Embed Size (px)
Citation preview
![Page 1: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/1.jpg)
Research ArticleIndividual Building Rooftop and Tree Crown Segmentationfrom High-Resolution Urban Aerial Optical Images
Jichao Jiao and Zhongliang Deng
School of Electronic Engineering Beijing University of Posts and Telecommunications Beijing 100876 China
Correspondence should be addressed to Jichao Jiao jiaojichaobupteducn
Received 2 September 2015 Accepted 8 December 2015
Academic Editor Chiman Kwan
Copyright copy 2016 J Jiao and Z Deng This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
We segment buildings and trees from aerial photographs by using superpixels and we estimate the treersquos parameters by using a costfunction proposed in this paper A method based on image complexity is proposed to refine superpixels boundaries In order toclassify buildings from ground and classify trees from grass the salient feature vectors that include colors Features fromAcceleratedSegment Test (FAST) corners and Gabor edges are extracted from refined superpixels The vectors are used to train the classifierbased on Naive Bayes classifier The trained classifier is used to classify refined superpixels as object or nonobject The propertiesof a tree including its locations and radius are estimated by minimizing the cost function The shadow is used to calculate thetree height using sun angle and the time when the image was taken Our segmentation algorithm is compared with other twostate-of-the-art segmentation algorithms and the tree parameters obtained in this paper are compared to the ground truth dataExperiments show that the proposed method can segment trees and buildings appropriately yielding higher precision and betterrecall rates and the tree parameters are in good agreement with the ground truth data
1 Introduction
With the fast pace of industrialization and urbanization 3Dmodels are more and more necessary for urban planningflight simulator andmilitary training It is important to iden-tify buildings and trees in high-resolution aerial photographsfor displacement maps in real-time which is a key procedurefor building 3D models because buildings and trees notonly are significant features for city modeling but also oftenocclude other elements in 3D urban models Therefore thefirst step of displacement maps is to detect buildings andtrees from aerial photographs Automatic detection of treesand buildings is a challenging work because first of all theinput data sets of aerial photographs are huge second thefeatures of buildings and trees are various and it is hard tofind salient ones for training purposes third it is difficult toclassify building from ground and classify tree from grass indesert climate regions like Arizona State in USA
Recently many methods have been proposed for aerialimages objects detection In this section we will provide adescription of prior art of building and tree detection from
three aspects (1) buildings and trees segmentation (2) super-pixel refinement (3) salient region feature
(A) Building and Tree Segmentation Building and tree seg-mentation from aerial image is used in different applica-tions and analysis for example mapping video games 3Dmodeling environmental management and monitoring anddisaster management Huertas and Nevatia [1] used a genericmodel of shapes of structures which were rectangular or werecombined by rectangular components to detect the buildingsHowever they assumed the visible building surfaces con-sisted of smooth regions and that building sides consistedmostly of vertical structures which makes it difficult todetect complex buildings Liow and Pavlidis [2] proposed twomethods integrating region-growing and edge detection toextract buildings However some small buildings were notdetected Then Rottensteiner and Briese [3] used a hierar-chic application of robust interpolation using a skew errordistribution function to extract the building points from theLiDAR data However this method needed much time tocalculate the digital terrain model (DTM) Rottensteiner
Hindawi Publishing CorporationJournal of SensorsVolume 2016 Article ID 1795205 13 pageshttpdxdoiorg10115520161795205
2 Journal of Sensors
et al [4] proposed a hierarchic approach to extract thebuildings from the LiDAR data and multispectral images byusing a classification This method extracted large and smallbuildings However they put more emphasis on detecting allbuildings in the test data set than on reducing false alarmrate Cheng and his colleagues [5] proposed an algorithm ofintegration of LiDAR data and optical images for buildingroofs segmentation However point normal estimation needsto be used for initial segmentation whichmade the algorithmcomplicated In order to achieve roof segmentation fromaerial images El Merabet et al [6] proposed a line andregion-based watershed method based on the cooperationof edge- and region-based segmentation methods Howeverthis method is not robust to the aerial image resolutioncontrast noise and so forth
There are many methods for tree segmentation fromaerial urban images Iovan et al [7] proposed a supervisedclassification system based on Support Vector Machines(SVM) to detect trees in high density urban areas usinghigh-resolution color infrared images Unlike our proposedmethod this algorithm only uses textures to segment treesfrom buildings which reduces the segmentation accuracyAnother pixel-level classifier based on Adaboost was imple-mented to segment trees from the aerial urban images [8]However this method cannot segment the neighbor treesChen and Zakhor [9] proposed a random forest classifier forthe tree segmentation without using color information Inthis method the edges of buildings and trees were not dis-criminated because of lacking some other features In orderto accurately segment the trees Brook and Ben-Dor [10]proposed an approach based on a sequence merge includingdifferent classifiers However this classifier was a complexclassifier that was difficult to be implemented Risojevic etal [11] presented an evaluated classifier based on SVM usingonly Gabor features However because of lacking colorfulinformation the objects with smooth structures cannot becorrectly segmented Swetnam and Falk [12] proposed amethod for tree canopy segmentation and estimating treersquosparameters by using LiDAR data In order to calculate theforest structural parameters Huang et al [13] proposed amethod for calculating the tree height and crown widthby using high-resolution aerial imagery with a low densityLiDAR system
(B) FAST Superpixel Refinement In order to overcome theundersegmentation the number and boundaries of super-pixels should be appropriately determined A superpixel is apatch whose boundary matches the edge of an object Super-pixels represent a restricted form of region segmentationbalancing the conflicting goals of reducing image complexitythrough pixel grouping while avoiding undersegmentationThey have been adopted primarily by those attempting tosegment classify or label images from labeled training dataSuperpixels are segments in an imagewhich can serve as basicunits in the further image processing Their purpose is toreduce the redundancy in the image and increase efficiencyfrom the point of view of the next processing task Manymethods for the computation of superpixels were alreadypresented
Levinshtein et al [14] presented a method to producesmooth segment boundaries Turbopixels algorithm was ageometric-flow based algorithm for computing a dense over-segmentation of an image often referred to as superpixelsIt produced segments that on one hand respect local imageboundaries while on the other hand limiting undersegmen-tation through a compactness constraint It was very fast withcomplexity that was approximately linear in image size andcan be applied tomegapixel sized imageswith high superpixeldensities in a matter of minutes However it produced afixed number of superpixels Engel et al [15] used the medialfeatures to detect the undersegmentation region and Sobeloperator was used to detect the edges of undersegmenta-tion regions However the computational burden of thismethod was high because of implementing iterations whichincreased the run-time Kluckner and Bischof [16] proposedan automatic building extraction method based on superpix-els which is similar to our method However they applieda conditional Markov random field (CRF) to refinement onsuperpixels twice which was a computationally expensiveprocess Therefore we proposed a fast and simple methodbased on image complexity to determine the number ofsuperpixels and refine boundaries of superpixels
Therefore we can find that a drawback of most of thesemethods is their high computational complexity and hencehigh computational time consumption Second a sophisti-cated method for marker image calculation which respectsboth the remaining natural edges in the image and the reg-ularity of marker placement in still regions of the image stillhas to be developed
(C) Salient Region Feature Salient region which was intro-duced by Itti et al [17] attracts much more attention byhuman brain and visual system than other regions in theimage It is inspired by the Human Vision System (HVS) andtherefore the features extracted from salient regions areinvariant to viewpoint change insensitivity to image per-turbations and repeatability under intraclass variation [18]These features are key properties for image classificationTherefore salient region is introduced for the image classi-fication Hahn et al [19] presented a representation for 3Dsalient region features and these features were used to beimplemented for medical image registration The authorsused a region-growing based approach for extracting 3Dsalient region features In order to extract cartographic fea-tures from aerial and spatial images Kicherer et al [20] pro-posed an interactive method based on image texture andgray-level information for image region segmentation Bi etal [21] proposed a method for saliency tiles detection fromthe entire image using low-level features However becauseof selecting tiles whose edges were regular some edges ofan object were missed and much computation was neededTherefore we extract the salient features from superpixelsand these features are used for the aerial image classification
(D) Research Objective To automatically generate a realistic3D urban model just depending on a single 2D large high-resolution urban image we should segment and detect all theobjects in the 2D image such as trees buildings and streets
Journal of Sensors 3
Figure 1 The overview area of Phoenix USA
However in this work we limit our focus to buildings andtrees Our aim is to produce a label for each pixel in an aerialphotograph indicating whether building or tree is present atits location We are given a high-resolution aerial or satellitephotograph from a nadir viewpoint that includes visible color(119877119866119861 or 119867119878119881) which is an important feature for buildingand tree segmentation We do not consider additional rasterdata that may be available such as LiDAR data infraredhyperspectral data stereo data or digital surface modelsbecause they can be more difficult to obtain Therefore weclaim the following specific contributions
(1) Proposing a method to automatically estimate thesuperpixels number for an aerial photo based onmea-surement of image complexity and detect boundariesof the undersegmentation region The new methodmakes our approach robust against missing or erro-neous metadata about image resolution
(2) Proposing a salient feature vector for training theclassifier which is simple and efficient and easy to beimplemented
(3) Proposing an approach for estimating the locationand radius of a tree crown and the tree height withoutadditional information which is simple and efficientand easy to be implemented
2 Materials
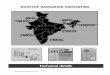
21 StudyArea Thestudy area is located at Phoenix ArizonaUnited States and its location is (33∘271015840N 112∘41015840W) whichis shown in Figure 1 The area of the study region isabout 2917264 km2 Arizona has an abundance of mountainsand plateaus in addition to its desert climate Despite thestatersquos aridity 27 of Arizona is forest The largest stand ofPonderosa pine trees in the world is contained in ArizonaTherefore the geography of Arizona makes it more difficultto segment the buildings and trees from images than fromother areas
22 Aerial Imagery The test images are from urban or sub-urban regions of Arizona USA These aerial images were
Table 1 Main EXIF information of experimental images
Tag ValueManufacturer LeicaModel ADS40DateandTime 20081211 34532ExposureTime 1659 secondsComponentsConfiguration 401MaxApertureValue 20FocalLength 201mmColorSpace sRGBPixelXDimension 6250PixelYDimension 6250
Figure 2 The original image with its zoom-in area
collected at August 2008 using the ADS40 airborne digitalsensor The height taken in the images is 600 meters Thissensor incorporates a line-array of charge-coupled devices(CCDs) and is capable of acquiring visible to near-infraredstereo data at ground resolutions of 05mpixel The detailof this sensor can be found in [22] The resolution of eachaerial image shown in Figure 2 is 8540 times 8540 in thispaper The main EXIF information of experimental imagesis shown in Table 1 Moreover in order to train the classifier50 images which are labeled trees building and others areused and the examples of the original labeled images areshown in Figure 3 whose resolution is 2048 times 1642 pixelsFurthermore 500 images are used to evaluate the proposedalgorithm
3 Proposed Algorithm
In this paper we propose a building and tree segmentationmethod using superpixels from a single large high-resolutionurban image The procedure of this algorithm is shown inFigure 4
31 Presegmentation Based on Refined Simple Superpixel Inthis paper an improved method is proposed to presegmentthe large scale image with a high accuracy This methodis based on Turbopixels whose number of superpixels wasgiven by users However different from the Turbopixels our
4 Journal of Sensors
(a) (b) (c)
Figure 3 Three examples of the original labeled images for classifier training
Start
End
Coarse positioningReceive three or moresignals from mobile
basis stationsLocation estimationbased on TC-OFDM
Obtain the coarsepositioning region
Feature extraction from superpixels
Calculate the colorfulinformation FAST corner extraction extraction
Gabor textures
Building and tree segmentation
Superpixel region combinationCalculate image meansand variation
Building and tree classification
Superpixel region combinationCalculate image meansand variation
Tree parameters calculation
Update the initializationparameter
Calculate the norm value
valueCalculate the gradient
Calculate the newgradient value
Calculate the newnorm value
Calculate the treeparameters
Yes
No
Stop calculating costfunction
Figure 4 The flow chart of our algorithm
method used two formulas to overcome the undersegmenta-tion caused by Turbopixels
In order to use superpixels [14 23] to presegment imagesto reduce computation while preserving exact pixel bound-aries different types of images should need different numbersof superpixels Therefore it is required to automatically cal-culate the number of superpixels according to the processedimages Moreover it is necessary to overcome the under-segmentation by refining results given by TurbopixelsThere-fore we use 119873superpixel that is defined in Section 311 to cal-culate the number of superpixels automatically according tothe image complexity and 119877edge is used to refine the pre-segmentationThis superpixel is called Refined Simple Super-pixel
311 Simple Superpixel Segmentation The aim of superpixelsis to reduce the problem by replacing pixels with regularlyspaced similarly sized image patches whose boundaries lieon edges between objects in the image so a pixel-exactobject segmentation can be accomplished by classifyingsuperpixel patches rather than individual pixels However theboundaries of the superpixels will not match with the edgesof the objects as well if the number of superpixels generatedis too small and the computation will be expensive when thenumber is too large
In this paper we use the image complexity to calculatethe number of superpixels Image complexity is defined as ameasure of the inherent difficulty of finding a true target in agiven image The image complexity metric is determined by
Journal of Sensors 5
the gray-level feature or the edge-level feature [24] Accordingto Rigau et al [25] image complexity depended on theentropy of the image intensity histogram Therefore we usethe entropy to measure the image complexity The followingformula is used to calculate 120598
120598 = minussum119901119894log2
119901119894 (1)
where 119901119894is the probability value of 119894th gray This metric was
originally developed for automatic target recognition How-ever according to lots of experiments we suggest anothernovel use of this metric to choose the number of superpixelsusing the following formula
119873superpixel =120598 times119872
120601 times 100 (2)
where 119872 is the image size and 120601 is a weighted valueAccording to (2) we can find that the number of superpixelsis dependent on the image complexity and the image sizeThebigger 120598 is the more useful information is included in theaerial image Moreover the bigger119872 is the more objects arecontained in the aerial image Therefore 119873superpixel must bebigger whichmeans thatmore superpixels whose boundarieslie on edges between objects in the image are needed tosegment the images However in order to obtain a balancebetween the segmentation accuracy and computation apenalty weight 120601 is introduced in (2)
Testing different types of images which were collectedby our lab we suggest that the internal of 120601 is 6sim13 andin our experiment 120601 is 81 In order to balance under- andoversegmentation several parameters were introduced in (2)According to our research oversegmentation or underseg-mentation is caused by inappropriate numbers of superpixelsFurthermoremore details are included in the complex imageTherefore the entropy 120598 in (2) was introduced to calculatethe image complexity Besides a larger image includes moredetails than smaller one which means that more superpixelsare required for image segmentation Therefore the imagesize 119872 was introduced in (2) Finally the parameter 120601 wasintroduced to suppress the oversegmentation As shown inFigure 2 we can find that the trees buildings and otherobjects are covered by different superpixel patches eventhe trees are adjacent which makes it easy to segmentbuildings and trees From Figure 2 we can also find thatmost of the superpixels cover the pixels which belonged to thesame objects However some boundaries of the superpixelsare missed Therefore 119877edge is implemented to detect thesemissing boundaries in Section 312
312 Refined Superpixel In this paper we use a methodbased on Canny detector to overcome the undersegmenta-tion Canny [26] suggested that in an image edges wereusually defined as sets of points with a strong gradientmagnitude An edge can be of almost arbitrary shape andmay include junctions Therefore if the variance of pixels inthe same superpixel is bigger than the threshold the Cannydetector should be used to refine this superpixel Then thenew boundary of the superpixel could be found otherwisethis superpixel does not need to be refined
In this paper we propose a function 119877edge to determinewhich superpixels need to be refined The function is shownas follows
120590119894gt thr Detection
120590119894le thr No Detection
(3)
where 120590119894is the standard deviation of the 119894th superpixel and
thr is the threshold which is obtained by the experiment Inthis paper we suggest that thr is the threshold whose intervalis [9 19] that is calculated based on [27]
Simply defining thr to be the three-dimensional feature incolor space will cause inconsistencies in clustering behaviorfor different superpixel sizes This produces compact super-pixels that adhere well to image boundaries For smallersuperpixels the converse is true
32 Salient Features Extraction from Refined Superpixels Asuperpixel-based classifier is proposed for segmenting build-ings and trees from a presegmentation image In order totrain the classifier we assign building tree others label toeach superpixel to create the training data and then a salientfeature vector is derived from an entire superpixel In thispaper we extract the color feature corners and texturefeature for training the classifier
321 Color Features In our method 119877119866119861 and 119867119878119881 (huesaturation and value) are extracted to be as color featuresTheinput 119877119866119861 indices fill a color-cube which the 119867119878119881 hexconewas designed to perfectly fit [28] 119877119866119861 is a basic color spaceand it can be transformed to any color space including119867119878119881119884119880119881 At the same time 119867119878119881 is a more reasonable colorspace and it has a relationship with theHumanVision System(HVS) Therefore they were both important for training aclassifierThe following features calculated based on119877119866119861 and119867119878119881 are extracted from each superpixel
119877mean 119866mean 119861mean 119867mean 119878mean and 119881mean themeans of each channel of 119877119866119861 and119867119878119881119877std 119866std 119861std 119867std 119878std and 119881std the standarddeviation of each channel of 119877119866119861 and119867119878119881119877max 119866max 119861max 119867max 119878max and 119881max the value ofthe pixel with the greatest intensity in the superpixel119877min 119866min 119861min 119867min 119878min and 119881min the value of apixel with the lowest intensity in the superpixel
322 Robust FAST Corners Extraction Corner refers to asmall point of interest with variation in two dimensionsThere are many corner detectors which can be classified intotwo categories (1) Corner detector based on edges an edgein an image corresponds to the boundary between two areasand this boundary changes direction at corners Many earlyalgorithms detected corners based on the intensity changes(2) Corner detector based on chained edge lots of methodshave been developed which involved detecting and chainingedges with a view to analyzing the properties of the edgeRosten et al proposed a high-speed corner detectionmethodbased on FAST (Feature from Accelerated Segment Test) and
6 Journal of Sensors
machine learning [29] which is shownby (4)However FASTcorner is not robust because the threshold in (4) is a constantTherefore a novel function which is used to calculate thethreshold is proposed in this paper which is shown by (5)
119878119897
=
119889 119868119897le 119868119888119901minus 119879FAST-corner (darker)
119904 119868119888119901minus 119879FAST-corner le 119868119897 le 119868119888119901 + 119879FAST-corner (similar)
119897 119868119897ge 119868119888119901minus 119879FAST-corner (lighter)
(4)
where 119868119897is the gray values of candidate corners in a superpixel
119868119888119901is the gray values of neighbors around 119868
119897 and119879FAST-corner is
the FAST corner number which is calculated by the followingequation
119879FAST-corner =1198912
(119909119894 119910119894)
(1 (119872 times 119873))sum119872times119873
119894=0
119891 (119909119894 119910119894)
+ 120590 (5)
where120590 is the variance of an aerial image119891(119909 119910) and119891(119909119894 119910119894)
is the value of the 119894th pixel in the image 119891(119909 119910) According to(4) we can find that the bigger120590 is themore FAST corners areextracted from the superpixels because more salient cornersare in an image whose variance is bigger
