Embed Size (px)
Citation preview

Research ArticleStudy on a Twice Transfer Alignment Based on Dual Model
Shuai Chen1 Runwu Zhong1 Xiaohui Liu23 and Ahmed Alsaedi4
1School of Automation Nanjing University of Science and Technology Nanjing 210094 China2Department of Computer Science Brunel University Uxbridge Middlesex UB8 3PH UK3Faculty of Engineering King Abdulaziz University Jeddah 21589 Saudi Arabia4Nonlinear Analysis and Applied Mathematics (NAAM) Research Group Department of Mathematics Faculty of ScienceKing Abdulaziz University Jeddah 21589 Saudi Arabia
Correspondence should be addressed to Shuai Chen c1492163com
Received 29 October 2014 Revised 11 December 2014 Accepted 28 December 2014
Academic Editor Zidong Wang
Copyright copy 2015 Shuai Chen et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper proposes a twice rapid transfer alignment algorithm based on dual models in order to solve the problems such aslong convergence time poor accuracy and heavy computation burden resulting from the traditional nonlinear error models Thequaternionmatching method based on quaternion error model along with the extended Kalman filter (EKF) is applied to deal withthe large misalignment in the first phase Then in the second transfer alignment phase velocity plus attitude matching method aswell as classical Kalman filter is adoptedThe simulation and the results of vehicle tests demonstrate that this method combines theadvantages of both nonlinear and linear error models with the guarantee of accuracy and fastness
1 Introduction
The technology of rapid transfer alignment for inertial navi-gation system with small attitude errors has been adequatelystudied in theoretical research and widely applied in engi-neering practice satisfying the requirements of rapidity andhigh degree of accuracy [1] However the model is highlydependent on the small misalignment angles assumptionand therefore is not applicable under the situation when theattitude errors become large In this case the traditional linearerrormodel cannot accurately describe the error propagationcharacteristics of the inertial navigation system which willinevitably degrade the performance of the filter and some-times even lead to instability and divergence Consequentlysome researchers studied the nonlinear error models [2ndash6]and proposed various kinds of nonlinear Kalman filters [7ndash11] However the state estimation of nonlinear error modelhas poor performance and a huge computing burden whichrequires a long time to converge Hence it cannot meet therequirements of stability and fastness
Obviously both of the two models have their own short-comings In this paper we aim to find a transfer alignmentalgorithm appropriate for arbitrary misalignment angles
which has the advantages of fast convergent rate and highaccuracy A twice transfer alignment algorithm based ondual models is proposed in this paper which combines theadvantages of both nonlinear and linear error models
(A) Model Based on Additive Quaternion The models arecomposed of the velocity error and the quaternion errorpropagationmodel where the state variables can be presentedas
119909 = [120575119902 120575V 120576 nabla] (1)
where 120575119902 = [1205751199021120575119902212057511990231205751199024] is the quaternion error
vector 120575V = [120575V119890 120575V119899 120575V119906] indicates velocity vector with
respect to Earth in the navigation frame 120576 = [120576119909120576119910120576119911]
and nabla = [nabla119909nabla119910nabla119911] are equivalent gyrodrift vector and
equivalent accelerometer bias vector respectively in the bodyframe
The quaternion is widely used as an effective methodto compute the attitude of INS (inertial navigation system)According to the relationship between quaternion errorsand tilt angle quaternion errors can be used to describe
Hindawi Publishing CorporationDiscrete Dynamics in Nature and SocietyVolume 2015 Article ID 943065 5 pageshttpdxdoiorg1011552015943065
2 Discrete Dynamics in Nature and Society
the attitude error The quaternion and velocity error differ-ential equation can be given as follows
120575 =
1
2
119872120575 119876 +
1
2
119880 (120576119887+119882119887
119892) minus
1
2
119884120575120596119899
119894119899
120575V119899 = minus2 [1006704119862119899119904
1006704119891119887] times 119884119879120575 119876 + 21006704119862
119899
119904
1006704119891119887119876119879120575 119876
minus 1198841198791198801006704119891119887+ 1006704119862119899
119904nabla119887minus (2120596
119899
119894119890+ 120596119899
119890119899) times 120575V119899
minus (2120596119899
119894119890+ 120596119899
119890119899) times V119899
(2)
where 120575 119876 is the quaternion error vector120596119899119894119899= [120596119864
120596119873
120596119880]
is the rotation rate of the navigation frame with respect tothe inertial frame defined in the navigation frame 120596119887
119894119887=
[120596119909120596119910120596119911] represents the rotational angular velocity of
SINS (Slave Inertial Navigation System) with respect to theinertial frame defined in the SINS body frame the matrices119880 119884 and119872 can be presented as follows
119880 =
[
[
[
[
[
[
minus1199021minus1199022minus1199023
1199020
minus1199023
1199022
1199023
1199020
minus1199021
minus1199022
1199021
1199020
]
]
]
]
]
]
119884 =
[
[
[
[
[
[
minus1199021minus1199022minus1199023
1199020
1199023
minus1199022
minus1199023
1199020
1199021
1199022
minus1199021
1199020
]
]
]
]
]
]
119872 =
[
[
[
[
[
[
0 120596119864minus 120596119909
120596119873minus 120596119910
120596119880minus 120596119911
120596119909minus 120596119864
0 120596119911+ 120596119880
