Embed Size (px)
Citation preview

from research .… to market
Safety of collaborative roboticsopen issues 2018
Federico Vicentini
Assemblaggio 4.0 – Automazione Integrata18 settembre 2018

Enterprises Universities R&D Institutes & Centers Industrial Associations, Organizations
About 150 Europeanstructured collaborations with:
CNR STIIMA

robotics
industrial
medical

robotics
industrial
medical

Federico Vicentini
Researcher at CNR-STIIMA
PhD Mechanical Systems Engineering (2007), MS Mechanical Engineering (2003)
Robot safety, human-robot interaction and distributed automation systems
Member ISO TC 299 / WG3 Industrial Safety
Member ISO TC 199 / WG12 Human-Machine physical Interaction
Coordinator UNI/CT24/GL09 Robots and Robot Systems
Diclaimer: no conflicts of interest; statements do not necessarily reflects opinions of Organizations or Funding Bodies

Matteo Giussani, Niccolò Iannacci

Dynamic, optimized SSM

How can I ensure that head and neck of operators are not touched?
Is it acceptable that the head is in the range of motion of a collaborative robot?
No, you cannot. It’s fenceless.
It can be acceptable. After some work.
It’s risk assessment, baby!
FAQs

risk analysis
risk estimation
risk evaluation
intended use
hazard identification
risk reduction
verification
deployment
validation
execution
impatti: pericoli ed effetti
rischio residuo
obiettivi e specifiche della applicazione
misure complementari
test e misurazioni

courtesy of ABBcourtesy of Universal Robots/SHAD
esempi

hazards and risks
background

need presence?
hazard identification (contact)
risk estimation (effects of contact)
contact-less mode limited energy mode
limited effects?
low risk?
change specs?
non-collaborative
specs
validation
Y
Y
Y
N
N
N
Y
N

need presence?
hazard identification (contact)
risk estimation (effects of contact)
contact-less mode limited energy mode
limited effects?
low risk?
change specs?
non-collaborative
specs
validation
Y
Y
Y
N
N
N
Y
N
<150 200 250 >250
N/cm2

need presence?
hazard identification (contact)
risk estimation (effects of contact)
contact-less mode limited energy mode
limited effects?
low risk?
change specs?
non-collaborative
specs
validation
Y
Y
Y
N
N
N
Y
N
pain
contact
injury
energy reduction

need presence?
hazard identification (contact)
risk estimation (effects of contact)
contact-less mode limited energy mode
limited effects?
low risk?
change specs?
non-collaborative
specs
validation
Y
Y
Y
N
N
N
Y
N

Stima e valutazione del rischio:
Conoscere ed analizzare la applicazione (non il robot)
Calcolare/stimare gli effetti dei contatti
Calcolare/stimare le probabilità dei contatti
Applicare le funzioni di sicurezza
Agire sul layout e sulle dotazioni complementari
riassunto

Stima e valutazione del rischio:
Conoscere ed analizzare la applicazione (non il robot)
Calcolare/stimare gli effetti dei contatti
Calcolare/stimare le probabilità dei contatti
Applicare le funzioni di sicurezza
Agire sul layout e sulle dotazioni complementari
.. Chi garantisce che è corretto?
… Quali strumenti possono essere usati?
.. Esistono procedure standard?
riassunto

safety validation
testing effectively

risk analysis
risk estimation
risk evaluation
intended use
hazard identification
risk reduction
verification
deployment
validation
execution
impatti: pericoli ed effetti
rischio residuo
test e misurazioni

courtesy of DGUV courtesy of DGUV

example impact (hand on desk edge)

environmentconditions
equipment setup
accuracy and precision
scalability
confidence
consistency
configuration of end effector
Configuration of arm
occlusions and reactions
templatemovements
courtesy of TUV Austria, Johanneum
validation

Validation is expensive.
Outputs need to be comparable.
Numerical outputs vs. risk evaluation: guidelines are welcome!

