Embed Size (px)
Citation preview

Research ArticleOn the Solution of a Nonlinear Semidefinite Program Arising inDiscrete-Time Feedback Control Design
El-Sayed M E Mostafa
Department of Mathematics Faculty of Science Alexandria University Moharam Bey Alexandria 21511 Egypt
Correspondence should be addressed to El-Sayed M E Mostafa emostafaalex-sciedueg
Received 20 May 2013 Accepted 11 November 2013 Published 2 January 2014
Academic Editor Jung-Fa Tsai
Copyright copy 2014 El-Sayed M E Mostafa This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
A sequential quadratic programming method with line search is analyzed and studied for finding the local solution of a non-linear semidefinite programming problem resulting from the discrete-time output feedback problem The method requires aninitial feasible point with respect to two positive definite constraints By parameterizing the optimization problem we ease thatrequirement The method is tested numerically on several test problems chosen from the benchmark collection (Leibfritz 2004)
1 Introduction
In this paper the following nonlinear semidefinite program-ming (NSDP) problem is considered
min 119869 (119883) st 119867 (119883) = 0 119866 (119883) ≻ 0 (1)
where 119869 R119899times119899 times R119901times119903 rarr R 119867 R119899times119899 times R119901times119903 rarr R119899times119899119866 R119899times119899 times R119901times119903 rarr R119899times119899 are sufficiently smooth matrixfunctions where 119866 ≻ 0 means that 119866 is positive definiteThis problem is assumed to be nonlinear and generallynonconvex The origin of the considered NSDP problem isthe static output feedback (SOF) design problem in which theunknown 119883 is partitioned as 119883 = (119871 119865) where 119871 isin R119899times119899
represents the state variable and 119865 isin R119901times119903 represents thecontrol variable
In the last decade NSDP has attracted the attention ofmany authors in the optimization community For instanceJarre [1] introduced an interior-point method for nonconvexsemi-definite programs Leibfritz and Mostafa [2] proposedan interior-point trust region method for a special classof NSDP problems resulting from the continuous-timeSOF problem Kocvara et al [3] considered an augmentedLagrangian method for a similar NSDP problem Sun et al[4] investigated the rate of convergence of the augmentedLagrangian approach for NSDP Correa and Ramirez [5]proposed sequential semi-definite programming method for
nonlinear semi-definite programming Yamashita and Yabe[6] study local and superlinear convergence of a primal-dualinterior pointmethod Freund et al [7] proposed a sequentialsemidefinite programming approach for a nonlinear programwith nonlinear semidefinite constraints
The design problem of optimal output feedback con-trollers is one of the most studied problems over the lastfour decades in the community of systems and controlClearly this is due to the existence of numerous practicalapplications in system and control engineering finance andstatisticsThebenchmark collection [8] for instance containsover 160 applications from system and control engineeringonly Makila and Toivonen in the survey [9] summarizedseveral special purpose algorithms such as the Levine-Athansmethod the dual Levine-Athans method and the descentAnderson-Moore method as well as Newtonrsquos method forfinding the local solution of a matrix optimization problemthat corresponds to the discrete-time SOF design problemRautert and Sachs [10] proposed a structured quasi-Newtonmethod for the continuous-time SOF problem Makila [11]introduced a matrix optimization problem related to thediscrete-time SOF design problem which is an extension ofthe former problem considered in [9] However it has not yetbeen tested numerically
Several constrained optimization techniques have beendeveloped for constrained optimization problems related
Hindawi Publishing CorporationJournal of Applied MathematicsVolume 2014 Article ID 683797 14 pageshttpdxdoiorg1011552014683797
2 Journal of Applied Mathematics
to the continuous-time SOF design problem For instanceApkarian et al [12] introduced a linear matrix inequalityapproach for the119867
2synthesis problem Leibfritz andMostafa
[13] proposed two trust region methods for two differentformulations of the continuous-time SOF problem Mostafa[14 15] developed a trust regionmethod for the decentralizedSOF problem and an augmented Lagrangian SQP methodfor the continuous-time SOF problem respectively Morerecently Mostafa [16] introduced a trust region method for aparticular constrained optimization problem that originatesfrom the discrete-time SOF problem
In the current work a different formulation of the designproblem is considered that underlies the NSDP problemformulation (1) In fact such an NSDP problem can beseen as a generalization of the matrix optimization problemintroduced by Makila [11] The goal is to study and analyzean SQP method with line search for finding a local solutionof such an NSDP problem The reduced Hessian with a stepdecomposition approach (see eg [17]) is employed withthe SQP method Moreover we compare the SQP methodnumerically versusNewtonrsquosmethod proposed byMakila andToivonen [9] but applied on thematrix optimization problem[11] As is well known SQP methods are among the mosteffective techniques for nonlinear constrained optimizationproblems see for example [17] In particular the problemstructure is exploited with the considered method
The existence of an initial feasible point 1198830
= (1198710 1198650)
with respect to the positive definite constraints is necessaryto start the iteration sequence of the SQP method Such aninitial feasible point can be easy to find in simple problemsbut can be difficult or very time consuming for moderate andcomplex problems A parametrization approach is employedon the NSDP problem that overcomes this difficulty
This paper is organized as follows In the next sectionthe discrete-time SOF problem is introduced and the relatedNSDP problem is stated In Section 3 the SQP method thatfinds a local solution of the NSDP is presented Section 4 isdevoted to overcome the difficulty of finding an initial feasiblepoint (119871
0 1198650) to start the iteration sequence of the SQP
method In order to demonstrate the considered approachwe have tested in Section 5 the SQP method on various testproblems derived from benchmark collection [8]
Notations For a matrix 119866 isin R119899times119899 the notation 119866 ≻ 0 (119866 ⪰ 0)denotes that 119866 is strictly positive (semi)definite The symbolotimes denotes the Kronecker product of two matrices and ⟨sdot sdot⟩
denotes the inner product operator Throughout the paper sdot is the Frobenius norm otherwise it will be mentionedMoreover 119868
119899denotes the identity matrix of order 119899 We omit
the argument when it is known from the context for examplewe use 119869
119896to denote 119869(119883
119896)
2 The Static Output FeedbackControl Problem
The problem of designing an optimal output feedback con-troller for discrete-time control systems is an important and
extensively studied topic in system and control literature seefor example the two survey papers by Makila and Toivonen[9] and Syrmos et al [18] and numerous references thereinincludingGarcia et al [19] Lee andKhargonekar [20]Makila[11] Mostafa [21 22] and Sulikowski et al [23]
Consider the linear time-invariant control systemdescribed by the following discrete time state-spacerealization
119909119896+1
= 119860119909119896+ 119861119906119896+ V119896 119910119896= 119862119909119896+ 119890119896 119896 ge 0 (2)
where 119909119896
isin R119899 is the state vector 119906119896
isin R119901 is the control(input) vector 119910
119896isin R119903 is the measured output vector and
V119896isin R119899 and 119890
119896isin R119903 are disturbance (noise) terms Moreover
119860 119861 and 119862 are given constant matrices of appropriatedimensions
We will consider the following quadratic cost function asan objective function to be minimized
119869 = E[
infin
sum
119896=0
⟨119909119896 119876119909119896⟩ + ⟨119906
119896 119877119906119896⟩] (3)
where E[sdot] is the expected value and 119876 isin R119899times119899 and 119877 isin R119901times119901
are given constant weight matricesThe following control law is often used to close the above
control system
119906119896= 119865119910119896 (4)
where 119865 isin R119901times119903 is the output feedback gain matrixrepresenting the unknown
In order to remove the dependency of the problem onthe initial state vector 119909
0the following assumption is often
imposed
Assumption 1 Assume that1199090is a randomvariable uniformly
distributed over the unit ball such that E[1199090] = 0
Under this assumption the optimal control problem (2)ndash(4) can be transformed into the matrix optimization problem(see [11])
min119865
119869 (119865) = 119869 (119871 (119865) 119865)
= Tr (119871 (119865) (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
(5)
where Tr(sdot) is the trace operator and 119871(119865) solves the discreteLyapunov equation
119871 (119865) = (119860 + 119861119865119862) 119871 (119865) (119860 + 119861119865119862)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
(6)
Assumption 2 Throughout the paper we assume that 119860 isin
R119899times119899 119861 isin R119899times119901 and 119862 isin R119903times119899 are given constant matricesFurthermore we assume that 119876 isin R119899times119899 and 119877 isin R119901times119901 aregiven constant weight matrices and 119877
119890isin R119903times119903 and 119881 isin R119899times119899
are given covariance matrices We assume that 119876 ⪰ 0 while119877 119877119890and 119881 ≻ 0
Journal of Applied Mathematics 3
From Lyapunov stability theory the unknown 119865 must bechosen from the following set
S119865= 119865 isin R
119901times119903
120588 (119860 + 119861119865119862) lt 1 (7)
where 120588(sdot) is the spectral radius This restriction is requiredultimately to guarantee the existence of a unique solution ofthe discrete Lyapunov equation (6) see for example [24]Moreover from the Lyapunov stability theory the next lemmagives an equivalence between the asymptotic stability of thesystem (2) and fulfilling two positive definite constraints
Lemma 3 ([24 Lemma 5719]) Consider the SOF problem(2)ndash(4) An119865 isin S
119865exists if and only if there exists (119871 119865) isin D
119904
where
D119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884 (119871 119865) ≻ 0 (8)
where
119884 (119871 119865) = 119871 minus (119860 + 119861119865119862) 119871(119860 + 119861119865119862)119879
(9)
According to Lemma 3 and by considering both of 119871
and 119865 as independent variables where we skip the imposeddependency of 119871 on 119865 that was considered in (5)-(6) then theminimization problem can be stated as the following NSDP
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
(10)
st 119867 (119871 119865) = minus 119871 + (119860 + 119861119865119862) 119871(119860 + 119861119865119862)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
= 0
(11)
119884 (119871 119865) ≻ 0 119871 ≻ 0 (12)
Instead of considering (5)ndash(7) we would rather considerthe constrained minimization problem (10)ndash(12) which canbe seen as a generalization of the former problem Theequivalence between the stability condition (7) and thepositive definite constraints of (8) provides a straightforwardidea to fulfill such a constraint within the numerical algo-rithm explicitly There are however different alternatives tohandle the positive definite constraints within a numericalalgorithm First onemight incorporate those positive definiteterms within the objective function and apply an interior-point technique on the corresponding constrained problemsee [2] We might also use slack matrix variables for theinequality constraintsThen one solves the problemwith onlyequality constraints
We end this section by noting that the two sets S119865and
D119904are open Therefore it is convenient to replace them by
the two subsets Ω andΩ respectively where both subsets areassumed to be compact For example the level set
Ω = 119865 isin S119865 119869 (119865) le 119869 (119865
0) sube S
119865(13)
is compact see [9]
3 An SQP Method for the Design Problem
Let us consider the minimization problem (10)ndash(12) TheLagrangian function associated with the equality constraintis defined as
ℓ (119871 119865 119870) = 119869 (119871 119865) + ⟨119870119867 (119871 119865)⟩ (14)
where 119870 isin R119899times119899 is the Lagrange multiplier The next lemmaincludes first- and second-order derivatives of ℓ and firstderivatives of the function119867 Similar results can be found in[16 Lemma 21] but on a simpler problem In the followingdiscussion we denote 119860(119865) = 119860 + 119861119865119862 and 119876(119865) = 119876 +
119862119879
119865119879
119877119865119862
Lemma 4 Consider the NSDP problem (10)ndash(12) TheLagrangian function ℓ(119871 119865119870) is twice continuously differen-tiable and its first- and second-order directional derivatives aswell as first-order derivatives of the constraint function 119867 arethe following
ℓ119871(sdot) Δ119871 = Tr ((119860(119865)119879119870119860 (119865) + 119876 (119865) minus 119870)Δ119871)
ℓ119865(sdot) Δ119865 = Tr (2119870
119865119871119862119879
Δ119865119879
+2 (119861119879
119870119861 + 119877)119865119877119890Δ119865119879
)
ℓ119871119871
(sdot) (Δ119871 Δ119871) = 0
ℓ119871119865
(sdot) (Δ119871 Δ119865) = ℓ119865119871
(119871 119865 119870) (Δ119865 Δ119871)
= Tr (2119870119865Δ119871119862119879
Δ119865119879
)
ℓ119865119865
(sdot) (Δ119865 Δ119865) = Tr (2 (119861119879119870119861+119877)Δ119865 (119862119871119862119879
+119877119890) Δ119865119879
)
119867119871(sdot) Δ119871 = ⟨Δ119871 nabla
119871119867(sdot)⟩ = Δ119871 minus 119860 (119865) Δ119871119860(119865)
119879
119867119865(sdot) Δ119865 = ⟨Δ119865 nabla
119865119867(sdot)⟩ = 119861Δ119865119871
119879
119865+ 119871119865Δ119865119879
119861119879
(15)
where119870119865= 119861119879
119870119860(119865) + 119877119865119862 and 119871119865= 119860(119865)119871119862
119879
+ 119861119865119877119890
Proof By using the directional derivatives with both of ℓ and119867 the above derivatives are obtained
The Karush-Kuhn-Tucker (KKT) optimality conditionsyield a nonlinear system of matrix equations as given in thenext lemma
Lemma 5 (see eg [7 Section 5]) Let (119871 119865) isin D119904be a local
minimizer of the problem (10)ndash(12) and let (10)ndash(12) be regularat (119871 119865) Then there exists a Lagrange multiplier 119870 isin R119899times119899
satisfying with 119871 and 119865 the following KKT conditions
M (119880) = (
2119870119865119871119862119879
+ 2 (119861119879
119870119861 + 119877)119865119877119890
minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865)
)
= 0
(16)
where 119870119865is as defined in Lemma 4 and 119880 = (119871 119865119870) isin D
119904times
R119899times119899
4 Journal of Applied Mathematics
Clearly the system (16) is nonlinear in the unknowns 119871119865 and 119870 However the last two equations of (16) might beviewed as discrete Lyapunov equations of the following form
119871 = 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
(17)
119870 = 119860(119865)119879
119870119860 (119865) + 119876 (119865) (18)
The SQP method is based on minimizing successfully aquadratic program of the form
min(Δ119871Δ119865)
119902 (Δ119871 Δ119865) st ℎ (Δ119871 Δ119865) = 0 (19)
where
119902 (Δ119871 Δ119865)
= ℓ119871Δ119871 + ℓ
119865Δ119865
+1
2(ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865))
ℎ (Δ119871 Δ119865) = 119867119871(119871 119865) Δ119871 + 119867
119865(119871 119865) Δ119865 + 119867 (119871 119865)
(20)
All derivatives required for constructing this QP are given inLemma 4
An SQP method known also as Newton-Lagrangemethod generates a sequence of iterates by solving theaugmented linear system
(
nabla2
119871119871ℓ119896
nabla2
119871119865ℓ119896
nabla119871119867lowast
119896
nabla2
119865119871ℓ119896
nabla2
119865119865ℓ119896
nabla119865119867lowast
119896
nabla119871119867119896
nabla119865119867119896
0
)(
Δ119871
Δ119865
Δ119870
) = minus(
nabla119871ℓ119896
nabla119865ℓ119896
119867119896
)
(21)
and updates the step by
(119871119896+1
119865119896+1
119870119896+1
)
= (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896 119870119896+ 120572119896Δ119870119896)
(22)
where 120572 isin (0 1] is the step size
Assumption 6 Throughout this paper we make the followingassumptions
(H1) Themappings 119869 and119867 are at least twice continuouslydifferentiable
(H2) For a given (119871 119865) isin D119904the mapping nabla
119871119867(119871 119865) is
invertible(H3) There exists an (119871
0 1198650) isin D
119904 Moreover assume that
for a given (119871119896 119865119896) isin D
119904there always exists an 120572
119896gt 0
such that (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) isin D
119904
The next theoremprovides us with the linearization of thenonlinear system (16)
Theorem 7 For a given 119880 = (119871 119865 119870) isin D119904times R119899times119899 the
linearized equations of the KKT system (16) are the following
(
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119862119879
+ 119861119879
Δ119870119871119865
119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
minus Δ119871 + 119860 (119865) Δ119871119860(119865)119879
119862119879
Δ119865119879
119870119865+ 119870119879
119865Δ119865119862 minus Δ119870 + 119860(119865)
119879
Δ119870119860 (119865)
)
= minus(
119870119865119871119862119879
+ (119861119879
119870119861 + 119877)119865119877119890
minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865)
)
(23)
where119870119865and 119871
119865are as defined in Lemma 4
Proof The linearization of the nonlinear system M(119880) = 0
about the point 119880 = (119871 119865119870) in the direction of Δ119880 =
(Δ119871 Δ119865 Δ119870) takes the form
nablaM(119880)119879
Δ119880 = minusM (119880) (24)
wherenablaM(119880)119879 is the Jacobianmatrix withwhichwe directly
obtain the system (23)
Under certain assumptions it is possible to show that theSQP direction Δ119880 given by (23) is well definedThe difficultythat one faces when solving (23) is due to the fact that we donot have an explicit representation of the Jacobian of M(119880)However if we write 119880 = (119871 119865119870) as a long column vectorvec(119880) isin R119901119903+2119899
2
such that 119891(vec(119880)) = M(119880) then we areable to evaluate the Jacobian of 119891 using the basic propertiesof the Kronecker product which is an (2119899
2
+ 119901119903) times (21198992
+ 119901119903)
matrix
Theorem 8 Let 119880 = (119871 119865119870) isin D119904times R119899times119899 be given The
Jacobian matrix ofM(119880) is given by
nablaM(119880)119879
= (
(119862119871119862119879
+ 119877119890) otimes (119861
119879
119870119861 + 119877) 119862 otimes 119870119865
119871119879
119865otimes 119861119879
[119871119865otimes 119861 + 119870
119899119899(119871119865otimes 119861)] 119878
1198650
[119870119903119899(119862119879
otimes119870119879
119865)+(119862
119879
otimes119870119879
119865)] 0 119878
119879
119865
)
(25)
where119870119865and119871
119865are as defined in Lemma 4 119878
119865= minus1198681198992+119860(119865)otimes
119860(119865) and119870119898119899
is an119898119899 times119898119899 commutation matrix defined asvec(119882119879) = 119870
119903119899vec(119882) for any119898times119899matrix119882 Furthermore
the linear system (23) is explicitly written as
nablaM(119880)119879 vec (119880) = minus vec (M) (26)
Journal of Applied Mathematics 5
wherevec (M)
= (
vec (119870119865119871119862119879
+ (119861119879
119870119861 + 119877)119865119877119890)
vec (minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
)
vec (minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865))
)
(27)
Proof For any given threematrices119860119861 and119862 of appropriatedimensions the linear matrix equation
119860119883119861 = 119862 (28)
is equivalent to the explicit linear system
(119861119879
otimes 119860) vec (119883) = vec (119862) (29)
If we apply this result on the above linear system the entriesof the Jacobian matrix can be easily obtained
Indeed the last result shows that the dimension ofthe Jacobian matrix (25) can be very large because of theKronecker productsMoreover the evaluation of the Jacobianmatrix explicitly in the SQP method is unnecessary andmakes the method impractical By taking this fact in mindthe reducedHessian approach is rather considered as an idealcandidate for finding the local solution of theNSDP (10)ndash(12)see for example [2 16]
31 The Reduced Hessian Approach The reduced Hessianapproach relies on the existence of the null space and theright inverse of the Jacobian nabla119867
119879 In optimal control suchoperators are not available explicitly However it is possibleto construct them from the problem itself for more detailssee for example [2 16 25] The two operators are defined as
119885 (119871 119865) = (minus119867minus1
119871(119871 119865)119867
119865(119871 119865) 119868
119901)
(119871 119865) = (minus119867minus1
119871(119871 119865) 0)
(30)
where 119868119901and 0 are the identity and the zero operators
respectively We note that if the Jacobian nabla119867119879 is surjective
then such a right inverse exists We also note that the rangespace of119885 coincides with the null space of the Jacobian nabla119867
119879see [16 Lemma 2]
Next with the help of 119885 and the following result showsthat the linearized equality constraint is decomposed into twodiscrete Lyapunov equations
Lemma 9 Let (119871 119865) isin D119904be given and let (Δ119871 Δ119865) isin
R119899times119899+119901times119903 be the solution of the QP (19) Then the linearizedequality constraint of (19) is decomposed into the followingdiscrete Lyapunov equations
Δ119871119899
= 119860 (119865) Δ119871119899
(119860119865)119879
+ 119867 (119871 119865) (31)
Δ119871119905
= 119860 (119865) Δ119871119905
119860(119865)119879
+ 119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
(32)
where 119871119865is as given in Lemma 5
Proof (see also [16 Lemma 3]) The linearized equalityconstraint of (19) can be rewritten as
nabla119871119867(119871 119865) Δ119871
119905
+ nabla119865119867(119871 119865) Δ119865
+ nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0
(33)
where Δ119871 = Δ119871119899
+ Δ119871119905 According to the definition of 119885 and
the above equation can be decomposed as
nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0 forallΔ119871119899
119867119871(119871 119865) Δ119871
119905
(Δ119865) + 119867119865(119871 119865) Δ119865 = 0 forallΔ119865
(34)
which yield the discrete Lyapunov equations (31) and (32)respectively
Following the proof of Lemma 9 the step (Δ119871 Δ119865) thatsolves the QP (19) with the help of 119885 and is decomposed as
(Δ119871 Δ119865) = 119885 (119871 119865) Δ119865 + (119871 119865)119867 (119871 119865)
= (Δ119871119905
(Δ119865) Δ119865) + (Δ119871119899
0)
(35)
where (Δ119871119905(Δ119865) Δ119865) and (Δ119871119899
0) are the tangential and thenormal steps respectively
Consequently one can obtain the normal step (Δ119871119899
0) bysolving the discrete Lyapunov equation (31) for Δ119871119899 Havingobtained such a step component we solve the followingtangential subproblem for Δ119865
minΔ119865isinR119901times119903
120595 (Δ119865) = 119902 (Δ119871119905
(Δ119865) Δ119865)
= ⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩ + ⟨Δ119865 nabla
119865ℓ (sdot)⟩
+ ⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119899
⟩
+ ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119899
⟩
+1
2⟨Δ119865 119885
119879
nabla2
ℓ (sdot) 119885Δ119865⟩
(36)
where
⟨Δ119865 119885119879
nabla2
ℓ (sdot) 119885Δ119865⟩ = ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
+ ⟨Δ119865 nabla2
119865119865ℓ (sdot) Δ119865⟩
+ 2⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
(37)
and Δ119871119905
(Δ119865) is the corresponding solution of the discreteLyapunov equation (32)
In order to find the local solution of the minimizationproblem (36) let us apply the necessary optimality conditionswhich give the following result
Lemma 10 Let (119871 119865 119870) isin D119904times R119899times119899 and Δ119871
119899
isin R119899times119899
be given Moreover let Δ119865 isin R119901times119903 be a local minimum for
6 Journal of Applied Mathematics
the problem (36) Then Δ119865 solves the following linear matrixequation
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119905
(Δ119865)119862119879
+ 119861119879
Δ119870 (Δ119865) 119871119865
= minus119870119865(119871 + Δ119871
119899
) 119862119879
minus (119861119879
119870119861 + 119877)119865119877119890minus 119861119879
119878119871119865
(38)
where Δ119871119905(Δ119865) Δ119870(Δ119865) and 119878 respectively solve the discreteLyapunov equations (32) and
Δ119870 = 119860(119865)119879
Δ119870119860 (119865) + 119870119879
119865Δ119865119862 + 119862
119879
Δ119865119879
119870119865 (39)
119878 = 119860(119865)119879
119878119860 (119865) +119872 +119872119879
(40)
where119870119865and 119871
119865are as defined in Lemma 4 and
119872 = minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865) (41)
Proof We use the derivatives of ℓ given in Lemma 4 toconstruct 120595(Δ119865) If we differentiate 120595 with respect to Δ119865 andapply the necessary optimality conditions we obtain
119885119879
nabla2
ℓ (sdot) 119885Δ119865
= minusnabla119865ℓ (sdot) minus nabla
2
119865119871Δ119871119899
minus120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
(42)
which is another representation of (38) As an example ofevaluating these derivatives we obtain the last term of (42)as follows
120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
=120597
120597Δ119865Tr (119872Δ119871
119905
(Δ119865))
=120597
120597Δ119865Tr(119872
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865
+119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
)
= 119861119879
(
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
)119871119865
= 119861119879
119878119871119865
(43)
where
Δ119871119905
(Δ119865) =
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
119878 =
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
(44)
are the exact solutions of the discrete Lyapunov equations (32)and (40) respectively
Because of using directional derivatives the resultinglinear system (38)ndash(40) is not given explicitly Howeverone can modify the conjugate gradient (CG) method [17]and solve this system iteratively The problem structure isexploited where the partition of the unknown 119883 = (119871 119865)
is utilizedFor a given Δ119865 calculated by the CG method both of
Δ119871119905
(Δ119865) andΔ119870(Δ119865) are uniquely determined by solving thediscrete Lyapunov equations (32) and (39) respectively TheCG algorithm for solving the system (38)ndash(40) is stated in thefollowing lines wherewe use119879
119894119863119894 and119864
119894at the 119894th CG inner
iteration to denote the approximation of the step componentΔ119865 the CG direction and the residual respectively
Algorithm 11 (modified CG method) Let 119880 = (119871 119865119870) isin
D119904times R119899times119899 and Δ119871
119899 be given Moreover let 119860 119861 119862 119876 119877119877119890 and 119881 be given constant matrices Set 119879
0= 0 119864
0=
minus119870119865119871119862119879
minus (119861119879
119870119861 + 119877)119865119877119890 and 119863
0= 1198640 Choose 120578 and
120598 isin (0 1)
For 119894 = 0 1 do
(1) Solve for Δ119871119905(119863119894) and Δ119870(119863
119894) the discrete Lyapunov
equations (32) and (39) respectively(2) Calculate
119873(119863119894)
= (119861119879
119870119861 + 119877)119863119894(119862119871119862
119879
+ 119877119890)
+ 119870119865Δ119871119905
(119863119894) 119862119879
+ 119861119879
Δ119870 (119863119894) 119871119865
(45)
(3) If Tr(119863119879119894119873(119863119894)) le 120598119863
1198942 update the step Δ119865 as
follows if 119894 = 0 set Δ119865 = 1198630 else set Δ119865 = 119879
119894and
exit(4) Calculate the ratio 120579
119894= Tr(119864119879
119894119864119894)Tr(119863119879
119894119873(119863119894)) Set
119879119894+1
= 119879119894+ 120579119894119863119894and 119864
119894+1= 119864119894minus 120579119894119873(119863119894)
(5) If 119864119894+1
le 1205781198640 set Δ119865 = 119879
119894+1and exit
(6) Calculate the ratio
120573119894=Tr (119864119879119894+1
119864119894+1
)
Tr (119864119879119894119864119894)
(46)
Set119863119894+1
= 119864119894+1
+ 120573119894119863119894 119894 = 119894 + 1 and go to (1)
End (do)
There are two exits in this CGmethodThe first one takesplace when a negative or zero curvature is encountered by thecalculated search direction The second exit occurs when thenorm of the new residual is sufficiently small
Having evaluated both of Δ119871119899119896and (Δ119871
119905
(Δ119865119896) Δ119865119896) then
according to the step decomposition (35) the total step(Δ119871119896 Δ119865119896) is obtained Consequently the new iterate takes
the form
(119871119896+1
119865119896+1
) = (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) (47)
where 120572119896
gt 0 is the step size Starting from 1205720
= 1 wecalculate the step size 120572
119896by a backtracking rule (eg by
Journal of Applied Mathematics 7
halving 120572) until we satisfy the following sufficient decreasecondition
Φ120583119896 (119871119896+ 120572119896Δ119871 119865119896+ 120572119896Δ119865)
le Φ120583119896
119896+ 120591120572119896[Φ120583119896
119871(119871119896 119865119896) Δ119871 + Φ
120583119896
119865(119871119896 119865119896) Δ119865]
(48)
where 120591 isin (0 12) is a given parameter Let 119896be the achieved
step size Starting from that 119896we satisfy the following
stability condition by backtracking in the same way until an120572119896gt 0 is reached such that
119871119896+ 120572119896Δ119871119896≻ 0 119884 (119871
119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) ≻ 0
(49)
We assume that there always exists an 120572119896gt 0 such that
(48) is satisfied If 120572 is decreased and reached a lower bound120572min gt 0 without fulfilling (49) then we might follow oneof the ideas often used in modifying the Hessian matrix ofNewton-based methods see for example [17 Section 63]Let119882
119896denote any of the twomatrices 119871
119896+120572minΔ119871119896 or119884(119871119896+
120572minΔ119871119896 119865119896 + 120572minΔ119865119896) with a spectral decomposition119882119896=
119876Λ119876119879 A correction matrix Δ119882
119896of minimum Frobenius
norm that ensures 120582min(119882119896 + Δ119882119896) ge 120575 gt 0 is given by
Δ119882119896= 119876 diag (119905
119894) 119876119879
(50)
where
119905119894=
0 120582119894gt 120575
120575 minus 120582119894
otherwise(51)
The modified matrix is
119882119896+ Δ119882
119896= 119876 (Λ + diag (119905
119894)) 119876119879
(52)
where 120582min(119882119896) means the smallest eigenvalue of 119882119896 Note
that the nature of the stability constraint is an inactiveconstraint for most test problems
The Matlab function [sim 119895] = cholinc(119872) of the incom-plete Cholesky factorization can be used for checking thepositive definiteness where the indicator 119895 is used for thatpurpose On the other hand as mentioned at the end ofSection 2 we can check the stability condition via the spectralradius of the closed-loop system matrix namely 120588(119860(119865
