Embed Size (px)
Citation preview

Rifat M. Ramović
Workstation
Workstation IBM Compatible
Workstation
Satellite dish
Radio tower
Satellite dish
Satellite dish
!!!
!!!
PPOOUUZZDDAANNOOSSTT SSIISSTTEEMMAA EELLEEKKTTRROONNSSKKIIHH,, TTEELLEEKKOOMMUUNNIIKKAACCIIOONNIIHH II IINNFFOORRMMAACCIIOONNIIHH
Beograd 2005. god.

Dr Rifat M. Ramović, prof.
POUZDANOST SISTEMA ELEKTRONSKIH, TELEKOMUNIKACIONIH I INFORMACIONIH
Recezenti: Dr Vitomir Milanović, prof.
Dr Slavko Pokorni, pukovnik, prof. Dr Zoran Petrović, prof.
Izdavač: Katedra za Mikroelektroniku i tehničku fiziku
Tehnička obrada: Nemanja Lj. Đoković, dipl. ing.
Beograd 2005. god.

PREDGOVOR
Razvoj teorije pouzdanosti rezultat je velikog tehničko-tehnološkog napretka u dvadesetom veku. Vremenom, sve složeniji sistemi preuzimali su u automatizovanim procesima sve veći broj ljudskih obaveza. Jasno je da su ti sistemi morali da zadovolje određene kriterijume po pitanjima ispravnog rada, eksploatacije i održavanja. Dakle, bilo je potrebno dati odgovore na pitanja kvantitativne ocene pouzdanosti jednog sistema (ili uređaja), kao i na pitanja kako pouzdanost komponenti i održavanje sistema utiče na rad istog. Može se reći da je teorija pouzdanosti svoj največi razvoj doživela kroz elektrotehniku. Glavni razlozi za to leže u činjenicama da je u elektrotehnici najlakše vršiti merenja pouzdanosti i upoređivati sa teorijskim predviđanjima. Takođe, pošto su elektronske naprave generalno sastavljene od mnogo više komponenti nego, recimo, mehaničke, jasno je da je za njih potrebniji i mnogo složeniji proračun pouzdanosti. Korišćenjem matematike otkrivene su nove metode koje omogućavaju da pri projektovanju, izradi i eksploataciji elemenata sklopova se postigne zavidan nivo pouzdanosti. Nagli razvoj informatike i pojava veoma moćnih računara omogućile su izvođenje izuzetno složenih simulacija funkcionisanja sistema.
Pouzdanost kao naučna disciplina se već dugi niz godina neguje na Elektrotehničkom fakultetu u Beogradu. Formirano je i nekoliko kurseva (predmeta) koji tretiraju problematiku pouzdanosti kao što su: Pouzdanost mikroelektronskih naprava, Pouzdanost i efektivnost tehničkih sistema, Pouzdanost i raspoloživost telekomunikacionih sistema, Pouzdanost telekomunikacionih mreža i drugi.
Autor ove knjige izvodio je i izvodi nastavu iz navedenih predmeta i ima veliko iskustvo iz analize pouzdanosti tehničkih sistema. Urađen je određeni broj projekata i objavljeno više naučnih radova iz modelovanja pouzdanosti i raspoloživosti telekomunikacionih sistema. Izbor materijala za knjigu baziran je na stečenom iskustvu, a prilagođen je nastavnom planu predmeta Pouzdanost sistema (elektronskih, telekomunikacionih i informacionih) koji će se po najnovijem nastavnom planu i programu (usvojenom 2005. god.) predavati na završnim godinama redovnih (dodiplomskih) studija. Međutim knjiga može korisno poslužiti širokom krugu ljudi koji se zanimaju za problematiku pouzdanosti tehničkih sistema.
Koristim priliku da se zahvalim recezentima prof. dr Vitomiru Milanoviću, prof. dr Slavku Pokornom, pukovniku i prof. dr Zoranu Petroviću na stručno obavljenoj recenziji i korisnim sugestijama pri izradi knjige. Takođe se zahvaljujem dipl. ing. Nemanji Đokoviću za kvalitetnu tehničku i stručnu obradu.
Biću zahvalan svima koji mi ukažu na propuste, greške i nedostatke ove knjige.
Beograd 2005. Autor

Sadržaj
i
SADRŽAJ
1. UVOD......................................................................................................................................................................... 1
2. POKAZATELJI POUZDANOSTI.......................................................................................................................... 5 2.1. Određivanje pokazatelja pouzdanosti................................................................................................................. 5 2.2. Funkcije raspodele otkaza, pouzdanosti i gustine otkaza................................................................................... 7 2.3. Funkcija intenziteta otkaza................................................................................................................................. 7 2.4. Očekivano vreme bezotkaznog rada ................................................................................................................... 9 2.5. Funkcija intenziteta otkaza i vek trajanja sistema............................................................................................ 10
3. OTKAZI ELEMENATA I SISTEMA................................................................................................................... 12
4. NEKI ZAKONI RASPODELE SLUČAJNIH VELIČINA KOJE SE KORISTE U TEORIJI POUZDANOSTI ......................................................................................................................................................... 17
4.1. Slučajni događaj. Verovatnoća događaja. Slučajne veličine i zakoni njihove raspodele................................. 17 4.1.1. Funkcija raspodele. Niz raspodele ........................................................................................................... 18 4.1.2. Gustina raspodele..................................................................................................................................... 20 4.1.3. Brojne karakteristike slučajnih veličina ................................................................................................... 21
4.2. Neki kontinualni zakoni raspodele pojvljivanja otkaza .................................................................................... 24 4.2.1. Eksponencijalna raspodela ....................................................................................................................... 24 4.2.2. Normalna raspodela ................................................................................................................................. 26 4.2.3. Lognormalna raspodela............................................................................................................................ 30 4.2.4. Vajbulova raspodela................................................................................................................................. 33 4.2.5. Gama raspodela........................................................................................................................................ 35 4.2.6. Beta raspodela.......................................................................................................................................... 38 4.2.7. Studentova raspodela ............................................................................................................................... 40 4.2.8. Fišerova raspodela, Snedekorova raspodela............................................................................................ 41
4.3. Neki diskretni zakoni raspodele za proračun pouzdanosti ............................................................................... 41 4.3.1. Binomna raspodela................................................................................................................................... 41 4.3.2. Poasonova raspodela ................................................................................................................................ 44 4.3.3. Geometrijska raspodela............................................................................................................................ 45 4.3.4. Hipergeometrijska raspodela.................................................................................................................... 46
5. ODREĐIVANJE ZAKONA RASPODELE NA OSNOVU EMPIRIJSKIH PODATAKA.............................. 47 5.1. Određivanje zakona raspodele grafičkim metodama ....................................................................................... 47
5.1.1. Određivanje zakona raspodele na osnovu empirijske funkcije raspodele (metodom konstrukcije histograma) ........................................................................................................................................................ 47 5.1.2. Određivanje funkcije raspodele verovtnoće primenom papira vervoatnoće ............................................ 49
5.2. Određivanje zakona raspodele analitičkim metodama..................................................................................... 54 5.2.1. Određivanje zakona raspodele metodom momenata................................................................................ 54 5.2.2. Određivanje zakona raspodele metodom maksimalne verodostojnosti.................................................... 54
5.3. Određivanje tačnosti parametara raspodele .................................................................................................... 55
6. ANALIZA POUZDANOSTI DVOSTACIONARNIH SISTEMA...................................................................... 58 6.1. Metode određivanja pouzdanosti vremenski nezavisniih sistema..................................................................... 58
6.1.1. Pouzdanost u slučaju redne veze blokova pouzdanosti............................................................................ 58 6.1.2. Pouzdanost u slučaju paralelne konfiguracije blokova pouzdanosti ........................................................ 59 6.1.3. Pouzdanost u slučaju kombinovane konfiguracije blokova pouzdanosti ................................................. 61 6.1.4. Određivanje pouzdanosti metodom rastavljanja ...................................................................................... 63 6.1.5. Pouzdanost u slučaju modela „r od n“ ..................................................................................................... 64 6.1.6. Pouzdanost u slučaju pripravnosti............................................................................................................ 66

Sadržaj
ii
6.2. Metode određivanja pouzdanosti vremenski zavisnih sistema.......................................................................... 67 6.2.1. Pouzdanost u slučaju redne konfiguracije elemenata............................................................................... 67 6.2.2. Pouzdanost u slučaju paralelne konfiguracije elemenata ......................................................................... 69 6.2.3. Pouzdanost u slučaju pripravnosti............................................................................................................ 71
7. ANALIZA POUZDANOSTI SISTEMA SA VIŠESTACIONARNIM ELEMENTIMA.................................. 77 7.1. Pouzdanost u slučaju višestacionarnih vremenski zavisnih elemenata ............................................................ 86
8. EFEKTIVNOST SISTEMA I POKAZATELJI EFEKTIVNOSTI.................................................................... 88 8.1. Koncepti efektivnosti sistema............................................................................................................................ 88 8.2. Pokazatelji efikasnosti sistema ......................................................................................................................... 90 8.3. Vremenske kategorije efektivnosti sistema ....................................................................................................... 93
9. PRORAČUN POUZDANOSTI KOMPONENATA SISTEMA METODOM MIL - HDBK- 217D................ 95 9.1. Opšte napomene ............................................................................................................................................... 95
9.1.1. Osnovna podela........................................................................................................................................ 95 9.1.2. Faktor kvaliteta ........................................................................................................................................ 96 9.1.3. Faktor amibijenta ..................................................................................................................................... 96 9.1.4. Ostali korekcioni faktori .......................................................................................................................... 97
9.2.Mikroelektronska kola ....................................................................................................................................... 98 9.3. Diskretni poluprovodnici................................................................................................................................ 102 9.4. Vakuumske cevi .............................................................................................................................................. 106 9.5. Laseri.............................................................................................................................................................. 107 9.6. Otpornici ........................................................................................................................................................ 108 9.7. Kondenzatori .................................................................................................................................................. 112 9.8. Induktivni elementi ......................................................................................................................................... 118 9.9. Motori............................................................................................................................................................. 121 9.10. Relea............................................................................................................................................................. 123 9.11. Prekidači ...................................................................................................................................................... 124 9.12. Konektori ...................................................................................................................................................... 125 9.13. Štampane ploče............................................................................................................................................. 127 9.14. Spojevi .......................................................................................................................................................... 127 9.15. Ostali elementi.............................................................................................................................................. 128
10. PRORAČUN POUZDANOSTI POMOĆU MARKOVLJEVIH MODELA ................................................. 129 10.1. Markovljevi modeli ....................................................................................................................................... 129
10.1.1. Poasonov proces................................................................................................................................... 129 10.2. Matrica verovatnoća prelaza........................................................................................................................ 134 10.3. Rešavanje jednačina Markova...................................................................................................................... 134 10.4. Određivanje pouzdanosti nepopravljivih sistema......................................................................................... 138
10.4.1. Oređivanje pouzdanosti nepopravljivog sistema sa jednim elementom............................................... 138 10.4.2. Određivanje pouzdanosti nepopravljivog sistema sa dva elementa .......................................................... 141 10.5. Pouzdanost i raspoloživost popravljivih sistema.......................................................................................... 147
10.5.1. Pouzdanost i raspoloživost popravljivog sistema sa jednim elementom.............................................. 148 10.5.2. Pouzdanost i raspoloživost popravljivog sistema sa rednom vezom dva elementa.............................. 153

Sadržaj
iii
10.5.3. Pouzdanost i raspoloživost popravljivog sistema sa paralelnom vezom dva elementa ili sa jednim aktivnim elementom i jednim elementom u pripravnosti................................................................................. 156 10.5.4. Proračun pouzdanosti i raspoloživosti sistema kada intenziteti otkaza i popravke nisu konstantni ..... 164
10.6. Teorija obnavljanja ...................................................................................................................................... 168
11. ALOKACIJA POUZDANOSTI......................................................................................................................... 175 11.1. Pojam alokacije pouzdanosti........................................................................................................................ 175 11.2. Metode alokacije pouzdanosti ...................................................................................................................... 176
11.2.1. Metoda jednake alokacije..................................................................................................................... 176 11.2.2. AGREE metoda alokacije .................................................................................................................... 177 11.2.3. ARINC metoda alokacije ..................................................................................................................... 179 11.2.4. Metoda alokacije uz minimalan uložen napor...................................................................................... 182
12. UGRADNJA POUZDANOSTI U KONSTRUKCIJU NOVOG UREĐAJA ................................................. 185 12.1. Pouzdanost u procesu konstruisanja ............................................................................................................ 185 12.2. Pogodnost održavanja u procesu konstruisanja ........................................................................................... 185 12.3. Principi konstruisanja u pogledu pouzdanosti ............................................................................................. 187 12.4. Pogodnost održavanja i pouzdanost uređaja................................................................................................ 189
13. OPTIMIZACIJA TROŠKOVA POUZDANOSTI........................................................................................... 190 13.1. Različiti aspekti troškova pouzdanosti.......................................................................................................... 190 13.2. Matematički model optimizacije troškova pouzdanosti ................................................................................ 192 13.3. Matematički model za utvrđivanje opravdanosti multipliciranja elemenata................................................ 193
14. POUZDANOST SOFTVERA ............................................................................................................................ 195 14.1. Kvalitet softvera............................................................................................................................................ 195 14.2. Pokazatelji pouzdanosti softvera .................................................................................................................. 197 14.3. Greške u softveru.......................................................................................................................................... 199 14.4. Modelovanje pouzdanosti softvera ............................................................................................................... 202
15. POUZDANOST I RASPOLOŽIVOST TELEKOMUNIKACIONIH SISTEMA......................................... 205 15.1. Uvod ............................................................................................................................................................. 205
15.1.1. Prstenaste i paučinaste strukture .......................................................................................................... 206 15.1.2. Metod prekrivanja prstenova................................................................................................................ 208 15.1.3. Osnovni model paučinaste strukture .................................................................................................... 209 15.1.4. Vrste paučinastih modela ..................................................................................................................... 210 15.1.5. Koncept p – krugova ........................................................................................................................... 212
15.2. Mreže za Internet saobraćaj ......................................................................................................................... 214 15.2.1. Sposobnost brzog oporavka kod IP/MPLS modela.............................................................................. 215
15.2.1.1. Statičke šeme za oporavak ..................................................................................................... 215 15.2.1.2. Dinamičke ION šeme za oporavak ........................................................................................ 216
15.2.2. Rekonfiguracija IP topologije .............................................................................................................. 218 15.3. Projektovanje IP mreža ................................................................................................................................ 219
15.3.1. QoS (kvalitet servisa)........................................................................................................................... 219 15.3.2. Diferencirani QoS ................................................................................................................................ 219 15.3.3. Proširenje QoS-a .................................................................................................................................. 220 15.3.4. MPLS opcije za oporavak .................................................................................................................... 221 15.3.5. Veza RD-QoS-a i MPLS mehanizama oporavka ................................................................................. 223 15.3.6. Upravljanje transportom kod RD-QoS arhitekture .............................................................................. 223
15.4. Uticaj kvarova na mreže sa bežičnim pristupom .......................................................................................... 226

Sadržaj
iv
15.4.1. Uvodna razmatranja ............................................................................................................................. 226 15.4.2. Osnovni model za projektovanje preživljivih mreža sa bežičnim pristupom....................................... 227 15.4.3. Analiza preživljivosti GSM mreža....................................................................................................... 228
15.5. UMTS: projektovanje pouzdane mreže za pristup ........................................................................................ 231 15.5.1. PTA algoritam...................................................................................................................................... 234 15.5.2. Algoritmi za povećavanje pouzdanosti ................................................................................................ 234
15.5.2.1. GRE algoritam ....................................................................................................................... 235 15.5.2.2. RRE algoritam ....................................................................................................................... 235
15.6. Pouzdanost i raspoložovost složenih sistema komunikacija ......................................................................... 237 15.6.1. Inteziteti otkaza komponenata, modula, uređaja i kanala veza ............................................................ 237 15.6.2. Tipične vrednosti pouzdanosti za prenosne sisteme............................................................................. 237 15.6.3. Pouzdanost i raspoloživost telefonske mreže....................................................................................... 237
15.6.3.1. Raspoloživost usled otkaza .................................................................................................... 237 15.6.3.2. Servis raspoloživosti .............................................................................................................. 238 15.6.3.2.1. Telefonski servisi ................................................................................................................ 239
15.6.4. Granične vrednosti za raspoloživost i pouzdanost sistema .................................................................. 241 15.6.5. Granične vrednosti za mrežne elemente............................................................................................... 243
15.6.5.1. Grupa kanala i kanal .............................................................................................................. 243 15.6.5.2. Uređaji linijskih prenosnih sistema........................................................................................ 244 15.6.5.3. Multipleksni i pomoćni uređaji za terminale.......................................................................... 246
15.6.6. Uputstva za raspodelu osnovnih resursa u zavisnosti od ulaganja ....................................................... 246 15.6.6.1. Napajanje ............................................................................................................................... 246 15.6.6.2. Linijski sistemi....................................................................................................................... 247 15.6.6.3. Prenosne deonice ................................................................................................................... 247 15.6.6.4. Klase kanala u zavisnosti od raspoloživosti.......................................................................... 247 15.6.6.5. Raspored mreža...................................................................................................................... 247 15.6.6.6. Centrale.................................................................................................................................. 248
LITERATURA.......................................................................................................................................................... 249

Uvod
1
1. UVOD
U svakodnevnom životu vrlo često su u upotrebi pojmovi koji se odnose na pouzdanost tehničkih proizvoda i objekata. Njihovo značenje se obično podrazumeva. Međutim, radi kvantitativnog određivanja pojednih veličina i parametara koji karakterišu te pojmove neophodno ih je precizno definisati. Egzaktan pristup ovom problemu bazira se na teoriji pouzdanosti kao naučnoj disciplini koja se bavi proučavanjem zakonitosti kojih se treba pridžavati pri projektovnju, konstrukciji, ispitivanju, proizvodnji i eksploataciji tehničkih proizvoda kako bi oni imali što duži radni vek a time i maksimalni radni učinak.
U zavisnosti od preciznosti, za pouzdanost kao pojam mogu se sresti definicije koje se međusobno neznatno razlikuju.
Najjednostavnije rečeno pouzdanost je sposobnost objekta (komponente, uređaja, sistema) da uspešno obavlja zadatu mu funkciju, pod određenim uslovima, u datom vremenskom intervalu.
Šta je, zapravo, pouzdanost najpotpunije objašnjava sledeća definicija:
Pouzdanost je vervotnoća, na određenom nivou poverenja, da će sistem uspešno, bez otkaza, obaviti funkciju za koju je namenjen, unutar specificranih granica performansi, u toku specificiranog vremena trajanja zadataka, kada se koristi na propisani način i u svrhu za koju je namenjen, pod specificiranim nivoima opterećenja, uzimajući u obzir i prethodno vreme korišćenja sistema.
Pa i u standardima pojeniih zemalja postoje neke male razlike u definiciji pojma pouzdanosti. Na primer:
Prema ruskom standardu (GOST) pouzdanost se definiše kao svojstvo objekta da ispunjava zadate funkcije i održava vrednost eksploatacionih parametara tokom vremena u zadatim granicama, koje su određene zadatim režimima i uslovima korišćenja, tehničkog opsluživanja, remonta, skladištenja i transporta.
Prema američkom MIL standardu pod pouzdanošću se podrazumeva verovtnoća da će neki predmet svoju namensku funkciju obavljati u datom vremenskom intervalu, pod zadatim uslovima.
Nemački standard DIN definiše pouzdanost kao sposobnost nekog proizvoda ili robe da zadovolji, u toku primene, uslovljene zahteve koji se postavljaju u pogledu ponašanja ili održavanja njihovih osobina za duži vremenski period.
Ove dfinicije ukazuju na kompleksnost pouzdanosti, koja u zavisnosti od namene objekata i uslova njegove eksploatacije može obuhvatiti bezotkaznost, trajnost, pogodnost za opravke ili sposobnost da se sačuva skup određenih svojstava u dužem vremenskom periodu, pri čemu se ta svojstva mogu odnositi na celokupan objekat ili samo na neke njegove delove.
U svim navedenim definicijama prisutna su dva nezaobilazna faktora : vreme rada i uslovi rada. Podaci koji se daju za pouzdanost objekta merodavni su samo u navedenom vremenskom intervalu i specificiranim uslovima korišćenja.
Vidi se da je pouzdanost verovatnoća, što znači broj između 0 i 1 ili 0 i 100%. Može se predstaviti kao odnos između broja uspešnih zadataka sistema ( )tn1 prema ukupnom broju ovih zadataka n :

Uvod
2
( ) ( )n
tntR 1ˆ = (1.1)
gde je t vreme trajanja zadatka. ( )tR̂ je procena pouzdanosti jer je broj zadataka sistema ( )tn konačan broj. Stvarna pouzdanost se dobija kada broj zadataka sistema teži beskonačnosti, tj.
( ) ( )tRtRn
ˆlim∞→
= (1.2)
Zbog nepodudarnosti procene sa stvarnom vrednošću, uvodi se pojam nivoa poverenja. To je verovatnoća da je neki parametar unutar datih granica ili je iznad donje granice. Statističke procene se obično predstavljaju u vidu intervala, uz verovatnoću tj. poverenje da će stvarna vrednost biti u tom intervalu. Krajnje tačke tog intervala zovu se granice poverenja. Ako se kaže, na primer, da je pouzdanost nekog sistema 0,95 na nivou poverenja 0,9 to znači da postoji rizik od 10% da je pouzdanost tog sistema manja od 0,95. Dakle, u toku konstruisanja nekog sistema, nije dovoljno samo postaviti zahtev u vezi sa vrednošću pouzdanosti koju sistem mora da zadovolji, već treba dodati i nivo poverenja tako da bude poznat rizik u vezi sa postizanjem te pouzdanosti.
Rad bez otkaza dobija se kada su sve performanse sistema u skladu sa specifikacijama. Prethodno vreme korišćenja sistema je veom važno i mora se uzeti u obzir prilikom izračunavanja pouzdanosti izvršenja tog zadatka. Matematički, to se može izraziti jednačinom:
( ) ),()( tTRTRtTR ⋅=+ (1.3)
Samo u slučaju konstantnih (slučajnih) otkaza pouzdanost ne zavisi od prethodnog vremena korišćenja tj. tada važi:
( ) ( ) )(, tRtTRtTR ==+ (1.4)
Vreme trajanja zadatka je obrnuto proprcionalno nivou pouzdanosti. Ako se želi veoma visoka pouzdanost onda vreme trajanja zadatka treba da je što kraće.
Neprekidni porast složenosti tehničkih sistema kao i značaj funkcije koju oni obavljaju neizbežno iziskuju neophodnost korišćenja i razvijanja ideja i metoda teorije pouzdanosti. Takav razvitak traži dobro poznavanje svih fizičkih i hemijskih procesa koji dovode do smanjenja pouzudanosti tehinčkih proizvoda kao i odgovarjaući odnos proizvođača prema tehnološkim procesima izrade, prema ispitivanju pouzdanosti i procesima čuvanja i transporta.
Nema sumnje da ideje, metode i rezultate teorije pouzdanosti moraju poznavti ne smao istraživači, nego i široki krug inženjera, ekonomista, matematičara, organizatora procesa proizvodnje te oblasti, što omogućuje izbegavanje mnogih grešaka koje se pojavljuju u fazi projektovanja ali i proizvodnje. Posledice nerazumevanja pouzdanosti mogu biti ogromni materijalni gubici, izgubljeno vreme, usporvanje tehnološkog napretka u mnogim vitalnim oblastima a u odrđenim slučajevima čak i ljudski gubici. U cenu nepouzdanositi nekog sistema ne uračunava se samo cena proizvodnje elementa koji je otkazao, nego se u obzir uzimaju i prateći efekti koji su nastali usled otkaza. Cena nepouzdanosti zavisi i od funkcije koju obavlja dati sistem. Na primer, otkaz tranzistora u radioprijemniku ne nosi iste troškove kao otkaz tranzistora u nekom vitalnom delu satelita. Osim toga, moraju se imati u vidu i troškovi održavanja koji

Uvod
3
podrazumevaju gubitak vremena za lociranje i opravku kvara, zatim cena rezervnog dela, troškovi održavanja tog dela na skladištu, transporta itd.
Snažan podsticaj razvoju pouzdanosti dali su i daju vojna industrija, kosmička istaživanja, primena nuklearne energije u mirnodopske svrhe, vazduhoplovna industrija, sistemi saobraćaja i veza, oštra konkurencija na tržištu i mnogi drugi faktori.
Početak brzog razvoja pouzdanosti kao naučne discipline vezuje se za 30-te godine ovog veka, kada je počeo i nagli razvoj vazduhoplovne industrije.
Iskustva stečena u drugom svetskom ratu, a kasnije i u lokalnim ratovim u Koreji, Vijetnamu, na Bliskom istoku i sl. bila su dragocena za kasnije svestrane analize pouzdanosti elemenata i sistema i akcije u cilju povećanja pouzdanosti.
Sledećih nekoliko primera, zasnovnih na stvarnim praćenjima rada sistema ilustruju ogromne koristi ostvarene sagledavanjem značaja organizovnog, planskog i detaljnog praćenja pouzdanosti:
• U 1958. godini amerikanci su lansirali uspešno samo 28% satelita, dok je sada ta cifra 92% i ima stalnu tendenciju porasta;
• U 1959. godini, period garancije za automobil iznosio je 90 dana ili 6000 kilometara, dok danas neki proizvođači već nude garanciju od 5 godina ili 80.000 km;
• Hidraulična pumpa na avionu DC-8 prvobitno je imala vreme između remonta 1200 h. Kontinualnim prikupljanjem podataka o otkazima, omogućene su konstrukcijske izmene koje su povećale pouzdanost pumpe. Kao rezultat toga povećano je srednje vreme između remonta na 2 000 h, zatim 4000 h i najzad 5800 h. Znači, povećana pouzdanost rezultirala je smanjenjem troškova održavanja;
• Dobro postavljenim i vođenim programom, pouzdanost sistema naoružanja na avionu F-105 podignuta je sa 0,7263 na 0,8986. Troškovi pouzdanosti bili su visoki –25,5 miliona dolara, ali su zato i uštede bile ogromne -54 miliona dolara godišnje u troškovima održavanja.
U mnogim bogatijim zemljama sveta formirane su agencije i Komiteti za praćenje i analizu pouzdanosti elektronskih komponenata i sistema. Oni su propisivali specifikacije sa preciznim zahtevima po pitanju pouzdanosti koje proizvođač mora da zadovolji. U sadašnjim specifikacijama zahteva se da proizvođač bude u stanju da demonstrira postignutu pouzdanost. Danas ne samo vojna tehnika, već i druge oblasti primene tehnike nameću konkretne zahteve razvoju pouzdanosti, što je uslovljeno sve širom primenom složenih uređaja i sistema.
Na kraju ovog uvodnog dela korisno je dati definicije nekih pojmova koji se koriste u teoriji pouzdanosti.
Proizvod – je širok pojam pod kojim se mogu podrazumevati: sistem, uređaj, sklop ili komponenata.
Komponenta - osnovna jedinica ili deo koji se ne može rastaviti na manje delove bez njenog uništenja.
Sklop – je samostalna celina, koja se sastoji od više komponenata, a koja ima specifičnu funkciju.
Uređaj – predstavlja kompletnu jedinicu za upotrebu, a sastoji se od izvesnog broja sklopova smeštenih u jednom zajedničkom okviru.

Uvod
4
Sistem – je tehnička organizaciona celina. odnosno integrisana grupa uređaja, za samostalno izvršenje neke grupe zadataka.

Pokazatelji pouzdanosti
5
2. POKAZATELJI POUZDANOSTI
2.1. Određivanje pokazatelja pouzdanosti
Sa problemom kvantitativnog izražavanja pouzdanosti povezan je pojam pokazatelja pouzdanosti. Pod ovim pojmom podrazumeva se kvantitativna karakteristika nekog od svojstava koje određuje pouzdanost.
Do kvantitativnih podataka o pouzdanosti može se uglavnom doći na sledeća tri načina: proračunom, laboratorijski i u toku eksploatacije.
Prvi način je posebno interesantan za uređaje ili sisteme. Postupak se sastoji u utvrđivanju stepena pouzdanosti na osnovu poznavanja pouzdanosti komponenata ili blokova, kola uređaja i predviđenih režima rada. Tako utvrđena pouzdanost je proračunata pouzdanost. Od značaja je pri razvijanju novih tipova uređaja i sistema, kada se u fazi projektovanja uzima u obzir potrebna pouzdanost kao jedan od zahteva koji treba da ispuni projektovani uređaj.
Drugi način dobijanja podataka o pouzdanosti je laboratorijski. Postoje razne normalne i ubrzane statičke i dinamičke metode utvrđivanja pouzdanosti u laboratorijskim uslovima. Ispitivanja se vrše bilo u normalnim bilo u posebnim režimima rada.
Najzad, najprirodniji način dobijanja podataka o pouzdanosti je na osnovu eksploatacije. Specifičan problem koji se pri tome javlja je organizacija dobijanja informacija i verodostojnost dobijenih informacija.
S obzirom na to kako je podatak o pouzdanosti formiran, govori se o utvrđenoj, ocenjenoj, ekstrapoliranoj, prognoziranoj i stvarnoj pouzdanosti. Bilo kojoj karakteristici pouzdanosti daje se jedna od ovih verzija. Verzija “utvrđen” odnosi se na podatke dobijene na osnovu ispitivanja u kojem svi ispitni uzorci nisu prestali da rade. Verzija “ocenjen” odnosi se na podatke koji su određeni sa odgovarajućim nivoom verodostojnosti i predstavljaju graničnu vrednost intervala verodostojnosti. Verzija “ekstrapoliran” odnosi se na podatke o pouzdanosti u datim uslovima rada koji su definisani ekstrapolacijom ili interpolacijom utvrđenih ili ocenjenih podataka o pouzdanosti u drugim uslovima rada. Verzija “prognoziran” odnosi se na podatke proračunate na osnovu utvrđene, ocenjene ili ekstrapolirane pouzdanosti. Verzija “stvarna” odnosi se na podatak dobijen na osnovu ispitivanja u toku kojeg su svi uzorci prestali da rade.
Matematička predstava pokazatelja pouzdanosti je povezana sa teorijom verovatnoće i matematičkom statistikom. Pri praktičnom određivanja pokazatelja pouzdanosti važno je da u partiji komponenata, na osnovu kojih se izvode zaključci o pouzdanosti komponente, uzroci otkaza svake komponente budu isti. Ovakva partija komponenata je statistički homogena. Praktično je moguće realizovati statistički homogenu partiju. Homogenu partiju predstavljaju uređaji proizvedeni na istoj proizvodnoj traci od komponenata koje su proizvodili isti proizvođači.
Izbor pokazatelja zavisi, u osnovi, od opšte namene sistema, ali na njega može takođe uticati i značaj funkcija, koje izvršava sistem. Pri izboru pokazatelja pouzdanosti tehničkog sistema, treba imati u vidu neke očigledne preporuke:
• Broj pokazatelja pouzdanosti treba da bude što je moguće manji;

Pokazatelji pouzdanosti
6
• Treba izbegavati složene kompleksne pokazatelje, koji se dobijaju u obliku nekih grupa kriterijuma;
• Izabrani pokazatelji pouzdanosti moraju obezbediti mogućnost provere u etapi projektovanja;
• Izabrani pokazatelji pouzdanosti moraju imati prost fizički smisao;
• Izabrani pokazatelji pouzdanosti moraju omogućiti statističku (eksperimentalnu) procenu pri specijalnim ispitivanjima ili po rezultatima eksploatacije;
• Izabrani pokazatelji pouzdanosti moraju omogućiti zadavanje pouzdanosti u kvantitativnom obliku.
Treba imati na umu da podatak o pouzdanosti komponente nije dobijen matematiziranjem već ga svi veliki proizvođači daju kao tehnički podatak se ne dobija na bazi obrade mnoštva eksperimentalnih podataka i to kao funkciju mnogih faktora kao što su mehanička i termička opterećenja, uticaj okoline, uslovi upotrebe, klasa kvaliteta komponenata itd. Prema tome, prognoza pouzdanosti sistema je matematička metoda bazirana na eksperimentalno utvrđenim podacima o pouzdanosti komponenata. U zavisnosti od postavljenog cilja i od faze i razvoja, prognoza pouzdanosti se može izvesti sledećim trima metodama:
• metod sličnosti opreme
• metod nabrajanja komponenata
• metod opterećenja
Metod sličnosti opeme se upotrebljava u fazi stvaranja koncepcija uređaja i daje ocenu parametara pouzdanosti koja se može koristiti kod ugovaranja i postavljanja tehničkih zahteva. Kako u ovoj fazi procene sadržaja uređaja postoji samo specifikacija funkcija, a ne stepena koji stvaraju tu funkciju, ocena pouzdanosti se zasniva na podacima o pouzdanosti sličnih sklopova na sličnim funkcijama. Naravno da je za ovakvu vrstu prognoze pouzdanosti potrebana datoteka podataka koja će poslužiti prilikom okvirnog definisanja uređaja, kad još stepeni nisu konstruisani, ali se zna koje funkcije uređaj mora da zadovolji. Ova procena mora biti vrlo pažljivo izvedena i to sa više alternativa i sa određenom rezervom, jer postaje predmet tehničkog zahteva koji se u fazi konstrukcije mora i ispuniti.
Metoda prognoze pouzdanosti pomoću nabrajanja komponenata (elemenata) koristi konstruktoru za komparaciju između stepena sa identičnim funkcijama, ali različito izvedenim.
Međutim, ova tehnika prognoziranja ne daje informacije da li su pojedine komponente preopterećene, jer se metoda proračuna zasniva na prosečnim intenzitetima otkaza za odgovarajuću klasu i tip komponente. To znači da ova metoda služi konstruktoru kao orjentacija prilikom optimiziranja i kao informacija koji kvalitet, koliko elemenata i kakvu konfiguraciju sme maksimalno da koristi za svoju konstrukciju i da ostane unutar okvira zahtevane pouzdanosti stepena.
Metoda opterećenja se koristi kao nastavak metode nabrajanja komponenata i to vezana za konkretni proračun opterećenja pojedinih komponenata. Prvenstvena svrha ove metode je da se otkriju preopterećene i ugrožene komponente, što omogućava da se već u fazi konstrukcije za takve slučajeve nađu druga rešenja, a ujedno da se realnije proceni sada već poznat specifičan uticaj okoline i radnih uslova, a u skladu sa električnim i termičkim naprezanjem sklopa, odnosno svake komponente pojedinačno.

Pokazatelji pouzdanosti
7
2.2. Funkcije raspodele otkaza, pouzdanosti i gustine otkaza
Ako je T slučajna promenljiva veličina koja označava vreme pojave otkaza onda će verovatnoća otkaza u funkciji vremena biti:
0),()( ≥=≤ ttFtTP (2.1)
Funkcija F(t) zove se funkcija raspodele otkaza i ona pokazuje verovatnoću da će sistem otkazati do vremena t. U teoriji verovatnoće ova funkcija se zove kumulativna funkcija raspodele. Ako se pouzdanost sistema označi kao verovatnoća bezotkaznog rada u vremenskom intervalu t, može se pisati:
)()(1)( tTPtFtR >=−= (2.2)
gde R(t) označava funkciju pouzdanosti.
Funkciju gustine otkaza se obeležava sa f(t), a na osnovu osnovnih zakona iz teorije verovatnoće može se napisati da je:
dttdFtf )()( = (2.3)
Prema teoriji verovatnoće ova funkcija se zove funkcija gustine verovatnoće. Na osnovu gornjih definicija može se napisati izraz za funkciju pouzdanosti:
∫ ∫∞
=−=−=t
t
dttfdttftFtR0
)()(1)(1)( (2.4)
Dakle dovoljno je znati oblik funkcije f(t) pa da se dobije funkcija pouzdanosti R(t).
2.3. Funkcija intenziteta otkaza
Pretpostavlja se da se istovremeno ispituje n sistema. Posle određenog vremena t, n1 sistema nisu otkazali, a n2 sistema su otkazali pri čemu je n2 = n − n1. Prema ovome i na osnovu do sada rečenog o pouzdanosti, R(t) se može izraziti kao:
)()()()()(
21
11
tntntn
ntntR
+== (2.5)
Znači da ova jednačina pokazuje verovatnoću bezotkaznog rada bilo kog od n sistema u toku vremena t, jer je ona kao što je rečeno funkcija vremena. Po logici stvari, jasno je da kako t
Pokazatelji pouzdanosti
8
raste, sve više i više sistema otkazuje što znači da će pouzdanost opadati. Prethodna jednačina se može napisati u sledećem obliku:
ntn
ntnntR )(1)()( 22 −=
−= (2.6)
Leva i desna strana gornje jednačine se mogu diferencirati pa se dobija sledeće:
dt
tdnndt
ntnd
dttdR )(1
)(1)( 2
2
−=⎥⎦⎤
⎢⎣⎡ −
= (2.7)
gde je n konstantno. Na osnovu ovog se dobija izraz za frekvenciju sa kojom sistem otkazuje:
dttdRn
dttdn )()(2 −= (2.8)
Sada je moguće obe strane gornje jednačine podeliti sa n1(t):
dttdR
tnn
dttdn
tn)(
)()(
)(1
1
2
1
−= (2.9)
Iz gornje jednačine se može definisati funkcija intenziteta otkaza λ(t):
dttdR
tRdttdn
tnt )(
)(1)(
)(1)( 2
1
−==λ (2.10)
Odavde se može dobiti opšta formula za funkciju pouzdanosti R(t). Može se napisati da je:
dttdt
tdR )()( λ−= (2.11)
odnosno:
∫∫ −=tR
dtttRtdR
01
)()()( λ (2.12)
odnosno:
∫−=t
dtttR0
)()(ln λ (2.13)
Pokazatelji pouzdanosti
9
i konačno:
∫=
−t
dtt
etR 0
)(
)(λ
(2.14)
Formula (2.14) matematički opisuje pouzdanost na najopštiji način i može se primeniti za bilo koju funkciju gustine otkaza. Iz jednačine (2.2) može se napisati da je:
)(1)( tRtF −= (2.15)
pa se zamenom u jednačini (2.3) dobija:
dttdRtf )()( −= (2.16)
Imajući u vidu izraz (2.16), funkcija intenziteta otkaza kako je definisano izrazom (2.10) može se napisati i u sledećem obliku:
)()()(
tRtft =λ (2.17)
Značaj ove funkcije je u tome što pokazuje kako se u toku vremena menja intenzitet otkaza nekog sistema.
2.4. Očekivano vreme bezotkaznog rada
Očekivano vreme bezotkaznog rada definiše se na osnovu sledeće jednačine:
∫∞
⋅=0
)( dttftTSR (2.18)
Izraz za TSR može se dobiti i u drugom obliku. Ako se jednačina (2.16) zameni u jednačinu (2.18) dobija se sledeće:
∫∫∞
∞∞
+−=⋅−=0
00
)()()( dttRttRtRdtTSR (2.19)
Jasno je da prvi deo zbira teži nuli za obe granice na osnovu definicije R(t) preko λ(t) jer je u pitanju eksponencijalna funkcija a xe-x kada x teži ∞ teži nuli. Na osnovu ovoga, drugi oblik za očekivano vreme bezotkaznog rada sistema je dat sledećim izrazom:

Pokazatelji pouzdanosti
10
∫∞
=0
)( dttRTSR (2.20)
Ako se sistem koji se ispituje obnavlja održavanjem ili popravkama, tj. u slučaju takozvanih popravljivih sistema, očekivano vreme bezotkaznog rada je poznato pod nazivom srednje vreme između otkaza (MTBF – Mean Time Between Failure). Pri tome je jasno da se polazi od pretpostavke da je ponašanje popravljenog sistema u pogledu intenziteta otkaza isto kao kod novog sistema. Kod takozvanih nepopravljivih sistema govori se o srednjem vremenu do prvog otkaza, ili jednostavno o srednjem vremenu do otkaza (MTTF– Mean Time To Failure). Veličine MTBF tj. MTTF treba uvek koristiti kada je specificirana funkcija gustine otkaza, jer nivo pouzdanosti koji se može pripisati određenoj vrednosti MTBF tj. MTTF zavisi od oblika te funkcije. Ako se posmatra n sistema koji se ispituju, pri čemu se beleže vremena rada između otkaza t1, t2, ... ,tn onda će MTBF biti:
∑=
=n
iitn
MTBF1
1 (2.21)
2.5. Funkcija intenziteta otkaza i vek trajanja sistema
U početku korišćenja nekog sistema obično se javlja veći broj otkaza koji se mogu pripisati početnim slabostima ili propuštenim defektima u toku proizvodnje. Kasnije, ovi takozvani rani otkazi ustupaju mesto otkazima za koje je teško utvrditi uzrok nastajanja. To su takozvani slučajni otkazi čije se vreme pojavljivanja ne može predvideti ali zato se zna frekvencija pojavljivanja otkaza. Starenjem sistema počinju da se javljaju otkazi usled istrošenosti. Na sledećoj slici 2.1.a su prikazani periodi promene λ(t) za sva tri intervala, a na slici 2.1.b oblici funkcije gustine raspodele otkaza f(t).

Pokazatelji pouzdanosti
11
t
tt2
t1
λ(t)
f(t)
a)
b)
Slika 2.1 Opšti oblik funkcija λ(t) i f(t)
U periodu ranih otkaza (0 do t1) λ(t) i f(t) su opadajuće funkcije. Za karakteristiku slučajnih otkaza (t1 do t2) približno je konstantna vrednost λ(t) i približno eksponencijalna funkcija f(t). U periodu starenja (t2 do ∞) λ(t) je rastuća funkcija, dok f(t) ima jedan vrh oko koga se dešava najveći broj otkaza. Iz ovog razmatranja može se videti da je funkcija λ(t) pogodnija od f(t) kada se želi napraviti razlika između raznih oblika otkaza.
Iskustvo je pokazalo da mnogi sistemi imaju krivu intenziteta otkaza kako je već pokazano na slici 2.1.a. Mnogi proizvođači opreme visoke pouzdanosti puštaju tu opremu da radi kako bi je doveli na početak intervala konstantnih otkaza. Tek onda je ugrađuju u neki sistem.
Na žalost, mnogi sistemi imaju kontinualno opadajuću i kontinualno rastuću funkciju intenziteta otkaza, pa se na njih ne može primeniti oblik krive λ(t) sa slike 2.1.a.

Otkazi elemenata i sistema
12
3. OTKAZI ELEMENATA I SISTEMA
Pod otkazom u smislu pouzdanosti podrzumeva se prestanak sposobnosti uređaja da vrši zahtevanu funkciju. U toku eksploatacije uređaji i sistemi i njihovi sastavni delovi (elementi) mogu se naći u jednom od dva moguća stanja: ispravnom ili neispravnom. U ispravnom stnju sistema (elemenata) njegove karakteristike zadovoljavaju propisane zahteve, kako radne, tako i sporedne kao što su izgled, pogodnost za eksploataciju i sl. Svako odstupanje od propisanih radnih zahteva može se smatrati otkazom ili neispravnošću.
Otkaz je događaj koji dovodi do prelaza iz isprvnog stanja (stanja radne sposobnosti) u neisprano stanje. Dakle, otkaz predstavlja potpuni ili delimični gubitak radne sposobnosti sistema.
Kod sistema se mogu sresti i tzv. drugostepene neispravnosti – defekti, koje ne narušavaju njihov ispravan rad i sistemi se mogu koristiti i posle te vrste neispravnosti bez bojazni za ispravno obavljanje zadataka. Takve neispravnosti su, na primer, greška na uzemljenju (pri čemu uređaj i dalje radi) ili, pregrevanje signalnih sijalica i sl.
Osim toga, moguće je govoriti o relevantnim i irelevantnim otkazima (tj. oni koji se uzimaju odnosno ne uzimaju u proračunu). Pod relevantnim se podrazumevaju greške u aplikaciji, greške konstrukcije, greške izrade kao i promena karakteristika izvan onih utvrđenih specifikacijom. Pod irelevantnim otkazima podrazumevaju se grške instaliranja i postavljanja, grške rukovanja, sva slučajna oštećenja kao i greške izazvane nepravilnom primnom opremem za ispitivanje.
Pod dejstvom različitih faktora, u toku eksploatacije elemenata (sistema) menja se velična nekog od parametara elemenata ( )nxxxx ,.....,, 21 u toku vremena u okviru dopuštenih granica a i b. Pod parametrom se podrazumeva bilo koja karakteristika elemenata (sistema). U toku te promene parametar 1x dostiže jednu od granica a ili b, a izlazak izvan okvira dopuštenih granica kvalifikauje se kao otkaz. Na taj način, pod otkazom se podrazumeva događaj koji se dešava u trenutku kada je vrednost parametra 1x dostigla jednu od granica ili je izašla izvan njih.
Međutim promena parametra 1x van odrđenih granica ne mora uvek označavati i gubljenje radne sposobnosti elemenata. Na primer, kod radioprijemnika, može se desiti da mu osetljivost bude manja od dozvoljene granice koja je odrđena tehničkim uslovima. To se smatra otkazom, bez obzira što prijemni može i dalje da radi. Zbog toga je nužno da se za svaki sistem unapred formulišu obeležja stanja radne sposobnosti i neispravnog stanja, zavisno od namene sistema, uslova eksploatacije, zahteva prema kvalitetu funkcionisanja it., i da ona budu usklađena između naručioca i proizvođača.

Otkazi elemenata i sistema
13
x b 1 2 2 a t1 t2 t3 t
Slika 3.1 Grafičko predstavljanje iznenadnog (1) i postepenog (2) otkaza
Da bi se lakše analizirli, otkazi se klasifikuju. Kriterijuma klasifikacije ima više, pa je u
tabeli 3.1 dat pregled vrsta otkaza prema raznim kriterijumima klasifikacije. Jedan otkaz mođe odgovarati raznim kriterijumima pa će na taj način biti razvrstan u više vrsta.
1. Neočekivani (iznenadni) otkaz
Otkaz koji je nastao kao rezulatat nagle promene jednog ili više parametara elemenata
zove se neočekivani otkaz. Javlja se usled nagomilavanja neispravnosti i oštećenja. Naziv potiče otuda što obično izostaju vidni znaci njihovog približavanja, tj. pre nastupanja takvog otkaza obično se ispoljavaju kvntitativne promene karakteristika elemenata. Uzorci neočekivanog otkaz u većini slučajeva su skriveni defekti materijala i delova elemenata, ali i nepravilna upotreba elemenata. Ovi otkazi se obično ispoljavaju u mehaničkim i elektičnim oštečenjima elemenata (lomovi, pukotine, prekidi, proboji izolacije itd.), zbog čega se često zovu i grubi otkazi. Ovaj otkaz je konačan i dovodi komponentu do potpunog gubljenja radne sposobnost.
2. Postepeni otkaz
On se karakteriše postepenom izmenom jednog ili više parametara elemenata. Postepeni
otkazi se javljaju kao posledica istrošenosti materijala, starenja materijala, promena napona napajanja itd. Karakteristično je da se promena parametra x može registrovati pomoću mernih instrimenata. Parametri proizvoda mogu u toku rada dostići kritične vrednosti, pri kojim je stanje nezadovoljavajuće, tj. dolazi do njegovog otkaza. Pošto trenutak u kome parametar x napušta svoje granice nije tačno određen, teško je ustanoviti da li je otkaz nastao usled neočekivane ili postepene promene. U tom smislu, podela na neočekivane i postepene otkaze je uslovna i među njima nema principijelne razlike. Neočekivani otkazi, u velikom broju slučajeva, nastaju kao rezultat postepene ali skrivene promene paramera x. Na primer, lomljenje elemenata će se klasificirati kao neočekivani otkaz, i ako je do toga došlo usled postepenog habanja. Sa druge strane, postepeni otkaz može biti posledica nagomilavanja malih promena, koje izazivaju neočekivane otkaze u elementima

Otkazi elemenata i sistema
14
Tabela 3.1 Podela otkaza po raznim kriterijumima klasifikacije
KRITERIJUM KLASIFIKACIJE VRSTA OTKAZA
Neočekivani (iznenadni ) otkaz Vrsta izmene stanja
Postepeni (degradacioni) otkaz
Nezavisni otkaz Veza sa drugim otkazima
Zavisni otkaz
Potpuni otkaz Mogućnost korišćenja posle otkaza Delimični otkaz
Permanentni otkaz Prolazni otkaz
Peroda eliminisanja
Otkaza
Otkaz koji se sam otklanja Povratni otkaz
Očigledan otkaz Spoljna manifestacija
Prikriven otkaz
Konstrukcioni otkaz (greška konstruktora, nesavršen metod konstrukcije)
Tehnološki otkaz (greška pri proizvodnji, nesavršena tehnologija)
Uzrok nastajanja Otkaza
Eksploatacioni otkaz (greška u eksploataciji, nepredviđeni spoljašnji uslovi)
Prirodni otkaz
Prirode nastajanja Otkaza
Veštački otkaz
Otkazi pri ispitivanju
Otkazi u periodu priprema
Otkazi pri normalnoj eksploataciji
Vreme nastajanja
Otkaza
Otkazi pri kraju perioda eksploatacije
Slučajni otkaz Po intenzitetu otkaza
Sistematski otkaz
Otkazi elemenata i sistema
15
drugorazrednog značaja za rad sistema. Sa metodama koje se danas primnjuju za merenje parametra x, nije moguće, dok se elemenat nalazi u ispranom stanju, uočiti takva odstupanja parametra x koja bi blagovremeno ukazivala na bliskost grnice ispravnog stanja.
3. Zavisni i nezavisni otkaz
Otkazi su slučajni događaji, koji mogu biti zuavisni i nezavisni. Otkaz je zavisan, ako se pri pojavi jednog orkaza menja verovatnoća pojavljivanja drugog otkaza. Kod nezavisnih otkaza verovtnoća pojavljivanja jednog otkaza ne zavisi od činjenice da li su se desili drugi otkazi ili ne.
Nezavisan je otkaz elementa, koji nije uslovnljen kvarovima i otkazima drugih lemanata sistema. Najčešće nastaje u jednom elementu.
Zavisan otkaz je otkaz elementa, koji je uslovljen kvarovima i otkazima drugih elemenata.
4. Potpun i delimičan otkaz
Po osnovu kriterijuma mogućnosti korišćenja posle nastajanja otkaza, otkazi se dele na
potpune i delimiočne. Otkaz, posle čijeg se nastanka sistem ne može koristiti do popravke je potpuni otkaz. Mnogi elementi se posle potpunog otkaza ne mogu opraviti (proboj kondenzatora, pregrevanje žičanog otpornika i sl.).
Posle nastajanja delimičnog otkaza, postoji mogućnost delimičnog korišćenja elementa. On ima za posledicu samo pogoršanje neke karakteristike sistema.
5. Permanentni otkaz i otkaz koji se sam otklanja
Po prirodi eleiminisanja otkaza razlikuju se permanentne otkazi i otkazi koji se sami
otklanjaju.
Pri permanentnim otkazima radi uspostavljanja radne sposobnosti elementa neophodno je izvršiti njegovu opravku (regulisanje). Na primer, otkaz rada televizora usled pregrevanja žičnog otpornika.
Otkaz koji se sam otklanja i čije je trajanje malo u poređenju sa vremenom roka do sledećeg otkaza je prolazni otkaz. Na primer, ako u kondenzatou sa metalizovanom hartijom dođe do neželjenog spoja, pri uključenju napona metalni sloj u neposrednoj blizini provodnog spoja ispari i kondezator se regeneriše.
Ukoliko se prolazni otkazi pojavljuju u nizu, jedan za drugim, onda su to povratni otkazi. Otkazi takvog tipa se mogu pojaviti u elektronskim impulsnim sistemima i radio uređajima pri delovnju raznih vrsta smetnji.
6. Slučajni otkazi
Otkazi kod kojih je intenzitet otkaza konstantan zovu se slučajni otkazi. Tada su otkazi
uslovnljeni mnogim statističkim uticajima koji potiču od međusobno nezavsnih faktora.
7. Sistematski otkazi
Otkazi elemenata i sistema
16
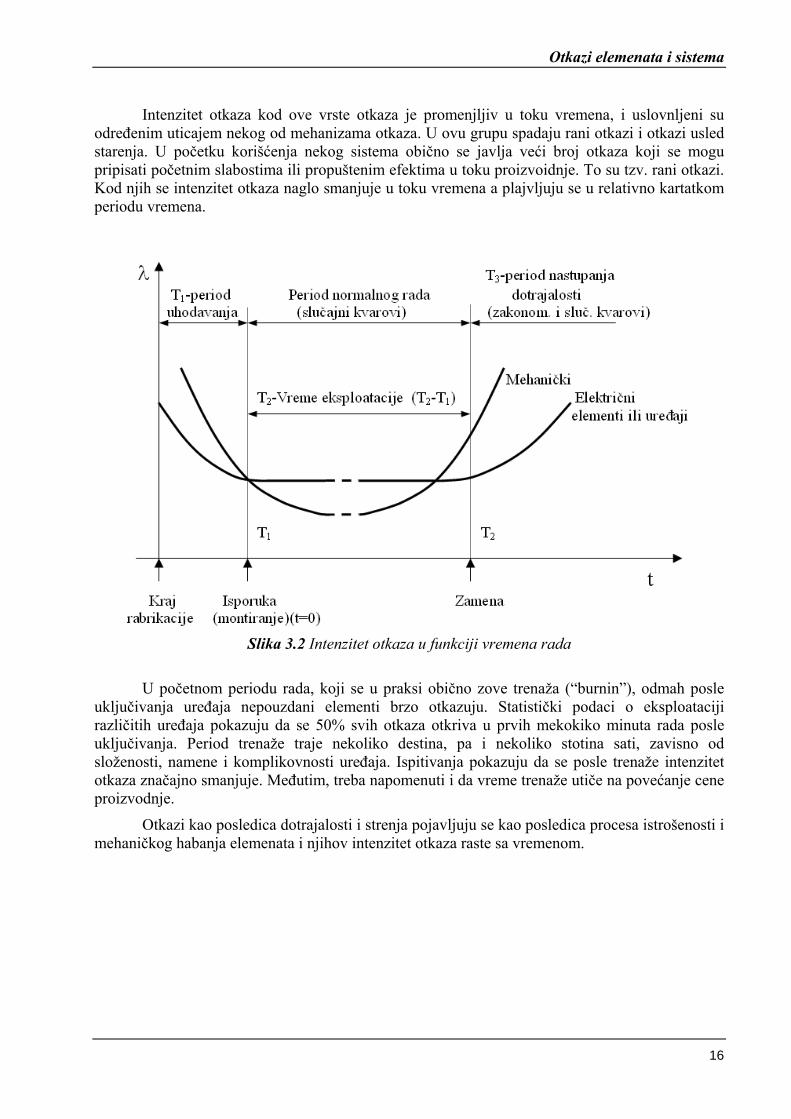
Intenzitet otkaza kod ove vrste otkaza je promenjljiv u toku vremena, i uslovnljeni su određenim uticajem nekog od mehanizama otkaza. U ovu grupu spadaju rani otkazi i otkazi usled starenja. U početku korišćenja nekog sistema obično se javlja veći broj otkaza koji se mogu pripisati početnim slabostima ili propuštenim efektima u toku proizvoidnje. To su tzv. rani otkazi. Kod njih se intenzitet otkaza naglo smanjuje u toku vremena a plajvljuju se u relativno kartatkom periodu vremena.
Slika 3.2 Intenzitet otkaza u funkciji vremena rada
U početnom periodu rada, koji se u praksi obično zove trenaža (“burnin”), odmah posle
uključivanja uređaja nepouzdani elementi brzo otkazuju. Statistički podaci o eksploataciji različitih uređaja pokazuju da se 50% svih otkaza otkriva u prvih mekokiko minuta rada posle uključivanja. Period trenaže traje nekoliko destina, pa i nekoliko stotina sati, zavisno od složenosti, namene i komplikovnosti uređaja. Ispitivanja pokazuju da se posle trenaže intenzitet otkaza značajno smanjuje. Međutim, treba napomenuti i da vreme trenaže utiče na povećanje cene proizvodnje.
Otkazi kao posledica dotrajalosti i strenja pojavljuju se kao posledica procesa istrošenosti i mehaničkog habanja elemenata i njihov intenzitet otkaza raste sa vremenom.

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
17
4. NEKI ZAKONI RASPODELE SLUČAJNIH VELIČINA KOJE SE KORISTE U TEORIJI POUZDANOSTI
4.1. Slučajni događaj. Verovatnoća događaja. Slučajne veličine i zakoni njihove raspodele
Osnovni pojam u teoriji verovatnoće je pojam događaja. Pod pojmom događaj u nekom eksperimentu podrazumeva se svaka činjenica koja može da proizađe ili ne iz tog eksperimenta. Karakteristično za događaje raznih vrsta je da oni imaju neku meru (stepen) mogućnosti da se ostvare. Da bi se omogućilo da se događaji upoređuju po stepenu mogućnosti da se ostvare, neophodno je da se sa događajem poveže određeni broj, koji je utoliko veći, ukoliko je veća mogućnost ostvarenja tog događaja. Za poređenje raznih događaja po verovatnoći, usvojena je jedinica merenja: verovatnoća izvesnog događaja, tj. događaja koji će sigurno proizići. Za verovatnoću takvog događaja usvojen je broj 1, a svi ostali događaji koji su mogući, ali ne i izvesni, imaju verovatnoću manju od 1. Događaju koji u datom eksperimentu uopšte ne može da se ostvari, pridodeljena je verovatnoća jednaka nuli, što je sasvim prirodno u odnosu na verovatnoću izvesnog događaja.
Izračunavanje verovatnoće slučajnog događaja bazira se na zakonu velikih brojeva, prema kome se, pri neograničenom povećavanju broja opita, može tvrditi sa praktičnom sigurnošću da se učestalost događaja malo razlikuje od njegove verovatnoće pojavljivanja u jednom opitu. Učestalost događaja (ili statistička verovatnoća) definisana je na osnovu rezultata opita i izračunava se iz izraza:
nmPS =
gde je m - broj pojavljivanja događaja A, n - ukupan broj izvršenih opita.
Ne određuje se verovatnoća svakog događaja preko rezultata opita. U teoriji verovatnoće postoje mnoge metode za posredno određivanje verovatnoće jednih događaja preko verovatnoće drugih, ali i u takvom postupku u krajnoj liniji se dolazi do korišćenja rezultata opita.
Pored osnovnog pojma događaj, u teoriji verovatnoće jedan od najvažnijih osnovnih pojmova je pojam slučajne veličine.
Slučajna veličina je veličina, koja kao rezultat opita može da dobije neku vrednost koja se unapred ne može predvideti.
Slučajne veličine, koje mogu da dobiju vrednost iz prebrojivog skupa vrednosti nazivaju se prekidnim ili diskretnim slučajnim veličinama.
Postoji i druga vrsta slučajne veličine, tzv. neprekidna slučajna veličina, koja može da dobije vrednost iz skupa vrednosti koje neprekidno popunjavaju neki odsečak.
U klasičnoj teoriji verovatnoće operisalo se sa događajima, dok se u savremenoj radi sa slučajnim veličinama, što je u rešavanju mnogobrojnih zadataka iz prakse pogodnije. Najčešće se

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
18
izračunavanje verovatnoće nekog događaja vezuje za neku slučajnu veličinu ili sistem slučajnih veličina, na osnovu čijih osobina se izražava i verovatnoća slučajnog događaja.
U teoriji pouzdanosti izvode se operacije sa slučajnim veličinama da bi se dobili pokazatelji pouzdanosti.
4.1.1. Funkcija raspodele. Niz raspodele
Da bi se moglo operisati sa slučajnim veličinama, daju se načini, pomoću kojih se slučajna veličina može opisati i okarakterisati.
Slučajna veličina X (prekidna i neprekidna) potpuno je okarakterisana, s tačke gledišta verovatnoće, funkcijom raspodele, koja izražava verovatnoću događaja da se ostvari nejednakost
X < x
gde je x - tekuća promenljiva.
Verovatnoća P ovoga događaja je funkcija promenljive x i označava se sa F(x).
F(x) = P(X < x)
Funkcija raspodele F(x) naziva se često još i integralnom funkcijom raspodele ili integralnim zakonom raspodele.
Za diskretne slučajne veličine postoji još jedan specijalni oblik zakona raspodele, koji daje vezu između mogućih vrednosti slučajne veličine i odgovarajućih verovatnoća. Forma zadavanja zakona raspodele diskretne slučajne veličine može da bude dvojaka:
• u vidu tablice u kojoj su date vrednosti slučajne veličine i odgovarajuće verovatnoće (niz raspodele slučajne veličine X),
• mnogougaonik raspodele, koji predstavlja grafički prikaz zakona raspodele, gde se na osi apscise predstavljaju moguće vrednosti slučajne promenljive(xi) a na ordinati odgovarajuće verovatnoće.
Za neprekidne slučajne promenljive oblik zakona raspodele, kao što je niz raspodele, ne postoji. Međutim funkcija raspodele F(x) je univerzalna i potpuna karakteristika svih slučajnih veličina (prekidnih i neprekidnih).
Opšte osobine funkcije raspodele su sledeće:
1. F(x) je neopadajuća funkcija argumenta x, F(x2) > F(x1), ako je x2 > x1;
2. F(−∞) = 0
3. F(+∞) = 1
Ako se zna niz raspodele diskretne slučajne promenljive, lako se može formirati funkcija raspodele:

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
19
∑<
==<=xx
ii
xXPxXPxF )()()(
gde nejednakost u znaku sume označava da se sumiranje verovatnoća odnosi na sve vrednosti xi koje su manje od x. Na taj način se uvek može formirati funkcija raspodele za prekidnu slučajnu veličinu.
U vezi izučavanja slučajnih promenljivih u praksi se često javlja problem da se izračuna verovatnoća da slučajna veličina X uzme neku vrednost iz zadatog intervala [a, b]. Problem se svodi na određivanje verovatnoće P sledećeg događaja:
a ≤ X < b
Verovatnoća toga događaja može se izraziti preko funkcije raspodele slučajne veličine X. Da bi se to učinilo, treba posmatrati tri sledeća događaja:
• događaj A: X < b
• događaj B: X < a
• događaj C: a ≤ X < b
Događaj A će proizaći ako se dogodi bilo događaj B bilo događaj C, odakle, prema osnovnim pravilima algebre slučajnih događaja, sledi:
A = B + C
odnosno:
P(A) = P(B) + P(C)
ili
P(X < b) = P(X < a) + P(a ≤ X < b) (4.1)
Kako je:
P(X < b) = F(b)
i
P(X < a) = F(a)
iz relacije (4.1) sledi:
F(b) = F(a) + P( a ≤ X < b)

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
20
odnosno:
P(a ≤ X < b) = F(b) − F(a) (4.2)
Na osnovu relacije (4.2) može se odrediti i verovatnoća da će slučajna veličina X dobiti jednu određenu vrednost, odnosno da će pasti na određeni beskonačno mali interval. Ako se u relaciji (4.2) uzme granična vrednost b → a, dobija se:
))()((lim)(lim aFbFbXaPabab
−=<≤→→
(4.3)
Granična vrednost izraza (4.3) zavisi od prirode funkcije raspodele, odnosno da li je F(x) neprekidna funkcija ili ima skokove. Ako je F(x) u tački x = a neprekidna, tada je ta granična vrednost jednaka nuli. Drugim rečima, ako je funkcija raspodele F(x) svugde neprekidna, tada je verovatnoća bilo koje izdvojene vrednosti slučajne veličine jednaka nuli.
4.1.2. Gustina raspodele
Ako je funkcija raspodele F(x) slučajne veličine X neprekidna i diferencijabilna, može se izračunati verovatnoća da će ta slučajna veličina uzeti neku vrednost iz intervala [ x, x + Δx].
P(x < X < x + Δx) = F(x + Δx) − F(x) (4.4)
Verovatnoća po izrazu (4.4) predstavlja priraštaj funkcije raspodele u tom intervalu. Odnos ove verovatnoće prema dužini intervala u graničnom prelazu kada Δx → 0 predstavlja izvod funkcije raspodele:
)(')()(lim0
xFx
xFxxFx
=Δ
−Δ+→Δ
(4.5)
Izvod funkcije raspodele koji se označava sa f(x) = F’(x) je karakteristika u izvesnom smislu gustine sa kojom su raspodeljene vrednosti slučajne veličine u tački x. Zbog toga se ta funkcija naziva gustinom raspodele neprekidne slučajne veličine. Za istu funkciju postoji još i naziv “diferencijalna funkcija raspodele” ili “diferencijalni zakon raspodele”.
Gustina raspodele f(x) je takođe jedan od oblika zakona raspodele slučajne promenljive, ali za razliku od funkcije raspodele F(x), taj oblik nije univerzalan, jer postoji samo za neprekidne slučajne promenljive.
Verovatnoća da će slučajna veličina X uzeti neku vrednost na elementarnom odsečku dx data je izrazom:
f(x) dx
Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
21
Verovatnoća da će veličina X pasti na odsečak [a, b] može se izraziti preko gustine raspodele:
∫=<<b
a
dxxfbXaP )()( (4.6)
Funkcija raspodele F(x) može se na osnovu relacije (4.6) izraziti preko gustine raspodele:
∫∞−
=<<−∞=<=x
dxxfxXPxXPxF )()()()( (4.7)
Osnovne osobine gustine raspodele slede iz osobina funkcije raspodele i prethodno navedenih relacija između ove dve funkcije:
1. Gustina raspodele je nenegativna funkcija
f(x) ≥ 0
što sledi iz osobine funkcije F(x) da je neopadajuća funkcija.
2. Osobina
∫∞
∞−
= 1)( dxxf
sledi iz relacije (4.7) i iz osobine F(∞) = 1.
Grafik koji predstavlja gustinu raspodele, naziva se krivom raspodele
4.1.3. Brojne karakteristike slučajnih veličina
Navedeni oblici zakona raspodele za diskretne i neprekidne slučajne veličine (funkcija raspodele, niz raspodele, gustina raspodele) predstavljaju neke funkcije koje potpuno opisuju slučajnu veličinu.
U mnogim slučajevima iz prakse nije neophodno da se slučajna veličina opiše u potpunosti, i da se određuju zakoni njene raspodele. Najčešće je dovoljno da se znaju neki brojni parametri, koji u određenom stepenu karakterišu suštinske osobine raspodele slučajne promenljive. Na primer, od interesa je brojni parametar koji pokazuje neku srednju vrednost oko koje se grupišu moguće vrednost slučajne promenljive; ili parametar koji pokazuje stepen razbacanosti vrednosti slučajne veličine u odnosu na srednju vrednost.
Ovakvi brojni parametri nazivaju se brojnim karakteristikama slučajne promenljive (parametri raspodele).

