Embed Size (px)
Citation preview

Mathematical Biosciences 232 (2011) 116–134
Contents lists available at ScienceDirect
Mathematical Biosciences
journal homepage: www.elsevier .com/locate /mbs
Robust synchronization analysis in nonlinear stochastic cellular networkswith time-varying delays, intracellular perturbations and intercellular noise
Po-Wei Chen, Bor-Sen Chen ⇑Lab. of Control and Systems Biology, National Tsing-Hua University, 101 Section 2, Kuang Fu Rd., Hsin-chu 300, Taiwan
a r t i c l e i n f o
Article history:Received 14 July 2010Received in revised form 3 May 2011Accepted 7 May 2011Available online 23 May 2011
Keywords:Robust synchronizationCellular networkProcess delayIntercellular noiseEnvironmental disturbancesRobustness
0025-5564/$ - see front matter � 2011 Elsevier Inc. Adoi:10.1016/j.mbs.2011.05.002
⇑ Corresponding author. Tel.: +886 3 5731155; fax:E-mail address: [email protected] (B.-S. Che
a b s t r a c t
Naturally, a cellular network consisted of a large amount of interacting cells is complex. These cells haveto be synchronized in order to emerge their phenomena for some biological purposes. However, theinherently stochastic intra and intercellular interactions are noisy and delayed from biochemical pro-cesses. In this study, a robust synchronization scheme is proposed for a nonlinear stochastic time-delaycoupled cellular network (TdCCN) in spite of the time-varying process delay and intracellular parameterperturbations. Furthermore, a nonlinear stochastic noise filtering ability is also investigated for this syn-chronized TdCCN against stochastic intercellular and environmental disturbances. Since it is very difficultto solve a robust synchronization problem with the Hamilton–Jacobi inequality (HJI) matrix, a linearmatrix inequality (LMI) is employed to solve this problem via the help of a global linearization method.Through this robust synchronization analysis, we can gain a more systemic insight into not only therobust synchronizability but also the noise filtering ability of TdCCN under time-varying process delays,intracellular perturbations and intercellular disturbances. The measures of robustness and noise filteringability of a synchronized TdCCN have potential application to the designs of neuron transmitters, on-timemass production of biochemical molecules, and synthetic biology. Finally, a benchmark of robust syn-chronization design in Escherichia coli repressilators is given to confirm the effectiveness of the proposedmethods.
� 2011 Elsevier Inc. All rights reserved.
1. Introduction
Since the stochastic gene expressions in a cellular populationcontain a large copy number of molecules, their measurementsare difficult to observe exactly without synchronization amongcells. To collect these diverse phenomena, living organisms oftenproduce, secret, and detect the intercellular signal molecules,named auto-inducers (AIs), for intra-species communication [1,2].In recent decades, a new wave of research on cellular communica-tion and synchronization, known as ‘quorum sensing’, has beenstudied widely. Quorum sensing is a cell-to-cell community processthrough AIs, and it is believed to play a key role in such synchroni-zation characteristic as bio-luminescence, biofilm, sporulation, andthe suprachiasmatic nucleus (SCN) in the mammalian brain [3–5].Application of quorum sensing started on the bioluminescent bac-terium Vibrio fischeri [6]. Since revealing synchronization mecha-nism in a population of bacteria is naturally omnipresent, thesynchronization criteria of a coupled cellular network (CCN) needfurther investigation at both molecular and cellular levels, e.g. cir-cadian clocks and plant growth promoting microorganisms [7–9].
ll rights reserved.
+886 3 5715971.n).
Synchronization has been the highlight of CCN in various fieldsof systems biology and biochemical engineering. However, thecomplexity of these systems has obstructed a complete under-standing for the picture of a natural CCN. To comprehend this com-plexity, the topological structures within a regular CCN has beenstudied at first as the connection graph stability (GGS)-basedmethod [10]. This method makes sense and can be applied directly,although it cannot easily be extended generally. In recent years,more theoretical analyses of a stochastic CCN have been exploredand the topics of uncertainty, stability and controllability have alsobeen investigated broadly [8,11–16]. For instance, Lu et al. checkedthe second-maximal eigenvalue of the coupling function to con-firm the synchronization criteria [17]; Yu et al. introduced an effi-cient method via the linear hybrid constant-delayed couplednetwork [13]; Wang et al. studied the synchronization criteria fortime-delay system under Lipschitz continuous condition [18]; Liuet al. and Yu et al. investigated the analysis of unknown topologicalstructure network with Lipschitz continuous condition, too[19,20]; Li et al. and Qiu et al. studied the stochastic synchroniza-tion with the Lur’e system [7,9]. Additionally, Chen developed aM-synchronizable method with less conservative canonizationconditions for a complex coupled network [12]. Generally, theanalyses of a synchronized nonlinear time-varying-delay coupled

P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134 117
cellular network (TdCCN) are still limited for some special cases orby some heuristic methods via dense simulations.
Furthermore, a TdCCN in real world may suffer not only time-varying delays from the biochemical processes but also intracellu-lar perturbations and intercellular disturbances from natural uncer-tainties and environmental noise. Robustness is an essential andubiquitous property not only for a cellular function inside livingcells but also for synchronizability in a TdCCN [21–23]. For exam-ple, a population of V. fischeri need the robust synchronization forthe bioluminescence reaction [24]. For another example, the coralspawning must be robustly synchronized for the propagation pur-pose. The process delay, intracellular perturbation and intercellulardisturbance will influence the synchronization of a coupled cellularnetwork [9,15,19,25]. In this study, a robust synchronization prob-lem of a more general nonlinear stochastic TdCCN is consideredwith nonlinear couplings, time-varying delays, intrinsic randomparameter perturbations and stochastic environmental distur-bances. If the TdCCN does not have enough robustness and noise fil-tering ability for synchronization, then the synchronization willdecay or be destroyed [8]. Therefore, two important topics of cellu-lar network synchronization are to investigate the general robustsynchronizability and to estimate the noise filtering ability undertime-varying process delays, intracellular parameter perturbationsand intercellular and environmental noises. Although there are anumber of open issues to analyze this robust synchronization prob-lem, the impact of robust synchronization measurement is enor-mous and could be a bridge between the fundamental principlesof chaotic biochemical networks, medical practice, bioengineering,physics and chemistry [23].
In this study, a new global estimation method of robust syn-chronization and noise filtering ability is proposed for a TdCCN.After transferring the dynamic system model to a synchronizationtracking error dynamic system, we employ the robust tracking the-ory to efficiently estimate the robust synchronizability under time-varying process delays and intracellular perturbations. The robustfiltering theory is also employed to measure how much a synchro-nized TdCCN can attenuate the effect of intercellular disturbanceson the synchronization of TdCCN. To mimic a TdCCN, the intracel-lular perturbations (due to the intra-species biodiversity and natu-ral random fluctuations) and the intercellular disturbances (due toextracellular/ environmental noises) are both modeled into thenonlinear TdCCN with stochastic noises. Based on the synchroniza-tion error dynamic system, robust synchronization to tolerate thetime-varying process delay and intracellular perturbations is trans-formed to an equivalent robust stabilization problem and analyzedby the Lyapunov (energy-like) stability theory [26], while the noisefiltering ability to attenuate the effect of intercellular disturbanceson a synchronized TdCCN is examined by nonlinear robust filteringtheory. A general nonlinear time-varying-delay stochastic systemis discussed in this study. The techniques of nonlinear stabilization,nonlinear filtering and constrained optimization are employed toefficiently measure the robust synchronizability and the noise fil-tering ability of the nonlinear stochastic TdCCN.
In order to solve the robust synchronization problem efficiently,globally and generally, we need to solve a second order Hamilton–Jacobi inequality (HJI) to guarantee the robust synchronizationproblem of a nonlinear stochastic TdCCN. However, at present,there is no efficient method to solve the second order HJI analyti-cally and numerically. In this situation, the global linearization[27] technique has been employed to interpolate several linearizedstochastic systems at different operation points to approximate thenonlinear TdCCN via some smooth interpolation functions. Hence,the HJI for solving the robust synchronization problem could besimplified as a set of linear matrix inequality (LMI) problems,which is much easier to be solved via the help of LMI tool box inMATLAB. The proposed method has potential application to the
measures of robust synchronization and noise filtering ability ofa TdCCN as designs of neuron transmitters [28], on-time processesof cellular networks [29], and synthetic biology networks [7,30].
Finally, for convenience and easy illustration, a previous bench-mark example [21] is given to illustrate the measure procedure andto confirm the proposed criteria of robust synchronization andnoise filtering ability of a TdCCN under time-varying delays, intra-cellular random parameter perturbations and intercellular stochas-tic disturbances.
2. Robust synchronization for a nonlinear stochastictime-varying-delay coupled cellular network
In this section, we propose a new measure of robust synchroni-zation for a nonlinear stochastic TdCCN.
2.1. Stochastic system model of nonlinear coupled cellular networkwith time-varying delay
First, for convenience of study, let us consider a modified sto-chastic TdCCN for a synthetic Escherichia coli multi-cellular clockconsisted of N repressilators from [21] (see Fig. 1). The ith per-turbed repressilator can be represented with time-varying delays(t) and intracellular random perturbations due to the naturallynoisy transcription, translation, post-translation, signal transduc-tion or molecular diffusion as follows:
daiðtÞ ¼ �c0aiðtÞ þa0
1þ Cni ðt � sðtÞÞ
� �dt
þ Da0;1dws
1þ Cni ðt � sðtÞÞ
þ Dc0aiðtÞdw;
dbiðtÞ ¼ �c0biðtÞ þa0
1þ Ani ðt � sðtÞÞ
� �dt þ Da0;1dws
1þ Ani ðt � sðtÞÞ
;
ð1Þ
dciðtÞ ¼ �c0ciðtÞ þa0
1þ Bni ðt � sðtÞÞ
þ jSiðt � sðtÞÞ1þ Siðt � sðtÞÞ
� �dt
þ Da0;2dws
1þ Bni ðt � sðtÞÞ
þ DjSiðt � sðtÞÞdws
1þ Siðt � sðtÞÞ ;
dAiðtÞ ¼ b0 aiðt � sðtÞÞ � AiðtÞð Þdt þ Db0;1AiðtÞdwþ Db0;2aiðt � sðtÞÞdws;
dBiðtÞ ¼ b0 biðt � sðtÞÞ � BiðtÞð Þdt þ Db0;1BiðtÞdw;
dCiðtÞ ¼ b0 ciðt � sðtÞÞ � CiðtÞð Þdt þ Db0;1CiðtÞdw;
dSiðtÞ ¼ � ks0 þ ð1� Q 0Þg½ �SiðtÞ þ ks1Aiðt � sðtÞÞ þ gQ0
N
XN
j¼1
SjðtÞ � SiðtÞ� � !
dt
þ Dks1Aiðt � sðtÞÞdws þDgQ0
N
XN
j¼1
SjðtÞ � SiðtÞ� �
dw
for i = 1, . . . ,N where ai, bi, and ci are the mRNA concentrations oftetR, cI, and lacI, respectively, and their corresponding protein con-centrations are represented by Ai, Bi and Ci in the ith bacterium; Si isdenoted as the concentrations of AI inside and outside the ith bacte-rium, respectively. w(t) and ws(t) are standard Wiener processeswith dw(t) = n(t)dt and dws(t) = n(t � s(t))dt where n(t) andn(t � s(t)) are the Gaussian white noises due to thermal fluctuation,alternative splicing, DNA mutation, molecular diffusion, the biodi-versity, etc. [21,31,32]. In (1), the perturbed parameters, e.g. Dc0
and Dj, denote the deterministic parts of perturbations for corre-sponding processes, and n(t) and n(t � s(t)) absorb the related sto-chastic properties of intracellular perturbations, respectively. Boththe covariances of n(t) and n(t � s(t)) could be obtained as

