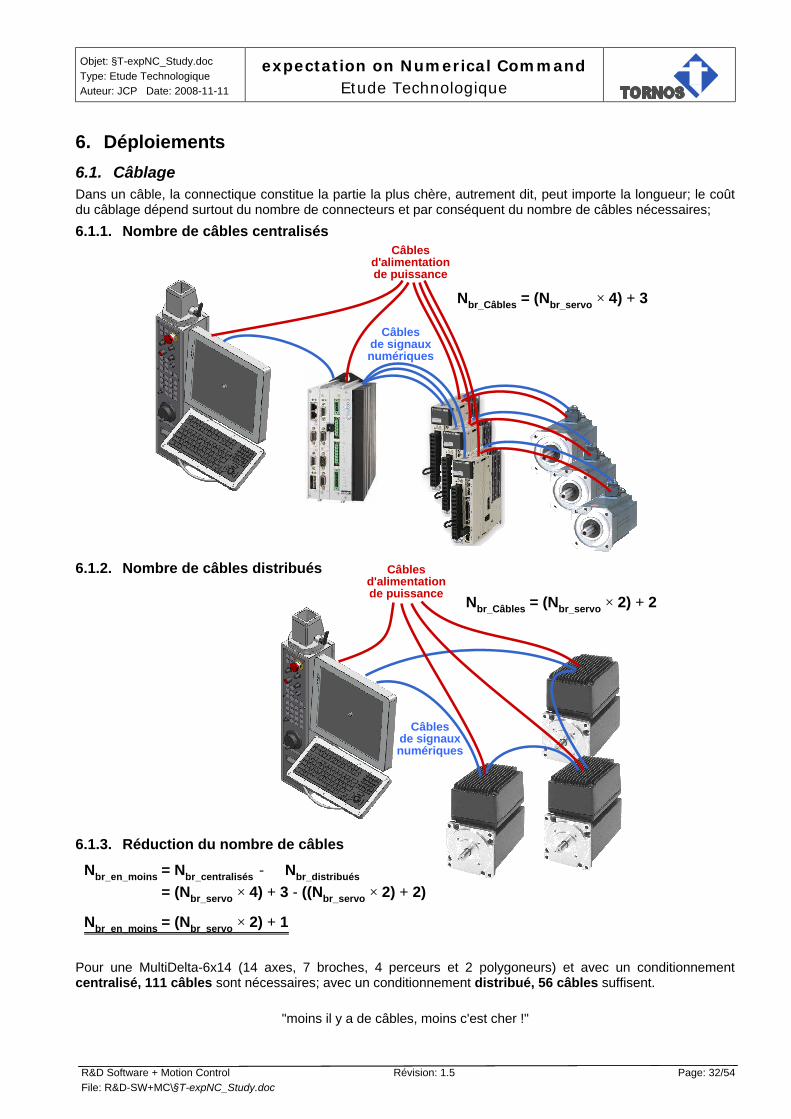
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 32/54 File: R&D-SW+MC\§T-expNC_Study.doc
Câblesd'alimentationde puissance
Câblesde signauxnumériques
Nbr_Câbles = (Nbr_servo × 2) + 2
6. Déploiements 6.1. Câblage Dans un câble, la connectique constitue la partie la plus chère, autrement dit, peut importe la longueur; le coût du câblage dépend surtout du nombre de connecteurs et par conséquent du nombre de câbles nécessaires; 6.1.1. Nombre de câbles centralisés
Câblesd'alimentationde puissance
Câblesde signauxnumériques
Nbr_Câbles = (Nbr_servo × 4) + 3
6.1.2. Nombre de câbles distribués 6.1.3. Réduction du nombre de câbles
Nbr_en_moins = Nbr_centralisés - Nbr_distribués= (Nbr_servo × 4) + 3 - ((Nbr_servo × 2) + 2)
Nbr_en_moins = (Nbr_servo × 2) + 1
Pour une MultiDelta-6x14 (14 axes, 7 broches, 4 perceurs et 2 polygoneurs) et avec un conditionnement centralisé, 111 câbles sont nécessaires; avec un conditionnement distribué, 56 câbles suffisent.
"moins il y a de câbles, moins c'est cher !"

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 33/54 File: R&D-SW+MC\§T-expNC_Study.doc
6.2. Conditionnement 6.2.1. Armoire électrique Avec une architecture traditionnelle, les amplificateurs sont centralisés dans une armoire dédiée (exemple avec une MultiDelta-6x14 pilotant 7 broches, 4 perceurs, 2 polygoneurs et 14 axes). Le volume nécessaire atteint actuellement 0.79 m3. En gardant l'ampli ETEL et la CN-30i dans l'armoire électrique en plus des platines d'alimentation, la réduction de volume atteint 0.47 m3, soit 60% avec un conditionnement de commande numérique distribuée. 6.2.2. Temps de Câblage
La longueur des câbles entre les amplificateurs et les moteurs est en moyenne de 5 m avec un ∅ moyen de 6 mm, soit un volume de 0.00014 m3 par câble installé entre l'armoire et un moteur-codeur. Dans le cas de la MultiDelta-6x14, on obtient 27 × 2 × 0.00014 = 0.0075 m3 rien que pour câbler les éléments moteurs et codeurs. De plus cette technique archaïque réclame un grand soin de la part des personnels chargés du câblage car il faut veiller à brancher le bon câble au bon endroit sur des distances relativement importantes et le type de câble requis entre un amplificateur et un moteur est souvent très délicat. Pour information, l'armoire étant préalablement câblée, le temps de câblage final au sein d'une MultiDelta-6x14 nécessitera 4 à 6 hr. Avec un conditionnement de commande numérique distribuée, on adopte un mode de câblage dénommé "multiplexé" (utilisé depuis le siècle dernier dans le domaine automobile) qui associe un réseau d'alimentation électrique tout simple avec un réseau adressable d'informations numériques. Le volume utilisé pour le câblage n'est pas forcément moindre, mais il est beaucoup plus rapide à mettre en œuvre, la durée du travail de câblage a ainsi été réduite de 85% dans l'automobile ces dernières décennies. En appliquant ce ratio à une MultiDelta-6x14, le temps de câblage passerait de 6 hr à 1 hr. Siemens et Bosch-Rexroth publient les estimations suivantes pour les ampli-moteur-codeurs intégrés: • réduction du coût total de possession TCO, de 20 à 30%. • réduction de la taille des armoires électriques, jusqu'à 70%. • réduction de la durée du travail de câblage, jusqu'à 85%.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 34/54 File: R&D-SW+MC\§T-expNC_Study.doc
7. Solution La tendance actuelle à modulariser (spécialiser) des éléments de machine induit une réflexion de type mécatronique visant à associer la mécanique, l'électrique, l'électronique et le logiciel au sein d'organes dédiés. • l'association entre la mécanique et l'électrique aboutit à la notion de "process + motion". • l'association entre l'électrique et l'électronique aboutit à la notion d'"ampli + moteur + codeur". • l'association entre l'électronique et le logiciel aboutit à la notion "commande numérique distribuée". • l'association de toutes ces disciplines au sein d'un module induit une gestion de "sécurité locale". Paradoxalement, la hiérarchisation des organes d'une machine d'un point de vue mécatronique induisant une notion de commande numérique distribuée conduit à une plus forte intégration mécanique-électrique-électronique-logiciel-sécurité en local.
7.1. Process+motion Continuer de séparer au sein d'une machine-outil, le "Process Control" et le "Motion Control" n'a plus aucun sens. C'est une résurgence des limitations technologiques passées notamment en matière de capacité de traitement des unités électroniques embarquées. Dès lors que la technologie le permet, il s'agit d'adopter une pensée orientée module (ou objet...) car c'est ainsi que l'on assure la productivité et la cohérence des développements, la pérennité de la connaissance et la réutilisation. La pensée orientée module ne différencie pas les éléments dédiés au motion des éléments dédiés au process. La commande numérique est en charge du "process control" et du "motion control".
7.2. Ampli+moteur+codeurs Tout le monde s'accorde: les moteurs et leur électronique de contrôle n'ont pas été créés comme des égaux. Ils vivent dans deux environnements différents. Les amplificateurs bénéficient d'environnements plus sûrs, plus frais, plus centralisés, tandis que les moteurs font face à de conditions hostiles de température, d'humidité, de vibrations et de poussière. Ces conditions ont exigé qu'ils opèrent dans des endroits distincts, connectés par des câbles de puissance, de contrôle et de communication. Alors, pourquoi associer les moteurs et leur amplificateur et les réunir ainsi dans un même lieu ? Durant les dix dernières années, la technologie a évolué au point que les composants électroniques peuvent désormais opérer dans des environnements beaucoup plus difficiles. Cela a permis aux deux disciplines, moteurs et amplificateurs, de fusionner. Les fabricants semblent cette fois désireux de vendre les avantages des ampli-moteur-codeurs intégrés. En éliminant les enveloppes distinctes et les longs câbles, l'approche intégrée est une promesse de baisses de coûts évalués entre 20 et 30% aux dires de certains fournisseurs. Le coût total de possession TCO des amplis-moteurs est également plus faible parce que le fabricant peut expédier des ensembles pré-testés et pré-configurés suffisamment autonomes pour être effectivement considérés comme "plug & play". Un autre point en faveur: les émissions EMC sont réduites par l'élimination des problèmes liés aux longs et coûteux câbles entre le moteur et l'ampli, qui sont sujets à des pics de tension (d'où émissions). Cette nouvelle catégorie de produits s'inscrit sous une variété de noms, tels que smart moteur, variateur de vitesse moteur, moteur à ampli intégré ou ampli-moteur-codeur embarqué. Plus généralement, le terme en usage est Integrated Motor Drive (ampli-moteur-codeur intégré), En dépit de leurs avantages apparents, les OEM et les utilisateurs finaux n'ont pas été trop pressés d'acheter ces produits. En fait, les ampli-moteur-codeurs n'ont pas atteint le potentiel prévu lors de leur introduction sur le marché. Les prévisions de croissance du marché et les plages de puissances optimistes ont été réduites. En fait, des unités d'au moins 18 kW ont été promises mais ne sont pas arrivées. De même, des amplificateurs plus sophistiqués ne sont pas encore disponibles en raison de retard sur la demande car leurs développements exigent des prévisions de volumes de ventes conséquents. Pourtant, les ampli-moteur-codeurs sont prêts pour une plus large acceptation par les utilisateurs. Un signe positif pour le concept des ampli-moteur-codeurs intégrés est la tendance croissante vers des architectures de contrôle distribué; la technologie des ampli-moteur-codeurs participe à cette démarche. A développer (selon PhS) : • vs Conséquences , la notion d'ampli-moteur-codeur introduit l'idée d'un axe intégré "intelligent" et "froid"
auquel serait associé les éléments mécaniques de commandes, de graissage, de refroidissement, de détection de bris d'outils, etc...
