Embed Size (px)
DESCRIPTION
Reconfigurable Control Strategies: Towards Fault – Tolerant and High – Confidence Systems. George Vachtsevanos Georgia Institute of Technology Atlanta GA 30332-0250 SWAN ’06 The University of Texas at Arlington. December 7 – 9, 2006. Flight Results – Bob Up. Collective Failure Scenario. - PowerPoint PPT Presentation
Citation preview

Reconfigurable Control Strategies: Towards Fault – Tolerant and High –
Confidence Systems
George VachtsevanosGeorgia Institute of Technology
Atlanta GA 30332-0250
SWAN ’06The University of Texas at Arlington
December 7 – 9, 2006

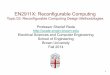
Flight Results – Bob Up

Collective Failure Scenario
•T = 0s
•T = 5s•Speed 25 ft/s
•Altitude 250 ft
Stuck Collective at Stuck Collective at point Bpoint B
Stuck Collective at Stuck Collective at point Bpoint B
A
CB
•Hover at 15ft
Without RPM controlWithout RPM control
With RPM controlWith RPM control

Man
eu
vera
bil
ity
Speed
Nominalcapability
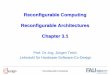
The Problem
“Improving UAV reliability is the single most immediate and long reaching need to ensure their success.” - OSD UAV Roadmap 2002-2027
Unmanned aerial vehicles require a fault-tolerant control (FTC) architecture that allows them to generate and track safe flight paths before and after the occurrence of a fault.
Degradedcapability
Human pilots
FTCReconfig-urable flightcontrol
Vehiclecapability
Human pilots
Ma
neu
ve
rab
ilit
y
Traditionalcontrolmethods Speed
Vehiclecapability
Human pilots
Ma
neu
ve
rab
ilit
y
Traditionalcontrolmethods Speed

The Anatomy of a Failure
Hydraulic fluid swapped for engine oil during maintenance
More volatile lubricant evaporates increasing friction
IGB output bearing overheats
Bearing fails from excessive heat
SH-60 loses tail-rotor authority
SH-60 grounded for IGB servicing
Hydraulic Fluid Runs Red by LCdr. Patrick Kennedy
Mech, Winter 2001
30 mins into flight the helicopter with crew autorotates into the sea30 mins into flight the helicopter with crew autorotates into the sea

“Retired Marine Lt. Gen. Bernard Trainor said the issue of aging aircraft is a constant complaint of all branches of service.”
Atlanta Journal ConstitutionApril 27, 2002
Aircraft Mishaps/Failure Modes

0 0.5 1 1.5 2 2.5 3 3.5
x 104
-1
0
1x 10
4 Simulated Vibration Signal
0 0.5 1 1.5 2 2.5 3 3.5
x 104
-5
0
5x 10
4 TSA of Vibration
200 300 400 500 600 700 800 9000
2
4
6
8x 10
7 FFT of TSA
1100 1110 1120 1130 1140 1150 1160 1170 11800
1
2
3x 10
7 Close-up view of Fifth Mesh Harmonic
0 0.5 1 1.5 2 2.5 3 3.5
x 104
-1
0
1x 10
4 Simulated Vibration Signal
0 0.5 1 1.5 2 2.5 3 3.5
x 104
-5
0
5x 10
4 TSA of Vibration
200 300 400 500 600 700 800 9000
2
4
6
8x 10
7 FFT of TSA
1100 1110 1120 1130 1140 1150 1160 1170 11800
1
2
3x 10
7 Close-up view of Fifth Mesh Harmonic
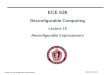
Testing/Seeded Fault Data Modeling
Reasoning Architecture for Diagnosis-Prognosis
IntermediateGearbox (IGB)fitted with VMEP sensors to monitor components
• Prevent unscheduled maintenance• Assist the pilot in making intelligent decisions about air-worthiness
VMEP/HUMSmodules
Testing, Modeling, and Reasoning Architecture for Fault Diagnosis and Failure Prognosis