safearoundrobots.com
The TOOLKIT:web-based services for finding normative requirements, specifications, procedures, …on-stop-shop for safety rules
The PROTOCOLS:Standardized procedures for easy test of safety functions and behaviors. To be used for certification, TUV verification, ethical committees, OSH inspection, .. cost-saving, consensus-based, methods for providing evidences
The CALLS:Cascade funding: 5.5 M€ for experiments. Propose your procedure for - Testing your new device/system- New methods for validating applicationsUp to 60 k€/experiment3 Calls: Feb 2019 + Nov 2019 + Jun 2020
/company/covrproject

final remarks

validation
mobile roboticspredictive methods
CA-RA
insurance
data & statistics(probabilities)
data & statistics(contacts)
software
hot topics in safety
Protocols and procedures fopr testing
and validation. Shared and accepted.
Contact/impact data, possibly involving
experiments with humans.
Recording and analysis of human errors,
patterns and behaviors.
Data-oriented knowkedge of robot
safety
Insurance
Automatic tools for risk estimation
along reconfigurations

la normativa tecnica è determinante per l’analisi del rischio
è importante partecipare all’attività normativa (UNI/CT24/GL09)
principi di sicurezza dinamica: possibile combinare e variare le funzioni impiegate
raccogliere e sistematizzare dati di comportamento ed interazione
[email protected] us at CNR – via Alfonso Corti 12, Milano (a.k.a. COVR Shared Facility)
/company/covrprojectsafearoundrobots.com

Assemblaggio 4.0 e robotica collaborativaAndrea Zanchettin
18 settembre 2018

Industria 4.0
Quadro di insieme e stato attuale

Assemblaggio 4.0 e robotica collaborativa
Industria 4.0: le tecnologie abilitanti
4
Industria 4.0: Le tecnologie abilitanti
12
345
98
76
• Robot collaborativi interconnessi e rapidamente programmabili
• Simulazione tra macchine interconnesse per ottimizzare i processi• Integrazione informazioni lungo la catena del valore
dal fornitore al consumatore
• Realtà aumentata a supporto dei processi produttivi
• Stampanti in 3D connesse a software di sviluppo digitali
Simulation
Horizontal/Vertical Integration
Augmented Reality
Additive Manufacturing
• Comunicazione multidirezionale tra processi produttivi e prodotti
• Analisi di un' ampia base dati per ottimizzare prodotti e processi produttivi
• Gestione di elevate quantità di dati su sistemi aperti
• Sicurezza durante le operazioni in rete e su sistemi aperti
Industrial Internet
Big Data and Analytics
Cloud
Cyber-security
Advanced Manufact.Solutions

Assemblaggio 4.0 e robotica collaborativa
Cosa cercano le imprese?
Fonte:NetworkDigital3602017

Assemblaggio 4.0 e robotica collaborativa
Utilizzo di almeno una tecnologia 4.0
0%
10%
20%
30%
40%
50%
60%
Totale Micro Piccola Media Grande
Italia Centro-Nord Mezzogiorno
Fonti:MET2018,ISTAT2011
95.2% 4.2% 0.5% 0.1%

Assemblaggio 4.0 e robotica collaborativa
Industria 4.0 e fatturato
0%
10%
20%
30%
40%
50%
60%
Tradizionali Tradizionaliconinterventi4.0 4.0
Aumento Stabile Calo
Fonte:MET2018

Robotica collaborativa
Che cos’è e perché conviene

Assemblaggio 4.0 e robotica collaborativa
Perché un robot collaborativo?Flessib
ilità
Throughput/Costo
Lavoro manuale
Automazione rigidaAutomazione Collaborativa
+robot
+operatore

Assemblaggio 4.0 e robotica collaborativa
Industrial Robot
RobotEquipmentCommissioning
Collaborative Robot
Perché un robot collaborativo?

Assemblaggio 4.0 e robotica collaborativa
Perché un robot collaborativo?
0
200
400
600
800
1000
1200
1400
2015 2016 2017* 2018* 2019* 2020* 2021* 2022* 2023* 2024* 2025*
Migliaia
Roboticatradizionale Roboticacollaborativa
Entro il2025 un
robot su tresarà per
applicazionicollaborative.
Fonte:LoupVentures,2017

Assemblaggio 4.0 e robotica collaborativaDi cosa parleremo oggi

Assemblaggio 4.0 e robotica collaborativa
Quanto è difficile programmare un robot collaborativo?
Cosìsemplice cheanche ilresponsabilemarketing lo può fare.

Assemblaggio 4.0 e robotica collaborativa
Interpretazione del comportamento umano
Operatore:Eccellente nella risoluzione diproblemi
Capace diinterpretare il contesto
Robot:Eccellente inoperazioni ripetitiveVeloce epreciso
… èvero?Verifichiamo!

