Embed Size (px)
DESCRIPTION
Signal Processing and Information Fusion with Networked Sensors. Pramod K. Varshney Electrical Engineering and Computer Science Dept. Syracuse University [email protected]. - PowerPoint PPT Presentation
Citation preview

1
Signal Processing and Information Fusion with Networked Sensors
Pramod K. VarshneyElectrical Engineering and Computer Science Dept. Syracuse [email protected]
This research was supported by ARO under Grant W911NF-09-1-0244 and U.S. Air Force Office of Scientific Research (AFOSR) under Grant FA9550-10-1-0263

22
Overview Sensor Networks and Information Fusion
● Information collection from distributed heterogeneous sensors
● Radar sensor networks● Bi-static/Multi-static/MIMO radars not the focus here
Signal processing hot topics!● Inference in the presence of resource constraints● Fusing heterogeneous, correlated data
Conclusion

33
WSNs integrate a large number of low cost computationally-limited processors.
These processors have flexible interfaces allowing various sensors to be networked.
Fusion Center
Ad Hoc Network Topology
Sensor andLocal processor
Wireless Sensor Networks

55
Radar Networks for Homeland Security
[1] Nohara, T.J.; Weber, P.; Jones, G.; Ukrainec, A.; Premji, A.; , "Affordable High-Performance Radar Networks for Homeland Security Applications," Radar Conference, 2008. RADAR '08. IEEE , pp.1-6, 26-30 May 2008

66
Networked radar - Precipitation imaging
Measurement at each radar node
Networked retrieval
[2] V.Chandrasekar, “Ground-based and Space-based Radar Precipitation Imaging” www.math.colostate.edu/~estep/cims/imaging/talks/Chandrasekar.ppt

77
Typical Signal Processing Scenario Addressed

88
Signal Processing Hot Topics! Inference driven management in sensor networks
● Sensor selection for source localization● Sensor selection for object tracking● Bandwidth management for object tracking, etc
Heterogeneous data fusion in sensor networks● Copula based framework

99
Inference Driven Management in Sensor Networks
Determining the optimal way to manage system resources and task a group of sensors to collect measurements for statistical inference.

1010
Motivation State of the art sensor management approaches are based
on posterior entropy or mutual information [3-5].
Information theoretic measures suffers from● Complexity exponential in the number of sensors to be
managed● Lack of direct link to estimation performance
Adaptive sensor management based on the fundamentally new recursive conditional PCRLB on MSE [6]● Complexity linear in number of sensors when sensor noises
are independent● Provides a lower bound on MSE for any nonlinear Bayesian
filter[3] Zhao, Shin, and Reich, IEEE SPM, 2002. [4] Kreucher, Hero, Kastella, and Morelande, Proc. of IEEE, 2007. [5] Williams, Fisher, and Willsky, IEEE T-SP, 2007. [6] Zuo, Niu, and Varshney, IEEE T-SP, 2011.

11
Background - Fisher Information and PCRLB
1212
Why Conditional PCRLB ? Unconditional PCRLB: FIM derived by taking
expectation with respect to the joint distribution of the measurements and the object states, which makes the PCRLB an off-line bound.
● Independent of any specific realization of the state track, so it can not reflect the online state estimation performance for a particular realization very faithfully.
Solution: the conditional PCRLB [6] is dependent on the past observed data and hence implicitly dependent on the state track up to the current time. Hence an on-line bound.[6] Zuo, Niu, and Varshney, IEEE T-SP, 2011.