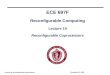
The Fault Diagnosis/Prognosis Architecture
SystemSystemSensor Data
0 0 . 5 1 1 . 5 2 2 . 5
x 1 04
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
Sensor Data0 0 . 5 1 1 . 5 2 2 . 5
x 1 04
- 0 . 6
- 0 . 4
- 0 . 2
0
0 . 2
0 . 4
0 . 6
0 . 8
De-NoisingFeature
Extraction
Particle Filter
Preprocessed Data
0 0.5 1 1.5 2 2.5
x 104
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Preprocessed Data
0 0.5 1 1.5 2 2.5
x 104
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
PrognosisPrognosis
Particle Filter
Particle Filter
Experimental Data
0 0 . 5 1 1 . 5 2 2 . 5
x 1 04
- 0 .6
- 0 .4
- 0 .2
0
0 . 2
0 . 4
0 . 6
0 . 8
Experimental Data
0 0 . 5 1 1 . 5 2 2 . 5
x 1 04
- 0 .6
- 0 .4
- 0 .2
0
0 . 2
0 . 4
0 . 6
0 . 8
System Model for Diagnosis
McFadden
System Model for Diagnosis
McFadden
RULRUL
Simulated Data
Simulated Data
Noise ModelsNoise Models
Feature Extraction &
Mapping Techniques
Feature Extraction &
Mapping Techniques
Data Driven Methods
Data Driven Methods
De-Noising TechniquesDe-Noising Techniques
DiagnosisDiagnosis
HUMSHUMS
Offline Modules
Online Modules
Fault Growth
Flight Regime Data & Model Parameter
Tuning
Loading Profile Fault GrowthFault
Growth
Flight Regime Data & Model Parameter
Tuning
Loading Profile
System Model for Prognosis
Features & Mapping
0 1 2 3 4 5 6 7 80.2
0.4
0.6
0.8
1
1.2
1.4
1.6
crack length0 1 2 3 4 5 6 7 8
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
crack length0 1 2 3 4 5 6 7 8
0 .2
0 .4
0 .6
0 .8
1
1 .2
1 .4
1 .6
c ra c k le n g th
Features & Mapping
0 1 2 3 4 5 6 7 80.2
0.4
0.6
0.8
1
1.2
1.4
1.6
crack length0 1 2 3 4 5 6 7 8
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
crack length0 1 2 3 4 5 6 7 8
0 .2
0 .4
0 .6
0 .8
1
1 .2
1 .4
1 .6
c ra c k le n g th
Stress TableCrack Length Kmin Kmax
1.5 30.29 27.922 27.25 25.68
2.5 21.52 21.233 19.47 17.82
Stress TableCrack Length Kmin Kmax
1.5 30.29 27.922 27.25 25.68
2.5 21.52 21.233 19.47 17.82
Stress TableCrack Length Kmin Kmax
1.5 30.29 27.922 27.25 25.68
2.5 21.52 21.233 19.47 17.82
Crack Length Kmin Kmax
1.5 30.29 27.922 27.25 25.68
2.5 21.52 21.233 19.47 17.82

Space Engine Fault Accommodation
Body FlapControllers
ElevonControllers
RudderControllers
Component Degradation andSystem Performance Model
(From Task 2)
Prognostic & DiagnosticAlgorithms
(From Task 4)
Run-TimeDemo System
Actuator Commands
ActuatorPerformance Data
System Requirements(Task 1)
Model Validation(Task 3)
Integrated Flight Control System Logic(From Task 5)