119896+
120572119896Δ119865119896)) lt 1
We use as a merit function the following 1198971-penalty
function for globalizing the SQP method
Φ120583
(119871 119865) = 119869 (119871 119865) + 120583119867 (119871 119865)1 (53)
where 120583 gt 0 is the penalty parameter This function isdirectionally differentiable
The following update rule for the penalty parameter 120583 isconsidered (see eg [17 page 547])
120583119896=
120583119896minus1
if 120583119896minus1
ge1003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 1205741003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 2120574 otherwise(54)
where 120574 gt 0 is a given constant andΔ119870119896is obtained by solving
the discrete Lyapunov equation (39)The following algorithm demonstrates the SQP method
that finds the local solution of the NSDP (10)ndash(12)
Algorithm 12 (the method DSQP) Let (1198710 1198650 1198700) isin D
119904times
R119899times119899 be given Moreover let 119860 119861 119862 119876 119877 119877119890 and 119881 be
given constant matrices Choose 120591 isin (0 12) 120574 gt 0 and120598tol isin (0 1)
While nabla119880ℓ119896 gt 120598tol do
(1) Calculate Δ119871119899
119896solution of the discrete Lyapunov
equation (31)
(2) For a given Δ119871119899
119896calculate the local solution
(Δ119871119905
(Δ119865119896) Δ119865119896) of the problem (36) by Algorithm 11
Then set (Δ119871119896 Δ119865119896) = (Δ119871
119899
119896 0) + (Δ119871
119905
(Δ119865119896) Δ119865119896)
(3) Calculate Δ119870119896by solving (39) and then update the
penalty parameter 120583119896using (54)
(4) Starting from 1205720= 1 apply a backtracking step-size
rule that satisfies the sufficient decrease conditions(48)
(5) If (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896)) notin D
119904 then maintain the
positive definiteness of (49) as described above
(6) Set 119865119896+1
= 119865119896+ 120572119896Δ119865119896 119871119896+1
= 119871119896+ 120572119896Δ119871119896 119870119896+1
=
119870119896+ 120572119896Δ119870119896 and 119896 = 119896 + 1 then go to step (1)
End (While)
Step (5) of Algorithm 12 can also be modified as followsSet119865119896+1
= 119865119896+120572119896Δ119865119896Then obtain119871
119896+1= 119871(119865
119896+1) and119870
119896+1=
119870(119865119896+1
) by solving the discrete Lyapunov equations (17) and(18) respectively This means we project the search directionfrom the spaceD
119904to the control-variable space R119901times119903
The global convergence behavior of the method DSQP isbeyond the scope of this work However we state some of themain global convergence results which can be shown underthe following general assumptions
Assumption 13 In addition to Assumption 6 we furtherassume that the functions 119869 and 119867 together with theirderivatives are in Ω sube D
119904 We further assume that the
operator 119867minus1
119871is uniformly bounded in D
119904 furthermore
we assume that the sequences nabla2ℓ119896 119871119896 119865119896 119870119896 and
119885(119871119896 119865119896) are all bounded inΩ
The next lemma provides an upper bound for the direc-tional derivative of themerit function by the computed searchdirection
Lemma 14 Let (Δ119871 Δ119865 Δ119870) be generated by the SQP iter-ation (21) Then the directional derivative of Φ120583(119871 119865) in thedirection (Δ119871 Δ119865) satisfies
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
le minus [ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865)]
minus [120583 minus Δ119870infin] 1198671
(55)
8 Journal of Applied Mathematics
where the directional derivatives of Φ120583(119871 119865) are given by
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
= 119869119871(119871 119865) Δ119871 + 119869
119865(119871 119865) Δ119865 minus 120583119867 (119871 119865)
1
= Tr (Δ119871119876 (119865)) + 2Tr (Δ119865119879119877119865 (119862119871119862119879
+ 119877119890))
minus 120583119867 (119871 119865)1
(56)
Proof See [17 Lemma 182]
Following [17 Theorem 183] the search direction com-puted by the method DSQP is descent for the merit functionΦ
Theorem 15 Suppose that (119871119896 119865119896) isin D
119904is not a stationary
point of theNSDP (10)ndash(12) and the reducedHessian119885119896nabla2
ℓ119896119885119896
is positive definite Then the search direction (Δ119871119896 Δ119865119896) by the
method DSQP is a descent direction for the merit functionΦ if120583 is updated by (54)
4 Initial Feasible Solution
As can be seen in Algorithm 12 an initial (1198710 1198650) isin D
119904is
required to start the method DSQP Such a matrix pair canbe obtained by using any method that calculates suboptimalsolutions (see eg [21 Algorithm Fstab]) or by a pole assign-ment method see for example [18] Another alternative isto parameterize the system matrix 119860 such that 120588(119860) lt 1
and therefore 1198650can be chosen as the zero matrix Hence
according to Lemma 3 one can obtain 1198710≻ 0 by solving the
discrete Lyapunov equation (17)This idea is described in [16]and is stated herein for completeness In the parametrizationapproach one replaces the system matrix 119860 by 119860
119905= (1 minus
119905)119860 where 0 le 119905 lt 1 is a parameter Then instead ofsolving the NSDP problem (10)ndash(12) we solve the followingparameterized problem
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
st 119867119905(119871 119865) = minus119871 + 119860
119905(119865) 119871119860
119905(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
=0
119884119905(119871 119865)=119871minus(119860
119905+119861119865119862) 119871(119860
119905+119861119865119862)
119879
≻0 119871≻0
(57)
where 119860119905(119865) = 119860
119905+ 119861119865119862 and the constant matrices 119860 119861 119862
119876119877119890 and119881 are as defined in Section 2Thematrix pair (119871 119865)
must be chosen from the following parameterized set
D119905
119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884119905(119871 119865) ≻ 0 (58)
Obviously as 119905 rarr 0 the setD119905119904approaches the setD
119904
The initialization of the method DSQP can be as followsStarting from 119905
0= 0 where 119905
0isin [0 1) we choose 119905
0as the
first candidate such that 120588(1198601199050
) lt 1 and set 1198650= 0 Having
(1199050 1198650) then initial 119871
0and119870
0can be obtained by solving the
discrete Lyapunov equations
119871 = 1198601199050
(1198650) 1198711198601199050
(1198650)119879
+ 119881
119870 = 1198601199050
(1198650)119879
1198701198601199050
(1198650) + 119876
(59)
Then Algorithm 12 can be applied directly on the parame-terized problem (57) but after replacing 119860(119865) by 119860
119905(119865) The
parameter 119905 is updated in the main iteration loop accordingto the decreasing sequence 119905
119896
119905119896+1
= 119888119896119905119896 (60)
where 119888119896 darr 0 As mentioned above we choose 119905
0isin [0 1) as
the first candidate such that 120588(1198601199050
) lt 1 starting from 1199050= 0
On the other hand we might test the method DSQP forfinding feasible points of the problem (57) that is findingpoints that satisfy the equality constraints as well as thepositive definite constraints This can be achieved if we solvethe problem with zero objective function For that purposewe set the objective function and all its derivatives to bezero in Algorithm 12 As a result and with the exceptionof (15) the simplification of all formulas has no drawbackson Algorithm 12 In that case the zero term of the objectivefunction in (15) implies (18) to reduce to
119870 = 119860119905(119865)119879
119870119860119905(119865) (61)
which cannot be used in its current form to update themultiplier 119870 as suggested in Algorithm 12 because it yieldsthe trivial solution119870 = 0 In order to overcome this difficultythe multiplier is updated instead by the modified equation
119870 = 119860119905(119865)119879
119870119860119905(119865) + 119868
119899 (62)
5 Numerical Results
This section includes an implementation of the methodDSQP using Matlab Moreover the method DSQP is com-pared versus Newtonrsquos method (NM) [9] applied on theminimization problem (5)-(6) Four test problems fromthe benchmark collection COMPlib [8] are considered indetail in addition to an application of a hydraulic turbine[26] The benchmark COMPlib includes mainly continuous-time test problems Therefore the function c2d from thecontrol system toolbox of Matlab is considered to convert thecontinuous-time model to the discrete-time counterpart
For those test problems with 120588(119860) lt 1 according toLemma 3 it is possible to start the method DSQP with 119865
0= 0
and to obtain 1198710by solving the discrete Lyapunov equation
(17) However for test problems with 120588(119860) ge 1 an initial(1198710 1198650) isin D
119904is required otherwise the parametrization
approach described in Section 4 can be appliedThe functiondlyap from the control system toolbox of Matlab is usedfor calculating the approximate solutions of the discreteLyapunov equations For all test problems the tolerance is120598tol = 1 times 10
minus6 The constant weight matrices 119876 and 119877 andthe covariancematrices119881 and119877
119890are taken as the unit matrix
Journal of Applied Mathematics 9
Table 1 Convergence behavior of the method DSQP for Example16
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 31135119890 + 005 84992119890 + 007 99838119890 minus 001 02 21007119890 + 005 37773119890 + 007 99745119890 minus 001 13 14256119890 + 005 16786119890 + 007 99581119890 minus 001 1
19 15151119890 + 003 28400119890 minus 003 96853119890 minus 001 620 15151119890 + 003 76411119890 minus 005 96853119890 minus 001 621 15151119890 + 003 90844119890 minus 009 96853119890 minus 001 8
Example 16 The first test problem is a supersonic transportaircraft under Mach 27 flight condition see [8 AC16] Thediscrete-time data matrices are as follows
119860 =[[[
[
09901 00012 00000 minus00994
minus00315 10000 00989 00014
minus06269 minus00004 09773 00376
01237 00001 00016 09892
]]]
]
119861 =[[[
[
00005 00004
00004 00040
00078 00794
minus00086 minus00066
]]]
]
119862 = 1198684
(63)
Given the data matrices119860 119861 119862119876 119877 119877119890 and119881 the goal is to
calculate a local solution (119871lowast 119865lowast) isin D
119904of the NSDP problem
(10)ndash(12) using the method DSQP The corresponding 119865lowastis
considered as an approximate solution of the design problem(2)ndash(4) The open-loop system is discrete-time Schur stablebecause 120588(119860) = 09989 lt 1 Hence according to Lemma 3one can choose 119865
0= 0 and obtain 119871
0≻ 0 the corresponding
solution of the discrete Lyapunov equation (17) The twomethods NM and DSQP converge to the same local mini-mum after 25 and 21 iterations respectively Moreover wehave also tested the method DSQP for finding feasible pointsas explained at the end of Section 4 The achieved KKT andfeasible points are respectively
119865lowast= [
minus16109 01684 06795 63050
40166 minus08769 minus14994 minus29913]
119865feas = [minus1075749 88006 107506 1297845
183855 minus128539 minus139596 minus131650]
(64)
where 119871lowastand 119871 feas are the corresponding solutions of the dis-
crete Lyapunov equation (17) Table 1 shows the convergencebehavior of the method DSQP to the local solution
The method DSQP converges to a local minimum in lessnumber of iterations than the method NM for most of theconsidered test problemsThe next examples have also such abehavior
Example 17 This test problem is the discrete version of atransport aircraft model [8 AC8] The problem has the
dimensions 119899 = 9 119901 = 1 and 119903 = 5 Therefore we do notlist the data matrices 119860 119861 and 119862
The open-loop system of this example is not discrete-timeSchur stable where 120588(119860) = 10012 gt 1 The two methodsNM and DSQP are considered with the parametrizationapproach where 119905
0= 0002 and 119888
119896= (08)
119896 Both methodssuccessfully converge to the same local minimum after 21and 18 iterations respectivelyThe achieved KKT and feasiblepoints are respectively
119865lowast= [21458 minus05334 minus14506 00386 10690]
119865feas = [25640 minus06294 minus16525 00469 12302]
(65)
where 119871lowastand 119871 feas are the corresponding solutions of the
discrete Lyapunov equation (17)Table 2 shows the behavior of the two methods while
converging to the local solution The objective functions andthe convergence criteria are listed columnwise in that tableThe two methods show fast local convergence rate startingfrom 119865
0= 0
Figure 1 shows the state variables for the open- andclosed-loop systems of the current example where theachieved output feedback controller matrix 119865
lowastenforces all
state variables to decay to the zero state
Example 18 This test problem is the decentralized intercon-nected system [8 DIS3] The problem has the dimensions119899 = 8 119901 = 4 and 119903 = 4 Therefore we do not list the datamatrices 119860 119861 and 119862
The open-loop system for this example is discrete-timeSchur stable where 120588(119860) = 09620 lt 1 Starting from1198650= 0 where 119871
0is the corresponding solution of (17) the
methodDSQP successfully converges to aKKTpoint (119871lowast 119865lowast)
in 14 iterations while the method NM requires 16 iterationsto converge to the same local minimum Furthermore themethod DSQP requires 17 iterations to reach a feasible pointBoth of the KKT and the feasible points are respectively
119865lowast=[[[
[
minus17344 minus05988 minus01937 00938
02451 minus01286 04894 minus05011
00037 minus00705 minus03206 00853
00606 minus02429 minus01231 minus01806
]]]
]
119865feas =[[[
[
minus105946 minus07911 minus04047 07671
55324 minus21539 35120 minus31956
02289 minus18917 minus120235 19402
04861 minus22963 minus03051 minus20438
]]]
]
(66)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Furthermore Table 3 shows the convergence behavior of themethod DSQP to the local solution (119871
lowast 119865lowast) isin D
119904
Example 19 This test problem represents a nuclear reactormodel [8 REA3]The dimensions of this example are 119899 = 12119901 = 1 and 119903 = 3 Therefore we skip listing the data matrices119860 119861 and 119862
The open-loop system for this example is not discrete-time Schur stable By applying the parametrization approach
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Journal of Applied Mathematics
to the continuous-time SOF design problem For instanceApkarian et al [12] introduced a linear matrix inequalityapproach for the119867
2synthesis problem Leibfritz andMostafa
[13] proposed two trust region methods for two differentformulations of the continuous-time SOF problem Mostafa[14 15] developed a trust regionmethod for the decentralizedSOF problem and an augmented Lagrangian SQP methodfor the continuous-time SOF problem respectively Morerecently Mostafa [16] introduced a trust region method for aparticular constrained optimization problem that originatesfrom the discrete-time SOF problem
In the current work a different formulation of the designproblem is considered that underlies the NSDP problemformulation (1) In fact such an NSDP problem can beseen as a generalization of the matrix optimization problemintroduced by Makila [11] The goal is to study and analyzean SQP method with line search for finding a local solutionof such an NSDP problem The reduced Hessian with a stepdecomposition approach (see eg [17]) is employed withthe SQP method Moreover we compare the SQP methodnumerically versusNewtonrsquosmethod proposed byMakila andToivonen [9] but applied on thematrix optimization problem[11] As is well known SQP methods are among the mosteffective techniques for nonlinear constrained optimizationproblems see for example [17] In particular the problemstructure is exploited with the considered method
The existence of an initial feasible point 1198830
= (1198710 1198650)
with respect to the positive definite constraints is necessaryto start the iteration sequence of the SQP method Such aninitial feasible point can be easy to find in simple problemsbut can be difficult or very time consuming for moderate andcomplex problems A parametrization approach is employedon the NSDP problem that overcomes this difficulty
This paper is organized as follows In the next sectionthe discrete-time SOF problem is introduced and the relatedNSDP problem is stated In Section 3 the SQP method thatfinds a local solution of the NSDP is presented Section 4 isdevoted to overcome the difficulty of finding an initial feasiblepoint (119871
0 1198650) to start the iteration sequence of the SQP
method In order to demonstrate the considered approachwe have tested in Section 5 the SQP method on various testproblems derived from benchmark collection [8]
Notations For a matrix 119866 isin R119899times119899 the notation 119866 ≻ 0 (119866 ⪰ 0)denotes that 119866 is strictly positive (semi)definite The symbolotimes denotes the Kronecker product of two matrices and ⟨sdot sdot⟩
denotes the inner product operator Throughout the paper sdot is the Frobenius norm otherwise it will be mentionedMoreover 119868
119899denotes the identity matrix of order 119899 We omit
the argument when it is known from the context for examplewe use 119869
119896to denote 119869(119883
119896)
2 The Static Output FeedbackControl Problem
The problem of designing an optimal output feedback con-troller for discrete-time control systems is an important and
extensively studied topic in system and control literature seefor example the two survey papers by Makila and Toivonen[9] and Syrmos et al [18] and numerous references thereinincludingGarcia et al [19] Lee andKhargonekar [20]Makila[11] Mostafa [21 22] and Sulikowski et al [23]
Consider the linear time-invariant control systemdescribed by the following discrete time state-spacerealization
119909119896+1
= 119860119909119896+ 119861119906119896+ V119896 119910119896= 119862119909119896+ 119890119896 119896 ge 0 (2)
where 119909119896
isin R119899 is the state vector 119906119896
isin R119901 is the control(input) vector 119910
119896isin R119903 is the measured output vector and
V119896isin R119899 and 119890
119896isin R119903 are disturbance (noise) terms Moreover
119860 119861 and 119862 are given constant matrices of appropriatedimensions
We will consider the following quadratic cost function asan objective function to be minimized
119869 = E[
infin
sum
119896=0
⟨119909119896 119876119909119896⟩ + ⟨119906
119896 119877119906119896⟩] (3)
where E[sdot] is the expected value and 119876 isin R119899times119899 and 119877 isin R119901times119901
are given constant weight matricesThe following control law is often used to close the above
control system
119906119896= 119865119910119896 (4)
where 119865 isin R119901times119903 is the output feedback gain matrixrepresenting the unknown
In order to remove the dependency of the problem onthe initial state vector 119909
0the following assumption is often
imposed
Assumption 1 Assume that1199090is a randomvariable uniformly
distributed over the unit ball such that E[1199090] = 0
Under this assumption the optimal control problem (2)ndash(4) can be transformed into the matrix optimization problem(see [11])
min119865
119869 (119865) = 119869 (119871 (119865) 119865)
= Tr (119871 (119865) (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
(5)
where Tr(sdot) is the trace operator and 119871(119865) solves the discreteLyapunov equation
119871 (119865) = (119860 + 119861119865119862) 119871 (119865) (119860 + 119861119865119862)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
(6)
Assumption 2 Throughout the paper we assume that 119860 isin
R119899times119899 119861 isin R119899times119901 and 119862 isin R119903times119899 are given constant matricesFurthermore we assume that 119876 isin R119899times119899 and 119877 isin R119901times119901 aregiven constant weight matrices and 119877
119890isin R119903times119903 and 119881 isin R119899times119899
are given covariance matrices We assume that 119876 ⪰ 0 while119877 119877119890and 119881 ≻ 0
Journal of Applied Mathematics 3
From Lyapunov stability theory the unknown 119865 must bechosen from the following set
S119865= 119865 isin R
119901times119903
120588 (119860 + 119861119865119862) lt 1 (7)
where 120588(sdot) is the spectral radius This restriction is requiredultimately to guarantee the existence of a unique solution ofthe discrete Lyapunov equation (6) see for example [24]Moreover from the Lyapunov stability theory the next lemmagives an equivalence between the asymptotic stability of thesystem (2) and fulfilling two positive definite constraints
Lemma 3 ([24 Lemma 5719]) Consider the SOF problem(2)ndash(4) An119865 isin S
119865exists if and only if there exists (119871 119865) isin D
119904
where
D119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884 (119871 119865) ≻ 0 (8)
where
119884 (119871 119865) = 119871 minus (119860 + 119861119865119862) 119871(119860 + 119861119865119862)119879
(9)
According to Lemma 3 and by considering both of 119871
and 119865 as independent variables where we skip the imposeddependency of 119871 on 119865 that was considered in (5)-(6) then theminimization problem can be stated as the following NSDP
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
(10)
st 119867 (119871 119865) = minus 119871 + (119860 + 119861119865119862) 119871(119860 + 119861119865119862)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
= 0
(11)
119884 (119871 119865) ≻ 0 119871 ≻ 0 (12)
Instead of considering (5)ndash(7) we would rather considerthe constrained minimization problem (10)ndash(12) which canbe seen as a generalization of the former problem Theequivalence between the stability condition (7) and thepositive definite constraints of (8) provides a straightforwardidea to fulfill such a constraint within the numerical algo-rithm explicitly There are however different alternatives tohandle the positive definite constraints within a numericalalgorithm First onemight incorporate those positive definiteterms within the objective function and apply an interior-point technique on the corresponding constrained problemsee [2] We might also use slack matrix variables for theinequality constraintsThen one solves the problemwith onlyequality constraints
We end this section by noting that the two sets S119865and
D119904are open Therefore it is convenient to replace them by
the two subsets Ω andΩ respectively where both subsets areassumed to be compact For example the level set
Ω = 119865 isin S119865 119869 (119865) le 119869 (119865
0) sube S
119865(13)
is compact see [9]
3 An SQP Method for the Design Problem
Let us consider the minimization problem (10)ndash(12) TheLagrangian function associated with the equality constraintis defined as
ℓ (119871 119865 119870) = 119869 (119871 119865) + ⟨119870119867 (119871 119865)⟩ (14)
where 119870 isin R119899times119899 is the Lagrange multiplier The next lemmaincludes first- and second-order derivatives of ℓ and firstderivatives of the function119867 Similar results can be found in[16 Lemma 21] but on a simpler problem In the followingdiscussion we denote 119860(119865) = 119860 + 119861119865119862 and 119876(119865) = 119876 +
119862119879
119865119879
119877119865119862
Lemma 4 Consider the NSDP problem (10)ndash(12) TheLagrangian function ℓ(119871 119865119870) is twice continuously differen-tiable and its first- and second-order directional derivatives aswell as first-order derivatives of the constraint function 119867 arethe following
ℓ119871(sdot) Δ119871 = Tr ((119860(119865)119879119870119860 (119865) + 119876 (119865) minus 119870)Δ119871)
ℓ119865(sdot) Δ119865 = Tr (2119870
119865119871119862119879
Δ119865119879
+2 (119861119879
119870119861 + 119877)119865119877119890Δ119865119879
)
ℓ119871119871
(sdot) (Δ119871 Δ119871) = 0
ℓ119871119865
(sdot) (Δ119871 Δ119865) = ℓ119865119871
(119871 119865 119870) (Δ119865 Δ119871)
= Tr (2119870119865Δ119871119862119879
Δ119865119879
)
ℓ119865119865
(sdot) (Δ119865 Δ119865) = Tr (2 (119861119879119870119861+119877)Δ119865 (119862119871119862119879
+119877119890) Δ119865119879
)
119867119871(sdot) Δ119871 = ⟨Δ119871 nabla
119871119867(sdot)⟩ = Δ119871 minus 119860 (119865) Δ119871119860(119865)
119879
119867119865(sdot) Δ119865 = ⟨Δ119865 nabla
119865119867(sdot)⟩ = 119861Δ119865119871
119879
119865+ 119871119865Δ119865119879
119861119879
(15)
where119870119865= 119861119879
119870119860(119865) + 119877119865119862 and 119871119865= 119860(119865)119871119862
119879
+ 119861119865119877119890
Proof By using the directional derivatives with both of ℓ and119867 the above derivatives are obtained
The Karush-Kuhn-Tucker (KKT) optimality conditionsyield a nonlinear system of matrix equations as given in thenext lemma
Lemma 5 (see eg [7 Section 5]) Let (119871 119865) isin D119904be a local
minimizer of the problem (10)ndash(12) and let (10)ndash(12) be regularat (119871 119865) Then there exists a Lagrange multiplier 119870 isin R119899times119899
satisfying with 119871 and 119865 the following KKT conditions
M (119880) = (
2119870119865119871119862119879
+ 2 (119861119879
119870119861 + 119877)119865119877119890
minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865)
)
= 0
(16)
where 119870119865is as defined in Lemma 4 and 119880 = (119871 119865119870) isin D
119904times
R119899times119899
4 Journal of Applied Mathematics
Clearly the system (16) is nonlinear in the unknowns 119871119865 and 119870 However the last two equations of (16) might beviewed as discrete Lyapunov equations of the following form
119871 = 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
(17)
119870 = 119860(119865)119879
119870119860 (119865) + 119876 (119865) (18)
The SQP method is based on minimizing successfully aquadratic program of the form
min(Δ119871Δ119865)
119902 (Δ119871 Δ119865) st ℎ (Δ119871 Δ119865) = 0 (19)
where
119902 (Δ119871 Δ119865)
= ℓ119871Δ119871 + ℓ
119865Δ119865
+1
2(ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865))
ℎ (Δ119871 Δ119865) = 119867119871(119871 119865) Δ119871 + 119867
119865(119871 119865) Δ119865 + 119867 (119871 119865)
(20)
All derivatives required for constructing this QP are given inLemma 4
An SQP method known also as Newton-Lagrangemethod generates a sequence of iterates by solving theaugmented linear system
(
nabla2
119871119871ℓ119896
nabla2
119871119865ℓ119896
nabla119871119867lowast
119896
nabla2
119865119871ℓ119896
nabla2
119865119865ℓ119896
nabla119865119867lowast
119896
nabla119871119867119896
nabla119865119867119896
0
)(
Δ119871
Δ119865
Δ119870
) = minus(
nabla119871ℓ119896
nabla119865ℓ119896
119867119896
)
(21)
and updates the step by
(119871119896+1
119865119896+1
119870119896+1
)
= (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896 119870119896+ 120572119896Δ119870119896)
(22)
where 120572 isin (0 1] is the step size
Assumption 6 Throughout this paper we make the followingassumptions
(H1) Themappings 119869 and119867 are at least twice continuouslydifferentiable
(H2) For a given (119871 119865) isin D119904the mapping nabla
119871119867(119871 119865) is
invertible(H3) There exists an (119871
0 1198650) isin D
119904 Moreover assume that
for a given (119871119896 119865119896) isin D
119904there always exists an 120572
119896gt 0
such that (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) isin D
119904
The next theoremprovides us with the linearization of thenonlinear system (16)
Theorem 7 For a given 119880 = (119871 119865 119870) isin D119904times R119899times119899 the
linearized equations of the KKT system (16) are the following
(
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119862119879
+ 119861119879
Δ119870119871119865
119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
minus Δ119871 + 119860 (119865) Δ119871119860(119865)119879
119862119879
Δ119865119879
119870119865+ 119870119879
119865Δ119865119862 minus Δ119870 + 119860(119865)
119879
Δ119870119860 (119865)
)
= minus(
119870119865119871119862119879
+ (119861119879
119870119861 + 119877)119865119877119890
minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865)
)
(23)
where119870119865and 119871
119865are as defined in Lemma 4
Proof The linearization of the nonlinear system M(119880) = 0
about the point 119880 = (119871 119865119870) in the direction of Δ119880 =
(Δ119871 Δ119865 Δ119870) takes the form
nablaM(119880)119879
Δ119880 = minusM (119880) (24)
wherenablaM(119880)119879 is the Jacobianmatrix withwhichwe directly
obtain the system (23)
Under certain assumptions it is possible to show that theSQP direction Δ119880 given by (23) is well definedThe difficultythat one faces when solving (23) is due to the fact that we donot have an explicit representation of the Jacobian of M(119880)However if we write 119880 = (119871 119865119870) as a long column vectorvec(119880) isin R119901119903+2119899
2
such that 119891(vec(119880)) = M(119880) then we areable to evaluate the Jacobian of 119891 using the basic propertiesof the Kronecker product which is an (2119899
2
+ 119901119903) times (21198992
+ 119901119903)
matrix
Theorem 8 Let 119880 = (119871 119865119870) isin D119904times R119899times119899 be given The
Jacobian matrix ofM(119880) is given by
nablaM(119880)119879
= (
(119862119871119862119879
+ 119877119890) otimes (119861
119879
119870119861 + 119877) 119862 otimes 119870119865
119871119879
119865otimes 119861119879
[119871119865otimes 119861 + 119870
119899119899(119871119865otimes 119861)] 119878
1198650
[119870119903119899(119862119879
otimes119870119879
119865)+(119862
119879
otimes119870119879
119865)] 0 119878
119879
119865
)
(25)
where119870119865and119871
119865are as defined in Lemma 4 119878
119865= minus1198681198992+119860(119865)otimes
119860(119865) and119870119898119899
is an119898119899 times119898119899 commutation matrix defined asvec(119882119879) = 119870
119903119899vec(119882) for any119898times119899matrix119882 Furthermore
the linear system (23) is explicitly written as
nablaM(119880)119879 vec (119880) = minus vec (M) (26)
Journal of Applied Mathematics 5
wherevec (M)
= (
vec (119870119865119871119862119879
+ (119861119879
119870119861 + 119877)119865119877119890)
vec (minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
)
vec (minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865))
)
(27)
Proof For any given threematrices119860119861 and119862 of appropriatedimensions the linear matrix equation
119860119883119861 = 119862 (28)
is equivalent to the explicit linear system
(119861119879
otimes 119860) vec (119883) = vec (119862) (29)
If we apply this result on the above linear system the entriesof the Jacobian matrix can be easily obtained
Indeed the last result shows that the dimension ofthe Jacobian matrix (25) can be very large because of theKronecker productsMoreover the evaluation of the Jacobianmatrix explicitly in the SQP method is unnecessary andmakes the method impractical By taking this fact in mindthe reducedHessian approach is rather considered as an idealcandidate for finding the local solution of theNSDP (10)ndash(12)see for example [2 16]
31 The Reduced Hessian Approach The reduced Hessianapproach relies on the existence of the null space and theright inverse of the Jacobian nabla119867
119879 In optimal control suchoperators are not available explicitly However it is possibleto construct them from the problem itself for more detailssee for example [2 16 25] The two operators are defined as
