Embed Size (px)
Citation preview
SNAKE ROBOTS SNAKE ROBOTS TO THE RESCUE!TO THE RESCUE!
IntroductionIntroduction
Intelligent robots in SAR dealing with tasks in complex disaster environments
Autonomy, high mobility, robustness, modularity
Biologically inspired mobile robots
Serpentine search robot hardware, sensor based path planning and control design
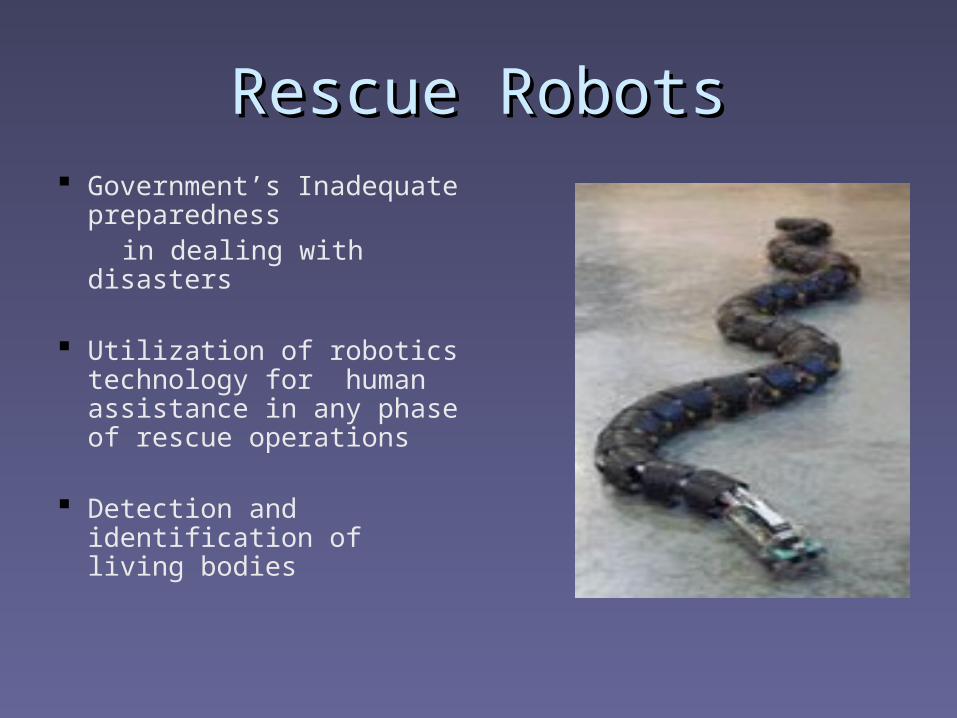
Rescue RobotsRescue Robots Government’s Inadequate
preparedness in dealing with disasters
Utilization of robotics technology for human assistance in any phase of rescue operations
Detection and identification of living bodies
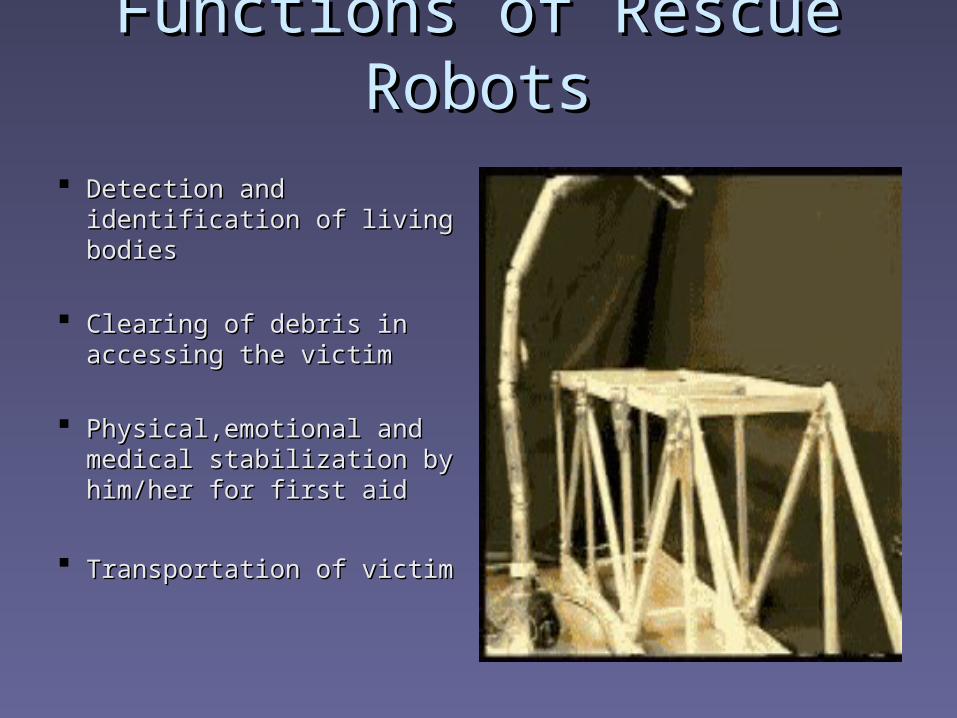
Functions of Rescue RobotsFunctions of Rescue Robots
Detection and identification Detection and identification of living bodiesof living bodies
Clearing of debris in Clearing of debris in accessing the victimaccessing the victim
Physical,emotional and Physical,emotional and medical stabilization by medical stabilization by him/her for first aidhim/her for first aid
