Embed Size (px)
Citation preview
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
1
Requirements of Wall Cleaning and Development of Climbing Robot
Dr. Houxiang Zhang
TAMS University of Hamburg
18.4.2005
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
2
OutlineOutline
● Background of climbing and cleaning robots● Basic functions provided by cleaning
robots ● Pneumatic glass wall cleaning robots● My new project
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
3
Background of Background of CCleaning leaning RRobotsobots

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
4
Outer Outer GGlass lass WWall all CCleaning leaning

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
5
Benefits of Benefits of DDeveloping the eveloping the GGlass lass WWall all CCleaning leaning RRobotobot
● Realize automatic cleaning of high- rise buildings, thus improving the technological level
● Saving the cost of installing expensive investment for permanent gondola systems at the individual building.
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
6
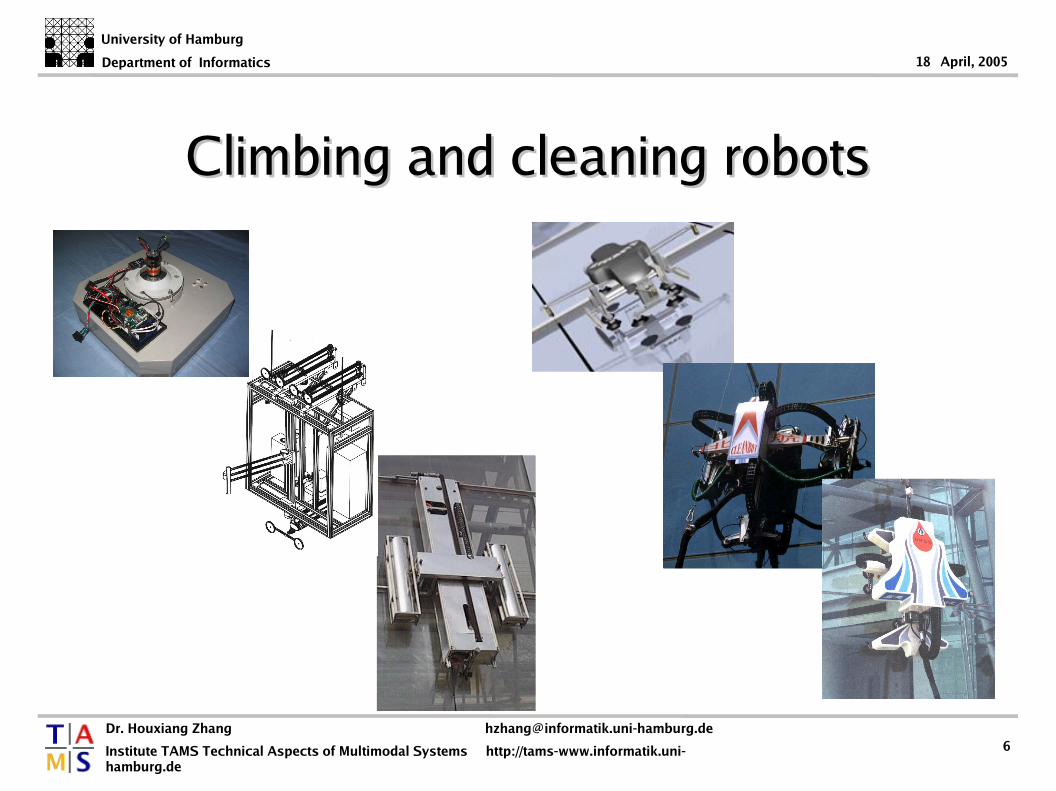
Climbing and cleaning robotsClimbing and cleaning robots

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
7
Basic functions provided by cleaning Basic functions provided by cleaning robotrobots s
● Safe and reliable attachment to the glass surface● Movement spreading over all the working areas● The ability of crossing window obstacles● Enough intelligence for the discrimination of a variety of obstacle
situations ● Working autonomously with the corresponding effective treatment ● Motion control function● Friendly Graphical User Interface● Efficient cleaning

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
8
Why Designing Pneumatic RobotsWhy Designing Pneumatic Robots
• Advantages1. With the pneumatic actuators the climbing robot can be made lightweight,
which is one of the most important specifications for devices working on high-rise buildings.
2. Because of the compressibility of air, the motion driven by pneumatic actuators has a passive compliance, which makes the robot safer than being driven by motors under the situation of interacting with the glass.