119885 (119871 119865) = (minus119867minus1
119871(119871 119865)119867
119865(119871 119865) 119868
119901)
(119871 119865) = (minus119867minus1
119871(119871 119865) 0)
(30)
where 119868119901and 0 are the identity and the zero operators
respectively We note that if the Jacobian nabla119867119879 is surjective
then such a right inverse exists We also note that the rangespace of119885 coincides with the null space of the Jacobian nabla119867
119879see [16 Lemma 2]
Next with the help of 119885 and the following result showsthat the linearized equality constraint is decomposed into twodiscrete Lyapunov equations
Lemma 9 Let (119871 119865) isin D119904be given and let (Δ119871 Δ119865) isin
R119899times119899+119901times119903 be the solution of the QP (19) Then the linearizedequality constraint of (19) is decomposed into the followingdiscrete Lyapunov equations
Δ119871119899
= 119860 (119865) Δ119871119899
(119860119865)119879
+ 119867 (119871 119865) (31)
Δ119871119905
= 119860 (119865) Δ119871119905
119860(119865)119879
+ 119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
(32)
where 119871119865is as given in Lemma 5
Proof (see also [16 Lemma 3]) The linearized equalityconstraint of (19) can be rewritten as
nabla119871119867(119871 119865) Δ119871
119905
+ nabla119865119867(119871 119865) Δ119865
+ nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0
(33)
where Δ119871 = Δ119871119899
+ Δ119871119905 According to the definition of 119885 and
the above equation can be decomposed as
nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0 forallΔ119871119899
119867119871(119871 119865) Δ119871
119905
(Δ119865) + 119867119865(119871 119865) Δ119865 = 0 forallΔ119865
(34)
which yield the discrete Lyapunov equations (31) and (32)respectively
Following the proof of Lemma 9 the step (Δ119871 Δ119865) thatsolves the QP (19) with the help of 119885 and is decomposed as
(Δ119871 Δ119865) = 119885 (119871 119865) Δ119865 + (119871 119865)119867 (119871 119865)
= (Δ119871119905
(Δ119865) Δ119865) + (Δ119871119899
0)
(35)
where (Δ119871119905(Δ119865) Δ119865) and (Δ119871119899
0) are the tangential and thenormal steps respectively
Consequently one can obtain the normal step (Δ119871119899
0) bysolving the discrete Lyapunov equation (31) for Δ119871119899 Havingobtained such a step component we solve the followingtangential subproblem for Δ119865
minΔ119865isinR119901times119903
120595 (Δ119865) = 119902 (Δ119871119905
(Δ119865) Δ119865)
= ⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩ + ⟨Δ119865 nabla
119865ℓ (sdot)⟩
+ ⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119899
⟩
+ ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119899
⟩
+1
2⟨Δ119865 119885
119879
nabla2
ℓ (sdot) 119885Δ119865⟩
(36)
where
⟨Δ119865 119885119879
nabla2
ℓ (sdot) 119885Δ119865⟩ = ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
+ ⟨Δ119865 nabla2
119865119865ℓ (sdot) Δ119865⟩
+ 2⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
(37)
and Δ119871119905
(Δ119865) is the corresponding solution of the discreteLyapunov equation (32)
In order to find the local solution of the minimizationproblem (36) let us apply the necessary optimality conditionswhich give the following result
Lemma 10 Let (119871 119865 119870) isin D119904times R119899times119899 and Δ119871
119899
isin R119899times119899
be given Moreover let Δ119865 isin R119901times119903 be a local minimum for
6 Journal of Applied Mathematics
the problem (36) Then Δ119865 solves the following linear matrixequation
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119905
(Δ119865)119862119879
+ 119861119879
Δ119870 (Δ119865) 119871119865
= minus119870119865(119871 + Δ119871
119899
) 119862119879
minus (119861119879
119870119861 + 119877)119865119877119890minus 119861119879
119878119871119865
(38)
where Δ119871119905(Δ119865) Δ119870(Δ119865) and 119878 respectively solve the discreteLyapunov equations (32) and
Δ119870 = 119860(119865)119879
Δ119870119860 (119865) + 119870119879
119865Δ119865119862 + 119862
119879
Δ119865119879
119870119865 (39)
119878 = 119860(119865)119879
119878119860 (119865) +119872 +119872119879
(40)
where119870119865and 119871
119865are as defined in Lemma 4 and
119872 = minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865) (41)
Proof We use the derivatives of ℓ given in Lemma 4 toconstruct 120595(Δ119865) If we differentiate 120595 with respect to Δ119865 andapply the necessary optimality conditions we obtain
119885119879
nabla2
ℓ (sdot) 119885Δ119865
= minusnabla119865ℓ (sdot) minus nabla
2
119865119871Δ119871119899
minus120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
(42)
which is another representation of (38) As an example ofevaluating these derivatives we obtain the last term of (42)as follows
120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
=120597
120597Δ119865Tr (119872Δ119871
119905
(Δ119865))
=120597
120597Δ119865Tr(119872
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865
+119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
)
= 119861119879
(
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
)119871119865
= 119861119879
119878119871119865
(43)
where
Δ119871119905
(Δ119865) =
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
119878 =
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
(44)
are the exact solutions of the discrete Lyapunov equations (32)and (40) respectively
Because of using directional derivatives the resultinglinear system (38)ndash(40) is not given explicitly Howeverone can modify the conjugate gradient (CG) method [17]and solve this system iteratively The problem structure isexploited where the partition of the unknown 119883 = (119871 119865)
is utilizedFor a given Δ119865 calculated by the CG method both of
Δ119871119905
(Δ119865) andΔ119870(Δ119865) are uniquely determined by solving thediscrete Lyapunov equations (32) and (39) respectively TheCG algorithm for solving the system (38)ndash(40) is stated in thefollowing lines wherewe use119879
119894119863119894 and119864
119894at the 119894th CG inner
iteration to denote the approximation of the step componentΔ119865 the CG direction and the residual respectively
Algorithm 11 (modified CG method) Let 119880 = (119871 119865119870) isin
D119904times R119899times119899 and Δ119871
119899 be given Moreover let 119860 119861 119862 119876 119877119877119890 and 119881 be given constant matrices Set 119879
0= 0 119864
0=
minus119870119865119871119862119879
minus (119861119879
119870119861 + 119877)119865119877119890 and 119863
0= 1198640 Choose 120578 and
120598 isin (0 1)
For 119894 = 0 1 do
(1) Solve for Δ119871119905(119863119894) and Δ119870(119863
119894) the discrete Lyapunov
equations (32) and (39) respectively(2) Calculate
119873(119863119894)
= (119861119879
119870119861 + 119877)119863119894(119862119871119862
119879
+ 119877119890)
+ 119870119865Δ119871119905
(119863119894) 119862119879
+ 119861119879
Δ119870 (119863119894) 119871119865
(45)
(3) If Tr(119863119879119894119873(119863119894)) le 120598119863
1198942 update the step Δ119865 as
follows if 119894 = 0 set Δ119865 = 1198630 else set Δ119865 = 119879
119894and
exit(4) Calculate the ratio 120579
119894= Tr(119864119879
119894119864119894)Tr(119863119879
119894119873(119863119894)) Set
119879119894+1
= 119879119894+ 120579119894119863119894and 119864
119894+1= 119864119894minus 120579119894119873(119863119894)
(5) If 119864119894+1
le 1205781198640 set Δ119865 = 119879
119894+1and exit
(6) Calculate the ratio
120573119894=Tr (119864119879119894+1
119864119894+1
)
Tr (119864119879119894119864119894)
(46)
Set119863119894+1
= 119864119894+1
+ 120573119894119863119894 119894 = 119894 + 1 and go to (1)
End (do)
There are two exits in this CGmethodThe first one takesplace when a negative or zero curvature is encountered by thecalculated search direction The second exit occurs when thenorm of the new residual is sufficiently small
Having evaluated both of Δ119871119899119896and (Δ119871
119905
(Δ119865119896) Δ119865119896) then
according to the step decomposition (35) the total step(Δ119871119896 Δ119865119896) is obtained Consequently the new iterate takes
the form
(119871119896+1
119865119896+1
) = (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) (47)
where 120572119896
gt 0 is the step size Starting from 1205720
= 1 wecalculate the step size 120572
119896by a backtracking rule (eg by
Journal of Applied Mathematics 7
halving 120572) until we satisfy the following sufficient decreasecondition
Φ120583119896 (119871119896+ 120572119896Δ119871 119865119896+ 120572119896Δ119865)
le Φ120583119896
119896+ 120591120572119896[Φ120583119896
119871(119871119896 119865119896) Δ119871 + Φ
120583119896
119865(119871119896 119865119896) Δ119865]
(48)
where 120591 isin (0 12) is a given parameter Let 119896be the achieved
step size Starting from that 119896we satisfy the following
stability condition by backtracking in the same way until an120572119896gt 0 is reached such that
119871119896+ 120572119896Δ119871119896≻ 0 119884 (119871
119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) ≻ 0
(49)
We assume that there always exists an 120572119896gt 0 such that
(48) is satisfied If 120572 is decreased and reached a lower bound120572min gt 0 without fulfilling (49) then we might follow oneof the ideas often used in modifying the Hessian matrix ofNewton-based methods see for example [17 Section 63]Let119882
119896denote any of the twomatrices 119871
119896+120572minΔ119871119896 or119884(119871119896+
120572minΔ119871119896 119865119896 + 120572minΔ119865119896) with a spectral decomposition119882119896=
119876Λ119876119879 A correction matrix Δ119882
119896of minimum Frobenius
norm that ensures 120582min(119882119896 + Δ119882119896) ge 120575 gt 0 is given by
Δ119882119896= 119876 diag (119905
119894) 119876119879
(50)
where
119905119894=
0 120582119894gt 120575
120575 minus 120582119894
otherwise(51)
The modified matrix is
119882119896+ Δ119882
119896= 119876 (Λ + diag (119905
119894)) 119876119879
(52)
where 120582min(119882119896) means the smallest eigenvalue of 119882119896 Note
that the nature of the stability constraint is an inactiveconstraint for most test problems
The Matlab function [sim 119895] = cholinc(119872) of the incom-plete Cholesky factorization can be used for checking thepositive definiteness where the indicator 119895 is used for thatpurpose On the other hand as mentioned at the end ofSection 2 we can check the stability condition via the spectralradius of the closed-loop system matrix namely 120588(119860(119865
119896+
120572119896Δ119865119896)) lt 1
We use as a merit function the following 1198971-penalty
function for globalizing the SQP method
Φ120583
(119871 119865) = 119869 (119871 119865) + 120583119867 (119871 119865)1 (53)
where 120583 gt 0 is the penalty parameter This function isdirectionally differentiable
The following update rule for the penalty parameter 120583 isconsidered (see eg [17 page 547])
120583119896=
120583119896minus1
if 120583119896minus1
ge1003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 1205741003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 2120574 otherwise(54)
where 120574 gt 0 is a given constant andΔ119870119896is obtained by solving
the discrete Lyapunov equation (39)The following algorithm demonstrates the SQP method
that finds the local solution of the NSDP (10)ndash(12)
Algorithm 12 (the method DSQP) Let (1198710 1198650 1198700) isin D
119904times
R119899times119899 be given Moreover let 119860 119861 119862 119876 119877 119877119890 and 119881 be
given constant matrices Choose 120591 isin (0 12) 120574 gt 0 and120598tol isin (0 1)
While nabla119880ℓ119896 gt 120598tol do
(1) Calculate Δ119871119899
119896solution of the discrete Lyapunov
equation (31)
(2) For a given Δ119871119899
119896calculate the local solution
(Δ119871119905
(Δ119865119896) Δ119865119896) of the problem (36) by Algorithm 11
Then set (Δ119871119896 Δ119865119896) = (Δ119871
119899
119896 0) + (Δ119871
119905
(Δ119865119896) Δ119865119896)
(3) Calculate Δ119870119896by solving (39) and then update the
penalty parameter 120583119896using (54)
(4) Starting from 1205720= 1 apply a backtracking step-size
rule that satisfies the sufficient decrease conditions(48)
(5) If (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896)) notin D
119904 then maintain the
positive definiteness of (49) as described above
(6) Set 119865119896+1
= 119865119896+ 120572119896Δ119865119896 119871119896+1
= 119871119896+ 120572119896Δ119871119896 119870119896+1
=
119870119896+ 120572119896Δ119870119896 and 119896 = 119896 + 1 then go to step (1)
End (While)
Step (5) of Algorithm 12 can also be modified as followsSet119865119896+1
= 119865119896+120572119896Δ119865119896Then obtain119871
119896+1= 119871(119865
119896+1) and119870
119896+1=
119870(119865119896+1
) by solving the discrete Lyapunov equations (17) and(18) respectively This means we project the search directionfrom the spaceD
119904to the control-variable space R119901times119903
The global convergence behavior of the method DSQP isbeyond the scope of this work However we state some of themain global convergence results which can be shown underthe following general assumptions
Assumption 13 In addition to Assumption 6 we furtherassume that the functions 119869 and 119867 together with theirderivatives are in Ω sube D
119904 We further assume that the
operator 119867minus1
119871is uniformly bounded in D
119904 furthermore
we assume that the sequences nabla2ℓ119896 119871119896 119865119896 119870119896 and
119885(119871119896 119865119896) are all bounded inΩ
The next lemma provides an upper bound for the direc-tional derivative of themerit function by the computed searchdirection
Lemma 14 Let (Δ119871 Δ119865 Δ119870) be generated by the SQP iter-ation (21) Then the directional derivative of Φ120583(119871 119865) in thedirection (Δ119871 Δ119865) satisfies
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
le minus [ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865)]
minus [120583 minus Δ119870infin] 1198671
(55)
8 Journal of Applied Mathematics
where the directional derivatives of Φ120583(119871 119865) are given by
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
= 119869119871(119871 119865) Δ119871 + 119869
119865(119871 119865) Δ119865 minus 120583119867 (119871 119865)
1
= Tr (Δ119871119876 (119865)) + 2Tr (Δ119865119879119877119865 (119862119871119862119879
+ 119877119890))
minus 120583119867 (119871 119865)1
(56)
Proof See [17 Lemma 182]
Following [17 Theorem 183] the search direction com-puted by the method DSQP is descent for the merit functionΦ
Theorem 15 Suppose that (119871119896 119865119896) isin D
119904is not a stationary
point of theNSDP (10)ndash(12) and the reducedHessian119885119896nabla2
ℓ119896119885119896
is positive definite Then the search direction (Δ119871119896 Δ119865119896) by the
method DSQP is a descent direction for the merit functionΦ if120583 is updated by (54)
4 Initial Feasible Solution
As can be seen in Algorithm 12 an initial (1198710 1198650) isin D
119904is
required to start the method DSQP Such a matrix pair canbe obtained by using any method that calculates suboptimalsolutions (see eg [21 Algorithm Fstab]) or by a pole assign-ment method see for example [18] Another alternative isto parameterize the system matrix 119860 such that 120588(119860) lt 1
and therefore 1198650can be chosen as the zero matrix Hence
according to Lemma 3 one can obtain 1198710≻ 0 by solving the
discrete Lyapunov equation (17)This idea is described in [16]and is stated herein for completeness In the parametrizationapproach one replaces the system matrix 119860 by 119860
119905= (1 minus
119905)119860 where 0 le 119905 lt 1 is a parameter Then instead ofsolving the NSDP problem (10)ndash(12) we solve the followingparameterized problem
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
st 119867119905(119871 119865) = minus119871 + 119860
119905(119865) 119871119860
119905(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
=0
119884119905(119871 119865)=119871minus(119860
119905+119861119865119862) 119871(119860
119905+119861119865119862)
119879
≻0 119871≻0
(57)
where 119860119905(119865) = 119860
119905+ 119861119865119862 and the constant matrices 119860 119861 119862
119876119877119890 and119881 are as defined in Section 2Thematrix pair (119871 119865)
must be chosen from the following parameterized set
D119905
119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884119905(119871 119865) ≻ 0 (58)
Obviously as 119905 rarr 0 the setD119905119904approaches the setD
119904
The initialization of the method DSQP can be as followsStarting from 119905
0= 0 where 119905
0isin [0 1) we choose 119905
0as the
first candidate such that 120588(1198601199050
) lt 1 and set 1198650= 0 Having
(1199050 1198650) then initial 119871
0and119870
0can be obtained by solving the
discrete Lyapunov equations
119871 = 1198601199050
(1198650) 1198711198601199050
(1198650)119879
+ 119881
119870 = 1198601199050
(1198650)119879
1198701198601199050
(1198650) + 119876
(59)
Then Algorithm 12 can be applied directly on the parame-terized problem (57) but after replacing 119860(119865) by 119860
119905(119865) The
parameter 119905 is updated in the main iteration loop accordingto the decreasing sequence 119905
119896
119905119896+1
= 119888119896119905119896 (60)
where 119888119896 darr 0 As mentioned above we choose 119905
0isin [0 1) as
the first candidate such that 120588(1198601199050
) lt 1 starting from 1199050= 0
On the other hand we might test the method DSQP forfinding feasible points of the problem (57) that is findingpoints that satisfy the equality constraints as well as thepositive definite constraints This can be achieved if we solvethe problem with zero objective function For that purposewe set the objective function and all its derivatives to bezero in Algorithm 12 As a result and with the exceptionof (15) the simplification of all formulas has no drawbackson Algorithm 12 In that case the zero term of the objectivefunction in (15) implies (18) to reduce to
119870 = 119860119905(119865)119879
119870119860119905(119865) (61)
which cannot be used in its current form to update themultiplier 119870 as suggested in Algorithm 12 because it yieldsthe trivial solution119870 = 0 In order to overcome this difficultythe multiplier is updated instead by the modified equation
119870 = 119860119905(119865)119879
119870119860119905(119865) + 119868
119899 (62)
5 Numerical Results
This section includes an implementation of the methodDSQP using Matlab Moreover the method DSQP is com-pared versus Newtonrsquos method (NM) [9] applied on theminimization problem (5)-(6) Four test problems fromthe benchmark collection COMPlib [8] are considered indetail in addition to an application of a hydraulic turbine[26] The benchmark COMPlib includes mainly continuous-time test problems Therefore the function c2d from thecontrol system toolbox of Matlab is considered to convert thecontinuous-time model to the discrete-time counterpart
For those test problems with 120588(119860) lt 1 according toLemma 3 it is possible to start the method DSQP with 119865
0= 0
and to obtain 1198710by solving the discrete Lyapunov equation
(17) However for test problems with 120588(119860) ge 1 an initial(1198710 1198650) isin D
119904is required otherwise the parametrization
approach described in Section 4 can be appliedThe functiondlyap from the control system toolbox of Matlab is usedfor calculating the approximate solutions of the discreteLyapunov equations For all test problems the tolerance is120598tol = 1 times 10
minus6 The constant weight matrices 119876 and 119877 andthe covariancematrices119881 and119877
119890are taken as the unit matrix
Journal of Applied Mathematics 9
Table 1 Convergence behavior of the method DSQP for Example16
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 31135119890 + 005 84992119890 + 007 99838119890 minus 001 02 21007119890 + 005 37773119890 + 007 99745119890 minus 001 13 14256119890 + 005 16786119890 + 007 99581119890 minus 001 1
19 15151119890 + 003 28400119890 minus 003 96853119890 minus 001 620 15151119890 + 003 76411119890 minus 005 96853119890 minus 001 621 15151119890 + 003 90844119890 minus 009 96853119890 minus 001 8
Example 16 The first test problem is a supersonic transportaircraft under Mach 27 flight condition see [8 AC16] Thediscrete-time data matrices are as follows
119860 =[[[
[
09901 00012 00000 minus00994
minus00315 10000 00989 00014
minus06269 minus00004 09773 00376
01237 00001 00016 09892
]]]
]
119861 =[[[
[
00005 00004
00004 00040
00078 00794
minus00086 minus00066
]]]
]
119862 = 1198684
(63)
Given the data matrices119860 119861 119862119876 119877 119877119890 and119881 the goal is to
calculate a local solution (119871lowast 119865lowast) isin D
119904of the NSDP problem
(10)ndash(12) using the method DSQP The corresponding 119865lowastis
considered as an approximate solution of the design problem(2)ndash(4) The open-loop system is discrete-time Schur stablebecause 120588(119860) = 09989 lt 1 Hence according to Lemma 3one can choose 119865
0= 0 and obtain 119871
0≻ 0 the corresponding
solution of the discrete Lyapunov equation (17) The twomethods NM and DSQP converge to the same local mini-mum after 25 and 21 iterations respectively Moreover wehave also tested the method DSQP for finding feasible pointsas explained at the end of Section 4 The achieved KKT andfeasible points are respectively
119865lowast= [
minus16109 01684 06795 63050
40166 minus08769 minus14994 minus29913]
119865feas = [minus1075749 88006 107506 1297845
183855 minus128539 minus139596 minus131650]
(64)
where 119871lowastand 119871 feas are the corresponding solutions of the dis-
crete Lyapunov equation (17) Table 1 shows the convergencebehavior of the method DSQP to the local solution
The method DSQP converges to a local minimum in lessnumber of iterations than the method NM for most of theconsidered test problemsThe next examples have also such abehavior
Example 17 This test problem is the discrete version of atransport aircraft model [8 AC8] The problem has the
dimensions 119899 = 9 119901 = 1 and 119903 = 5 Therefore we do notlist the data matrices 119860 119861 and 119862
The open-loop system of this example is not discrete-timeSchur stable where 120588(119860) = 10012 gt 1 The two methodsNM and DSQP are considered with the parametrizationapproach where 119905
0= 0002 and 119888
119896= (08)
119896 Both methodssuccessfully converge to the same local minimum after 21and 18 iterations respectivelyThe achieved KKT and feasiblepoints are respectively
119865lowast= [21458 minus05334 minus14506 00386 10690]
119865feas = [25640 minus06294 minus16525 00469 12302]
(65)
where 119871lowastand 119871 feas are the corresponding solutions of the
discrete Lyapunov equation (17)Table 2 shows the behavior of the two methods while
converging to the local solution The objective functions andthe convergence criteria are listed columnwise in that tableThe two methods show fast local convergence rate startingfrom 119865
0= 0
Figure 1 shows the state variables for the open- andclosed-loop systems of the current example where theachieved output feedback controller matrix 119865
lowastenforces all
state variables to decay to the zero state
Example 18 This test problem is the decentralized intercon-nected system [8 DIS3] The problem has the dimensions119899 = 8 119901 = 4 and 119903 = 4 Therefore we do not list the datamatrices 119860 119861 and 119862
The open-loop system for this example is discrete-timeSchur stable where 120588(119860) = 09620 lt 1 Starting from1198650= 0 where 119871
0is the corresponding solution of (17) the
methodDSQP successfully converges to aKKTpoint (119871lowast 119865lowast)
in 14 iterations while the method NM requires 16 iterationsto converge to the same local minimum Furthermore themethod DSQP requires 17 iterations to reach a feasible pointBoth of the KKT and the feasible points are respectively
119865lowast=[[[
[
minus17344 minus05988 minus01937 00938
02451 minus01286 04894 minus05011
00037 minus00705 minus03206 00853
00606 minus02429 minus01231 minus01806
]]]
]
119865feas =[[[
[
minus105946 minus07911 minus04047 07671
55324 minus21539 35120 minus31956
02289 minus18917 minus120235 19402
04861 minus22963 minus03051 minus20438
]]]
]
(66)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Furthermore Table 3 shows the convergence behavior of themethod DSQP to the local solution (119871
lowast 119865lowast) isin D
119904
Example 19 This test problem represents a nuclear reactormodel [8 REA3]The dimensions of this example are 119899 = 12119901 = 1 and 119903 = 3 Therefore we skip listing the data matrices119860 119861 and 119862
The open-loop system for this example is not discrete-time Schur stable By applying the parametrization approach
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Journal of Applied Mathematics 3
From Lyapunov stability theory the unknown 119865 must bechosen from the following set
S119865= 119865 isin R
119901times119903
120588 (119860 + 119861119865119862) lt 1 (7)
where 120588(sdot) is the spectral radius This restriction is requiredultimately to guarantee the existence of a unique solution ofthe discrete Lyapunov equation (6) see for example [24]Moreover from the Lyapunov stability theory the next lemmagives an equivalence between the asymptotic stability of thesystem (2) and fulfilling two positive definite constraints
Lemma 3 ([24 Lemma 5719]) Consider the SOF problem(2)ndash(4) An119865 isin S
119865exists if and only if there exists (119871 119865) isin D
119904
where
D119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884 (119871 119865) ≻ 0 (8)
where
119884 (119871 119865) = 119871 minus (119860 + 119861119865119862) 119871(119860 + 119861119865119862)119879
(9)
According to Lemma 3 and by considering both of 119871
and 119865 as independent variables where we skip the imposeddependency of 119871 on 119865 that was considered in (5)-(6) then theminimization problem can be stated as the following NSDP
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
(10)
st 119867 (119871 119865) = minus 119871 + (119860 + 119861119865119862) 119871(119860 + 119861119865119862)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
= 0
(11)
119884 (119871 119865) ≻ 0 119871 ≻ 0 (12)
Instead of considering (5)ndash(7) we would rather considerthe constrained minimization problem (10)ndash(12) which canbe seen as a generalization of the former problem Theequivalence between the stability condition (7) and thepositive definite constraints of (8) provides a straightforwardidea to fulfill such a constraint within the numerical algo-rithm explicitly There are however different alternatives tohandle the positive definite constraints within a numericalalgorithm First onemight incorporate those positive definiteterms within the objective function and apply an interior-point technique on the corresponding constrained problemsee [2] We might also use slack matrix variables for theinequality constraintsThen one solves the problemwith onlyequality constraints
We end this section by noting that the two sets S119865and
D119904are open Therefore it is convenient to replace them by
the two subsets Ω andΩ respectively where both subsets areassumed to be compact For example the level set
Ω = 119865 isin S119865 119869 (119865) le 119869 (119865
0) sube S
119865(13)
is compact see [9]
3 An SQP Method for the Design Problem
Let us consider the minimization problem (10)ndash(12) TheLagrangian function associated with the equality constraintis defined as
ℓ (119871 119865 119870) = 119869 (119871 119865) + ⟨119870119867 (119871 119865)⟩ (14)
where 119870 isin R119899times119899 is the Lagrange multiplier The next lemmaincludes first- and second-order derivatives of ℓ and firstderivatives of the function119867 Similar results can be found in[16 Lemma 21] but on a simpler problem In the followingdiscussion we denote 119860(119865) = 119860 + 119861119865119862 and 119876(119865) = 119876 +
119862119879
119865119879
119877119865119862
Lemma 4 Consider the NSDP problem (10)ndash(12) TheLagrangian function ℓ(119871 119865119870) is twice continuously differen-tiable and its first- and second-order directional derivatives aswell as first-order derivatives of the constraint function 119867 arethe following
ℓ119871(sdot) Δ119871 = Tr ((119860(119865)119879119870119860 (119865) + 119876 (119865) minus 119870)Δ119871)
ℓ119865(sdot) Δ119865 = Tr (2119870
119865119871119862119879
Δ119865119879
+2 (119861119879
119870119861 + 119877)119865119877119890Δ119865119879
)
ℓ119871119871
(sdot) (Δ119871 Δ119871) = 0
ℓ119871119865
(sdot) (Δ119871 Δ119865) = ℓ119865119871
(119871 119865 119870) (Δ119865 Δ119871)
= Tr (2119870119865Δ119871119862119879
Δ119865119879
)
ℓ119865119865
(sdot) (Δ119865 Δ119865) = Tr (2 (119861119879119870119861+119877)Δ119865 (119862119871119862119879
+119877119890) Δ119865119879
)
119867119871(sdot) Δ119871 = ⟨Δ119871 nabla
119871119867(sdot)⟩ = Δ119871 minus 119860 (119865) Δ119871119860(119865)
119879
119867119865(sdot) Δ119865 = ⟨Δ119865 nabla
119865119867(sdot)⟩ = 119861Δ119865119871
119879
119865+ 119871119865Δ119865119879
119861119879
(15)
where119870119865= 119861119879
119870119860(119865) + 119877119865119862 and 119871119865= 119860(119865)119871119862
119879
+ 119861119865119877119890
Proof By using the directional derivatives with both of ℓ and119867 the above derivatives are obtained
The Karush-Kuhn-Tucker (KKT) optimality conditionsyield a nonlinear system of matrix equations as given in thenext lemma
Lemma 5 (see eg [7 Section 5]) Let (119871 119865) isin D119904be a local
minimizer of the problem (10)ndash(12) and let (10)ndash(12) be regularat (119871 119865) Then there exists a Lagrange multiplier 119870 isin R119899times119899
satisfying with 119871 and 119865 the following KKT conditions
M (119880) = (
2119870119865119871119862119879
+ 2 (119861119879
119870119861 + 119877)119865119877119890
minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865)
)
= 0
(16)
where 119870119865is as defined in Lemma 4 and 119880 = (119871 119865119870) isin D
119904times
R119899times119899
4 Journal of Applied Mathematics
Clearly the system (16) is nonlinear in the unknowns 119871119865 and 119870 However the last two equations of (16) might beviewed as discrete Lyapunov equations of the following form
119871 = 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
(17)
119870 = 119860(119865)119879
119870119860 (119865) + 119876 (119865) (18)
The SQP method is based on minimizing successfully aquadratic program of the form
min(Δ119871Δ119865)
119902 (Δ119871 Δ119865) st ℎ (Δ119871 Δ119865) = 0 (19)
where
119902 (Δ119871 Δ119865)
= ℓ119871Δ119871 + ℓ
119865Δ119865
+1
2(ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865))
ℎ (Δ119871 Δ119865) = 119867119871(119871 119865) Δ119871 + 119867
119865(119871 119865) Δ119865 + 119867 (119871 119865)
(20)
All derivatives required for constructing this QP are given inLemma 4
An SQP method known also as Newton-Lagrangemethod generates a sequence of iterates by solving theaugmented linear system
(
nabla2
119871119871ℓ119896
nabla2
119871119865ℓ119896
nabla119871119867lowast
119896
nabla2
119865119871ℓ119896
nabla2
119865119865ℓ119896
nabla119865119867lowast
119896
nabla119871119867119896
nabla119865119867119896
0
)(
Δ119871
Δ119865
Δ119870
) = minus(
nabla119871ℓ119896
nabla119865ℓ119896
119867119896
)
(21)
and updates the step by