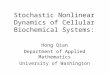
Fig. 1. The LuxR-AHL quorum sensing system in an ith E. coli repressilator. The AI (AHL) can diffuse freely across the cell membrane. When AI spreads into a cell, it will bindthe promoter of luxI to regenerate itself and to activate LuxR. Then the dimer of activated LuxR (the complex) will regulate the downstream gene lacI to function the cellularprocess of the repressilator. The repressilator module is located to the right of the dashed line, and the coupling module (quorum sensing) is at the left.
118 P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134
cov nðt1Þ;nðt2Þð Þ ¼ r2dt1 ;t2 where dt1 ;t2 denotes the delta function asdt1 ;t2 ¼ 0 for t1 – t2 or dt1 ;t2 ¼ 1 for t1 ¼ t2. We only assume someparameter perturbations in this benchmark (1). Of course, the moreinformation of intracellular perturbation we have, the more de-tailed noise terms we need to recruit in.
In order to generate an emergent behavior, a large amount syn-thetic cellular networks have to be synchronized together toemerge the molecular behavior of a simple synthetic network.However, the intrinsic parameter fluctuations and environmentaldisturbances will destroy the synchronization among the coupledsynthetic cellular networks. In this situation, we need to measurethe synchronizability of the TdCCN and their filtering ability toreject the effect of environmental disturbances on the synchroniza-tion. Further, the method of how to improve the synchronizabilityand filtering ability will be also discussed in the sequel.
For convenience, we simply note these molecular expressionlevels as follows
xi ¼ xi;1 � � � xi;M½ �T , aiðtÞ biðtÞ ciðtÞ AiðtÞ BiðtÞ CiðtÞ SiðtÞ½ �T ;
xTs;i ¼ xs;i;1 � � � xs;i;M½ �T , aiðt � sðtÞÞ � � � Siðt � sðtÞÞ½ �T :
The initial condition of this repressilator could be noted as xi(t) =xi(t0) "t0 2 [�s(t) 0]. The upper bound of the process delay and
Dfs;iðxs;iÞ ¼Da0;1
1þ Cni ðt � sðtÞÞ
Da0;1
1þ Ani ðt � sðtÞÞ
Da0;2
1þ Bni ðt � sðtÞÞ
þ DjSiðt � sðtÞÞ1þ Siðt � sðtÞÞ Db0;2aiðt � sðtÞÞ 0 0 Dks1Aiðt � sðtÞÞ
� ;
the gradient of process delay are a and b such that 0 < s(t) < a and_sðtÞ < b. The values and physical meanings of parameters in (1)can be seen in Table 1 and further details of this synthetic biochem-ical repressilator can be found in [21].
Generally, N nonlinear repressilators can be linked as the fol-lowing augmented system with simple notations X, Xs, xi and xs,i
for the states X(t) [33], X(t � s(t)), xi(t) and xi(t � s(t)), respectively
dX ¼ FðX;XsÞ þ GðX;XsÞð Þdt þ DFðXÞ þ DGðXÞð Þdw
þ DFsðXsÞ þ DGsðXsÞð Þdws , ðF þ GÞdt þ ðDF þ DGÞdw
þ ðDFs þ DGsÞdws; ð2Þ
where
X ¼ xT1 � � � xT
N
� �T; Xs ¼ xT
s;1 � � � xTs;N
� �T;
F ¼ f T1 ðx1; xs;1Þ � � � f T
N xN; xs;Nð Þ� �T
;
G ¼ gT1
x1; � � � ; xN;
xs;1; � � � ; xs;N
� �� � � gT
N
x1; � � � ; xN;
xs;1; � � � ; xs;N
� �� T
;
DF ¼ Df T1 ðx1Þ � � � Df T
N ðxNÞ� �T
;
DFs ¼ Df Ts;1ðxs;1Þ � � � Df T
s;Nðxs;NÞ� �T
;
DfiðxiÞ ¼ Dc0aTi ðtÞ 0 0 Db0;1AT
i ðtÞ Db0;1BTi ðtÞ Db0;1CT
i ðtÞ 0h iT
;
DG ¼ DgT1ðx1Þ � � � DgT
NðxNÞ� �T
; DGs ¼ DgTs;1ðxs;1Þ � � � DgT
s;Nðxs;NÞ� �T
;

Table 1Biochemical coefficients for a repressilator [21].
a0 Dimensionless transcription rate 216c0 The degradation rate of mRNA 1j Maximal contribution to lacI transcription in the presence of saturating amounts of AI 20n Hill coefficient 2.0ks0 the dimensionless decay rate of AI 1g The dimensionless diffusion rate of AI across the cell membrane 2.0ks1 The dimensionless binding affinity that LUXI combine lacI 0.01b0 The ration between the mRNA and protein lifetime 1s(t) The time-varying process delaya The maximum delay time of the time-varying genetic process 1b The maximum of the rate of the time-varying delay process 0.5Dc0 The deterministic part of intracellular perturbation for parameter c0 0.2Da0,1 The first kind of the deterministic part of intracellular perturbation for parameter a0 0.2Da0,2 The second kind of the deterministic part of intracellular perturbation for parameter a0 0.5Dj The deterministic part of intracellular perturbation for parameter j 0.3Db0,1 The first kind of the deterministic part of intracellular perturbation for parameter b0 0.5Db0,2 The second kind of the deterministic part of intracellular perturbation for parameter b0 0.3Dks1 The deterministic part of intracellular perturbation for parameter ks1 0.4Dg The deterministic part of intracellular perturbation for parameter g 0.5
P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134 119
DgiðxiÞ ¼ 0 0 0 0 0 0 DgQ0N
PNj¼1
SjðtÞ � SiðtÞ� �" #T
;
Dgs;iðxs;iÞ ¼ 0M�1
fiðxi; xs;iÞ ¼
�c0aiðtÞ þ a01þCn
i ðt�sðtÞÞ
�c0biðtÞ þ a01þAn
i ðt�sðtÞÞ
�c0ciðtÞ þ a01þBn
i ðt�sðtÞÞ þjSiðt�sðtÞÞ
1þSiðt�sðtÞÞ
b0 aiðt � sðtÞÞ � AiðtÞð Þb0 biðt � sðtÞÞ � BiðtÞð Þb0 ciðt � sðtÞÞ � CiðtÞð Þ
� ks0 þ ð1� Q 0Þg½ �SiðtÞ þ ks1Aiðt � sðtÞÞ
266666666666664
377777777777775;
gi
x1; . . . ; xN;
xs;1; . . . ; xs;N
� �¼
0
0
0
0
0
0gQ0
N
PNj¼1
SjðtÞ � SiðtÞ� �
266666666666664
377777777777775in which xi is the molecular expression of cell i; fi(xi,xs,i) is thenonlinear intracellular biochemical function and gi x1; . . . ; xN;ðxs;1; . . . ; xs;NÞ is the nonlinear coupling function which describesthe coupling strength and the coupling configuration between celli and other cells through the communication of AI. Dfi(xi), Dfs,i(xs,i),Dgi(xi) and Dgs,i(xs,i) are parameter fluctuations related to the corre-sponding real-time and delay-time function. Some properties of thenonlinear coupling function are discussed as follows:
Definition 1 [33]. The coupling function gi x1; . . . ; xN; xs;1; . . . ; xs;N� �
is separable with respect to x1, . . .,xN,xs,1, . . .,xs,N if the couplingfunction is differentiable and can be written as
gi x1; . . . ; xNxs;1; . . . ; xs;Nð Þ ¼ gi;1ðx1Þ þ � � � þ gi;NðxNÞ þ gi;s;1ðxs;1Þþ � � � þ gi;s;Nðxs;NÞ: ð3Þ
Definition 2 [33]. A coupling function g x1; . . . ; xN; xs;1; . . . ; xs;Nð Þbelongs to class S if g xc; . . . ; xcxs;c; . . . ; xs;cð Þ ¼ 0 for all xc and allxs,c where xc and xs,c are the synchronized real-time and delay-timesystem states (molecular expressions), respectively.
With above definitions, some properties could be described asfollows.
(i) Suppose the coupling functions of the TdCCN for this bench-mark are clearly separable by the additional form of intracel-lular AI in each cell. If the coupling functions are morecomplex, then it should be checked with the above defini-tion beforehand.
(ii) If the real-time cellular communication from cell j to cell iexists, then gi,j(xj) – 0; otherwise gi,j(xj) = 0. It is similar forthe delay-time communication function gi,s,j (xs,j).
(iii) If the coupling function in (2) is separable in the class S forall xi and xs,i, i = 1, . . . ,N, then when the coupled cells are syn-chronized i.e. x1 =� � �= xN, we have that
PNj¼1
@gi;jðxjÞ@xj¼ 0 andPN
i¼1@gi;s;jðxs;jÞ
@xs;j¼ 0; i.e. the coupling functions will not affect
the cells.(iv) Because of the random molecular diffusion and the quasi-
steady state assumption in [21], we can neglect the delay-time coupling function and say that the cellular communica-tion is fully coupling.
Remark 1. In conventional studies [12,13,34], the coupling func-tion is linear and could be described as G = C � D(t)X + Cs �D(t � s(t))Xs where the matrices C and Cs are defined byPN
j¼1Cij ¼ 0 andPN
j¼1j–i
Cs;ij ¼ 0 for i = 1, . . . ,N; ‘�’ is the Kronecker
product; the D(t) and D(t � s(t)) are respectively the inner-cou-pling matrices of the network at times t and t � s(t). The linear cou-pling is a special case in (2). In a nonlinear TdCCN, the separableproperties in Definition 1 and the class S in Definition 2 are neces-sary for the further study.
Before further analysis of robust synchronization and noise fil-tering ability, some definitions for ‘synchronization’ and ‘robustsynchronization’ should be given.
Definition 3. A coupled system (2) is called synchronization inprobability if for any e > 0 there exists d(e) > 0 such thatEkei(t0)k , Ekxi(t0) � xi+1(t0)k 6 d(e), then Ekei(t)k 6 e for all t P t0
and all i 2 {1, . . . ,N � 1}.
Definition 4. A coupled system is called robust synchronization ifthe coupled system still has synchronization in probability underintracellular stochastic parameter perturbations.
To analyze the robust synchronization easily and efficiently, weemploy the following error dynamic system,