1313
Conditional Posterior Cramer-Rao lower Bound

1414
Sensor Selection for Source Localization Problem Formulation [7]:
● Signal amplitudes follow an Isotropic power attenuation model.
● Noisy signal is quantized locally and transmitted to a FC.
Instead of requesting data from all the sensors, fusion center iteratively selects sensors for source localization● First, a small number of anchor sensors
send their data to the fusion center to obtain a coarse location estimate.
● Then, at each step a few (A) non-anchor sensors are activated to send their data to the fusion center to refine the location estimate iteratively.
[7] Masazade, Niu, Varshney, and Keskinoz, IEEE T-SP, 2010

1515
Complexity of the MI and C-PCRLB
1616
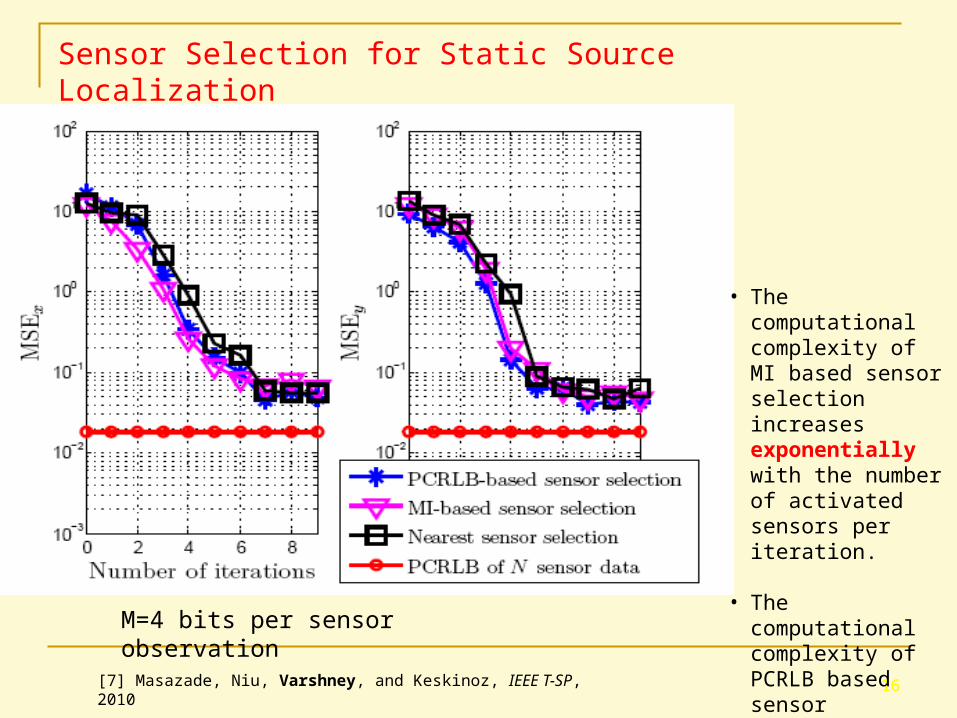
Sensor Selection for Static Source Localization
M=4 bits per sensor observation
• The computational complexity of MI based sensor selection increases exponentially with the number of activated sensors per iteration.
• The computational complexity of PCRLB based sensor selection
increases linearly with the number of activated sensors per iteration.
[7] Masazade, Niu, Varshney, and Keskinoz, IEEE T-SP, 2010

1717
Sensor Selection for Object Tracking Problem Formulation [8-9]:
● 30 bearing-only sensors randomly deployed in a surveillance area
● An object moves in the field according to white noise acceleration model.
● At each time step, two sensors are activated to transmit bearing readings of the object to the fusion center, to minimize the C-PCRLB
Comparison with other approaches:● Information-driven approach based on maximum MI● PCRLB with renewal strategy [10]● Nearest neighbor approach
[8] Zuo, Niu, and Varshney, ICASSP, 2007. [9] Zuo, Niu, and Varshney, ICASSP, 2008.
[10] Hernandez, Kirubarajan, and Bar-Shalom, IEEE T-AES, 2004.