(119871119896+1
119865119896+1
119870119896+1
)
= (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896 119870119896+ 120572119896Δ119870119896)
(22)
where 120572 isin (0 1] is the step size
Assumption 6 Throughout this paper we make the followingassumptions
(H1) Themappings 119869 and119867 are at least twice continuouslydifferentiable
(H2) For a given (119871 119865) isin D119904the mapping nabla
119871119867(119871 119865) is
invertible(H3) There exists an (119871
0 1198650) isin D
119904 Moreover assume that
for a given (119871119896 119865119896) isin D
119904there always exists an 120572
119896gt 0
such that (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) isin D
119904
The next theoremprovides us with the linearization of thenonlinear system (16)
Theorem 7 For a given 119880 = (119871 119865 119870) isin D119904times R119899times119899 the
linearized equations of the KKT system (16) are the following
(
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119862119879
+ 119861119879
Δ119870119871119865
119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
minus Δ119871 + 119860 (119865) Δ119871119860(119865)119879
119862119879
Δ119865119879
119870119865+ 119870119879
119865Δ119865119862 minus Δ119870 + 119860(119865)
119879
Δ119870119860 (119865)
)
= minus(
119870119865119871119862119879
+ (119861119879
119870119861 + 119877)119865119877119890
minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865)
)
(23)
where119870119865and 119871
119865are as defined in Lemma 4
Proof The linearization of the nonlinear system M(119880) = 0
about the point 119880 = (119871 119865119870) in the direction of Δ119880 =
(Δ119871 Δ119865 Δ119870) takes the form
nablaM(119880)119879
Δ119880 = minusM (119880) (24)
wherenablaM(119880)119879 is the Jacobianmatrix withwhichwe directly
obtain the system (23)
Under certain assumptions it is possible to show that theSQP direction Δ119880 given by (23) is well definedThe difficultythat one faces when solving (23) is due to the fact that we donot have an explicit representation of the Jacobian of M(119880)However if we write 119880 = (119871 119865119870) as a long column vectorvec(119880) isin R119901119903+2119899
2
such that 119891(vec(119880)) = M(119880) then we areable to evaluate the Jacobian of 119891 using the basic propertiesof the Kronecker product which is an (2119899
2
+ 119901119903) times (21198992
+ 119901119903)
matrix
Theorem 8 Let 119880 = (119871 119865119870) isin D119904times R119899times119899 be given The
Jacobian matrix ofM(119880) is given by
nablaM(119880)119879
= (
(119862119871119862119879
+ 119877119890) otimes (119861
119879
119870119861 + 119877) 119862 otimes 119870119865
119871119879
119865otimes 119861119879
[119871119865otimes 119861 + 119870
119899119899(119871119865otimes 119861)] 119878
1198650
[119870119903119899(119862119879
otimes119870119879
119865)+(119862
119879
otimes119870119879
119865)] 0 119878
119879
119865
)
(25)
where119870119865and119871
119865are as defined in Lemma 4 119878
119865= minus1198681198992+119860(119865)otimes
119860(119865) and119870119898119899
is an119898119899 times119898119899 commutation matrix defined asvec(119882119879) = 119870
119903119899vec(119882) for any119898times119899matrix119882 Furthermore
the linear system (23) is explicitly written as
nablaM(119880)119879 vec (119880) = minus vec (M) (26)
Journal of Applied Mathematics 5
wherevec (M)
= (
vec (119870119865119871119862119879
+ (119861119879
119870119861 + 119877)119865119877119890)
vec (minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
)
vec (minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865))
)
(27)
Proof For any given threematrices119860119861 and119862 of appropriatedimensions the linear matrix equation
119860119883119861 = 119862 (28)
is equivalent to the explicit linear system
(119861119879
otimes 119860) vec (119883) = vec (119862) (29)
If we apply this result on the above linear system the entriesof the Jacobian matrix can be easily obtained
Indeed the last result shows that the dimension ofthe Jacobian matrix (25) can be very large because of theKronecker productsMoreover the evaluation of the Jacobianmatrix explicitly in the SQP method is unnecessary andmakes the method impractical By taking this fact in mindthe reducedHessian approach is rather considered as an idealcandidate for finding the local solution of theNSDP (10)ndash(12)see for example [2 16]
31 The Reduced Hessian Approach The reduced Hessianapproach relies on the existence of the null space and theright inverse of the Jacobian nabla119867
119879 In optimal control suchoperators are not available explicitly However it is possibleto construct them from the problem itself for more detailssee for example [2 16 25] The two operators are defined as
119885 (119871 119865) = (minus119867minus1
119871(119871 119865)119867
119865(119871 119865) 119868
119901)
(119871 119865) = (minus119867minus1
119871(119871 119865) 0)
(30)
where 119868119901and 0 are the identity and the zero operators
respectively We note that if the Jacobian nabla119867119879 is surjective
then such a right inverse exists We also note that the rangespace of119885 coincides with the null space of the Jacobian nabla119867
119879see [16 Lemma 2]
Next with the help of 119885 and the following result showsthat the linearized equality constraint is decomposed into twodiscrete Lyapunov equations
Lemma 9 Let (119871 119865) isin D119904be given and let (Δ119871 Δ119865) isin
R119899times119899+119901times119903 be the solution of the QP (19) Then the linearizedequality constraint of (19) is decomposed into the followingdiscrete Lyapunov equations
Δ119871119899
= 119860 (119865) Δ119871119899
(119860119865)119879
+ 119867 (119871 119865) (31)
Δ119871119905
= 119860 (119865) Δ119871119905
119860(119865)119879
+ 119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
(32)
where 119871119865is as given in Lemma 5
Proof (see also [16 Lemma 3]) The linearized equalityconstraint of (19) can be rewritten as
nabla119871119867(119871 119865) Δ119871
119905
+ nabla119865119867(119871 119865) Δ119865
+ nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0
(33)
where Δ119871 = Δ119871119899
+ Δ119871119905 According to the definition of 119885 and
the above equation can be decomposed as
nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0 forallΔ119871119899
119867119871(119871 119865) Δ119871
119905
(Δ119865) + 119867119865(119871 119865) Δ119865 = 0 forallΔ119865
(34)
which yield the discrete Lyapunov equations (31) and (32)respectively
Following the proof of Lemma 9 the step (Δ119871 Δ119865) thatsolves the QP (19) with the help of 119885 and is decomposed as
(Δ119871 Δ119865) = 119885 (119871 119865) Δ119865 + (119871 119865)119867 (119871 119865)
= (Δ119871119905
(Δ119865) Δ119865) + (Δ119871119899
0)
(35)
where (Δ119871119905(Δ119865) Δ119865) and (Δ119871119899
0) are the tangential and thenormal steps respectively
Consequently one can obtain the normal step (Δ119871119899
0) bysolving the discrete Lyapunov equation (31) for Δ119871119899 Havingobtained such a step component we solve the followingtangential subproblem for Δ119865
minΔ119865isinR119901times119903
120595 (Δ119865) = 119902 (Δ119871119905
(Δ119865) Δ119865)
= ⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩ + ⟨Δ119865 nabla
119865ℓ (sdot)⟩
+ ⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119899
⟩
+ ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119899
⟩
+1
2⟨Δ119865 119885
119879
nabla2
ℓ (sdot) 119885Δ119865⟩
(36)
where
⟨Δ119865 119885119879
nabla2
ℓ (sdot) 119885Δ119865⟩ = ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
+ ⟨Δ119865 nabla2
119865119865ℓ (sdot) Δ119865⟩
+ 2⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
(37)
and Δ119871119905
(Δ119865) is the corresponding solution of the discreteLyapunov equation (32)
In order to find the local solution of the minimizationproblem (36) let us apply the necessary optimality conditionswhich give the following result
Lemma 10 Let (119871 119865 119870) isin D119904times R119899times119899 and Δ119871
119899
isin R119899times119899
be given Moreover let Δ119865 isin R119901times119903 be a local minimum for
6 Journal of Applied Mathematics
the problem (36) Then Δ119865 solves the following linear matrixequation
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119905
(Δ119865)119862119879
+ 119861119879
Δ119870 (Δ119865) 119871119865
= minus119870119865(119871 + Δ119871
119899
) 119862119879
minus (119861119879
119870119861 + 119877)119865119877119890minus 119861119879
119878119871119865
(38)
where Δ119871119905(Δ119865) Δ119870(Δ119865) and 119878 respectively solve the discreteLyapunov equations (32) and
Δ119870 = 119860(119865)119879
Δ119870119860 (119865) + 119870119879
119865Δ119865119862 + 119862
119879
Δ119865119879
119870119865 (39)
119878 = 119860(119865)119879
119878119860 (119865) +119872 +119872119879
(40)
where119870119865and 119871
119865are as defined in Lemma 4 and
119872 = minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865) (41)
Proof We use the derivatives of ℓ given in Lemma 4 toconstruct 120595(Δ119865) If we differentiate 120595 with respect to Δ119865 andapply the necessary optimality conditions we obtain
119885119879
nabla2
ℓ (sdot) 119885Δ119865
= minusnabla119865ℓ (sdot) minus nabla
2
119865119871Δ119871119899
minus120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
(42)
which is another representation of (38) As an example ofevaluating these derivatives we obtain the last term of (42)as follows
120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
=120597
120597Δ119865Tr (119872Δ119871
119905
(Δ119865))
=120597
120597Δ119865Tr(119872
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865
+119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
)
= 119861119879
(
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
)119871119865
= 119861119879
119878119871119865
(43)
where
Δ119871119905
(Δ119865) =
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
119878 =
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
(44)
are the exact solutions of the discrete Lyapunov equations (32)and (40) respectively
Because of using directional derivatives the resultinglinear system (38)ndash(40) is not given explicitly Howeverone can modify the conjugate gradient (CG) method [17]and solve this system iteratively The problem structure isexploited where the partition of the unknown 119883 = (119871 119865)
is utilizedFor a given Δ119865 calculated by the CG method both of
Δ119871119905
(Δ119865) andΔ119870(Δ119865) are uniquely determined by solving thediscrete Lyapunov equations (32) and (39) respectively TheCG algorithm for solving the system (38)ndash(40) is stated in thefollowing lines wherewe use119879
119894119863119894 and119864
119894at the 119894th CG inner
iteration to denote the approximation of the step componentΔ119865 the CG direction and the residual respectively
Algorithm 11 (modified CG method) Let 119880 = (119871 119865119870) isin
D119904times R119899times119899 and Δ119871
119899 be given Moreover let 119860 119861 119862 119876 119877119877119890 and 119881 be given constant matrices Set 119879
0= 0 119864
0=
minus119870119865119871119862119879
minus (119861119879
119870119861 + 119877)119865119877119890 and 119863
0= 1198640 Choose 120578 and
120598 isin (0 1)
For 119894 = 0 1 do
(1) Solve for Δ119871119905(119863119894) and Δ119870(119863
119894) the discrete Lyapunov
equations (32) and (39) respectively(2) Calculate
119873(119863119894)
= (119861119879
119870119861 + 119877)119863119894(119862119871119862
119879
+ 119877119890)
+ 119870119865Δ119871119905
(119863119894) 119862119879
+ 119861119879
Δ119870 (119863119894) 119871119865
(45)
(3) If Tr(119863119879119894119873(119863119894)) le 120598119863
1198942 update the step Δ119865 as
follows if 119894 = 0 set Δ119865 = 1198630 else set Δ119865 = 119879
119894and
exit(4) Calculate the ratio 120579
119894= Tr(119864119879
119894119864119894)Tr(119863119879
119894119873(119863119894)) Set
119879119894+1
= 119879119894+ 120579119894119863119894and 119864
119894+1= 119864119894minus 120579119894119873(119863119894)
(5) If 119864119894+1
le 1205781198640 set Δ119865 = 119879
119894+1and exit
(6) Calculate the ratio
120573119894=Tr (119864119879119894+1
119864119894+1
)
Tr (119864119879119894119864119894)
(46)
Set119863119894+1
= 119864119894+1
+ 120573119894119863119894 119894 = 119894 + 1 and go to (1)
End (do)
There are two exits in this CGmethodThe first one takesplace when a negative or zero curvature is encountered by thecalculated search direction The second exit occurs when thenorm of the new residual is sufficiently small
Having evaluated both of Δ119871119899119896and (Δ119871
119905
(Δ119865119896) Δ119865119896) then
according to the step decomposition (35) the total step(Δ119871119896 Δ119865119896) is obtained Consequently the new iterate takes
the form
(119871119896+1
119865119896+1
) = (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) (47)
where 120572119896
gt 0 is the step size Starting from 1205720
= 1 wecalculate the step size 120572
119896by a backtracking rule (eg by
Journal of Applied Mathematics 7
halving 120572) until we satisfy the following sufficient decreasecondition
Φ120583119896 (119871119896+ 120572119896Δ119871 119865119896+ 120572119896Δ119865)
le Φ120583119896
119896+ 120591120572119896[Φ120583119896
119871(119871119896 119865119896) Δ119871 + Φ
120583119896
119865(119871119896 119865119896) Δ119865]
(48)
where 120591 isin (0 12) is a given parameter Let 119896be the achieved
step size Starting from that 119896we satisfy the following
stability condition by backtracking in the same way until an120572119896gt 0 is reached such that
119871119896+ 120572119896Δ119871119896≻ 0 119884 (119871
119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) ≻ 0
(49)
We assume that there always exists an 120572119896gt 0 such that
(48) is satisfied If 120572 is decreased and reached a lower bound120572min gt 0 without fulfilling (49) then we might follow oneof the ideas often used in modifying the Hessian matrix ofNewton-based methods see for example [17 Section 63]Let119882
119896denote any of the twomatrices 119871
119896+120572minΔ119871119896 or119884(119871119896+
120572minΔ119871119896 119865119896 + 120572minΔ119865119896) with a spectral decomposition119882119896=
119876Λ119876119879 A correction matrix Δ119882
119896of minimum Frobenius
norm that ensures 120582min(119882119896 + Δ119882119896) ge 120575 gt 0 is given by
Δ119882119896= 119876 diag (119905
119894) 119876119879
(50)
where
119905119894=
0 120582119894gt 120575
120575 minus 120582119894
otherwise(51)
The modified matrix is
119882119896+ Δ119882
119896= 119876 (Λ + diag (119905
119894)) 119876119879
(52)
where 120582min(119882119896) means the smallest eigenvalue of 119882119896 Note
that the nature of the stability constraint is an inactiveconstraint for most test problems
The Matlab function [sim 119895] = cholinc(119872) of the incom-plete Cholesky factorization can be used for checking thepositive definiteness where the indicator 119895 is used for thatpurpose On the other hand as mentioned at the end ofSection 2 we can check the stability condition via the spectralradius of the closed-loop system matrix namely 120588(119860(119865
119896+
120572119896Δ119865119896)) lt 1
We use as a merit function the following 1198971-penalty
function for globalizing the SQP method
Φ120583
(119871 119865) = 119869 (119871 119865) + 120583119867 (119871 119865)1 (53)
where 120583 gt 0 is the penalty parameter This function isdirectionally differentiable
The following update rule for the penalty parameter 120583 isconsidered (see eg [17 page 547])
120583119896=
120583119896minus1
if 120583119896minus1
ge1003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 1205741003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 2120574 otherwise(54)
where 120574 gt 0 is a given constant andΔ119870119896is obtained by solving
the discrete Lyapunov equation (39)The following algorithm demonstrates the SQP method
that finds the local solution of the NSDP (10)ndash(12)
Algorithm 12 (the method DSQP) Let (1198710 1198650 1198700) isin D
119904times
R119899times119899 be given Moreover let 119860 119861 119862 119876 119877 119877119890 and 119881 be
given constant matrices Choose 120591 isin (0 12) 120574 gt 0 and120598tol isin (0 1)
While nabla119880ℓ119896 gt 120598tol do
(1) Calculate Δ119871119899
119896solution of the discrete Lyapunov
equation (31)
(2) For a given Δ119871119899
119896calculate the local solution
(Δ119871119905
(Δ119865119896) Δ119865119896) of the problem (36) by Algorithm 11
Then set (Δ119871119896 Δ119865119896) = (Δ119871
119899
119896 0) + (Δ119871
119905
(Δ119865119896) Δ119865119896)
(3) Calculate Δ119870119896by solving (39) and then update the
penalty parameter 120583119896using (54)
(4) Starting from 1205720= 1 apply a backtracking step-size
rule that satisfies the sufficient decrease conditions(48)
(5) If (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896)) notin D
119904 then maintain the
positive definiteness of (49) as described above
(6) Set 119865119896+1
= 119865119896+ 120572119896Δ119865119896 119871119896+1
= 119871119896+ 120572119896Δ119871119896 119870119896+1
=
119870119896+ 120572119896Δ119870119896 and 119896 = 119896 + 1 then go to step (1)
End (While)
Step (5) of Algorithm 12 can also be modified as followsSet119865119896+1
= 119865119896+120572119896Δ119865119896Then obtain119871
119896+1= 119871(119865
119896+1) and119870
119896+1=
119870(119865119896+1
) by solving the discrete Lyapunov equations (17) and(18) respectively This means we project the search directionfrom the spaceD
119904to the control-variable space R119901times119903
The global convergence behavior of the method DSQP isbeyond the scope of this work However we state some of themain global convergence results which can be shown underthe following general assumptions
Assumption 13 In addition to Assumption 6 we furtherassume that the functions 119869 and 119867 together with theirderivatives are in Ω sube D
119904 We further assume that the
operator 119867minus1
119871is uniformly bounded in D
119904 furthermore
we assume that the sequences nabla2ℓ119896 119871119896 119865119896 119870119896 and
119885(119871119896 119865119896) are all bounded inΩ
The next lemma provides an upper bound for the direc-tional derivative of themerit function by the computed searchdirection
Lemma 14 Let (Δ119871 Δ119865 Δ119870) be generated by the SQP iter-ation (21) Then the directional derivative of Φ120583(119871 119865) in thedirection (Δ119871 Δ119865) satisfies
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
le minus [ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865)]
minus [120583 minus Δ119870infin] 1198671
(55)
8 Journal of Applied Mathematics
where the directional derivatives of Φ120583(119871 119865) are given by
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
= 119869119871(119871 119865) Δ119871 + 119869
119865(119871 119865) Δ119865 minus 120583119867 (119871 119865)
1
= Tr (Δ119871119876 (119865)) + 2Tr (Δ119865119879119877119865 (119862119871119862119879
+ 119877119890))
minus 120583119867 (119871 119865)1
(56)
Proof See [17 Lemma 182]
Following [17 Theorem 183] the search direction com-puted by the method DSQP is descent for the merit functionΦ
Theorem 15 Suppose that (119871119896 119865119896) isin D
119904is not a stationary
point of theNSDP (10)ndash(12) and the reducedHessian119885119896nabla2
ℓ119896119885119896
is positive definite Then the search direction (Δ119871119896 Δ119865119896) by the
method DSQP is a descent direction for the merit functionΦ if120583 is updated by (54)
4 Initial Feasible Solution
As can be seen in Algorithm 12 an initial (1198710 1198650) isin D
119904is
required to start the method DSQP Such a matrix pair canbe obtained by using any method that calculates suboptimalsolutions (see eg [21 Algorithm Fstab]) or by a pole assign-ment method see for example [18] Another alternative isto parameterize the system matrix 119860 such that 120588(119860) lt 1
and therefore 1198650can be chosen as the zero matrix Hence
according to Lemma 3 one can obtain 1198710≻ 0 by solving the
discrete Lyapunov equation (17)This idea is described in [16]and is stated herein for completeness In the parametrizationapproach one replaces the system matrix 119860 by 119860
119905= (1 minus
119905)119860 where 0 le 119905 lt 1 is a parameter Then instead ofsolving the NSDP problem (10)ndash(12) we solve the followingparameterized problem
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
st 119867119905(119871 119865) = minus119871 + 119860
119905(119865) 119871119860
119905(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
=0
119884119905(119871 119865)=119871minus(119860
119905+119861119865119862) 119871(119860
119905+119861119865119862)
119879
≻0 119871≻0
(57)
where 119860119905(119865) = 119860
119905+ 119861119865119862 and the constant matrices 119860 119861 119862
119876119877119890 and119881 are as defined in Section 2Thematrix pair (119871 119865)
must be chosen from the following parameterized set
D119905
119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884119905(119871 119865) ≻ 0 (58)
Obviously as 119905 rarr 0 the setD119905119904approaches the setD
119904
The initialization of the method DSQP can be as followsStarting from 119905
0= 0 where 119905
0isin [0 1) we choose 119905
0as the
first candidate such that 120588(1198601199050
) lt 1 and set 1198650= 0 Having
(1199050 1198650) then initial 119871
0and119870
0can be obtained by solving the
discrete Lyapunov equations
119871 = 1198601199050
(1198650) 1198711198601199050
(1198650)119879
+ 119881
119870 = 1198601199050
(1198650)119879
1198701198601199050
(1198650) + 119876
(59)
Then Algorithm 12 can be applied directly on the parame-terized problem (57) but after replacing 119860(119865) by 119860
119905(119865) The
parameter 119905 is updated in the main iteration loop accordingto the decreasing sequence 119905
119896
119905119896+1
= 119888119896119905119896 (60)
where 119888119896 darr 0 As mentioned above we choose 119905
0isin [0 1) as
the first candidate such that 120588(1198601199050
) lt 1 starting from 1199050= 0
On the other hand we might test the method DSQP forfinding feasible points of the problem (57) that is findingpoints that satisfy the equality constraints as well as thepositive definite constraints This can be achieved if we solvethe problem with zero objective function For that purposewe set the objective function and all its derivatives to bezero in Algorithm 12 As a result and with the exceptionof (15) the simplification of all formulas has no drawbackson Algorithm 12 In that case the zero term of the objectivefunction in (15) implies (18) to reduce to
119870 = 119860119905(119865)119879
119870119860119905(119865) (61)
which cannot be used in its current form to update themultiplier 119870 as suggested in Algorithm 12 because it yieldsthe trivial solution119870 = 0 In order to overcome this difficultythe multiplier is updated instead by the modified equation
119870 = 119860119905(119865)119879
119870119860119905(119865) + 119868
119899 (62)
5 Numerical Results
This section includes an implementation of the methodDSQP using Matlab Moreover the method DSQP is com-pared versus Newtonrsquos method (NM) [9] applied on theminimization problem (5)-(6) Four test problems fromthe benchmark collection COMPlib [8] are considered indetail in addition to an application of a hydraulic turbine[26] The benchmark COMPlib includes mainly continuous-time test problems Therefore the function c2d from thecontrol system toolbox of Matlab is considered to convert thecontinuous-time model to the discrete-time counterpart
For those test problems with 120588(119860) lt 1 according toLemma 3 it is possible to start the method DSQP with 119865
0= 0
and to obtain 1198710by solving the discrete Lyapunov equation
(17) However for test problems with 120588(119860) ge 1 an initial(1198710 1198650) isin D
119904is required otherwise the parametrization
approach described in Section 4 can be appliedThe functiondlyap from the control system toolbox of Matlab is usedfor calculating the approximate solutions of the discreteLyapunov equations For all test problems the tolerance is120598tol = 1 times 10
minus6 The constant weight matrices 119876 and 119877 andthe covariancematrices119881 and119877
119890are taken as the unit matrix
Journal of Applied Mathematics 9
Table 1 Convergence behavior of the method DSQP for Example16
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 31135119890 + 005 84992119890 + 007 99838119890 minus 001 02 21007119890 + 005 37773119890 + 007 99745119890 minus 001 13 14256119890 + 005 16786119890 + 007 99581119890 minus 001 1
19 15151119890 + 003 28400119890 minus 003 96853119890 minus 001 620 15151119890 + 003 76411119890 minus 005 96853119890 minus 001 621 15151119890 + 003 90844119890 minus 009 96853119890 minus 001 8
Example 16 The first test problem is a supersonic transportaircraft under Mach 27 flight condition see [8 AC16] Thediscrete-time data matrices are as follows
119860 =[[[
[
09901 00012 00000 minus00994
minus00315 10000 00989 00014
minus06269 minus00004 09773 00376
01237 00001 00016 09892
]]]
]
119861 =[[[
[
00005 00004
00004 00040
00078 00794
minus00086 minus00066
]]]
]
119862 = 1198684
(63)
Given the data matrices119860 119861 119862119876 119877 119877119890 and119881 the goal is to
calculate a local solution (119871lowast 119865lowast) isin D
119904of the NSDP problem
(10)ndash(12) using the method DSQP The corresponding 119865lowastis
considered as an approximate solution of the design problem(2)ndash(4) The open-loop system is discrete-time Schur stablebecause 120588(119860) = 09989 lt 1 Hence according to Lemma 3one can choose 119865
0= 0 and obtain 119871
0≻ 0 the corresponding
solution of the discrete Lyapunov equation (17) The twomethods NM and DSQP converge to the same local mini-mum after 25 and 21 iterations respectively Moreover wehave also tested the method DSQP for finding feasible pointsas explained at the end of Section 4 The achieved KKT andfeasible points are respectively
119865lowast= [
minus16109 01684 06795 63050
40166 minus08769 minus14994 minus29913]
119865feas = [minus1075749 88006 107506 1297845
183855 minus128539 minus139596 minus131650]
(64)
where 119871lowastand 119871 feas are the corresponding solutions of the dis-
crete Lyapunov equation (17) Table 1 shows the convergencebehavior of the method DSQP to the local solution
The method DSQP converges to a local minimum in lessnumber of iterations than the method NM for most of theconsidered test problemsThe next examples have also such abehavior
Example 17 This test problem is the discrete version of atransport aircraft model [8 AC8] The problem has the
dimensions 119899 = 9 119901 = 1 and 119903 = 5 Therefore we do notlist the data matrices 119860 119861 and 119862
The open-loop system of this example is not discrete-timeSchur stable where 120588(119860) = 10012 gt 1 The two methodsNM and DSQP are considered with the parametrizationapproach where 119905
0= 0002 and 119888
119896= (08)
119896 Both methodssuccessfully converge to the same local minimum after 21and 18 iterations respectivelyThe achieved KKT and feasiblepoints are respectively
119865lowast= [21458 minus05334 minus14506 00386 10690]
119865feas = [25640 minus06294 minus16525 00469 12302]
(65)
where 119871lowastand 119871 feas are the corresponding solutions of the
discrete Lyapunov equation (17)Table 2 shows the behavior of the two methods while
converging to the local solution The objective functions andthe convergence criteria are listed columnwise in that tableThe two methods show fast local convergence rate startingfrom 119865
0= 0
Figure 1 shows the state variables for the open- andclosed-loop systems of the current example where theachieved output feedback controller matrix 119865
lowastenforces all
state variables to decay to the zero state
Example 18 This test problem is the decentralized intercon-nected system [8 DIS3] The problem has the dimensions119899 = 8 119901 = 4 and 119903 = 4 Therefore we do not list the datamatrices 119860 119861 and 119862
The open-loop system for this example is discrete-timeSchur stable where 120588(119860) = 09620 lt 1 Starting from1198650= 0 where 119871
0is the corresponding solution of (17) the
methodDSQP successfully converges to aKKTpoint (119871lowast 119865lowast)
in 14 iterations while the method NM requires 16 iterationsto converge to the same local minimum Furthermore themethod DSQP requires 17 iterations to reach a feasible pointBoth of the KKT and the feasible points are respectively
119865lowast=[[[
[
minus17344 minus05988 minus01937 00938
02451 minus01286 04894 minus05011
00037 minus00705 minus03206 00853
00606 minus02429 minus01231 minus01806
]]]
]
119865feas =[[[
[
minus105946 minus07911 minus04047 07671
55324 minus21539 35120 minus31956
02289 minus18917 minus120235 19402
04861 minus22963 minus03051 minus20438
]]]
]
(66)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Furthermore Table 3 shows the convergence behavior of themethod DSQP to the local solution (119871
lowast 119865lowast) isin D
119904
Example 19 This test problem represents a nuclear reactormodel [8 REA3]The dimensions of this example are 119899 = 12119901 = 1 and 119903 = 3 Therefore we skip listing the data matrices119860 119861 and 119862
The open-loop system for this example is not discrete-time Schur stable By applying the parametrization approach
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Journal of Applied Mathematics
Clearly the system (16) is nonlinear in the unknowns 119871119865 and 119870 However the last two equations of (16) might beviewed as discrete Lyapunov equations of the following form
119871 = 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
(17)
119870 = 119860(119865)119879
119870119860 (119865) + 119876 (119865) (18)
The SQP method is based on minimizing successfully aquadratic program of the form
min(Δ119871Δ119865)
119902 (Δ119871 Δ119865) st ℎ (Δ119871 Δ119865) = 0 (19)
where
119902 (Δ119871 Δ119865)
= ℓ119871Δ119871 + ℓ
119865Δ119865
+1
2(ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865))
ℎ (Δ119871 Δ119865) = 119867119871(119871 119865) Δ119871 + 119867
119865(119871 119865) Δ119865 + 119867 (119871 119865)
(20)
All derivatives required for constructing this QP are given inLemma 4
An SQP method known also as Newton-Lagrangemethod generates a sequence of iterates by solving theaugmented linear system
(
nabla2
119871119871ℓ119896
nabla2
119871119865ℓ119896
nabla119871119867lowast
119896
nabla2
119865119871ℓ119896
nabla2
119865119865ℓ119896
nabla119865119867lowast
119896
nabla119871119867119896
nabla119865119867119896
0
)(
Δ119871
Δ119865
Δ119870
) = minus(
nabla119871ℓ119896
nabla119865ℓ119896
119867119896
)
(21)
and updates the step by
(119871119896+1
119865119896+1
119870119896+1
)
= (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896 119870119896+ 120572119896Δ119870119896)
(22)
where 120572 isin (0 1] is the step size
Assumption 6 Throughout this paper we make the followingassumptions
(H1) Themappings 119869 and119867 are at least twice continuouslydifferentiable
(H2) For a given (119871 119865) isin D119904the mapping nabla
119871119867(119871 119865) is
invertible(H3) There exists an (119871
0 1198650) isin D
119904 Moreover assume that