120 P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134
de ¼ eF ðe; es;X;XsÞ þ eGðe; es;X;XsÞ �
dt
þ DeFðe;XÞ þ DeGðe;XÞ �dw
þ DeF sðes;XsÞ þ DeGsðes;XsÞ �
dws
, ðeF þ eGÞdt þ ðDeF þ DeGÞdwþ ðDeF s þ DeGsÞdws; ð4Þwhere
e , x1 � x2 � � � xk � xkþ1 � � � xN�1 � xN½ �T ¼ JX;
es , xs;1 � xs;2 � � � xs;k � xs;kþ1 � � � xs;N�1 � xs;N½ �T ¼ JXs
with J ¼
I �I 0 � � � 00 I �I � � � 0... . .
. . .. . .
. ...
0 � � � 0 I �I
26643775 2 RMðN�1Þ�MN; eF , JF represents
the synchronization error dynamic of intracellular function; and
so do DeF , JDF and DeF s , JDF (the errors of real-time and delay-
time intracellular perturbation), eG , JG (the error of coupling
function), and DeG , JDG and DeGs , JDG (the errors of real-timeand delay-time coupling perturbation). Then, the concept of robustsynchronization could be taken as a robust stability problem withrespect to the single equilibrium point e = 0 of synchronization er-ror dynamic system from system and signal processing viewpoints,i.e., e(t) ? 0 in probability for the synchronization error dynamicsystem in (4).
Remark 2. By the Mean-Value Theorem [35], we could connect thesynchronization error dynamic (4) with the augmented system (2)generally as the following difference equation
f ðx1Þ � f ðx2Þ ¼Z 1
0J x2 þ sðx1 � x2Þð Þðx1 � x2Þds
¼Z 1
0J x2 þ sðe1Þð Þe1ds ð5Þ
where; JðxÞ , @f ðxÞ@x is the Jacobian of the continuously differentiable
vector function f(x) for x 2 RN and s is an arbitrary weighting scalarfor 0 6 s 6 1.
2.2. Robust synchronization measurement
Based on Lyapunov stability theory [26], we could obtain thefollowing robust synchronization proposition for a nonlinear per-turbed TdCCN under time-varying process delays and intracellularparameter perturbations.
Proposition 1. For a nonlinear TdCCN with time-varying-delay andintracellular parametric uncertainty, if the following Hamilton–Jacobiinequality (HJI) holds for a Lyapunov function V(e) > 0,
@VðeÞ@e
� �T
ðeF þ eGÞ þ 12
DeF þ DeG �T @2VðeÞ@e2 DeF þ DeG �
þ 12
DeF s þ DeGs
�T @2VðeÞ@e2 DeF s þ DeGs
�6 0 ð6Þ
then the TdCCN in (2) has robust synchronization in probability in spiteof parameter fluctuations.
Proof. See Appendix A.1. h
If the TdCCN is free of parameter fluctuation DeF ; DeG; DeF s and
DeGs, then the synchronization condition in (6) becomes@VðeÞ@e
�TðeF þ eGÞ 6 0. If the coupling eG is negative, it is easy to syn-
chronize the TdCCN. If intrinsic parameter fluctuations
DeF ; DeG; DeF s and DeGs exist, in order to override the last two posi-tive terms in (6) due to parameter fluctuations, more negative
feedback coupling eG is necessary.In order to guarantee the synchronization character in (4), we
need to find a suitable Lyapunov function V(e) > 0 to satisfyinequality (6). In general, it is not easy to solve the HJI and at pres-ent there is no systematic method to find a Lyapunov function for anonlinear TdCCN, such that (6) holds to guarantee the robust syn-chronization. Many conventional studies have proposed relatedmethods on special systems such as the Lur’e system, Chua’s cir-cuits, linear hybrid systems and the Lipschitz continuous system[7,13,18]. To analyze robust synchronization and noise filteringability properties of nonlinear stochastic TdCCN more generallyand efficiently, the global linearization method [27,36] is employedfor the error dynamic system (4). Consider the following global lin-earization of nonlinear system (4), suppose
@@e F @
@esF
h i2 X for all e and es ð7Þ
where F ¼ eF T DeF T DeF TseGT DeGT DeGT
s
h iTand the polytope
X # R6MðN�1Þ�2MðN�1Þ.For example, if eF ¼ A0ðXÞeþ AsðXsÞes;
DeF ¼ DA0ðXÞe; DeF s ¼ DAsðXsÞes; eG ¼ B0ðXÞeþ BsðXsÞes; DeG ¼DB0ðXÞe; DeGs ¼ DBsðXsÞes, then
AT0ðXÞ DAT
0ðXÞ 0 BT0ðXÞ DBT
0ðXÞ 0AT
sðXsÞ 0 DATsðXsÞ BT
sðXsÞ 0 DBTsðXsÞ
" #T
2 X. Sup-
pose A0,k(X), As,k(Xs), DA0,k(X), DAs,k(Xs), B0,k(X), Bs,k(Xs),DB0,k(X),DBs,k(Xs) for k = 1, . . . ,K denote the vertices of the convexhull of X, i.e. [37],
X # Co
A0;1ðXÞ As;1ðXsÞ
DA0;1ðXÞ 0
0 DAs;1ðXsÞ
B0;1ðXÞ Bs;1ðXsÞ
DB0;1ðXÞ 0
0 DBs;1ðXsÞ
2666666666664
3777777777775; . . . ;
A0;kðXÞ As;kðXsÞ
DA0;kðXÞ 0
0 DAs;kðXsÞ
B0;kðXÞ Bs;kðXsÞ
DB0;kðXÞ 0
0 DBs;kðXsÞ
2666666666664
3777777777775; . . . ;
0BBBBBBBBBBB@A0;KðXÞ As;KðXsÞ
DA0;KðXÞ 0
0 DAs;KðXsÞ
B0;KðXÞ Bs;KðXsÞ
DB0;KðXÞ 0
0 DBs;KðXsÞ
2666666666664
3777777777775
1CCCCCCCCCCCAð8Þ
where (8) denotes a convex hull of X consisting of K vertices via thereal-time and the delay-time linearization matrices. Then thesynchronization property of the trajectory of the error dynamic(4) could be represented by the interpolation of the followinglinearized systems at vertices [37]
de ¼ A0;kðXÞ þ B0;kðXÞ� �
edt þ DA0;kðXÞ þ DB0;kðXÞ� �
edwþ As;kðXsÞ�
þ Bs;kðXsÞ�esdt þ DAs;kðXsÞ þ DBs;kðXsÞ
� �esdws
, ðA0;k þ B0;kÞedt þ DA0;k þ DB0;k� �
edwþ ðAs;k þ Bs;kÞesdt
þ DAs;k þ DBs;k� �
esdws ð9Þ
for k = 1, . . . ,K. The synchronization error dynamic of TdCCN in (4)can be interpolated by the linearized synchronization error dynam-ics of coupled systems at Kvertices in (9) as follows

P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134 121
de ¼XK
k¼1
Mk ðA0;k þ B0;kÞedt þ DA0;k þ DB0;k� �
edw�
þ ðAs;k þ Bs;kÞesdt þ DAs;k þ DBs;k� �
es dws�þ eeF þ eeG �
dt
þ eDeF þ e
DeG �dwþ e
DeF sþ e
DeGs
�dws ð10Þ
where Mk ¼ diagðlk;1ðe; es;X;XsÞ; . . . ;lk;N�1 ðe; es;X;XsÞÞT 2RMðN�1Þ�MðN�1Þ are some normalized interpolation functions withPK
k¼1lk;iðe; es;X;XsÞ ¼ I and 0 6 lk,i(e,es,X,Xs) 6 I [38]; the linearizedsystem matrices are shown as follows
A0;k ¼ diag A0;k;1ðXÞ; . . . ;A0;k;N�1ðXÞ� �
;
As;k ¼ diag As;k;1ðXsÞ; . . . ;As;k;N�1ðXsÞ� �
;
DA0;k ¼ diag DA0;k;1ðXÞ; . . . ;DA0;k;N�1ðXÞ� �
;
DAs;k ¼ diag DAs;k;1ðXsÞ; . . . ;DAs;k;N�1ðXsÞ� �
;
B0;k ¼ diag B0;k;1ðXÞ; . . . ;B0;k;N�1ðXÞ� �
;
Bs;k ¼ diag Bs;k;1ðXsÞ; . . . ;Bs;k;N�1ðXsÞ� �
;
DB0;k ¼ diag DB0;k;1ðXÞ; . . . ;DB0;k;N�1ðXÞ� �
;
DBs;k ¼ diag DBs;k;1ðXsÞ; . . . ;DBs;k;N�1ðXsÞ� �
:
The approximation errors of the global linearization in (10) withfinite vertices selection (for k = 1, . . . ,K) are denoted as follows
eeF , eF �XK
k¼1
MkðA0;keþ As;kesÞ; eeG , eG �XK
k¼1
MkðB0;keþ Bs;kesÞ;
eDeF , DeF �XK
k¼1
MkðDA0;keÞ; eDeF s, DeF s �
XK
k¼1
MkðDAs;kesÞ;
eDeG , DeG �XK
k¼1
MkðDB0;keÞ; eDeGs, DeGs �
XK
k¼1
MkðDBs;kesÞ
ð11Þ
If the approximation errors are bounded and small enough, then wecan represent the nonlinear TdCCN by the interpolated system in(10) via the global linearization method at K vertices. After findingthe system matrices via global linearization with suitable finite Kvertices, we could easily find the bounds on the approximationerrors for k = 1, . . . ,K as follows
keeFk22 6 e2
1kek22 þ e2
2kesk22; keeGk2
2 6 e23kek
22 þ e2
4kesk22;
keDeF k2
2 6 e25kek
22; ke
DeGk22 6 e2
6kek22;
keDeF sk2
2 6 e27kesk2
2; keDeGsk2 6 e2
8kesk2
ð12Þ
Then the robust synchronization and noise filtering ability mea-surement for a TdCCN could be discussed generally as the robuststability problem of interpolated error system in (10) through thehelp of a global linearization technique.
Choosing a general Lyapunov function V(e) > 0 for an interpo-lated TdCCN in (10) with positive definite matrices P; Ps; Q 2RM�M , and an irreducible symmetric semi-positive definite matrixU 2 RN�1�N�1 as the following quadratic function from the energypoint of view
VðeÞ , eTðU � PÞeþZ t
t�sðtÞeTðsÞðU � PsÞeðsÞds
þZ 0
�a
Z t
tþr_eTðsÞðU � QÞ _eðsÞds dr , eT Peþ
Z t
t�sðtÞeTðsÞPseðsÞds
þZ 0
�a
Z t
tþr_eTðsÞQ _eðsÞds dr ð13Þ
where U is a symmetric matrix defined as
U ,
N � 1 N � 2 N � 3 � � � 2 1
N � 2 2� ðN � 2Þ 2� ðN � 3Þ � � � 2� 2 2� 1
N � 3 2� ðN � 3Þ 3� ðN � 3Þ 3� 2 3� 1
..
. ... . .
. ... ..
.
� � � � � � ðN � 2Þ � 2 ðN � 2Þ � 1
1 � � � � � ðN � 2Þ � 1 ðN � 1Þ � 1
26666666666664
37777777777775:
For example,
U ¼
9 8 7 6 5 4 3 2 1
8 16 14 12 10 8 6 4 2
7 14 21 18 15 12 9 6 3
6 12 18 24 20 16 12 8 4
5 10 15 20 25 20 15 10 5
4 8 12 16 20 24 18 12 6
3 6 9 12 15 18 21 14 7
2 4 6 8 10 12 14 16 8
1 2 3 4 5 6 7 8 9
266666666666666666664
377777777777777777775
for N ¼ 10
via the global linearization method, we can get the followingproposition.
Proposition 2. For the nonlinear perturbative TdCCN, the robustsynchronization can be achieved if the following inequality holds withsymmetric positive definite solutions P ¼ PT > 0; Ps ¼ PT
s > 0;Q ¼ QT > 0, suitable matrices C1, C2, C3, C4, suitable positive scalarsc1, c2, c3, and P 6 c3I
Nð1Þ1;1 Nð1Þ1;2 Nð1Þ1;3 Nð1Þ1;4 Nð1Þ1;5 0
� Nð1Þ2;2 Nð1Þ2;3 0 0 Nð1Þ2;6
� � Nð1Þ3;3 Nð1Þ3;4 0 0
� � � � 1a Q 0 0
� � � � �c1I 0
� � � � � �c2I
26666666666664
377777777777756 0 ð14Þ
where
Nð1Þ1;1 ¼Ps þ CT
3 þ 2ðc1 þ c2Þðe21 þ e2
3ÞIþ4c3 e2
5 þ e26
� �I
ðAT0 � C1ÞT
AT0 � C1 2DAT
0PDA0 þ �1MðN�1ÞK�MðN�1ÞK � C3
264375;
Nð1Þ1;2 ¼ �C1 þ PT AT0 � C2
�T� T
;
Nð1Þ1;3 ¼�CT
3 þ C4 ATs � C1
�T
0MðN�1ÞK�MðN�1Þ 0MðN�1ÞK�MðN�1ÞK
24 35;
Nð1Þ1;4 ¼ C3 0MðN�1Þ�MðN�1ÞK� �T;
Nð1Þ1;5 ¼ C1 0MðN�1Þ�MðN�1ÞK� �T; Nð1Þ2;2 ¼ �C2 � CT
2 þ aQ ;
Nð1Þ2;3 ¼ 0MðN�1Þ�MðN�1ÞK ATs � C2
�T�
;
Nð1Þ2;6 ¼ CT2; Nð1Þ3;4 ¼ C4 0MðN�1Þ�MðN�1ÞK
h iT;