Transportation of victimTransportation of victim
The Major Rescue ProblemsThe Major Rescue Problems
Generally destructive tools
Heavy construction of debris clearing machines
Slow and tedious tool operation
Search based on sniffing dogs and human voices
Retrieval of bodies can generate extra injuries
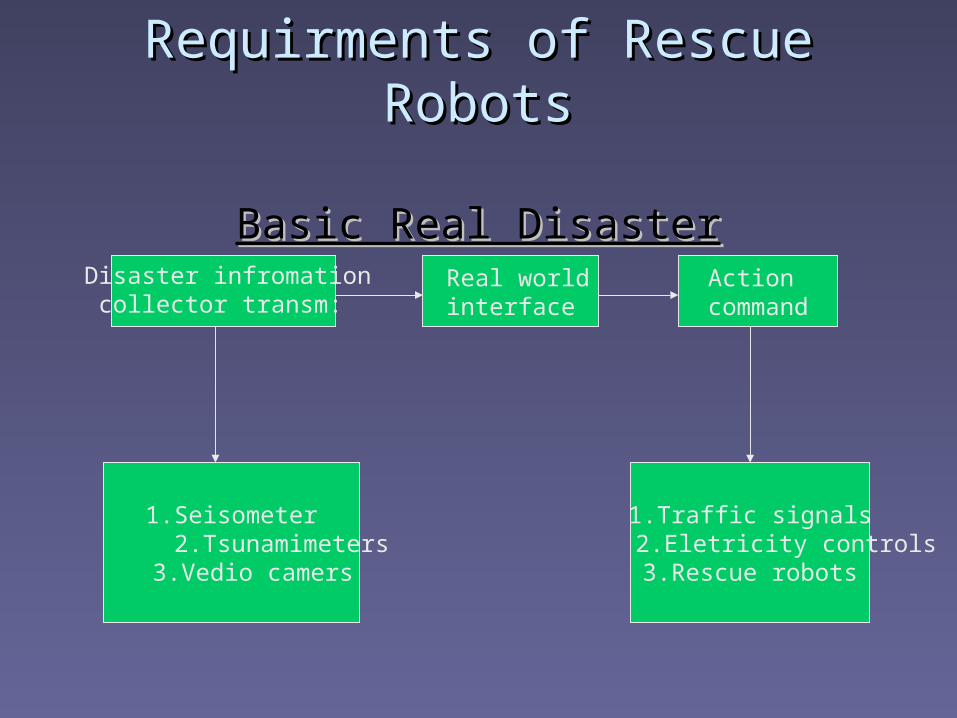
Requirments of Rescue RobotsRequirments of Rescue Robots
Basic Real DisasterBasic Real Disaster
Real worldinterface
Action command
Disaster infromation collector transm:
1.Seisometer 2.Tsunamimeters
3.Vedio camers
1.Traffic signals 2.Eletricity controls
3.Rescue robots
Virtual experience and traningVirtual experience and traning
Conditioning of optimal action in disasterConditioning of optimal action in disaster
Action simulator of parties of rescue,fire,fighters Action simulator of parties of rescue,fire,fighters and back supportsand back supports