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
22
Brojne karakteristike slučajne promenljive imaju važnu ulogu u teoriji verovatnoće. Mnogi problemi se rešavaju samo operacijama sa brojnim karakteristikama, a da se o zakonima raspodele i ne vodi računa. Naročito je značajna osobina da, ukoliko se u nekoj pojavi javlja više slučajnih veličina, od kojih svaka ima izvesni uticaj na ishod pojave, tada zakon raspodele rezultujuće slučajne veličine ne zavisi od zakona raspodele pojedinih slučajnih veličina, tako da nije potrebno da se znaju zakoni raspodele pojedinačnih slučajnih veličina. Na osnovu brojnih karakteristika tih veličina, znajući da će se rezultantni uticaj ponašati po tzv. normalnom zakonu raspodele, moguće je odrediti njegove parametre.
Jedna od najvažnijih brojnih karakteristika slučajne veličine, koja daje neku srednju vrednosti slučajne veličine, naziva se matematičko očekivanje slučajne veličine ili srednja vrednost slučajne veličine. Ova karakteristika opisuje položaj slučajne veličine na brojnoj osi.
Matematičko očekivanje M [X] = mx diskretne slučajne veličine X, koja može da dobije vrednost x1, x2, ... , xn sa odgovarajućim verovatnoćama p1, p2, ..., pn , definisano je izrazom:
∑
∑
=
==+⋅⋅⋅+++⋅⋅⋅++
== n
ii
n
iii
n
nnx
p
px
ppppxpxpxmXM
1
1
21
2211][
Kako je:
∑=
=n
iip
1
1
dobija se za mx izraz:
∑=
=n
iiix pxm
1 (4.8)
Slučajna veličina X, čija je funkcija raspodele F(x), ima matematičko očekivanje u vidu Stiltjesovog integrala:
∫∞
∞−
= )(xxdFmx
Matematičko očekivanje neprekidne slučajne veličine X, čija je gustina raspodele f(x), izražava se integralom:
∫∞
∞−
= dxxxfmx )( (4.9)

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
23
Analogija između izraza (4.8) i (4.9) je očigledna: umesto prekidne vrednosti slučajne promenljive xi uzima se neprekidna vrednost x, umesto verovatnoće pojedinih vrednosti xi dolazi element verovatnoće f(x)dx, a umesto zbira integral. Treba imati u vidu da egzistencija vrednosti mx zavisi od egzistencije izraza (4.8) odnosno (4.9).
Osim karakteristika položaja (srednjih vrednosti), koje predstavljaju tipične vrednosti slučajne veličine, upotrebljavaju se karakteristike raspodele vrednosti slučajne promenljive oko srednjih vrednosti. Ove brojne karakteristike nazivaju se momenti po analogiji sa momentima iz mehanike. Najčešće se koriste centralni momenti, koji se definišu preko centralne slučajne veličine Xc:
xc mXX −=
Centralni momenti k - tog stepena diskretne slučajne veličine X naziva se matematičko očekivanje k - tog stepena odgovarajuće centrirane slučajne veličine:
∑=
−==−n
ii
kxik
kx pmxmmXM
1
)(])[(
Za neprekidnu slučajnu veličinu X odgovarajući centralni momenat k-tog reda dobija se izraz:
∫∞
∞−
−= dxxfmxm kxk )()(
Od centralnih momenata od posebnog je interesa drugi centralni momenat, koji se još naziva i disperzijom slučajne veličine X. Za diskretnu slučajnu veličinu disperzija Dx je data izrazom:
∑∑==
−=−==n
ixii
n
iixix mpxpmxmD
1
22
1
22 )( (4.10)
a za neprekidnu:
∫∞
∞−
−== dxxfmxmD xx )()( 22
Disperzija je karakteristika razbacanosti vrednosti slučajne promenljive oko njenog matematičkog očekivanja. Ukoliko je manja veličina disperzije, utoliko je veći procenat vrednosti slučajne veličine iz oblasti koja neposredno okružuje matematičko očekivanje.
Umesto disperzije Dx koja ima razmeru kvadrata slučajne promenljive, često je pogodnija da se koristi veličina koja ima razmeru same slučajne promenljive. Ta veličina se naziva srednje kvadratno odstupanje ili standardna vrednost i obeležava se sa σx :

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
24
xx D=σ (4.11)
4.2. Neki kontinualni zakoni raspodele pojvljivanja otkaza
Funkcija pouzdanosti i funkcija intenziteta otkaza su jedinstveni, tj. određenoj funkciji pouzdanosti odgovara samo određena funkcija intenziteta otkaza i obrnuto. U ovom odeljku će biti date funkcije gustine otkaza koje su najčešće koriste u proučavanju pouzdanosti, zajedno sa funkcijom pouzdanosti i funkcijom intenziteta otkaza koje se na njih odnose. Isto tako, biće dati izrazi za očekivano vreme bezotkaznog rada za svaki od ovih slučajeva.
4.2.1. Eksponencijalna raspodela
Funkcija gustine otkaza u slučaju eksponencijalne raspodele glasi:
0,0,)( >≥= − λλ λ tetf t (4.12)
gde je λ parametar a t vreme otkaza. Oblik eksponencijalne raspodele dat je na slici (4.1)
tt
f(t)
0
λ F(t)f(t)
R(t) = 1 - F(t)
Slika 4.1 Eksponencijalna raspodela

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
25
t
R(t)
0
1,0
Slika 4.2 Funkcija pouzdanosti u slučaju eksponencijalne raspodele
Korišćenjem jednačine (3.8) može se dobiti funkcija pouzdanosti:
∫ −−=−=t
tdtetFtR0
1)(1)( λλ (4.13)
odnosno:
tetR λ−=)( (4.14)
Oblik funkcije pouzdanosti prikazan je na slici 4.2.
Funkcija intenziteta otkaza je po definiciji (jednačinu 3.17) jednaka:
λλλ λ
λ
=== −
−
t
t
ee
tRtft)()()( (4.15)
Prema tome, u slučaju eksponencijalne raspodele intenzitet otkaza ne zavisi od vremena i uvek ima konstantnu vrednost. To je veoma povoljna okolnost koja mnogo uprošćava izračunavanje u slučajevima kada se može primeniti eksponencijalna raspodela, a to je slučaj kod elektronskih sistema. Proizilazi da se određivanjem parametra λ eksponencijalne raspodele, u isto vreme dobija i vrednost intenziteta otkaza. Intenzitet otkaza se može predstaviti pravom linijom kao na slici 4.3.

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
26
t
λ(t)
0
λ λ = const.
Slika 4.3 Funkcija intenziteta otkaza u slučaju eksponencijalne raspodele
Očekivano vreme bezotkaznog rada dobija se iz jednačine (3.18) ili (3.20):
∫∫∞
−∞
===00
1)(λ
λ dtedttRT tSR (4.16)
Znači, očekivano vreme bezotkaznog rada je jednako recipročnoj vrednosti intenziteta otkaza λ. Ta vrednost se često obeležava sa MTTF, pa je znači:
λ1
=MTTF (4.17)
Ovo je još jedna povoljna okolnost kada je u pitanju eksponencijalna raspodela, jer se određivanjem intenziteta otkaza λ vrlo lako može dobiti vrednost MTTF, i obrnuto.
Slika 4.1. može da posluži za grafičko predstavljanje veza datih jednačina (3.1), (3.2) i (3.4). Poznato je iz teorije verovatnoće da je površina ispod krive f(t) jednaka jedinici. Površina od 0 do vremena t jednaka je verovatnoći pojave otkaza F(t) (jednačina 3.1) dok je površina od vremena t do ∞ jednaka verovatnoći bezotkaznog rada R(t), tj. 1 − F(t) (jednačine 3.2 i 3.3). Isto tumačenje može se primeniti bez obzira na oblik raspodele, što znači da su navedeni odnosi opšte primenljivi.
4.2.2. Normalna raspodela
Jednačina za funkciju gustine otkaza u slučaju normalne raspodele je:

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
27
0,0,0,2
1)(2
21
>>≥=⎟⎠⎞
⎜⎝⎛ −
−σμ
πσσ
μ
tetft
(4.18)
gde je μ - srednja vrednost, σ - standardna devijacija i t - vreme otkaza.
To je dvoparametarska raspodela sa parametrima μ i σ, koja predstavlja dobar model u slučajevima kada dolazi do postepenog starenja sistema u toku upotrebe tj. kada se javlja istrošenost. Pri određivanju pouzdanosti retko se koristi oblik normalne raspodele dat jednačinom (4.18), jer se integral te jednačine ne može izračunati u konačnoj formi. Zbog toga se koristi tzv. standardizovana normalna raspodela ϕ(z), za koju postoje tabele iz kojih se mogu naći površine ispod funkcije gustine otkaza za bilo koju normalnu raspodelu. Jednačina (4.18) može se prevesti u standardizovani oblik uvođenjem smene:
σμ−
=tz (4.19)
Pošto površine ispod f(t) i ϕ(z) moraju biti jednake važi odnos:
dzzdttf )()( ϕ= (4.20)
Iz jednačine (4.20) sledi:
dzdttfz )()( =ϕ (4.21)
dok se diferenciranjem jednačine (4.19) dobija:
σdtdz = (4.22)
Zamenom u jednačinu (4.21) dobija se:
)()( tfz ⋅= σϕ (4.23)
Uzimajući u obzir jednačinu (4.18) može se napisati konačan oblik standardizovane normalne raspodele:
∞<<−∞=⋅−
zezz
,21)(
2
21
πϕ (4.24)
gde je z dato jednačinom (4.19). Funkcija kumulativne raspodele biće jednaka:

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
28
∫ ∫∞− ∞−
⋅−==
z z zdzedzzzF
2
21
21)()(π
ϕ (4.25)
Na slici 4.4 dat je izgled normalne raspodele.
t
f(t) ϕ(z)
0 μ
0 z= t - μ - μσσ
Slika 4.4 Normalna raspodela
t
R(t)
0
1,0
Slika 4.5 Funkcija pouzdanosti u slučaju normalne raspodele
Korišćenjem jednačine (3.4) i uvođenjem standardizovane normalne raspodele, funkcija pouzdanosti se može dobiti u obliku:

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
29
∫∫∞∞
==zt
dzzdttftR )()()( ϕ (4.26)
odnosno:
)(1)(1)( zFdzztRz
−=−= ∫∞−
ϕ (4.27)
Na slici 4.5 dat je oblik funkcije pouzdanosti.
Funkcija intenziteta otkaza λ(t) dobija se iz jednačina (3.17) i (4.23):
)()(
)()()(
tRz
tRtft
σϕλ == (4.28)
To je monotono rastuća funkcija vremena, a njen izgled dat je na slici 4.6.
t
λ(t)
0 Slika 4.6 Funkcija intenziteta otkaza u slučaju normalne raspodele
Korišćenjem jednačina (3.18) i (4.18) može se dobiti očekivano vreme bezotkaznog rada E(T). Posle određenih operacija, dobija se da je:
μ=SRT (4.29)
tj. očekivano vreme bezotkaznog rada jednako je srednjoj vrednosti μ.
Ovde treba dati napomenu koja se odnosi na površinu ispod funkcije f(t) tj. ϕ(z). Ova funkcija je definisana za vrednosti t, tj. z, od −∞ do +∞, i onda je površina ispod nje jednaka 1. Međutim, kako vreme ne može da bude negativno, u teoriji pouzdanosti se normalna raspodela

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
30
definiše za vrednosti t od 0 do ∞. To je sasvim prihvatljivo, jer na primer, kada je t = μ − 4,5σ = 0, tj. z = −4,5 (slika 4.7), površina za t ≤ 0 je svega 0,0000034 što se može zanemariti. Kad je t = μ − 3,5σ = 0, tj. z = −3,5 površina za t ≤ 0 je 0,00023 što je takođe malo, itd.
U praksi, otkazi u zoni tzv. negativnih vremena označavali bi otkaze koji su se desili pre nego što je sistem pušten u korišćenje. Tada se uzima da su ovakvi otkazi desili u vremenu t = 0, a njihovi uzroci su u greškama koje nije otkrila kontrola kvaliteta. Verovatnoća dešavanja ovakve vrste otkaza može se izračunati ako se zna koeficijent varijacije, tj. odnos između standardne devijacije σ i srednje vrednosti μ. Recipročna vrednost koeficijenta varijacije je μ / σ, a vrednosti t = 0 odgovara vrednost z = − μ / σ (sliku 4.4 i jednačina 4.19). Prema tome, ostaje da se iz tablica pročita vrednost površine ispod normalne raspodele levo od − μ / σ, što će dati verovatnoću dešavanja ovakve vrste otkaza.
Isto tako, u teoriji pouzdanosti vrednost za μ uvek je pozitivna jer je to vremenska kategorija, dok u ostalim primenama ova vrednost može biti od −∞ do ∞.
t
f(t) ϕ(z)
0 μ−4σ μ−3σ μ−2σ μ−1σ μ μ+1σ μ+2σ μ+3σ μ+4σ
0-1-2-3-4 1 2 3 4 z
4,5σ
0.0000034
Slika 4.7 Ilustracija definisanosti normalne raspodele za slučaj t = μ − 4,5 σ = 0, tj. z = −4,5
4.2.3. Lognormalna raspodela
Lognormalna funkcija gustine otkaza ima oblik:
0,0,0,2
1)(2ln
21
>>>⋅
=⎟⎠⎞
⎜⎝⎛ −
−σμ
πσσ
μ
tet
tft
(4.30)
gde su μ i σ parametri, a t slučajna promenljiva veličina koja označava vreme otkaza. Na slici 4.8 dat je izgled jedne lognormalne raspodele.
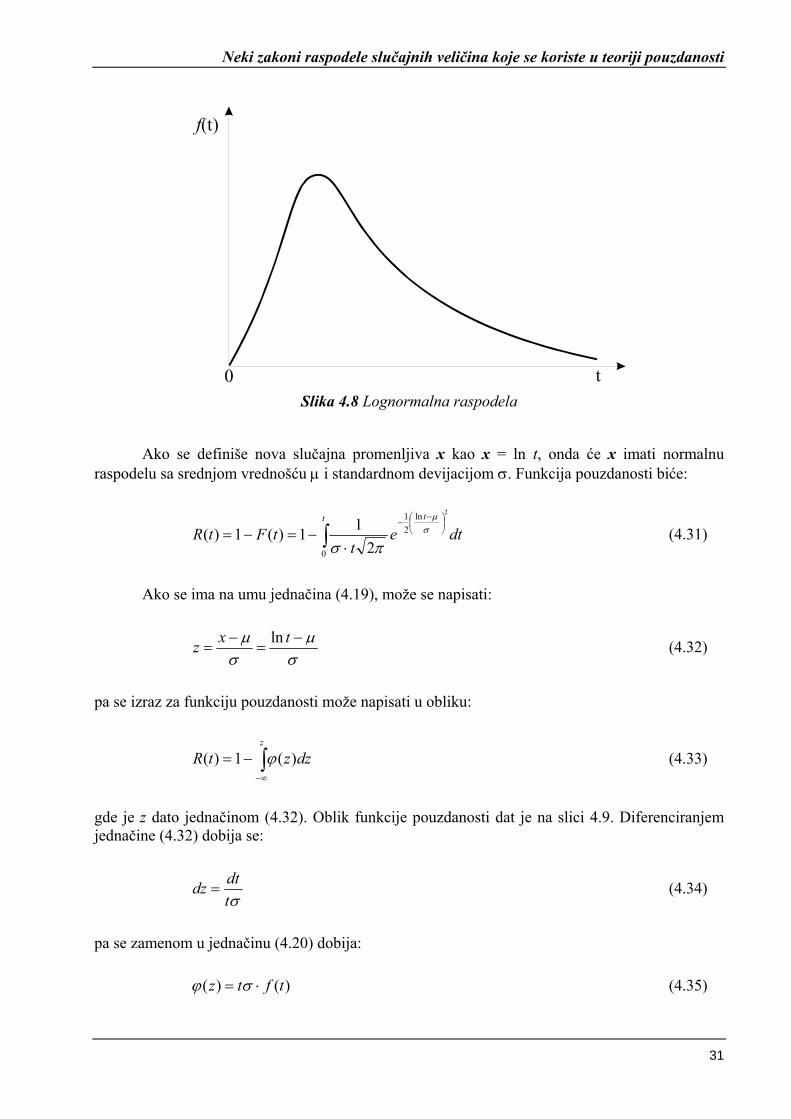
Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
31
t
f(t)
0 Slika 4.8 Lognormalna raspodela
Ako se definiše nova slučajna promenljiva x kao x = ln t, onda će x imati normalnu raspodelu sa srednjom vrednošću μ i standardnom devijacijom σ. Funkcija pouzdanosti biće:
∫⎟⎠⎞
⎜⎝⎛ −
−
⋅−=−=
t t
dtet
tFtR0
ln21 2
211)(1)( σ
μ
πσ (4.31)
Ako se ima na umu jednačina (4.19), može se napisati:
σμ
σμ −
=−
=txz ln (4.32)
pa se izraz za funkciju pouzdanosti može napisati u obliku:
∫∞−
−=z
dzztR )(1)( ϕ (4.33)
gde je z dato jednačinom (4.32). Oblik funkcije pouzdanosti dat je na slici 4.9. Diferenciranjem jednačine (4.32) dobija se:
σtdtdz = (4.34)
pa se zamenom u jednačinu (4.20) dobija:
)()( tftz ⋅= σϕ (4.35)

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
32
gde je z određeno jednačinom (4.32). Sada će funkcija intenziteta otkaza biti:
)()(
)()()(
tRtz
tRtft
⋅==
σϕλ (4.36)
njen oblik dat je na slici 4.10.
t
R(t)
0
1,0
Slika 4.9 Funkcija pouzdanosti za slučaj lognormalne raspodele
Izraz za očekivano vreme bezotkaznog rada TSR dobija se iz jednačina (3.18) i (4.30). Posle određenih matematičkih operacija dobija se:
2
21σμ+
= eTSR (4.37)
t
λ(t)
0 Slika 4.10 Funkcija intenziteta otkaza u slučaju lognormalne raspodele

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
33
Lognormalna raspodela ima veliku primenu u održavanju sistema. Isto tako, to je veoma dobar model za proučavanje otkaza čiji je uzrok zamor materijala.
4.2.4. Vajbulova raspodela
Funkcija gustine otkaza za Vajbulovu raspodelu glasi:
0,0,,)(1
>>≥⎟⎟⎠
⎞⎜⎜⎝
⎛ −=
⎟⎟⎠
⎞⎜⎜⎝
⎛ −−
−
ηβγη
γηβ
β
ηγβ
tettft
(4.38)
gde je t vreme otkaza, γ parametar položaja, β parametar oblika i η parametar razmere. Negativna vrednost parametra γ bi značila da sistem može da otkaže pre početka korišćenja. U momentu puštanja sistema u rad parametar γ jednak je 0, a vreme otkaza t uvek je veće ili jednako γ.
Korišćenjem veze date jednačinom (3.4), funkcija pouzdanosti se može dobiti u sledećem obliku:
β
ηγ
⎟⎟⎠
⎞⎜⎜⎝
⎛ −−
=t
etR )( (4.39)
t
f(t)
0
β=0,5
β=1
β=2
β=3
1η
Slika 4.11 Vajbulova raspodela za γ = 0, η = const. i razne vrednosti parametra β

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
34
t
R(t)
0
1,0
β=0,5
β=1β=2
β=4
Slika 4.10 Funkcija pouzdanosti u slučaju Vajbulove raspodele za γ = 0, η = const. i razne
vrednosti parametra β
Funkcija intenziteta otkaza biće:
1
)()()(
−
⎟⎟⎠
⎞⎜⎜⎝
⎛ −==
β
ηγ
ηβλ t
tRtft (4.40)
Oblik funkcija f(t), R(t) i λ(t) veoma zavisi od parametra γ, β i η. Na slici 4.11 prikazani su razni oblici funkcije gustine otkaza zavisno od vrednosti parametra β, pri čemu je γ = 0 i η = const.
Vajbulova raspodela je veoma složenog oblika, a zavisno od svojih parametara može preći u neku jednostavniju raspodelu. Tako za γ = 0 i β = 1 ona prelazi u eksponencijalnu raspodelu čiji je parametar λ u tom slučaju jednak 1 / η, a kada je γ = 0 i β = z dobija se tzv. Rajlijeva raspodela.
Na slici 4.12 dat je izgled funkcije pouzdanosti zavisno od parametra β
Na oblik funkcije intenziteta otkaza najveći uticaj ima parametar β (slika 4.13).
Kada je 0 < β < 1 funkcija intenziteta otkaza opada sa vremenom, kada je β = 1 intenzitet otkaza ne zavisi od vremena (eksponencijalna raspodela), a kada je β > 1 funkcija intenziteta otkaza je rastuća.
Izraz za očekivano vreme bezotkaznog rada glasi:
⎟⎟⎠
⎞⎜⎜⎝
⎛+Γ+= 11
βηγSRT (4.41)
gde je ⎟⎟⎠
⎞⎜⎜⎝
⎛+Γ 11
β tzv. gama funkcija od ⎟⎟
⎠
⎞⎜⎜⎝
⎛+11
β.

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
35
t
λ(t)
0
β=0,5
β=1
β=2
β=4
1η
Slika 4.13 Funkcija intenziteta otkaza u slučaju Vajbulove raspodele za γ = 0, η = const. i razne
vrednosti parametra β
Vajbulova raspodela se uprkos svoje složenosti veoma često koristi u praktičnim primenama. Razlog je u tome što se mnogi oblici otkaza mogu njome veoma dobro aproksimirati. Dok je primena eksponencijalne raspodele ograničena zbog pretpostavke o konstantnoj vrednosti intenziteta otkaza, dotle Vajbulova raspodela može da uključi opadajuće, konstantne i rastuće funkcije intenziteta otkaza. Kako mnogi otkazi u praktičnim situacijama, naročito u slučajevima neelektronskih sistema, pokazuju rastuću tendenciju u toku vremena, primena Vajbulove raspodele, omogućuje razmatranje oblika ovakvih otkaza.
4.2.5. Gama raspodela
Gama raspodela ima sledeću funkciju gustine otkaza:
0,0,,)(
1)(1
>>≥⎟⎟⎠
⎞⎜⎜⎝
⎛ −Γ
=−
−−
ηβγη
γβη
ηγβ
tettft
(4.42)
gde je t vreme otkaza, γ parametar položaja, β parametar oblika, η parametar razmere i Γ(β) gama funkcija. Ono što je rešeno kod Vajbulove raspodele važi i za gama raspodelu.
Funkcija pouzdanosti biće:
∫−
−−
⎟⎟⎠
⎞⎜⎜⎝
⎛ −Γ
−=−=t t
dtettFtRγ
ηγβ
ηγ
βη
1
)(11)(1)( (4.43)

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
36
Vrednost površine ispod gama funkcije gustine otkaza može se odrediti iz tabela koje su u tu svrhu napravljene. Kada je parametar β ceo broj, može se pokazati da se integral u jednačini (4.43) može izračunati preko redova, tako da je:
∑∑−
=
−−∞
=
−−
⎟⎟⎠
⎞⎜⎜⎝
⎛ −=⎟⎟
⎠
⎞⎜⎜⎝
⎛ −−=
1
0 !1
!11)(
βη
γ
β
ηγ
ηγ
ηγ
k
tk
k
tk
etk
etk
tR (4.44)
Funkcija intenziteta otkaza data je opštom jednačinom (3.17), a kada je β ceo broj može se izračunati iz izraza:
∑−
=
−−
−−
−
⎟⎟⎠
⎞⎜⎜⎝
⎛ −
⎟⎟⎠
⎞⎜⎜⎝
⎛ −Γ
==1
0
1
!1
)(1
)()()(
βη
γ
ηγβ
ηγ
ηγ
βηλ
k
tk
t
etk
et
tRtft (4.45)
U slučaju kada je β ceo broj, gama funkcija Γ(β) dobija se iz obrasca:
)!1()( −=Γ ββ (4.46)
Oblik funkcija f(t), R(t) i λ(t) zavisi od vrednosti γ, β i η.Na slici (4.14) dati su razni oblici funkcije gustine otkaza f(t) zavisno od parametra β, pri čemu je γ = 0 i η = const.
Slika 4.15 prikazuje razne oblike funkcije pouzdanosti R(t) zavisno od parametra β, pri čemu je γ = 0 i η = const.
Razni oblici funkcije intenziteta otkaza λ(t) zavisno od parametra β, pri čemu je γ = 0 i η = const. prikazani su na slici 4.16.
t
f(t)
0
β=0,5
β=1
β=2
β=3
1η
Slika 4.14 Gama raspodela za γ = 0, η = const. i razne vrednosti parametra β

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
37
Kao kod Vajbulove raspodele, funkcija intenziteta otkaza λ(t) opada sa vremenom kada je 0 < β <1, ne zavisi od vremena kada je β =1 i raste sa vremenom kada je β > 1.
Očekivano vreme bezotkaznog rada u slučaju gama raspodele izračunava se iz obrasca:
ηβγ +=SRT (4.47)
β=1
β=3
β=2
t
R(t)
0
1,0
Slika 4.15 Funkcija pouzdanosti u slučaju gama raspodele za γ = 0, η = const. i razne vrednosti
parametra β
t
λ(t)
0
β=0,5
β=1β=2β=3
1η
Slika 4.16 Funkcija intenziteta otkaza u slučaju gama raspodele za γ = 0, η = const. i razne
vrednosti parametra β

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
38
Gama raspodela je fleksibilan model koji može da se primeni u pouzdanosti za opisivanje raznih vrsta otkaza. Za vrednosti parametra γ = 0 i β = 1 gama raspodela prelazi u eksponencijalnu sa parametrom λ = 1 / η. Gama raspodela može da se koristi i za vreme do n-tog otkaza sistema, ako je raspodela vremena otkaza eksponencijalna. U tom slučaju, ako su t1, t2, ... tn, nezavisne slučajne promenljive veličine koje imaju eksponencijalnu raspodelu sa parametrom λ, onda je T = t1+ t2+ ... + tn slučajna promenljiva veličina koja ima gama raspodelu sa parametrima η = 1 / λ i β = n (pri čemu je γ = 0).
4.2.6. Beta raspodela
Ova raspodela koristi se za opis slučajne veličine koja može da uzima vrednosti iz zatvorenog intervala. Ova vrsta raspodele ima veliku ulogu u statističkoj kontroli kvaliteta i teoriji pouzdanosti.
Funkcija gustine raspodele otkaza data je izrazom:
⎪⎩
⎪⎨⎧
>><<−ΓΓ+Γ
≥≤= −− )0,0(10)1(
)()()(
1,00)( 11 βα
βαβα βα ttt
tttf (4.48)
Funkcija raspodele je:
⎪⎪⎩
⎪⎪⎨
⎧
≥
≤≤
≤
=
11
10),(),(
00
)(
t
tBB
t
tF t
βαβα (4.49)
gde je B(α, β) takozvana beta funkcija:
)()()(),(
βαβαβα
+ΓΓΓ
=B (4.50)
a Bt(α, β) nepotpuna beta funkcija:
10)1(),(0
11 ≤≤−= ∫ −− tdzzzBt
tβαβα (4.51)
Očekivano vreme bezotkaznog rada je:
βαα+
=SRT (4.52)

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
39
Neke krive za funkciju B(α, β) date su na slici 4.17.
t
B( , )α β
0 0,5 1
Β(6, 2)
Β(1/2,1/2)
Β(8, 8)Β(1, 3)
1
2
3
Slika 4.17 Gustine beta raspodele
Specijalni slučajevi beta raspodele su:
1) Ravnomerna raspodela
Dobija se za α = β = 1. Gustina raspodele je:
⎪⎩
⎪⎨⎧
∉∈
= )1,0(1)1,0(0
)( tzatza
tf (4.53)
Funkcija raspodele je:
⎪⎩
⎪⎨
⎧
>∈
<
=11)1,0(00
)(tza
tzattza
tF (4.54)
2) Trougaona raspodela
Dobija se za α = 2, β = 1 ili α = 1, β = 2. Gustina raspodele je:
⎪⎩
⎪⎨⎧
∉∈
= )1,0(1)1,0(2
)( tzatzat
tf (4.55)
3) Parabolična raspodela
Dobija se za slučaj α = β = 2. Gustina raspodele je:

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
40
⎪⎩
⎪⎨⎧
∉∈−
= )1,0(1)1,0()1(6
)( tzatzatt
tf (4.56)
4.2.7. Studentova raspodela
Gustina raspodele data je izrazom:
∞<<−∞⎟⎟⎠
⎞⎜⎜⎝
⎛+
⎟⎠⎞
⎜⎝⎛Γ
⎟⎠⎞
⎜⎝⎛ +
Γ==
+−
1,2
1
2
21
1)()(2
12
n
tn
n
ntStf
π (4.57)
Ona se zove još i Studentova t raspodela sa n stepeni slobode. Parametar n može biti proizvoljan pozitivan broj, ali se ova raspodela uobičajeno koristi kada je n prirodan broj.
Matematičko očekivanje je:
TSR = 0 (4.58)
Za velike vrednosti n ova raspodela prelazi u normalnu raspodelu kod koje je μ = 0 i σ = 1. Izgled Studentove raspodele za razne vrednosti n dat je na slici 4.18.
0,1
0,2
f t( )
0-1-2 1 2 t
2
515
Slika 4.18 Gustine Studentove raspodele za n = 2, 5, 15 u poređenju sa normalnom raspodelom
kod koje je μ = 0 i σ = 1 (isprekidana linija)

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
41
4.2.8. Fišerova raspodela, Snedekorova raspodela
Gustina Fišerove raspodele sa parametrima m i n data je izrazom:
∞<<+
⋅⎟⎠⎞
⎜⎝⎛Γ⋅⎟
⎠⎞
⎜⎝⎛Γ
⎟⎠⎞
⎜⎝⎛ +
Γ= +
−
tt
tnm
nm
tf nm
m
0,)1(22
2)(2
12
(4.59)
Parametri m i n nazivaju se stepenima slobode. Matematičko očekivanje je:
22
>−
= nzan
mTSR (4.60)
Smenom t = 1tnm
⋅ dobija se Snedekorova F raspodela slučajne veličine t1. Njena gustina
raspodele je:
21
121
22
)(),(
)( nm
mnm
mtn
tnmBnmFf +
−
−
+⋅
⋅= (4.61)
Matematičko očekivanje za slučajnu veličinu t1 je:
21 −=
nnT SR (4.62)
4.3. Neki diskretni zakoni raspodele za proračun pouzdanosti
U slučaju eksponencijalne, normalne, lognormalne, Vajbulove, gama, beta, Studentove, Fišerove i Snedekorove raspodele slučajna promenljiva veličina (vreme) bila je kontinualnog tipa. U nastavku je dato razmatranje sledećih raspodela: binomne, Poasonove, geometrijske i hipergeometrijske, kod kojih je slučajna promenljiva veličina diskretnog tipa.
4.3.1. Binomna raspodela
Neka u jednoj prostoriji imamo ukupno n identičnih, ali međusobno nezavisnih sijalica. Svaka sijalica može biti ispravna ili neispravna. Označimo sa p verovatnoću da će sijalica biti

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
42
ispravna, što znači da će 1 − p biti verovatnoća da je sijalica neispravna. Recimo da je zahtev takav da se smatra zadovoljavajućim ako od n funkcioniše x ili više sijalica, što znači da je situacija nezadovoljavajuća ako funkcioniše x − 1 ili manje sijalica. Ako sa X označimo slučajnu promenljivu veličinu koja predstavlja broj ispravnih sijalica, onda se verovatnoća da će biti x ispravnih sijalica može izračunati iz izraza:
nxppxn
xXPxf xnx ,...,2,1,0,)1()()( =−⎟⎟⎠
⎞⎜⎜⎝
⎛=== − (4.63)
Funkcija data jednačinom (4.63) predstavlja funkciju gustine verovatnoće u slučaju binomne raspodele. Član
⎟⎟⎠
⎞⎜⎜⎝
⎛xn može da se izračuna iz relacije:
!)!(!
xxnn
xn
−=⎟⎟
⎠
⎞⎜⎜⎝
⎛ (4.64)
Na slici 4.19 dat je izgled funkcije gustine verovatnoće f(x).
x
f(t)
0 Slika 4.19 Binomna raspodela
U ovom primeru zahtev će biti zadovoljen ne samo kada je broj ispravnih sijalica jednak x već i kada je njihov broj veći od x. Prema tome, interesantna je verovatnoća funkcionisanja x, x + 1, . . . , n sijalica. Znači:
inini
xi
ni
xipp
in
iXPxXP −=
=
=
=
−⎟⎟⎠
⎞⎜⎜⎝
⎛===≥ ∑∑ )1()()( (4.65)
Jednačina (4.65) može se napisati i u obliku:

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
43
inixi
ipp
in
xXPxXP −−=
=
−⎟⎟⎠
⎞⎜⎜⎝
⎛−=−≤−=≥ ∑ )1(1)1(1)(
1
0 (4.66)
Funkcija oblika P(X ≤ x − 1) predstavlja kumulativnu funkciju raspodele. U navedenom primeru, ako sa y obeležimo broj neispravnih sijalica, onda je uslov da ima x − 1 ili manje ispravnih sijalica isto što i uslov da ima y ili više neispravnih sijalica, tj.:
1)1( +−=−−= xnxny (4.67)
Slučajna promenljiva veličina Y koja predstavlja broj neispravnih sijalica, imaće analogno jednačini (4.63) sledeću funkciju gustine verovatnoće:
nyppyn
yYPyf yny ,...,1,0,)1()()( =−⎟⎟⎠
⎞⎜⎜⎝
⎛=== − (4.68)
Ako se uvede oznaka 1 − p = q onda je:
nyqqyn
yYPyf yny ,...,1,0,)1()()( =−⎟⎟⎠
⎞⎜⎜⎝
⎛=== − (4.69)
Sada se jednačina (4.66) može pisati u sledećem obliku:
inini
yi
ni
yiqq
in
iYPxXP −=
=
=
=
−⎟⎟⎠
⎞⎜⎜⎝
⎛−==−=≥ ∑∑ )1(1)(1)( (4.70)
odnosno:
iniyi
iqq
in
yYPxXP −−=
=
−⎟⎟⎠
⎞⎜⎜⎝
⎛−=−≤=≥ ∑ )1(1)1()(
1
0 (4.71)
Srednja vrednost funkcije gustine verovatnoće date jednačinom (4.63) biće:
npXTSR =)( (4.72)
a predstavlja očekivani broj sistema koji će uspešno obaviti neki zadatak, ako je n ukupan broj sistema, a p verovatnoća da će jedan sistem uspešno obaviti zadatak.
Srednja vrednost funkcije gustine verovatnoće date jednačinom (4.68) biće:
nqYTSR =)( (4.73)

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
44
a predstavlja očekivani broj sistema koji će otkazati u toku nekog zadatka, gde je n ukupan broj sistema, a q verovatnoća da će jedan sistem otkazati u toku zadatka.
4.3.2. Poasonova raspodela
Kao i binomna i Poasonova raspodela spada u grupu diskretnih raspodela. Funkcija gustine verovatnoće za Poasonovu raspodelu data je jednačinom:
,...2,1,0,!
)()( ====−
xxexXPxf
x αα (4.74)
gde je X slučajna promenljiva veličina koja označava broj otkaza, a α je parametar (α > 0) koji označava najverovatniji broj otkaza. Kada je kod binomne raspodele date jednačinom (4.69) n > 20 i q ≤ 0,05 ona se može zadovoljavajuće aproksimirati Poasonovom raspodelom, pri čemu je α = nq.
Oblik funkcije gustine verovatnoće za Poasonovu raspodelu dat je na slici 4.20.
Kumulativna funkcija raspodele data je izrazom:
...2,1,0,!
)()(0
==≤= ∑=
−
xxexXPxF
x
i
i αα (4.75)
x
f(t)
0 Slika 4.20 Poasonova raspodela
Funkcija gustine verovatnoće za Poasonovu raspodelu može se napisati u obliku:
,...2,1,0,!
)()()( =⋅
===⋅−
xi
etxXPxftx λλ (4.76)

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
45
gde je λ konstanta koja označava frekvenciju odigravanja određenih događaja u jedinici vremena, a t je fiksirani vremenski interval. To znači, ako je λ frekvencija dešavanja otkaza u jedinici vremena, u vremenskom intervalu t može se očekivati ukupno λ⋅t otkaza. Prema tome, u ovom slučaju parametar Poasonove raspodele α jednak je λ⋅t. Kada je broj otkaza x jednak nuli, jednačina (4.74) direktno daje izraz za pouzdanost identičan sa obrascem za pouzdanost u slučaju eksponencijalne raspodele.
Srednja vrednost Poasonove raspodele data je jednačinom:
α=)(XTSR (4.77)
a predstavlja očekivani broj otkaza.
4.3.3. Geometrijska raspodela
Neka se izvodi niz eksperimenata pri čemu je verovatnoća uspeha svakog od njih p, a verovatnoća neuspeha q = 1 − p. Ovo su tzv. Bernoullijevi eksperimenti. Slučajna veličina X predstavlja događaj da je potrebno izvršiti tačno n eksperimenata do prvog neuspeha (na primer otkaza) ima geometrijsku raspodelu. Ova raspodela data je izrazom:
...,2,1)1()()( 1 =−=== − xqqxXPxf x (4.78)
Matematičko očekivanje je jednako:
qxTSR
1)( = (4.79)
Izgled raspodele za q = 0,5 dat je na slici 4.21.

Neki zakoni raspodele slučajnih veličina koje se koriste u teoriji pouzdanosti
46
x
f t( )
0 Slika 4.21 Izgled geometrijske raspodele za q = 0,5
4.3.4. Hipergeometrijska raspodela
Neka je od n elemenata nekog skupa njih m posebno označeno. Bira se slučajan uzorak od r elemenata. Neka je X slučajna promenljiva koja označava broj posebno označenih elemenata u uzorku. Ova slučajna promenljiva ima hipergeometrijsku raspodelu. Ovaj zakon raspodele lako se izvodi poznavanjem kombinatorike i glasi:
...,2,1,)()( =
⎟⎟⎠
⎞⎜⎜⎝
⎛
⎟⎟⎠
⎞⎜⎜⎝
⎛−−
⋅⎟⎟⎠
⎞⎜⎜⎝
⎛
=== x
rn
xrmn
xm
xXPxf (4.80)
Na slici 4.22 dat je izgled hipergeometrijske raspodele za n = 10, m = 5 i r = 5.
x
f t( )
0 Slika 4.22 Hipergeometrijska raspodela za n = 10, m = 5 i r = 5

Određivanje zakona raspodele na osnovu empirijskih podataka
47
5. ODREĐIVANJE ZAKONA RASPODELE NA OSNOVU EMPIRIJSKIH PODATAKA
Ispitivanjem veka trajanja nekog sistema ili njegvim korišćenjem, odnosno posmatranjem slučajnih pojava u tom sistemu, koje nastaju u praktičnim situacijama, kao što je npr. posmatranje vremena do otkaza nekog uređaja, dobija se skup statističkih podataka, koji karakterišu ovu slučajnu pojavu i koji se naziva statistički materijal. Sređivanjem i obrađivanjem ovog materijala primenom raznih statističkih metoda, može se naći odgovarajuća funkcija raspodele kao i njeni parametri, a tom funkcijom najjednostavnije se može aproksimirati posmatrani statističiki materijal.
Jasno se mogu izdvojiti tri zadatka vezana za pronalaženje karakteristika slučajne veličine na bazi eksperimentalnih podataka. To su:
• postavljanje hipoteze o klasi funkcije raspodele kojoj pripada slučajna veličina na osnovu posmatranja statističkog materijala,
• provera ispravnosti postavljene hipoteze
• određivanje nepoznatih parametara raspodele i ocena njihove tačnosti.
U nastavku će biti izložene metode za određivanje funkcije raspodele i njenih parametara .
5.1. Određivanje zakona raspodele grafičkim metodama
Grafičke metode prestavljaju jednostavne postupke za pronalaženje klase funkcije raspodele i njenih parametara, tako da se najvernije može aproksimirati određeni skup statističkih podataka. Upravo ova jednostavnost čini ovu metodu najzastupljenijom u inžinjerskoj praksi.
5.1.1. Određivanje zakona raspodele na osnovu empirijske funkcije raspodele (metodom konstrukcije histograma)
Određivanje zakona raspodele na osnovu epmirijske funkcije raspodele daje dobre rezultate, kada se raspolaže skupom statističkih podataka velkog obima. Kao rezultat dobija se histogram, odnosno izlomljena kriva koja predstavlja aproksimaciju grafika funkcije gustine raspodele. Na taj način mogu se dobiti statističko matematičko očekivanje ∗
xm i statistička
disperzija ∗xD .
Neka je na raspodlaganju skup eksperimentalno dobijenih podataka: .,..., 21 nttt Postupak određivanja zakona raspodele sprovodi se u više sledećih koraka:
1. Normalizuje se skup elemenata nttt ,..., 21 i na taj način dobija novi skup sa elementima nxxx ,..., 21 , koji se računaju po formuli:

Određivanje zakona raspodele na osnovu empirijskih podataka
48
o
ii T
tx = (5.1)
pri čemu je:
∑=
=n
iio t
nT
1
1 (5.2)
2. Deli se celokupni interval vrednosti elemenata skupa ,,..., 21 nxxx na intervale. Optimalan broj intervala dobija se po formuli:
nl log3,31 += (5.3)
3. Svi intervali imaju istu širinu xΔ koja se dobija na sledeći način:
nxxxlog3,31
minmax
+−
=Δ (5.4)
gde su maxx i minx maksimalna i minimalna vrednost iz skupa ,,..., 21 nxxx respektivno.
4. Prebrojavaju se elementi ix , koji pripadaju svakom od intervala, u oznaci id . Na
osnovu id mogu se određivati još neke veličine. Učestanosti i-tog intervala ∗ip se
računa po formuli:
ndp i
i =∗ (5.5)
Suma učestanosti svih intervala jednaka je jedinici odnosno:
11
=∑=
∗l
iip (5.6)
Ako se *ip podeli sa širinom intervala xΔ dobija se veličina ∗
if koja odgovara vrednosti funkcije raspodele na i-tom intervalu.
5. Na osnovu prethodnih tačaka, pristupa se crtanju histograma. Na apscisu se nanosi opseg minmax xx − i ucrtavaju se intervali. Nad svakim intervalom crta se
pravougaonik, čija visina odgovara vrdnosti f ∗i . Ukupna površina ispod histograma
jednaka je jedinici. Oblik histograma govori o kojoj se raspodeli radi, na osnovu sličnosti sa graficima funkcije gustine raspodele ( )xf nekih važnijih raspodela.

Određivanje zakona raspodele na osnovu empirijskih podataka
49
6. Kada se izvrše svi prethodni koraci, mogu da se izračunaju statističko matematičko očekivanje ∗
xm i statistička disperzija ∗xD po formulama:
∑=
∗∗ ⋅=l
iiix pxm
1
(5.7)
( )∑=
∗∗∗ ⋅−=l
iixix pmxD
1
2 (5.8)
gde je ix predstavlja srednju vrednost slučajne promenljive na i-tom intervalu.
Takođe se može izračunati i k-ti centralni momenat, ∗km po formuli:
∗
=
∗ ⋅= ∑ i
l
i
kik pxm
1
(5.9)
fi
*
0 1 2 3 4 5 6 7 interval
Slika 5.1 Histogram slučajne promenljive (aproksimacija gustine raspodele slučajne promenljive)
Glavni nedostatak ovog metoda je nemogućnost razlikovanja uzroka greške, tačnije dali je
greška poslednica fluktuacije skupa statističkih podataka ili teoriskog modeliranja.
5.1.2. Određivanje funkcije raspodele verovtnoće primenom papira vervoatnoće
Određivanje zakona raspodele na osnovu empirijskih podataka
50
Ova metoda se može primeniti u slučaju odrđivanja funkcije raspodele kada se radi o jednoparametarskim i dvoparametarskim zakonima raspodele. U slučaju da se ima višeparametarska raspodela sa N parametara ( )2>N , svodi se na slučaj dvoparametarske raspodele.
Dvoparametarska funkcija raspodele se predstavlja u obliku r =F(t,a,b) gde su a i b parametri raspodele, a t slučajni parametar vremena. Cilj je da se izvrše sledeće transformacije:
( )( )trtt
β
α
=
=∗
* (5.10)
tako da svaka funkcija raspodele iz posmatrane klase raspodela predstavlja u ravni (t*,r*) pravu liniju:
*r = ),(),( * batba ψφ + (5.11)
gde su ( )ba,φ i ( )ba,ψ koeficijent pravca i slobodan član respektivno. Na osnovu njih se određuju nepoznati parametri raspodele.
U nastavku će biti prikazane eksponencijalna, Vajbulova, normalna i logaritamsko-normalna raspodela, zato sto su najzastupljenije u inžinjerskoj praksi.
Eksponencijalna funkcija raspodele predstavlja jednoparametarsku funkciju raspodele:
( ) tetF λλ −−= 1, (5.12)
Logaritmovanjem leve i desne strane, a zatim sređivanjem tako dobijenog izraza dobija se da je :
( ) ttF
λλ
=− ,1
1ln (5.13)
Iz ovoga se vidi da je tražena transformacija ravni (t,r) u ravan (t*,r*) data sa :
( )tt
tFr
=
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=
*
*
,11ln
λ (5.14)
Odavde se dobija jednakost:
** tr λ= (5.15)
koja u ravni (t*,r*) predstavlja pravu sa koeficijentom pravca λ .

Određivanje zakona raspodele na osnovu empirijskih podataka
51
Papir verovatnoće za eksponencijalnu raspodelu predstavlja koordinatni sistem u kome je na apscisi linearna podela po promenljivoj t, a na ordinati logaritamska tj. ln(1/(1-F(t,λ))).
Vajbulova funkcija raspodele predstavlja u sledećem zapisu dvoparametarsku funkciju raspodle:
ηληλ )(1),,( tetF −−= (5.16)
Sređivanjem ovog izraza dobija se:
( )ηληλ ,,1)( tFe t −=− (5.17)
ili:
),,(11)(
ηληλ
tFe t
−= (5.18)
Logaritmovanjem leve i desne strane dobija se :
( )⎟⎟⎠
⎞⎜⎜⎝
⎛−
=ηλ
λ η
,,11ln)(tF
t (5.19)
a nakon toga ponovnim logaritmovanjem konačno se dobija sledeći izraz :
( ) ληηηλ
lnln,,1
1lnln +=⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎟⎠
⎞⎜⎜⎝
⎛−
ttF
(5.20)
tako da tražena transformacija (t,r)→(t*,r*) ima oblik :
( )tt
tFr
ln
,,11ln
*
*
=
⎟⎟⎠
⎞⎜⎜⎝
⎛−
=ηλ (5.21)
Zamenom ovih izraza u jednačinu (5.20) dobija se jednakost :
ληη ln** += tr (5.22)
“Papir verovatnoće” za Vajbulovu raspodelu predstavlja koordinatni sistem u kome je na apscisi logaritamska podela po promenljivoj t, tj. ln(t), a na ordinati dvostruka logaritamska podela, tj. ln(ln(1/(1-F(t,λ,η)))).

Određivanje zakona raspodele na osnovu empirijskih podataka
52
Normalana raspodela spada takođe u dvoparametarske raspodele :
( ) ⎟⎠⎞
⎜⎝⎛ −
=σ
μφσ tmtF ,, (5.23)
Uvođenjem smene z=(t-μ)/σ dobija se izraz za kumulativnu verovatnoću koji glasi :
( ) ∫∞−
−=
z z
dzezF 2
2
21π
(5.24)
Posle niza matematičkih operacija dolazi se do traženih relacija, odnosno :
tt
ttr
=
−=⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −
= −
*
1*
σμ
σμφφ
(5.25)
na osnovu kojih se zaključuje da je jednačina prave u ravni (t*,r*) data sledećim izrazom :
σμ
σ−=
** tr (5.26)
“Papir verovatnoće” za normalnu raspodelu predstavlja koordinatni sistem u kome je na apscisi linearna podela po promenljivoj t, a na ordinati podela koja odgovara φ-1[φ((t-μ)/σ)].
Logaritamsko-normalna raspodela kao i prethodne dve, spada u dvoparametarske raspodele. Za nju važi da je :
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛⎟⎠⎞
⎜⎝⎛ −
+=2
ln121,,
σμσμ terftF (5.27)
Posle niza matematičkih operacija pronalaženja transformacije dobija se da “papir verovatnoće” za logaritamsko normalnu raspodelu predstavlja koordinatni sistem u kome je na apscisi logaritamska podela po promenljivoj t, a na ordinati podela koja odgovara normalnoj raspodeli.
Obzirom da je u prethodnom tekstu iznet način formiranja “papir verovatnoće” za određene klase funkcija raspodela, u nastavku će u celosti biti prikazan način određivanja klase funkcije raspodele i njenih parametara primenom ove metode.
1. Na osnovu skupa statističkih podataka, predpostavlja se funkcija raspodele koja će modelirati pomenuti skup i uzima se “papir verovatnoće” koji odgovara toj raspodeli.

Određivanje zakona raspodele na osnovu empirijskih podataka
53
2. Preuredi se posmatrani skup statističkih podataka, koji je u opštem slučaju neuređeni niz t1,t2,...,tn u neopadajući niz t(1),t(2),...,t(n).
3. Svaki podatak se ucrtava na “papir verovatnoće” kao tačka čije su koordinate ( ) ( )[ ]niit /5,0, − , ako se verovatnoća daje u apsolutnim vrednostima ili kao tačka ( ) ( )[ ],/5,0100, niit − ako se verovatnoća zadaje u procentima.
4. Ako je moguće aproksimira se ucrtani skup tačaka pravom linijom koja je povučena od oka ili korišćenjem metode najmanjh kvadrata. Parametri m i k, prave y = mt + k, nalaze se metodom najmanjih kvadrata, minimiziranjem funkcije S koja je data jednačinom:
( )∑=
−+=n
iii ymtkS
1
2 (5.28)
što se postiže izjednačavanjem parcijalnih izvoda po m i k sa nulom:
( ) 021
=−+=∂∂ ∑
=
n
iiii ymtkt
mS (5.29)
( ) 01
=−+=∂∂ ∑
=
n
iii ymtk
kS (5.30)
Odavde se dobija sistem od dve jednačine sa dve nepoznate:
∑ ∑ ∑= = =
=+n
i
n
i
n
iiiii yttmtk
1 1 1
2 (5.31)
∑ ∑= =
=+n
i
n
iii ytmnk
1 1
(5.32)
čijim se rešavanjem dobijaju parametri m i k, uz korišćenje sledećeih relacija:
( )
n
tmyk
ttn
ytytnm
n
i
n
iii
n
i
n
iii
n
i
n
i
n
iiiii
∑ ∑
∑ ∑
∑ ∑ ∑
= =
= =
= = =
⋅−=
⎟⎠
⎞⎜⎝
⎛−⋅
⋅−⋅=
1 1
1
2
1
2
1 1 1
(5.33)
5. U ovom koraku dolazi do izražaja subjektivnost ove metode. Potrebno je da se proceni dali povučena prava verno aproksimira ucrtane tačke. Rešavanjem sistema jednačina:

Određivanje zakona raspodele na osnovu empirijskih podataka
54
( )bam ,φ=
( )bak ,ψ= (5.34)
određuju se nepoznati parametri a i b funkcije raspodele verovatnoće. Međutim, ukoliko se uoči sistematsko odstupanje tačaka od povučene prave, pretpostavljeni model nije adekvatan i cela procedura se sprovodi iz početka.
5.2. Određivanje zakona raspodele analitičkim metodama
Od analitičkih metoda, kojima se određuju zakoni raspodele, u okviru ovog odeljka izložene su: metoda momenata i metoda maksimalne verodostojnosti:
5.2.1. Određivanje zakona raspodele metodom momenata
Neka je t1,t2,...tn skup eksperimentalno dobijenih podataka, koji pretstavlja uzorak koji posmatramo. Na osnovu ovog uzorka pretpostavi se zakon raspodele, na taj način, što se na osnovu dobijenih podataka, proceni koja raspodela najbolje odgovata tim podacima, a zatim se računaju nepoznati parametri pretpostavljenog zakona raspodele. Procenjena vrednost k-tog momenta u odnosu na koordinatni početak (k-ti centralni momenat) računa se po sledećoj formuli:
∑=
=n
i
kik t
nm
1
1 (5.35)
Procenjena vrednost momenta teži ka stvarnoj vrednosti momenta kada obim uzorka teži beskonačnosti. Stvarna vrednost k-tog centralnog momenta izračunava se iz pretpostvljenog zakona raspodele f(t) po formuli:
( )dttftm kk ∫= (5.36)
Metoda momenata, svodi se na to da se izjednači r prvih momenata dobijenih iz zakona raspodele i procena tih momenata dobijenih na osnovu eksperimentalnog uzorka i da se na osnovu tih r jednačina izračuna r nepoznatih parametara koji figurišu u pretpostavljenom zakonu raspodele.
5.2.2. Određivanje zakona raspodele metodom maksimalne verodostojnosti
Prednost ovog metoda je da su procene koje iz njega proizilaze, sa teorijskog stanovišta, asimptotski centrirane i asimptotski najefikasnije. Mana je da su izračunavanja, često vrlo komplikovana. Neka slučajna promenljiva T ima zakon raspodele ( )ktf θθθ ,...,, 21 gde su

Određivanje zakona raspodele na osnovu empirijskih podataka
55
1θ , kθθ ,...2 nepoznati parametri. Iz eksperimenta se dobija skup vrednosti slučajne promenljive t1,t2,...tn. Funkcija maksimalne verodostojnosti se definiše na sledeći način:
( ) ( ) ( ) ( )knkkK tftftfL θθθθθθθθθθθθ ,...,,,...,,,...,,,..., 2121221121 ⋅⋅= (5.37)
Ocena ∗iθ parametra iθ je ocena metodom maksimalne verodostojnosti ako funkcija L
ima maksimum za vrednost ∗= ii θθ , tj. ako je:
( ) 0,..,...1 =∂
∂∗= ii
i
kiLθθθ
θθθ (5.38)
Na ovaj način se dobija k jednačina, iz kojih se izračunavaju ocene parametara ∗iθ . Radi
olakšavanja ove metode često se umesto funkcije L korisit funkcija:
( ) ( )∑=
=n
ikk tfL
121121 ,...,,ln,...,ln θθθθθθ (5.39)
a ocene parametara se tada račuaju iz jedančina tipa:
( ) 0,...,...ln 1 =∂
∂∗= ii
i
kiLθθθ
θθθ (5.40)
5.3. Određivanje tačnosti parametara raspodele
Sasvim je logično, da ne postoji mogućnost, da se u praktičnim situacijama izvrši veoma veliki broj eksperimenata. Posmatrano sa te strane, pouzdanost prestavlja verovatnoću sa određenim nivoom poverenja. To znači da se ocenjeni parametri neke raspodele mogu razlikovati od stvarnih vrednosti. U interesu je da se zna sa kakvim se poverenjem može računati, da će ta greška biti unutar nekih granica. U tom cilju definiše se interval poverenja Ip za ocenu parametra a* nekog stvarnog parametra a. Prema tome :
( )εε +−= ** , aaI p (5.41)
gde je ε izabrano tako da je verovatnoća P(-ε<a-a*<ε) = p.
Interval poverenja može biti jednostran i dvostran. Verovatnoća data sledećim izrazom :
( ) βα −−=≤≤ 121 aaaP (5.42)

Određivanje zakona raspodele na osnovu empirijskih podataka
56
naziva se dvostrana verovatnoća, a a1 i a2 su donja i gornja granica intervala poverenja.
U slučaju jednostranjh intervala poverenja donja i gornja granica intervala poverenja određene su sledećim jednačinama :
( )( ) α
β−=≤−=≥
11
2
1
aaPaaP
(5.43)
gde su 1-α i 1-β jednostrane verovatnoće. Najčešće se usvaja da su α i β jednaki.
Nalaženje intervala poverenja za ocenu parametra a* nije poznat i zavisi od zakona raspodele slučajne promenljive X, kao i od same vrednosti parametra a. Zato se često primenjuju približni postupci.
Jedan od načina određivanja intervala poverenja za matematičko očekivanje i disperziju se svodi na to da je ocena mx
* (ocena matematičkog očekivanja) suma n nezavisnih slučajnih vrednosti xI koje sve imaju isti zakon raspodele. Prema tome može se predpostaviti da je zakon raspodele ocene mx
* normalan i da ima karakteristike mx i Dx/n za matematičko očekivanje i disperziju. Uz predpostavku da je veličina Dx poznata, procena intervala poverenja sa verovatnoćom p računa se iz jednačine :
( ) 12* −⎟⎠⎞
⎜⎝⎛=≤−σεφεxx mmP (5.44)
pri čemu je :
nDx=σ (5.45)
Dakle, vrednost ε se izračunava iz formule :
p=−⎟⎠⎞
⎜⎝⎛ 12σεφ (5.46)
tj. ne zavisi od vrednosti mx. Ako Dx nije poznato, može se umesto toga uzeti statistička vrednost Dx
*. Prema tome :
( )2*1
2
*x
n
ii
x mn
xD −=
∑= (5.47)
Na isti način može se naći i interval poverenja za disperziju.
Za gore opisan način određivanja intervala poverenja nije bilo neophodno da se zna tip zakona raspodele. Međutim, ako se zna tip zakona raspodele, mogu se izvesti tačniji postupci. Ideja ovih postupaka je da se umesto nejednakosti u kojima figuriše ocena parametra a* koristi

Određivanje zakona raspodele na osnovu empirijskih podataka
57
neka druga funkcija eksperimentalno dobijenih podataka x1,…,xn slučajne veličine X i obima eksperimenta n.
U okviru ovog poglavlja prikazane su razne metode za pronalaženje funkcija raspodele, koje najvernije aproksimiraju neki skup statističkih podataka. Proučavane su one funkcije koje su najrasprostranjenije u inžinjerskoj praksi.

Analiza pouzdanosti dvostacionarnih sistema
58
6. ANALIZA POUZDANOSTI DVOSTACIONARNIH SISTEMA
Prilikom analize pouzdanosti nekog kompleksnog sistema, nužno je razložiti taj sistem na funkcionalne celine koje mogu predstavljati podsisteme, uređaje, blokove, elemente i sl. U ovoj glavi razmatraju se tzv. vremenski nezavisni i vremenski zavisni sistemi.
6.1. Metode određivanja pouzdanosti vremenski nezavisniih sistema
U ovoj glavi razmatra se slučaj kada je pouzdanost sistema i pouzdanost sastavnih delova sistema konstantna, što znači da je pretpostavljen jedan nepromenljivi vremenski interval. Analiza pouzdanosti sistema u ovom slučaju bazira se na poznavanju pouzdanosti sastavnih delova i njihovog uticaja na rad sistema. Taj uticaj može biti različit za razne konfiguracije, pa postoje i različiti pristupi proračunu pouzdanosti. Dobijena pouzdanost na ovaj način naziva se prognozirana ili proračunata pouzdanost, a tek naknadnim ispitivanjem protoripa proverava se njena vrednost.
6.1.1. Pouzdanost u slučaju redne veze blokova pouzdanosti
Sistem od n elemenata za čiji je ispravan rad potrebno da svih n elemenata ispravno radi predstavlja se rednom vezom blokova pouzdanosti tih elemenata.
U analizi pouzdanosti sistema veoma često se javlja redna veza blokova pouzdanosti. Blok dijagram ove konfiguracije prikazan je na slici 6.1.
Slika 6.1 Redna konfiguracija
Dakle, da bi ceo sistem uspešno funkcionisao svaki od elemenata mora da bude ispravan. Ovaj sistem može da predstavlja proceduru lansiranja satelita u orbitu koji se sastoji od n operacija ili, jednostavnije, sistem od n redno vezanih prekidača ( svi moraju da se zatvore da bi struja proticala). Neka je xi događaj koji označava uspešno funkcionisanje i-tog elementa, a ix događaj njegovog neuspešnog funkcionisanja. Tada će pouzdanost, tj. verovatnoća uspešnog funkcionisanja i-tog elementa biti P(xi), a verovatnoća da će i-ti element da otkaže P( ix ). Pouzdanost čitavog sistema R biće u tom slučaju jednaka verovatnoći uspešnog funkcionisanja tog sistema Ps, tj. verovatnoći preseka događaja x1,x2,...,xn. Kako je za uspešno funkcionisanje sistema neophodno da svi elementi sistema budu ispravni, pouzdanost sistema biće:

Analiza pouzdanosti dvostacionarnih sistema
59
R = Ps = P( x1 ∩ x2 ∩ x3 ∩ ... ∩ xn ) (6.1)
odnosno:
R = P( x1 ) P(x2/ x1)P(x3/ x1x2)...P(xn/ x1 x2... xn-1) (6.2)
U jednačini (6.2) postoje kondicione verovatnoće, jer nije uvedena pretpostavka nezavisnosti otkaza između elemenata 1,2,...,n. Na primer, P(xn/x1...xn-1) označava verovatnoću ispravnog funkcionisanja n-tog elementa pod uslovom da su svi elementi od 1 do n-1 ispravni. Međutim, ako elementi pri funkcionisanju ne utiču jedni na druge onda su njihovi otkazi nezavisni, pa se jednačina (6.2) može napisati u jednostavnijem obliku:
R = P( x1 )P( x2 )...P(xn) = 1
( )i n
ii
P x=
=∏ (6.3)
U slučaju kad su otkazi nezavisni i elementi identični, pri čemu je pouzdanost svakog elementa p, pouzdanost sistema biće
R=pn (6.4)
Pouzdanost sistema može se računati i na drugi način. Naime, sistem će otkazati ako bilo koji od elemenata u nizu otkaže. Zato je:
R= Ps = 1 – F = 1 – P( 1 2 3 ... )nx x x x∪ ∪ ∪ ∪ (6.5)
gde je F verovatnoća otkaza, odnosno nepouzdanost sistema.
6.1.2. Pouzdanost u slučaju paralelne konfiguracije blokova pouzdanosti
Sistem od n elemenata za čiji je ispravan rad dovojlno da bar jedan element ispravno radi predstavlja se paralelnom vezom blokova pouzdanosti.
Paralelna konfiguracija se susreće u dva slučaja: kao rezultat strukture samog sistema, i kao posledica konstrukcijskog rešenja kada se radi povećanja pouzdanosti ugrađuju rezervni elementi koji ili rade u toku rada sistema, ili se uključuju kada neki element otkaže.
Dakle, kod paralelne konfiguracije, sistem uspešno funkcioniše ako je bilo koji od elemenata 1,2,...,n ispravan. Verovatnoća uspešnog funkcionisanja sistema, tj. pouzdanost sistema, bicće jednaka verovatnoći unije svih događaja x1,x2,...,xn:
R = Ps = P( x1 U x2 U ... U xn ) (6.6)

Analiza pouzdanosti dvostacionarnih sistema
60
Slika 6.2 Paralelna konfiguracija
Računanje verovatnoće unije događaja je komplikovano pa se zato računanje vrši preko nepouzdanosti F. Naime, sistem će otkazati samo ako svi elementi otkažu. Zato se može napisati sledeće:
1 2 31 1 ( ... )nR F P x x x x= − = − ∩ ∩ ∩ ∩ =
1 2 1 3 1 2 1 2 11 ( ) ( / ) ( / )... ( / ... )n nP x P x x P x x x P x x x x −= − (6.7)
U slučaju da su otkazi elemenata nezavisni, jednačina (6.7) se pojednostavljuje i dobija se sledeće:
R = 1 - P( 1x )P( 2x )...P( nx ) = 1 - 1
( )i n
ii
P x=
=∏ (6.8)
U slučaju da su svi elementi identični, pri čemu je pouzdanost svakog od njih p, nepouzdanost će biti 1-p pa se dobija:
R =1 - ( 1 – p )n (6.9)
U prethodnim razmatranjima polazi se od pretpostavke da svi elementi sistema otpočinju sa radom u momentu uključenja sistema, kao i da je za uspešno funkcionisanje veze dovoljna ispravnost makar jednog elementa. Međutim, kasnije će se videti da postoje sistemi sa elementima u pripravnosti gde svi elementi ne startuju od početka kad i sistem, kao i sistemi gde je za ispravno funkcionisanje potrebno da bude ispravno više od jednog elementa.