for a given (119871119896 119865119896) isin D
119904there always exists an 120572
119896gt 0
such that (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) isin D
119904
The next theoremprovides us with the linearization of thenonlinear system (16)
Theorem 7 For a given 119880 = (119871 119865 119870) isin D119904times R119899times119899 the
linearized equations of the KKT system (16) are the following
(
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119862119879
+ 119861119879
Δ119870119871119865
119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
minus Δ119871 + 119860 (119865) Δ119871119860(119865)119879
119862119879
Δ119865119879
119870119865+ 119870119879
119865Δ119865119862 minus Δ119870 + 119860(119865)
119879
Δ119870119860 (119865)
)
= minus(
119870119865119871119862119879
+ (119861119879
119870119861 + 119877)119865119877119890
minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865)
)
(23)
where119870119865and 119871
119865are as defined in Lemma 4
Proof The linearization of the nonlinear system M(119880) = 0
about the point 119880 = (119871 119865119870) in the direction of Δ119880 =
(Δ119871 Δ119865 Δ119870) takes the form
nablaM(119880)119879
Δ119880 = minusM (119880) (24)
wherenablaM(119880)119879 is the Jacobianmatrix withwhichwe directly
obtain the system (23)
Under certain assumptions it is possible to show that theSQP direction Δ119880 given by (23) is well definedThe difficultythat one faces when solving (23) is due to the fact that we donot have an explicit representation of the Jacobian of M(119880)However if we write 119880 = (119871 119865119870) as a long column vectorvec(119880) isin R119901119903+2119899
2
such that 119891(vec(119880)) = M(119880) then we areable to evaluate the Jacobian of 119891 using the basic propertiesof the Kronecker product which is an (2119899
2
+ 119901119903) times (21198992
+ 119901119903)
matrix
Theorem 8 Let 119880 = (119871 119865119870) isin D119904times R119899times119899 be given The
Jacobian matrix ofM(119880) is given by
nablaM(119880)119879
= (
(119862119871119862119879
+ 119877119890) otimes (119861
119879
119870119861 + 119877) 119862 otimes 119870119865
119871119879
119865otimes 119861119879
[119871119865otimes 119861 + 119870
119899119899(119871119865otimes 119861)] 119878
1198650
[119870119903119899(119862119879
otimes119870119879
119865)+(119862
119879
otimes119870119879
119865)] 0 119878
119879
119865
)
(25)
where119870119865and119871
119865are as defined in Lemma 4 119878
119865= minus1198681198992+119860(119865)otimes
119860(119865) and119870119898119899
is an119898119899 times119898119899 commutation matrix defined asvec(119882119879) = 119870
119903119899vec(119882) for any119898times119899matrix119882 Furthermore
the linear system (23) is explicitly written as
nablaM(119880)119879 vec (119880) = minus vec (M) (26)
Journal of Applied Mathematics 5
wherevec (M)
= (
vec (119870119865119871119862119879
+ (119861119879
119870119861 + 119877)119865119877119890)
vec (minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
)
vec (minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865))
)
(27)
Proof For any given threematrices119860119861 and119862 of appropriatedimensions the linear matrix equation
119860119883119861 = 119862 (28)
is equivalent to the explicit linear system
(119861119879
otimes 119860) vec (119883) = vec (119862) (29)
If we apply this result on the above linear system the entriesof the Jacobian matrix can be easily obtained
Indeed the last result shows that the dimension ofthe Jacobian matrix (25) can be very large because of theKronecker productsMoreover the evaluation of the Jacobianmatrix explicitly in the SQP method is unnecessary andmakes the method impractical By taking this fact in mindthe reducedHessian approach is rather considered as an idealcandidate for finding the local solution of theNSDP (10)ndash(12)see for example [2 16]
31 The Reduced Hessian Approach The reduced Hessianapproach relies on the existence of the null space and theright inverse of the Jacobian nabla119867
119879 In optimal control suchoperators are not available explicitly However it is possibleto construct them from the problem itself for more detailssee for example [2 16 25] The two operators are defined as
119885 (119871 119865) = (minus119867minus1
119871(119871 119865)119867
119865(119871 119865) 119868
119901)
(119871 119865) = (minus119867minus1
119871(119871 119865) 0)
(30)
where 119868119901and 0 are the identity and the zero operators
respectively We note that if the Jacobian nabla119867119879 is surjective
then such a right inverse exists We also note that the rangespace of119885 coincides with the null space of the Jacobian nabla119867
119879see [16 Lemma 2]
Next with the help of 119885 and the following result showsthat the linearized equality constraint is decomposed into twodiscrete Lyapunov equations
Lemma 9 Let (119871 119865) isin D119904be given and let (Δ119871 Δ119865) isin
R119899times119899+119901times119903 be the solution of the QP (19) Then the linearizedequality constraint of (19) is decomposed into the followingdiscrete Lyapunov equations
Δ119871119899
= 119860 (119865) Δ119871119899
(119860119865)119879
+ 119867 (119871 119865) (31)
Δ119871119905
= 119860 (119865) Δ119871119905
119860(119865)119879
+ 119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
(32)
where 119871119865is as given in Lemma 5
Proof (see also [16 Lemma 3]) The linearized equalityconstraint of (19) can be rewritten as
nabla119871119867(119871 119865) Δ119871
119905
+ nabla119865119867(119871 119865) Δ119865
+ nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0
(33)
where Δ119871 = Δ119871119899
+ Δ119871119905 According to the definition of 119885 and
the above equation can be decomposed as
nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0 forallΔ119871119899
119867119871(119871 119865) Δ119871
119905
(Δ119865) + 119867119865(119871 119865) Δ119865 = 0 forallΔ119865
(34)
which yield the discrete Lyapunov equations (31) and (32)respectively
Following the proof of Lemma 9 the step (Δ119871 Δ119865) thatsolves the QP (19) with the help of 119885 and is decomposed as
(Δ119871 Δ119865) = 119885 (119871 119865) Δ119865 + (119871 119865)119867 (119871 119865)
= (Δ119871119905
(Δ119865) Δ119865) + (Δ119871119899
0)
(35)
where (Δ119871119905(Δ119865) Δ119865) and (Δ119871119899
0) are the tangential and thenormal steps respectively
Consequently one can obtain the normal step (Δ119871119899
0) bysolving the discrete Lyapunov equation (31) for Δ119871119899 Havingobtained such a step component we solve the followingtangential subproblem for Δ119865
minΔ119865isinR119901times119903
120595 (Δ119865) = 119902 (Δ119871119905
(Δ119865) Δ119865)
= ⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩ + ⟨Δ119865 nabla
119865ℓ (sdot)⟩
+ ⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119899
⟩
+ ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119899
⟩
+1
2⟨Δ119865 119885
119879
nabla2
ℓ (sdot) 119885Δ119865⟩
(36)
where
⟨Δ119865 119885119879
nabla2
ℓ (sdot) 119885Δ119865⟩ = ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
+ ⟨Δ119865 nabla2
119865119865ℓ (sdot) Δ119865⟩
+ 2⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
(37)
and Δ119871119905
(Δ119865) is the corresponding solution of the discreteLyapunov equation (32)
In order to find the local solution of the minimizationproblem (36) let us apply the necessary optimality conditionswhich give the following result
Lemma 10 Let (119871 119865 119870) isin D119904times R119899times119899 and Δ119871
119899
isin R119899times119899
be given Moreover let Δ119865 isin R119901times119903 be a local minimum for
6 Journal of Applied Mathematics
the problem (36) Then Δ119865 solves the following linear matrixequation
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119905
(Δ119865)119862119879
+ 119861119879
Δ119870 (Δ119865) 119871119865
= minus119870119865(119871 + Δ119871
119899
) 119862119879
minus (119861119879
119870119861 + 119877)119865119877119890minus 119861119879
119878119871119865
(38)
where Δ119871119905(Δ119865) Δ119870(Δ119865) and 119878 respectively solve the discreteLyapunov equations (32) and
Δ119870 = 119860(119865)119879
Δ119870119860 (119865) + 119870119879
119865Δ119865119862 + 119862
119879
Δ119865119879
119870119865 (39)
119878 = 119860(119865)119879
119878119860 (119865) +119872 +119872119879
(40)
where119870119865and 119871
119865are as defined in Lemma 4 and
119872 = minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865) (41)
Proof We use the derivatives of ℓ given in Lemma 4 toconstruct 120595(Δ119865) If we differentiate 120595 with respect to Δ119865 andapply the necessary optimality conditions we obtain
119885119879
nabla2
ℓ (sdot) 119885Δ119865
= minusnabla119865ℓ (sdot) minus nabla
2
119865119871Δ119871119899
minus120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
(42)
which is another representation of (38) As an example ofevaluating these derivatives we obtain the last term of (42)as follows
120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
=120597
120597Δ119865Tr (119872Δ119871
119905
(Δ119865))
=120597
120597Δ119865Tr(119872
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865
+119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
)
= 119861119879
(
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
)119871119865
= 119861119879
119878119871119865
(43)
where
Δ119871119905
(Δ119865) =
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
119878 =
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
(44)
are the exact solutions of the discrete Lyapunov equations (32)and (40) respectively
Because of using directional derivatives the resultinglinear system (38)ndash(40) is not given explicitly Howeverone can modify the conjugate gradient (CG) method [17]and solve this system iteratively The problem structure isexploited where the partition of the unknown 119883 = (119871 119865)
is utilizedFor a given Δ119865 calculated by the CG method both of
Δ119871119905
(Δ119865) andΔ119870(Δ119865) are uniquely determined by solving thediscrete Lyapunov equations (32) and (39) respectively TheCG algorithm for solving the system (38)ndash(40) is stated in thefollowing lines wherewe use119879
119894119863119894 and119864
119894at the 119894th CG inner
iteration to denote the approximation of the step componentΔ119865 the CG direction and the residual respectively
Algorithm 11 (modified CG method) Let 119880 = (119871 119865119870) isin
D119904times R119899times119899 and Δ119871
119899 be given Moreover let 119860 119861 119862 119876 119877119877119890 and 119881 be given constant matrices Set 119879
0= 0 119864
0=
minus119870119865119871119862119879
minus (119861119879
119870119861 + 119877)119865119877119890 and 119863
0= 1198640 Choose 120578 and
120598 isin (0 1)
For 119894 = 0 1 do
(1) Solve for Δ119871119905(119863119894) and Δ119870(119863
119894) the discrete Lyapunov
equations (32) and (39) respectively(2) Calculate
119873(119863119894)
= (119861119879
119870119861 + 119877)119863119894(119862119871119862
119879
+ 119877119890)
+ 119870119865Δ119871119905
(119863119894) 119862119879
+ 119861119879
Δ119870 (119863119894) 119871119865
(45)
(3) If Tr(119863119879119894119873(119863119894)) le 120598119863
1198942 update the step Δ119865 as
follows if 119894 = 0 set Δ119865 = 1198630 else set Δ119865 = 119879
119894and
exit(4) Calculate the ratio 120579
119894= Tr(119864119879
119894119864119894)Tr(119863119879
119894119873(119863119894)) Set
119879119894+1
= 119879119894+ 120579119894119863119894and 119864
119894+1= 119864119894minus 120579119894119873(119863119894)
(5) If 119864119894+1
le 1205781198640 set Δ119865 = 119879
119894+1and exit
(6) Calculate the ratio
120573119894=Tr (119864119879119894+1
119864119894+1
)
Tr (119864119879119894119864119894)
(46)
Set119863119894+1
= 119864119894+1
+ 120573119894119863119894 119894 = 119894 + 1 and go to (1)
End (do)
There are two exits in this CGmethodThe first one takesplace when a negative or zero curvature is encountered by thecalculated search direction The second exit occurs when thenorm of the new residual is sufficiently small
Having evaluated both of Δ119871119899119896and (Δ119871
119905
(Δ119865119896) Δ119865119896) then
according to the step decomposition (35) the total step(Δ119871119896 Δ119865119896) is obtained Consequently the new iterate takes
the form
(119871119896+1
119865119896+1
) = (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) (47)
where 120572119896
gt 0 is the step size Starting from 1205720
= 1 wecalculate the step size 120572
119896by a backtracking rule (eg by
Journal of Applied Mathematics 7
halving 120572) until we satisfy the following sufficient decreasecondition
Φ120583119896 (119871119896+ 120572119896Δ119871 119865119896+ 120572119896Δ119865)
le Φ120583119896
119896+ 120591120572119896[Φ120583119896
119871(119871119896 119865119896) Δ119871 + Φ
120583119896
119865(119871119896 119865119896) Δ119865]
(48)
where 120591 isin (0 12) is a given parameter Let 119896be the achieved
step size Starting from that 119896we satisfy the following
stability condition by backtracking in the same way until an120572119896gt 0 is reached such that
119871119896+ 120572119896Δ119871119896≻ 0 119884 (119871
119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) ≻ 0
(49)
We assume that there always exists an 120572119896gt 0 such that
(48) is satisfied If 120572 is decreased and reached a lower bound120572min gt 0 without fulfilling (49) then we might follow oneof the ideas often used in modifying the Hessian matrix ofNewton-based methods see for example [17 Section 63]Let119882
119896denote any of the twomatrices 119871
119896+120572minΔ119871119896 or119884(119871119896+
120572minΔ119871119896 119865119896 + 120572minΔ119865119896) with a spectral decomposition119882119896=
119876Λ119876119879 A correction matrix Δ119882
119896of minimum Frobenius
norm that ensures 120582min(119882119896 + Δ119882119896) ge 120575 gt 0 is given by
Δ119882119896= 119876 diag (119905
119894) 119876119879
(50)
where
119905119894=
0 120582119894gt 120575
120575 minus 120582119894
otherwise(51)
The modified matrix is
119882119896+ Δ119882
119896= 119876 (Λ + diag (119905
119894)) 119876119879
(52)
where 120582min(119882119896) means the smallest eigenvalue of 119882119896 Note
that the nature of the stability constraint is an inactiveconstraint for most test problems
The Matlab function [sim 119895] = cholinc(119872) of the incom-plete Cholesky factorization can be used for checking thepositive definiteness where the indicator 119895 is used for thatpurpose On the other hand as mentioned at the end ofSection 2 we can check the stability condition via the spectralradius of the closed-loop system matrix namely 120588(119860(119865
119896+
120572119896Δ119865119896)) lt 1
We use as a merit function the following 1198971-penalty
function for globalizing the SQP method
Φ120583
(119871 119865) = 119869 (119871 119865) + 120583119867 (119871 119865)1 (53)
where 120583 gt 0 is the penalty parameter This function isdirectionally differentiable
The following update rule for the penalty parameter 120583 isconsidered (see eg [17 page 547])
120583119896=
120583119896minus1
if 120583119896minus1
ge1003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 1205741003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 2120574 otherwise(54)
where 120574 gt 0 is a given constant andΔ119870119896is obtained by solving
the discrete Lyapunov equation (39)The following algorithm demonstrates the SQP method
that finds the local solution of the NSDP (10)ndash(12)
Algorithm 12 (the method DSQP) Let (1198710 1198650 1198700) isin D
119904times
R119899times119899 be given Moreover let 119860 119861 119862 119876 119877 119877119890 and 119881 be
given constant matrices Choose 120591 isin (0 12) 120574 gt 0 and120598tol isin (0 1)
While nabla119880ℓ119896 gt 120598tol do
(1) Calculate Δ119871119899
119896solution of the discrete Lyapunov
equation (31)
(2) For a given Δ119871119899
119896calculate the local solution
(Δ119871119905
(Δ119865119896) Δ119865119896) of the problem (36) by Algorithm 11
Then set (Δ119871119896 Δ119865119896) = (Δ119871
119899
119896 0) + (Δ119871
119905
(Δ119865119896) Δ119865119896)
(3) Calculate Δ119870119896by solving (39) and then update the
penalty parameter 120583119896using (54)
(4) Starting from 1205720= 1 apply a backtracking step-size
rule that satisfies the sufficient decrease conditions(48)
(5) If (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896)) notin D
119904 then maintain the
positive definiteness of (49) as described above
(6) Set 119865119896+1
= 119865119896+ 120572119896Δ119865119896 119871119896+1
= 119871119896+ 120572119896Δ119871119896 119870119896+1
=
119870119896+ 120572119896Δ119870119896 and 119896 = 119896 + 1 then go to step (1)
End (While)
Step (5) of Algorithm 12 can also be modified as followsSet119865119896+1
= 119865119896+120572119896Δ119865119896Then obtain119871
119896+1= 119871(119865
119896+1) and119870
119896+1=
119870(119865119896+1
) by solving the discrete Lyapunov equations (17) and(18) respectively This means we project the search directionfrom the spaceD
119904to the control-variable space R119901times119903
The global convergence behavior of the method DSQP isbeyond the scope of this work However we state some of themain global convergence results which can be shown underthe following general assumptions
Assumption 13 In addition to Assumption 6 we furtherassume that the functions 119869 and 119867 together with theirderivatives are in Ω sube D
119904 We further assume that the
operator 119867minus1
119871is uniformly bounded in D
119904 furthermore
we assume that the sequences nabla2ℓ119896 119871119896 119865119896 119870119896 and
119885(119871119896 119865119896) are all bounded inΩ
The next lemma provides an upper bound for the direc-tional derivative of themerit function by the computed searchdirection
Lemma 14 Let (Δ119871 Δ119865 Δ119870) be generated by the SQP iter-ation (21) Then the directional derivative of Φ120583(119871 119865) in thedirection (Δ119871 Δ119865) satisfies
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
le minus [ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865)]
minus [120583 minus Δ119870infin] 1198671
(55)
8 Journal of Applied Mathematics
where the directional derivatives of Φ120583(119871 119865) are given by
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
= 119869119871(119871 119865) Δ119871 + 119869
119865(119871 119865) Δ119865 minus 120583119867 (119871 119865)
1
= Tr (Δ119871119876 (119865)) + 2Tr (Δ119865119879119877119865 (119862119871119862119879
+ 119877119890))
minus 120583119867 (119871 119865)1
(56)
Proof See [17 Lemma 182]
Following [17 Theorem 183] the search direction com-puted by the method DSQP is descent for the merit functionΦ
Theorem 15 Suppose that (119871119896 119865119896) isin D
119904is not a stationary
point of theNSDP (10)ndash(12) and the reducedHessian119885119896nabla2
ℓ119896119885119896
is positive definite Then the search direction (Δ119871119896 Δ119865119896) by the
method DSQP is a descent direction for the merit functionΦ if120583 is updated by (54)
4 Initial Feasible Solution
As can be seen in Algorithm 12 an initial (1198710 1198650) isin D
119904is
required to start the method DSQP Such a matrix pair canbe obtained by using any method that calculates suboptimalsolutions (see eg [21 Algorithm Fstab]) or by a pole assign-ment method see for example [18] Another alternative isto parameterize the system matrix 119860 such that 120588(119860) lt 1
and therefore 1198650can be chosen as the zero matrix Hence
according to Lemma 3 one can obtain 1198710≻ 0 by solving the
discrete Lyapunov equation (17)This idea is described in [16]and is stated herein for completeness In the parametrizationapproach one replaces the system matrix 119860 by 119860
119905= (1 minus
119905)119860 where 0 le 119905 lt 1 is a parameter Then instead ofsolving the NSDP problem (10)ndash(12) we solve the followingparameterized problem
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
st 119867119905(119871 119865) = minus119871 + 119860
119905(119865) 119871119860
119905(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
=0
119884119905(119871 119865)=119871minus(119860
119905+119861119865119862) 119871(119860
119905+119861119865119862)
119879
≻0 119871≻0
(57)
where 119860119905(119865) = 119860
119905+ 119861119865119862 and the constant matrices 119860 119861 119862
119876119877119890 and119881 are as defined in Section 2Thematrix pair (119871 119865)
must be chosen from the following parameterized set
D119905
119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884119905(119871 119865) ≻ 0 (58)
Obviously as 119905 rarr 0 the setD119905119904approaches the setD
119904
The initialization of the method DSQP can be as followsStarting from 119905
0= 0 where 119905
0isin [0 1) we choose 119905
0as the
first candidate such that 120588(1198601199050
) lt 1 and set 1198650= 0 Having
(1199050 1198650) then initial 119871
0and119870
0can be obtained by solving the
discrete Lyapunov equations
119871 = 1198601199050
(1198650) 1198711198601199050
(1198650)119879
+ 119881
119870 = 1198601199050
(1198650)119879
1198701198601199050
(1198650) + 119876
(59)
Then Algorithm 12 can be applied directly on the parame-terized problem (57) but after replacing 119860(119865) by 119860
119905(119865) The
parameter 119905 is updated in the main iteration loop accordingto the decreasing sequence 119905
119896
119905119896+1
= 119888119896119905119896 (60)
where 119888119896 darr 0 As mentioned above we choose 119905
0isin [0 1) as
the first candidate such that 120588(1198601199050
) lt 1 starting from 1199050= 0
On the other hand we might test the method DSQP forfinding feasible points of the problem (57) that is findingpoints that satisfy the equality constraints as well as thepositive definite constraints This can be achieved if we solvethe problem with zero objective function For that purposewe set the objective function and all its derivatives to bezero in Algorithm 12 As a result and with the exceptionof (15) the simplification of all formulas has no drawbackson Algorithm 12 In that case the zero term of the objectivefunction in (15) implies (18) to reduce to
119870 = 119860119905(119865)119879
119870119860119905(119865) (61)
which cannot be used in its current form to update themultiplier 119870 as suggested in Algorithm 12 because it yieldsthe trivial solution119870 = 0 In order to overcome this difficultythe multiplier is updated instead by the modified equation
119870 = 119860119905(119865)119879
119870119860119905(119865) + 119868
119899 (62)
5 Numerical Results
This section includes an implementation of the methodDSQP using Matlab Moreover the method DSQP is com-pared versus Newtonrsquos method (NM) [9] applied on theminimization problem (5)-(6) Four test problems fromthe benchmark collection COMPlib [8] are considered indetail in addition to an application of a hydraulic turbine[26] The benchmark COMPlib includes mainly continuous-time test problems Therefore the function c2d from thecontrol system toolbox of Matlab is considered to convert thecontinuous-time model to the discrete-time counterpart
For those test problems with 120588(119860) lt 1 according toLemma 3 it is possible to start the method DSQP with 119865
0= 0
and to obtain 1198710by solving the discrete Lyapunov equation
(17) However for test problems with 120588(119860) ge 1 an initial(1198710 1198650) isin D
119904is required otherwise the parametrization
approach described in Section 4 can be appliedThe functiondlyap from the control system toolbox of Matlab is usedfor calculating the approximate solutions of the discreteLyapunov equations For all test problems the tolerance is120598tol = 1 times 10
minus6 The constant weight matrices 119876 and 119877 andthe covariancematrices119881 and119877
119890are taken as the unit matrix
Journal of Applied Mathematics 9
Table 1 Convergence behavior of the method DSQP for Example16
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 31135119890 + 005 84992119890 + 007 99838119890 minus 001 02 21007119890 + 005 37773119890 + 007 99745119890 minus 001 13 14256119890 + 005 16786119890 + 007 99581119890 minus 001 1
19 15151119890 + 003 28400119890 minus 003 96853119890 minus 001 620 15151119890 + 003 76411119890 minus 005 96853119890 minus 001 621 15151119890 + 003 90844119890 minus 009 96853119890 minus 001 8
Example 16 The first test problem is a supersonic transportaircraft under Mach 27 flight condition see [8 AC16] Thediscrete-time data matrices are as follows
119860 =[[[
[
09901 00012 00000 minus00994
minus00315 10000 00989 00014
minus06269 minus00004 09773 00376
01237 00001 00016 09892
]]]
]
119861 =[[[
[
00005 00004
00004 00040
00078 00794
minus00086 minus00066
]]]
]
119862 = 1198684
(63)
Given the data matrices119860 119861 119862119876 119877 119877119890 and119881 the goal is to
calculate a local solution (119871lowast 119865lowast) isin D
119904of the NSDP problem
(10)ndash(12) using the method DSQP The corresponding 119865lowastis
considered as an approximate solution of the design problem(2)ndash(4) The open-loop system is discrete-time Schur stablebecause 120588(119860) = 09989 lt 1 Hence according to Lemma 3one can choose 119865
0= 0 and obtain 119871
0≻ 0 the corresponding
solution of the discrete Lyapunov equation (17) The twomethods NM and DSQP converge to the same local mini-mum after 25 and 21 iterations respectively Moreover wehave also tested the method DSQP for finding feasible pointsas explained at the end of Section 4 The achieved KKT andfeasible points are respectively
119865lowast= [
minus16109 01684 06795 63050
40166 minus08769 minus14994 minus29913]
119865feas = [minus1075749 88006 107506 1297845
183855 minus128539 minus139596 minus131650]
(64)
where 119871lowastand 119871 feas are the corresponding solutions of the dis-
crete Lyapunov equation (17) Table 1 shows the convergencebehavior of the method DSQP to the local solution
The method DSQP converges to a local minimum in lessnumber of iterations than the method NM for most of theconsidered test problemsThe next examples have also such abehavior
Example 17 This test problem is the discrete version of atransport aircraft model [8 AC8] The problem has the
dimensions 119899 = 9 119901 = 1 and 119903 = 5 Therefore we do notlist the data matrices 119860 119861 and 119862
The open-loop system of this example is not discrete-timeSchur stable where 120588(119860) = 10012 gt 1 The two methodsNM and DSQP are considered with the parametrizationapproach where 119905
0= 0002 and 119888
119896= (08)
119896 Both methodssuccessfully converge to the same local minimum after 21and 18 iterations respectivelyThe achieved KKT and feasiblepoints are respectively
119865lowast= [21458 minus05334 minus14506 00386 10690]
119865feas = [25640 minus06294 minus16525 00469 12302]
(65)
where 119871lowastand 119871 feas are the corresponding solutions of the
discrete Lyapunov equation (17)Table 2 shows the behavior of the two methods while
converging to the local solution The objective functions andthe convergence criteria are listed columnwise in that tableThe two methods show fast local convergence rate startingfrom 119865
0= 0
Figure 1 shows the state variables for the open- andclosed-loop systems of the current example where theachieved output feedback controller matrix 119865
lowastenforces all
state variables to decay to the zero state
Example 18 This test problem is the decentralized intercon-nected system [8 DIS3] The problem has the dimensions119899 = 8 119901 = 4 and 119903 = 4 Therefore we do not list the datamatrices 119860 119861 and 119862
The open-loop system for this example is discrete-timeSchur stable where 120588(119860) = 09620 lt 1 Starting from1198650= 0 where 119871
0is the corresponding solution of (17) the
methodDSQP successfully converges to aKKTpoint (119871lowast 119865lowast)
in 14 iterations while the method NM requires 16 iterationsto converge to the same local minimum Furthermore themethod DSQP requires 17 iterations to reach a feasible pointBoth of the KKT and the feasible points are respectively
119865lowast=[[[
[
minus17344 minus05988 minus01937 00938
02451 minus01286 04894 minus05011
00037 minus00705 minus03206 00853
00606 minus02429 minus01231 minus01806
]]]
]
119865feas =[[[
[
minus105946 minus07911 minus04047 07671
55324 minus21539 35120 minus31956
02289 minus18917 minus120235 19402
04861 minus22963 minus03051 minus20438
]]]
]
(66)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Furthermore Table 3 shows the convergence behavior of themethod DSQP to the local solution (119871
lowast 119865lowast) isin D
119904
Example 19 This test problem represents a nuclear reactormodel [8 REA3]The dimensions of this example are 119899 = 12119901 = 1 and 119903 = 3 Therefore we skip listing the data matrices119860 119861 and 119862
The open-loop system for this example is not discrete-time Schur stable By applying the parametrization approach
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Journal of Applied Mathematics 5
wherevec (M)
= (
vec (119870119865119871119862119879
+ (119861119879
119870119861 + 119877)119865119877119890)
vec (minus119871 + 119860 (119865) 119871119860(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
)
vec (minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865))
)
(27)
Proof For any given threematrices119860119861 and119862 of appropriatedimensions the linear matrix equation
119860119883119861 = 119862 (28)
is equivalent to the explicit linear system
(119861119879
otimes 119860) vec (119883) = vec (119862) (29)
If we apply this result on the above linear system the entriesof the Jacobian matrix can be easily obtained
Indeed the last result shows that the dimension ofthe Jacobian matrix (25) can be very large because of theKronecker productsMoreover the evaluation of the Jacobianmatrix explicitly in the SQP method is unnecessary andmakes the method impractical By taking this fact in mindthe reducedHessian approach is rather considered as an idealcandidate for finding the local solution of theNSDP (10)ndash(12)see for example [2 16]
31 The Reduced Hessian Approach The reduced Hessianapproach relies on the existence of the null space and theright inverse of the Jacobian nabla119867
119879 In optimal control suchoperators are not available explicitly However it is possibleto construct them from the problem itself for more detailssee for example [2 16 25] The two operators are defined as
119885 (119871 119865) = (minus119867minus1
119871(119871 119865)119867
119865(119871 119865) 119868
119901)
(119871 119865) = (minus119867minus1
119871(119871 119865) 0)
(30)
where 119868119901and 0 are the identity and the zero operators
respectively We note that if the Jacobian nabla119867119879 is surjective
then such a right inverse exists We also note that the rangespace of119885 coincides with the null space of the Jacobian nabla119867
119879see [16 Lemma 2]
Next with the help of 119885 and the following result showsthat the linearized equality constraint is decomposed into twodiscrete Lyapunov equations
Lemma 9 Let (119871 119865) isin D119904be given and let (Δ119871 Δ119865) isin
R119899times119899+119901times119903 be the solution of the QP (19) Then the linearizedequality constraint of (19) is decomposed into the followingdiscrete Lyapunov equations
Δ119871119899
