Embed Size (px)
Citation preview

Ruchy ciała sztywnego i przekształcenia jednorodne
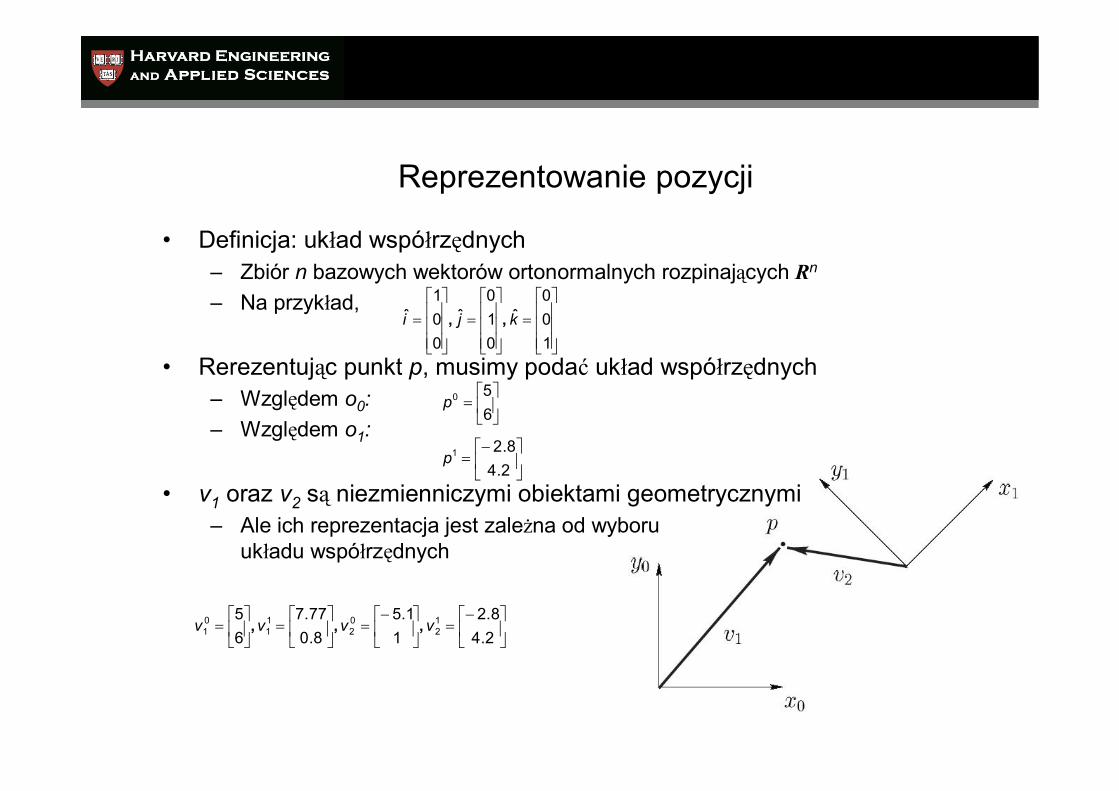
• Definicja: układ współrzędnych– Zbiór n bazowych wektorów ortonormalnych rozpinających Rn
– Na przykład,
• Rerezentując punkt p, musimy podać układ współrzędnych– Względem o0: – Względem o1:
• v1 oraz v2 są niezmienniczymi obiektami geometrycznymi– Ale ich reprezentacja jest zależna od wyboru
układu współrzędnych
Reprezentowanie pozycji
650p
2.48.21p
100
ˆ
010
ˆ
001
ˆ kji , ,
2.48.2
11.5
8.077.7
65 1
202
11
01 vvvv , , ,