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 35/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.2.1. Les environnements hostiles Les ampli-moteur-codeurs intégrés ont deux obstacles à surmonter. Tout d'abord, l'ampli doit être capable de résister aux environnements industriels hostiles. Et plus important encore, l'ampli directement accolé au moteur est comme posé sur un réchaud électrique augmentant artificiellement sa propre chaleur. L'effet du chauffage est, en fait, le plus grand ennemi des ampli-moteur-codeurs. Les dissipations produites à la fois par le moteur et la commutation électronique de l'ampli multiplient la quantité de chaleur émise. En conséquence, la gestion thermique de ces ensembles intégrés a du être améliorée afin de lutter contre ce problème. Cela a été accompli avec une conception optimisée de la mécanique et des composants structurels, des puits de chaleur et de refroidissement et avec une disposition soignée des éléments. La technologie a ainsi évolué jusqu'à un certain seuil de puissance possible. La plupart des fournisseurs d'ampli-moteur-codeurs proposent aujourd'hui jusqu'à 7,5 kW de puissance moteur. Ce 7,5-kW représente le plateau au-dessus du quel les effets de chaleurs combinées ne sont plus maîtrisés correctement. Commercialiser des unités plus puissantes induira des conceptions plus complexes. La vitesse du moteur est un autre facteur dans la gestion thermique. A haute vitesse, un ventilateur moteur par arbre moteur fournit suffisamment de refroidissement, mais cela devient insuffisant à basse vitesse. Cette situation est aggravée par le principe des ampli-moteur-codeurs et l'élargissement des gammes de vitesses. Aujourd'hui, la gamme de vitesse typique est 10:1, mais des fabricants, en utilisant des amplis plus sophistiqués, offrent 50:1. L'extension de la gamme de vitesses n'est pas simple, parce que plus la vitesse est faible, plus le refroidissement est nécessaire pour compenser la plus forte production de chaleur. Un moteur fonctionnant à 30 tr/min pour certaines périodes, nécessite généralement l'apport d'un ventilateur dont la vitesse est gérer de manière indépendante de la vitesse du moteur lui-même. L'emplacement de l'électronique de l'ampli sur le moteur suit 2 tendances; l'une dispose l'ampli au-dessus du moteur privilégiant un moindre encombrement, l'autre place l'ampli à l'arrière du moteur afin de réduire l'exposition à la chaleur; c'est une question de philosophie de conception. Les vibrations et les interférences électromagnétiques (EMI) induisent d'autres considérations environnementales pour les ampli-moteur-codeurs. La conception substantiellement "durcie" de l'électronique et l'équilibrage initial soigné du rotor réduisent les risques. Ainsi Siemens A & D fait état de la conception spéciale de l'électronique de son "Combimaster" afin de résister à des vibrations ou des chocs pouvant atteindre 5g. D'un autre côté, la disparition intrinsèque du câblage entre le moteur et l'ampli réduit aussi les risques liés aux vibrations. Pour les interférences électromagnétiques, la plupart des fournisseurs incluent des filtres EMI dans leurs unités. Par exemple, Combimaster est fourni avec des filtres EMI de classe A et B. A développer (selon PhS) : • vs Effets thermiques, associer aux ampli-moteur-codeurs leur propre contrôle du refroidissement par liquide
de coupe (par ex. via une plaque-coussin intermédiaire) et sondes de température. • vs Vibrations et chocs, associer en temps-réel des vibromètres ou des accéléromètres dans la contre-réaction
de position ou de vitesse de l'équipement. • vs Interférences électromagnétiques, boucles de masse et courants parasites vis-à-vis des équipements. • vs connectique, le coût et la fiabilité à ce propos mérite d'être plus approfondi. 7.2.2. Les coûts et les questions liées au marché Les considérations de coûts pour les ampli-moteur-codeurs ne sont pas simples. Du fait des moindres quantités commercialisées, une des caractéristiques des ampli-moteur-codeurs induit une prime sur le coût initial par rapport à un moteur et son amplificateur associés classiquement. Ainsi le conditionnement durci et la gestion thermique poussée INDUISAIT un surcoût compris entre 15 et 20% pour l'achat de l'ensemble ampli-moteur-codeur seul. Les dernières offres disponibles sur le marché infirment cela; ainsi Bosh-Rexroth propose sa gamme d'ampli-moteur-codeurs avec les accessoires 10% moins cher que sa gamme traditionnelle avec les câbles, firmwares, etc... D'ailleurs Siemens revendique un coût global drastiquement réduit lorsque des facteurs tels que le câblage entre les composants individuels, un panneau de contrôle pour l'ampli, la climatisation et l'entretien sont pris en compte. Le composant coût fait alors apparaître des économies de 20 à 30% avec l'approche intégrée. Rockwell Automation AC Drives Business cite un chiffre encore plus important pour la réduction de coût total installé: jusqu'à 40%. Cependant, le coût total de possession TCO reste difficile à vendre aux intégrateurs potentiels plus préoccupés par les coûts initiaux et qui hésitent avec les nouvelles technologies. Les récentes études de marché indiquent que la tarification des ampli-moteur-codeurs est cruciale pour leur expansion. En d'autres termes, pour élargir son audience, le coût initial des ampli-moteur-codeurs doit également devenir plus compétitif par rapport aux éléments utilisant des technologies classiques.

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 36/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.2.3. La mise en réseau est la clé De nombreux utilisateurs ont des préoccupations quant à la fiabilité de l'électronique de l'amplificateur disposée juste à côté du moteur. Qui sera responsable du maintien de la combinaison ampli-moteur-codeur ? Moteurs et amplificateurs sont souvent pris en charge par des services de maintenance distincts; Y aura-t-il quelqu'un pour s'occuper des deux ? En automation ou en contrôle industriel, les moteurs sont généralement alimentés depuis des armoires centrales où sont disposés les amplificateurs; déplacer les amplificateurs vers les moteurs n'apporte pas grand chose tant que le câblage des entrées-sorties des automates programmables associés n'adopte pas la même architecture distribuée. Pour que les ampli-moteur-codeurs intégrés deviennent plus populaires, ils doivent donc avoir une bonne capacité de communication. Le contrôle à distance, la communicabilité et la mise en réseau doivent être perfectionnés. L'ampli-moteur-codeur se doit d'intégrer d'emblée toutes les caractéristiques d'un réseau de communication standard. Un bus de terrain (fieldbus) avec un câblage en guirlande (daisy Chain) de plusieurs ampli-moteur-codeurs simplifie l'intégration. Bien que l'usage d'un bus de terrain améliore la fiabilité et simplifie l'intégration, il faut garder la possibilité de déconnecter ou de disjoncter; le câble d'alimentation doit rester dédié à un ampli-moteur-codeur ou à un groupe d'ampli-moteur-codeurs. 7.2.4. L'avenir des ampli-moteur-codeurs Pas d'augmentation de puissance au-delà de 7,5 kW dans un proche avenir (Baldor Electric, Lenze, ou autres). Siemens parle d'un "potentiel" de croissance de 15 kW. Une exception notable est disponible chez VEM Motors GmbH. avec 22 kW. Par contre, c'est le boum dans le domaine des petites unités avec des acteurs comme Danfoss, Baldor ou Lenze. Le plus grand défi des ampli-moteur-codeurs intégrés est de parvenir à des coûts initiaux comparables et de promouvoir les avantages du produit aux utilisateurs potentiels. Les ampli-moteur-codeurs intégrés seront alors une véritable alternative à l'implantation traditionnelle. Certains fabricants doivent adopter une attitude plus active, ce qui n'est pas une tâche facile quand il s'agit d'entrer en concurrence avec d'autres produits maison. 7.2.5. Ampli-moteur-codeurs représentatifs Company and URL Product KW V input Layout ABB www.abb.com/motors&drives Integral motor 0.75-7.5 240/380-460 Axial Baldor Electric www.baldor.com SmartMotor 0.75-7.5 230/460 Top Bonfiglioli Group www.bonfiglioli.com LMS Series 0.37-4.0 400-500 Top Bosh-Rexroth www.boschrexroth.com IndraDrive MI 0.75-7-5 540-750 Top Carpanelli Motori www.carpanelli.it MII Series 1.50-4.0 380-440 Top Danfoss www.danfoss.com FCM 300 0.55-7.5 380-460 Top & radial Danfoss Bauer www.danfoss.com Eta Solution 0.18-7.5 380-460 Top & radial Franklin Electric www.fele.com IMDS 0.25-0.75 115/230 Top Grundfos www.grundfos.com MLE Motor 0.75-7.5 330/460 Top Invensys Brook Crompton www.brookcrompton.com
VSM 'W' Series
0.55-7.5 380-480 Top & radial
Kebco www.kebco.com Combidrive 0.75-2.2 230/460 Top Lenze www.lenze.com 8200 motec 0.55-2.2 320-550 (230) Top & radial Leroy-Somer www.leroy-somer.com Varmeca 0.75-7.5 230/400 (460) Top Mannesmann Dematic www.dematic.com Indrive 0.22-3.6 380-500 Radial Rockwell Automation www.rockwellautomation.com
1329I VSM 0.75-3.7 230/460 Top
SEW-Eurodrive www.seweurodrive.com Movimot 0.37-1.5 380-500 Top Siemens A&D www.ad.siemens.de Combimaster 0.37-7.5 230/380 (460-500) Top SpangPowerElectronics www.spangpower.com SPE100 0.19-1.5 115/230 Top TB Wood's www.tbwoods.com IMD 0.37-3.7 200-230 (380-460 Axial VEM Motors www.vem-group.com CompactDrive 0.55-22 380-480 Top WEG Electric www.wegelectric.com MotorDrive 0.37-3.7 230/380 (480 ) Top
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 37/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.3. Net NC / Local NC 7.3.1. Caractéristiques 7.3.1.1. Etablies La notion de Net-NC ou commande numérique distribuée induit d'emblée: • réduction du coût total de possession TCO de 20 à 30%. • réduction de la durée du travail de câblage, jusqu'à 85%. • réduction de la taille des armoires électriques, jusqu'à 70%. • sécurité intrinsèque locale conforme à la norme EN 954-1, Cat.3. • amélioration drastique de la flexibilité et de la modularité des éléments en charge du "motion control". • amélioration de la précision de conduite des trajectoires d'un facteur 100 (rétroaction en 10µs et plus en 1ms). 7.3.1.2. Probables Pour que cette notion de Net-NC progresse, elle devra offrir les caractéristiques supplémentaires suivantes: • indifférenciation définitive entre "motion control" et "process control". • communication temps réel sur base Ethernet RJ45 (SERCOS III, ProfiNet, EtherCAT, PowerLink, ...). • solution compacte, modulaire et décentralisée permettant d'adresser au moins 64 nœuds communicants. • capacité de synchronisation "forte" jusqu'à 7 systèmes asservis, type de sous-réseau virtuel. • adoption complète des standards de programmation IEC-61131 et IEC-61512. • réduction du surcoût initial lié à la technologie ampli-moteur-codeur intégré. 7.3.1.3. Supposées La notion de commande numérique distribuée "Net NC" induit une collection de commandes numériques délocalisées ou "Local NC". Ces "petites" commandes numériques seront capables de gérer complètement (interprétation-interpolation-synchronisation) jusqu'à environ 7 systèmes asservis (axes + broches) et jusqu'à environ 32 entrées-sorties numériques. Une des alternatives consisterait à déporter et à réduire un NC traditionnelle en une collection de "Micro NC" se chargeant chacune d'un ensemble mécanique cohérent tel un poste complet de machine Multi-broches ou une station de contre-opération pour une machine mono-broche. L'autre alternative consisterait à "charger" un des ampli-moteur-codeurs du rôle de "Local NC"; ce maître ampli-moteur-codeur recevrait les instructions "ISO segmenté" (fragments d'ISO customisé) en provenance de l'assistant de programmation (Visual Editor); son module d'"interprépolation" se chargerait alors d'interpréter à la volée ces codes ISO segmenté, de dispatcher les consignes de positions et de vitesses à ses ampli-moteur-codeurs "esclaves" par le "fieldbus", d'acquérir toutes les informations indiquant ou non le bon déroulement du processus (températures, vibrations, pressions, bruits, courants consommées, palpeurs, caméras, etc...), de calculer les contre-mesures adéquates et tout cela en parfaite coordination avec les ampli-moteur-codeurs "esclaves" et périphériques spécialisées (sondes, pompes, filtres, ravitailleurs, convoyeurs, robots, etc...). 7.3.2. Technologies 7.3.2.1. Sécurité intrinsèque locale Par essence, l'architecture distribuée induit un temps de réaction plus rapide et des fonctions de sécurité disponible au plus près du contrôleurs/actuateurs sans détours par la commande numérique. Cela augmente la fiabilité, permet d'économiser sur les composants supplémentaires de surveillance et réduit les coûts d'installation et d'efforts; un module qui a été certifié une fois peut être réutilisé sans requérir une nouvelle certification, ce n'est évidemment pas le cas avec une architecture centralisée pour laquelle une recertification globale devrait être réalisée chaque fois qu'un élément est ajouté ou modifié. Les amplificateurs embarqués profitent du meilleur de la technologie actuelle en matière de sécurité: • sécurité intrinsèque locale conforme à la norme EN 954-1, Cat.3. • Temps de réaction inférieur à 2ms du fait du monitoring interne. • Autonomie totale ne nécessitant aucun élément ou senseur additionnel. • n'importe quelle fonction supplémentaire "haut-niveau" peut être ajoutée ultérieurement. • aucun délai critique pour les fonctions de sécurité induit par une centralisation du process (Automate).