122 P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134
Nð1Þ3;3 ¼�CT
4 � ð1� bÞPs þ 2ðc1 þ c2Þ e22 þ e2
4
� �I
þ4c3 e27 þ e2
8
� �I
0MðN�1ÞK�MðN�1Þ
0MðN�1ÞK�MðN�1Þ 2DATsPDAs � �1MðN�1ÞK�MðN�1ÞK � C4
264375;
A0 ¼ A0;k þ B0;k� �
2 RMðN�1Þ�MðN�1ÞK ;
As ¼ As;k þ Bs;k� �
2 RMðN�1Þ�MðN�1ÞK ;
DA0 ¼ DA0;k þ DB0;k� �
2 RMðN�1Þ�MðN�1ÞK ;
DAs ¼ DAs;k þ DBs;k� �
2 RMðN�1Þ�MðN�1ÞK ;
�1
is a matrix with suitable rank in which all elements are 1
Proof. see Appendix A.2. h
The physical meaning of the results in (14) is that if the interpo-lated time-delay coupled system among the vertices of the globallylinearized synchronization error systems in (10) is asymptoticallystable in probability, then the nonlinear perturbative TdCCN (2)is globally robust synchronization. If more negative couplings B0,k
are given to overcome parameter fluctuations, a more robust syn-chronization of TdCCN will be achieved. In general, using the LMItoolbox in Matlab [39], it is easier to check the LMIs in (14) thanto solve the nonlinear HJI in (6) directly.
By solving the symmetric positive definite matrices P, Ps, Q, theconstraint on the LMI (14) is strict. With adequate choice of thesematrices C1, C2, C3, C4 and scalars c1,c2,c3, the conservative of therobust synchronization solution will be released, and the synchro-nization robustness could be enough to tolerate more intracellularperturbations such as DA0,k, DAs,k, DB0,k and DBs,k, together withtime-varying delays such as As,k and Bs,k. Then the robust synchro-nizability problem in (14) will be solved efficiently.
Remark 4
(i) U in (13) is an irreducible symmetric semi-positive definitematrix with special properties about the augmented cou-
pling function G. For example, if @G@X ¼
g11 � � � g1N
..
. . .. ..
.
gN1 � � � gNN
264375, then
usually [7]
U ¼
g12 þ � � � þ g1N g13 þ � � � þ g1N � � � g1N
� g13 þ � � � þ g1N þ g23 þ � � � þ g2N � � � g1N þ g2N
..
. . .. ..
.
� � � � � g1N þ � � � þ gN�1N
266664377775:
Choosing a suitable U in a Lyapunov function would simplifythe complicated solution of the LMI in (14).
(ii) Besides diffusing AI for communication, the other moleculeswork only inside individual bacteria. This implies that thesystem function eF is also separable with respect to e1, . . . ,eN�1,es,1, . . . ,es,N�1, and that the corresponding linearizedmatrices A0,k and As,k for k = 1, . . . ,K are diagonal indeed. Fur-ther, the linearized coupling matrices B0,k and Bs,k fork = 1, . . . ,K are also diagonal due to the fully coupling net-work. The matrices DA0,k, DAs,k, DB0,k, and DBs,k are alsodiagonal. If a cellular network is not fully coupling, e.g. therestricted molecular transport by specific ion channel [40],then our method still holds with only a simple modification.
(iii) In conventional studies, the synchronization analysis is lim-ited to some special cellular network, such as the linearhybrid constant delayed coupled networks [13], the Lips-chitz continuous conditional system [18–20], the Lur’e sys-tem [7,9], and the V-decreasing property system [12]. With
the help of global linearization method [27,36], we canextend the robust synchronization to a more general biolog-ical network through the quadratic robust tracking ability ofa set of globally linearized error dynamic systems. Therefore,the HJI in (6) of N-coupled nonlinear perturbed systems canbe replaced by an LMI in (14) at K vertices.
If the nonlinear TdCCN (2) is under different conditions, wecould have the following corollaries to simplify the global synchro-nization criterion in (14).
Corollary 1. If the nonlinear cellular network (2) is free of anyperturbations and process delays, then the global synchronizationcriterion in (14) can be easily reduced to the following inequality
2ðc1 þ c2Þðe21 þ e2
3ÞI þ ðP � CT1ÞðC2 þ CT
2Þ�1ðP � CT
1ÞT þ 2c�1
1 CT1C1
þ 2c�12 CT
2C2 6 � CT1
XK
k¼1
MkðA0;k þ B0;kÞ þXK
k¼1
ðA0;k þ B0;kÞT MTkC1
!
�XK
k¼1
ðA0;k þ B0;kÞT MTkC2
!ðC2 þ CT
2Þ�1
XK
k¼1
ðA0;k þ B0;kÞT MTkC2
!T
:
ð15Þ
Proof. see Appendix A.3. h
From (15), it can be seen that if the two terms in the right-hand-side of (15) are more negative, then more robust synchronizabilitywill be achieved and can tolerate larger perturbations. In general, ifthe couplings B0,k, k = 1, . . . ,K are more negative, then the synchro-nization of TdCCN will be achieved.
Since the robust synchronizations in (14) and (15) are only suf-ficient conditions, any measure of robust synchronization derivedfrom these conditions might underestimate robust synchronizabil-ity, i.e. a TdCCN that violates these conditions may be still robustlysynchronized.
Remark 5
(i) Synchronization of TdCCN is related to the characteristic ofsystem property F and coupling function G (or eF and eG). In(15), it is indicated that even if these cells are not identical,a TdCCN is still easily synchronized with sufficiently strongnegative coupling [9]. Although the cellular coupling couldenhance the synchronization behavior, it is not sufficientto achieve synchronization by a weak one within the cellularnetwork. Therefore, to synchronize a TdCCN, not only thecoupling strength with the suitable linkage but also someappropriate system characteristics are both needed. Withsuitable system characteristics and strong cellular commu-nications (i.e. the eigenvalues of A0,k + B0,k for k = 1, . . . ,Kare negative enough in the left-hand-side of the s-domain),the TdCCN will be synchronized more easily [12,21].
(ii) Delay processes could influence the synchronizationsignificantly. If the delay effects in an individual cell andbetween the cellular coupling are large, i.e. the eigenvaluesof delay-dependent matrices As,k and Bs,k are near the jw-axisor at the right-hand-side of the s-domain, then the systemtrajectory may diverge and destroy this synchronization [41].
(iii) According to the intra-species biodiversity and the noisy cellu-lar processes, we model stochastic parameter perturbations.When the influences of these perturbations are strong in(14), i.e. DF,DFs, DG and DGs are large, they will violate theLMIs such that the molecular trajectories in the TdCCN (e.g.the bioluminescence protein) may diverge from each other.

P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134 123
3. Noise filtering ability of a synchronized network under time-varying delays, intracellular perturbations and intercellulardisturbances
From the previous experimental implementations, although aTdCCN could meet the synchronization criterion under the processdelays and intracellular parameter perturbations, noticeable irreg-ularity in cellular behavior is still found in practical experiments.This is caused by the intercellular disturbances [42]. Consider aperturbative TdCCN suffering from intercellular disturbances asthe following general form
dX ¼ ðF þ Gþ HvÞdt þ ðDF þ DGÞdwþ ðDFs þ DGsÞdws; ð16Þ
where v ¼ vT1ðtÞ � � � vT
NðtÞ� �T and v i ¼ vT
i;1 � � � vTi;m
� �T 2 Rm�1
for i = 1, . . . ,N denote the intercellular disturbances on the ith cellfrom the m environmental and extracellular sources through thenonlinear weighting matrix H = H(X) , diag(h1(x1), . . . ,hN(xN)).Based on (4), we obtain the following equivalent error dynamicswith the intercellular disturbance
de ¼ eF þ eG þ eHev
�dt þ DeF þ DeG �
dwþ DeF s þ DeGs
�dws; ð17Þ
where ev , Jv denotes the intercellular disturbances on the error dy-
namic through the nonlinear weighting matrix eH, i.e.,eHev ¼ eHðe;XÞev , JHv . In the benchmark example of (16), we as-sume that there are three kinds of intercellular disturbances
(m = 3), and hi ¼1 1 1 0 0 0 00 0 0 1:5 1:5 1:5 00 0 0 0 0 0 0:5
24 35T
for i = 1, . . . ,N.
The intercellular disturbances include the environmental distur-bances and the extracellular disturbances, which consist of the dis-turbances from external input (e.g. externally additional AHL),plasmid copy-number variability, and other extra-cellular effects[18]. The day-night cycle is a well-known example of environmen-tal disturbance.
Before further study of the noise filtering ability of a synchro-nized network, let us denote a L2 measure of synchronization errore(t) as kekL2
, ðR1
0 eTðtÞeðtÞdtÞ1=2. We say that e 2 L2 if kekL2<1.
Then the effect of intercellular disturbances v on synchronizationerror kekL2
is said to be less than a positive value q if the followinginequality holds [43]
Ekek2L2
Ekvk2L2
6 q2 or Ekek2L26 q2Ekvk2
L2ð18Þ
for all v 2 L2, v – 0, and e(T) = 0 for T 6 0; i.e. the effect of intercellu-lar disturbances v on the synchronization does not exceed a pre-scribed attenuation value q or the disturbance attenuation isbelow q for the TdCCN. Then q in (18) can be considered as anupper-bound for the filtering ability of the synchronized network.
If e(T) – 0 for T 6 0, then inequality (18) should be modified as[43]
Ekek2L26 E Vðeð0ÞÞf g þ q2Ekvk2
L2ð19Þ
for some positive function V(e(0)) > 0. The filtering ability q0 is de-fined as the smallest q in (18) and is denoted as follows
q0 , min q ð20Þ
i.e. the effect of all possible intercellular disturbances on the syn-chronizability should be less than q0. In other words, q0 is the low-est upper bound of q. If q0 < 1, then the effect of disturbance v onthe synchronization is attenuated by the TdCCN; if q0 > 1, thenthe disturbance is amplified to influence the synchronization. A lar-gerq0 means that synchronization of the TdCCN is more sensitive tointercellular disturbances where the sensitivity is proportional to q0
and the noise filtering ability is inversely proportional to q0. Themeasure of filtering ability q0 on intercellular disturbances can pro-vide more insight into the effect of environmental and extracellularnoise on the synchronization behavior of a perturbed TdCCN. Themeasurement of noise filtering ability for the synchronized cellularnetwork has potential application to neuron transmitters, on-timeprocesses of cellular networks, and synthetic biology. For instance,before in vivo experiments, bacterial population control could beeasily designed through the following proposed noise filtering abil-ity measurement of a coupled network.
Based on the analysis above, the following propositions can beobtained to measure the noise filtering ability of a time-varying-delay coupled cellular network.
Proposition 3. Suppose the error dynamic of the TdCCN in (17)suffers from intracellular perturbations and intercellular disturbances.If the following HJI holds for a prescribed filtering value q
@VðeÞ@e
� �T
ðeF þ eGÞ þ 12
DeF þ DeG �T @2VðeÞ@e2 DeF þ DeG �
þ 12
DeF s þ DeGs
�T @2VðeÞ@e2 DeF s þ DeGs
�þ 1
4q2
@VðeÞ@e
� �T eHJJ� eHT @VðeÞ@e
� �þ eT e 6 0 ð21Þ
then the nonlinear TdCCN is robustly synchronized and the effect ofintercellular disturbances v on the synchronization error e is less thanq; i.e. the robust filtering with a desired attenuation value q in (18)or (19) is achieved.
Proof. see Appendix A.4. h
Remark 6
(i) Since the HJI in (21) implies the HJI in (6), the robust syn-chronization and the desired disturbance attenuation valueq are both achieved in Proposition 3. Furthermore, the HJIin (21) is more constrained than the HJI in (6) because ofthe needs of filtering intercellular disturbances under a pre-scribed value q.
(ii) In conventional studies, Gaussian white noises are favored toapproximate the intercellular disturbance [7]. However,there are different kinds of disturbances that should be con-sidered, e.g. jump or sinusoidal environmental noise. In ourstudy, all possible kinds of noise with finite energy couldbe included in our intercellular disturbance. If the intercellu-lar disturbances are deterministic, then the expectation of Ein (18) could be neglected.
(iii) According to the definition of filtering ability q0 in (20), ameasure of noise filtering ability of intercellular disturbanceon synchronization of a TdCCN in (16) can be obtained bysolving the following constrained optimization problem
q0 ¼min qsubject to q > 0; and ð21Þ
ð22Þ
However, it is not easy to solve the HJI in (21) for the robustsynchronization filtering problem. With a similar procedure, weemploy the global linearization method to simplify the measure-ment of noise filtering ability. For the synchronization error dynam-ics of a nonlinear TdCCN in (17), we can have the globallinearization method to be
@
@eF
@
@esF
@
@evF
� 2 X for all e; es;v with F ¼ FT eT
veHT
h iT

