Embed Size (px)
Citation preview

SpinLoc: Spin Once to Know Your Location
Souvik SenDuke University
Romit Roy ChoudhuryDuke University
Srihari NelakuditiUniversity of South Carolina
ABSTRACTThe rapid growth of location-based applications has spurred ex-tensive research on localization. Nonetheless, indoor localiza-tion remains an elusive problem mostly because the accurate tech-niques come at the expense of cumbersome war-driving or addi-tional infrastructure. Towards a solution that is easier to adopt,we propose SpinLoc that is free from these requirements. In-stead, SpinLoc levies a little bit of the localization burden on thehumans, expecting them to rotate around once to estimate theirlocations. Our main observation is that wireless signals attenuatedifferently, based on how the human body is blocking the signal.We find that this attenuation can reveal the directions of the APsin indoor environments, ultimately leading to localization. Thispaper studies the feasibility of SpinLoc in real-world indoor en-vironments using off-the-shelf WiFi hardware. Our preliminaryevaluation demonstrates accuracies comparable to schemes thatrely on expensive war-driving.
Categories and Subject DescriptorsC.2.1 [Network Architecture and Design]: Wireless communica-tion
General TermsDesign, Experimentation, Performance
KeywordsWireless, Localization, Cross-Layer, Application
1. INTRODUCTIONDespite numerous research efforts [1–8], indoor localization isstill not a mainstream technology. We believe that the main hur-dle lies in most of them requiring careful war-driving. Crowd-sourcing this operation [9] is an attractive option, but unlikely tobe adopted broadly since many users may not be willing to re-port their signal strength measurements to a localization server.
Permission to make digital or hard copies of all or part of this work forpersonal or classroom use is granted without fee provided that copies arenot made or distributed for profit or commercial advantage and that copiesbear this notice and the full citation on the first page. To copy otherwise, torepublish, to post on servers or to redistribute to lists, requires prior specificpermission and/or a fee.HotMobile’12, February 28–29, 2012, San Diego, California, USA.Copyright 2012 ACM 978-1-4503-1207-3 ...$10.00.
Moreover, due to the lack of GPS in indoor settings, gatheringground-truth is also hard. SecureAngle [10], an innovative PHYlayer technique proposed recently, computes the direction of aWiFi-capable device with respect to an AP. While certainly ap-pealing, the timeframe for ubiquitously installing special APs –with 8 or more antennas – is not a short-term proposition. Nonethe-less, we believe this is the right direction to approach indoor lo-calization, and propose to approximate it today, with off-the-shelfhardware, zero infrastructure, and absolutely no war-driving. Theonly tradeoff is that the user needs to make a slight effort – a spin– every time she needs her location. We explain this through anexample, followed by the technical underpinnings.
Consider a shopping mall where the user intends to localize her-self. With SpinLoc installed on her phone, she turns on the appli-cation, and makes a 360◦ rotation at her current location. Usingthe signals recorded during the rotation, and the already-knownAP locations, SpinLoc computes the location of the user (detailedlater). The location is marked on the floorplan of the mall anddisplayed on the phone screen. Other than making the floorplanand AP locations available to an Internet database, the mall au-thorities are not expected to make any investment – no infras-tructure installation; no war-driving. We show that in such set-tings, SpinLoc can offer localization accuracies in the order of6.5m with 4 audible APs in the vicinity. With more APs, the me-dian accuracy can improve upto 5m.
The technical underpinning of SpinLoc is actually quite simple.Without loss of generality, consider an AP located in the west-ward direction. When the user spins at her location, at somepoint the phone is between the AP and the user’s body, and ata different instance, the body lies between the AP and the phone(Figure 1). Given that the human body is a significant attenua-tor of WiFi signals (in the 2.4 and 5G H z frequencies), the signalsarriving at the phone differ significantly between these two con-figurations. In particular, when the phone is between the AP andthe user (Figure 1(a)), the direct path from the AP to the phone isstrong. However, when the user’s body lies between the AP andthe phone (Figure 1(b)), the direct path is severely blocked, re-sulting in large attenuation. By recording the compass directionat which this attenuation is maximum, it is feasible to infer theAP’s direction. With multiple APs in the vicinity, the direction toeach AP can be computed from the same spin. The knowledgeof all AP directions permits triangulation, ultimately yielding anestimate of the user’s location.