Assemblaggio 4.0 e robotica collaborativa
Motivations and challenges

Assemblaggio 4.0 e robotica collaborativa
Quanto è sicuro un robot collaborativo?

Assemblaggio 4.0 e robotica collaborativa
Il futuro della robotica collaborativa (secondo me)
Leanassemblystation
Collaborativeassemblystation
+robot


Percezione e predizione dell’operatore per applicazionidi assemblaggio collaborativo
Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Paolo Rocco

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Sommario
Gli assemblaggi collaborativi Percezione e predizione del movimento dell’uomo Ergonomia nella collaborazione uomo-robot Predizione dell’intenzione dell’uomo Robotica collaborativa intelligente

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Source: ABB Corporate Research
Assemblaggi collaborativi

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Il laboratorio MERLIN

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Percezione e predizione dell’operatore
Predizione dei volumi occupatidall’operatoreSistema di visione
Trackingscheletale

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Normativa di sicurezza: speed and separation monitoring
ISO/TS 15066 – Safety of Collaborative Robots

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Scalatura della velocità ottimizzata per la sicurezza
Soluzione di un problema di ottimizzazione
Scalaturadella velocità
Sorveglianza dello spazio di lavoro
messaggi TCP
Predizione del moto umano

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Scalatura della velocità ottimizzata per la sicurezza
Applicazione: ispezione, cambio formato
https://www.youtube.com/watch?v=Z7DgzHC9e9E

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Scalatura della velocità ottimizzata per la sicurezza
Applicazione: operazioni di servizio in ambito farmaceutico/medicale
https://www.youtube.com/watch?v=J4jqszRMuew&t=9s

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
MotivazioniMolte operazioni tecnologiche sono oggi effettuate manualmente e in condizioni scomode
perforazione
rivettatura
La robotica collaborativa può essere di aiuto in queste situazioni
Ergonomia nella collaborazione uomo-robot

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Scenario applicativoCo-manipolazione di oggetti ingombranti
Non ergonomica Non sicura (occlusione) Non sicura (alta velocità del robot)
Ergonomia nella collaborazione uomo-robot

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
L’uomo viene inquadrato da telecamere 3D
Il robot porge all’uomo l’oggetto nella posizione ergonomicamente più favorevole
Buona accettazione da parte dei volontari
Ergonomia nella collaborazione uomo-robot

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Predizione dell’intenzione dell’uomo
Notazioni:
• Posizione della mano (centro del polso):
• Direzione del moto della mano (versore tangente):
• Posizione target:
Attraverso un sistema di visione il robot è in grado di dedurre l'intenzione dell'operatore umano e decidere l'azione più conveniente da eseguire in base al compito collaborativo.

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Predizione del target
Measurement
Prediction based on model #1Prediction based on model #2

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Predizione del target
L’uomo ha preso la scatola (il robot
prenderà il coperchio)
L’uomo ha preso il coperchio o è passato un tempo limite (il robot prenderà la scatola)

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Applicazione: assemblaggio collaborativo
p = 0.90
p = 0.10
https://www.youtube.com/watch?v=P1p1-hejjaQ

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Le attività umane di norma si sviluppano secondo certe sequenze. Per esempio:.
svegliarsi ----> prendere il caffè ----> vestirsi ----> andare al lavoro
È possibile predire le prossime attività?
Probabilità(prendere il caffè | svegliarsi) = alta
Nei processi manifatturieri (e in particolare negli assemblaggi) la prossima attività non dipende solamente dall’attività corrente, ovvero il processo ha memoria (la sequenza di assemblaggio). Vogliamo quindi stimare la prossima attività sulla base delle ultime n osservazioni:
Probabilità(Ak | Ak-1, ..., Ak-n) = ?
Stima di sequenze di attività

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Stima di sequenze di attività

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Stima di sequenze di attività

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Stima di sequenze di attività
assemble
pick
???
https://www.youtube.com/watch?v=yHK2vXf0mrk