323 Gabor Textures In our method we use the Gabor filterto extract structure features of buildings and trees Structureis an important feature to segment buildings from street andground and it is also useful to segment trees from grassFurthermore frequency and orientation representations ofGabor filters are similar to those of the Human VisualSystem (HVS) and they have been found to be particularlyappropriate for texture representation and discriminationAmong various approaches for extracting texture featuresGabor filter has emerged as one of the most popular ones[30] A Gabor descriptor of an image is computed by passingthe image through a filter bank of Gabor filter In the spatialdomain a 2D Gabor filter is a Gaussian kernel functionmodulated by a sinusoidal plane wave with a complexsinusoid [31] The function is shown as follows
119892 (119909 119910)
= (1
2120587120590119909120590119910
) exp[minus12(1199092
1205902119909
+1199102
1205902119910
) + 2120587119895Ω119909]
(6)
where Ω is the frequency of the Gabor function and 120590119909and
120590119910determine its bandwidthFrom the zoom-in region of Figure 2 we can find that
(1) buildings have similar color with the ground and streetsand (2) trees and grass have similar color These two char-acteristics make it difficult to segment buildings and treesfrom aerial images However the textures of buildings andtrees are muchmore obvious than ground and grass Besidesin order to balance the conflicting goals of reducing compu-tation while obtaining a satisfying accuracy the number offrequencies 120596 (120596
1= radic21205872 120596
2= radic21205873 120596
3= radic21205874 120596
4=
radic21205875 and 1205965= radic21205876) is 5 and number of orientations 120579
(1205791= 0 120579
2= 1205878 120579
3= 1205874 120579
4= 31205878 120579
5= 1205872 120579
6= 51205878
1205797= 31205874 and 120579
8= 71205878) is 8
Through concatenating the above features based on SVMa salient feature vector is generated for each superpixel Thenwe use this feature vector to train a classifier for building andtree segmentation Finally Naive Bayes classifier is chosen tobe used for tree and building classification in our algorithmbecause it is efficient and easy to be implemented [32]
33 Proposing a Cost Function for Tree Parameters EstimationAfter segmentation a tree location (119909
119879 119910119879) a tree radius
119903119879 and a tree height ℎ
119879are estimated by a cost function
integrating shadows
331 The Proposed Cost Function The tree model matchingis applied to 3 channels 119884 119880 and 119881 of the image 119868(119909 119910)The main advantage of the 119884119880119881model is that the luminanceand the color information are independent Therefore theluminance component can be processed without affecting thecolor contents [33] In order to match trees in 119868(119909 119910) withthe tree model119872(119909 119910) we propose a cost function which isshown as follows
cost = arg min (1199080+ 119908119884119865119884+ 119908119880119865119880+ 119908119881119865119881+ 119908119878119865119878) (7)
where 1199080 119908119884 119908119880 119908119881 and 119908
119878are the weights to control
the convergence speed of the cost function 119865119884 119865119880 and 119865
119881
are used to calculate the root of the square error (RSE) of119884 119880 and 119881 channel between 119868(119909 119910) and119872(119909 119910) within thetreersquos canopy and 119865
119878is used to calculate the RSE of shadows
in 119868(119909 119910) and119872(119909 119910) which is a circle These functions areshown as follows
119865119884(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119884(119909 119910) minus119872
119884(119909 119910)]
2
119865119880(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119880(119909 119910) minus119872
119880(119909 119910)]
2
119865119881(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119881(119909 119910) minus119872
119881(119909 119910)]
2
119865119878(119868119872) = 120596radic
sum
119909119910isin119862119878(119872)
[119868119878(119909 119910) minus119872
119878(119909 119910)]
2
(8)
where 120574 = 1119875 119875 is a weight and 119875 isin [0 1]
119862 (119872) = 119909 119910 | (119909 minus 1199090)2
+ (119910 minus 1199100)2
le 1199032
0
(9)
119862(119872) is supposed to be circular in our algorithm (1199090 1199100)
is the initializing center of the model 1199030is the initializing
radius and 120596 = 1119876 119876 is a weight and 119876 isin [0 1]
119862119878(119872) = 119909 119910 | (119909 minus 119909
119878)2
+ (119910 minus 119910119878)2
le 1199032
0
(10)
119862119878(119872) is also supposed to be a circle and its radius is
the same with the tree model (119909119878 119910119878) is dependent on the
centroid of the tree which is detected In Section 1 we showedthat there was a relationship between tree and its shadow
Journal of Sensors 7
Vertical
Horizontal
S
W
E
N Ground Tree shadow
h
Elevati
on
Azimuth (120572)
Figure 5 The relationship between tree and its shadow
which is shown in Figure 5 and this relationship can becalculated by using the following functions
119909119878= 1199090minus cosminus1120572 cotminus1120573ℎ
0
119910119878= 1199100minus sinminus1120572 cotminus1120573ℎ
0
(11)
where 120572 is the sun azimuth angle 120573 is the sun elevation angleand they could be calculated using the time when the imagewas taken ℎ
0is the tree height (119909
0 1199100) is the center of the
tree crown and (119909119878 119910119878) is the center of the shadow Here we
estimate the tree height ℎ using (11) and the cost function It isnoted that all these parameters are initialization parametersand the unit of the tree parameters is pixel because wecalculate them without additional information
332 The Outline of Calculating Treersquos Parameters In orderto calculate the treersquos parameter the gradient descent methodis employed to achieve iterations The convergence speed isrobust This procedure is shown in the following steps
Step 1 Calculate the gradient value 1198920by the initialization
parameter set int0= (119909
0 1199100) 1199030 ℎ0 where (119909
0 1199100) is the
centroid of a superpixel 1199030= 2 times 119909
0 and ℎ
0= 0
Step 2 Calculate the normvalue of1198920which can be expressed
as 1198921198990 where 119892
0= 5
Step 3 Update the int0using the formula int
1= int
0minus
oldspeed times 1198920
Step 4 Calculate the new gradient value 1198921using int
1
Step 5 Calculate the normvalue of1198921which can be expressed
as 1198921198991
Step 6 Calculate the ratio of 1198920and 1198921 rate119892can be obtained
Step 7 If rate119892gt 119879 newspeed = (rate
119892119871) times oldspeed else
newspeed = oldspeed where 119879 is a threshold 119871 is a constantand 119871 gt 1 and in our experiment 119871 = 100 In ourmethod theinitialization centroid (119909
0 1199100) is the centroid of a superpixel
that belonged to a tree The number of iterations is 600
This procedure is finished until getting the minimumvalue of tree parameters (119909lowast 119910lowast 119903lowast ℎlowast)
Our method was implemented using Microsoft VisualStudio 2010 and Matlab 2010a and this method was codedby integrating C and Matlab The proposed algorithm wastested on many large high-resolution urban images takenfrom Phoenix Arizona USA
4 Results
In our experiment the method is implemented by twosteps (1) the first step is presegmentation and the result iscompared with the result which is got by Turbopixel andEntropy Rate Superpixel (ERS) (2) the second is to segmentbuildings and trees and the segmentation result is comparedto the result got by using Turbopixel and ERS [34] (3) thetreersquos parameters estimation result is evaluated by the rootmean square error (RMSE)
41 Presegmentation Result Figure 2 is an original imagewhich includes trees grass buildings and other objects Thezoom-in area of Figure 2 shows that the tree color is similar tograss color the textures of trees are coarse and salient whilethe textures of grass are smooth Moreover the shapes of build-ings and trees are different Figure 6 shows the presegmenta-tion result By comparing Figures 6(a) 6(b) and 6(c) we canfind that the superpixel in Figure 6(a) was refined by ourmethod It is noted that the number of superpixels is 8200before the aerial images are presegmented by using Turbo-pixels
Figure 6(a) shows the result which is obtained by (3)Theboundaries are marked by red and the boundaries which aregot by (3) are marked by green
42 Segmentation Result Figure 7 shows four segmentationresults the first one is based on our method the second oneis based on the Turbopixels the third one is obtained by usingERS and the last one is ground truth segmentation result Bysubjectively comparing these three results we found that thesegmentation result got by our method is the best Because oftraining the features from the superpixels computation of ourmethod is less than that of the method used by ERS For thesuperpixel-level segmentation the computational complexityis 119874(120598 times 1198722
10
) However the computational complexity ofpixel-level is 119874(119872) 120598 is the image complexity and119872 is thepixel number Therefore the running time of our method isconsiderable which is very important in large scale urbanaerial image processing The average running time of ourmethod is 45 less than the average running time of ERS
Furthermore two standard metrics which were under-segmentation error [35] and boundary recall [36] were usedfor evaluating the quality of superpixels Undersegmentationerror (UE)measures fraction of pixel leak across ground truthboundaries which is shown by (12) The comparison resultsof UE were shown in Figure 8(a)
UET (119878) =sum119894
sum119896119878119896cap119879119894 =⊘
1003816100381610038161003816119878119896 minus 1198791198941003816100381610038161003816
sum119894
10038161003816100381610038161198661198941003816100381610038161003816
(12)
where T = 1198661 1198662 119866
119899 represent ground truth seg-
mentation and 119866119894denotes the segment size and 119878
119896is the 119896th
8 Journal of Sensors
(a) The result based on ourmethod
(b) The result based on Turbo-pixels
(c) The result based on ERS
Figure 6 The comparative presegmentation result
Original images Ground truthERSTurbopixelsProposed method
Figure 7 The comparative segmentation result
superpixel Boundary recall (BR) measures the percentage ofthe natural boundaries recovered by the superpixel bound-aries which is represented by (13) The comparison results ofBR were shown in Figure 8(b)
BRT (119878) =sum119901isin120575T nabla (min
119902isin120575119878
1003817100381710038171003817119901 minus 1199021003817100381710038171003817 lt 120598)
|120575119879| (13)
where 120575T and 120575119878 denote the union sets of ground truthboundaries and superpixel boundaries respectivelyThe indi-cator function nabla checks if the nearest pixel is within distanceIn our experiments we set nabla = 2 These performance metricsare plotted against the number of superpixels in an image
According to Figure 8 we can find that the proposedalgorithm in this paper performs significantly better than
Journal of Sensors 9
ProposedERSTurbopixels
4000 5000 6000 7000 8000 90003000
Number of superpixels per image
005
01
015
02
025
03
035
04
Und
erse
gmen
tatio
n er
ror
(a)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
0
005
01
015
02
025
03
035
04
045
Und
erse
gmen
tatio
n er
ror
(b)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 90002000
Number of superpixels per image
06
065
07
075
08
085
09
095
1
Boun
dary
reca
ll
(c)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
05
06
07
08
09
1
11
12
Boun
dary
reca
ll
(d)
Figure 8 The comparison results of UE and BR (a) Undersegmentation error curves (b) undersegmentation error bar (c) boundary recallcurves (d) boundary recall error bar
the state of the art in all the metrics when the number ofsuperpixels is calculated by the proposed function
43 Building and Tree Classification Result To justify the useof Naive Bayes classifiers which is trained by the proposedalgorithm in our approach we tried the popular intersectionkernel and Chi-square kernel on our feature vector includingcolor FAST corner and Gabor feature for comparisonFigure 9 shows the building and tree classification results withzoom-in regions
44 Treersquos Parameters Estimation Result In our method wecalculated the tree parameters one by one Each tree withshadow was extracted from every segmentation image suchas Figure 7 and then this tree is matched with treemodel thatis presented in this paper The estimation result is shown inthe panel of the GUI when the tree is marked by using redcircular which is shown in Figure 10 After calculating theparameters all of the trees are covered by a round model
RMSE is introduced to evaluate the estimation results and thefunction is shown as follows
RMSE = radic 1
119871
119871
sum
119894=1
(
1003816100381610038161003816119901119894 minus 119901true1003816100381610038161003816
119901true)
2
(14)
where 119871 is the number of trees 119901119894is the estimated parameter
and 119901true is the ground truth of the parameters which aremanually measured It is noted that 119901
119894and 119901true are used to
describe the same tree in the image The RMSE of 119909119879 119910119879 119903119879
and ℎ119879is 1142 pixels 1381 pixels 1993 pixels and 5992 pix-
els respectively At the same time wemanually measured theparameters for 270 trees which are chosen from Figure 9(a)The height of the tree cannot be measured directly becausethe image is 2D However we can measure the parameters ofthe treersquos shadow by human so the height can be calculatedby (11) Therefore the treersquos height calculated by (11) couldbe considered as ground truth Then these ground truth
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 2: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/2.jpg)
2 Journal of Sensors
et al [4] proposed a hierarchic approach to extract thebuildings from the LiDAR data and multispectral images byusing a classification This method extracted large and smallbuildings However they put more emphasis on detecting allbuildings in the test data set than on reducing false alarmrate Cheng and his colleagues [5] proposed an algorithm ofintegration of LiDAR data and optical images for buildingroofs segmentation However point normal estimation needsto be used for initial segmentation whichmade the algorithmcomplicated In order to achieve roof segmentation fromaerial images El Merabet et al [6] proposed a line andregion-based watershed method based on the cooperationof edge- and region-based segmentation methods Howeverthis method is not robust to the aerial image resolutioncontrast noise and so forth
There are many methods for tree segmentation fromaerial urban images Iovan et al [7] proposed a supervisedclassification system based on Support Vector Machines(SVM) to detect trees in high density urban areas usinghigh-resolution color infrared images Unlike our proposedmethod this algorithm only uses textures to segment treesfrom buildings which reduces the segmentation accuracyAnother pixel-level classifier based on Adaboost was imple-mented to segment trees from the aerial urban images [8]However this method cannot segment the neighbor treesChen and Zakhor [9] proposed a random forest classifier forthe tree segmentation without using color information Inthis method the edges of buildings and trees were not dis-criminated because of lacking some other features In orderto accurately segment the trees Brook and Ben-Dor [10]proposed an approach based on a sequence merge includingdifferent classifiers However this classifier was a complexclassifier that was difficult to be implemented Risojevic etal [11] presented an evaluated classifier based on SVM usingonly Gabor features However because of lacking colorfulinformation the objects with smooth structures cannot becorrectly segmented Swetnam and Falk [12] proposed amethod for tree canopy segmentation and estimating treersquosparameters by using LiDAR data In order to calculate theforest structural parameters Huang et al [13] proposed amethod for calculating the tree height and crown widthby using high-resolution aerial imagery with a low densityLiDAR system
(B) FAST Superpixel Refinement In order to overcome theundersegmentation the number and boundaries of super-pixels should be appropriately determined A superpixel is apatch whose boundary matches the edge of an object Super-pixels represent a restricted form of region segmentationbalancing the conflicting goals of reducing image complexitythrough pixel grouping while avoiding undersegmentationThey have been adopted primarily by those attempting tosegment classify or label images from labeled training dataSuperpixels are segments in an imagewhich can serve as basicunits in the further image processing Their purpose is toreduce the redundancy in the image and increase efficiencyfrom the point of view of the next processing task Manymethods for the computation of superpixels were alreadypresented
Levinshtein et al [14] presented a method to producesmooth segment boundaries Turbopixels algorithm was ageometric-flow based algorithm for computing a dense over-segmentation of an image often referred to as superpixelsIt produced segments that on one hand respect local imageboundaries while on the other hand limiting undersegmen-tation through a compactness constraint It was very fast withcomplexity that was approximately linear in image size andcan be applied tomegapixel sized imageswith high superpixeldensities in a matter of minutes However it produced afixed number of superpixels Engel et al [15] used the medialfeatures to detect the undersegmentation region and Sobeloperator was used to detect the edges of undersegmenta-tion regions However the computational burden of thismethod was high because of implementing iterations whichincreased the run-time Kluckner and Bischof [16] proposedan automatic building extraction method based on superpix-els which is similar to our method However they applieda conditional Markov random field (CRF) to refinement onsuperpixels twice which was a computationally expensiveprocess Therefore we proposed a fast and simple methodbased on image complexity to determine the number ofsuperpixels and refine boundaries of superpixels
Therefore we can find that a drawback of most of thesemethods is their high computational complexity and hencehigh computational time consumption Second a sophisti-cated method for marker image calculation which respectsboth the remaining natural edges in the image and the reg-ularity of marker placement in still regions of the image stillhas to be developed
(C) Salient Region Feature Salient region which was intro-duced by Itti et al [17] attracts much more attention byhuman brain and visual system than other regions in theimage It is inspired by the Human Vision System (HVS) andtherefore the features extracted from salient regions areinvariant to viewpoint change insensitivity to image per-turbations and repeatability under intraclass variation [18]These features are key properties for image classificationTherefore salient region is introduced for the image classi-fication Hahn et al [19] presented a representation for 3Dsalient region features and these features were used to beimplemented for medical image registration The authorsused a region-growing based approach for extracting 3Dsalient region features In order to extract cartographic fea-tures from aerial and spatial images Kicherer et al [20] pro-posed an interactive method based on image texture andgray-level information for image region segmentation Bi etal [21] proposed a method for saliency tiles detection fromthe entire image using low-level features However becauseof selecting tiles whose edges were regular some edges ofan object were missed and much computation was neededTherefore we extract the salient features from superpixelsand these features are used for the aerial image classification
(D) Research Objective To automatically generate a realistic3D urban model just depending on a single 2D large high-resolution urban image we should segment and detect all theobjects in the 2D image such as trees buildings and streets
Journal of Sensors 3
Figure 1 The overview area of Phoenix USA
However in this work we limit our focus to buildings andtrees Our aim is to produce a label for each pixel in an aerialphotograph indicating whether building or tree is present atits location We are given a high-resolution aerial or satellitephotograph from a nadir viewpoint that includes visible color(119877119866119861 or 119867119878119881) which is an important feature for buildingand tree segmentation We do not consider additional rasterdata that may be available such as LiDAR data infraredhyperspectral data stereo data or digital surface modelsbecause they can be more difficult to obtain Therefore weclaim the following specific contributions
(1) Proposing a method to automatically estimate thesuperpixels number for an aerial photo based onmea-surement of image complexity and detect boundariesof the undersegmentation region The new methodmakes our approach robust against missing or erro-neous metadata about image resolution
(2) Proposing a salient feature vector for training theclassifier which is simple and efficient and easy to beimplemented
(3) Proposing an approach for estimating the locationand radius of a tree crown and the tree height withoutadditional information which is simple and efficientand easy to be implemented
2 Materials
21 StudyArea Thestudy area is located at Phoenix ArizonaUnited States and its location is (33∘271015840N 112∘41015840W) whichis shown in Figure 1 The area of the study region isabout 2917264 km2 Arizona has an abundance of mountainsand plateaus in addition to its desert climate Despite thestatersquos aridity 27 of Arizona is forest The largest stand ofPonderosa pine trees in the world is contained in ArizonaTherefore the geography of Arizona makes it more difficultto segment the buildings and trees from images than fromother areas
22 Aerial Imagery The test images are from urban or sub-urban regions of Arizona USA These aerial images were
Table 1 Main EXIF information of experimental images
Tag ValueManufacturer LeicaModel ADS40DateandTime 20081211 34532ExposureTime 1659 secondsComponentsConfiguration 401MaxApertureValue 20FocalLength 201mmColorSpace sRGBPixelXDimension 6250PixelYDimension 6250
Figure 2 The original image with its zoom-in area
collected at August 2008 using the ADS40 airborne digitalsensor The height taken in the images is 600 meters Thissensor incorporates a line-array of charge-coupled devices(CCDs) and is capable of acquiring visible to near-infraredstereo data at ground resolutions of 05mpixel The detailof this sensor can be found in [22] The resolution of eachaerial image shown in Figure 2 is 8540 times 8540 in thispaper The main EXIF information of experimental imagesis shown in Table 1 Moreover in order to train the classifier50 images which are labeled trees building and others areused and the examples of the original labeled images areshown in Figure 3 whose resolution is 2048 times 1642 pixelsFurthermore 500 images are used to evaluate the proposedalgorithm
3 Proposed Algorithm
In this paper we propose a building and tree segmentationmethod using superpixels from a single large high-resolutionurban image The procedure of this algorithm is shown inFigure 4
31 Presegmentation Based on Refined Simple Superpixel Inthis paper an improved method is proposed to presegmentthe large scale image with a high accuracy This methodis based on Turbopixels whose number of superpixels wasgiven by users However different from the Turbopixels our
4 Journal of Sensors
(a) (b) (c)
Figure 3 Three examples of the original labeled images for classifier training
Start
End
Coarse positioningReceive three or moresignals from mobile
basis stationsLocation estimationbased on TC-OFDM
Obtain the coarsepositioning region
Feature extraction from superpixels
Calculate the colorfulinformation FAST corner extraction extraction
Gabor textures
Building and tree segmentation
Superpixel region combinationCalculate image meansand variation
Building and tree classification