Importantly, SpinLoc does not use received signal strength (RSSI)as reported by WiFi cards. While RSSI may be somewhat appli-

Direct Path Direct PathBlocked by
Human Body
Figure 1: User orientation w.r.t AP: (a) facing (b) blocked
cable in outdoor environments [11], rich multipath in indoor en-vironments derails RSSI-based approaches. To circumvent thisproblem, SpinLoc relies only on the signal strength of the directsignal path, i.e., the signal component that traverses along thestraight line joining the AP and the mobile device. Fortunately,this information can be extracted from the power-delay profile ofa link, a physical layer information that is exported by the Intel5300 card. Thus, if designed well, SpinLoc can be a candidate fornear-future deployment using off-the-shelf hardware.
Of course, building such a system to cope with real-world sce-narios entails a range of technical and social challenges: (1) Thephone’s compass error may be significant – how does that affectSpinLoc’s accuracy? (2) The attenuation of the direct signal pathmay vary with other humans in the environment – how can Spin-Loc cope with such variations? (3) Will the idea work even whenthe direct signal path is weak? This paper addresses these ques-tions and presents promising evidence to justify deeper inves-tigation. The proof-of-concept is built on Dell laptops, Androidphones, and Cisco APs, and achieves localization accuracy of 5 to12m in a university cafe and an engineering building. Even whenthe compass errors are large (upto 30◦), the accuracy does notdegrade more than 12m, so long as there are 5 APs within com-munication range. Finally, the energy footprint of the system issmall, suggesting real-world viability.
2. INTUITION AND MEASUREMENTSWe begin this section with a brief background on wireless mul-tipath propagation, followed by our key hypothesis and initialmeasurement-based verification.
2.1 BackgroundWireless signal propagation is similar to light. A transmitted sig-nal scatters in all radial directions and reflects on different sur-faces, including walls, furnitures, etc. Hence, in addition to a di-rect path from the transmitter to the receiver, copies of the samesignal arrive through many reflected paths, each with a differentdelay and attenuation. The wireless radio combines these multi-path copies, and ultimately extracts the information embeddedin the signal. Figure 2 illustrates 3 example signal paths from thetransmitter to the receiver.
Among all the multipath copies, we define the direct path as thestraight line joining the transmitter and the receiver. To under-stand when the human is precisely between the AP and the phone,SpinLoc must track only the direct path signal. Otherwise, if Spin-Loc uses the union of all signal components (as is the case withRSSI), it would be difficult to identify when the human has blockedthe signal. Figure 3(a) explains this next with an example.
In Figure 3(a), assume that the two signal components have been
Direct Path
ReflectedPath
Figure 2: Transmitted signal travels through multiple paths be-fore reaching the receiver
Direct Path
ReflectedPath
Direct path energy
Reflected path energy
0 0.5 1 1.50
5
10
15
20
25
Delay in microseconds
SN
R in
dB
Figure 3: (a) Spinning will not offer the AP direction if energyon both signal paths are added. (b) Power delay profile of anindoor transmission.
equally attenuated, one due to absorption by the human, andthe other due to multiple reflections. Now in both configurations(i.e., the human is on the left of the phone and blocking the di-rect path, or on the right of the phone and blocking the reflectedpath), the sum of the incident energies will be identical, makingit difficult to infer the AP’s direction. However, if only the directpath signal is used, one might expect a drop when the human ison the left of the phone, but not when she is on the right. Thismotivates the need to only use the direct path signal. Unfortu-nately, today’s WiFi interfaces do not provide the individual sig-nal components from which we can pick the desired signal com-ponent. RSSI, readily available from almost all interfaces, is thesum of energies over all signal components, and thereby, unreli-able in multipath-rich indoor environments.