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 38/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.3.2.2. Network / Fieldbus The open powerful protocol SERCOS III meets the needs of todays's industrial automation solutions. It combines the advantages of standard Ethernet with the real-time-precision of industrial automation technology. SERCOS III has a robust, clearly-defined data structure SERCOS III is based on standardized communication and data structure. Only one protocol for Real-time and IP-communication. The powerful SERCOS III protocol combines real-time and standard IP-communication. Clearly defined and robust data structure The SERCOS III is easy, transparent and robust. Master/Slave cross communication
Real-time data, IP communication and cycle time
Safety included – CIP Safety on SERCOS has been certified for compliance to IEC 61508 up to SIL 3. There is no need for an additional safety bus, because the safety information is sent in addition to the standard data on the SERCOS interface network in real time. The combination of drives, peripherals, safety bus and standard Ethernet in a single network simplifies handling and reduces hardware and installation costs, and it makes it easy to deploy integrated safety controllers and homogeneous safety solutions.
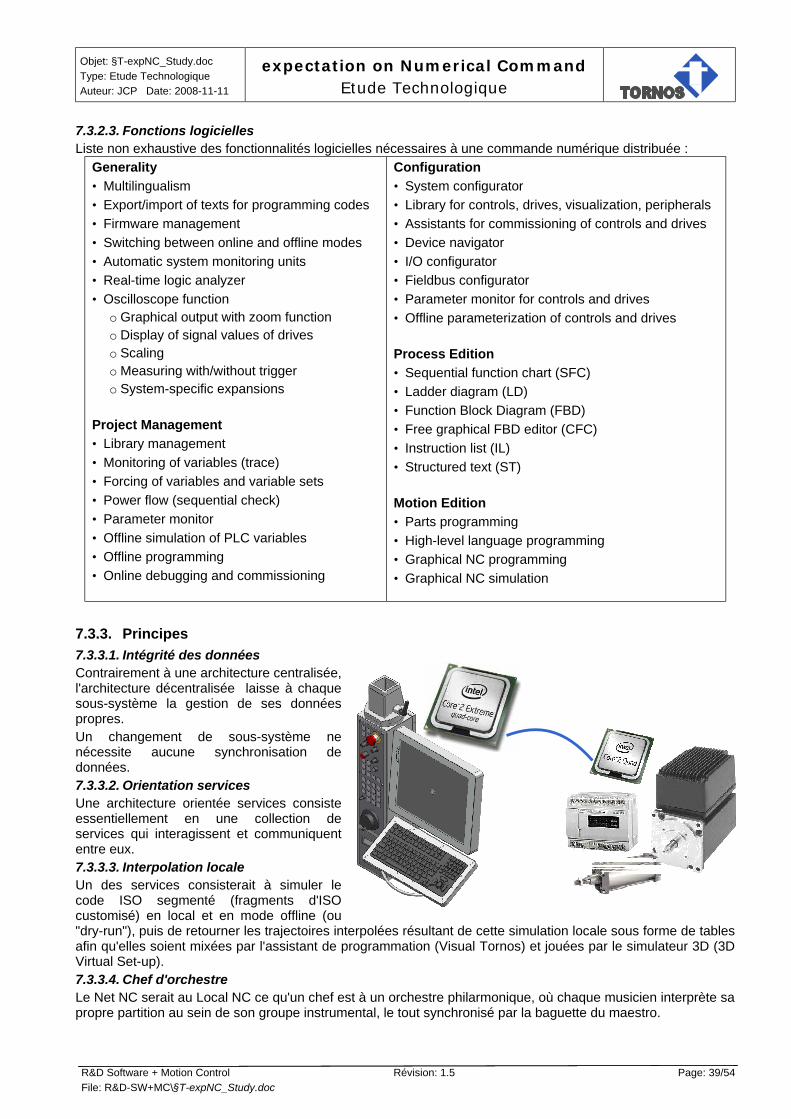
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 39/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.3.2.3. Fonctions logicielles Liste non exhaustive des fonctionnalités logicielles nécessaires à une commande numérique distribuée :
Generality • Multilingualism • Export/import of texts for programming codes • Firmware management • Switching between online and offline modes • Automatic system monitoring units • Real-time logic analyzer • Oscilloscope function
o Graphical output with zoom function o Display of signal values of drives o Scaling o Measuring with/without trigger o System-specific expansions
Project Management • Library management • Monitoring of variables (trace) • Forcing of variables and variable sets • Power flow (sequential check) • Parameter monitor • Offline simulation of PLC variables • Offline programming • Online debugging and commissioning
Configuration • System configurator • Library for controls, drives, visualization, peripherals • Assistants for commissioning of controls and drives • Device navigator • I/O configurator • Fieldbus configurator • Parameter monitor for controls and drives • Offline parameterization of controls and drives Process Edition • Sequential function chart (SFC) • Ladder diagram (LD) • Function Block Diagram (FBD) • Free graphical FBD editor (CFC) • Instruction list (IL) • Structured text (ST) Motion Edition • Parts programming • High-level language programming • Graphical NC programming • Graphical NC simulation
7.3.3. Principes 7.3.3.1. Intégrité des données Contrairement à une architecture centralisée, l'architecture décentralisée laisse à chaque sous-système la gestion de ses données propres. Un changement de sous-système ne nécessite aucune synchronisation de données. 7.3.3.2. Orientation services Une architecture orientée services consiste essentiellement en une collection de services qui interagissent et communiquent entre eux. 7.3.3.3. Interpolation locale Un des services consisterait à simuler le code ISO segmenté (fragments d'ISO customisé) en local et en mode offline (ou "dry-run"), puis de retourner les trajectoires interpolées résultant de cette simulation locale sous forme de tables afin qu'elles soient mixées par l'assistant de programmation (Visual Tornos) et jouées par le simulateur 3D (3D Virtual Set-up). 7.3.3.4. Chef d'orchestre Le Net NC serait au Local NC ce qu'un chef est à un orchestre philarmonique, où chaque musicien interprète sa propre partition au sein de son groupe instrumental, le tout synchronisé par la baguette du maestro.
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 40/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.4. STEP-NC, norme ISO 14649 7.4.1. Introduction Dans le cadre de la normalisation ISO une nouvelle interface ISO 14649 a été développée pour l‘échange des informations entre les systèmes de CAO/FAO et les commandes numériques. Cette interface "STEP-NC" décrit des données orientées objet basées sur le format standard STEP. Cette norme vise à offrir une meilleure intégration et interopérabilité des données, à accroître leurs performances et à faciliter la mise au point des programmes d’usinage directement sur la machine. Cette programmation procure des données mieux structurées pour le traitement des opérations technologiques et pour le suivi de la géométrie de la pièce. La définition de l’interface STEP-NC s’est déroulée en plusieurs étapes pour aboutir en 2001 sous la forme d’un projet européen (EP 29708) pour l’usinage par fraisage. La deuxième phase, STEP-NC/IMS a permis l’harmonisation du "data model" européen avec le "super model" américain et l’extension de la norme aux technologies du tournage, de l’électroérosion et de la mesure dimensionnelle. La validation de l’interface STEP-NC a été effectuée par la réalisation de scénarios de démonstration sur machine avec des logiciels prototypes utilisant le format STEP-NC et des réalisations de pièces type. Ces projets ont réuni des partenaires du monde industriel et du monde académique : Siemens(D), OSAI(I), CMS (I), AGIE-CHARMILLES (CH), Open Mind (D), Dassault (F), CADCAMation (CH), WZL (D), ISW (D), EPFL (CH), EIG (CH), CECIMO (B), AMT (CH), DaimlerChrysler (D), Volvo (S), Franci (I), Progetti (I), Derendinger (CH). 7.4.2. Restrictions actuelles La programmation ISO 6983 actuelle spécifie des ordres très élémentaires pour décrire des trajectoires et des instructions de processus; elle ne supporte pas les géométries plus complexes telles que les courbes "spline" ou les surfaces. Un programme optimisé sur une machine ne peut pas être ré-utilisé sur une autre machine sans divers traitements intermédiaires. 7.4.3. ISO 14649 vs ISO 6983 STEP-NC vise à remédier aux défauts de l’ISO 6983 ainsi qu’à tirer profit de la puissance de calcul des contrôleurs modernes. Plutôt que de spécifier COMMENT usiner (la trajectoire de l’outil), il s’agit de spécifier QUOI usiner (ex un trou, une poche), en incluant aussi les critères de qualité (tolérances, états de surface). Ceci permet d’implanter plus de fonctions "intelligentes" au niveau des commandes numériques (locales). Ainsi la structure de STEP-NC s'articule en 3 niveaux: • Hiérarchie des opérations d’usinage, Project, Workplan, Workingsteps, etc... décrit la séquence d’usinage. • Définition d’objets d’usinage (“features”), Trous, plans, profils, poches, etc... décrit quoi usiner. • Définition des opérations d’usinage, Paramètres technologiques décrit comment usiner. • Exemple de programme structuré (version texte):
#1=Project(Workplan #10); #10=Workplan(#20,#35,#71,.....); #20=Machining_workingstep( , #21(Feature),#22(Machining)); #21=Round_hole(‘Hole M6’,,,,,,,,,,,); #22=Drilling(#..(Tool),,,#..(Technology),#..(Machine_functions)); #35=Machining_workingstep(......);
• La forme texte du programme n’est pas très parlante mais les logiciels prototypes développés pour la validation de l’interface STEP-NC permettent l’affichage graphique de cette structure http://www.step-nc.org.
7.4.4. Perspectives L’interface STEP-NC n’est toutefois pas encore largement diffusée et exploitée au niveau commercial. La norme ISO 14649 est toujours en version de travail et certains aspects sont encore en discussion. L’adoption de cette nouvelle norme suppose encore beaucoup de travail; en effet, les éditeurs de FAO, comme les fabricants de commandes devront adapter leurs produits à cette nouvelle technologie (par exemple la FAO doit pouvoir écrire des fichiers au format STEP-NC et la commande doit pouvoir les lire et les exécuter). Les bénéfices semblent prometteurs car selon une étude américaine, l’utilisation de l’interface STEP-NC permettra une réduction de 35% du temps de planification en FAO, une réduction de 75% du nombre de schémas de montage CAO/FAO et à une réduction de 50% du temps machine pour les petites séries. De plus STEP-NC s’inscrit dans le contexte de l’entreprise numérique et dans la gestion globale du cycle de vie des produits (Produc Life-cycle Management). Le concept Net NC / Local NC n'est pas antinomique avec STEP-NC; la perspective d'ajouter le traitement STEP-NC dans les Local NC modernisera les interprépolateurs d'ISO-segmenté et s'inscrit bien dans le concept distribuant de plus en plus d'intelligence au plus près des éléments de commande d'une machine.