minus120596119910minus 120596119873
120596119910minus 120596119873
minus120596119911minus 120596119880
0 120596119909+ 120596119864
120596119911minus 120596119880
120596119910+ 120596119873
minus120596119909minus 120596119864
0
]
]
]
]
]
]
(3)
1006704119862119899
119904is the indicated transformation matrix of SINS from the
body frame to the navigation frame 1006704119891119887 indicates specific
force of SINS in its body frame 120596119899119894119890is the rotation rate of
the Earth with respect to the inertial frame defined in thenavigation frame 120596119899
119890119899is the turn rotational angular velocity
of the navigation frame with respect to the Earth V119899 =
[V119890 V119899
V119906] indicates velocity vector of SINS with respect to
Earth in the navigation frame 119884119879119880 1006704119891119887 is the nonlinear term
in the equation of velocity error
(B) Model of Rapid Transfer Alignment This model waspresented by Kain and Cloutier in [1] The state variables arepresented as
119909 = [120593119899120575V119899 120576
119894nabla119894120582119894] (4)
where 120593 = [120593119909120593119910120593119911] is defined as the rotation vector
error between the true navigation frame 119899 and the indicated
navigation frame 1198991015840 If 120593 is sufficiently small the state
equation can be expressed as follows
120575119899= 119891119899times 120593119899minus (2120575120596
119899
119894119890+ 120575120596119899
119890119899) times 119881119899
minus (2120596119899
119894119890+ 120596119899
119890119899) times 120575119881
119899+ 119862119899
119887nabla119894
119899= minus120596119899
119894119899times 120593119899+ 120575120596119899
119894119899+ 119862119899
119887120576119894
120576119894= 0 nabla
119894= 0
120577119894= 0
(5)
where 120593119899 and 120575119881119899 are the attitude error and velocity error
vectors respectively 119881119899 indicates velocity vector in thenavigation frame119891119899 indicates specific force in the navigationframe 120596119899
119894119890is the Earth rate vector 120596119899
119890119899is the turn rate of
the navigation frame with respect to the Earth 119862119899119887is the
direction cosine matrix of SINS 120576119894and nabla
119894(119894 = 119909 119910 119911) are
equivalent gyrodrift vector and equivalent accelerometer biasvector respectively in the body frame 120577
119894(119894 = 119909 119910 119911) is 3-axis
component of INS installation error angle vector in the bodyframe
(C) Transfer Alignment Based on Dual Model By a largeamount of simulation tests we find out that attitude errorcan quickly converge to small angles when the error modelbased on quaternion is used under the condition of largemisalignment angle However it still takes a long time toconverge to a satisfactory accuracy In this case we intend toswitch to the linear model to obtain faster convergence speedand higher accuracy This approach is called a twice transferalignment based on dual model This method uses nonlinearmodel in first phase Then after the estimation of attitudeerror converging to small angles the linear error model isadopted to complete the twice transfer alignment
2 Experimental Results
21 Simulation and Results The simulation is performedin two different cases In Case A model based quaternionand EKF which is easily realized in engineering project areadopted in the first phase Through analyzing the perfor-mance of the nonlinear system by simulation experimentsthe time point to switch to linear error model and classicalKalman filter in the next stage is decided at the 10th secondIn Case B model based additive quaternion and EKF areutilized The initial attitude errors in roll pitch and headingare all assumed to be 20∘ The total time of the simulation is60 s the initial position is set at 325 degrees north latitude135 degrees east longitude 500 meters height the initialattitudes are all set at 0∘ the initial north velocity is 50mseast and vertical velocities are 0ms The constant gyrodriftsand accelerometer biases are set at 10∘h 5mg respectivelyThe simulation results are shown in Figures 1-2 and Table 1
Figure 1 shows the alignment results in the first phaseThefigures indicate that the attitude estimation error gets wellinto the range of the ideal accuracy during the first 10 s Afterthe calibration is done the conventional transfer alignmentprocess will work well in the following 50 s
Figure 2 andTable 1 compare the attitude estimation errorin Case Awith that in Case B It is clear that the red curves not
Discrete Dynamics in Nature and Society 3
0 2 4 6 8 10
0
5
Time (s)
Pitch estimation error
Case A Case B
6 8 10
0
minus25
minus20
minus15
minus10
minus5
minus05
05
(∘)
(a)
0 2 4 6 8 10Time (s)
Roll estimation error
0
5
Case A Case B
minus20
minus15
minus10
minus5
minus02
minus04
02(∘)
0
6 8 10
(b)
Yaw estimation error
0 2 4 6 8 10
0
Time (s)
Case A Case B
6 8 10
minus25
minus20
minus15
minus10
minus5
minus06
minus08
minus1
(∘)
(c)
Figure 1 The attitude estimation error of first phase
Table 1 Alignment accuracy comparison
Estimated error of attitude (∘)Pitch Roll Yaw
Case A 0002 0001 0005Case B 012 022 018
only have higher rate of convergence but also are smootherthan blue curves In particular the red curves all convergewithin 0005∘ Instead the blue curves fluctuate within arange of 022∘ The results show that the dual model has
obviously a faster convergent speed and higher accuracy thanthat in Case B
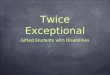