Superpixel region combinationCalculate image meansand variation
Tree parameters calculation
Update the initializationparameter
Calculate the norm value
valueCalculate the gradient
Calculate the newgradient value
Calculate the newnorm value
Calculate the treeparameters
Yes
No
Stop calculating costfunction
Figure 4 The flow chart of our algorithm
method used two formulas to overcome the undersegmenta-tion caused by Turbopixels
In order to use superpixels [14 23] to presegment imagesto reduce computation while preserving exact pixel bound-aries different types of images should need different numbersof superpixels Therefore it is required to automatically cal-culate the number of superpixels according to the processedimages Moreover it is necessary to overcome the under-segmentation by refining results given by TurbopixelsThere-fore we use 119873superpixel that is defined in Section 311 to cal-culate the number of superpixels automatically according tothe image complexity and 119877edge is used to refine the pre-segmentationThis superpixel is called Refined Simple Super-pixel
311 Simple Superpixel Segmentation The aim of superpixelsis to reduce the problem by replacing pixels with regularlyspaced similarly sized image patches whose boundaries lieon edges between objects in the image so a pixel-exactobject segmentation can be accomplished by classifyingsuperpixel patches rather than individual pixels However theboundaries of the superpixels will not match with the edgesof the objects as well if the number of superpixels generatedis too small and the computation will be expensive when thenumber is too large
In this paper we use the image complexity to calculatethe number of superpixels Image complexity is defined as ameasure of the inherent difficulty of finding a true target in agiven image The image complexity metric is determined by
Journal of Sensors 5
the gray-level feature or the edge-level feature [24] Accordingto Rigau et al [25] image complexity depended on theentropy of the image intensity histogram Therefore we usethe entropy to measure the image complexity The followingformula is used to calculate 120598
120598 = minussum119901119894log2
119901119894 (1)
where 119901119894is the probability value of 119894th gray This metric was
originally developed for automatic target recognition How-ever according to lots of experiments we suggest anothernovel use of this metric to choose the number of superpixelsusing the following formula
119873superpixel =120598 times119872
120601 times 100 (2)
where 119872 is the image size and 120601 is a weighted valueAccording to (2) we can find that the number of superpixelsis dependent on the image complexity and the image sizeThebigger 120598 is the more useful information is included in theaerial image Moreover the bigger119872 is the more objects arecontained in the aerial image Therefore 119873superpixel must bebigger whichmeans thatmore superpixels whose boundarieslie on edges between objects in the image are needed tosegment the images However in order to obtain a balancebetween the segmentation accuracy and computation apenalty weight 120601 is introduced in (2)
Testing different types of images which were collectedby our lab we suggest that the internal of 120601 is 6sim13 andin our experiment 120601 is 81 In order to balance under- andoversegmentation several parameters were introduced in (2)According to our research oversegmentation or underseg-mentation is caused by inappropriate numbers of superpixelsFurthermoremore details are included in the complex imageTherefore the entropy 120598 in (2) was introduced to calculatethe image complexity Besides a larger image includes moredetails than smaller one which means that more superpixelsare required for image segmentation Therefore the imagesize 119872 was introduced in (2) Finally the parameter 120601 wasintroduced to suppress the oversegmentation As shown inFigure 2 we can find that the trees buildings and otherobjects are covered by different superpixel patches eventhe trees are adjacent which makes it easy to segmentbuildings and trees From Figure 2 we can also find thatmost of the superpixels cover the pixels which belonged to thesame objects However some boundaries of the superpixelsare missed Therefore 119877edge is implemented to detect thesemissing boundaries in Section 312
312 Refined Superpixel In this paper we use a methodbased on Canny detector to overcome the undersegmenta-tion Canny [26] suggested that in an image edges wereusually defined as sets of points with a strong gradientmagnitude An edge can be of almost arbitrary shape andmay include junctions Therefore if the variance of pixels inthe same superpixel is bigger than the threshold the Cannydetector should be used to refine this superpixel Then thenew boundary of the superpixel could be found otherwisethis superpixel does not need to be refined
In this paper we propose a function 119877edge to determinewhich superpixels need to be refined The function is shownas follows
120590119894gt thr Detection
120590119894le thr No Detection
(3)
where 120590119894is the standard deviation of the 119894th superpixel and
thr is the threshold which is obtained by the experiment Inthis paper we suggest that thr is the threshold whose intervalis [9 19] that is calculated based on [27]
Simply defining thr to be the three-dimensional feature incolor space will cause inconsistencies in clustering behaviorfor different superpixel sizes This produces compact super-pixels that adhere well to image boundaries For smallersuperpixels the converse is true
32 Salient Features Extraction from Refined Superpixels Asuperpixel-based classifier is proposed for segmenting build-ings and trees from a presegmentation image In order totrain the classifier we assign building tree others label toeach superpixel to create the training data and then a salientfeature vector is derived from an entire superpixel In thispaper we extract the color feature corners and texturefeature for training the classifier
321 Color Features In our method 119877119866119861 and 119867119878119881 (huesaturation and value) are extracted to be as color featuresTheinput 119877119866119861 indices fill a color-cube which the 119867119878119881 hexconewas designed to perfectly fit [28] 119877119866119861 is a basic color spaceand it can be transformed to any color space including119867119878119881119884119880119881 At the same time 119867119878119881 is a more reasonable colorspace and it has a relationship with theHumanVision System(HVS) Therefore they were both important for training aclassifierThe following features calculated based on119877119866119861 and119867119878119881 are extracted from each superpixel
119877mean 119866mean 119861mean 119867mean 119878mean and 119881mean themeans of each channel of 119877119866119861 and119867119878119881119877std 119866std 119861std 119867std 119878std and 119881std the standarddeviation of each channel of 119877119866119861 and119867119878119881119877max 119866max 119861max 119867max 119878max and 119881max the value ofthe pixel with the greatest intensity in the superpixel119877min 119866min 119861min 119867min 119878min and 119881min the value of apixel with the lowest intensity in the superpixel
322 Robust FAST Corners Extraction Corner refers to asmall point of interest with variation in two dimensionsThere are many corner detectors which can be classified intotwo categories (1) Corner detector based on edges an edgein an image corresponds to the boundary between two areasand this boundary changes direction at corners Many earlyalgorithms detected corners based on the intensity changes(2) Corner detector based on chained edge lots of methodshave been developed which involved detecting and chainingedges with a view to analyzing the properties of the edgeRosten et al proposed a high-speed corner detectionmethodbased on FAST (Feature from Accelerated Segment Test) and
6 Journal of Sensors
machine learning [29] which is shownby (4)However FASTcorner is not robust because the threshold in (4) is a constantTherefore a novel function which is used to calculate thethreshold is proposed in this paper which is shown by (5)
119878119897
=
119889 119868119897le 119868119888119901minus 119879FAST-corner (darker)
119904 119868119888119901minus 119879FAST-corner le 119868119897 le 119868119888119901 + 119879FAST-corner (similar)
119897 119868119897ge 119868119888119901minus 119879FAST-corner (lighter)
(4)
where 119868119897is the gray values of candidate corners in a superpixel
119868119888119901is the gray values of neighbors around 119868
119897 and119879FAST-corner is
the FAST corner number which is calculated by the followingequation
119879FAST-corner =1198912
(119909119894 119910119894)
(1 (119872 times 119873))sum119872times119873
119894=0
119891 (119909119894 119910119894)
+ 120590 (5)
where120590 is the variance of an aerial image119891(119909 119910) and119891(119909119894 119910119894)
is the value of the 119894th pixel in the image 119891(119909 119910) According to(4) we can find that the bigger120590 is themore FAST corners areextracted from the superpixels because more salient cornersare in an image whose variance is bigger
323 Gabor Textures In our method we use the Gabor filterto extract structure features of buildings and trees Structureis an important feature to segment buildings from street andground and it is also useful to segment trees from grassFurthermore frequency and orientation representations ofGabor filters are similar to those of the Human VisualSystem (HVS) and they have been found to be particularlyappropriate for texture representation and discriminationAmong various approaches for extracting texture featuresGabor filter has emerged as one of the most popular ones[30] A Gabor descriptor of an image is computed by passingthe image through a filter bank of Gabor filter In the spatialdomain a 2D Gabor filter is a Gaussian kernel functionmodulated by a sinusoidal plane wave with a complexsinusoid [31] The function is shown as follows
119892 (119909 119910)
= (1
2120587120590119909120590119910
) exp[minus12(1199092
1205902119909
+1199102
1205902119910
) + 2120587119895Ω119909]
(6)
where Ω is the frequency of the Gabor function and 120590119909and
120590119910determine its bandwidthFrom the zoom-in region of Figure 2 we can find that
(1) buildings have similar color with the ground and streetsand (2) trees and grass have similar color These two char-acteristics make it difficult to segment buildings and treesfrom aerial images However the textures of buildings andtrees are muchmore obvious than ground and grass Besidesin order to balance the conflicting goals of reducing compu-tation while obtaining a satisfying accuracy the number offrequencies 120596 (120596
1= radic21205872 120596
2= radic21205873 120596
3= radic21205874 120596
4=
radic21205875 and 1205965= radic21205876) is 5 and number of orientations 120579
(1205791= 0 120579
2= 1205878 120579
3= 1205874 120579
4= 31205878 120579
5= 1205872 120579
6= 51205878
1205797= 31205874 and 120579
8= 71205878) is 8
Through concatenating the above features based on SVMa salient feature vector is generated for each superpixel Thenwe use this feature vector to train a classifier for building andtree segmentation Finally Naive Bayes classifier is chosen tobe used for tree and building classification in our algorithmbecause it is efficient and easy to be implemented [32]
33 Proposing a Cost Function for Tree Parameters EstimationAfter segmentation a tree location (119909
119879 119910119879) a tree radius
119903119879 and a tree height ℎ
119879are estimated by a cost function
integrating shadows
331 The Proposed Cost Function The tree model matchingis applied to 3 channels 119884 119880 and 119881 of the image 119868(119909 119910)The main advantage of the 119884119880119881model is that the luminanceand the color information are independent Therefore theluminance component can be processed without affecting thecolor contents [33] In order to match trees in 119868(119909 119910) withthe tree model119872(119909 119910) we propose a cost function which isshown as follows
cost = arg min (1199080+ 119908119884119865119884+ 119908119880119865119880+ 119908119881119865119881+ 119908119878119865119878) (7)
where 1199080 119908119884 119908119880 119908119881 and 119908
119878are the weights to control
the convergence speed of the cost function 119865119884 119865119880 and 119865
119881
are used to calculate the root of the square error (RSE) of119884 119880 and 119881 channel between 119868(119909 119910) and119872(119909 119910) within thetreersquos canopy and 119865
119878is used to calculate the RSE of shadows
in 119868(119909 119910) and119872(119909 119910) which is a circle These functions areshown as follows
119865119884(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119884(119909 119910) minus119872
119884(119909 119910)]
2
119865119880(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119880(119909 119910) minus119872
119880(119909 119910)]
2
119865119881(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119881(119909 119910) minus119872
119881(119909 119910)]
2
119865119878(119868119872) = 120596radic
sum
119909119910isin119862119878(119872)
[119868119878(119909 119910) minus119872
119878(119909 119910)]
2
(8)
where 120574 = 1119875 119875 is a weight and 119875 isin [0 1]
119862 (119872) = 119909 119910 | (119909 minus 1199090)2
+ (119910 minus 1199100)2
le 1199032
0
(9)
119862(119872) is supposed to be circular in our algorithm (1199090 1199100)
is the initializing center of the model 1199030is the initializing
radius and 120596 = 1119876 119876 is a weight and 119876 isin [0 1]
119862119878(119872) = 119909 119910 | (119909 minus 119909
119878)2
+ (119910 minus 119910119878)2
le 1199032
0
(10)
119862119878(119872) is also supposed to be a circle and its radius is
the same with the tree model (119909119878 119910119878) is dependent on the
centroid of the tree which is detected In Section 1 we showedthat there was a relationship between tree and its shadow
Journal of Sensors 7
Vertical
Horizontal
S
W
E
N Ground Tree shadow
h
Elevati
on
Azimuth (120572)
Figure 5 The relationship between tree and its shadow
which is shown in Figure 5 and this relationship can becalculated by using the following functions
119909119878= 1199090minus cosminus1120572 cotminus1120573ℎ
0
119910119878= 1199100minus sinminus1120572 cotminus1120573ℎ
0
(11)
where 120572 is the sun azimuth angle 120573 is the sun elevation angleand they could be calculated using the time when the imagewas taken ℎ
0is the tree height (119909
0 1199100) is the center of the
tree crown and (119909119878 119910119878) is the center of the shadow Here we
estimate the tree height ℎ using (11) and the cost function It isnoted that all these parameters are initialization parametersand the unit of the tree parameters is pixel because wecalculate them without additional information
332 The Outline of Calculating Treersquos Parameters In orderto calculate the treersquos parameter the gradient descent methodis employed to achieve iterations The convergence speed isrobust This procedure is shown in the following steps
Step 1 Calculate the gradient value 1198920by the initialization
parameter set int0= (119909
0 1199100) 1199030 ℎ0 where (119909
0 1199100) is the
centroid of a superpixel 1199030= 2 times 119909
0 and ℎ
0= 0
Step 2 Calculate the normvalue of1198920which can be expressed
as 1198921198990 where 119892
0= 5
Step 3 Update the int0using the formula int
1= int
0minus
oldspeed times 1198920
Step 4 Calculate the new gradient value 1198921using int
1
Step 5 Calculate the normvalue of1198921which can be expressed
as 1198921198991
Step 6 Calculate the ratio of 1198920and 1198921 rate119892can be obtained
Step 7 If rate119892gt 119879 newspeed = (rate
119892119871) times oldspeed else
newspeed = oldspeed where 119879 is a threshold 119871 is a constantand 119871 gt 1 and in our experiment 119871 = 100 In ourmethod theinitialization centroid (119909
0 1199100) is the centroid of a superpixel
that belonged to a tree The number of iterations is 600
This procedure is finished until getting the minimumvalue of tree parameters (119909lowast 119910lowast 119903lowast ℎlowast)
Our method was implemented using Microsoft VisualStudio 2010 and Matlab 2010a and this method was codedby integrating C and Matlab The proposed algorithm wastested on many large high-resolution urban images takenfrom Phoenix Arizona USA
4 Results
In our experiment the method is implemented by twosteps (1) the first step is presegmentation and the result iscompared with the result which is got by Turbopixel andEntropy Rate Superpixel (ERS) (2) the second is to segmentbuildings and trees and the segmentation result is comparedto the result got by using Turbopixel and ERS [34] (3) thetreersquos parameters estimation result is evaluated by the rootmean square error (RMSE)
41 Presegmentation Result Figure 2 is an original imagewhich includes trees grass buildings and other objects Thezoom-in area of Figure 2 shows that the tree color is similar tograss color the textures of trees are coarse and salient whilethe textures of grass are smooth Moreover the shapes of build-ings and trees are different Figure 6 shows the presegmenta-tion result By comparing Figures 6(a) 6(b) and 6(c) we canfind that the superpixel in Figure 6(a) was refined by ourmethod It is noted that the number of superpixels is 8200before the aerial images are presegmented by using Turbo-pixels
Figure 6(a) shows the result which is obtained by (3)Theboundaries are marked by red and the boundaries which aregot by (3) are marked by green
42 Segmentation Result Figure 7 shows four segmentationresults the first one is based on our method the second oneis based on the Turbopixels the third one is obtained by usingERS and the last one is ground truth segmentation result Bysubjectively comparing these three results we found that thesegmentation result got by our method is the best Because oftraining the features from the superpixels computation of ourmethod is less than that of the method used by ERS For thesuperpixel-level segmentation the computational complexityis 119874(120598 times 1198722
10
) However the computational complexity ofpixel-level is 119874(119872) 120598 is the image complexity and119872 is thepixel number Therefore the running time of our method isconsiderable which is very important in large scale urbanaerial image processing The average running time of ourmethod is 45 less than the average running time of ERS
Furthermore two standard metrics which were under-segmentation error [35] and boundary recall [36] were usedfor evaluating the quality of superpixels Undersegmentationerror (UE)measures fraction of pixel leak across ground truthboundaries which is shown by (12) The comparison resultsof UE were shown in Figure 8(a)
UET (119878) =sum119894
sum119896119878119896cap119879119894 =⊘
1003816100381610038161003816119878119896 minus 1198791198941003816100381610038161003816
sum119894
10038161003816100381610038161198661198941003816100381610038161003816
(12)
where T = 1198661 1198662 119866
119899 represent ground truth seg-
mentation and 119866119894denotes the segment size and 119878
119896is the 119896th
8 Journal of Sensors
(a) The result based on ourmethod
(b) The result based on Turbo-pixels
(c) The result based on ERS
Figure 6 The comparative presegmentation result
Original images Ground truthERSTurbopixelsProposed method
Figure 7 The comparative segmentation result
superpixel Boundary recall (BR) measures the percentage ofthe natural boundaries recovered by the superpixel bound-aries which is represented by (13) The comparison results ofBR were shown in Figure 8(b)
BRT (119878) =sum119901isin120575T nabla (min
119902isin120575119878
1003817100381710038171003817119901 minus 1199021003817100381710038171003817 lt 120598)
|120575119879| (13)
where 120575T and 120575119878 denote the union sets of ground truthboundaries and superpixel boundaries respectivelyThe indi-cator function nabla checks if the nearest pixel is within distanceIn our experiments we set nabla = 2 These performance metricsare plotted against the number of superpixels in an image
According to Figure 8 we can find that the proposedalgorithm in this paper performs significantly better than
Journal of Sensors 9
ProposedERSTurbopixels
4000 5000 6000 7000 8000 90003000
Number of superpixels per image
005
01
015
02
025
03
035
04
Und
erse
gmen
tatio
n er
ror
(a)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
0
005
01
015
02
025
03
035
04
045
Und
erse
gmen
tatio
n er
ror
(b)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 90002000
Number of superpixels per image
06
065
07
075
08
085
09
095
1
Boun
dary
reca
ll
(c)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
05
06
07
08
09
1
11
12
Boun
dary
reca
ll
(d)
Figure 8 The comparison results of UE and BR (a) Undersegmentation error curves (b) undersegmentation error bar (c) boundary recallcurves (d) boundary recall error bar
the state of the art in all the metrics when the number ofsuperpixels is calculated by the proposed function
43 Building and Tree Classification Result To justify the useof Naive Bayes classifiers which is trained by the proposedalgorithm in our approach we tried the popular intersectionkernel and Chi-square kernel on our feature vector includingcolor FAST corner and Gabor feature for comparisonFigure 9 shows the building and tree classification results withzoom-in regions
44 Treersquos Parameters Estimation Result In our method wecalculated the tree parameters one by one Each tree withshadow was extracted from every segmentation image suchas Figure 7 and then this tree is matched with treemodel thatis presented in this paper The estimation result is shown inthe panel of the GUI when the tree is marked by using redcircular which is shown in Figure 10 After calculating theparameters all of the trees are covered by a round model
RMSE is introduced to evaluate the estimation results and thefunction is shown as follows
RMSE = radic 1
119871
119871
sum
119894=1
(
1003816100381610038161003816119901119894 minus 119901true1003816100381610038161003816
119901true)
2
(14)
where 119871 is the number of trees 119901119894is the estimated parameter
and 119901true is the ground truth of the parameters which aremanually measured It is noted that 119901
119894and 119901true are used to
describe the same tree in the image The RMSE of 119909119879 119910119879 119903119879
and ℎ119879is 1142 pixels 1381 pixels 1993 pixels and 5992 pix-
els respectively At the same time wemanually measured theparameters for 270 trees which are chosen from Figure 9(a)The height of the tree cannot be measured directly becausethe image is 2D However we can measure the parameters ofthe treersquos shadow by human so the height can be calculatedby (11) Therefore the treersquos height calculated by (11) couldbe considered as ground truth Then these ground truth
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 3: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/3.jpg)
Journal of Sensors 3
Figure 1 The overview area of Phoenix USA
However in this work we limit our focus to buildings andtrees Our aim is to produce a label for each pixel in an aerialphotograph indicating whether building or tree is present atits location We are given a high-resolution aerial or satellitephotograph from a nadir viewpoint that includes visible color(119877119866119861 or 119867119878119881) which is an important feature for buildingand tree segmentation We do not consider additional rasterdata that may be available such as LiDAR data infraredhyperspectral data stereo data or digital surface modelsbecause they can be more difficult to obtain Therefore weclaim the following specific contributions
(1) Proposing a method to automatically estimate thesuperpixels number for an aerial photo based onmea-surement of image complexity and detect boundariesof the undersegmentation region The new methodmakes our approach robust against missing or erro-neous metadata about image resolution
