Embed Size (px)
Citation preview

Stevenson and OzgurFirst Edition
Stevenson and OzgurFirst Edition
Introduction to Management Science with Spreadsheets
Introduction to Management Science with Spreadsheets
McGraw-Hill/IrwinCopyright © 2007 by The McGraw-Hill Companies, Inc. All rights
reserved.
Chapter 6 SupplementChapter 6 Supplement
Transportation and Transportation and Assignment Solution Assignment Solution ProceduresProcedures

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–2
Learning ObjectivesLearning Objectives
1. Use the transportation method to solve problems manually.
2. Deal with special cases in solving transportation problems.
3. Use the assignment (Hungarian) method to solve problems manually.
4. Deal with special cases in solving assignment problems.
After completing this chapter, you should be able to:

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–3
Table 6S–1Table 6S–1 Transportation Table for Harley’s Sand and GravelTransportation Table for Harley’s Sand and GravelTable 6S–1Table 6S–1 Transportation Table for Harley’s Sand and GravelTransportation Table for Harley’s Sand and Gravel

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–4
Figure 6S–1Figure 6S–1 Overview of the Transportation MethodOverview of the Transportation MethodFigure 6S–1Figure 6S–1 Overview of the Transportation MethodOverview of the Transportation Method
Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–5
Finding an Initial Feasible Solution: Finding an Initial Feasible Solution: The Northwest-Corner MethodThe Northwest-Corner Method
Finding an Initial Feasible Solution: Finding an Initial Feasible Solution: The Northwest-Corner MethodThe Northwest-Corner Method
• The Northwest-Corner Method–is a systematic approach for developing an initial
feasible solution.–is simple to use and easy to understand.–does not take transportation costs into account.–gets its name because the starting point for the
allocation process is the upper-left-hand (northwest) corner of the transportation table.

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–6
Table 6S–2 Table 6S–2 Initial Feasible Solution for Harley Using Northwest-Corner Initial Feasible Solution for Harley Using Northwest-Corner MethodMethod
Table 6S–2 Table 6S–2 Initial Feasible Solution for Harley Using Northwest-Corner Initial Feasible Solution for Harley Using Northwest-Corner MethodMethod
Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–7
Finding an Initial Feasible Solution: Finding an Initial Feasible Solution: The Intuitive ApproachThe Intuitive Approach
Finding an Initial Feasible Solution: Finding an Initial Feasible Solution: The Intuitive ApproachThe Intuitive Approach
1. Identify the cell that has the lowest unit cost.
2. Cross out the cells in the row or column that has been exhausted (or both, if both have been exhausted), and adjust the remaining row or column total accordingly.
3. Identify the cell with the lowest cost from the remaining cells.
4. Repeat steps 2 and 3 until all supply and demand have been allocated.

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–8
Table 6S–3a Table 6S–3a Find the Cell That Has the Lowest Unit CostFind the Cell That Has the Lowest Unit CostTable 6S–3a Table 6S–3a Find the Cell That Has the Lowest Unit CostFind the Cell That Has the Lowest Unit Cost
Table 6STable 6S–3b –3b Allocate 150 Units to Cell B–2Allocate 150 Units to Cell B–2Table 6STable 6S–3b –3b Allocate 150 Units to Cell B–2Allocate 150 Units to Cell B–2

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–9
Table 6S–4 Table 6S–4 200 Units Are Assigned to Cell C–3 and 50 Units Are200 Units Are Assigned to Cell C–3 and 50 Units AreAssigned to cell A–1Assigned to cell A–1
Table 6S–4 Table 6S–4 200 Units Are Assigned to Cell C–3 and 50 Units Are200 Units Are Assigned to Cell C–3 and 50 Units AreAssigned to cell A–1Assigned to cell A–1
Table 6STable 6S–5 –5 Completion of the Initial Feasible Solution for the Harley Completion of the Initial Feasible Solution for the Harley Problem Using the Intuitive ApproachProblem Using the Intuitive Approach
Table 6STable 6S–5 –5 Completion of the Initial Feasible Solution for the Harley Completion of the Initial Feasible Solution for the Harley Problem Using the Intuitive ApproachProblem Using the Intuitive Approach