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
9
Advantages of the pneumatic systemAdvantages of the pneumatic system
Definition
5.297.2111.72Power-to-weight ratio
12.6610.46.4Total weight Gdrive (Kg)
0.50.50.5Connectors (Kg)
6.0<1.0<1.0Weight for actuator(Kg)
6.168.94.9Weight for linear unit(Kg)
5019.6110MZ(NM)
8758.8110MY(NM)
1619.639MX(NM)
67.075.075.0Fdrive(Kg)
WH50/400MYC-40046140/400Model
SMCNORGREN
Electrical
NEFF
Pneumatic
Driven linear guidance units
Items
Power-to-weight ratio=F driveGdrive
A linear cylinder is 1-2 times lighter than a motor-driven linear-motion unit with the similar specifications.
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
10
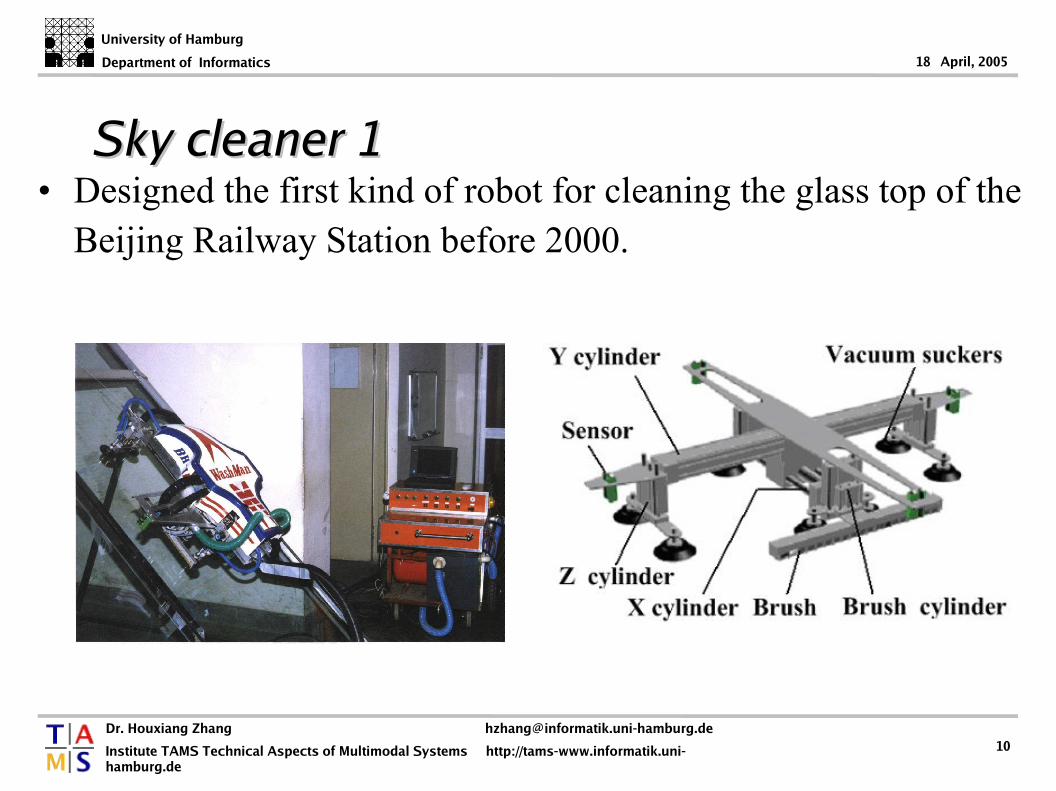
Sky cleaner 1Sky cleaner 1 • Designed the first kind of robot for cleaning the glass top of the
