Embed Size (px)
Citation preview

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 1/19
Common Variable Types in Elasticity
Elasticity theory is a mathematical model of material deformation.Using principles of continuum mechanics, it is formulated in terms ofmany dierent types of eld variables specied at spatial points in thebody under study. Some examples include:
Scalars - Single magnitude
mass density ρ, temperature T , modulus of elasticity E, . . .
Vectors – Three components in three dimensions displacement vector
Matrices – ine components in three dimensions
stress matrix
Other – !ariables "ith more than nine components
Chapter 1 Mathematical Preliminaries
, e#, e$, e% are unit basis
vectors
Elasticity Theory, Applications and Numerics
M.H. Sadd , University of Rhode Island
321eeeu wvu ++=
στττστττσ
=σ
z zy zx
yz y yx
xz xy x
][
7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 2/19
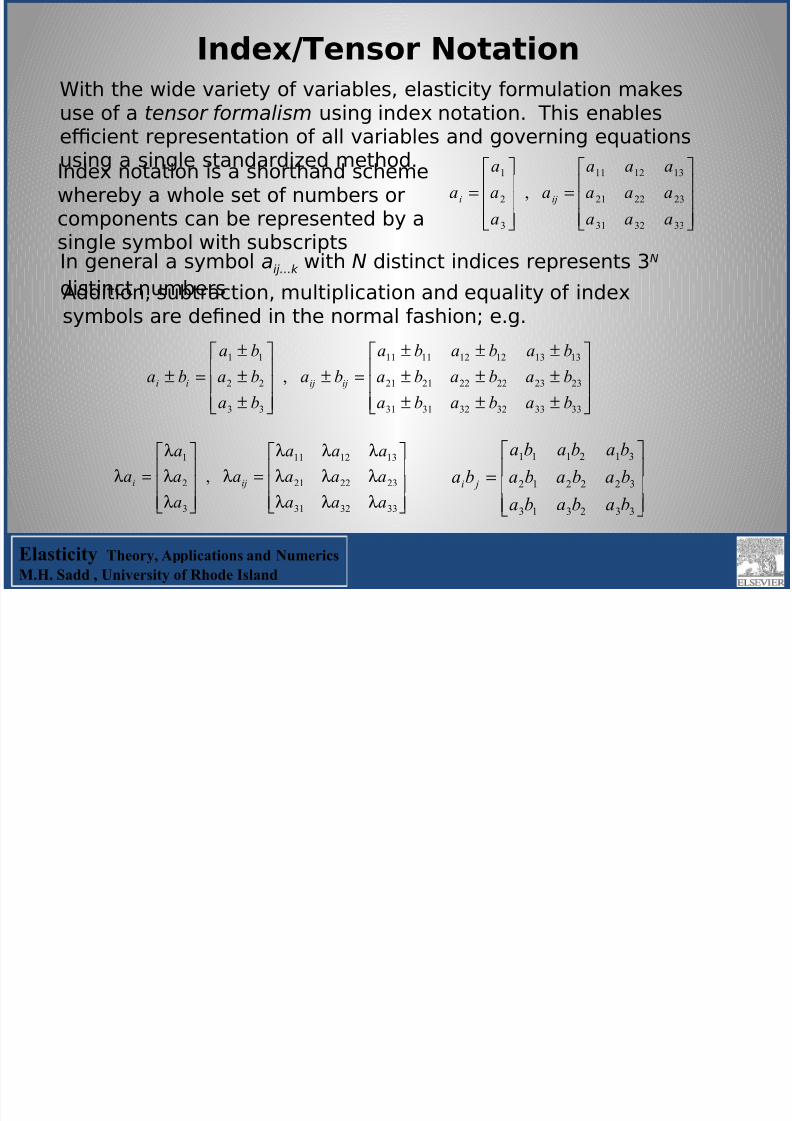
IndexTensor !otation&ith the "ide variety of variables, elasticity formulation ma'esuse of a tensor formalism using index notation. This enables
e(cient representation of all variables and governing e)uationsusing a single standardi*ed method.+ndex notation is a shorthand scheme"hereby a "hole set of numbers orcomponents can be represented by asingle symbol "ith subscripts+n general a symbol aij…k "ith N distinct indices represents %N
distinct numbersddition, subtraction, multiplication and e)uality of indexsymbols are dened in the normal fashion- e.g.
Elasticity Theory, Applications and Numerics
M.H. Sadd , University of Rhode Island
=
=
333231
232221
131211
3
2
1
,
aaa
aaa
aaa
a
a
a
a
a iji
±±±±±±±±±
=±
±±±
=±
333332323131
232322222121
131312121111
33
22
11
,
bababa
bababa
bababa
ba
ba
ba
ba
ba ijijii
λλλλλλλλλ
=λ
λλλ
=λ
333231
232221
131211
3
2
1
,
aaa
aaa
aaa
a
a
a
a
a iji
=
332313
322212
312111
bababa
bababa
bababa
ba ji

