Embed Size (px)
Citation preview

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SSOORRUU 11.. Yanda verilen iki transfer fonksiyonu için; (a). Bir tane simülasyon diyagramı çiziniz
)7)(3)(2()5)(1(
)()(
+++++=
sssss
sUsY
(b). Çizdiğiniz simülasyon diyagramını kullanarak bu sistemin durum uzayı denklemlerini elde ediniz.
(c). Transfer fonksiyonu verilen bu sisteme ilişkin durum uzayı denklemlerini elde edebileceğiniz bir MATLABTM yazılımı gerçekleştiriniz.
(d). (b) şıkkında elde ettiğiniz durum uzayı denklemlerini kullanarak bu sistemin karakteristik denklemini ve köklerini bulunuz.
ÇÖZÜM 1:

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SORU 2 Biri denetim, diğeri bozucu olmak üzere iki giriş, bir çıkışa sahip denetlenecek iki sistem Şekil (a) ve (b) de blok diyagramları ile verilmektedir.
2s +6s+22
s+31
++U(s)
W(s)
Y(s)
(a)
2s +3s+22
s-11
++U(s)
W(s)
Y(s)
(b)
Bozucu girişi ölçülebilen bu sistemler için ileri beslemeli birer denetleyici tasarlayınız. Öğle ki: Sabit referans ve bozucu giriş işaretleri uygulandığında sürekli çalışma hatası sıfır olsun.
ÇÖZÜM 2:

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SSOORRUU 33.. Transfer fonksiyonu yanda verilen sistem için öğle bir denetleyici tasarlayınız ki;
(a). Sürekli hale geçiş süresi ≤ 2 saniye, )5)(2(
1)()()(
++==
sssUsYsG
(b). Yüzde aşma (yüzde overshoot) ≤ %15 olsun. (c). Tasarladığınız denetleyici sisteme eklendiğinde birim basamak giriş için sürekli
çalışma hatasının ne olduğunu bulup, denetimsiz durumda meydana gelen sürekli çalışma hatası ile kıyaslayınız.
ÇÖZÜM 3:

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
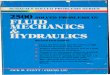
SSOORRUU 44 .. Bir sistemin açık çevrim transfer fonksiyonu
51)(+
=S
SG olarak verilmektedir. Bu sistemin,
(a). % aşamasını bulunuz. (b). Sürekli hale geçiş süresini bulunuz. (c). Bu sistem için bir PI denetleyici tasarlayınız. Öyle ki, birim geri beslemeli
kapalı çevrim sistemin kutupları şekilde gösterilen S-düzleminin taralı kısmında yer alsın.
Re s
Im s
-2
45o
ÇÖZÜM 4:

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SSOORRUU 55 .. Fiziksel bir sistemin transfer fonksiyonu 2
1s
sG =)( olarak verilmektedir.
(a). Bu sistemin durum denklemlerini elde ediniz. (b). Bu sistem için durum geri beslemeli bir denetleyici (u=-kx) tasarlayınız. Öğle ki denetleyici ile birlikte
komple sistemin kökleri –2 nin solunda yer alsın.
ÇÖZÜM 5:

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SSOORRUU 66.. Yanda verilen iki transfer fonksiyonu için; (a). En az birer tane simülasyon diyagramı çiziniz (b). Bu simülasyon diyagramlarından birer takım durum denklemi
elde ediniz. (c). Elde ettiğiniz durum denklemlerinden herhangi birini sayısal
olarak nasıl çözebileceğinizi bir akış diyagramı ile gösteriniz. NOT: Runge-Kutta algoritmasının runge isimli bir alt
programdan çağrıldığını varsayınız.
6168682
23
2
+++++=sss
sssRsY)()(
330
210
520
++
+−+
+−=
ssssRsY)()(
ÇÖZÜM 6. (a). (i).
s +8s +16s+63 22s +8s+62R(s) Y(s)
Şekil. 1a
s +8s +16s+63 21
2s +8s+62R(s) Z(s) Y(s)
Şekil. 1b
Başlangıç koşulları sıfır alınırsa; zzszszsR 6168 23 +++=
zzzztr 6168)( +++= &&&&&&
)(6168 trzzzz +−−−= &&&&&&
zzszsY 682 2 ++=
zzzty 682)( ++= &&&
2
6+
+ +R(s) Y(s)
Z 1Z 2Z 3
1s
1s
1s
8
16
8
+ x1
x2x3
x1.x2
.x3.
6 Şekil. 1c
(ii).
+
+
+
s+5-20
s+2-10
s+330
R(s)
Y(s)
Şekil. 1d
s+51
s+21
s+31
-20
-10
30
+
+
+
R(s)
Y(s)
Y (s)1
Y (s)2
Y (s)3
Z (s)1
Z (s)2
Z (s)3
Şekil. 1e
11
11
11
11
20)(5
5)(5
zytrzz
zztrzszR
−=+−=
+=+=
&
&
22
22
22
22
20)(5
5)(5
zytrzz
zztrzszR
−=+−=
+=+=
&
&
22
22
22
22
20)(5
5)(5
zytrzz
zztrzszR
−=+−=
+=+=
&
&
321)( yyyty ++=
-20
-10
30
+
+
+
R(s)
Y(s)
Y (s)1
Y (s)2
Y (s)3
Z (s)1
Z (s)2
Z (s)3
1s
1s
1s
5
2
3
+
+
+
x1
x2
x3
x1.
x2.
x3.
Şekil. 1f