• Obroty 2D – Reprezentowanie jednego układu współrzędnych w kategoriach innego
– gdzie wektory jednostkowe definiuje się następująco:
– Jest to macierz obrotu
Obroty
01
01
01 yxR
cossinˆ
sincosˆ 0
010
01 yyxx ,
cossinsincos0
1R
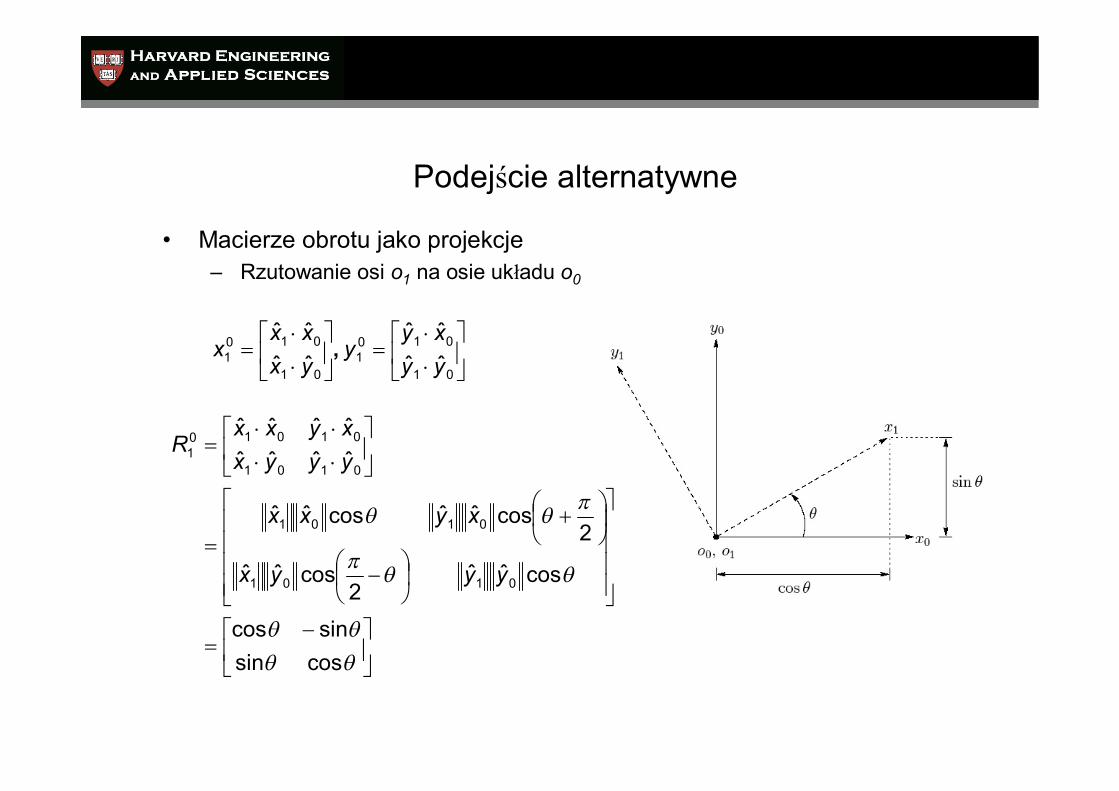
• Macierze obrotu jako projekcje– Rzutowanie osi o1 na osie układu o0
Podejście alternatywne
01
0101
01
0101 ˆˆ
ˆˆˆˆˆˆ
yyxy
yyxxx
x ,
cossinsincos
cosˆˆ2
cosˆˆ
2cosˆˆcosˆˆ
ˆˆˆˆˆˆˆˆ
0101
0101
0101
010101
yyyx
xyxx
yyyxxyxx
R

Własności macierzy obrotu
• Obroty odwrotne:
• Lub też, inna interpretacja używa relacji parzystości/nieparzystości:
TR
yyyx
xyxx
yyyxxyxx
R
01
1010
1010
1010
101010
cossinsincos
cosˆˆ2
cosˆˆ
2cosˆˆcosˆˆ
ˆˆˆˆˆˆˆˆ
TR
R
01
10
cossinsincos
cossinsincos
Własności macierzy obrotu
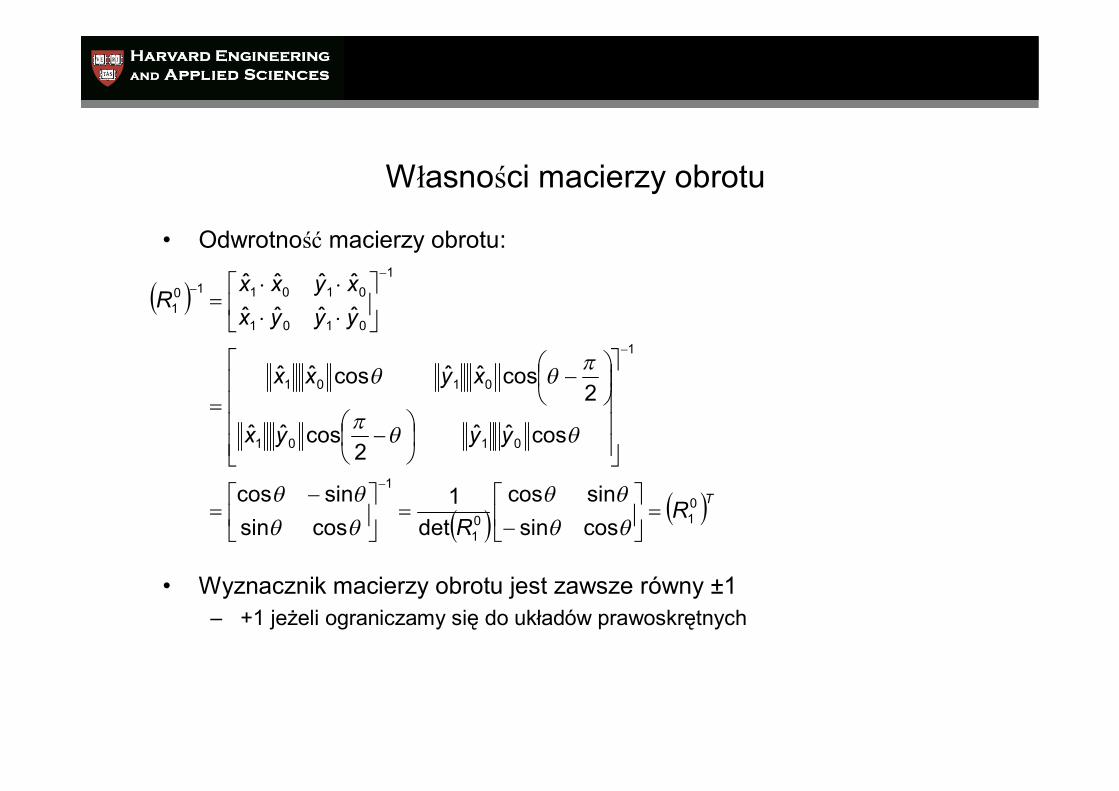
• Odwrotność macierzy obrotu:
• Wyznacznik macierzy obrotu jest zawsze równy ±1– +1 jeżeli ograniczamy się do układów prawoskrętnych
TRR
yyyx
xyxx
yyyxxyxx
R
010
1
1
1
0101
0101
1
0101
0101101
cossinsincos
det1
cossinsincos
cosˆˆ2
cosˆˆ
2cosˆˆcosˆˆ
ˆˆˆˆˆˆˆˆ