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–10
Table 6STable 6S–6–6 Vogel’s Approximation Initial Allocation Tableau with Penalty Vogel’s Approximation Initial Allocation Tableau with Penalty CostsCosts
Table 6STable 6S–6–6 Vogel’s Approximation Initial Allocation Tableau with Penalty Vogel’s Approximation Initial Allocation Tableau with Penalty CostsCosts

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–11
Table 6S–7Table 6S–7 Initial Feasible Solution Obtained Using the Northwest-Corner Initial Feasible Solution Obtained Using the Northwest-Corner MethodMethod
Table 6S–7Table 6S–7 Initial Feasible Solution Obtained Using the Northwest-Corner Initial Feasible Solution Obtained Using the Northwest-Corner MethodMethod
Table 6STable 6S–8 –8 Evaluation Path for Cell B–1Evaluation Path for Cell B–1Table 6STable 6S–8 –8 Evaluation Path for Cell B–1Evaluation Path for Cell B–1
Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–12
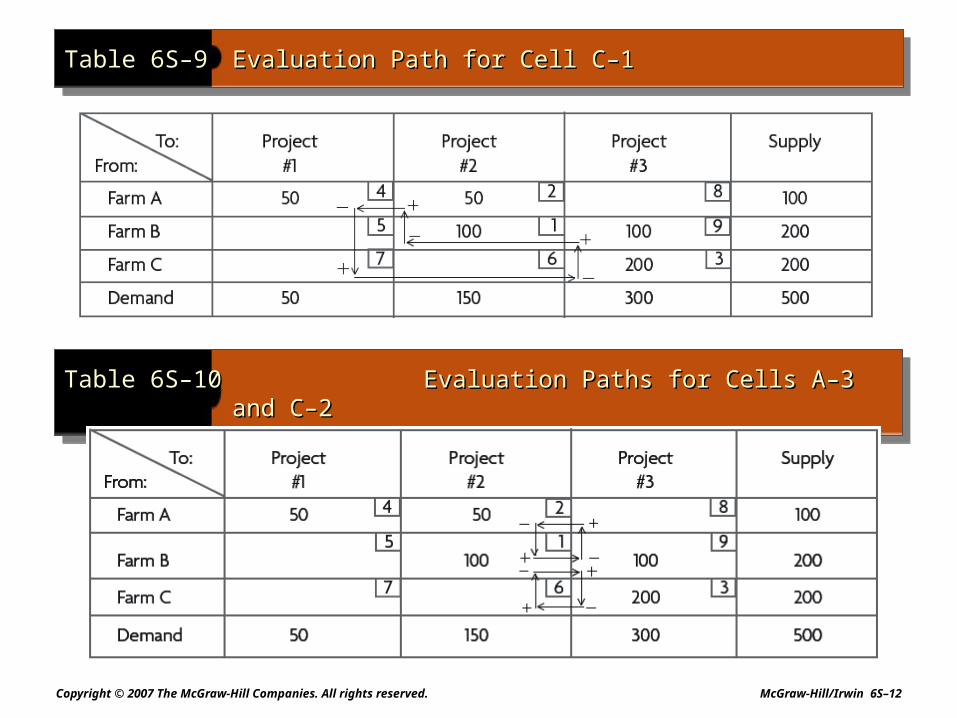
Table 6S–9Table 6S–9 Evaluation Path for Cell C–1Evaluation Path for Cell C–1Table 6S–9Table 6S–9 Evaluation Path for Cell C–1Evaluation Path for Cell C–1
Table 6STable 6S–10 –10 Evaluation Paths for Cells A–3 and C–2Evaluation Paths for Cells A–3 and C–2Table 6STable 6S–10 –10 Evaluation Paths for Cells A–3 and C–2Evaluation Paths for Cells A–3 and C–2