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
ÇÖZÜM 6.(b). (i). Şekil 1c den:
)(100
8166100010
3
2
1
3
2
1
trxxx
xxx
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
&
&
&
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
3
2
1
286xxx
y
(ii). Şekil 1f den:
)(111
300020005
3
2
1
3
2
1
trxxx
xxx
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
&
&
&
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−−=
3
2
1
301020xxx
y
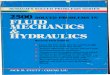
(c). Durum denklemlerinin sayısal çözüm algoritması
Sistem çıkışını hesaplay=Cx
Program dursun mu?t > tson
runge alt programını kullan ve
durum denklemlerini k iterasyon adımı için çöz.
x=runge(A,B,R,x0,dt)
Hesaplanan değerleri yeni başlangıç değerleri
olarak alıp yeni bir iterasyona başla
x0=xt=t+dtk=k+1
Veriler ve
başlangıç değerleri : A, B, C, R, x0, dt, k, tson
H
E

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SSOORRUU 77.. Transfer fonksiyonu yanda verilen sistem için
sssC
10
10)(ααββ
+++= )2s)(1s(
1)s(U)s(Y)s(G
++==
yapısına sahip bir denetleyici tasarlayınız öğle ki; a. Sürekli hale geçiş süresi ≤ 1.333 saniye, b. Yüzde aşma (yüzde overshoot) ≤ %16.3 olsun. c. Tasarladığınız denetleyici sisteme eklendiğinde birim basamak giriş için sürekli çalışma hatasının ne
olduğunu bulup, denetimsiz durumda meydana gelen sürekli çalışma hatası ile kıyaslayınız. ÇÖZÜM 7. +
-R(s) Y(s)1
(s+1)(s+2)C(s)E(s) U(s)
(a) ve (b). sn. 333.144 ≤==n
st ζωτ αζω =>⇒⇒ 3 n
%aşma= 3.16%21 ≤= −
−ζ
πζ
eM
( )( ) 0.5 ln
ln22
22 ≥⇒⇒
+≥ ζ
πζ
MM
o60 5.0cos ≤⇒⇒≥= βζβ
Hatırlatma: b=ea ise a=ln(b)
DENETLEYİCİ :
sssC
10
10)(ααββ
+++= alınırsa;
( ) ( ) ( ) 02233)( 001102
103
1 =+++++++= βαβαααααφ ssss Yeni kutupların taralı bölgede yer alabilmesi için, 3321 −=== sss alalım. Böylece istenilen karakteristik denklem:
( ) 0272793)( 233 =+++=+= sssssiφ
olur )()( ss iφφ = eşitliğinden; ⇒⇒⇒
61
0
1
==
αα
157
0
1
==
ββ
Böylece denetleyici transfer fonksiyonu: sssC
++=
6715)(
- = -3τβ=60o τ
jω

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
(c).
+
-R(s) Y(s)1
(s+1)(s+2)
C(s)E(s) U(s)15+7s
6+s
)()()( sYsRsE −= ( )( )( )
( )( )( ) ( ) )(157216
216)( sRssss
ssssE+++++
+++=
ssR 1)( = için,
( )( )( )( )( )( ) ( ) s
1 157216
216)(+++++
+++=ssss
ssssE
94
2712)(lim
0===
→ssEe
sSS 94=SSe
Denetimsiz iken;
s1
)2)(1(11
1)()(1
1)(
+++
=+
=
ss
sRsG
sE
( )( )( )( ) s
1 121
21)(+++
++=ss
sssE
64
1)2)(1()2)(1()(lim
01 =+++
++==→ ss
ssssEesSS
64
94
1 =<= SSSS ee