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 3/19
!otation "#les and $e%nitions
S#mmation Con&ention - if a subscript appears t"ice in
the same term, summation over that subscript from one tothree is implied- for example
symbol aij…m…n…k is said to be symmetric "ith respect toindex pair mn if
symbol aij…m…n…k is said to be antisymmetric "ith respect to
index pair mn if
Useful +dentity
. . . symmetric . . . antisymmetric
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
332211
3
1
332211
3
1
bababababa
aaaaa
iii
j
jij jij
i
iiii
++==
++==
∑
∑
=
=
k mnijk nmij aa .................. =
k mnijk nmij aa .................. −=
][)()(2
1)(
2
1ijij jiij jiijij aaaaaaa +=−++=
)(2
1)( jiijij aaa += )(
2
1][ jiijij aaa −=

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 4/19
The matrix aij and vector b
i are specified by
Determine the following quantities:
Indicate whether they are a scalar, vector or matrix.
Following the standard definitions given in section .!,
Example 1-1: Index Notation Examples
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
=
=
0
4
2
,
212
340
021
iij ba
][)( ,,,,,,,, ijij jiii jiij jij jk ijijijii aabbbbbbabaaaaaa
(matrix)
000
0168
084
(scalar)200164
(scalar)84
(vector)
8
16
10
(matrix)
7106
18196
6101
(scalar)394149160041
(scalar)7
332211
1221311321121111
332211
332211
333332323131232322222121131312121111
332211
=
=++=++==++++=
=++=
=++=
=++++++++=
++++++++==++=
ji
ii
jiij
iii jij
k ik ik i jk ij
ijij
ii
bb
bbbbbbbb
bbabbabbabbabba
babababa
aaaaaaaa
aaaaaaaaaaaaaaaaaaaa
aaaa
( )
( ) (matrix)
011
101
110
230
142
201
2
1
212
340
021
2
1
2
1
(matrix)
221
241
111
230
142
201
2
1
212
340
021
2
1
2
1
][
)(
−−
−=
−
=−=
=
+
=+=
jiijij
jiijij
aaa
aaa

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 5/19
Special Index Symbols
'ronec(er $elta
roperties:
)lternatin* or Perm#tation Symbol
ε#$% / ε$%# / ε%#$ / #, ε%$# / ε#%$ / ε$#% / 0#, ε##$ / ε#%# /
ε$$$ / . . . / 1Useful in evaluatingdeterminants and vector cross0products
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
=
≠
==δ
100
010
001
,0
)(,1
jiif
sumno jiif ij
3,
,
,
1,3
=δδ=δ
=δ=δ
=δ=δ
=δ=δ
δ=δ
ijijiiijij
ijik jk ik jk ij
jiiji jij
iiii
jiij
aa
aaaa
aaaa
−+
=εotherwise,0
3,2,1of n erm!tatioo""anisif ,1
3,2,1of n erm!tatioevenanisif ,1
ijk
ijk
ijk
321321
333231
232221
131211
##]"et[ k jiij k k jiijk ijij aaaaaa
aaa
aaa
aaa
aa ε=ε===