Własności macierzy obrotu
• Podsumowanie:– Kolumny (wiersze) R są wzajemnie ortogonalne– Każda kolumna (wiersz) R jest wektorem jednostkowym
• Zbiór wszystkich n x n macierzy mających te własności nazywa sięgrupą obrotów (ang. Special Orthogonal group) rzędu n
1det
1
RRRT
nSOR

Obroty trójwymiarowe
3ˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆ
010101
010101
01010101 SO
zzzzzxyxyyyxxzxyxx
R
• Ogólny obrót 3D:
• Przypadki szczególne– Podstawowe macierze obrotu
cos0sin010
sin0cos
cossin0sincos0001
,
,
y
x
R
R
1000cossin0sincos
,
zR
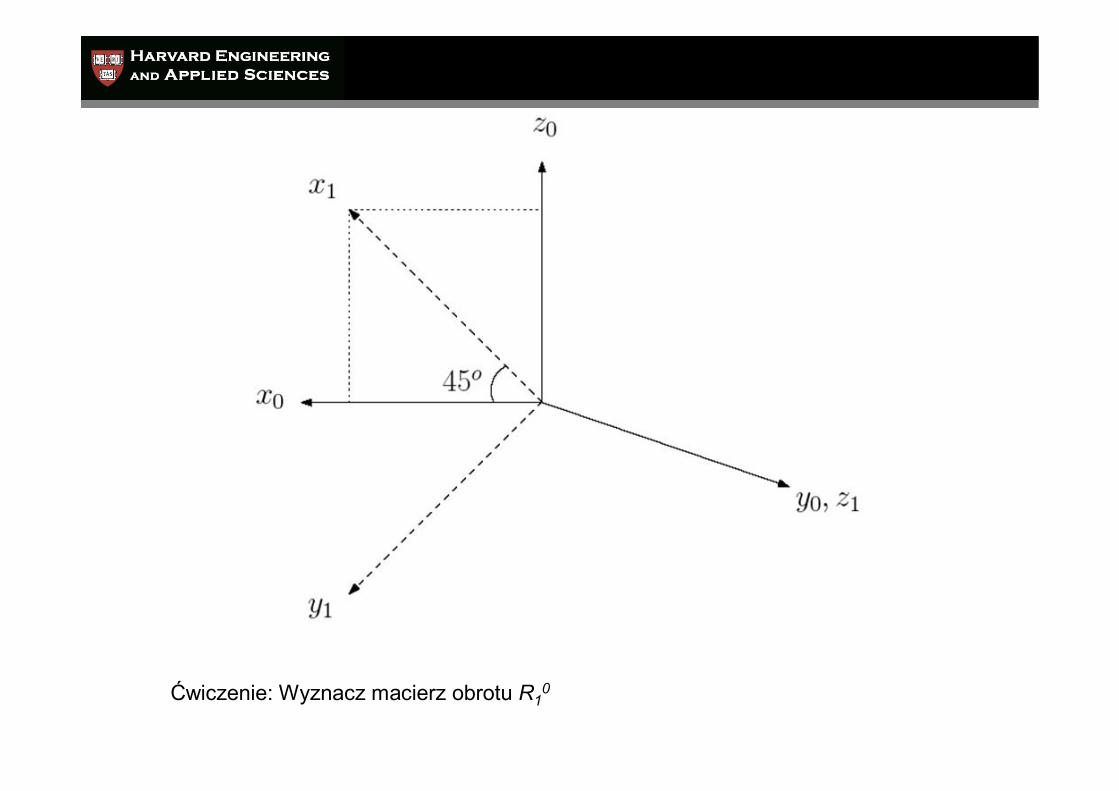
Ćwiczenie: Wyznacz macierz obrotu R10
Własności macierzy obrotu (c.d.)
• SO(3) jest grupą ze względu na mnożenie1. Zamkniętość: 2. Jedność:
3. Odwrotność:4. Łączność:
• W ogólności, elementy SO(3) nie są przemienne:
33 , 2121 SORRSORR
3100010001
SOI
1 RRT
321321 RRRRRR Pozwala składać obroty:bcabac RRR
1221 RRRR