1818
Numerical Results: Object Trajectories

1919
Numerical Results: RMSEs
2020
Fusion of Heterogeneous Signals Statistical dependence is either ignored or not
adequately considered● How do we characterize dependence?● How do we include it in the distributed inference
algorithms?
We develop a copula theory based approach for a variety of distributed inference problems

21

22

2323
Copula Theory Copulas are functions that couple marginals to form a
joint distribution Sklar’s Theorem is a key result – existence theorem

24
Differentiate the joint CDF to get the joint PDF
N marginals(E.g., from N sensors)
Uniform random variables!Copula density
Product density
Independence
Copula Theory

2525
-2-1
01
2
-2
0
20
0.05
0.1
0.15
0.2
Bivariate Normal, = 0.5
-2 -1.5 -1 -0.5 0 0.5 1 1.5 2-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
-2-1
01
2
0
5
100
0.02
0.04
0.06
Bivariate density: Normal and Gamma MarginalsGumbel Copula = 2
-2 -1.5 -1 -0.5 0 0.5 1 1.5
1
2
3
4
5
6
7
8
9
10

2626
Summary of Copula Functions Copulas are typically defined as a CDF Elliptical copulas: derived from multivariate distributions
Archimedean Copulas
Gaussian copulat-copula

2727
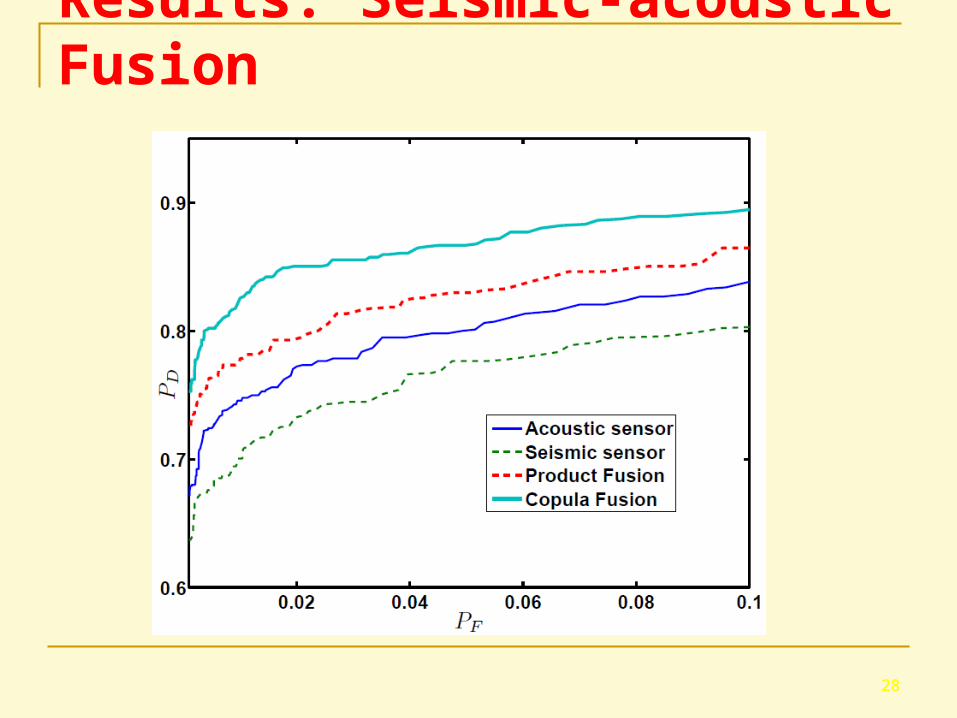
Copula-based Hypothesis Testing
Copula based test-statistic decouples marginal and dependency information
Information theoretic analysis & detailed formulation of copula-based signal inference*
[11] Iyengar, Varshney, and Damarla, IEEE T-SP, 2011
GLR under independenceDependence term
2828
Results: Seismic-acoustic Fusion

2929
Ongoing and Future Work Inference driven management in sensor networks
● Relationship between information theoretic and estimation theoretic measures
● Sensor management by optimizing multiple objectives● Non-myopic (multi-step-ahead) sensor management● Channel-aware sensor/resource management
Heterogeneous data fusion in sensor networks● Fusion of multimodal sensors and homogeneous sensors● Multi-algorithm Fusion, e.g., multi-biometrics ● Multi-classifier Fusion – Fusing different classifiers


























![System Architecture Directions for Networked Sensors[1]](https://img.dokumen.tips/doc/110x75/61ec76b9aba3ee09942ff7a8/system-architecture-directions-for-networked-sensors1.jpg)