Beijing Railway Station before 2000.
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
11
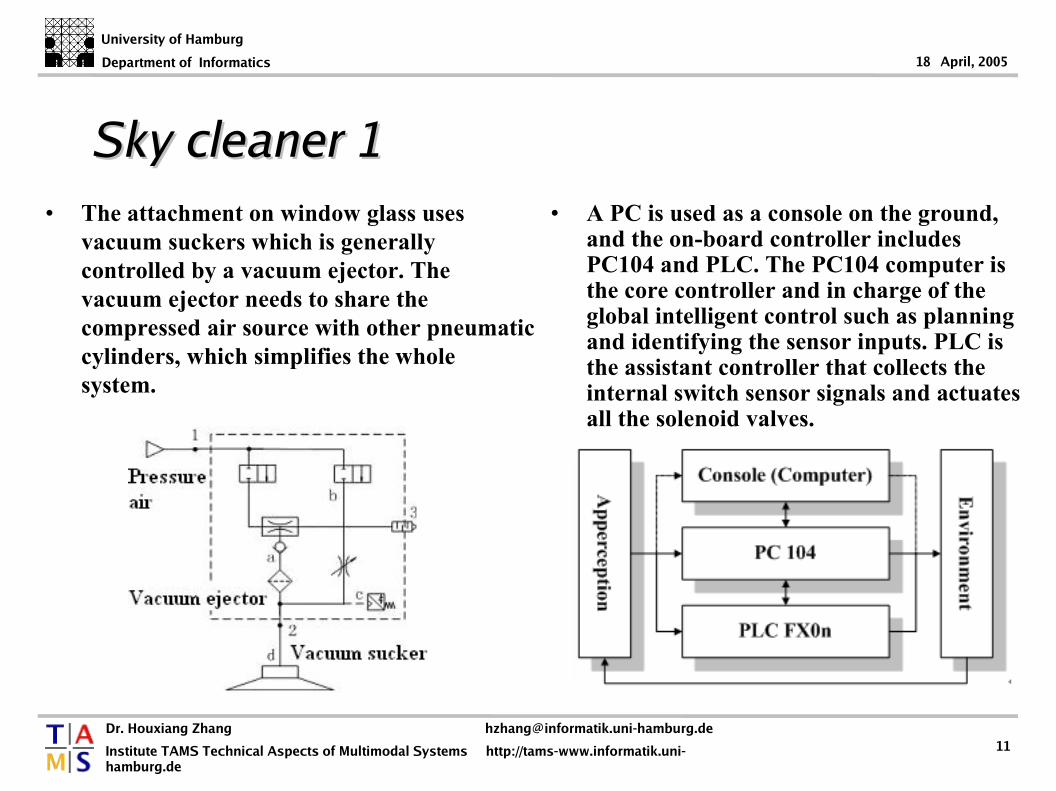
Sky cleaner 1Sky cleaner 1• A PC is used as a console on the ground,
and the on-board controller includes PC104 and PLC. The PC104 computer is the core controller and in charge of the global intelligent control such as planning and identifying the sensor inputs. PLC is the assistant controller that collects the internal switch sensor signals and actuates all the solenoid valves.
• The attachment on window glass uses vacuum suckers which is generally controlled by a vacuum ejector. The vacuum ejector needs to share the compressed air source with other pneumatic cylinders, which simplifies the whole system.