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 6/19
Coordinate Trans+ormations
&
e′
#
e′
%
e′
$
e%
e$e#
x 3
x #
x $
x ′
#
x ′
$
x ′
3 To express elasticity variables in
dierent coordinate systems re)uiresdevelopment of transformation rulesfor scalar, vector, matrix and higherorder variables 2 a concept connected"ith basic denitions of tensorvariables. The t"o 3artesian frames4 x #,x $,x %5 and dier only
by orientationUsing 6otation7atrix
transformationla"s for3artesian vectorcomponents
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
),,( 321 x x x ′′′
),cos( jiij x xQ ′=
3332321313
3232221212
3132121111
eeee
eeee
eeee
QQQ
QQQ
QQQ
++=′
++=′++=′
jiji Q ee =′
j jii Q ee ′=
ii
ii
vvvv
vvvv
eeee
eeeev
′′=′′+′′+′′==++=
332211
332211 jiji vQv =′
j jii vQv ′=

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 7/19
Cartesian Tensorseneral Trans+ormation a.sScalars, vectors, matrices, and higher order )uantities can berepresented by an index notational scheme, and thus all)uantities may then be referred to as tensors of dierent orders. The transformation properties of a vector can be used toestablish the general transformation properties of these tensors.
6estricting the transformations to those only bet"een 3artesiancoordinate systems, the general set of transformation relationsfor various orders are:
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
or"er %eneral
or"er fo!rth,
or"er thir",
(matrix)or"er secon",
(vector)or"er first,
(scalar)or"er &ero,
...... t pqr mt kr jqipmijk
pqrslskr jqipijkl
pqr kr jqipijk
pq jqipij
pipi
aQQQQa
aQQQQa
aQQQa
aQQa
aQa
aa
⋅⋅⋅=′
=′
=′
=′
=′=′

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 8/19
Example 1-2 Transformation ExamplesThe components of a first and second order tensor in a particular coordinate frame are given by
8etermine the components of each tensor in a ne"coordinate system found through a rotation of 91o 4π9radians5 about the x %0axis. 3hoose a countercloc'"ise
rotation "hen vie"ing do"n the negative x %0axis, see
;igure #0$. The original and primed coordinate systems are sho"n in;igure #0$. The solution starts by determining therotation matrix for this case
The transformation for the vector )uantity follo"s from e)uation4#.<.#5$
and the second order tensor 4matrix5 transformsaccording to 4#.<.#5%
x 3
x #
x $
x ′
#
x ′
$
x ′
3
91o
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
=
=
423
220
301
,
2
4
1
iji aa
−=
°°°
°°°°°°
=
100
02'12'302'32'1
0cos90cos90cos
90cos60cos10cos90cos30cos60cos
ijQ
−+
=
−==′
2
2'32
322'1
2
4
1
100
02'12'3
02'32'1
jiji aQa
−+−
+=
−
−==′
42'33132'3
2'3314'4'3
32'34'34'7
100
02'12'3
02'32'1
423
220
301
100
02'12'3
02'32'1T
pq jqipij aQQa

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 9/19
Principal Val#es and$irections +or Symmetric
Second Order Tensors The direction determined by unit vector n is said to be a principaldirection or eigenvector of the symmetric second order tensor aij
if there exists a parameter λ 4 principal value or eigenvalue5 suchthat
6elation is a homogeneous system of three linear algebraic
e)uations in the un'no"ns n#, n$, n%. The system possessesnontrivial solution if and only if determinant of coe(cient matrixvanishes
scalars Ia, IIa and IIIa are called the fundamental invariants of
the tensor aij
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
i jij nna λ= 0)( =λδ− jijij na
0]"et[ 23 =+λ−λ+λ−=λδ− aaaijij III II I a
]"et[
)(2
1
3331
1311
3332
2322
2221
1211
332211
ija
ijij jjiia
iia
a III
aa
aa
aa
aa
aa
aaaaaa II
aaaa I
=
++=−=
++==