= 119860 (119865) Δ119871119899
(119860119865)119879
+ 119867 (119871 119865) (31)
Δ119871119905
= 119860 (119865) Δ119871119905
119860(119865)119879
+ 119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
(32)
where 119871119865is as given in Lemma 5
Proof (see also [16 Lemma 3]) The linearized equalityconstraint of (19) can be rewritten as
nabla119871119867(119871 119865) Δ119871
119905
+ nabla119865119867(119871 119865) Δ119865
+ nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0
(33)
where Δ119871 = Δ119871119899
+ Δ119871119905 According to the definition of 119885 and
the above equation can be decomposed as
nabla119871119867(119871 119865) Δ119871
119899
+ 119867 (119871 119865) = 0 forallΔ119871119899
119867119871(119871 119865) Δ119871
119905
(Δ119865) + 119867119865(119871 119865) Δ119865 = 0 forallΔ119865
(34)
which yield the discrete Lyapunov equations (31) and (32)respectively
Following the proof of Lemma 9 the step (Δ119871 Δ119865) thatsolves the QP (19) with the help of 119885 and is decomposed as
(Δ119871 Δ119865) = 119885 (119871 119865) Δ119865 + (119871 119865)119867 (119871 119865)
= (Δ119871119905
(Δ119865) Δ119865) + (Δ119871119899
0)
(35)
where (Δ119871119905(Δ119865) Δ119865) and (Δ119871119899
0) are the tangential and thenormal steps respectively
Consequently one can obtain the normal step (Δ119871119899
0) bysolving the discrete Lyapunov equation (31) for Δ119871119899 Havingobtained such a step component we solve the followingtangential subproblem for Δ119865
minΔ119865isinR119901times119903
120595 (Δ119865) = 119902 (Δ119871119905
(Δ119865) Δ119865)
= ⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩ + ⟨Δ119865 nabla
119865ℓ (sdot)⟩
+ ⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119899
⟩
+ ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119899
⟩
+1
2⟨Δ119865 119885
119879
nabla2
ℓ (sdot) 119885Δ119865⟩
(36)
where
⟨Δ119865 119885119879
nabla2
ℓ (sdot) 119885Δ119865⟩ = ⟨Δ119871119905
(Δ119865) nabla2
119871119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
+ ⟨Δ119865 nabla2
119865119865ℓ (sdot) Δ119865⟩
+ 2⟨Δ119865 nabla2
119865119871ℓ (sdot) Δ119871
119905
(Δ119865)⟩
(37)
and Δ119871119905
(Δ119865) is the corresponding solution of the discreteLyapunov equation (32)
In order to find the local solution of the minimizationproblem (36) let us apply the necessary optimality conditionswhich give the following result
Lemma 10 Let (119871 119865 119870) isin D119904times R119899times119899 and Δ119871
119899
isin R119899times119899
be given Moreover let Δ119865 isin R119901times119903 be a local minimum for
6 Journal of Applied Mathematics
the problem (36) Then Δ119865 solves the following linear matrixequation
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119905
(Δ119865)119862119879
+ 119861119879
Δ119870 (Δ119865) 119871119865
= minus119870119865(119871 + Δ119871
119899
) 119862119879
minus (119861119879
119870119861 + 119877)119865119877119890minus 119861119879
119878119871119865
(38)
where Δ119871119905(Δ119865) Δ119870(Δ119865) and 119878 respectively solve the discreteLyapunov equations (32) and
Δ119870 = 119860(119865)119879
Δ119870119860 (119865) + 119870119879
119865Δ119865119862 + 119862
119879
Δ119865119879
119870119865 (39)
119878 = 119860(119865)119879
119878119860 (119865) +119872 +119872119879
(40)
where119870119865and 119871
119865are as defined in Lemma 4 and
119872 = minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865) (41)
Proof We use the derivatives of ℓ given in Lemma 4 toconstruct 120595(Δ119865) If we differentiate 120595 with respect to Δ119865 andapply the necessary optimality conditions we obtain
119885119879
nabla2
ℓ (sdot) 119885Δ119865
= minusnabla119865ℓ (sdot) minus nabla
2
119865119871Δ119871119899
minus120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
(42)
which is another representation of (38) As an example ofevaluating these derivatives we obtain the last term of (42)as follows
120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
=120597
120597Δ119865Tr (119872Δ119871
119905
(Δ119865))
=120597
120597Δ119865Tr(119872
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865
+119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
)
= 119861119879
(
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
)119871119865
= 119861119879
119878119871119865
(43)
where
Δ119871119905
(Δ119865) =
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
119878 =
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
(44)
are the exact solutions of the discrete Lyapunov equations (32)and (40) respectively
Because of using directional derivatives the resultinglinear system (38)ndash(40) is not given explicitly Howeverone can modify the conjugate gradient (CG) method [17]and solve this system iteratively The problem structure isexploited where the partition of the unknown 119883 = (119871 119865)
is utilizedFor a given Δ119865 calculated by the CG method both of
Δ119871119905
(Δ119865) andΔ119870(Δ119865) are uniquely determined by solving thediscrete Lyapunov equations (32) and (39) respectively TheCG algorithm for solving the system (38)ndash(40) is stated in thefollowing lines wherewe use119879
119894119863119894 and119864
119894at the 119894th CG inner
iteration to denote the approximation of the step componentΔ119865 the CG direction and the residual respectively
Algorithm 11 (modified CG method) Let 119880 = (119871 119865119870) isin
D119904times R119899times119899 and Δ119871
119899 be given Moreover let 119860 119861 119862 119876 119877119877119890 and 119881 be given constant matrices Set 119879
0= 0 119864
0=
minus119870119865119871119862119879
minus (119861119879
119870119861 + 119877)119865119877119890 and 119863
0= 1198640 Choose 120578 and
120598 isin (0 1)
For 119894 = 0 1 do
(1) Solve for Δ119871119905(119863119894) and Δ119870(119863
119894) the discrete Lyapunov
equations (32) and (39) respectively(2) Calculate
119873(119863119894)
= (119861119879
119870119861 + 119877)119863119894(119862119871119862
119879
+ 119877119890)
+ 119870119865Δ119871119905
(119863119894) 119862119879
+ 119861119879
Δ119870 (119863119894) 119871119865
(45)
(3) If Tr(119863119879119894119873(119863119894)) le 120598119863
1198942 update the step Δ119865 as
follows if 119894 = 0 set Δ119865 = 1198630 else set Δ119865 = 119879
119894and
exit(4) Calculate the ratio 120579
119894= Tr(119864119879
119894119864119894)Tr(119863119879
119894119873(119863119894)) Set
119879119894+1
= 119879119894+ 120579119894119863119894and 119864
119894+1= 119864119894minus 120579119894119873(119863119894)
(5) If 119864119894+1
le 1205781198640 set Δ119865 = 119879
119894+1and exit
(6) Calculate the ratio
120573119894=Tr (119864119879119894+1
119864119894+1
)
Tr (119864119879119894119864119894)
(46)
Set119863119894+1
= 119864119894+1
+ 120573119894119863119894 119894 = 119894 + 1 and go to (1)
End (do)
There are two exits in this CGmethodThe first one takesplace when a negative or zero curvature is encountered by thecalculated search direction The second exit occurs when thenorm of the new residual is sufficiently small
Having evaluated both of Δ119871119899119896and (Δ119871
119905
(Δ119865119896) Δ119865119896) then
according to the step decomposition (35) the total step(Δ119871119896 Δ119865119896) is obtained Consequently the new iterate takes
the form
(119871119896+1
119865119896+1
) = (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) (47)
where 120572119896
gt 0 is the step size Starting from 1205720
= 1 wecalculate the step size 120572
119896by a backtracking rule (eg by
Journal of Applied Mathematics 7
halving 120572) until we satisfy the following sufficient decreasecondition
Φ120583119896 (119871119896+ 120572119896Δ119871 119865119896+ 120572119896Δ119865)
le Φ120583119896
119896+ 120591120572119896[Φ120583119896
119871(119871119896 119865119896) Δ119871 + Φ
120583119896
119865(119871119896 119865119896) Δ119865]
(48)
where 120591 isin (0 12) is a given parameter Let 119896be the achieved
step size Starting from that 119896we satisfy the following
stability condition by backtracking in the same way until an120572119896gt 0 is reached such that
119871119896+ 120572119896Δ119871119896≻ 0 119884 (119871
119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) ≻ 0
(49)
We assume that there always exists an 120572119896gt 0 such that
(48) is satisfied If 120572 is decreased and reached a lower bound120572min gt 0 without fulfilling (49) then we might follow oneof the ideas often used in modifying the Hessian matrix ofNewton-based methods see for example [17 Section 63]Let119882
119896denote any of the twomatrices 119871
119896+120572minΔ119871119896 or119884(119871119896+
120572minΔ119871119896 119865119896 + 120572minΔ119865119896) with a spectral decomposition119882119896=
119876Λ119876119879 A correction matrix Δ119882
119896of minimum Frobenius
norm that ensures 120582min(119882119896 + Δ119882119896) ge 120575 gt 0 is given by
Δ119882119896= 119876 diag (119905
119894) 119876119879
(50)
where
119905119894=
0 120582119894gt 120575
120575 minus 120582119894
otherwise(51)
The modified matrix is
119882119896+ Δ119882
119896= 119876 (Λ + diag (119905
119894)) 119876119879
(52)
where 120582min(119882119896) means the smallest eigenvalue of 119882119896 Note
that the nature of the stability constraint is an inactiveconstraint for most test problems
The Matlab function [sim 119895] = cholinc(119872) of the incom-plete Cholesky factorization can be used for checking thepositive definiteness where the indicator 119895 is used for thatpurpose On the other hand as mentioned at the end ofSection 2 we can check the stability condition via the spectralradius of the closed-loop system matrix namely 120588(119860(119865
119896+
120572119896Δ119865119896)) lt 1
We use as a merit function the following 1198971-penalty
function for globalizing the SQP method
Φ120583
(119871 119865) = 119869 (119871 119865) + 120583119867 (119871 119865)1 (53)
where 120583 gt 0 is the penalty parameter This function isdirectionally differentiable
The following update rule for the penalty parameter 120583 isconsidered (see eg [17 page 547])
120583119896=
120583119896minus1
if 120583119896minus1
ge1003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 1205741003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 2120574 otherwise(54)
where 120574 gt 0 is a given constant andΔ119870119896is obtained by solving
the discrete Lyapunov equation (39)The following algorithm demonstrates the SQP method
that finds the local solution of the NSDP (10)ndash(12)
Algorithm 12 (the method DSQP) Let (1198710 1198650 1198700) isin D
119904times
R119899times119899 be given Moreover let 119860 119861 119862 119876 119877 119877119890 and 119881 be
given constant matrices Choose 120591 isin (0 12) 120574 gt 0 and120598tol isin (0 1)
While nabla119880ℓ119896 gt 120598tol do
(1) Calculate Δ119871119899
119896solution of the discrete Lyapunov
equation (31)
(2) For a given Δ119871119899
119896calculate the local solution
(Δ119871119905
(Δ119865119896) Δ119865119896) of the problem (36) by Algorithm 11
Then set (Δ119871119896 Δ119865119896) = (Δ119871
119899
119896 0) + (Δ119871
119905
(Δ119865119896) Δ119865119896)
(3) Calculate Δ119870119896by solving (39) and then update the
penalty parameter 120583119896using (54)
(4) Starting from 1205720= 1 apply a backtracking step-size
rule that satisfies the sufficient decrease conditions(48)
(5) If (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896)) notin D
119904 then maintain the
positive definiteness of (49) as described above
(6) Set 119865119896+1
= 119865119896+ 120572119896Δ119865119896 119871119896+1
= 119871119896+ 120572119896Δ119871119896 119870119896+1
=
119870119896+ 120572119896Δ119870119896 and 119896 = 119896 + 1 then go to step (1)
End (While)
Step (5) of Algorithm 12 can also be modified as followsSet119865119896+1
= 119865119896+120572119896Δ119865119896Then obtain119871
119896+1= 119871(119865
119896+1) and119870
119896+1=
119870(119865119896+1
) by solving the discrete Lyapunov equations (17) and(18) respectively This means we project the search directionfrom the spaceD
119904to the control-variable space R119901times119903
The global convergence behavior of the method DSQP isbeyond the scope of this work However we state some of themain global convergence results which can be shown underthe following general assumptions
Assumption 13 In addition to Assumption 6 we furtherassume that the functions 119869 and 119867 together with theirderivatives are in Ω sube D
119904 We further assume that the
operator 119867minus1
119871is uniformly bounded in D
119904 furthermore
we assume that the sequences nabla2ℓ119896 119871119896 119865119896 119870119896 and
119885(119871119896 119865119896) are all bounded inΩ
The next lemma provides an upper bound for the direc-tional derivative of themerit function by the computed searchdirection
Lemma 14 Let (Δ119871 Δ119865 Δ119870) be generated by the SQP iter-ation (21) Then the directional derivative of Φ120583(119871 119865) in thedirection (Δ119871 Δ119865) satisfies
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
le minus [ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865)]
minus [120583 minus Δ119870infin] 1198671
(55)
8 Journal of Applied Mathematics
where the directional derivatives of Φ120583(119871 119865) are given by
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
= 119869119871(119871 119865) Δ119871 + 119869
119865(119871 119865) Δ119865 minus 120583119867 (119871 119865)
1
= Tr (Δ119871119876 (119865)) + 2Tr (Δ119865119879119877119865 (119862119871119862119879
+ 119877119890))
minus 120583119867 (119871 119865)1
(56)
Proof See [17 Lemma 182]
Following [17 Theorem 183] the search direction com-puted by the method DSQP is descent for the merit functionΦ
Theorem 15 Suppose that (119871119896 119865119896) isin D
119904is not a stationary
point of theNSDP (10)ndash(12) and the reducedHessian119885119896nabla2
ℓ119896119885119896
is positive definite Then the search direction (Δ119871119896 Δ119865119896) by the
method DSQP is a descent direction for the merit functionΦ if120583 is updated by (54)
4 Initial Feasible Solution
As can be seen in Algorithm 12 an initial (1198710 1198650) isin D
119904is
required to start the method DSQP Such a matrix pair canbe obtained by using any method that calculates suboptimalsolutions (see eg [21 Algorithm Fstab]) or by a pole assign-ment method see for example [18] Another alternative isto parameterize the system matrix 119860 such that 120588(119860) lt 1
and therefore 1198650can be chosen as the zero matrix Hence
according to Lemma 3 one can obtain 1198710≻ 0 by solving the
discrete Lyapunov equation (17)This idea is described in [16]and is stated herein for completeness In the parametrizationapproach one replaces the system matrix 119860 by 119860
119905= (1 minus
119905)119860 where 0 le 119905 lt 1 is a parameter Then instead ofsolving the NSDP problem (10)ndash(12) we solve the followingparameterized problem
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
st 119867119905(119871 119865) = minus119871 + 119860
119905(119865) 119871119860
119905(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
=0
119884119905(119871 119865)=119871minus(119860
119905+119861119865119862) 119871(119860
119905+119861119865119862)
119879
≻0 119871≻0
(57)
where 119860119905(119865) = 119860
119905+ 119861119865119862 and the constant matrices 119860 119861 119862
119876119877119890 and119881 are as defined in Section 2Thematrix pair (119871 119865)
must be chosen from the following parameterized set
D119905
119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884119905(119871 119865) ≻ 0 (58)
Obviously as 119905 rarr 0 the setD119905119904approaches the setD
119904
The initialization of the method DSQP can be as followsStarting from 119905
0= 0 where 119905
0isin [0 1) we choose 119905
0as the
first candidate such that 120588(1198601199050
) lt 1 and set 1198650= 0 Having
(1199050 1198650) then initial 119871
0and119870
0can be obtained by solving the
discrete Lyapunov equations
119871 = 1198601199050
(1198650) 1198711198601199050
(1198650)119879
+ 119881
119870 = 1198601199050
(1198650)119879
1198701198601199050
(1198650) + 119876
(59)
Then Algorithm 12 can be applied directly on the parame-terized problem (57) but after replacing 119860(119865) by 119860
119905(119865) The
parameter 119905 is updated in the main iteration loop accordingto the decreasing sequence 119905
119896
119905119896+1
= 119888119896119905119896 (60)
where 119888119896 darr 0 As mentioned above we choose 119905
0isin [0 1) as
the first candidate such that 120588(1198601199050
) lt 1 starting from 1199050= 0
On the other hand we might test the method DSQP forfinding feasible points of the problem (57) that is findingpoints that satisfy the equality constraints as well as thepositive definite constraints This can be achieved if we solvethe problem with zero objective function For that purposewe set the objective function and all its derivatives to bezero in Algorithm 12 As a result and with the exceptionof (15) the simplification of all formulas has no drawbackson Algorithm 12 In that case the zero term of the objectivefunction in (15) implies (18) to reduce to
119870 = 119860119905(119865)119879
119870119860119905(119865) (61)
which cannot be used in its current form to update themultiplier 119870 as suggested in Algorithm 12 because it yieldsthe trivial solution119870 = 0 In order to overcome this difficultythe multiplier is updated instead by the modified equation
119870 = 119860119905(119865)119879
119870119860119905(119865) + 119868
119899 (62)
5 Numerical Results
This section includes an implementation of the methodDSQP using Matlab Moreover the method DSQP is com-pared versus Newtonrsquos method (NM) [9] applied on theminimization problem (5)-(6) Four test problems fromthe benchmark collection COMPlib [8] are considered indetail in addition to an application of a hydraulic turbine[26] The benchmark COMPlib includes mainly continuous-time test problems Therefore the function c2d from thecontrol system toolbox of Matlab is considered to convert thecontinuous-time model to the discrete-time counterpart
For those test problems with 120588(119860) lt 1 according toLemma 3 it is possible to start the method DSQP with 119865
0= 0
and to obtain 1198710by solving the discrete Lyapunov equation
(17) However for test problems with 120588(119860) ge 1 an initial(1198710 1198650) isin D
119904is required otherwise the parametrization
approach described in Section 4 can be appliedThe functiondlyap from the control system toolbox of Matlab is usedfor calculating the approximate solutions of the discreteLyapunov equations For all test problems the tolerance is120598tol = 1 times 10
minus6 The constant weight matrices 119876 and 119877 andthe covariancematrices119881 and119877
119890are taken as the unit matrix
Journal of Applied Mathematics 9
Table 1 Convergence behavior of the method DSQP for Example16
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 31135119890 + 005 84992119890 + 007 99838119890 minus 001 02 21007119890 + 005 37773119890 + 007 99745119890 minus 001 13 14256119890 + 005 16786119890 + 007 99581119890 minus 001 1
19 15151119890 + 003 28400119890 minus 003 96853119890 minus 001 620 15151119890 + 003 76411119890 minus 005 96853119890 minus 001 621 15151119890 + 003 90844119890 minus 009 96853119890 minus 001 8
Example 16 The first test problem is a supersonic transportaircraft under Mach 27 flight condition see [8 AC16] Thediscrete-time data matrices are as follows
119860 =[[[
[
09901 00012 00000 minus00994
minus00315 10000 00989 00014
minus06269 minus00004 09773 00376
01237 00001 00016 09892
]]]
]
119861 =[[[
[
00005 00004
00004 00040
00078 00794
minus00086 minus00066
]]]
]
119862 = 1198684
(63)
Given the data matrices119860 119861 119862119876 119877 119877119890 and119881 the goal is to
calculate a local solution (119871lowast 119865lowast) isin D
119904of the NSDP problem
(10)ndash(12) using the method DSQP The corresponding 119865lowastis
considered as an approximate solution of the design problem(2)ndash(4) The open-loop system is discrete-time Schur stablebecause 120588(119860) = 09989 lt 1 Hence according to Lemma 3one can choose 119865
0= 0 and obtain 119871
0≻ 0 the corresponding
solution of the discrete Lyapunov equation (17) The twomethods NM and DSQP converge to the same local mini-mum after 25 and 21 iterations respectively Moreover wehave also tested the method DSQP for finding feasible pointsas explained at the end of Section 4 The achieved KKT andfeasible points are respectively
119865lowast= [
minus16109 01684 06795 63050
40166 minus08769 minus14994 minus29913]
119865feas = [minus1075749 88006 107506 1297845
183855 minus128539 minus139596 minus131650]
(64)
where 119871lowastand 119871 feas are the corresponding solutions of the dis-
crete Lyapunov equation (17) Table 1 shows the convergencebehavior of the method DSQP to the local solution
The method DSQP converges to a local minimum in lessnumber of iterations than the method NM for most of theconsidered test problemsThe next examples have also such abehavior
Example 17 This test problem is the discrete version of atransport aircraft model [8 AC8] The problem has the
dimensions 119899 = 9 119901 = 1 and 119903 = 5 Therefore we do notlist the data matrices 119860 119861 and 119862
The open-loop system of this example is not discrete-timeSchur stable where 120588(119860) = 10012 gt 1 The two methodsNM and DSQP are considered with the parametrizationapproach where 119905
0= 0002 and 119888
119896= (08)
119896 Both methodssuccessfully converge to the same local minimum after 21and 18 iterations respectivelyThe achieved KKT and feasiblepoints are respectively
119865lowast= [21458 minus05334 minus14506 00386 10690]
119865feas = [25640 minus06294 minus16525 00469 12302]
(65)
where 119871lowastand 119871 feas are the corresponding solutions of the
discrete Lyapunov equation (17)Table 2 shows the behavior of the two methods while
converging to the local solution The objective functions andthe convergence criteria are listed columnwise in that tableThe two methods show fast local convergence rate startingfrom 119865
0= 0
Figure 1 shows the state variables for the open- andclosed-loop systems of the current example where theachieved output feedback controller matrix 119865
lowastenforces all
state variables to decay to the zero state
Example 18 This test problem is the decentralized intercon-nected system [8 DIS3] The problem has the dimensions119899 = 8 119901 = 4 and 119903 = 4 Therefore we do not list the datamatrices 119860 119861 and 119862
The open-loop system for this example is discrete-timeSchur stable where 120588(119860) = 09620 lt 1 Starting from1198650= 0 where 119871
0is the corresponding solution of (17) the
methodDSQP successfully converges to aKKTpoint (119871lowast 119865lowast)
in 14 iterations while the method NM requires 16 iterationsto converge to the same local minimum Furthermore themethod DSQP requires 17 iterations to reach a feasible pointBoth of the KKT and the feasible points are respectively
119865lowast=[[[
[
minus17344 minus05988 minus01937 00938
02451 minus01286 04894 minus05011
00037 minus00705 minus03206 00853
00606 minus02429 minus01231 minus01806
]]]
]
119865feas =[[[
[
minus105946 minus07911 minus04047 07671
55324 minus21539 35120 minus31956
02289 minus18917 minus120235 19402
04861 minus22963 minus03051 minus20438
]]]
]
(66)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Furthermore Table 3 shows the convergence behavior of themethod DSQP to the local solution (119871
lowast 119865lowast) isin D
119904
Example 19 This test problem represents a nuclear reactormodel [8 REA3]The dimensions of this example are 119899 = 12119901 = 1 and 119903 = 3 Therefore we skip listing the data matrices119860 119861 and 119862
The open-loop system for this example is not discrete-time Schur stable By applying the parametrization approach
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Journal of Applied Mathematics
the problem (36) Then Δ119865 solves the following linear matrixequation
(119861119879
119870119861 + 119877)Δ119865 (119862119871119862119879
+ 119877119890) + 119870119865Δ119871119905
(Δ119865)119862119879
+ 119861119879
Δ119870 (Δ119865) 119871119865
= minus119870119865(119871 + Δ119871
119899
) 119862119879
minus (119861119879
119870119861 + 119877)119865119877119890minus 119861119879
119878119871119865
(38)
where Δ119871119905(Δ119865) Δ119870(Δ119865) and 119878 respectively solve the discreteLyapunov equations (32) and
Δ119870 = 119860(119865)119879
Δ119870119860 (119865) + 119870119879
119865Δ119865119862 + 119862
119879
Δ119865119879
119870119865 (39)
119878 = 119860(119865)119879
119878119860 (119865) +119872 +119872119879
(40)
where119870119865and 119871
119865are as defined in Lemma 4 and
119872 = minus119870 + 119860(119865)119879
119870119860 (119865) + 119876 (119865) (41)
Proof We use the derivatives of ℓ given in Lemma 4 toconstruct 120595(Δ119865) If we differentiate 120595 with respect to Δ119865 andapply the necessary optimality conditions we obtain
119885119879
nabla2
ℓ (sdot) 119885Δ119865
= minusnabla119865ℓ (sdot) minus nabla
2
119865119871Δ119871119899
minus120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
(42)
which is another representation of (38) As an example ofevaluating these derivatives we obtain the last term of (42)as follows
120597
120597Δ119865⟨Δ119871119905
(Δ119865) nabla119871ℓ (sdot)⟩
=120597
120597Δ119865Tr (119872Δ119871
119905
(Δ119865))
=120597
120597Δ119865Tr(119872
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865
+119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
)
= 119861119879
(
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
)119871119865
= 119861119879
119878119871119865
(43)
where
Δ119871119905
(Δ119865) =
infin
sum
119896=0
119860(119865)119896
(119861Δ119865119871119879
119865+ 119871119865Δ119865119879
119861119879
) (119860(119865)119879
)119896
119878 =
infin
sum
119896=0
(119860(119865)119879
)119896
(119872 +119872119879
)119860(119865)119896
(44)
are the exact solutions of the discrete Lyapunov equations (32)and (40) respectively
Because of using directional derivatives the resultinglinear system (38)ndash(40) is not given explicitly Howeverone can modify the conjugate gradient (CG) method [17]and solve this system iteratively The problem structure isexploited where the partition of the unknown 119883 = (119871 119865)
is utilizedFor a given Δ119865 calculated by the CG method both of
Δ119871119905
(Δ119865) andΔ119870(Δ119865) are uniquely determined by solving thediscrete Lyapunov equations (32) and (39) respectively TheCG algorithm for solving the system (38)ndash(40) is stated in thefollowing lines wherewe use119879
119894119863119894 and119864
119894at the 119894th CG inner
iteration to denote the approximation of the step componentΔ119865 the CG direction and the residual respectively
Algorithm 11 (modified CG method) Let 119880 = (119871 119865119870) isin
D119904times R119899times119899 and Δ119871
119899 be given Moreover let 119860 119861 119862 119876 119877119877119890 and 119881 be given constant matrices Set 119879
0= 0 119864
0=
minus119870119865119871119862119879
minus (119861119879
119870119861 + 119877)119865119877119890 and 119863
0= 1198640 Choose 120578 and
120598 isin (0 1)
For 119894 = 0 1 do
(1) Solve for Δ119871119905(119863119894) and Δ119870(119863
119894) the discrete Lyapunov
equations (32) and (39) respectively(2) Calculate
119873(119863119894)
= (119861119879
119870119861 + 119877)119863119894(119862119871119862
119879
+ 119877119890)
+ 119870119865Δ119871119905
(119863119894) 119862119879
+ 119861119879
Δ119870 (119863119894) 119871119865
(45)
(3) If Tr(119863119879119894119873(119863119894)) le 120598119863
1198942 update the step Δ119865 as
follows if 119894 = 0 set Δ119865 = 1198630 else set Δ119865 = 119879
119894and
exit(4) Calculate the ratio 120579
119894= Tr(119864119879
119894119864119894)Tr(119863119879
119894119873(119863119894)) Set
119879119894+1
= 119879119894+ 120579119894119863119894and 119864
119894+1= 119864119894minus 120579119894119873(119863119894)
(5) If 119864119894+1
le 1205781198640 set Δ119865 = 119879
119894+1and exit
(6) Calculate the ratio
120573119894=Tr (119864119879119894+1
119864119894+1
)
Tr (119864119879119894119864119894)
(46)
Set119863119894+1
= 119864119894+1
+ 120573119894119863119894 119894 = 119894 + 1 and go to (1)
End (do)
There are two exits in this CGmethodThe first one takesplace when a negative or zero curvature is encountered by thecalculated search direction The second exit occurs when thenorm of the new residual is sufficiently small
Having evaluated both of Δ119871119899119896and (Δ119871
119905
(Δ119865119896) Δ119865119896) then
according to the step decomposition (35) the total step(Δ119871119896 Δ119865119896) is obtained Consequently the new iterate takes
the form
(119871119896+1
119865119896+1
) = (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) (47)
where 120572119896
gt 0 is the step size Starting from 1205720
= 1 wecalculate the step size 120572
119896by a backtracking rule (eg by
Journal of Applied Mathematics 7
halving 120572) until we satisfy the following sufficient decreasecondition
Φ120583119896 (119871119896+ 120572119896Δ119871 119865119896+ 120572119896Δ119865)
le Φ120583119896
119896+ 120591120572119896[Φ120583119896
119871(119871119896 119865119896) Δ119871 + Φ
120583119896
119865(119871119896 119865119896) Δ119865]
(48)
where 120591 isin (0 12) is a given parameter Let 119896be the achieved
step size Starting from that 119896we satisfy the following
stability condition by backtracking in the same way until an120572119896gt 0 is reached such that
119871119896+ 120572119896Δ119871119896≻ 0 119884 (119871
119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) ≻ 0
(49)
We assume that there always exists an 120572119896gt 0 such that
(48) is satisfied If 120572 is decreased and reached a lower bound120572min gt 0 without fulfilling (49) then we might follow oneof the ideas often used in modifying the Hessian matrix ofNewton-based methods see for example [17 Section 63]Let119882
119896denote any of the twomatrices 119871
119896+120572minΔ119871119896 or119884(119871119896+
120572minΔ119871119896 119865119896 + 120572minΔ119865119896) with a spectral decomposition119882119896=
119876Λ119876119879 A correction matrix Δ119882
119896of minimum Frobenius
norm that ensures 120582min(119882119896 + Δ119882119896) ge 120575 gt 0 is given by
Δ119882119896= 119876 diag (119905
119894) 119876119879
(50)
where
119905119894=
0 120582119894gt 120575
120575 minus 120582119894
otherwise(51)
The modified matrix is
119882119896+ Δ119882
119896= 119876 (Λ + diag (119905
119894)) 119876119879
(52)
where 120582min(119882119896) means the smallest eigenvalue of 119882119896 Note
that the nature of the stability constraint is an inactiveconstraint for most test problems
The Matlab function [sim 119895] = cholinc(119872) of the incom-plete Cholesky factorization can be used for checking thepositive definiteness where the indicator 119895 is used for thatpurpose On the other hand as mentioned at the end ofSection 2 we can check the stability condition via the spectralradius of the closed-loop system matrix namely 120588(119860(119865
119896+
120572119896Δ119865119896)) lt 1
We use as a merit function the following 1198971-penalty