Obroty względem zadanej osi
Blok na rys. (b) powstał przez obrót bloku z rys. (a) o kąt π względem osi z0.
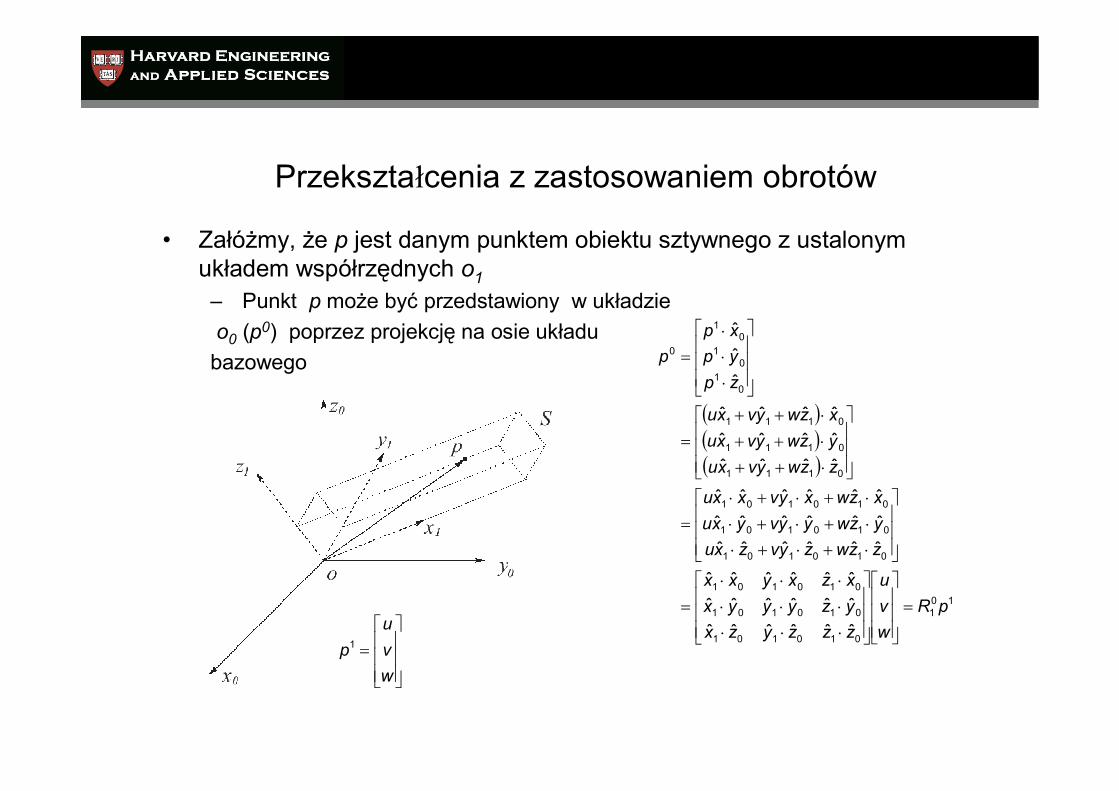
• Załóżmy, że p jest danym punktem obiektu sztywnego z ustalonym układem współrzędnych o1– Punkt p może być przedstawiony w układzieo0 (p0) poprzez projekcję na osie układu
bazowego
Przekształcenia z zastosowaniem obrotów
wvu
p1
101
010101
010101
010101
010101
010101
010101
0111
0111
0111
01
01
01
0
ˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆ
ˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆˆ
ˆˆˆˆˆˆˆˆˆˆˆˆ
ˆˆˆ
pRwvu
zzzyzxyzyyyxxzxyxx
zzwzyvzxuyzwyyvyxuxzwxyvxxu
zzwyvxuyzwyvxuxzwyvxu
zpypxp
p
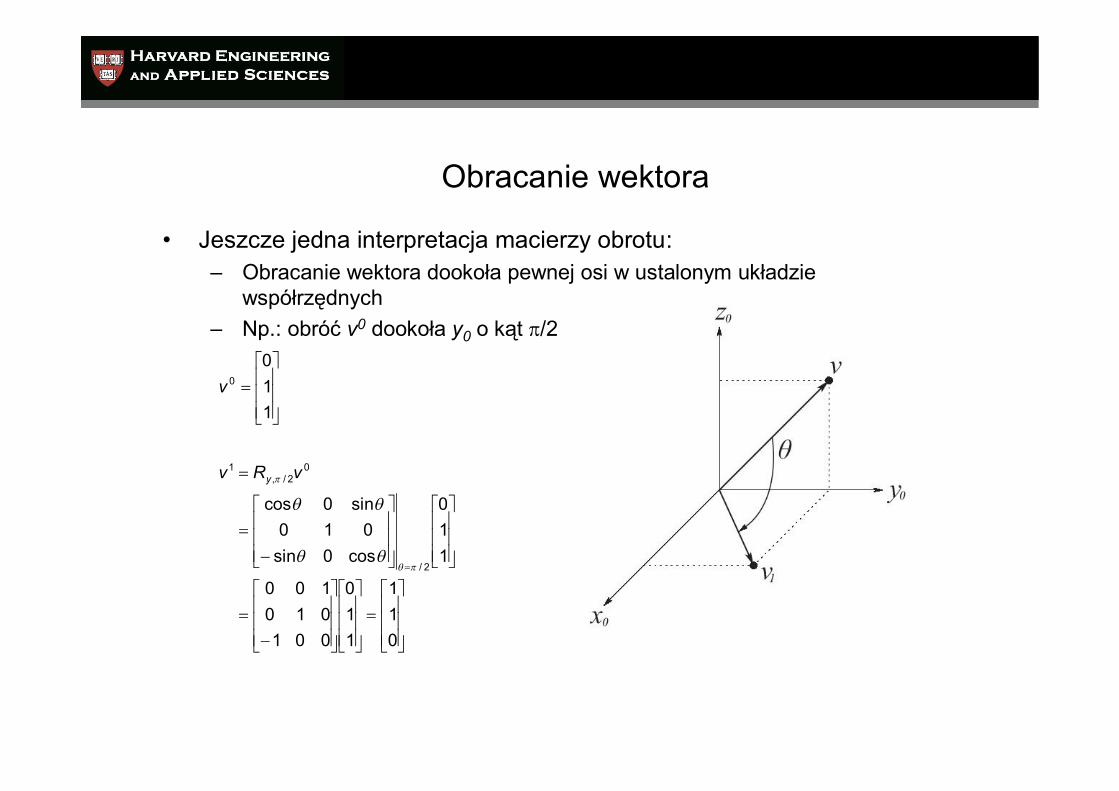
Obracanie wektora
• Jeszcze jedna interpretacja macierzy obrotu:– Obracanie wektora dookoła pewnej osi w ustalonym układzie
współrzędnych– Np.: obróć v0 dookoła y0 o kąt /2
110
0v
011
110
001010100
110
cos0sin010
sin0cos
2/
02/,
1
vRv y
Podsumowanie macierzy obrotu
• Trzy interpretacje roli macierzy obrotu:1. Reprezentuje przekształcenie współrzędnych punktu w dwóch różnych
układach odniesienia.2. Wyznacza orientację przekształconego układu współrzędnych w
odniesieniu do ustalonego układu współrzędnych.3. Jest operatorem przekształcającym wektor p przez obrót w nowy wektor Rp
w tym samym układzie współrzędnych.