22 Vehicle Test and Results In order to verify the perfor-mance of the proposed algorithm vehicle tests are conducted[12ndash14] The test configuration is illustrated in Figure 3 Aslab and four steel dowels are machined which could beused to artificially misalign the SINS from the MINS (MasterInertialNavigation System) in pitch roll and yaw In practicalengineering the model based additive quaternion is difficultto establish However if the rough misalignment is knownthe attitude of SINS can be calibrated directly and the first
4 Discrete Dynamics in Nature and Society
10 15 20 25 30 35 40 45 50 55 60Time (s)
Pitch estimation error
Case A Case B
(∘)
minus07
minus06
minus05
minus04
minus03
minus02
minus01
0
01
02
03
(a)
10 15 20 25 30 35 40 45 50 55 60Time (s)
minus05
minus04
minus03
minus02
minus01
0
01
02
03Roll estimation error
Case A Case B
(∘)
(b)
10 15 20 25 30 35 40 45 50 55 60Time (s)
minus1
minus08
minus06
minus04
minus02
0
02
Yaw estimation error
Case A Case B
(∘)
(c)
Figure 2 The attitude estimation error of second phase
Figure 3 SINS and MINS of the vehicle test
phase can be skippedwhichmeans a twice transfer alignmentcan be directly conducted with the rough misalignment Theperformance of transfer alignment is assessed with differentassumed misalignments Figure 4 illustrates the alignmentresults
In Figure 3 the SINS and MINS are bolted to the slab inthe test The steel dowels are used to establish misalignmentsin three axes intentionally In the test the misalignmentsin pitch roll and yaw are set at about 10∘ 0∘ and 33∘respectively The positive roll and return-to-level maneuveris adopted in tests which can be called wing-rock maneuverOnce transfer alignment begins one end of the slab ismanually tilted up and set back down in the vehicle
Discrete Dynamics in Nature and Society 5
0 20 40 60 80 100
Estimated attitude misalignment
t (s)
95
10
105
11
Pitc
h m
isalig
nmen
t(∘)
(a)
0 20 40 60 80 100t (s)
minus1
minus05
0
05
Roll
misa
lignm
ent
(∘)
(b)
0 20 40 60 80 100t (s)
32
33
34
Yaw
misa
lignm
ent
(∘)
(105∘ 0∘ 33∘)(105∘ 0∘ 335∘)(10∘ 0∘ 33∘)
(c)
Figure 4 Curve of the vehicle results
Figure 4 compares the estimated attitude misalignmentsin three axes when the assumed misalignments used tocalibrate attitude of SINS are different In the figure attitudemisalignments are accurately estimated in spite of the factthat the assumed misalignments are different The deviationof the estimated value is less than 01∘
3 Conclusion
In order to satisfy the requirements of rapidity and highaccuracy in transfer alignmentwith large uncertainty a trans-fer alignment algorithm based on dual model is presentedThe simulation and vehicle test results demonstrate that thismethod could combine the advantages of nonlinear andlinear error models which not only can be used in inertialnavigation system with large uncertainty but also has thesame high accuracy as the linear system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by NSAF (Grant no U1330133) andthe Natural Science Foundation of Jiangsu Province (GrantBK20130774)
References
[1] J Kain and J Cloutier ldquoRapid transfer alignment for tacticalweapon applicationsrdquo AIAA Paper 89-3581 The AmericanInstitute of Aeronautics and Astronautics 1989
[2] Y Luo G Wei X Ding and Y Liu ldquoController design for 2-D stochastic nonlinear Roesser model a probability-dependentgain-scheduling approachrdquo Journal of the Franklin Institute vol351 no 11 pp 5182ndash5203 2014
[3] H Hong J Lee and G Park ldquoIn-flight alignment of SDINSunder large initial heading errorrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA Paper 2001-4183 Montreal Canada August 2001
[4] L Wang G Wei and W Li ldquoProbability-dependent 119867infin
synchronization control for dynamical networkswith randomlyvarying nonlinearitiesrdquo Neurocomputing vol 133 pp 369ndash3762014
[5] L Wang G Wei and H Shu ldquoState estimation for complexnetworks with randomly occurring coupling delaysrdquo Neuro-computing vol 122 pp 513ndash520 2013
[6] J Liang F Sun and X Liu ldquoFinite-horizon 119867infin
filteringfor time-varying delay systems with randomly varying non-linearities and sensor saturationsrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 108ndash118 2014
[7] A Ghanbari and M Moghanni-Bavil-Olyaei ldquoAdaptive fuzzyterminal sliding-mode control of MEMS z-axis gyroscope withextended Kalman filter observerrdquo Systems Science and ControlEngineering vol 2 no 1 pp 183ndash191 2014
[8] M Darouach and H S Ali ldquoOptimal unbiased functionalfiltering in the frequency domainrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 308ndash315 2014
[9] D Ding Z Wang J Hu and H Shu ldquoDissipative control forstate-saturated discrete time-varying systems with randomlyoccurring nonlinearities and missing measurementsrdquo Interna-tional Journal of Control vol 86 no 4 pp 674ndash688 2013
[10] J Hu Z Wang H Gao and L K Stergioulas ldquoProbability-guaranteed 119867
infinfinite-horizon filtering for a class of nonlinear
time-varying systems with sensor saturationsrdquo Systems andControl Letters vol 61 no 4 pp 477ndash484 2012
[11] S J Julier J K Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings ofthe American Control Conference vol 3 pp 1628ndash1632 IEEESeattle Wash USA Jun 1995
[12] K J Shortelle W R Graham and C Rabourn ldquoF-16 flight testsof a rapid transfer alignment procedurerdquo in Proceedings of thIEEEPosition Location andNavigation Symposium pp 379ndash386IEEE Palm Springs Calif USA April 1998
[13] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[14] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Discrete Dynamics in Nature and Society
the attitude error The quaternion and velocity error differ-ential equation can be given as follows
120575 =
1
2
119872120575 119876 +
1
2
119880 (120576119887+119882119887
119892) minus
1
2
119884120575120596119899