In search of a mechanism to extract the direct path signal, welearnt that the Intel 5300 WiFi card exports some physical layerinformation, that can be translated to the power-delay profile (PDP).Loosely, the PDP captures the amount of energy incident on thereceiver at different delays. Since the direct path arrives quickerat the receiver than all other reflected paths, we find that pick-
0 60 120 180 240 300 360
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle
Norm
alized E
DP
0 60 120 180 240 300 360
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle
Norm
alized E
DP
0 60 120 180 240 300 360
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle
Norm
alized E
DP
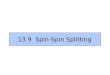
Figure 4: Measured EDP across user orientation when (a) AP is visible to phone (b) AP is behind a wall but close to phone (c) AP isbehind a wall but far away from phone. Different curves correspond to different experiments.
ing the least-delay value of the PDP essentially provides us withthe energy of the direct path. Figure 3(b) shows the PDP of an in-door transmission, where the AP was visible to the laptop. Sincethe direct path does not pass through obstructions in this case(and thus gets less attenuated), it yields the strongest signal com-ponent. While this is typical, it is certainly possible that a wallobstructs the direct path, making it weaker than other reflectedpaths. Importantly, SpinLoc is not sensitive to the relative en-ergy of the direct path against that of other paths; instead it fo-cuses only on the absolute energy of the direct path, denoted EDP.Comparing EDP across different configurations (during a spin)will help in revealing the AP’s direction.
2.2 SpinLoc: HypothesisWe summarize the SpinLoc intuition as follows. When a humanis present between an AP and her own mobile device (as in Fig-ure 1(b)), her body attenuates the direct signal path from the AP.This is because the human body with high water content hasbeen shown to be a significant absorber of (2.4 and 5 GHz) WiFisignals [11]. Now, when the human turns 180◦ from this orienta-tion (Figure 1(a)), her phone is located between her body and theAP, and is not subject to the attenuation. As a generalization ofthis, we present the following hypothesis: if a user rotates 360◦ ather own position, the direction that exhibits minimum energy forthe direct path (EDP) is the direction opposite to the AP. If suchdirections can be computed for at least 3 APs, then triangulationis feasible, ultimately yielding the user’s location.
We verify our hypothesis using measurements from off-the-shelfIntel 5300 cards. This card exposes per-subcarrier channel fre-quency response (CFR) to the user – an inverse fast fourier trans-form (IFFT) of the CFR outputs the power delay profile (PDP).We obtain the energy of the direct path (EDP) from the PDP, andtrack its variation as the user spins in her location. Three impor-tant questions are of interest. (1) Does minimum EDP accuratelyyield the AP’s direction. (2) Does the presence of additional hu-mans in the vicinity affect our hypothesis? (3) Can RSSI be usedto also infer the direction of the AP? The following measurementsare designed to answer these questions.
2.3 Measurement and VerificationOur experiments are performed in a relatively busy engineeringbuilding, with faculty offices and classrooms. To simultaneouslymeasure the PDP and the user’s compass orientation, we tapeda Google NexusOne phone to a laptop (this is because we didnot find any device that has the Intel 5300 card and a compass).
While holding this laptop-phone device, we ask a user to rotate360◦ at her location. On average, a rotation lasts around 10 sec-onds. The device is made to receive approximately 100 packetsper second and record the energy of the direct path (EDP) for eachreceived packet. We average the EDP over all packets received ina given orientation. Then, to cope with fast fading, we smoothenthe series of per-orientation EDP by using a simple moving aver-age (discussed later).
We begin with an experiment where the AP is visible to the user– this implies the existence of a strong direct path when the userfaces the AP. Figure 4(a) plots the EDP as a function of the user’sorientation with respect to this AP (the 3 curves are from 3 dis-tinct locations). Assuming the AP’s direction to be the 0◦ refer-ence, the EDP should ideally be minimum at 180◦. Evident fromthe graph in Figure 4(a), the EDP dip is indeed close to 180. Apertinent question is whether this technique holds even whenthe direct path is not as strong (such as when it passes throughan obstruction). To this end, we place the AP behind a wall thatblocks the direct path between the AP and the mobile device. Fig-ure 4(b) shows a consistent behavior even in this scenario – themaximum EDP dip is still close to 180◦. In a subsequent experi-ment, we keep the AP behind the wall and move the user far awayfrom the AP, forcing the WiFi signal to be weaker. Still, the EDPdips around 180 although the dip is less sharp (Figure 4(c)). Wefind consistent results over multiple other experiments, suggest-ing promise with SpinLoc.