(2) Proposing a salient feature vector for training theclassifier which is simple and efficient and easy to beimplemented
(3) Proposing an approach for estimating the locationand radius of a tree crown and the tree height withoutadditional information which is simple and efficientand easy to be implemented
2 Materials
21 StudyArea Thestudy area is located at Phoenix ArizonaUnited States and its location is (33∘271015840N 112∘41015840W) whichis shown in Figure 1 The area of the study region isabout 2917264 km2 Arizona has an abundance of mountainsand plateaus in addition to its desert climate Despite thestatersquos aridity 27 of Arizona is forest The largest stand ofPonderosa pine trees in the world is contained in ArizonaTherefore the geography of Arizona makes it more difficultto segment the buildings and trees from images than fromother areas
22 Aerial Imagery The test images are from urban or sub-urban regions of Arizona USA These aerial images were
Table 1 Main EXIF information of experimental images
Tag ValueManufacturer LeicaModel ADS40DateandTime 20081211 34532ExposureTime 1659 secondsComponentsConfiguration 401MaxApertureValue 20FocalLength 201mmColorSpace sRGBPixelXDimension 6250PixelYDimension 6250
Figure 2 The original image with its zoom-in area
collected at August 2008 using the ADS40 airborne digitalsensor The height taken in the images is 600 meters Thissensor incorporates a line-array of charge-coupled devices(CCDs) and is capable of acquiring visible to near-infraredstereo data at ground resolutions of 05mpixel The detailof this sensor can be found in [22] The resolution of eachaerial image shown in Figure 2 is 8540 times 8540 in thispaper The main EXIF information of experimental imagesis shown in Table 1 Moreover in order to train the classifier50 images which are labeled trees building and others areused and the examples of the original labeled images areshown in Figure 3 whose resolution is 2048 times 1642 pixelsFurthermore 500 images are used to evaluate the proposedalgorithm
3 Proposed Algorithm
In this paper we propose a building and tree segmentationmethod using superpixels from a single large high-resolutionurban image The procedure of this algorithm is shown inFigure 4
31 Presegmentation Based on Refined Simple Superpixel Inthis paper an improved method is proposed to presegmentthe large scale image with a high accuracy This methodis based on Turbopixels whose number of superpixels wasgiven by users However different from the Turbopixels our
4 Journal of Sensors
(a) (b) (c)
Figure 3 Three examples of the original labeled images for classifier training
Start
End
Coarse positioningReceive three or moresignals from mobile
basis stationsLocation estimationbased on TC-OFDM
Obtain the coarsepositioning region
Feature extraction from superpixels
Calculate the colorfulinformation FAST corner extraction extraction
Gabor textures
Building and tree segmentation
Superpixel region combinationCalculate image meansand variation
Building and tree classification
Superpixel region combinationCalculate image meansand variation
Tree parameters calculation
Update the initializationparameter
Calculate the norm value
valueCalculate the gradient
Calculate the newgradient value
Calculate the newnorm value
Calculate the treeparameters
Yes
No
Stop calculating costfunction
Figure 4 The flow chart of our algorithm
method used two formulas to overcome the undersegmenta-tion caused by Turbopixels
In order to use superpixels [14 23] to presegment imagesto reduce computation while preserving exact pixel bound-aries different types of images should need different numbersof superpixels Therefore it is required to automatically cal-culate the number of superpixels according to the processedimages Moreover it is necessary to overcome the under-segmentation by refining results given by TurbopixelsThere-fore we use 119873superpixel that is defined in Section 311 to cal-culate the number of superpixels automatically according tothe image complexity and 119877edge is used to refine the pre-segmentationThis superpixel is called Refined Simple Super-pixel
311 Simple Superpixel Segmentation The aim of superpixelsis to reduce the problem by replacing pixels with regularlyspaced similarly sized image patches whose boundaries lieon edges between objects in the image so a pixel-exactobject segmentation can be accomplished by classifyingsuperpixel patches rather than individual pixels However theboundaries of the superpixels will not match with the edgesof the objects as well if the number of superpixels generatedis too small and the computation will be expensive when thenumber is too large
In this paper we use the image complexity to calculatethe number of superpixels Image complexity is defined as ameasure of the inherent difficulty of finding a true target in agiven image The image complexity metric is determined by
Journal of Sensors 5
the gray-level feature or the edge-level feature [24] Accordingto Rigau et al [25] image complexity depended on theentropy of the image intensity histogram Therefore we usethe entropy to measure the image complexity The followingformula is used to calculate 120598
120598 = minussum119901119894log2
119901119894 (1)
where 119901119894is the probability value of 119894th gray This metric was
originally developed for automatic target recognition How-ever according to lots of experiments we suggest anothernovel use of this metric to choose the number of superpixelsusing the following formula
119873superpixel =120598 times119872
120601 times 100 (2)
where 119872 is the image size and 120601 is a weighted valueAccording to (2) we can find that the number of superpixelsis dependent on the image complexity and the image sizeThebigger 120598 is the more useful information is included in theaerial image Moreover the bigger119872 is the more objects arecontained in the aerial image Therefore 119873superpixel must bebigger whichmeans thatmore superpixels whose boundarieslie on edges between objects in the image are needed tosegment the images However in order to obtain a balancebetween the segmentation accuracy and computation apenalty weight 120601 is introduced in (2)
Testing different types of images which were collectedby our lab we suggest that the internal of 120601 is 6sim13 andin our experiment 120601 is 81 In order to balance under- andoversegmentation several parameters were introduced in (2)According to our research oversegmentation or underseg-mentation is caused by inappropriate numbers of superpixelsFurthermoremore details are included in the complex imageTherefore the entropy 120598 in (2) was introduced to calculatethe image complexity Besides a larger image includes moredetails than smaller one which means that more superpixelsare required for image segmentation Therefore the imagesize 119872 was introduced in (2) Finally the parameter 120601 wasintroduced to suppress the oversegmentation As shown inFigure 2 we can find that the trees buildings and otherobjects are covered by different superpixel patches eventhe trees are adjacent which makes it easy to segmentbuildings and trees From Figure 2 we can also find thatmost of the superpixels cover the pixels which belonged to thesame objects However some boundaries of the superpixelsare missed Therefore 119877edge is implemented to detect thesemissing boundaries in Section 312
312 Refined Superpixel In this paper we use a methodbased on Canny detector to overcome the undersegmenta-tion Canny [26] suggested that in an image edges wereusually defined as sets of points with a strong gradientmagnitude An edge can be of almost arbitrary shape andmay include junctions Therefore if the variance of pixels inthe same superpixel is bigger than the threshold the Cannydetector should be used to refine this superpixel Then thenew boundary of the superpixel could be found otherwisethis superpixel does not need to be refined
In this paper we propose a function 119877edge to determinewhich superpixels need to be refined The function is shownas follows
120590119894gt thr Detection
120590119894le thr No Detection
(3)
where 120590119894is the standard deviation of the 119894th superpixel and
thr is the threshold which is obtained by the experiment Inthis paper we suggest that thr is the threshold whose intervalis [9 19] that is calculated based on [27]
Simply defining thr to be the three-dimensional feature incolor space will cause inconsistencies in clustering behaviorfor different superpixel sizes This produces compact super-pixels that adhere well to image boundaries For smallersuperpixels the converse is true
32 Salient Features Extraction from Refined Superpixels Asuperpixel-based classifier is proposed for segmenting build-ings and trees from a presegmentation image In order totrain the classifier we assign building tree others label toeach superpixel to create the training data and then a salientfeature vector is derived from an entire superpixel In thispaper we extract the color feature corners and texturefeature for training the classifier
321 Color Features In our method 119877119866119861 and 119867119878119881 (huesaturation and value) are extracted to be as color featuresTheinput 119877119866119861 indices fill a color-cube which the 119867119878119881 hexconewas designed to perfectly fit [28] 119877119866119861 is a basic color spaceand it can be transformed to any color space including119867119878119881119884119880119881 At the same time 119867119878119881 is a more reasonable colorspace and it has a relationship with theHumanVision System(HVS) Therefore they were both important for training aclassifierThe following features calculated based on119877119866119861 and119867119878119881 are extracted from each superpixel
119877mean 119866mean 119861mean 119867mean 119878mean and 119881mean themeans of each channel of 119877119866119861 and119867119878119881119877std 119866std 119861std 119867std 119878std and 119881std the standarddeviation of each channel of 119877119866119861 and119867119878119881119877max 119866max 119861max 119867max 119878max and 119881max the value ofthe pixel with the greatest intensity in the superpixel119877min 119866min 119861min 119867min 119878min and 119881min the value of apixel with the lowest intensity in the superpixel
322 Robust FAST Corners Extraction Corner refers to asmall point of interest with variation in two dimensionsThere are many corner detectors which can be classified intotwo categories (1) Corner detector based on edges an edgein an image corresponds to the boundary between two areasand this boundary changes direction at corners Many earlyalgorithms detected corners based on the intensity changes(2) Corner detector based on chained edge lots of methodshave been developed which involved detecting and chainingedges with a view to analyzing the properties of the edgeRosten et al proposed a high-speed corner detectionmethodbased on FAST (Feature from Accelerated Segment Test) and
6 Journal of Sensors
machine learning [29] which is shownby (4)However FASTcorner is not robust because the threshold in (4) is a constantTherefore a novel function which is used to calculate thethreshold is proposed in this paper which is shown by (5)
119878119897
=
119889 119868119897le 119868119888119901minus 119879FAST-corner (darker)
119904 119868119888119901minus 119879FAST-corner le 119868119897 le 119868119888119901 + 119879FAST-corner (similar)
119897 119868119897ge 119868119888119901minus 119879FAST-corner (lighter)
(4)
where 119868119897is the gray values of candidate corners in a superpixel
119868119888119901is the gray values of neighbors around 119868
119897 and119879FAST-corner is
the FAST corner number which is calculated by the followingequation
119879FAST-corner =1198912
(119909119894 119910119894)
(1 (119872 times 119873))sum119872times119873
119894=0
119891 (119909119894 119910119894)
+ 120590 (5)
where120590 is the variance of an aerial image119891(119909 119910) and119891(119909119894 119910119894)
is the value of the 119894th pixel in the image 119891(119909 119910) According to(4) we can find that the bigger120590 is themore FAST corners areextracted from the superpixels because more salient cornersare in an image whose variance is bigger
323 Gabor Textures In our method we use the Gabor filterto extract structure features of buildings and trees Structureis an important feature to segment buildings from street andground and it is also useful to segment trees from grassFurthermore frequency and orientation representations ofGabor filters are similar to those of the Human VisualSystem (HVS) and they have been found to be particularlyappropriate for texture representation and discriminationAmong various approaches for extracting texture featuresGabor filter has emerged as one of the most popular ones[30] A Gabor descriptor of an image is computed by passingthe image through a filter bank of Gabor filter In the spatialdomain a 2D Gabor filter is a Gaussian kernel functionmodulated by a sinusoidal plane wave with a complexsinusoid [31] The function is shown as follows
119892 (119909 119910)
= (1
2120587120590119909120590119910
) exp[minus12(1199092
1205902119909
+1199102
1205902119910
) + 2120587119895Ω119909]
(6)
where Ω is the frequency of the Gabor function and 120590119909and
120590119910determine its bandwidthFrom the zoom-in region of Figure 2 we can find that
(1) buildings have similar color with the ground and streetsand (2) trees and grass have similar color These two char-acteristics make it difficult to segment buildings and treesfrom aerial images However the textures of buildings andtrees are muchmore obvious than ground and grass Besidesin order to balance the conflicting goals of reducing compu-tation while obtaining a satisfying accuracy the number offrequencies 120596 (120596
1= radic21205872 120596
2= radic21205873 120596
3= radic21205874 120596
4=
radic21205875 and 1205965= radic21205876) is 5 and number of orientations 120579
(1205791= 0 120579
2= 1205878 120579
3= 1205874 120579
4= 31205878 120579
5= 1205872 120579
6= 51205878
1205797= 31205874 and 120579
8= 71205878) is 8
Through concatenating the above features based on SVMa salient feature vector is generated for each superpixel Thenwe use this feature vector to train a classifier for building andtree segmentation Finally Naive Bayes classifier is chosen tobe used for tree and building classification in our algorithmbecause it is efficient and easy to be implemented [32]
33 Proposing a Cost Function for Tree Parameters EstimationAfter segmentation a tree location (119909
119879 119910119879) a tree radius
119903119879 and a tree height ℎ
119879are estimated by a cost function
integrating shadows
331 The Proposed Cost Function The tree model matchingis applied to 3 channels 119884 119880 and 119881 of the image 119868(119909 119910)The main advantage of the 119884119880119881model is that the luminanceand the color information are independent Therefore theluminance component can be processed without affecting thecolor contents [33] In order to match trees in 119868(119909 119910) withthe tree model119872(119909 119910) we propose a cost function which isshown as follows
cost = arg min (1199080+ 119908119884119865119884+ 119908119880119865119880+ 119908119881119865119881+ 119908119878119865119878) (7)
where 1199080 119908119884 119908119880 119908119881 and 119908
119878are the weights to control
the convergence speed of the cost function 119865119884 119865119880 and 119865
119881
are used to calculate the root of the square error (RSE) of119884 119880 and 119881 channel between 119868(119909 119910) and119872(119909 119910) within thetreersquos canopy and 119865
119878is used to calculate the RSE of shadows
in 119868(119909 119910) and119872(119909 119910) which is a circle These functions areshown as follows
119865119884(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119884(119909 119910) minus119872
119884(119909 119910)]
2
119865119880(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119880(119909 119910) minus119872
119880(119909 119910)]
2
119865119881(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119881(119909 119910) minus119872
119881(119909 119910)]
2
119865119878(119868119872) = 120596radic
sum
119909119910isin119862119878(119872)
[119868119878(119909 119910) minus119872
119878(119909 119910)]
2
(8)
where 120574 = 1119875 119875 is a weight and 119875 isin [0 1]
119862 (119872) = 119909 119910 | (119909 minus 1199090)2
+ (119910 minus 1199100)2
le 1199032
0
(9)
119862(119872) is supposed to be circular in our algorithm (1199090 1199100)
is the initializing center of the model 1199030is the initializing
radius and 120596 = 1119876 119876 is a weight and 119876 isin [0 1]
119862119878(119872) = 119909 119910 | (119909 minus 119909
119878)2
+ (119910 minus 119910119878)2
le 1199032
0
(10)
119862119878(119872) is also supposed to be a circle and its radius is
the same with the tree model (119909119878 119910119878) is dependent on the
centroid of the tree which is detected In Section 1 we showedthat there was a relationship between tree and its shadow
Journal of Sensors 7
Vertical
Horizontal
S
W
E
N Ground Tree shadow
h
Elevati
on
Azimuth (120572)
Figure 5 The relationship between tree and its shadow
which is shown in Figure 5 and this relationship can becalculated by using the following functions
119909119878= 1199090minus cosminus1120572 cotminus1120573ℎ
0
119910119878= 1199100minus sinminus1120572 cotminus1120573ℎ
0
(11)
where 120572 is the sun azimuth angle 120573 is the sun elevation angleand they could be calculated using the time when the imagewas taken ℎ
0is the tree height (119909
0 1199100) is the center of the
tree crown and (119909119878 119910119878) is the center of the shadow Here we
estimate the tree height ℎ using (11) and the cost function It isnoted that all these parameters are initialization parametersand the unit of the tree parameters is pixel because wecalculate them without additional information
332 The Outline of Calculating Treersquos Parameters In orderto calculate the treersquos parameter the gradient descent methodis employed to achieve iterations The convergence speed isrobust This procedure is shown in the following steps
Step 1 Calculate the gradient value 1198920by the initialization
parameter set int0= (119909
0 1199100) 1199030 ℎ0 where (119909
0 1199100) is the
centroid of a superpixel 1199030= 2 times 119909
0 and ℎ
0= 0
Step 2 Calculate the normvalue of1198920which can be expressed
as 1198921198990 where 119892
0= 5
Step 3 Update the int0using the formula int
1= int
0minus
oldspeed times 1198920
Step 4 Calculate the new gradient value 1198921using int
1
Step 5 Calculate the normvalue of1198921which can be expressed
as 1198921198991
Step 6 Calculate the ratio of 1198920and 1198921 rate119892can be obtained
Step 7 If rate119892gt 119879 newspeed = (rate
119892119871) times oldspeed else
newspeed = oldspeed where 119879 is a threshold 119871 is a constantand 119871 gt 1 and in our experiment 119871 = 100 In ourmethod theinitialization centroid (119909
0 1199100) is the centroid of a superpixel
that belonged to a tree The number of iterations is 600
This procedure is finished until getting the minimumvalue of tree parameters (119909lowast 119910lowast 119903lowast ℎlowast)
Our method was implemented using Microsoft VisualStudio 2010 and Matlab 2010a and this method was codedby integrating C and Matlab The proposed algorithm wastested on many large high-resolution urban images takenfrom Phoenix Arizona USA
4 Results
In our experiment the method is implemented by twosteps (1) the first step is presegmentation and the result iscompared with the result which is got by Turbopixel andEntropy Rate Superpixel (ERS) (2) the second is to segmentbuildings and trees and the segmentation result is comparedto the result got by using Turbopixel and ERS [34] (3) thetreersquos parameters estimation result is evaluated by the rootmean square error (RMSE)
41 Presegmentation Result Figure 2 is an original imagewhich includes trees grass buildings and other objects Thezoom-in area of Figure 2 shows that the tree color is similar tograss color the textures of trees are coarse and salient whilethe textures of grass are smooth Moreover the shapes of build-ings and trees are different Figure 6 shows the presegmenta-tion result By comparing Figures 6(a) 6(b) and 6(c) we canfind that the superpixel in Figure 6(a) was refined by ourmethod It is noted that the number of superpixels is 8200before the aerial images are presegmented by using Turbo-pixels
Figure 6(a) shows the result which is obtained by (3)Theboundaries are marked by red and the boundaries which aregot by (3) are marked by green
42 Segmentation Result Figure 7 shows four segmentationresults the first one is based on our method the second oneis based on the Turbopixels the third one is obtained by usingERS and the last one is ground truth segmentation result Bysubjectively comparing these three results we found that thesegmentation result got by our method is the best Because oftraining the features from the superpixels computation of ourmethod is less than that of the method used by ERS For thesuperpixel-level segmentation the computational complexityis 119874(120598 times 1198722
10
) However the computational complexity ofpixel-level is 119874(119872) 120598 is the image complexity and119872 is thepixel number Therefore the running time of our method isconsiderable which is very important in large scale urbanaerial image processing The average running time of ourmethod is 45 less than the average running time of ERS
Furthermore two standard metrics which were under-segmentation error [35] and boundary recall [36] were usedfor evaluating the quality of superpixels Undersegmentationerror (UE)measures fraction of pixel leak across ground truthboundaries which is shown by (12) The comparison resultsof UE were shown in Figure 8(a)
UET (119878) =sum119894
sum119896119878119896cap119879119894 =⊘
1003816100381610038161003816119878119896 minus 1198791198941003816100381610038161003816
sum119894
10038161003816100381610038161198661198941003816100381610038161003816
(12)
where T = 1198661 1198662 119866
119899 represent ground truth seg-
mentation and 119866119894denotes the segment size and 119878
119896is the 119896th
8 Journal of Sensors
(a) The result based on ourmethod
(b) The result based on Turbo-pixels
(c) The result based on ERS
Figure 6 The comparative presegmentation result
Original images Ground truthERSTurbopixelsProposed method
Figure 7 The comparative segmentation result
superpixel Boundary recall (BR) measures the percentage ofthe natural boundaries recovered by the superpixel bound-aries which is represented by (13) The comparison results ofBR were shown in Figure 8(b)
BRT (119878) =sum119901isin120575T nabla (min
119902isin120575119878
1003817100381710038171003817119901 minus 1199021003817100381710038171003817 lt 120598)
|120575119879| (13)
where 120575T and 120575119878 denote the union sets of ground truthboundaries and superpixel boundaries respectivelyThe indi-cator function nabla checks if the nearest pixel is within distanceIn our experiments we set nabla = 2 These performance metricsare plotted against the number of superpixels in an image
According to Figure 8 we can find that the proposedalgorithm in this paper performs significantly better than
Journal of Sensors 9
ProposedERSTurbopixels
4000 5000 6000 7000 8000 90003000
Number of superpixels per image
005
01
015
02
025
03
035
04
Und
erse
gmen
tatio
n er
ror
(a)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
0
005
01
015
02
025
03
035
04
045
Und
erse
gmen
tatio
n er
ror
(b)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 90002000
Number of superpixels per image
06
065
07
075
08
085
09
095
1
Boun
dary
reca
ll
(c)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
05
06
07
08
09
1
11
12
Boun
dary
reca
ll
(d)