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 10/19
Principal )xes o+ Second Order Tensors
+t is al"ays possible to identify a right0handed 3artesian
coordinate system such that each axes lie along principaldirections of any given symmetric second order tensor. Suchaxes are called the principal axes of the tensor, and the basisvectors are the principal directions =n4#5, n4$5 , n4%5>
x 3
x 1
x /
Principal )xesOri*inal i&en )xes
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
λλ
λ=
3
2
1
00
00
00
ija
=
333231
232221
131211
aaa
aaaaaa
aij

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 11/19
Example 1-0 Principal Val#eProblem
8etermine the invariants, and principal values anddirections of
;irst determine the principal invariants
The characteristic e)uation then becomes
Thus for this case all principal values aredistinct;or the λ# / < root, e)uation 4#.9.#5 gives the
system
"hich gives a normali*ed solution
+n similar fashion the other t"o principal directions arefound to be+t is easily veried that these directions are mutually orthogonal.ote for this case, the transformation matrix Qij dened by 4#.?.#5
becomes
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
−
=
340
430
002
ija
0)169(2
340
430
002
262630
02
34
43
30
02
,2332
−=−−=−
=
−=−−=−+−+==−+==
a
aiia
III
II a I
,2,
0)2)(2(0022]"et[
321
223
−=λ=λ=λ∴
=−λ−λ⇒=−λ+λ+λ−=λδ− ijija
084
042
03
)1(
3
)1(
2
)1(
3
)1(
2
)1(
1
=−
=+−
=−
nn
nn
n
)2(
132
)1(een +±=
1)2( en ±= )2(
132)3( een −±=
⇒
−
=
'2'10
001
'1'20
ijQ
−=′
00
020
00
ija

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 12/19
Vector, Matrix and Tensor )l*ebra
Scalar or $ot Prod#ct
Vector or Cross Prod#ct
Common Matrix Prod#cts
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
iibabababa =++=⋅ 332211ba
ik jijk ba
bbb
aaa e
eee
ba ε==×
321
321
321
iijiji
T
ij j jij
a A Aa
Aaa A
===
===
][*
]*[
Aa Aa
a A Aa
T
ijij
jiij
jk ji
kjij
jk ij
B Atr tr
B Atr
B A B A
B A
==
=
==
==
)()(
)(
]][[
B A AB
AB
B A AB
B A AB
T T
T
T
T QaQa =′
⇒=′ pq jqipij aQQa
@a"tion Transforma
ArderSecond

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 13/19
Calc#l#s o+ CartesianTensors
;ield concept for tensor components
Comma notation for partial dierentiation
+f dierentiation index is distinct, order of the tensor "ill beincreased by one- e.g. derivative operation on a vector producesa second order tensor or matrix
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
)()(),,(
)()(),,(
)()(),,(
321
321
321
x
x
x
ijiijijij
iiiii
i
a xa x x xaa
a xa x x xaa
a xa x x xaa
===
===
===
,,, ,,, ij
k
k iji
j
ji
i
i a x
aa x
aa x
a∂∂
=∂∂
=∂∂
=
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂ ∂
∂
∂
∂
∂
∂
=
3
3
2
3
1
3
3
2
2
2
1
2
3
1
2
1
1
1
,
x
a
x
a
x
a
x
a
x
a
x
a x
a
x
a
x
a
a ji