0 60 120 180 240 300 360
0.4
0.6
0.8
1
1.2
1.4
1.6
Angle
Norm
aliz
ed E
DP
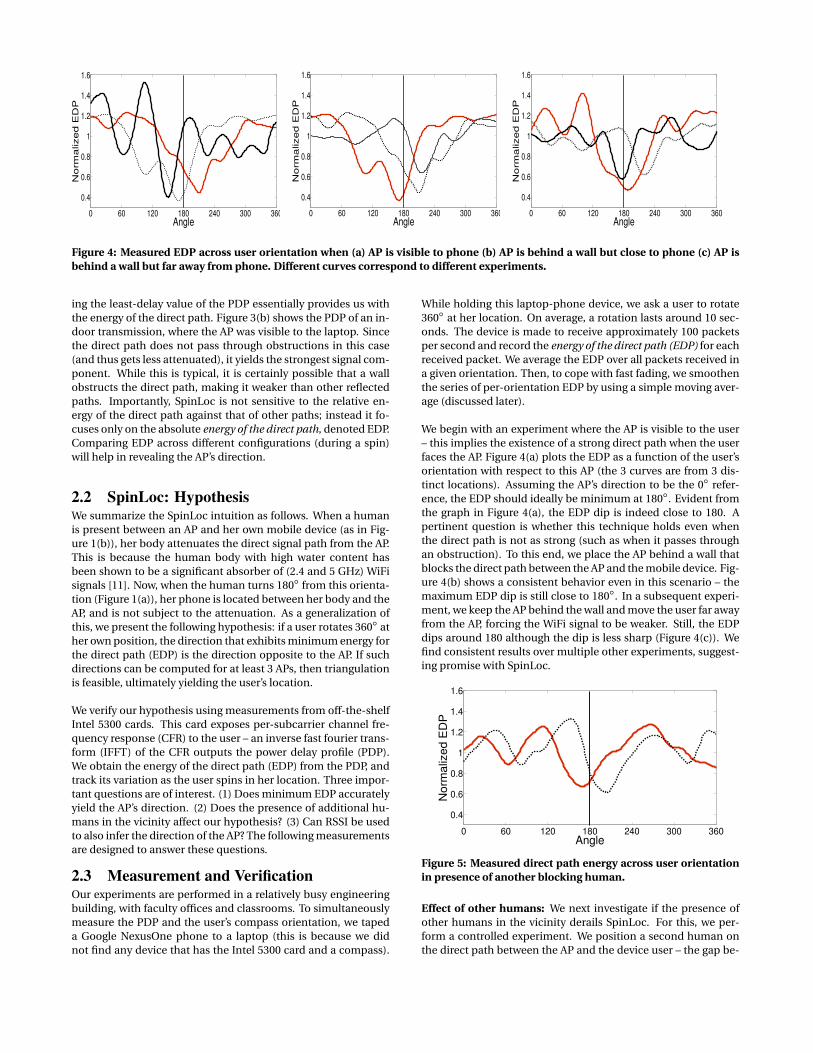
Figure 5: Measured direct path energy across user orientationin presence of another blocking human.
Effect of other humans: We next investigate if the presence ofother humans in the vicinity derails SpinLoc. For this, we per-form a controlled experiment. We position a second human onthe direct path between the AP and the device user – the gap be-

tween the two humans is 2m. This is expected to reduce EDPeven when the user is facing the AP. Figure 5 plots the variationof EDP when the user rotates. Observe that although the EDP dipis less sharp, the minimum value is still near 180◦. This suggestsSpinLoc’s robustness to humans in the environment.
Why not use received signal strength (RSSI)? Previous work hasshown that humans can attenuate the RSSI of a signal by block-ing it [11], and this can be used in outdoor environments to es-timate the AP’s direction. However, this observation does notextend to indoor environments, where wireless propagation isheavily dominated by multipath. This is because RSSI can be ap-proximated as the sum total of energy over all the signal paths.As explained in Section 2.1, the amount of energy blocked bythe human in different orientations can be the same, resultingin no clear dip (or multiple dips). Figure 6 captures this behavior– when the user spins, the RSSI dips are non-unique, and oftenhappen far away from the ideal 180◦ orientation.
0 60 120 180 240 300 36025
26
27
28
29
30
31
32
Angle
SN
R in d
B
Figure 6: Measured RSSI across user orientation.