Figure 8 The comparison results of UE and BR (a) Undersegmentation error curves (b) undersegmentation error bar (c) boundary recallcurves (d) boundary recall error bar
the state of the art in all the metrics when the number ofsuperpixels is calculated by the proposed function
43 Building and Tree Classification Result To justify the useof Naive Bayes classifiers which is trained by the proposedalgorithm in our approach we tried the popular intersectionkernel and Chi-square kernel on our feature vector includingcolor FAST corner and Gabor feature for comparisonFigure 9 shows the building and tree classification results withzoom-in regions
44 Treersquos Parameters Estimation Result In our method wecalculated the tree parameters one by one Each tree withshadow was extracted from every segmentation image suchas Figure 7 and then this tree is matched with treemodel thatis presented in this paper The estimation result is shown inthe panel of the GUI when the tree is marked by using redcircular which is shown in Figure 10 After calculating theparameters all of the trees are covered by a round model
RMSE is introduced to evaluate the estimation results and thefunction is shown as follows
RMSE = radic 1
119871
119871
sum
119894=1
(
1003816100381610038161003816119901119894 minus 119901true1003816100381610038161003816
119901true)
2
(14)
where 119871 is the number of trees 119901119894is the estimated parameter
and 119901true is the ground truth of the parameters which aremanually measured It is noted that 119901
119894and 119901true are used to
describe the same tree in the image The RMSE of 119909119879 119910119879 119903119879
and ℎ119879is 1142 pixels 1381 pixels 1993 pixels and 5992 pix-
els respectively At the same time wemanually measured theparameters for 270 trees which are chosen from Figure 9(a)The height of the tree cannot be measured directly becausethe image is 2D However we can measure the parameters ofthe treersquos shadow by human so the height can be calculatedby (11) Therefore the treersquos height calculated by (11) couldbe considered as ground truth Then these ground truth
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 4: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/4.jpg)
4 Journal of Sensors
(a) (b) (c)
Figure 3 Three examples of the original labeled images for classifier training
Start
End
Coarse positioningReceive three or moresignals from mobile
basis stationsLocation estimationbased on TC-OFDM
Obtain the coarsepositioning region
Feature extraction from superpixels
Calculate the colorfulinformation FAST corner extraction extraction
Gabor textures
Building and tree segmentation
Superpixel region combinationCalculate image meansand variation
Building and tree classification
Superpixel region combinationCalculate image meansand variation
Tree parameters calculation
Update the initializationparameter
Calculate the norm value
valueCalculate the gradient
Calculate the newgradient value
Calculate the newnorm value
Calculate the treeparameters
Yes
No
Stop calculating costfunction
Figure 4 The flow chart of our algorithm
method used two formulas to overcome the undersegmenta-tion caused by Turbopixels
In order to use superpixels [14 23] to presegment imagesto reduce computation while preserving exact pixel bound-aries different types of images should need different numbersof superpixels Therefore it is required to automatically cal-culate the number of superpixels according to the processedimages Moreover it is necessary to overcome the under-segmentation by refining results given by TurbopixelsThere-fore we use 119873superpixel that is defined in Section 311 to cal-culate the number of superpixels automatically according tothe image complexity and 119877edge is used to refine the pre-segmentationThis superpixel is called Refined Simple Super-pixel
311 Simple Superpixel Segmentation The aim of superpixelsis to reduce the problem by replacing pixels with regularlyspaced similarly sized image patches whose boundaries lieon edges between objects in the image so a pixel-exactobject segmentation can be accomplished by classifyingsuperpixel patches rather than individual pixels However theboundaries of the superpixels will not match with the edgesof the objects as well if the number of superpixels generatedis too small and the computation will be expensive when thenumber is too large
In this paper we use the image complexity to calculatethe number of superpixels Image complexity is defined as ameasure of the inherent difficulty of finding a true target in agiven image The image complexity metric is determined by
Journal of Sensors 5
the gray-level feature or the edge-level feature [24] Accordingto Rigau et al [25] image complexity depended on theentropy of the image intensity histogram Therefore we usethe entropy to measure the image complexity The followingformula is used to calculate 120598
120598 = minussum119901119894log2
119901119894 (1)
where 119901119894is the probability value of 119894th gray This metric was
originally developed for automatic target recognition How-ever according to lots of experiments we suggest anothernovel use of this metric to choose the number of superpixelsusing the following formula
119873superpixel =120598 times119872
120601 times 100 (2)
where 119872 is the image size and 120601 is a weighted valueAccording to (2) we can find that the number of superpixelsis dependent on the image complexity and the image sizeThebigger 120598 is the more useful information is included in theaerial image Moreover the bigger119872 is the more objects arecontained in the aerial image Therefore 119873superpixel must bebigger whichmeans thatmore superpixels whose boundarieslie on edges between objects in the image are needed tosegment the images However in order to obtain a balancebetween the segmentation accuracy and computation apenalty weight 120601 is introduced in (2)
Testing different types of images which were collectedby our lab we suggest that the internal of 120601 is 6sim13 andin our experiment 120601 is 81 In order to balance under- andoversegmentation several parameters were introduced in (2)According to our research oversegmentation or underseg-mentation is caused by inappropriate numbers of superpixelsFurthermoremore details are included in the complex imageTherefore the entropy 120598 in (2) was introduced to calculatethe image complexity Besides a larger image includes moredetails than smaller one which means that more superpixelsare required for image segmentation Therefore the imagesize 119872 was introduced in (2) Finally the parameter 120601 wasintroduced to suppress the oversegmentation As shown inFigure 2 we can find that the trees buildings and otherobjects are covered by different superpixel patches eventhe trees are adjacent which makes it easy to segmentbuildings and trees From Figure 2 we can also find thatmost of the superpixels cover the pixels which belonged to thesame objects However some boundaries of the superpixelsare missed Therefore 119877edge is implemented to detect thesemissing boundaries in Section 312
312 Refined Superpixel In this paper we use a methodbased on Canny detector to overcome the undersegmenta-tion Canny [26] suggested that in an image edges wereusually defined as sets of points with a strong gradientmagnitude An edge can be of almost arbitrary shape andmay include junctions Therefore if the variance of pixels inthe same superpixel is bigger than the threshold the Cannydetector should be used to refine this superpixel Then thenew boundary of the superpixel could be found otherwisethis superpixel does not need to be refined
In this paper we propose a function 119877edge to determinewhich superpixels need to be refined The function is shownas follows
120590119894gt thr Detection
120590119894le thr No Detection
(3)
where 120590119894is the standard deviation of the 119894th superpixel and
thr is the threshold which is obtained by the experiment Inthis paper we suggest that thr is the threshold whose intervalis [9 19] that is calculated based on [27]
Simply defining thr to be the three-dimensional feature incolor space will cause inconsistencies in clustering behaviorfor different superpixel sizes This produces compact super-pixels that adhere well to image boundaries For smallersuperpixels the converse is true
32 Salient Features Extraction from Refined Superpixels Asuperpixel-based classifier is proposed for segmenting build-ings and trees from a presegmentation image In order totrain the classifier we assign building tree others label toeach superpixel to create the training data and then a salientfeature vector is derived from an entire superpixel In thispaper we extract the color feature corners and texturefeature for training the classifier
321 Color Features In our method 119877119866119861 and 119867119878119881 (huesaturation and value) are extracted to be as color featuresTheinput 119877119866119861 indices fill a color-cube which the 119867119878119881 hexconewas designed to perfectly fit [28] 119877119866119861 is a basic color spaceand it can be transformed to any color space including119867119878119881119884119880119881 At the same time 119867119878119881 is a more reasonable colorspace and it has a relationship with theHumanVision System(HVS) Therefore they were both important for training aclassifierThe following features calculated based on119877119866119861 and119867119878119881 are extracted from each superpixel
119877mean 119866mean 119861mean 119867mean 119878mean and 119881mean themeans of each channel of 119877119866119861 and119867119878119881119877std 119866std 119861std 119867std 119878std and 119881std the standarddeviation of each channel of 119877119866119861 and119867119878119881119877max 119866max 119861max 119867max 119878max and 119881max the value ofthe pixel with the greatest intensity in the superpixel119877min 119866min 119861min 119867min 119878min and 119881min the value of apixel with the lowest intensity in the superpixel
322 Robust FAST Corners Extraction Corner refers to asmall point of interest with variation in two dimensionsThere are many corner detectors which can be classified intotwo categories (1) Corner detector based on edges an edgein an image corresponds to the boundary between two areasand this boundary changes direction at corners Many earlyalgorithms detected corners based on the intensity changes(2) Corner detector based on chained edge lots of methodshave been developed which involved detecting and chainingedges with a view to analyzing the properties of the edgeRosten et al proposed a high-speed corner detectionmethodbased on FAST (Feature from Accelerated Segment Test) and
6 Journal of Sensors
machine learning [29] which is shownby (4)However FASTcorner is not robust because the threshold in (4) is a constantTherefore a novel function which is used to calculate thethreshold is proposed in this paper which is shown by (5)
119878119897
=
119889 119868119897le 119868119888119901minus 119879FAST-corner (darker)
119904 119868119888119901minus 119879FAST-corner le 119868119897 le 119868119888119901 + 119879FAST-corner (similar)
119897 119868119897ge 119868119888119901minus 119879FAST-corner (lighter)
(4)
where 119868119897is the gray values of candidate corners in a superpixel
119868119888119901is the gray values of neighbors around 119868
119897 and119879FAST-corner is
the FAST corner number which is calculated by the followingequation
119879FAST-corner =1198912
(119909119894 119910119894)
(1 (119872 times 119873))sum119872times119873
119894=0
119891 (119909119894 119910119894)
+ 120590 (5)
where120590 is the variance of an aerial image119891(119909 119910) and119891(119909119894 119910119894)
is the value of the 119894th pixel in the image 119891(119909 119910) According to(4) we can find that the bigger120590 is themore FAST corners areextracted from the superpixels because more salient cornersare in an image whose variance is bigger
323 Gabor Textures In our method we use the Gabor filterto extract structure features of buildings and trees Structureis an important feature to segment buildings from street andground and it is also useful to segment trees from grassFurthermore frequency and orientation representations ofGabor filters are similar to those of the Human VisualSystem (HVS) and they have been found to be particularlyappropriate for texture representation and discriminationAmong various approaches for extracting texture featuresGabor filter has emerged as one of the most popular ones[30] A Gabor descriptor of an image is computed by passingthe image through a filter bank of Gabor filter In the spatialdomain a 2D Gabor filter is a Gaussian kernel functionmodulated by a sinusoidal plane wave with a complexsinusoid [31] The function is shown as follows
119892 (119909 119910)
= (1
2120587120590119909120590119910
) exp[minus12(1199092
1205902119909
+1199102
1205902119910
) + 2120587119895Ω119909]
(6)
where Ω is the frequency of the Gabor function and 120590119909and
120590119910determine its bandwidthFrom the zoom-in region of Figure 2 we can find that
(1) buildings have similar color with the ground and streetsand (2) trees and grass have similar color These two char-acteristics make it difficult to segment buildings and treesfrom aerial images However the textures of buildings andtrees are muchmore obvious than ground and grass Besidesin order to balance the conflicting goals of reducing compu-tation while obtaining a satisfying accuracy the number offrequencies 120596 (120596
1= radic21205872 120596
2= radic21205873 120596
3= radic21205874 120596
4=
radic21205875 and 1205965= radic21205876) is 5 and number of orientations 120579
(1205791= 0 120579
2= 1205878 120579
3= 1205874 120579
4= 31205878 120579
5= 1205872 120579
6= 51205878
1205797= 31205874 and 120579
8= 71205878) is 8
Through concatenating the above features based on SVMa salient feature vector is generated for each superpixel Thenwe use this feature vector to train a classifier for building andtree segmentation Finally Naive Bayes classifier is chosen tobe used for tree and building classification in our algorithmbecause it is efficient and easy to be implemented [32]
33 Proposing a Cost Function for Tree Parameters EstimationAfter segmentation a tree location (119909
119879 119910119879) a tree radius
119903119879 and a tree height ℎ
119879are estimated by a cost function
integrating shadows
331 The Proposed Cost Function The tree model matchingis applied to 3 channels 119884 119880 and 119881 of the image 119868(119909 119910)The main advantage of the 119884119880119881model is that the luminanceand the color information are independent Therefore theluminance component can be processed without affecting thecolor contents [33] In order to match trees in 119868(119909 119910) withthe tree model119872(119909 119910) we propose a cost function which isshown as follows
cost = arg min (1199080+ 119908119884119865119884+ 119908119880119865119880+ 119908119881119865119881+ 119908119878119865119878) (7)
where 1199080 119908119884 119908119880 119908119881 and 119908
119878are the weights to control
the convergence speed of the cost function 119865119884 119865119880 and 119865
119881
are used to calculate the root of the square error (RSE) of119884 119880 and 119881 channel between 119868(119909 119910) and119872(119909 119910) within thetreersquos canopy and 119865
119878is used to calculate the RSE of shadows
in 119868(119909 119910) and119872(119909 119910) which is a circle These functions areshown as follows
119865119884(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119884(119909 119910) minus119872
119884(119909 119910)]
2
119865119880(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119880(119909 119910) minus119872
119880(119909 119910)]
2
119865119881(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119881(119909 119910) minus119872
119881(119909 119910)]
2
119865119878(119868119872) = 120596radic
sum
119909119910isin119862119878(119872)
[119868119878(119909 119910) minus119872
119878(119909 119910)]
2
(8)
where 120574 = 1119875 119875 is a weight and 119875 isin [0 1]
119862 (119872) = 119909 119910 | (119909 minus 1199090)2
+ (119910 minus 1199100)2
le 1199032
0
(9)
119862(119872) is supposed to be circular in our algorithm (1199090 1199100)
is the initializing center of the model 1199030is the initializing
radius and 120596 = 1119876 119876 is a weight and 119876 isin [0 1]
119862119878(119872) = 119909 119910 | (119909 minus 119909
119878)2
+ (119910 minus 119910119878)2
le 1199032
0
(10)
119862119878(119872) is also supposed to be a circle and its radius is
the same with the tree model (119909119878 119910119878) is dependent on the
centroid of the tree which is detected In Section 1 we showedthat there was a relationship between tree and its shadow
Journal of Sensors 7
Vertical
Horizontal
S
W
E
N Ground Tree shadow
h
Elevati
on
Azimuth (120572)
Figure 5 The relationship between tree and its shadow
which is shown in Figure 5 and this relationship can becalculated by using the following functions
119909119878= 1199090minus cosminus1120572 cotminus1120573ℎ
0
119910119878= 1199100minus sinminus1120572 cotminus1120573ℎ
0
(11)
where 120572 is the sun azimuth angle 120573 is the sun elevation angleand they could be calculated using the time when the imagewas taken ℎ
0is the tree height (119909
0 1199100) is the center of the
tree crown and (119909119878 119910119878) is the center of the shadow Here we
estimate the tree height ℎ using (11) and the cost function It isnoted that all these parameters are initialization parametersand the unit of the tree parameters is pixel because wecalculate them without additional information
332 The Outline of Calculating Treersquos Parameters In orderto calculate the treersquos parameter the gradient descent methodis employed to achieve iterations The convergence speed isrobust This procedure is shown in the following steps
Step 1 Calculate the gradient value 1198920by the initialization
parameter set int0= (119909
0 1199100) 1199030 ℎ0 where (119909
0 1199100) is the
centroid of a superpixel 1199030= 2 times 119909
0 and ℎ
0= 0
Step 2 Calculate the normvalue of1198920which can be expressed
as 1198921198990 where 119892
0= 5
Step 3 Update the int0using the formula int
1= int
0minus
oldspeed times 1198920
Step 4 Calculate the new gradient value 1198921using int
1
Step 5 Calculate the normvalue of1198921which can be expressed
as 1198921198991
Step 6 Calculate the ratio of 1198920and 1198921 rate119892can be obtained
Step 7 If rate119892gt 119879 newspeed = (rate
119892119871) times oldspeed else
newspeed = oldspeed where 119879 is a threshold 119871 is a constantand 119871 gt 1 and in our experiment 119871 = 100 In ourmethod theinitialization centroid (119909
0 1199100) is the centroid of a superpixel
that belonged to a tree The number of iterations is 600
This procedure is finished until getting the minimumvalue of tree parameters (119909lowast 119910lowast 119903lowast ℎlowast)
Our method was implemented using Microsoft VisualStudio 2010 and Matlab 2010a and this method was codedby integrating C and Matlab The proposed algorithm wastested on many large high-resolution urban images takenfrom Phoenix Arizona USA
4 Results
In our experiment the method is implemented by twosteps (1) the first step is presegmentation and the result iscompared with the result which is got by Turbopixel andEntropy Rate Superpixel (ERS) (2) the second is to segmentbuildings and trees and the segmentation result is comparedto the result got by using Turbopixel and ERS [34] (3) thetreersquos parameters estimation result is evaluated by the rootmean square error (RMSE)
41 Presegmentation Result Figure 2 is an original imagewhich includes trees grass buildings and other objects Thezoom-in area of Figure 2 shows that the tree color is similar tograss color the textures of trees are coarse and salient whilethe textures of grass are smooth Moreover the shapes of build-ings and trees are different Figure 6 shows the presegmenta-tion result By comparing Figures 6(a) 6(b) and 6(c) we canfind that the superpixel in Figure 6(a) was refined by ourmethod It is noted that the number of superpixels is 8200before the aerial images are presegmented by using Turbo-pixels
Figure 6(a) shows the result which is obtained by (3)Theboundaries are marked by red and the boundaries which aregot by (3) are marked by green
42 Segmentation Result Figure 7 shows four segmentationresults the first one is based on our method the second oneis based on the Turbopixels the third one is obtained by usingERS and the last one is ground truth segmentation result Bysubjectively comparing these three results we found that thesegmentation result got by our method is the best Because oftraining the features from the superpixels computation of ourmethod is less than that of the method used by ERS For thesuperpixel-level segmentation the computational complexityis 119874(120598 times 1198722
10
) However the computational complexity ofpixel-level is 119874(119872) 120598 is the image complexity and119872 is thepixel number Therefore the running time of our method isconsiderable which is very important in large scale urbanaerial image processing The average running time of ourmethod is 45 less than the average running time of ERS
Furthermore two standard metrics which were under-segmentation error [35] and boundary recall [36] were usedfor evaluating the quality of superpixels Undersegmentationerror (UE)measures fraction of pixel leak across ground truthboundaries which is shown by (12) The comparison resultsof UE were shown in Figure 8(a)
UET (119878) =sum119894
sum119896119878119896cap119879119894 =⊘
1003816100381610038161003816119878119896 minus 1198791198941003816100381610038161003816
sum119894
10038161003816100381610038161198661198941003816100381610038161003816
(12)
where T = 1198661 1198662 119866
119899 represent ground truth seg-
mentation and 119866119894denotes the segment size and 119878
119896is the 119896th
8 Journal of Sensors
(a) The result based on ourmethod
(b) The result based on Turbo-pixels
(c) The result based on ERS
Figure 6 The comparative presegmentation result
Original images Ground truthERSTurbopixelsProposed method
Figure 7 The comparative segmentation result
superpixel Boundary recall (BR) measures the percentage ofthe natural boundaries recovered by the superpixel bound-aries which is represented by (13) The comparison results ofBR were shown in Figure 8(b)
BRT (119878) =sum119901isin120575T nabla (min
119902isin120575119878
1003817100381710038171003817119901 minus 1199021003817100381710038171003817 lt 120598)
|120575119879| (13)
where 120575T and 120575119878 denote the union sets of ground truthboundaries and superpixel boundaries respectivelyThe indi-cator function nabla checks if the nearest pixel is within distanceIn our experiments we set nabla = 2 These performance metricsare plotted against the number of superpixels in an image
According to Figure 8 we can find that the proposedalgorithm in this paper performs significantly better than
Journal of Sensors 9
ProposedERSTurbopixels
4000 5000 6000 7000 8000 90003000
Number of superpixels per image
005
01
015
02
025
03
035
04
Und
erse
gmen
tatio
n er
ror
(a)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
0
005
01
015
02
025
03
035
04
045
Und
erse
gmen
tatio
n er
ror
(b)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 90002000
Number of superpixels per image
06
065
07
075
08
085
09
095
1
Boun
dary
reca
ll
(c)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
05
06
07
08
09
1
11
12
Boun
dary
reca
ll
(d)
Figure 8 The comparison results of UE and BR (a) Undersegmentation error curves (b) undersegmentation error bar (c) boundary recallcurves (d) boundary recall error bar
the state of the art in all the metrics when the number ofsuperpixels is calculated by the proposed function