Przekształcenia przez podobieństwo
• Wszystkie układy współrzędnych są zdefiniowane przez zbiór wektorów bazowych– Te rozpinają Rn
– Np. wektory jednostkowe i, j, k• W algebrze liniowej, n x n macierz A stanowi odwzorowanie z Rn do Rn
– y = Ax, gdzie: y – obraz x poprzez przekształcenie A.– Myśl o x jak o liniowej kombinacji wektorów jednostkowych (wektorów
bazwoych), np. wektorów jednostkowych
– Wtedy kolumny A są obrazami tych wektorów bazowych.– Jeśli chcemy reprezentować wektory względem innej bazy, np. f1, …, fn,
przekształcenie A można przedstawić w postaci
– przy czym kolumny T są wektorami f1, …, fn.
TnT ee 1...000...011 ..., ,
ATTA 1

Przekształcenia przez podobieństwo
• A’ oraz A mają identyczne wartości własne.• Wektor własny x macierzy A odpowiada wektorowi wł. T-1x macierzy A’.• Macierz obrotu stanowi również zmianę bazy
– Jeśli A jest przekształceniem liniowym w o0 oraz B jest przekształceniem liniowym w o1, wtedy są one związane relacją
• Np. układy o0 oraz o1 są związane macierzą obrotu
• Jeśli A jest też macierzą obrotu Rz, (względem o0), ten sam obrót wyrażony w o1 jest postaci
01
101 ARRB
001010100
01R
cossin0sincos0
001
001010100
1000cossin0sincos
001010100
01
101 ARRB

Składanie obrotów
• względem bieżącego układu współrzędnych– Np. rozważmy trzy układy współrzędnych o0, o1, o2
• To definiuje prawo składania dla kolejnych obrotów względem bieżącego układu współrzędnych: mnożenie prawostronne.
202
0
212
1
101
0
pRppRp
pRp
21
201
0 pRRp 12
01
02 RRR
Składanie obrotów
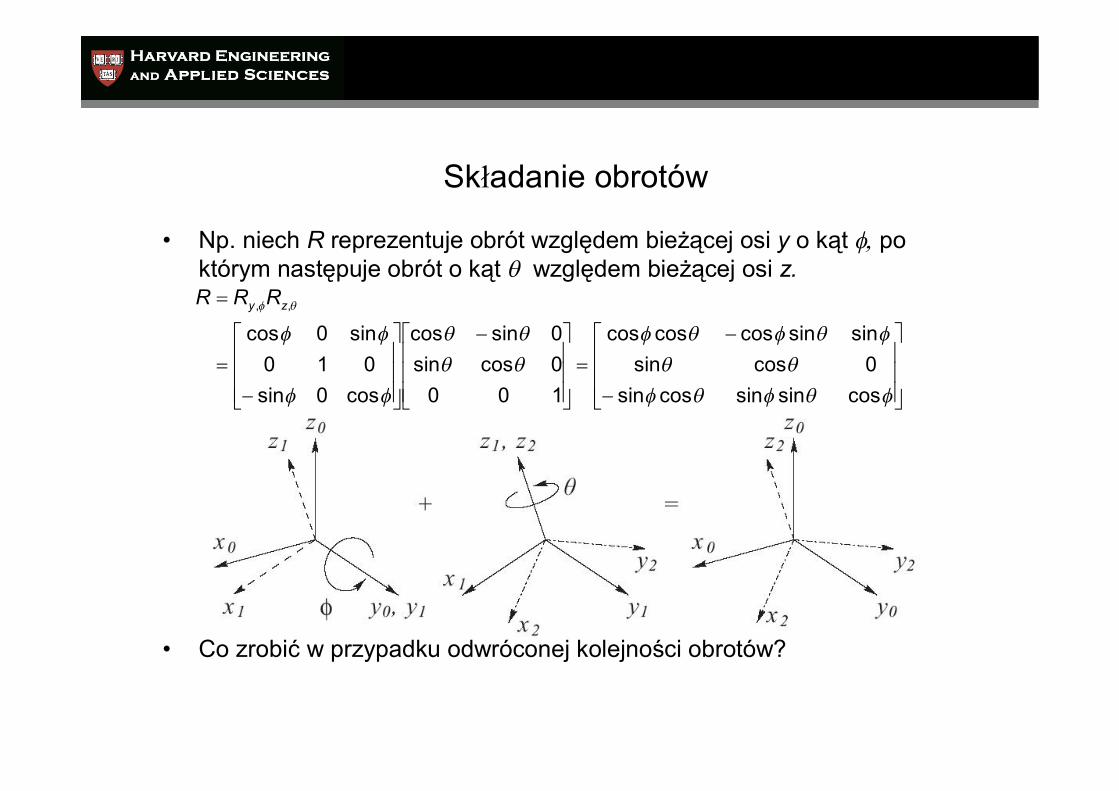
• Np. niech R reprezentuje obrót względem bieżącej osi y o kąt po którym następuje obrót o kąt względem bieżącej osi z.
• Co zrobić w przypadku odwróconej kolejności obrotów?
cossinsincossin0cossin
sinsincoscoscos
1000cossin0sincos
cos0sin010
sin0cos,, zy RRR
Składanie obrotów
• względem ustalonego układu współrzędnych (o0)– Niech obrót pomiędzy układami o0 oraz o1 będzie zdefiniowany przez R1
0
– Niech R będzie zadanym obrotem względem ustalonego układu współrzędnych o0.
– Stosując definicję przekształcenia przez podobieństwo, mamy:
• Definiuje to prawo składania dla obrotów względem ustalonego układu współrzędnych: mnożenie lewostronne.
01
01
101
01
02 RRRRRRR