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
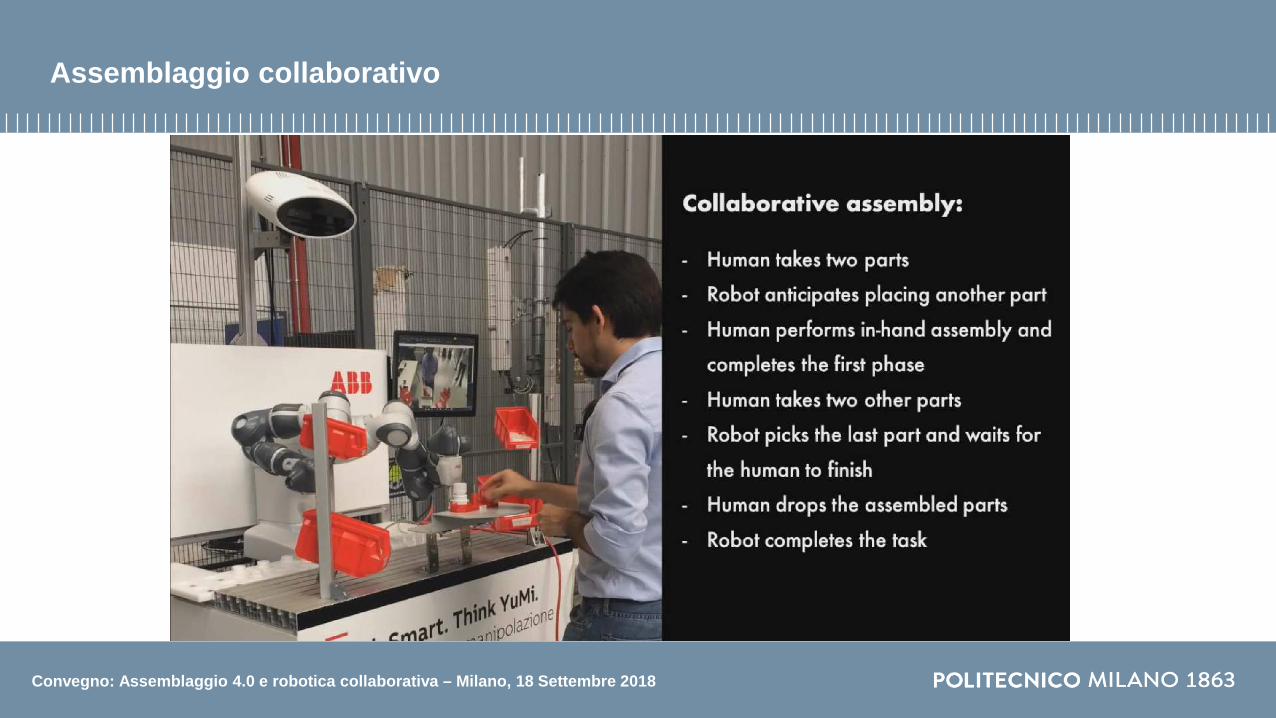
Assemblaggio collaborativo
Benefici: riduzione cycle time del 20%, flusso continuo dei materiali (no idle time), diminuzione del lead time (storage più contenuti).
Il robot percepisce l'essere umano e predice quando è necessaria assistenza. Nel frattempo, continua a fare il suo lavoro.
Di conseguenza, il robot è sempre pronto ad aiutare e la produttività è massimizzata.
https://www.youtube.com/watch?v=KG7WLNdi8Uw
Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Assemblaggio collaborativo

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Smart robots

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Smart Robots: dalla ricerca all’impresa
Sistema di percezione avanzatoSmart Robots combina le capacità percettive e direasoning in un singolo oggetto consentendo dimappare in tempo reale l’area di lavoro.
Human-Robot InteractionCondivisione efficiente dell’area di lavoro. SmartRobots riconosce le persone e calcola in real-timetraiettorie alternative per evitare contatti emantenere l’efficienza del processo produttivo.
Ottimizzazione in tempo realeDecisione in tempo reale quale operazioneeffettuare in base a posizionamento e azioni dellapersona nell’area di lavoro.
Comandi GestualiOperatore può decidere in tempo reale cheoperazione (o sequenza di operazioni) assegnare alrobot comandandolo tramite gesti o decidere diarrestare il movimento.
Smart Robots ha sviluppato un dispositivo smart che permette una gestione ottimale degli spazi in cui operatori umani e robot lavorano fianco a fianco.