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
12
Sky cleaner 1Sky cleaner 1
• It cannot work on a vertical wall.• Because it has no waist joint, the robot is unable to correct the direction of motion.• Cleaning efficiency is only about 37.5 m2/ hour.

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
13
Sky cleaner Sky cleaner 22• The following project was aimed at developing a cost-
effective, mobile robotic system for moving on vertical glass walls and high quality cleaning on the surfaces of high-rise curtain walls.

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
14
Sky cleaner Sky cleaner 22• It featured with 16 suction pads• A pair of cylinders provides both vertical and horizontal motion• A specially designed waist joint gives a turning motion to the robot.
• The robot is portable and cleaning efficiency is about 75 m2/ hour. But considerable stress was laid on weight reduction the stiffness is somewhat low so that there is a small distortion while cleaning.

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
15
Sky cleaner Sky cleaner 33

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
16
The Robotic The Robotic SystemSystem

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
17
Sky cleanerSky cleaner 3 3
On opposite ends in the Y direction there are also four brush cylinders, which actuate the brushes up and down. An adaptive cleaning head is designed especially for effective, efficient and safe cleaning, equipped with a drainage collecting device.
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
18
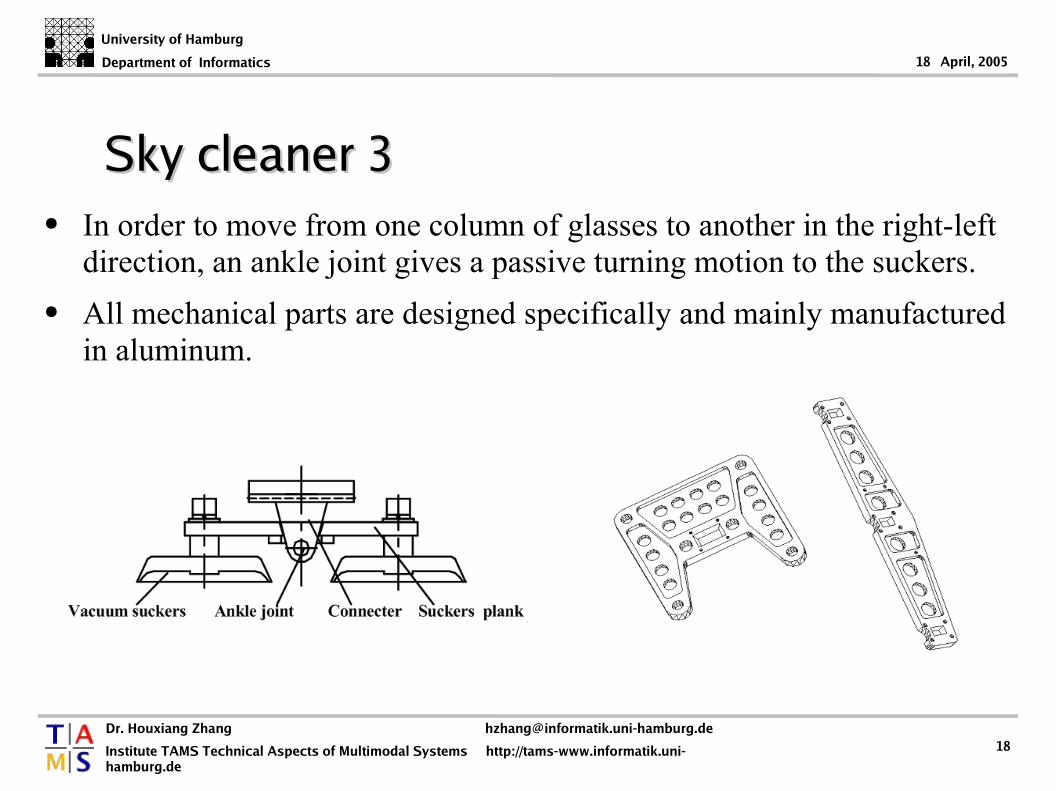
Sky cleanerSky cleaner 3 3 ● In order to move from one column of glasses to another in the right-left
direction, an ankle joint gives a passive turning motion to the suckers.
● All mechanical parts are designed specifically and mainly manufactured in aluminum.