Składanie obrotów
• Np. chcemy wyznaczyć macierz obrotu R, która jest złożeniem obrotu o kąt względem y0 (Ry,), a następnie o kąt względem x0 (Rx,).– Drugi obrót należy sprowadzić do bazowego układu współrzędnych
– Teraz kombinacją dwóch obrotów jest
,,,
,,1
,02
yzy
yzy
RRRRRRR
,,,,,, yzyzyy RRRRRRR
Składanie obrotów
• Podsumowanie:– Kolejne obroty względem bieżącego układu współrzędnych:
• Mnożenie prawostronne przez kolejne macierze obrotu– względem ustalonego układu współrzędnych (o0)
• Mnożenie lewostronne przez kolejne macierze obrotu– Możemy również mieć do czynienia z hybrydowym składaniem obrotów
względem bieżącego i ustalonego układu współrzędnych, stosując te same reguły.

Parametryzacja obrotów
• Aby zdefiniować dowolny obrót ciała sztywnego, wystarczy użyć trzech parametrów.– Opiszemy trzy takie parametryzacje:1. Kąty Euler2. Kąty obrotu, nachylenia i odchylenia3. Reprezentacja „oś–kąt”
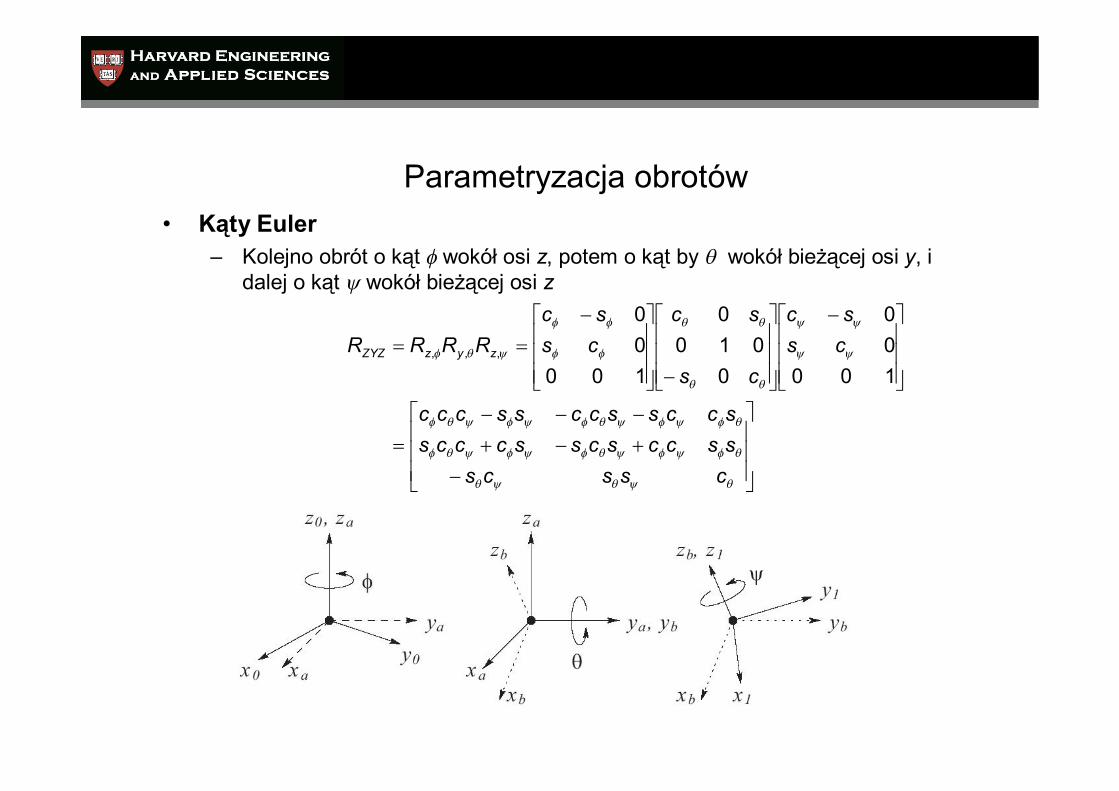
Parametryzacja obrotów• Kąty Euler
– Kolejno obrót o kąt wokół osi z, potem o kąt by wokół bieżącej osi y, i dalej o kąt wokół bieżącej osi z
csscsssccscsscccssccssccssccc
cssc
cs
sccssc
RRRR zyzZYZ
10000
0010
0
10000
,,,