43 Building and Tree Classification Result To justify the useof Naive Bayes classifiers which is trained by the proposedalgorithm in our approach we tried the popular intersectionkernel and Chi-square kernel on our feature vector includingcolor FAST corner and Gabor feature for comparisonFigure 9 shows the building and tree classification results withzoom-in regions
44 Treersquos Parameters Estimation Result In our method wecalculated the tree parameters one by one Each tree withshadow was extracted from every segmentation image suchas Figure 7 and then this tree is matched with treemodel thatis presented in this paper The estimation result is shown inthe panel of the GUI when the tree is marked by using redcircular which is shown in Figure 10 After calculating theparameters all of the trees are covered by a round model
RMSE is introduced to evaluate the estimation results and thefunction is shown as follows
RMSE = radic 1
119871
119871
sum
119894=1
(
1003816100381610038161003816119901119894 minus 119901true1003816100381610038161003816
119901true)
2
(14)
where 119871 is the number of trees 119901119894is the estimated parameter
and 119901true is the ground truth of the parameters which aremanually measured It is noted that 119901
119894and 119901true are used to
describe the same tree in the image The RMSE of 119909119879 119910119879 119903119879
and ℎ119879is 1142 pixels 1381 pixels 1993 pixels and 5992 pix-
els respectively At the same time wemanually measured theparameters for 270 trees which are chosen from Figure 9(a)The height of the tree cannot be measured directly becausethe image is 2D However we can measure the parameters ofthe treersquos shadow by human so the height can be calculatedby (11) Therefore the treersquos height calculated by (11) couldbe considered as ground truth Then these ground truth
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 5: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/5.jpg)
Journal of Sensors 5
the gray-level feature or the edge-level feature [24] Accordingto Rigau et al [25] image complexity depended on theentropy of the image intensity histogram Therefore we usethe entropy to measure the image complexity The followingformula is used to calculate 120598
120598 = minussum119901119894log2
119901119894 (1)
where 119901119894is the probability value of 119894th gray This metric was
originally developed for automatic target recognition How-ever according to lots of experiments we suggest anothernovel use of this metric to choose the number of superpixelsusing the following formula
119873superpixel =120598 times119872
120601 times 100 (2)
where 119872 is the image size and 120601 is a weighted valueAccording to (2) we can find that the number of superpixelsis dependent on the image complexity and the image sizeThebigger 120598 is the more useful information is included in theaerial image Moreover the bigger119872 is the more objects arecontained in the aerial image Therefore 119873superpixel must bebigger whichmeans thatmore superpixels whose boundarieslie on edges between objects in the image are needed tosegment the images However in order to obtain a balancebetween the segmentation accuracy and computation apenalty weight 120601 is introduced in (2)
Testing different types of images which were collectedby our lab we suggest that the internal of 120601 is 6sim13 andin our experiment 120601 is 81 In order to balance under- andoversegmentation several parameters were introduced in (2)According to our research oversegmentation or underseg-mentation is caused by inappropriate numbers of superpixelsFurthermoremore details are included in the complex imageTherefore the entropy 120598 in (2) was introduced to calculatethe image complexity Besides a larger image includes moredetails than smaller one which means that more superpixelsare required for image segmentation Therefore the imagesize 119872 was introduced in (2) Finally the parameter 120601 wasintroduced to suppress the oversegmentation As shown inFigure 2 we can find that the trees buildings and otherobjects are covered by different superpixel patches eventhe trees are adjacent which makes it easy to segmentbuildings and trees From Figure 2 we can also find thatmost of the superpixels cover the pixels which belonged to thesame objects However some boundaries of the superpixelsare missed Therefore 119877edge is implemented to detect thesemissing boundaries in Section 312
312 Refined Superpixel In this paper we use a methodbased on Canny detector to overcome the undersegmenta-tion Canny [26] suggested that in an image edges wereusually defined as sets of points with a strong gradientmagnitude An edge can be of almost arbitrary shape andmay include junctions Therefore if the variance of pixels inthe same superpixel is bigger than the threshold the Cannydetector should be used to refine this superpixel Then thenew boundary of the superpixel could be found otherwisethis superpixel does not need to be refined
In this paper we propose a function 119877edge to determinewhich superpixels need to be refined The function is shownas follows
120590119894gt thr Detection
120590119894le thr No Detection
(3)
where 120590119894is the standard deviation of the 119894th superpixel and
thr is the threshold which is obtained by the experiment Inthis paper we suggest that thr is the threshold whose intervalis [9 19] that is calculated based on [27]
Simply defining thr to be the three-dimensional feature incolor space will cause inconsistencies in clustering behaviorfor different superpixel sizes This produces compact super-pixels that adhere well to image boundaries For smallersuperpixels the converse is true
32 Salient Features Extraction from Refined Superpixels Asuperpixel-based classifier is proposed for segmenting build-ings and trees from a presegmentation image In order totrain the classifier we assign building tree others label toeach superpixel to create the training data and then a salientfeature vector is derived from an entire superpixel In thispaper we extract the color feature corners and texturefeature for training the classifier
321 Color Features In our method 119877119866119861 and 119867119878119881 (huesaturation and value) are extracted to be as color featuresTheinput 119877119866119861 indices fill a color-cube which the 119867119878119881 hexconewas designed to perfectly fit [28] 119877119866119861 is a basic color spaceand it can be transformed to any color space including119867119878119881119884119880119881 At the same time 119867119878119881 is a more reasonable colorspace and it has a relationship with theHumanVision System(HVS) Therefore they were both important for training aclassifierThe following features calculated based on119877119866119861 and119867119878119881 are extracted from each superpixel
119877mean 119866mean 119861mean 119867mean 119878mean and 119881mean themeans of each channel of 119877119866119861 and119867119878119881119877std 119866std 119861std 119867std 119878std and 119881std the standarddeviation of each channel of 119877119866119861 and119867119878119881119877max 119866max 119861max 119867max 119878max and 119881max the value ofthe pixel with the greatest intensity in the superpixel119877min 119866min 119861min 119867min 119878min and 119881min the value of apixel with the lowest intensity in the superpixel
322 Robust FAST Corners Extraction Corner refers to asmall point of interest with variation in two dimensionsThere are many corner detectors which can be classified intotwo categories (1) Corner detector based on edges an edgein an image corresponds to the boundary between two areasand this boundary changes direction at corners Many earlyalgorithms detected corners based on the intensity changes(2) Corner detector based on chained edge lots of methodshave been developed which involved detecting and chainingedges with a view to analyzing the properties of the edgeRosten et al proposed a high-speed corner detectionmethodbased on FAST (Feature from Accelerated Segment Test) and
6 Journal of Sensors
machine learning [29] which is shownby (4)However FASTcorner is not robust because the threshold in (4) is a constantTherefore a novel function which is used to calculate thethreshold is proposed in this paper which is shown by (5)
119878119897
=
119889 119868119897le 119868119888119901minus 119879FAST-corner (darker)
119904 119868119888119901minus 119879FAST-corner le 119868119897 le 119868119888119901 + 119879FAST-corner (similar)
119897 119868119897ge 119868119888119901minus 119879FAST-corner (lighter)
(4)
where 119868119897is the gray values of candidate corners in a superpixel
119868119888119901is the gray values of neighbors around 119868
119897 and119879FAST-corner is
the FAST corner number which is calculated by the followingequation
119879FAST-corner =1198912
(119909119894 119910119894)
(1 (119872 times 119873))sum119872times119873
119894=0
119891 (119909119894 119910119894)
+ 120590 (5)
where120590 is the variance of an aerial image119891(119909 119910) and119891(119909119894 119910119894)
is the value of the 119894th pixel in the image 119891(119909 119910) According to(4) we can find that the bigger120590 is themore FAST corners areextracted from the superpixels because more salient cornersare in an image whose variance is bigger
323 Gabor Textures In our method we use the Gabor filterto extract structure features of buildings and trees Structureis an important feature to segment buildings from street andground and it is also useful to segment trees from grassFurthermore frequency and orientation representations ofGabor filters are similar to those of the Human VisualSystem (HVS) and they have been found to be particularlyappropriate for texture representation and discriminationAmong various approaches for extracting texture featuresGabor filter has emerged as one of the most popular ones[30] A Gabor descriptor of an image is computed by passingthe image through a filter bank of Gabor filter In the spatialdomain a 2D Gabor filter is a Gaussian kernel functionmodulated by a sinusoidal plane wave with a complexsinusoid [31] The function is shown as follows
119892 (119909 119910)
= (1
2120587120590119909120590119910
) exp[minus12(1199092
1205902119909
+1199102
1205902119910
) + 2120587119895Ω119909]
(6)
where Ω is the frequency of the Gabor function and 120590119909and
120590119910determine its bandwidthFrom the zoom-in region of Figure 2 we can find that
(1) buildings have similar color with the ground and streetsand (2) trees and grass have similar color These two char-acteristics make it difficult to segment buildings and treesfrom aerial images However the textures of buildings andtrees are muchmore obvious than ground and grass Besidesin order to balance the conflicting goals of reducing compu-tation while obtaining a satisfying accuracy the number offrequencies 120596 (120596
1= radic21205872 120596
2= radic21205873 120596
3= radic21205874 120596
4=
radic21205875 and 1205965= radic21205876) is 5 and number of orientations 120579
(1205791= 0 120579
2= 1205878 120579
3= 1205874 120579
4= 31205878 120579
5= 1205872 120579
6= 51205878
1205797= 31205874 and 120579
8= 71205878) is 8
Through concatenating the above features based on SVMa salient feature vector is generated for each superpixel Thenwe use this feature vector to train a classifier for building andtree segmentation Finally Naive Bayes classifier is chosen tobe used for tree and building classification in our algorithmbecause it is efficient and easy to be implemented [32]
33 Proposing a Cost Function for Tree Parameters EstimationAfter segmentation a tree location (119909
119879 119910119879) a tree radius
119903119879 and a tree height ℎ
119879are estimated by a cost function
integrating shadows
331 The Proposed Cost Function The tree model matchingis applied to 3 channels 119884 119880 and 119881 of the image 119868(119909 119910)The main advantage of the 119884119880119881model is that the luminanceand the color information are independent Therefore theluminance component can be processed without affecting thecolor contents [33] In order to match trees in 119868(119909 119910) withthe tree model119872(119909 119910) we propose a cost function which isshown as follows
cost = arg min (1199080+ 119908119884119865119884+ 119908119880119865119880+ 119908119881119865119881+ 119908119878119865119878) (7)
where 1199080 119908119884 119908119880 119908119881 and 119908
119878are the weights to control
the convergence speed of the cost function 119865119884 119865119880 and 119865
119881
are used to calculate the root of the square error (RSE) of119884 119880 and 119881 channel between 119868(119909 119910) and119872(119909 119910) within thetreersquos canopy and 119865
119878is used to calculate the RSE of shadows
in 119868(119909 119910) and119872(119909 119910) which is a circle These functions areshown as follows
119865119884(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119884(119909 119910) minus119872
119884(119909 119910)]
2
119865119880(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119880(119909 119910) minus119872
119880(119909 119910)]
2
119865119881(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119881(119909 119910) minus119872
119881(119909 119910)]
2
119865119878(119868119872) = 120596radic
sum
119909119910isin119862119878(119872)
[119868119878(119909 119910) minus119872
119878(119909 119910)]
2
(8)
where 120574 = 1119875 119875 is a weight and 119875 isin [0 1]
119862 (119872) = 119909 119910 | (119909 minus 1199090)2
+ (119910 minus 1199100)2
le 1199032
0
(9)
119862(119872) is supposed to be circular in our algorithm (1199090 1199100)
is the initializing center of the model 1199030is the initializing
radius and 120596 = 1119876 119876 is a weight and 119876 isin [0 1]
119862119878(119872) = 119909 119910 | (119909 minus 119909
119878)2
+ (119910 minus 119910119878)2
le 1199032
0
(10)
119862119878(119872) is also supposed to be a circle and its radius is
the same with the tree model (119909119878 119910119878) is dependent on the
centroid of the tree which is detected In Section 1 we showedthat there was a relationship between tree and its shadow
Journal of Sensors 7
Vertical
Horizontal
S
W
E
N Ground Tree shadow
h
Elevati
on
Azimuth (120572)
Figure 5 The relationship between tree and its shadow
which is shown in Figure 5 and this relationship can becalculated by using the following functions
119909119878= 1199090minus cosminus1120572 cotminus1120573ℎ
0
119910119878= 1199100minus sinminus1120572 cotminus1120573ℎ
0
(11)
where 120572 is the sun azimuth angle 120573 is the sun elevation angleand they could be calculated using the time when the imagewas taken ℎ
0is the tree height (119909
0 1199100) is the center of the
tree crown and (119909119878 119910119878) is the center of the shadow Here we
estimate the tree height ℎ using (11) and the cost function It isnoted that all these parameters are initialization parametersand the unit of the tree parameters is pixel because wecalculate them without additional information
332 The Outline of Calculating Treersquos Parameters In orderto calculate the treersquos parameter the gradient descent methodis employed to achieve iterations The convergence speed isrobust This procedure is shown in the following steps
Step 1 Calculate the gradient value 1198920by the initialization
parameter set int0= (119909
0 1199100) 1199030 ℎ0 where (119909
0 1199100) is the
centroid of a superpixel 1199030= 2 times 119909
0 and ℎ
0= 0
Step 2 Calculate the normvalue of1198920which can be expressed
as 1198921198990 where 119892
0= 5
Step 3 Update the int0using the formula int
1= int
0minus
oldspeed times 1198920
Step 4 Calculate the new gradient value 1198921using int
1
Step 5 Calculate the normvalue of1198921which can be expressed
as 1198921198991
Step 6 Calculate the ratio of 1198920and 1198921 rate119892can be obtained
Step 7 If rate119892gt 119879 newspeed = (rate
119892119871) times oldspeed else
newspeed = oldspeed where 119879 is a threshold 119871 is a constantand 119871 gt 1 and in our experiment 119871 = 100 In ourmethod theinitialization centroid (119909
0 1199100) is the centroid of a superpixel
that belonged to a tree The number of iterations is 600
This procedure is finished until getting the minimumvalue of tree parameters (119909lowast 119910lowast 119903lowast ℎlowast)
Our method was implemented using Microsoft VisualStudio 2010 and Matlab 2010a and this method was codedby integrating C and Matlab The proposed algorithm wastested on many large high-resolution urban images takenfrom Phoenix Arizona USA
4 Results
In our experiment the method is implemented by twosteps (1) the first step is presegmentation and the result iscompared with the result which is got by Turbopixel andEntropy Rate Superpixel (ERS) (2) the second is to segmentbuildings and trees and the segmentation result is comparedto the result got by using Turbopixel and ERS [34] (3) thetreersquos parameters estimation result is evaluated by the rootmean square error (RMSE)
41 Presegmentation Result Figure 2 is an original imagewhich includes trees grass buildings and other objects Thezoom-in area of Figure 2 shows that the tree color is similar tograss color the textures of trees are coarse and salient whilethe textures of grass are smooth Moreover the shapes of build-ings and trees are different Figure 6 shows the presegmenta-tion result By comparing Figures 6(a) 6(b) and 6(c) we canfind that the superpixel in Figure 6(a) was refined by ourmethod It is noted that the number of superpixels is 8200before the aerial images are presegmented by using Turbo-pixels
Figure 6(a) shows the result which is obtained by (3)Theboundaries are marked by red and the boundaries which aregot by (3) are marked by green
42 Segmentation Result Figure 7 shows four segmentationresults the first one is based on our method the second oneis based on the Turbopixels the third one is obtained by usingERS and the last one is ground truth segmentation result Bysubjectively comparing these three results we found that thesegmentation result got by our method is the best Because oftraining the features from the superpixels computation of ourmethod is less than that of the method used by ERS For thesuperpixel-level segmentation the computational complexityis 119874(120598 times 1198722
10
) However the computational complexity ofpixel-level is 119874(119872) 120598 is the image complexity and119872 is thepixel number Therefore the running time of our method isconsiderable which is very important in large scale urbanaerial image processing The average running time of ourmethod is 45 less than the average running time of ERS
Furthermore two standard metrics which were under-segmentation error [35] and boundary recall [36] were usedfor evaluating the quality of superpixels Undersegmentationerror (UE)measures fraction of pixel leak across ground truthboundaries which is shown by (12) The comparison resultsof UE were shown in Figure 8(a)
UET (119878) =sum119894
sum119896119878119896cap119879119894 =⊘
1003816100381610038161003816119878119896 minus 1198791198941003816100381610038161003816
sum119894
10038161003816100381610038161198661198941003816100381610038161003816
(12)
where T = 1198661 1198662 119866
119899 represent ground truth seg-
mentation and 119866119894denotes the segment size and 119878
119896is the 119896th
8 Journal of Sensors
(a) The result based on ourmethod
(b) The result based on Turbo-pixels
(c) The result based on ERS
Figure 6 The comparative presegmentation result
Original images Ground truthERSTurbopixelsProposed method
Figure 7 The comparative segmentation result
superpixel Boundary recall (BR) measures the percentage ofthe natural boundaries recovered by the superpixel bound-aries which is represented by (13) The comparison results ofBR were shown in Figure 8(b)
BRT (119878) =sum119901isin120575T nabla (min
119902isin120575119878
1003817100381710038171003817119901 minus 1199021003817100381710038171003817 lt 120598)
|120575119879| (13)
where 120575T and 120575119878 denote the union sets of ground truthboundaries and superpixel boundaries respectivelyThe indi-cator function nabla checks if the nearest pixel is within distanceIn our experiments we set nabla = 2 These performance metricsare plotted against the number of superpixels in an image
According to Figure 8 we can find that the proposedalgorithm in this paper performs significantly better than
Journal of Sensors 9
ProposedERSTurbopixels
4000 5000 6000 7000 8000 90003000
Number of superpixels per image
005
01
015
02
025
03
035
04
Und
erse
gmen
tatio
n er
ror
(a)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
0
005
01
015
02
025
03
035
04
045
Und
erse
gmen
tatio
n er
ror
(b)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 90002000
Number of superpixels per image
06
065
07
075
08
085
09
095
1
Boun
dary
reca
ll
(c)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
05
06
07
08
09
1
11
12
Boun
dary
reca
ll
(d)
Figure 8 The comparison results of UE and BR (a) Undersegmentation error curves (b) undersegmentation error bar (c) boundary recallcurves (d) boundary recall error bar
the state of the art in all the metrics when the number ofsuperpixels is calculated by the proposed function
43 Building and Tree Classification Result To justify the useof Naive Bayes classifiers which is trained by the proposedalgorithm in our approach we tried the popular intersectionkernel and Chi-square kernel on our feature vector includingcolor FAST corner and Gabor feature for comparisonFigure 9 shows the building and tree classification results withzoom-in regions
44 Treersquos Parameters Estimation Result In our method wecalculated the tree parameters one by one Each tree withshadow was extracted from every segmentation image suchas Figure 7 and then this tree is matched with treemodel thatis presented in this paper The estimation result is shown inthe panel of the GUI when the tree is marked by using redcircular which is shown in Figure 10 After calculating theparameters all of the trees are covered by a round model
RMSE is introduced to evaluate the estimation results and thefunction is shown as follows
RMSE = radic 1
119871
119871
sum
119894=1
(
1003816100381610038161003816119901119894 minus 119901true1003816100381610038161003816
119901true)
2
(14)
where 119871 is the number of trees 119901119894is the estimated parameter
and 119901true is the ground truth of the parameters which aremanually measured It is noted that 119901
119894and 119901true are used to
describe the same tree in the image The RMSE of 119909119879 119910119879 119903119879
and ℎ119879is 1142 pixels 1381 pixels 1993 pixels and 5992 pix-
els respectively At the same time wemanually measured theparameters for 270 trees which are chosen from Figure 9(a)The height of the tree cannot be measured directly becausethe image is 2D However we can measure the parameters ofthe treersquos shadow by human so the height can be calculatedby (11) Therefore the treersquos height calculated by (11) couldbe considered as ground truth Then these ground truth
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 6: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/6.jpg)
6 Journal of Sensors
machine learning [29] which is shownby (4)However FASTcorner is not robust because the threshold in (4) is a constantTherefore a novel function which is used to calculate thethreshold is proposed in this paper which is shown by (5)
119878119897
=
119889 119868119897le 119868119888119901minus 119879FAST-corner (darker)
119904 119868119888119901minus 119879FAST-corner le 119868119897 le 119868119888119901 + 119879FAST-corner (similar)
119897 119868119897ge 119868119888119901minus 119879FAST-corner (lighter)
(4)
where 119868119897is the gray values of candidate corners in a superpixel
119868119888119901is the gray values of neighbors around 119868
119897 and119879FAST-corner is
the FAST corner number which is calculated by the followingequation
119879FAST-corner =1198912
(119909119894 119910119894)
(1 (119872 times 119873))sum119872times119873
119894=0
119891 (119909119894 119910119894)
+ 120590 (5)