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–13
Table 6S–11Table 6S–11 Initial Feasible Solution Obtained Using the Northwest-Corner Initial Feasible Solution Obtained Using the Northwest-Corner MethodMethod
Table 6S–11Table 6S–11 Initial Feasible Solution Obtained Using the Northwest-Corner Initial Feasible Solution Obtained Using the Northwest-Corner MethodMethod
Evaluation Using the MODI MethodThe MODI (MOdified DIstribution) method of evaluating a transportation
solution for optimality involves the use of index numbers that are
established for the rows and columns. These are based on the unit costs of
the occupied cells. The index numbers can be used to obtain the cell
evaluations for empty cells without the use of stepping-stone paths.
Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–14
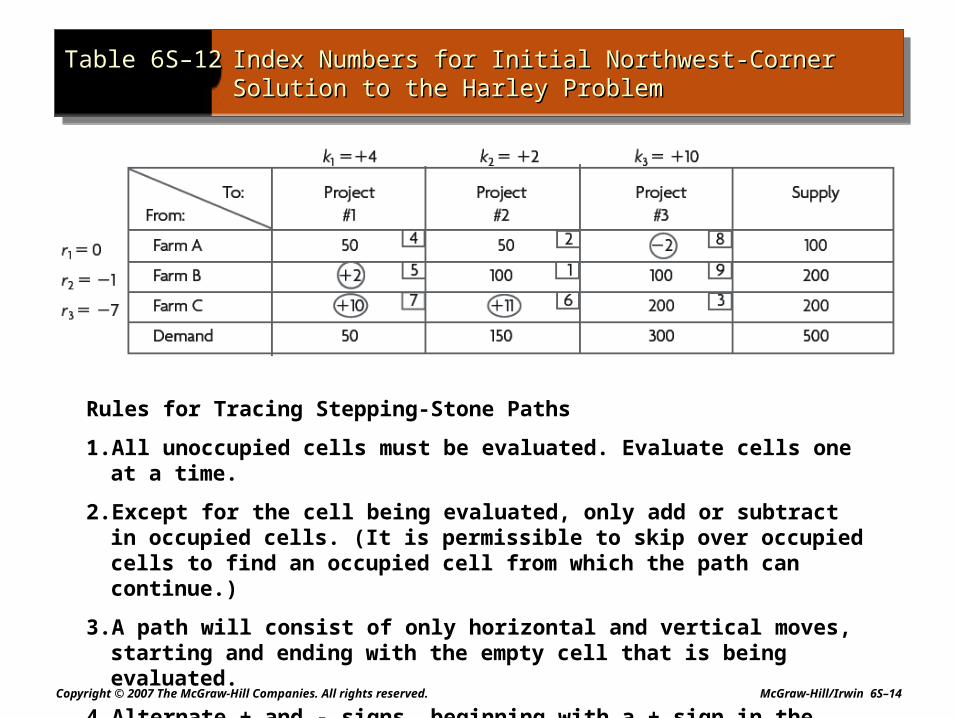
Table 6S–12Table 6S–12 Index Numbers for Initial Northwest-Corner Solution to the Index Numbers for Initial Northwest-Corner Solution to the Harley ProblemHarley Problem
Table 6S–12Table 6S–12 Index Numbers for Initial Northwest-Corner Solution to the Index Numbers for Initial Northwest-Corner Solution to the Harley ProblemHarley Problem
Rules for Tracing Stepping-Stone Paths
1. All unoccupied cells must be evaluated. Evaluate cells one at a time.
2. Except for the cell being evaluated, only add or subtract in occupied cells. (It is permissible to skip over occupied cells to find an occupied cell from which the path can continue.)
3. A path will consist of only horizontal and vertical moves, starting and ending with the empty cell that is being evaluated.
4. Alternate + and - signs, beginning with a + sign in the cell being evaluated.

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–15
Table 6S–13Table 6S–13 Cell Evaluations for Northwest-Corner Solution for the Harley Cell Evaluations for Northwest-Corner Solution for the Harley ProblemProblem
Table 6S–13Table 6S–13 Cell Evaluations for Northwest-Corner Solution for the Harley Cell Evaluations for Northwest-Corner Solution for the Harley ProblemProblem
Table 6STable 6S–14 –14 Stepping-Stone Path for Cell A–3Stepping-Stone Path for Cell A–3Table 6STable 6S–14 –14 Stepping-Stone Path for Cell A–3Stepping-Stone Path for Cell A–3

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–16
Table 6S–15Table 6S–15 Distribution Plan after Reallocation of 50 UnitsDistribution Plan after Reallocation of 50 UnitsTable 6S–15Table 6S–15 Distribution Plan after Reallocation of 50 UnitsDistribution Plan after Reallocation of 50 Units
Table 6S–16Table 6S–16 Index Numbers and Cell EvaluationsIndex Numbers and Cell EvaluationsTable 6S–16Table 6S–16 Index Numbers and Cell EvaluationsIndex Numbers and Cell Evaluations