Analiza pouzdanosti dvostacionarnih sistema
61
6.1.3. Pouzdanost u slučaju kombinovane konfiguracije blokova pouzdanosti
U slučaju kombinacije redne i paralelne veze blokova pouzdanosti, pouzdanost takvog sistema dobija se razlaganjem na prostije celine koje imaju ili samo rednu ili samo paralelnu konfiguraciju i primenjuje se već izloženi postupak proračuna. Na slici 6.3 prikazan je slučaj redno-paralelne konfiguracije.
x11 x1n
x21 x2n
xi1 xin
xm1 xnn
Slika 6.3 Redno paralelna konfiguracija
Ova struktura je sačinjena od n redno vezanih grupa koje se sastoje od jednakog broja m paralelno vezanih blokova.Analogno dosadašnjim razmatranjima, pouzdanost j-te grupe će biti:
1 21
1 ( ) ( )... ( ) 1 ( )i m
j j j mj iji
R P x P x P x P x=
=
= − = −∏ (6.10)
Pošto je Rj pouzdanost j-te grupe, ukupna pouzdanost cele redno-paralelne veze će biti:
1 21 1 1
... [1 ( )]j n j n i m
n j ijj j i
R R R R R P x= = =
= = =
= = = −∏ ∏ ∏ (6.11)
Ako su svi elementi identični i verovatnoća uspešnog funkcionisanja svakog od njih jednaka p, jednačina (6.11) dobija oblik:
R = 1
[n
j=∏ 1 – (1- p)m] = [ 1 – ( 1 – p )m ]n (6.12)
Procedura određivanja pouzdanosti kada se broj elemenata u grupama razlikuje ista je kao i kad je broj elemenata u grupama isti. Prema tome, za redno-paralelnu konfiguraciju, gde su
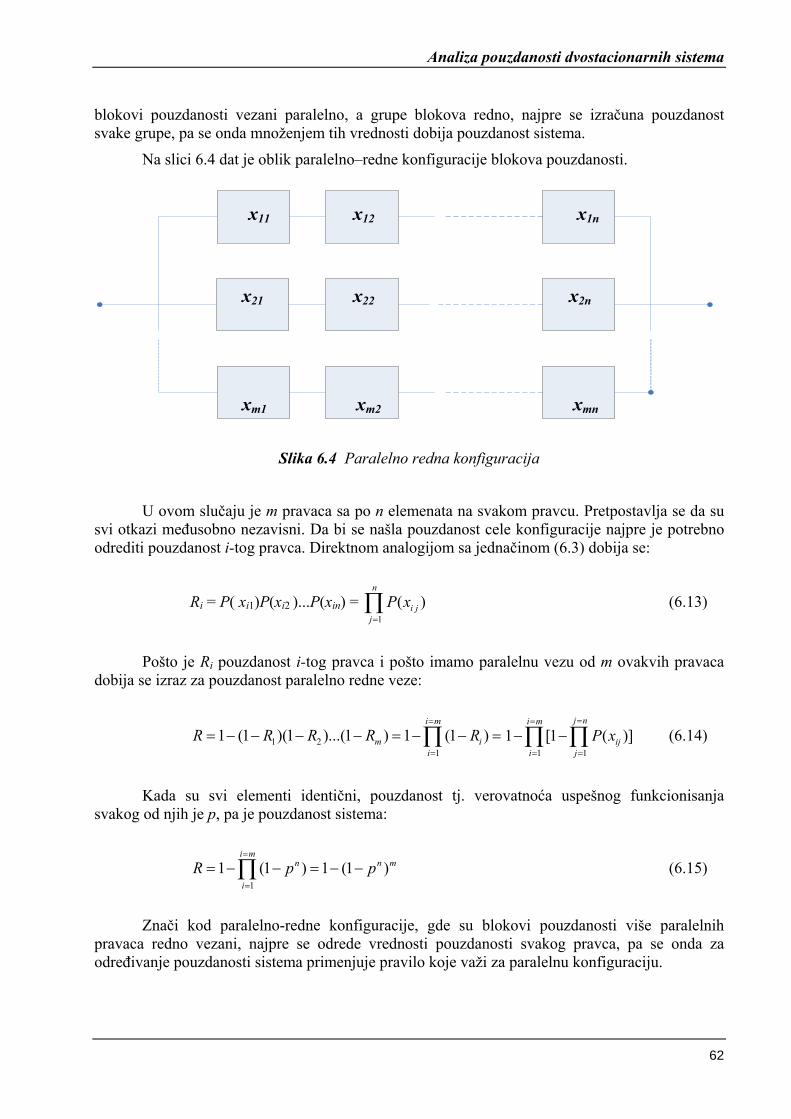
Analiza pouzdanosti dvostacionarnih sistema
62
blokovi pouzdanosti vezani paralelno, a grupe blokova redno, najpre se izračuna pouzdanost svake grupe, pa se onda množenjem tih vrednosti dobija pouzdanost sistema.
Na slici 6.4 dat je oblik paralelno–redne konfiguracije blokova pouzdanosti.
x11 x12 x1n
x21 x22 x2n
xm1 xm2 xmn
Slika 6.4 Paralelno redna konfiguracija
U ovom slučaju je m pravaca sa po n elemenata na svakom pravcu. Pretpostavlja se da su svi otkazi međusobno nezavisni. Da bi se našla pouzdanost cele konfiguracije najpre je potrebno odrediti pouzdanost i-tog pravca. Direktnom analogijom sa jednačinom (6.3) dobija se:
Ri = P( xi1)P(xi2 )...P(xin) = 1
( )n
i jj
P x=
∏ (6.13)
Pošto je Ri pouzdanost i-tog pravca i pošto imamo paralelnu vezu od m ovakvih pravaca dobija se izraz za pouzdanost paralelno redne veze:
1 21
1 (1 )(1 )...(1 ) 1 (1 )i m
m ii
R R R R R=
=
= − − − − = − − =∏1 1
1 [1 ( )]j ni m
iji j
P x==
= =
− −∏ ∏ (6.14)
Kada su svi elementi identični, pouzdanost tj. verovatnoća uspešnog funkcionisanja svakog od njih je p, pa je pouzdanost sistema:
1
1 (1 ) 1 (1 )i m
n n m
i
R p p=
=
= − − = − −∏ (6.15)
Znači kod paralelno-redne konfiguracije, gde su blokovi pouzdanosti više paralelnih pravaca redno vezani, najpre se odrede vrednosti pouzdanosti svakog pravca, pa se onda za određivanje pouzdanosti sistema primenjuje pravilo koje važi za paralelnu konfiguraciju.

Analiza pouzdanosti dvostacionarnih sistema
63
6.1.4. Određivanje pouzdanosti metodom rastavljanja
Postoje takve konfiguracije elemenata za koje se ne mogu primeniti procedure izračunavanja pouzdanosti kao kod rednih elemenata, paralelnih elemenata i elemenata u pripravnosti. Na slici 6.5 dat je blok dijagram pouzdanosti za jedan takav sistem.
A
B D
C E
Slika 6.5 Složena konfiguracija
Da bi se izračunala pouzdanost ovog sistema koristi se teorema kondicionalne verovatnoće koja glasi:
∑=
=2
1
)()/()(i
ii ZPZSPSR (6.16)
gde S označava određeni događaj, a Zi su međusobno isključivi događaji, pri čemu je:
1)(2
1=∑
=iiZP (6.17)
Koristiće se specijalan slučaj kad je n = 2:
)()/()()/()( 2211 ZPZSPZPZSPSP += (6.18)
gde su Z1 i Z2 međusobno isključivi događaji.
Da bi se primenila jednačina (6.18) za određivanje pouzdanosti moraju se definisati događaji S, Z1 i Z2. Događaj S predstavljaće uspešno funkcionisanje sistema, pa će kao posledica toga P(S) biti pouzdanost tog sistema. Kako je u tom slučaju S događaj koji označava otkaz sistema, )(SP biće nepouzdanost sistema F = 1 − R. Događaj Z1 označavaće da je neki element x ispravan, a događaj Z2 da je taj isti element neispravan. Pouzdanost sistema će tada biti:
)()/()()/()( xPxSPxPxSPSPR +== (6.19)
Prema tome, pouzdanost sistema se dobija kad se verovatnoća uspešnog funkcionisanja sistema pod uslovom da je element x ispravan pomnoži sa verovatnoćom ispravnosti tog elementa,

Analiza pouzdanosti dvostacionarnih sistema
64
pa se to sabere sa proizvodom između verovatnoće uspešnog funkcionisanja sistema pod uslovom da je elemenat x neispravan i verovatnoće neispravnosti tog elementa.
U nekim slučajevima je lakše prvo naći nepouzdanost sistema, pa onda oduzimanjem od 1 naći pouzdanost. Analogno sa jednačinom (6.19) izraz za nepouzdanost sistema ima oblik:
)()/()()/()( xPxSPxPxSPSPF +== (6.20)
U poslednje dve jednačine za R i F element x može biti bilo koji u okviru datog sistema, što znači da su te jednačine uvek primenljive. Izbor elementa x veoma je značajan u pogledu dužine trajanja određivanja pouzdanosti sistema. Ako se izabere element koji, na osnovu blok dijagrama pouzdanosti, najviše utiče na pouzdanost sistema - procedura će biti kraća, i obrnuto. Znači, odabiranjem pogodnog elementa jedna relativno složena operacija rastavlja se na dve prostije. U veoma složenim konfiguracijama ovaj proces rastavljanja može se ponavljati više puta, sve dok se ne dobiju konfiguracije čiju pouzdanost je lako odrediti.
Gledajući konfiguraciju na slici 6.5 može se pisati sledeće:
)()/()()/()( APASPAPASPSP += (6.21)
jer je očigledno da je najlakše rastavljanje vršiti po elementu A. Ako je element A dobar, sistem će otkazati u slučaju da otkaže element D i makar jedan od elemenata C i E. Prema tome, može se pisati:
[ ])()(1)()/( EPCPDPASP −= (6.22)
U slučaju da element A ne radi sistem će otkazati u slučaju sa redna veza elemenata B i D otkaže. Prema tome:
)()(1)/( DPBPASP −= (6.23)
Pošto su nađene kondicionalne verovatnoće, mogu se zameniti u izraz (6.21) te se tako dobija izraz za )(SP odnosno nepouzdanost sistema:
[ ] [ ] )()()(1)()()(1)()( APDPBPAPEPCPDPSP −+−= (6.24)
pa se oduzimanjem ove jednačine od 1 dobija pouzdanost.
6.1.5. Pouzdanost u slučaju modela „r od n“
U razmatranju paralelne veze elemenata vide se da je za njeno uspešno funkcionisanje dovoljna ispravnost makar jednog elementa. Međutim, u nekim slučajevima to nije tako. Na primer, u jednom sistemu za napajanje fabričkog pogona električnom energijom putem četiri

Analiza pouzdanosti dvostacionarnih sistema
65
motorna agregata minimalno je potrebno da barem dva agregata budu ispravna. Posmatra se paralelna konfiguracija od n elemenata od kojih barem r mora uspešno da funkcioniše da bi ceo sistem ispravno funkcionisao.
Da bi se došlo do tražene pouzdanosti moraju se razmotriti sva moguća stanja u kojima sistem može da se nađe pa se onda posmatra za koja stanja sistem ispravno radi, a za koja ne. Neka je xi događaj da i-ti element radi a ix događaj da ne radi. Tada (xi+ ix ) predstavlja skup svih događaja tog elementa. Ako se sistem sastoji iz tri elementa, tada su sva njegova stanja data izrazom:
321321321
321321321321321332211 ))()((xxxxxxxxx
xxxxxxxxxxxxxxxxxxxxx++
++++++=+++
(6.25)
Svaki član sa desne strane (6.25) predstavlja određenu kombinaciju stanja elemenata. Na primer, x1x2x3 označava da su svi ti elementi ispravni. Stanje koje vodi uspešnom funkcionisanju može se odrediti iz blok dijagrama pouzdanosti. Tako, ako su elementi x1,x2 i x3 u rednoj vezi, onda će samo stanje x1x2x3 označavati uspešno funkcionisanje sistema.
Ako se pretpostavi da su x1,x2 i x3 u paralelnoj vezi, i ako se zahteva da budu ispravna najmanje dva elementa onda je sistem ispravan ako se nalazi u jednom od sledećih stanja: x1x2x3, x1x2 3x , x1 2x x3, 1x x2x3. Pouzdanost sistema je zbir verovatnoća onih stanja koja obezbeđuju uspešno funkcionisanje sistema. Tako se dobija:
1 2 3 1 2 3 1 2 3 1 2 3( ) ( ) ( ) ( )R P x x x P x x x P x x x P x x x= + + + (6.26)
Ako su otkazi elemenata nezavisni, dobija se sledeće:
1 2 3 1 2 3( ) ( ) ( ) ( ) ( ) ( )R P x P x P x P x P x P x= + + 1 2 3 1 2 3( ) ( ) ( ) ( ) ( ) ( )P x P x P x P x P x P x+ (6.27)
U opštem slučaju, ako je dato n elemenata od kojih treba da je ispravno barem r i ako su otkazi elemenata nezavisni događaji, pri čemu je p verovatnoća ispravnog funkcionisanja jednog elementa, primenom znanja o binomnoj raspodeli, dobija se sledeće:
( ) (1 )n
x n x
x r
nR P x r p p
x−
=
⎛ ⎞= ≥ = −⎜ ⎟
⎝ ⎠∑ (6.28)
gde je x broj ispravnih elemenata.
Ako je n=3 i r=2 dobija se izraz za pouzdanost u sledećem obliku:
33 2 2
2
3( 2) (1 ) 3 2x x
x
R P x p p p px
−
=
⎛ ⎞= ≥ = − = −⎜ ⎟
⎝ ⎠∑ (6.29)

Analiza pouzdanosti dvostacionarnih sistema
66
6.1.6. Pouzdanost u slučaju pripravnosti
Kod paralelne konfiguracije svi elementi se uključuju u momentu uključenja sistema i funkcionišu dok ne dođe do otkaza. Međutim, kada su elementi u pripravnosti (rezervi) oni se aktiviraju jedan po jedan samo u slučaju otkaza elementa koji je obezbeđivao funkcionisanje sistema. Na slici 6.5 prikazana su dva elementa od kojih je jedan u pripravnosti (rezervi).
A A’
P
B B’
a) b)
Slika 6.6 Sistem sa dva elementa u slucaju a) paralelne
konfiguracije i b)pripravnosti
Sistem sa aktivnim elementom A’ i elementom u pripravnosti B’ ponaša se nešto drugačije od sistema na slici 6.6 a). Na početku rada prekidač P, za koji se pretpostavlja da besprekorno funkcioniše, uključuje element A’. Za to vreme, element B’ nije aktivan i nalazi se u rezervi. U momentu kada prekidač „P“ oseti da je element A’ otkazao, on prebacuje vezu na element B’ i sistem nastavlja sa radom. Pretpostavlja se da je vreme prebacivanja veze sa elementa A’ na element B’ dovoljno kratko, kao i da B’ odmah počinje sa radom, tako da prebacivanje veze između ta dva elementa nema uticaja na funkcionisanje sistema. Kao primer može se uzeti sistem za napajanje električnom energijom kod koga se automatski po nestanku mrežnog napajanja uključuje motorni agregat. Ovakav sistem će otkazati ako element A’ otkaže, idealni prekidač P prebaci vezu na element B’ i zatim B’ otkaže. Pouzdanost u ovom slučaju je:
1 ( ' ') 1 ( ') ( '/ ')R P A B P A P B A= − ∩ = − (6.30)
Čini se da je u slučaju A=A’ i B=B’ pouzdanost u izrazu (6.30) jednaka kao kod paralelne veze. Međutim, treba primetiti da je značenje kondicionalnih verovatnoća ( / )P B A i
( '/ ')P B A sasvim različito. U slučaju paralelne konfiguracije ( / )P B A može da bude jednako ( )P B ako se pretpostavi da su otkazi nezavisni, ili se ovaj izraz može malo razlikovati ako
elementi A i B imaju međusobni uticaj. Element B startuje u isto vreme kad i element A, tj u t=0. U slučaju pripravnosti ( '/ ')P B A uvek je uslovna verovatnoća, jer element B’ ne otpočinje sa radom dok element A’ ne otkaže. Dakle, važno je uočiti da je ( '/ ')P B A funkcija vremena.

Analiza pouzdanosti dvostacionarnih sistema
67
Ako se uvedu sledeće pretpostavke: 1) prekidač besprekorno radi; 2) vreme uključenja u rad elementa u pripravnosti je dovoljno malo da se može zanemariti; 3) element u pripravnosti se odmah startuje kad se prekidač prebaci na njega; 4) intenziteti otkaza elemenata u pripravnosti ne zavise od vremena; onda se pouzdanost sistema sa slike 6.6b, za slučaj da su oba elementa jednaka može izračunati primenom Poasonove raspodele. Sistem sa slike 6.6b funkcioniše uspešno ako ima 0 ili 1 otkaz. Tako se dobija sledeći izraz za pouzdanost:
∑=
−−−−
+=+==1
0)1(
!i
i
eeeieR ααα ααα
α
(6.31)
gde je α očekivani broj otkaza. U opštem slucaju, kada je n identičnih elemenata od kojih je (n-1) elemenata u pripravnosti, pri čemu važe navedene pretpostavke, pouzdanost takvog sistema dobija se primenom izraza:
0 !
ii n
i
eRi
αα −=
=
= ∑ (6.32)
Kada je sistem sa elementima u pripravnosti, čiji otkazi zavise od vremena, kad su ti elementi različiti i kad prekidači ne funkcionišu besprekorno, onda se Poasonova raspodela ne može primeniti. U tom slučaju se mora razmatrati vreme i pronaći odgovarajuće funkcije gustine raspodele otkaza koje određuju ponašanje elemenata koji se nalaze u takvom sistemu.
6.2. Metode određivanja pouzdanosti vremenski zavisnih sistema
Do sada su razmatrani sistemi kod kojih pouzdanost sastavnih elemenata ne zavisi od vremena, tj. svi elementi rade u istom vremenskom intervalu. U ovoj glavi obrađuju se funkcionalane veze između pouzdanosti elemenata i vremena njihovog rada što znači da će određivanje pouzdanosti sistema rezultirati u funkciji pouzdanosti elemenata koja je zavisna od vremena. Teorija pouzdanosti vremenski zavisnih sistema je uopštenija, ali se neki rezultati iz prethodne glave mogu jednostavnom analogijom i proširivanjem primeniti i ovde.
6.2.1. Pouzdanost u slučaju redne konfiguracije elemenata
Poznato je da je najjednostavniji oblik povezivanja elemenata u sistemu predstavljen rednom konfiguracijom. Model redne konfiguracije predstavlja svaki sistem čije ispravno funkcionisanje zavisi od svakog elementa od koga se sastoji.
Neka je vreme do otkaza i-tog elemena prikazano slučajnom promenljivom Ti. U tom slučaju će pouzdanost sistema koji se sastoji iz n elemenata u rednoj vezi biti:
R( t ) =P( T1 > t ∩ T2 > t ∩...∩ Tn > t ) (6.33)
Pošto je pretpostavljena nezavisnost rada elemenata, dobija se:

Analiza pouzdanosti dvostacionarnih sistema
68
R( t ) = P( T1 > t ) P( T2 > t )...P( Tn > t ) (6.34)
Pošto je svaki član u gornjem proizvodu zapravo pouzdanost odgovarajućeg i-tog elementa, izraz za pouzdanost sistema u slučaju redne konfiguracije elemenata dobija oblik:
1
( ) ( )n
ii
R t R t=
= ∏ (6.35)
Logaritmovanjem leve i desne strane jednačine (6.35) dobija se :
1
ln ( ) ln ( )n
ii
R t R t=
= ∏ (6.36)
Na osnovu uopštene veze između intenziteta otkaza i pouzdanosti sistema prikazane eksponencijalnom zavisnosću u jednačini (2.13) dobija se sledeće:
[ln ( )]( ) d R ttdt
λ = − (6.37)
Diferencirajući jednačinu (6.28) po vremenu i množeći je sa -1 najpre se dobija:
1
[ln ( )][ln ( )] ni
i
d R td R tdt dt=
− = −∑ (6.38)
pa se korišćenjem jednačine (6.37) dobija konačan izraz za funkciju intenziteta otkaza sistema sa elementima u rednoj vezi:
1( ) ( )
n
ii
t tλ λ=
= ∑ (6.39)
Ovde se vidi da je funkcija intenziteta otkaza sistema sa elementima u rednoj vezi jednaka zbiru intenziteta otkaza elemenata koji taj sistem čine, pod pretpostavkom nezavisnosti otkaza pojedinih elemenata i bez obzira na oblik funkcija gustine otkaza elemenata.
U slučaju da se sistem sastoji on n elemenata u rednoj vezi, koji imaju konstantne intenzitete oktaza λi (vreme do otkaza svakog elementa ima eksponencijalnu raspodelu), intenzitet otkaza sistema λ ce takođe biti konstantna vrednost. U tom slučaju funkcija pouzdanosti sistema biće:
1( )
n
ii
t
R t eλ
=
− ∑= (6.40)
Izraz za očekivano vreme bezotkaznog rada, tj, srednje vreme između otkaza u slučaju popravljivih sistema je:

Analiza pouzdanosti dvostacionarnih sistema
69
1
1 1n
ii
MTBFλλ
=
= =
∑ (6.41)
6.2.2. Pouzdanost u slučaju paralelne konfiguracije elemenata
Poznato je da je za ispravno funkcionisanje sistema koji se sastoji od n paralelno povezanih elemenata dobvoljno da ispravno funkcioniše bar jedan element. Pri tom se uvodi pretpostavka da svi elementi otpočinju sa radom u momentu uključivanja sistema i funkcionišu do kraja rada sistema ili do otkaza.
Kao što je već poznato, kod paralelne veze je pogodnije najpre napisati izraz za nepouzdanost:
F( t ) = P( T1 ≤ t ∩ T2 ≤ t ∩...∩ Tn ≤ t ), t ≥ 0 (6.42)
Uvođenjem pretpostavke o nezavisnosti pojave otkaza može se napisati:
F( t ) = P( T1 ≤ t ) P( T2 ≤ t ) ... P( Tn ≤ t ) (6.43)
Nezavisnost označava da se verovatnoća otkaza ispravnih elemenata neće promeniti posle otkaza drugih elemenata.
Pošto su članovi u proizvodu na desnoj strani jednačine (6.43) zapravno nepouzdanosti pojedinih elemenata sistema, jednačina (6.43) prelazi u:
1
( ) [1 ( )]n
ii
F t R t=
= −∏ (6.44)
pa se oduzimanjem nepouzdanosti od 1 dobija pouzdanost sistema u slučaju paralelne konfiguracije elemenata:
1
( ) 1 [1 ( )]n
ii
R t R t=
= − −∏ (6.45)
U slučaju da je sistem sačinjen od n elemenata koji imaju konstantne intenzitete otkaza (vreme do otkaza svakog elementa ima eksponencijalnu raspodelu), određivanje pouzdanosti takvog sistema se pojednostavljuje. Jednačina (6.45) tada se može napisati u sledećem obliku:
1
( ) 1 (1 )i
nt
i
R t e λ−
=
= − −∏ (6.46)

Analiza pouzdanosti dvostacionarnih sistema
70
Primenjujući jednačinu (6.46) na slučaj kad se sistem sastoji od dva elementa sa intenzitetima otkaza λ1 i λ2 dobija se:
1 2 1 2( )( ) t t tR t e e eλ λ λ λ− − − += + − (6.47)
a u slučaju da je λ1=λ2=λ (identični elementi):
R(t)=2e-λt-e-2λt (6.48)
Korišćenjem jednačine (6.48) u izrazu za intenzitet otkaza (2.10) može se proveriti da intenzitet otkaza sistema sa elementima u paralelnoj konfiguraciji nije konstantna vrednost već je funkcija vremena, bez obzira na to što elementi imaju konstantne intenzitete otkaza. Međutim , očekivano vreme bezotkaznog rada može se dobiti integracijom po vremenu od 0 do beskonačnosti što je predstavljeno jednačinom (2.19). Za slučaj da postoje dva elementa sa konstantnim intenzitetima otkaza λ1 i λ2, ova integracija je jednostavna pa se dobija sledeće:
1 2 1 2( )
0
[ ]t t tsrT e e e dtλ λ λ λ
∞− − − += + −∫ (6.49)
odnosno:
1 2 1 2
1 1 1srT
λ λ λ λ= + −
+ (6.50)
Ako je λ1=λ2=λ (identični elementi) dobija se:
32srTλ
= (6.51)
U opštem slučaju, očekivano vreme bezotkaznog rada sistema, koji se sastoji od n identičnih elemenata sa intenzitetom otkaza λ, biće:
1
1 1n
sri
Tiλ =
= ∑ (6.52)
Ako se u jednačinama (6.12) i (6.15) koje se odnose na redno – paralelnu, odnosno na paralelno – rednu vezu, kod vremenski nezavisnih sistema umesto R i p stavi R(t) i p(t) dobija se vremenski zavisna funkcija pouzdanosti datih konfiguracija. Isto tako, ako je za uspešno funkcionisanje sistema neophodno da od n identičnih elemenata u paralelnoj konfiguraciji bude ispravno najmanje r elemenata , pouzdanost takvog sistema dobija se primenom jednačine (6.28), gde umesto R i p treba staviti R(t) i p(t).

Analiza pouzdanosti dvostacionarnih sistema
71
6.2.3. Pouzdanost u slučaju pripravnosti
Na slici 6.7 prikazan je sistem sa elementima u pripravnosti pri čemu samo jedan element funkcioniše, a n-1 se nalazi u pripravnosti. U sklopu sistema je i prekidač P čiji je zadatak da po otkazu elementa koji funkcioniše uključi sledeći element. Ako i taj element otkaže uključuje se sledeći i tako dalje redom. Za razliku od razmatranja u odeljku 6.1.5 ovde će se uzeti u obzir vremenske zavisnosti pouzdanosti svakog od elemenata koji čine sistem. Razmatranje je podeljeno na slučaj kad prekidač idealno funkcioniše i kada prekidač ima neku verovatnoću otkaza (funkcija gustine verovatnoće otkaza).
1
P 2
n
Slika 6.7 Sistem sa jednim aktivnim elementom i (n-1) elementom u pripravnosti
Neka je sa xi označen događaj uspešnog funkcionisanja i-tog elementa, a sa ix događaj otkaza i-tog elementa. Slučajno promenljiva veličina, koja označava vreme otkaza i-tog elemnta,označena je sa Ti, a njena funkcija gustine biće fi (t).
1. Slučaj kada je prekidač idealan
U ovom poglavlju posmatraće se pojednostavljen slucaj kada prekidač besprekorno funkcioniše, tj. kada ne može da otkaže. Takođe se pretpostavlja da elementi u pripravnosti ne mogu da otkažu u stanju mirovanja. Razmatraće se pouzdanost sistema koji se sastoji od elementa 1 u stanju funkcionisanja i elementa 2 u stanju pripravnosti. U tom slučaju, sistem će biti ispravan u određenom trenutku vremena t ukoliko ili a) element 1 radi do tog vremena t, ili b) element 1 otkaže u trenutku vremena T1<t, a element 2 radi od vremena T1 do t. Ove varijnate uspešnog funkcionisanja sistema prikazane su na slici 6.8.
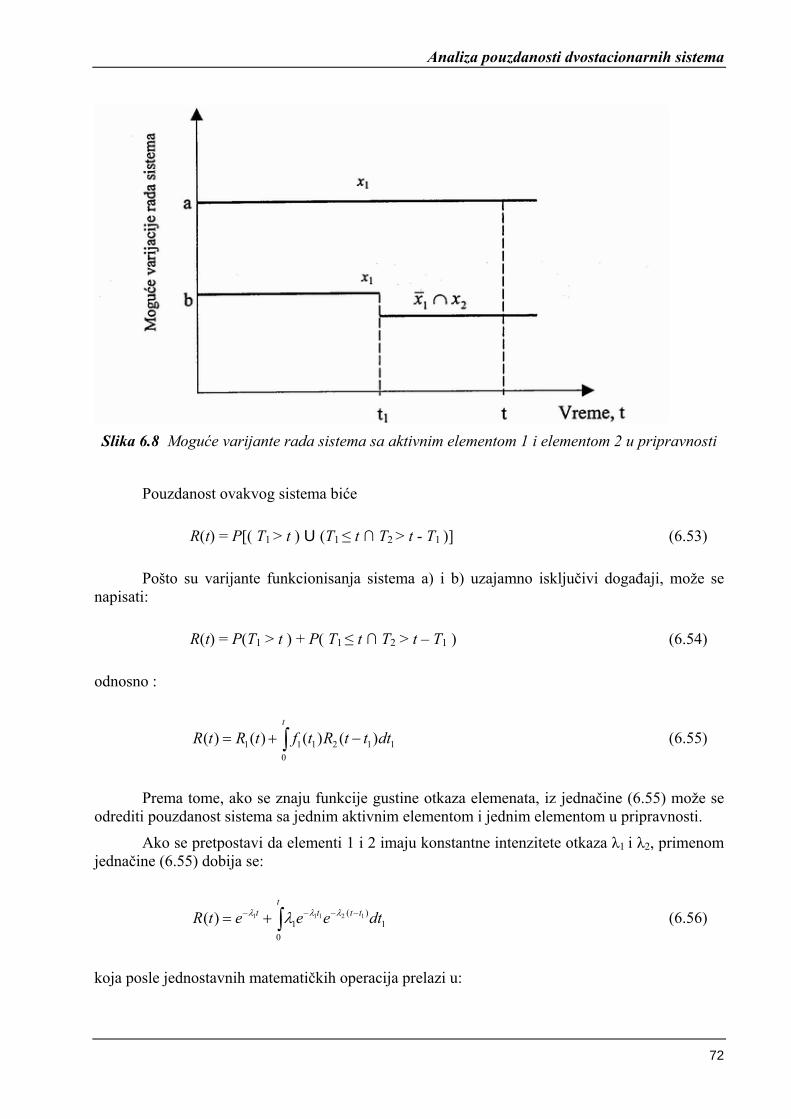
Analiza pouzdanosti dvostacionarnih sistema
72
Slika 6.8 Moguće varijante rada sistema sa aktivnim elementom 1 i elementom 2 u pripravnosti
Pouzdanost ovakvog sistema biće
R(t) = P[( T1 > t ) U (T1 ≤ t ∩ T2 > t - T1 )] (6.53)
Pošto su varijante funkcionisanja sistema a) i b) uzajamno isključivi događaji, može se napisati:
R(t) = P(T1 > t ) + P( T1 ≤ t ∩ T2 > t – T1 ) (6.54)
odnosno :
1 1 1 2 1 10
( ) ( ) ( ) ( )t
R t R t f t R t t dt= + −∫ (6.55)
Prema tome, ako se znaju funkcije gustine otkaza elemenata, iz jednačine (6.55) može se odrediti pouzdanost sistema sa jednim aktivnim elementom i jednim elementom u pripravnosti.
Ako se pretpostavi da elementi 1 i 2 imaju konstantne intenzitete otkaza λ1 i λ2, primenom jednačine (6.55) dobija se:
1 1 1 2 1( )1 1
0
( )t
t t t tR t e e e dtλ λ λλ− − − −= + ∫ (6.56)
koja posle jednostavnih matematičkih operacija prelazi u:

Analiza pouzdanosti dvostacionarnih sistema
73
1 2 11
1 2
( ) ( )t t tR t e e eλ λ λλλ λ
− − −= + −−
(6.57)
Kada oba elementa imaju isti intenzitet otkaza λ1 = λ2 =λ, ponovo se primenjuje jednačina (6.55), pa se dobija:
1 1 1( )1
0
( )t
t t t tR t e e e dtλ λ λλ− − − −= + ∫ (6.58)
odnosno:
( ) (1 )tR t e tλ λ−= + (6.59)
Pouzdanost sistema, koji se sastoji od aktivnog elemetna 1 i elementa 2 i 3 u pripravnosti, može se odrediti sličnim razmatranjem. Sve moguće varijante uspešnog funkcionisanja ovakvog sistema prikazane su na slici 6.9.
Pouzdanost sistema će biti:
R(t) = P[(T1>t) U (T1≤t ∩ T2>t – T1) U (T1≤ t ∩ T2≤ t–T1 ∩ T3 > t – T1 – T2)] (6.60)
Kako su varijante a, b i c međusobno isključivi događaji, može se napisati:
R(t) = P[( T1 > t) + P( T1≤t ∩ T2>t–T1) + P (T1 ≤ t ∩ T2 ≤ t – T1 ∩ T3 > t – T1 – T2) (6.61)
odnosno:
1
1 1 1 2 1 1 1 1 2 3 1 2 2 10 0 0
( ) ( ) ( ) ( ) ( ) ( )t tt t
R t R t f t R t t dt f t f R t t t dt dt−
= + − + − −∫ ∫ ∫ (6.62)

Analiza pouzdanosti dvostacionarnih sistema
74
Slika 6.9 Moguće varijante rada sistema sa aktivnim elementom 1 i elemetima 2 i 3 u pripravnosti
Može se primetiti da su prva dva člana jednačine (6.53) identična sa jednačinom (6.55) što je i logično jer su sve varijante rada sistema sa jednim aktivnim elementom i jednim elementom u pripravnosti sadržane u ovom sistemu.
Ako se razmotri specijalan slučaj kada su sva tri elementa identična i imaju konstantan intenzitet otkaza λ, pouzdanost sistema se primenom jednačine (6.53) može dobiti u sledećem obliku:
2( )( ) 12
t tR t e tλ λλ− ⎡ ⎤= + +⎢ ⎥
⎦⎣ (6.63)
Na osnovu dosadašnjih razmatranja analogno se mogu napisati jednačine i za sistem koji se sastoji od aktivnog elementa 1 i elemenata 2,3 i 4 u pripravnosti i tako dalje redom za sve složenije i složenije sisteme. U opštem obliku, pouzdanost sistema koji se sastoji od n elemenata sa konstantnim intenzitetom otkaza λ, pri čemu je jedan element aktivan a (n-1) u pripravnosti, data je jednačinom:
( ) ( ) ( ) ( ) 1110
)1()1()( dtttRtftRtR n
t
nnn −+= ∫ −− (6.64)
gde je:
( )tR n)( - pouzdanost sistema od n elemenata (n-1 elemenat u pripravnosti)
( )tR n )1( − - pouzdanost sistema od n-1 elemenata (n-2 elemenata u pripravnosti)
)1( −nf - funkcija gustine raspodele za sistem od n-1 elemenata

Analiza pouzdanosti dvostacionarnih sistema
75
( )tRn - pouzdanost n-tog elementa.
U slučaju n identičnih elemanata dobija se
1
0
( )( )!
int
i
tR t ei
λ λ−−
=
= ∑ (6.65)
2. Slučaj kad prekidač nije idealan
U prethodnom poglavlju razmatran je slučaj kada prekidač idealno obavlja svoju funkciju.
Međutim, u praktičnim situacijama verovatnoća otkaza prekidača ima značajan uticaj na pouzdanost sistema. Otkazi prekidača mogu da se jave u više oblika pri čemu oni zavise od mehanizma uključivanja i od samog sistema. U ovom poglavlju razmatraće se dve mogućnosti otkaza prekidača.
Prva mogućnost otkaza prekidača je situacija kada on ne izvrši uključivanje elemenata u pripravnosti u momentu kada se to zahteva. Ako sa pp obelezimo verovatnoću da će prekidač uključiti element u pripravnosti onda kada se to zahteva, pouzdanost sistema sa aktivnim elementom 1 i elementom 2 u pripravnosti, analogno sa jednačinom (6.55) biće:
1 1 1 2 1 10
( ) ( ) ( ) ( )t
pR t R t p f t R t t dt= + −∫ (6.66)
Isto tako, primenom jednačine (6.62) može se dobiti pouzdanost sistema sa aktvinim elementom 1 i elementima 2 i 3 u pripravnosti.:
12
1 1 1 2 1 1 1 1 2 2 3 1 2 2 10 0 0
( ) ( ) ( ) ( ) ( ) ( ) ( )t tt t
p pR t R t p f t R t t dt p f t f t R t t t dt dt−
= + − + − −∫ ∫ ∫
(6.67)
Druga mogućnost otkaza prekidača je situacija kada je prekidač kompleksan uređaj čija je funkcija gustine otkaza fp(t) i pouzdanost Rp(t). Prema tome, dozvoljava se mogućnost da prekidač može da otkaže pre nego što se zahteva od njega da uključi element u pripravnosti. U tom slučaju, pouzdanost sistema sa aktivnim elementom 1 i elementom 2 u pripravnosti biće:
R(t) = P[( T1 > t ) U (T1 ≤ t ∩ Tp > T1 ∩ T2 > t – T1)] (6.68)
odnosno:
R(t) = P( T1 > t) + P( T1 ≤ t ∩ Tp > T1 ∩ T2 > t – T1 ) (6.69)
gde je Tp slučajna promenljiva veličina koja označava vreme do otkaza prekidača. U integralnoj formi, jednačina (6.69) dobija sledeći oblik:

Analiza pouzdanosti dvostacionarnih sistema
76
1 1 1 1 2 1 10
( ) ( ) ( ) ( ) ( )t
pR t R t f t R t R t t dt= + −∫ (6.70)
Ako se pretpostavi da oba elementa imaju konstantne intenzitete otkaza i da prekidač ima konstantan intenzitet otkaza λp, onda se primenom jednačina (6.70) i posle jednostavnih matematičkih operacija dobija izraz za pouzdanost takvog sistema:
( ) [1 (1 )]ptt
p
R t e e λλ λλ
−−= + − (6.71)
Sličnim razmatranjem može se odrediti pouzdanost sistema koji se sastoji od aktivnog elementa 1 i elementa 2 i 3 u pripravnosti. Analogno sa jednačinom (6.61) može se napisati da je :
R( t ) = P(T1 > t ) + P( T1 ≤ t ∩ Tp > T1 ∩ T2 > t - T1 ) +
+ P( T1 ≤ t ∩ T2 < t- T1 ∩ Tp > T1 + T2 ∩ T3 > t- T1 –T2 ) (6.72)
Odnosno u integralnoj formi:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) 12213210
2210 0
11121111
1
dtdttttRttRtftfdtttRtRtftRtR p
ttt t
p −−++−+= ∫∫ ∫−
(6.73)
U praktičnim situacijama sreću se i drugi oblici otkaza prekidača. Na primer, prekidač može da otkaže tako što isključuje aktivni element, kada je on ispravan. Svaka situacija mora pojedinačno da se analizira i na osnovu toga da se odredi izraz za izračunavanje pouzdanosti za taj slučaj.
U nekim slučajevima se može uzeti u obizr mogućnost da elementi u pripravnosti mogu da otkažu još pre nego što se zahteva njihovo uključivanje. Ako postoji ta mogućnost, na primer, kod sistema sa jednim aktivnim elementom i elementom 2 u pripravnosti, izraz za određivanje pouzdanosti će analogno sa jednačinom (6.70) biti:
( ) ( ) ( ) ( ) ( ) ( ) 11312110
11 dtttRtRtRtftRtR p
t
−+= ∫ (6.74)

Analiza pouzdanosti sistema sa višestacionarnim elementima
77
7. ANALIZA POUZDANOSTI SISTEMA SA VIŠESTACIONARNIM ELEMENTIMA
Do sada su razmatrani slučajevi kada postoje samo dva isključiva događaja – element funkcioniše uspešno, ili neuspešno, tj. element je ili dobar ili loš. Međutim, mnogi elementi mogu imati više stanja, pa se tada moraju formulisati drugačiji izrazi za pouzdanost sistema koji objedinjuju te elemente. Na primer, jedan otpornik može ispravno da funkcioniše, da otkaže zbog kratkog spoja ili zbog prekida u kolu. Tranzistor može da ima i više od tri stanja, ako se svi oblici otkaza uzmu u obzir. Ovakvi elementi nazivaju se multistacionarni elementi. Svi oblici otkaza takvog elementa ne znace neminovno otkaz sistema, već se svako stanje elementa mora proceniti u odnosu na konfiguraciju svih elemenata i u odnosu na korišćenje.
Jedna poluprovodnička dioda funkcioniše tako što propušta struju u jednom smeru, a ne propušta je u povratnom smeru, što se može uporediti sa ulogom koju ima kontrolni ventil u nekom toku fluida. Kada ispravno funkcioniše, otpornost u željenom smeru je teoretski jednaka nuli, a u povratnom smeru jednaka je beskonačnosti. Dioda može da otkaze na dva načina: može da napravi prekid, kada je otpornost u oba pravca jednaka beskonačnosti, ili može napraviti kratak spoj, kada je otpornost jednaka nuli u oba smera.Prema tome, dioda može da se nalazi u tri stanja : ispravna, prekid i kratak spoj. Ako se sa x obeleži događaj da je dioda dobra, a sa px da je dioda otkazala usled prekida, a sa kx da je dioda otkazala usled kratkog spoja, onda su to tri uzajamno isključiva događaja, pa se može napisati da je:
( ) ( ) ( ) ( ) 1p k p kP x x x P x P x P x+ + = + + = (7.1)
Pouzdanost jedne takve diode biće:
( ) 1 ( ) 1 [ ( ) ( )]p k p kR P x P x x P x P x= = − + = − + (7.2)
Takođe se i kondenzator može posmatrati kao trostacionarani elemnt jer i on ili radi ispravno, ili ako otkazuje, otkazuje usled kratkog spoja ili usled prekida. Zato se sve ono što je rečeno do sada za diodu kao i relacije (7.1) i (7.2) može primeniti i na kondenzator.
U sledećem tekstu razmatra se izračunavanje pouzdanosti sistema kada su date razne konfiguracije elemenata, pri čemu svaki element može da bude u tri stanja. Takođe će biti pomenut slučaj elemenata koji mogu imati više od tri stanja.
Treba napomenuti da je logika za računanje pouzdanosti i za kondenzator i za diodu kao trostacionarne elemente ista. Zato je u poglavljima 1, 2, 3 i 4 svejedno da li su nacrtane veze sa diodama ili kondenzatorima jer sve relacije ostaju iste.
1. Redna konfiguracija trostacionarnih elemenata
Da bi se odredila pouzdanost sistema koji se sastoji iz redno vezanih trostacionarnih
elemenata potrebno je definisati otkaz sistema. Sistem na slici 7.1 otkazaće : 1) ako i element x1 i

Analiza pouzdanosti sistema sa višestacionarnim elementima
78
element x2 naprave kratak spoj i 2) ako ili element x1 ili element x2 naprave prekid. Neka je obeležen sa 1px događaj da je element x1 napravio prekid, a sa 1kx događaj da je element x1 napravio kratak spoj i tako dalje po toj logici i za element x2. Pošto su događaji 1) i 2) isključivi, sledi:
x1 x2
Slika 7.1 Dve redno vezane diode
)()( 2121 ppkk xxPxxPF ∪+∩= (7.3)
Pretpostavlja se da su otkazi elemenata nezavisni. Tada je verovatnoća da će i element x1 i element x2 napraviti kratak spoj, tj. presek ovih događaja, jednaka:
1 2 1 2( ) ( ) ( )k k k kP x x P x P x∩ = (7.4a)
Verovatnoća da će ili element x1 ili element x2 napraviti prekid, tj. unija ovih događaja je jednaka:
=−+=∪ )()()()()( 212121 pppppp xPxPxPxPxxP
1 2 1 21 ( ) 1 ( ) ( )p p p pP x x P x P x= − ∩ = − =
1 21 [1 ( )][1 ( )]p pP x P x= − − − (7.4b)
Gde je iskorisćena činjenica da se verovatnoća P(x1p U x2p ) može dobiti oduzimanjem od 1 verovatnoće da ni element x1 ni element x2 neće otkazati zbog prekida. Sabiranjem jednačina (7.4a) i (7.4b) i oduzimanjem od 1 dobila je izraz za pouzdanost sistema:
1 2 1 21 [1 ( )][1 ( )] ( ) ( )p p k kR F P x P x P x P x= − = − − − (7.5)
Ovaj izraz se lako može uopštiti za slučaj n redno vezanih elemenata, pa se dobija:
1 1
[1 ( )] ( )n n
ip iki i
R P x P x= =
= − −∏ ∏ (7.6)
Ako su svi elementi identinčni, pri čemu je P( x1p ) = qp i P( xik ) = qk, jednačina (7.6) preći će u:

Analiza pouzdanosti sistema sa višestacionarnim elementima
79
R = ( 1 – qp ) n - qkn (7.7)
gde je qp verovatnoća da će element otkazati zbog prekida, a qk verovatnoća da će element otkazati zbog kratkog spoja.
Interesantno je još napomenuti da je moguće odrediti optimalni broj ovih elemenata u rednoj vezi, diferenciranjem izraza (7.7) po n.
0
lnlnln(1 )
1ln
k
p
p
k
n qq
−=
− (7.8)
2. Paralelna konfiguracija trostacionarnih elemenata
Kada je data paralelna konfiguracija trostacionaranih elemenata kakva je prikazana na slici 7.2 sistem će otkazati: 1) ako bilo koji od elemenata napravi kratak spoj(događaj A) i 2) ako svi elementi naprave prekid (događaj B). Na osnovu ovih obeležavanja može se napisati sledecće:
1 2 ...k k nkA x x x= ∪ ∪ ∪ (7.9)
odnosno:
1 2 ...p p npB x x x= ∩ ∩ ∩ (7.10)
Prema tome P(A) je verovatnoća da će makar jedan element u paraleli naraviti kratak spoj dok je P(B) verovatnoća da će svi elementi napravati prekid. Zbir ove dve verovatnoće predstavlja verovatnoću otkaza sistema odnosno njegovu nepouzdanost. Sada se može pisati:
1 2 1 2( ) ( ... ) 1 ( ... )k k nk k k nkP A P x x x P x x x= ∪ ∪ ∪ = − ∩ ∩ ∩ =
1 2
1 2
1 ( ) ( )... ( )1 [1 ( )][1 ( )]...[1 ( )]
k k nk
k k nk
P x P x P xP x P x P x
= − == − − − −
(7.11)
odnosno:
1 2 1 2( ) ( ... ) ( ) ( )... ( )p p np p p npP B P x x x P x P x P x= ∩ ∩ ∩ = (7.12)

Analiza pouzdanosti sistema sa višestacionarnim elementima
80
x1
x2
xn
Slika 7.2 Paralelna konfiguracija kondenzatora
Sabiranjem P(A) i P(B) i oduzimanjem od 1, dobija se pouzdanost sistema u opštem slučaju:
1 1
[1 ( )] ( )n n
ik ipi i
R P x P x= =
= − −∏ ∏ (7.13)
Kada su svi elementi identični pri čemu je qp i qk već definisano, može se formula za pouzdanost pojednostaviti:
R = ( 1 – qk )n - qpn (7.14)
Takođe se i ovde može odrediti optimalni broj n koji daje najveću pouzdanost i to diferenciranjem poslednjeg izraza po n i izjednačavanjem sa nulom. Tako se dobija:
0
lnln
ln(1 )1ln
p
k
k
p
qqn q
q
−=
− (7.15)
3. Redno paralelna konfiguracija trostacionarnih elemenata Na slici 7.3 je prikazana redno – paralelna konfiguracija dve na red vezane konfiguracije
sa po n paralelno vezanih elemenata. Ovako definisani sistem će otkazati: 1)ako grupa koja se sastoji od elemenata x11, x21, ...,xn1 ili grupa koja se sastoji od elemenata x12, x22, ..., xn2 otkažu zbog prekida (događaj A) ili kratkog spoja (događaj B).

Analiza pouzdanosti sistema sa višestacionarnim elementima
81
x11 x21
x21 x22
xn1 xn2
Slika 7.3 Redno paralelna konfiguracija kondenzatora
Neka su sa 11 21 1, ,...,p p n px x x i 12 22 2, ,...,p p n px x x obeleženi otkazi elemenata zbog prekida i sa
11 21 1, ,...,k k n kx x x i 12 22 2, ,...,k k n kx x x otkazi elemenata zbog kratkog spoja. Pretpostavlja se da su otkazi elemenata nezavisni. Na osnovu dosadašnjih definicija izrazi za događaje A i B bice:
11 21 1 12 22 2( ... ) ( ... )p p n p p p n pA x x x x x x= ∩ ∩ ∩ ∪ ∩ ∩ ∩ (7.16)
odnosno:
11 21 1 12 22 2( ... ) ( ... )k k n k k k n kB x x x x x x= ∪ ∪ ∪ ∩ ∪ ∪ ∪ (7.17)
Sada je verovatnoca da će ili jedna ili druga grupa otkazati usled prekida jednaka:
11 21 1 12 22 2( ) [( ... ) ( ... )]p p n p p p n pP A P x x x x x x= ∩ ∩ ∩ ∪ ∩ ∩ ∩ =
11 21 1 12 22 21 [( ... ) ( ... )]p p n p p p n pP x x x x x x= − ∩ ∩ ∩ ∩ ∩ ∩ ∩ =
11 21 1 12 22 21 [1 ( ) ( )... ( )][1 ( ) ( )... ( )]p p n p p p n pP x P x P x P x P x P x= − − − (7.18)
Verovatnoća da će i jedna i druga grupa otkazati zbog kratkog spoja je jednaka:
11 1 12 2( ) {1 [1 ( )]...[1 ( )]}{1 [1 ( )]...[1 ( )]}k n k k n kP B P x P x P x P x= − − − − − − (7.19)
Sabiranjem poslednje dve jednačine i oduzimanjem od 1 dobija se izraz za pouzdanost sistema sa slike 7.3:

Analiza pouzdanosti sistema sa višestacionarnim elementima
82
2 2
1 1 1 1
[1 ( )] {1 [1 ( )]}n n
ijp ijkj i j i
R P x P x= = = =
= − − − −∏ ∏ ∏ ∏ (7.20)
Uopštavanjem ove jednačine dobija se izraz za pouzdanost sistema koji se sastoji od n grupa sa po m elemenata u svakoj grupi:
1 1 1 1
[1 ( )] {1 [1 ( )]}n m n m
ijp ijkj i j i
R P x P x= = = =
= − − − −∏ ∏ ∏ ∏ (7.21)
gde je i =1,2,3,...,m broj elemenata u grupi ( do sada smo taj broj označavali sa n), j = 1,2,3,..., n broj grupa.
Ako su svi elementi jednaki pri čemu je P( xijp ) = qp i P ( xijk ) = qk, poslednja jednačina prelazi u :
R = ( 1- qpm)n – [ 1 – ( 1- qk)m]n (7.22)
Optimalno m i n može se naći parcijalnim diferenciranjem (7.22) po m i n, i izjednačavanjem ovih izraza sa nulom.
Paralelno redna konfiguracija trostacionarnih elemenata
Sistem na slici 7.4 sastoji se od dva paralelno vezana niza od kojih svaki ima po n trostacionarnih elemenata. Ovo je, dakle, jedan slučaj paralelno-redne konfiguracije.
x11 x12 x1n
x21 x22 x2n
Slika 7.4 Paralelno redna konfiguracija dioda
Ovaj sistem će otkazati: 1) ako i gornji i donji pravac otkažu zbog prekida (događaj C) i 2) ako ili gornji ili donji pravac otkažu zbog kratkog spoja (događaj D). Zadržana su ista obeležavanja kao i u slučaju redno-paralelne konfiguracije i pretpostavlja se da su otkazi elemenata nezavisni. Prema navedenim definicijama izrazi za događaje C i D biće:
11 12 1 21 22 2( ... ) ( ... )p p np p p npC x x x x x x= ∪ ∪ ∪ ∩ ∪ ∪ ∪ (7.23)

Analiza pouzdanosti sistema sa višestacionarnim elementima
83
odnosno:
11 12 1 21 22 2( ... ) ( ... )k k nk k k nkD x x x x x x= ∩ ∩ ∩ ∪ ∩ ∩ ∩ (7.24)
Sada će verovatnoća da će i jedan i drugi pravac otkazati zbog prekida biti jednaka:
11 12 1 21 22 2 P( ) [( ... ) ( ... )]p p np p p npC P x x x x x x= ∪ ∪ ∪ ∩ ∪ ∪ ∪ =
11 12 1 21 22 2=P( ... ) ( ... )p p np p p npx x x P x x x∪ ∪ ∪ ∪ ∪ ∪ =g
11 1 21 2{1 [1 ( )]...[1 ( )]}{1 [1 ( )]...[1 ( )]}p np p npP x P x P x P x= − − − − − − (7.25)
Verovatnoća da ce ili jedan ili drugi pravac otkazati zbog kratkog spoja biće jednaka:
11 12 1 21 22 2( ) [( ... ) ( ... )]k k nk k k nkP D P x x x x x x= ∩ ∩ ∩ ∪ ∩ ∩ ∩ =
11 12 1 21 22 21 [( ... ) ( ... )]k k nk k k nkP x x x x x x= − ∩ ∩ ∩ ∩ ∩ ∩ ∩ =
11 12 1 21 22 21 ( ... ) ( ... )k k nk k k nkP x x x x x x= − ∩ ∩ ∩ ∩ ∩ ∩g =
11 12 1 21 22 21 [1 ( ... )][1 ( ... )]k k nk k k nkP x x x P x x x= − − ∩ ∩ ∩ − ∩ ∩ ∩ =
= 11 12 1 21 22 21 [1 ( ) ( )... ( )][1 ( ) ( )... ( )]k k nk k k nkP x P x P x P x P x P x− − − (7.26)
Sabiranjem poslednje dve jednačine i oduzimanjem od jedan dobija se izraz za pouzdanost sistema sa slike (7.4):
2 2
1 1 1 1
[1 ( )] {1 [1 ( )]}n n
ijk ijpi j i j
R P x P x= = = =
= − − − −∏ ∏ ∏ ∏ (7.27)
Ova jednačina se može uopštiti za slučaj kada je dat sistem koji se sastoji od m pravaca sa po n elemenata u svakom pravcu pa se dobija:
1 1 1 1
[1 ( )] {1 [1 ( )]}m n m n
ijk ijpi j i j
R P x P x= = = =
= − − − −∏ ∏ ∏ ∏ (7.28)
Kada su svi elementi jednaki pri čemu je P( ijkx ) = qk i P( ijpx ) = qp, dobija se
R = ( 1- qkn)m – [ 1 – ( 1- qp)n]m (7.29)
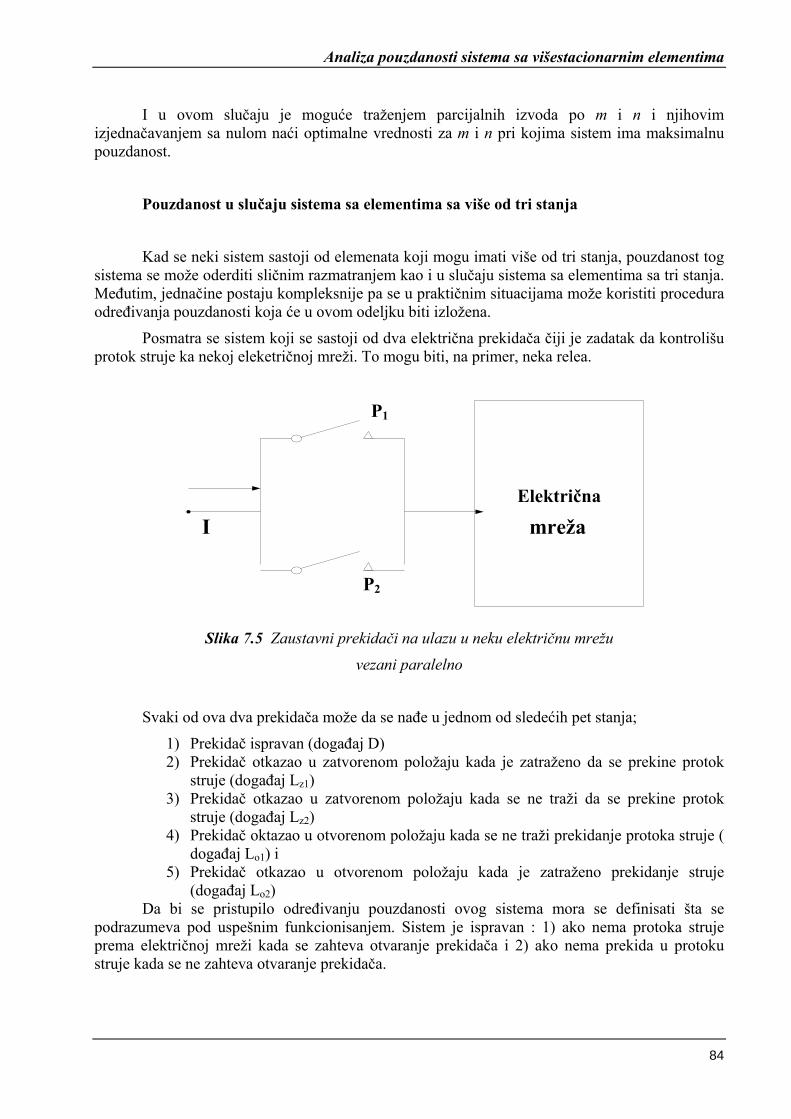
Analiza pouzdanosti sistema sa višestacionarnim elementima
84
I u ovom slučaju je moguće traženjem parcijalnih izvoda po m i n i njihovim izjednačavanjem sa nulom naći optimalne vrednosti za m i n pri kojima sistem ima maksimalnu pouzdanost.
Pouzdanost u slučaju sistema sa elementima sa više od tri stanja
Kad se neki sistem sastoji od elemenata koji mogu imati više od tri stanja, pouzdanost tog sistema se može oderditi sličnim razmatranjem kao i u slučaju sistema sa elementima sa tri stanja. Međutim, jednačine postaju kompleksnije pa se u praktičnim situacijama može koristiti procedura određivanja pouzdanosti koja će u ovom odeljku biti izložena.
Posmatra se sistem koji se sastoji od dva električna prekidača čiji je zadatak da kontrolišu protok struje ka nekoj eleketričnoj mreži. To mogu biti, na primer, neka relea.
P1
Električna
I mreža
P2
Slika 7.5 Zaustavni prekidači na ulazu u neku električnu mrežu
vezani paralelno
Svaki od ova dva prekidača može da se nađe u jednom od sledećih pet stanja;
1) Prekidač ispravan (događaj D) 2) Prekidač otkazao u zatvorenom položaju kada je zatraženo da se prekine protok
struje (događaj Lz1) 3) Prekidač otkazao u zatvorenom položaju kada se ne traži da se prekine protok
struje (događaj Lz2) 4) Prekidač oktazao u otvorenom položaju kada se ne traži prekidanje protoka struje (
događaj Lo1) i 5) Prekidač otkazao u otvorenom položaju kada je zatraženo prekidanje struje
(događaj Lo2) Da bi se pristupilo određivanju pouzdanosti ovog sistema mora se definisati šta se
podrazumeva pod uspešnim funkcionisanjem. Sistem je ispravan : 1) ako nema protoka struje prema električnoj mreži kada se zahteva otvaranje prekidača i 2) ako nema prekida u protoku struje kada se ne zahteva otvaranje prekidača.