124 P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134
and denote the vertices of convex hull of X as
X # Co
A0;1 As;1 0DA0;1 0 0
0 DAs;1 0B0;1 Bs;1 0DB0;1 0 0
0 DBs;1 00 0 C0;1
2666666666664
3777777777775� � �
A0;k As;k 0DA0;k 0 0
0 DAs;k 0B0;k Bs;k 0DB0;k 0 0
0 DBs;k 00 0 C0;k
2666666666664
3777777777775� � �
A0;K As;K 0DA0;K 0 0
0 DAs;K 0B0;K Bs;K 0DB0;K 0 0
0 DBs;K 00 0 C0;K
2666666666664
3777777777775
0BBBBBBBBBBB@
1CCCCCCCCCCCAð23Þ
where C0;k ¼ C0;kðXÞ ¼ diag C0;k;1ðXÞ; � � � ;C0;k;N�1ðXÞ� �
and C0;k;iðXÞ 2RM�m for k = 1, . . . ,K
In this situation, the error dynamics in (17) can be interpolatedby the following linearized systems at Kvertices as (10) with theadditional approximation error eeHde ¼
XK
k¼1
Mk ðA0;k þ B0;kÞedt þ DA0;k þ DB0;k� �
edwþ ðAs;k þ Bs;kÞesdt�
þ DAs;k þ DBs;k� �
esdws þ C0;kevdt�þ eeF þ eeG þ eeH �
dt
þ eDeF þ e
DeG �dwþ e
DeF sþ e
DeGs
�dws; ð24Þ
where
eeH , eHev �XK
k¼1
MkC0;kdwsev and eeH��� ���2
26 e2
7kevk22: ð25Þ
Therefore, the following results can be obtained to measure thenoise filtering ability of a TdCCN
Proposition 4. Suppose the synchronized error dynamic in (24)suffers from intracellular parameter perturbations and intercellulardisturbances. If there exists symmetric positive definite solutions P, Ps,and Q; suitable matrices C1, C2, C3, and C4; suitable positive scalarsc1, c2, c3 and P 6 c3I, such that the following inequality holds for aprescribed filtering value q
;
Nð3Þ1;1 Nð3Þ1;2 Nð3Þ1;3 Nð3Þ1;4 Nð3Þ1;5 0 Nð3Þ1;7
� Nð3Þ2;2 Nð3Þ2;3 0 0 Nð3Þ2;6 Nð3Þ2;7
� � Nð3Þ3;3 Nð3Þ3;4 0 0 0
� � � � 1a Q 0 0 0
� � � � � c1 I2 0 0
� � � � � � c2 I2 0
� � � � � � Nð3Þ7;7
2666666666666664
37777777777777756 0; ð26Þ
where
Nð3Þ1;1 ¼ Nð1Þ1;1 þ I; Nð3Þ1;2 ¼ Nð1Þ1;2; Nð3Þ1;3 ¼ Nð1Þ1;3; Nð3Þ1;4 ¼ Nð1Þ1;4;
Nð3Þ1;5 ¼ Nð1Þ1;5; Nð3Þ2;2 ¼ Nð1Þ2;2;
Nð3Þ2;3 ¼ Nð1Þ2;3; Nð3Þ2;6 ¼ Nð1Þ2;6; Nð3Þ3;3 ¼ Nð1Þ3;3; Nð3Þ3;4 ¼ Nð1Þ3;4;
Nð3Þ1;7 ¼0 CT
0 � C1� �T
0MðN�1ÞK�mðN�1Þ 0MðN�1ÞK�mðN�1ÞK
" #; Nð3Þ2;7 ¼ 0 ðCT
0 � C2ÞTh i
Nð3Þ7;7 ¼ðc1 þ c2Þe2
9I � q2ðJþÞ�Jþ 0MðN�1Þ�mðN�1ÞK
0MðN�1ÞK�mðN�1Þ 0MðN�1ÞK�mðN�1ÞK
" #;
C0 ¼ ½C0;k� 2 RMðN�1Þ�MðN�1ÞK ;
then the robust synchronization to tolerate intracellular parameter per-turbations as well as the robust filtering with a prescribed attenuationvalue q are both achieved in (16).
Proof. See Appendix A.5. h
In Proposition 4, we need to solve an LMI in (26) instead of solv-ing the HJI in (21).
Remark 7.
(i) There are different communication strategies for synchroni-zation of TdCCN through low and high cell densities. Withhigh cell density, the TdCCN could be synchronized by its cou-pling communication (i.e. the characteristic of G or eG) but byits nominal interaction (the characteristic of F or eF ) at low celldensity [44]. In order to maintain the robust synchronizationand noise filtering ability in (26), high cell density is a com-mon strategy to achieve robust synchronization and noise fil-tering ability for a coupled cellular network [21,44].
(ii) Similar to solving the HJI-constrained optimization in (20),the filtering ability q0 in a nonlinear TdCCN could beobtained by minimizing q via the following constrainedoptimization problem
q0 ¼ minP;Ps ;Q ;C1 ;C2 ;C3 ;C4 ;c1 ;c2 ;c3
q
subject to P > 0; Ps > 0; Q > 0; c1 > 0;c2 > 0; c3 > 0; U � P 6 c3I and ð26Þ
ð27Þ
(iii) The constrained optimization in (27) can be easily solvedwith the LMI toolbox in MATLAB [45], SeDuMi in MATLAB[46], LMI-tool in SCILAB [47] through the Interior-pointMethods[48], or SDPA implemented in C++ [49] through theGeneralized Augmented Lagrangian Method [50]. Thesetwo methods can decrease q to q0 until no positive definiteP, Ps, and Q are solved in(26).
4. Numerical simulation example
In this section, we simulate a TdCCN consisting of a syntheticmulti-cellular clock as our example to verify the effectiveness ofthe proposed analysis methods.
Example. Consider a TdCCN consisting of a population of repress-ilators with ten individual cells (N = 10) under time-varying delay,s(t) = 0.5sin(pt/24 + 8) + 0.5, intracellular perturbations, andintercellular disturbances in (16), where the parameters are givenin Table 1 and the intercellular disturbances are assumed as follows
v iðtÞ ¼ 2e�0:005t sinð0:03ptÞ 5 sinð0:017ptÞ þ 5 3 cosðpt þ 5Þ þ 3� �T
for i ¼ 1; . . . ;10
ð28Þ
Since the protein expressions of a repressilator are almost phaselocked, for convenience, we can focus on CI protein expression byinserting a sequence of green fluorescent protein (gfp) in each cellto easily observe the molecular trajectory. The simulated stochasticgene expressions are given in Figs. 2–5 for different cell densities Q0
due to the different extracellular volumes in practice. In Fig. 2, it canbe seen that there are large intracellular perturbations and highlyrandom phase drifts between these individual oscillations due totime-varying process delays, intracellular molecular perturbations,and intercellular disturbances when the cellular network isuncoupled (Q0 = 0). As the coupling ability increases (due to the in-crease of Q0), Figs. 3 and 4 are given as Q0 = 0.63 and Q0 = 0.8,respectively.
To measure the robust synchronizability and the noise filteringability in this example, we take 81 vertices for the convex hull toderive to a compromise and to interpolate the nonlinear TdCCNthrough the following interpolation functions

0 100 200 300 400 500 600 700 800 900 10000
50
100
150
200
250
time (min)
prot
ein
leve
l (ar
b. u
nits
)The Time Response of Uncoupled cellular network
CI
1
CI2
CI3
CI4
CI5
CI6
CI7
CI8
CI9
CI10
0 100 200 300 400 500 600 700 800 900 1000−100
−80
−60
−40
−20
0
20
40
60
80
100The Error Dynamic of Uncoupled Cellular Network
time (min)
prot
ein
leve
l (ar
b. u
nits
)
e
1,5
e2,5
e3,5
a
b
Fig. 2. The time response in a multi-cellular clock consists of ten E. coli repressilators with Q0 = 0. (a) The dynamic response of protein CI: The subscript i denotes the ith cell.(b) The corresponding error dynamics: ei,5 for i = 1, 2, 3 denote the errors of CI1–CI2, CI2–CI3 and CI3–CI4, respectively. Here we show only parts of the error dynamics to clarify.Under this condition, the TdCCN cannot synchronize with the noise filtering ability q = 6.5017 due to the large influence of intra- and intercellular noises.
P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134 125
lk;iðX;XsÞ ¼1
ek;i � eiðtÞ�� ��2
2
,X81
k¼1
1
ek;i � eiðtÞ�� ��2
2
for k ¼ 1; . . . ;81 and i ¼ 1; . . . ;9; ð29Þ
where ek,i is the kth vertex for the ith error system. For Q0 = 0.63,after bringing all possible ek,i into (12), (25) and (29), the leastapproximation error bounds in (12) and (25) could be obtained asfollows

0 100 200 300 400 500 600 700 800 900 10000
50
100
150
200
250
time (min)
prot
ein
leve
l (ar
b. u
nits
)The Time Response of coupled cellular network with Q
0=0.63
CI
1
CI2
CI3
CI4
CI5
CI6
CI7
CI8
CI9
CI10
0 100 200 300 400 500 600 700 800 900 1000−100
−80
−60
−40
−20
0
20
40
60
80
100
time (min)
prot
ein
leve
l (ar
b. u
nnits
)
The Error Dynamic of Coupled Cellular Network with Q0=0.63
e
1,5
e2,5
e3,5
a
b
Fig. 3. The time response in a multi-cellular clock consists of 10 E. coli repressilators with Q0 = 0.63. (a) The dynamic response of protein CI. (b) Parts of corresponding errordynamics. Under this condition, the TdCCN could robustly synchronize with the noise filtering ability q = 0.5487, where the theoretical noise filtering ability q0 = 0.6085.
126 P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134
e1 ¼ 3� 10�15; e2 ¼ 3� 10�2; e3 ¼ 2� 10�17; e4 ¼ 0;
e5 ¼ 4� 10�12; e6 ¼ 2:8� 10�2; e7 ¼ 3:1� 10�2;
e8 ¼ 0; e9 ¼ 5� 10�15
ð30Þ
By solving (27) with suitable matrices C1, C2, C3, C4 and positivescales c1, c2, c3, we could get the noise filtering ability of the syn-chronized TdCCN as q0 = 0.6085 with
0 100 200 300 400 500 600 700 800 900 10000
50
100
150
200
250
time (min)
prot
ein
leve
l (ar
b. u
nits
)The Time Response of coupled cellular network with Q
0=0.8
CI
1
CI2
CI3
CI4
CI5
CI6
CI7
CI8
CI9
CI10
0 100 200 300 400 500 600 700 800 900 1000−100
−80
−60
−40
−20
0
20
40
60
80
100The Error Dynamic of Coupled Cellular Network with Q
0=0.8
time (min)
prot
ein
leve
l (ar
b. u
nits
)
e
1,5
e2,5
e3,5
a
b
Fig. 4. The time response in a multi-cellular clock consists of ten E. coli repressilators with Q0 = 0.8. (a) The dynamic response of protein CI. (b) Parts of corresponding errordynamics. Under this condition, the TdCCN could robustly synchronize with the noise filtering ability q = 0.2909, where the theoretical noise filtering ability q0 = 0.4162.
P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134 127

0 100 200 300 400 500 600 700 800 900 10000
50
100
150
200
250
time (min)
prot
ein
leve
l (ar
b. u
nits
)The Time Response of Couled Cellular Network with Q
0=1.0
CI
1
CI2
CI3
CI4
CI5
CI6
CI7
CI8
CI9
CI10
0 100 200 300 400 500 600 700 800 900 1000−100
−80
−60
−40
−20
0
20
40
60
80
100
time (min)
prot
ein
leve
l (ar
b. u
nits
)
The Error Dynamic of Coupled Cellular Network with Q0=1.0
e
1,5
e2,5
e3,5
a
b
Fig. 5. The time response in a multi-cellular clock consists of ten E. coli repressilators with Q0 = 1. (a) The dynamic response of protein CI. (b) Parts of corresponding errordynamics. As our proposed method has pointed out, sufficiently strong cell density would make the noise filtering ability worse, q = 0.4572, where the theoretical noisefiltering ability q0 = 0.5122.
128 P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134