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–17
Summary of the Transportation MethodSummary of the Transportation MethodSummary of the Transportation MethodSummary of the Transportation Method
1. Obtain an initial feasible solution. Use either the northwest-corner method, the intuitive method, or the Vogel’s approximation method. Generally, the intuitive method and Vogel’s approximation are the preferred approaches.
2. Evaluate the solution to determine if it is optimal. Use either the stepping-stone method or MODI. The solution is not optimal if any unoccupied cell has a negative cell evaluation.
3. If the solution is not optimal, select the cell that has the most negative cell evaluation. Obtain an improved solution using the stepping-stone method.
4. Repeat steps 2 and 3 until no cell evaluations (reduced costs) are negative. Once you have identified the optimal solution, compute its total cost.

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–18
Special IssuesSpecial IssuesSpecial IssuesSpecial Issues
1. Determining if there are alternate optimal solutions.
2. Recognizing and handling degeneracy (too few occupied cells to permit evaluation of a solution).
3. Avoiding unacceptable or prohibited route assignments.
4. Dealing with problems in which supply and demand are not equal.
5. Solving maximization problems.

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–19
Table 6S–17a Table 6S–17a Index Numbers and Cell EvaluationsIndex Numbers and Cell EvaluationsTable 6S–17a Table 6S–17a Index Numbers and Cell EvaluationsIndex Numbers and Cell Evaluations
Table 6S–17bTable 6S–17b Alternate Optimal SolutionAlternate Optimal SolutionTable 6S–17bTable 6S–17b Alternate Optimal SolutionAlternate Optimal Solution
Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–20
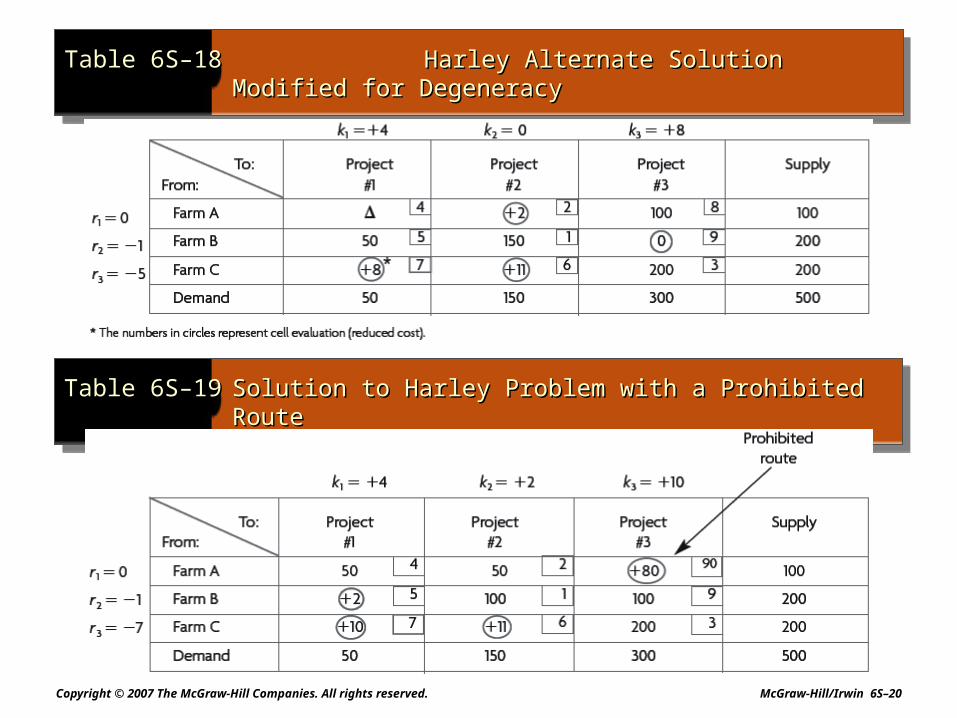
Table 6S–18 Table 6S–18 Harley Alternate Solution Modified for DegeneracyHarley Alternate Solution Modified for DegeneracyTable 6S–18 Table 6S–18 Harley Alternate Solution Modified for DegeneracyHarley Alternate Solution Modified for Degeneracy
Table 6S–19Table 6S–19 Solution to Harley Problem with a Prohibited RouteSolution to Harley Problem with a Prohibited RouteTable 6S–19Table 6S–19 Solution to Harley Problem with a Prohibited RouteSolution to Harley Problem with a Prohibited Route