Equipped with multitude of sensorsEquipped with multitude of sensors
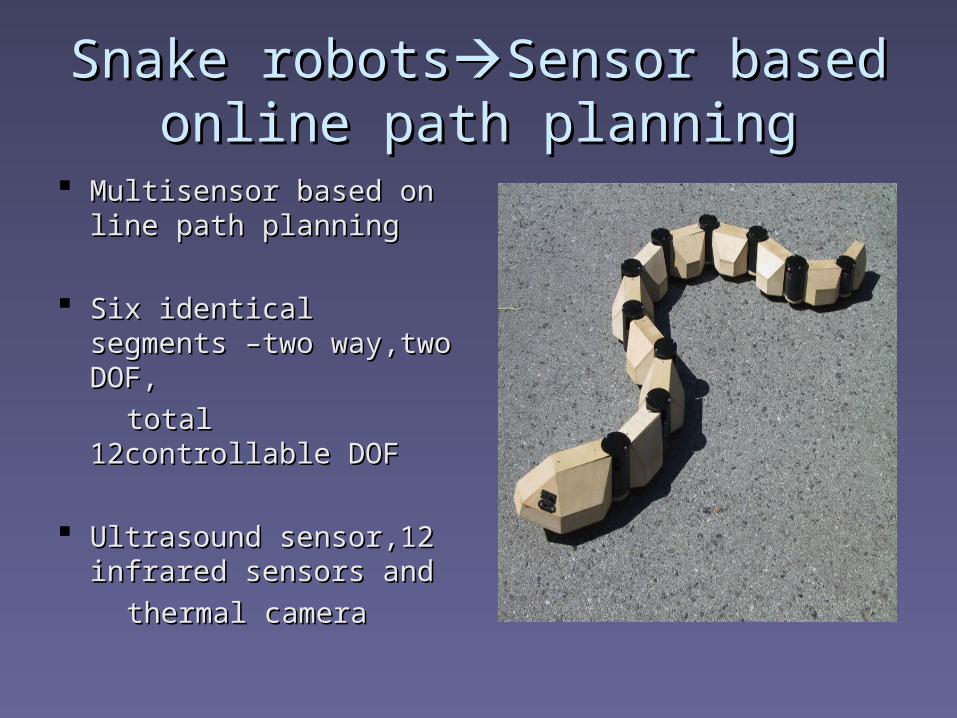
Snake robotsSnake robotsSensor based Sensor based online path planningonline path planning
Multisensor based on line Multisensor based on line path planningpath planning
Six identical segments –Six identical segments –two way,two DOF,two way,two DOF,
total 12controllable DOFtotal 12controllable DOF
Ultrasound sensor,12 Ultrasound sensor,12 infrared sensors andinfrared sensors and
thermal camera thermal camera
Different types of movementDifferent types of movement
It is achived by adapting the natural snake It is achived by adapting the natural snake motions to the multisegment robot motions to the multisegment robot configuraion:configuraion:
1)Move forward with rectilinear 1)Move forward with rectilinear or lateral motion.or lateral motion.
2)Move right/left with flapping 2)Move right/left with flapping motion.motion.
3)Change of direction.3)Change of direction.