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 14/19
Vector $ierentialOperations
$irectional $eri&ati&e o+ Scalar 2ield
Common $ierential Operations
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
f ds
dz
z
f
ds
dy
y
f
ds
dx
x
f
ds
df
∇⋅=∂
∂
+∂
∂
+∂
∂
= n
321 eeends
dz
ds
dy
ds
dx s ++== of directioninvectornormalunit
z y x ∂∂
+∂∂
+∂∂
==∇ 321 eeeoperatoraldierentivector
z
f
y
f
x
f f f f ∂
∂+∂
∂+∂
∂===∇ 321 eee grad functionscalarof gradient
i,
2
i,
,
,
2
+i,
i
e!
e!
!
ee!
e,
kk i
jk ijk
ii
ii
ji
i
uVector aof Laplacian
uVector aof url
uVector aof !iver"ence#calar aof Laplacian
uVector aof $radient
#calar aof $radient
=∇
ε=×∇
=⋅∇ φ=φ∇⋅∇=φ∇
=∇φ=φ∇

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 15/19
Example 1-34 ScalarVector 2ieldExample
Scalar and vector eld functions are given by
3alculate the follo"ing expressions, ∇φ, ∇$φ,∇
B u,
∇u, ∇ × u.
Using the basic relations:
∇φ∇$φ
∇ B u
∇u
∇ × u
-10 -5 0 5 10-10
-8
-6
-4
-2
0
2
4
6
8
10
3ontours φ/constant and vector distributions of∇φ
vector eld ∇φ is orthogonal to φ0contours 4ture in genera
x
y
0 4satises @aplace e)uation5
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