P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134 129
P ¼
1:8211 �0:0483 �0:0477 0:0030 0:0005 0:0005 �0:0008� 2:3652 �0:0499 0:0005 0:0033 0:0003 �0:0013� � 2:5773 �0:0031 �0:0028 �0:0049 �0:0018� � � 12 �0:2598 �0:3035 �0:0003� � � � 12 �0:3140 �0:0003� � � � � 11 0:0107� � � � � � 17
2666666666664
3777777777775� 10�2;
Ps ¼
0:45 �0:0153 �0:0404 �0:0059 0:0023 0:0023 �0:0062� 0:48 �0:0094 0:0032 �0:0054 0:0003 �0:0037� � 0:51 �0:0042 �0:0051 �0:0201 �0:0054� � � 2:7 0:504 0:424 0:0001� � � � 2:7 0:2904 �0:0011� � � � � 2:7 �0:0645� � � � � � 2
2666666666664
3777777777775� 10�2;
Q ¼
0:0906 �0:0058 �0:0051 0:0000 0:0000 0:0000 �0:0012� 0:1165 �0:0049 0:0000 0:0000 0:0000 0:0000� � 0:1068 0:0000 0:0000 0:0001 0:0000� � � 0:1113 0:0348 0:0417 0:0000� � � � 0:1094 0:0425 0:0000� � � � � 0:1472 �0:0008� � � � � � 0:1373
2666666666664
3777777777775� 10�2:
One possible reason for the small matrices P, Ps, and Q is that theinequality (26) is semi-negative definite. With similar proceduresfor Q0 = 0 and Q0 = 0.8, the results confirm the intuitive expectationthat the perturbative coupled cellular network desynchronizeswhen Q0 = 0 (i.e., q0 could not be solved), but has better noise filter-ing ability when Q0 = 0.8 (q0 = 0.4162). The reason for this trendcould be the higher concentration of AI among the cells. Higher celldensity implies more generation and spread for AI, which could im-prove the cellular communication and synchronize the TdCCN [44].
However, the noise filtering ability is disrupted when the cellulardensity is strong enough ðq0;Q0¼1 ¼ 0:5122 > q0;Q 0¼0:8 ¼0:4162Þ. Thecomputational simulation result in Fig. 3 and Fig. 4 also show thisphenomenon ðqQ0¼1 ¼ 0:4572 > qQ0¼0:8 ¼ 0:2909Þ. This finding isconsistent with previous studies and one possible reason is thatthe increasing cell density will make the maximum catalytic fractionof AI decrease the period of oscillation, which may finally lead todesynchronizing the cellular oscillation [44]. Another possibleexplanation is that since there is broad biodiversity from cell to cell,sufficiently strong cell density implies very large intracellularperturbations that may desynchronize the TdCCN [51].
Through these computational simulations for different situa-tions, the noise filtering abilities of a robustly synchronized cellularnetwork are calculated as q � 0.5487 < q0 = 0.6085 (Q0 = 0.63),q � 0.2909 < q0 = 0.4162 (Q0 = 0.8), and q � 0.4572 < q0 = 0.5122(Q0 = 1), respectively. By comparison between the computed noisefiltering ability q, and the theoretical one q0, the conservative nat-ure of our proposed method is obvious, i.e., a noise filtering abilityless than 0.6085 cannot be solved (or guaranteed) theoretically byour method, but the noise filtering ability of 0.5487 can beachieved in practice when Q0 = 0.63. This is mainly due to the con-servative nature of the global linearization method, Lyapunov syn-chronizability and the solution of LMIs [27,36,52,53].
The benchmark in silico example of E. coli repressilators-TdCCNillustrates that although our proposed method is only a sufficientcondition, it is obvious that our method could not only providejudgment of the robust synchronizability for a stochastic nonlinearTdCCN under time-varying process delays and intracellular(parameter) perturbations but also efficiently estimate the noisefiltering ability under intercellular disturbances. A living organismmay contract a fatal illness without a collective metabolic rhythmfrom a genetic (intracellular) perturbation and/or pathological(intercellular) disturbance such as environmental changes, infec-tious agents or chemical carcinogens. Based on our proposed meth-
ods, the robust synchronizability and noise filtering ability of asynchronized TdCCN could be employed for a population synchro-nization analysis and for the prerequisite design of synthetic biol-ogy. Through our method, biologists could design a syntheticcoupled cellular network of E. coli population to simultaneouslygenerate the alcohol or other molecules robustly for the biomassenergy before in vivo experiments. If a population of coupled syn-thetic cellular networks could not synchronize robustly under thetime-varying process delay, intracellular perturbations and inter-cellular disturbances, biologists could improve their synchroniza-tion by increasing the cell density via the proposed method.Furthermore, if biologists want to synthesize a larger TdCCN thenthe analysis of noise filtering ability is contributive to multiplenetworks.
5. Discussion and conclusions
Synchronization is an important topic for understanding andpredicting collective cellular behavior. However, the innate time-varying delays from biochemical processes and natural stochasticnoises from intracellular perturbations and intercellular distur-bances will disrupt the united cellular phenomena. Robust syn-chronization is an essential property, which permits a populationof cells to function simultaneously and routinely under process de-lays as well as intracellular and intercellular disturbances. From asystematic point of view, maintaining robust synchronizability isnot only an individual level phenomenon but also a population-and system-level one. Therefore, to study the characteristic of ro-bust synchronization is a consideration of why and how a TdCCNcould be synchronized or not.
In this study, a newly global measurement of synchronizationfor general nonlinear stochastic coupled cellular network has beenproposed based on robust tracking theory and the systems biologyapproach. To efficiently estimate the robust synchronizability andnoise filtering ability without destroying the synchronization of ageneral nonlinear TdCCN, we employ the global linearizationmethod to avoid solving the HJI in (6) and (21) but to solve theLMI in (14) and (26). The robust synchronizability and noise filter-ing ability of a synchronized cellular network could provide moreinsight into the effects of time-varying process delays, intracellularparameter perturbations, and intercellular disturbances on thesynchronization of individual cells in the coupled cellular network.
Furthermore, our method could be applied to discuss other bio-logical synchronization phenomena. The robust synchronizabilityand noise filtering ability increase along with the cell density,but a sufficiently strong cell density will desynchronize the TdCCN.For the molecular basis of a quorum sensing system (in our bench-mark, this is a LuxR-AHL quorum sensing system), since AI usuallyhas a low concentration among the functional cells, the quorumsensing system is ultra sensitive to the variation of AI [5]. Thus,the increasing concentration of AI generated by each cell will im-prove the cellular communication due to the linear proportion be-tween Q0 and the cell number [21]. For example, in a micro-fluidicsystem, if the flow rate in a micro-trapping chamber has low veloc-ity, i.e. there is a high survival cell density through scrubbing, thenthe cells will be synchronized more easily and the bioluminescencewill re-burst faster [54]. For another example, without sufficient V.fischeri in the light organs of the symbiotic squid Euprymna sco-lopes, the V. fischeri will not have a robust bioluminescencereaction [24]. In vitro, the cell density can be modulated by control-ling the pH or temperature of the culture medium [55]. However,when the cell density is increased beyond a threshold value, the ro-bust synchronizability and noise filtering ability will decrease dueto the synthesizing fraction of AI and broad biodiversity [44].Clearly, we can observe the decreasing of noise filtering ability inour proposed method.

130 P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134
In its efforts to understand and develop artificial biological sys-tems, the synthetic biology has encountered numerous obstacles.The design of a ‘synthetic circuit’ involves creating new biochemi-cal parts, mass-producing these parts, fabricating these parts to bemodules, and applying these artificial modules [56]. The analysis ofa synthetic TdCCN subject to natively biochemical time-varyingprocess delays and the noisy intracellular and intercellular pro-cesses is an important step for constructing a population of syn-chronizable synthetic circuits to emerge a desired biologicalbehavior. Here, our main contribution is that our proposed methodcan efficiently find the corresponding robust synchronizability andnoise filtering ability for the most coupled cellular networksthrough solving the LMI in (14) and (26). For synthetic biology, itis important that under process delays, intracellular perturbationsand intercellular disturbances, the synchronization of a syntheticTdCCN may not occur or may be disrupted such that the couplednetworks could not function properly with suitable collective (oremergent) behavior. Clearly, our method gives a promise as a use-ful tool in a population of synthetic biological circuits beforein vivo experiments.
There is a trade-off between overcoming the effect of intracel-lular perturbations and attenuating the effect of intercellular dis-turbances in a TdCCN i.e. we cannot significantly overcome thesetwo effects simultaneously. When the individual cells are quitedifferent or the thermal fluctuations of molecules are violent(large intracellular perturbations), inequality (26) does not be eas-ily held under a small q0, and vice versa. Therefore, there areremarkable effects upon the robust synchronization by intracellu-lar perturbations. Further, through our proposed method, biolo-gists can analyze the cellular collective (or emergent) behaviorunder all possible intercellular disturbances with finite energy,i.e. not only Gaussian white noise or Brownian motion but alsojump motion, such as the heartbeats or impulse noise, could beconsidered.
However, the assumptions of quasi-steady state and free diffu-sion that we employed may not be always held for a TdCCN. Smal-ler AIs indeed diffuse freely across the bacterial cell membranesbut larger AIs as peptides appear to be actively transported bypumps [57,58]. From different strategies between active transportand passive diffusion, the biochemical function and the couplingfunction would be so distinct that our method should have a sim-ple modification. Furthermore, the conservative of global lineariza-tion method and LMI are also an inherent defect of our methods.
Although the mechanism of quorum sensing system has notpreviously been clear, cell-based studies have begun to revealsome common propositions. This study is not only applicable toestimating the synchronizability of stochastic biochemical systemsbut also useful in the future for designing a population of robustsynchronized synthetic cellular networks with prescribed function.In future research, we expect that this study could motivate theinvestigations in synthetic biology to coordinate complex groupbehaviors and analyze ‘multiple communicating populations’ (i.e.multi-quorum sensing systems) [59] to mimic more realistic biol-ogy strategies.
Acknowledgment
This work was supported by National Science Council, R.O.C,under Grant NSC 99-2745-E-007-001-ASP.
Appendix A
For simplifying the following notation, we represent X(t),X(t � s(t)), v(t), e(t), e(t � s(t)) and ev(t) as X, Xs, v, e, es, evrespectively.
A.1. Proof of Proposition 1
For the nonlinear error dynamic of a perturbative TdCCN (4), therobust stability theory based on Lyapunov function will be em-ployed to discuss its robust synchronization property. For Lyapu-nov function via chain rule and the Ito’s formula [60] for allnonzero e and es, the following equation will be held with the lasttwo additional diffusive terms.
Eð _VÞ ¼ E@VðeÞ@e
� �T eF þ eG þ DeF þ DeG � dwdtþ DeF s þ DeGs
� dws
dt
� �( )
þ 12
DeF þ DeG �T @2V@e2 DeF þ DeG �
þ 12
DeF s þ DeGs
�T @2V@e2 DeF s þ DeGs
�):
Therefore
Eð _VÞ ¼ E
@VðeÞ@e
�TðeF þ eGÞ þ 1
2 DeF þ DeG �T@2VðeÞ@e2 DeF þ DeG �
þ 12 DeF s þ DeGs
�T@2VðeÞ@e2 DeF s þ DeGs
�6 0
8><>:9>=>;:ðA:1Þ
Then the nonlinear perturbative TdCCN is robust synchronization inprobability, i.e. the time-varying process delays and intracellularparameter perturbations could be tolerated by the synchronizedcoupled cellular network if Eq. (6) holds.
A.2
Before the proof of Proposition 1, the following lemmas arenecessary.
Lemma 2. [27]:
aT bþ bT a 6 caTCaþ 1c
bTC�1b ðA:2Þ
for any vector or matrix a, b, scalar c > 0, and any C = CT > 0.
Lemma 3 [61]. Given the matrices N0, Mk, N1,k and N2,k,l with suit-able dimensions for k = 1, . . . ,K and l = 1, . . . ,K, we have the followinglemma
N0 þXK
k¼1
MkN1;k þXK
l¼1
NT1;lM
Tl þ
XK
k¼1
XK
l¼1
MkN2;k;lMTl
¼
I
M1
..
.
MK
266664377775
T N0 NT1;1 � � � NT
1;K
N1;1 N2;1;1 . . . N2;1;K
..
. ... . .
. ...
N1;K N2;K;1 � � � N2;K;K
2666664
3777775I
M1
..
.
MK
266664377775
ðA:3Þ
Proof of Proposition 2
Take the following Lyapunov quadratic function for a nonlinearcoupled cellular network (4) as (13)
VðeÞ ¼ eT PeþZ t
t�sðtÞeTðsÞPseðsÞdsþ
Z 0
�a
Z t
tþr_eTðsÞQ _eðsÞdsdr ðA:4Þ
with 0 < sðtÞ < a; _sðtÞ < b. Then we have
EdVðeÞ
dt
�¼ E eT P _eþ _eT Peþ eT Pse� ð1� _sÞeT
sPses þ a _eT Q _en�Z t
t�a_eTðsÞQ _eðsÞdsþ 1
2DeF þ DeG �T @2V
@e2 DeF þ DeG �þ 1
2DeF s þ DeGs
�T @2V@e2 DeF s þ DeGs
�)ðA:5Þ