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
19
Control Control IImplementationmplementation

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
20
Some Pics about Cleaning in Some Pics about Cleaning in ShanghaiShanghai

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
21
ConclusionConclusionss
1-21-21Operators
50(reused)50(reused)50(reused)Supply water(L/hour)
Supporting vehicle and following unit
Supporting vehicle and following unitSupporting vehicleSupporting unit
1136×736×3771220×1340×370935×900×320Body Mass(mm3):
Length×Width×Height
452525Weight (kg)
Window frame:10×60;Seal:-1×20
Window frame:30×60;Seal: -1×20
Window frame:30×60
Cross obstacles (mm2):Height×Width
100-1257537.5Efficiency(m2/8 hours)
Glass wall 0°-90°(with < 2° angle)Glass wall 0°-90°Glass wall 0°-45°Target character
Sky Cleaner 3Sky Cleaner 2Sky Cleaner 1 Type Capability

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
22
Open Topic for Future ResearchOpen Topic for Future Research
● Research on Climbing Mechanism
● Evaluation on the Path Planning for Wall-climbing Robot by Synthesis of Standards
● Smart climbing robot

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
23
A miniature wall-climbing robotic platform for rescue A miniature wall-climbing robotic platform for rescue missionsmissions
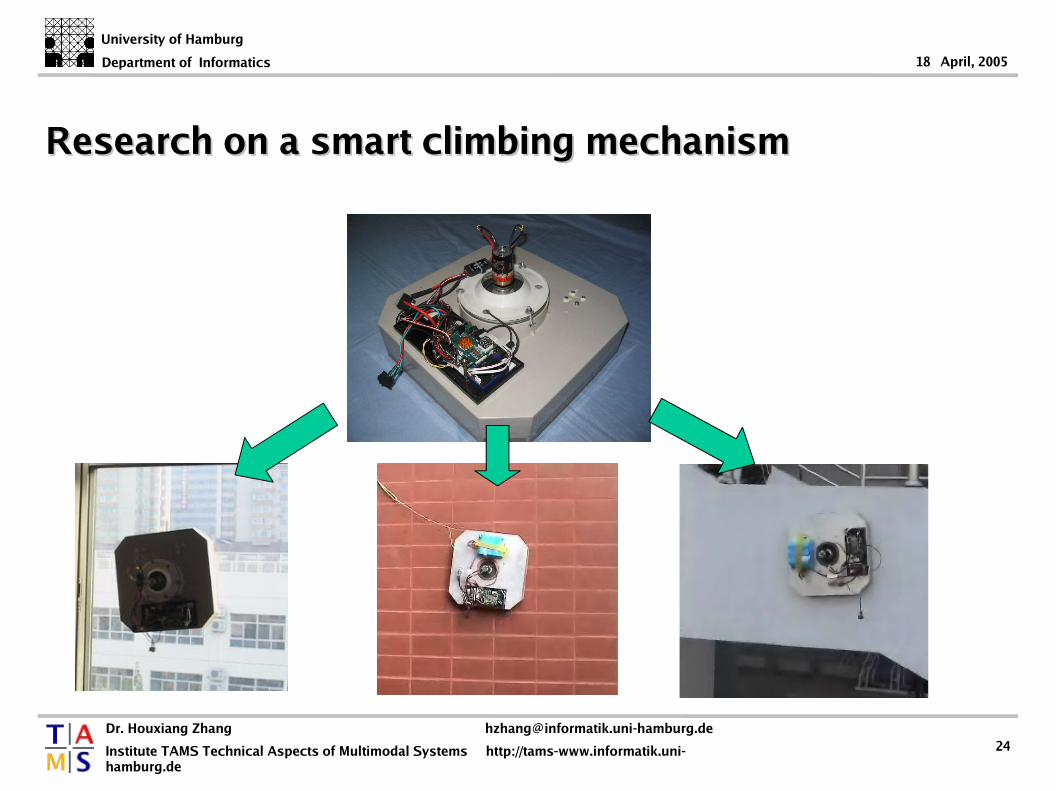
• Our backgroundWe proposed a lightweight smart wall-climbing robot for rescue missions last year, which was developed as a flexible mobile platform carrying a CCD camera and other sensors. Firstly we designed a semi-autonomous climbing prototype with wheels and negative pressure, as shown in Fig. This prototype is only 390mm wide and 390mm long, the weight is 5kg including the battery.
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
24
Research on a smart climbing mechanismResearch on a smart climbing mechanism

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
25
A miniature wall-climbing robotic platform for rescue A miniature wall-climbing robotic platform for rescue missionsmissions
Miniaturization Modularization Flexibility Multi-function
This robotic system is with five same modules. The mechanical structure is reconstructed flexible due to special connection joints.