Analiza pouzdanosti sistema sa višestacionarnim elementima
85
Tabela 7.1 Određivanje pouzdanosti sistema na slici 7.5
Elementi i njihova stanja Broj
Varijacija 1 2
Sistem
dobar / loš
Verovatnoća uspešnog
funkcionisanja sistema
1 D D D R1R2 2 D LO1 D R1Q2O1 3 D LO2 D R1Q2O2 4 D LZ1 L 5 D LZ2 L 6 LO1 D D Q1O1R2 7 LO1 LO1 L 8 LO1 LO2 D Q1O1Q2O2 9 LO1 LZ1 L
10 LO1 LZ2 L 11 LO2 D D R2Q2O2 12 LO2 LO1 D Q1O2Q2O1 13 LO2 LO1 D Q1O2Q2O2 14 LO2 LZ1 L 15 LZ1 LZ2 L 16 LZ1 D L 17 LZ1 LO1 L 18 LZ1 LO1 L 19 LZ1 LZ1 L 20 LZ2 LZ2 L 21 LZ2 D L 22 LZ2 LO1 L 23 LZ2 LO1 L 24 LZ2 LZ1 L
25 LZ2 LZ2 L
Sistem na slici 7.5 imaće ukupno V = 52 = 25 mogućih kombinacija funkcionisanja elemenata u njemu. Radi lakšeg manipulisanja, korisno je izračunavanje prikazati tabelarno (tabela 7.1)
U koloni „ Elementi i njihova stanja“ upisu se svih 25 mogućih varijanti stanja prekidača 1 i 2, a u sledećoj koloni se unese da li će sistem uspešno funkcionisati (D) ili će otkazati (L) za datu kombinaciju stanja prekidača. U poslednjoj koloni se utvrđuju verovatnoće uspešnog funkcionisanja sistema za datu kombinaciju prekidača. Pouzdanost sistema biće jednaka zbiru svih verovatnoća uspešnog funkcionisanja sistema za određenu kombinaciju stanja prekidača. Ako su sa R1 i R2 obeležene pouzdanosti prekidača 1 i 2, a sa Q101 i Q201 verovatnoća otkaza prekidača u otvorenom položaju kada se ne traži prekid protoka struja, sa Q102 i Q202 verovatnoća otkaza prekidača 1 i 2 u otvorenom položaju kada se traži prekid toka struje, pouzdanosti sistema sa slike 7.5 na osnovu tabele 7.1 biće:

Analiza pouzdanosti sistema sa višestacionarnim elementima
86
R = R1R2 + R1Q201 + R1Q202 + Q101R2 + Q101Q202 + Q102R2 + Q102Q202 + Q102Q202
(7.30)
Može se primetiti da je pouzdanost ovog sistema dosta niska i da bi se verovatno povećala vezivanjem prekidača na red.
Ukupan broj stanja u kojima se može naći sistem koji se sastoji od n elemenata, pri čemu svaki i-ti element ( i=1,2,3,...,m) čiji je broj xi se može naći u Yi-to, broju stanja, dobija se po obrascu (varijacije sa ponavljanjem):
31 21 2 3 ... mx xx x
mV Y Y Y Y= ⋅ ⋅ ⋅ ⋅ (7.31)
gde je 1 2 3 ... mx x x x n+ + + + =
Vidi se da je broj stanja u kojima se mogu naći sistemi sa višestacionarnim elementima vrlo veliki i da je porarčun pouzdanosti takvih sistema kompleksan.
7.1. Pouzdanost u slučaju višestacionarnih vremenski zavisnih elemenata
Kao što se moglo videti u odeljku 7.1 mnogi elementi mogu da imaju više od dva stanja (dobar ili loš) pa se tada za njih kaže da su to multistacionarni elementi. Kao primer jednog takvog elementa navedena je poluprovodnička dioda, koja može da bude u tri stanja: ispravna, otkazala zbog prekida i otkazala zbog kratkog spoja. Sada će se razmotriti određivanje pouzdanosti u slučaju trostacionarnih elemenata, kada je vreme do otkaza jednog takvog elementa slučajna promenljiva veličina sa odgovarajućom funkcijom gustine otkaza fi(t). Pri tome će se pretpostaviti da ovi trostacionarni elementi mogu da se nalaze u sledeća tri sanja: ispravan, otkaz zbog prekida i otkaz zbog kratkog spoja.
Neka je qip uslovna verovatnoća otkaza zbog prekida, a qik uslovna verovatnoća otkaza zbog kratkog spoja pod uslovom da je i-ti element otkazao. Tada će zbir ove dve verovatnoće kada je i-ti element otkazao biti jednak 1:
qip + qik = 1 (7.32)
Pretpostavlja se da su ove dve uslovne verovatnoće otkaza nezavisne od vremena, što je najčešći slučaj u praksi. Međutim, kada to nije slučaj, onda qip treba napisati kao qip(t), a qik kao qik(t).
Prema tome verovatnoća da će element otkazati zbog prekida pre nekog vremena t biće qip qi(t), dok će verovatnoća da će element otkazati zbog kratkog spoja biti qik qi(t), gde je qi(t) verovatnoća otkaza i-tog elementa pre vremena t, pa se definiše izrazom:
10
( ) ( )t
iq t f t dt= ∫ (7.33)

Analiza pouzdanosti sistema sa višestacionarnim elementima
87
Izračunavanje pouzdanosti redne, paralelne, redno-paralelne i parelelno-redne veze vrši se na osnovu navedenih obrazaca, pri čemu treba izvršiti zamene u obrascima
P( ipx )→ qip qi(t) i P( ikx ) → qik qi(t).
Tako se, na primer, dobija izraz za pouzdanost redne veze koji glasi:
1 1
( ) [1 ( )] ( )n n
ip i ik ii i
R t q q t q q t= =
= − −∏ ∏ (7.34)
Ako su svi elementi identični, pri čemu su qip = qp, qik = qk i qi= q(t), dobija se:
R(t) = [ 1 - qp q(t) ]n – [ qk q(t) ]n (7.35)
Sličnim razmatranjem određuje se i pouzdanost sistema koji se sastoji od n trostacionarnih elemenata u paralelnoj konfiguraciji. Odgovarajućim zamenama u izraz izveden u poglavlju 7.1 pod 2) dobija se sledeći izraz:
1 1
( ) [1 ( )] ( )n n
ik i ip ii i
R t q q t q q t= =
= − −∏ ∏ (7.36)
Kada su svi elementi identični, pri cemu su qik = qk , qip = qp i qi(t)= q(t), gornji izraz prelazi u :
R(t) = [ 1 – qk q(t) ]n – [ qn q(t) ]n (7.37)

Efektivnost sistema i pokazatelji efektivnosti
88
8. EFEKTIVNOST SISTEMA I POKAZATELJI EFEKTIVNOSTI
Efektivnost sistema je širi pojam od pojma pouzdanosti sistema i predstavlja sposobnost
sistema da obavi funkciju za koju je namenjen, uključujući tu frekvenciju sa kojom se dešavaju otkazi, teškoće koje se javljaju u toku popravki i održavanja, kao i podobnost sistema da obavi funkciju kada radi u skladu sa konstrukcijskim karakteristikama.
Opšte prihvaćeni pokazatelji efektivnosti sistema su: pouzdanost, raspoloživost i učinak. Zbog toga, kada se govori o pouzdanosti, nužno je razmatrati i efektivnost sistema, kako bi se sagledala uloga pouzdanosti u konceptu efektivnosti.
8.1. Koncepti efektivnosti sistema
Danas su, najčešće, u upotrebi tri koncepta efektivnsoti sistema, pri čemu svaki od njih sadrži pomenute pokazatelje a neznatno se međusobno razlikuju. Ova tri koncepta se obično, označavaju slovima A,B i C.
A koncept efektivnosti sistema. A koncept efektivnosti sistema obuhvata tri pokazatelja i to: operativnu gotovost, pouzdanost zadatka i funkcionalnu podobnost. Efektivnost se po ovom konceptu definiše kao verovatnoća da će sistem uspešno zadovoljiti operativni zahtev u toku datog vremena kada radi pod specificiranim uslovima. Prema tome, uzimajući u obzir navedene pokazatelje, efektivnost sistema se može napisati u obliku:
FPPZOGES PPPP ⋅⋅= (8.1)
gde su:
PES – verovatnoća efektivnosti sistema,
POG – verovantoća operativne gotovosti,
PPZ – verovatnoća pouzdanosti zadatka,
PFP – verovatnoća funkcionalne podobnosti.
B koncept efektivnosti sistema. Po ovom konceptu, efektivnost sistema se definiše kao stepen do kojeg se od sistema može očekivati da ostvari skup specificiranih zahteva zadatka. Efektivnost se izražava u funkciji od raspoloživosti, izdrživosti i sposobnosti.
Raspoloživost – A je stepen operativnosti sistema na početku izvršenja zadatka, ali se izvršenje zadatka može tražiti i u bilo kom drugom trenutku vremena.
Izdržljivost – D je mera stanja operativnosti sistema u bilo kom trenutku vremena u toku izvršenja zadatka, pri čemu su uključeni efekti raspoloživosti.

Efektivnost sistema i pokazatelji efektivnosti
89
Sposobnost – C je mera mogućnosti sistema da ostvari ciljeve zadatka, pri čemu je data izdržljivost.
Dakle u kontekstu koncepta B, efektivnsot sistema – E, može se napisati u sledećem obliku:
CDAE ⋅⋅= (8.2)
odakle se vidi da postoji velika sličnost sa definicijom efektivnosti sistema po konceptu A.
C koncept efektivnosti sistema. Po ovom konceptu, efektivnost sistema se definiše kao stepen do kojeg se može očekivati da će sistem obaviti dodeljeni zadatak unutar specificiranog vremenskog okvira pod formulisanim uslovima okoline. I u ovom slučaju efektivnost sistema obuhvata tri parametra: učinak, raspoloživost i korišćenje, a može se izraziti kao:
UAPES ⋅⋅= (8.3)
gde su:
ES – indeks efektivnosti sistema,
P – indeks učinka sistema,
A – indeks raspoloživosti sistema i
U – indeks korišćenja sistema.
Posmatrajući ova tri koncepta efektivnsoti, dolazi se do zaključka, da su elementi ukupne efektivnosti u osnovi isti, iako postoji određena razlika u terminologiji. Za dalje potrebe izlaganja razmatraće se A koncept, za koji će se detaljnije definisati osnovni parametri i vremenske kategorije.
Bez obzira na različitu terminologiju, zadatak efektivnosti sistema u sva tri koncepta je davanje odgovora na sledeća tri pitanja:
1. Da li je sistem spreman za izvršenje svoje funkcije, kada se to od njega zahteva?
2. Da li će sistem nastaviti da funkcioniše u toku specificiranog vremena trajanja zadatka, ukoliko je odgovor na prvo pitanje pozitivan?
3. Da li će sistem ispuniti željene ciljeve zadatka, pod uslovom da je odgovor na prva dva pitanja pozitivan?
U A konceptu efektivnosti sistema, odgovor na prvo pitanje daje operativna gotovost, na drugo pouzdanost zadatka i na treće funkcionalna podobnost. Svaki od ova tri parametra zavisi od zahteva u pogledu korišćenja, od stanja sistema i od njegovih performansi. Vreme je kritičan elemenat i za operativnu gotovost i za pouzdanost zadatka, dok je od manjeg značaja za funkcionalnu podobnost.

Efektivnost sistema i pokazatelji efektivnosti
90
8.2. Pokazatelji efikasnosti sistema
Na osnovu definicije efektivnosti sistema, može se uočiti da efektivnost zavisi od mnogobrojnih fakotra i da obuhvata različite pokazatelje i vremenske kategorije. Takođe, kada se govori o efektivnosti, mogu se izdvojiti pojedini sistemi kod kojih postoji jasna razlika u odnosu na ostale sisteme. Primer takvih sistema, jesu sistemi za jednokratna dejstva. Kod njih, za razliku od drugih sistema, vreme nije od primarnog značaja i nije dozvoljena mogućnost popravki, obzirom da se očekuje da obave zadatak, kada se to od njih zahteva, pod specificiranim uslvoima (npr. raketa da uništi cilj).
Postoje sistemi od kojih se zahteva da rade u kontinuitetu. Samim tim, efektivnost sistema se smanjuje ako sistem sam otkaže ili ako se planski prekine njegov rad, odnosno ako je neophodno održavanje.
Održavanje sistema povećava efektivnost jedino ako se radi o sistemu koji se povremeno korisit ili ako se od sitema u tom trenutku ne zahtva upotreba.
Ponekad operativni zahtevi prevazilaze mogućnost sistema. U tom slučaju efektivnost sistema je drastično smanjena.
Efektivnost sistema najbolje može da se sagleda, kroz pokazatelje i vremenske kategorije, kao i kroz njihov uzajamni odnos, koji je predstavljen na slici 8.1.
Da bi se razmotrio način na koji se određuju parametri efektivnosti sistema, potrebno je dati njihove definicije.
Slika 8.1 Pokazarelji i vremenske kategorije

Efektivnost sistema i pokazatelji efektivnosti
91
Pouzdanost zadatka je pokazatelj koji predstavlja verovatnoću da sitem, kada se korisit u svrhe za koje je napravljen i pod predviđenim uslovima, funkcioniše u toku trajanja zadatka, pod uslovom da je bio ispravan na početku zadatka.
Operativna gotovost je takođe, pokazatelj efektivnosti, na osnovu kojeg se razmatra spremnost sistema da izvrši zadatak u datom trenutku vremena. Ona zapravo predstavlja verovantoću, da sistem pod određenim uslovima funkcioniše, u bilo kom trenutku, ili je spreman za upotrebu kada se to zahteva. Osnova za izračunavanje operativne gotovosti je ukupno vreme koje obuhvata vreme skladištenja, slobodno vreme, vreme korišćenja i vreme zastoja. Prema tome može se napisati da je:
MDTMTBMMTBM
ttttt
GOTOVOSTOPERATIVNAznkk
nkk
+=
+++
=_ (8.4)
U relaciji 8.4 uvedena su sledeća obeležavanja za vremena:
tk – vreme korišćenja,
tnk – vreme kada se sistem ne korisiti, ali je spreman za upotrebu,
tz – vreme zastoja (vreme zasotja)
MDT – srednje vreme zastoja (srednje vreme u otkazu)
MTBM – srednje vreme između održavanja. Za srednje vreme između održavanja važi sledeća formula:
kp MTBMMTBM
MTBM11
1
+= (8.5)
gde su:
MTBMp – srednje vreme između preventivnih održavanja,
MTBMk – srednje vreme između korektivnih održavanja.
Operativna raspoloživost sistema se definiše na isti način kao operatina gotovost. Razlika
između operatine gotovosti i operativne raspoloživosti je u tome što operatina raspoloživost sistema ne uzima u obzir vreme skladištenja i vreme kada se ne planira korišćenje sistema. Zbog toga u slučaju operatine raspoloživosti može da se napiše sledeća relacija:
MTTRMTBMMTBM
ttt
OSTRASPOLOZIVOPERATIVNAzk
k
+=
+=_ (8.6)
gde je:
MTTR – srednje vreme između korektivnih popravki (srednje vreme aktivne popravke korektivnog održavanja), dok tk,tz i MTBM imaju isti smisao kao u relaciji 8.4.
Efektivnost sistema i pokazatelji efektivnosti
92
Funkcionalna podobnost sistema je pokazatelj koji zavisi od konstrukcijskih karakteristika sistema. To je verovatnoća, da će sistem da izvrši zadatak, pod uslovom da je zadatak u saglasnosti sa mogućnostima sistema, koje proizilaze iz konstrukcije sistema. Sistem je veoma često moguće, koristiti u različite svrhe, pri čemu nije podjednako uspešan. Naime, bez obzira na visinu pouzdansoti zadatka i visinu operativne gotovosti, efektivnost je niska ukoliko se sistem koristi u svrhe koje mu nisu osnovna namena.
Pogodnost održavanja je konstrukciona karakteristika koja govori o pogodnostima pri popravci sistema ( pronalaženja i otklanjanja neispravnosti). To je verovanoća da će sistem koji je otkazao biti vraćen u operativno stanje u toku specificiranog vremena zastoja, koje obuhvata aktivno vreme popravke, logističko vreme i administrativno vreme. Bolja pogodnost rezultira kraćim aktivnim vremenom popravke.
Popravljivost je osobina uređaja koja određuje mogućnost dobijanja zahtevanih vrednosti parametara po otklanjanju neispranosti. Inače, popravaljivost se definiše na isit način kao pogodnost održavanja. Razlika je u tome, što popravljivost uzima u obzir samo aktivno vreme popravke.
Podobnost servisiranja definiše lakoću sa kojom sistem može bitit popravljen i predstavlja konstrukcijsku karakteristiku sistema koja bitno utiče na popravljivost. Međutim, to su ipak dva različita pojma, obzirom da se popravljivost izražava preko verovatnoće, uključukući i određene vremenske kategorije, dok se podobnost servisiranja izražava kvalitativno, u smislu poređenja dva ili više sistema.
Sopstvena raspoloživost sistema, kao i operativna gotovost i operativna raspoloživost predstavlja verovatnoću da sistem kada se koristi pod određenim uslovima uspešno izvršava zadatak u bilo kom trenutku vremena. Razlika je u tome, što vreme koje se ovde razmatra obuhvata vreme korišćenja i aktivno vreme popravke. Iz toga sledi da je:
MTTRMTBFMTBF
ttt
OSTRASPOLOZIVSOPSTVENAapk
k
+=
+=_ (8.7)
gde su:
tap – aktivno vreme popravke,
MTBF – srednje vreme između otkaza, koje je definisano u prvom poglavlju,
a tk i MTTR ima isti smisao kao u relacijama 8.4 i 8.6 respektivno.
Kad raspodela vremena rada do otkaza odgovara eksponencijalnom zakonu raspodele, sopstvena raspoloživost se može odrediti relacijom:
( ) teOSTRASPOLOZIVSOPSTVENA ⋅+−
++
+= λμ
λμμ
λμμ_ (8.8)
gde su:
MTTR1
=μ - intenzitet opravki,

Efektivnost sistema i pokazatelji efektivnosti
93
MTBF1
=λ - intenzitet otkaza.
Kada ∞→t , sopstvena raspoloživost je:
λμμ+
=iA (8.9)
Sopstvena raspoloživost je veća ili jednaka operativnoj raspoloživosti sistema.
Dostignuta raspoloživost uzima u obzir vrste održavanja koje se vrše na sistemu, tj. planirano (preventivno) i neplanirano (korektivno) održavanje.
8.3. Vremenske kategorije efektivnosti sistema
Ukupno vreme života sistema, ili vreme eksploatacije sisema, koje se računa počev od trenutka puštanja sistema u korišćenje, pa sve do njegovog povlačenja iz upotrebe, može da se podeli na raspoloživo vreme i neraspoloživo vreme. Ova raspodela prikazana je na slici 8.2.
Raspoloživo vreme je vreme u toku kojeg se sistem koristi ili je spreman za korišćenje dok neraspoloživo vreme obuhvata vreme zastoja sistema. Sistem koji se posmatra može biti operativan (kada je u ispravnom stanju) ili neoperativan ( kada je u otkazu i kada obuhavta administrativno vreme, logističko vreme i aktivno vreme popravke). Od sistema može da se zahteva da se koristi ili da se ne koristi. Vreme koje sistem provodi u pasivnom stanju, odnosno kada se ne zahteva njegova upotreba, obuhvata vreme skladištenja i slobodno vreme. U skladu sa pomenutim podelama napravljena je dvodimenzionalna klasifikacija vremenskih kategorija, koja je prikazana u tabeli 8.1.
UKUPNO VREME
Raspoloživo vreme Neraspoloživo vreme Raspoloživo vreme
Slob
odno
vre
me
Vre
me
korišće
nja
Slob
odno
vre
me
Vre
me
korišće
nja
Logi
stič
ko v
rem
e
Akt
ivno
vre
me
Popr
avke
Adm
inis
trativ
no v
rem
e
Vre
me
korišće
nja
Slo
bodn
o vr
eme
Vre
me
korišće
nja
Vreme
Slika 8.2 Principijelna podela ukupnog vremena

Efektivnost sistema i pokazatelji efektivnosti
94
Idealno povećanje efektivnosti sistema postiže se smanjenjem otkaza i efikasnim merama održavanja.
U vremenske kategorije spadaju: vreme korišćenja, vreme zastoja, slobodno vreme, vreme skladištenja, vreme popravljivosti i vreme reakcije.
Tabela 8.1 Dvodimenzionalna klasifikacija vremenskih kategorija
Ne zahteva se korišćenje sistema
Zahtev u pogledu korišćenja sistema
Stanje sistema
Zahteva se korišćenje sistema Slobodno
vreme Vreme
skladištenja
Sistem operativan Nema problema Nema problema
Sistem neoperativan - aktivno vreme popravke
- logističko vreme - administrativno vreme
Efikasnost sistema smanjena
Problemi postoje ali ne utiču na
efikasnost sistema
Vreme korišćenja predstavlja vreme u toku kojeg sistem funkcioniše na zadovoljavajući način. Ovo vreme je osnova za izračunavanje pouzdanosti.
Vreme zastoja predstavlja period vremena u kojem je sistem neoperativan. Kao što se vidi na slici 8.2 vreme zastoja obuhvata aktivno vreme popravke, logističko vreme i administrativno vreme . A k t i v n o v r e m e p o p r a v k e je vremenski interval u toku kojeg se sprovode aktivnsoti u vezi sa popravkom sistema: vreme za pripremu, vreme za dijagnozu otkaza, vreme za otklanjanje otkaza i vreme potrebno za funkcionalnu proveru sistema posle opravke. Osnova je za izračunavanje popravljivosti. L o g i s t i č k o v r e m e je vreme koje protekne u čekanju rezervnih delova, kada se konstatuje vrsta otkaza. A d m i n i s t r a t i v n o v r e m e je vremenski interval, koji se odnosti kako na neophodne administrativne aktivnsoti (izdavanje naloga za popravku itd.), tako i na administrativne propuste pre i u toku izvršenja popravke. Vreme zastoja je osnova za izračunavanje pogodnsoti održavanja.
Slobodno vreme je ono vreme u toku kojeg se ne zahteva korišćenje sistema ( ako se desi da je sistem neisptavan onda je to deo vremena zastoja).
Vreme skladištenja je vreme u toku kojeg se sistem nalazi u skladištu kao rezervni deo, pri čemu se pretpostavlja da je u operativnom stanju.
Vreme pripravnosti je deo vremena spremnosti za rad potreban za započinjanje zadatka, mereno od trenutka kada je primljena komanda.
Vreme reakcije je vreme od dobijanja komande do početka rada sistema.
Sve definisane vremenske kategorije, mogu da se predstave preko određenog broja vremenskih jedinica, što dalje omogućava određivanje operativne gotovosti, operativne raspoloživosti i sopstvene raspoloživosti.
Na osnovu svega što je rečeno u ovom poglavlju, može se zaključiti, da se efektivnost sistema odnosi na ono zbog čega kupujemo sistem – na izvršenje funkcije za koju je namenjen, a pouzdanost sistema predstavlja bitan parametar efektivnosti.

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
95
9. PRORAČUN POUZDANOSTI KOMPONENATA SISTEMA METODOM MIL - HDBK- 217D
Nalaženje intenziteta otkaza, kao osnovnog parametra u analiziranju pouzdanosti, zasnovano je na korišćenju priručnika MIL – HDBK – 217D Reliability Prediction of Electronic Equipment.
Prognozirana pouzdanost, na osnovu procenjenog intenziteta otkaza, može se izraziti kao:
( ) SRpr Tt
tpr eetR
−⋅− == λ (9.1)
gde su prλ procenjeni intenzitet otkaza i SRT procenjeno srednje vreme rada do otkaza.
Osnovne metode izračunavanja intenziteta otkaza sistema, koje će biti korišćene u daljem izlagnju, mogu se primentiti na većinu komponenati u savremenim elektronskim uređajima. Uvođenjem odgovarjućih relacija, osnovni model se može proširiti na druge grupe elemenata. Mehaničke i elektormehaničke komponente nisu obuhvaćene ovom analizom.
9.1. Opšte napomene
9.1.1. Osnovna podela
Osnovna podela elektronskih komponenti, sa stanovišta analize intenziteta otkaza izvršena je po sledećim grupama:
• mikro elektronska kola
• diskretni poluprovodnički elementi
• elektronske vakumske cevi
• laseri
• otpornici
• kondenzatori induktivni elementi
• obrtni elementi
• relea
• prekidači
• konektori
• štampane ploče
• spojevi

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
96
• ostali elementi (vibratori, kvarcni kristali, osigurači,)
9.1.2. Faktor kvaliteta
Kvalitet neke komponente direktno utiče na njen intenzitet otkaza i u sovnovnom modelu figurše kao faktor qπ . Za većinu kategorija (osim za mikroelektronska kola i diskretne poluprovodnike) usvojena je klasifikacija kvaliteta kompnenti u sldeće nivoe:
• L – nizak kvalitet
• M – srednji kvalitet
• P – precizni kvalitet
• R – rast pouzdanosti
• S – super kvalitet Za starije tipove komponenti koje nisu klasifikovane po gore navedenim nivoima, postoje
samo dva nivoa kvaliteta:
• MIL – vojni (visoki) kvalitet
• LO – niži (komercijalni) kvalitet Mikroelektronska kola imaju sledeću gradaciju nivoa kvaliteta :
S,B,B-0,B-1,B-2, C,C-1,D,D-1
Diskretni poluprovodnici se po kvalitetu klasifijuju na sledeći način:
• JANTXV
• JANTX
• JAN
Neki elementi, po svojoj specifikaiji, mogu imati i drugačije oznake nivoa kvaliteta, ali korekcija intenziteta otkaza u odnosu na kvalitet obavezna je za sve grupe.
9.1.3. Faktor amibijenta
Uticaj amibijenta na intenzitet otkaza komponente dat je prko korekcionog faktora Eπ i odnosi se na sve elemente. U specijalnim slučajevima, kada se sisem kreće kroz više različitih sredina mora se uzeti u obzir uticaj svake sredine ponaosob. Standardna klasifikaija ambijenta prema MIL- HDBK- 217D glasi:
• GB - stacionarni laboratorijski uslovi na zemlji
• GF - stacionarni uslovi na zemlji
• GM - pokretni uslovi na zemlji
• SF - Zemljina orbita

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
97
• MP - prenosni uslovi na zemlji
• NS - uslovi na brodu (zaštićen od uslova okoline)
• NU - uslovi na brodu
• NUU - uslovi pod vodom
• NSB - uslovi u podmornicama
• NH - uslovi u hidrogilseru
• AIT - kabine standardih letećih uređaja
• AIF - kabine specijalnih letelica
• AUT - druga mesta na letelicama
• AUF - druga mesta na specijalnim letelicama
• ARW - uslovi na helikopteru
• ML - uslovi lanisranja
• CL - projktili sa topa
• USL - vodene rakete
• MFF - uslovi slobodnog pada
• MFA - uslovi lansiranja (uključujući i krstareće rakete)
9.1.4. Ostali korekcioni faktori
• za mikroelektronska kola:
Lπ - trenažni faktor
Tπ - temperatuni faktor
Vπ - faktor naponskog opterećenja
• za diskretne poluprovodnike:
Aπ -faktor prilagođenja
Rπ - faktor snage
Cπ - kompleksni faktor
2Sπ - faktor naponskog opterećenja
• vakuumske elektronske cevi:
Lπ - trenažni faktor
• za otpornike:
Rπ - otporni faktor

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
98
Cπ - faktor konstrukcije
Vπ - naponski faktor
tapsπ - potenciometarski faktor
• za kondenzatore:
SRπ - faktor serijske otpornosti
CVπ - kapacitivni faktor
Cπ - konstrukcioni faktor
• za induktivne elemente:
Cπ - konstrukcioni faktor
• za releje:
Cπ - kontaktni faktor
Fπ - faktor namene i konstrukcije
CYCπ - obrtni faktor
• za preikidače:
Cπ - kontaktni faktor
Lπ - faktor opterećenja
CYCπ -obratni faktor
• za konektore :
Pπ - multiplikativni faktor
Kπ - faktor uključenja/isključenja
• za spojeve:
Tπ - faktor rukovanja
9.2.Mikroelektronska kola
Prema analizi otkaza sistema mikroelektronska kola mogu se podeleiti u sledeće osnovne grupe:
• digitalno bipolarna i MOS kola (SSI/MSI)
• linearna bipolarna i MOS kola
• bipolarne i MOS memorije Intenzitet otkaza mikroelektronskih kola generalno se računa prem formuli:

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
99
( )[ ]EVTLQp CCC πππππλ ⋅++⋅⋅⋅= 321 otkaza / 106 časova (9.2)
gde su C1 i C2 kompleksni intenziteti otkaza zavisni od broja gejtova, a C3 kompleksni intenzitet otkaza pakovanja koji zavisi od tipa pakovanja i broj nožica. (Korekcioni faktori ELQ πππ ,, ... (i ostali u narednom tekstu), nalaze se u odgovarajućim tabelama MIL-HDBK-217D).
Temperaturni faktor Tπ za sve elementa ove grupe računa se kao:
xT e⋅= 1.0π (9.3)
gde je:
⎟⎟⎠
⎞⎜⎜⎝
⎛−
+⋅−=
2981
2731
jTAx (9.4)
Konstanta A zavisi od tehnologije izrade komponenata. Temperatura Tj ukoliko nije data može se izračunati kao:
PTT JCCj ⋅+= θ (9.5)
gde je TC radna temperatura, JCθ termička otpornost spoja elementa i ploče i P snaga disipacije.
Faktor naponskog opterećenja Vπ , karakterističan samo za kola izrađena u CMOS tehnologiji, zavisi samo od napona Vdd i izračunava se kao:
za Vdd=5V 1=Vπ (9.6)
za Vdd od 12-15V xV e⋅= 11.0π (9.7)
gde je:
( )298
273168.0 +⋅⋅= JS TVx (9.8)
-za Vdd od 18-20V xV e⋅= 068.0π (9.9)
gde je:
( )298
273135.0 +⋅⋅= JS TVx (9.10)
Za sve ostale komponente 1=Vπ (9.11)

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
100
U prethodnim izrazima Tj je temperatura spoja, a Vs radni napon.
Kompleksni intenzitet otkaza C1 i C2 zavisi od tipa komponente i broja gejtova odnostno tranzistora i računaju se kao:
• za bipolarna digitalna kola:
654.041 1048.7 GNC ⋅⋅= − (9.12)
364.042 1019.2 GNC ⋅⋅= −
gde je NG broj gejtova u kolu,
• za Mos digitalna kola:
357.031 1017.2 GNC ⋅⋅= − (9.13)
178.042 1019.2 GNC ⋅⋅= −
• za linearna kola:
78.031 1057.1 TNC ⋅⋅= − (9.14)
535.042 108 TNC ⋅⋅= −
gde je NT broj tranzistora u kolu,
• za bipolarnoe RAM memorije:
576.031 102.2 BC ⋅⋅= − (9.15)
554.052 103 BC ⋅⋅= −
gde je B broj bita memorije,
• za MOS i CCD RAM memorije:
61.041 105 BC ⋅⋅= − (9.16)
585.052 103 BC ⋅⋅= −
• za bipolarne ROM i PROM memorije:

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
101
338.041 108.8 BC ⋅⋅= − (9.17)
378.052 105.4 BC ⋅⋅= −
• za MOS ROM i PROM memorije:
425.031 102.1 BC ⋅⋅= − (9.18)
399.052 106.6 BC ⋅⋅= −
Kompleksni intenzitet pakovanja C3 izračunava se kao:
• za hermetički DIP
08.143 108.2 PNC ⋅⋅= − (9.19)
• za nehermetički DIP
23.143 102 PNC ⋅⋅= − (9.20)
gde je NP broj pinova.
Intenzitet otkaza mikroelektronskih kola ne zavisi od temperature ambijenta, međutim kao što je moglo da se vidi zavisi od broja tranzistora, broja kola, broja pinova itd. Na slici 9.1 prikazana je zavisnost intenziteta otkaza od broja pinova kod mikroelektronskih kola, pri čemu je
λp[1/106h] 1.1 1.0 0.8 0.6 0.4 0.2 14 15 16 17 18 19 20 21 22 23 24 Broj pinova
Slika 9.1 Zavisnost intenziteta otkaza od broja pinova kod mikroelektronskih kola

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
102
uzeto da ima 4 kola sa ukupno 40 tranzistora. Temperatura spoja je 25 C. Konkretne vrednosti na grafiku odnose se na digitalna SSI/MSI kola u PMOS, NMOS i CMOS tehnologiji, dok tranzistori u bipolarnoj tehnologiji imaju isti oblik zavisnosti sa nešto nižim vrednostima za intenzitet otkaza. Tako, u slučaju bipolarnog digitalnog SSE/MSI kola, kada je broj pinova 14 intenzitet otkaza iznosi 0.005986 otkaza / 106h.
Takođe, kada su u pitanju linearna, ROM i RAM mikroelektronska kola, oblik zavisnosti intenziteta otkaza je isti kao na slici 9.1, dok se vrednosti za intenzitet otkaza razlikuju od slučaj do slučaja.
Važno je napomenuti, da intenzitet otkaza raste, kada se povećava broj kola i temperatura spoja, dok broj tranzistora u kolima neznatno utiče na intenzitet otkaza. Već kapacitet memorije kod RAM i ROM kola doprinsoi takođe, većem intenzitetu otkaza.
9.3. Diskretni poluprovodnici
Sa stanovišta analize otkaza, diskretne poluprovodnike možemo podeliti u četiri grupe :
• tranzistori
• diode
• mikrotalasni poluprovodnici
• optoelektronska kola Za diskretne poluprovodnike intenzitet otkaza se generalno izračunava kao :
( )CSAQREBP ππππππλλ ⋅⋅⋅⋅⋅⋅= 2 otkaza/106 h (9.21)
Bazni intenzitet otkaza nalazi se :
xB eA ⋅=λ otkaza/106h (9.22)
gde je:
P
M
T
TSTT
STTNx ⎟⎟
⎠
⎞⎜⎜⎝
⎛ ⋅Δ+++
⋅Δ++=
273273
(9.23)
faktor skaliranja
NT,TM,P-faktor stanja
TΔ - razlika maksimalne temperature kada kroz spoj protiče odnosno ne protiče struja
S- koeficient opterećenja
T- temperatrua ambijenta

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
103
Bipolarni tranzistori. Tipovi: Si PNP, Si NPN, Ge PNP, Ge NPN
( )CSAQREBp ππππππλλ ⋅⋅⋅⋅⋅⋅= 2 otkaza /106h (9.24)
Korekcioni faktor 2Sπ izračunava se:
20133..02 1014.0 S
S⋅⋅=π za 252 ≥S
3.02 =Sπ za 252 <S (9.25)
gde je:
1002 ⋅=CEO
CE
VVS (9.26)
naponsko opterećenje.
Fetovi. Tipovi: Si FET, GaAs FET
( )CQREBp ππππλλ ⋅⋅⋅⋅= otkaza/106h (9.27)
Spojni FET-ovi.
( )QEBP ππλλ ⋅⋅= otkaza / 106h (9.28)
Diode. Tipovi: Si,Ge
( )CSAQREBP ππππππλλ ⋅⋅⋅⋅⋅= 2 otkaza/106h (9.29)
Zener diode.
Tipovi: naponski regulatori, naponske feference
( )AQEBP πππλλ ⋅⋅⋅= otkaza/106h (9.30)
PIN i tunel dioda. Tipovi: varactor, PIN, IMPAT, tunel

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
104
( )AQREBP ππππλλ ⋅⋅⋅⋅= otkaza/106h (9.31)
λp[(1/106h)10-3] 0.02 0.02 0.02 0.01 0.01 0.01 0.01 0.00
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.2 Zavisnost intenziteta otkaza od temperature kod diskretnih poluprovodnika pri električnom opterećenju 0.1
λp[1/106h] 0.08 0.06 0.04 0.02
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.3 Zavisnost intenziteta otkaza od temperature kod diskretnih poluprovodnika pri električnom opterećenju 0.5

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
105
λp[1/106h] 240.00 180.00 120.00 60.00
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.4 Zavisnost intenziteta otkaza od temperature kod diskretnih poluprovodnika pri električnom opterećenju 0.999
Optoelektronski poluprovodnici. Tipovi: LED, fototranzistori, fotodioda
( )TQEBP πππλλ ⋅⋅⋅= otkaza/106h (9.32)
Temperaturni faktor Tπ se izračunava kao:
3748111
01.8 +−
⋅= jTT eπ (9.33)
gde je Tj temperatura spoja.
Zavisnost intenziteta otkaza od temperature za optoelektronske poluprovodnike prikazan je na slici 9.5. Navedene vrednosti za intenzitet otkaza na grafiku odnose se na LED diodu. Intenziteta otkaza za fotodiodu, pri važećem temperaturnom opsegu je od 0,071 do 3,86 otkaza/106h, a za fototranzistor u intervalu od 0.841 do 45,16 otkaza/106h.

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
106
λp[1/106h] 4.00 3.00 2.00 1.00
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.5 Zavisnost intenziteta otkaza od temperature kod optoelektronskih provodnika
Intenzitet otkaza u ovom slučaju ne zavisi ni od snage, ni od električnog opterećenja, ni od naponskog opterećenja.
9.4. Vakuumske cevi
Intenzitet otkaza vakuumske cevi izračunava se na sldeći način:
( )LEBP ππλλ ⋅⋅= otkaza/106h (9.34)
Korekcioni faktor obučenosti Lπ izračunava se:
1.210 −⋅= tLπ za 31 << t
10=Lπ za 1<t (9.35)
1=Lπ za 3>t
gde je t broj godina obučavanja za korišćenje u vojne svrhe. Intenzitet otkaza u zavisnosti od trenaže prikazan je na slici 9.6. Konkretne vrednosti na grafiku odnose se na prijemne trode/tetrode/pentode. Ostali tipovi vakuumskih cevi imaju isti oblik zavisnosti od trenaže, dok se vrednosti za intenzitet otkaza razlikuju od slučaja do slučaja.

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
107
λp[1/106h] 25.0 22.5 20.0 17.5 15.0 12.5 10.0 7.5 5.0 2.5
0 1.0 2.0 3.0 4.0 5.0 6.0 7.0 8.0 9.0 10.0 Trenaža
Slika 9.6 Zavisnost intenziteta otkaza od težine kod vakuumske cevi
9.5. Laseri
Sa stanovišta analize otkaza sistema lasere možemo podeliti u sledeće kategorije:
• Helium/Neonski
• Argon jonski
• Ugljen dioksidni
Helijum - neonski laser.
ENeHe πλ ⋅= 1.84/ otkaza/106h (9.36)
Intenzitet otkaza ne zavisi od temperature i iznosi 16,82.
Argon jonski laseri.
EAI πλ ⋅= 3.46 otkaza/106h (9.37)
Intenzitet otkaza ne zavisi od temperature i iznosi 92,6.
Ugljen dioksidni laseri.

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
108
( ) OSECO P ππλ ⋅⋅⋅= 3002 otkaza/106h (9.38)
Gde su
P- izlazna snaga u KW
OSπ -broj aktivnih optičkih površina
9.6. Otpornici
U okviru analize otkaza sistema, optornici se mogu generalno podeliti u sledeće grupe:
• fiksni
• varijabilni
• termistori
Fiksne dalje delimo na osnovne podgrupe:
• kompozitni
• filmski
• žičani
Varijabilne delimo na:
• žičane
• nežičane
Intenzitet otkaza fiksnih otpornika izračunava se kao:
( )QREBP πππλλ ⋅⋅⋅= otkaza/106h (9.39)
Za varijabilne otpornike izračunava se prema sledećem izrazu:
( )CVtapsQREBP ππππππλλ ⋅⋅⋅⋅⋅⋅= otkaza/106h (9.40)
dok se za termistore direktno uzima iz tablice 5.1.6.5 MIL-HDBK-217D.
Bazni intenzitet otkaza Bλ izračunava se iz relacije:

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
109
HT
NSG
NTB
B
J
ST eeA ⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ +
⎟⎟⎠
⎞⎜⎜⎝
⎛ +⋅
⋅⋅=273
273273
λ otkaza/106h (9.41)
gde su:
A - skalirajuća konstanta
NT - temperaturna konstanta
B - konstanta stanja
G,H,J - konstante ubrzanja
NS -konstanta opterećenja
T - temperatura ambijenta
S - faktor električnog opterećenja
Navedene konstante zavise od tipa otpornika i očitavaju se iz tablice 5.1.6-1MIL-HDBK-217D.
Kompozitni fiksni otpornici. Zavisnost intenziteta otkaza od temperature za kompozitne fiksne otpornike pri električnom opterećnjeu od 0,5 prikazana je na slici 9.7.
λp[(1/106h)10-3] 0.32 0.24 0.16 0.08
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.7 Zavisnost intenziteta otkaza od temperature kod kompozitnih fiksnih otpornika pri električnom opterećenju 0.5
Filmski fiksni otpornici. Zavisnost intenziteta otkaza od temperature za filmske fiksne
otpornike pri električnom opterećenju od 0,5 prikazana je na slici 9.8.

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
110
λp[(1/106h)10-3] 0.16 0.12 0.08 0.04
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.8 Zavisnost intenziteta otkaza od temperature kod filmskih fiksnih otpornika pri električnom opterećenju 0.5
Žičani fiksni otpornici. Zavisnost intenziteta otkaza od temperature za žičane fiksne otpornike pri električnom opterećenju od 0,5 prikazana je na slici 9.9.
λp[(1/106h)10-3] 1.60 1.20 0.80 0.40
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.9 Zavisnost intenziteta otkaza od temperature kod žičanih fiksnih otpornika pri električnom opterećenju 0.5
Varijabilni otpornici. Zavisnost intenziteta otkaza od temperature za varijabilne žičane otpornike prikazana je na slici 9.10, a za varijabilne nežičane otpornike na slici 9.11. U oba slučaja električno opterećenje iznosi 0,5.
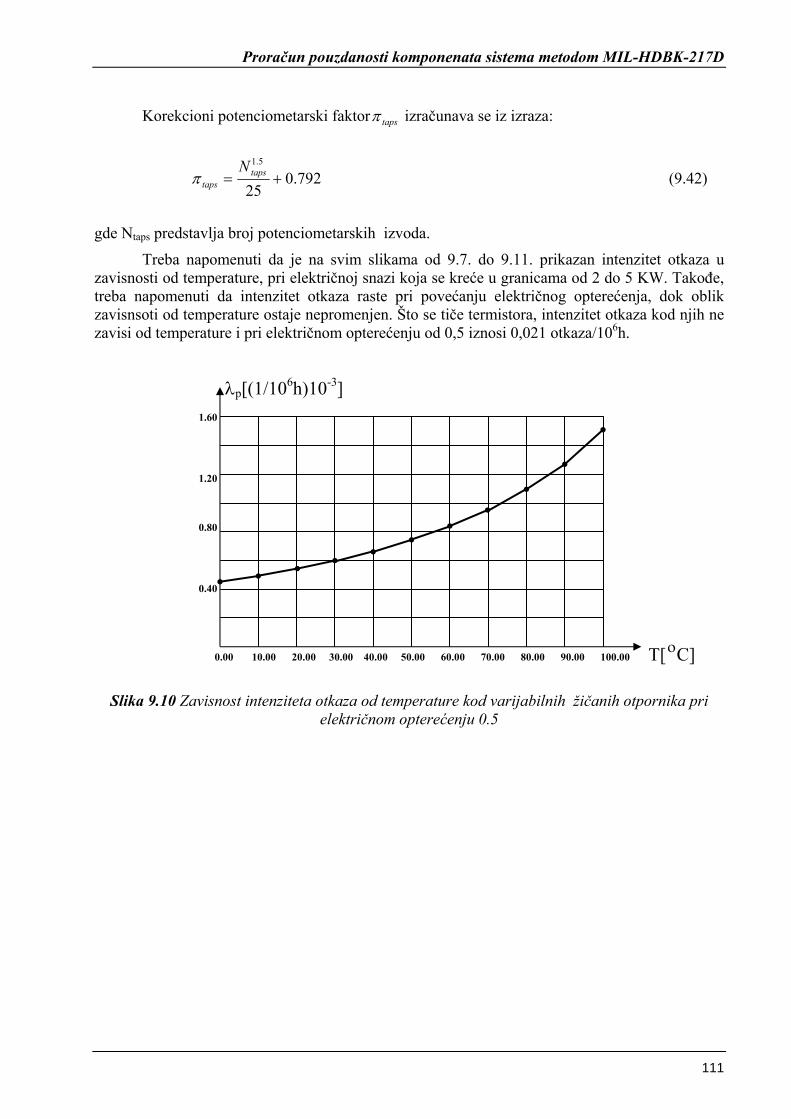
Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
111
Korekcioni potenciometarski faktor tapsπ izračunava se iz izraza:
792.025
5.1
+= tapstaps
Nπ (9.42)
gde Ntaps predstavlja broj potenciometarskih izvoda.
Treba napomenuti da je na svim slikama od 9.7. do 9.11. prikazan intenzitet otkaza u zavisnosti od temperature, pri električnoj snazi koja se kreće u granicama od 2 do 5 KW. Takođe, treba napomenuti da intenzitet otkaza raste pri povećanju električnog opterećenja, dok oblik zavisnsoti od temperature ostaje nepromenjen. Što se tiče termistora, intenzitet otkaza kod njih ne zavisi od temperature i pri električnom opterećenju od 0,5 iznosi 0,021 otkaza/106h.
λp[(1/106h)10-3] 1.60 1.20 0.80 0.40
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.10 Zavisnost intenziteta otkaza od temperature kod varijabilnih žičanih otpornika pri električnom opterećenju 0.5

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
112
λp[(1/106h)10-3] 2.00 1.50 1.00 0.50
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.11 Zavisnost intenziteta otkaza od temperature kod varijabilnih nežičanih otpornika pri električnom opterećenju 0.5
9.7. Kondenzatori
Sa stanovišta analize otkaza sistema, kondenzatori se mogu podeliti u sledeće grupe:
• papirni i plastični kondenzatori
• mika kondenzatori
• stakleni kondenzatori
• keramički kondenzatori
• elektrolitički kondenzatori
• varijabilni kondenzatori Generalno intezitet otkaza kondenzatora nalazi se kao:
( )CQSRCVEBP πππππλλ ⋅⋅⋅⋅⋅= otkaza/106h (9.43)
Bazni intenzitet otkaza izračunava se kao:
G
NTB
H
SB
TeNSA
⎟⎟⎠
⎞⎜⎜⎝
⎛ +⋅
⋅⎥⎥⎦
⎤
⎢⎢⎣
⎡+⎟⎟
⎠
⎞⎜⎜⎝
⎛⋅=
273
1λ otkaza/106h (9.44)
gde su:

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
113
• A - skalirajuća konstanta
• NT - temperaturna konstanta
• B - konstanta stanja
• G,H - konstante ubrzanja
• NS - konstanta opterećenja
• S - naponsko opterećenje
• T - temperatrua ambijenta
Papirni i plastični kondenzatori. Intenzitet otkaza ovih kondenzator računa se prme izrazu:
( )QCVEBP πππλλ ⋅⋅⋅= , (9.45)
Korekcioni faktor CVπ izračunava se:
095.02.1 CCV ⋅=π (9.46)
Gde je C kapacitet kondenzatora u PF. Zavisnost intenziteta otkaza od temperatrue za papirne i pločaste kondenzatore pri električnom optetrećenju od 0,5 prikazana je na slici (9.12.)
λp[1/106h] 0.04 0.04 0.03 0.03 0.02 0.02 0.01 0.01
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.12 Zavisnost intenziteta otkaza od temperature kod papirnih i pločastih kondenzatora pri električnom opterećenju od 0.5
Keramički kondenzatori. Intenzitet otkaza keramičkih kondenzatora izračunava se:
( )QCVEBP πππλλ ⋅⋅⋅= (9.47)

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
114
Korekcioni faktor CVπ izračunava se:
11.041.0 CCV ⋅=π (9.48)
gde je C kapacitet kondenzatora u PF. Zavisnosti intenziteta otkaza od temperature za keramičke kondenzatore pri elektirčnom opterećenju od 0,5 prikazana je na slici 9.13.
λp[(1/106h)10-3] 0.12 0.11 0.09 0.07 0.06 0.04 0.03 0.02
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.13 Zavisnost intenziteta otkaza od temperature kod keramičkih kondenzatora pri električnom opterećenju od 0.5
Varijabilni kondenzatori. Kod varijabilnih kondenzatora intenzitet otkaza izračunava se prema izrazu:
( )QEBP ππλλ ⋅⋅= (9.49)
Zavisnost intenziteta otkaza od temperature za varijabilne kondenzatore prikazana je na slici 9.14.

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
115
λp[(1/106h)] 0.68 0.60 0.51 0.43 0.34 0.26 0.17 0.09
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.14 Zavisnost intenziteta otkaza od temperature kod varijabilnih kondenzatora pri električnom opterećenju 0.5
Mika kondenzatori. Intenzitet mika kondenzatora izračuna se:
( )QCVEBP πππλλ ⋅⋅⋅= (9.50)
Korekcioni faktor CVπ izračunava se:
14.045.0 CCV ⋅=π (9.51)
gde je C kapacitet kondenzatora u PF. Zavisnost intenziteta otkaza od temperature za mika kondenzatore pri električnom opterećenju od 0,5 prikazana je na slici 9.15.

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
116
λp[(1/106h)103] 1.60 1.20 0.80 0.40
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.15 Zavisnost intenziteta otkaza od temperature kod mikro kondenzatora pri električnom opterećenju od 0.5
Stakleni kondenzatori. Intenzitet otkaza staklenih kondenzatora izračunava se prema
formuli:
( )QCVEBP πππλλ ⋅⋅⋅= (9.52)
Korekcioni kapacitivni faktor CVπ izračunava se:
14.062.0 CCV ⋅=π (9.53)
gde je C kapacitet kondenzatora PF. Zavisnost intenziteta otkaza od temperature za staklene kondenzatore prkazana je na slici 9.16.

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
117
λp[(1/106h)10-3] 0.24 0.18 0.12 0.06
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.16 Zavisnost intenziteta otkaza od temperature kod staklenih kondenzatora pri električnom opterećenju od 0.5
Električni kondenzatori. Intenzitet otkaza elektrolitičkih kondenzatora izračunava se:
( )QCVEBP πππλλ ⋅⋅⋅= (9.54)
Kapacitivni korekcioni faktror izračunava se:
18.034.0 CCV ⋅=π (9.55)
gde je C kapacitet kondenzatora PF. Zavisnost intenziteta otkaza od temperature za električni kondenzator prikazan je na slici 9.17.

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
118
λp[1/106h] 0.24 0.18 0.12 0.06
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.17 Zavisnost intenziteta otkaza od temperature kod elektrolitičnih kondenzatora pri električnom opterećenju od 0.5
9.8. Induktivni elementi
Sa stanovišta analize otkaza, indukivni elementi se mogu podeliti u dve osnovne kategorije:
• transformatori • kalemovi
Transformatori. Opšti izraz za nalaženje intenziteta otkaza transformatora je:
( )QEBP ππλλ ⋅⋅= otkaza/106h (9.56)
Bazni intenzitet otkaza Bλ izračunava se :
xB eA ⋅=λ otkaza/106h (9.57)
gde je:
G
T
HS
NTx ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=
273 (9.58)
A-skalirajuća konstanta
NT-temperaturna konsanta
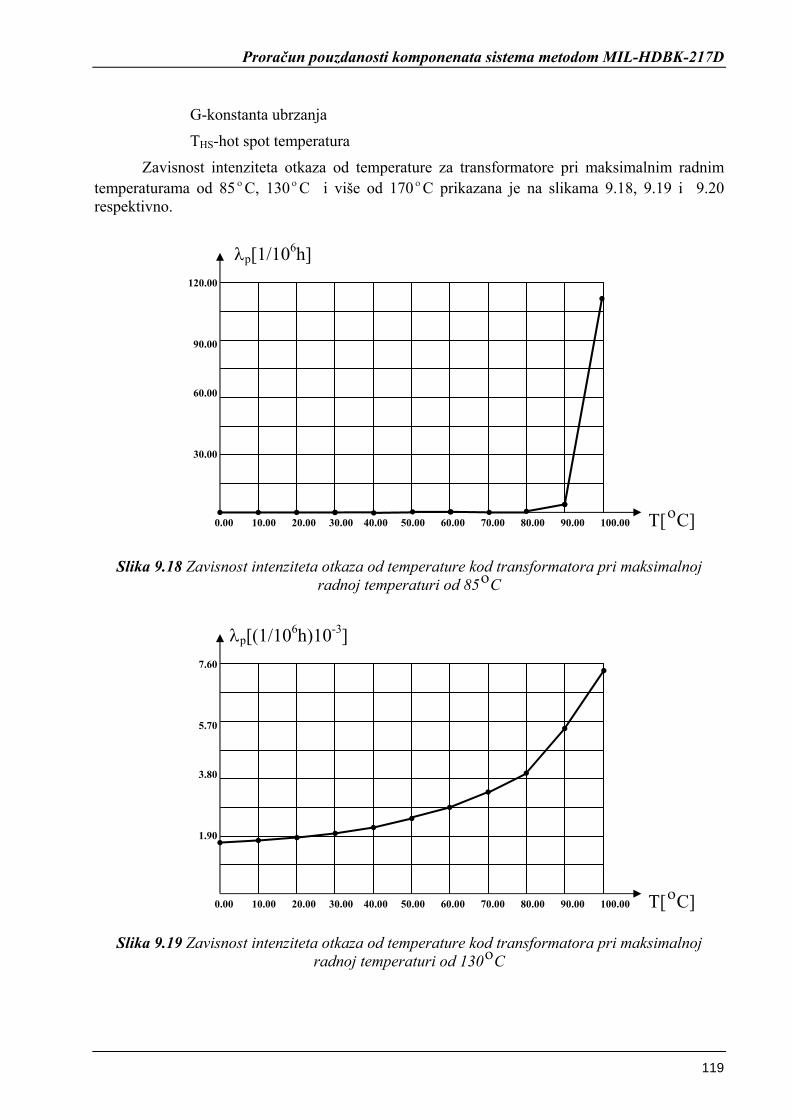
Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
119
G-konstanta ubrzanja
THS-hot spot temperatura
Zavisnost intenziteta otkaza od temperature za transformatore pri maksimalnim radnim temperaturama od 85 ο C, 130 ο C i više od 170 ο C prikazana je na slikama 9.18, 9.19 i 9.20 respektivno.
λp[1/106h]
120.00 90.00 60.00 30.00
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.18 Zavisnost intenziteta otkaza od temperature kod transformatora pri maksimalnoj radnoj temperaturi od 85οC
λp[(1/106h)10-3]
7.60 5.70 3.80 1.90
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.19 Zavisnost intenziteta otkaza od temperature kod transformatora pri maksimalnoj radnoj temperaturi od 130οC

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
120
λp[(1/106h)10-3] 8.00 6.00 4.00 2.00 0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.20 Zavisnost intenziteta otkaza od temperature kod transformatora pri maksimalnoj radnoj temperaturi višoj od 170οC
Slike 9.18, 9.19 i 9.20 su nacrtane za slučaj kada porast temperature iznosi 10 ο C. U slučajevima kada porast temperature iznosi više –intenzitet otkaza je veći.
Kalemovi. Intenzitet otkaza kalemova izračunava se prema izrazu:
( )CQEBP πππλλ ⋅⋅⋅= otkaza/106h (9.59)
Bazni intenzitet otkaza Bλ izračunava se:
xB eA ⋅=λ otkaza/106h (9.60)
gde je :
G
T
HS
NTx ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=
273 (9.61)
skalirajuća konstanta
NT- temperaturna konstanta
G- konstanta ubrzanja
THS- hot spot temperatura
Korekcioni konstrukcioni faktor Cπ zavisi od tipa konstrukicje i iznosi:

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
121
1=Cπ za fiksne
2=Cπ za varijabilne (9.62)
Oblik zavisnosti intenziteta otkaza od temperature pri maksimalnim radnim temperaturama od 85 ο C,130 ο C i višim od 170 ο C isti je kao za transformatore i prikazan je na slikam 9.18.,9.19. i 9.20., dok je opseg vrednosti niži. Tako je pri maksimalnoj radnoj temperaturi od 85 ο C, interval vrednosti za intenzitet otkaza od 0,000011 do 0,0013 otkaza/106h kada se temperaura kreće u intervalu od 0 do 85 ο C. U tom slučaju na temperaturi od 100 ο C intenzitet otkaza iznosi 0,7 otkaza/106h. Pri maksimalnoj radnoj temperaturi od 130 ο C, intenzitet otkaza, kreće se do 0,000011 do 0,000047 otakza/106h kada se temperatura kreće u intervlau od 0 do 100oC.
Ukoliko je maksimalna radna temperatura viša od 170 ο C, pri temperaturnom opsegu od 0 do 100 ο C, intenzitet otkaza, nalazi se u intervlau od 0,000030 do 0,000049 otkaza/106h.
Kod kalemova je, kao i kod transformatora, razmatran slučaj kada porast temperature iznosi 10 ο C. Pri većim porastima temperature i intenzitet otkaza je veći.
9.9. Motori
Analiza otkaza motora u ovom sluaču, zasnivaće se na tipovima motora čija snaga ne prelazi 1 KS (0.73 KW). Uvođenjem pogodnih relacija, ovaj model se može proširiti i na ostale tipove motora.
Intenzitet otkaza motora se računa prema sledećoj formuli:
⎟⎟⎠
⎞⎜⎜⎝
⎛+=
WBP
tαα
λ 13
2
otkaza/106h (9.63)
gde su:
t-vreme rada motora u časovima
Bα - konstanta držanja
Wα - konstanta namotavanja
1
273450020
27323575342
30010
110
−
+−
+−⋅
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
++=
T
TBα (9.64)
83.1273
2357
10−
+= TWα (9.65)
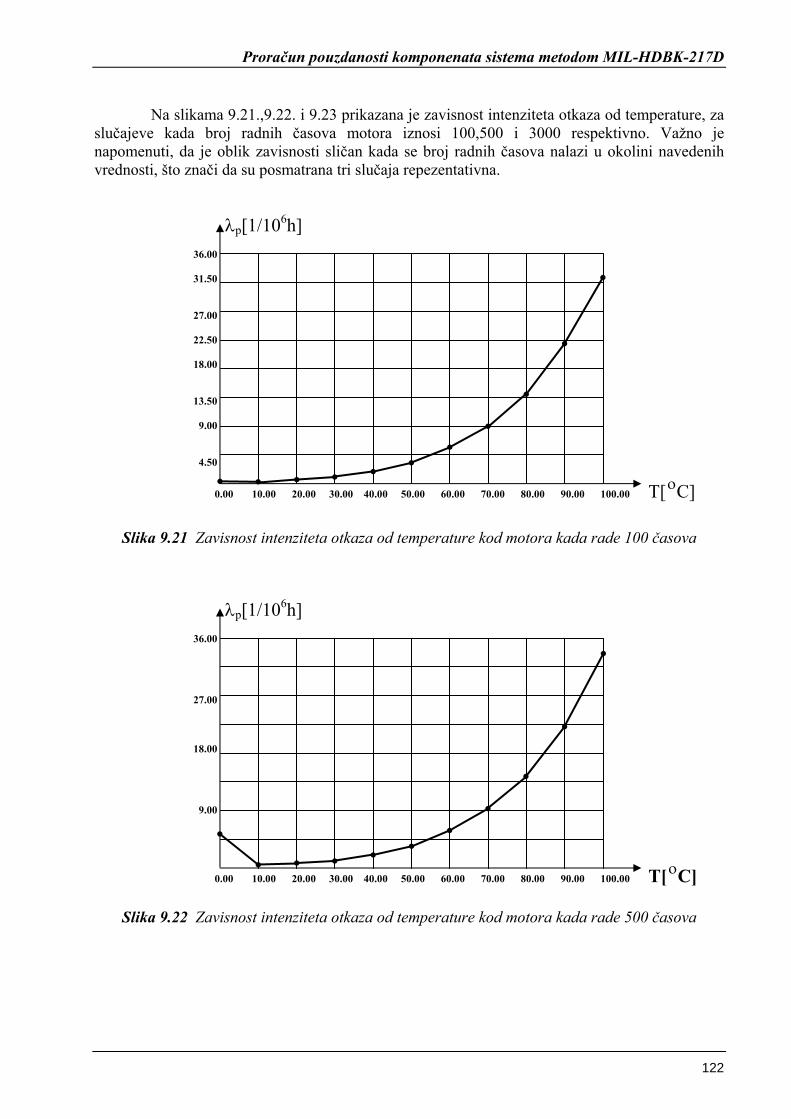
Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
122
Na slikama 9.21.,9.22. i 9.23 prikazana je zavisnost intenziteta otkaza od temperature, za slučajeve kada broj radnih časova motora iznosi 100,500 i 3000 respektivno. Važno je napomenuti, da je oblik zavisnosti sličan kada se broj radnih časova nalazi u okolini navedenih vrednosti, što znači da su posmatrana tri slučaja repezentativna.
λp[1/106h] 36.00 31.50 27.00 22.50 18.00 13.50 9.00 4.50
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.21 Zavisnost intenziteta otkaza od temperature kod motora kada rade 100 časova
λp[1/106h] 36.00 27.00 18.00 9.00
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.22 Zavisnost intenziteta otkaza od temperature kod motora kada rade 500 časova

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
123
λp[1/106h] 200.00 150.00 100.00 50.00
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.23 Zavisnost intenziteta otkaza od temperature kod motora kada rade 3000 časova
9.10. Relea
Intenzitet otkaza relea izračunava se prema izrazu :
( )QFCYCCEBP πππππλλ ⋅⋅⋅⋅⋅= otkaza/106 h (9.66)
Bazni intenzitet otkaza λB izračunava se kao :
LTB πλλ ⋅= otkaza/ 106 h (9.67)
gde su :
xT eA ⋅=λ otkaza/106 (9.68)
yL e=π (9.69)
H
SNSx ⎟⎟
⎠
⎞⎜⎜⎝
⎛= (9.70)
G
TNTy ⎟⎟
⎠
⎞⎜⎜⎝
⎛ +=
273 (9.71)
A – skalirajuća konstanta

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
124
NT – temperaturna konstanta
NS – konstanta poremećaja
H,G – konstante ubrzanja
S – opterećenje
T – temperatura ambijenta
Zavisnost intenziteta otkaza od temperature za relea, kada je električno opterećenje 0.5 i kada postoji 100 prekida na čas, prikazana je na slici 9.24, pri čemu su u konkretnom slučaju vrednosti intenziteta otkaza navedene za armature i magnetska kola.
λp[1/106h]
16.00 12.00 8.00 4.00
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.24 Zavisnost intenziteta otkaza od temperature kod relea pri električnom opterećenju od 0.5
Za sve vrste relea oblik zavisnosti intenziteta otkaza je isti, dok se vrednosti razlikuju, pri
istim temperaturama. Tako se na primer, kod solenoida intenzitet otkaza kreće u intervalu od 2,341 do 27,567 otkaza/106h, kada se temperatura kreće u intervalu od 0 do 100οC. Takođe trba naglasiti da kod svih relea intenzitet otkaza ima linearnu zavisnost od broja prekida na čas
9.11. Prekidači
Intenzitet otkaza prekidačkih kola izračunavamo prema sledećoj formuli :
( )LCYCCEBP ππππλλ ⋅⋅⋅⋅= otkaza/106 (9.72)
Bazni intenzitet otkaza λB zavisi od namene prekidača, odnosno od kvaliteta izrade i nalazi se iz tablice 5.1.11-1 MIL-HDBK-217D. Faktor πL se izračunava prema izrazu:

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
125
2
8.0⎟⎠⎞
⎜⎝⎛
=S
L eπ za rezistivne prekidače
2
4.0⎟⎠⎞
⎜⎝⎛
=S
L eπ za induktivne prekidače (9.73)
2
2.0⎟⎠⎞
⎜⎝⎛
=S
L eπ za svetleće prekidače
gde je S strujno opterećenje. Zavisnost intenziteta otkaza strujnog opterećenja prikazana je na slici 9.25 pri čemu je uzeto da broj prekidača na čas iznosi 100.
λp[1/106h] 16.0 12.8 9.6 6.4 3.2
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0 S
Slika 9.25 Zavisnost intenziteta otkaza od strujnog opterećenja kod prekidača
Intenzitet otkaza ne zavisi od temperature, dok od broja prekida na čas zavisi linearno.
9.12. Konektori
Intenzitet otkaza za ovu grupu elemenata izračunava se po formuli :
( )PKEBP πππλλ ⋅⋅⋅= otkaza/106 (9.74)
Bazni intenzitet otkaza λB izračunava se kao:
xB eA ⋅=λ otkaza/106h (9.75)
gde su :

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
126
⎟⎟⎠
⎞⎜⎜⎝
⎛ ++
+=
0
273273 T
TT
Nx T (9.76)
A – skalirajuća konstanta
NT-temperatuna konstanta
P- konstanta ubrzanja
T-radna tempereatura
Radna temperatura T izračunava se:
TTT A Δ+= (9.77)
gde su:
TA- temperatura amibijenta
TΔ - porast temperature u zavisnosti od jačine struje koja protekne kroz kontakt i očitava se iz tablice 5.1.12.1-4 MIL-HDBK-217D.
Multiplikativni intenzitet otkaza Pπ izračunava se prema formuli:
51064.010
1⎟⎠⎞
⎜⎝⎛ −
=N
P eπ (9.78)
gde je N broj aktivnih kontakata. Zavisnost intenziteta otkaza od temperature za konektore
λp[1/106h] 2.00 1.50 1.00 0.50
0.00 10.00 20.00 30.00 40.00 50.00 60.00 70.00 80.00 90.00 100.00 T[οC]
Slika 9.26 Zavisnost intenziteta otkaza od temperature kod konektora

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
127
prikazana je na slici 9.26, pri čemu je uzeto da je broj aktivnih kontakata 100, a broj uključenja/isključenja na 1000 časova rada, 50. Pri povećanju broja aktivnih kontakata i broja uključenja/iskljuenja na 1000 časova, raste i intenzitet otkaza. Konkretne vrednosti na grafiku odnose se na teflonske konektore.
9.13. Štampane ploče
U okviru analize otkaza sistema, štampane ploče možemo podeliti u dve osnovne grupe:
• dvostrane
• višeslojne ploče
Intenzitet otkaza za ovu grupu elemenata izračunava se prema formuli:
EBP N πλλ ⋅⋅= otkaza/106h (9.79)
gde je N broj obloga.
Bazni intenzitet otkaza Bλ zavisi od tipa ploče i iznosi:
6106 −⋅=Bλ otkaza/106h za dvostrane ploče
4105 −⋅=Bλ otkaza/106h za dvostrane ploče (9.80)
9.14. Spojevi
U okviru anliza otkaza sistema, spojeve možemo podeliti u tri osnovne kategorije:
• žičani
• lemljeni
• savitljivi
Intenzitet otkaza spoja izračunava se na sledeći način:
( )QTEBP πππλλ ⋅⋅⋅= otkaza/106h (9.81)
Korekcioni faktori tipa obrade Tπ i kvaliteta kod žičanih lemljenih spojeva iznose:
1== QT ππ (9.82)

Proračun pouzdanosti komponenata sistema metodom MIL-HDBK-217D
128
Konkretne vrednosti za intenzitet otkaza pojedinih spojeva su sledeće:
=Pλ 0,000003 za žičane spojeve,
=Pλ 0,000080 za lemljene spojeve,
=Pλ 0,002600 za ručno lemljene spojeve,
=Pλ 0,000260 za savitljive spojeve,
=Pλ 0,001300 za varene spojeve.
9.15. Ostali elementi
Vibratori : - 60-to ciklični 15=Pλ otkaza/106h
- 120-to ciklični 20=Pλ otkaza/106h
- 400-to ciklični 40=Pλ otkaza/106h
Kvarcni kristali. 2.0=Pλ otkaza/106h
Lampe : -neonske 2.0=Pλ otkaza/106h
-sa ugljen dioksidom 1=Pλ otkaza/106h
Mikrotalasni elmenti. 1.0=Pλ otkaza/106h
Optički kablovi. 1.0=Pλ otkaza/106h
Osigurači. 1.0=Pλ otkaza/106h

Proračun pouzdanosti pomoću Markovljevih modela
129
10. PRORAČUN POUZDANOSTI POMOĆU MARKOVLJEVIH MODELA
Za određivanje pouzdanosti i raspoloživosti nekog sistema bitno je definisati konfiguraciju
elemenata u sistemu, način rada, proces otkaza elemenata, stanja koja predstavljaju otkaz sistema, kao i da li se sistem može svrstati u nepopravljive sisteme (kada se ne dozvoljava zamena ili održavanje otkazalog elementa), odnosno popravljive sisteme (kada se dozvoljava zamena ili održavanje otkazalog elementa). Pretpostavka da se u određenom trenutku vremena sistem nalazi u jednom od konačnog broja stanja i da elementi otkazuju stohastički tj. po eksponencijalnoj raspodeli, omogućava primenu teorije Markova za određivanje pouzdanosti i raspoloživosti sistema, odnosno primenu Markovljevih algoritama za proračun pouzdanosti i raspoloživosti sistema.
10.1. Markovljevi modeli
Markovljevi modeli su funkcije dve slučajne promenljive veličine: stanja sistema Χ ( )t i vremena posmatranja tog sistema t . One mogu biti diskretne ili kontinualne slučajne promenljive veličine. U zavisnosti od tipa slučajnih promenljivih veličina, Markovljevi modeli mogu imati četiri različita oblika:
1. obe slučajne promenljive veličine ( )( )ttX ; su diskretnog tipa; 2. slučajna promenljiva veličina X ( )t ja kontinualnog tipa, a slučajna promenljiva
veličina t je diskretnog tipa; 3. slučajna promenljiva veličina X ( )t je diskretnog tipa, dok je slučajna promenljiva
veličina t kontinualnog tipa; 4. obe slučajne promenljive veličine ( )( )ttX ; su kontinualnog tipa;
Modeli Markova, gde je slučajna promenljiva veličina t diskretnog tipa, nazivaju se nizovi (lanci) Markova (1; 2), dok se modeli Markova sa slučajnom promenljivom veličinom t kontinualnog tipa zovu procesi Markova (3; 4). Sa aspekta pouzdanosti i raspoloživosti sistema, od značaja je proces Markova gde je stanje sistema ( )tX slučajna promenljiva veličina diskretnog tipa, a vreme t slučajna promenljiva veličina kontinualnog tipa.
Model Markova je definisan skupom verovatnoća pij prelaska sistema iz stanja i u stanje j, gde i i j mogu biti bilo koja stanja u kojima se sistem može nalaziti, pri čemu ta verovatnoća zavisi samo od stanja i i j (od stanja iz kojeg prelazi i stanja u koje prelazi) i nijednog drugog.
10.1.1. Poasonov proces
Poasonov proces je specijalni slučaj procesa Markova, odnosno model sa diskretnim stanjem sistema i kontinualnim vremenom. U Poasonovom procesu od značaja je broj događaja u

Proračun pouzdanosti pomoću Markovljevih modela
130
toku vremena, gde je verovatnoća jednog događaja u malom intervalu Δt jednaka λ∆t, pri čemu je λ konstantno.
Događaji se dešavaju jedan za drugim po određenom redu i diskretnog su tipa, dok je vreme kontinualnog tipa.
Da bi mogli matematički da se definišu Poasonovi procesi, uvode se pretpostavke:
1. verovatnoća prelaska iz stanja sa i događaja u stanje sa i+1 događaja, u toku vremenskog intervala ∆t, jednaka je proizvodu neke konstante λ i vremenskog intervala ∆t, tj. iznosi λ∆t. Parametar λ označava događaje u jedinici vremena, dok sa stanovišta pouzdanosti predstavlja intenzitet otkaza (otkaz / čas);
2. svi događaji su međusobno nezavisni, tj. događaji su nezavisni jedan u odnosu na drugi;
3. događaji su nepovratni, tj. broj događaja, odnosno broj otkaza, raste sa vremenom (kada se razmatraju nepopravljivi sistemi gde se posle otkaza ne vrši održavanje, odnosno gde ne može biti povratka u prethodno stanje);
4. verovatnoća dva ili više događaja u vremenskom intervalu ∆t je zanemarljiva, tj. približno je jednaka nuli;
Shodno tome, iz sistema diferencijalnih jednačina koje predstavljaju verovatnoće stanja i verovatnoće prelaza, može se doći do opšteg izraza za verovatnoću od n događaja koji su se desili u toku vremena t, u oznaci P ( )tnX ,= =Pn ( )t .
Verovatnoća da se u vremenu t + ∆t nije desio nijedan događaj, odnosno da se sistem nađe u nultom stanju jednaka je proizvodu verovatnoće da se nije dogodio nijedan događaj u vremenu t i verovatnoće da se nije odigrao nijedan događaj u vremenu ∆t:
P0(t+∆t) = P0(t)(1-λ∆t) (10.1)
Po istom principu, verovatnoća da se dogodio jedan događaj u vremenu t + ∆t, jednaka je zbiru verovatnoće da se nijedan događaj nije desio u vremenu t i da se jedan događaj odigrao u vremenu ∆t i verovatnoće da se jedan događaj desio u vremenu t i potom nijedan u intervalu ∆t:
P1(t+∆t) = P0(t)λ∆t + P1(1-λ∆t) (10.2)
Uopštenjem se dobija da je:
Pn(t+∆t) = Pn-1(t)λ∆t + Pn(t)(1- λ∆t) (10.3)
gde je n = 1, 2, 3, ... n
Očigledno je da je vreme podeljeno na intervale ∆t, tj. da je diskretnog tipa. S obzirom da se želi da t bude kontinualna veličina, mora se naći granična vrednost za ∆t → 0.
Na taj način se modifikuje sistem diferencijalnih jednačina u onaj koji odgovara Poasonovom procesu sa kontinualnim vremenom. Iz jednačine koja određuje verovatnoću da se nijedan događaj nije desio sledi:

Proračun pouzdanosti pomoću Markovljevih modela
131
( ) ( ) ( )tPt
tPttP0
00 λ−=Δ
−Δ+ (10.4)
Kada ∆t → 0 dobija se:
( ) ( ) ( )( )tPt
tPttP0
0t
00
0tlimlim λ−=
Δ−Δ+
→Δ→Δ (10.5)
odnosno
( ) ( )tPdt
tdP0
0 λ−= (10.6)
Analogno tome, za jedan događaj se dobija:
( ) ( ) ( ) ( )tPtPt
tPttP10
11 λλ −=Δ
−Δ+ (10.7)
a kada ∆t → 0:
( ) ( ) ( ) ( )( )tPtPt
tPttPtt
100
11
0limlim λλ −=
Δ−Δ+
→Δ→Δ (10.8)
odnosno
( ) ( ) ( )tPtPdt
tdP10
1 λλ −= (10.9)
Generalno:
( ) ( ) ( )tPtPdt
tdPnn
n λλ −= − 1 (10.10)
gde je n = 1, 2, 3, ...n.
Jednačine:
( ) ( ) ( ) ( ) ( ) 1,2,3,...nn za ; 100
=−=−= − tPtPdt
tdPtPdt
tdPnn
n λλλ (10.11)
čine kompletan skup diferencijalnih jednačina koje uz skup početnih uslova, koji određuju u kom je stanju bio sistem u početnom trenutku posmatranja (npr. ako nema događaja na početku - stanje nula P0(0)=1, P1(0)=P2(0)=P3(0)= ... =Pn(0) ), definišu Poasonov proces.