3. SYSTEM DESIGNTranslating SpinLoc’s high level idea into a functional prototypeentails two tasks: (1) How to find the direction to an AP as pre-cisely as possible? (2) How to localize a mobile device with impre-cise direction information? Of course, the simplicity of design isvital for SpinLoc because the entire operation must be executedon the mobile device – we assume no reliance on any localizationserver.
3.1 Finding AP direction with SpinLocWe observe that as the user spins, her body gradually blocks andsubsequently unblocks the direct signal path from the AP to thedevice. Even when the user is at 90◦ from the AP, the direct pathsignals may still be partially blocked, perhaps by the user’s armsor shoulders. Consequently, the energy on the direct path (EDP)will decrease and increase, forming crests and troughs, as shownin Figures 4. We exploit the troughs to correctly identify the APdirection. A naive approach might be to find the angle corre-sponding to the minimum EDP and declare the opposite angleas the correct AP direction. But this approach may not be robustin the presence of fast fading and measurement noise. The di-rect path signal may combine with other signals in the air (fromother interfering transmissions), causing its energy to fluctuateinstantaneously even without the human obstacle. However, av-erages over multiple packets can be expected to eliminate thesefluctuations. Therefore, we perform a moving average on the se-quence of EDPs, much like a low pass filter. Figure 7 shows the
effect – the dashed curve shows the raw EDP variations while thesolid line shows the same variation after filtering. Clearly, filter-ing makes the blocking effects easier to recognize. SpinLoc nowdeclares the angle corresponding to the minimum EDP as the an-gle opposite to the AP.
0 60 120 180 240 300 3600
0.5
1
1.5
Angle
Norm
aliz
ed E
DP
After FilteringBefore Filtering
Figure 7: (Un)Filtered EDP w.r.t. user’s orientation.
3.2 Localization using Angle InformationOnce the angle to each of the APs is estimated – note that Spin-Loc estimates all these angles in one spin – SpinLoc determinesthe user’s location using triangulation. Let us denote the esti-mated angle from the phone to APi as θi . For triangulation, wedraw a line from APi along the direction of ((θi +180) mod 360);this is the opposite direction of θi . Denote this line as Li (Figure8). SpinLoc then computes the intersection points of all pairs of< Li ,L j >, i 6= j . The centrioid of these intersecting points is de-clared as the estimated location of the device.
We tune this method as follows. We find that SpinLoc’s angle es-timation accuracy reduces at weaker signal strengths, and hence,we choose only relatively strong APs (20dB or stronger) for local-ization. Furthermore, if two APs are located at nearly the samedirection, their intersection point is likely to be far away from themobile’s actual location (in the extreme case, if the two APs arealigned, their intersection point will be located at infinity). To re-move such outliers, SpinLoc uses the stronger of the two APs forlocalization when their estimated angles differ by less than 20◦.Figure 8 illustrates the overall process.
Leveraging RSSI information: We explore if using the RSSI infor-mation can benefit SpinLoc. Although RSSI is a crude indicator ofdistance, our hypothesis is that it may be beneficial in conjunc-tion with reasonably good angular information. Thus, based onthe recorded RSSI, we estimate the distance between the deviceand APi as Di
1. Now for each APi , we plot a point that is locatedDi distance away in the direction of (θi +180) mod 360. SpinLocthen computes the centroid of these points as the estimate of thedevice’s location. We evaluate the performance in the next sec-tion.
3.3 Points of DiscussionThe locations of APs within a building (such as a mall or museum)have to be made available to SpinLoc – is this realistic? We be-lieve that any indoor localization system will need the floorplanto provide a semantic meaning to the computed location. If the
1We use standard pathloss equations, with pathloss exponent of3 for indoor environments.

AP2
AP3
AP5AP1
AP4
Centroid
L , L , L = Estimated directionE = Localization Error
Estimated Direction
ActualDirection
L
L
L E
1 2 3
1
2
3
Figure 8: Illustration of SpinLoc’s localization procedure: OnlyAP1, AP2, AP3 used for triangulation. AP4 is eliminated be-cause it has a similar direction as AP3. AP5 is a weak link andcan result in a large estimation error.
mall administration is willing to extend the floorplan, the AP lo-cations may be easy to add.