Parametryzacja obrotów
• Kąty obrotu, nachylenia, odchylenia– Trzy kolejne obroty względem ustalonych osi głównych:
• Odchylenie – Yaw (x0) , nachylenie – pitch (y0) , obrót – roll (z0)
ccscscssscssscccs
cscssssccscc
cssc
cs
sccssc
RRRR xyzXYZ
00
001
0010
0
10000
,,,
Parametryzacja obrotów
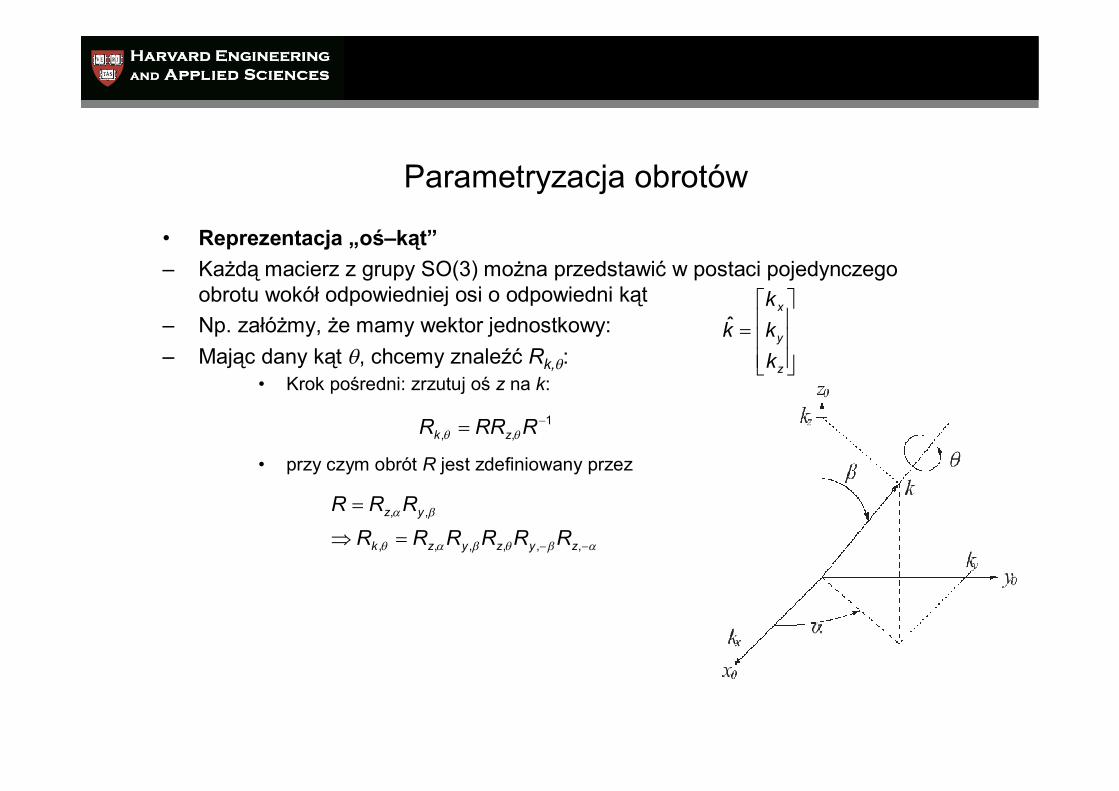
• Reprezentacja „oś–kąt”– Każdą macierz z grupy SO(3) można przedstawić w postaci pojedynczego
obrotu wokół odpowiedniej osi o odpowiedni kąt– Np. załóżmy, że mamy wektor jednostkowy: – Mając dany kąt , chcemy znaleźć Rk,:
• Krok pośredni: zrzutuj oś z na k:
• przy czym obrót R jest zdefiniowany przez
z
y
x
kkk
k̂
1,,
RRRR zk
,,,,,,
,,
zyzyzk
yz
RRRRRRRRR
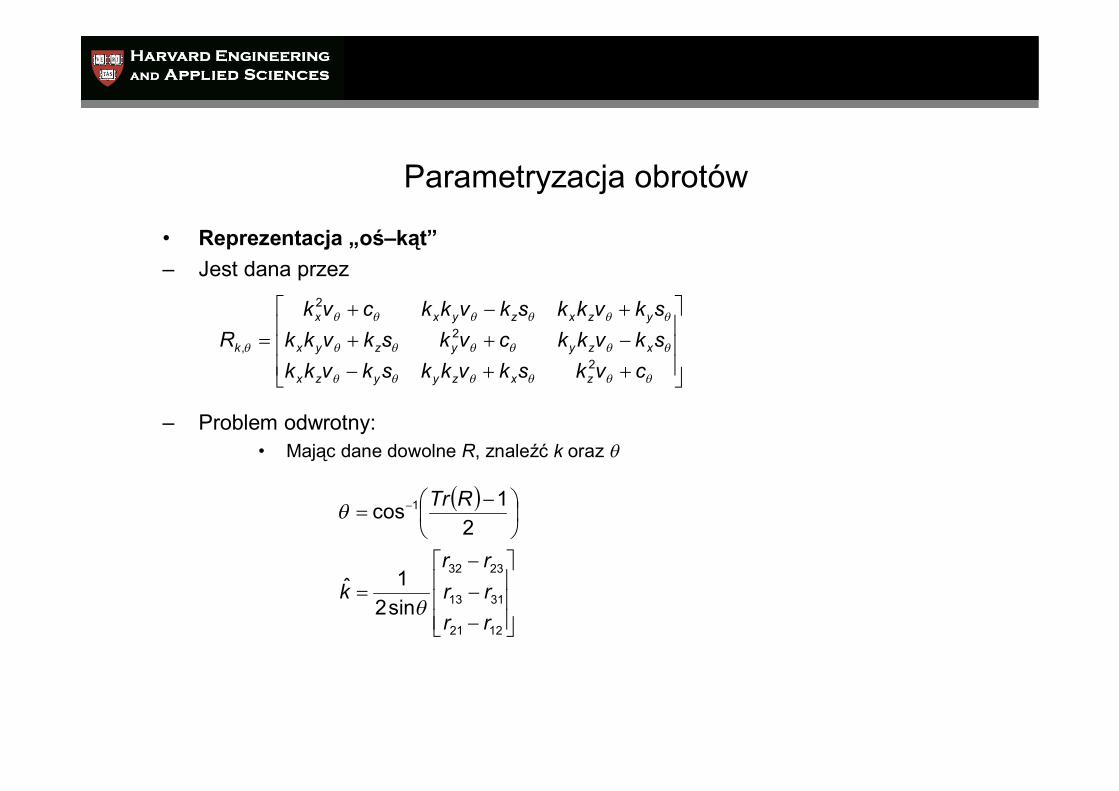
Parametryzacja obrotów
• Reprezentacja „oś–kąt”– Jest dana przez
– Problem odwrotny:• Mając dane dowolne R, znaleźć k oraz
cvkskvkkskvkkskvkkcvkskvkkskvkkskvkkcvk
R
zxzyyzx
xzyyzyx
yzxzyxx
k2
2
2
,
1221
3113
2332
1
sin21ˆ
21cos
rrrrrr
k
RTr