Proračun pouzdanosti pomoću Markovljevih modela
132
Ovaj sistem diferencijalnih jednačina može se rešavati na razne načine: metodom Laplasovih transformacija, metodom matrica, metodom neodređenih koeficijenata itd. Metod rešavanja je proizvoljan ali uvek treba birati najpogodniji.
Primenimo metodu neodređenih koeficijenata. Jednačina 10.6
( ) ( )tPdt
tdP0
0 λ−=
je homogena diferencijalana jednačina sa opštim rešenjem oblika rtAe čijom zamenom u prethodnu jednačinu se dobija:
rtrtrt
AeAredtAed λ−==
][ (10.12)
Dakle, očigledno je da je r = -λ što daje:
( ) tAetP λ−=0 (10.13)
Uzimajući u obzir početni uslov P0(0)=1 dobija se:
( ) 100 == AP (10.14)
Znači, krajnji izraz za P0(t) je:
( ) tetP λ−=0 (10.15)
Za n = 1 jednačina je oblika (10.9):
( ) ( ) ( )tPtPdt
tdP10
1 λλ −=
Zamenom konačnog izraza za P0(t) i sređivanjem dobija se diferencijalna jednačina sledeće forme:
( ) ( ) tetPdt
tdP λλλ −=+ 11 (10.16)
Opšte rešenje ove nehomogene diferencijalne jednačine sastoji se od zbira opšteg rešenja homogene i partikularnog rešenja nehomogene polazne jednačine. Opšte rešenje homogene jednačine je istog oblika kao i za P0(t), i iznosi tAe λ− . Partikularno rešenje jednačine je oblika
tBte λ− . Posle zamene ovog izraza u prethodnu jednačinu dobija se:

Proračun pouzdanosti pomoću Markovljevih modela
133
ttt
eBtedt
Bted λλλ
λλ −−−
=+][ (10.17)
⇒
tttt eBteBteBe λλλλ λλλ −−−− =+− (10.18)
odnosno
tt eBe λλ λ −− = (10.19)
Dakle, dobija se da je B = λ. Rešenje diferencijalne jednačine je sada:
( ) tt teAetP λλ λ −− +=1 (10.20)
Uzimajući u obzir početni uslov P1(0) = 0 dobija se:
( ) 001 == AP (10.21)
Znači, konačno rešenje jednačine za n = 1 je:
( ) ttetP λλ −=1 (10.22)
Analogno, rešavanje diferencijalnih jednačina za rezličite vrednosti n, tj. za n = 2, 3, ..., n daje rešenje oblika:
( ) ( )!nettP
tnn
λλ −= (10.23)
Ovaj izraz predstavlja funkciju gustinu verovatnoće za Poasonovu raspodelu.
Verovatnoće P0(t) da u vremenu t neće biti nijednog događaja, pri čemu pod događajem se podrazumeva otkaz nekog elementa, ne predstavlja ništa drugo do izraz za pouzdanost tog elementa R(t). Funkcija raspodele otkaza F(t) = 1-R(t) = 1-P0(t) = 1- te λ− , čijim se diferenciranjem dobija funkcija gustine otkaza u obliku eksponencijalne raspodele:
( ) ( ) ( ) tt
edted
dttdFtf λ
λλ −
−=
−==
1 (10.24)
Dakle, vreme do prvog otkaza ima eksponencijalnu raspodelu, a pošto su svi događaji, odnosno otkazi, međusobno nezavisni, vreme između dva događaja, tj. otkaza imaće takođe eksponencijalnu raspodelu.

Proračun pouzdanosti pomoću Markovljevih modela
134
10.2. Matrica verovatnoća prelaza
Pokazano je da se, kod procesa Markova, prelazi između pojedinih stanja opisuju skupom diferencijalnih jednačina prvog reda, gde je za određivanje verovatnoća od značaja samo poslednje stanje. Do konstanti u ovim jednačinama može se doći na osnovu matrice verovatnoća prelaza. Pored nepopravljivih sistema, gde nema vraćanja u prethodno stanje, mogu se imati i popravljivi sistemi, tako da sistem može nakon popravke da se vrati u neko prethodno stanje. Zato se uvodi verovatnoća da sistem može iz bilo kojeg stanja preći u bilo koje stanje, odnosno kod Markovljevih modela uvodi se matrica verovatnoće prelaza iz bilo kojeg stanja u bilo koje stanje, koja je predstavljena u tabeli 10.1:
Tabela 10.1 Prikaz matrice verovatnoća prelaza
Krajnja stanja (t+∆t) Početna stanja (t)
0 1 .... N
0 p00 p01 .... p0n
1 p10 p11 .... p1n
…. …. …. …. ….
n pn0 pn1 …. pnn
Verovatnoća prelaza pij je verovatnoća da će sistem u toku vremenskog intervala ∆t preći iz početnog stanja i u kojem se nalazi u trenutku vremena t, u krajnje stanje j u trenutku vremena t + ∆t. Zbir verovatnoća pij po bilo kojoj vrsti mora biti jednak jedinici. Verovatnoća proizvoljnog krajnjeg stanja jednaka je zbiru proizvoda verovatnoće početnog stanja i odgovarajuće verovatnoće prelaza u to krajnje stanje.Na ovaj način se povezuju stanja sistema sa verovatnoćama prelaza.
Na primer:
Pn(t+∆t) = P0(t)p0n+P1(t)p1n+....+Pn(t) (10.25)
Kada se nađu granične vrednosti za ∆t 0→ , dolazi se do odgovarajućih diferencijalnih jednačina. Ukoliko su verovatnoće prelaza pij nezavisne od vremena (mogu da zavise samo od konstantnih parametara sistema i vremenskog intervala ∆t), onda se takav proces naziva homogenim procesom. Ako u homogenom procesu krajnja verovatnoća da se bude u proizvoljnom stanju ne zavisi od početnih uslova, takav proces predstavlja ergodički proces. Ako postoji stanje iz koga se ne može preći ni u jedno drugo stanje, onda se takvo stanje zove apsorpciono stanje.
10.3. Rešavanje jednačina Markova
Kao što je već rečeno, dobijeni sistem diferencijalnih jednačina prvog reda može se rešavati na razne načine, ali se uvek bira najpogodniji. Rešavanje je vrlo jednostavno primenom

Proračun pouzdanosti pomoću Markovljevih modela
135
Laplasovih transformacija i matričnih operacija. Za sistem sa tri stanja, matrica verovatnoća prelaza je kao u tabeli 10.2.
Tabela 10.2 Matrica verovatnoća prelaza Markovljevog procesa za sistem sa tri stanja.
Krajnja stanja (t+∆t) Početna stanja (t)
0 1 2
0 tΔ− 011 λ tΔ01λ 0
1 0 tΔ− 121 λ tΔ12λ
2 0 0 1
Na osnovu osobine matrice da se verovatnoća proizvoljnog krajnjeg stanja može dobiti
kao zbir proizvoda verovatnoće početnog stanja i odgovarajuće verovatnoće prelaza u to krajnje stanje, dolazi se do sledećih jednačina:
( ) ( ) ( )tPtttP 0010 1 Δ−=Δ+ λ
( ) ( ) ( ) ( )tPtttPttP 1120011 1 Δ−+Δ=Δ+ λλ (10.26)
( ) ( ) ( )tPttPttP 21122 +Δ=Δ+ λ
Kada se uzmu granične vrednosti za ∆t 0→ , dobija se odgovarajući sistem diferencijalnih jednačina prvog reda:
( ) ( )
( ) ( ) ( )
( ) ( ) 0
0
0
1122
0011121
000
=−
=−+
=+
tPdt
tdP
tPtPdt
tdP
tPdt
tdP
λ
λλ
λ
(10.27)
Primenom Laplasove transformacije, odnosno diferencijalne toreme iz teorije Laplasovih
transformacija ( ( ) ( )[ ] ( )0ftfSLdt
tdf−→ ), ovaj skup jednačina se može transformisati u drugi
oblik , pogodniji za rešavanje.

Proračun pouzdanosti pomoću Markovljevih modela
136
( ) ( )[ ] ( )
( )[ ] ( ) ( )[ ] ( )
( )[ ] ( )[ ] ( )0
0
0
22112
1112001
0001
PtPSLtPL
PtPLStPL
PtPLS
=+−
=++−
=+
λ
λλ
λ
(10.28)
Predstavljen preko matrica sistem postaje:
( )[ ]( )[ ]( )[ ]
( )( )( )⎥
⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+−
+
000
0000
2
1
0
2
1
0
12
1201
01
PPP
tPLtPLtPL
SS
S
λλλ
λ (10.29)
odnosno:
( )[ ] ( )[ ] ( )[ ][ ] ( ) ( ) ( )[ ]00000
00
2101212
0101
210 PPPS
SS
tPLtPLtPL =⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−+
−+λλ
λλ
(10.30)
Ako se uvedu obeležavanja:
( )[ ] ( )[ ] ( )[ ][ ]
( ) ( ) ( )[ ] ( )10.31 00000
00
210
1212
0101
210
PPPS
SS
tPLtPLtPL
=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡−+
−+==
P
AT λλλλ
dobija se izraz:
PTA = (10.32)
Nakon množenja obe strane sa inverznom kvadratnom matricom A-1 dobija se:
111 PATPATAA −−− == tj. (10.33)
Na osnovu poznate formule za određivanje inverzne kvadatne matrice:
AAA 1
detadj
=− (10.34)
dobija se:

Proračun pouzdanosti pomoću Markovljevih modela
137
( )( ) ( )( )
( )⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
++
+++++
=−
S
SSS
SSSSSS
100
10
1
12
12
12
1201
1201
1201
0
01
λλ
λ
λλλλ
λλλ
λ1A (10.35)
Sada, rešavanjem matrične jednačine, 1PAT −= , dobijaju se rešenja, ( )[ ] ( )[ ] ( )[ ], , , 210 tPLtPLtPL u formi Laplasovih transformacija traženih verovatnoća.
Ukoliko se smatra da nema događaja na početku, tj. uz početne uslove ( ) ( ) ( ) ,00 ,00 ,10 210 === PPP dobija se matrična jednačina:
( )[ ] ( )[ ] ( )[ ][ ]tPLtPLtPL 210
( )( ) ( )( )
( )⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
++
+++++
S
SSS
SSSSSS
100
10
1
12
12
12
1201
1201
1201
0
01
λλ
λ
λλλλ
λλλ
λ
[ ]001= (10.36)
odakle su rešenja:
( )[ ] ( )
( )[ ] ( )( ) ( )
( )[ ] ( )( ) ( )10.39
10.38
10.37 1
1201
12012
1201
011
010
λλλλ
λλλ
λ
++=
++=
+=
SSStPL
SStPL
StPL
Rastavljanjem ovih izraza na koeficijente, tako da budu prikazani u obliku zbira, dobijaju se:
( )[ ]01
01λ+
=S
tPL (10.40)
( )[ ] ( )( ) 11tPL12010112
01
12
0112
01
01
0112
01
1201
011 ⎟
⎠⎞
⎜⎝⎛
+−
+−=
+−−
+−=
++=
λλλλλ
λλλ
λ
λλλ
λ
λλλ
SSSSSS
(10.41)

Proračun pouzdanosti pomoću Markovljevih modela
138
( )[ ] ( )( ) 12
0112
01
01
0112
12
1201
12012
1λλλ
λ
λλλ
λ
λλλλ
+−+
+−−=
++=
SSSSSStPL (10.42)
Nalaženjem inverznih Laplasovih transformacija ( teSS
λλ
−→+
→1 ;11 ) konačno se
dolazi do rešenja, odnosno traženih verovatoća:
( ) tetP 010
λ−= (10.43)
( ) ( )tt 12 01
0112
011
λλλλ
λ −− −−
= eetP (10.44)
( ) tt 12
0112
01 01
0112
122 1 λλ
λλλ
λλλ −−
−+
−−= eetP (10.45)
10.4. Određivanje pouzdanosti nepopravljivih sistema
10.4.1. Oređivanje pouzdanosti nepopravljivog sistema sa jednim elementom
U ovom slučaju sistem se sastoji samo od jednog nepopravljivog elementa x1 tako da ima samo dva moguća stanja: stanje 0 (početno stanje) - sistem ispravan (x1) i stanje 1 (krajnje stanje) - sistem neispravan ( 1x ). Matrica verovatnoća prelaza za sistem sa jednim elementom koji ima dva stanja prikazana je u tabeli 10.3.
Tabela 10.3 Matrica verovatnoća prelaza za sistem sa jednim elementom
Krajnja stanja (t+∆t) Početna stanja (t)
0 1
0 1-λ(t)Δt λ(t)Δt
1 0 1
Na osnovu već poznate osobine matrice verovatnoća prelaza mogu se napisati sledeće jednačine:
( ) ( )( ) ( )tPttttP 00 1 Δ−=Δ+ λ (10.46)
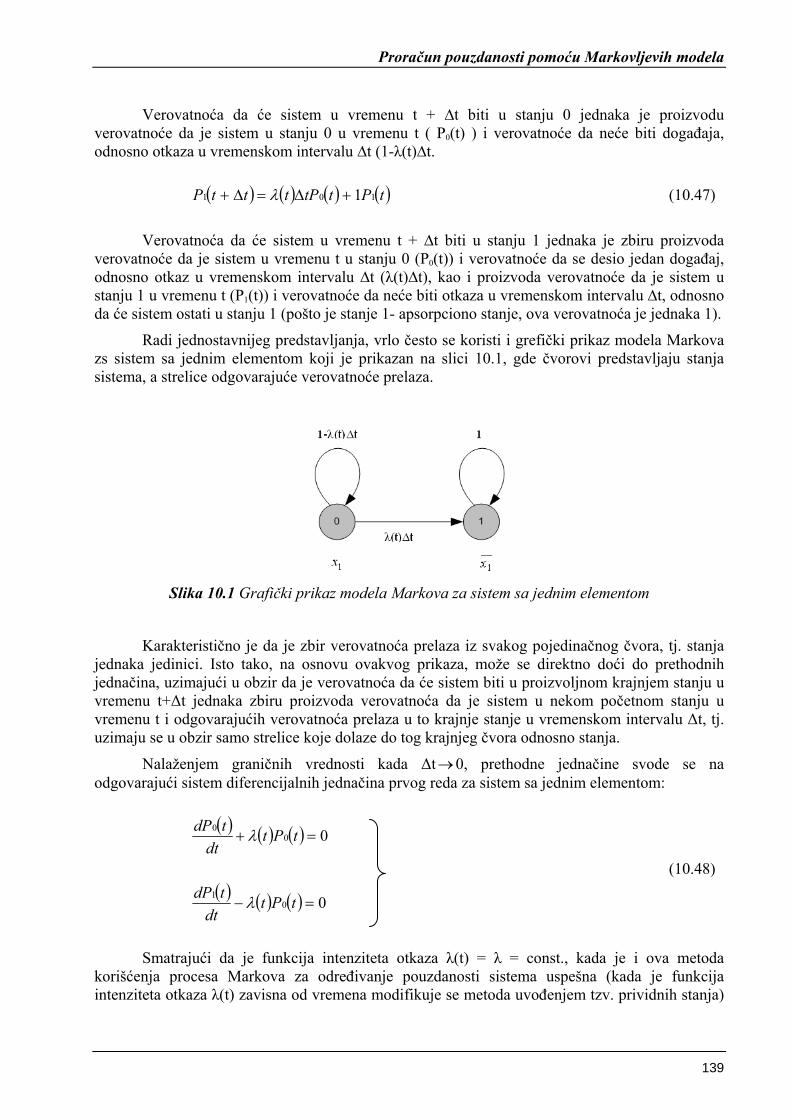
Proračun pouzdanosti pomoću Markovljevih modela
139
Verovatnoća da će sistem u vremenu t + ∆t biti u stanju 0 jednaka je proizvodu verovatnoće da je sistem u stanju 0 u vremenu t ( P0(t) ) i verovatnoće da neće biti događaja, odnosno otkaza u vremenskom intervalu ∆t (1-λ(t)∆t.
( ) ( ) ( ) ( )tPttPtttP 101 1+Δ=Δ+ λ (10.47)
Verovatnoća da će sistem u vremenu t + ∆t biti u stanju 1 jednaka je zbiru proizvoda verovatnoće da je sistem u vremenu t u stanju 0 (P0(t)) i verovatnoće da se desio jedan događaj, odnosno otkaz u vremenskom intervalu ∆t (λ(t)∆t), kao i proizvoda verovatnoće da je sistem u stanju 1 u vremenu t (P1(t)) i verovatnoće da neće biti otkaza u vremenskom intervalu ∆t, odnosno da će sistem ostati u stanju 1 (pošto je stanje 1- apsorpciono stanje, ova verovatnoća je jednaka 1).
Radi jednostavnijeg predstavljanja, vrlo često se koristi i grefički prikaz modela Markova zs sistem sa jednim elementom koji je prikazan na slici 10.1, gde čvorovi predstavljaju stanja sistema, a strelice odgovarajuće verovatnoće prelaza.
Slika 10.1 Grafički prikaz modela Markova za sistem sa jednim elementom
Karakteristično je da je zbir verovatnoća prelaza iz svakog pojedinačnog čvora, tj. stanja jednaka jedinici. Isto tako, na osnovu ovakvog prikaza, može se direktno doći do prethodnih jednačina, uzimajući u obzir da je verovatnoća da će sistem biti u proizvoljnom krajnjem stanju u vremenu t+Δt jednaka zbiru proizvoda verovatnoća da je sistem u nekom početnom stanju u vremenu t i odgovarajućih verovatnoća prelaza u to krajnje stanje u vremenskom intervalu Δt, tj. uzimaju se u obzir samo strelice koje dolaze do tog krajnjeg čvora odnosno stanja.
Nalaženjem graničnih vrednosti kada Δt → 0, prethodne jednačine svode se na odgovarajući sistem diferencijalnih jednačina prvog reda za sistem sa jednim elementom:
( ) ( ) ( )
( ) ( ) ( ) 0
0
01
00
=−
=+
tPtdt
tdP
tPtdt
tdP
λ
λ
(10.48)
Smatrajući da je funkcija intenziteta otkaza λ(t) = λ = const., kada je i ova metoda korišćenja procesa Markova za određivanje pouzdanosti sistema uspešna (kada je funkcija intenziteta otkaza λ(t) zavisna od vremena modifikuje se metoda uvođenjem tzv. prividnih stanja)

Proračun pouzdanosti pomoću Markovljevih modela
140
i uzimajući u obzir početne uslove P0(0) = 1 i P1(0) = 0 (nema događaja tj. otkaza na početku), primena Laplasove transformacije i odgovarajuće diferencijalne teoreme dovodi do:
( ) ( )[ ]
( )[ ] ( )[ ] 0
1
10
0
=+−
=+
tPSLtPL
tPLS
λ
λ (10.49)
Prikazujući jednačine pomoću matrica dobija se:
( )[ ]( )[ ] ⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−+
010
1
0
tPLtPL
SS
λλ
10.50)
odnosno:
( )[ ] ( )[ ][ ] [ ]010
10 =⎥⎦
⎤⎢⎣
⎡ −+S
StPLtPL
λλ (10.51)
Ukoliko se obeleže odgovarajuće matrice sa:
( )[ ] ( )[ ][ ]
[ ] 010
10
=
⎥⎦
⎤⎢⎣
⎡ −+==
P
ATS
StPLtPL
λλ (10.52)
dobija se izraz:
PTA = (10.53)
Posle množenja leve i desne strane inverznom kvadratnom matricom A-1 sledi:
111 tj. −−− == PATPATAA (10.54)
pri čemu je:
( )
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡++=
−+
⎥⎦
⎤⎢⎣
⎡+
==−
S
SSS
SS
SS
adj10
1
0
0det
1 λλ
λλλ
λλ
AAA (10.55)
Rešavanjem matrične jednačine T=PA-1 dibija se:

Proračun pouzdanosti pomoću Markovljevih modela
141
( )[ ] ( )[ ][ ] [ ] ( )( )⎥⎦
⎤⎢⎣
⎡++
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡++=
λλ
λλ
λλ
SSSS
SSStPLtPL 110
1
0110 (10.56)
Znači rešenja u formi Laplasovih transformacija su:
( )[ ]λ+
=S
tPL 10 (10.57)
( )[ ] ( )λλ+
=SS
tPL 1 (10.58)
Rastavljanjem ovih izraza metodom koeficijenata, odnosno prikazivanjem u obliku zbira dobija se:
( )[ ]
( )[ ]λ
λ
+−=
+=
SStPL
StPL
11
1
1
0
(10.59)
Traženjem već poznatih inverznih Laplasovih transformacija prethodnih izraza dolazi se do konačnog rešenja:
( ) ( )
( ) ( )10.61 1
10.60
1
0
t
t
etP
etP
λ
λ
−
−
−=
=
Očigledno je da je pouzdanost ovog sistema verovatnoća da će sistem u vremenu t biti u stanju 0, tj. ispravan, pa važi R(t) = P0(t), dok je nepouzdanost sistema verovatnoća da će sistem u vremenu t biti u stanju 1, znači neispravan, što odgovara izrazu Q(t) = P1(t).
10.4.2. Određivanje pouzdanosti nepopravljivog sistema sa dva elementa
Sistem od dva nepopravljiva elementa x1 i x2, ne vodeći računa o konfiguraciji, ima četiri moguća stanja: stanje 0 - oba elementa ispravna ( 2 1 xx ), stanje 1 - element x1 neispravan, a element x2 ispravan ( 21 xx ), stanje 2 - element x1 ispravan, a element x2 neispravan ( 21 x x ) i stanje 3 - oba elementa neispravna ( 21 x x ).

Proračun pouzdanosti pomoću Markovljevih modela
142
Matrica verovatnoća prelaza za sistem sa dva elementa koji može imati četiri stanja je data u tabeli 10.4.
Tabela 10.4 Matrica verovatnoća prelaza za sistem sa dva elementa
Krajnja stanja (t + Δt) Početna stanja(t)
0 1 2 3
0 1-[λ01(t)+λ02(t)]Δt λ01(t)Δt λ02(t)Δt 0
1 0 1-λ13(t)Δt 0 λ13(t)Δt
2 0 0 1-λ23(t)Δt λ23(t)Δt
3 0 0 0 1
Grafički prikaz modela Markova za sistem sa dva različita elementa predstavljen je na slici 10.2.
Slika 10.2 Grafički prikaz modela Markova za sistem sa dva različita elementa
Na osnovu matrice ili grafičkog prikaza mogu se dobiti sledeće jednačine:
( ) ( ) ( )[ ]{ } ( )tPtttttP 002010 1 Δ+−=Δ+ λλ (10.62)

Proračun pouzdanosti pomoću Markovljevih modela
143
Verovatnoća da će sistem u vremenu t + Δt biti u stanju 0 jednaka je proizvodu verovatnoće da je sistem u vremenu t u stanju 0 ( P0(t) ) i verovatnoće da neće biti otkaza u vremenskom intervalu Δt (1-[λ01(t)+λ02(t)]Δt).
( ) ( ) ( ) ( )[ ] ( )tPttttPtttP 1130011 1 Δ−+Δ=Δ+ λλ (10.63)
Verovatnoća da će sistem u vremenu t + Δt biti u stanju 1 jednaka je zbiru proizvoda verovatnoća da je sistem u vremenu t u stanju 0 ( P0(t) ) i verovatnoće da se desio jedan otkaz tj. prelaz u stanje 1 u vremenskom intervalu Δt ( λ01(t)Δt ), kao i proizvoda verovatnoće da je sistem u vremenu t u stanju 1 (P1(t)) i verovatnoće da neće biti otkaza u vremenskom intervalu Δt (1-λ13(t)Δt).
( ) ( ) ( ) ( )[ ] ( )tPttttPtttP 2230022 1 Δ−+Δ=Δ+ λλ (10.64)
Verovatnoća da će sistem u vremenu t + Δt biti u stanju 2 jednaka je zbiru proizvoda verivatnoće da je sistem u vremenu t u stanju 0 ( P0(t) ) i verovatnoće da se desio jedan otkaz, tj. prelaz u stanje 2 u vremenskom intervalu Δt ( λ02(t)Δt ), kao i proizvoda verovatnoće da je sistem u vremenu t u stanju 2 (P2(t)) i verivatnoće da neće biti otkaza u vremenskom intervalu Δt (1-λ23(t)Δt ).
( ) ( ) ( ) ( ) ( ) ( )tPttPtttPtttP 32231133 1+Δ+Δ=Δ+ λλ (10.65)
Verovatnoća da će sistem u vremenu t + Δt biti u stanju 3, jednaka je zbiru proizvoda verovatnoće da je sistem u vremenu t u stanju 1 ( P1(t) ) i verovatnoće da se desio jedan otkaz u vremenskom intervalu Δt ( λ13(t)Δt ), proizvoda verovatnoće da je sistem u vremenu t u stanju 2 ( P2(t) ), verovatnoće da se desio jedan otkaz u vremenskom intervalu Δt ( λ23(t)Δt ), kao i proizvoda verovatnoće da je sistem u vremenu t u stanju 3 ( P3(t) ) i verivatnoće da neće biti otkaza u vremenskom intervalu Δt, tj. da će sistem ostati u stanju 3 (pošto je stanje 3-apsorpciono stanje, ova verovatnoća jednaka je jedan).
Sada, traženjem graničnih vrednosti ovih jednačina za Δt → 0, može se formirati odgovarajući sistem diferencijalnih jednačina prvog reda, kojima se opisuju stanja sistema, a potom i naći verovatnoće nalaženja u pojedinim stanjima.
( ) ( ) ( )[ ] ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) 0
0
0
0
2231133
2230022
1130011
002010
=−−
=+−
=+−
=++
tPttPtdt
tdP
tPttPtdt
tdP
tPttPtdt
tdP
tPttdt
tdP
λλ
λλ
λλ
λλ
(10.66)

Proračun pouzdanosti pomoću Markovljevih modela
144
Ukoliko na ovaj skup jednačina primenimo Laplasovu transformaciju, tj. odgovarajuću diferencijalnu teoremu, uzimajući u obzir početne uslove P0(0) = 1, P1(0) = P2(0) = P3(0) = 0 (nema otkaza na početku) i smatrajući da je funkcija intenziteta otkaz konstantna λ(t) = λ = const. dobija se:
( ) ( )[ ]
( )[ ] ( ) ( )[ ]
( )[ ] ( ) ( )[ ]
( )[ ] ( )[ ] ( )[ ] 0
0
0
1
3223113
223002
113001
00201
=+−−
=++−
=++−
=++
tPSLtPLtPL
tPLStPL
tPLStPL
tPLS
λλ
λλ
λλ
λλ
(10.67)
Predstavljanje u matričnom obliku omogućava sledeću formu:
( )[ ]( )[ ]( )[ ]( )[ ] ⎥
⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−+−
+−++
0001
000000000
3
2
1
0
23
2302
1301
0201
tPLtPLtPLtPL
SS
SS
λλλ
λλλλ
(10.68)
ili drugačije:
( )[ ] ( )[ ] ( )[ ] ( )[ ][ ]
[ ] (10.69) 0001000
0000
0
2323
1313
02010201
3210
=
=
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−+−+
−−++
SS
SS
tPLtPLtPLtPLλλλλ
λλλλ
Uvodeći poznata obeležavanja:
( )[ ] ( )[ ] ( )[ ] ( )[ ][ ] == AT 3210 tPLtPLtPLtPL
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−+−+
−−++
SS
SS
00000
000
2323
1313
02010201
λλλλ
λλλλ
(10.70)
[ ]0001=P
dobija se izraz:
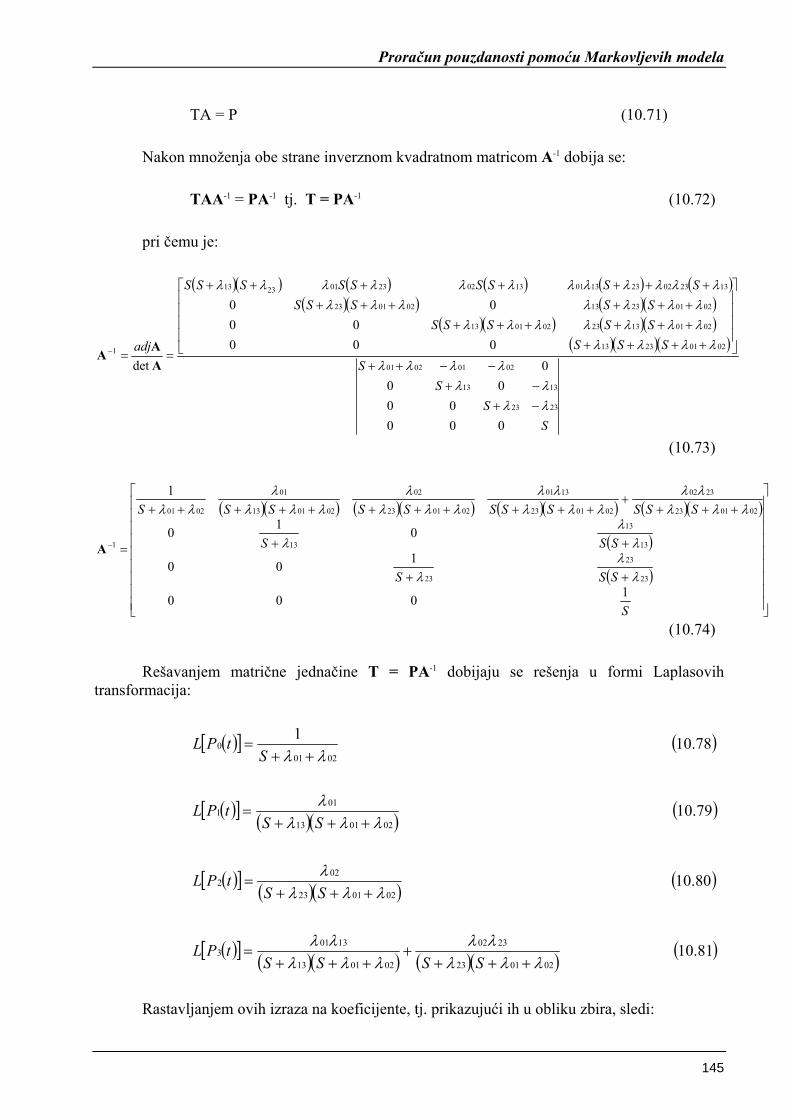
Proračun pouzdanosti pomoću Markovljevih modela
145
TA = P (10.71)
Nakon množenja obe strane inverznom kvadratnom matricom A-1 dobija se:
TAA-1 = PA-1 tj. T = PA-1 (10.72)
pri čemu je:
( )( ) ( ) ( ) ( ) ( )( )( ) ( )( )
( )( ) ( )( )( )( )( )
SS
SS
SSSSSSSSSSSSS
SSSSSSSSS
adj
00000
000
00000
00
det
2323
1313
02010201
02012313
02011323020113
02012313020123
132302231301130223012313
1
λλλλ
λλλλλλλλ
λλλλλλλλλλλλλλ
λλλλλλλλλλλλ
−+−+
−−++
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
++++++++++++++++
+++++++
==−
AA
A
(10.73)
( )( ) ( )( ) ( )( ) ( )( )
( )
( )
⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
++
++
++++
+++++++++++
=−
S
SSS
SSS
SSSSSSSSSSS
1000
100
010
1
23
23
23
13
13
13
020123
2302
020123
1301
020123
02
020113
01
0201
1
λλ
λ
λλ
λ
λλλλλ
λλλλλ
λλλλ
λλλλ
λλ
A
(10.74)
Rešavanjem matrične jednačine T = PA-1 dobijaju se rešenja u formi Laplasovih transformacija:
( )[ ] ( )
( )[ ] ( )( ) ( )
( )[ ] ( )( ) ( )
( )[ ] ( )( ) ( )( ) ( )10.81
10.80
10.79
10.78 1
020123
2302
020113
13013
020123
022
020113
011
02010
λλλλλ
λλλλλ
λλλλ
λλλλ
λλ
++++
+++=
+++=
+++=
++=
SSSStPL
SStPL
SStPL
StPL
Rastavljanjem ovih izraza na koeficijente, tj. prikazujući ih u obliku zbira, sledi:

Proračun pouzdanosti pomoću Markovljevih modela
146
( )[ ]0201
01
λλ ++=
StPL (10.82)
( )[ ] ⎟⎠⎞
⎜⎝⎛
++−
+−+=
020113130201
011
11λλλλλλ
λSS
tPL (10.83)
( )[ ] ⎟⎠⎞
⎜⎝⎛
++−
+−+=
020123230201
022
11λλλλλλ
λSS
tPL (10.84)
( )[ ]23230201
02
13130201
013
111 λλλλ
λλλλλ
λ+
⋅−+
++
⋅−+
−=SSS
tPL
( )( ) 10201230201130201
231323021301
λλλλλλλλλλλλλλ
++⋅
−+−+−+
+S
(10.85)
Primenom inverznih Laplasovih transformacija dobija se konačno rešenje:
( ) ( )tetP 02010
λλ +−= (10.86)
( ) ( )( )tt eetP 020113
130201
011
λλλλλλ
λ +−− −−+
= (10.87)
( ) ( )( )tt eetP 020123
230201
022
λλλλλλ
λ +−− −−+
= (10.88)
( ) +−+
−−+
−= −− tt eetP 23
230201
0213
130201
013 1 λλ
λλλλ
λλλλ
( )( )( )te 0201
230201130201
231323021301 λλ
λλλλλλλλλλλλ +−
−+−+−+
+ (10.89)
Za određivanje pouzdanosti sistema sa dva elementa, potrebno je poznavati konfiguraciju tih elemenata. Ukoliko je u pitanju redna veza elemenata, sistem će biti ispravan kada su svi elementi u njemu ispravni, pa je pouzdanost sistema jednaka verovatnoći da sistem bude u stanju 0, tj.:
( ) ( ) ( )tetPtR 02010
λλ +−== (10.90)
Proračun pouzdanosti pomoću Markovljevih modela
147
Za elemente u paralelnoj vezi, sistem će biti ispravan ukoliko je bar jedan od elemenata u njemu ispravan (jedan element može da otkaže, ali sistem i dalje ispravno funkcioniše), tako da je pouzdanost sistema jednaka zbiru verovatnoća da sistem bude u stanju 0, 1 i 2:
( ) ( ) ( ) ( ) =++= tPtPtPtR 210
( ) ( )( ) ( )( ) 020123
2302
02020113
130201
010201
01
ttttt eeeee λλλλλλλλ
λλλλ
λλλλ +−−+−−+− −
−++−
−++=
(10.91)
Prethodna jednačina se može primeniti i na slučaj kada je jedan element aktivan, a drugi u pripravnosti, ukoliko je λ01 = λ1, λ02 = 0 (pretpostavljamo da element neće otkazati dok je u pripravnosti) i λ13 = λ2. Tada se dobija pouzdanost sistema sa dva elementa od kojih je jedan u pripravnosti.
( ) ( )ttt eeetR 12
21
11 λλλλλ
λ −−− −−
+= (10.92)
Očigledno, složenost Markovljevih algoritama zavisi od broja stanja sistema. Ukoliko ima n elemenata u sistemu, broj stanja sistema m se , evidentno, dobija iz formule
n
nnnn
m 210
=⎟⎟⎠
⎞⎜⎜⎝
⎛++⎟⎟
⎠
⎞⎜⎜⎝
⎛+⎟⎟
⎠
⎞⎜⎜⎝
⎛= Κ . Broj stanja je jednak broju diferencijalnih jednačina prvog reda
koje formiraju sistem čijim rešavanjem se dobija konačno rešenje. U slučaju velikog broja stanja sistema, kada je prilično otežan rad, koristi se računar.
10.5. Pouzdanost i raspoloživost popravljivih sistema
Popravljivi sistemi su oni kod kojih se može vršiti održavanje u određenom vremenskom intervalu, pri cemu se sistem iz stanja otkaza vraća u operativno stanje, a ukoliko se to još može brzo učiniti, efekat otkaza je znatno smanjen. Dakle, kod popravljivih sistema dozvoljava se vreme zastoja, sa tim što popravka pozitivno utiče na sistem. Ipak, kod nekih sistema otkaz može izazvati katastrofu u izvesnom smislu, pa mogućnost opravke nema smisla uzimati u obzir. Kod popravljivih sistema uvodi se funkcija raspoloživosti koja ustvari, predstavlja verovatnoću da sistem raditi u trenutku vremena t, pod uslovom da je bio operativan u vremenu t = 0, dok funkcija pouzdanosti predstavlja verovatnoću rada sistema u intervalu vremena 0 do t. Međutim, funkcija raspoloživosti ne sadrži podatke o broju ciklusa otkaz - popravka do određenog vremenskog trenutka t. Kod popravljivih sistema može se razmatrati i vreme popravke, vreme između otkaza, broj otkaza u nekom intervalu vremena itd.
Evidentno je da je pouzdanost sistema strožiji zahtev od raspoloživosti sistema, tj. R(t) ≤ A(t) (znak jednakosti važi kod nepopravljivih sistema). Mogućnost popravke kod popravljivih sistema sa rednom vezom elemenata ne utiče na pouzdanost sistema R(t), ali zato ima pozitivan efekat na raspoloživost sistema A(t), koja raste. Međutim, kod paralelne veze elemenata u sistemu, odnosno kod sistema sa elementima u pripravnosti, popravka ima pozitivan efekat kako na raspoloživost A(t), tako i na pouzdanost sistema R(t). Da je to zaista tako, zaključuje se iz

Proračun pouzdanosti pomoću Markovljevih modela
148
činjenice da nepopravljiv sistem sa dva elementa otkazuje kada otlažu oba elementa, dok kod popravljivog sistema ako otkaže jedan element, drugi nastavlja da radi, u međuvremenu se popravlja otkazali element i ukoliko se popravi pre otkaza drugog elementa, sistem ponovo neće otkazati i to se ponavlja sve dok je vreme popravke kraće od vremena između otkaza. Ipak, u jednom momentu, to neće biti slučaj i sistem će otkazati. Dakle, posmatrano na ovaj način, očigledno je da popravka povećeva pouzdanost ovkvog sistema.
10.5.1. Pouzdanost i raspoloživost popravljivog sistema sa jednim elementom
U ovom slučaju u pitanju je popravljiv sistem koji se sastoji samo od jednog elementa x1, pri čemu se smatra da je konstantan intenzitet otkaza λ = const. i konstantan intenzitet popravke μ = const. Grafički prikaz modela Markova za pouzdanost ovakvog sistema dat je na slici 10.3.
Slika 10.3 Grafički prikaz modela Markova za pouzdanost popravljivog sistema sa jednim
elementom
Ukoliko se, na osnovu ranije objašnjenih osobina grafičkih prikaza, formiraju odgovarajuće jednačine, dobija se:
( ) ( ) ( )tPtttP 00 1 Δ−=Δ+ λ (10.93)
( ) ( ) ( )tPttPttP 101 1+Δ=Δ+ λ (10.94)
Kada se nađe granična vrednost za Δt→0 dobijaju se diferencijalne jednačine koje su očigledno iste kao za nepopravljiv sistem sa jednim elementom:
( ) ( ) 000
=+ tPdt
tdP λ (10.95)
( ) ( ) 001
=− tPdt
tdP λ (10.96)

Proračun pouzdanosti pomoću Markovljevih modela
149
Primenom Laplasovih transformacija, odnosno odgovarajuće diferencijalne teoreme, vodeći računa o početnim uslovima P0(0) = 1 i P1(0) = 0 (nema otkaza na početku) dolazi se do sledećeg sistema jednačina:
( ) ( )[ ] 10 =+ tPLS λ (10.97)
( )[ ] ( )[ ] 010 =+− tPSLtPLλ (10.98)
Prikazujući jednačine pomoću matrica sledi:
( )[ ]( )[ ] ⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−+
010
1
0
tPLtPL
SS
λλ
(10.99)
odnosno:
( )[ ] ( )[ ][ ] [ ]010
10 =⎥⎦
⎤⎢⎣
⎡ −+S
StPLtPL
λλ (10.100)
Ako se obeleže odgovarajuće matrice sa:
( )[ ] ( )[ ][ ]
[ ] ( )10.101 010
10
=
⎥⎦
⎤⎢⎣
⎡ −+==
P
ATS
StPLtPL
λλ
dobija se izraz:
TA=P (10.102)
Množenjem obe strane sa inverznom kvadratnom matricom A-1 sledi:
TAA-1 = PA-1 tj. T = PA-1 (10.103)
gde je:
( )
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡++==−
S
SSSadj10
1
det1 λ
λλ
AAA (10.104)
Rešavanjem matrične jednačine T = PA-1 dobijaju se rešenja u formi Laplasovih transformacija:

Proračun pouzdanosti pomoću Markovljevih modela
150
( )[ ]λ+
=S
tPL 10 (10.105)
( )[ ] ( ) λλλ
+−=
+=
SSSStPL 11
1 (10.106)
Primenom inverznih Laplasovih transformacija nalaze se krajnja rešenja:
( ) tetP λ−=0 (10.107)
( ) tetP λ−−= 11 (10.108)
Izraz za pouzdanost ovog sistema R(t) = P0(t) = e-λt je očigledno identičan sa izrazom za pouzdanost nepopravljivog sistema sa jednim elementom, iz čega se vidi da popravka ovde nema uticaja na samu pouzdanost jer je nakon otkazivanja element u apsorpcionom stanju i ne može se vratiti u prethodno stanje.
Grafički prikaz modela Markova za raspoloživost popravljivog sistema sa jednim elementom dat je na slici 10.4.
Slika 10.4 Grafički prikaz modela Markova za raspoloživost popravkljivog sistema sa jednim
elementom
Jednačine koje proizilaze iz ovog grafičkog prikaza su:
( ) ( ) ( ) ( )ttPtPtttP 100 1 Δ+Δ−=Δ+ μλ (10.109)
( ) ( ) ( ) ( )tPtttPttP 101 1 Δ−+Δ=Δ+ μλ (10.110)
Granična vrednost za Δt→0 dovodi do sledećih diferencijalnih jednačina:
( ) ( ) ( ) 0100
=−+ tPtPdt
tdP μλ (10.111)

Proračun pouzdanosti pomoću Markovljevih modela
151
( ) ( ) ( ) 0011
=−+ tPtPdt
tdP λμ (10.112)
Uz primenu Laplasove transformacije, poznate diferencijalne teoreme i početnih uslova P0(0) = 1 i P1(0) = 0 sledi:
( ) ( )[ ] ( )[ ] 110 =−+ tPLtPLS μλ (10.113)
( )[ ] ( ) ( )[ ] 010 =++− tPLStPL μλ (10.114)
Uvodeći matrice dobija se:
( )[ ]( )[ ] ⎥
⎦
⎤⎢⎣
⎡=⎥
⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡+−
−+01
1
0
tPLtPL
SS
μλμλ
(10.115)
tj.
( )[ ] ( )[ ][ ] [ ]0110 =⎥⎦
⎤⎢⎣
⎡+−
−+μμ
λλS
StPLtPL (10.116)
Pomoću matričnih obeležavanja:
( )[ ] ( )[ ][ ]
[ ] ( )10.117 01
10
=
⎥⎦
⎤⎢⎣
⎡+−
−+==
P
ATμμ
λλS
StPLtPL
formira se matrična jednačina:
TA =P (10.118)
Dejstvujući inverznom kvadratnom matricom A-1 na obe strane sledi:
TAA-1 = PA-1 tj. T = PA-1 (10.119)
pri čemu je :
( ) ( )
( ) ( )⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
+++
++
+++++
=
+−−+
⎥⎦
⎤⎢⎣
⎡+
+
==−
μλλ
μλμ
μλλ
μλμ
μμλλλμ
λμ
SSS
SS
SSSSS
SS
SS
adjAAA
det1 (10.120)

Proračun pouzdanosti pomoću Markovljevih modela
152
Rešenje matrične jednačine T = PA-1 dobija se u formi Laplasovih transformacija:
( )[ ] ( )μλμ++
+=
SSStPL 0 (10.121)
( )[ ] ( )μλλ
++=
SStPL 1 (10.122)
tj. rastavljanjem na koeficijente sledi:
( )[ ]μλ
μλλ
μλμ
+++++=
SStPL 0 (10.123)
( )[ ] ⎟⎟⎠
⎞⎜⎜⎝
⎛++
−+
=++
+−+=μλμλ
λμλ
μλλ
μλλ
SSSStPL 11
1 (10.124)
Nalaženjem inverznih Laplasovih transformacija dobija se:
( ) ( )tetP μλ
μλλ
μλμ +−
++
+=0 (10.125)
( ) ( ) ( )( )tt eetP μλμλ
μλλ
μλλ
μλλ +−+− −
+=
+−
+= 11 (10.126)
Funkcija raspoloživosti, očigledno, je data jednačinom:
( )tA = ( ) ( )tetP μλ
μλλ
μλμ +−
++
+=0 (10.127)
i predstavljena je na slici 10.5.

Proračun pouzdanosti pomoću Markovljevih modela
153
Slika 10.5 Funkcija raspoloživosti za sistem sa jednim elementom
Razumljivo je da je za t → ∞ sve funkcije pouzdanosti teže nuli. Međutim, karakteristično je da sve funkcije raspoloživosti u istom slučaju teže određenoj konstantnoj vrednosti A - raspoloživost u stanju ravnoteže. U ovom slučaju, za sistem sa jednim elementom dobija se:
( )μλ
μ+
==∞→
tAAtlim (10.128)
10.5.2. Pouzdanost i raspoloživost popravljivog sistema sa rednom vezom dva elementa
Kod proračunavanja pouzdanosti i raspoloživosti popravljivog sistema sa dva elementa, mora se voditi računa o konfiguraciji elemenata u sistemu, odnosno da li su u rednoj vezi, paralelnoj vezi ili je možda jedan od elemenata aktivan, dok je drugi u rezervi.
Ovde se razmatra slučaj popravljivog sistema sa rednom vezom dva elementa koje karakteriše isti intenzitet otkaza λ = const. i isti intenzitet popravke μ = const. (neka postoji samo jedno mesto - radionica gde se vrši popravka otkazalog elementa). Postoje tri moguća stanja; sistem radi: stanje 0 - oba elementa ispravna; sistem ne radi: stanje 1 - jedan element neispravan, a drugi ispravan (smatra se da su elementi identični) i stanje 2 - oba elementa neispravna.
Kao što je već ranije naglašeno, kod sistema sa rednom vezom elemenata mogućnost popravke nema uticaja na funkciju pouzdanosti. Upravo zbog toga, matrica verovatnoća prelaza popravljivog sistema sa rednom vezom dva elementa ista je kao kod nepopravljivog sistema sa istom konfiguracijom elemenat i data je u tabeli 10.5.

Proračun pouzdanosti pomoću Markovljevih modela
154
Tabela 10.5 Matrica verovatnoća prelaza za pouzdanost popravljivog sistema sa rednom vezom dva elementa
Krajnja stanja (t+Δt) Početna stanja (t) 0 1 2
0 1-2λΔt 2λΔt 0
1 0 1-λΔt λΔt
2 0 0 1
Na osnovu matrice mogu se napisati jednačine:
( ) ( ) ( )ttPttP 00 21 Δ−=Δ+ λ (10.129)
( ) ( ) ( ) ( )tPtttPttP 101 12 Δ−+Δ=Δ+ λλ (10.130)
( ) ( ) ( )tPttPttP 212 1+Δ=Δ+ λ (10.131)
odnosno za Δt→0:
( ) ( ) 02 00
=+ tPdt
tdP λ (10.132)
( ) ( ) ( ) 02 011
=−+ tPtPdt
tdP λλ (10.133)
( ) ( ) 012
=− tPdt
tdP λ (10.134)
Uz npr. primenu Laplasovih transformacija, matričnog računa i inverznih Laplasovih transformacija može se, na već prethodno opisan način kao kod nepopravljivog sistema sa dva elementa, doći do konačnog rešenja za verovatnoće P0(t), P1(t) i P2(t), odnosno do izraza za pouzdanost ovakvog sistema R(t) = P0(t) = e-2λt.
Matrica verovatnoća prelaza za raspoloživost popravljivog sistema sa dva elementa u rednoj vezi data je u tabeli 10.6.

Proračun pouzdanosti pomoću Markovljevih modela
155
Tabela 10.6 Matrica verovatnoća prelaza za raspoloživost sistema sa rednom vezom dva elementa
Krajnja stanja (t+Δt) Početna stanja (t)
0 1 2
0 1–2λΔt 2λΔt 0
1 μΔt 1–(λ+μ)Δt λΔt
2 0 μΔt 1–μΔt
Na već poznat način mogu se formirati jednačine:
( ) ( ) ( ) ( )ttPttPttP 100 21 Δ+Δ−=Δ+ μλ (10.135)
( ) ( ) ( )[ ] ( ) ( )ttPtPtttPttP 2101 12 Δ+Δ+−+Δ=Δ+ μμλλ (10.136)
( ) ( ) ( ) ( )tPtttPttP 212 1 Δ−+Δ=Δ+ μλ (10.137)
tj. za Δt → 0 dobija se:
dttdP )(0 ( ) ( ) 02 10 =−+ tPtP μλ (10.138)
dttdP )(1 ( ) ( ) ( ) ( ) 02 201 =−−++ tPtPtP μλμλ (10.139)
dttdP )(2 ( ) ( ) 012 =−+ tPtP λμ (10.140)
Opet, identično ranijim postupcima rešavanja ovakvih sistema diferencijalnih jednačina, uz primenu Laplasovih transformacija, početnih uslova, matričnog računa i na kraju inverznih Laplasovih transformacija, dobijaju se konačne verovatnoće nalaženja u pojedinim stanjima P0(t), P1(t) i P2(t). Raspoloživost sistema je data izrazom A(t) = P0(t). Međutim, prevashodno je od interesa raspoloživost sistema u stanju ravnoteže koja se dobija za t → ∞. Ova vrednost ne zavisi od početnog stanja, pa zato nije neophodno poznavati početne uslove. Upravo zbog toga, a i zbog činjenice da funkcija raspoloživosti u stanju ravnoteže dostiže konstantnu vrednost, može se pronaći ne rešavajući direktno prethodni sistem jednačina. Naime, za procese sa kontinualnim prelazima u vremenu važi:
( ) iit
PtP =∞→
lim odnosno ( ) 0lim =∞→ dt
tdPi
t (10.141)

Proračun pouzdanosti pomoću Markovljevih modela
156
Uzimajući u obzir prethodne uslove i tražeći graničnu vrednost sistema diferencijalnih jednačina za t → ∞, formira se sistem algebarskih jednačina:
02 10 =+− PP μλ (10.142)
( ) 02 210 =++− PPP μμλλ (10.143)
021 =− PP μλ (10.144)
Rešavanjem sistema po P0, P1, P2 uz uslov P0 + P1 + P2 = 1 (s obzirom da su samo dve od tri prethodne jednačine nezavisne), dobija se verovatnoća nalaženja sistema u stanjima 0, 1, 2 u stanju ravnoteže, kada t → ∞.
=0P 22
2
22 λλμμμ
++ (10.145)
=1P 22 222
λλμμλμ
++ (10.146)
=2P 22
2
222
λλμμλ
++ (10.147)
Dakle, raspoloživost ovog sistema u stanju ravnoteže data je izrazom:
( ) ( ) ====∞→∞→
PtPtAAtt
0limlim 22
2
22 λλμμμ
++ (10.148)
10.5.3. Pouzdanost i raspoloživost popravljivog sistema sa paralelnom vezom dva elementa ili sa jednim aktivnim elementom i jednim elementom u
pripravnosti
Kao što je već ranije rečeno, kod paralelne veze elemenata u sistemu, i kod sistema sa elementima u pripravnosti, popravka ima pozitivan efekat kako na raspoloživost A(t), tako i na pouzdanost sistema R(t).
Konkretno, ovde se razmatra popravljiv sistem sa paralelnom vezom dva elementa za slučaj konstantnog intenziteta otkaza i intentiteta popravke. Grafički prikaz modela Markova za pouzdanost ovog sistema dat je na slici 10.6.
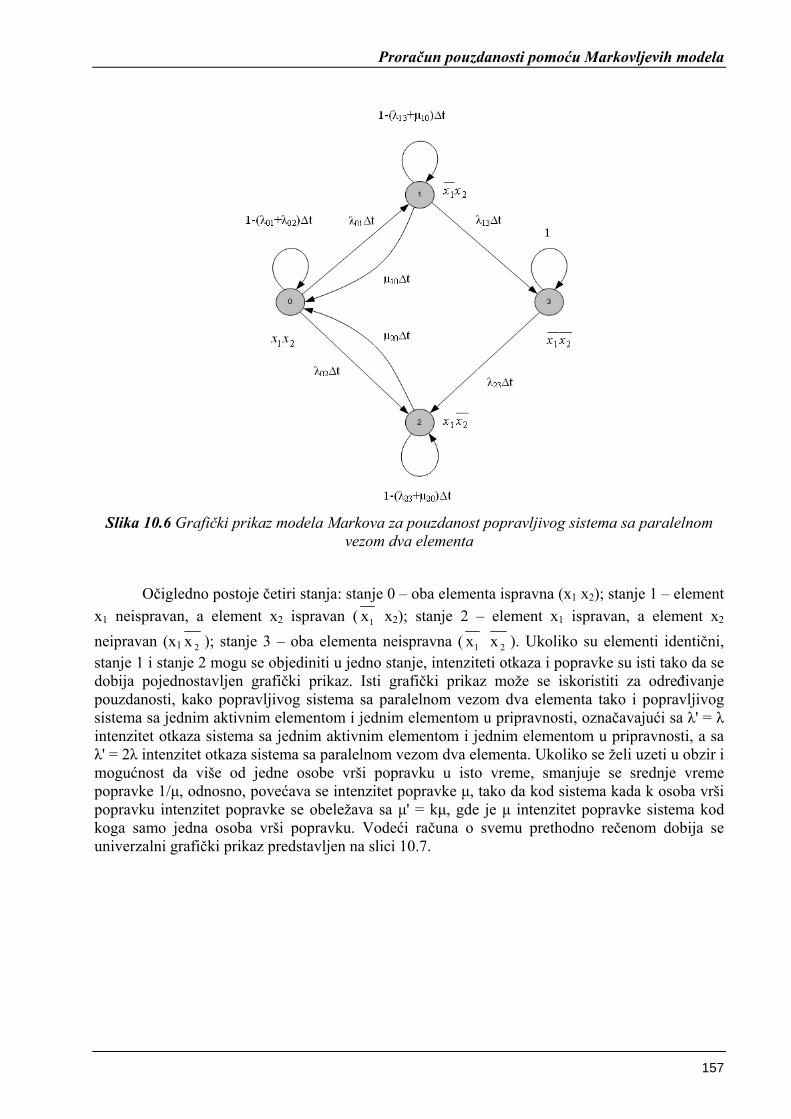
Proračun pouzdanosti pomoću Markovljevih modela
157
Slika 10.6 Grafički prikaz modela Markova za pouzdanost popravljivog sistema sa paralelnom
vezom dva elementa
Očigledno postoje četiri stanja: stanje 0 – oba elementa ispravna (x1 x2); stanje 1 – element x1 neispravan, a element x2 ispravan ( 1x x2); stanje 2 – element x1 ispravan, a element x2 neipravan (x1 2x ); stanje 3 – oba elementa neispravna ( 1x 2x ). Ukoliko su elementi identični, stanje 1 i stanje 2 mogu se objediniti u jedno stanje, intenziteti otkaza i popravke su isti tako da se dobija pojednostavljen grafički prikaz. Isti grafički prikaz može se iskoristiti za određivanje pouzdanosti, kako popravljivog sistema sa paralelnom vezom dva elementa tako i popravljivog sistema sa jednim aktivnim elementom i jednim elementom u pripravnosti, označavajući sa λ' = λ intenzitet otkaza sistema sa jednim aktivnim elementom i jednim elementom u pripravnosti, a sa λ' = 2λ intenzitet otkaza sistema sa paralelnom vezom dva elementa. Ukoliko se želi uzeti u obzir i mogućnost da više od jedne osobe vrši popravku u isto vreme, smanjuje se srednje vreme popravke 1/μ, odnosno, povećava se intenzitet popravke μ, tako da kod sistema kada k osoba vrši popravku intenzitet popravke se obeležava sa μ' = kμ, gde je μ intenzitet popravke sistema kod koga samo jedna osoba vrši popravku. Vodeći računa o svemu prethodno rečenom dobija se univerzalni grafički prikaz predstavljen na slici 10.7.