Convegno: Assemblaggio 4.0 e robotica collaborativa – Milano, 18 Settembre 2018
Smart Robots: dalla ricerca all’impresa
Exhibitions participation
Funding Round Completed
Smart Robots selected for the MISE 5G Experimental Project
Prototypes realization
Smart Robots Market Tests in production plants
2018 on market! TT award
JanMar
2017
MarJun
2017
Sept Dec
2017
May 2017
Sept 2017
www.smartrobots.it


Automation, Robotics and System Control lab
@ars_control
ARSControl
www.arscontrol.org
Collaborative Roboticsapplications and lessons learned
Cristian SecchiARSControl Lab, University of Modena and Reggio Emilia
Convegno Assemblaggio 4.0 e robotica collaborative18 Settembre 2018, Milano

ARSControl
☐ Active since 2001☐ ~30 people☐ 1 Startup company
“Apply smart science in real problems”

Active Industrial Partners

Human-Robot Cooperation
☐ React☐ SafetyStop
Share
Teach
Collaborate
☐ Aware, React☐ Space saving, efficiency
☐ Interact, Generalize☐ Expertise Transfer
☐ Understand, Coordinate☐ New Synergy
SAFE

PAN-ROBOTS☐ GOAL: A safe and efficient automatic
warehouse shared by AGVs, manual forklifts and people

☐ Stop when the laser scanners detect something☐ The other AGVs are not aware of what is going on☐ Inefficiency and possible traffic jams☐ Conservative black spot handling
☐ Advanced perception for advanced control and high performance
PAN-ROBOTS

☐ Sharing the space with humans does not necessarily mean reducing performances
☐ Advanced perception is necessary for creating awareness
☐ Awareness has to be properly integrated in the planning and control architecture for achieving efficient and safe human-robot co-existence
Lesson Learned

Lesson learned
☐ Force sensing allows to overcome positioning limitations
☐ Putting force in the control loop can make the robot human friendly
☐ Advanced perception allows to increase performance (again)
☐ If you treat a collaborative robot just like a robot that does not need fences, you are losing a big part of the story!

Lesson learned
☐ In order to capture ”pure expertise” the robot has to be hidden as much as possible
☐ Collaborative robotics allows to avoid intermediaries (e.g. programmers) for the (partial) automation of a task
☐ Generalizing in real cases is hard!

Collaboration

TIREBOT
278.8 Millions cars and trucks in EU
332.2 Millions tires need to be replaced
ONLY FOR COMPLYING WITH EU REGULATIONS!!!

One day in the tire workshop
12 – 80 kg

One day with TIREBOT
20
• TIREBOT for low level tasks!• Economic benefit
• Time/wheel decreased• Social benefit
• Human effort decreased

TIREBOT
TireWorkshop
LoadTransportation
TIREBOT is a personal forklift that takes care of lowlevel operations by cooperating with the human

TIREBOT☐ 60% perceived effort reduction☐ sufficient usability

TIREBOT – Follow up
https://youtu.be/t2A6eWdHBKY

Lesson Learned
☐ Humans and robots can work together, even in quite harsh environment
☐ Knowledge of the context, of the task and of the stage of execution is crucial for an effective collaboration☐ The robot should be able to infer it using data
☐ Implicit and explicit communication is of paramount importance!

☐ NEXT???

COMPLEMANTTaking into account humans’ feelings
☐ Estimate the stress/workload of the operator using wearable devices
☐ The robot adapts its collaborative behavior to the state of the user
☐ Expected to increase performance and to lead to better working condition
Starting on Oct. 1st, 2018