SpinLoc is reactive because the user invokes localization – can Spin-Loc be proactive? With the phone compass always on, it might bepossible to track naturally occurring rotations of the user, whenshe turns corners or makes about turns. SpinLoc may then beable to deduce the direction of a subset of APs, and combine withsome degree of dead-reckoning to estimate the user’s location.The viability of such a scheme is one of our main topics of inves-tigation.
To get beacons from all the APs, does SpinLoc require the APs to beon the same channel? This is not necessary because every timethe user invokes SpinLoc, the WiFi interface in the device canperform a channel scan. This will permit the device to receivebeacons from all APs. Of course, the indoor space would need tohave at least 3 APs in the audible range, which we believe is quitecommon.
4. PERFORMANCE EVALUATIONPrototype and Experimental Setup: As mentioned earlier, weimplement SpinLoc using a laptop with an Intel 5300 wirelesscard and a Google Nexus One phone. The phone is time synchro-nized and physically attached to the laptop – it records the com-pass orientation and sends it to the laptop. The laptop receives100 small beacon packets per second from Cisco E4200 APs, op-erating at 40M H z on the 2.4G H z band. The user spins carry-ing the laptop-phone module in her hand. We evaluate SpinLocacross 55 locations in two environments: (1) engineering build-ing with offices and classrooms and (2) a university cafe. In theengineering building, we experiment with 6APs at 30 locations.The university cafeteria is relatively smaller; we deploy 4 APs andreport results from 25 locations. We covered approximate areasof 1000 m2 and 800 m2 respectively in these buildings.
Angle Determination Accuracy: At each of the 55 locations, Spin-Loc estimates the angle of every audible AP2. Since we know theground truth for each of these APs, we plot SpinLoc’s angle es-timation error as a CDF in Figure 9(a). Evidently, the mean isless than 20◦, but for around 20% of the cases, the errors can beas high as 40−60◦. We postulate that the high errors are due toweaker links. To investigate this further, we plot the average an-gle error as a function of link SNR in Figure 9(b). The figure showsthat the angular error indeed decreases with increasing SNR. Thereason is that weak links may not have a significant direct signalpath and hence less likely to exhibit a sharp EDP dip, even whenthe user blocks the signal. This led us to exclude weak APs in thedesign of SpinLoc.
0 10 20 30 40 50 60 70 800
0.2
0.4
0.6
0.8
1
Angle esimation error (degrees)C
DF
10−15 16−20 21−25 26−30 31−400
10
20
30
40
50
SNR in dB
Mean a
ngle
err
or
Figure 9: (a) SpinLoc angle estimation error (b) Error decreaseswith increasing SNR, stronger the AP better the accuracy.
Localization Accuracy: The above results suggest that links strongerthan 20dB on average, have less than 20◦ angle error. Hence,for better accuracy, SpinLoc only uses APs that meet this crite-ria. Figure 10(a) plots the CDF of localization error across 55 lo-cations. The median localization accuracy is 7.2 meters. Figure10(a) also shows the benefit of leveraging RSSI – the median ac-curacy improves to within 5 meters. Both the approaches out-perform simple RSSI based triangulation which has a median ac-curacy of 14.7 meters (Figure 10(a)). Figure 10(b) shows that theaccuracy improves with increasing number of (strong) APs at agiven location. Considering that SpinLoc does not need anythingelse other than the APs’ location, we believe these results may bedeemed promising. Of course, conclusive results about SpinLoc’saccuracy will require far more extensive evaluation.
2We use the term angle and direction interchangeably.

5 10 15 20 25 30 350
0.25
0.5
0.75
1
Localization error in meter
CD
F
Using only angle
Using angle + RSSI
Using only RSSI
0
2
4
6
8
10
Lo
ca
liza
tio
n E
rro
r (m
ete
r)
32 locations
11 locations
12 locations
3 APs 4 APs 5 APs
Figure 10: (a) SpinLoc localization accuracy across 55 spots (b)Accuracy w.r.t number of APs per location.
5. LIMITATIONS AND NEXT STEPSWe discuss a few concerns with SpinLoc, and potential ways toalleviate them.
Will SpinLoc need frequent spins for navigation? SpinLoc tradesoff wardriving and infrastructure for some user involvement. Whetherthis is acceptable to users is likely to depend on how frequentlythey need to spin, say within a mall. We believe it is possiblefor SpinLoc to combine naturally occurring turns and spins ofusers, with other direction and distance estimation methods, toreduce the need for frequent spins. Our ongoing work is directedtowards a spin-in-the-worst-case type of approach.