Proračun pouzdanosti pomoću Markovljevih modela
158
Slika 10.7 Grafički prikaz modela Markova za pouzdanost sistema sa paralelnom vezom dva
elementa ili sa jednim aktivnim elementom i jednim elementom u pripravnosti
λ' = 2λ za slučaj paralelne veze dva elementa
λ' = λ za slučaj jednog aktivnog elementa i jednog elementa u pripravnosti
μ' = μ kada jedna osoba vrši popravku
μ' = kμ kada k osoba vrši popravku (k>1)
Na osnovu grafičkog prikaza dobijaju se sledeće jednačine:
( ) ( ) ( ) ( )ttPtPtttP 100 ''1 Δ+Δ−=Δ+ μλ (10.149)
( ) ( ) ( )[ ] ( )tPtttPttP 101 '1' Δ+−+Δ=Δ+ μλλ (10.150)
( ) ( ) ( )tPttPttP 212 1+Δ=Δ+ λ (10.151)
tj. za Δt → 0:
dttdP )(0 ( ) ( ) 0'' 10 =−+ tPtP μλ (10.152)
dttdP )(1 ( ) ( ) ( ) 0'' 01 =−++ tPtP λμλ (10.153)
dttdP )(2 ( ) 01 =− tPλ (10.154)
Primenom Laplasovih transformacija i odgovarajuće diferencijalne teoreme uz početne uslove P0(0) = 1, P1(0) = P2(0) = 0 dobija se sistem:
Proračun pouzdanosti pomoću Markovljevih modela
159
( ) ( )[ ] ( )[ ] 1'' 10 =−+ tPLtPLS μλ (10.155)
( )[ ] ( ) ( )[ ] 0'' 10 =+++− tPLStPL μλλ (10.156)
( )[ ] ( )[ ] 021 =+− tPSLtPLλ (10.157)
Rešavanjem ovog sistema jednačina, npr. sada Kramerovim pravilima, označavajući sa ΔS determinantu sistema, a sa Δ0, Δ1, Δ2 determinante kod kojih su respektivno prva, druga, odnosno treća kolona determinante sistema zamenjene kolonom slobodnih koeficijenata, dobija se:
SS
Ss
'00''0''
λμλλ
λλ
−++−
−+=Δ ;
SS
λμλ
μ
−++
−=Δ
00'00'1
0 ;
S
S
0000'01'
1 λλ
−+
=Δ ; 000''1''
2
λμλλ
μλ
−++−
−+=Δ S
S; (10.158)
( )[ ] =tPL 0 SΔ
Δ 0 = ( ) '''
'2 λλμλλ
μλ++++
++SS
S (10.159)
( )[ ] =tPL 1 SΔ
Δ1 =( ) '''
'2 λλμλλ
μ++++ SS
(10.160)
( )[ ] =tPL 2 SΔ
Δ 2 =[ ( ) ]'''
'2 λλμλλ
λλ++++ SSS
(10.161)
Ako se sa r1,2 obeleže rešenja kvadratne jednačine u imeniocu, a zatim rešenja u formi Laplasovih transformacija rastave na koeficijente dobija se:
=2,1r ( ) ( )
2'4'''' 2 λλμλλμλλ −++±++−
(10.162)
( )[ ] =tPL 0 ( )( )21
'rSrS
S−−
++ μλ = 1
21
1'
rSrr
r
−−
++ μλ
+ 2
12
2'
rSrr
r
−−
++ μλ
(10.163)
( )[ ] =tPL 1 ( )( )21
'rSrS −−
λ = 1
21
'
rSrr
−−λ
+ 2
12
'
rSrr
−−λ
(10.164)

Proračun pouzdanosti pomoću Markovljevih modela
160
( )[ ] =tPL 2 ( )( )21
'rSrSS −−
λλ = Srr 21
'λλ
+ ( )
1
211
'
rSrrr
−−
λλ
+ ( )
2
122
'
rSrrr
−−
λλ
(10.165)
Na kraju, dobija se konačno rešenje za verovatnoće P0(t), P1(t), P2(t) primenom inverznih Laplasovih transformacija i osobine izražavanja proizvoda rešenja kvadratne jednačine preko njenih koeficijenata, tj. Vijetovog pravila r1r2 = λλ'.
( ) =tP0 21
1'rr
r−
++ μλ tre 1 – 21
2'rr
r−
++ μλ tre 2 (10.166)
( ) =tP1 21
'rr −
λ tre 1 – 21
'rr −
λ tre 2 (10.167)
( ) =tP2 1 + 21
2
rrr−
tre 1 + 21
1
rrr−
tre 2 (10.168)
U zavisnosti od konfiguracije elemenata u sistemu dobijaju se različite vrednosti za pouzdanost. U slučaju sistema sa paralelnom vezom dva elementa ili sa jednim aktivnim elementom i jednim elementom u pripravnosti, pouzdanost je:
( ) ( ) ( ) =+= tPtPtR 10 21
1''rr
r−
+++ μλλ tre 1 – 21
2''rr
r−
+++ μλλ tre 2 (10.169)
Kod sistema sa rednom vezom dva elementa, pouzdanost se dobija iz jednačine R(t) = P0(t), uzimajući u obzir da je μ' = 0 (popravka kod redne veze elemenata u sistemu nema efekta na samu pouzdanost) i Vijetova pravila za vrednosti zbira i proizvoda rešenja odgovarajuće kvadratne jednačine u imeniocu tj. r1 + r2 = – (λ+λ'+μ') i r1r2 = λλ'. U tom slučaju izraz za pouzdanost je:
( ) ( ) tetPtR λ20
−== (10.170)
Potpuno analogno, izvodi se grafički prikaz modela Markova za raspoloživost sistema dva paralelno vezana elementa ili jednog aktivnog elementa i jednog elementa u pripravnosti. Taj prikaz dat je na slici 10.8. Praktično, jedina razlika je u mogućnosti održavanja, odnosno popravke u bilo kom stanju sistema.

Proračun pouzdanosti pomoću Markovljevih modela
161
Slika 10.8 Grafički prikaz modela Markova za raspoloživost sistema sa paralelnom vezom dva
elementa ili sa jednim aktivnim elementom i elementom u pripravnosti
λ' = 2λ za slučaj paralelne veze dva elementa
λ' = λ za slučaj jednog aktivnog elementa i jednog elementa u pripravnosti
μ' = μ'' = μ kada jedna osoba vrši popravku
μ' = μ'' = kμ kada k osoba vrši popravku (k>1)
Na isti način kao ranije, iz grafičkog prikaza slede sledeće jednačine:
( ) ( ) ( ) ( )ttPtPtttP 100 ''1 Δ+Δ−=Δ+ μλ (10.171)
( ) ( ) ( )[ ] ( ) ( )ttPtPtttPttP 2101 '''1' Δ+Δ+−+Δ=Δ+ μμλλ (10.172)
( ) ( ) ( ) ( )tPtttPttP 212 ''1 Δ−+Δ=Δ+ μλ (10.173)
odnosno, za graničnu vrednost Δt → 0:
dttdP )(0 ( ) ( ) 0'' 10 =−+ tPtP μλ (10.174)
dttdP )(1 ( ) ( ) ( ) ( ) 0'''' 201 =−−++ tPtPtP μλμλ (10.175)
dttdP )(2 ( ) ( ) 0'' 12 =−+ tPtP λμ (10.176)
Primenom početnih uslova P0(0) = 1, P1(0) = P2(0) = 0, Laplasovih transformacija i diferencijalne teoreme dobija se:
( ) ( )[ ] ( )[ ] 1'' 10 =−+ tPLtPLS μλ (10.177)

Proračun pouzdanosti pomoću Markovljevih modela
162
( )[ ] ( ) ( )[ ] ( )[ ] 0'''' 210 =−+++− tPLtPLStPL μμλλ (10.178)
( )[ ] ( ) ( )[ ] 0''' 21 =++− tPLStPL μλ (10.179)
Korišćenjem Kramerovih pravila, obeležavajući sa ΔS determinantu sistema, a sa Δ0, Δ1, Δ2 determinante kod kojih su redom prva, druga i treća kolona determinante sistema zamenjene kolonom slobodnih koeficijenata dobijaju se odgovarajuća rešenja u formi Laplasovih transformacija.
=ΔS
''0''''
0''
μλμμλλ
μλ
+−++−
−+
SS
S; =Δ0
''0'''0
0'1
μλμμλ
μ
+−−++
−
SS ;
=Δ1
''00''0'
01'
μμλ
λ
+−−
+
S
S; =Δ2
000''1''
λμλλ
μλ
−++−
−+S
S
(10.180a)
( )[ ] =tPL 0
SΔΔ 0 = ( )
[ ( ) ]'''''''''''''''''
2
2
μμμλλλμμλλμμμμλ
+++++++++++
SSSSS (10.180)
( )[ ] =tPL 1
SΔΔ1 = ( )
[ ( ) ]''''''''''''''
2 μμμλλλμμλλμλ
++++++++SSS
S (10.181)
( )[ ] =tPL 2
SΔΔ 2 = [ ( ) ]'''''''''''
'2 μμμλλλμμλλ
λλ+++++++ SSS
(10.182)
Ukoliko se, kao i pre, sa r3,4 označe rešenja kvadratne jednačine u imeniocu, a potom se rešenja u formi Laplasovih transformacija rastave na odgovarajuće koeficijente, dobija se:
=4,3r ( ) ( ) ( )
2''''''4'''''''' 2 μμλμλλμμλλμμλλ ++−+++±+++−
(10.183)
( )[ ] =tPL 0( )
( )( )43
2 ''''''rSrSS
SS−−
++++ μμμμλ =
=Srr 43
''' μμ
+
( )( )
3
433
32
3 ''''''
rSrrr
rr
−−
++++ μμμμλ
+
( )( )
4
344
42
4 ''''''
rSrrr
rr
−−
++++ μμμμλ
(10.184)
Proračun pouzdanosti pomoću Markovljevih modela
163
( )[ ] =tPL 1( )
( )( )43
'''rSrSS
S−−
+ μλ =Srr 43
''' μλ
+
( )( )
3
433
3 '''
rSrrr
r
−−+ μλ
+
( )( )
4
344
4 '''
rSrrr
r
−−+ μλ
(10.185)
( )[ ] ( )( )( ) ( )
4
344
3
43343
43
2
''''
rSrrr
rSrrr
Srr
rSrSStPL
−−
+−−
+=−−
=
λλλλλλλλ (10.186)
Laplasova transformacija funkcije raspoloživosti za sistem sa dva elementa u paralelnoj vezi ili sa jednim aktivnim elementom i jednim elementom u pripravnosti data je izrazom:
( )[ ] ( )[ ] ( )[ ]tPLtPLtAL 10 += (10.187)
Imajući u vidu identitete:
( )''''43 μμλλ +++−=+ rr (10.188)
i:
'''''''43 μμμλλλ ++=rr (10.189)
daljim sređivanjem dobija se da je:
( )[ ] ( ) ( )4
344
3
43343
'''1
rSrrr
rSrrr
Srr
tAL−−
−−−
−
−
=
λλλλλλ
(10.190)
Primenom Laplasovih transformacija dobija se inverzna transformacija prethodne jednačine:
( ) ⎟⎟⎠
⎞⎜⎜⎝
⎛−
−−⎟⎟
⎠
⎞⎜⎜⎝
⎛−=
434343
43''1r
er
errrr
tAtrtrλλλλ (10.191)
Ako su μ' i μ'' puno veći od λ i λ' (što je u praksi najčešće slučaj), onda će rešenja kvadratne jednačine r3,4 približno biti:
( ) ( )2
'''4'''''' 2
4,3μλμμμμ −+±+−
≈r (10.192)
Prvi član u jednačini 10.191 predstavlja raspoloživost u stanju ravnoteže A:

Proračun pouzdanosti pomoću Markovljevih modela
164
''''''''1'1
43 μμμλλλλλλλ
++−=−=
rrA (10.193)
Pošto λ i λ' imaju približno istu vrednost i mnogo su manji od μ' i μ'', prethodna jednačina može se svesti na oblik:
''''1
μμλλ
−≈A (10.194)
10.5.4. Proračun pouzdanosti i raspoloživosti sistema kada intenziteti otkaza i popravke nisu konstantni
Pretpostavka o konstantnom intenzitetu otkaza je ispravna za veliki broj praktičnih situacija, ali ni u kom slučaju za sve. U slučaju popravke je pretpostavka o konstantnom intenzitetu pod opravdanom sumnjom. To bi podrazumevalo da je verovatnoća izvršenja popravke u intervalu vremena (t, t + Δt) ista kao i u intervalu (10t, 10t + Δt) tj. da je u oba slučaja μΔt. Na osnovu toga se izvodi zaključak da čovek koji vrši popravku ništa ne saznaje o uzroku otkaza u toku svoga rada. Pošto to često nije slučaj, pretpostavka o konstantnom intenzitetu popravke nije uvek opravdana, već treba utvrditi odgovarajuću raspodelu koja uzima u obzir rastući intenzitet popravke.
Za situaciju kada intenzitet otkaza i intenzitet popravke nisu konstantni model Markova se mora modifikovati uvođenjem tzv. prividnih stanja. Na slici 10.9 prikazan je model Markova za raspoloživost sistema sa jednim elementom u slučaju konstantnog intenziteta otkaza i rastućeg intenziteta popravke.
Slika 10.9 Grafički prikaz modela Markova za raspoloživost popravljivog sistema sa jednim
elementom u slučaju konstantnog intenziteta otkaza i rastućeg intenziteta popravke
Vreme prelaska iz stanja 1 u stanje 0 je t10 i ono je jednako zbiru vremena t12 i t20. Prema tome, t10 je zbir dve slučajne promenljive veličine koje pripadaju eksponencijalnoj raspodeli. Ako se pretpostavi da je μ1 = μ2 = μ0, vreme t10 = t0 će pripadati gama raspodeli čija funkcija gustine verovatnoće ima oblik:

Proračun pouzdanosti pomoću Markovljevih modela
165
( ) ttetf 0200
μμ −= (10.195)
Može se dobiti da odgovarajuća funkcija intenziteta popravke ima sledeći oblik:
( )t
tt
0
20
1 μμ
μ+
= (10.196)
Izgled ove funkcije dat je na slici 10.10:
Slika 10.10 Funkcija intenziteta popravke data jednačinom 10.196
Na osnovu grafičkog prikaza, uzimajući u obzir μ1 = μ2 = μ0, dobijaju se sledeće jednačine:
( ) ( ) ( ) ( )ttPtPtttP 2000 1 Δ+Δ−=Δ+ μλ (10.197)
( ) ( ) ( ) ( )tPtttPttP 1001 1 Δ−+Δ=Δ+ μλ (10.198)
( ) ( ) ( ) ( )ttPtPtttP 10202 1 Δ+Δ−=Δ+ μμ (10.199)
tj. za Δt → 0:
dttdP )(0 ( ) ( ) 0200 =−+ tPtP μλ (10.200)
dttdP )(1 ( ) ( ) 0010 =−+ tPtP λμ (10.201)

Proračun pouzdanosti pomoću Markovljevih modela
166
dttdP )(2 ( ) ( ) 01020 =−+ tPtP μμ (10.202)
Primenom Laplasovih transformacija, uz diferencijalnu teoremu i početne uslove P0(0) = 1, P1(0) = P2(0) = 0 dobija se:
( ) ( )[ ] ( )[ ] 1200 =−+ tPLtPLS μλ (10.203)
( )[ ] ( ) ( )[ ] 0100 =++− tPLStPL μλ (10.204)
( )[ ] ( ) ( )[ ] 02010 =++− tPLStPL μμ (10.205)
Pomoću Kramerovih pravila za rešavanje sistema jednačina, označavajući sa ΔS determinantu sistema, a sa Δ0, Δ1, Δ2 determinante kod kojih su respektivno prva, druga i treća kolona determinante sistema zamenjene kolonom slobodnih koeficijenata, dolazi se do rešenja za potrebne verovatnoće u formi Laplasovih transformacija:
=Δs
00
0
0
00
0
μμμλ
μλ
+−+−
−+
SS
S; =Δ 0
00
0
0
000
01
μμμ
μ
+−+
−
SS ;
=Δ1
0
0
0000
1
μλ
μλ
+−
−+
S
S; =Δ 2
00010
0
0
μμλ
λ
−+−
+S
S (10.206)
( )[ ] =tPL 0
SΔΔ 0 =
( )[ ( ) ( )]λμμλμ
μ
02
002
20
22 ++++
+
SSSS
(10.207)
( )[ ] =tPL 1
SΔΔ1 =
( )[ ( ) ( )]λμμλμ
μλ
02
002
0
22 ++++
+
SSSS
(10.208)
( )[ ] =tPL 2 SΔ
Δ 2 = [ ( ) ( )]λμμλμλμ
02
002
0
22 ++++ SSS (10.209)
Očigledno da raspoloživost sistema sa jednim elementom iznosi A(t) = P0(t), pa su samim tim jednake i odgovarajuće Laplasove transformacije L[A(t)] = L[P0(t)].
( )[ ] ( )[ ] == tPLtAL 0 ( )
[ ( ) ( )]λμμλμμ
02
002
20
22 ++++
+
SSSS
(10.210)

Proračun pouzdanosti pomoću Markovljevih modela
167
U jednom od prethodnih poglavlja određena je raspoloživost sistema sa jednim elementom za slučaj konstantnog intenziteta otkaza (λ = const.) i intenziteta opravke (μ = const.) i ona iznosi:
A(t) = P0(t) = ( ) ( ) == tPtA 0 μλ
μ+
+ ( )te μλ
μλλ +−
+ (10.211)
Odgovarajuća raspoloživost u stanju ravnoteže (za t → ∞) u tom slučaju je:
( ) ==∞→
tAAtlim
μλμ+
(10.212)
Može se sada izvršiti poređenje raspoloživosti sistema sa jednim elementom u slučaju konstantnog intenziteta otkaza (λ = const.) i intenziteta popravke (μ = const.) i sistema sa jednim elementom za slučaj konstantnog intenziteta otkaza (λ = const.) i rastućeg intenziteta popravke (μ(t)). Da bi poređenje uopšte bilo moguće, moraju se izjednačiti srednje vrednosti odgovarajućih raspodela i to srednju vrednost eksponencijalne raspodele 1/μ i srednju vrednost gama raspodele f(t0) = t-2
00te μμ koja iznosi 2/μ0. Uz jednakost μ0 = 2μ, dobija se sledeća forma za Laplasovu
transformaciju raspoloživosti sistema sa jednim elementom za slučaj konstantnog intenziteta otkaza i rastućeg intenziteta popravke:
( )[ ] ( )[ ] == tPLtAL 0 ( )[ ( ) ( )]μλ+μ+λ+μ+
μ+444
222
2
SSSS (10.213)
Međutim, ne moraju se primenjivati inverzne Laplasove transformacije za dobijanje A(t), već se može direktno, što je jednostavnije, korišćenjem teoreme krajnjih vrednosti iz teorije Laplasovih transformacija, doći do raspoloživosti u stanju ravnoteže. Naime, granična vrednost u vremenskom domenu,
∞→tlim A(t) , odgovara graničnoj vrednosti ( )[ ]tASL
0Slim
→ u domenu Laplasovih
transformacija. Dakle, raspoloživost u stanju ravnoteže sistema sa jednim elementom za slučaj konstantnog intenziteta otkaza i rastućeg intenziteta popravke je:
A = ∞→t
lim ( )tA = ( )[ ]tASL0S
lim→
= 0S
lim→
( )[ ( ) ( )]μλ+μ+λ+μ+
μ+444
222
2
SSSS =
μλμ+
(10.214)
Očigledno, poredeći odgovarajuće raspoloživosti u stanju ravnoteže, zaključuje se da se ne razlikuju, odnosno da vremenska zavisnost intenziteta popravke nema na ovu veličinu nikakav uticaj.

Proračun pouzdanosti pomoću Markovljevih modela
168
10.6. Teorija obnavljanja
Kao što je već rečeno, kod popravljivih sistema uvodi se funkcija raspoloživosti koja, u stvari, predstavlja verovatnoću da će sistem raditi u trenutku vremena t, pod uslovom da je bio operativan u vremenu t = 0, Međutim, funkcija raspoloživosti ne sadrži podatke o broju ciklusa otkaz – popravka do određenog vremenskog trenutka t, što je vrlo bitno sa stanovišta planiranja snabdevanja rezervnim delovima i rasporeda rada ljudi koji vrše održavanje, odnosno popravku. Pored ovoga, kod ovakvih sistema značajni su i razni drugi podaci koji omogućavaju izračunavanje različitih verovatnoća bitnih u pogledu funkcionisanja samog sistema. Na primer, za izračunavanje verovatnoće dugih perioda vremena u kojima sistem nije operativan, potrebni su podaci o veličini operativnog vremena i vremena zastoja.
Rešavanje svih ovakvih problema omogućava teorija obnavljanja, koja proučava stohastičke procese gde se događaji odvijaju po određenoj statističkoj raspodeli i to tako da uvek kada se odigra događaj, proces ponovo započinje, čime se odigralo obnavljanje.
Posmatra se, u dugom vremenskom periodu, sistem od jednog elementa. Ukoliko dođe do otkaza elementa, pretpostavljeno je da se taj element praktično trenutno zamenjuje ispravnim, odnosno da je raspoloživost sistema približno jedan. Neka se prvi otkaz dogodi u trenutku vremena t1, kada se element zamenjuje drugim i ispravnim koji, recimo, otkazuje u trenutku vremena t2’ što znači da je radio t2 = t2’ – t1 časova do otkaza, kada se zamenjuje trećim ispravnim elementom itd. Saglasno tome, operativno vreme sistema τn, tj. vreme do pojave n-tog otkaza do kada postoji n-1 zamena, odnosno obnavljanje je:
τn = t1 + t2 + … + tn (10.215)
Neka su t1, t2,…,tn slučajne veličine. Funkcija gustine verovatnoće sume slučajnih veličina, odnosno funkcija gustine operativnog vremena za n obnavljanja, jednaka je višestrukom integralu konvolucije pojedinačnih funkcija gustine f(t1), f(t2),…,f(tn). Iz teorije Laplasovih transformacija, na osnovu teoreme konvolucija, konvolucija u vremenskom domenu jednaka je proizvodu u domenu Laplasovih transformacija.
L[f(τn)] = L[f(t1)]L[f(t2)]…L[f(tn)] (10.216)
U slučaju da su svi elementi isti dobija se:
L[f(τn)] = {L[f(t)]}n (10.217)
Za konstantan intenzitet otkaza (λ = const.), funkcija gustine vremena otkaza ima formu
eksponencijalne raspodele f(t) = λe-λt čija je Laplasova transformacija L[f(t)] = λ+
λS
, tako da
data jednačina sada ima sledeći oblik:
L[f(τn)] = n
S⎟⎠⎞
⎜⎝⎛
λ+λ (10.218)

Proračun pouzdanosti pomoću Markovljevih modela
169
Na osnovu prethodne jednačine i inverznih Laplasovih transformacija dobijaju se funkcije gustine operativnih vremena za jedno, dva, odnosno u opštem slučaju n obnavljanja:
f(τ1) = λe-λt
f(τ2) = λ2te-λt: (10.219)
f(τn) = ( )( )!1
1
−λλ λ−−
net tn
Ova funkcija gustine zove se specijalna Erlangova raspodela n-tog reda. Znači, Poasonov proces je proces kod koga proces obnavljanja bez otkaza odgovara eksponencijalnoj raspodeli, a operativno vreme Erlangovoj raspodeli.
Koristeći prethodne jednačine, može se izračunati, npr. verovatnoća da se n-to obnavljanje odigralo pre određenog vremena t, što je vrlo bitno sa stanovišta planiranja snabdevanja rezervnim delovima. Recimo, očekivana vrednost za τ1 predstavlja srednje vreme odigravanja prvog obnavljanja i iznosi:
E(τ1) = ( )∫∞
τ0
1 dttf = ∫∞
λ−λ0
dtte t = λ1 (10.220)
Verovatnoća da se prvo obnavljanje odigralo pre vremena t = 1/λ iznosi:
P(λ
≤τ1
1 ) = ∫λ
λ−λ/1
0
dtte t = 1 – 1−e = 0.632 (10.221)
Na sličan način, srednje vreme odigravanja drugog obnavljanja je očekivana vrednost za τ2:
E(τ2) = ( )∫∞
τ0
2 dttf = ∫∞
λ−λ0
22 dtet t = λ2 (10.222)
Verovatnoća odigravanja dva obnavljanja do vremenskog trenutka t = 2/λ je:
P(λ
≤τ2
2 ) = ∫λ
λ−λ/2
0
22 dtet t = 1 – 23 −e = 0.594 (10.223)
Od interesa može biti podatak o verovatnoći da se tačno određeni broj obnavljanja odigra u intervalu od 0 do t. Označimo sa N(t) broj obnavljanja u t sati rada. Očigledno je da važi:

Proračun pouzdanosti pomoću Markovljevih modela
170
P[N(t) < n] = P(τ n > t) = 1 – P(τ n ≤ t) = 1 – F(τ n) = 1 – ( )∫ τt
n dtf0
(10.224)
S obzirom da je n diskretna slučajna promenljiva veličina, sledi:
P[N(t)=n] = P[N(t) < n+1] – P[N(t) < n] = F(τ n) – F(τ n+1) = ( )∫ τt
n dtf0
–
( )∫ +τt
n dtf0
1
(10.225)
Za Poasonov proces nakon zamene odgovarajućih funkcija gustine dobija se:
P[N(t)=n] = F(τ n) – F(τ n+1) = ( )( )∫ −λλ λ−−t tn
dtn
et
0
1
!1 – ( )
∫λ−λλt tn
dtn
et
0 ! (10.226)
Zamenom datog rešenja integrala u prethodnu jednačinu dobija se Poasonova raspodela što je i očekivano za broj obnavljanja.
F(τ n) = ( )( )∫ −λλ λ−−t tn
dtn
et
0
1
!1 = 1 – ( )∑
−
=
λ− λ1
0 !
n
m
mt
mte (10.227)
P[N(t) = n] = ( )∑=
λ− λn
m
mt
mte
0 !– ( )∑
−
=
λ− λ1
0 !
n
m
mt
mte = ( )
!net tn λ−λ (10.228)
Srednji broj obnavljanja predstavlja očekivanu vrednost broja obnavljanja i data je formulom:
E[N(t)] = ( )[ ]∑∞
=
=0n
ntNnP = ( ) ( )[ ] ( )∑∑∞
=
∞
=+ τ=τ−τ
001
nn
nnn FFFn (10.229)
S obzirom da se smatra da su svi elementi identični i samim tim sve funkcije gustine jednake, pokazano je ranije da važi:
L[f(τn)] = {L[f(t)]}n (10.230)
Pomoću ovog izraza i na osnovu integralne teoreme iz teorije Laplasove transformacije,
koja integral ( )∫t
dttf0
u vremenskom domenu prevodi u oblik ( )[ ]tfLS1 u domenu Laplasove
transformacije, dobija se:

Proračun pouzdanosti pomoću Markovljevih modela
171
L[F(τ n)] = L[ ( )∫∞
τ0
dtf n ] = S1 L[f(τn)] =
S1 {L[f(t)]}n (10.231)
Primenom Laplasove transformacije na jednačinu, E[N(t)] = ( )∑∞
=
τ1n
nF , iz koje se dobija
srednji broj obnavljanja, sledi:
L{E[N(t)]} = ( )[ ] ( )[ ]{ } ( )[ ] ( )[ ]{ }...11 2
11++==τ ∑∑
∞
=
∞
=
tfLtfLS
tFLS
FLn
n
nn (10.232)
Beskonačna geometrijska progresija iz prethodnog izraza izračunava se po formuli:
L[f(t)] + L[f(t)]2 + … = ( )[ ]( )[ ]tfL
tfL−1
, tako da se dolazi do oblika:
L{E[N(t)]} = ( )[ ]( )[ ]{ }tfLS
tfL−1
(10.233)
Za Poasonov proces, kada je intenzitet otkaza konstantan (λ = const.), funkcija gustine
vremena otkaza je f(t) = λe-λt, a Laplasova transformacija L[f(t)] = λ+
λS
. U tom slučaju je:
L{E[N(t)]} = 2Sλ (10.234)
odakle se inverznom Laplasovom transformacijom dobija srednji broj obnavljanja koji je linearna funkcija vremena:
E[N(t)] = λt (10.235)
Intenzitet otkaza, odnosno prosečan intenzitet obnavljanja je:
λpr = ( )[ ]dt
tNdE = λ = const. (10.236)
Pored ovoga, postoji mogućnost razmatranja popravke kao procesa kod koga postoji naizmenično ponavljanje otkaza i popravke tj. po redosledu prvi otkaz, prva popravka, drugi otkaz, druga popravka itd., odnosno gde postoji naizmenični proces obnavljanja.
Ukoliko sa t1, t2, … , tn označimo operativna vremena, a sa T1, T2, … , Tn vremena popravke, kao i u prethodnom izlaganju sledi:
τ = t1+T1+t2+T2+ … +tn+Tn = (t1+t2+…+tn) + (T1+T2+ … +Tn) (10.237)

Proračun pouzdanosti pomoću Markovljevih modela
172
Uvodeći dve nove slučajne promenljive: operativno vreme sistema O = t1+t2+ … +tn i vreme zastoja sistema
Z = T1+T2+ … +Tn dobija se da je:
τn = On + Zn (10.238)
Analogno kao i ranije, funkcija gustine verovatnoće sume slučajnih veličina jednaka je višestrukom integralu konvolucije pojedinačnih funkcija gustine i to funkcija gustine otkaza f(t1), f(t2), … , f(tn) i funkcija gustine popravki f(T1), f(T2), … , f(Tn). S obzirom da je, na osnovu teoreme konvolucija iz teorije Laplasovih transformacija, konvolucija u vremenskom domenu jednaka proizvodu u domenu Laplasovih transformacija, dobijaju se sledeći izrazi:
L[f(τn)] = L[f(t1)]L[f(T1)]L[f(t2)]L[f(T2)]…L[f(tn)]L[f(Tn)] (10.239)
L[f(On)] = L[f(t1)]L[f(t2)]…L[f(tn)] (10.240)
L[f(Zn)] = L[f(T1)]L[f(T2)]…L[f(Tn)] (10.241)
Nalaženjem inverznih Laplasovih transformacija može se dobiti vreme do n-tog obnavljanja sistema (podrazumevajući n-ti ciklus popravke), raspodela operativnog sistema ili raspodela vremena zastoja sistema.
Za eksponencijalnu raspodelu funkcije gustine otkaza (λe-λt) i funkcije gustine popravke (μe-μt) odgovarajuće Laplasove transformacije imaju sledeći oblik:
( )[ ]λ+
λ=
StfL 1 ; ( )[ ]
μ+μ
=τS
fL 1 , (10.242)
odnosno važi:
( )[ ] ( )[ ] ( )[ ] ( )( )μ+λ+λμ
==SS
TfLtfLtfL 11 (10.243)
Za ovaj slučaj očekivani broj popravki se može dobiti koristeći jednačinu iz ranijeg izlaganja:
L{E[N(t)]}= ( )[ ]( )[ ]{ }
( )( )
( )( )( ) 22
11 SSS
SSS
SStfLS
tfL μλλμ
μλλμ
μλλμ
μλλμ
+=
++=
⎭⎬⎫
⎩⎨⎧
++−
++=
−–
- ( ) ( )μλ
μλλμ
μλλμ
+++=+
SS
22
(10.244)

Proračun pouzdanosti pomoću Markovljevih modela
173
Primenom inverznih Laplasovih transformacija ( teS
tSS
λ−→λ+
→→1;1;11
2 ) dobija se
konačni izraz za očekivani broj popravki:
( )[ ]( )
( )[ ]tettNE μ+λ−−μ+λ
λμ−
μ+λλμ
= 12 (10.245)
Očekivani broj otkaza E[N(t)] je:
L{E[N(t)]}= ( )[ ]{ }( )[ ]
( ) ( )( ) 22
2
1 SSSS
S
SSTfL
tNEL μ+λλμ
=μ+λ+
μ+λ=
μ+μ
μ+λ+λμ
= +
+ ( ) ( )μ+λ+
μ+λλ
−μ+λ
λ
SS
2
2
2
2
(10.246)
odnosno traženjem inverznih Laplasovih transformacija:
( )[ ]( )
( )[ ]tettNE μ+λ−−μ+λ
λ−
μ+λλμ
= 12
2
(10.247)
Na osnovu sledećih jednačina može se uspostaviti veza između raspoloživosti sistema, operativnog vremena i vremena zastoja, odnosno raspoloživosti sistema u stanju ravnoteže dobija se iz izraza:
( ) ( )( ) ( )tZtO
tOAt +
=∞∞→
lim (10.248)
ili
( )( )[ ]
( ) ( )[ ]tZtOE
tOEA
t
t
+=∞
∞→
∞→
lim
lim=
( )[ ]( ) ( )[ ]{ } zo
o
t
t
nmnmnm
tZtOE
tOE
+=
+∞→
∞→
lim
lim, (10.249)
pri čemu je:
mo – srednje operativno vreme
mz – srednje vreme zastoja

Proračun pouzdanosti pomoću Markovljevih modela
174
Za slučaj kada operativno vreme i vreme zastoja imaju eksponencijalnu raspodelu, odnosno respektivno imaju sledeće oblike λe-λt i μe-μt, srednje operativno vreme iznosi 1/λ, srednje vreme zastoja je 1/μ, dok prethodna jednačina u tom slučaju postaje:
( )μ+λ
μ=
μ+
λ
λ=+
=∞nn
n
nmnmnm
Azo
o (10.250)
što i jeste vrednost u jednom od prethodnih poglavlja dobijene raspoloživosti u stanju ravnoteže sistema sa jednim elementom.

Alokacija pouzdanosti
175
11. ALOKACIJA POUZDANOSTI
11.1. Pojam alokacije pouzdanosti
Pouzdanost nekog dela sistema zavisi od funkcije koju taj deo treba da obavi, složenosti dela, načina na koji se izražava namenjena funkcija i značaja tog dela u okviru sistema. Proces u kom se raspoređuju (alociraju) zahtevi pouzdanosti pojedinim delovima sistema, naziva se alokacija pouzdanosti. Alokacija pouzdanosti je, prema tome, proces definisanja ciljeva ili zahteva pouzdanosti za pojedine delove sistema na takav način da se obezbedi zadovoljenje postavljenog zahteva za pouzdanost sistema. Idealno alociranje pouzdanosti je ono kod kojeg se postiže najekonomičnije korišćenje različitih mogućnosti, uključujući vreme i troškove.
Veoma bitna karakteristika, koja ima veliki uticaj na mogućnost postizanja zahtevane pouzdanosti, je složenost sistema. Dakle, što je sistem složeniji to se on sastoji iz većeg broja podsistema, pa je teže i skuplje postići zahtevanu pouzdanost.
Problem alokacije pouzdanosti kod nekog sistema svodi se na rešavanje sledeće nejednačine:
∗∗∗∗ ≥ RRRRf n ),...,,( 21 (11.1)
gde je:
R* - zahtevana pouzdanost sistema
Ri* - alocirana pouzdanost i-tog dela sistema.
Prethodna jednačina može se uopštiti, pa se u tom slučaju R* i Ri* posmatraju kao funkcije
vremena.
Pošto se većina modela alokacije pouzdanosti zasniva na pretpostavci da su otkazi delova sistema nezavisni i da otkaz jednog dela sistema znači otkaz čitavog sistema tada jednačina (11.1) prelazi u specijalni slučaj:
)()(...)()( 21 tRtRtRtR n∗∗∗∗ ≥⋅⋅⋅ (11.2)
Prethodna jednačina ima beskonačno mnogo rešenja, ako se ne postave nikakva ograničenja po pitanju alokacije pouzdanosti.
Sistem, u kom je dobro izvršena alokacija pouzdanosti, pokazuje sledeće prednosti:
• kvantitativne vrednosti u pogledu zahtevane pouzdanosti primoravaju proizvođača da razmatra pouzdanost ravnopravno sa ostalim parametrima sistema, kao što su performanse, masa, troškovi itd.
• kao posledica planiranja u pravcu postizanja zahtevane pouzdanosti, ostvariće se mnoga poboljšanja u konstrukciji, proizvodnji i metodama ispitivanja;

Alokacija pouzdanosti
176
• alokacija pouzdanosti usmerava pažnju na odnose između pouzdanosti delova, sklopova, podsistema i sistema, što doprinosi boljem razumevanju osnovnih problema pouzdanosti svojstvenih konstrukciji;
• alokacija pouzdanosti će u većini slučajeva rezultovati u optimalnoj pouzdanosti sistema, jer uzima u obzir faktore kao što su značajnost troškova, održavanje, masa i prostor.
Alokacija pouzdanosti predstavlja kontinualan proces. Zahteve za pouzdanost sistema, koji su bili postavljeni prilikom njegove konstrukcije, potrebno je stalno kritički razmatrati i vršiti eventualne izmene na osnovu značenja stečenih u fazi razvoja i eksploatacije.
11.2. Metode alokacije pouzdanosti
11.2.1. Metoda jednake alokacije
Suština ove metode je u tome da se svakom delu sistema alociraju određeni, jednaki zahtevi za pouzdanost, da bi se na taj način ispunio zahtev pouzdanosti za celokupni sistem. U ovom slučaju se pretpostavlja da se sistem sastoji od n redno vezanih podsistema. Prema tome, ova metoda se može modelovati sledećom jednačinom:
∏=
∗ =n
iiRR
1
* (11.3)
gde je:
R* - alocirana pouzdanost sistema
Ri* - alocirana pouzdanost i-tog dela sistema.
Dakle, da bi se ostvarila zahtevana pouzdanost sistema R*, kako su u ovom slučaju sve Ri*,
i = 1, 2, 3, ..., n međusobno jednake, potrebno je svakom podsistemu alocirati pouzdanost koja iznosi:
( )ni RR
1** = , za i = 1, 2, 3, ..., n (11.4)
Upravo ovo je i glavni nedostatak ove metode, jer se ne vodi računa o složenosti pojedinih podsistema, pa otud i teškoće sa kojima se možemo susretati prilikom realizacije zahtevane pouzdanosti na nekom konkretnom sistemu.
Alokacija pouzdanosti
177
11.2.2. AGREE metoda alokacije
Naziv ove metode potiče od skraćenice za Savetodavnu grupu za pouzdanost elektronske opreme (AGREE – Advisory Group on Reliability of Electronic Equipment), koja je i razvila ovu metodu 1957. godine. Treba pomenuti da ova metoda uzima u obzir i složenost i značaj svakog pojedinog dela jednog elektronskog sistema.
Kao pretpostavka u ovoj metodi uzima se činjenica da se otkazi svakog od n redno vezanih delova sistema raspoređuju prema eksponencijalnom zakonu (tj. intenzitet otkaza je konstantan).
Da bi se na osnovu ove metode izvršila alokacija pouzdanosti, mora se najpre utvrditi minimalno prihvatljivo srednje vreme između otkaza ( θi ) i-tog dela sistema.
Složenost sistema se definiše preko modula, gde se pod modulom podrazumeva elektronska cev, tranzistor, dok se dioda uzima kao polumodul.
Takođe, definiše se i faktor značajnosti određenog dela sistema kao verovatnoća otkaza sistema u slučaju otkaza tog dela sistema. Ako je faktor značajnosti nekog dela sistema jednak 1, onda to znači da taj deo sistema mora biti funkcionalan, da bi sistem mogao da obavlja svoj zadatak. Analogno prethodnom, ako neki deo sistema ima faktor značajnosti jednak 0, to onda znači da sistem obavlja svoj zadatak bez obzira na stanje u kom se nalazi taj deo sistema.
Minimalno prihvatljiva vrednost srednjeg vremena otkaza i-tog dela sistema data je sledećim obrascem:
[ ]*)(ln ti
iii RN
twN−⋅
⋅⋅=θ , za i = 1, 2, 3, ..., n (11.5)
gde je:
t – vreme rada sistema
ti – vreme rada i-tog dela sistema
Ni – broj elemenata u i-tom delu sistema
N - ukupan broj modula u sistemu
R*(t) – zahtevana pouzdanost sistema u vremenu t
θi – alocirana vrednost srednjeg vremena otkaza i-tog dela sistema
wi – faktor značajnosti i-tog dela sistema.
Vrednost pouzdanosti, na ovaj način alocirane i-tom delu sistema, za vreme ti iznosi:
iit
i eR θ−=* (11.6)
Treba napomenuti još, da ova metoda postiže najbolje rezultate u slučaju kada je faktor značajnosti wi , svakog dela sistema blizak 1. U suprotnom, ako je wi veoma malo, alokacija pouzdanosti izvršena ovom metodom je neadekvatna.

Alokacija pouzdanosti
178
Da bi se ilustrovala ova metoda, posmatramo najopštiju šemu telekomunikacionog sistema koji je dat na slici 11.1.
PREDAJNIK KANAL PRIJEMNIK
Slika 11.1 Blok šema telekomunikacionog sistema
U procesu alokacije pouzdanosti, koja se izvodi na prethodno prikazanom sistemu, zahtevana vrednost za pouzdanost, sa kojom on treba da izvršava zadatke u trajanju od 20 godina iznosi 0.90. Predajnik se sastoji od četiri podsistema, koji su predstavljeni blok šemom na slici 11.2. U predajniku se signal, koji se prenosi, najpre podvrgava statističkom, a zatim i zaštitnom kodovanju. Nakon odgovarajuće predajne obrade, signal se potom u linijskom koderu prilagođava liniji veze na koju izlazi. Takođe, u tabeli 11.1. dati su pretpostavljeni neophodni podaci, da bi se mogla sprovesti zahtevana alokacija pouzdanosti AGREE metodom.
STATISTICKIKODER
ZASTITNIKODER
PREDAJNAOBRADA
LINIJSKIKODER
Slika 11.2 Blok šema predajnika
Tabela 11.1 Podaci za podsisteme sa slike 11.2. NAZIV
PODSISTEMA ( i ) BROJ
MODULA (Ni ) FAKTOR
ZNAČAJNOSTI ( wi ) VREME
RADA ( ti )
1. Statist. koder 28 1 20 2. Zašt. koder 40 1 20
3. Pred. obrada 65 1 20 4. Linijski koder 32 1 20
Prema podacima iz tabele 11.1. izlazi da je ukupan broj modula u sistemu dat sledećom sumom:
165326540284
1
=+++== ∑=i
iNN
Potrebno je, potom, da se izračuna minimalno srednje vreme između otkaza za podsisteme 1, 2, 3 i 4 prema jednačini (11.5):
[ ] godina61,11189.0ln28
2011651 =
−⋅⋅⋅
=θ

Alokacija pouzdanosti
179
[ ] godina03,7839.0ln40
2011652 =
−⋅⋅⋅
=θ
[ ] godina86,4819.0ln65
2011653 =
−⋅⋅⋅
=θ
[ ] godina78,9789.0ln32
2011654 =
−⋅⋅⋅
=θ
Vrednosti pouzdanosti koje treba alocirati podsistemima 1, 2, 3 i 4 dobijaju se iz jednačine (11.6):
9823,0)20( 61,111820
*1 ==
−eR
9748,0)20( 03,78320
*2 ==
−eR
9593,0)20( 86,48120
*3 ==
−eR
9798,0)20( 78,97820
*4 ==
−eR
Ako se proveri vrednost pouzdanosti sistema dobiće se:
90002,09798,09593,09748.09823,0)20(* =⋅⋅⋅=R
što je upravo vrednost pouzdanosti koju je trebalo ostvariti.
11.2.3. ARINC metoda alokacije
Naziv ove metode potiče od skraćenice za Aeronautičku radio-korporaciju (ARINC – Aeronautical Radio, Inc.) koja je i razvila ovu metodu početkom 60-ih godina.
Pretpostavke za primenu ove metode su:
• sistem se sastoji od n redno vezanih delova, tako da otkaz bilo kog dela sistema predstavlja ujedno i otkaz celog sistema;
• intenziteti otkaza su konstantni
• vreme rada delova sistema jednako je vremenu rada celog sistema.
Ova metoda alokacije pouzdanosti traži da se zahtevi pouzdanosti izraze preko intenziteta otkaza. Dakle, potrebno je odabrati λi
* tako da bude ispunjeno:

Alokacija pouzdanosti
180
∑=
≤n
ii
1
** λλ , za i = 1, 2, ..., n (11.7)
gde je:
λi* - intenzitet otkaza alociran i-tom delu sistema
λ* - zahtevani intenzitet otkaza sistema.
Dakle, prvo je potrebno utvrditi intenzitet otkaza delova sistema (λi*) na osnovu
iskustvenih podataka. Potom se za svaki deo sistema utvrđuje težinski faktor ( ui ) prema sledećem obrascu:
∑=
= n
ii
iiu
1λ
λ, za i = 1, 2, ..., n (11.8)
Težinski faktor ( ui ) predstavlja relativnu osetljivost na otkaze i-tog dela sistema, pa važi:
∑=
=n
iiu
11 (11.9)
Potom se određuje zahtevani intenzitet otkaza i-tog dela sistema korišćenjem jednačine (11.10):
iii u λλ ⋅=* (11.10)
pri čemu se pretpostavlja da u relaciji (11.7) važi znak jednakosti.
Vrednosti intenziteta otkaza dobijeni iz relacije (11.10) su u stvari one vrednosti koje treba alocirati pojedinim delovima sistema da bi se ostvario zahtevani intenzitet otkaza celokupnog sistema, odnosno da bi se ostvarila zahtevana pouzdanost sistema.
Na sledećem primeru telekomunikacionog sistema ilustrovana je ARINC metoda alokacije pouzdanosti.
U prethodno pomenutom sistemu učestvuju uređaji sa slike 11.3. na kojoj su punom linijom ucrtani elementi u tranzitnoj, a isprekidanom u pristupnoj i učesničkoj ravni.
DT LC CK RRE
Slika 11.3 Blok šema telekomunikacionog sistema

Alokacija pouzdanosti
181
Digitalni telefon (DT) namenjen je za komunikaciju učesnika u sistemu, a lokalna centrala (LC) za komutaciju telefonskih kanala u pristupnoj ravni ili višekanalni prenos. Centar za komutaciju (CK) omogućuje integraciju komutacije i prenos govornih i negovornih signala na bazi komutacije kanala, a radiorelejni uređaji (RRE) prenose informacije u opsegu radiofrekvencija tranzitne ravni.
Podaci o pouzdanosti elementa sistema dobijeni su standardnim postupkom sumiranja intenziteta otkaza sastavnih delova i modela pouzdanosti uređaja postavljenog na osnovu funkcionalne pouzdanosti njegovih sklopova.
Podaci o intenzitetu otkaza pojedinih elemenata sistema, λi i vrednosti srednjeg vremena otkaza, mi (recipročnih sa λi) dati su u tabeli 11.2.
Za vreme rada prethodno prikazanog telekomunikacionog sistema od 20 godina zahteva se pouzdanost od 0,90. Potrebno je odrediti zahteve pouzdanosti za podsisteme odnosno izvršiti alokaciju pouzdanosti istim.
Tabela 11.2 Intenziteti otkaza, λi i srednje vreme otkaza, mi elemenata sistema UREĐAJ λi [1/god] mi [god]
1. Digitalni telefon 3,254 0,307 2. Lokalna centrala 26,479 0,038
3. Centar za komutaciju 38,252 0,026 4. Radiorelejni uređaj 4,446 0,225
Pošto je zahtevana pouzdanost sistema:
90,0)20(*20* == ⋅− λeR
odgovarajući intenzitet otkaza biće:
god110268,5
2090,0ln 3* −⋅=−=λ
Korišćenjem jednačine (11.8) dobiju se vrednosti težinskih faktora za podsisteme:
04493,0446.4252,38479.26254,3
254,3
4321
11 =
+++=
+++=
λλλλλu
36558,0446.4252,38479.26254,3
479,26
4321
22 =
+++=
+++=
λλλλλu
52812,0446.4252,38479.26254,3
252,38
4321
33 =
+++=
+++=
λλλλλ
u

Alokacija pouzdanosti
182
06138,0446.4252,38479.26254,3
446,4
4321
44 =
+++=
+++=
λλλλλu
Sada se primenom jednačine (11.10) mogu izračunati vrednosti intenziteta otkaza koje treba alocirati podsistemima:
godu 1102367,010268,504493,0 33*
1*1
−− ⋅=⋅⋅=⋅= λλ
godu 1109259,110268,536558,0 33*
2*2
−− ⋅=⋅⋅=⋅= λλ
godu 1107821,210268,552812,0 33*
3*3
−− ⋅=⋅⋅=⋅= λλ
godu 1103233,010268,506138,0 33*
4*4
−− ⋅=⋅⋅=⋅= λλ
Prema tome, odgovarajuće vrednosti pouzdanosti alocirane podsistemima biće:
9953,0)20(3102367,020*
1 ==−⋅⋅−eR
9622,0)20(3109259,120*
2 ==−⋅⋅−eR
9459,0)20(3107821,220*
3 ==−⋅⋅−eR
9936,0)20(3103233,020*
4 ==−⋅⋅−eR
11.2.4. Metoda alokacije uz minimalan uložen napor
Ova metoda se zasniva na minimalnom uloženom naporu za ostvarivanje zahtevane pouzdanosti sistema. U ovom slučaju se posmatra sistem koji se sastoji od n delova u rednoj konfiguraciji, pri čemu se u svakoj fazi razvoja sistema određuje ili vrši procena pouzdanosti sistema. Ovom metodom nastoji se da se poboljša pouzdanost delova sistema sa nižom pouzdanošću.
Neka su R1, R2, ..., Rn pouzdanosti delova sistema 1, 2, ..., n respektivno, onda je pouzdanost celokupnog sistema data sledećim obrascem:

Alokacija pouzdanosti
183
∏=
=n
iiRR
1
(11.11)
Neka se zahteva pouzdanost sistema R* takva da je R* > R. Znači, potrebno je povećati bar jednu od pouzdanosti Ri , da bi se zadovoljila zahtevana pouzdanost sistema R* . Da bi se postiglo ovo povećanje, potrebno je izvršiti određeni napor koji se raspoređuje na sve delove sistema.
Pretpostavka je, da je za svaki deo sistema vezana ista funkcija napora G(Ri, Ri*) koja
izražava količinu napora potrebnu za povećanje pouzdanosti i-tog dela sistema sa Ri na Ri*.
Da bi se definisale neke osobine funkcije napora predstavljeni su njeni argumenti opštim oznakama G(x, y) i navedena njena svojstva u nastavku:
• ova funkcija je uvek veća ili jednaka nuli, tj:
0,0),( >>≥ xyyxG (11.12)
• G(x, y) je neopadajuća funkcija od y za konstantnu vrednost x, i nerastuća funkcija od x za konstantnu vrednost y, tj:
0),,(),( >ΔΔ+≤ yyyxGyxG (11.13)
0),,(),( >ΔΔ+≥ xyxxGyxG (11.14)
• Ako je zyx ≤≤ , tada je:
),(),(),( zxGzyGyxG =+ (11.15)
to se može objasniti i rečima: Količina napora uložena za povećanje pouzdanosti sistema od x do z jednaka je zbiru napora uloženih za povećanje pouzdanosti od x do y i od y do z.
• G(0, y) ima izvod h( y) tako da je yh(y) striktno rastuća funkcija u intervalu (0<y<1).
Znači, ovom metodom se rešava zadatak koji se može formulisati na sledeći način:
Odrediti Ri* tako da izraz, ),( *
1i
n
ii RRG∑
=
, ima minimalnu vrednost, uz uslov da je:
*
1
* RRn
ii ≥∏
=
(11.16)
Može se pokazati da rešenje navedenog problema ima oblik:

Alokacija pouzdanosti
184
⎩⎨⎧
>≤
=0
0*0*
,,
kiRkiR
Ri
i (11.17)
gde je pouzdanost delova sistema poređana u monotono rastućem poretku, tj. nRRR ≤≤≤ ...21 .
Broj k0 predstavlja maksimalnu vrednost j tako da je:
njrR
RR j
j
n
jii
j ,...,2,1,
1
1
1
*
==
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
<
∏−
−=
(11.18)
gde je po definiciji Rn-1=1.
Broj R0* dat je izrazom:
0
0
1
1
1
**0
k
n
kjjR
RR
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
∏−
−=
(11.19)
Prema tome, zahtevana pouzdanost sistema se računa sledećim obrascem:
∏+
+=
=1
1
*0
*
0
0)(n
kjj
k RRR (11.20)

Ugradnja pouzdanosti u konstrukciju novog uređaja
185
12. UGRADNJA POUZDANOSTI U KONSTRUKCIJU NOVOG UREĐAJA
12.1. Pouzdanost u procesu konstruisanja
Pri ugrađivanju pouzdanosti u fazi konstrukcije sistema neophodno je poštovati sledeće:
• konstruktor stvara konstrukciju i odgovoran je za sve njene karakteristike, uključujući i pouzdanost
• svaka konstrukcija ima sebi svojstven nivo pouzdanosti
• ovaj svojstveni nivo pouzdanosti se postiže kada se konstrukcija izrađuje u skladu sa zahtevima, ali se retko stvarno postiže ili održava ta pouzdanost. Stvarna ili dostignuta pouzdanost je zbog određenih kompromisa proizvodnje, rukovanja, skladištenja itd, uvek manja od sopstvene pouzdanosti;
• svaki složeni proizvod mora startovati sa konstrukcijom koja ima vrlo visoku sopstvenu pouzdanost da bi se takav proizvod isporučio kupcu sa željenom ili traženom stvarnom pouzdanošću.
Postizanje visoke sopstvene pouzdanosti u nekom složenom sistemu može biti veoma skupo, kako po pitanju troškova, tako i po pitanju vremena, ali se može nadoknaditi smanjivanjem proizvodnih i eksploatacionih problema kada se obezbedi tražena stvarna pouzdanost. Ukoliko konstrukcija ne poseduje visoku svojstvenu pouzdanost, nemoguće je postići traženu stvarnu pouzdanost u eksploataciji.
Da bi se postigla visoka sopstvena pouzdanost, moraju se preduzeti mere, počev od koncepta konstrukcije, pa sve do kraja razvoja i završetka konstrukcije. Postojanje kriterijuma u pogledu pouzdanosti obezbediće potpuno i adekvatno razmatranje zahteva pouzdanosti. Glavna opasnost je zbog mogućih previda konstruktora, nedostatka znanja iz specifičnih oblasti i opravdanja ponašanja nepostojećim razlozima. Kako ni jedan konstruktor ne zna sve, on konsultuje stručne saradnike. Pod pritiskom vremenskih rokova, konstruktor ne vrši sva ispitivanja, a posledice nepouzdanosti mogu biti posebno opasne ako su vezane za bezbednost.
Prvobitne zahteve postavljene u fazi konstruisanja potrebno je kritički razmatrati i revidirati dobijanjem novih iskustava, znanja i podataka posle ispitivanja sistema u fazama razvoja i proizvodnje.
12.2. Pogodnost održavanja u procesu konstruisanja
Proces konstruisanja sistema prilikom razmatranja pogodnosti održavanja se može shvatiti razumevanjem procesa konstruisanja datog na slici 12.2.

Ugradnja pouzdanosti u konstrukciju novog uređaja
186
FORMULACIJAVREDNOSTI
MODELA
SINTEZAALTERNATIVNIH
REŠENJA
ANALIZA I/UISPITIVANJE
PROCENA ODLUKA
OPTIMIZACIJA
KRITERIJUMINFORMACIJA INFORMACIJA
Slika 12.2. Proces konstruisanja sistema
Ulazni parametar za proces konstruisanja je informacija o potrebama u vezi sa sistemom, uslovima korišćenja, ograničenjima, njegovoj konstrukciji i ostalom što je značajno.
Problem se definiše u delu formulacija vrednosti modela.
Tu se prihvataju i organizuju informacije koje se odnose na ciljeve i ograničenja sistema. Pored toga, ovde se formulišu i kriterijumi za efektivnost sistema, pomoću kojih se procenjuju moguća rešenja sistema. Bez ovih kriterijuma ne bi bila moguća optimizacija sistema. Kada je problem definisan i uspostavljeni kriterijumi za efektivnost sistema, mogu se sintetizovati moguća rešenja za zadovoljenje zahteva. Ove mogućnosti se zatim analiziraju ili ispituju, a rezultati se procenjuju u odnosu na uspostavljene kriterijume efikasnosti. Na osnovu toga se donosi odluka da li je konstrukcija optimalna ili je potrebna iteracija. Najčešće je potrebno izvršiti određeni broj iteracija i taj proces se naziva optimizacija. Isprekidanom linijom na slici 12.2. je prikazan slučaj kada procena i iteracija zahtevaju modifikaciju modela.
Kada je konstrukcija ustanovljena, ona se prenosi drugima na realizaciju.
Proces konstruisanja sistema može se primeniti prilikom razmatranja pogodnosti održavanja.
1. Ulazna informacija – ulazni zahtevi u vezi sa pogodnošću održavanja često su nekompletni i u primitivnom obliku. Da bi se ova informacija iskoristila u procesu konstruisanja sistema, potrebno je odgovoriti na sledeća pitanja:
i. Zašto se sistem konstruiše – operativni zahtevi
ii. Kakvi su zahtevi u pogledu uslova korišćenja – ograničenja vezana za korišćenje i raspoloživa sredstva, politiku održavanja itd;
iii. Koji su ciljevi održavanja – koncept održavanja, zahtevi u vezi sa efektivnošću sistema, troškovi;
iv. Kada se sistem može održavati – profil zadatka koji sistem treba da obavi, preventivno u odnosu na korektivno održavanje,
v. Na kom nivou će se vršiti održavanje – prvi, drugi, treći nivo;
vi. Kako će se vršiti održavanje – popravka, zamena ili odbacivanje, remont itd.
vii. Ko će vršiti održavanje – posluga, kvalifikovano ljudstvo;

Ugradnja pouzdanosti u konstrukciju novog uređaja
187
2. Formulacija vrednosti modela (kriterijum efikasnosti) – za formulisanje kvalitativnih i kvantitativnih ciljeva koristi se ulazna informacija. Kvantitativni kriterijumi pogodnosti odražavanja (dozvoljeno vreme zastoja, vreme između održavanja itd.) doprinose uspostavljanju merila efikasnosti, koje će se koristiti za procenu konstrukcije sistema u vezi sa pogodnošću održavanja.
3. Sinteza modela pogodnosti održavanja konstrukcije – ova faza se komplikuje činjenicom da nije moguće kvantitativno izraziti sve fizičke promenljive veličine koje su važne za pogodnost održavanja. Ne postoji opšti model pogodnosti održavanja. Kombinovanjem faktora koji su značajni za pogodnost održavanja (minimalno vreme zastoja itd.) moguće je konstruisati jedan koncept modela.
4. Analiza pogodnosti održavanja – ona se odnosi na predviđanje i demonstraciju postignutih rezultata date konstrukcije u pogledu pogodnosti održavanja, pri čemu se obično izračunava, procenjuje ili meri vreme zastoja u simuliranim operativnim uslovima. Tipične analitičke metode obuhvataju simulaciju, predviđene pogodnosti održavanja, alokaciju i demonstraciona ispitivanja.
5. Procena pogodnosti održavanja – sastoji se u poređenju pogodnosti održavanja sa kriterijumima efektivnosti sistema, radi donošenja odluke da se konstrukcija prihvati ili da se vrše dalje iteracije.
6. Donošenje odluke – u toku svake faze se donose odluke da je ona završena i da se može preći na drugu ili da je potrebno vršiti iteraciju tekuće faze što neki kriterijum nije optimalno zadovoljen.
7. Optimizacija – optimizacija je iterativni proces koji se koristi za modifikovanje modela sistema, analizu rezultujućih promena, procenu i donošenje odluka. Proces se vrši sve dok troškovi naredne iteracije više nisu u srazmeri sa očekivanim povećanjem dobiti. Moguće je vršiti optimizaciju zahteva u vezi sa pogodnošću održavanja nezavisno od ostalih parametara sistema.
8. Izlazna informacija – ova informacija se odnosi na karakteristike konstrukcije koje se pojavljuju na konstrukcijskim crtežima i koje uključuju i karakteristike u vezi sa pogodnošću održavanja. Ukupni napori u vezi sa pogodnošću održavanja usmereni su na to da će, sa visokim nivoom poverenja, sistem koji je proizveden u skladu sa konstrukcijskim karakteristikama imati traženu efektivnost.
12.3. Principi konstruisanja u pogledu pouzdanosti
U tabeli 12.1. dati su opšti principi konstruisanja u pogledu pouzdanosti, koji ni u kom slučaju ne predstavljaju sve što se može javiti u nekoj situaciji u praksi. Sve što je navedeno u ovoj tabeli treba pažljivo razmotriti i videti da li je primenjivo u datoj situaciji. Ove principe treba poštovati u najvećoj mogućoj meri, a po potrebi se tabela može i proširivati.

Ugradnja pouzdanosti u konstrukciju novog uređaja
188
U ovoj tabeli su nabrojani aspekti pouzdanosti koje treba razmotriti prilikom konstruisanja nekog sistema:
Tabela 12.1 Neki opšti principi konstruisanja u pogledu pouzdanosti 1. Konstruisati tako da se otkazi spreče ili svedu na minimum. 2. Konstruisati poštujući princip jednostavnosti. 3. Predvideti stavljanje elemenata u pripravnosti kada je potrebno postići traženu pouzdanost. 4. Predvideti periodična ispitivanja, ispitnu opremu i proveru delova koji su podložni otkazima. 5. Predvideti elemente boljeg kvaliteta i materijal koji će zadovoljiti vek trajanja sistema i izdržati
maksimalno očekivana opterećenja. Cenu elemenata treba uporediti sa troškovima održavanja, nekorišćenjem sistema, itd.
6. Predvideti periodična održavanja. 7. Koristiti elemente koji ne zahtevaju održavanje u toku dugog niza godina. 8. Obezbediti jednostavna periodična podešavanja delova podložnih otkazu. 9. Obezbediti samopodešavanje delova podložnih otkazu.
10. Povećati jednoobraznost delova (standardizacija, itd.) 11. Identifikovati oblike otkaza, sprečiti početne otkaze i predvideti odgovarajuća upozorenja. 12. Obezbediti odgovarajuće stepene sigurnosti između vrednosti kritičnog i radnog opterećenja. 13. Koristiti konstrukcije sa dokazanom pouzdanošću. 14. Koristiti delove sa dokazanom pouzdanošću. 15. Koristiti manji broj delova za obavljanje više funkcija. 16. Razmotriti sve uticaje ljudskog faktora. 17. Koristiti modularne konstrukcije, da bi se olakšala zamena u slučaju otkaza u toku korišćenja. 18. Smanjiti opterećenje elektrotehničkih i drugih delova da bi se povećao vek trajanja. 19. Smanjiti ekstremna opterećenja i preterane varijacije opterećenja (npr. predvideti zaštitu od udara
visokih napona). 20 Obezbediti temperaturnu stabilnost korišćenjem grejača ili klima uređaja. 21. Kontrolisati nivo vlažnosti u svim uslovima korišćenja i uskladištenja. 22. Obezbediti izolaciju od udara ili sposobnost da se takvi uslovi podnesu. 23. Smanjiti izlaganje toploti i hladnoći ili povećati sposobnost da se podnesu takvi uslovi. 24. Izbegavati međusobni kontakt nezaštićenih različitih elemenata. 25. Predvideti sigurnosne uređaje za sprečavanje nenamernog razrešavanja. 26. Predvideti zaštitnike da bi se sprečilo da nepozvana lica promene kalibraciju ili oštete delove. 27. Omogućiti jednostavne provere od strane posluge u cilju konstatovanja otkaza koji postoje. 28. Konstruisati tako da se spreče ili svedu na minimum otkazi u toku skladištenja. 29. Predvideti signale uređaja koji upozoravaju na početak otkaza. 30. Predvideti odgovarajuću dijagnostičku opremu za proveru otkaza koji predstoje. 31. Koristiti hermetički zaptivene module da bi se sprečili otkazi tih modula u toku korišćenja i
skladištenja. 32. Koristiti električne kontakte – odgovarajuće veličine i od kvalitetnog materijala da bi se sprečili otkazi.
Takvi kontakti su rastavljivi utikači, relea, četkice generatora i motora, itd. Pri tome se koriste kvalitetne legure, srebrne prevlake, metali otporni na koroziju, živini prekidači, lemljeni spojevi, itd.
33. Koristiti u kalemovima (generatori, transformatori itd.) izolaciju provodnika koja može da podnese visoke temperature.
34. Koristiti električnu izolaciju koja neće pucati sa starenjem i koje je dovoljno jaka da može izdržati grube uslove pri pokretanju sistema ili pri radu na održavanju.
35. Konstruisati tako da se spreči pogrešna montaža ili izostavljanje delova. Tipične konstrukcione greške su stavljanje identičnih rastavljivih utikača jedno pored drugog, delovi koje se mogu montirati na više
načina, sklopovi kod kojih nije moguća brza provera spojeva, itd. 36. Omogućiti primenu ispitivanja bez razaranja kad god je to praktično i moguće. 37. Predvideti automatsku montažu i proveru kada je potrebno obezbediti pouzdanost. 38. Predvideti funkcionalna ispitivanja najveće moguće količine proizvoda koja je dozvoljena datim
troškovima, da bi se osigurala maksimalna pouzdanost serije. 39. Predvideti dovoljne karakteristike bezbednosti da bi se zadovoljili propisi u pogledu bezbednosti. 40. Analizirati iskustva sa istim ili sličnim sistemima, koji su ranije postojali, u vezi MTBF, MTTR, itd, da
bi se utvrdili načini i sredstva za poboljšanje sistema koji se razmatra. 41. Identifikovati standardne delove, alate i ispitnu opremu sa dokazanom pouzdanošću, koji će biti
kompatibilni za korišćenje kod sistema koji se razmatra.