119894119899
120575V119899 = minus2 [1006704119862119899119904
1006704119891119887] times 119884119879120575 119876 + 21006704119862
119899
119904
1006704119891119887119876119879120575 119876
minus 1198841198791198801006704119891119887+ 1006704119862119899
119904nabla119887minus (2120596
119899
119894119890+ 120596119899
119890119899) times 120575V119899
minus (2120596119899
119894119890+ 120596119899
119890119899) times V119899
(2)
where 120575 119876 is the quaternion error vector120596119899119894119899= [120596119864
120596119873
120596119880]
is the rotation rate of the navigation frame with respect tothe inertial frame defined in the navigation frame 120596119887
119894119887=
[120596119909120596119910120596119911] represents the rotational angular velocity of
SINS (Slave Inertial Navigation System) with respect to theinertial frame defined in the SINS body frame the matrices119880 119884 and119872 can be presented as follows
119880 =
[
[
[
[
[
[
minus1199021minus1199022minus1199023
1199020
minus1199023
1199022
1199023
1199020
minus1199021
minus1199022
1199021
1199020
]
]
]
]
]
]
119884 =
[
[
[
[
[
[
minus1199021minus1199022minus1199023
1199020
1199023
minus1199022
minus1199023
1199020
1199021
1199022
minus1199021
1199020
]
]
]
]
]
]
119872 =
[
[
[
[
[
[
0 120596119864minus 120596119909
120596119873minus 120596119910
120596119880minus 120596119911
120596119909minus 120596119864
0 120596119911+ 120596119880
minus120596119910minus 120596119873
120596119910minus 120596119873
minus120596119911minus 120596119880
0 120596119909+ 120596119864
120596119911minus 120596119880
120596119910+ 120596119873
minus120596119909minus 120596119864
0
]
]
]
]
]
]
(3)
1006704119862119899
119904is the indicated transformation matrix of SINS from the
body frame to the navigation frame 1006704119891119887 indicates specific
force of SINS in its body frame 120596119899119894119890is the rotation rate of
the Earth with respect to the inertial frame defined in thenavigation frame 120596119899
119890119899is the turn rotational angular velocity
of the navigation frame with respect to the Earth V119899 =
[V119890 V119899
V119906] indicates velocity vector of SINS with respect to
Earth in the navigation frame 119884119879119880 1006704119891119887 is the nonlinear term
in the equation of velocity error
(B) Model of Rapid Transfer Alignment This model waspresented by Kain and Cloutier in [1] The state variables arepresented as
119909 = [120593119899120575V119899 120576
119894nabla119894120582119894] (4)
where 120593 = [120593119909120593119910120593119911] is defined as the rotation vector
error between the true navigation frame 119899 and the indicated
navigation frame 1198991015840 If 120593 is sufficiently small the state
equation can be expressed as follows
120575119899= 119891119899times 120593119899minus (2120575120596
119899
119894119890+ 120575120596119899
119890119899) times 119881119899
minus (2120596119899
119894119890+ 120596119899
119890119899) times 120575119881
119899+ 119862119899
119887nabla119894
119899= minus120596119899
119894119899times 120593119899+ 120575120596119899
119894119899+ 119862119899
119887120576119894
120576119894= 0 nabla
119894= 0
120577119894= 0
(5)
where 120593119899 and 120575119881119899 are the attitude error and velocity error
vectors respectively 119881119899 indicates velocity vector in thenavigation frame119891119899 indicates specific force in the navigationframe 120596119899
119894119890is the Earth rate vector 120596119899
119890119899is the turn rate of
the navigation frame with respect to the Earth 119862119899119887is the
direction cosine matrix of SINS 120576119894and nabla
119894(119894 = 119909 119910 119911) are
equivalent gyrodrift vector and equivalent accelerometer biasvector respectively in the body frame 120577
119894(119894 = 119909 119910 119911) is 3-axis
component of INS installation error angle vector in the bodyframe
(C) Transfer Alignment Based on Dual Model By a largeamount of simulation tests we find out that attitude errorcan quickly converge to small angles when the error modelbased on quaternion is used under the condition of largemisalignment angle However it still takes a long time toconverge to a satisfactory accuracy In this case we intend toswitch to the linear model to obtain faster convergence speedand higher accuracy This approach is called a twice transferalignment based on dual model This method uses nonlinearmodel in first phase Then after the estimation of attitudeerror converging to small angles the linear error model isadopted to complete the twice transfer alignment
2 Experimental Results
21 Simulation and Results The simulation is performedin two different cases In Case A model based quaternionand EKF which is easily realized in engineering project areadopted in the first phase Through analyzing the perfor-mance of the nonlinear system by simulation experimentsthe time point to switch to linear error model and classicalKalman filter in the next stage is decided at the 10th secondIn Case B model based additive quaternion and EKF areutilized The initial attitude errors in roll pitch and headingare all assumed to be 20∘ The total time of the simulation is60 s the initial position is set at 325 degrees north latitude135 degrees east longitude 500 meters height the initialattitudes are all set at 0∘ the initial north velocity is 50mseast and vertical velocities are 0ms The constant gyrodriftsand accelerometer biases are set at 10∘h 5mg respectivelyThe simulation results are shown in Figures 1-2 and Table 1