Will SpinLoc consume substantial energy? SpinLoc neither needsto download signal maps, nor does it require CPU-intensive match-ing operations. In this regard, the energy consumption is likely tobe quite low. However, if the region is sparse in WiFi APs, the WiFichannel scanning operation may consume some energy. How-ever, SpinLoc could stop scanning once it has discovered the req-uisite number of APs. We plan to investigate the energy implica-tions in greater detail in future work.
6. RELATED WORKA wide variety of approaches have been proposed for indoor lo-calization each incurring a different form of overhead. RF sig-nal strength-based localization schemes such as RADAR [1], Ho-rus [2] and PinLoc [12] perform detailed site surveys a priori togenerate WiFi based location fingerprints. Place Lab [3] and Ac-tive Campus [4] attempt to reduce the overhead of calibration,coupling information from WiFi and GSM base stations. Time-
based techniques such as PinPoint [5], and TPS [6] utilize timedelays in signal propagation to estimate distances between wire-less transmit-receiver pairs. The Cricket system [7, 8] utilizes ul-trasound and RF signals, requiring ultrasound detectors on mo-bile devices for localization, limiting its applicability.
Angle-of-arrival based techniques utilize multiple antennas to es-timate the angle at which signals are received, and then geomet-rically localize devices [10, 13]. These techniques require quitesophisticated systems of 4 to 8 antennas and non-trivial signalprocessing capabilities, unlikely on mobile devices in the nearfuture. Borealis [11] attempts to find the direction of a rogueAP by rotating a smartphone around a signal blocking obstacle.They rely on RSSI only and hence are limited to outdoor envi-ronments. SpinLoc’s ability to utilize PHY layer information fromoff-the-shelf WiFi cards for effective indoor localization, makes ita candidate for immediate adoption.
7. CONCLUSIONThis paper explores the feasibility of localizing a device by delib-erately inserting blockages in wireless signal reception. If a userspins at her current location, we find that the direction of the APcan be determined with a median error of 20◦. When combinedwith RSSI information, the location accuracy can reach almost5m in dense WiFi conditions. While today’s best indoor localiza-tion schemes may be comparable (or slightly better), they comewith the overheads of war-driving, additional infrastructure, orheavy computation. We believe SpinLoc may be a simple andalternative approach, perhaps more suited to near-term deploy-ment in indoor environments.
8. REFERENCES[1] V. Bahl et al. RADAR: An in-building rf-based user location
and tracking system. In INFOCOM, 2000.[2] M. Youssef and A. Agrawala. The horus WLAN location
determination system. In MobiSys, 2005.[3] Yu-Chung et al. Accuracy characterization for
metropolitan-scale wi-fi localization. In MobiSys, 2005.[4] William G. Griswold et al. Activecampus: Experiments in
community-oriented ubiquitous computing. Computer,2004.
[5] M. Youssef et al. Pinpoint: An asynchronous time-basedlocation determination system. In ACM Mobisys, June 2006.
[6] X. Cheng et al. TPS: A time-based positioning scheme foroutdoor sensor networks. In IEEE Infocom, March 2004.
[7] N. Priyantha, A. Chakraborty, and H. Balakrishnan. Thecricket location-support system. In MOBICOM, 2000.
[8] A. Smith, Balakrishnan, et al. Tracking moving devices withthe cricket location system. In ACM Mobisys, June 2004.
[9] K. Chintalapudi, A. Iyer, and V. Padmanabhan. Indoorlocalization without the pain. In MOBICOM, 2010.
[10] J. Xiong and K. Jamieson. SecureAngle: improving wirelesssecurity using angle-of-arrival information. In ACMHotNets, 2010.
[11] Z. Zhang et al. I am the antenna: Accurate outdoor aplocation using smartphones. ACM MOBICOM, 2011.
[12] S. Sen et al. Precise Indoor Localization using PHY LayerInformation. In ACM HotNets, 2011.
[13] D. Niculescu and B. Nath. VOR base stations for indoor802.11 positioning. In ACM MobiCom, September 2004.