Ugradnja pouzdanosti u konstrukciju novog uređaja
189
12.4. Pogodnost održavanja i pouzdanost uređaja
Da bi se zadovoljili zahtevi u pogledu pogodnosti održavanja treba poštovati principe date u tabeli 12.2. Ni u kom slučaju to nisu svi principi, tako da se navedena lista može proširiti zavisno od konkretne situacije. Sve što je navedeno u ovoj tabeli treba dobro razmotriti i videti da li je primenjivo u datoj situaciji.
U ovoj tabeli su nabrojani minimalni aspekti pogodnosti održavanja koje treba razmotriti prilikom konstruisanja nekog sistema:
Tabela 12.2 Neki opšti principi konstruisanja u pogledu pogodnosti održavanja
1. Smanjiti ili eliminisati potrebu za održavanjem. 2. Smanjiti obim, frekvenciju i kompleksnost potrebnog zadatka održavanja. 3. Smanjiti troškove održavanja u toku veka trajanja sistema. 4. Smanjiti nivo potrebnih kvalifikacija ljudstva za održavanje i zahteve u pogledu dodatnog obučavanja. 5. Uspostaviti maksimalnu frekvenciju i opseg preventivnog održavanja. 6. Smanjiti obim složenosti teksta u uputstvima za održavanje. 7. Predvideti takve karakteristike u okviru sistema i njegovih delova koje će rezultirati u minimalnom
vremenu zastoja. 8. Obezbediti da posle isporuke sistema budu na raspolaganju jednostavni, adekvatni i zadovoljavajući
tehnički podaci u vezi održavanja. 9. Smanjiti srednje vreme popravke sistema.
10. Obezbediti optimalan pristup svim delovima koji zahtevaju često održavanje, proveru ili zamenu. 11. Predvideti brzu i sigurnu identifikaciju delova koji nezadovoljavajuće rade ili rade na granicama
performansi. 12. Osigurati da su zadovoljeni svi aspekti u pogledu ljudskog faktora. 13. Predvideti optimalnu sposobnost za verifikovanje performansi, predviđanje i lociranje
nezadovoljavajućeg rada i vršenje podešavanja. 14. Predvideti adekvatnu, jasnu i brzu identifikaciju delova koji mogu biti popravljeni ili zamenjeni. 15. Smanjiti količinu i vrstu alata i opreme neophodne za održavanje sistema. Eliminisati, gde god je
moguće potrebu za korišćenjem specijalnog alata. 16. Izbegavati korišćenje kritičnih materijala, skupih i teških procesa. 17. Predvideti maksimalnu zamenjivost. 18. Osigurati maksimalnu bezbednost ljudstva i opreme u toku izvođenja održavanja. 19. Osigurati da nema ozbiljnih neželjenih karakteristika sistema u pogledu operativnosti ili održavanja
koje utiču na ljudstvo ili na opremu (zračenje, buka itd.). 20. Predvideti veličinu i vrstu elemenata koji zahtevaju minimum održavanja i servisiranja u toku veka
trajanja. 21. Predvideti da se lako i brzo vrše provere i podešavanja u toku servisiranja elemenata za uključenje i
isključenje uređaja. 22. Predvideti dovoljan broj odgovarajućih ispitnih mesta i omogućiti da se njima može lako prići. Ispitna
mesta treba da budu sposobna da prihvate automatsku opremu za ispitivanje, kada je to praktično. 23. Osigurati da je na raspolaganju sva oprema za ispitivanje i za podešavanje. 24. Obezbediti adekvatnu zaštitu ljudstva za održavanje od električnog udara. 25. Obezbediti da se ne pojavljuju otrovni gasovi koji bi uticali na ljudstvo za održavanje. 26. Obezbediti odgovarajuće uređaje za signaliziranje opasnosti. 27. Predvideti jednostavnu, laku i brzu zamenu otkazanih elemenata. 28. Predvideti da svi natpisi budu jasno čitljivi posle duge upotrebe. 29. Predvideti da sistem bude konstruisan u odnosu na minimalnu težinu, uzimajući u obzir pouzdanost,
izdržljivost i održavanje. 30. Ustanoviti vrednost srednjeg vremena između otkaza, srednjeg vremena popravke i vremena zastoja
sistema.
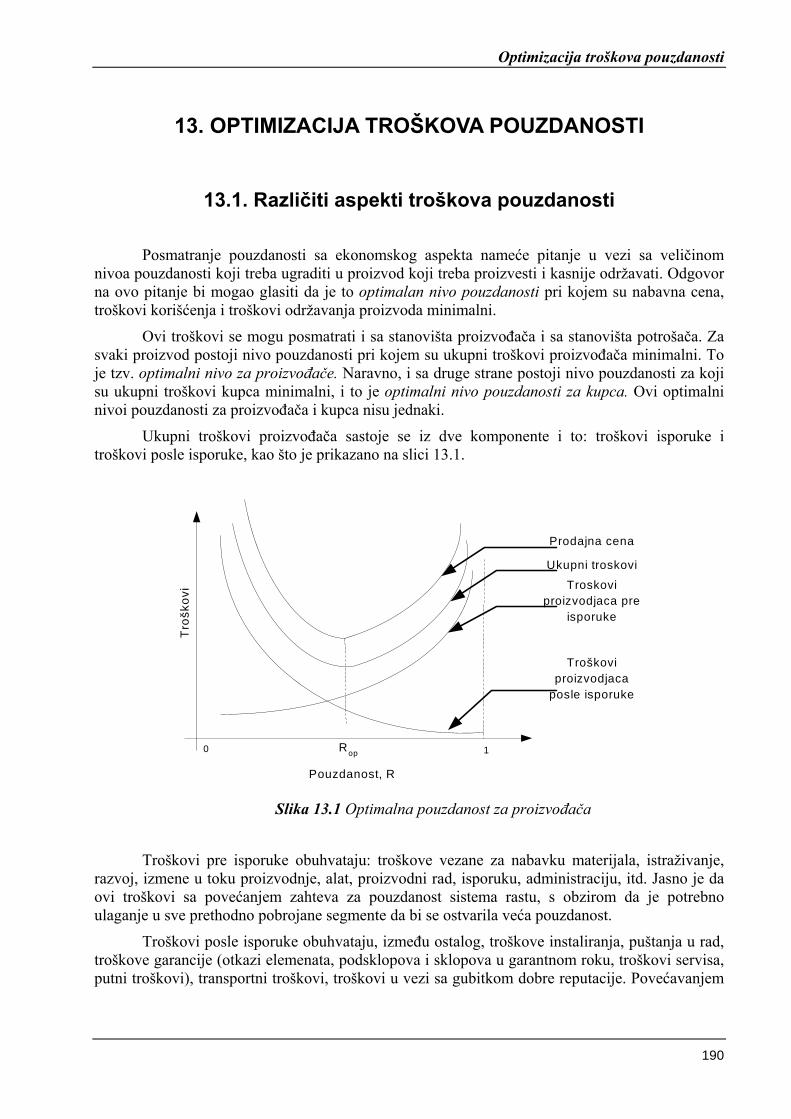
Optimizacija troškova pouzdanosti
190
13. OPTIMIZACIJA TROŠKOVA POUZDANOSTI
13.1. Različiti aspekti troškova pouzdanosti
Posmatranje pouzdanosti sa ekonomskog aspekta nameće pitanje u vezi sa veličinom nivoa pouzdanosti koji treba ugraditi u proizvod koji treba proizvesti i kasnije održavati. Odgovor na ovo pitanje bi mogao glasiti da je to optimalan nivo pouzdanosti pri kojem su nabavna cena, troškovi korišćenja i troškovi održavanja proizvoda minimalni.
Ovi troškovi se mogu posmatrati i sa stanovišta proizvođača i sa stanovišta potrošača. Za svaki proizvod postoji nivo pouzdanosti pri kojem su ukupni troškovi proizvođača minimalni. To je tzv. optimalni nivo za proizvođače. Naravno, i sa druge strane postoji nivo pouzdanosti za koji su ukupni troškovi kupca minimalni, i to je optimalni nivo pouzdanosti za kupca. Ovi optimalni nivoi pouzdanosti za proizvođača i kupca nisu jednaki.
Ukupni troškovi proizvođača sastoje se iz dve komponente i to: troškovi isporuke i troškovi posle isporuke, kao što je prikazano na slici 13.1.
0 1
Tro
škov
i
Pouzdanost, R
Rop
Prodajna cena
Ukupni troskovi
Troskoviproizvodjaca pre
isporuke
Troškoviproizvodjaca
posle isporuke
Slika 13.1 Optimalna pouzdanost za proizvođača
Troškovi pre isporuke obuhvataju: troškove vezane za nabavku materijala, istraživanje, razvoj, izmene u toku proizvodnje, alat, proizvodni rad, isporuku, administraciju, itd. Jasno je da ovi troškovi sa povećanjem zahteva za pouzdanost sistema rastu, s obzirom da je potrebno ulaganje u sve prethodno pobrojane segmente da bi se ostvarila veća pouzdanost.
Troškovi posle isporuke obuhvataju, između ostalog, troškove instaliranja, puštanja u rad, troškove garancije (otkazi elemenata, podsklopova i sklopova u garantnom roku, troškovi servisa, putni troškovi), transportni troškovi, troškovi u vezi sa gubitkom dobre reputacije. Povećavanjem

Optimizacija troškova pouzdanosti
191
pouzdanosti ovi troškovi se smanjuju, što je i logično, jer se smanjuje i broj otkaza, pa samim tim i svi troškovi koje oni za sobom povlače.
Sabiranjem troškova pre i posle isporuke dobijaju se ukupni troškovi proizvođača. Kada se ovim ukupnim troškovima doda profit, dobija se prodajna cena. Sa grafika (slika 13.1) vidi se da za određeni nivo pouzdanosti postoji minimalna prodajna cena i to je, prethodno spomenuti, optimalni nivo pouzdanosti za proizvođača, Rop.
Ukupni troškovi kupca sastoje se iz troškova kupovine proizvoda i dodatnih troškova. Na slici 13.2 prikazani su troškovi koje ima kupac nakon kupovine određenog proizvoda.
0 1
Tro
škov
i
Pouzdanost, R
Rop
Ukupni troskovikupca
Kupovna cena(=prodajna cena)
Dodatni troskovi
Rok
Slika 13.2 Optimalna pouzdanost za kupca
Dodatni troškovi obuhvataju: troškove održavanja vezane za materijal, troškove održavanja vezani za rad, troškove zamene delova koji su otkazali, a nisu pokriveni garancijom, troškove prouzrokovane zastojem zbog nefunkcionisanja proizvoda, troškove popravki. Ovi dodatni troškovi opadaju sa porastom pouzdanosti sistema, jer se smanjuje broj otkaza sistema, a samim tim i troškovi popravki, nefunkcionisanja.
Na slici 13.2 se takođe uočava da postoji nivo pouzdanosti za koji su ukupni troškovi kupca minimalni, i to je tzv. optimalni nivo pouzdanosti kupca, Rok. Takođe, sa iste slike se uočava da je uvek Rok > Rop .
Prema kojem od ovih optimalnih nivoa će se projektovati sistem, zavisi od više faktora i to: vrste kupca, namene proizvoda, dobiti proizvođača, konkurentne sposobnosti proizvoda, itd.
Određivanje optimalnog nivoa pouzdanosti moguće je tek po prikupljanju neophodnih podataka o vremenu do otkaza, vrsti otkaza, primarnim i sekundarnim otkazima, uslovima pod kojima se proizvod koristi, šemi održavanja koja se primenjuje, itd.

Optimizacija troškova pouzdanosti
192
13.2. Matematički model optimizacije troškova pouzdanosti
Da bi se konstruisao neki sistem koji ima optimalan nivo pouzdanosti uz minimalne troškove, polazi se od sledećeg obrasca koji daje vezu između pouzdanosti sistema i troškova vezanih za ostvarivanje i održavanje tog nivoa pouzdanosti:
21 ln kmkCR +⋅= (13.1)
gde su:
k1 i k2 – konstante
CR – troškovi pouzdanosti i
m - srednje vreme između otkaza.
Gubitak koji nastaje usled otkaza sistema, dat je izrazom:
)1( RNCCG −⋅⋅= (13.2)
gde je:
CG – troškovi usled nastalih gubitaka,
C – troškovi za izvršavanje odrađenog zadatka, za koji je sistem namenjen i
N - broj zadataka koje sistem može da obavlja.
Takođe, poznato je da se u jednačini 13.2. pouzdanost R izračunava prema sledećem obrascu:
mt
eR−
= (13.3)
gde je sa t označeno vreme izvršenja zadatka sistema.
Prema tome, ukupni troškovi dati su sa:
GRU CCC += (13.4)
tj. može se pisati u obliku:
)1(ln 21 RNCkmkCU −⋅⋅++⋅= (13.5)
Da bi se odredilo optimalno srednje vreme između otkaza sistema, m mora se rešiti sledeća jednačina:
Optimizacija troškova pouzdanosti
193
0=dm
dCU (13.6)
tj. jednačina (13.7):
01 =⋅⋅−dmdRNC
mk
(13.7)
Za visoke vrednosti srednjeg vremena između otkaza sistema (m) izraz sa desne strane jednačine (13.3) može se razviti u red, pa je u tom slučaju pouzdanost data sa:
mtR −= 1 (13.8)
pa je
2mt
dmdR
= (13.9)
Zamenom u relaciju (13.7) dobija se:
021 =⋅⋅−
mtNC
mk
(13.10)
pa je otud optimalno srednje vreme između otkaza, m jednako:
1ktNCm ⋅⋅
= (13.11)
13.3. Matematički model za utvrđivanje opravdanosti multipliciranja elemenata
U slučaju da neki element sistema ima veliki broj otkaza, a da mu se ne može povećati nivo pouzdanosti, vrši se multipliciranje takvog elementa u okviru sistema. Ovo multipliciranje dovodi do povećanja vremena između otkaza, ali istovremeno uvodi nove troškove, troškove multipliciranja, pored već postojećih troškove usled otkaza.
Troškovi gubitka usled otkaza dati su jednačinom:
)1( RNCNCCG −⋅⋅−Θ⋅⋅= (13.12)

Optimizacija troškova pouzdanosti
194
gde su:
C – troškovi izvođenja zadatka,
N – broj zadataka i
Θ – verovatnoća otkaza
Kako je verovatnoća otkaza n paralelnih elemenata data sledećom jednačinom:
nR)1( −=Θ (13.13)
to su onda troškovi gubitka usled otkaza dati sa:
nG RNCC )1( −⋅⋅= (13.14)
Ako troškovi za izradu jednog elementa iznose K, onda za n elemenata troškovi izrade iznose:
KnCn ⋅= (13.15)
pa su ukupni troškovi:
nGU CCC += (13.16)
odnosno:
KnRNCC nU ⋅+−⋅⋅= )1( (13.17)
Da bi odredili optimalan broj multipliciranih elemenata sistema koji odgovara minimalnom ukupnom trošku potrebno je rešiti sledeću jednačinu po n:
0)1ln()1( =+−−⋅⋅= KRRNCdn
dC nU (13.18)
S obzirom da je pouzdanost, R data sa izrazom 13.3 rešavanjem jednačine 13.18 dobija se izraz za optimalan broj multiplikacija određenog elementa u okviru sistema:
)1ln(
1ln(ln
mt
mt
e
eNC
K
n−
−
−
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
−
⋅−
= (13.19)

Pouzdanost softvera
195
14. POUZDANOST SOFTVERA
14.1. Kvalitet softvera
Količina softverskih proizvoda naglo je porasla sa razvojem informacionih tehnologija. Upravljanje kvalitetom ovih proizvoda postalo je jako bitno i u tu svrhu definisana su uputstva za obezbeđenje kvaliteta softvera.
Jedno od uputstava definisano je međunarodnim ISO 9003 standardom, gde su date smernice za obezbeđenje kvaliteta softvera pri njihovom razvoju, isporučivanju i održavanju. Na osnovu ovih uputstava definisan je i JUS standard.
Standardom ISO / IEC 9126 definisano je sledećih šest karakteristika softvera: funkcionalnost, pouzdanost, upotrebljivost, efikasnost, pogodnost za održavanje i prenosivost. Ovih šest karakteristika obuhvata dvadeset jednu podkarakteristiku (slika 1.1).
Funkcionalnost predstavlja skup svojstava koja opisuju šta softver treba da radi da bi zadovoljio postavljene zahteve.
Pouzdanost određuje skup svojstava koja predstavljaju mogućnost softvera da održi svoj nivo performansi pod određenim uslovima i u određenom vremenskom intervalu. Ograničenja u pouzdanosti su posledica grešaka u zahtevima, projektu i implementaciji.
Upotrebljivost predstavlja skup svojstava koja predstavljaju količinu uloženog truda određenog ili pretpostavljenog skupa korisnika koji upotrebljavaju softverski proizvod za njegovo korišćenje, kao i pojedinačnu cenu takve upotrebe.
Efikasnost se definiše kao skup svojstava koja predstavljaju odnose između nivoa performansi softvera i količine upotrebljenih resursa pod određenim uslovima. Ovde se pod resursima podrazumevaju drugi softverski proizvodi, hardverska oprema, materijali (papir, diskete ...) i usluge osoblja koje rade na održavanju.
Pogodnost za održavanje se definiše kao skup svojstava koja predstavljaju neophodnu količinu uloženog truda da bi se izvršila određena modifikacija. Modifikacije mogu biti korekcije, poboljšanja i adaptacije softvera na promene u okruženju.
Prenosivost predstavlja skup svojstava koja predstavljaju mogućnost softvera da se prenese iz jednog u drugo okruženje. Okruženje može biti organizaciono, hardversko i softversko.
Sa slike 14.1 se vidi da su podkarakteristike pouzdanosti softvera: zrelost, otpornost prema greškama i oporavljivost. Svaki od ovih pojmova će biti posebno definisan.
Zrelost odražava učestalost greške usled nedostatka u softveru.
Otpornost prema greškama odražava sposobnost softvera da održi određeni nivo performansi u slučaju greške u softveru ili narušavanja njegovog određenog interfejsa.
Oporavljivost odražava sposobnost softvera da u slučaju greške ponovo uspostavi svoj nivo performansi i da povrati podatke na koje je direktno uticao, kao i vreme i napore potrebne za to.

Pouzdanost softvera
196
KA
RA
KTE
RIS
TIK
EK
VA
LITE
TA S
OFT
VE
RA
FUN
KC
ION
ALN
OS
T
POGODNOST
TACNOST
POVEZANOST
USAGLAŠENOST
SIGURNOST
PO
UZD
AN
OS
TU
PO
TRE
BLJ
IVO
ST
ZRELOST
OTPORNOST PREMA GREŠKAMA
OPORAVLJIVOST
RAZUMLJIVOST
POGODNOST ZA UCENJE
IZVRŠIVOST
EFI
KA
SN
OS
TP
OG
OD
NO
ST
ZAO
DR
ŽAV
AN
JEP
RE
NO
SIV
OS
T
PONAŠANJE U VREMENU
PONAŠANJE SA RESURSIMA
POGODNOST ZA ANALIZU
IZMENJIVOST
STABILNOST
POGODNOST ZA ISPITIVANJE
PRILAGODLJIVOST
POGODNOST ZA INSTALIRANJE
SAOBRAZNOST
ZAMENJIVOST
Slika 14.1 Karakteristike kvaliteta softvera po ISO 9126

Pouzdanost softvera
197
Da bi se ocenio kvalitet softvera moraju se sumirati rezultati vrednovanja različitih karakteristika (slika 1.2). Prvo se mora pripremiti procedura pomoću npr. tabele odlučivanja ili procenjive srednje vrednosti. Procedura vrednovanja ima tri koraka: merenje, rangiranje i ocenjivanje. Merenje se primenjuje na softver kao proizvod. Rezultat je vrednost na skali metrike. Rang se određuje na osnovu merene vrednosti. Ocenjivanje je završna faza procesa vrednovanja softvera. Rezultat ocenjivanja je iskaz kvaliteta softverskog proizvoda (zadovoljava ili ne zadovoljava).
merena vrednost
metricka skala
vrlo dobro
dobro
dovoljno
loše
rangovi
zadovoljava
ne zadovoljava
Slika 14.2 Merna skala i rangovi
14.2. Pokazatelji pouzdanosti softvera
Pouzdanost softvera je jedna od karakteristika kvaliteta softvera. Više se odnosi na funkcionalnost programa nego na njegov dizajn i više na njegovu dinamičnost nego na njegovu statičnost. Takođe, odnosi se na pojave otkaza i menja se tokom razvoja softvera.
Bitno je već na početku razdvojiti pojmove otkaza i greške. Otkaz se definiše kao neprihvatljivo udaljavanje programskih operacija od programskih zahteva. Greška je softverski defekt koji rezultira kao mana, gde pod manom smatramo softverski defekt koje uzrokuje otkaz. Otkaz se pojavljuje u vreme izvršenja programa, pa predstavlja dinamički proces. Otkaz može biti i predugo izvršenje programa. Jedna greška može biti uzrok više otkaza, dok po definiciji više grešaka ne može izazvati jedan otkaz. Grešku pravi programer i one nastaju usled:
• nedovoljne komunikacije između ljudi koji rade na istom projektu ili ista osoba, ali usled vremenske distance
• nedovoljnog znanja o području primene, načina izrade i programskog jezika
• nekompletne analize slučajeva koji se mogu pojaviti
• greške u transkripciji
Pouzdanost softvera se može definisati kao verovatnoća da dati program radi po nameri korisnika, tj. bez otkaza, u odgovarajućem okruženju i u određenom vremenskom intervalu.

Pouzdanost softvera
198
Naravno, cilj je da se verovatnoća učini što većom, po mogućstvu 1. Za određivanje pouzdanosti najčešće se koriste analitički modeli, čiji su parametri procenjeni iz prikupljenih podataka o ranijim otkazima sistema.
Često se pokazatelji pouzdanosti vezuju za vreme, koje možemo posmatrati sa tri aspekta:
• vreme izvršavanja, tj. CPU vreme (τ)
• kalendarsko vreme (τ)
• vreme časovnika, tj. suma vremena prolazaka od početka do kraja programa, ne računajući periode prekida
Najčešće je u upotrebi vreme izvršavanja.
Pojava otkaza se može opisati sa četiri veličine, a to su:
• vreme otkaza
• vreme između otkaza
• broj otkaza u nekom vremenskom intervalu
• broj otkaza za zadato vreme
Sve ove veličine su slučajne, ali ne i nepredvidive, jer je mesto pojave greške u programu nepoznato i jer su uslovi pod kojima će program biti izvršen nepoznati.
Slučajni procesi se karakterišu sa raspodelom verovatnoće i promenom procesa sa vremenom. Slučajni procesi čija raspodela varira sa vremenom nazivaju se nehomogeni.
Definišu se i dve funkcije slučajnog procesa:
• funkcija srednje vrednosti μ
• funkcija intenziteta otkaza α; to je zapravo brzina promene funkcije srednje vrednosti ili broj otkaza u jedinici vremena. Intenzitet otkaza je izvod po vremenu funkcije srednje vrednosti.
Proces se naziva homogenim, kada nema promene u softveru, tj. nema debagovanja ili ispravljanja softvera, dok u suprotnom imamo nehomogen proces.
Neka je M(t) slučajan proces koji predstavlja broj otkaza do trenutka t. Tada se funkcija srednje vrednosti definiše kao μ(t) = E[M(t)], tj. kao očekivani broj otkaza u trenutku t. Funkcija intenziteta otkaza λ(t) predstavlja trenutnu brzinu promene očekivanog broja otkaza. Ovde vreme može biti bilo koje od prethodna tri navedena, ali se zbog kompatibilnosti sa pouzdanošću hardvera koristi vreme izvršavanja.
Na pouzdanost softvera utiču sledeći faktori: nalaženje grešaka, uklanjanje grešaka i okruženje. Pronalaženje grešaka zavisi od karakteristika razvoja koda, da li je napravljen ili modifikovan, od njegove veličine, faze razvoja, tehnologije korišćenog alata i iskustva programera. Otklanjanje grešaka zavisi od vremena, operacionog profila i kvaliteta ispravljanja. Okruženje je uslovljeno operacionim profilom, a to je skup različitih akcija i operacija koje program može da izvrši, i verovatnoće pojavljivanja ovih operacija.
Načini dobijanja pouzdanosti softvera su: merenje, procena i predviđanje. Merenje pouzdanosti koristi podatke o intervalima otkaza dobijene aktiviranjem programa u njegovom stvarnom eksploatacionom okruženju. Procena pouzdanosti se zasniva na podacima o intervalima pojave prekida pri testiranju softvera. Procena se koristi radi utvrđivanja trenutne ili buduće pouzdanosti. Predviđanje pouzdanosti koristi karakteristike softvera, a ne intervale otkaza, radi

Pouzdanost softvera
199
utvrđivanja softverske pouzdanosti. Predviđanje u najvećem broju slučajeva uzima u obzir sledeće faktore: veličina programa, kompleksnost itd.
Kada su greške uklonjene, u fazi testiranja, intenzitet otkaza ima tendenciju opadanja sa vremenom, a pouzdanost tendenciju rasta. Ako je sistem stabilan i bez promene u kodu, intenzitet otkaza i pouzdanost ostaju konstantni. U suprotnom, intenzitet otkaza teži manjem porastu, a pouzdanost manjem padu.
Može se govoriti o dva tipa intenziteta: intenzitet otkaza za vreme testiranja, λt, i intenzitet otkaza u operacionoj fazi, λop. Uvodi se faktor testiranja: A = λt/ λop, koji je znatno veći od 1, jer je λt >> λop.
Gustina grešaka meri se brojem grešaka na 1000 linija izvornog koda (KSLOC – Kilo Source Line of Code). Može se vršiti samo procena ove veličine. Za slučaj softvera velikog obima prihvatljiva je gustina greške manja od 0.1 greške/KSLOC, dok je za ostale primene prihvatljivo 5 grešaka/KSLOC. Greškama se može zadati nivo značajnosti prema otkazu koje prouzrokuju.
Raspoloživost softvera predstavlja očekivani deo vremena za koje će deo softvera ili sistem funkcionisati prihvatljivo. Korisnik treba da odredi šta podrazumeva pod terminom “prihvatljivo”, a u zavisnosti od toga šta predstavlja otkaz. Dakle, definicija zavisi od uticaja date veličine na sistem, troškova eksploatacije drugih faktora. Korisnik teži da odredi različite klase otkaza, različitih intenziteta i utvrdi zahteve za svaku od njih.
14.3. Greške u softveru
Poznata je činjenica da greške nastaju u svim fazama razvoja softvera. Prema tome, skoro polovina vremena razvoja mora biti utrošena na otklanjanje grešaka ponovnim “prolaženjem” kroz program, inspekcijom i testiranjem, što često košta pola budžeta. Dodatni troškovi će postojati ako i posle isporuke ostanu greške.
Pažljive analize intenziteta greške prema vremenu projektovanja pomoću Rejlijeve (Raleigh) krive pokazuju da izvesni parametri imaju jak uticaj na ukupnu pouzdanost softvera:
1
2
3
4
5
Velicina sistema
Vreme razvoja
Velicina osoblja
Produktivnost
MBI indeks

Pouzdanost softvera
200
1. broj grešaka proporcionalan je veličini sistema (slika 14.3), što znači da srednje
vreme do otkaza (MTTF – Mean Time to Failure) opada sa porastom veličine sistema. Na taj način, manje grešaka može da se otkrije u nekom fiksnom intervalu, što vodi padu efikasnosti (slika 14.4).
broj grešaka
velicina sistema
prosecna standardnadevijacija
Slika 14.3 Zavisnost broja grešaka od veličine sistema
broj grešakaotkrivenih u nekomfiksnom intervalu
velicina sistema
prosecna standardnadevijacija
Slika 14.4 Zavisnost oktrivenih grešaka od veličine sistema
2. Generalno, porast vremena razvoja softverskog sistema dovodi do smanjenja broja grešaka iz sledećih razloga:
i. potprogrami mogu biti izvršeni korektnim redosledom
ii. postoji dovoljno vremena da se završi faza dizajniranja
iii. mogući su kontrolisanje programa kao i njegovo testiranje
iv. novo osoblje može biti angažovano u cilju postizanja veće brzine
Na slici 14.5 prikazan je broj očekivanih defekta do postizanja pouzdanosti od
99,9% u zavisnosti od vremena razvoja.
ocekivane greške sapouzdanošcu 99,9%
vreme razvoja
minimalno vremerazvoja
Slika 14.5 Zavisnost broja grešaka od vremena razvoja
Sa druge strane, treba imati na umu da povećanje vremena razvoja povećava
troškove.
3. Nije neophodno detaljno objašnjavati kako porast broja osoblja utiče na smanjenje grešaka, ali je takođe potrebno imati na umu da i porast broja osoblja podrazumeva porast troškova.

Pouzdanost softvera
201
4. Broj defekta se smanjuje sa porastom produktivnosti. Na slici 14.6 prikazan je odnos između broja defekta i indeksa produktivnosti (PI – Productivity Index) posmatran za program koji sadrži 100 000 linija.
Veličina PI je izvedena iz parametra produktivnosti:
34
31 Time
BEffort
ESLOCProdPar ∗
⎥⎦⎤
⎢⎣⎡
= (14.1)
Vrednosti ove funkcije prikazuju se jednom od 36 kvantizovanih vrednosti.
broj grešaka sapouzdanošcu 99,9%
indeks produktivnosti
1000
2000
3000 8
10
1315
18
Slika 14.6 Zavisnost broja grešaka od indeksa produktivnosti
5. MBI (Manpower Buildup Index) predstavlja brzinu kojom raste broj osoblja za vreme glavnog projektovanja. Sastoji se iz skale od 1 do 6:
i. Sporo
ii. Umereno sporo
iii. Umereno
iv. Brzo
v. Veoma brzo
vi. Ekstremno brzo
Mali MBI indeks znači i mali broj grešaka.
Upravljanje razvojem softvera, očigledno, ima uticaja na njegovu pouzdanost. Evo šta treba preduzeti, da bi se ona povećala:
• Pažljivo analizirati sva mesta podložna greškama
• Tokom razvoja, trebalo bi da se formira zapis o greškama sa opisom tipa defekta, ozbiljnosti i mesta pojavljivanja

Pouzdanost softvera
202
• Rejlijevu krivu bi trebalo iskoristiti za planiranje broja defekta u toku vremena razvoja i vremena održavanja. Kontinualno treba pratiti aktuelnu brzinu pojave grešaka i porediti je sa planiranom.
• Parametre koji direktno utiču na pojavu grešaka bi trebalo modifikovati
• Proizvod ne bi trebalo isporučiti prerano.
14.4. Modelovanje pouzdanosti softvera
Prvi modeli pouzdanosti softvera bili su zasnovani na pretpostavkama koje su važile za modele pouzdanosti hardvera i zbog toga su bili jako kritikovani.
Većina sadašnjih modela koristi elemente slučajnih procesa i najviše se zasnivaju na vremenu. Opis modela svodi se, dakle, na opis neke funkcije vremena, npr. funkcija srednje vrednosti ili funkcija intenziteta otkaza. Vrednosti parametara nekog modela mogu se dobiti na sledeće načine:
• predikcijom : iz osobina softvera i procesa razvoja softvera. Može se uraditi pre samog izvršavanja programa
• procenom: primenjuju se statističke metode nad podacima o ranijim otkazima programa. Jasno je da se ovaj postupak može sprovesti tek pošto se program izvršava dovoljno dugo.
Modeli nisu egzaktni i ne prezentuju stvarnost u celini. Takođe, mora se imati u vidu i nepreciznost koja se javlja prilikom određivanja parametara. Iz ovih razloga, parametri se zadaju sa određenim intervalima poverenja (opseg vrednosti u kome se sa određenom verovatnoćom očekuje da se parametar nalazi)
Dobar model pouzdanosti trebalo bi da ima sledeće karakteristike:
• daje dobru predikciju ponašanja otkaza u budućnosti
• omogućuje procenu i izračunavanje pokazatelja pouzdanosti
• jednostavan je
• može se primeniti na različite softverske proizvode
• zasniva se na jasnim pretpostavkama
Može se koristiti za:
• kvalitativnu procenu softverske tehnologije
• procenu razvoja za vreme testiranja
• kontrolu operativnih osobina softvera i kontrolu novih mogućnosti, kao i promene u dizajnu
• upotpunjavanja pogleda na softverski proizvod, kao i proces razvoja softvera
Većina modela podrazumeva da se program izvršava u nepromenljivom okruženju, tj. da se programski kod i operacioni profil ne menjaju. Neki od modela dozvoljavaju izvestan broj

Pouzdanost softvera
203
grešaka, što je naročito pogodno u slučaju programa koji se koristi, a za koji se zna da postoje greške.
Da bi moglo da se predvidi pojava otkaza u budućnosti, vrednosti parametara modela ne bi trebale da se menjaju za vreme za koje se vrši predikcija. U suprotnom, treba sačekati da se pojavi dovoljan broj otkaza da bi se mogla izvršiti ponovna procena parametara ili treba uračunati promenu parametara, što je nepraktično zbog povećanja kompleksnosti.
Postoje dve osnovne vrste modela pouzdanosti softvera: modeli rasta pouzdanosti i statistički modeli. Modeli rasta pouzdanosti određuju pouzdanost koristeći podatke o otkazima programa u prošlosti, dok statistički modeli koriste odzive (uspeh/neuspeh) programa na slučajan broj test primera, bez ispravljanja uočenih grešaka.
Modeli rasta pouzdanosti se prema prirodi otkaza dela na:
• Modele na bazi vremena između otkaza. Oni pretpostavljaju da vreme između i-tog i (i-1)-vog otkaza sledi raspodelu sa parametrima koji zavise od preostalog broja grešaka u programu za vreme ovog intervala i očekuje se da će ovi intervali biti duži kako se greške ispravljaju. S obzirom da je vreme otkaza slučajna promenljiva i posmatrane vrednosti podležu statističkim promenama, ovo ne može biti tačno za svaki par susednih vremena otkaza. Ova klasa sadrži dosta jednostavnih modela, ali i par dosta složenih.
• Modele prebrojavanja otkaza. Ovi modeli posmatraju broj otkaza u određenom vremenskom intervalu. Očekuje se da se broj otkaza u jedinici vremena smanjuje kako se greške ispravljaju.
• Modeli ubacivanja greški i modeli koji se zasnivaju na ulazima. Ovo su vremenski nezavisni modeli. U modelima koji ubacuju greške, izvestan broj grešaka se ubacuje u program, zatim se program testira i snimaju se otkazi koji su rezultat postojećih i ubačenih grešaka. Koristeći ove podatke vrši se procena ukupnog broja grešaka. U modelima koji se zasnivaju na ulazima, mogući ulazi u program se dele na skupove ekvivalentnih klasa, a svaka klasa je najčešće u vezi sa nekom putanjom programa. Program se testira za svaki od ovih skupova. Pouzdanost se određuje iz dobijenog broja otkaza za vreme izvršavanja ovih test slučajeva.
Dakle, svaki od ovih modela ima različite pretpostavke i može se primeniti samo u određenim fazama razvoja softvera. Na primer, u fazi dizajna ne može se koristiti ni jedan od modela, u fazi testiranja delova ne mogu se koristiti vremenski zavisni modeli, u integralnom testiranju može se koristiti većina postojećih modela, pri testiranju prihvatljivosti primenjuju se modeli prebrojavanja otkaza i modeli koji se zasnivaju na ulazima, a u operacionoj fazi najpogodniji su modeli prebrojavanja otkaza.
Neki od zaključaka donetih nakon detaljne analize svih modela od kraja šezdesetih godina dvadesetog veka su sledeći: koristiti vreme izvršavanja u cilju uprošćavanja modela, razdvojiti otkaze i greške, za određivanje parametara modela koristiti metode procene, pronaći neki kriterijum za poređenje, izvršiti klasifikaciju modela, prikupiti dobre podatke, prilagoditi model specifičnostima različitih aplikacija, koristiti intenzitet otkaza umesto srednjeg vremena otkaza itd.
Modeli po kriterijumu vremena mogu koristiti kalendarsko vreme i vreme izvršenja. Modeli koji koriste vreme izvršenja su uspešniji. Na primer, jedan telefonski upravljani sistem može da ima vreme izvršenja od 10 sati/danu, dok neka specijalna matematička procedura može raditi samo nekoliko minuta/danu. U oba slučaja je kalendarsko vreme 24h, ali se njihova

Pouzdanost softvera
204
vremena izvršavanja dosta razlikuju, dok njihov intenzitet otkaza zavisi sa druge strane od vremena koliko se izvršavaju.

Pouzdanost i raspoloživost telekomunikacionih sistema
205
15. POUZDANOST I RASPOLOŽIVOST TELEKOMUNIKACIONIH SISTEMA
15.1. Uvod
Svaka savremena mreža bi trebalo da poseduje osobinu detektovanja kvarova i da vrši neku vrstu “samopopravke” pre nego što krajnji korisnik (end user) registruje bilo kakav kvar u komunikaciji.
Postoje dve vrste tehnika za povećanje pouzdanosti sistema i to su zaštitne tehnike i tehnike ponovnog uspostavljanja veza. Za obnavljanje veze pogođene kvarom prve tehnike koriste unapred dodeljene resurse, što rezultuje visokom redudansom (odnos ukupnog i radnog kapaciteta). Kod restauracionih tehnika koriste se trenutno raspoloživi resursi tj. traži se nova putanja nakon što se desi kvar. Zbog toga se zaštitne tehnike u savremenim telekomunikacionim sistemima koriste u posebnim slučajevima, dok su restauracione tehnike zastupljene u mrežama paučinastog tipa (mesh).
Osnovne zaštitne tehnike su zaštita tipa 1+1, 1:1, 1:N i zaštitni prstenovi prikazani na slikama 15.1-15.4.
Slika 15.1 1+1 šema za zaštitu
Slika 15.2 1:1 šema za zaštitu

Pouzdanost i raspoloživost telekomunikacionih sistema
206
Slika 15.3 1:N šema za zaštitu
Slika 15.4 Prstenovi sa zaštitom (UPSR i BLSR)
Najznačajnije restauracione tehnike su tehnike restauracije linkova i tehnike restauracije putanja, slike 15.5 i 15.6, respektivno. Plavom bojom je označena radna putanja, a crvenom restauraciona. Mesto kvara je označeno sa p1.
Slika 15.5 Primer restauracije linkova Slika 15.6 Restauracija na bazi putanja
15.1.1. Prstenaste i paučinaste strukture
Postoje dva osnovna i potpuno različita pristupa mrežnom dizajnu – to su prsten topologija (ring) i paučinasta topologija. Samim tim postoje i dva različita načina u rešavanju problema ponovnog uspostavljanja veza usled kvara u mreži.
Prsten topologija je dobila ime zbog toga što podaci idu samo u jednom smeru. Stabilnost na kvarove se kod ovakvih struktura postiže ili korišćenjem dvosmernih prstenova sa mogućnošću prebacivanja (BLSR – Bidirectional Line Switched Rings) ili pomoću
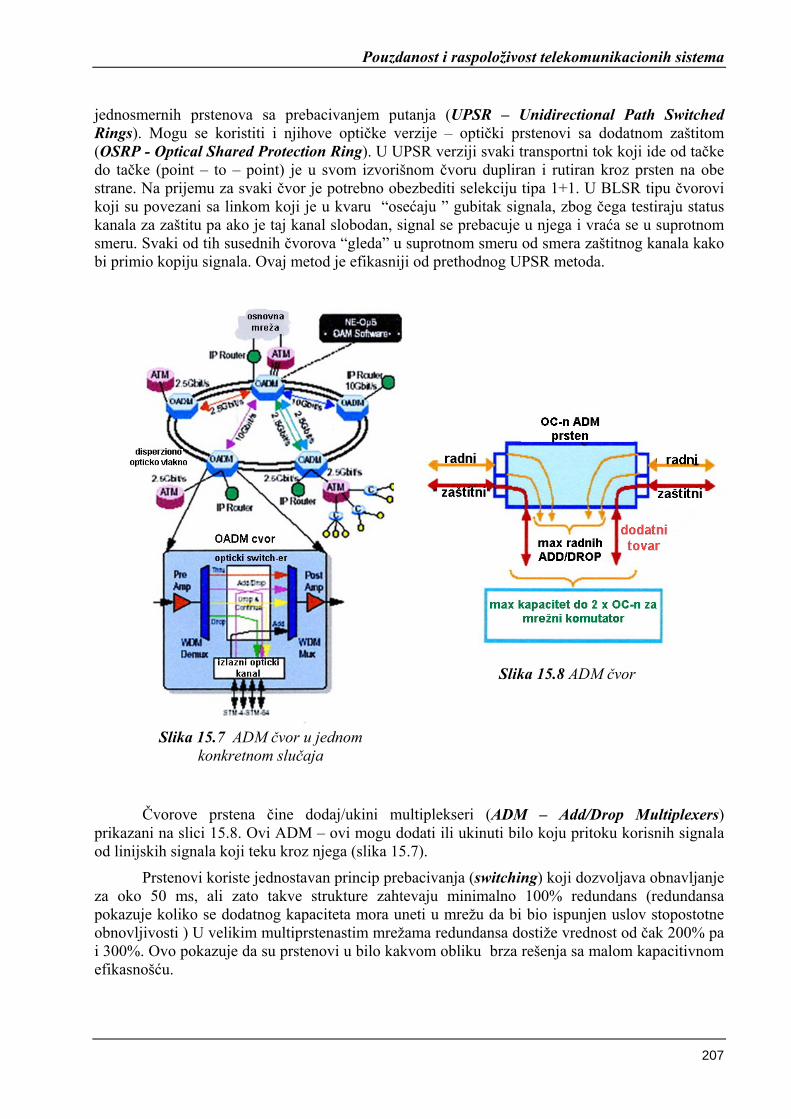
Pouzdanost i raspoloživost telekomunikacionih sistema
207
jednosmernih prstenova sa prebacivanjem putanja (UPSR – Unidirectional Path Switched Rings). Mogu se koristiti i njihove optičke verzije – optički prstenovi sa dodatnom zaštitom (OSRP - Optical Shared Protection Ring). U UPSR verziji svaki transportni tok koji ide od tačke do tačke (point – to – point) je u svom izvorišnom čvoru dupliran i rutiran kroz prsten na obe strane. Na prijemu za svaki čvor je potrebno obezbediti selekciju tipa 1+1. U BLSR tipu čvorovi koji su povezani sa linkom koji je u kvaru “osećaju ” gubitak signala, zbog čega testiraju status kanala za zaštitu pa ako je taj kanal slobodan, signal se prebacuje u njega i vraća se u suprotnom smeru. Svaki od tih susednih čvorova “gleda” u suprotnom smeru od smera zaštitnog kanala kako bi primio kopiju signala. Ovaj metod je efikasniji od prethodnog UPSR metoda.
Čvorove prstena čine dodaj/ukini multiplekseri (ADM – Add/Drop Multiplexers) prikazani na slici 15.8. Ovi ADM – ovi mogu dodati ili ukinuti bilo koju pritoku korisnih signala od linijskih signala koji teku kroz njega (slika 15.7).
Prstenovi koriste jednostavan princip prebacivanja (switching) koji dozvoljava obnavljanje za oko 50 ms, ali zato takve strukture zahtevaju minimalno 100% redundans (redundansa pokazuje koliko se dodatnog kapaciteta mora uneti u mrežu da bi bio ispunjen uslov stopostotne obnovljivosti ) U velikim multiprstenastim mrežama redundansa dostiže vrednost od čak 200% pa i 300%. Ovo pokazuje da su prstenovi u bilo kakvom obliku brza rešenja sa malom kapacitivnom efikasnošću.
Slika 15.7 ADM čvor u jednom konkretnom slučaja
Slika 15.8 ADM čvor

Pouzdanost i raspoloživost telekomunikacionih sistema
208
Paučinasta topologija je prvenstveno interesantna zbog svoje imunosti na kvarove kanala/čvorova, jer se tok podataka može rutirati oko nefunkcionalnih i zauzetih čvorova. Restauracija paučinastih mreža se zasniva na korišćenju digitalnih komutatora. U slučaju da tokovi podataka naiđu na nefunkcionalnu tačku, tada se ovi tokovi preusmeravaju drugim, rezervnim (nezauzetim), putanjama. Ovim dinamičkim načinom rutiranja se postiže da se svaka jedinica rezervnog kapaciteta može upotrebiti na bilo kom mestu u mreži, čime se postiže stoprocentna redundansa.
15.1.2. Metod prekrivanja prstenova
Zbog pozitivnih osobina paučinaste mreže, kao što su kapacitvna efikasnost i fleksibilnost, većina mrežnih operatera se opredelila za, na dugoročnom planu isplativu, paučinastu DWDM arhitekturu (Dense Wavelength Division Multiplex). Kako uglavnom svi mrežni operateri raspolažu sa prstenastom arhitekturom ekonomičan prelazak na paučinastu strukturu rešava se metodom prekrivanja prstenova. Ovaj prelazak podrazumeva razmontiranje i ponovno korišćenje kapaciteta prstena u paučinastom modu rada.
Iskorišćenje kapaciteta prstena u paučinastoj strukturi izvodi se preko ADM čvorova. Kao što je prikazano na slici 15.8 ADM ima mogućnost pristupa zaštitnom kanalu i ima dodaj/pusti pristup. Da bi multiplekser radio kao element paučinaste strukture mora se konvertovati tako što će se “pusti” konfiguracija amputirati, a portovi se povezati na dodatni saobraćaj komutatora. Ideja je da se obezbedi pristup obema vezama ADM čvora u prstenu, kao i zaštitnom kapacitetu. Na slici 15.9 se vidi plan prekrivanja jedne prstenaste strukture. Slika 15.9a pokazuje raspored dodatnih kapaciteta, a slike 15.9 b-d pokazuju koji su ADM – ovi konvertovani za pristup paučinastoj strukturi.
Slika 15.9 Postupak prekrivanja prstena

Pouzdanost i raspoloživost telekomunikacionih sistema
209
15.1.3. Osnovni model paučinaste strukture
Metod paučinaste strukture osnovnog modela posmatra retke mreže kao nove paučinaste mreže koje se sastoje od posebnih podmreža koje se nazivaju lanci. Retka mreža prikazana je na slici 15.10. To je bi – povezana mreža koja ssadrži lance sa čvorovima stepena 2. Paučinaste mreže su nastale kao rezultat usavršavanja dizajna paučinastih struktura sa osobinom restauracije veza kako bi se mogle prilagoditi retkim grafovima.
Slika 15.10 Karakterističan primer topologije retkog mrežnog grafa koji sadrži 55 čvorova, 62
veze, srednji stepen čvorova je 2.25 i sadrži 16 lančanih pod-mreža
Rezervni kapacitet je postavljen pored najvećeg radnog kapaciteta bilo koje veze u lancu i to je osbina za sve podmreže stepena 2 (prsten i lanac). Prsten je podmreža sastavljena od dvostepenih čvorova uređenih u krug, a lanac je povezani segment istih čvorova koji se ne zatvara. Kada se desi kvar nekog linka u lancu, sav radni kapacitet se preusmerava (loop – back) u suprotan smer lanca sve dok se ne naiđe na čvor stepena 3+. Na slici 15.11 a–b je prikazan način link – restauracionog dizajna na prstenastim strukturama zajedno sa fazom zaokretanja pri postupku restauracije [8].
Slika 15.11 Konekciono-restauracioni dizajn osnovnog modela paučinaste strukture; na istoj slici
je prikazana i faza zaokretanja i faza odbijanja i vraćanja pri restauraciji

Pouzdanost i raspoloživost telekomunikacionih sistema
210
Međutim,u paučinastoj strukturi osnovnog modela se pravi razlika između tipova transportnih tokova u vezi lanca. Zahtevi koji potiču i/ili se završavaju u čvoru lanca se nazivaju lokalni ili intra-lančani tokovi, dok zahtev koji putuje kroz lanac i koji ima poreklo i odredište izvan lanca ili u nekom od trostepenih čvorova se naziva ekspresni tok. Paučinasti dizajn nudi rezervni kapacitet koji je dovoljan samo za obezbeđivanje zaokretanja za intra-lančane tokove. Za preusmeravanja ekspresnih tokova nije obezbeđen rezervni kapacitet, zbog čega se dozvoljava da se ovi tokovi jednostavno odbiju i vrate (fail-back) do čvorova stepena 3+. Ovo preusmeravanje obavljaju susedni ADM – ovi, ali su sada lokalni tokovi podjednako usmereni kroz multipleksere. Ovo premošćavanje ADM – ova tokovi postižu na drugim talasnim dužinama ili drugom fiberu, čime se čuve propusni opseg jezgra multipleksera. To se vidi na slici 15.11(c) kao i da struktura ekspresnih tokova ostaje nepromenjena bez obzira gde je nastao kvar u lancu (za razliku od lokalnih tokova koji su promenjeni dodaj/pusti akcijama u čvorovima) i nemaju potrebu za zaokretanjem, već se odbijaju i vraćaju do 3+ čvorova. Odavde se zaključuje da rezervni kapacitet nije potreban unutar lanca za restauraciju ekspresnih tokova što predstavlja i uštedu rezervnog kapaciteta. Ovo je glavna ideja ovog koncepta.
15.1.4. Vrste paučinastih modela
Podela paučinastih modela izvršena je na osnovu kapacitivnih zahteva.
• 1+1 zaštita putanja
Drugi naziv ove metode je automatsko zaštitno prebacivanje (APS) i ono podrazumeva rutiranje sa unapred dodeljenim zaštitnim putanjama po kojima se istovremeno šalje radni zahtev (DP). Ovde su zahtevi najkraća rutirana putanja i jednaka alokacija resurasa sa obe strane čvora. U prijemnom delu bira se najbolji signal.
• Restauracija veza – šema sa dodeljivanjem rezervnog kapaciteta (SCA)
Ovo je prva varijanta restaurabilnog modela kod koga su zahtevi, prva najkraća radna putanja i optimalno dodeljivanje rezervnog kapaciteta.
• Restauracija veza – šema sa dodeljivanjem zajedničkih kapaciteta (Joint CA) Kod ovog modela minimizacija ukupnog i radnog kapaciteta vrši se optimizacijom radnih putanja.
• Meta – paučinasti model Opisan u prethodnom poglavlju.
• Zaštita sa zajednički deljenim rezervnim putanjama – SBPP
Ovde su zahtevi najkraća rezervna putanja i pojedinačno rastavljena rezervna ruta tipa end – to – end i prethodno je određena za svaki radni zahtev. Postoji signalizaciona faza koja u realnom vremenu vrši komutaciju zajedničkog deljenog kapaciteta. SBPP metod se ponekad naziva i metod zaštite putanja koji je nezavisan od kvarova. To je zbog toga što je ruta rezervne putanje nezavisna od mesta gde je na radnoj putanji nastao kvar.
• Restauracija putanja (Path Restoration) - "Path"

Pouzdanost i raspoloživost telekomunikacionih sistema
211
Ovde ne postoje unapred određene rezervne putanje u slučaju kvara kao kod SBPP, a zahtevi su prvo rutirani preko svojih najkraćih putanja pa se tek onda optimizuje rezervni kapacitet.
Na slici 15.12 a je prikazana master mreža sa 32 čvora i 51 – im linkom (mreža iz koje su izvedene ostali modeli 15.12 b – i ) [8].
Na slici 15.13 se vide rezultati ispitivanja [8] – zahtevi za radnim i rezervnim kapacitetom svake šeme na svim test mrežama. Ukupni zahtevani mrežni kapacitet koji je potreban da bi se zadovoljili uobičajeni zahtevi je suma svih krivih, a njihov odnos se naziva redundansa (rezervni/radni). Može se primetiti da skoro ne postoji razlika između zahteva za radnim kapacitetom bilo koje od šema. Između šema orijentisanih "ka vezama" (SCA, JCA) i šema koje su orijentisane "ka putanjama" (SBPP, Path) se nalazi paučinasti princip koji pokazuje kapacitivnu efikasnost kao SBPP i Path, a ima osnovne mehanizme zasnovane na restauraciji linkova. Ovo ima veze sa interpretacijom specifičnog premošćivanja vezanog za ekspresne tokove lančanih pod-mreža kao specifičnog tipa delimične restauracije putanja.
Slika 15.12 Master mreža (a) i mreže koje su izvedene iz nje (b-i)

Pouzdanost i raspoloživost telekomunikacionih sistema
212
Slika 15.13 Zavisnost cene radnog i rezervnog kapaciteta od srednjeg stepena povezanosti
15.1.5. Koncept p – krugova
Metod p – krugova je nastao kao hibrid prstenastog i paučinastog pristupa, pa se može okarakterisati kao unapred konfigurisani zaštitni krugovi u paučinastim mrežama.
Ovde se posmatraju p-krugovi koji su primenjeni na mreži sa osobinom prebacivanja pomoću električnih kola (circuit-switched). Inače, postoje dve vrste p-krugova. Prvi su tzv. linkni p-krugovi i oni štite pojedinačne kanale u okviru linka. Drugi su čvorno-okružujući p-krugovi i oni su manje bitni. Na slici 15.14(a) je prikazana mreža sa jednim linknim p-krugom [10].
Slika 15.14 Mreža sa jednim p-krugom (a) koja može zaštiti kružne linkove (b) i tetivne linkove
(c)-(d)

Pouzdanost i raspoloživost telekomunikacionih sistema
213
Taj p-krug je u mogućnosti da zaštiti sve kružnične linkove, kao što se vidi na slici 15.14(b). Pored toga, p-krug može da zaštiti i tetivne linkove. U slučaju kvara jednog takvog linka, svaki p-krug može zaštititi dve radne putanje na linku tako što obezbeđuje dve alternativne putanje oko p-kruga, što se može videti na slici 15.14 (c-d).
Slika 15.15 Konkretan primer zaštite od kvarova
Da bi se malo detaljnije objasnio postupak obnavljanja kod p-krugova koristi se slika 15.15(a)-(c). Na slici 15.15(a) je prikazan jedan primer p-kruga, a na slici 15.15(b) se javlja jedan kružnični kvar.
Kao kod prstenova (posebno kod BLSR tipa), p-krugovi se zaštićuju od tih kružničnih kvarova pomoću zaokretanja (loop-back). Na slici 15.15(c) se pokazuje kako se, na istom krugu, vrši restauracija kada se desi kvar tetivnih veza i linkova. Efikasnost pokrivanja u slučaju prikazanim na slici 15.15(c) je dva puta veća nego kod kružničnih kvarova, zbog toga što su dva rezervna puta raspoloživa iz svake jedinice zaštitnog kapaciteta p-kruga. Svi dosadašnji prstenovi (UPSR, BLSR, itd.) su omogućavali najviše jednu takvu putanju po jedinici zaštitnog kapaciteta i kao takvi su mogli samo da podrže kružnične kvarove. Dozvoljavanjem da se isti zaštitni kapaciteti koriste i za kružnične i za tetivne kvarove, pronađeno je da skup p-krugova kojim se mogu pokriti svi kvarovi zahtevaju 3 do 6 puta manje kapaciteta nego što bi se to zahtevalo u klasičnoj prstenastoj konfiguraciji.
P-krugovi mogu biti formirani od individualnih jedinica rezervnog kapaciteta na sistemima sa optičkim komutatorima i mogu biti logički preuređeni tako da se adaptiraju željenom obrascu rasta što kod prstenova nije bilo moguće, jer su objedinjavali radni i zaštitni kapacitet. Kako su p-krugovi isključivo deo rezervnog kapaciteta oni se mogu prilagoditi radnom nivou u bilo koje vreme, bez uticaja na radne zahteve. Suprotno tome, prstenovi samo potvrđuju putanje koje tokovi moraju uzeti umesto da se prilagode putanjama koje tok "želi" da ima.
Ekvivalent ADM čvoru u strukturi p-kruga sličan je "klasičnom" ADM-u po tome što ima dva linijska optička interfejsa na tzv. "istočnoj" i "zapadnoj" strani (svaki ima 50/50

Pouzdanost i raspoloživost telekomunikacionih sistema
214
radnog/rezervnog) i dodaj/pusti interfejs pomoću koga se može pristupiti pritokama. Razlika u odnosu na prstenasti ADM je u tome u ovom slučaju postoje dodatni radni interfejsi na "južnoj" strani tj. prema tetivnim vezama. Uopšteno, može postojati 2, 4, 6 ili više radnih veza/portova na toj strani. Rezultat svega je čvorni uređaj koji je prikazan na slici 15.16. Kvar može biti "obrađen" na bilo kom paru tetivnih interfejsa tako što se signali sa njih prebacuju na odgovarajuće "istočne" ili "zapadne" rezervne linije. Kombinacija osobina postavlja ovaj uređaj između prstenastog ADM-a i potpuno digitalnog komutiranog sistema.
Slika 15.16 Čvorni uređaj za mreže bazirane na p-krugovima, koji liči na ADM čvor
15.2. Mreže za Internet saobraćaj
Rast Internet saobraćaja je pouzrokovao razvoj savremenijih i pouzdanijih mreža u odnosu na standardne mreže koje nisu mogle da zadovolje uslove koje im postavljaju sve obimniji protoci podataka [11]. Mrežni modeli koji se danas razvijaju zasnovani su na optičkim transportnim mrežama (OTN), među kojima je i IP/MPLS (slika 15.17), nastao kao odgovor na skupi IP/ATM model sa SDH prenosom preko optičke transportne mreže.