where120590 is the variance of an aerial image119891(119909 119910) and119891(119909119894 119910119894)
is the value of the 119894th pixel in the image 119891(119909 119910) According to(4) we can find that the bigger120590 is themore FAST corners areextracted from the superpixels because more salient cornersare in an image whose variance is bigger
323 Gabor Textures In our method we use the Gabor filterto extract structure features of buildings and trees Structureis an important feature to segment buildings from street andground and it is also useful to segment trees from grassFurthermore frequency and orientation representations ofGabor filters are similar to those of the Human VisualSystem (HVS) and they have been found to be particularlyappropriate for texture representation and discriminationAmong various approaches for extracting texture featuresGabor filter has emerged as one of the most popular ones[30] A Gabor descriptor of an image is computed by passingthe image through a filter bank of Gabor filter In the spatialdomain a 2D Gabor filter is a Gaussian kernel functionmodulated by a sinusoidal plane wave with a complexsinusoid [31] The function is shown as follows
119892 (119909 119910)
= (1
2120587120590119909120590119910
) exp[minus12(1199092
1205902119909
+1199102
1205902119910
) + 2120587119895Ω119909]
(6)
where Ω is the frequency of the Gabor function and 120590119909and
120590119910determine its bandwidthFrom the zoom-in region of Figure 2 we can find that
(1) buildings have similar color with the ground and streetsand (2) trees and grass have similar color These two char-acteristics make it difficult to segment buildings and treesfrom aerial images However the textures of buildings andtrees are muchmore obvious than ground and grass Besidesin order to balance the conflicting goals of reducing compu-tation while obtaining a satisfying accuracy the number offrequencies 120596 (120596
1= radic21205872 120596
2= radic21205873 120596
3= radic21205874 120596
4=
radic21205875 and 1205965= radic21205876) is 5 and number of orientations 120579
(1205791= 0 120579
2= 1205878 120579
3= 1205874 120579
4= 31205878 120579
5= 1205872 120579
6= 51205878
1205797= 31205874 and 120579
8= 71205878) is 8
Through concatenating the above features based on SVMa salient feature vector is generated for each superpixel Thenwe use this feature vector to train a classifier for building andtree segmentation Finally Naive Bayes classifier is chosen tobe used for tree and building classification in our algorithmbecause it is efficient and easy to be implemented [32]
33 Proposing a Cost Function for Tree Parameters EstimationAfter segmentation a tree location (119909
119879 119910119879) a tree radius
119903119879 and a tree height ℎ
119879are estimated by a cost function
integrating shadows
331 The Proposed Cost Function The tree model matchingis applied to 3 channels 119884 119880 and 119881 of the image 119868(119909 119910)The main advantage of the 119884119880119881model is that the luminanceand the color information are independent Therefore theluminance component can be processed without affecting thecolor contents [33] In order to match trees in 119868(119909 119910) withthe tree model119872(119909 119910) we propose a cost function which isshown as follows
cost = arg min (1199080+ 119908119884119865119884+ 119908119880119865119880+ 119908119881119865119881+ 119908119878119865119878) (7)
where 1199080 119908119884 119908119880 119908119881 and 119908
119878are the weights to control
the convergence speed of the cost function 119865119884 119865119880 and 119865
119881
are used to calculate the root of the square error (RSE) of119884 119880 and 119881 channel between 119868(119909 119910) and119872(119909 119910) within thetreersquos canopy and 119865
119878is used to calculate the RSE of shadows
in 119868(119909 119910) and119872(119909 119910) which is a circle These functions areshown as follows
119865119884(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119884(119909 119910) minus119872
119884(119909 119910)]
2
119865119880(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119880(119909 119910) minus119872
119880(119909 119910)]
2
119865119881(119868119872) = 120574radic
sum
119909119910isin119862(119872)
[119868119881(119909 119910) minus119872
119881(119909 119910)]
2
119865119878(119868119872) = 120596radic
sum
119909119910isin119862119878(119872)
[119868119878(119909 119910) minus119872
119878(119909 119910)]
2
(8)
where 120574 = 1119875 119875 is a weight and 119875 isin [0 1]
119862 (119872) = 119909 119910 | (119909 minus 1199090)2
+ (119910 minus 1199100)2
le 1199032
0
(9)
119862(119872) is supposed to be circular in our algorithm (1199090 1199100)
is the initializing center of the model 1199030is the initializing
radius and 120596 = 1119876 119876 is a weight and 119876 isin [0 1]
119862119878(119872) = 119909 119910 | (119909 minus 119909
119878)2
+ (119910 minus 119910119878)2
le 1199032
0
(10)
119862119878(119872) is also supposed to be a circle and its radius is
the same with the tree model (119909119878 119910119878) is dependent on the
centroid of the tree which is detected In Section 1 we showedthat there was a relationship between tree and its shadow
Journal of Sensors 7
Vertical
Horizontal
S
W
E
N Ground Tree shadow
h
Elevati
on
Azimuth (120572)
Figure 5 The relationship between tree and its shadow
which is shown in Figure 5 and this relationship can becalculated by using the following functions
119909119878= 1199090minus cosminus1120572 cotminus1120573ℎ
0
119910119878= 1199100minus sinminus1120572 cotminus1120573ℎ
0
(11)
where 120572 is the sun azimuth angle 120573 is the sun elevation angleand they could be calculated using the time when the imagewas taken ℎ
0is the tree height (119909
0 1199100) is the center of the
tree crown and (119909119878 119910119878) is the center of the shadow Here we
estimate the tree height ℎ using (11) and the cost function It isnoted that all these parameters are initialization parametersand the unit of the tree parameters is pixel because wecalculate them without additional information
332 The Outline of Calculating Treersquos Parameters In orderto calculate the treersquos parameter the gradient descent methodis employed to achieve iterations The convergence speed isrobust This procedure is shown in the following steps
Step 1 Calculate the gradient value 1198920by the initialization
parameter set int0= (119909
0 1199100) 1199030 ℎ0 where (119909
0 1199100) is the
centroid of a superpixel 1199030= 2 times 119909
0 and ℎ
0= 0
Step 2 Calculate the normvalue of1198920which can be expressed
as 1198921198990 where 119892
0= 5
Step 3 Update the int0using the formula int
1= int
0minus
oldspeed times 1198920
Step 4 Calculate the new gradient value 1198921using int
1
Step 5 Calculate the normvalue of1198921which can be expressed
as 1198921198991
Step 6 Calculate the ratio of 1198920and 1198921 rate119892can be obtained
Step 7 If rate119892gt 119879 newspeed = (rate
119892119871) times oldspeed else
newspeed = oldspeed where 119879 is a threshold 119871 is a constantand 119871 gt 1 and in our experiment 119871 = 100 In ourmethod theinitialization centroid (119909
0 1199100) is the centroid of a superpixel
that belonged to a tree The number of iterations is 600
This procedure is finished until getting the minimumvalue of tree parameters (119909lowast 119910lowast 119903lowast ℎlowast)
Our method was implemented using Microsoft VisualStudio 2010 and Matlab 2010a and this method was codedby integrating C and Matlab The proposed algorithm wastested on many large high-resolution urban images takenfrom Phoenix Arizona USA
4 Results
In our experiment the method is implemented by twosteps (1) the first step is presegmentation and the result iscompared with the result which is got by Turbopixel andEntropy Rate Superpixel (ERS) (2) the second is to segmentbuildings and trees and the segmentation result is comparedto the result got by using Turbopixel and ERS [34] (3) thetreersquos parameters estimation result is evaluated by the rootmean square error (RMSE)
41 Presegmentation Result Figure 2 is an original imagewhich includes trees grass buildings and other objects Thezoom-in area of Figure 2 shows that the tree color is similar tograss color the textures of trees are coarse and salient whilethe textures of grass are smooth Moreover the shapes of build-ings and trees are different Figure 6 shows the presegmenta-tion result By comparing Figures 6(a) 6(b) and 6(c) we canfind that the superpixel in Figure 6(a) was refined by ourmethod It is noted that the number of superpixels is 8200before the aerial images are presegmented by using Turbo-pixels
Figure 6(a) shows the result which is obtained by (3)Theboundaries are marked by red and the boundaries which aregot by (3) are marked by green
42 Segmentation Result Figure 7 shows four segmentationresults the first one is based on our method the second oneis based on the Turbopixels the third one is obtained by usingERS and the last one is ground truth segmentation result Bysubjectively comparing these three results we found that thesegmentation result got by our method is the best Because oftraining the features from the superpixels computation of ourmethod is less than that of the method used by ERS For thesuperpixel-level segmentation the computational complexityis 119874(120598 times 1198722
10
) However the computational complexity ofpixel-level is 119874(119872) 120598 is the image complexity and119872 is thepixel number Therefore the running time of our method isconsiderable which is very important in large scale urbanaerial image processing The average running time of ourmethod is 45 less than the average running time of ERS
Furthermore two standard metrics which were under-segmentation error [35] and boundary recall [36] were usedfor evaluating the quality of superpixels Undersegmentationerror (UE)measures fraction of pixel leak across ground truthboundaries which is shown by (12) The comparison resultsof UE were shown in Figure 8(a)
UET (119878) =sum119894
sum119896119878119896cap119879119894 =⊘
1003816100381610038161003816119878119896 minus 1198791198941003816100381610038161003816
sum119894
10038161003816100381610038161198661198941003816100381610038161003816
(12)
where T = 1198661 1198662 119866
119899 represent ground truth seg-
mentation and 119866119894denotes the segment size and 119878
119896is the 119896th
8 Journal of Sensors
(a) The result based on ourmethod
(b) The result based on Turbo-pixels
(c) The result based on ERS
Figure 6 The comparative presegmentation result
Original images Ground truthERSTurbopixelsProposed method
Figure 7 The comparative segmentation result
superpixel Boundary recall (BR) measures the percentage ofthe natural boundaries recovered by the superpixel bound-aries which is represented by (13) The comparison results ofBR were shown in Figure 8(b)
BRT (119878) =sum119901isin120575T nabla (min
119902isin120575119878
1003817100381710038171003817119901 minus 1199021003817100381710038171003817 lt 120598)
|120575119879| (13)
where 120575T and 120575119878 denote the union sets of ground truthboundaries and superpixel boundaries respectivelyThe indi-cator function nabla checks if the nearest pixel is within distanceIn our experiments we set nabla = 2 These performance metricsare plotted against the number of superpixels in an image
According to Figure 8 we can find that the proposedalgorithm in this paper performs significantly better than
Journal of Sensors 9
ProposedERSTurbopixels
4000 5000 6000 7000 8000 90003000
Number of superpixels per image
005
01
015
02
025
03
035
04
Und
erse
gmen
tatio
n er
ror
(a)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
0
005
01
015
02
025
03
035
04
045
Und
erse
gmen
tatio
n er
ror
(b)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 90002000
Number of superpixels per image
06
065
07
075
08
085
09
095
1
Boun
dary
reca
ll
(c)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
05
06
07
08
09
1
11
12
Boun
dary
reca
ll
(d)
Figure 8 The comparison results of UE and BR (a) Undersegmentation error curves (b) undersegmentation error bar (c) boundary recallcurves (d) boundary recall error bar
the state of the art in all the metrics when the number ofsuperpixels is calculated by the proposed function
43 Building and Tree Classification Result To justify the useof Naive Bayes classifiers which is trained by the proposedalgorithm in our approach we tried the popular intersectionkernel and Chi-square kernel on our feature vector includingcolor FAST corner and Gabor feature for comparisonFigure 9 shows the building and tree classification results withzoom-in regions
44 Treersquos Parameters Estimation Result In our method wecalculated the tree parameters one by one Each tree withshadow was extracted from every segmentation image suchas Figure 7 and then this tree is matched with treemodel thatis presented in this paper The estimation result is shown inthe panel of the GUI when the tree is marked by using redcircular which is shown in Figure 10 After calculating theparameters all of the trees are covered by a round model
RMSE is introduced to evaluate the estimation results and thefunction is shown as follows
RMSE = radic 1
119871
119871
sum
119894=1
(
1003816100381610038161003816119901119894 minus 119901true1003816100381610038161003816
119901true)
2
(14)
where 119871 is the number of trees 119901119894is the estimated parameter
and 119901true is the ground truth of the parameters which aremanually measured It is noted that 119901
119894and 119901true are used to
describe the same tree in the image The RMSE of 119909119879 119910119879 119903119879
and ℎ119879is 1142 pixels 1381 pixels 1993 pixels and 5992 pix-
els respectively At the same time wemanually measured theparameters for 270 trees which are chosen from Figure 9(a)The height of the tree cannot be measured directly becausethe image is 2D However we can measure the parameters ofthe treersquos shadow by human so the height can be calculatedby (11) Therefore the treersquos height calculated by (11) couldbe considered as ground truth Then these ground truth
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 7: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/7.jpg)
Journal of Sensors 7
Vertical
Horizontal
S
W
E
N Ground Tree shadow
h
Elevati
on
Azimuth (120572)
Figure 5 The relationship between tree and its shadow
which is shown in Figure 5 and this relationship can becalculated by using the following functions
119909119878= 1199090minus cosminus1120572 cotminus1120573ℎ
0
119910119878= 1199100minus sinminus1120572 cotminus1120573ℎ
0
(11)
where 120572 is the sun azimuth angle 120573 is the sun elevation angleand they could be calculated using the time when the imagewas taken ℎ
0is the tree height (119909
0 1199100) is the center of the
tree crown and (119909119878 119910119878) is the center of the shadow Here we
estimate the tree height ℎ using (11) and the cost function It isnoted that all these parameters are initialization parametersand the unit of the tree parameters is pixel because wecalculate them without additional information
332 The Outline of Calculating Treersquos Parameters In orderto calculate the treersquos parameter the gradient descent methodis employed to achieve iterations The convergence speed isrobust This procedure is shown in the following steps
Step 1 Calculate the gradient value 1198920by the initialization
parameter set int0= (119909
0 1199100) 1199030 ℎ0 where (119909
0 1199100) is the
centroid of a superpixel 1199030= 2 times 119909
0 and ℎ
0= 0
Step 2 Calculate the normvalue of1198920which can be expressed
as 1198921198990 where 119892
0= 5
Step 3 Update the int0using the formula int
1= int
0minus
oldspeed times 1198920
Step 4 Calculate the new gradient value 1198921using int
1
Step 5 Calculate the normvalue of1198921which can be expressed
as 1198921198991
Step 6 Calculate the ratio of 1198920and 1198921 rate119892can be obtained
Step 7 If rate119892gt 119879 newspeed = (rate
119892119871) times oldspeed else
newspeed = oldspeed where 119879 is a threshold 119871 is a constantand 119871 gt 1 and in our experiment 119871 = 100 In ourmethod theinitialization centroid (119909
0 1199100) is the centroid of a superpixel
that belonged to a tree The number of iterations is 600
This procedure is finished until getting the minimumvalue of tree parameters (119909lowast 119910lowast 119903lowast ℎlowast)
Our method was implemented using Microsoft VisualStudio 2010 and Matlab 2010a and this method was codedby integrating C and Matlab The proposed algorithm wastested on many large high-resolution urban images takenfrom Phoenix Arizona USA
4 Results
In our experiment the method is implemented by twosteps (1) the first step is presegmentation and the result iscompared with the result which is got by Turbopixel andEntropy Rate Superpixel (ERS) (2) the second is to segmentbuildings and trees and the segmentation result is comparedto the result got by using Turbopixel and ERS [34] (3) thetreersquos parameters estimation result is evaluated by the rootmean square error (RMSE)
41 Presegmentation Result Figure 2 is an original imagewhich includes trees grass buildings and other objects Thezoom-in area of Figure 2 shows that the tree color is similar tograss color the textures of trees are coarse and salient whilethe textures of grass are smooth Moreover the shapes of build-ings and trees are different Figure 6 shows the presegmenta-tion result By comparing Figures 6(a) 6(b) and 6(c) we canfind that the superpixel in Figure 6(a) was refined by ourmethod It is noted that the number of superpixels is 8200before the aerial images are presegmented by using Turbo-pixels
Figure 6(a) shows the result which is obtained by (3)Theboundaries are marked by red and the boundaries which aregot by (3) are marked by green
42 Segmentation Result Figure 7 shows four segmentationresults the first one is based on our method the second oneis based on the Turbopixels the third one is obtained by usingERS and the last one is ground truth segmentation result Bysubjectively comparing these three results we found that thesegmentation result got by our method is the best Because oftraining the features from the superpixels computation of ourmethod is less than that of the method used by ERS For thesuperpixel-level segmentation the computational complexityis 119874(120598 times 1198722
10
) However the computational complexity ofpixel-level is 119874(119872) 120598 is the image complexity and119872 is thepixel number Therefore the running time of our method isconsiderable which is very important in large scale urbanaerial image processing The average running time of ourmethod is 45 less than the average running time of ERS
Furthermore two standard metrics which were under-segmentation error [35] and boundary recall [36] were usedfor evaluating the quality of superpixels Undersegmentationerror (UE)measures fraction of pixel leak across ground truthboundaries which is shown by (12) The comparison resultsof UE were shown in Figure 8(a)
UET (119878) =sum119894
sum119896119878119896cap119879119894 =⊘
1003816100381610038161003816119878119896 minus 1198791198941003816100381610038161003816
sum119894
10038161003816100381610038161198661198941003816100381610038161003816
(12)
where T = 1198661 1198662 119866
119899 represent ground truth seg-
mentation and 119866119894denotes the segment size and 119878
119896is the 119896th
8 Journal of Sensors
(a) The result based on ourmethod
(b) The result based on Turbo-pixels
(c) The result based on ERS
Figure 6 The comparative presegmentation result
Original images Ground truthERSTurbopixelsProposed method
Figure 7 The comparative segmentation result
superpixel Boundary recall (BR) measures the percentage ofthe natural boundaries recovered by the superpixel bound-aries which is represented by (13) The comparison results ofBR were shown in Figure 8(b)
BRT (119878) =sum119901isin120575T nabla (min
119902isin120575119878
1003817100381710038171003817119901 minus 1199021003817100381710038171003817 lt 120598)
|120575119879| (13)
where 120575T and 120575119878 denote the union sets of ground truthboundaries and superpixel boundaries respectivelyThe indi-cator function nabla checks if the nearest pixel is within distanceIn our experiments we set nabla = 2 These performance metricsare plotted against the number of superpixels in an image
According to Figure 8 we can find that the proposedalgorithm in this paper performs significantly better than
Journal of Sensors 9
ProposedERSTurbopixels
4000 5000 6000 7000 8000 90003000
Number of superpixels per image
005
01
015
02
025
03
035
04
Und
erse
gmen
tatio
n er
ror
(a)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
0
005
01
015
02
025
03
035
04
045
Und
erse
gmen
tatio
n er
ror
(b)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 90002000
Number of superpixels per image
06
065
07
075
08
085
09
095
1
Boun
dary
reca
ll
(c)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
05
06
07
08
09
1
11
12
Boun
dary
reca
ll
(d)
Figure 8 The comparison results of UE and BR (a) Undersegmentation error curves (b) undersegmentation error bar (c) boundary recallcurves (d) boundary recall error bar
the state of the art in all the metrics when the number ofsuperpixels is calculated by the proposed function
43 Building and Tree Classification Result To justify the useof Naive Bayes classifiers which is trained by the proposedalgorithm in our approach we tried the popular intersectionkernel and Chi-square kernel on our feature vector includingcolor FAST corner and Gabor feature for comparisonFigure 9 shows the building and tree classification results withzoom-in regions
44 Treersquos Parameters Estimation Result In our method wecalculated the tree parameters one by one Each tree withshadow was extracted from every segmentation image suchas Figure 7 and then this tree is matched with treemodel thatis presented in this paper The estimation result is shown inthe panel of the GUI when the tree is marked by using redcircular which is shown in Figure 10 After calculating theparameters all of the trees are covered by a round model
RMSE is introduced to evaluate the estimation results and thefunction is shown as follows
RMSE = radic 1
119871
119871
sum
119894=1
(
1003816100381610038161003816119901119894 minus 119901true1003816100381610038161003816
119901true)
2
(14)
where 119871 is the number of trees 119901119894is the estimated parameter
and 119901true is the ground truth of the parameters which aremanually measured It is noted that 119901
119894and 119901true are used to
describe the same tree in the image The RMSE of 119909119879 119910119879 119903119879
and ℎ119879is 1142 pixels 1381 pixels 1993 pixels and 5992 pix-
els respectively At the same time wemanually measured theparameters for 270 trees which are chosen from Figure 9(a)The height of the tree cannot be measured directly becausethe image is 2D However we can measure the parameters ofthe treersquos shadow by human so the height can be calculatedby (11) Therefore the treersquos height calculated by (11) couldbe considered as ground truth Then these ground truth
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 8: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/8.jpg)
8 Journal of Sensors
(a) The result based on ourmethod
(b) The result based on Turbo-pixels
(c) The result based on ERS
Figure 6 The comparative presegmentation result
Original images Ground truthERSTurbopixelsProposed method
Figure 7 The comparative segmentation result
superpixel Boundary recall (BR) measures the percentage ofthe natural boundaries recovered by the superpixel bound-aries which is represented by (13) The comparison results ofBR were shown in Figure 8(b)
BRT (119878) =sum119901isin120575T nabla (min
119902isin120575119878
1003817100381710038171003817119901 minus 1199021003817100381710038171003817 lt 120598)
|120575119879| (13)