Ruchy sztywne
• Ruch sztywny jest kombinacją czystego obrotu i czystego przesunięcia– Zdefiniowany przez macierz obrotu (R) oraz wektor przesunięcia (d)
– Grupa wszystkich ruchów sztywnych (d,R) znana jest jako grupa euklidesowa (ang. Special Euclidean group), SE(3)
– Rozważmy trzy układy, o0, o1, oraz o2 razem z odpowiednimi macierzami obrotu R2
1 oraz R10
• Niech d21 będzie wektorem od początku o1 do o2, d1
0 od o0 do o1
• Dla punktu p2 związanego z o2, możemy przedstawić wektor położenia w układach o0 and o1:
3
3R
dSOR
33 SOSE n R
01
12
01
212
01
01
12
212
01
01
101
0
12
212
1
ddRpRR
ddpRRdpRp
dpRp

Przekształcenia jednorodne
• Ruchy sztywne (obroty i przesunięcia) można przedstawić za pomocąmnożenia macierzowego– Zdefiniujmy:
– Teraz punkt p2 można przedstawić w układzie o0:– gdzie P0 oraz P1 są postaci
10
1012
121
2
01
010
1
dRH
dRH
212
01
0 PHHP
11
11
00 pPpP ,

Przekształcenia jednorodne
• Mnożenie przez macierz H nazywa się przekształceniem jednorodnym i oznacza zapisem
• Przekształcenie owrotne:
3SEH
101 dRRH
TT

Przekształcenia jednorodne
• Podstawowe przekształcenia:– Trzy czyste przesunięcia, trzy czyste obroty
1000100
0010000110000100
0100001100001000010
001
,
,
,
c
b
a
cz
by
ax
Trans
Trans
Trans
100001000000100000001000100000000001
,
,
,
cssc
cs
sc
cssc
z
y
x
Rot
Rot
Rot











![PROGRAM NAUCZANIA TECHNIK ENERGETYK 311[54] · • Wyznaczanie reakcji wi ęzów. • Wyznaczanie metod ą wykre śln ą i analityczn ą warunków równowagi ciała sztywnego pod](https://img.dokumen.tips/doc/110x75/5c76b17009d3f2d3778bfe7c/program-nauczania-technik-energetyk-31154-wyznaczanie-reakcji-wi-ezow.jpg)

