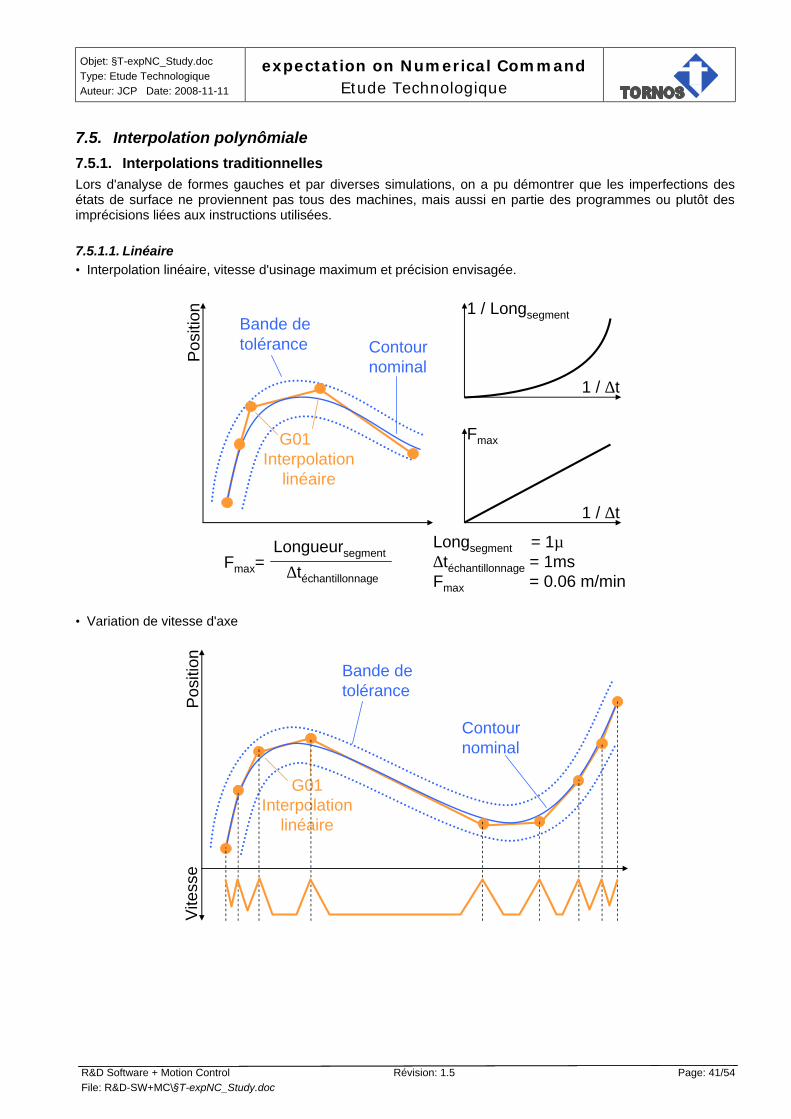
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 41/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.5. Interpolation polynômiale 7.5.1. Interpolations traditionnelles Lors d'analyse de formes gauches et par diverses simulations, on a pu démontrer que les imperfections des états de surface ne proviennent pas tous des machines, mais aussi en partie des programmes ou plutôt des imprécisions liées aux instructions utilisées. 7.5.1.1. Linéaire • Interpolation linéaire, vitesse d'usinage maximum et précision envisagée.
Bande detolérance Contour
nominal
G01 Interpolation
linéaire
Pos
ition
Fmax=Longueursegment
∆téchantillonnage
Longsegment = 1µ∆téchantillonnage = 1msFmax = 0.06 m/min
1 / Longsegment
Fmax
1 / ∆t
1 / ∆t
• Variation de vitesse d'axe
Bande detolérance
Contournominal
G01Interpolation
linéaire
Pos
ition
Vite
sse
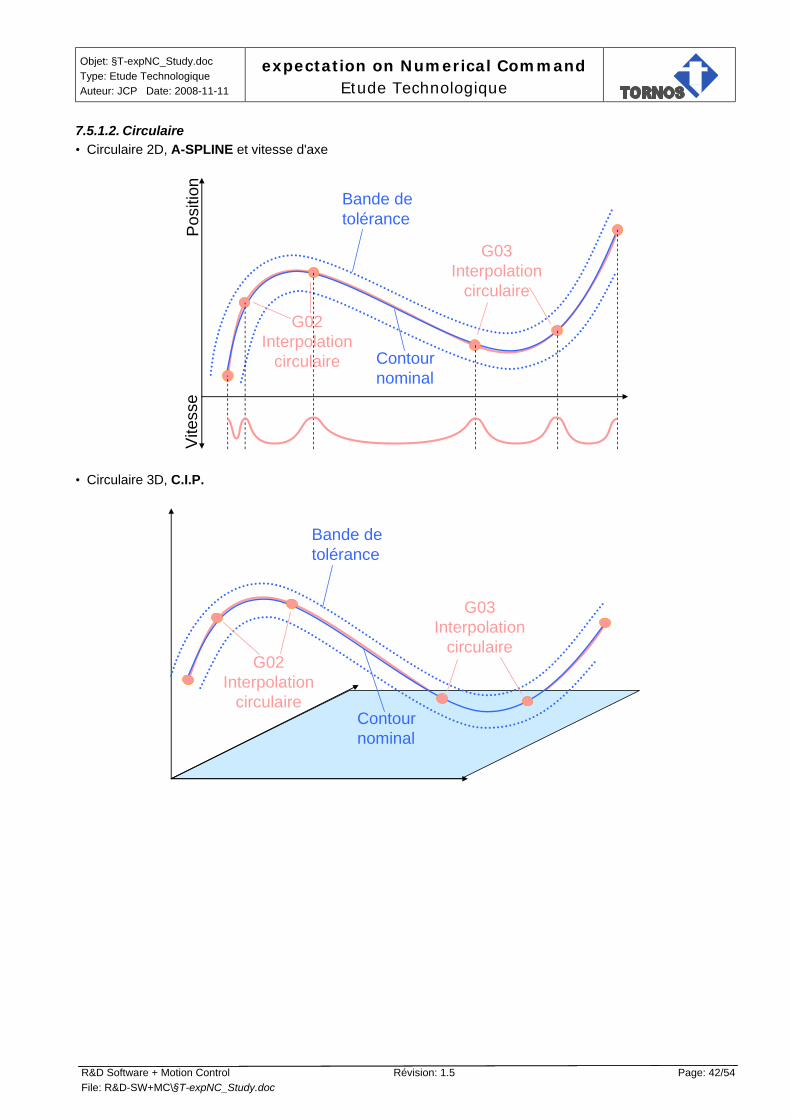
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 42/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.5.1.2. Circulaire • Circulaire 2D, A-SPLINE et vitesse d'axe
Bande detolérance
Contournominal
G03Interpolation
circulaire
G02Interpolation
circulaire
Pos
ition
Vite
sse
• Circulaire 3D, C.I.P.
Bande detolérance
Contournominal
G03Interpolation
circulaireG02
Interpolationcirculaire

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 43/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.5.2. Interpolation polynômiale • Polynômiale 3D, NURBS ou B-SPLINE
Contournominal
Polynôme du5ième degré
• Polynôme du 5ième degré et vitesse d'axe
Pos
ition
Vite
sse
Contournominal
Polynôme du5ième degré
• Afin d'éviter l'excitation des oscillations au sein d'une cinématique, certains constructeurs de machine-outil utilisent des polynômes du 5ième degré qui permettent d'obtenir une accélération constante lors des changements de directions optimisant ainsi l'état de surface; la vitesse et la précision de l'interpolation peuvent être paramétrées directement dans les ampli-moteur-codeurs en fonctions des cinématiques.
• Ce procédé induit de créer des blocs de polynômes enchaînés sans à-coups de vitesse et donc sans
accélération brutale. L'interpolation par les polynômes du 5ième degré élimine la facettisation des trajectoires améliorant ainsi la qualité des surfaces.
• Convertir un modèle de pièce dont les formes existent mathématiquement dans un logiciel de FAO en
trajectoires d'axes de machine-outil modélisées par des polynômes du 5ième degré semble prometteur.
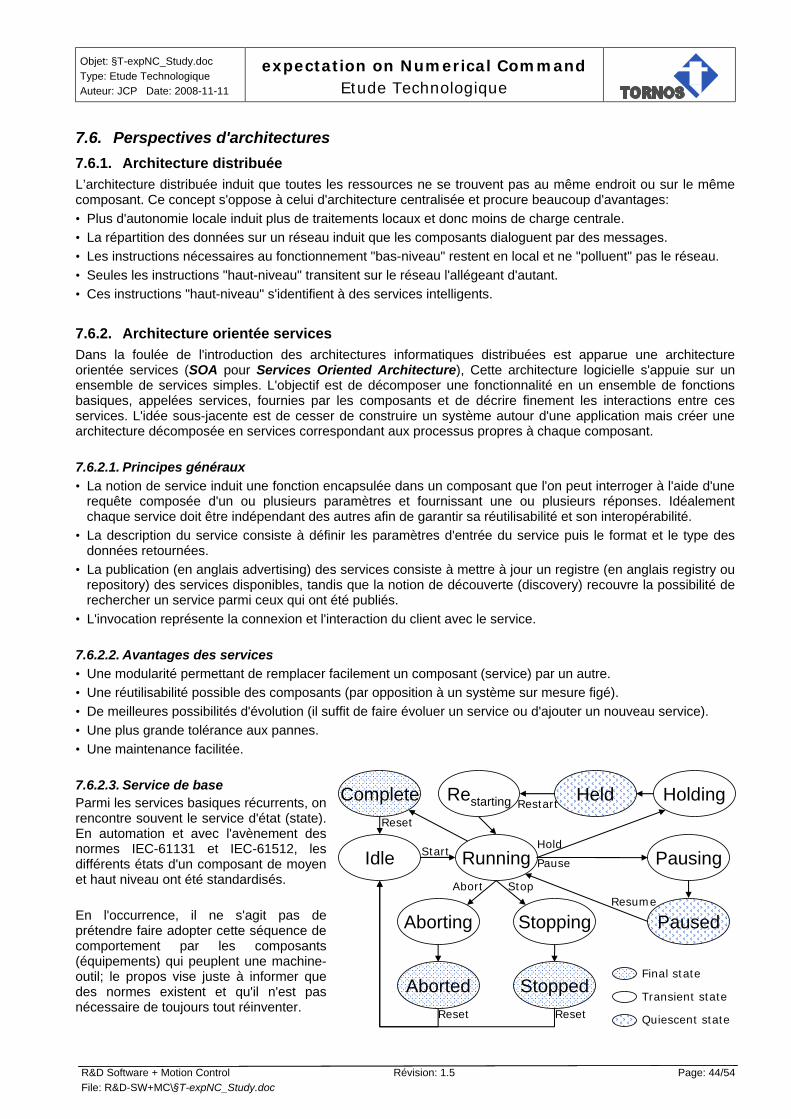
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 44/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.6. Perspectives d'architectures 7.6.1. Architecture distribuée L’architecture distribuée induit que toutes les ressources ne se trouvent pas au même endroit ou sur le même composant. Ce concept s'oppose à celui d'architecture centralisée et procure beaucoup d'avantages: • Plus d'autonomie locale induit plus de traitements locaux et donc moins de charge centrale. • La répartition des données sur un réseau induit que les composants dialoguent par des messages. • Les instructions nécessaires au fonctionnement "bas-niveau" restent en local et ne "polluent" pas le réseau. • Seules les instructions "haut-niveau" transitent sur le réseau l'allégeant d'autant. • Ces instructions "haut-niveau" s'identifient à des services intelligents. 7.6.2. Architecture orientée services Dans la foulée de l'introduction des architectures informatiques distribuées est apparue une architecture orientée services (SOA pour Services Oriented Architecture), Cette architecture logicielle s'appuie sur un ensemble de services simples. L'objectif est de décomposer une fonctionnalité en un ensemble de fonctions basiques, appelées services, fournies par les composants et de décrire finement les interactions entre ces services. L'idée sous-jacente est de cesser de construire un système autour d'une application mais créer une architecture décomposée en services correspondant aux processus propres à chaque composant. 7.6.2.1. Principes généraux • La notion de service induit une fonction encapsulée dans un composant que l'on peut interroger à l'aide d'une
requête composée d'un ou plusieurs paramètres et fournissant une ou plusieurs réponses. Idéalement chaque service doit être indépendant des autres afin de garantir sa réutilisabilité et son interopérabilité.