ROSSINIGoing big
☐ From safety centered to performance centered HRC
☐ Human-centeredarchitecture for industrial production environments
☐ New hardware and software solutions for low-and high- payload fixedand mobile HRC
☐ Next generation of HRC
1 ROSSINI Proposal Call FOF-02-2018
RObot enhanced SenSing, INtelligence and actuation to Improve productivity and job quality in manufacturing
List of participants
No * Participant organisation name Short Name Country 1 (Coord.) Datalogic S.R.L. DATALOGIC IT 2 Pilz GMBH & Co. KG PILZ DE 3 Università degli Studi di Modena e Reggio Emilia UNIMORE IT 4 Innovacio i Recerca Industrial i Sostenible SL IRIS ES 5 Scuola Universitaria Professionale della Svizzera Italiana SUPSI CH 6 Nederlandse Organisatie Voor Toegepast
Natuurwetenschappelijk Onderzoek TNO NL
7 Fraunhofer Gesellschaft Zur Foerderung Der Angewandten Forschung E.V.
FRAUNHOFER DE
8 Industriele Mechanisatie of Automatisatie NV MACHINEBOUW BE 9 Centro di Ricerca e Innovazione Tecnologica Srl CRIT IT 10 Core Innovation and Technology OE CORE EL 11 Whirlpool EMEA SPA WHIRLPOOL IT 12 Schindler Elettronica SA SCHINDLER CH 13 I.M.A. Industria Macchine Automatiche SPA IMA IT
Table of Contents 1. EXCELLENCE ......................................................................................................................................................... 2
1.1 OBJECTIVES ...................................................................................................................................................... 2 1.2 RELATION TO THE WORK PROGRAMME ............................................................................................................. 4 1.3 CONCEPT AND METHODOLOGY ........................................................................................................................ 6
1.3.1 Overall ROSSINI Concept .................................................................................................................... 6 1.3.2 Rossini Methodology ........................................................................................................................... 12
1.4 AMBITION ......................................................................................................................................................... 26 1.4.1 Progress beyond the state of the art ................................................................................................. 26 1.4.2 Innovation potential ............................................................................................................................. 30
2. IMPACT .................................................................................................................................................................. 32 2.1 EXPECTED IMPACTS ........................................................................................................................................ 32
2.1.1 Contribution to FOF-02-2018 Impacts .............................................................................................. 32 2.1.2 Other relevant impacts ........................................................................................................................ 37 2.1.3 Barriers & obstacles ............................................................................................................................ 40
2.2 MEASURES TO MAXIMISE IMPACT.................................................................................................................... 40 3. IMPLEMENTATION .............................................................................................................................................. 49
3.1 WORK PLAN — WORK PACKAGES, DELIVERABLES ........................................................................................ 49 3.2 MANAGEMENT STRUCTURE, MILESTONES AND PROCEDURES ....................................................................... 66 3.3 CONSORTIUM AS A WHOLE .............................................................................................................................. 69 3.4 RESOURCES TO BE COMMITTED ..................................................................................................................... 69
Starting on Oct. 1st, 2018

Conclusions
☐ Human Robot Collaboration is taking robotics to a new level
☐ We can transform shopfloor thanks to co-existence
☐ We can transform the production process thanks to collaboration
☐ .. And AI has just entered into the picture…

Automation, Robotics and System Control lab
@ars_control
ARSControl
www.arscontrol.org
Collaborative Roboticsapplications and lessons learned
Cristian SecchiARSControl Lab, University of Modena and Reggio Emilia
Convegno Assemblaggio 4.0 e robotica collaborative18 Settembre 2018, Milano

PROCESSI DI AUTOMAZIONE E IL FATTOREUMANO NELLA COOPERAZIONE UOMO-ROBOT
Fulvio Mastrogiovanni

CREDO CHE CIASCUNO ABBIA COSCIENZA DEL PREZZO PAGATODALL’UOMO AL PROGRESSO MECCANICO, GIACCHÉ È CHIARO CHE NONTANTO IL NUMERO DELLE ORE LAVORATIVE RENDE PENOSO IL LAVOROMANUALE QUANTO LA DISTRUZIONE – O ALMENO LA RIDUZIONE –MENTALE E MORALE DI CHI, PUR SENZA GRAVE SFORZO APPARENTE, ATTENDE A UNA «OPERAZIONE» D’OFFICINA DI UNA MONOTONIAESASPERANTE E PRIVA, PER CHI LA ESEGUE, DI UNA QUALSIASIGIUSTIFICAZIONE; E PRIVA ANCHE, PERCIÒ, DI UNA QUALSIASIRICHIESTA DI PARTECIPAZIONE.
LIBERO BIGIARETTI, 1960


I ROBOT COLLABORATIVI CHE LAVORANO FIANCO A FIANCO AGLIOPERATORI UMANI POSSONO ESSERE VISTI COME UN AIUTO AGLIOPERATORI STESSI, I QUALI POSSONO SUPERVISIONARE LE OPERAZIONISVOLTE DAI ROBOT E INTERVENIRE QUANDO NECESSARIO, MENTRE AIROBOT POSSONO ESSERE ASSEGNATI COMPITI DIFFICILI O STRESSANTI.