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
26
Main specificatitons Main specificatitons
● Climbing ability on walls of different materials such as glass, metal, plastic, tiles;
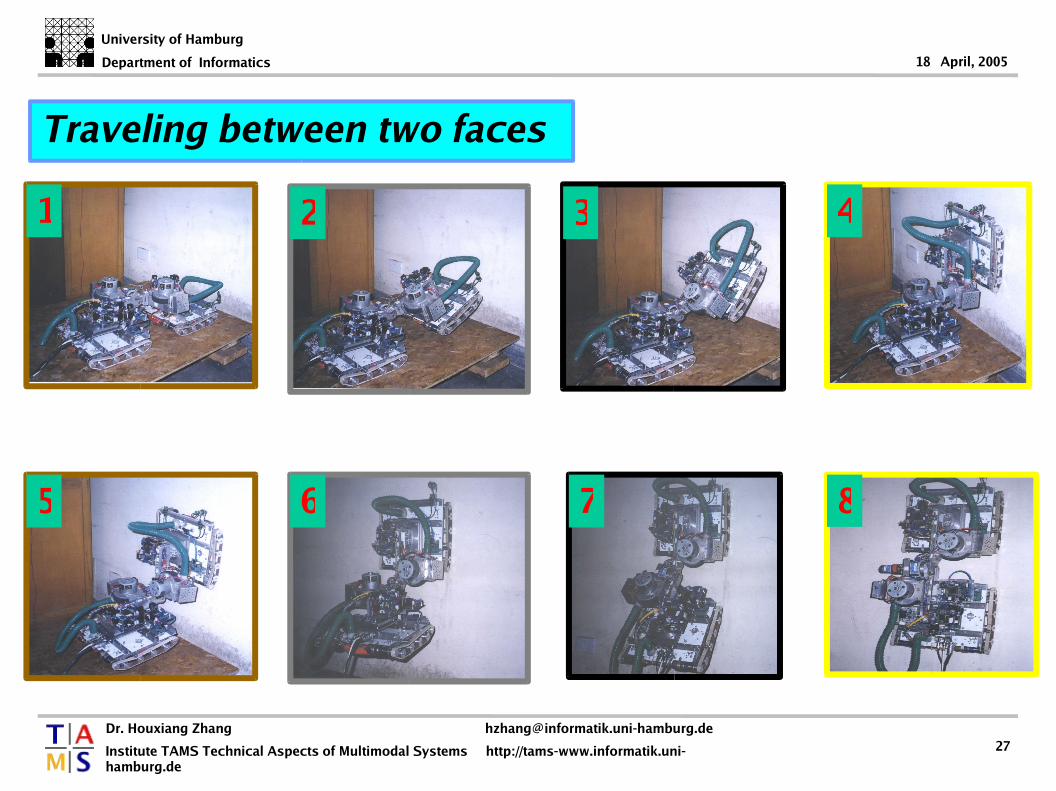
● Velocity of movement: about 100mm/s;● Traveling between surfaces with a 0-90 degrees angle;● The ability to cross obstacles (Height×Width =50mm ×50mm ) ● Gross weight: 6 Kg;● Carrying tools and sensors;● Few connection with the remote GUI.
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
27
1 2 3 4
5 6 7 8
Traveling between two faces
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
28
What I am working on for this proposal now…What I am working on for this proposal now…
• Designing a new mechanical module in detail;
• Making a simulation;
• Adding some things on sensory fusion;
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
29
Thanks a lot!Questions?

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
30
Research on Climbing MechanismResearch on Climbing Mechanism
1 Trunk kinematics
Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
31
Research on Climbing MechanismResearch on Climbing Mechanism
2 Multiple-legs kinematics

Dr. Houxiang Zhang [email protected]
Institute TAMS Technical Aspects of Multimodal Systems http://tams-www.informatik.uni-hamburg.de
University of Hamburg
Department of Informatics 18 April, 2005
32
Research on Climbing MechanismResearch on Climbing Mechanism
gecko