• La description du service consiste à définir les paramètres d'entrée du service puis le format et le type des données retournées.
• La publication (en anglais advertising) des services consiste à mettre à jour un registre (en anglais registry ou repository) des services disponibles, tandis que la notion de découverte (discovery) recouvre la possibilité de rechercher un service parmi ceux qui ont été publiés.
• L'invocation représente la connexion et l'interaction du client avec le service. 7.6.2.2. Avantages des services • Une modularité permettant de remplacer facilement un composant (service) par un autre. • Une réutilisabilité possible des composants (par opposition à un système sur mesure figé). • De meilleures possibilités d'évolution (il suffit de faire évoluer un service ou d'ajouter un nouveau service). • Une plus grande tolérance aux pannes. • Une maintenance facilitée. 7.6.2.3. Service de base Parmi les services basiques récurrents, on rencontre souvent le service d'état (state). En automation et avec l'avènement des normes IEC-61131 et IEC-61512, les différents états d'un composant de moyen et haut niveau ont été standardisés. En l'occurrence, il ne s'agit pas de prétendre faire adopter cette séquence de comportement par les composants (équipements) qui peuplent une machine-outil; le propos vise juste à informer que des normes existent et qu'il n'est pas nécessaire de toujours tout réinventer.
Complete
Idle Running
Aborted Stopped
StoppingAborting
Restarting Held Holding
Pausing
Paused
Reset
Start
Reset Reset
Abort Stop
Hold
Pause
Resume
Restart
Final state
Transient state
Quiescent state
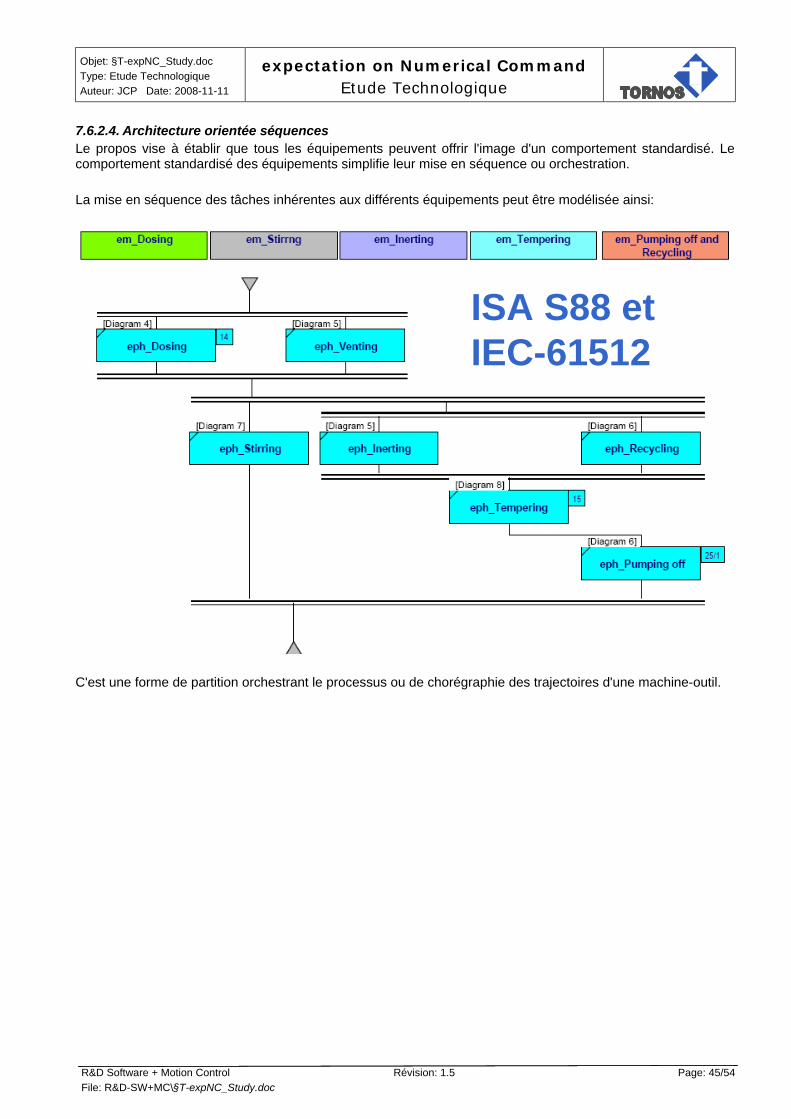
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 45/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.6.2.4. Architecture orientée séquences Le propos vise à établir que tous les équipements peuvent offrir l'image d'un comportement standardisé. Le comportement standardisé des équipements simplifie leur mise en séquence ou orchestration. La mise en séquence des tâches inhérentes aux différents équipements peut être modélisée ainsi:
ISA S88 et IEC-61512
C'est une forme de partition orchestrant le processus ou de chorégraphie des trajectoires d'une machine-outil.
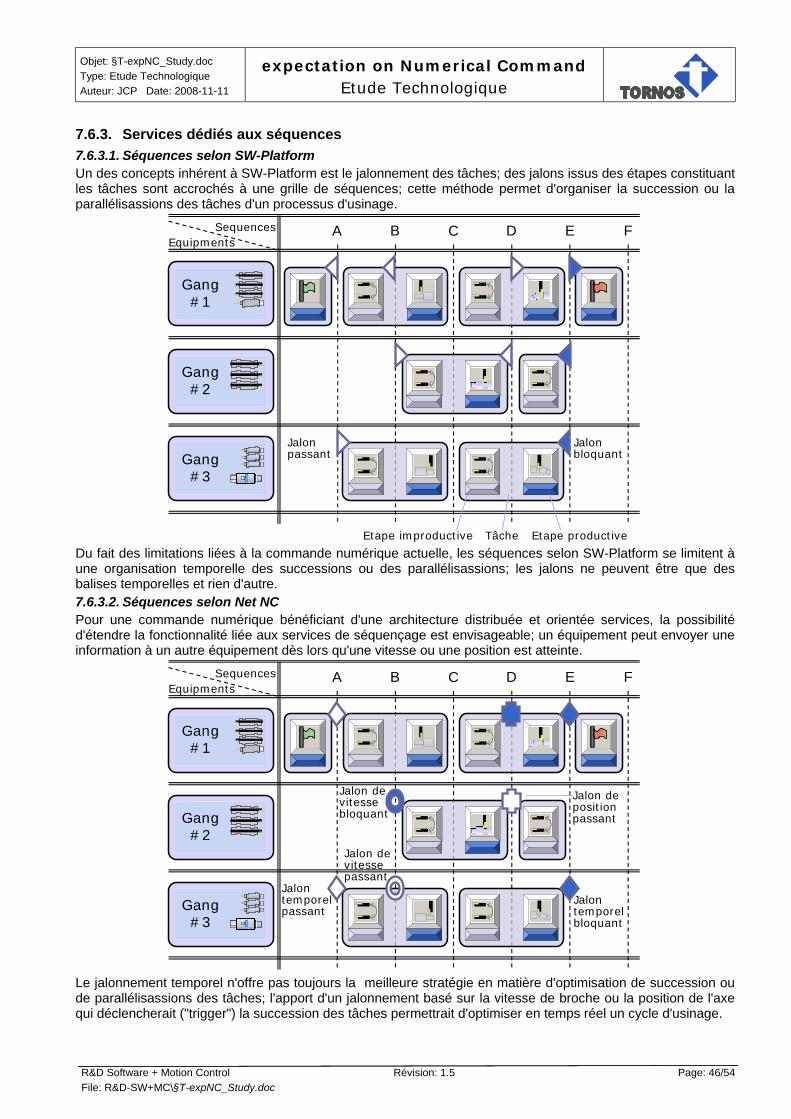
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 46/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.6.3. Services dédiés aux séquences 7.6.3.1. Séquences selon SW-Platform Un des concepts inhérent à SW-Platform est le jalonnement des tâches; des jalons issus des étapes constituant les tâches sont accrochés à une grille de séquences; cette méthode permet d'organiser la succession ou la parallélisassions des tâches d'un processus d'usinage.
A B C D ESequences
Gang#1
Gang#2
Gang#3
EquipmentsF
Tâche Etape productiveEtape improductive
Jalonpassant
Jalonbloquant
Du fait des limitations liées à la commande numérique actuelle, les séquences selon SW-Platform se limitent à une organisation temporelle des successions ou des parallélisassions; les jalons ne peuvent être que des balises temporelles et rien d'autre. 7.6.3.2. Séquences selon Net NC Pour une commande numérique bénéficiant d'une architecture distribuée et orientée services, la possibilité d'étendre la fonctionnalité liée aux services de séquençage est envisageable; un équipement peut envoyer une information à un autre équipement dès lors qu'une vitesse ou une position est atteinte.
A B C D ESequences
Gang#1
Gang#2
Gang#3
EquipmentsF
Jalontemporelpassant
Jalontemporelbloquant
Jalon devitessebloquant
Jalon devitessepassant
Jalon depositionpassant
Le jalonnement temporel n'offre pas toujours la meilleure stratégie en matière d'optimisation de succession ou de parallélisassions des tâches; l'apport d'un jalonnement basé sur la vitesse de broche ou la position de l'axe qui déclencherait ("trigger") la succession des tâches permettrait d'optimiser en temps réel un cycle d'usinage.