22 y x −=φ 321 eeeu xy yz x ++= 32
21
321
21
ee
eee
ee
y y x
xy yz x
z y x
x y
y z u
z z
y x
ji
−−=∂∂∂∂∂∂=
==
+=++=
=−=
−=
)3(
32
'''
0
330
00232032
022
22
,
7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 16/19
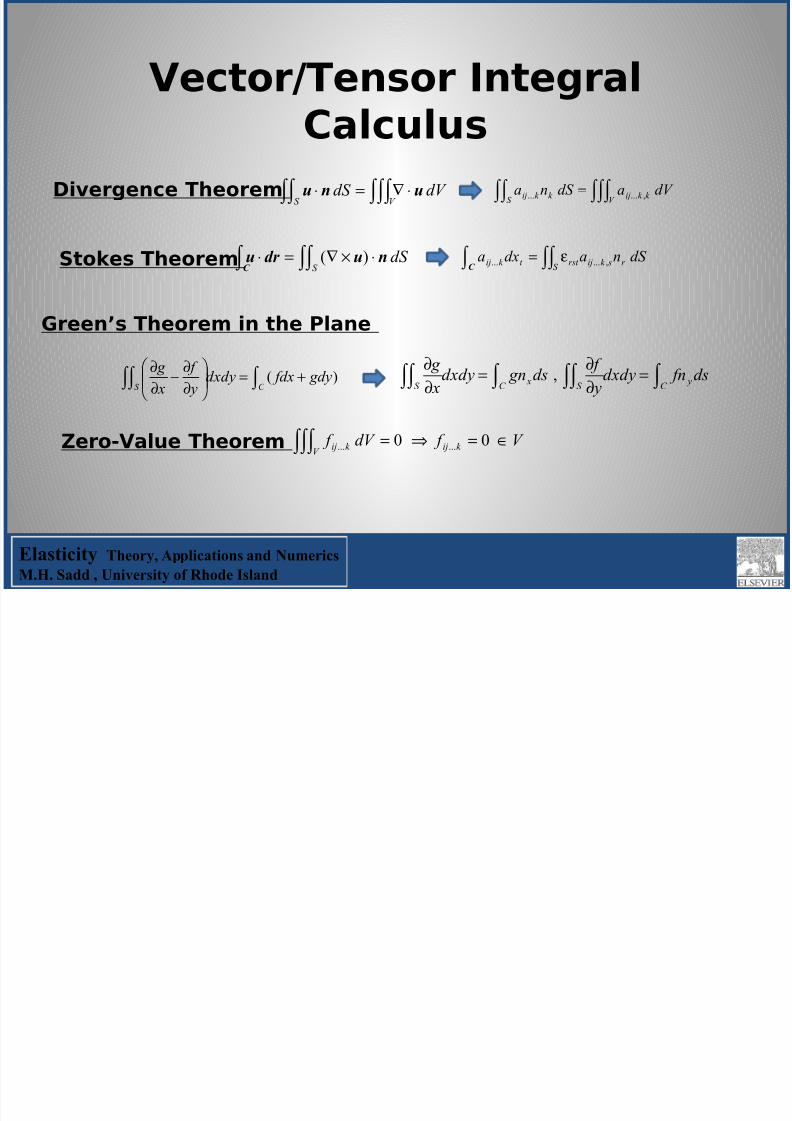
VectorTensor Inte*ral
Calc#l#s$i&er*ence Theorem
Sto(es Theorem
reen5s Theorem in the Plane
6ero-Val#e Theorem
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
dV d# # V ∫∫ ∫∫∫ ⋅∇=⋅ unu dV ad# na
# V k k ijk k ij∫∫ ∫∫∫ = ,......
∫∫ ∫ ⋅×∇=⋅#
d# nudr uC
)( ∫∫ ∫ ε=#
r sk ijrst t k ij d# nadxa C
,......
V f dV f k ijV
k ij ∈=⇒=∫∫∫ 00 ......
∫ ∫∫ +=
∂∂
−∂∂
# "dy fdxdxdy
y
f
x
" )( ∫ ∫∫ ∫ ∫∫ =
∂∂
=∂∂
y
# x
# ds fndxdy
y
f ds "ndxdy
x
" ,
7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 17/19
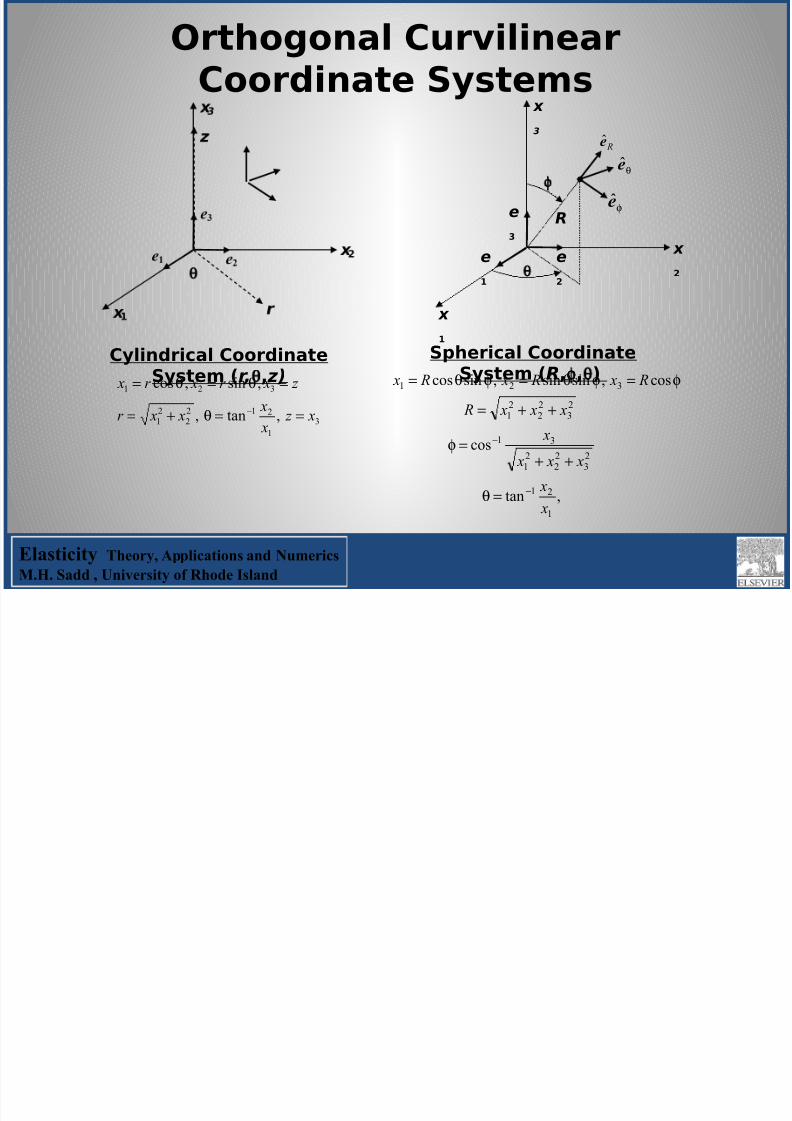
Ortho*onal C#r&ilinearCoordinate Systems
Cylindrical CoordinateSystem 7r, , z)
Spherical CoordinateSystem 7R,
,
8
e
0
e
/
e
1
x
3
x
1
x
/
R
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
,tan
cos
cos,sinsin,sincos
1
21
23
22
21
31
2
3
2
2
2
1
321
x
x
x x x
x x x x %
% x % x % x
−
−
=θ
++=φ
++=
φ=φθ=φθ=
3
1
212
2
2
1
321
,tan,
,sin,cos
x z x
x x xr
z xr xr x
==θ+=
=θ=θ=
−
%e
φe
θe