Specification of prototypeSpecification of prototype
Actutor Actutor Stepping motor Stepping motor Material Material Alluminium alloy Alluminium alloy Dimension Dimension 82*82*67 cubic mm 82*82*67 cubic mm Weight Weight 300g 300g Max: Torque Max: Torque 20kgf/cm 20kgf/cm Max: angle ve- Max: angle ve- 50degrees per sec: 50degrees per sec: locity locity
Development of Prototype MechanismDevelopment of Prototype Mechanism
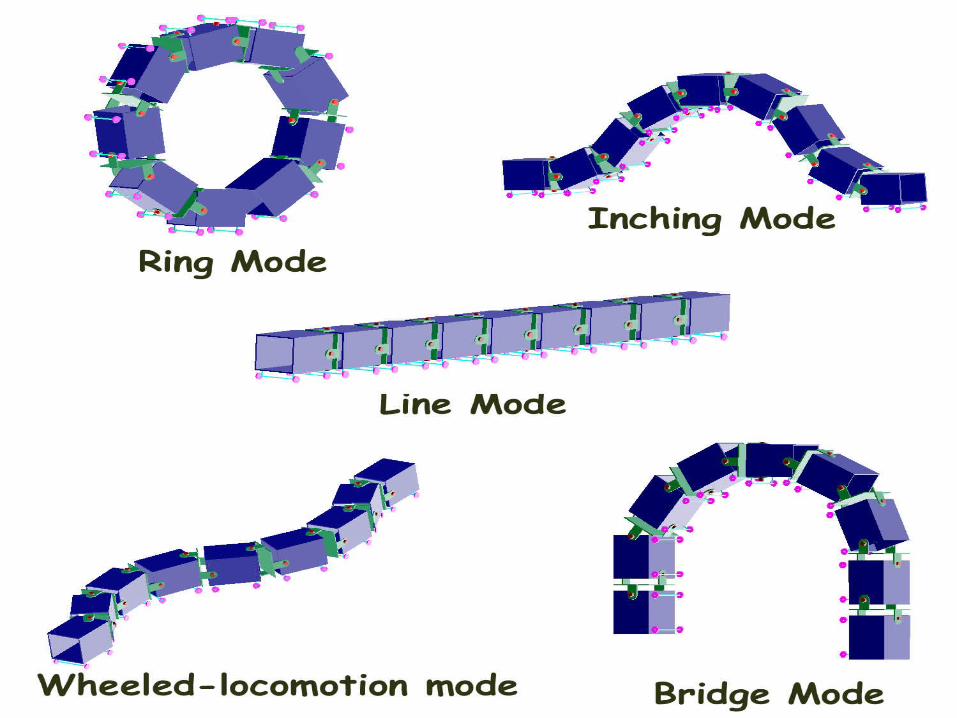
Effectively adapt to uncertain circumstances and carry activates with necessary flexibility Twisting mode: -folds certain joints to generate a twisting motion -within its body, resulting in a side-wise movement
Wheeled-locomotion mode: -where passive wheels are attached on units -increasing the friction
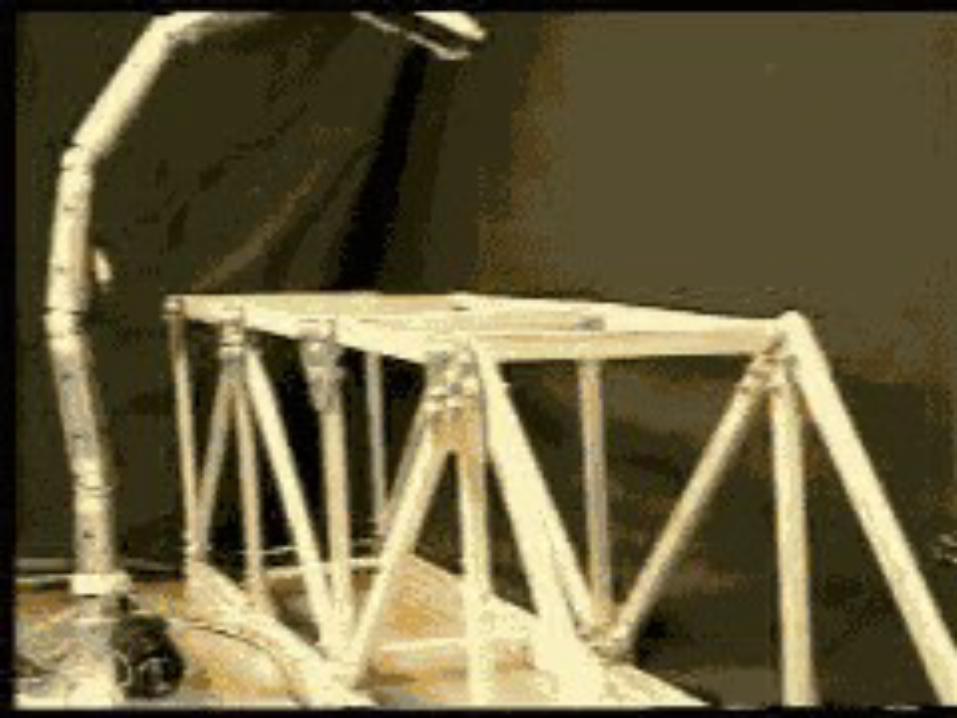
Bridge mode: -two-legged walking-type locomotion
-left-right swaying of the center of gravity
Ring mode: - two ends of the robot body are brought together by
its own actuation to form a circular shape -uneven circular shape rotate is expected to be achieved by proper deformation and shifting of center of gravity as necessary.