Figure 1 shows the alignment results in the first phaseThefigures indicate that the attitude estimation error gets wellinto the range of the ideal accuracy during the first 10 s Afterthe calibration is done the conventional transfer alignmentprocess will work well in the following 50 s
Figure 2 andTable 1 compare the attitude estimation errorin Case Awith that in Case B It is clear that the red curves not
Discrete Dynamics in Nature and Society 3
0 2 4 6 8 10
0
5
Time (s)
Pitch estimation error
Case A Case B
6 8 10
0
minus25
minus20
minus15
minus10
minus5
minus05
05
(∘)
(a)
0 2 4 6 8 10Time (s)
Roll estimation error
0
5
Case A Case B
minus20
minus15
minus10
minus5
minus02
minus04
02(∘)
0
6 8 10
(b)
Yaw estimation error
0 2 4 6 8 10
0
Time (s)
Case A Case B
6 8 10
minus25
minus20
minus15
minus10
minus5
minus06
minus08
minus1
(∘)
(c)
Figure 1 The attitude estimation error of first phase
Table 1 Alignment accuracy comparison
Estimated error of attitude (∘)Pitch Roll Yaw
Case A 0002 0001 0005Case B 012 022 018
only have higher rate of convergence but also are smootherthan blue curves In particular the red curves all convergewithin 0005∘ Instead the blue curves fluctuate within arange of 022∘ The results show that the dual model has
obviously a faster convergent speed and higher accuracy thanthat in Case B
22 Vehicle Test and Results In order to verify the perfor-mance of the proposed algorithm vehicle tests are conducted[12ndash14] The test configuration is illustrated in Figure 3 Aslab and four steel dowels are machined which could beused to artificially misalign the SINS from the MINS (MasterInertialNavigation System) in pitch roll and yaw In practicalengineering the model based additive quaternion is difficultto establish However if the rough misalignment is knownthe attitude of SINS can be calibrated directly and the first
4 Discrete Dynamics in Nature and Society
10 15 20 25 30 35 40 45 50 55 60Time (s)
Pitch estimation error
Case A Case B
(∘)
minus07
minus06
minus05
minus04
minus03
minus02
minus01
0
01
02
03
(a)
10 15 20 25 30 35 40 45 50 55 60Time (s)
minus05
minus04
minus03
minus02
minus01
0
01
02
03Roll estimation error
Case A Case B
(∘)
(b)
10 15 20 25 30 35 40 45 50 55 60Time (s)
minus1
minus08
minus06
minus04
minus02
0
02
Yaw estimation error
Case A Case B
(∘)
(c)
Figure 2 The attitude estimation error of second phase
Figure 3 SINS and MINS of the vehicle test
phase can be skippedwhichmeans a twice transfer alignmentcan be directly conducted with the rough misalignment Theperformance of transfer alignment is assessed with differentassumed misalignments Figure 4 illustrates the alignmentresults
In Figure 3 the SINS and MINS are bolted to the slab inthe test The steel dowels are used to establish misalignmentsin three axes intentionally In the test the misalignmentsin pitch roll and yaw are set at about 10∘ 0∘ and 33∘respectively The positive roll and return-to-level maneuveris adopted in tests which can be called wing-rock maneuverOnce transfer alignment begins one end of the slab ismanually tilted up and set back down in the vehicle
Discrete Dynamics in Nature and Society 5
0 20 40 60 80 100
Estimated attitude misalignment
t (s)
95
10
105
11
Pitc
h m
isalig
nmen
t(∘)
(a)
0 20 40 60 80 100t (s)
minus1
minus05
0
05
Roll
misa
lignm
ent
(∘)
(b)
0 20 40 60 80 100t (s)
32
33
34
Yaw
misa
lignm
ent
(∘)
(105∘ 0∘ 33∘)(105∘ 0∘ 335∘)(10∘ 0∘ 33∘)
(c)
Figure 4 Curve of the vehicle results
Figure 4 compares the estimated attitude misalignmentsin three axes when the assumed misalignments used tocalibrate attitude of SINS are different In the figure attitudemisalignments are accurately estimated in spite of the factthat the assumed misalignments are different The deviationof the estimated value is less than 01∘
3 Conclusion
In order to satisfy the requirements of rapidity and highaccuracy in transfer alignmentwith large uncertainty a trans-fer alignment algorithm based on dual model is presentedThe simulation and vehicle test results demonstrate that thismethod could combine the advantages of nonlinear andlinear error models which not only can be used in inertialnavigation system with large uncertainty but also has thesame high accuracy as the linear system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by NSAF (Grant no U1330133) andthe Natural Science Foundation of Jiangsu Province (GrantBK20130774)
References
[1] J Kain and J Cloutier ldquoRapid transfer alignment for tacticalweapon applicationsrdquo AIAA Paper 89-3581 The AmericanInstitute of Aeronautics and Astronautics 1989
[2] Y Luo G Wei X Ding and Y Liu ldquoController design for 2-D stochastic nonlinear Roesser model a probability-dependentgain-scheduling approachrdquo Journal of the Franklin Institute vol351 no 11 pp 5182ndash5203 2014
[3] H Hong J Lee and G Park ldquoIn-flight alignment of SDINSunder large initial heading errorrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA Paper 2001-4183 Montreal Canada August 2001
[4] L Wang G Wei and W Li ldquoProbability-dependent 119867infin
synchronization control for dynamical networkswith randomlyvarying nonlinearitiesrdquo Neurocomputing vol 133 pp 369ndash3762014
[5] L Wang G Wei and H Shu ldquoState estimation for complexnetworks with randomly occurring coupling delaysrdquo Neuro-computing vol 122 pp 513ndash520 2013
[6] J Liang F Sun and X Liu ldquoFinite-horizon 119867infin
filteringfor time-varying delay systems with randomly varying non-linearities and sensor saturationsrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 108ndash118 2014
[7] A Ghanbari and M Moghanni-Bavil-Olyaei ldquoAdaptive fuzzyterminal sliding-mode control of MEMS z-axis gyroscope withextended Kalman filter observerrdquo Systems Science and ControlEngineering vol 2 no 1 pp 183ndash191 2014