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–21
Table 6S–20 Table 6S–20 A Dummy Origin Is Added to Make Up 80 UnitsA Dummy Origin Is Added to Make Up 80 UnitsTable 6S–20 Table 6S–20 A Dummy Origin Is Added to Make Up 80 UnitsA Dummy Origin Is Added to Make Up 80 Units
Table 6S–21Table 6S–21 Solution Using the Dummy OriginSolution Using the Dummy OriginTable 6S–21Table 6S–21 Solution Using the Dummy OriginSolution Using the Dummy Origin

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–22
Table 6S–21Table 6S–21 Solution Using the Dummy OriginSolution Using the Dummy OriginTable 6S–21Table 6S–21 Solution Using the Dummy OriginSolution Using the Dummy Origin
Table 6S–22Table 6S–22 Solution Using the Dummy OriginSolution Using the Dummy OriginTable 6S–22Table 6S–22 Solution Using the Dummy OriginSolution Using the Dummy Origin

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–23
Table 6S–23Table 6S–23 Row ReductionRow ReductionTable 6S–23Table 6S–23 Row ReductionRow Reduction
•The Hungarian Method• provides a simple heuristic that can be used to find the optimal set
of assignments. It is easy to use, even for fairly large problems. It is based on minimization of opportunity costs that would result from potential pairings. These are additional costs that would be incurred if the lowest-cost assignment is not made, in terms of either jobs (i.e., rows) or employees (i.e., columns).
Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–24
The Hungarian MethodThe Hungarian MethodThe Hungarian MethodThe Hungarian Method
• Provides a simple heuristic that can be used to find the optimal set of assignments.
• Is easy to use, even for fairly large problems.
• Is based on minimization of opportunity costs that would result from potential pairings.
–These additional costs would be incurred if the lowest-cost assignment is not made, in terms of either jobs (i.e., rows) or employees (i.e., columns).

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–25
Requirements for Use ofRequirements for Use of the Hungarian Method the Hungarian Method
Requirements for Use ofRequirements for Use of the Hungarian Method the Hungarian Method
• Situations in which the Hungarian method can be used are characterized by the following:
1. There needs to be a one-for-one matching of two sets of items.
2. The goal is to minimize costs (or to maximize profits) or a similar objective (e.g., time, distance, etc.).
3. The costs or profits (etc.) are known or can be closely estimated.
Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–26
Special SituationsSpecial SituationsSpecial SituationsSpecial Situations
• Special Situations– Certain situations can arise in which the model
deviates slightly from that previously described.
• Among those situations are the following:– The number of rows does not equal the number of
columns.– The problem involves maximization rather than
minimization.– Certain matches are undesirable or not allowed.– Multiple optimal solutions exist.
Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–27
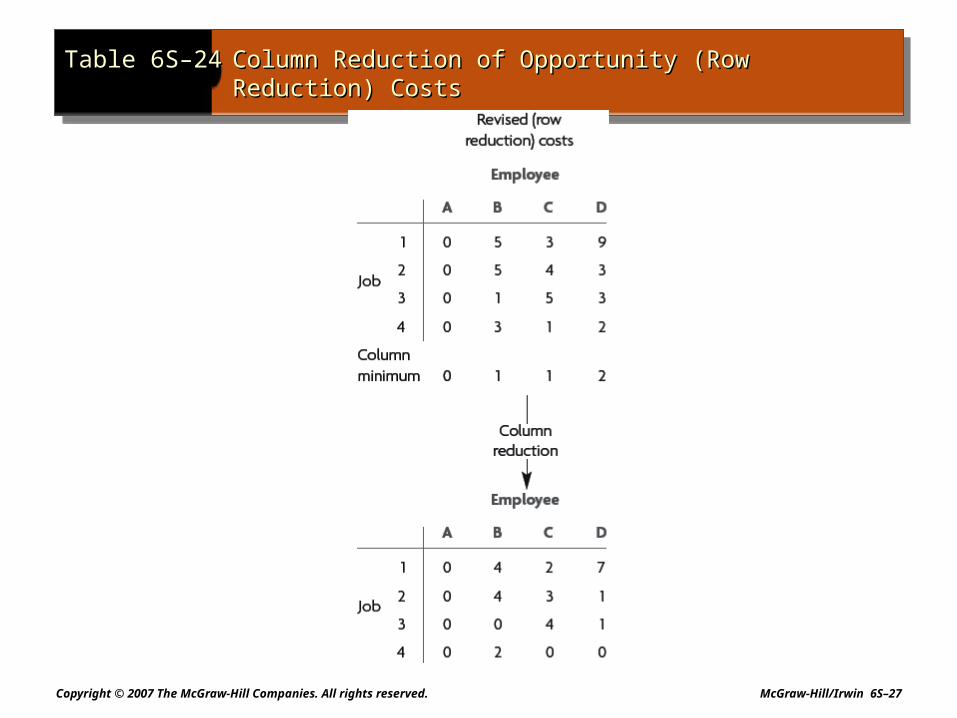
Table 6S–24Table 6S–24 Column Reduction of Opportunity (Row Reduction) CostsColumn Reduction of Opportunity (Row Reduction) CostsTable 6S–24Table 6S–24 Column Reduction of Opportunity (Row Reduction) CostsColumn Reduction of Opportunity (Row Reduction) Costs

Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–28
Table 6S–25Table 6S–25 Determine the Minimum Number of Lines Needed to CoverDetermine the Minimum Number of Lines Needed to Coverthe Zerosthe Zeros
Table 6S–25Table 6S–25 Determine the Minimum Number of Lines Needed to CoverDetermine the Minimum Number of Lines Needed to Coverthe Zerosthe Zeros
Table 6STable 6S–26–26 Further Revision of the Cost TableFurther Revision of the Cost TableTable 6STable 6S–26–26 Further Revision of the Cost TableFurther Revision of the Cost Table
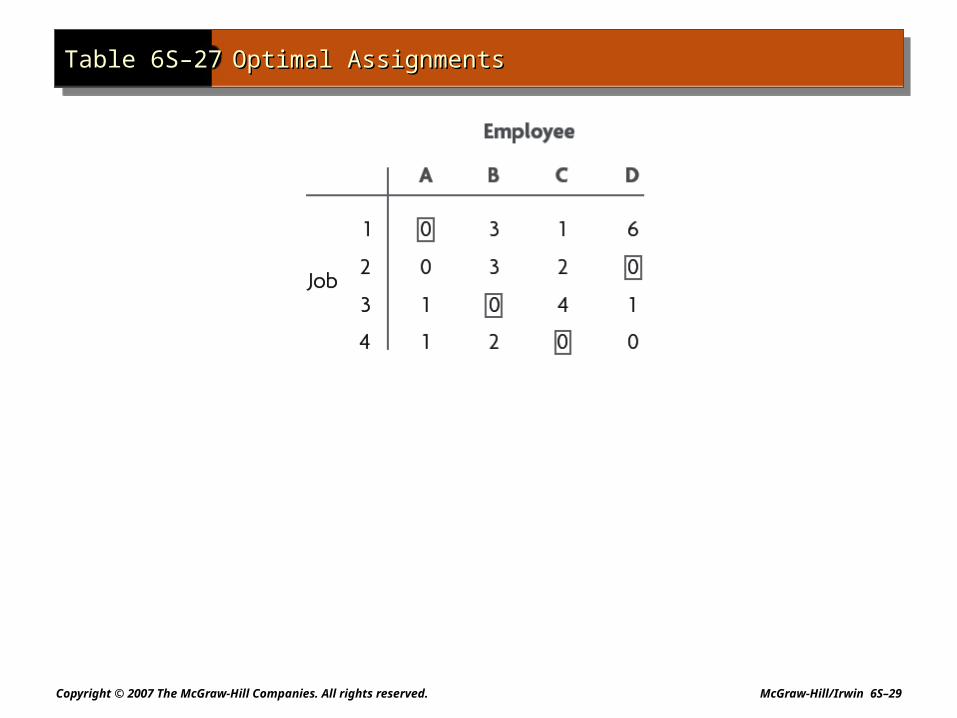
Copyright © 2007 The McGraw-Hill Companies. All rights reserved. McGraw-Hill/Irwin 6S–29
Table 6S–27Table 6S–27 Optimal AssignmentsOptimal AssignmentsTable 6S–27Table 6S–27 Optimal AssignmentsOptimal Assignments





