Proposed Architecture
Mission AdaptationMission Assignment
FDIFDI
Baseline ControllerReconfigurable Flight Controllers:
coll
tr
aft
right
left
coll
tr
aft
right
left
coll
tr
aft
right
left
coll
tr
aft
right
left
Reconfigurable Flight Controllers:coll
tr
aft
right
left
coll
tr
aft
right
left
coll
tr
aft
right
left
coll
tr
aft
right
left
coll
tr
aft
right
left
coll
tr
aft
right
left
coll
tr
aft
right
left
coll
tr
aft
right
left
System ID
Reconfigurable Path Planner
Active System Restructuring
Baseline Path Planner
FAULT DECLARATION
FLIGHT PATH
FL
IGH
T P
AT
H
UAV MODEL
FL
IGH
T P
AT
H
CO
NT
RO
LS
UA
V L
IMIT
AT
ION
S
WA
YP
OIN
TS
WA
YP
OIN
TS
RE
ST
RU
CT
UR
ING
INS
TR
UC
TIO
NS
TIE
R 1
TIE
R 2
TIE
R 3
HUMAN INTERFACE
VEHICLE INTERFACE
CONTROLS

S/P Actuator A A
S/P Actuator B B
S/P Actuator C C
Tail Rotor Pitch tr
S/P Actuator A A
S/P Actuator B B
S/P Actuator C C
Tail Rotor Pitch tr
Helicopter Active System Restructuring
• RPM control – Collective– Tail rotor– Swashplate actuators
Active Control:Active Control:
com
coll
S/P Actuator A A
S/P Actuator B B
S/P Actuator C C
Tail Rotor Pitch tr
Main Rotor RPM com
S/P Actuator A A
S/P Actuator B B
S/P Actuator C C
Tail Rotor Pitch tr
Main Rotor RPM com
Long. Cyclic lon
Lateral Cyclic lat
Collective Pitch coll
Tail Rotor Pitch tr
Long. Cyclic lon
Lateral Cyclic lat
Collective Pitch coll
Tail Rotor Pitch tr
Alternate means of restructuring employ: tandem rotors, stabilator control, individual blade control, jettisoning of stores
com
Long. Cyclic lon
Lateral Cyclic lat
Collective Pitch coll
Tail Rotor Pitch tr
Main Rotor RPM com
Long. Cyclic lon
Lateral Cyclic lat
Collective Pitch coll
Tail Rotor Pitch tr
Main Rotor RPM com
Long. Cyclic lon
Lateral Cyclic lat
Collective Pitch coll
Tail Rotor Pitch tr
Long. Cyclic lon
Lateral Cyclic lat
Collective Pitch coll
Tail Rotor Pitch tr

• Adapts the position, velocity, acceleration, and/or jerk for the assigned waypoints
• Provides a simple exportable model (HURT)• Implies a change to the aircraft time of
arrival• With or without reconfigurable path planning
Mission Adaptation
Mission 1 (Unmanned Supply Sustainment)
Fault Tolerant Control
(SSCI/GT)
FlightControl
Malfunction
Fly Autonomously (OGI-SDRE)
ExtremeManeuvers -
(Draper-AMGL)
PZ LZ
Mode Transitioning(GT)
Mission 1 (Unmanned Supply Sustainment):• Trajectory Generation (GT, Draper, SSCI)• Mode Transitioning (GT)• Fault Tolerance / Low Level Control (GT, SSCI, OGI)• Extreme Maneuvers (GT, Draper)
External Load
+
+
Adaptive NN Flight Controller(GT)

Reconfigurable Flight Control
Active Control:Active Control:
Longitudinal Cyclic lon
Lateral Cyclic latCollective Pitch coll
Tail Rotor Pitch trMain Rotor RPM com
Longitudinal Cyclic lon
Lateral Cyclic latCollective Pitch coll
Tail Rotor Pitch trMain Rotor RPM com
Baseline controller
Inverted Model
PD
Reference Model
RPM sensor:
Feedback Linearization:
-+com t Plant
AdaptiveNeuralNetwork

Flight Results - Stuck Collective

Challenges for Control Engineers
• Robust, reliable and timely fault diagnosis and prognosis• Interface requirements to system controllers• System design to accommodate fault isolation, system
restructuring and control reconfiguration• Control reconfiguration technologiesHigh Confidence Systems!

Intelligent Fault Diagnosis and Prognosis for Engineering Systems