[8] M Darouach and H S Ali ldquoOptimal unbiased functionalfiltering in the frequency domainrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 308ndash315 2014
[9] D Ding Z Wang J Hu and H Shu ldquoDissipative control forstate-saturated discrete time-varying systems with randomlyoccurring nonlinearities and missing measurementsrdquo Interna-tional Journal of Control vol 86 no 4 pp 674ndash688 2013
[10] J Hu Z Wang H Gao and L K Stergioulas ldquoProbability-guaranteed 119867
infinfinite-horizon filtering for a class of nonlinear
time-varying systems with sensor saturationsrdquo Systems andControl Letters vol 61 no 4 pp 477ndash484 2012
[11] S J Julier J K Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings ofthe American Control Conference vol 3 pp 1628ndash1632 IEEESeattle Wash USA Jun 1995
[12] K J Shortelle W R Graham and C Rabourn ldquoF-16 flight testsof a rapid transfer alignment procedurerdquo in Proceedings of thIEEEPosition Location andNavigation Symposium pp 379ndash386IEEE Palm Springs Calif USA April 1998
[13] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[14] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 3
0 2 4 6 8 10
0
5
Time (s)
Pitch estimation error
Case A Case B
6 8 10
0
minus25
minus20
minus15
minus10
minus5
minus05
05
(∘)
(a)
0 2 4 6 8 10Time (s)
Roll estimation error
0
5
Case A Case B
minus20
minus15
minus10
minus5
minus02
minus04
02(∘)
0
6 8 10
(b)
Yaw estimation error
0 2 4 6 8 10
0
Time (s)
Case A Case B
6 8 10
minus25
minus20
minus15
minus10
minus5
minus06
minus08
minus1
(∘)
(c)
Figure 1 The attitude estimation error of first phase
Table 1 Alignment accuracy comparison
Estimated error of attitude (∘)Pitch Roll Yaw
Case A 0002 0001 0005Case B 012 022 018
only have higher rate of convergence but also are smootherthan blue curves In particular the red curves all convergewithin 0005∘ Instead the blue curves fluctuate within arange of 022∘ The results show that the dual model has
obviously a faster convergent speed and higher accuracy thanthat in Case B
22 Vehicle Test and Results In order to verify the perfor-mance of the proposed algorithm vehicle tests are conducted[12ndash14] The test configuration is illustrated in Figure 3 Aslab and four steel dowels are machined which could beused to artificially misalign the SINS from the MINS (MasterInertialNavigation System) in pitch roll and yaw In practicalengineering the model based additive quaternion is difficultto establish However if the rough misalignment is knownthe attitude of SINS can be calibrated directly and the first
4 Discrete Dynamics in Nature and Society
10 15 20 25 30 35 40 45 50 55 60Time (s)
Pitch estimation error
Case A Case B
(∘)
minus07
minus06
minus05
minus04
minus03
minus02
minus01
0
01
02
03
(a)
10 15 20 25 30 35 40 45 50 55 60Time (s)
minus05
minus04
minus03
minus02
minus01
0
01
02
03Roll estimation error
Case A Case B
(∘)
(b)
10 15 20 25 30 35 40 45 50 55 60Time (s)
minus1
minus08
minus06
minus04
minus02
0
02
Yaw estimation error
Case A Case B
(∘)
(c)
Figure 2 The attitude estimation error of second phase
Figure 3 SINS and MINS of the vehicle test
phase can be skippedwhichmeans a twice transfer alignmentcan be directly conducted with the rough misalignment Theperformance of transfer alignment is assessed with differentassumed misalignments Figure 4 illustrates the alignmentresults
In Figure 3 the SINS and MINS are bolted to the slab inthe test The steel dowels are used to establish misalignmentsin three axes intentionally In the test the misalignmentsin pitch roll and yaw are set at about 10∘ 0∘ and 33∘respectively The positive roll and return-to-level maneuveris adopted in tests which can be called wing-rock maneuverOnce transfer alignment begins one end of the slab ismanually tilted up and set back down in the vehicle
Discrete Dynamics in Nature and Society 5
0 20 40 60 80 100
Estimated attitude misalignment
t (s)
95
10
105
11
Pitc
h m
isalig
nmen
t(∘)
(a)
0 20 40 60 80 100t (s)
minus1
minus05
0
05
Roll
misa
lignm
ent
(∘)
(b)
0 20 40 60 80 100t (s)
32
33
34
Yaw
misa
lignm
ent
(∘)
(105∘ 0∘ 33∘)(105∘ 0∘ 335∘)(10∘ 0∘ 33∘)
(c)
Figure 4 Curve of the vehicle results
Figure 4 compares the estimated attitude misalignmentsin three axes when the assumed misalignments used tocalibrate attitude of SINS are different In the figure attitudemisalignments are accurately estimated in spite of the factthat the assumed misalignments are different The deviationof the estimated value is less than 01∘
3 Conclusion
In order to satisfy the requirements of rapidity and highaccuracy in transfer alignmentwith large uncertainty a trans-fer alignment algorithm based on dual model is presentedThe simulation and vehicle test results demonstrate that thismethod could combine the advantages of nonlinear andlinear error models which not only can be used in inertialnavigation system with large uncertainty but also has thesame high accuracy as the linear system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by NSAF (Grant no U1330133) andthe Natural Science Foundation of Jiangsu Province (GrantBK20130774)
References
[1] J Kain and J Cloutier ldquoRapid transfer alignment for tacticalweapon applicationsrdquo AIAA Paper 89-3581 The AmericanInstitute of Aeronautics and Astronautics 1989
[2] Y Luo G Wei X Ding and Y Liu ldquoController design for 2-D stochastic nonlinear Roesser model a probability-dependentgain-scheduling approachrdquo Journal of the Franklin Institute vol351 no 11 pp 5182ndash5203 2014
[3] H Hong J Lee and G Park ldquoIn-flight alignment of SDINSunder large initial heading errorrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA Paper 2001-4183 Montreal Canada August 2001