Inching mode: -undulatory movements of serpentine mechanisms -generates a vertical wave shape using its units
A GA Based Planning of Shape A GA Based Planning of Shape TransitionTransition
Transform shape of hyper redundant robotic mechanism, without losing structural stability proper planning methodology is essential.
The desired result is to make robot stand on its two ends in vertical position.
The transformation from the initial to the final configuration is divided in k intermediate configurations
to find the optimal set of those k configuration sequences through which the robot shape is to be transformed
Each configuration describes the sequence of relative joint angles of the body.
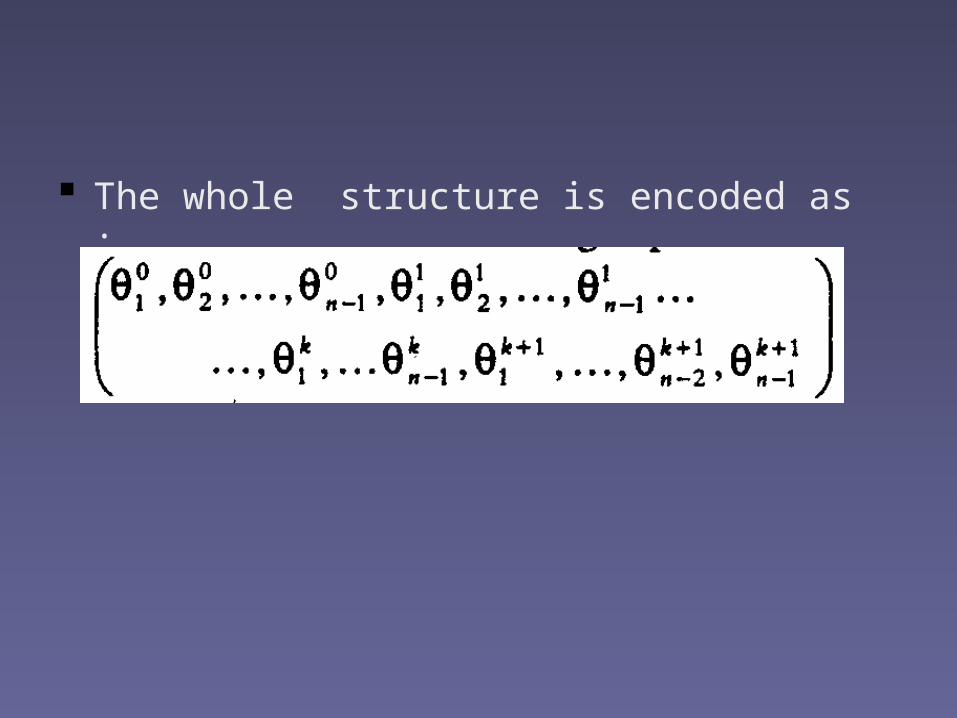
The whole structure is encoded as :
ConclusionConclusion
Aiming at the enhancing the quality of Aiming at the enhancing the quality of rescue and life after rescue, the field of rescue and life after rescue, the field of rescue robotics is seeking dexterous devices rescue robotics is seeking dexterous devices that are equipped with learning ability , that are equipped with learning ability , adaptable to various types of situations. adaptable to various types of situations. Research and development are going on for Research and development are going on for further modification of rescue robots. further modification of rescue robots. Considering various natural disasters and Considering various natural disasters and man-made catastrophes need for rescue man-made catastrophes need for rescue robots is focused.robots is focused.

QUESTIONSQUESTIONS

THANK YOUTHANK YOU



![OUR ROBOTS, OURSELVES · 2018. 9. 15. · OUR ROBOTS, OURSELVES Robotics and the Myths of Autonomy DAVID A. MINDELL Dmi blv dgb]m gZ kZcl_ kniga.biz.ua >>>](https://img.dokumen.tips/doc/110x75/5fd42d936698483e107143e1/our-robots-ourselves-2018-9-15-our-robots-ourselves-robotics-and-the-myths.jpg)

