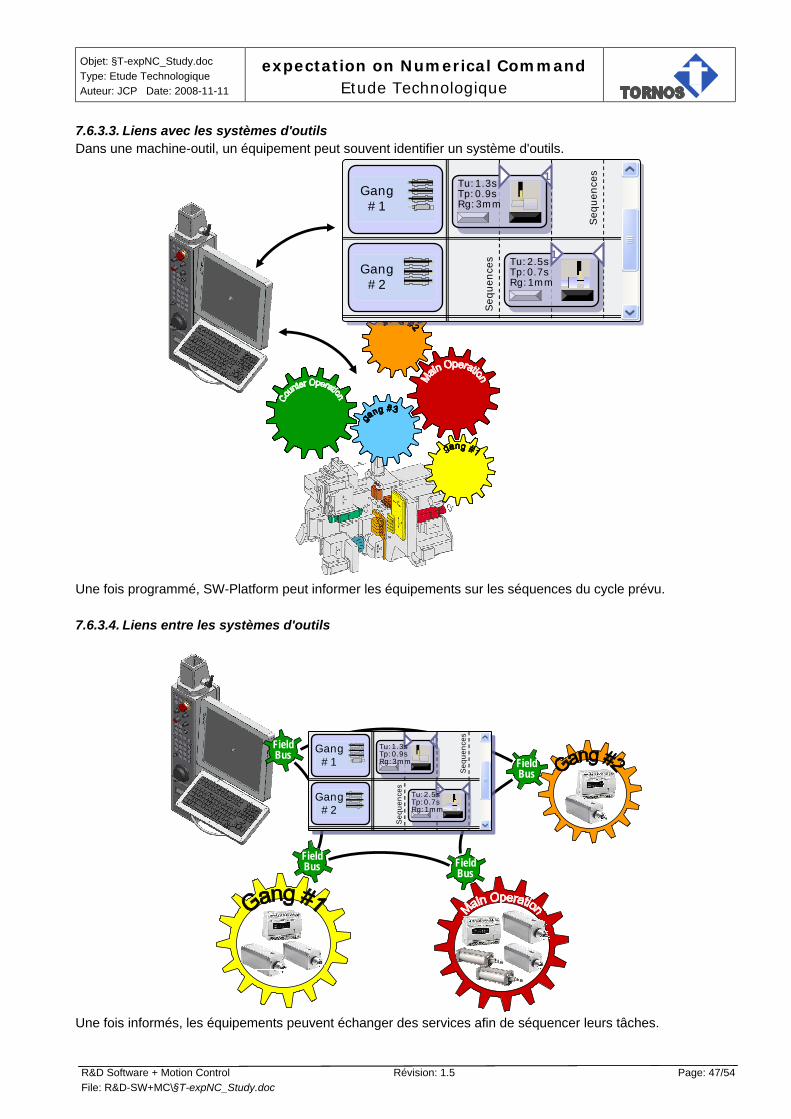
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 47/54 File: R&D-SW+MC\§T-expNC_Study.doc
7.6.3.3. Liens avec les systèmes d'outils Dans une machine-outil, un équipement peut souvent identifier un système d'outils.
1
1
Gang#1
Gang#2
Tu:1.3sTp:0.9sRg:3mm
Tu:2.5sTp:0.7sRg:1mm
Seq
uen
ces
Seq
uen
ces
Une fois programmé, SW-Platform peut informer les équipements sur les séquences du cycle prévu. 7.6.3.4. Liens entre les systèmes d'outils
FieldBus
FieldBus
FieldBus Field
Bus
1
1
Gang#1
Gang#2
Tu:1.3sTp:0.9sRg:3mm
Tu:2.5sTp:0.7sRg:1mm
Seq
uen
ces
Seq
uen
ces
1
1
Gang#1
Gang#2
Tu:1.3sTp:0.9sRg:3mm
Tu:2.5sTp:0.7sRg:1mm
Seq
uen
ces
Seq
uen
ces
Une fois informés, les équipements peuvent échanger des services afin de séquencer leurs tâches.
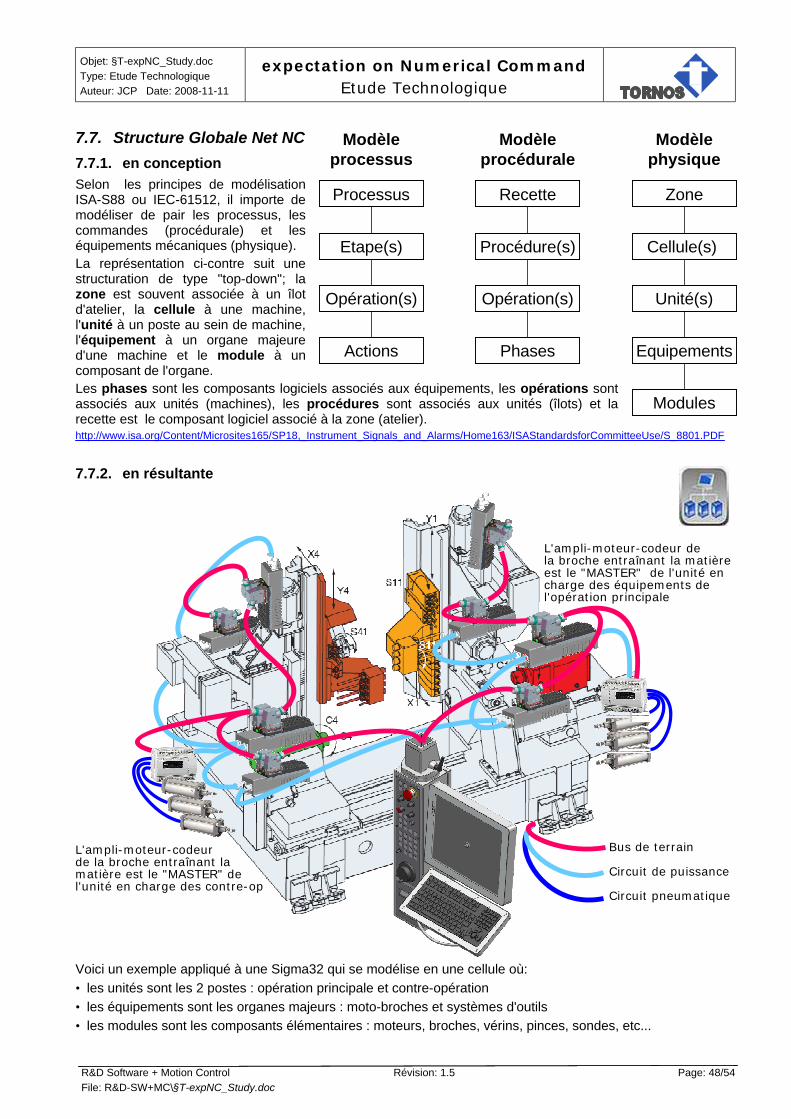
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 48/54 File: R&D-SW+MC\§T-expNC_Study.doc
Unité(s)
Zone
Cellule(s)
Equipements
Modules
Modèlephysique
Modèleprocédurale
Opération(s)
Recette
Procédure(s)
Phases
Opération(s)
Processus
Etape(s)
Actions
Modèleprocessus
7.7. Structure Globale Net NC 7.7.1. en conception Selon les principes de modélisation ISA-S88 ou IEC-61512, il importe de modéliser de pair les processus, les commandes (procédurale) et les équipements mécaniques (physique). La représentation ci-contre suit une structuration de type "top-down"; la zone est souvent associée à un îlot d'atelier, la cellule à une machine, l'unité à un poste au sein de machine, l'équipement à un organe majeure d'une machine et le module à un composant de l'organe. Les phases sont les composants logiciels associés aux équipements, les opérations sont associés aux unités (machines), les procédures sont associés aux unités (îlots) et la recette est le composant logiciel associé à la zone (atelier). http://www.isa.org/Content/Microsites165/SP18,_Instrument_Signals_and_Alarms/Home163/ISAStandardsforCommitteeUse/S_8801.PDF 7.7.2. en résultante
Bus de terrain
Circuit de puissance
Circuit pneumatique
L'ampli-moteur-codeur dela broche entraînant la matièreest le "MASTER" de l'unité encharge des équipements del'opération principale
L'ampli-moteur-codeurde la broche entraînant la matière est le "MASTER" de l'unité en charge des contre-op
Voici un exemple appliqué à une Sigma32 qui se modélise en une cellule où: • les unités sont les 2 postes : opération principale et contre-opération • les équipements sont les organes majeurs : moto-broches et systèmes d'outils • les modules sont les composants élémentaires : moteurs, broches, vérins, pinces, sondes, etc...

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 49/54 File: R&D-SW+MC\§T-expNC_Study.doc
8. Synthèse La feuille de route est esquissée à partir des principes décrits dans le chapitre précédent.
8.1. Technology Roadmap
FSSBSSB
IO-link
Conf. PMC
NC Motion
Ladder ProcessC-exe advancedMacro-exe HMI
Tornos HMI 1
Fanuc HMI
Wintel / Ethernet
FSSBSSB
Profibus
NC Motion
TornosCustom 1
"Centralised"
TornosHMI 2
Wintel / Ethernet
TornosHMI 3
Sercos III ?
HSSB Wintel / Ethernet
NetHMI 1
Sercos III ?
Conf. NC Conf. NC
PMC ProcessProcess NC 1"Centralised"
TornosCustom 2
"Centralised"
ProfibusNet NC 1
"Distributed"Process &
Motion
NetCustom 3
"Distributed"
20112009 2013 2015
H M
I T
ask
Proc
ess
Task
Mot
ion
Task
Network Bus
Control HMI
Diagnostic HMI
Process Custom
Process Config.
Process Control
Process Fieldbus
Motion Config.
Motion Control
Axis Fieldbus
Spindle Fieldbus
Indu
stria
lPC
on
Mac
hine
Process NC 2"Centralised"
Motion NC 1"Centralised"
... 8.1.1.1. 2009 Il s'agit pour cette étape d'établir les bases propices aux changements à venir; du point de vue software, le projet SW-Platform induit l'adoption des meilleures techniques en matière de décentralisation, d'ouverture, d'agilité, d'expansibilité, de standardisation et de flexibilité; et du point de vue hardware, le projet GreffePC en finitions Multi ou Mono, induit l'adoption de la plateforme dite Wintel, expression qui définit un operating system MS-Windows (en l'occurrence XP embedded) sur un chipset-processeur Intel; ce hardware induit en matière de communication la compatibilité avec le réseau ethernet. Pour la commande numérique, proprement dite, il faudra encore se contenter des prestations péniblement offertes par le système Fanuc avec son modèle 30i. • développer sur la base SW-Platform les fonctions Tornos-HMI sans se substituer au Terminal Fanuc (SDF). • cesser d'investir dans les cames virtuelles PTO et orienter SW-Platform vers l'ISO segmenté. • généraliser les consoles "PC-WINTEL" à toutes les machines. 8.1.1.2. 2011 • adopter un conditionnement électrique distribué pour le process control (hormis motion control). • contrôler le processus machine (hormis motion control) depuis la console "PC-WINTEL" via un fieldBus. • développer sur la base SW-Platform les fonctions Tornos-HMI, Tornos-Custom et Process-NC. • restreindre le rôle fonctionnel de la commande Fanuc uniquement à la partie motion control. • initier un partenariat avec un fournisseur d'ampli-moteur-codeurs intégrés ouverts aux standards. 8.1.1.3. 2013 • généraliser le conditionnement électrique distribué à tous les organes machine, y compris motion control. • développer le concept Local-NC avec le partenaire fournissant les ampli-moteur-codeurs. • développer sur la base SW-Platform la fonction Motion-NC. 8.1.1.4. 2015 • développer sur la base SW-Platform les fonctions Net-HMI, Net-Custom et Net-NC. • déployer les modules commandés numériquement selon Local-NC.