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SSOORRUU 88.. Şekilde bir hız debetim sisteminin blok şeması verilmektedir. Bu blok diyagramından da görüleceği gibi Ω(s) çıkış hızı, denetimsiz D(s) momeninden etkilenmektedir. Bu sistemde D(s)=0 iken referans hız çıkış hızına eşittir [ yani R(s)= Ω(s) ve dolayısıyla sürekli çalışma hatası ess=0 dır].
(a). Referans hız R(s)=0 iken, denetimsiz moment girişine birim basamak işareti uygulanırsa bu sistemin davranışı nasıl olur? Sürekli çalışma hatasını bularak yorumlayınız.
(b). (a) şıkkındaki duruma devam ederek, bu sisteme bir denetleyici tasarlayınız. Öyle ki ω(∞)=ess=0 olsun.
( c). (b) şıkkında belirlediğiniz denetleyici yerine bir PI denetleyici kullanılsaydı ω(∞)=ess=0 sağlanabilir miydi?
E(S)R(S) (S)+
-K Js
1++ D(s)
Ω(s)
ÇÖZÜM 8:

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
ÇÖZÜM 8.b:

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
ÇÖZÜM 8.c:

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SSOORRUU 99.. Bir fotovoltaik panelden maksimum güç alabilmek için, kapalı çevrim bir sistem kullanılarak güneş izlenmektedir. Bu izleme sistemi şekildeki gibi temsil edilebilmektedir.
100τs+1
E(S)R(S) +
-
Y(s)G(s)=
Burada nominal olarak τ=3 saniyedir.
(a). Bu sistemin duyarlılığını τ değerinde meydana gelecek küçük değişiklikler için belirleyiniz.
(b). Kapalı çevrim sistem tepkesinin zaman sabitini bulunuz.
ÇÖZÜM 9:

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SSOORRUU 1100.. Şekilde gösterilen birim geri beslemeli sistemin (a). Sürekli çalışma hatasını
i. Birim basamak giriş için bulunuz. ii. Birim rampa giriş için bulunuz.
(b). Sisteme G(S) den hemen önce bir integral (I denetleyici) ekleyerek (a) şıkkında istenenleri tekrarlayınız.
E(S)R(S) +
-
Y(s)10s +14s+502G(s)=

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
SSOORRUU 1111.. Transfer fonksiyonu )5.0(
1)()()(
+==
sssUsYsG olan bir sistem için, kutuplar –1, -2 ve –3
de yer alacak şekilde (a) Bir PI denetleyici tasarlayınız. (b) Bir lead/lag (Faz ilerletici/ faz geriletici) denetleyici tasarlayınız.
PI denetleyici
sKsKKsC I
DP ++=)(
Birim geribeslemeli kapalı çevrim sistemin karakteristik denklemi:
0)5.0(s
05.0s)(23
232
=++++=
=++++=
IPD
IPD
KsKKssKsKKssφ
İstenen karakteristik denklem:
6116s
)3)(2)(1()(23 +++=
+++=
ssssssDφ
)()( ss Dφφ = eşitliğinden;
611
5.5 65.0
==
=⇒⇒=+
I
P
DD
KK
KK
PID denetleyici

Karadeniz Teknik Üniversitesi Mühendislik-Mimarlık Fakültesi Elektrik-Elektronik Mühendisliği Bölümü Doç. Dr. İsmail H. ALTAŞ
ELKE 405 Otomatik Kontrol Sistemleri PROBLEMLER VE ÇÖZÜMLERİ
Çözüm 11.b. lead/lag (Faz ilerletici/ faz geriletici) denetleyici
)1()1()(
2
1
ττ
ssKsC
++= olduğu hatırlanırsa;
Birim geribeslemeli kapalı çevrim sistemin karakteristik denklemi:
0)1)(5.0()1()( 21 =++++= ττφ ssssKs 0)5.0()5.01()( 1
22
32 =+++++= KsKsss τττφ
05.05.01)(22
12
2
23 =+++++=ττ
ττ
τφ KsKsss
İstenen karakteristik denklem:
6116s
)3)(2)(1()(23 +++=
+++=
ssssssDφ
)()( ss Dφφ = eşitliğinden;
375.1625.8)5.011(1 115.0
091.15.5
66K 6
182.05.5
1 65.01
212
1
22
22
2
==−=⇒⇒=+
===⇒⇒=
==⇒⇒=+
τττ
τ
ττ
ττ
τ
KK
K