7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 18/19
eneral C#r&ilinearCoordinate Systems
Common $ierential 2orms
Elasticity Theory, Applications and NumericsM.H. Sadd , University of Rhode Island
233
222
211
2 )()()()( ξ+ξ+ξ= d &d &d &ds
iii &&&& ξ∂
∂=
ξ∂∂
+ξ∂∂
+ξ∂∂
=∇ ∑ 1
1
1
1
33
322
211
1 i eeee
i
ii
f
&
f
&
f
&
f
& f
ξ∂∂
=ξ∂
∂+
ξ∂∂
+ξ∂
∂= ∑ 1
1
1
1
3
3
32
2
21
1
1 i eeee
∑
ξ∂
∂=⋅ ><
i
i
i
i u
&
&&&
&&&
321
321
1u
∑
ξ∂φ∂
ξ∂∂
=φ∇i
i
i
i &
&&&
&&& 2
321
321
2
)(
1
∑∑∑ ><ξ∂∂ε
=×i
i
j k
k k j
k j
ijk &u
&&eu )(
∑∑
ξ∂
∂
+ξ∂
∂
= ><
><
i j ji
j
iu
u
& i
j
j
i e
e
e
u
∇
ξ∂
∂+
ξ∂
∂⋅
ξ∂∂
=∇ ∑∑∑ ><><
j k
jk
j
k ii
i
uu
&& k
j
j
k i e
eee
u
2
),,(,),,( 321321 ξξξ=ξ=ξ mmmm x x x x x
7/23/2019 Slides Chapter 1 Mathematical Preliminaries