[4] L Wang G Wei and W Li ldquoProbability-dependent 119867infin
synchronization control for dynamical networkswith randomlyvarying nonlinearitiesrdquo Neurocomputing vol 133 pp 369ndash3762014
[5] L Wang G Wei and H Shu ldquoState estimation for complexnetworks with randomly occurring coupling delaysrdquo Neuro-computing vol 122 pp 513ndash520 2013
[6] J Liang F Sun and X Liu ldquoFinite-horizon 119867infin
filteringfor time-varying delay systems with randomly varying non-linearities and sensor saturationsrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 108ndash118 2014
[7] A Ghanbari and M Moghanni-Bavil-Olyaei ldquoAdaptive fuzzyterminal sliding-mode control of MEMS z-axis gyroscope withextended Kalman filter observerrdquo Systems Science and ControlEngineering vol 2 no 1 pp 183ndash191 2014
[8] M Darouach and H S Ali ldquoOptimal unbiased functionalfiltering in the frequency domainrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 308ndash315 2014
[9] D Ding Z Wang J Hu and H Shu ldquoDissipative control forstate-saturated discrete time-varying systems with randomlyoccurring nonlinearities and missing measurementsrdquo Interna-tional Journal of Control vol 86 no 4 pp 674ndash688 2013
[10] J Hu Z Wang H Gao and L K Stergioulas ldquoProbability-guaranteed 119867
infinfinite-horizon filtering for a class of nonlinear
time-varying systems with sensor saturationsrdquo Systems andControl Letters vol 61 no 4 pp 477ndash484 2012
[11] S J Julier J K Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings ofthe American Control Conference vol 3 pp 1628ndash1632 IEEESeattle Wash USA Jun 1995
[12] K J Shortelle W R Graham and C Rabourn ldquoF-16 flight testsof a rapid transfer alignment procedurerdquo in Proceedings of thIEEEPosition Location andNavigation Symposium pp 379ndash386IEEE Palm Springs Calif USA April 1998
[13] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[14] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Discrete Dynamics in Nature and Society
10 15 20 25 30 35 40 45 50 55 60Time (s)
Pitch estimation error
Case A Case B
(∘)
minus07
minus06
minus05
minus04
minus03
minus02
minus01
0
01
02
03
(a)
10 15 20 25 30 35 40 45 50 55 60Time (s)
minus05
minus04
minus03
minus02
minus01
0
01
02
03Roll estimation error
Case A Case B
(∘)
(b)
10 15 20 25 30 35 40 45 50 55 60Time (s)
minus1
minus08
minus06
minus04
minus02
0
02
Yaw estimation error
Case A Case B
(∘)
(c)
Figure 2 The attitude estimation error of second phase
Figure 3 SINS and MINS of the vehicle test
phase can be skippedwhichmeans a twice transfer alignmentcan be directly conducted with the rough misalignment Theperformance of transfer alignment is assessed with differentassumed misalignments Figure 4 illustrates the alignmentresults
In Figure 3 the SINS and MINS are bolted to the slab inthe test The steel dowels are used to establish misalignmentsin three axes intentionally In the test the misalignmentsin pitch roll and yaw are set at about 10∘ 0∘ and 33∘respectively The positive roll and return-to-level maneuveris adopted in tests which can be called wing-rock maneuverOnce transfer alignment begins one end of the slab ismanually tilted up and set back down in the vehicle
Discrete Dynamics in Nature and Society 5
0 20 40 60 80 100
Estimated attitude misalignment
t (s)
95
10
105
11
Pitc
h m
isalig
nmen
t(∘)
(a)
0 20 40 60 80 100t (s)
minus1
minus05
0
05
Roll
misa
lignm
ent
(∘)
(b)
0 20 40 60 80 100t (s)
32
33
34
Yaw
misa
lignm
ent
(∘)
(105∘ 0∘ 33∘)(105∘ 0∘ 335∘)(10∘ 0∘ 33∘)
(c)
Figure 4 Curve of the vehicle results
Figure 4 compares the estimated attitude misalignmentsin three axes when the assumed misalignments used tocalibrate attitude of SINS are different In the figure attitudemisalignments are accurately estimated in spite of the factthat the assumed misalignments are different The deviationof the estimated value is less than 01∘
3 Conclusion
In order to satisfy the requirements of rapidity and highaccuracy in transfer alignmentwith large uncertainty a trans-fer alignment algorithm based on dual model is presentedThe simulation and vehicle test results demonstrate that thismethod could combine the advantages of nonlinear andlinear error models which not only can be used in inertialnavigation system with large uncertainty but also has thesame high accuracy as the linear system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by NSAF (Grant no U1330133) andthe Natural Science Foundation of Jiangsu Province (GrantBK20130774)
References
[1] J Kain and J Cloutier ldquoRapid transfer alignment for tacticalweapon applicationsrdquo AIAA Paper 89-3581 The AmericanInstitute of Aeronautics and Astronautics 1989
[2] Y Luo G Wei X Ding and Y Liu ldquoController design for 2-D stochastic nonlinear Roesser model a probability-dependentgain-scheduling approachrdquo Journal of the Franklin Institute vol351 no 11 pp 5182ndash5203 2014
[3] H Hong J Lee and G Park ldquoIn-flight alignment of SDINSunder large initial heading errorrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA Paper 2001-4183 Montreal Canada August 2001
[4] L Wang G Wei and W Li ldquoProbability-dependent 119867infin
synchronization control for dynamical networkswith randomlyvarying nonlinearitiesrdquo Neurocomputing vol 133 pp 369ndash3762014
[5] L Wang G Wei and H Shu ldquoState estimation for complexnetworks with randomly occurring coupling delaysrdquo Neuro-computing vol 122 pp 513ndash520 2013
[6] J Liang F Sun and X Liu ldquoFinite-horizon 119867infin
filteringfor time-varying delay systems with randomly varying non-linearities and sensor saturationsrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 108ndash118 2014