function for globalizing the SQP method
Φ120583
(119871 119865) = 119869 (119871 119865) + 120583119867 (119871 119865)1 (53)
where 120583 gt 0 is the penalty parameter This function isdirectionally differentiable
The following update rule for the penalty parameter 120583 isconsidered (see eg [17 page 547])
120583119896=
120583119896minus1
if 120583119896minus1
ge1003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 1205741003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 2120574 otherwise(54)
where 120574 gt 0 is a given constant andΔ119870119896is obtained by solving
the discrete Lyapunov equation (39)The following algorithm demonstrates the SQP method
that finds the local solution of the NSDP (10)ndash(12)
Algorithm 12 (the method DSQP) Let (1198710 1198650 1198700) isin D
119904times
R119899times119899 be given Moreover let 119860 119861 119862 119876 119877 119877119890 and 119881 be
given constant matrices Choose 120591 isin (0 12) 120574 gt 0 and120598tol isin (0 1)
While nabla119880ℓ119896 gt 120598tol do
(1) Calculate Δ119871119899
119896solution of the discrete Lyapunov
equation (31)
(2) For a given Δ119871119899
119896calculate the local solution
(Δ119871119905
(Δ119865119896) Δ119865119896) of the problem (36) by Algorithm 11
Then set (Δ119871119896 Δ119865119896) = (Δ119871
119899
119896 0) + (Δ119871
119905
(Δ119865119896) Δ119865119896)
(3) Calculate Δ119870119896by solving (39) and then update the
penalty parameter 120583119896using (54)
(4) Starting from 1205720= 1 apply a backtracking step-size
rule that satisfies the sufficient decrease conditions(48)
(5) If (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896)) notin D
119904 then maintain the
positive definiteness of (49) as described above
(6) Set 119865119896+1
= 119865119896+ 120572119896Δ119865119896 119871119896+1
= 119871119896+ 120572119896Δ119871119896 119870119896+1
=
119870119896+ 120572119896Δ119870119896 and 119896 = 119896 + 1 then go to step (1)
End (While)
Step (5) of Algorithm 12 can also be modified as followsSet119865119896+1
= 119865119896+120572119896Δ119865119896Then obtain119871
119896+1= 119871(119865
119896+1) and119870
119896+1=
119870(119865119896+1
) by solving the discrete Lyapunov equations (17) and(18) respectively This means we project the search directionfrom the spaceD
119904to the control-variable space R119901times119903
The global convergence behavior of the method DSQP isbeyond the scope of this work However we state some of themain global convergence results which can be shown underthe following general assumptions
Assumption 13 In addition to Assumption 6 we furtherassume that the functions 119869 and 119867 together with theirderivatives are in Ω sube D
119904 We further assume that the
operator 119867minus1
119871is uniformly bounded in D
119904 furthermore
we assume that the sequences nabla2ℓ119896 119871119896 119865119896 119870119896 and
119885(119871119896 119865119896) are all bounded inΩ
The next lemma provides an upper bound for the direc-tional derivative of themerit function by the computed searchdirection
Lemma 14 Let (Δ119871 Δ119865 Δ119870) be generated by the SQP iter-ation (21) Then the directional derivative of Φ120583(119871 119865) in thedirection (Δ119871 Δ119865) satisfies
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
le minus [ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865)]
minus [120583 minus Δ119870infin] 1198671
(55)
8 Journal of Applied Mathematics
where the directional derivatives of Φ120583(119871 119865) are given by
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
= 119869119871(119871 119865) Δ119871 + 119869
119865(119871 119865) Δ119865 minus 120583119867 (119871 119865)
1
= Tr (Δ119871119876 (119865)) + 2Tr (Δ119865119879119877119865 (119862119871119862119879
+ 119877119890))
minus 120583119867 (119871 119865)1
(56)
Proof See [17 Lemma 182]
Following [17 Theorem 183] the search direction com-puted by the method DSQP is descent for the merit functionΦ
Theorem 15 Suppose that (119871119896 119865119896) isin D
119904is not a stationary
point of theNSDP (10)ndash(12) and the reducedHessian119885119896nabla2
ℓ119896119885119896
is positive definite Then the search direction (Δ119871119896 Δ119865119896) by the
method DSQP is a descent direction for the merit functionΦ if120583 is updated by (54)
4 Initial Feasible Solution
As can be seen in Algorithm 12 an initial (1198710 1198650) isin D
119904is
required to start the method DSQP Such a matrix pair canbe obtained by using any method that calculates suboptimalsolutions (see eg [21 Algorithm Fstab]) or by a pole assign-ment method see for example [18] Another alternative isto parameterize the system matrix 119860 such that 120588(119860) lt 1
and therefore 1198650can be chosen as the zero matrix Hence
according to Lemma 3 one can obtain 1198710≻ 0 by solving the
discrete Lyapunov equation (17)This idea is described in [16]and is stated herein for completeness In the parametrizationapproach one replaces the system matrix 119860 by 119860
119905= (1 minus
119905)119860 where 0 le 119905 lt 1 is a parameter Then instead ofsolving the NSDP problem (10)ndash(12) we solve the followingparameterized problem
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
st 119867119905(119871 119865) = minus119871 + 119860
119905(119865) 119871119860
119905(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
=0
119884119905(119871 119865)=119871minus(119860
119905+119861119865119862) 119871(119860
119905+119861119865119862)
119879
≻0 119871≻0
(57)
where 119860119905(119865) = 119860
119905+ 119861119865119862 and the constant matrices 119860 119861 119862
119876119877119890 and119881 are as defined in Section 2Thematrix pair (119871 119865)
must be chosen from the following parameterized set
D119905
119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884119905(119871 119865) ≻ 0 (58)
Obviously as 119905 rarr 0 the setD119905119904approaches the setD
119904
The initialization of the method DSQP can be as followsStarting from 119905
0= 0 where 119905
0isin [0 1) we choose 119905
0as the
first candidate such that 120588(1198601199050
) lt 1 and set 1198650= 0 Having
(1199050 1198650) then initial 119871
0and119870
0can be obtained by solving the
discrete Lyapunov equations
119871 = 1198601199050
(1198650) 1198711198601199050
(1198650)119879
+ 119881
119870 = 1198601199050
(1198650)119879
1198701198601199050
(1198650) + 119876
(59)
Then Algorithm 12 can be applied directly on the parame-terized problem (57) but after replacing 119860(119865) by 119860
119905(119865) The
parameter 119905 is updated in the main iteration loop accordingto the decreasing sequence 119905
119896
119905119896+1
= 119888119896119905119896 (60)
where 119888119896 darr 0 As mentioned above we choose 119905
0isin [0 1) as
the first candidate such that 120588(1198601199050
) lt 1 starting from 1199050= 0
On the other hand we might test the method DSQP forfinding feasible points of the problem (57) that is findingpoints that satisfy the equality constraints as well as thepositive definite constraints This can be achieved if we solvethe problem with zero objective function For that purposewe set the objective function and all its derivatives to bezero in Algorithm 12 As a result and with the exceptionof (15) the simplification of all formulas has no drawbackson Algorithm 12 In that case the zero term of the objectivefunction in (15) implies (18) to reduce to
119870 = 119860119905(119865)119879
119870119860119905(119865) (61)
which cannot be used in its current form to update themultiplier 119870 as suggested in Algorithm 12 because it yieldsthe trivial solution119870 = 0 In order to overcome this difficultythe multiplier is updated instead by the modified equation
119870 = 119860119905(119865)119879
119870119860119905(119865) + 119868
119899 (62)
5 Numerical Results
This section includes an implementation of the methodDSQP using Matlab Moreover the method DSQP is com-pared versus Newtonrsquos method (NM) [9] applied on theminimization problem (5)-(6) Four test problems fromthe benchmark collection COMPlib [8] are considered indetail in addition to an application of a hydraulic turbine[26] The benchmark COMPlib includes mainly continuous-time test problems Therefore the function c2d from thecontrol system toolbox of Matlab is considered to convert thecontinuous-time model to the discrete-time counterpart
For those test problems with 120588(119860) lt 1 according toLemma 3 it is possible to start the method DSQP with 119865
0= 0
and to obtain 1198710by solving the discrete Lyapunov equation
(17) However for test problems with 120588(119860) ge 1 an initial(1198710 1198650) isin D
119904is required otherwise the parametrization
approach described in Section 4 can be appliedThe functiondlyap from the control system toolbox of Matlab is usedfor calculating the approximate solutions of the discreteLyapunov equations For all test problems the tolerance is120598tol = 1 times 10
minus6 The constant weight matrices 119876 and 119877 andthe covariancematrices119881 and119877
119890are taken as the unit matrix
Journal of Applied Mathematics 9
Table 1 Convergence behavior of the method DSQP for Example16
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 31135119890 + 005 84992119890 + 007 99838119890 minus 001 02 21007119890 + 005 37773119890 + 007 99745119890 minus 001 13 14256119890 + 005 16786119890 + 007 99581119890 minus 001 1
19 15151119890 + 003 28400119890 minus 003 96853119890 minus 001 620 15151119890 + 003 76411119890 minus 005 96853119890 minus 001 621 15151119890 + 003 90844119890 minus 009 96853119890 minus 001 8
Example 16 The first test problem is a supersonic transportaircraft under Mach 27 flight condition see [8 AC16] Thediscrete-time data matrices are as follows
119860 =[[[
[
09901 00012 00000 minus00994
minus00315 10000 00989 00014
minus06269 minus00004 09773 00376
01237 00001 00016 09892
]]]
]
119861 =[[[
[
00005 00004
00004 00040
00078 00794
minus00086 minus00066
]]]
]
119862 = 1198684
(63)
Given the data matrices119860 119861 119862119876 119877 119877119890 and119881 the goal is to
calculate a local solution (119871lowast 119865lowast) isin D
119904of the NSDP problem
(10)ndash(12) using the method DSQP The corresponding 119865lowastis
considered as an approximate solution of the design problem(2)ndash(4) The open-loop system is discrete-time Schur stablebecause 120588(119860) = 09989 lt 1 Hence according to Lemma 3one can choose 119865
0= 0 and obtain 119871
0≻ 0 the corresponding
solution of the discrete Lyapunov equation (17) The twomethods NM and DSQP converge to the same local mini-mum after 25 and 21 iterations respectively Moreover wehave also tested the method DSQP for finding feasible pointsas explained at the end of Section 4 The achieved KKT andfeasible points are respectively
119865lowast= [
minus16109 01684 06795 63050
40166 minus08769 minus14994 minus29913]
119865feas = [minus1075749 88006 107506 1297845
183855 minus128539 minus139596 minus131650]
(64)
where 119871lowastand 119871 feas are the corresponding solutions of the dis-
crete Lyapunov equation (17) Table 1 shows the convergencebehavior of the method DSQP to the local solution
The method DSQP converges to a local minimum in lessnumber of iterations than the method NM for most of theconsidered test problemsThe next examples have also such abehavior
Example 17 This test problem is the discrete version of atransport aircraft model [8 AC8] The problem has the
dimensions 119899 = 9 119901 = 1 and 119903 = 5 Therefore we do notlist the data matrices 119860 119861 and 119862
The open-loop system of this example is not discrete-timeSchur stable where 120588(119860) = 10012 gt 1 The two methodsNM and DSQP are considered with the parametrizationapproach where 119905
0= 0002 and 119888
119896= (08)
119896 Both methodssuccessfully converge to the same local minimum after 21and 18 iterations respectivelyThe achieved KKT and feasiblepoints are respectively
119865lowast= [21458 minus05334 minus14506 00386 10690]
119865feas = [25640 minus06294 minus16525 00469 12302]
(65)
where 119871lowastand 119871 feas are the corresponding solutions of the
discrete Lyapunov equation (17)Table 2 shows the behavior of the two methods while
converging to the local solution The objective functions andthe convergence criteria are listed columnwise in that tableThe two methods show fast local convergence rate startingfrom 119865
0= 0
Figure 1 shows the state variables for the open- andclosed-loop systems of the current example where theachieved output feedback controller matrix 119865
lowastenforces all
state variables to decay to the zero state
Example 18 This test problem is the decentralized intercon-nected system [8 DIS3] The problem has the dimensions119899 = 8 119901 = 4 and 119903 = 4 Therefore we do not list the datamatrices 119860 119861 and 119862
The open-loop system for this example is discrete-timeSchur stable where 120588(119860) = 09620 lt 1 Starting from1198650= 0 where 119871
0is the corresponding solution of (17) the
methodDSQP successfully converges to aKKTpoint (119871lowast 119865lowast)
in 14 iterations while the method NM requires 16 iterationsto converge to the same local minimum Furthermore themethod DSQP requires 17 iterations to reach a feasible pointBoth of the KKT and the feasible points are respectively
119865lowast=[[[
[
minus17344 minus05988 minus01937 00938
02451 minus01286 04894 minus05011
00037 minus00705 minus03206 00853
00606 minus02429 minus01231 minus01806
]]]
]
119865feas =[[[
[
minus105946 minus07911 minus04047 07671
55324 minus21539 35120 minus31956
02289 minus18917 minus120235 19402
04861 minus22963 minus03051 minus20438
]]]
]
(66)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Furthermore Table 3 shows the convergence behavior of themethod DSQP to the local solution (119871
lowast 119865lowast) isin D
119904
Example 19 This test problem represents a nuclear reactormodel [8 REA3]The dimensions of this example are 119899 = 12119901 = 1 and 119903 = 3 Therefore we skip listing the data matrices119860 119861 and 119862
The open-loop system for this example is not discrete-time Schur stable By applying the parametrization approach
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Journal of Applied Mathematics 7
halving 120572) until we satisfy the following sufficient decreasecondition
Φ120583119896 (119871119896+ 120572119896Δ119871 119865119896+ 120572119896Δ119865)
le Φ120583119896
119896+ 120591120572119896[Φ120583119896
119871(119871119896 119865119896) Δ119871 + Φ
120583119896
119865(119871119896 119865119896) Δ119865]
(48)
where 120591 isin (0 12) is a given parameter Let 119896be the achieved
step size Starting from that 119896we satisfy the following
stability condition by backtracking in the same way until an120572119896gt 0 is reached such that
119871119896+ 120572119896Δ119871119896≻ 0 119884 (119871
119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896) ≻ 0
(49)
We assume that there always exists an 120572119896gt 0 such that
(48) is satisfied If 120572 is decreased and reached a lower bound120572min gt 0 without fulfilling (49) then we might follow oneof the ideas often used in modifying the Hessian matrix ofNewton-based methods see for example [17 Section 63]Let119882
119896denote any of the twomatrices 119871
119896+120572minΔ119871119896 or119884(119871119896+
120572minΔ119871119896 119865119896 + 120572minΔ119865119896) with a spectral decomposition119882119896=
119876Λ119876119879 A correction matrix Δ119882
119896of minimum Frobenius
norm that ensures 120582min(119882119896 + Δ119882119896) ge 120575 gt 0 is given by
Δ119882119896= 119876 diag (119905
119894) 119876119879
(50)
where
119905119894=
0 120582119894gt 120575
120575 minus 120582119894
otherwise(51)
The modified matrix is
119882119896+ Δ119882
119896= 119876 (Λ + diag (119905
119894)) 119876119879
(52)
where 120582min(119882119896) means the smallest eigenvalue of 119882119896 Note
that the nature of the stability constraint is an inactiveconstraint for most test problems
The Matlab function [sim 119895] = cholinc(119872) of the incom-plete Cholesky factorization can be used for checking thepositive definiteness where the indicator 119895 is used for thatpurpose On the other hand as mentioned at the end ofSection 2 we can check the stability condition via the spectralradius of the closed-loop system matrix namely 120588(119860(119865
119896+
120572119896Δ119865119896)) lt 1
We use as a merit function the following 1198971-penalty
function for globalizing the SQP method
Φ120583
(119871 119865) = 119869 (119871 119865) + 120583119867 (119871 119865)1 (53)
where 120583 gt 0 is the penalty parameter This function isdirectionally differentiable
The following update rule for the penalty parameter 120583 isconsidered (see eg [17 page 547])
120583119896=
120583119896minus1
if 120583119896minus1
ge1003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 1205741003817100381710038171003817Δ119870119896
1003817100381710038171003817infin + 2120574 otherwise(54)
where 120574 gt 0 is a given constant andΔ119870119896is obtained by solving
the discrete Lyapunov equation (39)The following algorithm demonstrates the SQP method
that finds the local solution of the NSDP (10)ndash(12)
Algorithm 12 (the method DSQP) Let (1198710 1198650 1198700) isin D
119904times
R119899times119899 be given Moreover let 119860 119861 119862 119876 119877 119877119890 and 119881 be
given constant matrices Choose 120591 isin (0 12) 120574 gt 0 and120598tol isin (0 1)
While nabla119880ℓ119896 gt 120598tol do
(1) Calculate Δ119871119899
119896solution of the discrete Lyapunov
equation (31)
(2) For a given Δ119871119899
119896calculate the local solution
(Δ119871119905
(Δ119865119896) Δ119865119896) of the problem (36) by Algorithm 11
Then set (Δ119871119896 Δ119865119896) = (Δ119871
119899
119896 0) + (Δ119871
119905
(Δ119865119896) Δ119865119896)
(3) Calculate Δ119870119896by solving (39) and then update the
penalty parameter 120583119896using (54)
(4) Starting from 1205720= 1 apply a backtracking step-size
rule that satisfies the sufficient decrease conditions(48)
(5) If (119871119896+ 120572119896Δ119871119896 119865119896+ 120572119896Δ119865119896)) notin D
119904 then maintain the
positive definiteness of (49) as described above
(6) Set 119865119896+1
= 119865119896+ 120572119896Δ119865119896 119871119896+1
= 119871119896+ 120572119896Δ119871119896 119870119896+1
=
119870119896+ 120572119896Δ119870119896 and 119896 = 119896 + 1 then go to step (1)
End (While)
Step (5) of Algorithm 12 can also be modified as followsSet119865119896+1
= 119865119896+120572119896Δ119865119896Then obtain119871
119896+1= 119871(119865
119896+1) and119870
119896+1=
119870(119865119896+1
) by solving the discrete Lyapunov equations (17) and(18) respectively This means we project the search directionfrom the spaceD
119904to the control-variable space R119901times119903
The global convergence behavior of the method DSQP isbeyond the scope of this work However we state some of themain global convergence results which can be shown underthe following general assumptions
Assumption 13 In addition to Assumption 6 we furtherassume that the functions 119869 and 119867 together with theirderivatives are in Ω sube D
119904 We further assume that the
operator 119867minus1
119871is uniformly bounded in D
119904 furthermore
we assume that the sequences nabla2ℓ119896 119871119896 119865119896 119870119896 and
119885(119871119896 119865119896) are all bounded inΩ
The next lemma provides an upper bound for the direc-tional derivative of themerit function by the computed searchdirection
Lemma 14 Let (Δ119871 Δ119865 Δ119870) be generated by the SQP iter-ation (21) Then the directional derivative of Φ120583(119871 119865) in thedirection (Δ119871 Δ119865) satisfies
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
le minus [ℓ119871119871
(Δ119871 Δ119871) + 2ℓ119871119865
(Δ119871 Δ119865) + ℓ119865119865
(Δ119865 Δ119865)]
minus [120583 minus Δ119870infin] 1198671
(55)
8 Journal of Applied Mathematics
where the directional derivatives of Φ120583(119871 119865) are given by
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
= 119869119871(119871 119865) Δ119871 + 119869
119865(119871 119865) Δ119865 minus 120583119867 (119871 119865)
1
= Tr (Δ119871119876 (119865)) + 2Tr (Δ119865119879119877119865 (119862119871119862119879
+ 119877119890))
minus 120583119867 (119871 119865)1
(56)
Proof See [17 Lemma 182]
Following [17 Theorem 183] the search direction com-puted by the method DSQP is descent for the merit functionΦ
Theorem 15 Suppose that (119871119896 119865119896) isin D
119904is not a stationary
point of theNSDP (10)ndash(12) and the reducedHessian119885119896nabla2
ℓ119896119885119896
is positive definite Then the search direction (Δ119871119896 Δ119865119896) by the
method DSQP is a descent direction for the merit functionΦ if120583 is updated by (54)
4 Initial Feasible Solution
As can be seen in Algorithm 12 an initial (1198710 1198650) isin D
119904is
required to start the method DSQP Such a matrix pair canbe obtained by using any method that calculates suboptimalsolutions (see eg [21 Algorithm Fstab]) or by a pole assign-ment method see for example [18] Another alternative isto parameterize the system matrix 119860 such that 120588(119860) lt 1
and therefore 1198650can be chosen as the zero matrix Hence
according to Lemma 3 one can obtain 1198710≻ 0 by solving the
discrete Lyapunov equation (17)This idea is described in [16]and is stated herein for completeness In the parametrizationapproach one replaces the system matrix 119860 by 119860
119905= (1 minus
119905)119860 where 0 le 119905 lt 1 is a parameter Then instead ofsolving the NSDP problem (10)ndash(12) we solve the followingparameterized problem
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
st 119867119905(119871 119865) = minus119871 + 119860
119905(119865) 119871119860
119905(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
=0
119884119905(119871 119865)=119871minus(119860
119905+119861119865119862) 119871(119860
119905+119861119865119862)
119879
≻0 119871≻0
(57)
where 119860119905(119865) = 119860
119905+ 119861119865119862 and the constant matrices 119860 119861 119862
119876119877119890 and119881 are as defined in Section 2Thematrix pair (119871 119865)
must be chosen from the following parameterized set
D119905
119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884119905(119871 119865) ≻ 0 (58)
Obviously as 119905 rarr 0 the setD119905119904approaches the setD
119904
The initialization of the method DSQP can be as followsStarting from 119905
0= 0 where 119905
0isin [0 1) we choose 119905
0as the
first candidate such that 120588(1198601199050
) lt 1 and set 1198650= 0 Having
(1199050 1198650) then initial 119871
0and119870
0can be obtained by solving the
discrete Lyapunov equations
119871 = 1198601199050
(1198650) 1198711198601199050
(1198650)119879
+ 119881
119870 = 1198601199050
(1198650)119879
1198701198601199050
(1198650) + 119876
(59)
Then Algorithm 12 can be applied directly on the parame-terized problem (57) but after replacing 119860(119865) by 119860
119905(119865) The
parameter 119905 is updated in the main iteration loop accordingto the decreasing sequence 119905
119896
119905119896+1
= 119888119896119905119896 (60)
where 119888119896 darr 0 As mentioned above we choose 119905
0isin [0 1) as
the first candidate such that 120588(1198601199050
) lt 1 starting from 1199050= 0
On the other hand we might test the method DSQP forfinding feasible points of the problem (57) that is findingpoints that satisfy the equality constraints as well as thepositive definite constraints This can be achieved if we solvethe problem with zero objective function For that purposewe set the objective function and all its derivatives to bezero in Algorithm 12 As a result and with the exceptionof (15) the simplification of all formulas has no drawbackson Algorithm 12 In that case the zero term of the objectivefunction in (15) implies (18) to reduce to
119870 = 119860119905(119865)119879
119870119860119905(119865) (61)
which cannot be used in its current form to update themultiplier 119870 as suggested in Algorithm 12 because it yieldsthe trivial solution119870 = 0 In order to overcome this difficultythe multiplier is updated instead by the modified equation
119870 = 119860119905(119865)119879
119870119860119905(119865) + 119868
119899 (62)
5 Numerical Results
This section includes an implementation of the methodDSQP using Matlab Moreover the method DSQP is com-pared versus Newtonrsquos method (NM) [9] applied on theminimization problem (5)-(6) Four test problems fromthe benchmark collection COMPlib [8] are considered indetail in addition to an application of a hydraulic turbine[26] The benchmark COMPlib includes mainly continuous-time test problems Therefore the function c2d from thecontrol system toolbox of Matlab is considered to convert thecontinuous-time model to the discrete-time counterpart
For those test problems with 120588(119860) lt 1 according toLemma 3 it is possible to start the method DSQP with 119865
0= 0
and to obtain 1198710by solving the discrete Lyapunov equation
(17) However for test problems with 120588(119860) ge 1 an initial(1198710 1198650) isin D
119904is required otherwise the parametrization
approach described in Section 4 can be appliedThe functiondlyap from the control system toolbox of Matlab is usedfor calculating the approximate solutions of the discreteLyapunov equations For all test problems the tolerance is120598tol = 1 times 10
minus6 The constant weight matrices 119876 and 119877 andthe covariancematrices119881 and119877
119890are taken as the unit matrix
Journal of Applied Mathematics 9
Table 1 Convergence behavior of the method DSQP for Example16
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 31135119890 + 005 84992119890 + 007 99838119890 minus 001 02 21007119890 + 005 37773119890 + 007 99745119890 minus 001 13 14256119890 + 005 16786119890 + 007 99581119890 minus 001 1
19 15151119890 + 003 28400119890 minus 003 96853119890 minus 001 620 15151119890 + 003 76411119890 minus 005 96853119890 minus 001 621 15151119890 + 003 90844119890 minus 009 96853119890 minus 001 8
Example 16 The first test problem is a supersonic transportaircraft under Mach 27 flight condition see [8 AC16] Thediscrete-time data matrices are as follows
119860 =[[[
[
09901 00012 00000 minus00994
minus00315 10000 00989 00014
minus06269 minus00004 09773 00376
01237 00001 00016 09892
]]]
]
119861 =[[[
[
00005 00004
00004 00040
00078 00794
minus00086 minus00066
]]]
]
119862 = 1198684
(63)
Given the data matrices119860 119861 119862119876 119877 119877119890 and119881 the goal is to
calculate a local solution (119871lowast 119865lowast) isin D
119904of the NSDP problem
(10)ndash(12) using the method DSQP The corresponding 119865lowastis
considered as an approximate solution of the design problem(2)ndash(4) The open-loop system is discrete-time Schur stablebecause 120588(119860) = 09989 lt 1 Hence according to Lemma 3one can choose 119865
0= 0 and obtain 119871
0≻ 0 the corresponding
solution of the discrete Lyapunov equation (17) The twomethods NM and DSQP converge to the same local mini-mum after 25 and 21 iterations respectively Moreover wehave also tested the method DSQP for finding feasible pointsas explained at the end of Section 4 The achieved KKT andfeasible points are respectively
119865lowast= [
minus16109 01684 06795 63050
40166 minus08769 minus14994 minus29913]
119865feas = [minus1075749 88006 107506 1297845
183855 minus128539 minus139596 minus131650]
(64)
where 119871lowastand 119871 feas are the corresponding solutions of the dis-
crete Lyapunov equation (17) Table 1 shows the convergencebehavior of the method DSQP to the local solution
The method DSQP converges to a local minimum in lessnumber of iterations than the method NM for most of theconsidered test problemsThe next examples have also such abehavior
Example 17 This test problem is the discrete version of atransport aircraft model [8 AC8] The problem has the
dimensions 119899 = 9 119901 = 1 and 119903 = 5 Therefore we do notlist the data matrices 119860 119861 and 119862
The open-loop system of this example is not discrete-timeSchur stable where 120588(119860) = 10012 gt 1 The two methodsNM and DSQP are considered with the parametrizationapproach where 119905
0= 0002 and 119888
119896= (08)
119896 Both methodssuccessfully converge to the same local minimum after 21and 18 iterations respectivelyThe achieved KKT and feasiblepoints are respectively
119865lowast= [21458 minus05334 minus14506 00386 10690]
119865feas = [25640 minus06294 minus16525 00469 12302]
(65)
where 119871lowastand 119871 feas are the corresponding solutions of the
discrete Lyapunov equation (17)Table 2 shows the behavior of the two methods while
converging to the local solution The objective functions andthe convergence criteria are listed columnwise in that tableThe two methods show fast local convergence rate startingfrom 119865
0= 0
Figure 1 shows the state variables for the open- andclosed-loop systems of the current example where theachieved output feedback controller matrix 119865
lowastenforces all
state variables to decay to the zero state
Example 18 This test problem is the decentralized intercon-nected system [8 DIS3] The problem has the dimensions119899 = 8 119901 = 4 and 119903 = 4 Therefore we do not list the datamatrices 119860 119861 and 119862
The open-loop system for this example is discrete-timeSchur stable where 120588(119860) = 09620 lt 1 Starting from1198650= 0 where 119871
0is the corresponding solution of (17) the
methodDSQP successfully converges to aKKTpoint (119871lowast 119865lowast)
in 14 iterations while the method NM requires 16 iterationsto converge to the same local minimum Furthermore themethod DSQP requires 17 iterations to reach a feasible pointBoth of the KKT and the feasible points are respectively
119865lowast=[[[
[
minus17344 minus05988 minus01937 00938
02451 minus01286 04894 minus05011
00037 minus00705 minus03206 00853
00606 minus02429 minus01231 minus01806
]]]
]
119865feas =[[[
[
minus105946 minus07911 minus04047 07671
55324 minus21539 35120 minus31956
02289 minus18917 minus120235 19402
04861 minus22963 minus03051 minus20438
]]]
]
(66)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Furthermore Table 3 shows the convergence behavior of themethod DSQP to the local solution (119871
lowast 119865lowast) isin D
119904
Example 19 This test problem represents a nuclear reactormodel [8 REA3]The dimensions of this example are 119899 = 12119901 = 1 and 119903 = 3 Therefore we skip listing the data matrices119860 119861 and 119862
The open-loop system for this example is not discrete-time Schur stable By applying the parametrization approach
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Journal of Applied Mathematics
where the directional derivatives of Φ120583(119871 119865) are given by
Φ120583
119871Δ119871 + Φ
120583
119865Δ119865
= 119869119871(119871 119865) Δ119871 + 119869
119865(119871 119865) Δ119865 minus 120583119867 (119871 119865)
1
= Tr (Δ119871119876 (119865)) + 2Tr (Δ119865119879119877119865 (119862119871119862119879
+ 119877119890))
minus 120583119867 (119871 119865)1
(56)
Proof See [17 Lemma 182]
Following [17 Theorem 183] the search direction com-puted by the method DSQP is descent for the merit functionΦ
Theorem 15 Suppose that (119871119896 119865119896) isin D