LA MASSIMIZZAZIONE DELLA SODDISFAZIONE DI UN OPERATOREUMANO DURANTE TASK COLLABORATIVI DIPENDE DA: 1) LAPOSSIBILITÀ DI SCEGLIERE IL PROPRIO TASK LIBERAMENTE; 2) IL FATTOCHE LA PERFORMANCE COMPLESSIVA DEL TEAM SIA MIGLIORE DELLASOMMA DELLE PERFORMANCE DEI SINGOLI MEMBRI DEL TEAM.
SE SI DOVESSE SCEGLIERE TRA 1) E 2), LA PERFORMANCECOMPLESSIVA HA PIÙ PRIORITÀ SULLA LIBERTÀ DI SCELTA DEI TASK.
GOMBOLAY ET AL 2013

GLI OPERATORI TENDONO A NON PREFERIRE IL CONTROLLO TOTALESUL PROCESSO COOPERATIVO, INVECE PREFERISCONO UN CONTROLLOPARZIALE.
QUESTO SEMBRA CONFERMATO DAL FATTO CHE LA PERFORMANCEDEL TEAM UOMO-ROBOT È MIGLIORE QUANDO IL ROBOT DECIDEQUALI AZIONI L’OPERATORE DEBBA SVOLGERE.
L’INTRODUZIONE DELLE PREFERENZE DI UN OPERATORE NEL PROCESSODI PIANIFICAZIONE DELLA COOPERAZIONE UOMO-ROBOT PORTA A: 1) UN DECREMENTO NELLE PERFORMANCE, 2) L’IDEA DA PARTEDELL’OPERATORE CHE IL ROBOT NON SI STIA COMPORTANDO SECONDOIL PIANO.
GOMBOLAY ET AL 2014, 2015

HUMAN-ROBOT INTERACTIONIS DIFFERENT FROM
HUMAN-ROBOT COOPERATION

1) LA COOPERAZIONE È RIFERITA AD UN OBIETTIVO SPECIFICO (ES., UN ASSEMBLAGGIO), ED È LIMITATA TEMPORALMENTE
2) GLI OPERATORI UMANI DEVONO SENTIRE DI AVERE (ALMENO INPARTE) IL CONTROLLO DELLA COOPERAZIONE, MENTRE IL LOROCOMPORTAMENTO POTREBBE NON ESSERE PREDICIBILE, NON SICURO, NON CONSISTENTE CON QUELLO DEL ROBOT.

1) SICUREZZA
2) CONTROLLO, O MODELLO DI COLLABORAZIONE UOMO-ROBOT
3) «EXPLAINABILITY» DELLE AZIONI DEL ROBOT

SICUREZZA

DENEI ET AL 2015; YOUSSEFI ET AL 2015A, 2015B
HTTPS://WWW.YOUTUBE.COM/WATCH?TIME_CONTINUE=1&V=SU1KRWCEGYI

MODELLO DI COLLABORAZIONE

ROBOTOPERATORE
FLEXHRCPLANHRCFLEXHRC+

FLEXHRC
UN OPERATORE NON DOVREBBE ESSERE FORZATO A SVOLGERE UNA SEQUENZA DI OPERAZIONIPREDEFINITA, DOVREBBE DECIDERE COSA FARE AL VOLO, AMMESSO CHE CIÒ NON SIAINCONSISTENTE CON GLI OBIETTIVI
UN ROBOT DOVREBBE MEDIARE TRA FORNIRE AD UN OPERATORE SUGGERIMENTI SU COSAESEGUIRE E REAGIRE IN MODO APPROPRIATO QUANDO L’OPERATORE NON SEGUE TALI ISTRUZIONI
UN ROBOT DOVREBBE DISACCOPPIARE LA PIANIFICAZIONE DI AZIONI E IL CONTROLLO, ANCHEQUANTO LO SPAZIO DI LAVORO È SOLO PARZIALMENTE NOTO
AD UN OPERATORE NON DOVREBBE ESSERE RICHIESTO DI LIMITARE IL PROPRIO MOVIMENTO, PERES., DOVER STARE DI FRONTE AL ROBOT COLLABORATIVO PER AVERE LE PROPRIE AZIONIMONITORATE.
UN OPERATORE DEVE POTER SCEGLIERE UN’AZIONE SENZA SEGUIRE IL SUGGERIMENTO DEL ROBOT, MENTRE IL ROBOT DEVE PIANIFICARE E REAGIRE DI CONSEGUENZA.
DARVISH ET AL 2018A, 2018B