;
:
P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134 131
Along the trajectory of (10) and Leibniz–Newton formula, we havethe following two equations
0 ¼ � _eþXK
k¼1
Mk A0;k þ DA0;kdw=dt þ B0;k þ DB0;kdw=dt� �
e�
þ As;k þ DAs;kdws=dt þ Bs;k þ DBs;kdws=dt� �
es þ eeFþ eeG þ e
DeF þ eDeG �
dw=dt þ eDeF sþ e
DeGs
�dws=dt ðA:6Þ
and
0 ¼ e� es �Z t
t�sðtÞ_eðsÞds ðA:7Þ
Substituting (A.6) and (A.7) into the derivative of (A.5) with suitablematrices C1, C2, C3, C4, and _s 6 b, we have
EdVðeÞ
dt
�6 E eT P _eþ _eT Peþ eT Pse� ð1� bÞeT
sPses þ a _eT Q _en�Z t
t�a_eT ðsÞQ _eðsÞdsþ DeF þ DeG �T
P DeF þ DeG �þ DeFs þ DeGs
�TP DeF s þ DeGs
�þ 2 eTCT
1 þ _eTCT2
�� � _eþ
XK
k¼1
Mk A0;k þ DA0;kdw=dt þ B0;k þ DB0;kdw=dt� �
e�"
þ As;k þ DAs;kdws=dt þ Bs;k þ DBs;kdws=dt� �
esþeeF þ eeGþ e
DeF þ eDeG �
dw=dt þ eDeF sþ e
DeGs
�dws=dt
iþ2 eTCT
3 þ eTsC
T4
�� e� es �
Z t
t�sðtÞ_eðsÞds
" #)
6 E
e
_e
es
26643775
T 2CT1A0ðMÞ þ Ps þ 2CT
3 �2CT1 þ P 2CT
1AsðMÞ � 2CT3
2CT2A0ðMÞ þ P �2CT
2 þ aQ 2CT2AsðMÞ
2CT4 0 �2CT
4 � ð1� bÞPs
26643775
8>><>>:�
e
_e
es
266437759>>=>>;þ E 2eTCT
1 eeF þ eeG �þ 2 _eCT
2 eeF þ eeG �n o
þ E DA0ðMÞeþ eDeF þ e
DeG �TP DA0ðMÞeþ e
DeF þ eDeG � �
þ E DAsðMÞes þ eDeF sþ e
DeGs
�TP DAsðMÞes þ e
DeF sþ e
DeGs
� �
þ E
ae
es
" #TCT
3
CT4
" #Q�1½C3 C4�
e
es
" #
�R t
t�sðtÞ
e
es
" #TCT
3
CT4
" #þ _eT ðsÞQ
24 35Q�1e
es
" #TCT
3
CT4
" #þ _eT ðsÞQ
24 35T
ds
8>>>>>>><>>>>>>>:
9>>>>>>>=>>>>>>>;ðA:8Þ
where
A0ðMÞ ¼XK
k¼1
MkðA0;k þ B0;kÞ ¼XK
k¼1
ðA0;k þ B0;kÞMk;
AsðMÞ ¼XK
k¼1
MkðAs;k þ Bs;kÞ ¼XK
k¼1
ðAs;k þ Bs;kÞMk;
DA0ðMÞ ¼XK
k¼1
Mk DA0;k þ DB0;k� �
¼XK
k¼1
DA0;k þ DB0;k� �
Mk;
DAsðMÞ ¼XK
k¼1
Mk DAs;k þ DBs;k� �
¼XK
k¼1
DAs;k þ DBs;k� �
Mk
by the diagonal matrices A0,k, B0,k, C0,k, DA0,k, DB0,k,As,k, DAs,k, andMk.
With the condition P 6 c3I, the bounded approximation errorsin (12) and Lemma 2, the effect of approximation error andstochastic perturbation in (A.8) could be simplified with c1, c2,c3 > 0 as follows
E 2eTCT1 eeF þ eeG �
þ 2 _eCT2 eeF þ eeG �n o
6 E eTc�11 CT
1C1eþ c1 eeF þ eeG �TeeF þ eeG �
þ _eTc�12 CT
2C2 _e
þ c2 eeF þ eeG �TeeF þ eeG ��
6 E eTc�11 CT
1C1eþ _eTc�12 CT
2C2 _eþ ðc1 þ c2ÞeTeF eeFnþ ðc1 þ c2ÞeTeGeeG þ ðc1 þ c2ÞeTeF eeG þ ðc1 þ c2ÞeTeGeeFo6 E eTc�1
1 CT1C1eþ _eTc�1
2 CT2C2 _eþ 2ðc1 þ c2ÞeTeF eeF þ 2ðc1 þ c2ÞeTeGeeGn o
6 E eTc�11 CT
1C1eþ _eTc�12 CT
2C2 _eþ eT 2ðc1 þ c2Þðe21 þ e2
3Þenþ eT
s2ðc1 þ c2Þ e22 þ e2
4
� �es�; ðA:9Þ
E DA0ðMÞeþ eDeF þ e
DeG �TP DA0ðMÞeþ e
DeF þ eDeG � �
6 E DA0ðMÞe �T
P DA0ðMÞe �
þ eDeF þ e
DeG �TP e
DeF þ eDeG �
þ DA0ðMÞe �T
P eDeF þ e
DeG �þ e
DeF þ eDeG �T
P DA0ðMÞe ��
6 2eTDAT0ðMÞPDA0ðMÞeþ 2 e
DeF þ eDeG �T
P eDeF þ e
DeG �6 2eTDAT
0ðMÞPDA0ðMÞeþ 4eT
DeF PeDeF þ 4eT
DeG PeDeG
6 2eTDAT0ðMÞPDAð0MÞeþ eT 4c3 e2
5 þ e26
� �e ðA:10Þ
and
E DAsðMÞes þ eDeF sþ e
DeGs
�TP DAsðMÞes þ e
DeF sþ e
DeGs
� �6 2eT
sDATsðMÞesPDAsðMÞes þ eT
s4c3 e27 þ e2
8
� �es: ðA:11Þ
Since Q > 0 i.e. Q�1 is also positive, the last term in (A.8) can be ne-glected by the following fact
�Z t
t�sðtÞ
e
es
" #T CT3
CT4
" #þ _eTðsÞQ
24 35Q�1e
es
" #T CT3
CT4
" #þ _eTðsÞQ
24 35T
ds 6 0
ðA:12Þ
Then
EdVðeÞ
dt
�6 E
e
_e
es
26643775
T N01;1 N0
1;2 N01;3
� N02;2 N0
2;3
� � N03;3
2666437775
e
_e
es
26643775
8>>><>>>:9>>>=>>>;; ðA:13Þ
where
N01;1 ¼ CT
1A0ðMÞ þ AT0ðMÞC1 þ Ps þ C3 þ CT
3 þ 2DAT0ðMÞPDA0ðMÞ
þ c�11 CT
1C1 þ 2ðc1 þ c2Þðe21 þ e2
3ÞI þ 4c3ðe25 þ e2
6ÞI
þ aCT3Q�1C3;

132 P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134
N01;2 ¼ AT
0ðMÞC2 � CT1 þ P; N0
1;3
¼ CT1AsðMÞ � CT
3 þ C4 þ aCT3Q�1C4; N0
2;2
¼ �C2 � CT2 þ aQ þ c�1
2 CT2C2; N0
2;3 ¼ CT2AsðMÞ;
N03;3 ¼ �C4 � CT
4 � ð1� bÞPs þ 2DATsðMÞPDAsðMÞ þ 2ðc1 þ c2Þðe2
2
þ e24ÞI þ 4c3ðe2
7 þ e28Þ þ aCT
4Q�1C4:
By Lemma 3 and the Schur Complement [27], (A.13) could bedescribed as follows
N01;1 N0
1;2 N01;3
� N02;2 N0
2;3
� � N03;3
266664377775 ¼MT
Nð1Þ1;1 Nð1Þ1;2 Nð1Þ1;3 Nð1Þ1;4 Nð1Þ1;5 0
� Nð1Þ2;2 Nð1Þ2;3 0 0 Nð1Þ2;6
� � Nð1Þ3;3 Nð1Þ3;4 0 0
� � � � 1a Q 0 0
� � � � �c1I 0
� � � � � �c2I
26666666666666664
37777777777777775M:
ðA:14Þ
where Nð1Þi;j are defined in (14); M ¼ diag M; I;M; I; I; I� �
and M ¼I M1 � � � Mk � � � MK½ �, i.e., if the inequality (14) holds, then
the nonlinear coupled system will be robustly synchronized.
A.3. Proof of Corollary 1
By the similar proof procedure as Proposition 2, it is easyto prove that we have the following inequality of derivativeof V(e)
EdVðeÞ
dt
�¼ E eT P _eþ _eT Peþ 2 eTCT
1 þ _eT CT2
�� _eþ A0ðMÞ þ eeF þ eeG �n o
¼ Ee
_e
24 35T CT1A0ðMÞ þ AT
0ðMÞC1 þ 2c�11 CT
1C1 P�CT1 þ AT
0ðMÞC2
� �C2 �CT2 þ 2c�1
2 CT2C2
24 358<:�
e
_e
24 35þ 2ðc1 þ c2Þ eTeF eeF þ eTeGeeG �9=;
6 Ee
_e
24 35TCT
1AT0ðMÞ þ AT
0ðMÞC1
þ2c�11 CT
1C1 þ 2ðc1 þ c2Þðe21 þ e2
3ÞIP�CT
1 þ AT0ðMÞC2
� �C2 �CT2 þ 2c�1
2 CT2C2
2666664
3777775e
_e
24 358>>>>><>>>>>:
9>>>>>=>>>>>;6 0:
By the Schur complement, we could have the following inequality
CT1AT
0ðMÞ þ AT0ðMÞC1
þ2ðc1 þ c2Þðe21 þ e2
3ÞIP � CT
1 þ AT0ðMÞC2 CT
1 0
� �ðC2 þ CT2Þ 0 CT
2
� � � 12 c1 0
� � � � 12 c2
2666666666664
37777777777756 0:
ðA:15Þ
By Schur complement, the above inequality (A.15) is equivalent to
2ðc1 þ c2Þðe21 þ e2
3ÞI þ ðP � CT1ÞðC2 þ CT
2Þ�1ðP � CT
1ÞT þ 2c�1
1 CT1C1 þ 2c�1
2 CT2C2
6 � CT1A0ðMÞ þ AT
0ðMÞC1
�� AT
0ðMÞC2
�ðC2 þ CT
2Þ�1 AT
0ðMÞC2
�T
i.e. if the inequality (15) holds, then the TdCCN which is free ofintracellular perturbations and time-delay processes can be ro-bustly synchronized.
A.4. Proof of Proposition 3
Consider a Lyapunov function V(e) > 0 for the cellular network(17), with the similar procedure in Appendix A.1, we have
Ef _Vg ¼ E@VðeÞ@e
� �T eF þ eG þ DeF þ DeG � dwdtþ DeF s þ DeGs
� dws
dt
� �(
þ 12
DeF þ DeG �T @2V@e2 DeF þ DeG �
þ 12
DeF s þ DeGs
�T @2V@e2 DeF s þ DeGs
�þ 1
2@V@e
� �T eHev þ12
eTveHT @V
@e
� �)
6 E@VðeÞ@e
� �T
ðeF þ eGÞ þ 12
DeF þ DeG �T @2V@e2
DeF þ DeG �(
þ 12
DeF s þ DeGs
�T @2V@e2
DeF s þ DeGs
�þ 1
4q2
@V@e
� �T eHJJ� eHT @V@e
� �
þ q2eTvðJ�ÞþJþev þ ðeTe� eT eÞ
)
¼ E@VðeÞ@e
� �T
ðeF þ eGÞ þ 12
DeF þ DeG �T @2V@e2 DeF þ DeG �(
þ 12
DeF s þ DeGs
�T @2V@e2 DeF s þ DeGs
�þ 1
4q2
@V@e
� �T eHJJ� eHTðeÞ @V@e
� �
þ eT e� eT e� q2vTv� �)
where J⁄ is the Hermitian transpose of matrix J, J+ is the pseudo-in-verse of matrix J. Therefore, if the HJI (21) holds, then we haveEf _Vg 6 E �ðeT e� q2vTvÞ
� �. After integrating the above HJI from 0
toTas Appendix A.1, the robust synchronized coupled cellular net-work can filter intercellular disturbances under a desired attenua-tion value q in probability if (21) holds for the nonlinear TdCCN in(17).
A.5. Proof of Proposition 4
With a similar procedure in Appendix A.2, consider a Lyapunovfunction with the following quadratic form
VðeÞ ¼ eT PeþZ t
t�sðtÞeTðsÞPseðsÞdsþ
Z 0
�a
Z t
tþr_eTðsÞQ _eðsÞds dr
via the help of Lemma 2 and the bounded approximation error (25),we have the differential equation of V(e) as follows