where 120575T and 120575119878 denote the union sets of ground truthboundaries and superpixel boundaries respectivelyThe indi-cator function nabla checks if the nearest pixel is within distanceIn our experiments we set nabla = 2 These performance metricsare plotted against the number of superpixels in an image
According to Figure 8 we can find that the proposedalgorithm in this paper performs significantly better than
Journal of Sensors 9
ProposedERSTurbopixels
4000 5000 6000 7000 8000 90003000
Number of superpixels per image
005
01
015
02
025
03
035
04
Und
erse
gmen
tatio
n er
ror
(a)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
0
005
01
015
02
025
03
035
04
045
Und
erse
gmen
tatio
n er
ror
(b)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 90002000
Number of superpixels per image
06
065
07
075
08
085
09
095
1
Boun
dary
reca
ll
(c)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
05
06
07
08
09
1
11
12
Boun
dary
reca
ll
(d)
Figure 8 The comparison results of UE and BR (a) Undersegmentation error curves (b) undersegmentation error bar (c) boundary recallcurves (d) boundary recall error bar
the state of the art in all the metrics when the number ofsuperpixels is calculated by the proposed function
43 Building and Tree Classification Result To justify the useof Naive Bayes classifiers which is trained by the proposedalgorithm in our approach we tried the popular intersectionkernel and Chi-square kernel on our feature vector includingcolor FAST corner and Gabor feature for comparisonFigure 9 shows the building and tree classification results withzoom-in regions
44 Treersquos Parameters Estimation Result In our method wecalculated the tree parameters one by one Each tree withshadow was extracted from every segmentation image suchas Figure 7 and then this tree is matched with treemodel thatis presented in this paper The estimation result is shown inthe panel of the GUI when the tree is marked by using redcircular which is shown in Figure 10 After calculating theparameters all of the trees are covered by a round model
RMSE is introduced to evaluate the estimation results and thefunction is shown as follows
RMSE = radic 1
119871
119871
sum
119894=1
(
1003816100381610038161003816119901119894 minus 119901true1003816100381610038161003816
119901true)
2
(14)
where 119871 is the number of trees 119901119894is the estimated parameter
and 119901true is the ground truth of the parameters which aremanually measured It is noted that 119901
119894and 119901true are used to
describe the same tree in the image The RMSE of 119909119879 119910119879 119903119879
and ℎ119879is 1142 pixels 1381 pixels 1993 pixels and 5992 pix-
els respectively At the same time wemanually measured theparameters for 270 trees which are chosen from Figure 9(a)The height of the tree cannot be measured directly becausethe image is 2D However we can measure the parameters ofthe treersquos shadow by human so the height can be calculatedby (11) Therefore the treersquos height calculated by (11) couldbe considered as ground truth Then these ground truth
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 9: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/9.jpg)
Journal of Sensors 9
ProposedERSTurbopixels
4000 5000 6000 7000 8000 90003000
Number of superpixels per image
005
01
015
02
025
03
035
04
Und
erse
gmen
tatio
n er
ror
(a)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
0
005
01
015
02
025
03
035
04
045
Und
erse
gmen
tatio
n er
ror
(b)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 90002000
Number of superpixels per image
06
065
07
075
08
085
09
095
1
Boun
dary
reca
ll
(c)
ProposedERSTurbopixels
3000 4000 5000 6000 7000 8000 9000 100002000
Number of superpixels per image
05
06
07
08
09
1
11
12
Boun
dary
reca
ll
(d)
Figure 8 The comparison results of UE and BR (a) Undersegmentation error curves (b) undersegmentation error bar (c) boundary recallcurves (d) boundary recall error bar
the state of the art in all the metrics when the number ofsuperpixels is calculated by the proposed function
43 Building and Tree Classification Result To justify the useof Naive Bayes classifiers which is trained by the proposedalgorithm in our approach we tried the popular intersectionkernel and Chi-square kernel on our feature vector includingcolor FAST corner and Gabor feature for comparisonFigure 9 shows the building and tree classification results withzoom-in regions
44 Treersquos Parameters Estimation Result In our method wecalculated the tree parameters one by one Each tree withshadow was extracted from every segmentation image suchas Figure 7 and then this tree is matched with treemodel thatis presented in this paper The estimation result is shown inthe panel of the GUI when the tree is marked by using redcircular which is shown in Figure 10 After calculating theparameters all of the trees are covered by a round model
RMSE is introduced to evaluate the estimation results and thefunction is shown as follows
RMSE = radic 1
119871
119871
sum
119894=1
(
1003816100381610038161003816119901119894 minus 119901true1003816100381610038161003816
119901true)
2
(14)
where 119871 is the number of trees 119901119894is the estimated parameter
and 119901true is the ground truth of the parameters which aremanually measured It is noted that 119901
119894and 119901true are used to
describe the same tree in the image The RMSE of 119909119879 119910119879 119903119879
and ℎ119879is 1142 pixels 1381 pixels 1993 pixels and 5992 pix-
els respectively At the same time wemanually measured theparameters for 270 trees which are chosen from Figure 9(a)The height of the tree cannot be measured directly becausethe image is 2D However we can measure the parameters ofthe treersquos shadow by human so the height can be calculatedby (11) Therefore the treersquos height calculated by (11) couldbe considered as ground truth Then these ground truth
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 10: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/10.jpg)
10 Journal of Sensors
BuildingTreeOthers
(a)
BuildingTreeOthers
(b)
BuildingTreeOthers
(c)
Figure 9 The visual comparison of building and tree classification result (a) Classification result by our proposed method (b) theclassification based on intersection kernel (c) the classification result based on Chi-square kernel
Figure 10 The segmentation result which is shown by GUI
parameters are compared with the parameters obtained byusing the proposed cost function (7) The result is shown inFigure 11
5 Discussion
In this paper we proposed a novel method for building andtree segmentation from large scale urban aerial images andwe also proposed a new approach for estimating tree param-eters In Section 42 we compared our segmentation methodwith the method proposed by Levinshtein et al [14] FromFigure 6 it is shown that our approach of superpixel can besegmented alongwith the edge of objects while themethodofLevinshtein and his colleague segmented several objects intoone superpixel We also compare our segmentation resultswith the pixel-level segmentation approach using ERS InFigures 9(a) and 9(c) the results indicate that our methodcan not only detect smaller building objects but also hasless false alarm detection of building objects on the streetIn our paper the superpixel code is programmed by MatlabcodeTherefore the time complexity is a little high Howeverwe are doing the work of installing this algorithm by Cwhich is used to reduce the run-time and easy to be used incommercial areas
In Section 44 we presented a novel approach of calculat-ing tree parameters such as locations radiuses and heightsdepending on a single aerial image without additional infor-mation Our method needs less data than existing methods[9 37 38] that used additional information from LiDARdata and another database Based on our novel segmentationmethod and the high-resolution aerial photographs our treeparameters can be estimated with high accuracy since (a)the edges of neighbor trees can be detected more preciselybecause our segmentationmethod can separate adjacent treesusing different superpixels (b) the edges of shadow of treesare clearer and easier for segmentation in the high-resolutionaerial images (c) the time information for calculating heightsby shadows of trees can be obtained from EXIF info inaerial photographs However our approach is implementedwith two restrictions The first restriction is that the color ofbuilding roof cannot be the same as the color of ground Thesecond restriction is that the distance between trees cannotbe too close or the nearby tree cannot be separated and willbe considered as the same one
In Section 1(A) we showed many existing segmentationalgorithms in aerial urban image processing using the pixel-level as the underlying representation However the pixel-level representation is not a natural representation of visualscenes Each pixel cannot represent the geometric structureproperty of an object while the superpixel is perceptuallymeaningful and each superpixel is a perceptually consistentunit [23] The comparison of Figures 9(a) 9(b) and 9(c)shows that the pixel-level segmentation misses some edges ofthe buildings while the superpixel-level segmentation keepsthe edges Furthermore superpixel image has low compu-tation cost and reduces the complexity of high-resolutionaerial images Therefore many researchers introduced thesuperpixels for the image segmentation For example Saxenaet al [39] used the superpixel to segment objects duringmodeling 3D scene structure from a single stationary imageKluckner et al [40] used the superpixels to segment thelarge scale aerial images and the conditional random field(CRF) was used to refine the result The presented approachof segmenting tree stems goes one step further than existing
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 11: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/11.jpg)
Journal of Sensors 11
Estimated XGround truth X
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
X (p
ixel
)
(a)
Estimated YGround truth Y
0 50 200100 300250150
Tree numbers
0
1000
2000
3000
4000
5000
6000
7000
8000
Tree
cent
er in
Y (p
ixel
)
(b)
Estimated radiusGround truth radius
0 50 200100 300250150
Tree numbers
8
10
12
14
16
18
20
Tree
radi
us (p
ixel
)
(c)
Estimated heightGround truth height
0 50 200100 300250150
Tree numbers
5
15
10
20
25
30
35Tr
ee h
eigh
t (pi
xel)
(d)
Figure 11 The comparing result (a)The centers of trees in horizontal direction (b) the centers of trees in vertical direction (c) the radiuses(d) the height
methods by using additional information between the super-pixels Most of missing edges of superpixels are detected
Tree model is widely used to detect trees Morsdorf et al[41] used the local maxima of canopy height model (CHM)to calculate the tree height using airborne laser scanning rawdata The method from Vastaranta et al [42] used a rasterCHM which was created from normalized data to detectthe individual tree Apparently LiDAR data information isneeded for detecting trees However our proposed methodjust detects the single tree from the aerial image withoutany additional complex information The experiments showthat the parameters of the trees can be calculated from asingle high-resolution aerial image In order to calculate theparameters of the trees we use shadows tree crowns and thetime of taking aerial image as input data and estimate theheight of a tree based on (11)
Finally the experiments show that the locations and radi-uses of the trees estimated by our approach are approximate
to the manual-picking methods However there are someheights of trees higher or lower than the ground truth onesshown at Figure 11(d) It might be because the shapes of thetree are irregularThis problem could be solved if we considera new tree model which is more complex than the modelproposed in this paper
6 Conclusion
In this paper we proposed a building and tree detectionalgorithm by using improved superpixels from large high-resolution urban images and we also proposed a method tocalculate the tree parameters depending upon a cost functionand shadows A function was proposed to automaticallycalculate the number of superpixels and a function is usedto refine the boundaries of superpixels We provided a newtree model with a cost function that can be minimized usinggradient decent in order to identify the optimal properties
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 12: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/12.jpg)
12 Journal of Sensors
of individual tree We evaluated our method by using manyaerial images and compared ourmethodwith other two state-of-the-art methods Experiments showed that our methodis fast and robust while still being simple and efficientand they also indicate that the shadow is a good featureto estimate the tree height The results of our method canbe implemented for generating 3D urban models The mainpurpose of this paper is to design fast accurate segmentationand classification characteristics not focused on the learningprocess However we will examine the different supervisedlearning algorithms in the future research work improvingthe effectiveness of the proposed algorithm Future work willfocus on comparing our method with other supervised algo-rithms including methods of integrating these data sourcesinto our solution
Parameters used in the rule sets are sample values specif-ically for the study area we chose and may vary for otherlocations of interest but the similar principles and procedurescan be applied to other areas Using additional ancillarydata such as 1-meter resolution LiDAR (Light Detection andRanging) may further help generate more accurate land-cover maps which is among our planned future work
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This project is sponsored by the The National High Tech-nology Research and Development Program of China (no2014AA123103 and no 2015AA124103) and National NaturalScience Foundation of China (no 61401040)
References
[1] A Huertas and R Nevatia ldquoDetecting buildings in aerialimagesrdquo Computer Vision Graphics and Image Processing vol41 no 2 pp 131ndash152 1988
[2] Y-T Liow and T Pavlidis ldquoUse of shadows for extracting build-ings in aerial imagesrdquo Computer Vision Graphics and ImageProcessing vol 49 no 2 pp 242ndash277 1990
[3] F Rottensteiner and C Briese ldquoA new method for buildingextraction in urban areas fromhigh-resolution lidar datardquo Inter-national Archives of Photogrammetry Remote Sensing and Spa-tial Information Sciences vol 34 pp 295ndash301 2002
[4] F Rottensteiner J Trinder S Clode and K Kubik ldquoBuildingdetection using lidar data andmultispectral imagesrdquo in Proceed-ings of the 7thDigital Image Computing Techniques andApplica-tions C Sun H Talbot S Ourselin and T Adriaansen Edsvol 2 pp 673ndash682 Sydney Australia December 2011
[5] L Cheng L Tong Y Chen et al ldquoIntegration of LiDAR dataand opticalmulti-view images for 3D reconstruction of buildingroofsrdquo Optics and Lasers in Engineering vol 51 no 4 pp 493ndash502 2013
[6] Y El Merabet C Meurie Y Ruichek A Sbihi and R TouahnildquoBuilding roof segmentation from aerial images using a lineandregion-based watershed segmentation techniquerdquo Sensors vol15 no 2 pp 3172ndash3203 2015
[7] C Iovan D Boldo and M Cord ldquoDetection characterizationand modeling vegetation in urban areas from high-resolutionaerial imageryrdquo IEEE Journal of Selected Topics in Applied EarthObservations and Remote Sensing vol 1 no 3 pp 206ndash2132008
[8] L Yang and XWu ldquoTree detection from aerial imageryrdquo in Pro-ceedings of the 17th ACM SIGSPATIAL International Conferenceon Advances in Geographic Information Systems (GIS rsquo09) pp131ndash137 Seattle Wash USA November 2009
[9] G Chen and A Zakhor ldquo2D tree detection in large urban land-scapes using aerial lidar datardquo in Proceedings of the IEEE Inter-national Conference on Image Processing (ICIP rsquo09) pp 1693ndash1696 Cairo Egypt November 2009
[10] A Brook and E Ben-Dor ldquoQuantitative detection of sedimentdust analog over green canopy using airborne hyperspectralimageryrdquo in Proceedings of the 2nd Workshop on Hyperspec-tral Image and Signal Processing Evolution in Remote Sensing(WHISPERS rsquo10) pp 1ndash5 IEEE Reykjavik Iceland June 2010
[11] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms 10th International Conference ICANNGA 2011Ljubljana Slovenia April 14ndash16 2011 Proceedings Part II vol6594 of Lecture Notes in Computer Science pp 51ndash60 SpringerBerlin Germany 2011
[12] T L Swetnam and D A Falk ldquoApplication of metabolic scalingtheory to reduce error in local maxima tree segmentation fromaerial LiDARrdquo Forest Ecology and Management vol 323 pp158ndash167 2014
[13] HHuang P Gong X Cheng N Clinton and Z Li ldquoImprovingmeasurement of forest structural parameters by coregisteringof high resolution aerial imagery and low density lidar datardquoSensors vol 9 no 3 pp 1541ndash1558 2009
[14] A Levinshtein A Stere K N Kutulakos D J Fleet S J Dick-inson and K Siddiqi ldquoTurboPixels fast superpixels using geo-metric flowsrdquo IEEE Transactions on Pattern Analysis andMachine Intelligence vol 31 no 12 pp 2290ndash2297 2009
[15] D Engel L Spinello R Triebel R Siegwart H H Bulthoffand C Curio ldquoMedial features for superpixel segmentationrdquoin Proceedings of the 11th IAPR Conference on Machine VisionApplications (MVA rsquo09) pp 248ndash252 Yokohama Japan May2009
[16] S Kluckner and H Bischof ldquoImage-based building classifica-tion and 3d modeling with super-pixelsrdquo in Proceedings of theISPRS Technical Commission 3rd Symposium on Photogramme-try Computer Vision and Image Analysis pp 233ndash238 ParisFrance September 2010
[17] L Itti C Koch and E Niebur ldquoAmodel of saliency-based visualattention for rapid scene analysisrdquo IEEE Transactions on PatternAnalysis and Machine Intelligence vol 20 no 11 pp 1254ndash12591998
[18] T Kadir A Zisserman and M Brady ldquoAn affine invariantsalient region detectorrdquo in Computer VisionmdashECCV 2004 vol3021 ofLectureNotes inComputer Science pp 228ndash241 SpringerBerlin Germany 2004
[19] D AHahn GWolz Y Sun et al ldquoA practical salient region fea-ture based 3D multi-modality registration method for medicalimagesrdquo inProceedings of theMedical Imaging Image Processingvol 6144 of Proceedings of SPIE p 61442P San Diego CalifUSA March 2006
[20] S Kicherer J A Malpica andM C Alonso ldquoAn interactive tech-nique for cartographic feature extraction from aerial and satel-lite image sensorsrdquo Sensors vol 8 no 8 pp 4786ndash4799 2008
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 13: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/13.jpg)
Journal of Sensors 13
[21] F Bi F Liu and L Gao ldquoA hierarchical salient-region basedalgorithm for ship detection in remote sensing imagesrdquo inAdvances in Neural Network Research and Applications vol 67of Lecture Notes in Electrical Engineering pp 729ndash738 SpringerBerlin Germany 2010
[22] V CasellaaM Franzinia G Banchinib andG Gentilib ldquoInitialevaluation of the secondgeneration leica ADS40 camerardquo inTheInternational Archives of the Photogrammetry Remote Sensingand Spatial Information Sciences pp 527ndash532 PostgraduateMedicine Beijing China 2008
[23] X Ren and J Malik ldquoThe ecological statistics of good continua-tionmulti-scalemarkovmodels for contoursrdquo Journal of Visionvol 2 no 7 article 708 2002
[24] R A Peters and R N Strickland ldquoImage complexitymetrics forautomatic target recognizersrdquo in Proceedings of the AutomaticTarget Recognizer System and Technology Conference pp 1ndash171990
[25] J Rigau M Feixas and M Sbert ldquoAn information-theoreticframework for image complexityrdquo in Proceedings of the 1stEurographics Conference on Computational Aesthetics in Graph-ics Visualization and Imaging Computational Aesthetics LNeumann M Sbert B Gooch and W Purgathofer Eds pp177ndash184 Eurographics Association Aire-la-Ville 2005
[26] J Canny ldquoA computational approach to edge detectionrdquo IEEETransactions on Pattern Analysis and Machine Intelligence vol8 no 6 pp 679ndash698 1986
[27] V M Nazareth K Amulya and K Manikantan ldquoOptimal mul-tilevel thresholding for image segmentation using contrast-limited adaptive histogram equalization and enhanced conver-gence particle swarm optimizationrdquo in Proceedings of the 3rdNational Conference on Computer Vision Pattern RecognitionImage Processing and Graphics (NCVPRIPG rsquo11) pp 207ndash210Hubli India December 2011
[28] J C Femiani and A Razdan ldquoInterval HSV extracting inkannotationsrdquo in Proceedings of the IEEE Conference on Com-puter Vision and Pattern Recognition (CVPR rsquo09) pp 2520ndash2527Miami Fla USA June 2009
[29] E Rosten R Porter and T Drummond ldquoFaster and better amachine learning approach to corner detectionrdquo IEEE Transac-tions on Pattern Analysis and Machine Intelligence vol 32 no 1pp 105ndash119 2010
[30] W Li K Z Mao H Zhang and T Chai ldquoSelection of gaborfilters for improved texture feature extractionrdquo in Proceedingsof the 17th IEEE International Conference on Image Processing(ICIP rsquo10) pp 361ndash364 IEEE Hong Kong September 2010
[31] V Risojevic S Momic and Z Babic ldquoGabor descriptors foraerial image classificationrdquo in Adaptive and Natural ComputingAlgorithms vol 6594 of Lecture Notes in Computer Science pp51ndash60 Springer Berlin Germany 2011
[32] M Hall E Frank G Holmes B Pfahringer P Reutemann andI H Witten ldquoThe WEKA data mining software an updaterdquoACM SIGKDD Explorations Newsletter vol 11 no 1 pp 10ndash182009
[33] R C Gonzalez and R E Woods Digital Image ProcessingPrentice-Hall 2002
[34] M-Y Liu O Tuzel S Ramalingam and R Chellappa ldquoEntropyrate superpixel segmentationrdquo in Proceedings of the IEEE Con-ference on Computer Vision and Pattern Recognition (CVPR rsquo11)pp 2097ndash2104 IEEE Providence RI USA June 2011
[35] O Veksler Y Boykov and P Mehrani ldquoSuperpixels and super-voxels in an energy optimization frameworkrdquo in ComputerVisionmdashECCV 2010 vol 6315 of Lecture Notes in ComputerScience pp 211ndash224 Springer Berlin Germany 2010
[36] X Ren and J Malik ldquoLearning a classification model for seg-mentationrdquo in Proceedings of the 9th IEEE International Confer-ence on Computer Vision vol 1 pp 10ndash17 IEEE Nice FranceOctober 2003
[37] J Reitberger C I Schnorr P Krzystek and U Stilla ldquo3D Seg-mentation of single trees exploiting full waveform LIDAR datardquoInternational Society for Photogrammetry and Remote Sensingvol 64 no 6 pp 561ndash574 2009
[38] J Liu J Shen R Zhao and S Xu ldquoExtraction of individualtree crowns from airborne LiDAR data in human settlementsrdquoMathematical andComputerModelling vol 58 no 3-4 pp 524ndash535 2013
[39] A Saxena M Sun and A Y Ng ldquoMake3D learning 3D scenestructure froma single still imagerdquo IEEETransactions onPatternAnalysis and Machine Intelligence vol 31 no 5 pp 824ndash8402009
[40] S KlucknerM Donoser andH Bischof ldquoSuper-pixel class seg-mentation in large-scale aerial imageryrdquo in Proceedings of the34th Annual Workshop of the Austrian Association for PatternRecognition (OeAGM rsquo10) pp 131ndash138 Zwettl Austria May2010
[41] F Morsdorf E Meier B Allgower and D Nuesch ldquoClusteringin airborne laser scanning raw data for segmentation of singletreesrdquo International Archives of the Photogrammetry RemoteSensing and Spatial Information Sciences vol 34 part 3 p W132003
[42] M Vastaranta V Kankare M Holopainen X Yu J Hyyppaand H Hyyppa ldquoCombination of individual tree detection andarea-based approach in imputation of forest variables usingairborne laser datardquo ISPRS Journal of Photogrammetry andRemote Sensing vol 67 pp 73ndash79 2012
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of
![Page 14: Research Article Individual Building Rooftop and Tree Crown ...downloads.hindawi.com/journals/js/2016/1795205.pdfmented to segment trees from the aerial urban images []. However, this](https://reader034.dokumen.tips/reader034/viewer/2022052011/6026f192f39ef91648727de5/html5/thumbnails/14.jpg)
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of