ROBOTOPERATORE
FLEXHRCPLANHRCFLEXHRC+

FLEXHRC+UN OPERATORE NON DOVREBBE ESSERE FORZATO A SVOLGERE UNA SEQUENZA DI OPERAZIONI PREDEFINITA, DOVREBBE DECIDERE COSA FARE ALVOLO, AMMESSO CHE CIÒ NON SIA INCONSISTENTE CON GLI OBIETTIVI
UN ROBOT DOVREBBE MEDIARE TRA FORNIRE AD UN OPERATORE SUGGERIMENTI SU COSA ESEGUIRE E REAGIRE IN MODO APPROPRIATO QUANDOL’OPERATORE NON SEGUE TALI ISTRUZIONI
UN ROBOT DOVREBBE DISACCOPPIARE LA PIANIFICAZIONE DI AZIONI E IL CONTROLLO, ANCHE QUANTO LO SPAZIO DI LAVORO È SOLOPARZIALMENTE NOTO
AD UN OPERATORE NON DOVREBBE ESSERE RICHIESTO DI LIMITARE IL PROPRIO MOVIMENTO, PER ES., DOVER STARE DI FRONTE AL ROBOTCOLLABORATIVO PER AVERE LE PROPRIE AZIONI MONITORATE.
UN OPERATORE DEVE POTER SCEGLIERE UN’AZIONE SENZA SEGUIRE IL SUGGERIMENTO DEL ROBOT, MENTRE IL ROBOT DEVE PIANIFICARE EREAGIRE DI CONSEGUENZA.
IL MODELLO DI COOPERAZIONE È GERARCHICO
IL FUNZIONAMENTO DEL MODELLO DI COOPERAZIONE È INDIPENDENTE DAIMODULI PERCETTIVI DEL ROBOT
DARVISH ET AL 2019


DARVISH ET AL 2018
HTTPS://WWW.DROPBOX.COM/S/HF62QP2UGBSCQA0/FLEXHRC%2B.MP4?DL=0

«EXPLAINABILITY»

ROBOTOPERATORE
FLEXHRCPLANHRCFLEXHRC+

PLANHRC+UN OPERATORE NON DOVREBBE ESSERE FORZATO A SVOLGERE UNA SEQUENZA DI OPERAZIONI PREDEFINITA, DOVREBBE DECIDERE COSA FARE ALVOLO, AMMESSO CHE CIÒ NON SIA INCONSISTENTE CON GLI OBIETTIVI
UN ROBOT DOVREBBE MEDIARE TRA FORNIRE AD UN OPERATORE SUGGERIMENTI SU COSA ESEGUIRE E REAGIRE IN MODO APPROPRIATO QUANDOL’OPERATORE NON SEGUE TALI ISTRUZIONI
UN ROBOT DOVREBBE DISACCOPPIARE LA PIANIFICAZIONE DI AZIONI E IL CONTROLLO, ANCHE QUANTO LO SPAZIO DI LAVORO È SOLOPARZIALMENTE NOTO
AD UN OPERATORE NON DOVREBBE ESSERE RICHIESTO DI LIMITARE IL PROPRIO MOVIMENTO, PER ES., DOVER STARE DI FRONTE AL ROBOTCOLLABORATIVO PER AVERE LE PROPRIE AZIONI MONITORATE.
UN OPERATORE DEVE POTER SCEGLIERE UN’AZIONE SENZA SEGUIRE IL SUGGERIMENTO DEL ROBOT, MENTRE IL ROBOT DEVE PIANIFICARE EREAGIRE DI CONSEGUENZA.
IL MODELLO DI COOPERAZIONE È BASATO SU SISTEMI DI PIANIFICAZIONEGENERICI, QUINDI L’OPERATORE HA MAGGIORE LIBERTÀ
IL FUNZIONAMENTO DEL MODELLO DI COOPERAZIONE È INDIPENDENTE DALLAPERCEZIONE DELLE AZIONI DELL’OPERATORE
CAPITANELLI ET AL 2018



CAPITANELLI ET AL 2018
HTTPS://WWW.YOUTUBE.COM/WATCH?V=DMDZCB5FBMI&T=1S

www.hirorobotics.com

Screwing & Drilling
Assembling
Tracing
Tool Following
Pick & Place of Static and Moving Objects
Operator Assistance

HTTPS://WWW.YOUTUBE.COM/WATCH?V=6AX1GQEAP6U

STIMA ONLINE DELLAFATICA E DELLO STRESS DI
UN OPERATORE
FLEXHRC+/PLANHRC
XHRC
ADATTAMENTO ONLINEDEL COMPORTAMENTO
DEL ROBOTUSO DI SISTEMI
WEARABLE E DISPLAYSEE-THROUGH
USO DI SISTEMI DIPLANNING BASATI SULOGICHE POSSIBILISTE