EdVðeÞ
dt
�6 E
e_e
es
264375
T N01;1 N0
1;2 N01;3
� N02;2 N0
2;3
� � N03;3
26643775
e_e
es
264375þ 2 eTCT
1 þ _eTCT2
� XK
k¼1
MkC0;kev þ eeH !8>><>>:
9>>=>>;
6 E
e_e
es
264375
T N01;1 N0
1;2 N01;3
� N02;2 N0
2;3
� � N03;3
26643775
e_e
es
264375þ 2eTCT
1
PKk¼1
MkC0;kev þ 2 _eTCT2
PKk¼1
MkC0;kev
þc�11 eTCT
1C1eþ c�12 _eTCT
2C2 _eþ ðc1 þ c2ÞeTeHeeH
8>>>>><>>>>>:
9>>>>>=>>>>>;
6 E
e_e
es
264375
T N01;1 N0
1;2 N01;3
� N02;2 N0
2;3
� � N03;3
26643775
e_e
es
264375þ 2eTCT
1
PKk¼1
MkC0;kev þ 2 _eTCT2
PKk¼1
MkC0;kev
þc�11 eTCT
1C1eþ c�12 _eTCT
2C2 _eþ eTvðc1 þ c2Þe2
9ev
8>>>>><>>>>>:
9>>>>>=>>>>>;
¼ E
e_e
es
ev
2666437775
T N01;1 þ c�1
1 CT1C1 N0
1;2 N01;3 N0
1;4
� N02;2 þ c�1
2 CT2C2 N0
2;3 N02;4
� � N03;3 0
� � � ðc1 þ c2Þe29I
2666664
3777775e_e
es
ev
2666437775
8>>>>><>>>>>:
9>>>>>=>>>>>;
ðA:16Þ
P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134 133
where N01;4 ¼ CT
1
PKk¼1MkC0;k ; N0
2;4 ¼ CT2
PKk¼1MkC0;k. Through the
similar procedure of Lemma3 in Appendix A.2, the interpolationfunction Mk for k = 1, . . . ,Kcould be separated from the linear matrixinequality. If the inequality (26) holds with Nð3Þi;j which is defined in(26), then _V 6 �ðeT e� q2vTvÞ for every e; _e; es, and ev, i.e. when theinequality (26) holds, the robustly synchronized TdCCN could filterthe intercellular disturbance under the disturbance filtering abilityq.
References
[1] C. Fuqua et al., Regulation of gene expression by cell-to-cell communication:acyl-homoserine lactone quorum sensing, Annual Review of Genetics 35(2001) 439.
[2] K. Xavier, B. Bassler, LuxS quorum sensing: more than just a numbers game,Current Opinion in Microbiology 6 (2003) 191.
[3] C. Gera, S. Srivastava, Quorum-sensing: the phenomenon of microbialcommunication, Current Science 90 (2006) 666.
[4] D. Hong et al., Extracellular noise-induced stochastic synchronization inheterogeneous quorum sensing network, Journal of Theoretical Biology 245(2007) 726.
[5] A. Lazdunski et al., Regulatory circuits and communication in Gram-negativebacteria, Nature Reviews Microbiology 2 (2004) 581.
[6] K. Nealson et al., Cellular control of the synthesis and activity of the bacterialluminescent system, Journal of Bacteriology 104 (1970) 313.
[7] C. Li et al., Stochastic synchronization of genetic oscillator networks, BMCSystems Biology 1 (2007) 6.
[8] A. Hu, Z. Xu, Stochastic linear generalized synchronization of chaotic systemsvia robust control, Physics Letters A 372 (2008) 3814.
[9] J. Qiu, J. Cao, Global synchronization of delay-coupled genetic oscillators,Neurocomputing 72 (2009) 845.
[10] V.N. Belykh et al., Connection graph stability method for synchronized coupledchaotic systems, Physica D: Nonlinear Phenomena 195 (2004) 159.
[11] C.W. Wu, Synchronization in networks of nonlinear dynamical systemscoupled via a directed graph, Nonlinearity 18 (2005) 1057.
[12] M. Chen, Chaos synchronization in complex networks, IEEE Transactions onCircuits and Systems-I – Regular Papers 55 (2008) 1335.
[13] W. Yu et al., Global synchronization of linearly hybrid coupled networks withtime-varying delay, SIAM Journal on Applied Dynamical Systems 7 (2008) 108.
[14] J. Zhou et al., Adaptive synchronization of an uncertain complex dynamicalnetwork, IEEE Transactions on Automatic Control 51 (2006) 652.
[15] J. Lu, J. Cao, Adaptive synchronization of uncertain dynamical networks withdelayed coupling, Nonlinear Dynamics 53 (2008) 107.
[16] J. Lu, G. Chen, A time-varying complex dynamical network model and itscontrolled synchronization criteria, IEEE Transactions on Automatic Control 50(2005) 841.
[17] J. Lu et al., Characterizing the synchronizability of small-world dynamicalnetworks, IEEE Transactions on Circuits and Systems I: Fundamental Theoryand Applications 51 (2004) 787.
[18] R. Wang et al., Modeling and analyzing biological oscillations in molecularnetworks, Proceedings of the IEEE 96 (2008) 1361.
[19] H. Liu et al., Structure identification of uncertain general complex dynamicalnetworks with time delay, Automatica 45 (2009) 1799.
[20] W. Yu et al., Estimating uncertain delayed genetic regulatory networks: anadaptive filtering approach, IEEE Transactions on Automatic Control 54 (2009)892.
[21] J. Garcia-Ojalvo et al., Modeling a synthetic multicellular clock: Repressilatorscoupled by quorum sensing, Proceedings of the National Academy of Sciences101 (2004) 10955.
[22] D. Gonze et al., Stochastic models for circadian rhythms: effect of molecularnoise on periodic and chaotic behaviour, Comptes Rendus-Biologies 326(2003) 189.
[23] R.J. Johnston et al., MicroRNAs acting in a double-negative feedback loop tocontrol a neuronal cell fate decision, Proceedings of the National Academy ofSciences 102 (2005) 12449.
[24] E. Ruby, K. Lee, The Vibrio fischeri-Euprymna scolopes light organ association:current ecological paradigms, Applied and Environmental Microbiology 64(1998) 805.
[25] Z. Yang et al., Adaptive synchronization of an uncertain complex delayeddynamical networks, International Journal of Nonlinear Science 3 (2007)93.
[26] M. Vidyasagar, Nonlinear Systems Analysis, Society for IndustrialMathematics, 2002.
[27] S.P. Boyd et al., Linear Matrix Inequalities in System and Control Theory:Society for Industrial and Applied, 1994.
[28] L. Magni et al., Nonlinear model predictive control: towards new challengingapplications book, Lecture Notes in Control and Information Sciences, 2009.
[29] D.J. Ferullo et al., Cell cycle synchronization of Escherichia coli using thestringent response, with fluorescence labeling assays for DNA content andreplication, Methods 48 (2009) 8.
[30] M. Heinemann, S. Panke, Synthetic biology-putting engineering into biology,Bioinformatics 22 (2006) 2790.
[31] M. Karn et al., Stochasticity in gene expression: from theories to phenotypes,Nature Reviews Genetics 6 (2005) 451.
[32] B. Chen, Y. Chang, A systematic molecular circuit design method for genenetworks under biochemical time delays and molecular noises, BMC SystemsBiology 2 (2008) 103.
[33] C.W. Wu, L.O. Chua, Synchronization in an array of linearly coupled dynamicalsystems, IEEE Transactions on Circuits and Systems I: Fundamental Theory andApplications 42 (1995) 430.
[34] J. Zhang et al., Synchronization and clustering of synthetic genetic networks: Arole for cis-regulatory modules, Physical Review E 79 (2009) 41903.
[35] W. Rudin, J. Cofman, Principles of Mathematical Analysis, McGraw-Hill, NewYork, 1964.
[36] B.S. Chen, W.H. Chen, Robust H2/H1 Global linearization filter Design forNonlinear Stochastic Systems, 2008.
[37] R. Liu et al., On global linearization, SIAM-AMS Proceeding (1969) 93.[38] W.J. Gordon, J.A. Wixom, Shepard’s method of’’ metric interpolation’’ to
bivariate and multivariate interpolation, Mathematics of Computation 32(1978) 253.
[39] P. Gahinet et al., The LMI control toolbox, 1994.

134 P.-W. Chen, B.-S. Chen / Mathematical Biosciences 232 (2011) 116–134
[40] J. Keener et al., Mathematical Physiology: Cellular Physiology, Springer Verlag,2008.
[41] C. Wu, Synchronization in arrays of coupled nonlinear systems with delay andnonreciprocal time-varying coupling, IEEE Transactions on Circuits andSystems II: Express Briefs 52 (2005) 282.
[42] S. Hooshangi, W. Bentley, From unicellular properties to multicellularbehavior: bacteria quorum sensing circuitry and applications, CurrentOpinion in Biotechnology 19 (2008) 550.
[43] W. Zhang, B. Chen, H-inf control for nonlinear stochastic systems, SIAM Journalof Control Optimization 44 (2006) 1973.
[44] A. Taylor et al., Dynamical quorum sensing and synchronization in largepopulations of chemical oscillators, Science 323 (2009) 614.
[45] P. Gahinet et al., LMI Control Toolbox for Use with Matlab, The MATH WorksInc., 1995.
[46] D. Henrion, J.B. Lasserre, GloptiPoly: Global optimization over polynomialswith Matlab and SeDuMi, ACM Transactions on Mathematical Software 29(2003) 165.
[47] R. Nikoukhah et al., LMITOOL: a Package for LMI Optimization in Scilab,Rapport technique, vol. 170.
[48] Y. Nesterov, A. Nemirovsky, Interior-point polynomial methods in convexprogramming, Studies in Applied Mathematics, vol. 13, SIAM, Philadelphia, PA,1994.
[49] M. Yamashita et al., Implementation and evaluation of SDPA 6.0 (semidefiniteprogramming algorithm 6.0), Optimization Methods and Software 18 (2003)491.
[50] M. Ko vara, M. Stingl, PENNON: A code for convex nonlinear and semidefiniteprogramming, Optimization Methods and Software 18 (2003) 317.
[51] P. Swain et al., Intrinsic and extrinsic contributions to stochasticity in geneexpression, Proceedings of the National Academy of Sciences 99 (2002) 12795.
[52] B. Chen, X. Liu, Delay-dependent robust H_inf control for T–S fuzzy systemswith time delay, IEEE Transactions on Fuzzy Systems 13 (2005) 544.
[53] B.S. Chen et al., Mixed H2/H1 fuzzy output feedbackcontrol design fornonlinear dynamic systems: an LMI approach, IEEE Transactions on FuzzySystems 8 (2000) 249.
[54] T. Danino et al., A synchronized quorum of genetic clocks, Nature 463 (2010)326.
[55] L. You et al., Programmed population control by cell-cell communication andregulated killing, Nature 428 (2004) 868.
[56] A. Pai et al., Engineering multicellular systems by cell–cell communication,Current Opinion in Biotechnology (2009).
[57] H. Kaplan, E. Greenberg, Diffusion of autoinducer is involved in regulation ofthe Vibrio fischeri luminescence system, Journal of Bacteriology 163 (1985)1210.
[58] J.F. Sturm, Implementation of interior point methods for mixed semidefiniteand second order cone optimization problems, Optimization Methods andSoftware 17 (2002) 1105.
[59] K. Brenner et al., Engineered bidirectional communication mediates aconsensus in a microbial biofilm consortium, Proceedings of the NationalAcademy of Sciences 104 (2007) 17300.
[60] G. Chen, Linear Stochastic Control Systems, CRC Press, 1995.[61] Y.-T. Chang, B.-S. Chen, A fuzzy approach for robust reference tracking control
design of nonlinear distributed parameter time-delayed systems and itsapplication, IEEE Transactions on Fuzzy Systems 18 (2010) 1144.