http://slidepdf.com/reader/full/slides-chapter-1-mathematical-preliminaries 19/19
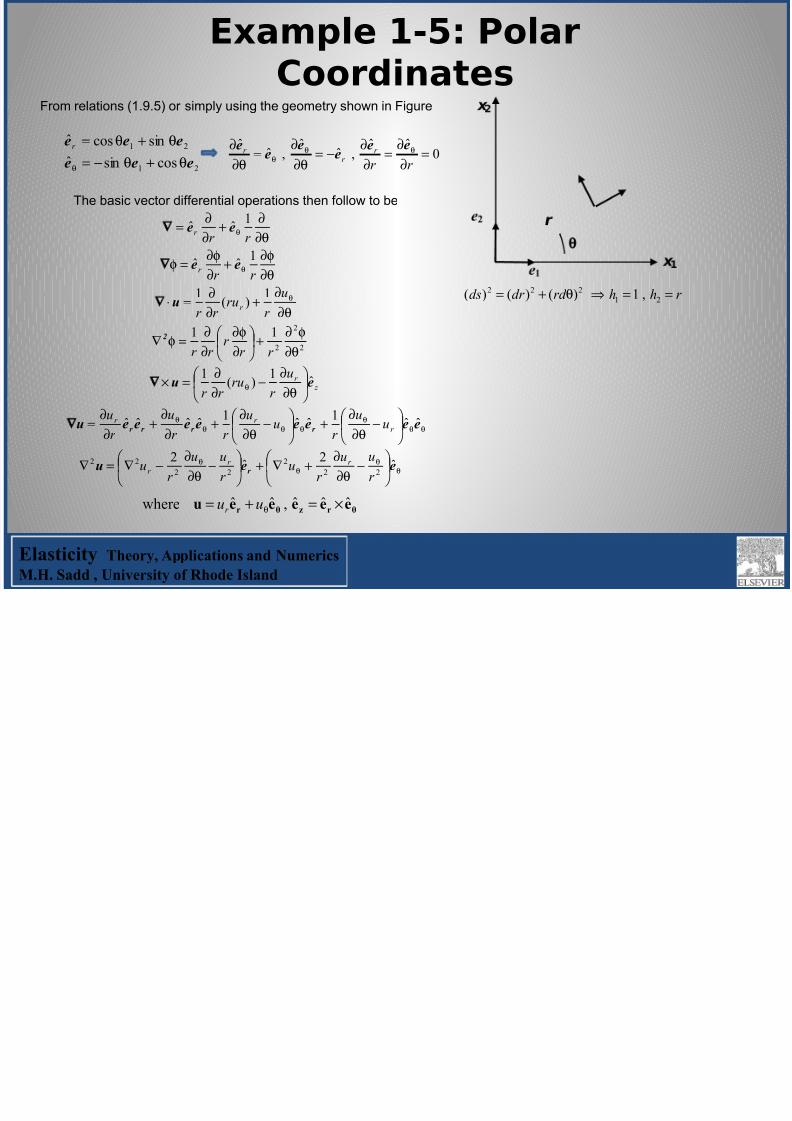
Example 1-94 PolarCoordinates
From relations ".#.$% or simply using the geometry shown in Figure
The basic vector differential operations then follow to be
Elasticity Theory, Applications and NumericsM H Sadd University of Rhode Island
r &&rd dr ds ==⇒θ+= 21
222 ,1)()()(
21
21
cossinsincos
eee
eee
θ+θ−=θ+θ=
θ
r 0
,
,
=∂∂=
∂∂−=
θ∂∂=
θ∂∂ θθ
θr r
r r
r eee
ee
e
θθ
θθ
θθθ
θθθθ
θ
θ
θ
θ
−
θ∂∂
+∇+
−
θ∂∂
−∇=∇
−
θ∂∂+
−
θ∂∂+
∂∂+
∂∂=
θ∂∂
−∂∂
=×
θ∂φ∂
+
∂φ∂
∂∂
=φ∇
θ∂∂
+∂∂
=⋅θ∂
φ∂+
∂
φ∂=φ
θ∂∂
+∂∂
=
eeu
eeeeeeeeu
eu
u
ee
ee
r
r r r r
2
2
2
11
1
)(1
11
1)(
1
1
1
22
2
22
22
2
2
2
r
uu
r u
r
uu
r u
uur
uur r
ur
u
u
r ru
r r
r r r
r r
u
r ru
r r
r r
r r
r r r
r r r
z r
r
r
r
∇
∇
∇
∇
∇
r!reeeeeu , where ×=+= θuur