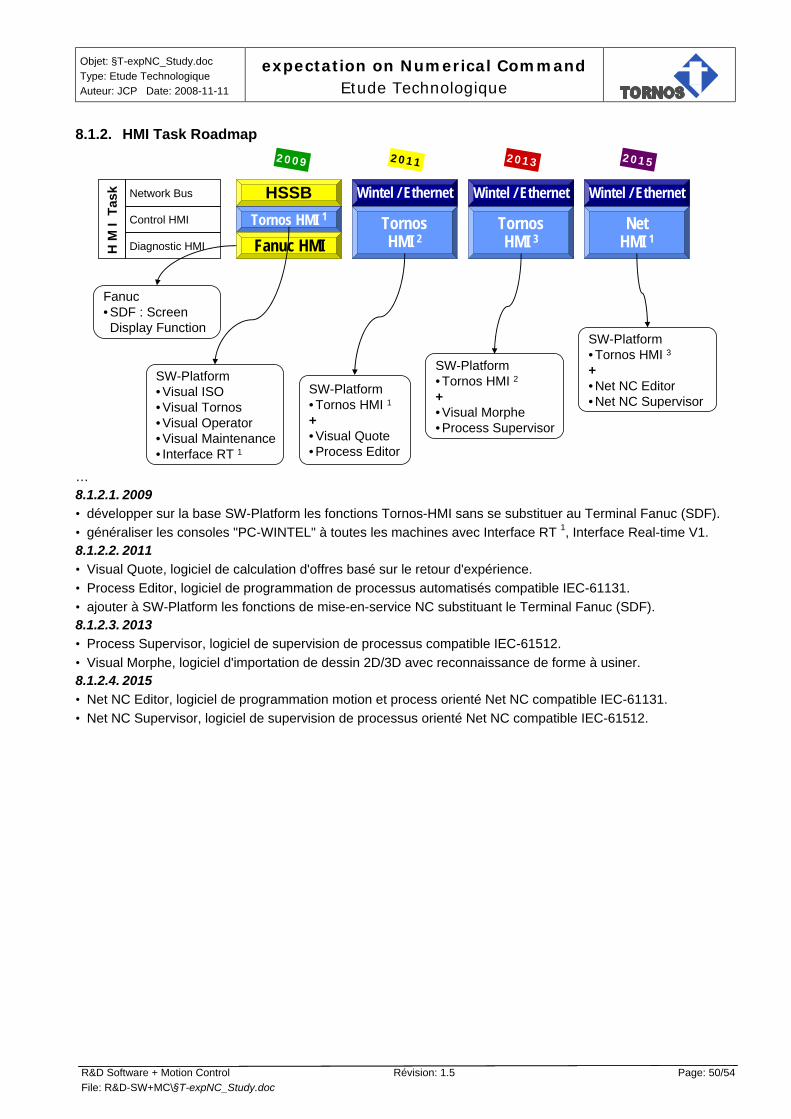
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 50/54 File: R&D-SW+MC\§T-expNC_Study.doc
8.1.2. HMI Task Roadmap
Tornos HMI 1 TornosHMI 2
TornosHMI 3
NetHMI 1
20112009 2013 2015
H M
I T
ask Network Bus
Control HMI
Diagnostic HMI
Wintel / Ethernet Wintel / EthernetHSSB Wintel / Ethernet
SW-Platform• Visual ISO• Visual Tornos• Visual Operator• Visual Maintenance• Interface RT 1
Fanuc HMI
Fanuc• SDF : ScreenDisplay Function
SW-Platform• Tornos HMI 1+• Visual Quote• Process Editor
SW-Platform• Tornos HMI 2+• Visual Morphe• Process Supervisor
SW-Platform• Tornos HMI 3+• Net NC Editor• Net NC Supervisor
… 8.1.2.1. 2009 • développer sur la base SW-Platform les fonctions Tornos-HMI sans se substituer au Terminal Fanuc (SDF). • généraliser les consoles "PC-WINTEL" à toutes les machines avec Interface RT 1, Interface Real-time V1. 8.1.2.2. 2011 • Visual Quote, logiciel de calculation d'offres basé sur le retour d'expérience. • Process Editor, logiciel de programmation de processus automatisés compatible IEC-61131. • ajouter à SW-Platform les fonctions de mise-en-service NC substituant le Terminal Fanuc (SDF). 8.1.2.3. 2013 • Process Supervisor, logiciel de supervision de processus compatible IEC-61512. • Visual Morphe, logiciel d'importation de dessin 2D/3D avec reconnaissance de forme à usiner. 8.1.2.4. 2015 • Net NC Editor, logiciel de programmation motion et process orienté Net NC compatible IEC-61131. • Net NC Supervisor, logiciel de supervision de processus orienté Net NC compatible IEC-61512.
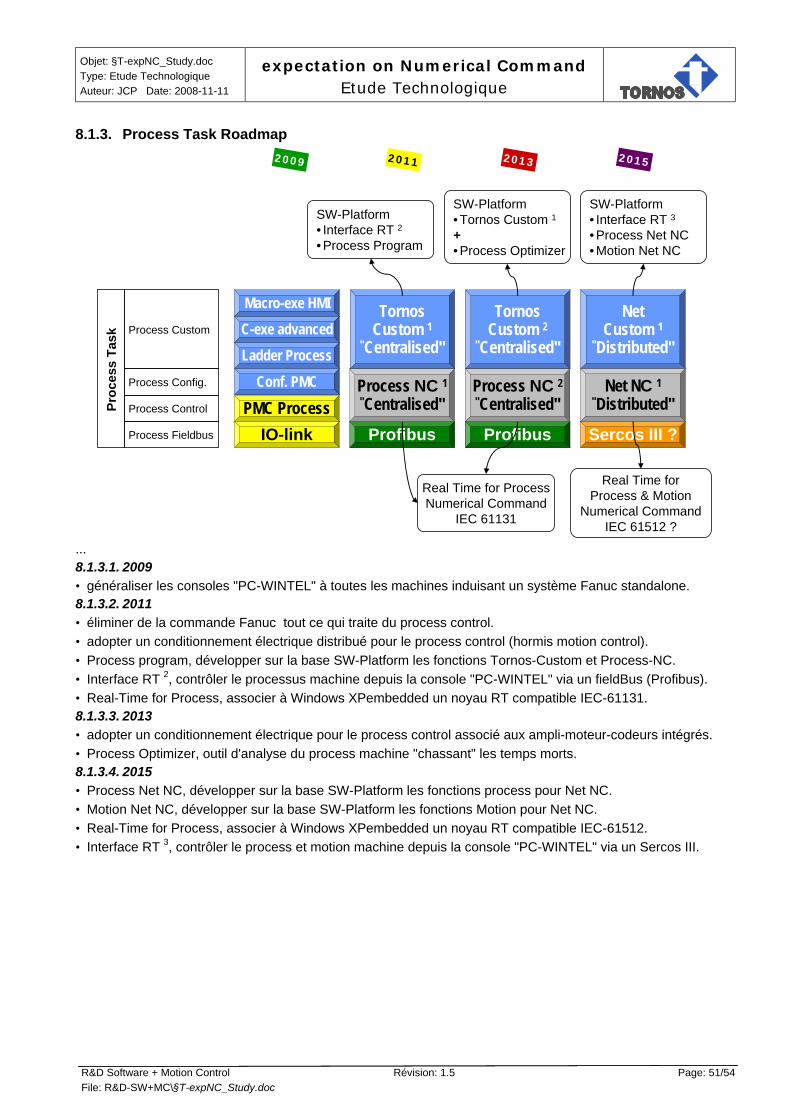
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 51/54 File: R&D-SW+MC\§T-expNC_Study.doc
8.1.3. Process Task Roadmap
TornosCustom 1
"Centralised"
Sercos III ?
TornosCustom 2
"Centralised"
NetCustom 1
"Distributed"
20112009 2013 2015
Proc
ess
Task Process Custom
Process Config.
Process Control
Process Fieldbus ProfibusProfibusIO-link
Conf. PMC
Ladder ProcessC-exe advancedMacro-exe HMI
PMC Process
SW-Platform• Interface RT 2• Process Program
SW-Platform• Tornos Custom 1+• Process Optimizer
SW-Platform• Interface RT 3• Process Net NC• Motion Net NC
Real Time for ProcessNumerical Command
IEC 61131
Real Time forProcess & Motion
Numerical CommandIEC 61512 ?
Process NC 1"Centralised"
Process NC 2"Centralised"
Net NC 1"Distributed"
... 8.1.3.1. 2009 • généraliser les consoles "PC-WINTEL" à toutes les machines induisant un système Fanuc standalone. 8.1.3.2. 2011 • éliminer de la commande Fanuc tout ce qui traite du process control. • adopter un conditionnement électrique distribué pour le process control (hormis motion control). • Process program, développer sur la base SW-Platform les fonctions Tornos-Custom et Process-NC. • Interface RT 2, contrôler le processus machine depuis la console "PC-WINTEL" via un fieldBus (Profibus). • Real-Time for Process, associer à Windows XPembedded un noyau RT compatible IEC-61131. 8.1.3.3. 2013 • adopter un conditionnement électrique pour le process control associé aux ampli-moteur-codeurs intégrés. • Process Optimizer, outil d'analyse du process machine "chassant" les temps morts. 8.1.3.4. 2015 • Process Net NC, développer sur la base SW-Platform les fonctions process pour Net NC. • Motion Net NC, développer sur la base SW-Platform les fonctions Motion pour Net NC. • Real-Time for Process, associer à Windows XPembedded un noyau RT compatible IEC-61512. • Interface RT 3, contrôler le process et motion machine depuis la console "PC-WINTEL" via un Sercos III.
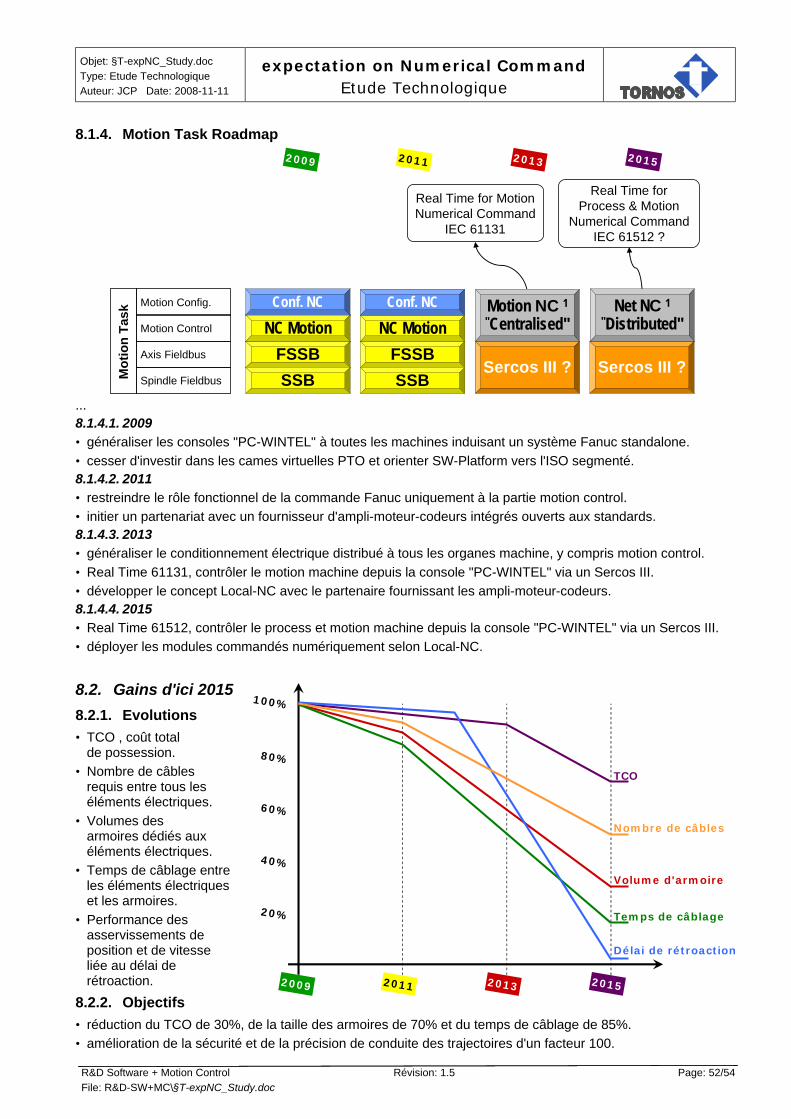
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 52/54 File: R&D-SW+MC\§T-expNC_Study.doc
8.1.4. Motion Task Roadmap
Sercos III ? Sercos III ?
