Embed Size (px)
Citation preview

Robot Assisted Cardiac Surgery
Course: Cardiovascular Imaging
Submitted by: Alper Yaman
Instructor: Assoc. Prof. Dr. Cengizhan Öztürk

What is robot assisted surgery?
Application of computer assisted robotics to enhance surgeon’s capability to carry out various “minimally invasive” surgical procedures.

The advantages of robotic surgery
Faster, easier and steadier surgery
More accuracy
Enhanced visualisation, zooming
Minimally invasive [1].

The advantages of robotic surgery 2
Less pain to patient
Shorter recovery time
Shorter hospital stays [1]

Robot Assisted Surgery Approach
Perception & imaging by sensors and cameras
to monitor the heart

Robot Assisted Surgery Approach 2
Arms and wrists for clamping, suturing, and severing.
Control Panel

Technical Information
Registration Preoperative images (CT or MRI) are registered both to stabilize target point images on the monitor and to guide the manipulators [2].ImagingFast video cameras are used to obtain operative images.

Technical Information 2
Robot Positioning
Optimal position of the robot should be provided concerning with degrees of freedom of the manipulator [2].

Technical Information 3
Port Placement: Entry points are selected by images on the port.
Robot is registered to the patient.
Ports are expressed in the robot coordinate frame and used to guide the surgeon [2].

Heart Beat Synchronization“Motion Cancelling Robot System”
Visual Synchronization: Provides stabilized target point images on the monitor. Motion Synchronization: The slave robot is synchronized with the heart beat. Master – Slave Control: Transfers the master motion to control the slave robot [3].

Heart Beat Synchronization “Motion Cancelling Robot System”
[3]

Haptics and Augmented Reality
HapticsApplying tactile sensation and control to interaction with computer applications.Augmented RealityComputer graphics are superimposed or composited with real images.

Haptic Virtual Fixtures
Software-generated force and position signals applied to human operators.
To improve the safety, accuracy, and speed of manipulation tasks.
Integrates robots accuracy and precision with human intelligence [4].

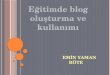
Haptic Virtual Fixtures 2
Guidance Virtual Fixtures: guides the robot along desired paths (a).
Forbidden-Region Virtual Fixtures: Keep the robot out of forbidden regions (b). [4]
[4]

An example to robots“Da Vinci Surgical System”
Intuitive nature of the surgeon’s hand movements
Components: A surgeon consolePatient-side cart Instruments Image processing equipment

An example to robots“Da Vinci Surgical System” 2
Benefits For The Surgeon:
Improved dexterity
Enhanced 3D visualisation and magnification
Greater surgical precision
Increased range of motion
Better ergonomics

An example to robots“Da Vinci Surgical System” 3
Robotic articulated instrumentation daVinci prototype 1997 [5]

An example to robots
Leipzig 1998 [5]

Current Operations with daVinci
Atrial septal defect closure
Internal thoracic artery take-down
Endoscopic coronary bypass
LV bipolar pacing lead placement
Mitral valve repairment and replacement
Ablation of atrial fibrillation [5]

Current Operations with daVinci 2
[5]

Current Operations with daVinci 3
[5]

Transmyocardial Revascularization
Laser is used to open tiny holes (transmyocardial channels) on myocardium.
Angiogenesis: Laser stimulates new blood vessels to grow.
Channels heal on the outside but remain open on the inside. [6]

Transmyocardial Revascularization 2
[6]

Results and DiscussionRobot assisted cardiac surgery is combining various disciplines: robotics, computer vision and biomedical engineering. It’s advantages are:Faster, easier and steadier surgeryMore accuracyEnhanced visualisation, zoomingMinimally invasiveLess pain to patientShorter recovery timeShorter hospital stays

References1. E. Adams, Bibliography: Robotic Surgery, Technology Assessment
Program, Office of Patient Care Services, Boston, March 2004.2. `E. Coste-Mani`ere and L. Adhami. Optimal Planning of Robotically Assisted
Heart Surgery: Transfer Precision in the Operating Room. The International Journal of Robotics Research, Vol. 23, No. 4-5, 539-548 (2004).
3. Y. Nakamura, K. Kishi, and H. Kawakami. Heartbeat Synchronization for Robotic Cardiac Surgery. Proc. of the IEEE. International Conf. On Robotics&Automation, pp. 2014-2019, 2001.
4. J. J. Abbott, P. Marayong, and A. M. Okamura, "Haptic Virtual Fixtures for Robot-Assisted Manipulation," 12th International Symposium of Robotics Research, 2005. (accepted).
5. W. R. Chitwood. Robotic Cardiac Surgery. 90th Annual Clinical Congress , American College of Surgeons, New Orleans, 2004.
6. Cleveland Clinic Heart Center web page, http://www.clevelandclinic.org/heartcenter/pub/guide/disease/cad/TMR.htm

Thank you
for your attention!