119904is not a stationary
point of theNSDP (10)ndash(12) and the reducedHessian119885119896nabla2
ℓ119896119885119896
is positive definite Then the search direction (Δ119871119896 Δ119865119896) by the
method DSQP is a descent direction for the merit functionΦ if120583 is updated by (54)
4 Initial Feasible Solution
As can be seen in Algorithm 12 an initial (1198710 1198650) isin D
119904is
required to start the method DSQP Such a matrix pair canbe obtained by using any method that calculates suboptimalsolutions (see eg [21 Algorithm Fstab]) or by a pole assign-ment method see for example [18] Another alternative isto parameterize the system matrix 119860 such that 120588(119860) lt 1
and therefore 1198650can be chosen as the zero matrix Hence
according to Lemma 3 one can obtain 1198710≻ 0 by solving the
discrete Lyapunov equation (17)This idea is described in [16]and is stated herein for completeness In the parametrizationapproach one replaces the system matrix 119860 by 119860
119905= (1 minus
119905)119860 where 0 le 119905 lt 1 is a parameter Then instead ofsolving the NSDP problem (10)ndash(12) we solve the followingparameterized problem
min119871119865
119869 (119871 119865) = Tr (119871 (119876 + 119862119879
119865119879
119877119865119862)) + Tr (119865119879119877119865119877119890)
st 119867119905(119871 119865) = minus119871 + 119860
119905(119865) 119871119860
119905(119865)119879
+ 119881 + 119861119865119877119890119865119879
119861119879
=0
119884119905(119871 119865)=119871minus(119860
119905+119861119865119862) 119871(119860
119905+119861119865119862)
119879
≻0 119871≻0
(57)
where 119860119905(119865) = 119860
119905+ 119861119865119862 and the constant matrices 119860 119861 119862
119876119877119890 and119881 are as defined in Section 2Thematrix pair (119871 119865)
must be chosen from the following parameterized set
D119905
119904= (119871 119865) isin R
119899times119899
timesR119901times119903
119871 ≻ 0 119884119905(119871 119865) ≻ 0 (58)
Obviously as 119905 rarr 0 the setD119905119904approaches the setD
119904
The initialization of the method DSQP can be as followsStarting from 119905
0= 0 where 119905
0isin [0 1) we choose 119905
0as the
first candidate such that 120588(1198601199050
) lt 1 and set 1198650= 0 Having
(1199050 1198650) then initial 119871
0and119870
0can be obtained by solving the
discrete Lyapunov equations
119871 = 1198601199050
(1198650) 1198711198601199050
(1198650)119879
+ 119881
119870 = 1198601199050
(1198650)119879
1198701198601199050
(1198650) + 119876
(59)
Then Algorithm 12 can be applied directly on the parame-terized problem (57) but after replacing 119860(119865) by 119860
119905(119865) The
parameter 119905 is updated in the main iteration loop accordingto the decreasing sequence 119905
119896
119905119896+1
= 119888119896119905119896 (60)
where 119888119896 darr 0 As mentioned above we choose 119905
0isin [0 1) as
the first candidate such that 120588(1198601199050
) lt 1 starting from 1199050= 0
On the other hand we might test the method DSQP forfinding feasible points of the problem (57) that is findingpoints that satisfy the equality constraints as well as thepositive definite constraints This can be achieved if we solvethe problem with zero objective function For that purposewe set the objective function and all its derivatives to bezero in Algorithm 12 As a result and with the exceptionof (15) the simplification of all formulas has no drawbackson Algorithm 12 In that case the zero term of the objectivefunction in (15) implies (18) to reduce to
119870 = 119860119905(119865)119879
119870119860119905(119865) (61)
which cannot be used in its current form to update themultiplier 119870 as suggested in Algorithm 12 because it yieldsthe trivial solution119870 = 0 In order to overcome this difficultythe multiplier is updated instead by the modified equation
119870 = 119860119905(119865)119879
119870119860119905(119865) + 119868
119899 (62)
5 Numerical Results
This section includes an implementation of the methodDSQP using Matlab Moreover the method DSQP is com-pared versus Newtonrsquos method (NM) [9] applied on theminimization problem (5)-(6) Four test problems fromthe benchmark collection COMPlib [8] are considered indetail in addition to an application of a hydraulic turbine[26] The benchmark COMPlib includes mainly continuous-time test problems Therefore the function c2d from thecontrol system toolbox of Matlab is considered to convert thecontinuous-time model to the discrete-time counterpart
For those test problems with 120588(119860) lt 1 according toLemma 3 it is possible to start the method DSQP with 119865
0= 0
and to obtain 1198710by solving the discrete Lyapunov equation
(17) However for test problems with 120588(119860) ge 1 an initial(1198710 1198650) isin D
119904is required otherwise the parametrization
approach described in Section 4 can be appliedThe functiondlyap from the control system toolbox of Matlab is usedfor calculating the approximate solutions of the discreteLyapunov equations For all test problems the tolerance is120598tol = 1 times 10
minus6 The constant weight matrices 119876 and 119877 andthe covariancematrices119881 and119877
119890are taken as the unit matrix
Journal of Applied Mathematics 9
Table 1 Convergence behavior of the method DSQP for Example16
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 31135119890 + 005 84992119890 + 007 99838119890 minus 001 02 21007119890 + 005 37773119890 + 007 99745119890 minus 001 13 14256119890 + 005 16786119890 + 007 99581119890 minus 001 1
19 15151119890 + 003 28400119890 minus 003 96853119890 minus 001 620 15151119890 + 003 76411119890 minus 005 96853119890 minus 001 621 15151119890 + 003 90844119890 minus 009 96853119890 minus 001 8
Example 16 The first test problem is a supersonic transportaircraft under Mach 27 flight condition see [8 AC16] Thediscrete-time data matrices are as follows
119860 =[[[
[
09901 00012 00000 minus00994
minus00315 10000 00989 00014
minus06269 minus00004 09773 00376
01237 00001 00016 09892
]]]
]
119861 =[[[
[
00005 00004
00004 00040
00078 00794
minus00086 minus00066
]]]
]
119862 = 1198684
(63)
Given the data matrices119860 119861 119862119876 119877 119877119890 and119881 the goal is to
calculate a local solution (119871lowast 119865lowast) isin D
119904of the NSDP problem
(10)ndash(12) using the method DSQP The corresponding 119865lowastis
considered as an approximate solution of the design problem(2)ndash(4) The open-loop system is discrete-time Schur stablebecause 120588(119860) = 09989 lt 1 Hence according to Lemma 3one can choose 119865
0= 0 and obtain 119871
0≻ 0 the corresponding
solution of the discrete Lyapunov equation (17) The twomethods NM and DSQP converge to the same local mini-mum after 25 and 21 iterations respectively Moreover wehave also tested the method DSQP for finding feasible pointsas explained at the end of Section 4 The achieved KKT andfeasible points are respectively
119865lowast= [
minus16109 01684 06795 63050
40166 minus08769 minus14994 minus29913]
119865feas = [minus1075749 88006 107506 1297845
183855 minus128539 minus139596 minus131650]
(64)
where 119871lowastand 119871 feas are the corresponding solutions of the dis-
crete Lyapunov equation (17) Table 1 shows the convergencebehavior of the method DSQP to the local solution
The method DSQP converges to a local minimum in lessnumber of iterations than the method NM for most of theconsidered test problemsThe next examples have also such abehavior
Example 17 This test problem is the discrete version of atransport aircraft model [8 AC8] The problem has the
dimensions 119899 = 9 119901 = 1 and 119903 = 5 Therefore we do notlist the data matrices 119860 119861 and 119862
The open-loop system of this example is not discrete-timeSchur stable where 120588(119860) = 10012 gt 1 The two methodsNM and DSQP are considered with the parametrizationapproach where 119905
0= 0002 and 119888
119896= (08)
119896 Both methodssuccessfully converge to the same local minimum after 21and 18 iterations respectivelyThe achieved KKT and feasiblepoints are respectively
119865lowast= [21458 minus05334 minus14506 00386 10690]
119865feas = [25640 minus06294 minus16525 00469 12302]
(65)
where 119871lowastand 119871 feas are the corresponding solutions of the
discrete Lyapunov equation (17)Table 2 shows the behavior of the two methods while
converging to the local solution The objective functions andthe convergence criteria are listed columnwise in that tableThe two methods show fast local convergence rate startingfrom 119865
0= 0
Figure 1 shows the state variables for the open- andclosed-loop systems of the current example where theachieved output feedback controller matrix 119865
lowastenforces all
state variables to decay to the zero state
Example 18 This test problem is the decentralized intercon-nected system [8 DIS3] The problem has the dimensions119899 = 8 119901 = 4 and 119903 = 4 Therefore we do not list the datamatrices 119860 119861 and 119862
The open-loop system for this example is discrete-timeSchur stable where 120588(119860) = 09620 lt 1 Starting from1198650= 0 where 119871
0is the corresponding solution of (17) the
methodDSQP successfully converges to aKKTpoint (119871lowast 119865lowast)
in 14 iterations while the method NM requires 16 iterationsto converge to the same local minimum Furthermore themethod DSQP requires 17 iterations to reach a feasible pointBoth of the KKT and the feasible points are respectively
119865lowast=[[[
[
minus17344 minus05988 minus01937 00938
02451 minus01286 04894 minus05011
00037 minus00705 minus03206 00853
00606 minus02429 minus01231 minus01806
]]]
]
119865feas =[[[
[
minus105946 minus07911 minus04047 07671
55324 minus21539 35120 minus31956
02289 minus18917 minus120235 19402
04861 minus22963 minus03051 minus20438
]]]
]
(66)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Furthermore Table 3 shows the convergence behavior of themethod DSQP to the local solution (119871
lowast 119865lowast) isin D
119904
Example 19 This test problem represents a nuclear reactormodel [8 REA3]The dimensions of this example are 119899 = 12119901 = 1 and 119903 = 3 Therefore we skip listing the data matrices119860 119861 and 119862
The open-loop system for this example is not discrete-time Schur stable By applying the parametrization approach
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Journal of Applied Mathematics 9
Table 1 Convergence behavior of the method DSQP for Example16
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 31135119890 + 005 84992119890 + 007 99838119890 minus 001 02 21007119890 + 005 37773119890 + 007 99745119890 minus 001 13 14256119890 + 005 16786119890 + 007 99581119890 minus 001 1
19 15151119890 + 003 28400119890 minus 003 96853119890 minus 001 620 15151119890 + 003 76411119890 minus 005 96853119890 minus 001 621 15151119890 + 003 90844119890 minus 009 96853119890 minus 001 8
Example 16 The first test problem is a supersonic transportaircraft under Mach 27 flight condition see [8 AC16] Thediscrete-time data matrices are as follows
119860 =[[[
[
09901 00012 00000 minus00994
minus00315 10000 00989 00014
minus06269 minus00004 09773 00376
01237 00001 00016 09892
]]]
]
119861 =[[[
[
00005 00004
00004 00040
00078 00794
minus00086 minus00066
]]]
]
119862 = 1198684
(63)
Given the data matrices119860 119861 119862119876 119877 119877119890 and119881 the goal is to
calculate a local solution (119871lowast 119865lowast) isin D
119904of the NSDP problem
(10)ndash(12) using the method DSQP The corresponding 119865lowastis
considered as an approximate solution of the design problem(2)ndash(4) The open-loop system is discrete-time Schur stablebecause 120588(119860) = 09989 lt 1 Hence according to Lemma 3one can choose 119865
0= 0 and obtain 119871
0≻ 0 the corresponding
solution of the discrete Lyapunov equation (17) The twomethods NM and DSQP converge to the same local mini-mum after 25 and 21 iterations respectively Moreover wehave also tested the method DSQP for finding feasible pointsas explained at the end of Section 4 The achieved KKT andfeasible points are respectively
119865lowast= [
minus16109 01684 06795 63050
40166 minus08769 minus14994 minus29913]
119865feas = [minus1075749 88006 107506 1297845
183855 minus128539 minus139596 minus131650]
(64)
where 119871lowastand 119871 feas are the corresponding solutions of the dis-
crete Lyapunov equation (17) Table 1 shows the convergencebehavior of the method DSQP to the local solution
The method DSQP converges to a local minimum in lessnumber of iterations than the method NM for most of theconsidered test problemsThe next examples have also such abehavior
Example 17 This test problem is the discrete version of atransport aircraft model [8 AC8] The problem has the
dimensions 119899 = 9 119901 = 1 and 119903 = 5 Therefore we do notlist the data matrices 119860 119861 and 119862
The open-loop system of this example is not discrete-timeSchur stable where 120588(119860) = 10012 gt 1 The two methodsNM and DSQP are considered with the parametrizationapproach where 119905
0= 0002 and 119888
119896= (08)
119896 Both methodssuccessfully converge to the same local minimum after 21and 18 iterations respectivelyThe achieved KKT and feasiblepoints are respectively
119865lowast= [21458 minus05334 minus14506 00386 10690]
119865feas = [25640 minus06294 minus16525 00469 12302]
(65)
where 119871lowastand 119871 feas are the corresponding solutions of the
discrete Lyapunov equation (17)Table 2 shows the behavior of the two methods while
converging to the local solution The objective functions andthe convergence criteria are listed columnwise in that tableThe two methods show fast local convergence rate startingfrom 119865
0= 0
Figure 1 shows the state variables for the open- andclosed-loop systems of the current example where theachieved output feedback controller matrix 119865
lowastenforces all
state variables to decay to the zero state
Example 18 This test problem is the decentralized intercon-nected system [8 DIS3] The problem has the dimensions119899 = 8 119901 = 4 and 119903 = 4 Therefore we do not list the datamatrices 119860 119861 and 119862
The open-loop system for this example is discrete-timeSchur stable where 120588(119860) = 09620 lt 1 Starting from1198650= 0 where 119871
0is the corresponding solution of (17) the
methodDSQP successfully converges to aKKTpoint (119871lowast 119865lowast)
in 14 iterations while the method NM requires 16 iterationsto converge to the same local minimum Furthermore themethod DSQP requires 17 iterations to reach a feasible pointBoth of the KKT and the feasible points are respectively
119865lowast=[[[
[
minus17344 minus05988 minus01937 00938
02451 minus01286 04894 minus05011
00037 minus00705 minus03206 00853
00606 minus02429 minus01231 minus01806
]]]
]
119865feas =[[[
[
minus105946 minus07911 minus04047 07671
55324 minus21539 35120 minus31956
02289 minus18917 minus120235 19402
04861 minus22963 minus03051 minus20438
]]]
]
(66)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Furthermore Table 3 shows the convergence behavior of themethod DSQP to the local solution (119871
lowast 119865lowast) isin D
119904
Example 19 This test problem represents a nuclear reactormodel [8 REA3]The dimensions of this example are 119899 = 12119901 = 1 and 119903 = 3 Therefore we skip listing the data matrices119860 119861 and 119862
The open-loop system for this example is not discrete-time Schur stable By applying the parametrization approach
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
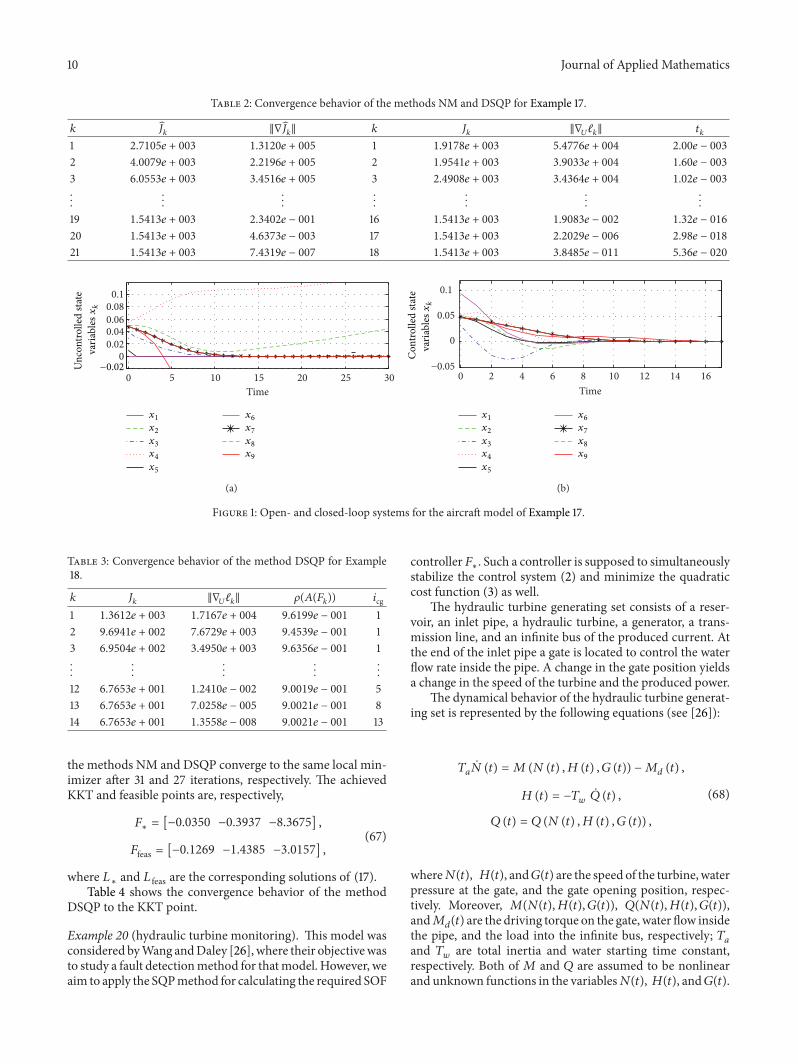
10 Journal of Applied Mathematics
Table 2 Convergence behavior of the methods NM and DSQP for Example 17
119896 119869119896
nabla119869119896 119896 119869
119896nabla119880ℓ119896 119905
119896
1 27105119890 + 003 13120119890 + 005 1 19178119890 + 003 54776119890 + 004 200119890 minus 003
2 40079119890 + 003 22196119890 + 005 2 19541119890 + 003 39033119890 + 004 160119890 minus 003
3 60553119890 + 003 34516119890 + 005 3 24908119890 + 003 34364119890 + 004 102119890 minus 003
19 15413119890 + 003 23402119890 minus 001 16 15413119890 + 003 19083119890 minus 002 132119890 minus 016
20 15413119890 + 003 46373119890 minus 003 17 15413119890 + 003 22029119890 minus 006 298119890 minus 018
21 15413119890 + 003 74319119890 minus 007 18 15413119890 + 003 38485119890 minus 011 536119890 minus 020
0 5 10 15 20 25 30
0002004006008
01
Time
minus002Unc
ontro
lled
state
varia
bles
xk
x1
x2
x3
x4
x5
x6
x7
x8
x9
(a)
01
0 2 4 6 8 10 12 14 16minus005
0
005
Time
Con
trolle
d sta
tex1
x2
x3
x4
x5
x6
x7
x8
x9
varia
bles
xk
(b)
Figure 1 Open- and closed-loop systems for the aircraft model of Example 17
Table 3 Convergence behavior of the method DSQP for Example18
119896 119869119896
nabla119880ℓ119896 120588(119860(119865
119896)) 119894cg
1 13612119890 + 003 17167119890 + 004 96199119890 minus 001 12 96941119890 + 002 76729119890 + 003 94539119890 minus 001 13 69504119890 + 002 34950119890 + 003 96356119890 minus 001 1
12 67653119890 + 001 12410119890 minus 002 90019119890 minus 001 513 67653119890 + 001 70258119890 minus 005 90021119890 minus 001 814 67653119890 + 001 13558119890 minus 008 90021119890 minus 001 13
the methods NM and DSQP converge to the same local min-imizer after 31 and 27 iterations respectively The achievedKKT and feasible points are respectively
119865lowast= [minus00350 minus03937 minus83675]
119865feas = [minus01269 minus14385 minus30157]
(67)
where 119871lowastand 119871 feas are the corresponding solutions of (17)
Table 4 shows the convergence behavior of the methodDSQP to the KKT point
Example 20 (hydraulic turbine monitoring) This model wasconsidered byWang andDaley [26] where their objectivewasto study a fault detectionmethod for thatmodel However weaim to apply the SQPmethod for calculating the required SOF
controller119865lowast Such a controller is supposed to simultaneously
stabilize the control system (2) and minimize the quadraticcost function (3) as well
The hydraulic turbine generating set consists of a reser-voir an inlet pipe a hydraulic turbine a generator a trans-mission line and an infinite bus of the produced current Atthe end of the inlet pipe a gate is located to control the waterflow rate inside the pipe A change in the gate position yieldsa change in the speed of the turbine and the produced power
The dynamical behavior of the hydraulic turbine generat-ing set is represented by the following equations (see [26])
119879119886 (119905) = 119872 (119873 (119905) 119867 (119905) 119866 (119905)) minus 119872
119889(119905)
119867 (119905) = minus119879119908 (119905)
119876 (119905) = 119876 (119873 (119905) 119867 (119905) 119866 (119905))
(68)
where119873(119905) 119867(119905) and119866(119905) are the speed of the turbine waterpressure at the gate and the gate opening position respec-tively Moreover 119872(119873(119905)119867(119905) 119866(119905)) 119876(119873(119905)119867(119905) 119866(119905))and119872
119889(119905) are the driving torque on the gate water flow inside
the pipe and the load into the infinite bus respectively 119879119886
and 119879119908are total inertia and water starting time constant
respectively Both of 119872 and 119876 are assumed to be nonlinearand unknown functions in the variables119873(119905) 119867(119905) and119866(119905)
Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Journal of Applied Mathematics 11
Table 4 Convergence behavior of the method DSQP for Example 19
119896 119869119896
nabla119880ℓ119896 120588(119860
119905119896(119865119896)) 119905
119896119894cg
0 30141119890 + 008 15819119890 + 010 99779119890 minus 001 200119890 minus 003 11 27360119890 + 008 12031119890 + 010 99819119890 minus 001 160119890 minus 003 12 27696119890 + 008 10624119890 + 010 99877119890 minus 001 102119890 minus 003 1
25 18154119890 + 004 84501119890 minus 001 99979119890 minus 001 639119890 minus 035 326 18154119890 + 004 57828119890 minus 004 99979119890 minus 001 193119890 minus 037 327 18154119890 + 004 77346119890 minus 007 99979119890 minus 001 467119890 minus 040 4
Let 119875119899(119873119899 119867119899 119866119899) be a nominated reference point By
linearizing the system (68) about119875119899one obtains the following
continuous-time linear control system (see [26] for details)
(119905) = 119860119888119909 (119905) + 119861
119888119906 (119905) + 119864
119888V (119905) (69)
where
119860119888= [
[
minus500 0 0
02500 minus01250 03570
100005 minus00250 minus22450
]
]
119861119888= [
[
50
0
minus100
]
]
119864119888= [
[
0
minus02500
minus00050
]
]
(70)
The corresponding discrete-time state space model takes thefollowing form
119909119896+1
= 119860119909119896+ 119861119906119896+ 119864V119896 119910
119896= 119862119909119896 (71)
where
119860 = 119890119860119888119879
119861 = int
119879
0
119890119860119888120591
119861119888119889120591 119864 = int
119879
0
119890119860119888120591
119864119888119889120591
(72)
By choosing the sample time period = 01 sec the follow-ing data matrices are obtained
119860 = [
[
00067 0 0
00590 09875 00331
16359 minus00022 07846
]
]
119861 = [
[
09933
minus00341
minus16315
]
]
(73)
119864 = [
[
0
minus0250
minus0005
]
]
(74)
The discrete-time system (71) is Schur stable where 120588(119860) =
09871 lt 1 Similar to the above examples we run themethods NM and DSQP on this model using the above datamatrices The two methods converge to the same stationarypoint after 12 and 11 iterations respectively where
119865lowast= [minus00083 minus00117] (75)
0 5 10 15 20 25 30
04
06
08
0
02
TimeU
ncon
trolle
d sta
teva
riabl
esxk
x1
x2
x3
(a)
0 2 4 6 8 10 12 14
040608
minus020
02
Time
x1
x2
x3
Con
trolle
d sta
teva
riabl
esxk
(b)
Figure 2 Open- and closed-loop systems for the hydraulic turbinemodel of Example 20
Figure 2 shows the state variables of the open- and closed-loop systems Although the open-loop system is Schur stablethe computed SOF controller 119865
lowastaccelerates the decay of the
state variables to the zero stateIn Table 5 we further compare the SQP method for
finding the local solution of the NSDP (10)ndash(12) versusNewtonrsquos method applied on the special formulation of theoptimization problem (5)-(6) The comparison is performedon 50 test problems from the benchmark collection [8] Inthat table we list the problem name the problem dimensionsthe stability indicators for the open- and closed-loop controlsystems and the number of iterations of the two methodsto reach the stationary points A dash ldquondashrdquo in the last twocolumns indicates that the method could not achieve theprescribed accuracy The obtained results quite show that the
12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Journal of Applied Mathematics
Table 5 Comparison between the methods NM and DSQP for finding the local solutions of the problems (5)-(6) and (10)ndash(12) respectivelytest problems are from [8]
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
AC1 5 3 3 10000 96958119890 minus 001 11 7
AC3 5 2 4 09991 95419119890 minus 001 20 19
AC4 4 1 2 12942 99501119890 minus 001 11 10
AC6 7 2 4 09992 91586119890 minus 001 19 17
AC7 9 1 2 10174 99693119890 minus 001 7 5
AC8 9 1 5 10012 96072119890 minus 001 21 18
AC15 4 2 3 09990 96497119890 minus 001 23 22
AC16 4 2 4 09989 96853119890 minus 001 25 21
AC17 4 1 2 09723 94295119890 minus 001 13 11
HE1 4 2 1 10280 99116119890 minus 001 5 4
HE2 4 2 2 09971 96999119890 minus 001 16 13
HE3 8 4 6 10088 96678119890 minus 001 9 6
REA1 4 2 2 12203 89332119890 minus 001 8 4
REA2 4 2 3 12227 89821119890 minus 001 7 4
REA3 12 1 3 10000 99979119890 minus 001 31 27
DIS1 8 4 4 09912 95066119890 minus 001 13 11
DIS2 3 2 2 11824 77117119890 minus 001 8 4
DIS3 6 4 4 09620 90021119890 minus 001 16 14
DIS4 6 4 6 11551 87595119890 minus 001 9 6
AGS 12 2 2 09786 97976119890 minus 001 7 5
TG1 10 2 2 09768 96791119890 minus 001 19 17
UWV 8 2 2 09989 30749119890 minus 001 20 19
IH 21 11 10 10000 97497119890 minus 001 5 3
EB1 10 1 1 09990 99370119890 minus 001 14 8
EB2 10 1 1 09990 99370119890 minus 001 9 8
TF1 7 2 4 1 99241119890 minus 001 mdash 8
PSM 7 2 3 09495 91393119890 minus 001 11 9
NN2 2 1 1 10000 94185119890 minus 001 3 2
NN4 4 2 3 09969 93285119890 minus 001 14 12
NN8 3 2 2 09971 95459119890 minus 001 14 13
NN11 16 3 5 09048 90783119890 minus 001 8 6
NN13 6 2 2 12147 80133119890 minus 001 7 4
NN15 3 2 2 1 99880119890 minus 001 7 6
NN16 8 4 4 10000 98135119890 minus 001 10 6
HF2D10 5 2 3 10133 92187119890 minus 001 4 3
HF2D11 5 2 3 10253 80074119890 minus 001 4 2
Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Journal of Applied Mathematics 13
Table 5 Continued
Problem Problem dimension Stability indicator No of iterations
119899 119901 119903 120588(119860) 120588(119860(119865lowast)) NM DSQP
HF2D12 5 2 4 09830 94527119890 minus 001 13 mdash
HF2D13 5 2 4 09756 80712119890 minus 001 13 12
HF2D14 5 2 4 10227 96188119890 minus 001 14 27
HF2D15 5 2 4 11689 87364119890 minus 001 8 6
HF2D17 5 2 4 10557 80215119890 minus 001 9 5
HF2D18 5 2 2 10285 99607119890 minus 001 8 6
MFP 4 3 2 09979 99567119890 minus 001 mdash 11
TMD 6 2 4 1 98667119890 minus 001 8 5
LAH 48 1 1 09742 97416119890 minus 001 3 2
DLR1 10 2 2 09995 99902119890 minus 001 9 6
DLR2 40 2 2 09995 99943119890 minus 001 6 5
DLR3 40 2 2 09995 99943119890 minus 001 7 5
HF1 130 1 2 09981 99573119890 minus 001 7 6
ISS1 270 3 3 09997 99962119890 minus 001 11 7
SQP method outperforms Newtonrsquos method with respect tonumber of iterations
6 Conclusion
In this paper an SQP method with line search is intro-duced for finding the local solution of some NSDP problemresulting from the discrete-time static output feedback designproblem One of the two unknowns of the KKT pointobtained by the numerical method is the output feedbackcontroller matrix 119865 that represents the approximate solutionof the design problem
In order to initialize the SQP method a straightforwardstrategy was considered to create a starting feasible pointwith respect to the positive definite constraints (12) Themethod DSQP outperformed Newtonrsquos method [9] appliedon a special formulation of the optimization problem Fur-thermore the obtained results quite show that the methodDSQP converges from remote starting points to a KKT pointat a fast local rate which is typical for SQP methods Feasiblepoints of the NSDP problem have been also calculated bythe SQP method Such feasible points can be utilized forexample by methods that look for the optimal solutionsFinally the considered numerical experiments show thatthe proposed algorithm is effective in practical applicationsrelated to this problem class
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper
References
[1] F Jarre ldquoAn interior-point method for non-convex semi-definite programsrdquo Optimization and Engineering vol 1 pp347ndash372 2000
[2] F Leibfritz and E M E Mostafa ldquoAn interior point constrainedtrust regionmethod for a special class of nonlinear semidefiniteprogramming problemsrdquo SIAM Journal onOptimization vol 12no 4 pp 1048ndash1074 2002
[3] MKocvara F LeibfritzM Stingl andDHenrion ldquoAnonlinearsdp algorithm for static output feedback problems in COM-Pleibrdquo in Proceedings of the 16th Triennial World Congress ofInternational Federation of Automatic Control (IFAC rsquo05) pp1055ndash1060 July 2005
[4] D Sun J Sun and L Zhang ldquoThe rate of convergence ofthe augmented Lagrangian method for nonlinear semidefiniteprogrammingrdquo Mathematical Programming vol 114 no 2 pp349ndash391 2008
[5] R Correa and H C Ramirez ldquoA global algorithm for nonlinearsemidefinite programmingrdquo SIAM Journal on Optimizationvol 15 no 1 pp 303ndash318 2004
[6] H Yamashita and H Yabe ldquoLocal and superlinear convergenceof a primal-dual interior point method for nonlinear semidef-inite programmingrdquo Mathematical Programming vol 132 no1-2 pp 1ndash30 2012
[7] R W Freund F Jarre and C H Vogelbusch ldquoNonlinearsemidefinite programming sensitivity convergence and anapplication in passive reduced-order modelingrdquo MathematicalProgramming vol 109 no 2-3 pp 581ndash611 2007
[8] F Leibfritz ldquoCOMPlib COnstraint Matrix-optimization Prob-lem library-a collection of test examples for nonlinear semi-definite programs control system design and related problemsrdquoTech Rep 2004 httpwwwcomplibde
[9] P M Makila and H T Toivonen ldquoComputational methodsfor parametric LQ problemsmdasha surveyrdquo IEEE Transactions onAutomatic Control vol 32 no 8 pp 658ndash671 1987
14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

14 Journal of Applied Mathematics
[10] T Rautert and E W Sachs ldquoComputational design of optimaloutput feedback controllersrdquo SIAM Journal on Optimizationvol 7 no 3 pp 837ndash852 1997
[11] P M Makila ldquoLinear quadratic control revisitedrdquo Automaticavol 36 no 1 pp 83ndash89 2000
[12] P Apkarian H D Tuan and J Bernussou ldquoContinuous-timeanalysis eigenstructure assignment and H
2synthesis with
enhanced linear matrix inequalities (LMI) characterizationsrdquoIEEE Transactions on Automatic Control vol 46 no 12 pp1941ndash1946 2001
[13] F Leibfritz and E M E Mostafa ldquoTrust region methods forsolving the optimal output feedback design problemrdquo Interna-tional Journal of Control vol 76 no 5 pp 501ndash519 2003
[14] E M E Mostafa ldquoA trust region method for solving the decen-tralized static output feedback design problemrdquo Journal ofApplied Mathematics amp Computing vol 18 no 1-2 pp 1ndash232005
[15] E M E Mostafa ldquoAn augmented Lagrangian SQP method forsolving some special class of nonlinear semi-definite program-ming problemsrdquoComputationalampAppliedMathematics vol 24no 3 pp 461ndash486 2005
[16] E M E Mostafa ldquoAn SQP trust region method for solving thediscrete-time linear quadratic control problemrdquo InternationalJournal of Applied Mathematics and Computer Science vol 22no 2 pp 353ndash363 2012
[17] J Nocedal and S J Wright Numerical Optimization SpringerSeries in Operations Research Springer New York NY USA1999
[18] V L Syrmos C T Abdallah P Dorato and K GrigoriadisldquoStatic output feedback-a surveyrdquo Automatica vol 33 pp 125ndash137 1997
[19] G Garcia B Pradin and F Zeng ldquoStabilization of discrete timelinear systems by static output feedbackrdquo IEEE Transactions onAutomatic Control vol 46 no 12 pp 1954ndash1958 2001
[20] J-W Lee and P P Khargonekar ldquoConstrained infinite-horizonlinear quadratic regulation of discrete-time systemsrdquo IEEETransactions on Automatic Control vol 52 no 10 pp 1951ndash19582007
[21] E M E Mostafa ldquoComputational design of optimal discrete-time output feedback controllersrdquo Journal of the OperationsResearch Society of Japan vol 51 no 1 pp 15ndash28 2008
[22] E M E Mostafa ldquoA conjugate gradient method for discrete-time output feedback control designrdquo Journal of ComputationalMathematics vol 30 no 3 pp 279ndash297 2012
[23] B Sulikowski K Galkowski E Rogers and D H OwensldquoOutput feedback control of discrete linear repetitive processesrdquoAutomatica vol 40 no 12 pp 2167ndash2173 2004
[24] ED SontagMathematical ControlTheory vol 6 SpringerNewYork NY USA 2nd edition 1998
[25] F S Kupfer Reduced SQP in Hilbert space with applicationsto optimal control [PhD dissertation] FB IV-MathematikUniversitat Trier Trier Germany 1992
[26] H Wang and S Daley ldquoA fault detection method for unknownsystems with unknown input and its application to hydraulicturbinemonitoringrdquo International Journal of Control vol 57 pp247ndash260 1993
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of