Pouzdanost i raspoloživost telekomunikacionih sistema
215
Slika 15.17 IP/MPLS OTN mreža
Glavne aplikacije vezane za MPLS su: upravljanje tokom podataka, QoS, CoS i virtuelne privatne mreže (VPN).
15.2.1. Sposobnost brzog oporavka kod IP/MPLS modela
Ideja je zasnovana na mogućnosti da se oporavak od kvara obezbedi u optičkom nivou (premda se kvar može oporaviti i u IP/MPLS nivou). Razlog za to leži u činjenici da je u optičkom nivou protreban manji broj akcija za opravak, čime se scenario kvara pojednostavljuje što povećava brzinu opravka mreže od kvara. Međutim, postoje kvarovi čiji se oporovak ne može obaviti unutar optičkog nivoa. Primer je kvar IP rutera. Takođe, optički nivo nije u mogućnosti da popravi putanje u optičkom nivou, koje potiču ili se završavaju u pokvarenom optičkom komutatoru (OXC). To se može videti na slici 15.17. Sve ovo ukazuje na to da ako je cilj da mreža bude neosetljiva na kvarove, šeme za oporavak se moraju razvijati u oba nivoa mreže.
Pri projektovanju stabilne šeme (stabilna u odnosu na kvarove), javljaju se dve vrste problema. Prvi problem je povezan sa internom funkcionalnošću koja je potrebna u mreži da bi postojala koordinacija raznih akcija oporavljanja koje se dešavaju u oba nivoa. Drugi problem se tiče dodavanja rezervnog kapaciteta. Rezervni kapacitet u statičkim transportnim mrežama mora biti predviđen u oba nivoa mreže. Nasuprot tome, u inteligentnim transportnim mrežama se koristi višenivoska šema oporavka i tada je rezervni kapacitet alociran samo na optičkom nivou.
15.2.1.1. Statičke šeme za oporavak
Oporavak mreže se vrši u oba nivoa. Kao primer, navodimo pojedine mogućnosti za oporavak mreže od kvarova IP rutera u IP/MPLS nivou: MPLS sa ponovnim rutiranjem, FTCR sa ponovnim rutiranjem i MPLS sa lokalnom zaštitom. U svim navedenim slučajevima rezervni kapacitet mora biti ugrađen u IP nivo. Što se tiče OTN nivoa primeri šema za oporavak su: zaštita

Pouzdanost i raspoloživost telekomunikacionih sistema
216
putanja ili linkova, 1+1 zaštita putanja itd. Kao i u IP/MPLS nivou i ovde je prisutan rezervni kapacitet.
Prva i jednostavnija opcija statičke višenivoske šeme za oporavak je nazvana dupla ili redundantna zaštita gde šema oporavka u optičkom nivou štiti i rezervne resurse IP/MPLS nivoa.
Zbog rasipanja optičkih resursa koje je prisutno kod prve opcije moralo se pribeći poboljšanju šeme oporavka. Takav pristup problemu je doneo opciju nazvanu šema nezaštićenog rezervnog IP-a. Kako i sam naziv šeme govori radni kapacitet IP nivou je zaštićen u optičkom nivou dok rezervni IP kapacitet nije.
Treća opcija takođe podrazumeva poboljšanja i naziva se koncept zajedničkih zaliha rezervnih resursa (common pool). Glavno unapređenje u odnosu na prethodne dve opcije je to što je u ovom slučaju potrebno manje resursa u transportnom nivou.
15.2.1.2. Dinamičke ION šeme za oporavak
ION mreža – inteligentna optička mreža ima prednost u odnosu na druge tipove jer ona obezbeđuje potrebne kapacitete samo kada zatreba. Praktično, ona omogućava ukidanje rezervnog kapaciteta u IP nivou radi oporavka od kvarova. Međutim, u optičkom nivou rezervni kapacitet se podrazumeva zbog nastajanja kvarova u nižim nivoima mreže (presecanje kablova ili kvarovi optičkog komutatora). Takođe, prisutni su i zahtevi za određenim kapacitetom koji bi služio pri rekonfigurisanju IP tehnologije i preusmeravanje toka podataka na istom nivou.
Na slici 15.18 se vide različiti scenariji ION struktura: jedan slučaj je bez kvarova (nominalni) i po jedan za svaku rekonfigurisanu topologiju (pri kvaru samo jednog rutera).
Slika 15.18 Planiranje višenivovskih mreža: dimenzionisanje IP i OTN nivoa

Pouzdanost i raspoloživost telekomunikacionih sistema
217
Pomenuta rekonfiguracija topologije tokom kvara može biti bazirana na dva principa. U prvoj opciji cilj je da u svakom momentu postoji optimalna topologija koja bi bila u skladu sa novim obrascem transporta (npr. ne sme se dozvoliti da transport ulazi ili izlazi iz mreže preko neispravnog rutera). Dakle, pri nastanku kvara je potrebno ponovo proračunati i konfigurisati IP topologiju (Kleinrock metoda) da bi se postigla ona koja je optimalna. Preostali saobraćaj se tada preusmerava preko nove konfiguracije. Takvu opciju nazivamo ION mreža sa globalnim rekonfigurisanjem ili kraće ION – globalna.
U drugoj opciji se podrazumeva manja rekonfiguracija IP topologije pri pojavi kvara pa takvu strukturu zovemo ION sa lokalnim rekonfigurisanjem, kraće ION – lokalna. Zavisno od potreba novog saobraćaja kapaciteti linkova su smanjeni ili prošireni.
Zbog lakšeg poređenja dveju šema posmatrana je mreža u Italiji, prikazana na slici 15.19. Na levoj strani te mreže prikazana je optička topologija mreže, a na desnoj logička topologija IP-a koja je optimizovana za situacije bez kvarova (failure free) – nominalna IP topologija.
Slika 15.19 Mreža u Italiji na kojoj je vršena analiza procesa višenivovskog oporavka
Na slici 15.20 su prikazani rezultati dobijeni poređenjem statičkih i dinamičkih šema u pogledu troškova u izgradnji. Ukupna cena mreže je podeljena u tri dela: linijski troškovi – proporcionalni sa dužinom linkova, čvorni troškovi – proporcionalni broju kanala koji ulaze/izlaze iz optičkog komutatora i pritočni troškovi - za svaki ruter koji je pridružen optičkom komutatoru.
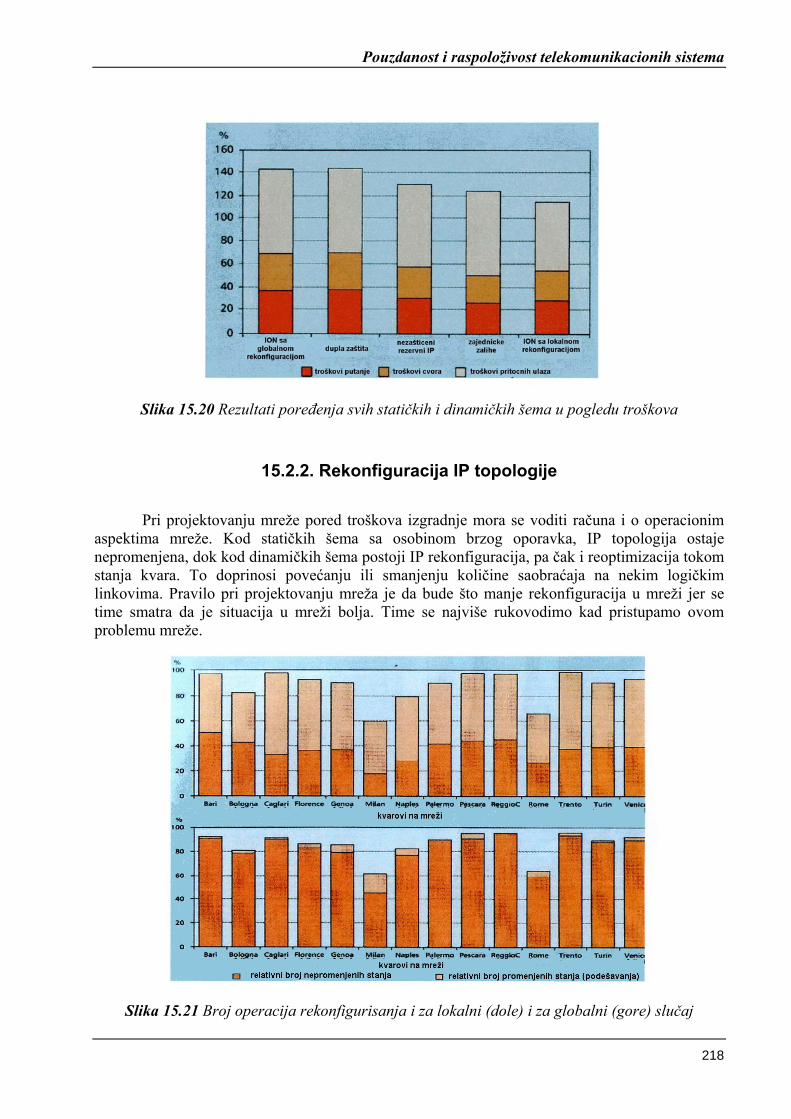
Pouzdanost i raspoloživost telekomunikacionih sistema
218
Slika 15.20 Rezultati poređenja svih statičkih i dinamičkih šema u pogledu troškova
15.2.2. Rekonfiguracija IP topologije
Pri projektovanju mreže pored troškova izgradnje mora se voditi računa i o operacionim aspektima mreže. Kod statičkih šema sa osobinom brzog oporavka, IP topologija ostaje nepromenjena, dok kod dinamičkih šema postoji IP rekonfiguracija, pa čak i reoptimizacija tokom stanja kvara. To doprinosi povećanju ili smanjenju količine saobraćaja na nekim logičkim linkovima. Pravilo pri projektovanju mreža je da bude što manje rekonfiguracija u mreži jer se time smatra da je situacija u mreži bolja. Time se najviše rukovodimo kad pristupamo ovom problemu mreže.
Slika 15.21 Broj operacija rekonfigurisanja i za lokalni (dole) i za globalni (gore) slučaj

Pouzdanost i raspoloživost telekomunikacionih sistema
219
Na slici 15.21 prikazan je broj zahtevanih operacija rekonfigurisanja i za globalnu (gore) i za lokalnu (dole) rekonfiguraciju za mrežu prikazanu na slici 15.19. Na grafikonu se vidi da je broj svetlosnih putanja koje ostaju na mestu i koje moraju da se postave za vreme uslova kvara identičan broju putanja u nominalnom stanju (ili stanju bez kvarova rutera), koje odgovara vrednosti od 100%.
Obe ION šeme, globalna i lokalna, uspevaju da rekonfigurišu IP topologiju tako da radi zaobilazeći kvarove rutera. Dinamička višenivoska šema sa osobinom brzog oporavka i sa ograničenim brojem rekonfigurisanih logičkih linkova (ION – lokalna) se po pitanju cene pokazala boljom u odnosu na komplikovanu, ali i efikasnu statičku višenivosku šemu sa osobinom brzog oporavka.
Napredna ION – globalna šema koja optimizuje IP topologiju u svim mogućim scenarijima kvarova zahteva znatno više rekonfigurisanja čime gubi na atraktivnosti u operacionom pogledu. Takođe, ta šema zahteva instalaciju više resursa u optičkom nivou nego lokalna, što je čini skupljom u odnosu na statičku šemu sa osobinom brzog oporavka.
Na kraju, najatraktivninje i najoptimalnije rešenje šeme za oporavak od kvara, u mrežama tipa IP/MPLS OTN, sa ograničenim brojem rekonfiguracija je ION lokalna šema koja obezbeđuje traženu sposobnost mreže za brzim oporavkom nakon kvara .
15.3. Projektovanje IP mreža
15.3.1. QoS (kvalitet servisa)
QoS tehnologija nam obezbeđuje korišćenje postojećeg propusnog opsega na najefikasniji način, dakle, bez povećanja propusnog opsega u mreži što je bio slučaj u prošlosti [14].
Ioako pruža moćne mogućnosti QoS tehnologija ne može eliminisati, pa čak ni redukovati nagomilavanja u mreži. Za jako opterećenu mrežu potrebno je uvesti dodatni propusni opseg. QoS “samo” daje prioritet transportu koji se zadesio u situaciji nagomilavanja.
Implementaciju QoS-a je moguće izvršiti hardverski i softverski i od načina same implementacije zavisi efikasnost koju će pružiti QoS. U realnim slučajevima, kombinacija hardvera i softvera je najbolje rešenje, jer hardver pruža dobru brzinu, a softver fleksibilnost i dalje mogućnosti proširenja tehnologije. Implementacija QoS-a duž cele mreže, odnosno od jedne do druge krajnje tačke (od-kraja-do-kraja), jedino daje prave rezultate, za razliku od implementacija na ivicama ili na jezgru mreže. Postoje dve osnovne tehnologije takvog QoS-a: konekciono orijentisana (tok kola) i beskonekciono orjentisana (tok podataka).
Najvažniji atributi QoS-a su propusni opseg, kašnjenje i gubitak paketa.
15.3.2. Diferencirani QoS
Kako se u savremenim mrežama zahteva istovremeno postojanje i QoS-a i parametara brze oporavljivosti na sve vrste kvarova, što dovodi do problema, jer nijedan od atributa obnovljivosti/oporavljivosti (raspoloživost mreže i vreme oporavka) nije podržan QoS

Pouzdanost i raspoloživost telekomunikacionih sistema
220
arhitekturom. Rešenje tog problema je predloženo u formi integrisanja QoS i zahteva obnovljivosti, odnosno u formi RD-QoS ili diferencirane QoS (Resilience Differentiated QoS) arhitekture, koja obezbeđuje osobinu obnavljanja komunikacije od-kraja-do-kraja u IP mrežama. Tehnologija je koncipirana na signalizaciji za obnovljivost što nije bio slučaj kod ranijih arhitektura QoS-a. Zavisno od toga kakva se QoS arhitektura koristi, signalizacija može biti tipa od-kraja-do-kraja, ili između aplikacije i granice mreže.
Mreža mora voditi računa da zahtevani QoS nivo bude očuvan i u slučaju kvara u mreži i to sa minimalnim vremenom prekida servisa. Time se zahteva pažljivo upravljanje propusnim opsegom i resursima tako da se ostavlja dovoljno rezervnih kapaciteta radi kontinuiranog pružanja servisa u svim mogućim slučajevima kvarova.
U normalnim uslovima (bez kvarova na mreži) transportom se upravlja pomoću QoS arhitekture, bez RD-QoS ekstenzije. U slučaju kvara na mreži paketi sa zahtevom za obnovljivost imaju prednost u odnosu na pakete niskog prioriteta, tj. pakete koji nemaju zahtev za obnovljivost. Ti zahtevi takođe imaju svoje stepene prioriteta, što znači da ukoliko se nađe, u isto vreme, više zahteva jedan od njih će biti stavljen u red na čekanje, dok će drugi biti odmah usluženi.
Postoji četiri klase oporavljivosti (u kojima su definisani pored ostalog i zahtevi za oporavljivost), Tabela 15.1. Njihova osnovna razlika je u vremenu oporavka.
Tabela 3.1 Detaljne osobine klasa oporavaka
Servisna klasa RC1 RC2 RC3 RC4
Zahtevi za oporavak Visoki Srednji Niski -
Vreme oporavka 10-100ms 100ms-Is 1-l0s -
Šema za oporavak od kvara Zaštita Restauracija Naknadno ratiranje Unapred ugovoren
saobraćaj
Postavljenje putanja za oporavak Unapred ustanovljeno Hitno, po zahtevu Odloženo, po zahtevu -
Alokacija resursa Unapred rezervacija Po zahtevu (osigurano) Po zahtevu (ako su dostupni) -
QoS nakon oporavka Isti Moguće privremeno smanjenje Može biti smanjen Nema QoS
15.3.3. Proširenje QoS-a
Definisana su dva modela od strane IETF grupe koja podržavaju kvalitet konekciono orijentisanih servisa sa obradom u realnom vremenu. Prvi metod je IntServ arhitektura (Integrated Services) sa RSVP (Resource Reservation Protocol) signalizacionim protokolom, prikazana na slici 15.22, a drugi je DiffServ arhitektura (Differentiated Services), prikazana na slici 15.23.

Pouzdanost i raspoloživost telekomunikacionih sistema
221
U IntServ modelu, QoS servisni zahtevi imaju signalizaciju na bazi transportnih tokova kroz mrežu, koji su tipa od-kraja-do-kraja, gde se zahtevani mrežni resursi rezervišu pomoću RSVP protokola. Za zahteve za obnovljivost sa visokim prioritetom (RC1 ili RC2), mreža mora da sačuva dovoljno rezervnog kapaciteta tako da u slučaju kvara mora biti pronađena alternativna putanja sa zahtevanim QoS-om, koja se postavlja tek nakon događaja i detekcije kvara. Ova arhitektura nije široko rasprostranjena zbog svojih problema sa skalabilnošću.
Kod DiffServ tehnike postoji mogućnost implementacije QoS-a za združene tokove podataka na bazi korak-po-korak: saobraćaj je razvrstan u servisne klase i onda se te klase u svakom koraku kroz mrežu posebno obrađuju. Pri pojavi kvara, mreža prosleđuje samo one pakete koji imaju odgovarajuću kombinaciju bitova u zaglavlju, tj. bite koji predstavljaju zahteve obnovljivosti određene RC klase. Postupak rada DiffServ arhitekture je slikovito prikazan na slici 15.23.
Slika 15.22 IntServ mrežna arhitektura
Slika 15.23 DiffServ mrežna arhitektura
15.3.4. MPLS opcije za oporavak
Problem brzog oporavljanja transportnih tokova, čije rešenje ne nudi QoS tehnologija, rešava MPLS princip. Najvažniji tipovi oporavka sistema su prikazani u tabeli 15.23.

Pouzdanost i raspoloživost telekomunikacionih sistema
222
Za slučaj zaštitnog prebacivanja, alternativna LSP (Label Switched Path) putanja je unapred ustanovljena, čime se dobija najkraći poremećaj transporta u slučaju kvara. Moguće je realizovati obe vrste zaštite, i 1+1 i 1:1. Kod 1+1 zaštite paketi se šalju istovremeno i po radnim i po alternativnim putanjama. U slučaju kvara radne putanje, prijemna strana bira pakete iz alternativne putanje. S druge strane, kod 1:1 tipa zaštite paketi se šalju na unapred definisanim alternativnim putanjama samo u slučaju kvara mreže. Takve putanje se nazivaju LSP-ovi za oporavak i one se ne koriste samo u slučaju kvara. U normalnom stanju mreže ti LSP-ovi se mogu koristiti i za prenos saobraćaja niskog prioriteta, pod uslovom da u slučaju pojave kvara takav saobraćaj bude ispušten iz transporta.
Tabela 15.2 Razne opcije oporavka
Model obnavljanja Zaštitno prebacivanje MPLS restauracija (ponovno rutiranje)
(IP) ponovno rutiranje
Alokacija resursa Unapred rezervisano Rezervisano po zahtevu
Korišćenje resursa Namenjeni resursi Deljeni resursi Dozvoljeni dodatni saobraćaj
Postavljanje putanja Unapred utvrđeno Unapred kvalifikovano Ustanovljeno po zahtevu
Područje delovanja Lokalne popravke Globalne popravke Naizmenični
izlazni par Višenivovska
popravka Koncentrisani domen
popravki
Događaj koji startuje proces obnavljanja Automatski ulazni signali Eksterno komandovanje
(OAM signalizacija)
Na slici 15.24 date su vrste MPLS šema za oporavak.
Slika 15.24 Vrste šema za oporavak

Pouzdanost i raspoloživost telekomunikacionih sistema
223
Šema sa zaštitnim prebacivanjem, kod koje je LSP za oporavak prethodno određen za svaki link, se naziva MPLS šema sa brzim ponovnim rutiranjem (fast reroute) i ona je prikazana na slici 15.24(a). Za ovu šemu nije potrebno uvođenje signalizacije tipa od-kraja-do-kraja jer čvor detektuje kvarove i odmah prebacuje ugroženi transport na putanju za oporavak. Pored pomenutog metoda sa brzim ponovnim rutiranjem, postoji još jedan metod zasnovan na tom principu – Haskinov metod (slika 15.24(b)).
Zaštitne šeme sa prebacivanjem (protection switchng) sa globalnim popravljanjem kvarova se zajednički nazivaju zaštita putanja (path protection),slika 15.24(c) . U ovom slucaju LSR ruter koji vrši funkciju prebacivanja mora biti obavešten da je radna LSP putanja ugašena da bi se ista prebacila na zaštitnu LSP putanju. Samim tim, potrebno je uvesti signalizaciju koja bi podržala takva obaveštenja o kvarovima (prošireni RSVP).
Šeme zasnovane na principu MPLS restauracije (slika 15.24 (d,e,f)) imaju protokol po kome LSP putanje za oporavak bivaju postavljane na zahtev, nakon hardverske detekcije kvara. Zbog vremena zahtevanog za proračun novih ruta, signalizaciju i rezervaciju resursa, MPLS restauracija je znatno sporija od odgovarajucih mehanizama zaštitnih metoda. Prednost im se ogleda u jevtinijim postupcima.
15.3.5. Veza RD-QoS-a i MPLS mehanizama oporavka
Kod klase RC1, kada se uspostavi LSP putanja sa visokim zahtevima za obnovljivost, MPLS mreža signalizira alternativne rute koristeći proširenja postojećih signalizacionih protokola. Nakon detekcije kvara na linku ili čvoru mreža odbacuje saobraćaj niskog prioriteta i prebacuje kvarom pogođene transportne tokove na LSP alternativne putanje.
Kod klase RC2, pri uspostavljanju LSP putanje signalizacija se vrši na upravo uspostavljenoj putanji. Mora se, takođe, obezbediti dovoljno rezervnog kapaciteta koji ce omogućiti pri pojavi kvara, alternativnu putanju sa zahtevanim stepenom QoS-a.
Za klasu RC3, važi pravilo da MPLS restauraciona šema nije konfigurisana i da nisu rezervisani dodatni resursi. Nakon kvara, mreža pokušava da uspostavi kvarom pokvareni sobraćaj klase RC3, ali tek pošto su završeni procesi oporavljivosti klasa RC1 i RC2. Oporavljivost može biti izvršena u IP nivou ili putem MPLS mreže. Za prvi slučaj je karakteristično vreme čekanja (hold-off time). Nakon tog vremena pomoću MPLS signalizacije, uspostavlja se LPS putanja koja ima redukovane QoS zahteve.
Transport sa klasom RC4 biva ispuštan iz transporta, kada nema dovoljno rezervnog kapaciteta, da bi se oslobodili resursi namenjenjeni servisima sa zahtevima obnovljivosti viših klasa (od RC1 do RC3). Kada nije prisutan kvar u MPLS domenu transport klase RC4 se tretira kao dodtani saobraćaj viših klasa.
15.3.6. Upravljanje transportom kod RD-QoS arhitekture
Sistem u kojem se vrši proračun za dodelu resursa svakog linka posebno, naziva se sistem za upravljanje mrežom (Network Menagement System – NMS). NMS dodeljuje resurse svakom ulazno/izlaznom paru čvorova za odgovarajuću klasu zahteva za obnovljivost i time čvor unapred

Pouzdanost i raspoloživost telekomunikacionih sistema
224
može znati da li poseduje dovoljne resurse za novi saobraćajni tok. Podela resursa na linku je prikazana na slici 15.25.
Slika 15.25 Podela resursa na linku
U svrhu praktične analize, RD-QoS Traffic Engineering (TE) procesa upravljanja transportom, razmatrana je pan-evropska COST 239 mreža prikazana na slici 15.26. Procesi su implementirani u C++ programskom jeziku.
Slika 15.26 Evropska COST 239 mreža
Rezultati ispitivanja su prikazani na slici 15.27 i tabeli 15.3 [6]. Za scenario sa više klasa obnovljivosti pretpostavljen je odnos RC1:RC2:RC3:RC4 od 1:2:3:4. TE proces je analiziran za tri RC1 mehanizma oporavljanja (zaštita linkova, Haskin-ov i zaštita putanja) i za tri RC2 mehanizma (restauracija putanja, restauracija linkova i restauracija između čvora koji se nalazi uzvodno od kvara i izlaznog čvora). Takođe, radi poređenja sa ostalim rezultatima izvršena su dodatna merenja za scenario bez rezervisanih dodatnih resursa (što odgovara 100%-nim RC3 zahtevima), scenario sa punom restauracijom (100%-ni RC2 zahtevi) i scenario sa punom zaštitom (100%-ni RC1). Na slici 3.6 dati su dupli grafici za slučajeve od B do J iz razloga primene dva slučaja klasa RC1 i RC2.
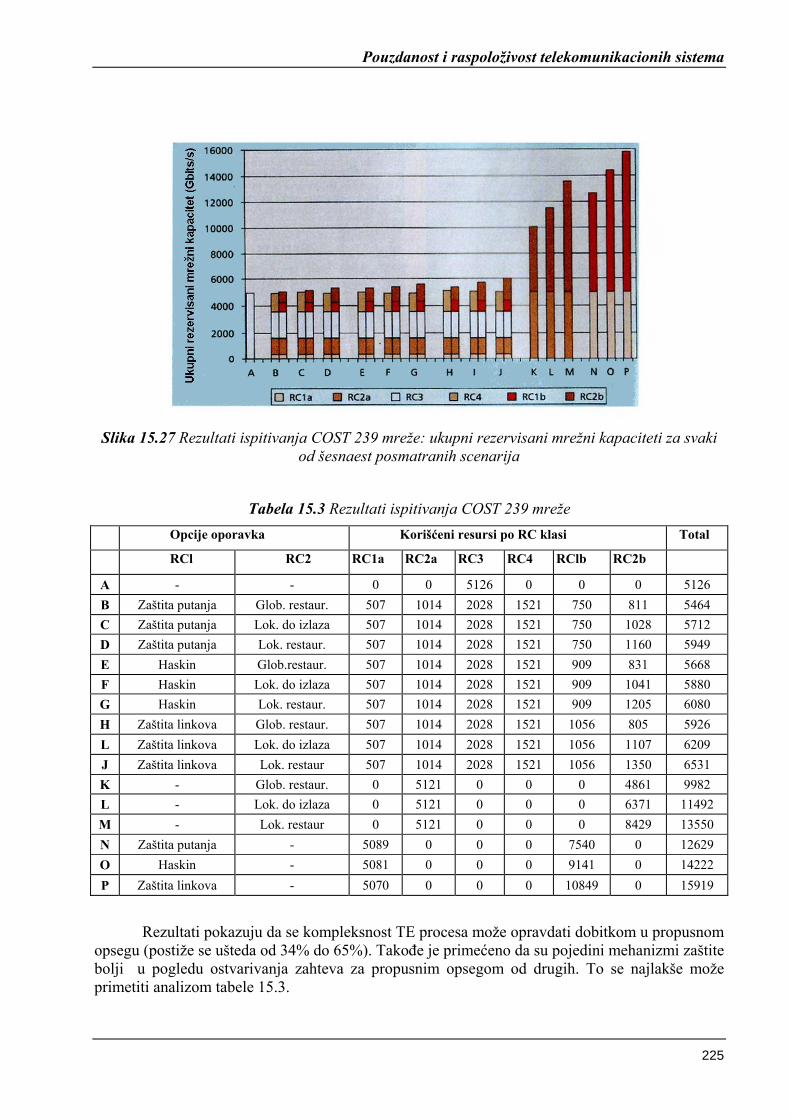
Pouzdanost i raspoloživost telekomunikacionih sistema
225
Slika 15.27 Rezultati ispitivanja COST 239 mreže: ukupni rezervisani mrežni kapaciteti za svaki
od šesnaest posmatranih scenarija
Tabela 15.3 Rezultati ispitivanja COST 239 mreže
Opcije oporavka Korišćeni resursi po RC klasi Total
RCl RC2 RC1a RC2a RC3 RC4 RClb RC2b
A - - 0 0 5126 0 0 0 5126 B Zaštita putanja Glob. restaur. 507 1014 2028 1521 750 811 5464 C Zaštita putanja Lok. do izlaza 507 1014 2028 1521 750 1028 5712 D Zaštita putanja Lok. restaur. 507 1014 2028 1521 750 1160 5949 E Haskin Glob.restaur. 507 1014 2028 1521 909 831 5668 F Haskin Lok. do izlaza 507 1014 2028 1521 909 1041 5880 G Haskin Lok. restaur. 507 1014 2028 1521 909 1205 6080 H Zaštita linkova Glob. restaur. 507 1014 2028 1521 1056 805 5926 L Zaštita linkova Lok. do izlaza 507 1014 2028 1521 1056 1107 6209 J Zaštita linkova Lok. restaur 507 1014 2028 1521 1056 1350 6531 K - Glob. restaur. 0 5121 0 0 0 4861 9982 L - Lok. do izlaza 0 5121 0 0 0 6371 11492 M - Lok. restaur 0 5121 0 0 0 8429 13550 N Zaštita putanja - 5089 0 0 0 7540 0 12629 O Haskin - 5081 0 0 0 9141 0 14222 P Zaštita linkova - 5070 0 0 0 10849 0 15919
Rezultati pokazuju da se kompleksnost TE procesa može opravdati dobitkom u propusnom
opsegu (postiže se ušteda od 34% do 65%). Takođe je primećeno da su pojedini mehanizmi zaštite bolji u pogledu ostvarivanja zahteva za propusnim opsegom od drugih. To se najlakše može primetiti analizom tabele 15.3.

Pouzdanost i raspoloživost telekomunikacionih sistema
226
15.4. Uticaj kvarova na mreže sa bežičnim pristupom
15.4.1. Uvodna razmatranja
Usled povećanja potreba za mobilnim komunikacijama došlo je do porasta i razvoja bežičnih mreža. Od više tipova bežičnih mreža, mobilne ćelijske i PSC mreže (Phone/Personal Communications Services- PSC) predstavljaju sektor sa najbržim rastom i trenutno daju akcenat na mobilne servise podataka (Mobile Data Service) [20]. Sa apekta pouzdanosti servisa, korisnici bežičnih mreža će vremenom zahtevati istu pouzdanost kao kod današnjih mreža sa fiksnim pristupom.
Strategije koje obezbeđuju preživljuvost mreža sa bežičnim prisrupom moraju biti dizajnirane na poseban način da se bore i sa prostornim i sa zemaljskim problemima. Preživljivost mreže se koristi da opiše raspoložive performanse mreže nakon nekog kvara. Idealna osobina preživljivosti mreža podrazumeva da je kvar neprimetan za korisnika i da se obezbedi kontinuitet u pružanju servisa. Postoje različiti parametri koji nastaju kao rezultat merenja preživljivosti mreža: verovatnoća blokiranja poziva i procenat poziva koji su ponovo uspostavljeni nakon kvara.
Uobičajna arhitektura mreža sa bežičnim pristupom druge generacije (2G) mobilnih komunikacija je prikazana na slici 15.28. Na njoj je prikazano ono što je tipično za današnje ćelijske/PSC mrže [20].
Slika 15.28 Tipična ćelijska / PCS mreža sa osnovnim elementima

Pouzdanost i raspoloživost telekomunikacionih sistema
227
15.4.2. Osnovni model za projektovanje preživljivih mreža sa bežičnim pristupom
Da bi mreža imala epitet preživljive moraju postojati alternativne rute između mrežnih komponenata sa odgovarajućim mehanizmima restauracije transporta ili moraju postojati inteligentne rezrvne komponente. Mreže sa bežičnim pristupom se moraju ″nositi″ sa problemom korisničke mobilnosti, održanjem snage u mobilnim stanicama, sigurnošću, lošim kvalitetom radio linkova i ograničenim frekvencijskim spektrom u kanalu da bi bile imune na kvarove. Pitanja preživljivosti naročito moraju uzeti u obzir korisničku mobilnost, koja može značajno da degradira performanse mreže kada se desi kvar. Tehnike za preživljivost koje se koriste u žičnim mrežama ne mogu biti primenjene u mrežama sa bežičnim pristupom. Zato je razvijen okvir za preživljivost koji predstavlja određene smernice u celokupnom postupku dizajna i analize takvih mreža [6]. Okvir predstavlja tri nivoa sa raznim strategijama preživljivosti u svakom nivou. Svaki od ovih nivoa karakterizuje određena mrežna funkcija, komponente i komunikacioni linkovi. To se može videti u tabeli 15.4.
Tabela 15.4 Nivoi preživljivosti mreža sa bežičnim pristupom
Nivo Komponente Komunikacioni linkovi Funkcije
Pristupni radio nivo Mobilne jedinice, bazne stanice (BS)
Digitalni radio kanali sa TDMA, FDMA ili CDMA
Definisanje fizičkog interfejsa za radio
komunikaciju
Linkni pristupni nivo Bazne stanice, kontroleri baznih stanica (BSC)
Zičani linkovi i/ili zemaljski mikrotalasni linkovi
Upravljanje klasterima BS, upravljanje radio kanalima
Transportni Bazne stanice, kontroleri
baznih stanica, mobilni centri za prebacivanje (MSC)
Žičani linkovi i/ili zemaljski mikrotalasni, SS7 žičani
linkovi
Upravljanje pozivima/konekcijama, upravljanje mobilnošću
Inteligentni MSC, HLR, VLR, EIR,
AUC, signalizaciona mreža
Zičani linkovi i/ili zemaljski mikrotalasni, SS7 žičani
linkovi
Upravljanje servisima, upravljanje mobilnošću
U tabeli 15.5 se vide sve moguće mere preživljivosti u zavisnosti od načina rada po nivoima i mogućim posledicama na servis:

Pouzdanost i raspoloživost telekomunikacionih sistema
228
Tabela 15.5 Tipični scenariji kvarova sa merama preživljivosti u svakom sloju
Nivo Scenario kvara Potencijalne posledice Moguće mere preživljivosti
Pristupni Gubitak BS-e
Parcijalni ili puni gubitak servisa u ćeliji, povećan
saobraćaj u ćelijam susednim sa kvarom
Verovatnoća blokiranja poziva, verovatnoća nasilnog
prekida veze
Transportni Gubitak linka između BSC i MSC
Parcijalni ili puni gubitak servisa u klasteru ćelija,
povećan saobraćaj u ćelijama koje su susedne sa onom gde
je nastao kvar
Verovatnoća blokiranja poziva, verovatnoća nasilnog
prekida veze, kašnjenje uspostavljanja veze,
kašnjenje prekida poziva, kašnjenje ažuriranja
Inteligentni Gubitak VLR Gubitak servisa roaming-a u području pokrivanja MSC-a
Gubitak korisničkog tereta (u Erlanzima), kašnjenje u
pristupu bazama podataka
Da bi se moglo videti područje koje je pogođeno kvaraom moraju se uzeti u obzir stacionarne performanse i performanse mreže u prelaznim uslovima, koji se javljaju nakon kvara. Za prelazne uslove je karakteristično da u tom periodu postoji povećanje zahteva za ponovno uspostavljanje veze od strane isključenih korisnika. Kod ovakvih mreža, korisnikova mobilnost pogoršava prelazne uslove dok se isključeni korisnik kreće i pokušava ponovo da uspostavi vezu koja je pukla zbog nekog kvara.
15.4.3. Analiza preživljivosti GSM mreža
Posmatrajmo jednu tipičnu GSM mrežu, čiji je primer dat na slici 4.2. Da bi se predstavila korisnikova mobilnost usvaja se model slučajne mobilnosti. U posmatranom slučaju generisane su dve vrste poziva:
• mobilno započeti pozivi (MOC-Mobile Originated Calls)
• mobilno prekinuti pozivi(MTC-Mobile Terminated Calls)
Petpostavimo da pozivi stižu sa Poisson-om raspodelom i da imaju vreme trajanja sa eksponencijalnom raspodelom.

Pouzdanost i raspoloživost telekomunikacionih sistema
229
Slika 15.29 Primer jedne GSM mreže
Mere koje se koriste da prikažu efekte kvarova u mreži su verovatnoća blokiranja MOC
poziva, verovatnoća blokiranja MTC poziva i srednje vreme ažuriranja lokacije za celo područje servisa MSC. Uzmimo da korisnik pokušava jednom da uspostavi prekinuti poziv. Kako broj neispravnih ćelija raste, dolazi do srazmernog povećanja blokiranih MOC i MTC poziva. To je i logično, zbog toga što je veći broj korisnika pogođen kvarom. Vrednost kašnjenja ažuriranja lokacije je veća u slučaju kvarova nego u slučaju bez kvarova. Međutim, kašnjenje ažuriranja lokacije za kvarove na linkovima između BSC i MSC je manje nego nego u slučaju kvara nekoliko ćelija. Ovo je zbog toga što je broj VLR zahteva u slučaju kvara linka manji nego u drugom slučaju.
Na osnovu posmatranja mnogih scenarija kvarova, izvedeni su sledeći zaključci:
• Odmah nakon kvara mreže povećava se verovatnoća blokiranja poziva, iz tog razloga što oni korisnici čiji su pozivi bili prerano prekinuti pokušavaju ponovo da uspostve veze što izaziva nagomilavanje saobraćaja.
• Kvarovi odvojenih ćelija imaju gore efekte nego kvarovi klastera ili susednih ćelija.
• Kvarovi ćelija koji se ne nalaze na ivicama lokacionih područja (LA) je gore nego kvarovi koji se nalaze na ivicama LA.
• Kretanje korisnika je takođe veoma važno. Npr. determinisano kretanje je gore nego slučajno kretanje.
• Važno je i ponašanje korisnika. U ovom slučaju korisnik samo jednom pokušava da uspostavi vezu nakon prekida usled kvara, dok u realnom slučaju taj broj je veći

Pouzdanost i raspoloživost telekomunikacionih sistema
230
Tehnike mrežne preživljivosti se mogu razvrstati u svakom nivou za specifične scenarije kvarova. Primeri koji se tipovi strategija preživljivosti mogu koristiti na pojedinim nivoima mreže su prikazane u tabeli 15.6.
Tabela 15.6 Uobičajne strategije preživljivosti u svim slojevima ćelijskih mreža
Nivo Robustnost i redunđansa Restauracija saobraćaja
Nivo radio pristupa Rezerve radiofrekvencijskih komponenata, preklapajuće/skalabilne ćelije
Protokoli zadeljenje opterećenja, dinamička atokacija kanala, protokoli
sa adaptivnim kvalitetom kanala
Nivo pristupa linku Rezervni link izmedu BS i BSC, visestruko
navođenje BS prema BSC, prstenasta topologija za veze između BS iBSC
Automatsko zaštitno prebacivanje, dinamički protokoli
rerutiranja, prstenovi koji samostalno ispravljaju kvarove
Transportni Rezervni linkovi između BSC i MSC, prstenasta
topologija za veze BSC i MSC, višestruko navođenje BSC prema MSC
Automatsko zaštitno prebacivanje, prstenovi koji samostalno ispravljaju
kvarove, dinamičko rerutiranje
Inteligentni Fizička raznolikost (diversity) u signalizacionim linkovima, fizička raznolikost baza podataka
Dinamičko rerutiranje, protokoli za proveru (checkpoint protocols)
U pristupnom radio nivou ozbiljan kvar je kvar bežičnog linka ka korisniku. Zbog
prepreke u vidu ograničenog spektra, moguć pristup tom problemu je dizajn mreže sa arhitekturom preklapajućih ćelija. Takva arhitektira sistema je prikazana na slici 15.30(a). Svaka bazna stanica podržava dve grupe radio kanala, kratkodometne (short-haul) i dugodometne (long-haul) kanale. Svaki mobilni terminal može pristupiti ili dugodometnim kanalima od bar dve bazne stanice ili kratkodometnim kanalima od iste bazne stanice. Prema tome, veće preklapanje obezbeđuje više pristupnih kanala za svaki mobilni terminal ali takodje povećava međukanalnu intreferenciju.
Na nivou pristupa linku i transportnom nivou glavna briga su kvarovi komponenata/linkova površinskog dela mreže. Ovde se primenjuju tradicionalne strategije preživljivosti mreža uz određene promene. Npr. na nivou pristupa linku sve bazne stanice u klasteru sa odgovarajućim BSC se mogu povezati u prsten koji ima osobinu samostalnog ispravljanja kvarova. Slično tome, na transportnom nivou se može prihvatiti arhitektura paučinastog tipa sa najmanje dvostrukim navođenjem u čvorovima između BSC i MSC i sa odgovarajućim restauracionim protokolima saobraćaja. Primer takve strukture je dat na slici 15.30(b).

Pouzdanost i raspoloživost telekomunikacionih sistema
231
Slika 15.30 (a) Arhitektura mreže sa preklapajućim ćelijama (b) Prstenasta arhitektura za
transportni nivo
Strategija preživljivivosti u inteligentnom nivou, kao što je fizička raznolikost baza podataka (HLR i VLR registri), zajedno sa protokolima za proveru mogu obezbediti imunost na kvarove.
Zbog kompleksnosti mrežne arhitekture i jedinstvenih karakteristika mreža sa bežičnim pristupom nije moguće generalizovati jedinstvenu tehniku koja će se boriti protiv raznih kvarova. Baš zato su i potrebne prethodno razmatrane višestruke strategije preživljivosti mreža.
15.5. UMTS: projektovanje pouzdane mreže za pristup
UMTS pripada trećoj generaciji mobilnih mreža i zamišljena je kao naslednik GSM. UMTS mreže se sastoje od tri međusobno zavisna domena: jezgro mreže (Core Network- CN), UMTS kopneni deo mreže sa radio pristupom (UMTS Terrestrial Radio Access Network- UTRAN) i korisničke opreme (User Equipment- UE). Detaljna blok šema celokupne UMTS mreže je data na slici 15.31 [17].

Pouzdanost i raspoloživost telekomunikacionih sistema
232
Slika 15.31 UMTS mreža
UTRAN mreže se sastoje od od dva tipa mrežnih elemenata: RBS-ova (Radio Base Station), na slici 15.31 označen sa Node B i kontrolne opreme za RBS-ove koji se nazivaju RNC-ovi (Radio Network Controller). Pojednostavljena verzija slike 15.41 je data na slici 15.32 na kojoj je prikazana topologija pristupne mreže samo sa elementima koji su nama od interesa, RBS i RNC.
Slika 15.32 Osnovni elementi pristupne UTRAN mreže

Pouzdanost i raspoloživost telekomunikacionih sistema
233
U prvoj fazi projektovanja, potrebno je pronaći optimalno stablo RBS-ova za prethodno definisani RNC uzimajući u obzir pouzdanost takve strukture. U drugoj fazi, pouzdanost mreže se povećava tako što se uvode novi linkovi, kojima se premoštavaju delovi meže koji su osetljivi na kvarove.
Jedan od bitnijih parametara pri projektovanju mreža je parametar raspoloživisti. Komponente modela UTRAN mreže: oprema, interfejs i link su prikazani na slici 15.33. U slučaju opreme i interfejsa, parametar raspoloživosti zavisi od procesiranja podataka ili kapaciteta transmisije podataka, dok u slučaju linka ta vrednost je određena sa dva parametra, dužina i lokacija. Između RNC-a i RBS-a definišu se putanje, čija se raspoloživost računa kao raspoloživost svih elemenata koji joj pripadaju. Raspoloživost RBS-a će biti ukupna raspoloživost svih putanja, jedna standardna i više rezervnih, koje mu pripadaju.
Slika 15.33 Komponente modela URAN mreže: oprema, interfejs i link
Zahtevi transporta za dva RBS-a mogu biti potpuno različiti uz istu raspoloživost, i zato se koristi parametar gubitaka saobraćaja (L) L=(1-A)*T, gde je A raspoloživost, a T je saobraćajni zahtev za posmatrani RBS.
Ako je poznat očekivani srednji gubitak saobraćaja Llim, koristeći odgovarajuću funkciju može se opisati ″nepouzdanost″ svakog RBS-a. Izračunavajući sumu vrednosti funkcija dobija se vrednost za w, koja opisuje koliko trenutna pouzdanost sistema odstupa od zahtevnog nivoa pouzdanosti. Na osnovu vrednosti w možemo da izračunamo takozvanu cenu pouzdanosti (Cpen). U posmatranom slučaju se kao funkcija koristi kvadratna funkcija na slici 15.34.
Slika 15.34 Kvadratna funkcija koja se koristi za izračunavanje w

Pouzdanost i raspoloživost telekomunikacionih sistema
234
15.5.1. PTA algoritam
Nakon definisanja odgovarajuće funkcije cene ukupne mreže, radi se algoritam usavršavanja stabla ili PTA algoritam (Penalty-Tree Algorithm). Ukupna cena tekuće topologije Ctotal je linearna kombinacija fizičkih i virtuelnih troškova i data je formulom:
Ctotal=β*Cpen + (1-β)*Ctop (15.1)
Podešavanjem veličine β može se namestiti da PTA algoritam posvećuje više pažnje pouzdanosti.
Sa rastom parametra β rastu i troškovi vezani za pouzdanost i oni postaju prioritetni u odnosu na strukturne troškove. Ukoliko parametar β čini cenu vezanu za pouzdanost toliko dominantnom, topologija stabla počinje da se transformiše u topologiju zvezde.
15.5.2. Algoritmi za povećavanje pouzdanosti
U ovim algoritmima se vrši povećavanja pouzdanosti mreža ubacivanjem dodatnih linkova. Kao ulazna veličina postoji ograničenje u vidu parametra Llim i mrežnu topologiju stabla koja se mora proširiti. Kao izlazna veličina se generiše mrežna topologija sa garantovanom vrednošću srednjeg gubitka saobraćaja Llim.
Određene pretpostavke o mreži na kojoj se vrši optimizacija su:
• pretpostavlja se scenario pojedinačnog kvara
• bilo koja rezervna putanja RBS-a nije duža od jednog koraka od njegove standardne putanje
• pretpostavlja se da je stepen nekih RBS-ova u pristupnoj mreži manji nego što je dato stepeno ograničenje, u suprotnom ne bi mogli ubaciti nove linkove
• novi dodatni rezervni linkovi ne smeju nositi nikakav dodatni saobraćaj sem onog koji je predviđen u slučaju kvarova.
Korišćenje strategije sa zajedničkom zaštitom je ilustrovano na slici 15.35. zaštićen je saobraćaj koji potiče od RBS-ova i i j,dodavnjem novog linka između njih. Pošto su standardne putanje prostorno razdvojene, u slučaju pojedinačnog kvara samo jedna putanja može biti prekinuta i data rezervni link mora da podnese maksimum kao što je prikazano na slici.

Pouzdanost i raspoloživost telekomunikacionih sistema
235
Slika 15.35 Strategija sa zajedničkom zaštitom
15.5.2.1. GRE algoritam
GRE (Greedz Reliability Enhacement) je baziran na pretpostavci da su RBS-ovi prvog nivoa najosetljiviji na kvarove. Zbog toga rezervni linkovi se dodaju RBS-ovima prvog nivoa na isti način kao što je objašnjeno na slici 5.5. Zbog ograničene mogućnosti povećanja pouzdanosti ovaj metod je veoma brz, ali neefikasan i koristi se samo kao teorijski primer.
15.5.2.2. RRE algoritam
RRE (Randomized Realiability Enhacement) agoritam nije ograničen samo na zaštitu čvora prvog nivoa kao prethodni algoritam i sastoji se od nekoliko koraka:
• Prvo odvajaju se RBS-ovi koje treba zaštititi (koje je izvedeno iz parametra Llim)
• Bira se jedan RBS iz grupe na osnovu slučajne funkcije koja pretstavlja saobraćajne gubitke. Što RBS ima veći gubitak saobraćaja to je veća verovatnoća da će on biti izabran.
• Bira se odgovarajući sused RBS prethodno izabranom RBS-u i ubacuje se novi link između njih. Odluka o izboru suseda se bira na osnovu formule:
(1 )mera C A vLλ μ= ⋅Δ + − Δ + (15.2)
U formuli ΔC i ΔA predstavljaju promene cene i raspoloživosti, respektivno, zbog linka koji je kreiran prema susedu, a veličina L je dužina standardne putanje do suseda. Parametri λ , μ i v su konstante koje se koriste da bi se pronašao kompromis između tri objekta.
• Na standardnoj putanji suseda, ako je to potrebno, vrši se inkrementiranje kapaciteta linkova, pošto u sluičaju kvara ta putanja mora biti u mogućnosti da izdrži preusmereni sobraćaj.

Pouzdanost i raspoloživost telekomunikacionih sistema
236
• Na kraju, pamti se nova rezervisana putanja u zaštićenom RBS-u i u svojoj deci RBS-ovima koji mu pripadaju (po definiciji, RBS je dete RBS-u i ako standardna putanja iz j ide preko i).
Ovi koraci se ponavljaju sve dok u prvom koraku ne postoji nijedan RBS koji se mora zaštititi.
Na slici 15.36 su demonstrirani koraci RRE algoritma na jednostavnoj mreži koja sadrži 6 RBS-ova. U prvoj fazi se odvajaju RBS-ovi b,c i e (označeni crvenom) zbog toga što su oni najosetljiviji sa tačke gledišta pouzdanosti. Uzmimo prvo RBS e da zaštitimo, a RBS d je jedini sused koji ispunjava nametnute zahteve. U fazi dva se ubacuje novi link i povećava se kapacitet linka između d i f, shodno novim zahtevima. U trećoj fazi dodeljuju se RBS-u e rezervne putanje kao i negovoj nezaštićenoj deci, čvorovima b i c. U sledećoj fazi (faza 4a) ponovo se izračunavaju raspoloživosti svakog RBS-a i pronalazi se da RBS b još uvek krši ograničenja gubitaka saobraćaja. Sada postoje dva moguća RBS-a prema kojima se može kreirati rezervni link, to su a i b. Bira se a na osnovu mere definisane sa formulom 15.2. Nakon uvođebnja novog linka u mrežu, vrši se inkrementacija kapaciteta linka duž standardne putanje RBS-a a. Pošto RBS b ima dve rezervne putanje na link između d i f, koji je zajednički za obe putanje, ne mora se vršiti inkrementacija kapaciteta.
Ukoliko se zameni redosled ubacivanja linkova (e, d) i (b, a), link (e, d) će biti potreban niži kapacitet i RBS b će imati samo jednu rezervnu putanju, to se vidi na slici 5.36(4a). Vidimo da se u drugom slučaju pronalazi rešenje sa nižom cenom.
Slika 15.36 Koraci RRE algoritma

Pouzdanost i raspoloživost telekomunikacionih sistema
237
15.6. Pouzdanost i raspoložovost složenih sistema komunikacija
Za uređaje i sisteme pouzdanost se postiže, pored brižljivog izbora pouzdanih elemenata od kojih je sastavljen, dobrom konstrukcijom, odnosno projektovanjem uređaja (sistema) pri čemu se elementi koji su po svojoj prirodi ili uslovima rada najmanje pouzdani udvoje (redunduju) i tako poveća ukupna pouzdanost sistema. Kod savremenih telekomunikacionih sistema pouzdanost je znatno poboljšana uvođenjem posebne opreme koja stalno nadgleda ispravnost funkcionisanja svih delova telekomunikacionog sistema ili mreže čime se značajno povećava njegova pouzdanost, a kroz značajno skraćivanje vremena za otklanjanje greške, višestruko povećava raspoloživost.
15.6.1. Inteziteti otkaza komponenata, modula, uređaja i kanala veza
Pri projektovanju telekomunikacionih sistema jedna od bitnijih stvari je poznavanje pouzdanosti celog sistema (mreže), kao i konfiguracije samog sistema, odnosno raspoloživost svakog bloka koji čini dati sistem.
15.6.2. Tipične vrednosti pouzdanosti za prenosne sisteme
U tabeli 15.7 date su raspoloživosti komunikacionih veza i uređaja.
Tabela 15.7 Raspoloživost komunikacionih veza
Uređaj Vrednost raspoloživosti
Optički kabl 0.999
Uređaj (na 200km) 0.9999 – 0.99999
Kabl i uređaj (na 200km) 0.999
Skok (propagacija ili uređaj-na 200km) 0.99999
Propagacija i uređaj sa zaštitom na 200km 0.9999
15.6.3. Pouzdanost i raspoloživost telefonske mreže
15.6.3.1. Raspoloživost usled otkaza
Uticaj otkaza u telekomunikacionoj mreži se ogleda kroz godišnju srednju neraspoloživost nekog elementa mreže. Otkazom se smatra stanje kada postojeći servis postaje delimično ili potpuno neupotrebljiv. Tabela 15.4. daje vreme trajanja i efekat uticaja otkaza (kroz broj degradiranih elemenata) za različite mrežne elemente. Godišnja srednja raspoloživost usled otkaza može se izračunati uz pomoć tabele 15.8. i formule 15.3:

Pouzdanost i raspoloživost telekomunikacionih sistema
238
U (%) = ( Ee / Et )( Le / 87.6 ) (15.3)
gde je Ee broj pretplatnika i neispravnih jedinica istog kao posledica otkaza, Et ukupan broj pretplatnika i identičnih jedinica u nekoj oblasti, Le vreme otkaza nekih događaja definisanih u tabeli 1 kao posledica Ee pretplatnika ili identičnih jedinica u nekoj posmatranoj oblasti. Količnik h u formuli 4.4 predstavlja težinski faktor raspoloživosti:
h = Ee / Et (15.4)
Efekat otkaza nekog dela mreže je određen ovom vrednošću.
Tabela 15.8 Definicija otkaza u PSTN
Trajanje događaja Broj degradiranih elemenata
Karakterizacija degradiranih mrežnih elemenata časova minuta Broj
pretplatnika Broj uređaja Broj linijskih sistema sa kanalom
Lokalna telefonska centrala >15 >1000 Tranzitna telefonska centrala >15 >100
Telegraf ili teleks centrala >100 Lokalni pretplatnički kabl >12 >500
Lokalni kabl izmedju centrala >12 >100 Međugradski kabl za prenos govome
učestanosti >12 >50
Medjugradski otvoreni vod >12 >10
Kabl, uređaj ili link koji sadrži više od 50% kanala izmedju dva grada >2 >50%
Grupa kanala nekog višekanalnog kabla ili radio linka >2 >60
Grupa kanala nekog višekanalnog kabla ili radio linka, ukoliko predstavlja jedinu vezu
izmedju dva mala grada >2 >12
Otkaz telegrafskog kanala za tonske učestanosti za velike udaljenosti, uređaja i
radio linka >15 >1 VT
15.6.3.2. Servis raspoloživosti
Servis raspoloživosti podrazumeva srednju godišnju verovatnoću da korisnik servisa neće biti sprečen da razmenjuje informacije zbok tehničkog otkaza. ova verovatnoća sadrži i efekte otkaza koji su se desili u toku pristupa i korišćenja servisa.
Servis raspoloživosti se može proceniti na osnovu ukupnog vremena otkaza elemenata koji se koriste u nekoj vezi.

Pouzdanost i raspoloživost telekomunikacionih sistema
239
15.6.3.2.1. Telefonski servisi
Telefonske komutacione veze
Pokazatelji raspoloživosti za lokalne komutacione veze dati su u tabeli 15.9.
Korisnički aparati i korisničke linije su uračunati u proračun, ali nisu upisani u tabelu.
Tabela 15.9 Pokazatelj raspoloživosti lokalnih telefonskih komutacionih veza sa različitim brojem komutacionih uređaja
Broj centrala u vezi Pokazatelji
raspoloživosti (%) Lokalna veza
lokalne PABX koncentrator Korisnička linija
Lokalni
prenosnik Amin Ap
1 - - 2 - 97.45 98.65 1 - 1 2 1 97.10 98.35 1 - 2 2 2 96.85 98.05 2 - 1 2 2 96.70 98.10
2 - 2 2 3 96.40 97.80
1 1 - 1 1 98.38 99.10 1 1 1 1 2 98.10 98.80
U zemlji
Između glavnih stanica
Između lokalnih stanica i PABX
centrale
1 - - 2 - 95.8 98.4 1 - 1 2 1 95.5 98.1 1 - 2 2 2 95.2 97.8 2 - 1 2 2 95.1 97.9 2 - 2 2 3 94.8 97.6
1 1 - 1 1 97.6 99.0
1 1 1 1 2 97.3 98.7
U velikim
gradovim a:
Između glavnih stanica
Izmedju lokalnih stanica i PABX
centrale
- 1 - - - 99.8 99.86
Između stanica PABX

Pouzdanost i raspoloživost telekomunikacionih sistema
240
Pokazatelji raspoloživosti za tranzitne veze između pretplatnika dati su u tabeli 15.10.
Tabela 15.10 Pokazatelji raspoloživosti međumesnih komutacionih veza sa različitim brojem komutacionih uređaja
Broj centrala u vezi Pokazatelji raspoloživosti (%) Veza izmedju
pretplatnika koji se nalaze: Primarnih Sekundarni
h Tercijarni hBroj kanala
Amin Ap
U istoj primarnoj oblasti 1 - - 2 97.6 98.6
U istoj sekundarnoj
oblasti
1 2
1 1
- -
3 4
97.5 96.7
98.5 98.0
U istoj tercijarnoj oblasti
2 2
1 2
1 1
5 6
96.3 95.9
97.7 97.4
U različitoj tercijamoj
oblasti
2 - 1 2
- 2 2 2
2 2 2 2
5 5 6 7
96.9 96.5 96.0 95.5
97.7 97.7 97.4 97.1
Od glavnog ka okolnim sa
velikom gustinom naseljenosti
- - 1 1 95.9 97.9
Od glavnog ka primarnoj oblasti 1 - 1 2 95.4 97.4
Od glavnog ka sekundarnoj
oblasti - 1 1 2 95.5 97.4
Od glavnog ka primarnoj preko
sekundarne 1 1 1 3 95.2 97.1
Od glavnog ka tercijernoj
oblasti 1 1 2 1 95.1 97.0

Pouzdanost i raspoloživost telekomunikacionih sistema
241
Direktne veze
Pokazatelji raspoloživosti direktnih veza predstavljeni su tabelom 15.11.
Tabela 15.11 Pokazatelji raspoloživosti direktnih veza
Veza koja se sastoji od kanala
Pokazatelji raspoloživosti (%)
Veza
Dužina u km komada Dužina u
km komada Amin Ap
4 1 - - 99.0 99.5
8 2 - - 98.0 99.0 Lokalna u unutrašnjosti
12 3 - - 97.0 98.5
4 1 - - 98.2 98.4
8 2 - - 96.4 98.8
14 3 - - 95.8 98.4
Lokalna u većim
gradovima
20 3 - - 95.2 98.0
8 2 30-280 1 97.9 98.9
8 2 400 2 97.7 98.8 Međugradska u unutrašnjosti
8 2 600 3 97.5 98.7
8 2 30-280 1 97.1 98.8
8 2 400 2 96.9 98.7 Međugradska
u većim gradovima
8 2 600 3 96.7 98.6
15.6.4. Granične vrednosti za raspoloživost i pouzdanost sistema
Pri određivanju pokazatelja raspoloživosti, potrebno je postaviti granične vrednosti vremena otkaza za različite elemente i njihove karkteristike, i sistemski ih nadgledati kako bi se raspoloživost držala u odgovarajućim granicama.
Granične vrednosti za elemente se definišu kroz godišnje vreme otkaza i godišnji intenzitet otkaza. obe granične vrednosti imaju po dva pokazatelja:
• L godišnje akumulirano vreme otkaza (čas/godina)
• Lm maksimalno dozvoljeno godišnje akumulirano vreme otkaza za neki element, maksimalno 4 godišnje (čas/godina)

Pouzdanost i raspoloživost telekomunikacionih sistema
242
• P godišnji srednji intenzitet otkaza
• Pm maksimalni dozvoljeni godišnji intenzitet otkaza za neki retki element, maksimalno 4 godišnje
Granične vrednosti za sisteme napajanja, prenosne linijske sisteme i radio veze prikazane su u tabeli 15.12.
Tabela 15.12 Granične vrednosti godišnjeg vremena otkaza i intenziteta otkaza redundantnih sistema koji se koriste u PST
Godišnje vrednosti
Vreme otkaza u časovima Intenzitet otkaza u otkazima godišnje Naziv sistema
L Lm P Pm
Sistem za napajanje 0.3 1 0.3 1
Analogni linijski sistem 3 6 0.5 2
Digitalni linijski sistem 1.5 3 0.2 1
Radio link sa N+1 rezervom 3 6 0.2 2
Analogni linijski sistem 3 6 0.5 2
Digitalni linijski sistem 1.5 3 02 1

Pouzdanost i raspoloživost telekomunikacionih sistema
243
15.6.5. Granične vrednosti za mrežne elemente
15.6.5.1. Grupa kanala i kanal
Granične vrednosti za grupu linija i multipleksera, za grupu i pojedinačne kanale, date su u tabeli 15.13. Granične vrednosti se odnose i na analogne i na digitalne grupe kanala.
Tabela 15.13 Granične vrednosti godišnjeg vremena otkaza i intenziteta okaza za grupu
kanala i kanale
Godišnje vrednosti
Vreme otkaza u časovima Intenzitet otkaza u otkazima godišnje Naziv veze
L Lm P Pm
Grupa kanala od sekundarne ka višoj centrali za
dužine od 100 km
1 3 1.4 3.0
Grupa kanala od primarne ka sekundarnoj
centrali
0.7 2.0 1 2.1
Grupa kanala u ruralnoj mreži 0.5 1.5 0.6 2.0
Grupa kanala između lokalnih
centrala 1.5 3.5 0.3 0.7
Kanal od sekundarne ka višoj centrali
4 8 5 10
Kanal od primarne ka sekundarnoj
centrali 2.8 5.6 3.5 7
Kanal od lokalne ka primarnoj
centrali 1.8 3.6 2 5
Udaljeni kanal sa rezervom i ručnim
prebacivanjem 1 2 5 8
Nacionalni udaljeni kanal bez
rezerve 6 14 8 13
Međunarodni udaljeni kanal bez
rezerve 18 42 24 39

Pouzdanost i raspoloživost telekomunikacionih sistema
244
15.6.5.2. Uređaji linijskih prenosnih sistema
Granične vrednosti za uređaje stanica radio veza date su u tabeli 15.14.
Tabela 15.14 Granične vrednosti godišnjeg vremena otkaza i intenziteta otkaza za uređaje radio veze
Godišnje vrednosti
Vreme otkaza u časovima Intenzitet otkaza u otkazima godišnje Naziv uređaja
L Lm P Pm
Antena sa konektorom 3 6 0.06 0.1
Prebacivač 3 6 0.06 0.1 Modulator 3 6 0.16 0.3
Demodulator 3 6 0.16 0.3 Predajnik 3 6 0.56 0.7 Priiemnik 3 6 0.1 0.2
Jedinice napajanja u modulu 1 3 0.1 0.2
Granične vrednosti za analogne i digitalne uređaje u repetitorskim stanicama date su u tabeli 15.15.

Pouzdanost i raspoloživost telekomunikacionih sistema
245
Tabela 15.15 Granične vrednosti godišnjeg vremena otkaza i intenziteta otkaza za uređaje kablovskih linijskih sistema
Godišnje vrednosti
Vreme otkaza u časovima Intenzitet otkaza u otkazima godišnje
Linijski repetitori i linijski terminali u
stanici
L Lm P Pm
Za analogni 12 kanalni sistem 1 2 0.08 0.12
Za analogni 60 kanalni sistem 1 2 0.04 0.07
Za analogni 120-480 kanalni sistem 1 2 0.02 0.03
Za analogni 960-2700 kanalni
sistem 1 2 0.001 0.004
Za PCM 30 kanalni sistem 1 2 0.0015 0.003
Za PCM 120 kanalni sistem 1 2 0.0025 0.005
Za PCM 480 kanalni sistem 1 2 0.003 0.006
Za analogni 12 kanalni sistem 2 4.5 0.05 0.12
Za analogni 60 kanalni sistem 2 4.5 0.04 0.06
Za analogni 120-480 kanalni
sistem 2 4.5 0.01 0.03
Za analogni 960-2700 kanalni
sistem 2 4.5 0.001 0.004
Za PCM 30 kanalni sistem 2 4.5 0.0005 0.001
Za PCM 120 kanalni sistem 2 4.5 0.0008 0.002
Za PCM 480 kanalni sistem 2 4.5 0.001 0.003

Pouzdanost i raspoloživost telekomunikacionih sistema
246
15.6.5.3. Multipleksni i pomoćni uređaji za terminale
Granične vrednosti godišnjeg vremena otkaza i inteziteta otkaza za digitalne multipleksne uređaje su prikazane u tabeli 15.16.
Tabela 15.16 Granične vrednosti godišnjeg vremena otkaza i intenziteta otkaza za za digitalne multipleksne uređaje
Godišnje vrednosti
Vreme otkaza u časovima Intenzitet otkaza u otkazima godišnje Naziv uređaja
L Lm P Pm
1/30 kanalski podmodul 0.3 1 0.4 0.8
1/30 signalni konvertorski
podmodul 0.3 1 0.4 0.8
30/120 ili 120/480 multipleksni podmodul
0.5 1 0.6 1
15.6.6. Uputstva za raspodelu osnovnih resursa u zavisnosti od ulaganja
U svrhu produženja radnog veka parametara sistema, potrebno je izvršiti planiranje raspoloživosti i određeno ulaganje. U daljem teskstu se navode osnovna uputstva koja bi obezbedila zadovoljavajuću raspoloživost , a da pritom budu usaglašeni prethodno navedeni standardi.
15.6.6.1. Napajanje
Sistem napajanja se sastoji od baterije nominalnog napona 48V DC i od uređaja za punjenje koji je povezan na mrežno napajanje.
Jedinice napajanja u modulima i ramovima, koje napajaju prenosne sisteme, moraju biti udvojene i napajane sa različitim osiguračima, ukoliko njihovi otkazi remete više od 300 pretplatnika ili veza. Problem se može rešiti raspodelom sekundarnih jedinica napajanja u isti ili drugi modul, ali je tada veoma važno voditi računa da jedinice ostanu u radnom stanju da ne bi došlo do smanjenja perioda eksploatacije.

Pouzdanost i raspoloživost telekomunikacionih sistema
247
15.6.6.2. Linijski sistemi
Analogni linijski sistemi Za kablovski linijski sistem ili linijski sistem radio veza najmanje 300-kanalnog sistema
udaljene mreže, planira se rezervni 15-supergrupni blok ili supergrupna veza.
Digitalni linijski sistem Za minimalno tercijarni digitalni sistem mora postojati rezervni linijski sistem na drugoj
trasi i moraju biti ispunjeni sledeći uslovi:
• zastupljenost digitalnih linijskih sistema u mreži treba da bude najmanje 30%
• obezbeđivanje zatvorenih digitalnih petlji u mreži
15.6.6.3. Prenosne deonice
Sekundarne i tercijarne centrale moraju biti spojene sa najmanje dva linijska sistema na različitim trasama. U linijskom sistemu se mora obezbediti da njmanje 60 do 70 % deonica osiguraju skraćivanje trase.
15.6.6.4. Klase kanala u zavisnosti od raspoloživosti
Klasifikacija kanala u zavisnosti od korišćenja rezervi može se obaviti na sledeći način:
• Kanal I klase radi praktično bez otkaza.
• Kanal II klase obnavlja se rezervnim kanalom 15 minuta nakon otkaza.
• Kanal III klase ne zahteva rezervu pri otkazu
15.6.6.5. Raspored mreža
Lokalna mreža Za pretplatničke linije se planira kabl sa polietilenskim punjenjem, radi smanjenja
verovatnoće otkaza izolacije usled propuštanja vode kroz nju.
Koriste se kanali za spajanje lokalnih i udaljenih centrala, PCM sistemi ili optički kablovi.
Ruralna mreža
Mogu se planirati vazdušni, optički (za velike snage) i bakarni kablovi u zavisnosti od stanja na trasi.

Pouzdanost i raspoloživost telekomunikacionih sistema
248
Mreža širokopojasnih veza između centrala Za ovu vrstu mreža se ne planira otvoren vod ili vazdušni kabl. Proračun rezervne linije za
digitalni prenos se dobija analizom rada propisanog broja PCM sistema.
15.6.6.6. Centrale
Analogne lokalne i PABX centrale Koriste se kanali III klase.Uvođenje alternativne trase je pogodno kod centrala koje su
sposobne da povećaju raspoloživost.
Digitalne lokalne centrale Broj komutatora svake centrale se planira na osnovu očekivanog i od prognoziranog
saobraćaja od 6000 Erlanga ± 20%.

Literatura
249
LITERATURA
[1°] N. Vujanović, "Teorija pouzdanosti tehničkih sistema", Vojnotehnički i novinski centar, Beograd, 1990.
[2°] J. Perić, M. Jevtić, V. Stojanović, "Analiza pouzdanosti", Savremena administracija, Beograd, 1979.
[3°] I.A. Ušakova, "Hadježnost tehničeskih sistem", Radio Svjaz, Moskva, 1985. [4°] J.R. Clymer, "Systems Analysis Using Simulation and Markov Models", Prentice-
Hill, New York, 1990. [5°] R. M. Ramović, "Komponente telekomunikacionih uređaja", Školski PTT centar, Viša
tehnička PTT škola, Beograd, 2000. god. [6°] D. Tjapkin, S. Širbegović, S. Ristić, R. Ramović, "Komponente i konstruisanje
elektronskih uređaja", Nauka, Beograd, 1992. [7°] R. Ramović, "Pouzdanost i raspoloživost telekomunikacionih sistema", skripta, ETF
Beograd, 2000. [8°] R. Ramović, V. Milanović, "Elementi konstruisanja uređaja", skripta, ETF Beograd,
2004. [9°] M. Lj. Janković, Z. R. Petrović, "Mreže za pristup", Akademska misao, ETF Beograd,
2004. [10°] V. Ferretti, D. Schlenke "Reliability of telecomunnication Systems", Siemens,
Aktiengesslschaft, 1993. [11°] D. Siewiorek, R. Swarz, "Reliable Computer Systems", Design and Evaluation,
Digital Press, 2000. [12°] S. Pokorni, R. Ramović, N. Parčina, "Teorija pouzdanosti tehničkih sistema -zbirka
rešenih zadataka", Centar vojnih škola VJ., VAVJ, Beograd, 1997. [13°] K. Beljajev, V.A. Bagatirev, V.V. Bolotin, "Nadežnost tehničeskih sistem -
spravodnik", Radio Svjaz, Moskva, 1985. [14°] M. Vujošević, "Operaciona istraživanja", Fakultet organizacionih nauka, Beograd,
1999. [15°] M. Sladojević, Z. Uljarević, "Elementi ugradnje pouzdanosti u elektronske uređaje",
Elektronska industrija, Niš, 1987. [16°] "MIL-HDBK-217E, Reliability Prediction of Electronic Equipment", DoD, USA,
1986. [17°] R. Petrović, M. Vujošević, D. Petrović, "Optimizacija redundovanih sistema",
Saobraćajni fakultet, Beograd, 1993. [18°] S. Pokorni, "Pouzdanost i održavanje tehničkih sistema", Vojna akademija VJ,
Beograd, 2002. [19°] Lj. Papić editor, "Analiza stabla otkaza", Izdavački centar za upravljanje kvalitetom i
pouzdanošću – DQM, Čačak, 2004. [20°] R. Petrović, M. Vujošević, D. Petrović, "Optimizacija redundovanih sistema",
Saobraćajni fakultet, Beograd, 2003. [21°] www.amazon.com









![[1] mikromodel klasicna - nobel.etf.bg.ac.rsnobel.etf.bg.ac.rs/studiranje/kursevi/of3sf/materijali/2017_18... · Dve etape razvoja statističke fizike: ... veličina, ne zavise od](https://img.dokumen.tips/doc/110x75/5a78e9be7f8b9a70238e4f44/1-mikromodel-klasicna-nobeletfbgac-etape-razvoja-statisticke-fizike-.jpg)



