[7] A Ghanbari and M Moghanni-Bavil-Olyaei ldquoAdaptive fuzzyterminal sliding-mode control of MEMS z-axis gyroscope withextended Kalman filter observerrdquo Systems Science and ControlEngineering vol 2 no 1 pp 183ndash191 2014
[8] M Darouach and H S Ali ldquoOptimal unbiased functionalfiltering in the frequency domainrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 308ndash315 2014
[9] D Ding Z Wang J Hu and H Shu ldquoDissipative control forstate-saturated discrete time-varying systems with randomlyoccurring nonlinearities and missing measurementsrdquo Interna-tional Journal of Control vol 86 no 4 pp 674ndash688 2013
[10] J Hu Z Wang H Gao and L K Stergioulas ldquoProbability-guaranteed 119867
infinfinite-horizon filtering for a class of nonlinear
time-varying systems with sensor saturationsrdquo Systems andControl Letters vol 61 no 4 pp 477ndash484 2012
[11] S J Julier J K Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings ofthe American Control Conference vol 3 pp 1628ndash1632 IEEESeattle Wash USA Jun 1995
[12] K J Shortelle W R Graham and C Rabourn ldquoF-16 flight testsof a rapid transfer alignment procedurerdquo in Proceedings of thIEEEPosition Location andNavigation Symposium pp 379ndash386IEEE Palm Springs Calif USA April 1998
[13] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[14] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Discrete Dynamics in Nature and Society 5
0 20 40 60 80 100
Estimated attitude misalignment
t (s)
95
10
105
11
Pitc
h m
isalig
nmen
t(∘)
(a)
0 20 40 60 80 100t (s)
minus1
minus05
0
05
Roll
misa
lignm
ent
(∘)
(b)
0 20 40 60 80 100t (s)
32
33
34
Yaw
misa
lignm
ent
(∘)
(105∘ 0∘ 33∘)(105∘ 0∘ 335∘)(10∘ 0∘ 33∘)
(c)
Figure 4 Curve of the vehicle results
Figure 4 compares the estimated attitude misalignmentsin three axes when the assumed misalignments used tocalibrate attitude of SINS are different In the figure attitudemisalignments are accurately estimated in spite of the factthat the assumed misalignments are different The deviationof the estimated value is less than 01∘
3 Conclusion
In order to satisfy the requirements of rapidity and highaccuracy in transfer alignmentwith large uncertainty a trans-fer alignment algorithm based on dual model is presentedThe simulation and vehicle test results demonstrate that thismethod could combine the advantages of nonlinear andlinear error models which not only can be used in inertialnavigation system with large uncertainty but also has thesame high accuracy as the linear system
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work was supported by NSAF (Grant no U1330133) andthe Natural Science Foundation of Jiangsu Province (GrantBK20130774)
References
[1] J Kain and J Cloutier ldquoRapid transfer alignment for tacticalweapon applicationsrdquo AIAA Paper 89-3581 The AmericanInstitute of Aeronautics and Astronautics 1989
[2] Y Luo G Wei X Ding and Y Liu ldquoController design for 2-D stochastic nonlinear Roesser model a probability-dependentgain-scheduling approachrdquo Journal of the Franklin Institute vol351 no 11 pp 5182ndash5203 2014
[3] H Hong J Lee and G Park ldquoIn-flight alignment of SDINSunder large initial heading errorrdquo in Proceedings of the AIAAGuidance Navigation and Control Conference and ExhibitAIAA Paper 2001-4183 Montreal Canada August 2001
[4] L Wang G Wei and W Li ldquoProbability-dependent 119867infin
synchronization control for dynamical networkswith randomlyvarying nonlinearitiesrdquo Neurocomputing vol 133 pp 369ndash3762014
[5] L Wang G Wei and H Shu ldquoState estimation for complexnetworks with randomly occurring coupling delaysrdquo Neuro-computing vol 122 pp 513ndash520 2013
[6] J Liang F Sun and X Liu ldquoFinite-horizon 119867infin
filteringfor time-varying delay systems with randomly varying non-linearities and sensor saturationsrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 108ndash118 2014
[7] A Ghanbari and M Moghanni-Bavil-Olyaei ldquoAdaptive fuzzyterminal sliding-mode control of MEMS z-axis gyroscope withextended Kalman filter observerrdquo Systems Science and ControlEngineering vol 2 no 1 pp 183ndash191 2014
[8] M Darouach and H S Ali ldquoOptimal unbiased functionalfiltering in the frequency domainrdquo Systems Science amp ControlEngineering vol 2 no 1 pp 308ndash315 2014
[9] D Ding Z Wang J Hu and H Shu ldquoDissipative control forstate-saturated discrete time-varying systems with randomlyoccurring nonlinearities and missing measurementsrdquo Interna-tional Journal of Control vol 86 no 4 pp 674ndash688 2013
[10] J Hu Z Wang H Gao and L K Stergioulas ldquoProbability-guaranteed 119867
infinfinite-horizon filtering for a class of nonlinear
time-varying systems with sensor saturationsrdquo Systems andControl Letters vol 61 no 4 pp 477ndash484 2012
[11] S J Julier J K Uhlmann and H F Durrant-Whyte ldquoA newapproach for filtering nonlinear systemsrdquo in Proceedings ofthe American Control Conference vol 3 pp 1628ndash1632 IEEESeattle Wash USA Jun 1995
[12] K J Shortelle W R Graham and C Rabourn ldquoF-16 flight testsof a rapid transfer alignment procedurerdquo in Proceedings of thIEEEPosition Location andNavigation Symposium pp 379ndash386IEEE Palm Springs Calif USA April 1998
[13] B Shen Z Wang H Shu and G Wei ldquoRobust 119867infin
finite-horizon filtering with randomly occurred nonlinearities andquantization effectsrdquo Automatica vol 46 no 11 pp 1743ndash17512010
[14] H Dong Z Wang J Lam and H Gao ldquoDistributed filteringin sensor networks with randomly occurring saturations andsuccessive packet dropoutsrdquo International Journal of Robust andNonlinear Control vol 24 no 12 pp 1743ndash1759 2014
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of