20112009 2013 2015
Mot
ion
Task
Motion Config.
Motion Control
Axis Fieldbus
Spindle Fieldbus
FSSBSSB
NC MotionConf. NC Motion NC 1
"Centralised"Net NC 1
"Distributed"
Real Time for MotionNumerical Command
IEC 61131
Real Time forProcess & Motion
Numerical CommandIEC 61512 ?
FSSBSSB
NC MotionConf. NC
... 8.1.4.1. 2009 • généraliser les consoles "PC-WINTEL" à toutes les machines induisant un système Fanuc standalone. • cesser d'investir dans les cames virtuelles PTO et orienter SW-Platform vers l'ISO segmenté. 8.1.4.2. 2011 • restreindre le rôle fonctionnel de la commande Fanuc uniquement à la partie motion control. • initier un partenariat avec un fournisseur d'ampli-moteur-codeurs intégrés ouverts aux standards. 8.1.4.3. 2013 • généraliser le conditionnement électrique distribué à tous les organes machine, y compris motion control. • Real Time 61131, contrôler le motion machine depuis la console "PC-WINTEL" via un Sercos III. • développer le concept Local-NC avec le partenaire fournissant les ampli-moteur-codeurs. 8.1.4.4. 2015 • Real Time 61512, contrôler le process et motion machine depuis la console "PC-WINTEL" via un Sercos III. • déployer les modules commandés numériquement selon Local-NC.
8.2. Gains d'ici 2015 8.2.1. Evolutions • TCO , coût total
de possession. • Nombre de câbles
requis entre tous les éléments électriques.
• Volumes des armoires dédiés aux éléments électriques.
• Temps de câblage entre les éléments électriques et les armoires.
• Performance des asservissements de position et de vitesse liée au délai de rétroaction.
8.2.2. Objectifs • réduction du TCO de 30%, de la taille des armoires de 70% et du temps de câblage de 85%. • amélioration de la sécurité et de la précision de conduite des trajectoires d'un facteur 100.
20112009 2013 2015
100%
80%
60%
40%
20%
Délai de rétroaction
Temps de câblage
Volume d'armoire
TCO
Nombre de câbles

Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 53/54 File: R&D-SW+MC\§T-expNC_Study.doc
Index 1. OBJET...............................................................................................................................................2
1.1. NOM.......................................................................................................................................................... 2 1.2. DESCRIPTION ........................................................................................................................................... 2 1.3. DOMAINE.................................................................................................................................................. 2 1.4. LIENS........................................................................................................................................................ 2
1.4.1. Références ...........................................................................................................................................................................2 1.4.2. Issues ...................................................................................................................................................................................2
1.5. INTERVENANTS / CONTACTS .................................................................................................................... 2 1.6. RESPONSABILITES & HISTORIQUES ........................................................................................................ 2
2. SOMMAIRE .....................................................................................................................................3 2.1. PLAN ......................................................................................................................................................... 3
2.1.1. Fonction...............................................................................................................................................................................3 2.1.2. Principes..............................................................................................................................................................................3 2.1.3. Architectures .......................................................................................................................................................................3 2.1.4. Déploiements.......................................................................................................................................................................3 2.1.5. Solution ...............................................................................................................................................................................3 2.1.6. Synthèse ..............................................................................................................................................................................3
2.2. RECOMMANDATIONS................................................................................................................................ 3 2.2.1. A court terme.......................................................................................................................................................................3 2.2.2. A moyen terme ....................................................................................................................................................................3 2.2.3. A long terme........................................................................................................................................................................3
2.3. GAINS D'ICI 2015...................................................................................................................................... 3 3. FONCTION ......................................................................................................................................4
3.1. MACHINE A COMMANDE NUMERIQUE ..................................................................................................... 4 3.1.1. Définition ............................................................................................................................................................................4 3.1.2. Généralités...........................................................................................................................................................................4 3.1.3. Origines de la commande numérique ..................................................................................................................................4 3.1.4. La structure d'une machine à commande numérique ...........................................................................................................4
3.2. PROGRAMMATION DE COMMANDE NUMERIQUE...................................................................................... 5 3.2.1. Langage ...............................................................................................................................................................................5 3.2.2. Les familles de codes ..........................................................................................................................................................5 3.2.3. Les codes. ............................................................................................................................................................................6 3.2.4. Common Fanuc G Codes.....................................................................................................................................................7 3.2.5. Codes CNC ISO de base......................................................................................................................................................7 3.2.6. Fonctions préparatoires G....................................................................................................................................................8 3.2.7. Fonctions auxiliaires M .......................................................................................................................................................8 3.2.8. Axes (référentiels) ...............................................................................................................................................................8 3.2.9. Origines (référentiels)..........................................................................................................................................................9 3.2.10. Corrections (géométries et usures) ......................................................................................................................................9 3.2.11. Exemple typique................................................................................................................................................................10 3.2.12. Exemple d'un programme simple de tournage CNC..........................................................................................................11
4. PRINCIPES ....................................................................................................................................12 4.1. LES ALIMENTS DIGERABLES PAR UNE NC............................................................................................. 13
4.1.1. Récapitulatif ......................................................................................................................................................................13 4.1.2. Capabilité vs Complexité ..................................................................................................................................................13
4.2. ISO OU PTO ? ........................................................................................................................................ 14 4.2.1. Commandes ISO interprétées ............................................................................................................................................14 4.2.2. Cames virtuelles PTO pré-calculées..................................................................................................................................15 4.2.3. Interpréteur ISO vs Compilateur PTO...............................................................................................................................16
4.3. ISO SEGMENTE ...................................................................................................................................... 17 4.3.1. Segmenteur ISO ................................................................................................................................................................17 4.3.2. SegmCode ISO..................................................................................................................................................................18 4.3.3. Exemple ISO customisé vs ISO segmenté.........................................................................................................................19 4.3.4. Compilateur PTO vs Segmenteur ISO...............................................................................................................................20
5. ARCHITECTURES .......................................................................................................................21 5.1. DIVERSES VUES ...................................................................................................................................... 21
5.1.1. Représentation unique problématique ...............................................................................................................................21 5.1.2. Les diverses représentations choisies ................................................................................................................................21
5.2. STRUCTURE GLOBALE............................................................................................................................ 22 5.2.1. Avant .................................................................................................................................................................................22 5.2.2. Actuelle .............................................................................................................................................................................22
Objet: §T-expNC_Study.doc Type: Etude Technologique Auteur: JCP Date: 2008-11-11
expectation on Numerical Command Etude Technologique
R&D Software + Motion Control Révision: 1.5 Page: 54/54 File: R&D-SW+MC\§T-expNC_Study.doc
5.3. ARCHITECTURE CENTRALISEE ACTUELLE............................................................................................. 23 5.3.1. Vue Structurelle.................................................................................................................................................................23 5.3.2. Vue Séquentielle ...............................................................................................................................................................24 5.3.3. Vue Hiérarchique ..............................................................................................................................................................25 5.3.4. Vue Fonctionnelle .............................................................................................................................................................25
5.4. ARCHITECTURE DISTRIBUEE ................................................................................................................. 26 5.4.1. Définition ..........................................................................................................................................................................26 5.4.2. Contextes technologiques..................................................................................................................................................27 5.4.3. Vue Hiérarchique ..............................................................................................................................................................28 5.4.4. Vue Fonctionnelle .............................................................................................................................................................29 5.4.5. Vue Séquentielle ...............................................................................................................................................................29
5.5. EXEMPLE DECO13A.............................................................................................................................. 30 5.5.1. Modèle...............................................................................................................................................................................30 5.5.2. Vue Structurelle.................................................................................................................................................................30 5.5.3. Hardwares disponibles.......................................................................................................................................................31 5.5.4. Softwares disponibles........................................................................................................................................................31
6. DEPLOIEMENTS..........................................................................................................................32 6.1. CABLAGE ................................................................................................................................................ 32
6.1.1. Nombre de câbles centralisés ............................................................................................................................................32 6.1.2. Nombre de câbles distribués..............................................................................................................................................32 6.1.3. Réduction du nombre de câbles.........................................................................................................................................32
6.2. CONDITIONNEMENT ............................................................................................................................... 33 6.2.1. Armoire électrique.............................................................................................................................................................33 6.2.2. Temps de Câblage .............................................................................................................................................................33
7. SOLUTION.....................................................................................................................................34 7.1. PROCESS+MOTION ................................................................................................................................. 34 7.2. AMPLI+MOTEUR+CODEURS ................................................................................................................... 34
7.2.1. Les environnements hostiles..............................................................................................................................................35 7.2.2. Les coûts et les questions liées au marché.........................................................................................................................35 7.2.3. La mise en réseau est la clé ...............................................................................................................................................36 7.2.4. L'avenir des ampli-moteur-codeurs ...................................................................................................................................36 7.2.5. Ampli-moteur-codeurs représentatifs ................................................................................................................................36
7.3. NET NC / LOCAL NC .............................................................................................................................. 37 7.3.1. Caractéristiques .................................................................................................................................................................37 7.3.2. Technologies .....................................................................................................................................................................37 7.3.3. Principes............................................................................................................................................................................39
7.4. STEP-NC, NORME ISO 14649 ............................................................................................................... 40 7.4.1. Introduction .......................................................................................................................................................................40 7.4.2. Restrictions actuelles .........................................................................................................................................................40 7.4.3. ISO 14649 vs ISO 6983.....................................................................................................................................................40 7.4.4. Perspectives.......................................................................................................................................................................40
7.5. INTERPOLATION POLYNOMIALE............................................................................................................. 41 7.5.1. Interpolations traditionnelles .............................................................................................................................................41 7.5.2. Interpolation polynômiale .................................................................................................................................................43
7.6. PERSPECTIVES D'ARCHITECTURES ........................................................................................................ 44 7.6.1. Architecture distribuée ......................................................................................................................................................44 7.6.2. Architecture orientée services ...........................................................................................................................................44 7.6.3. Services dédiés aux séquences ..........................................................................................................................................46
7.7. STRUCTURE GLOBALE NET NC ............................................................................................................. 48 7.7.1. en conception.....................................................................................................................................................................48 7.7.2. en résultante.......................................................................................................................................................................48
8. SYNTHESE.....................................................................................................................................49 8.1. TECHNOLOGY ROADMAP........................................................................................................................ 49
8.1.2. HMI Task Roadmap ..........................................................................................................................................................50 8.1.3. Process Task Roadmap......................................................................................................................................................51 8.1.4. Motion Task Roadmap ......................................................................................................................................................52
8.2. GAINS D'ICI 2015.................................................................................................................................... 52 8.2.1. Evolutions .........................................................................................................................................................................52 8.2.2. Objectifs ............................................................................................................................................................................52





























